Embed Size (px)
Citation preview

Digital Hardware-/Softwaresystems Specification
Seminar Architecture & Design Methods for Embedded Systems
Summer Term 2006
University of Stuttgart
Faculty of Computer Science, Electrical Engineering and Information Technology
Author: Timo Blon
2176039
Advisor: Prof. Dr. Martin Radetzki
Institut für Technische Informatik

Contents
Contents
Contents ............................................................................................................................................................................ 1
1 Introduction .................................................................................................................................................................... 2
1.1 Design of Embedded Systems ............................................................................................................................... 2
1.2 Y-Chart ................................................................................................................................................................... 2
1.2.1 Abstraction hierarchy ....................................................................................................................................... 3
1.2.2 Specification domains and design flow ............................................................................................................ 4
2 System Synthesis ............................................................................................................................................................ 5
2.1 Synthesis .................................................................................................................................................................. 5
2.2 System specification ............................................................................................................................................... 6
2.2.1 Problem specification - Problem graph ............................................................................................................ 7
2.2.2 Specification of target architecture - Architecture graph ................................................................................. 8
2.2.3 Specification of mappings - Specification graph .............................................................................................. 9
2.3 Implementation ...................................................................................................................................................... 9
2.3.1 Allocation and binding ..................................................................................................................................... 9
2.3.2 Scheduling ...................................................................................................................................................... 11
2.3.3 Valid implementation ..................................................................................................................................... 12
2.4 System optimization ............................................................................................................................................. 13
2.4.1 Cost functions ................................................................................................................................................. 13
2.4.2 Refinement of cost model ............................................................................................................................... 14
3 Summary ....................................................................................................................................................................... 16
Figures ............................................................................................................................................................................ 17
References ...................................................................................................................................................................... 18
T.Blon 1

Introduction
1 Introduction
1.1 Design of Embedded Systems
The fast increasing performance of VLSI-Technology (Very Large Scale Integration) and
increasing customer requirements lead to highly complex real-time embedded systems. To handle
this complexity for being successful in a price led global market the use and development of
intelligent computer-aided design (CAD) tools gets more and more important. „Only efficient
tools and reuse can bring design productivity up to the expected level“ [2] to overcome the tight
time-to-market constraints. Another important issue is the verification of such highly complex
distributed systems during the complete development process.
To meet these challenges system-level designs are necessary to raise the level of abstraction.
Based on an abstract system specification CAD tools are used for step-wise refinement until the
final implementation of the system.
1.2 Y-Chart
To give an overview about the different levels of abstraction and to illustrate their interrelation to
the different specification domains, the Y-Chart proposed by Gajeski is commonly used. The
specification domains (behavioural, structural and physical) are diagrammed as three axes and the
different levels of abstraction are represented through the distance to the centre of the chart. With
increasing distance from the origin, the abstraction level, indicated as concentric circles, increases
from the circuit level, over logic level, register transfer (RT) level and the arithmetic level up to
the system level [2] [4].
T.Blon 2

Introduction
1.2.1 Abstraction hierarchy
A behavioural specification at system level has a granularity of interacting tasks and processes, as
well as corresponding design constraints. The structural description at system level defines the
system architecture with its hard- and software parts represented through processors, application
specific integrated circuits (ASIC), communication channels and memories which are finally mapped
to specific hardware devices in physical domain, e.g. processors, chips and boards.
The algorithmic description at the next level is given by a specific instruction set and data formats,
e.g. VHDL-description. The structure at the arithmetic level is represented as a controller, divided
into a control part and a data path which is physically represented in a floor plan.
The behaviour at register-transfer (RT) level is normally specified through states and transitions
between these states. Common notations are flow-tables or hardware description languages. The
structural domain is represented as a sequence chart with decoders and multiplexers which are
implemented as macro cells in physical domain.
As the name logic level already says, this level is characterized by boolean functions like boolean
equations or Karnaugh-diagrams that lead to combinational circuits.
The lowest level of abstraction specifies switching functions which are transferred to circuits that
are finally implemented as a transistor layout. This level is also called transistor level [3].
T.Blon 3
Figure 1: Y-Chart [2]

Introduction
1.2.2 Specification domains and design flow
The Y-Chart also allows illustrating the relation between different design activities as paths on the
chart as illustrated in Figure 1. A complete system design normally starts with describing the
functionality at system level and ends after stepwise refinement and mapping onto structural and
physical domain with the implementation on circuit level.
The synthesis, as transformation of a specification in behavioural domain to a representation in the
structural domain (at the same level of abstraction), is represented as an arc in the Y-chart. Where
the behavioural specification emphasis on input-output functionality without favouring a particular
way of implementation, the resulting structural description already represents an interconnection
of abstract components. These components are separately analysed and used to specify the
functionality at the next lower abstraction level. Based on these functional descriptions the next
synthesis step can be performed [4].
The final step of this classical top-down synthesis approach is the generation of the physical layout
out of the structural specification. This specification focuses on the physical characteristics and
the placement in space without considering further functional aspects.
To reach the required performance, optimization is necessary during the complete development
process. It can be represented at any point in the chart as an arrow that points back to its starting
point. This representation describes that this task results in improved specifications and does not
generate completely new specifications.
T.Blon 4
Figure 2: Y-Chart and design activities

System Synthesis
2 System Synthesis
2.1 Synthesis
After the overview of different abstraction levels we will take a closer look at system-level
synthesis. As already mentioned systems developers try to focus on that high abstraction level to
handle the complexity and reduce development times.
In contrast to high-level synthesis, “which deals with the implementation of algorithms in
application-specific hardware (ASIC design), system-level design focuses on the problem of
mapping an abstract specification model of an entire system onto a target architecture. As
mentioned earlier, a typical target architecture consists of a set of processor cores, memories,
peripheral units, and custom hardware blocks. These system components are interconnected by on-
chip busses whose implementation is part of system-level design as well.“ [4, p.20]
There are several tasks that have to be performed in order to come from a system specification to
the final implementation. At first the decision of which system components should be used has to
be made (allocation). The next important issue is the assignment of functionalities to the selected
components (binding). Depending on various constraints like performance and costs, this step
especially includes the decomposition into hardware and software components (HW/SW co
design). Therefore the system specification describing the functionality and behaviour of a system
should be independent of the implementation without favouring a hardware or a software
realization. Further details about advantages of each realization will be discussed later. After this
partitioning of the system into hardware and software parts, the scheduling has to be worked out.
This addresses the real-time requirements for the system under different optimization criteria (e.g.
costs or power consumption).
It is obvious that there is a large set of possible solution at this synthesis level. Therefore methods
for early cost and performance estimation are very important to find the best fitting design. At one
side there is the possibility to use libraries with optimized latency and known resource
consumption for estimation and composition of the architecture. This approach is mainly used for
data flow oriented systems. It allows the reuse of pre-designed, well-tested components to shorten
development time. This important issue is often referred to as Intellectual Property (IP). For
control flow dominated systems rapid prototyping methods and stepwise improvement are very
important for estimation and performance evaluation [1, p.368].
T.Blon 5

System Synthesis
Functional validation should also be done at this high abstraction level through formal verification
or simulation. This allows finding errors very early in the development process to avoid much
rework and thus leads to high productivity.
After determination of the system architecture and the decomposition into hardware and software
components the communication synthesis must be performed. “This includes the selection of
communication protocols for the selected buses, hardware interface synthesis and software driver
generation.” [4, p.29] To get to the final implementation the components are separately
synthesized.
2.2 System specification
The specification of a system synthesis problem can be divided into three parts:
– Description of functional elements and possible system architectures with directed graphs
(problem and architecture graph)
– The possible mapping of a functional element (behaviour/tasks) to various architecture
components is described with a specification graph. This includes assessment of additional
constraints and attributes related to all kind of assignments.
– Finally the implementation has to be performed. Based on the given requirements, this
includes selection of the final architecture and mapping the functionality to the allocated
system components (allocation, binding, scheduling).
T.Blon 6
Figure 3: System Synthesis [2]

System Synthesis
2.2.1 Problem specification - Problem graph
A problem graph as described by J. Teich is derived from a data flow graph by adding
communication nodes between the functional nodes. Thus a problem graph GP V P , E P is a set
of functional and communication nodes V P connected through directed edges E P which
represent the data dependencies. The functional nodes e.g represent tasks, processes or procedures
[1]. This is the reason why this kind of problem specification is also named task graph as described
in [5]. Figure 4 illustrates a data flow graph and the derived problem graph with additional
communication nodes 6, 7, 8, 9. Modelling the communication nodes allows taking into account
that there are different requirements for the interconnection between the functional nodes (e.g.
latency, throughput).
Although many systems are described in the programming language C, this type of system
specification is often used as input for system-level synthesis tools. There are attempts to develop
automatic task graph generation tools because the manual transformation of the system
specification from C to task graphs is very time consuming and error-prone. One example is the
task graph extraction tool presented in [5].
Figure 4 could for example represent a rough concept of an adaptive cruise control system (ACC).
An ACC system is an advanced type of speed control system in automotive industries. It allows
setting a target vehicle speed and in addition a distance to a vehicle ahead. If the vehicle in front of
the ACC controlled vehicle is slower, the distance is controlled by reducing engine torque or if
necessary by braking. If no vehicle is detected ahead vehicle speed is kept at the desired target
value. To detect objects in front of the car mostly radar sensors are used. The nodes of the problem
graph could correspond to the following functionality:
1. Evaluation of radar sensor input; e.g. analog digital conversion (ADC)
T.Blon 7
Figure 4: Data flow graph and derived problem graph with communication nodes

System Synthesis
2. Processing of radar sensor information to detect objects and determine distance and
differential speed; processing this information requires the use of math intensive signal
processing algorithms within real-time (e.g. fast Fourier transformation (FFT))
3. Evaluation of current vehicle speed out of wheel rotational sensors; the vehicle speed
signal could e.g. be provided as a pulse signal
4. Controller to keep the distance and speed at desired values; calculation and coordination of
control variables for vehicle speed adjustment; also consider possible shut off conditions to
avoid malfunction (if vehicle speed sensor is defect there is no secure operation possible)
5. Output the resulting variables e.g. send information to brake and engine control unit (ECU)
for torque adjustment
2.2.2 Specification of target architecture - Architecture graph
The architecture model consisting of the allocateable resources and their interrelation is
represented in an architecture graph GAV A , E A . The set of nodes V A is given by the
allocateable resources, i.e. functional components like arithmetic units, general purpose
processors, FPGAs or ASICs and communication resources like shared buses or point-to-point
connections. The set of edges E A is defined as directed connections between these resources [1].
The basic idea is to show the set of available resources that could be used for implementing the
system. The target architecture illustrated in Figure 5 consists of three functional resources (RISC,
hardware module HWM and a digital signal processor DSP) and two bus resources (shared bus,
point-to-point bus). The derived architecture graph shows that the point-to-point connection
v BR 2 just allows sending data from v HWM to v DSP . On the other hand, the shared bus is
modelled as a bidirectional connection v BR 1 between the bus subscribers v RISC , v HWM and
v DSP .
T.Blon 8
Figure 5: Target architecture and derived architecture graph

System Synthesis
As a higher abstraction level a chip graph GC V C , EC could be defined to show the assignment
of hardware modules to chips. This is especially important when considering constraints like
power consumption or required space for implementation of the hardware module [1].
2.2.3 Specification of mappings - Specification graph
In order to find an implementation, we need to set up a correlation between the problem graph and
the specified architecture graph. Therefore we map the functional nodes of the problem graph to
the functional resources of the architecture graph and likewise the communication nodes to the
corresponding bus resources. The resulting specification graph can formally be defined as a graph
GS V S , E S , consisting of D graphs Gi V i , E i for i jD and an additional set of
mapping edges EM with V S= ∪i=1
D
V i , ES= ∪i=1
D
E i ∪ EM and EM= ∪i=1
D�1
EMi ,
Emi⊆V i×V i1 ∀ 1iD [1].
Figure 6 illustrates the concept of a specification graph: The nodes of the problem graph GP are
mapped ( EM1 ) to the nodes of the architecture graph GA and the edges EM2 represent the
mapping of the architecture nodes to the corresponding nodes of the chip graph GC .
This graph includes the information about all possible combinations for mapping the
functionalities to corresponding system components. Selection of one concrete mapping by
activating nodes and edges of the specification graph, leads to a possible implementation.
2.3 Implementation
2.3.1 Allocation and binding
The described activation is formally defined as a function a :V S∪E S{0,1} , that assigns every
edge e∈ES and every node v∈V S the value activated 1 or not activated 0 [1].
With this definition of activation the major steps allocation and binding can be defined as follows:
An allocation α is the subset of all activated nodes and edges of the specification graph:
α=αV∪αE
αV={v∈V S ∣a v =1}
αE= ∪i=1
D
{e∈E i ∣ ae=1}
And a binding β is defined as the subset of all activated mappings:
T.Blon 9
System Synthesis
β={e∈E m∣ a e=1}
A binding β is valid if each activated mapping e∈β binds an activated node (e.g from
problem graph) to exactly one allocated node (e.g. of the architecture graph). Furthermore the
communication between the functional nodes has to be ensured by appropriate mapping of the
communication nodes. If there exits at least one valid binding for an allocation α , this allocation
is also defined as valid.
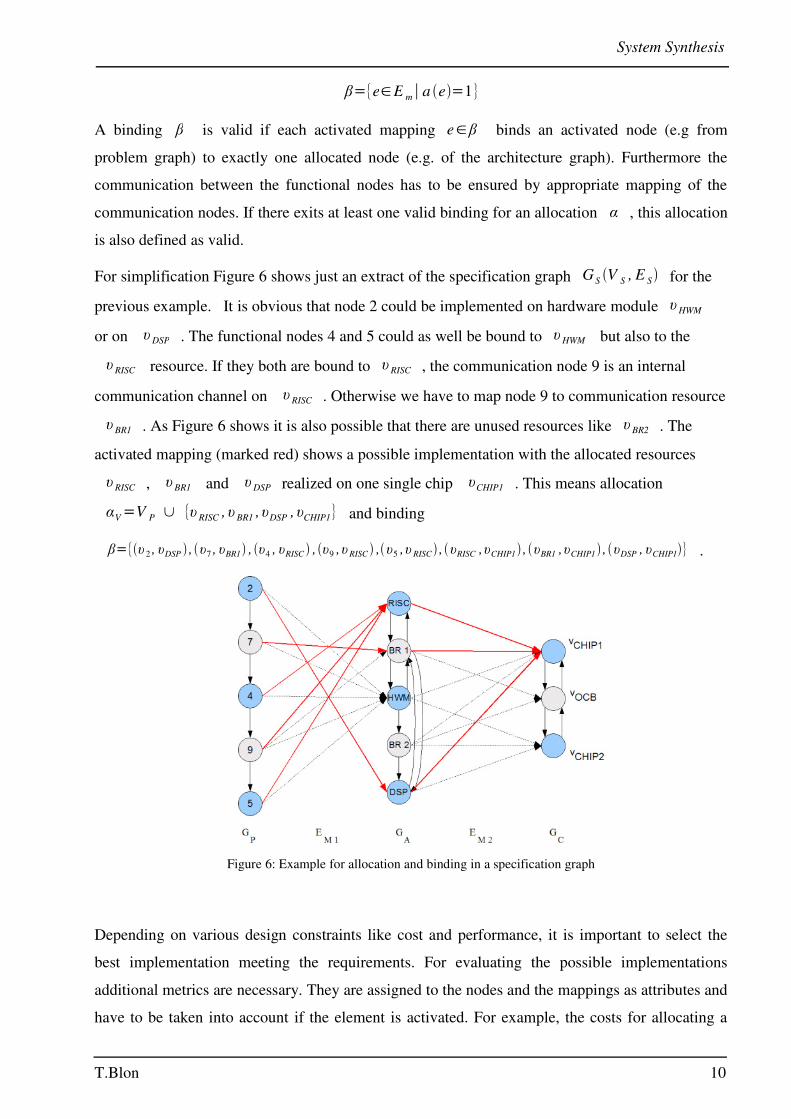
For simplification Figure 6 shows just an extract of the specification graph GS V S , E S for the
previous example. It is obvious that node 2 could be implemented on hardware module υHWM
or on υDSP . The functional nodes 4 and 5 could as well be bound to υHWM but also to the
υRISC resource. If they both are bound to υRISC , the communication node 9 is an internal
communication channel on υRISC . Otherwise we have to map node 9 to communication resource
υBR1 . As Figure 6 shows it is also possible that there are unused resources like υBR2 . The
activated mapping (marked red) shows a possible implementation with the allocated resources
υRISC , υBR1 and υDSP realized on one single chip υCHIP1 . This means allocation
αV=V P ∪ {υRISC ,υBR1 ,υDSP ,υCHIP1} and binding
β={υ 2 , υDSP ,υ7 , υBR1 , υ4 , υRISC ,υ9 ,υRISC ,υ5 ,υRISC ,υRISC ,υCHIP1 ,υBR1 ,υCHIP1 ,υDSP , υCHIP1} .
Depending on various design constraints like cost and performance, it is important to select the
best implementation meeting the requirements. For evaluating the possible implementations
additional metrics are necessary. They are assigned to the nodes and the mappings as attributes and
have to be taken into account if the element is activated. For example, the costs for allocating a
T.Blon 10
Figure 6: Example for allocation and binding in a specification graph

System Synthesis
specific functional component in general (attribute of node) or the costs occurring if binding a
functionality to that functional component (attribute of edge) can be expressed. Further measures
could be the required space, the latency or the memory usage if implementing a functionality on a
particular component. These optimization issues will be addressed later.
2.3.2 Scheduling
Based on the selected architecture, the scheduling has to be determined. Therefore the execution
time of a task υ is specified as an attribute delay υ , β ∈ ℤ in the specification graph.
The execution time is in general dependent on the binding e.g. a hardware implementation on an
ASIC has a higher performance than the equivalent, more flexible software solution. Looking at
the communication nodes, the execution time is interpreted as the transmission latency.
A scheduling is formally defined as a function τ : V Pℤ0
that fulfils for every edge
e=υi ,υ j the following condition:
τ υ j τ υidelayυ j , β
Thereby τ υi can be considered as the activation time of node υi∈V P and an edge
e=υi ,υ j can be considered as the directed edge from node υi to node υ j . It is assumed
that a specification GS , that contains a problem graph GP , a valid binding β and a function
delay υ , β , is given [1]. The important point is that now the data dependency, specified in the
data flow graph, is taken into account again. The above condition expresses that a task υ j that is
somehow dependent from another task υi can first be executed if this task υi has been
activated and finished. Beside this definition there are often additional constraints like deadlines or
resource constraints which have to be considered.
Based on the information given in Figure 7, the scheduling can be determined. For example, the
execution time of υ4 on the RISC processor is delay υ4 ,υ4 ,υRISC =14 . Binding the same
task to the hardware module the execution time could be reduced to delay υ4 ,υ4 ,υHWM =8 .
The internal communication on a functional component is assumed to not generate any latency e.g.
delay υ9 , υ9 ,υRISC =0 .
T.Blon 11

System Synthesis
2.3.3 Valid implementation
Based on a given specification G S a valid implementation is defined as a triple α , β , τ ,
with a valid allocation α , a valid binding β and a scheduling τ [1, p.378].
The implementation from Figure 7 can also be illustrated with the Gantt-Chart in Figure 8. At first
υ2 is executed on υDSP . After transmitting data over υBR1 the tasks υ4 and υ5 are
executed on the RISC processor υRISC . Because of using different resources, it is obvious that
pipelining could be introduced for this example. For continuous computation and reduction of idle
times, task υ2 could be immediately reactivated after finishing the previous calculation.
Likewise the other tasks could be scheduled.
T.Blon 12
Figure 7: Example of a valid implementation (allocation - binding - scheduling)
Figure 8: Allocation, binding and scheduling for discussed implementation

System Synthesis
This very simple example should be sufficient to explain the principles of the concept. In more
complex implementations there could also be concurrent tasks and many data dependencies which
have to be addressed.
2.4 System optimization
The introduced specification model establishes a basis for system synthesis. As already discussed
there are many alternative implementations and a lot of additional constraints which have to be
considered. Even if these additional constraints make the system design difficult, they are very
helpful during the selection process because of reducing the number of feasible solutions [1].
2.4.1 Cost functions
The feasible solutions are defined as a set A of valid implementations α , β , τ . Selecting the
optimal solution can be expressed by minimizing the value of a cost function:
ƒα , β , τ : Aℝ with g i α , β , τ 0 , ∀ i∈{1,... , q}
The functions g i α , β , τ as part of the optimization problem represent additional constraints
to restrict the search space A .
Minimizing the latency of a system as specified above could for example be described with the
cost function (also called objective function) ƒα , β , τ =max {τ υ delay υ , β ∣ υ∈V P} .
An additional cost limit c is given by the constraint g1α , β , τ =c�∑υ∈α
c υ where c υ
represents the costs for realization of an allocated component [1].
This example refers to a very important point: the task of HW/SW partitioning is always to trade
off an inexpensive and flexible software solution versus a high performance hardware
implementation. The optimal solution of a cost functions always depends on the optimization
criteria. Taking the quantity for mass production into account, a hardware solution could also lead
to lower overall costs because the development costs are negligible. If just the HW/SW
partitioning problem is important, a simplified model with just one hardware component and one
software node (processor) connected via a shared bus resource is necessary. Then every functional
component of the problem graph can theoretically be mapped to these two resources. The specified
execution times, resource constraints and costs can be evaluated more easily, because there is just
the decision between a hardware or a software realization.
T.Blon 13

System Synthesis
The previous example points at the idea of cost functions. A more general approach for taking
different metrics into account (e.g. costs c , latency L , power consumption P or things
like chip area, memory usage and testability) is to define a cost function:
ƒ=c1⋅hc ,cc2⋅h L ,Lc3⋅hP , P...
The coefficients c i are used to assess the different criteria specified by functions h . Because
the criteria are referring to limit values (e.g. c or L ) the optimal value of a function h is 0
and exactly meeting the limit value results in h=1 .
Figure 9 illustrates the application of a cost function with three different implementations. At the
left-hand side the three possible implementations are evaluated under the criteria latency, costs,
power consumption and testability. The Kiviat-graph shows that implementation 1 fulfils all
criteria while implementation 2 exceeds the costs and implementation 3 exceeds the limit values
for the costs and the power consumption. The results of the complete cost function are shown in
the right diagram. If the most important optimization criteria are latency L and power
consumption P , implementation 2 is the first choice. If the costs are the main optimization
criterion, implementation 1 is the only feasible solution.
2.4.2 Refinement of cost model
We have already addressed a simple model for cost evaluation. This model leads to rather
pessimistic estimations because the costs were only dependent on the binding of each functional
module itself. It does not take into consideration that the binding of other functionalities could
influence the implementation cost of a functional module. Probably there could be shared
resources or other synergy effects that reduce the total costs.
T.Blon 14
Figure 9: Cost function - evaluating implementations with different optimization criteria

System Synthesis
[1] introduces a more detailed model that also takes the chip area and memory allocation into
account. Therefore the costs are divided into basic costs and additional costs:
The basic costs cb υ originating from allocation of a resource υ∈V A are specified by a
function cb:V Aℤ0
.
If further nodes υ∈V P are bound to an allocated resource υ∈V A additional costs
ca : EM ℤ0
must be considered. These additional costs originate from the memory or chip
area needed by the node, so they are dependent on the mapping e=υ , υ ∈ EM .
For mapping similar functionalities to the same resource υ∈V A the defined additional costs
could be too high because some parts of the resource can be reused (e.g. memory or an arithmetic
unit of a hardware module). The additional costs ca are replaced by type specific additional
costs c t . Therefore the nodes υ∈V P are classified into functional types T i∈T . The
additional costs for binding several nodes of the same functional type T i to one resource
υ∈V A are defined as: c tT i , υ=max {cae ∣ e=υ , υ∈ β ∧ υ∈T i} [1]
Based on these definitions more accurate cost modelling for an implementation is possible. The
overall costs are summed up to: c α , β = ∑υ∈α∩V
A
ch υ , β
The cost for an allocated resource υ are defined as : ch υ , β =cb υ ∑T
i∈T :υ , υ∈β∧ υ∈T
i
ct T i , υ
T.Blon 15

Summary
3 Summary
In this paper I have described the necessity of high abstraction levels to handle the complexity of
todays embedded systems and to overcome the tough market constraints. I outlined the different
levels of abstraction and the tasks during the development process with the Y-Chart. After that, the
system level synthesis was described in detail. Therefor an formal model for system specification
based on directed graphs was presented. Beginning with the problem specification modelled with a
problem graph and defining the target architecture with an architecture graph and a chip graph, the
resulting specification graph was depicted. This formal model allows reducing design time and
enables the use of synthesis techniques to enlarge the space of feasible solutions to a given
problem.
The main activities during the synthesis process were described in detail. The allocation of system
components and the binding of the tasks to these resources were formally defined according to [1].
The scheduling aspects were described with a small example and some basics of HW/SW
partitioning were given. Finally the system optimization was addressed. As a major aspect, cost
functions were introduced because this concept is applicable for nearly every optimization criteria.
Some examples for evaluating possible implementations like execution time, resource usage and
costs were pointed out. I think this is the important part of the system-level synthesis based on
formal models because they allow assessing the system from different perspectives and also
optimizing it under different criteria. Thus it makes early estimations in the design process
possible.
I think the system synthesis approach is the right way to meet future requirements. Nevertheless I
think that there is still a lot of work to do because there is no standardized format for system
specification and the market of CAD tools supporting system-level synthesis is somewhat
intransparent.
T.Blon 16

Figures
Figures
Figure 1: Y-Chart [2]..........................................................................................................................3
Figure 2: Y-Chart and design activities..............................................................................................4
Figure 3: System Synthesis [2]...........................................................................................................6
Figure 4: Data flow graph and derived problem graph with communication nodes..........................7
Figure 5: Target architecture and derived architecture graph.............................................................8
Figure 6: Example for allocation and binding in a specification graph............................................10
Figure 7: Example of a valid implementation (allocation - binding - scheduling)...........................12
Figure 8: Allocation, binding and scheduling for discussed implementation..................................12
Figure 9: Cost function - evaluating implementations with different optimization criteria.............14
T.Blon 17

References
References
[1] J. Teich: Digitale Hardware/Software-Systeme. Berlin - Heidelberg: Springer-
Verlag 1997. ISBN 3-540-62433-3. pp. 367-389
[2] P. Eles, Z. Peng: System Synthesis of Digital Systems. Lecture Notes. University of
Linköping 2000. http://www.ida.liu.se/~petel/SysSyn/ (05/2006)
[3] U. G. Baitinger: Hardware/Software Co-Design. Lecture Notes. Stuttgart University
2001. http://www.infotech.uni-stuttgart.de/pdf/L_HSCD.pdf (05/2006)
[4] R. Dömer: System-level Modelling and Design with the SpecC Language.
Dissertation. University of Dortmund 2000
[5] K. S. Vallerio, N. K. Jha: Task Graph Extraction for Embedded System Synthesis.
Proc. 16th International Conference on VLSI Design 2003
T.Blon 18