Embed Size (px)
Citation preview
Differential Differential Equations Equations
BrannanCopyright © 2010 by John Wiley & Sons,
Inc. All rights reserved.
Chapter 08: Series Solutions of SecondOrder Linear Equations
Chapter 8 Chapter 8 Series Solutions of Second Order Linear EquationsThe general solution of a linear second order
equation P(x)y'' + Q(x)y' + R(x)y = 0 is y = c1y1(x) + c2y2(x), where y1 and y2 are a fundamental set of solutions of the differential equation.
To deal with equations that have general nonconstant coefficients, we need alternative solution techniques. For some applications we may find that approximations using an initial value problem solver are satisfactory for our needs. However there are some variable coefficient equations that frequently recur in applications where infinite series representation of solutions useful.
Chapter 8 - Chapter 8 - Series Solutions of Second Order Linear Equations8.1 Review of Power Series8.2 Series Solutions Near an Ordinary Point,
Part I8.3 Series Solutions Near an Ordinary Point,
Part II8.4 Regular Singular Points8.5 Series Solutions Near a Regular Singular
Point, Part I8.6 Series Solutions Near a Regular Singular
Point, Part II8.7 Bessel’s Equation
8.1 Review of Power SeriesDEFINITION 8.1.1 - A power series is an
infinite series of the form
The constants a0, a1, a2, . . . are called the coefficients of the series, the constant x0 is called the center of the series, and x is a variable. Setting x0 = 0 in Eq. (1) gives us a power series centered at x0 = 0:
Convergence ConceptsDEFINITION 8.1.2 A power series
is said to converge at a point x if the sequence of partial sums
converges as m →∞. The sum of the series at the point x is defined to be the limit of the sequence of partial sums, and we write
If the limit of the sequence of partial sums does not exist, then the series is said to diverge at x.
Example
DEFINITION 8.1.3
TheoremsTHEOREM 8.1.4 (absolute convergence
implies convergence)
THEOREM 8.1.5 (The Ratio Test)
Radius of Convergence.If is a power series, then either1. The series converges absolutely for all x, or
2. The series converges only for x = x0, or3. There exists a number ρ > 0 such that
converges absolutely for | x − x0 | < ρ and diverges for
| x − x0 | > ρ.The number ρ in Case 3 is called the radius of
convergence and the interval | x − x0 | < ρ is called theinterval of convergence. This case is illustrated by theshaded region in Figure 8.1.1. We write ρ =∞ in Case 1 andρ = 0 in Case 2. Using these conventions, we can state thateach power series has a radius of convergence ρ, where 0≤ ρ ≤∞. If 0 < ρ < ∞, the series may either converge or
diverge when |x− x0| = ρ.
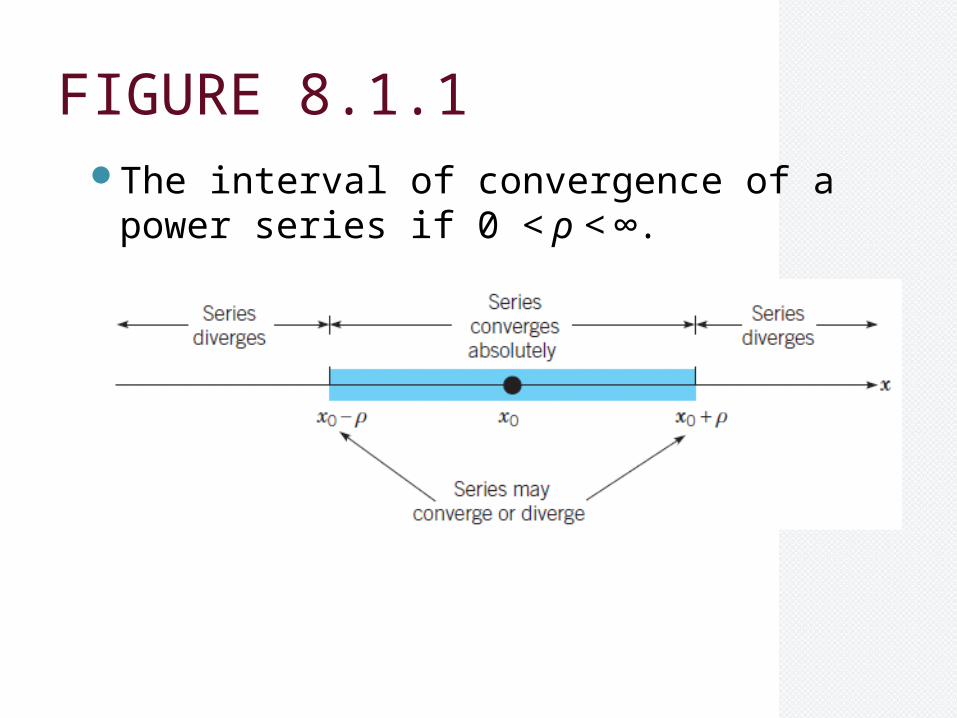
FIGURE 8.1.1The interval of convergence of a power
series if 0 < ρ < ∞.
ExampleQuestion
AnswerThe given power series converges for −3 ≤
x < 1 and diverges otherwise. It converges absolutely for −3 < x < 1 and has a radius of convergence 2.
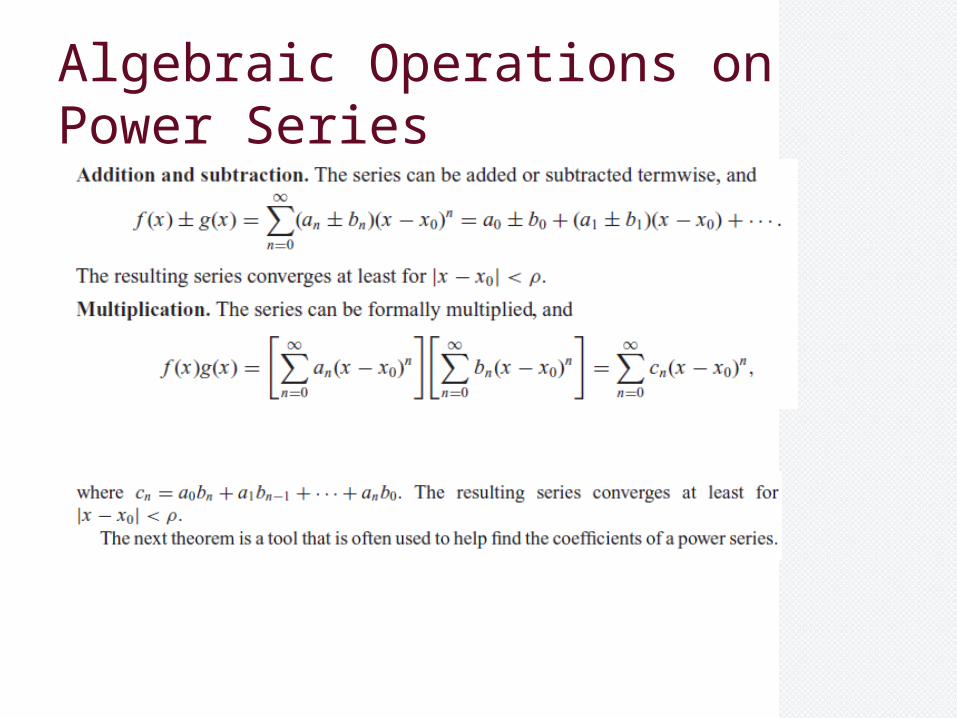
Algebraic Operations on Power Series
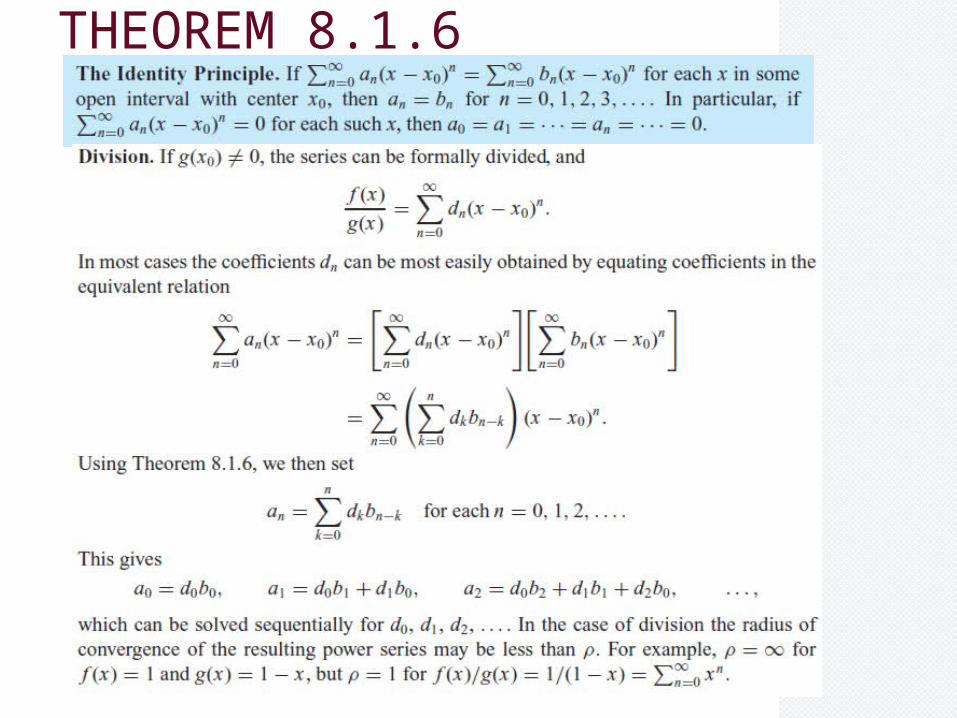
THEOREM 8.1.6
Taylor Series and Analytic Functions
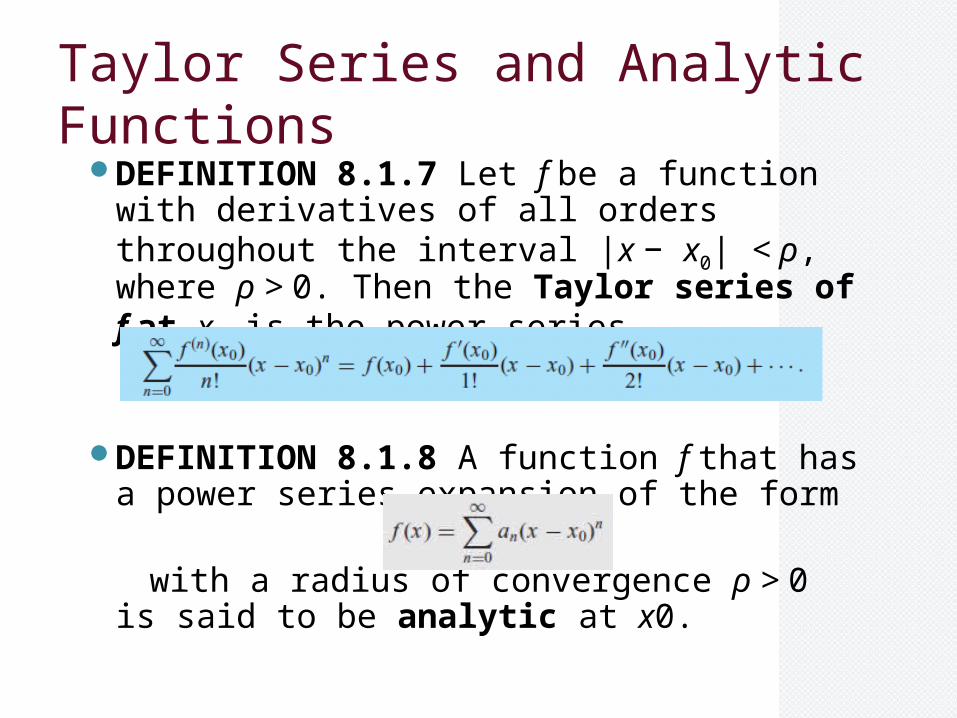
DEFINITION 8.1.7 Let f be a function with derivatives of all orders throughout the interval |x − x0| < ρ, where ρ > 0. Then the Taylor series of f at x0 is the power series
DEFINITION 8.1.8 A function f that has a power series expansion of the form
with a radius of convergence ρ > 0 is said to
be analytic at x0.
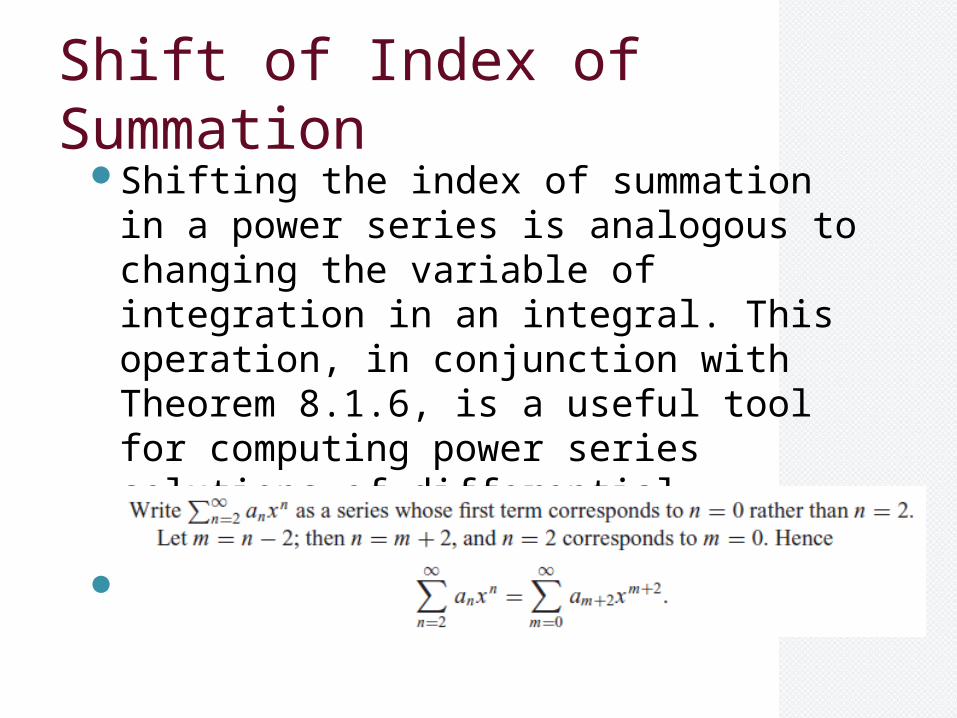
Shift of Index of SummationShifting the index of summation in a power
series is analogous to changing the variable of integration in an integral. This operation, in conjunction with Theorem 8.1.6, is a useful tool for computing power series solutions of differential equations.
EXAMPLE
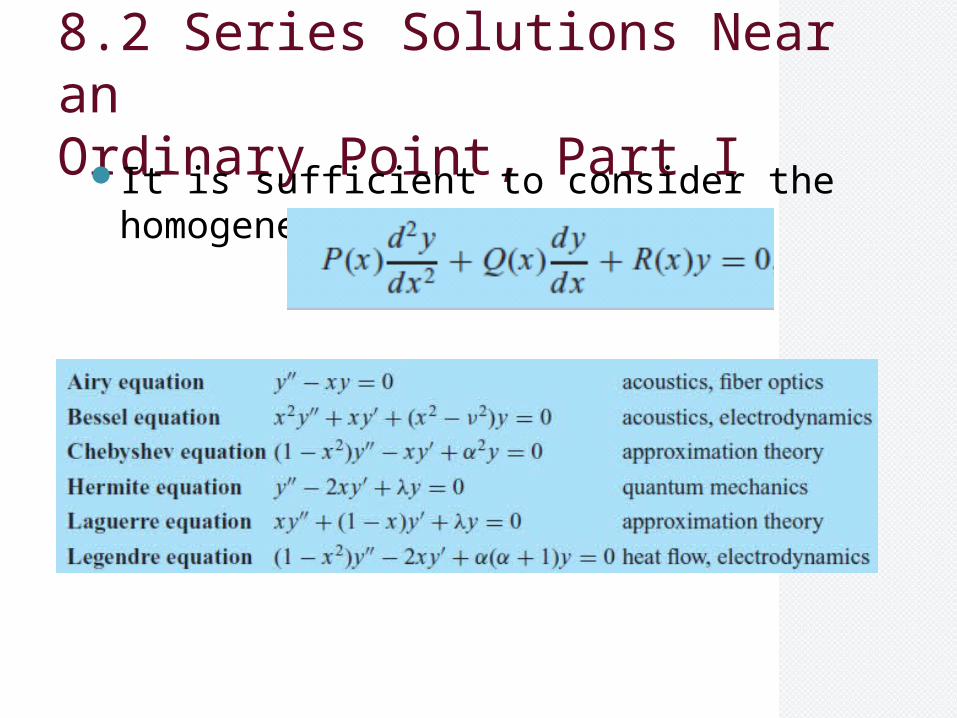
8.2 Series Solutions Near anOrdinary Point, Part I
It is sufficient to consider the homogeneous equation
(1)Examples
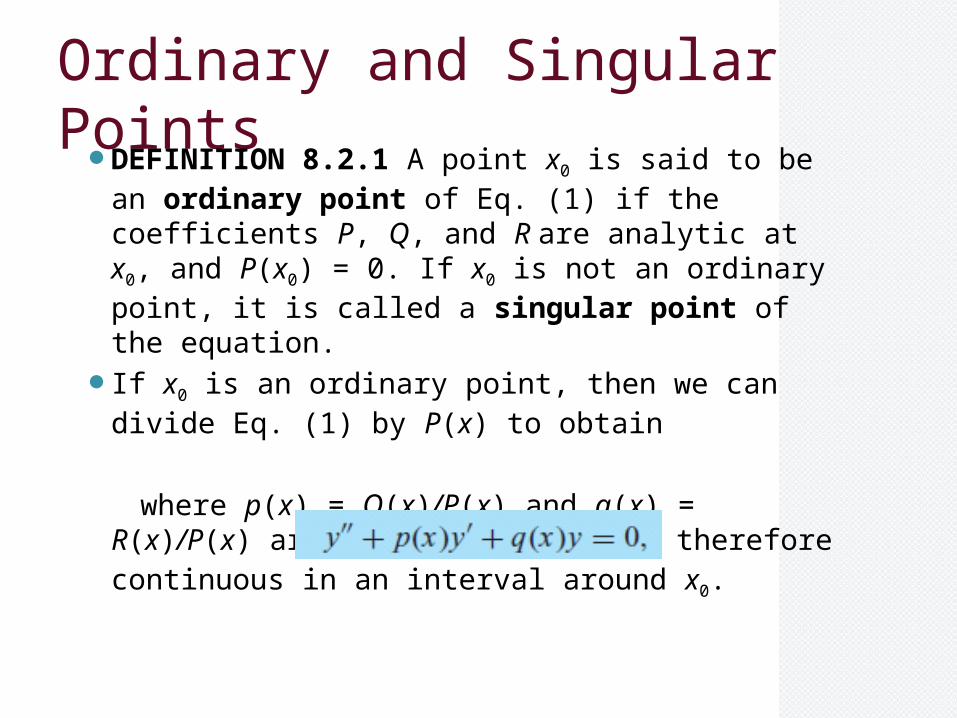
Ordinary and Singular PointsDEFINITION 8.2.1 A point x0 is said to be an
ordinary point of Eq. (1) if the coefficients P, Q, and R are analytic at x0, and P(x0) = 0. If x0 is not an ordinary point, it is called a singular point of the equation.
If x0 is an ordinary point, then we can divide Eq. (1) by P(x) to obtain
where p(x) = Q(x)/P(x) and q(x) = R(x)/P(x) are analytic at x0, and therefore continuous in an interval around x0.
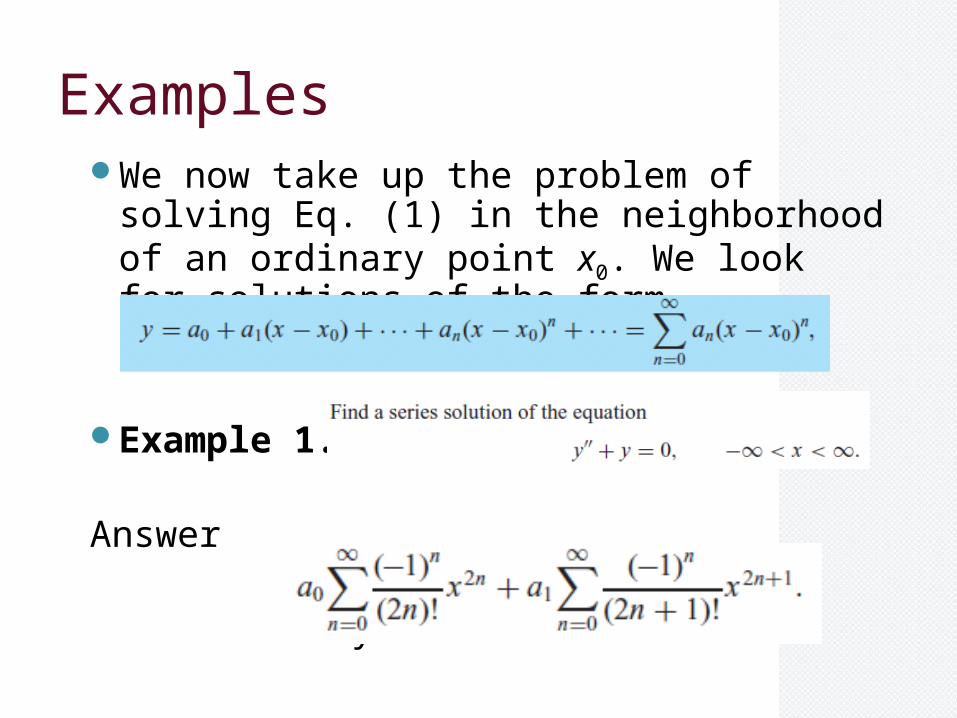
ExamplesWe now take up the problem of solving Eq. (1)
in the neighborhood of an ordinary point x0. We look for solutions of the form
Example 1.
Answer
y =
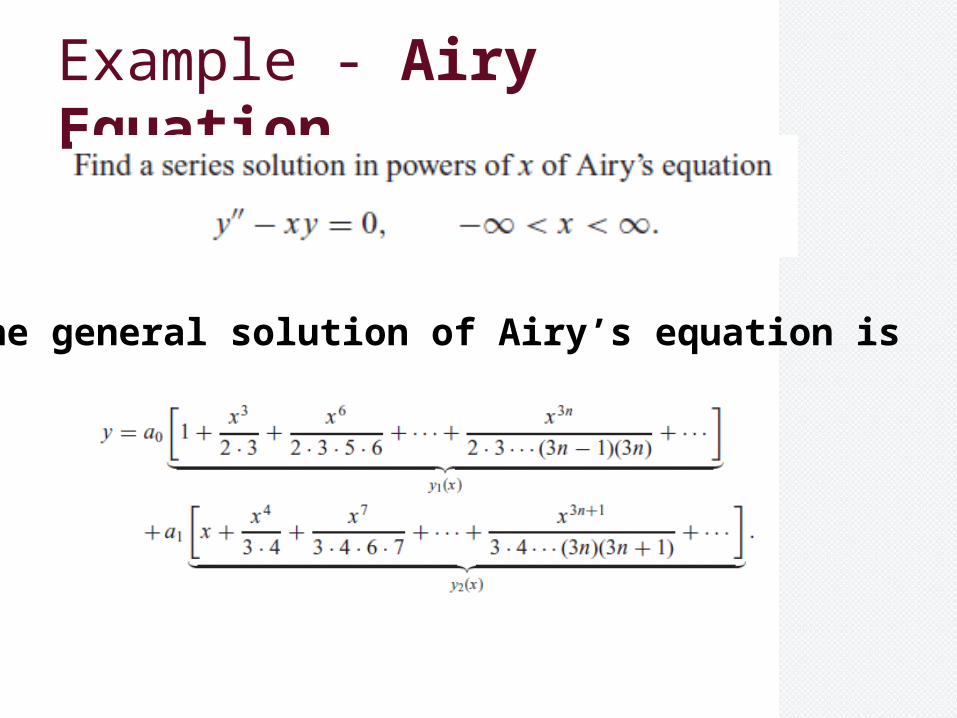
Example - Airy Equation.
The general solution of Airy’s equation is
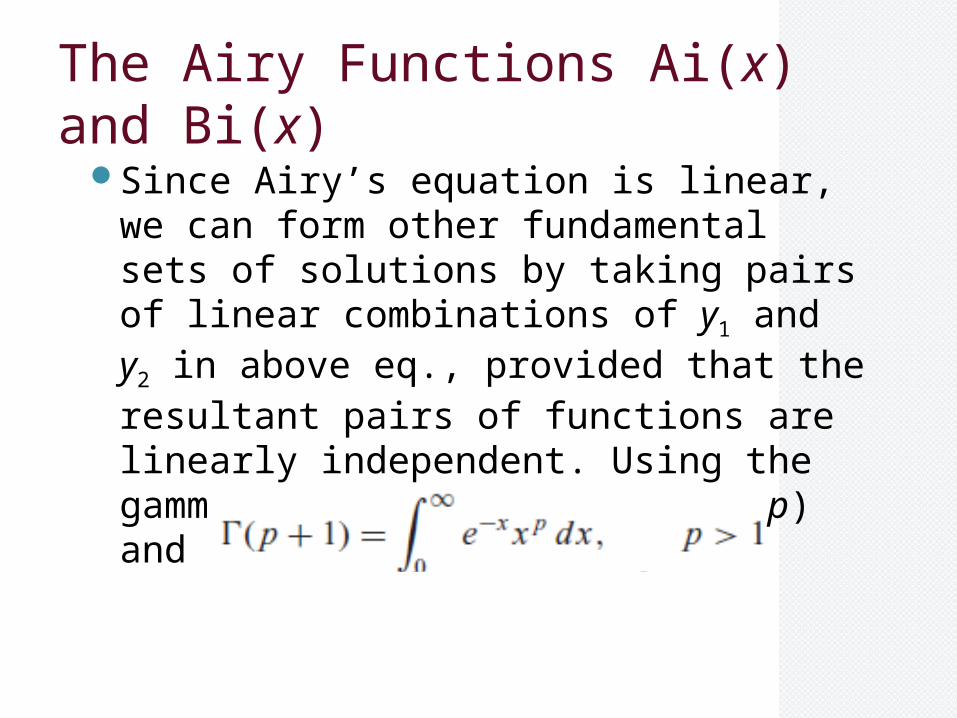
The Airy Functions Ai(x) and Bi(x)
Since Airy’s equation is linear, we can form other fundamental sets of solutions by taking pairs of linear combinations of y1 and y2 in above eq., provided that the resultant pairs of functions are linearly independent. Using the gamma function, denoted by Γ(p) and defined by the integral
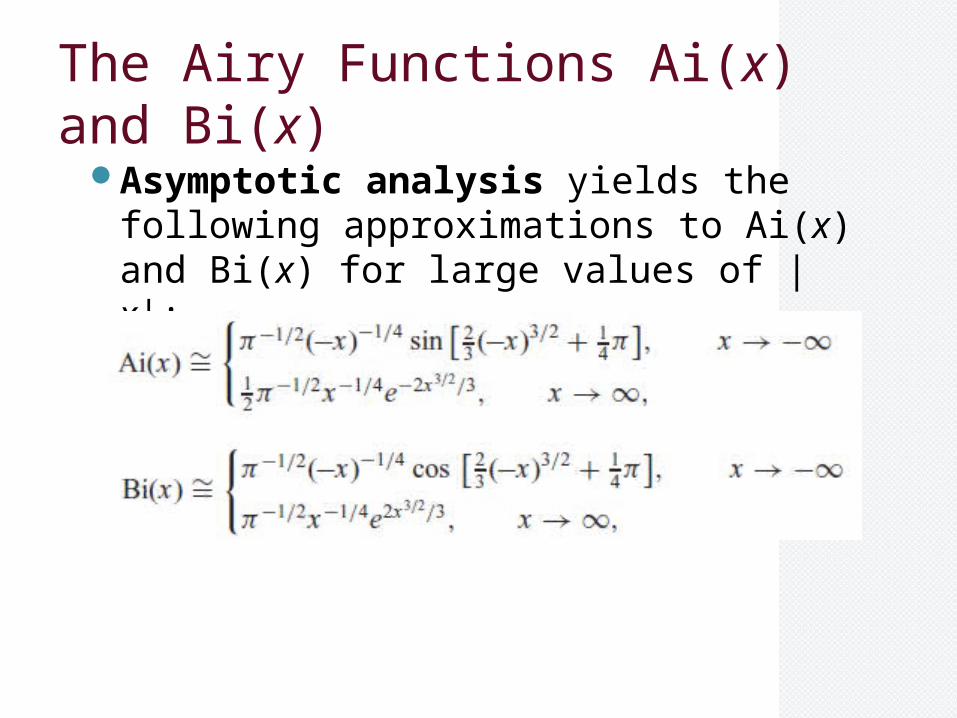
The Airy Functions Ai(x) and Bi(x)
Asymptotic analysis yields the following approximations to Ai(x) and Bi(x) for large values of |x|:
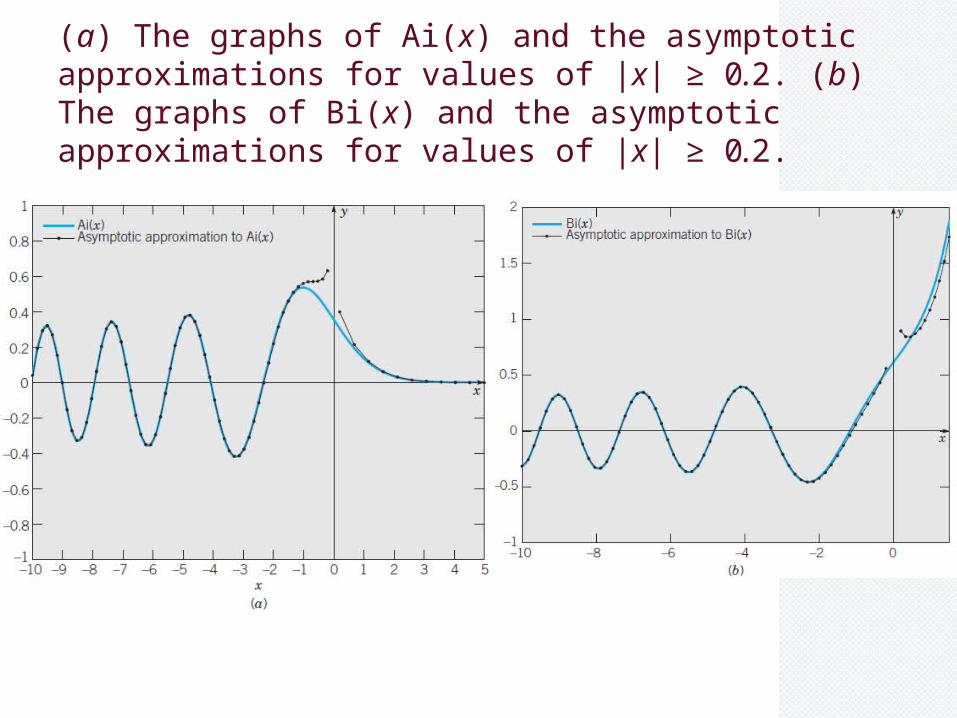
(a) The graphs of Ai(x) and the asymptotic approximations for values of |x| ≥ 0.2. (b) The graphs of Bi(x) and the asymptotic approximations for values of |x| ≥ 0.2.
8.3 Series Solutions Near anOrdinary Point, Part II
In the preceding section, we considered the problem of finding solutions of (1)
where P, Q, and R are polynomials, in the neighborhood of an ordinary point x0. Assuming that Eq. (1) does have a solution y = φ(x) and that φ has a Taylor series (2)
which converges for |x − x0| < ρ, where ρ > 0, we found that the an can be determined by directly substituting the series (2) for y in Eq. (1).
Let us now consider how we might justify the statement that if x0 is an ordinary point of Eq. (1), then there exist solutions of the form (2). We also consider the question of the radius of convergence of such a series.
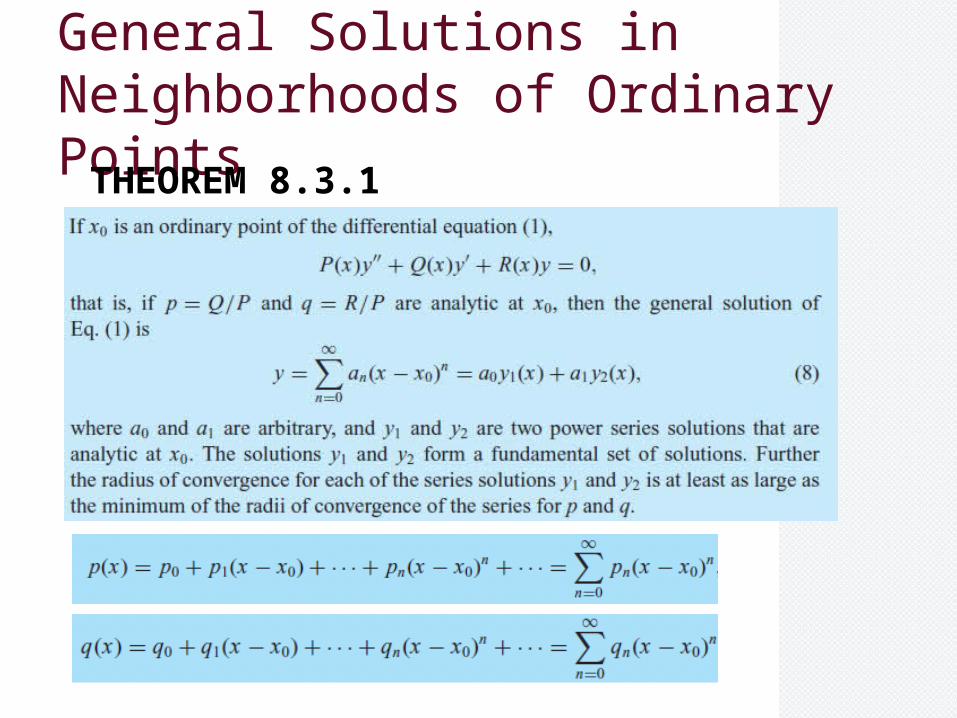
General Solutions in Neighborhoods of Ordinary Points
THEOREM 8.3.1
Examples1. What is the radius of convergence of the
Taylor series for (1 + x2)−1 about x = 0?
2. Determine a lower bound for the radius of convergence of series solutions of the differential equation
(1 + x2)y'' + 2xy' + 4x2 y = 0
about the point x = 0 and about the point x = −1/2.
8.4 Regular Singular PointsWe consider the nonconstant coefficient
equation
P(x)y'' + Q(x)y' + R(x)y = 0, (1)
where x0 is a singular point. This means that P(x0) = 0 and at least one of Q and R is not zero at x0.
Power series method to solve in the neighborhood of a singular point x0, fails.
We need to use a more general type of series expansion to solve.
Cauchy–Euler EquationsA relatively simple differential equation that has a
singular point is the Cauchy–Euler equation,L[y] = x2 y'' + αxy' + βy = 0, (2)
where α and β are real constants. If we assume that Eq. (2) has a solution of the form
y = xr , (3)then we obtainL[xr] = x2(xr) + αx(xr) + β xr = xr [r (r − 1) + αr + β]. (4)
If r is a root of the quadratic equation F(r ) = r (r − 1) + αr + β = 0, (5)
then L[xr] is zero, and y = xr is a solution of Eq. (2).
The roots of Eq. (5) The roots of Eq. (5) are
and F(r) = (r − r1)(r − r2).
Three possible cases:
1. Real, Distinct Roots.
2. Equal Roots.
3. Complex Roots.
1. Real, Distinct Roots.If F(r) = 0 has real roots r1 and r2, with r1 ≠ r2,
then y1(x) = xr1 and y2(x) = xr2 are solutions of Eq. (2).
Since W(xr1 , xr2 ) = (r2 − r1)xr1+r2−1 is nonvanishing for r1 ≠ r2 and x > 0, it follows that the general solution of Eq. (2) is
y = c1xr1 + c2xr2 , x > 0. (7)Note that if r is not a rational number, then xr
is defined by xr = er ln x.Example: Solve
2. Equal Roots.If the roots r1 and r2 are equal, then we
obtain one solution as y1(x) = xr1.A second solution of Eq. (2) is
y2(x) = xr1 ln x, x > 0 By evaluating the Wronskian, we find that
W(xr1 , xr1 ln x) = x2r1−1.Hence xr1 and xr1 ln x are a fundamental set
of solutions for x > 0, and the general solution of Eq. (2) is
y = (c1 + c2 ln x)xr1 , x > 0.Example: Solve
3. Complex Roots.Finally, suppose that the roots r1 and r2
of Eq. (5) are complex conjugates, say, r1 = μ + iν and r2 = μ − iν, with ν = 0.
The general solution of Eq. (2) in this case isy = c1xμ cos (ν ln x) + c2xμ sin (ν ln x),
x > 0.Example: Solve
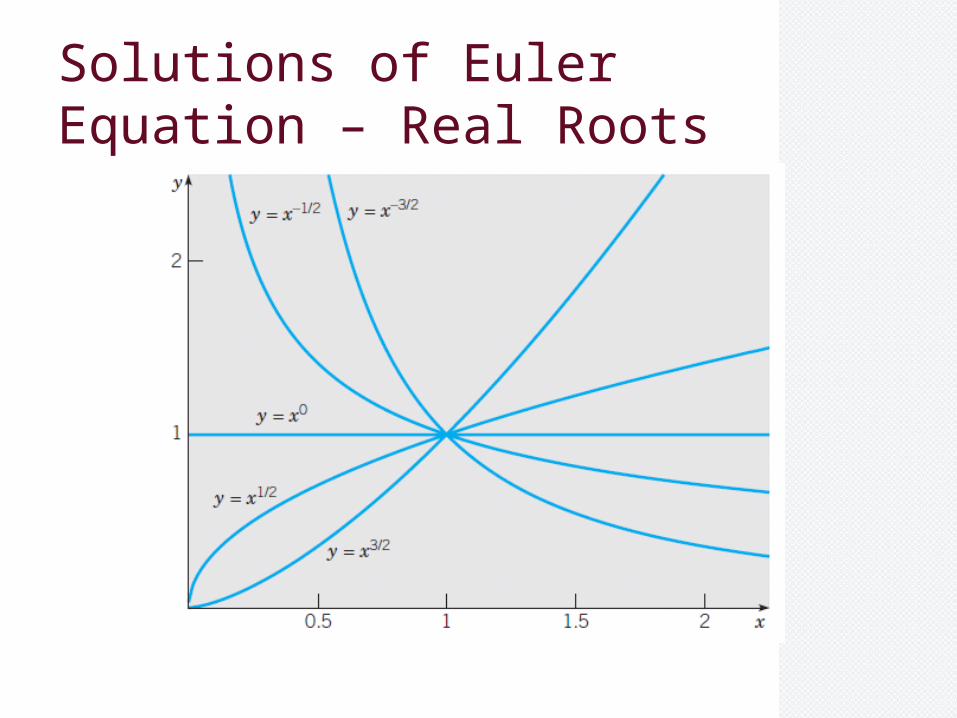
Solutions of Euler Equation – Real Roots
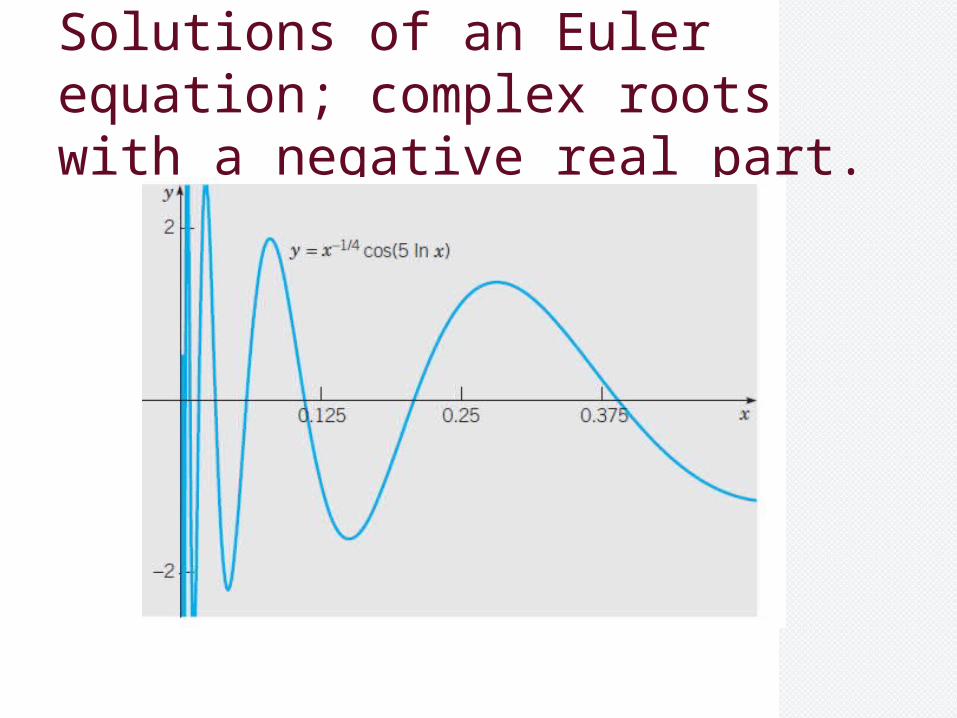
Solutions of an Euler equation; complex roots with a negative real part.
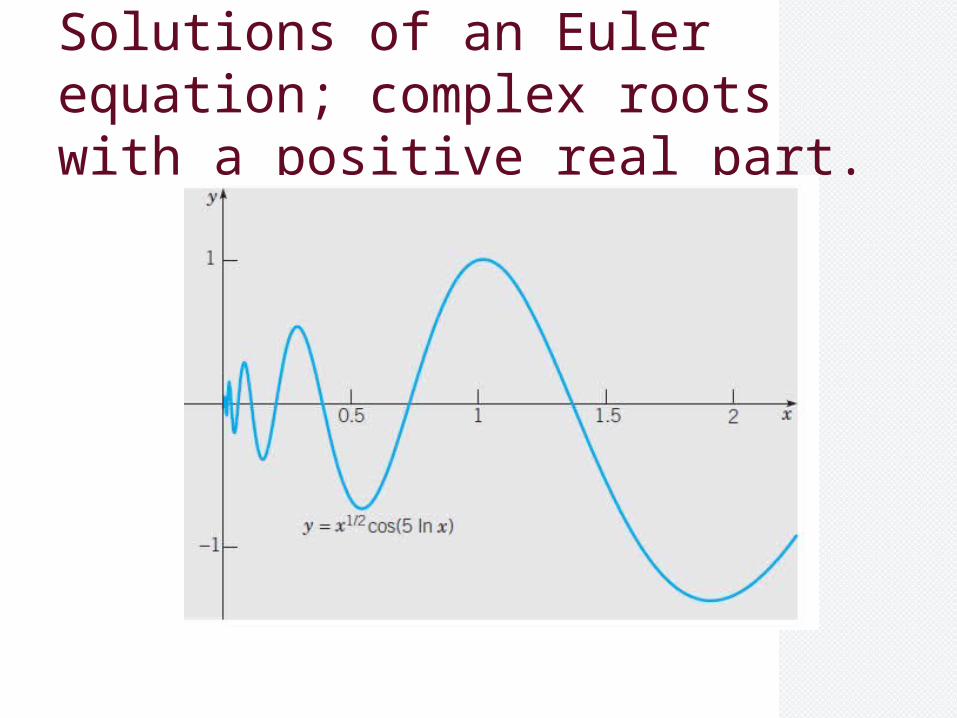
Solutions of an Euler equation; complex roots with a positive real part.
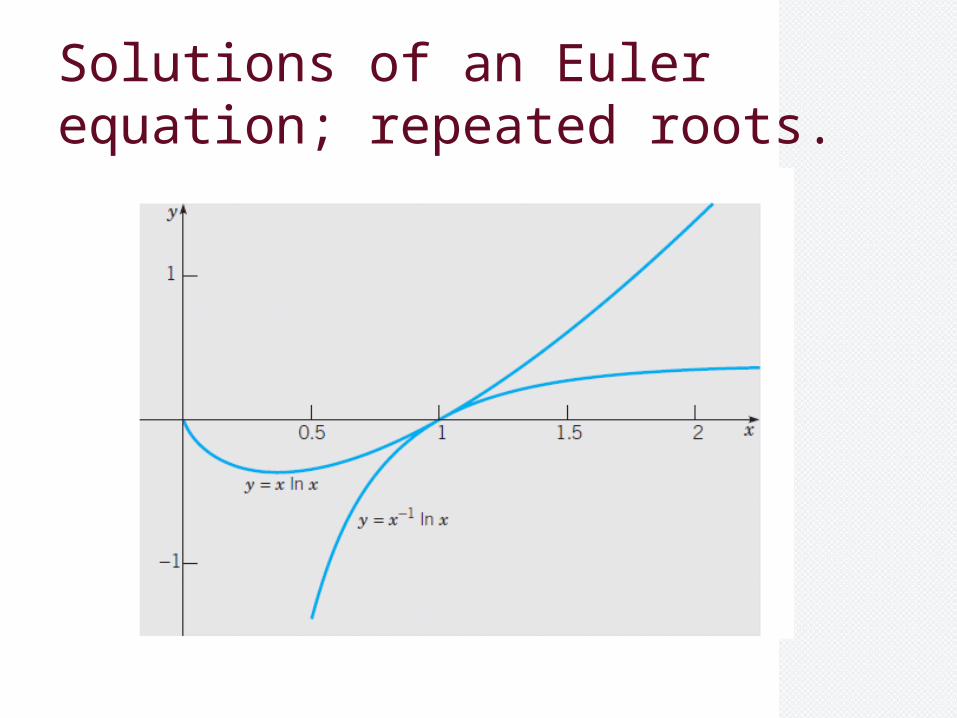
Solutions of an Euler equation; repeated roots.
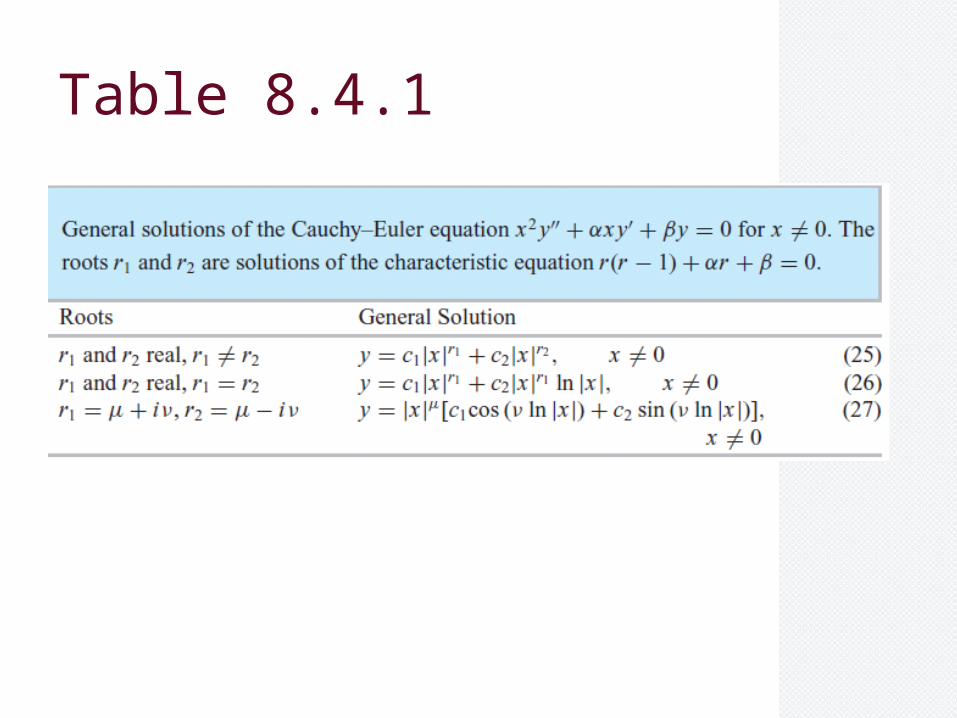
Table 8.4.1
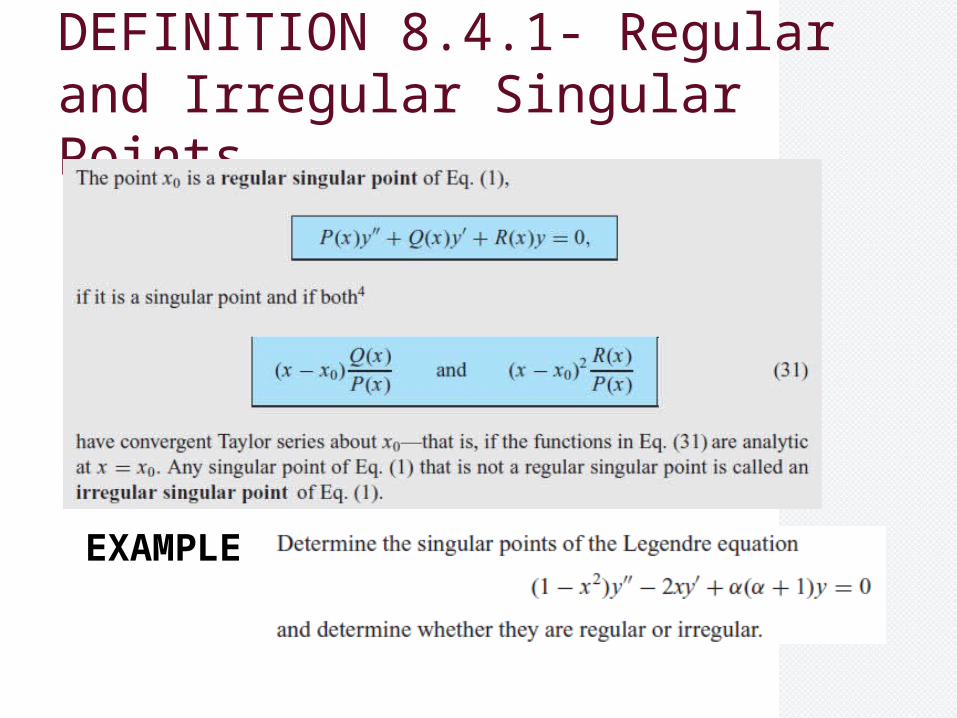
DEFINITION 8.4.1- Regular and Irregular Singular Points
EXAMPLE





























