Embed Size (px)
Citation preview

Dimensioning of Metallic
Connections per EC3
Manual of Analysis
and verification examples
Analysis reference and verification
Version 1.0 April 2017

COPYRIGHT
The software “PRAXIS” as well as all manuals pertaining thereof are
intellectual property of 3DR Engineering Software Ltd. The use of
software without permission; or the republication of manuals in any
form, without the written authorization of 3DR Engineering Software
Ltd is strictly prohibited and shall be legally penalized.
For further information and copies of this manual, please contact
Messrs:
3DR Engineering Software Kifisias Ave. 340 15233, Chalandri Tel.: +30 210 6838011 Fax: +30 211 7702198 email: [email protected] www.3dr.eu

DECLARATION OF LIABILITY
LONG TIME, EFFORTS AND COSTS HAVE BEEN SPENT FOR THE DEVELOPMENT AND DOCUMENTATION OF "ADAPTORSTEEL". THE PROGRAM HAS BEEN THOROUGHLY CHECKED AND ADEQUATELY UTILIZED. HOWEVER, WHEN UTILIZING THE PROGRAM, THE USER ACCEPTS AND APPRECIATES THAT NO WARRANTY WHATSOEVER IS PROVIDED BY THE PROGRAM AUTHORS AND DEALERS AS REGARDS THE ACCURACY AND RELIABILITY THEREOF.
THIS PROGRAM CONSTITUTES A MOST PRACTICAL TOOL FOR THE ANALYSIS, DIMENSIONING / CONTROL OF THE STRUCTURAL DATA OF EACH SIMULATION. YET, THE USERS SHOULD CAREFULLY READ THE RELEVANT MANUALS, THE TECHNICAL INSTRUCTIONS AS WELL AS THE EXAMPLES FOR CHECKING THE CORRECTNESS OF RESULTS; AND THEY SHOULD FURTHER KNOW THE PROCESS FOR ALGORITHM EXECUTION AND THE ASSUMPTIONS OF THE PROGRAM, AS THESE ARE DESCRIBED IN THE ACCOMPANYING DOCUMENTS OF PROGRAM DOCUMENTATION.
THE USERS SHOULD VERIFY THE PROGRAM RESULTS BY THEMSELVES, WHEREAS THE RESPONSIBILITY FOR SUCH RESULTS SHALL BE BORNE BY THE UNDERSIGNED DESIGNER – ENGINEER ONLY AND IN NO EVENT BY THE 3DR ENGINEERING SOFTWARE LTD AND ITS DEALERS.

Contents
1. Basic Calculation principles...................................................... 1 1.1. Force distribution on connecting means 1.1.1. Transfer of torque coplanar to bolting on bolts 1.1.1.1. Free centre of rotation 1.1.1.2. Forced centre of rotation 1.2. Calculation of fillet weld strength 1.3. Impact of plate deformability in bolted connections 1.3.1. Failure of strut footing 1.3.1.1. Welding connection 1.3.1.2. Bolted connection 2. Connection of strut beam bolted on the beam body............. 29 2.1. Description of mechanical behavior 2.1.1. Transfer of stress through the connection means 2.1.2. Potential connection failure mechanisms 2.1.3. Additional check for hollow rectangular strut cross-section. 2.1.4. Classification of connection 2.2. Detailed calculation of connection 2.2.1. Clearance check 2.2.1.1. Bolt Clearances 2.2.1.2. Welding thickness check 2.2.1.3. Beam height adequacy check 2.2.2. Finding the maximum bolt shearing force 2.2.3. Bolting shearing strength 2.2.4. Strength under intrados compression 2.2.5. Tearing strength of connection beam segment

2.2.6. Tearing strength of connection plate segment 2.2.7. Welding check 2.2.8. Strength against front failure of hollow strut footing
2.2.8.1 Connecting plate tensile strength
2.2.8.2. Check 3. Strut beam connection with double angular plates .............. 43 3.1. Description of mechanical behavior 3.1.1. Transfer of stress through the connection means 3.1.2. Critical connection failure mechanisms 3.1.3. Classification of connection 3.2.
Detailed calculation of connection
3.2.1. Clearance check 3.2.1.1. Bolt clearance check 3.2.1.2. Angular plate height adequacy check 3.2.2. Shearing strength of a bolt 3.2.3. Strut bolt check under shearing 3.2.4. Strut bolt check under intrados compression 3.2.5. Beam bolt check under shearing 3.2.6. Beam bolt failure under intrados compression 3.2.7. Check of angular plates under shearing 3.2.8. Check of angular plates under bending 3.2.9. Beam section tearing strength 3.2.10. Tearing strength of an angular plate leg section on a beam 3.2.11. Tearing strength of an angular plate leg section on a prop 3.2.12 Case of welding on beam connection 4. Beam on Beam connection with double angular plates ....... 62 4.1. Description of mechanical behavior 4.1.1. Transfer of stress through the connection means 4.1.2. Critical connection failure mechanisms 4.1.3. Classification of connection 4.2.
Detailed calculation of connection
Contents

4.2.1. Clearance check 4.2.1.1. Bolt Clearances 4.2.1.2. Beam height adequacy check 4.2.2. Shearing strength of a bolt 4.2.3. Main beam bolt check under shearing 4.2.4. Main beam bolt check under intrados compression 4.2.5. Secondary beam bolt check under shearing 4.2.6. Secondary beam bolt check under intrados compression 4.2.7. Check of angular plates under shearing 4.2.8. Check of angular plates under bending 4.2.9. Secondary beam section tearing strength 4.2.10. Tearing strength of an angular plate leg section
on a secondary beam
4.2.11. Tearing strength of an angular plate leg section
on main beam 5. Continuity restoration of a beam subjected to bending
and tensile stress with beam with body-foot plates............. 76 5.1. Description of mechanical behavior 5.1.1. Transfer of stress through the connection means 5.1.1.1. Transfer of bending moment 5.1.1.2. Transfer of pivotal force 5.1.1.3. Transfer of shearing force 5.1.2. Bolting stressing 5.1.3. Case of member with welded connections 5.1.3.1. Body plate 5.1.3.2. Footing plate 5.1.4. Plate stressing 5.1.5. Member cross-section stressing 5.1.6. Checks carried out 5.2. Detailed connection
calculation 5.2.1. Clearance check 5.2.1.1. Bolt clearance check 5.2.1.2. Beam height adequacy check
Contents

5.2.2. Beam cross-section checks at the restoration point 5.2.2.1. Complete cross-section check 5.2.2.2. Decreased cross-section check at the restoration point 5.2.2.2.1. Bending strength check 5.2.2.2.2. Shearing force strength check 5.2.3. Bolt check 5.2.3.1. Footing bolt check 5.2.3.1.1. Bolt strength under footing shearing 5.2.3.1.2. Bolt group strength under intrados
compression 5.2.3.2. Body bolt check
5.2.3.2.1. Bolt strength under footing shearing 5.2.3.2.2. Bolt group strength under intrados
compression 5.2.4. Footing and body plate check
5.2.4.1. Footing plate check under pivotal force
5.2.4.2. Body plate check under axial force.
6. Strut beam connection with front slabs ................................. 96 6.1. Description of mechanical behavior
6.1.1. General
6.1.2. The logic of semi-rigid connections and the necessity of
ductile behavior 6.1.3. Classification of torque-transferring connections 6.1.4. Deformation capacity 6.1.5. Aiming at ductile behavior 6.1.6. The component method in general 6.1.6.1. Transfer of forces to the connection 6.1.6.2. Calculation of initial connection rigidity 6.1.6.3. Required rotating ability 6.1.7. The logic of equivalent short-T
6.1.7.1 Multiple bolt rows
6.1.8. Formation of short-Ts on front slab 6.1.9. Transfer of tensioning forces
Contents

6.1.9.1. Feasibility of reinforcing strut footing 6.1.9.1.1. Reinforcement by transverse reinforcement plates 6.1.9.1.2. Reinforcing by backing plates 6.1.10. Transfer of compressive forces 6.1.11. Transfer of shearing forces 6.1.11.1. Bolt shearing forces 6.2. Detailed calculation of connection 6.2.1. Clearance check 6.2.1.1. Bolt clearance check 6.2.1.2. Check of strut body reinforcing plate clearances 6.2.1.3. Check of strut footing reinforcing plate clearances 6.2.1.4. Check of beam strut angle 6.2.1.5. Welding check 6.2.2. Initial calculations and assessment of general
connection parameters 6.2.2.1. Values of the parameter of transformation β 6.2.2.2. Strut shearing surface 6.2.2.3. Calculation of effective width of the strut body under
compression
6.2.2.4. Decreasing factor ω for the interaction of compression and
shearing 6.2.3. Solving the connection 6.2.3.1. Finding connection component rigidity coefficients 6.2.3.1.1. Preliminary assessment of the number of tensioned
bolt rows
6.2.3.1.2. Rigidity coefficients for the first tensioned bolt row. 6.2.3.1.3. Rigidity coefficients for the second tensioned bolt row. 6.2.3.1.4. Rigidity coefficients for the third tensioned bolt row.
Contents

6.2.3.1.5. Rigidity coefficients for the forth tensioned bolt row. 6.2.3.1.6. Calculation of the equivalent rigidity coefficient keq
6.2.3.1.7. Other connection rigidity coefficients 6.2.3.2. Finding the strengths of the basic connection components 6.2.3.2.1. Strut body under shearing 6.2.3.2.2. Strut body under compression 6.2.3.2.3. Beam body and footing under compression 6.2.3.3. Repetitive process for finding the number of tensioned rows 6.2.3.4. Connection classification
6.2.3.4.1. Finding the initial rigidity SiM
6.2.3.4.2. Classification according to rigidity 6.2.3.4.3. Classification according to strength
6.2.3.5. Check of connection rotating ability
6.2.3.6. Check of shearing force
6.3. Flow diagrams 6.3.1. Finding the initial rigidity Sj,ini
6.3.2. Finding strength torque
7. Prop support connection....................................................... 166 7.1. Description of mechanical behavior
7.1.1. General
7.1.2. Elastic resistance of the prop base 7.1.3. Resistance of prop base with low quality mortar
7.1.4. Comparison of the calculations of concrete strength according to EC2 and EC3
7.1.5. Accumulation of stresses under the prop base 7.1.6. Effective length of the short-T plate base 7.1.7. Slip coefficient between steel and concrete
Contents

7.1.8. Transfer of shearing forces through anchors 7.1.9. Transfer of shearing forces through friction and anchors 7.1.10. Bolt anchoring rules 7.1.10.1. Theoretical data 7.1.10.2. Check for bending of anchoring bodies 7.1.11. Impact of the biaxial nature of loading to the
connection analysis procedure according to EC3
7.1.12. Assumptions in order to eliminate the difficulties arising due
to the fact that EC3 does not provide instructions for biaxial loading 7.1.12.1. Strength of the tensioned side of the node 7.1.12.2. Strength of the compressed side of the node 7.1.12.3. Total connection strength 7.1.12.4. Necessity of employing interaction diagrams 7.1.12.5. Calculation of pivotal rigidity 7.2. Detailed connection calculation
7.2.1. Check of Distances 7.2.1.1. Check of anchor distances 7.2.1.2. Check of cement grout thickness 7.2.1.3. Check of weldings 7.2.2. Connection calculation 7.2.2.1. Finding the basic node parameters 7.2.2.2. Starting and ending points for neutral axis shift within
the cross-section
7.2.2.3. Solving for the neutral axis at a specific point
of the cross-section 7.2.2.3.1. Tensioned side of the node 7.2.2.3.1.1. Assessment of strength of each tensioned anchor 7.2.2.3.2. Compressed side of the node 7.2.2.3.3. Node strength 7.2.2.3.4. Pivotal rigidity of node 7.2.2.4. Check of anchoring on the foundation
Contents


Page 1
1
Basic Calculation principals
1.1. Force distribution on connecting means
1.1.1. Transfer of coplanar to bolting torque on bolts
In this chapter, we shall discuss the method employed to transfer a coplanar to a torque bolting in order to find the acting shearing force at the
most adverse bolt. One may discern two cases, depending on the “type” of
the bolting rotation pole. Presuming that this pole is located in the Gravity centre of the bolt cluster, it is called Free Centre of Rotation. In the opposite
case, where the centre of rotation would not coincide with the bolting centre, then such centre should called Forced Centre of Rotation. In the
following sections, each case shall be discussed separately:

Page 2
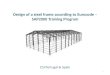
1.1.1.1. Free Centre of Rotation
Fig. 1.1. Cluster of bolts loaded by coplanar torque.
In the event of slight deformations to bolted plates, a linear relation
between the cutting force Ri, which is acting on bolt "i" and the
displacement of “δi” may be assumed, resulting to calculating the force of each bolt proportionately to the distance from the rotation centre and the bend θ as shown in the following graph:
Fig. 1.2. Determination of bolt forces

Page 3
The algebraic relations of determining such forces are as follows:
Since bolting is undergoing true bending, then the equilibrium
equations should be illustrated as follows:
From the two last relations it appears that the centre of rotation truly
coincides with the gravity centre of the bolting. Finally, the external torque
satisfies the relation:
where from it appears the shearing force to the most adverse bolt:
If an eccentric force would act on a bolt cluster, the following method could
be employed: The force R results from the flexural torque M=eF; whereas
F/n results from the eccentric force F (where the bolt number).

Page 4
Fig. 1.3 Determination of bolt forces on a free centre of rotation subject
to eccentric force.
As shown, the eccentric force F may be replaced by a flexural
torque M and a force of even direction on the centre of rotation. The bolt
forces result from superposition due to bending and shear. The resultant
force may be analyzed in components along the main axes:
In the previous sections, we assumed an elastic analysis for the
distribution of forces on the bolts. It is reminded that the tension could be
also distributed plastically, if the bolt shear strength was greater / smaller
than the ductile strength against intrados compression, which would result
to rendering the possibility of plastic intrados deformation and equalization
of forces causing fatigue to each bolt.

Page 5
In such case, namely in a marginal failure condition, all bolts would
be fatigued, their strength being in intrados compression and in direction
vertical to the actinic distance between the bolt and the momentary
centre of rotation.
Fig. 1.4. Plastic force distribution on bolting due to torque
The distance of the momentary centre of rotation from the Gravity
Centre of the bolting is defined as x0. According to the plastic analysis, there results an algebraic system to be resolved, since the force equilibrium has been taken toward the axis x as well as that of torques about the centre of rotation A. From the solution of said system, the
distance x0 as well as the strength shearing force VRd are taken. Since the cutting force did not have the direction of some main axis as in the previous case, then it would have been also required to set out the equilibrium equation to the other axis, in which case a 3x3 system would have resulted.

Page 6
Elastic Plastic Plastic
deformations distribution distribution
Fig. 1.5 Force distribution on bolts
Elastic
distribution
Plastic
distribution
Fig. 1.6. Relation between a force causing fatigue to a bolt and a growing deformation.

Page 7
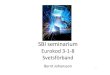
1.1.1.2. Forced centre of rotation In a front slab connection, as the one of the following figure, a
considerable rigidity difference may be observed between the tension and
compression areas.
Compressing forces
Forced centre
of rotaton
Fig. 1.7. Forces of bolt rows in front slab connection, having forced centre of rotation
(2 rows of bolts).
In the compression zone, the compressive force is transferred directly from the beam footing to the strut body. The deformations observed in this area are minor compared to those developed in the tensioned zone, where bending of the front slab, as well as of the strut footing is taking place. Due to such difference in rigidity, the point 1 of figure 1.7 is considered as the centre of rotation. For safety purposes, many a times it is considered that this also coincides with the location of the lower bolt row. The thicker and therefore more rigid the front slab becomes, the more the centre of rotation tends towards its lower end.
Assuming that the rigidity observed is equal to all tensioned bolt rows, the tensioning forces of each row are directly proportional to their distance from the centre of rotation.
In accordance with the foregoing, the following may apply:

Page 8
For bolts of the same size:
In fact, the rigidity of the tensioned bolt rows may differ considerably
amongst them; for instance, the protruding section of the front slab of the
upper beam footing is more flexible than the section located underneath
the beam footing, where the body of the beam contributes greatly to rigidity
increase. As a result, the row 2 of figure 1.8 would apparently receive
greater load than the row 1.
Thick front slab Thin front slab
Fig. 1.8. Impact of the front slab thickness on the force distribution on bolt rows.

Page 9
In case of thin front slabs, the differences in rigidity of the various
bolt rows are more significant, whereas the distribution of forces deflects
much more than a linear distribution.
Forced centre Free centre
of rotation of rotation
Fig. 1.9. Connection of a front slab under flexural torque and tensioning load.
As regards a front slab of ordinary dimensions, it could be reasonably accepted that the tensioning strength on the upper footing of the beam is distributed on rows 1 and 2. However, since the connection is
loaded by the combination of flexural torque and tensioning strength FH, the
forced rotation centre might not be applicable; and this is α condition it should be given closer attention. This depends on the size of the tensioning load FH.
In case the centre of rotation is forced (small FH) then such FH is transferred through the rigid point 1. The torque about this point is:
where (a) is the distance between the gravity centre axis of the beam and
the point 1. Due to horizontal equilibrium, it is taken:
If , then D=0. For D<0, there is no forced centre of rotation. From
(1.15) and (1.16) it results that if , then there is a forced centre of
rotation; whereas if , then there is a free centre of rotation.

Page 10
1.2. Calculation of fillet weld strength.
In this section, we shall present the ground based on which the
strength of the fillet welds on the connections examined shall be
calculated. As effective length l of a filler weld it shall be taken the length
on which such fillet weld has its full thickness.
Fig. 1.10. Fillet weld thickness
The strength of the designing may be calculated either by the
Component Method or by the Simplified Method. In this section, reference
shall be made to the first method, which is considered as being more
accurate, since is has been employed in the calculation of the fillet weld
strength in connection under examination. The particular method takes into
consideration the tensions to the members to be connected (welded), as
shown in Fig. 1.11.

Page 11
Fig. 1.11. Tensions on members to be welded and tensions of fillet weld.
The fillet weld tensions are calculated as follows:
The alternative method proposed by Eurocode 3 gives:

Page 12
The second requirement for s. £ fu/gMw plays some part only if tension “t”
is small, namely, when the resulting force deviates from the horizontal
(see fig. 1.11).
If only σΖ, is existent, then for the fillet weld thickness it may be taken:
• For S235 steel
• For S355 steel
Since plastic analysis is employed for finding actions during construction designing; and since the connection shall be implemented on a point where formation of plastic joint is anticipated, then the minimum
welding thickness should be determined by the condition sz = fy. This
would give:
• For S235 steel
• For S355 steel
This requirement is also used on statically undetermined structures, elastically designed. It should be stressed out that, even in case of elastic designing, it is presumed that the members and the connections have adequate deformation capabilities, such as to be able to compromise with loads and tensions, which usually are not taken into consideration, i.e. loads attributed to temperature differences. This is one of the reasons for which the members being connected should creep, prior to their weld failing.
When the Eurocode relations apply with sz = fy, then the welding strength shall be at least equal to that of the member being connected. In other words, the failure shall be observed on the member and not on the welding. Accordingly, from the member creeping requirement, prior to the friable failure of the welding, it results that the welding designing may be based on the relation:

Page 13
where the index “r” denotes the material of the member to be welded. For
instance, for steel S355 it may be taken:
Since the value of the ratio fyr /fur may exceed the value 0.70, the following
is required: If the deformation feature (ductility) is required, then the welding should be designed in a way to safely bear at least the 80% of the creep force of the weakest member to be connected.
From the foregoing, and referring to the example in Fig. 1.11, a
lower limit of a double fillet welding thickness results:
• For S235 steel
• For S355 steel
Finally, it is worth to be pointed out that fillet weld thicknesses,
which are calculated on the basis of the mean tension method of the
Eurocode, are approximately 1.22 times more than thicknesses calculated
on the basis of the component method, in which case the use of steel
increases by 1.222 ? 1.5 times!
1.3. Determination of effective welding width between a plate and
a non reinforced footing.
Supposing a strut footing on which a plate is welded. Since the footing on which the plate is welded is not reinforced, then the load would tend to cause deformations, which would have a maximum value on the footing edges and a minimum value in the middle (due to body contribution). As a result, the welding sections that are close to the body would be loaded more, in which case it would be deemed necessary to take this distribution of deformation into account in the analysis. Therefore, only a section of both the fillet weld and the footing would be taken into account on calculating the strength of connection components.
For a double “T” cross-section, the effective width beff should be taken as follows:
however

Page 14
where fy is the limit of member creep and fyp, is the limit of plate creep. In
the case of a hollow cross-section, the following shall be applicable, in correlation with the foregoing:
however
Fig. 1.12. Effective width of welding on a non reinforced footing.

Page 15
21.3. Impact of the plate deformation ability on bolted connections. The examination of the impact of the plate deformation ability on a
bolted connection is effected on two basic simulations, the short “T” and the short “L”. The first applies to bilateral connections, such as to open cross-sections; and the latter to unilateral connections, such as closed cross-sections, angles, etc. It is apparent that the strength of the short "T" is twice as much as that of the short "L"; therefore, that is the one to be examined herein below.
Fig. 1.13. Short “T” and short “L” simulations

Page 16
Supposing that the plate of Fig. 1.14 is welded to the footing of a
double “T” cross-section and tensioned. The tensile strength of the
connection, as regards the vertical member, shall be determined by the
most critical failure mechanism of those manifested.
1. Plastic failure of the strut footing.
2. Creep – breakage of strut body.
3. Welding failure
Fig. 1.14. Failure mechanisms for plate welded on strut footing.
Correspondingly, the failure mechanisms for a front slab bolted
on the strut footing shall be as follows:
1. Plastic failure of the strut footing.
2. Creep – breakage of strut body.
3. Welding failure
4. Bolt failure
5. Front slab plastic failure (of short “T”)
Fig. 1.15. Failure mechanisms for plate welded on strut footing.

Page 17
It is apparent that the failure of such connection results from the analysis process, taking into consideration that the first (weaker and determining) failure mechanism is marginally effected. That is how the strength of each potential failure mechanism, which might occur, is calculated and the minimum is kept, according to which the connection strength result. EC3 provides adequate information on the node components and on said failure mechanisms for strut beam connections as well as on other connection types, such as strut bearing, etc. In the following sections, certain basic failure mechanisms on ordinary connections shall be discussed, and a preliminary approach in determining
their strength shall be attempted. 1.3.1. Strut footing failure
1.3.1.1. Welding connection
Fig. 1.16 illustrates a welding connection on a footing of double “T”
cross-section.
Fig. 1.16. Plastic strength forces of a non-reinforced footing.

Page 18
Fig. 1.17. Connection aspect
A part of the tensile power is transferred through rectilinear
tensions without bending to the strut footing. The width to which such
power applies is twc+2rc. The tensile power is given by the relation:
The remaining part of the power should be transferred through
bending of the strut footing to the body. For that type of loading, a model
may be adopted as shown in Fig. 1.17, based on a slab of bound
movements on its three sides, loaded by a linear load at its centre. The
application of plasticity theory maintains that the applied load is directly
proportional to the plastic strength torque of the slab:
where: the coefficient “C” results experimentally, whereas a value of
said coefficient equal to 14 is considered as safe.
Summarizing the above: the overall strength of a non-reinforced
strut footing is given by the minimum value of the following, namely by the
most critical mechanism out of the 2 mentioned above.

Page 19
where beff is the effective width of the footing, as it has been determined in
section 1.3. Because of the limited experiments pertaining to the assessment of coefficient “C”, the effective width, in connection with the determination
of Ft2, is limited to 7tfc.
Accordingly:
In order for the connection to develop plastic deformations,
ductility is required, which is ensured once the beam footing has crept prior
to failing of the welding between footing - plate. Consequently, the
designing strength of a non-reinforced footing should be at least equal to
the 70% of the creeping strength of the beam footing:
Should this requirement not be satisfied, then the connection
should be reinforced by reinforcement plates, as shown in Fig. 1.18:

Page 20
Fig. 1.18. Reinforcement of strut footing.
1.3.1.2. Bolted connection
Contrary to the previous condition of a welded connection, in case
of using front slab bolted on the strut footing, the overall tensile strength is
transferred through the strut footing, resulting solely to flexural torques. In order to appreciate the various forces developed in such
connections, it would be useful to consider from the beginning a simpler model under tensile. Therefore, two short "Ts" are selected, which are
connected by two bolts and loaded by tensile load Ft.

Page 21
Fig. 1.19. Transfer of tensile strengths through bending and model for tensile strength transfer to
bolted connections.

Page 22
It is initially supposed that the force of each bolt is equal to 0.5F t and that
the footing has been designed to transfer such forces through bending.
The necessary footing “tf” thickness should be calculated as follows:
Fig. 1.20. Form of short “T” failure.
Fig. 1.21. Critical failure mechanism π; bolt creep.

Page 23
In this case, the following would be applicable:
In the foregoing equations, the bolt and strut footing dimensions
have been calculated in a way that the tensile strength of bolts would
determine the strength of the connection. In the event of failure, the footings would separate from each other.
In the event that stronger bolts are selected, then the extreme tensile strength would increase, obtaining values higher than those resulted
in the previous case for Ft. Accordingly, footings would creep and the bolt deformation decrease at the same time. In case of failure, footings would not completely separate. This means that there is a contact surface between them resulting to developing contact forces. These forces would reasonably cause further flexural torque to the footings. When such forces are strong enough, then said torque would be equal to the plastification
torque mpl. If this would be the case, four plastic joints would be formed in marginal condition.

Page 24
Fig. 1.22. Critical failure mechanism is the footing plastification.
Fig. 1.23. Critical failure mechanism is the slab-footing plastification.

Page 25
In this case, the following would be applicable:
where
Between the 2 types of failure described above, there is a third
type, in which connection forces develop, the bolts however fail prior to
footing plastification. In such case, both the bolts and the footing are
considered as being critical.
Fig. 1.24. Critical failure mechanism is the slab – footing plastification and the bolt creep.

Page 26
In relation to this case, the energy method for calculating the
marginal tensile strength of the connection shall be illustrated. For the
remaining 2 cases, respective relations may be set out towards finding the
short “T” strength.
The equation of external and internal force power is stated as follows:
and for δ1, δ2
The previous cases are summarized in the following graph:
Fig. 1.25. Relation between footing (slab) resistance and bolts for a Short “T”.
It is recommended that the connection is designed so that the critical point
would be the failure mechanism (1), namely, critical would be the footing,
the reason being that then the deformation ability would be adequately
provided (more ductile mechanism). In the third failure type of Fig. 1.25,

Page 27
the deformation is provided to the connection solely by the lengthening of
bolts, which is far less than the footing deformation of the previous
mechanism. It should be noted that the deformation ability of mechanisms (1) and (2) might increase by selecting bolts threaded lengthwise.
In compliance with EC3, the tensioned zone of a non-reinforced footing should be considered as an aggregate of short “Ts” equal to the
total of the effective lengths of each individual footing (Σ? eff). Adopting the
plasticity theory, the effective length ?eff of a short “t” may be calculated as shown in Fig. 1.26.

Page 28
Fig. 1.26. Effective length of an equivalent Short “t” for one and two rows of bolts.

Page 29
2
Connection of beam – strut by a plate
bolted on the beam body.

Page 30
2.1. Description of mechanical behavior
Linear node simulation
Diagram of a beam shearing
force in node area
Diagram of bending
torques in node area
Fig. 2.1. Linear node simulation

Page 31
2.1.1. Transfer of tension through connection means
Said connection is required to transfer, as stated above, a
shearing force from the beam to the strut through the connection means.
Moreover, as shown in Fig. 2.4, the bolting is further stressed by a torque
coplanar to it, which results from the linear simulation accepted as
applicable. Specifically, the stress is transferred as follows:
Fig. 2.3. Transfer of forces to strut 1
- Bolts (shear and intrados) 2 - Body of the beam 3 - Connection plate
Fig. 2.3. Welding stress
• Shearing force and torque at the bolting centre of gravity by
resolving a framing metallic carrier.
• These values create a force shearing the bolt threads. • The overall shearing and flexure are transferred through intrados
forces to the plate.
• This transfers to the welding a torque vertical to its plane and a
shearing parallel to its axis (see fig. 2.3).
• These values are transferred to the strut footing and are axially
received by it.
In the general case of bolting consisting of many columns and
rows of bolts, the shearing force Ved is considered as being exercised at its
gravity centre, as well as the torque of value e2Ved. Then, it is distributed to the bolts, following the calculation of the polar moment of inertia of the bolting as:

Page 32
Fig. 2.4. Calculation of torque stressing the bolting and the welding
where ‘η’ is the total number of bolts. In the previous sections, we assumed an elastic analysis for the distribution of forces on the bolts. It is reminded
that the stress could be also distributed plastically, if the bolt shearing strength was greater / smaller than the ductile strength against intrados
compression, which would result to rendering the possibility of plastic intrados deformation and equalization of forces stressing each bolt. In this case, the elastic distribution applied is acceptable towards safety; however,
in certain cases, it may not be the best solution as regards economy. Accordingly, due to torque on the corner (most adverse) bolts, the
horizontal force shall be

Page 33
and the vertical
and the resultant active shearing on a (single-sheared) bolt shall be:
Fig. 2.5. Example of transfer of coplanar torque from the gravity centre of bolting
to a bolt; and relation between the position and the force on a bolt.

Page 34
2.1.2. Potential connection failure mechanisms Summarizing the above, one could point out the connection failure
mechanisms:
1. Bolt failure: (a) under shearing. 2. Yield of complete section
(b) under intrados compression
3. Breakage of decreased cross-section 4. Breakage of outer distance (tearing)
5. Plate yield 6. Welding breakage
Fig. 2.6. Types of failure (ductile types are 1(B), 2 and 5)

Page 35
2.1.3. Additional check for a hollow rectangular strut cross-section.
It should be pointed out that in the event of a hollow strut cross-
section, a local phenomenon might appear relating to the aspect of its
footing. This shall be dealt with by an additional check provided by EC3
relating to the axial strength of hollow cross-section footing.
Fig. 2.7. Local phenomenon for RHS cross-sections
2.1.4. Connection classification
Finally, is should be stated that the connection being examined is
classified in class (a) of figure 2.8 due to its high flexibility.
a. case of articulated connection b. case of rigid connection
c. case of semi-rigid connection
Fig. 2.8. Connection types as regards rigidity

Page 36
2.2. Detailed connection calculation
In this section, the particular connection shall be resolved in detail,
so that the results may be compared to those of the previous calculation
routine. Accordingly, the characteristic example of the following connection
shall be selected, following which all checks effected shall be presented.
Suppose that the design shearing force is VEd=60 kN. It is reminded that all dimensions are in kN, mm, unless specified otherwise .
Bolts Μ16/8.8 Steel type: S235
Fig. 2.9. Front view of connection (dimensions in mm)
Fig. 2.10. Detail of connection plate (dimensions in mm)

Page 37
2.2.1. Checking of clearances
2.2.1.1. Bolt clearances For the connection plate, it is:
2.2.1.2. Check of welding thickness
2.2.1.3. Check of beam height adequacy
Fig. 2.11. Distance of bolting centre of gravity from the left plate cheek.

Page 38
Polar moment of inertia of bolting:
Torque in the bolting centre of gravity:
End bolt: xb=yb=40 mm
The end bolt shearing force (i.e. top, right) should be
where η = 4 bolts
2.3.2. Bolting shearing strength Strength of a bolt:
where αν = 0.6 for quality 8.8. (the coefficient 0.85 comes in by virtue of the
selected bolt quality for check under shearing)
Strength of bolting:
2.2.4. Strength under intrados compression The strength of the group of bolts is given by the formula:
with ab = minad, fub/fu , 1, where coefficients k1 and a d are dependent on
the examined row and location of a bolt (outer or inner), respectively. According to the load transfer direction (1st row is the top one) it
shall be:

Page 39
• Row 1:
o Column 1:
o Column 2:
• Row 2:
o Column 1:
o Column 2:
therefore:
2.2.5. Beam section tearing strength Net tensioned surface:
Net sheared surface:

Page 40
Since bolting is eccentrically stressed, then the tearing strength shall be
given by the formula:
2.2.6. Tearing strength of connecting plate section
Net tensioned surface:
Net sheared surface: Since bolting is eccentrically stressed, then the tearing strength shall be
given by the formula:
2.2.7. Welding check The following stresses are calculated:
- σ_ι_, regular stress, vertical to the weld - σII , regular stress, parallel to the welding axis
- τ_ι_, shearing stress (at the neck level) vertical to welding axis
- τII, shearing stress (at the neck level) vertical to welding axis
Fig. 2.12. Definitions of calculated stresses
Torque stressing the welding:
Shearing force stressing the welding:

Page 41
Welding moment of inertia
Therefore
and Consequently, the welding is adequate.
2.2.8. Strength under front failure of hollow strut footing
This check would not have been required if the strut cross-section
would have been of double-T. As mentioned in the mechanical behavior
description section, said check shall be effected by considering the
behavior as plastic, namely, by checking the axial strength of the strut
footing to the tensile strength of the connection plate, a process favoring
safety.
2.2.8.1. Connecting plate tensile strength
It is reminded that the tensile strength results from the minimum of
the yield force for the entire surface and the decreased breaking force
thereof due to existing holes. From fig. 2.13 we conclude that:
and
The breaking force of the decreased cross-section shall be:

Page 42
and the yield force of the complete cross-section:
(2.29)
in which case, Nt,Rd = 269.57 kN
Fig. 2.13. Decreased surfaces
2.2.8.2. Check The above force shall be considered as action towards the check
of the strut footing as regards front failure. According to EC3, the strength
shall be:
where km=1 for tensioning.

Page 43
3
Beam – strut connection
with double angular plates

Page 44
3.1. Description of mechanical behavior
Case of bolting on
the beam body
Linear node simulation
Case of welding on
the beam body
Diagram of a shearing force in node area (V)
Diagram of flexural holes in node area (M)
Fig. 3.1. Linear simulation of connection

Page 45
3.1.1. Transfer of stress through the connection means Said connection is required to transfer, as stated above, a
shearing force from the beam to the strut through the connection means shown in fig. 3.1. The bolting on the beam is further stressed by a torque coplanar to it, which results from the linear simulation accepted as applicable. Namely, the eccentricity of the joint positioning point generates
a torque e1 VΕd, which shall be taken into account in the following
sections. On the other hand, the bolts located at the strut footing are stressed solely by shearing forces.
The mechanism transferring stress via the connection is described below.
Case a: Bolting on beam body
Case b: Welding on beam body
Fig. 3.2. Stress transfer to the connection means
In correspondence with figure 3.2, the path of forces into the
connection means is as follows:

Page 46
1. Shearing force and torque at the centre of gravity of the bolting on
the beam, by solving a metallic carrier frame 2.
ο (a) bolting on the beam: The previously mentioned forces
generate shearing loading on each bolt (double-sheared
bolts). ο (b) welding on the beam: The aforesaid forces stress the 3
fillet welds
3. The overall shearing force and bending are transferred to the leg of
the angular plate on the beam.
4. Through shearing of the two angular plates (mainly and practically
negligible bending due to their short length), the design shearing
force is transferred to the legs of the angular plates on the strut
body. 5. The design shearing force is transferred by intrados forces to the
strut bolts, which are sheared (single-sheared).
6. Shearing is now received by the body or footing of the strut.
In the general case of bolting consisting of many columns and rows of
bolts, the shearing force Ved is considered as being exercised at its gravity
centre, as well as the torque of value e2Ved. Next, it is distributed to the bolts,
following calculation of the polar moment of inertia of the bolting
Fig. 3.3. (a) Stress of welding on beam body. (b) Stress of bolting on beam body.

Page 47
where ‘η’ is the total number of bolts. In the previous sections, we assumed
an elastic analysis for the distribution of forces on the bolts. It is reminded that the stress could be also distributed plastically, if the bolt shear strength
was greater/smaller than the ductile strength against intrados compression, which would result to rendering the possibility of plastic intrados deformation and equalization of forces stressing each bolt. In this case, the
elastic distribution applied is acceptable towards safety; however, in certain cases, it may not be the best solution as regards economy. Accordingly,
due to the torque applied on the corner (most adverse) bolts, the horizontal force shall be
and the vertical
and the resultant design shearing force on a (single-sheared) bolt shall be:
The angular plates shall be checked as regards bending due to the
coplanar torque, which is also equal to
for each footing. The design shearing force shall be VEd / 2 for each plate.

Page 48
Fig. 3.4. Calculation of torque stressing the bolting on the beam
Fig. 3.5. Cases of beam connection (a) on footing (b) on strut body

Page 49
The angular plates shall be checked as regards bending due to
the coplanar torque, which is also equal to
for each footing. Finally, a check shall be carried out on the angular plate
under shearing, with acting shearing force equal to on each one of
them.
centre of gravity
of the welding
Fig. 3.6. Calculation of torque stressing the welding on a leg of an angular plate on a beam
For a more detailed description of the transfer of coplanar bolting
torque to individual bolts, the reader may consult the corresponding force
distribution annex. Assuming that instead of a bolting there is a welding on the beam,
the torque on the centre of gravity thereof may be respectively calculated as stressing the three fillet welds. Finally, the resultant stress developed on
the most adverse point of the welding shall be calculated, and this is

Page 50
checked against the maximum permissible stress, in accordance with the
normative frame that follows.
2.1.2. Critical connection failure mechanisms
Summarizing, the connection failure mechanisms are pointed out,
for which the connection shall be checked:
• Strut bolt failure under shearing • Strut bolt failure under intrados compression
For bolting on the beam:
ο Strut bolt failure under shearing ο Strut bolt failure under intrados compression ο Angular plate leg on beam failure under tearing ο Beam body failure under tearing
For welding on the beam:
ο Fillet welding failure under maximum developed stresses
• Angular plate leg on strut failure under tearing • Strut body failure under tearing • Angular plate failure under shearing • Angular plate failure under bending
3.1.3. Connection classification The connection being examined is classified in class (a) of figure 3.7.
a. case of articulated connection b. case of rigid connection
c. case of semi-rigid connection
Fig. 3.7. Node classification according rigidity thereof.

Page 51
3.2. Detailed connection calculation In this section, the particular connection shall be resolved in detail,
so that the results may be compared to those of the previous calculation
routine. Accordingly, the characteristic example of the following connection
shall be selected, following which all checks effected shall be presented.
Suppose that the design shearing force is VEd=110 kN. It is reminded that all dimensions are in kN, mm, unless specified otherwise.
Bolts M12/4.6 Angular plates 1.90/10 Steel type: S235
Fig. 3.8. 1st front view of connection (dimensions in mm)

Page 52
Fig. 3.9. 2nd front view of connection (dimensions in mm)
Angular plate leg Angular plate leg
on beam on strut
Fig. 3.10. Detail of bolt positioning on angular plates

Page 53
2.2.1. Checking of clearances 3.2.1.1. Checking bolt clearances For the leg of the angular plate on the beam and strut we have:
3.2.1.2. Adequacy check of height of the angular plate 3.2.2. Shearing strength of a bolt Shearing strength of a bolt
where αν = 0.6 for quality 4.6.
3.2.3. Strut bolt check under shearing
Due to the acceptance of the static simulation with the joint in the model, at the point of section of the gravity centre axis of the beam with the outer side of strut footing cheek, it is clear that said bolts would transfer
solely a shearing force equal to the design shearing force VEd, without
developing bending torque, at the same time, which would generate tensile forces on the bolts. Therefore, each of the 8 single-sheared bolts would be stressed by a design shearing force equal to

Page 54
The bolting strength would be:
3.2.4. Strut bolt check under intrados compression The strength of the bolt cluster is given by the formula:
with ab = minad, fub/fu , 1, where coefficients k1 and a d are dependent on
the examined row and location of a bolt (outer or inner), respectively. According to the load transfer direction (1st row is the top one) it
shall be:
• Row 1:
o Column 1:
o Column 2:
• Row 2:
o Column 1:

Page 55
o Column 2:
Therefore, The strength of all 8 bolts on the main beam under intrados compression
would be:
3.2.3. Beam bolt check under shearing Bolting polar moment of inertia:
Torque coplanar to bolting:
Fig. 3.11. Coordinate system at the centre of gravity of bolting on a beam

Page 56
The end (most adverse) bolt (xb=70mm and yb=130mm), is
stressed by a shearing force:
where η = 4 bolts and
3.2.4. Beam bolt check under intrados compression The strength of the bolt cluster according to EC3 is given by the
formulae:
• Row 1:
o Column 1:
o Column 2:
• Row 2:
o Column 1:
o Column 2:

Page 57
Therefore
3.2.7. Check of angular plates under shearing In an angular plate a shearing force is acting equal to VEd/2, whereas the
stressing torque is equal to xΚΒ VEd / 2 (the distance xΚΒ is defined in figure 3.11). In this particular example, it is:
and
the ductility criterion shall be applied
in order to verify whether the holes should be deducted from the shearing
surface calculation,
in which case, the decrease of shearing surface due to the holes would not
be necessary. Consequently,
the shearing strength of an angular plate is given by the formula:

Page 58
3.2.8. Check of angular plates under bending As already mentioned, the torque stressing one angular plate is:
Since the above ductility criterion is satisfied, the subtraction of the holes
surface for calculating the resistance torque on the angular plate cross-
section is not required. Therefore:
whereas
3.2.9. Beam section tearing strength
Fig. 3.12. Definition of surfaces Αην, Αηt
Net tensioned surface: Net sheared surface:
Since bolting is eccentrically stressed, the tearing strength shall be given by
the formula:

Page 59
3.2.10. Tearing strength of an angular plate leg section on a beam Net tensioned surface:
Net sheared surface:
Since bolting is eccentrically stressed, then the tearing strength shall be
given by the formula:
3.2.11. Tearing strength of an angular plate leg section on a strut Net tensioned surface:
Net sheared surface:
Since bolting is considered as not being eccentrically stressed, the tearing
strength shall be given by the formula:
3.2.12. Case of welding on beam connection Since the beam is welded instead of bolted, the following checks are
carried out on the angular plates: Suppose the welding thickness is α=3
mm

Page 60
Fig. 3.13. Case of welding on the beam – angular plate connection
The distance “e” from the outer side of the strut footing cheek to the
gravity centre of the welding is equal to 66.18 mm. Next, the moments of
inertia of the fillets shall be calculated:
The torque stressing the welding is:
Tensions of the fillet weldings along the main axii:
Resultant stress:

Page 61
The correlation factor for steel S235 is defined as βw = 0.80; accordingly,
the welding strength is:

Page 62
4
Beam on beam connection
with double angular plates

Page 63
4.1 Description of mechanical behavior
Linear simulation of node
Diagram of beam shearing
force at the node area
Diagram of beam bending
torque at the node area
Figure 4.1 Linear simulation of the connection and stress values

Page 64
4.1.1 Transfer of stress through the connection media
This connection is required to transfer, as mentioned above, a shearing force from the secondary beam to the main beam through the connection media shown in figure 4.2. The bolts on the secondary beam are also being stressed by a coplanar torque that results from the linear simulation, which has been accepted as valid. That is, the eccentricity of
the point where the joint is being fixed creates a torque eVEd, which shall
be taken into account later. On the other hand, the bolts on the body of the main beam are considered as bearing only a shearing force due to the small distance between the center of the joint, and this results in a practically zero torque, which would otherwise produce tensile forces on the bolts. In particular, the stress is borne as follows:
Figure 4.2 Bearing of stress
at the connection

Page 65
Fig. 4.3 Stressing of bolts on the body of the secondary beam
According to figures 4.2 and 4.3, the path of the forces on the
connection media is as follows:
1. Shearing force and torque at the centre of gravity of the bolts on the
secondary beam by solving a metallic frame bearing body
2. The above forces create a shearing load on each bolt (double-
sheared bolts).
3. The overall shearing force and bending is transferred through
intrados forces at the leg of the angular plate on the secondary beam
4. By shearing the two angular plates (mainly, and with practically
insignificant bending due to their small length) the design shearing
force is transferred on the legs of the angular plates on the main
beam body
5. The design shearing force is transferred by intrados forces to the
main beam bolts, which are sheared only once (single-sheared bolts)
6. The shearing force is then received by the body of the main beam
In the general case of bolting, which consists of many columns and
rows of bolts, it is considered that the shearing force Ved is exerted at the
center of gravity of the bolting area, as well as the torque e2Ved. Then it is distributed on the bolts after the calculation of the polar moment of inertia of the bolting area
where n is the total number of bolts. As mentioned above, an elasticity
analysis has been assumed for the distribution of forces on the bolts. It
should be reminded that the stress might also be plastically distributed,

Page 66
provided that the shearing strength of the bolting area is greater than the
higher ductile strength against intrados compression, which would enable
plastic deformation of the covings and equalization of the stress forces on
each bolt. For the case in question, the applied elastic distribution
enhances safety and, in some cases, may be the best solution as regards
cost-saving. Thus, the horizontal force due to the torque on the corner
(most adverse) bolts shall be:
and the vertical force shall be
while the resultant shearing force that acts on a (single-sheared) bolt shall
be:
Fig. 4.4. Calculation of torque stressing the bolting area on the secondary beam
Moreover, the angular plates shall be checked for bending due to
their coplanar torque, which is equal to
for each plate. Finally, a shearing check shall be carried out for the angular plates with

Page 67
acting shearing force on each one equal to . For a more detailed description of the coplanar bolting torque
transfer on individual bolts, the reader can refer to the corresponding force
distribution annex.
4.1.2 Critical mechanisms of connection failure
Summarizing, we note the connection failure mechanisms for which
the connection shall be checked:
• Main beam bolts shearing failure • Main beam bolts intrados compression failure • Secondary beam bolts shearing failure • Secondary beam bolts intrados compression failure • Failure of angular plate leg on the main beam due to tearing • Failure of angular plate leg on the secondary beam due to tearing • Main beam body tearing failure • Secondary beam body tearing failure • Angular plate shearing failure • Angular plate bending failure
4.1.3 Connection classification Finally, we mention that the described connection is classified in category (4) of figure 4.5 due to its high flexibility.
a. articulate connection b. rigid connection
c. semi-rigid
connection Figure 4.5
Connection classification

Page 68
4.2 Detailed connection calculation In this section we shall solve the connection in question in detail, in order to enable comparison of the results with those of the previous calculation routine. So we select the typical connection example that follows and then we describe all checks to be carried out. Let the design shearing force be
VEd=100 kΝ. It is reminded that all dimensions are in kN and mm, unless
specified otherwise.
main (supporting)
beam HEB300
equilateral angular plate secondary (supported) 90/90/10, L = 160 beam IPE 300
Bolts M12/4.6 Steel quality S235
Figure 4.6 1'' connection section (dimensions in mm)
Figure 4.7. 2nd connection section (dimensions in mm)

Page 69
Leg of angular plate Leg of angular plate on on the secondary beam the main beam
Figure 4.8. Detail of bolt fixing on the angular plates
Convention: From now on, the main beam shall be indicated as ΚΔ, and the
secondary beam as .
4.2.1 Check of Distances
4.2.1.1 Bolt distances
For the leg of the angular plate on the secondary beam we have:

Page 70
4.2.1.2 Check of beam height adequacy
where 30 + 40 + tf,ΚΔ = 89, the shearing of the upper footing of the
secondary beam.
4.2.2 Shearing strength of a bolt Shearing strength of a bolt:
where αν = 0.6 for quality 4.6.
4.2.3 Main beam bolts shearing check Since we have assumed the static simulation with the joint on the
model, at the intersection point of the two center of gravity axii of the connected beams, it is clear that these bolts transfer only a shearing force
equal to the design shearing force Ved, and no bending torque is
developed, which might otherwise produce tensile forces on the bolts. The more the main beam can swivel, the better this assumption approximates the actual behavior of the connection. Thus each one of the 8 single-sheared bolts is being stressed by a design shearing force equal to
The bolting area strength shall be:
4.2.4 Main beam bolts intrados compression check The group of bolts strength is provided by the formula

Page 71
With ab = min ad, fub/fu, 1, where coefficients k1 and ad depend on the
checked bolt row and position (inner or outer) correspondingly. Along the direction of load transfer (1st row is the top one) we
have:
• Row 1:
o Column 1:
o Column 2:
• Row 2: o Column 1:
o Column 2:
Thus
The intrados compression strength of all 8 bolts on the main beam is:

Page 72
4.2.5 Secondary beam bolts shearing check Polar moment of inertia of bolting area:
Torque, coplanar with the bolting area:
Figure 4.9. Coordinate system at the center of gravity of the bolting area
on the secondary beam
The edge (most adverse) bolt (xb=25 mm and yb=50 mm) is being stressed
by a shearing force:
where n = 4 bolts and
4.2.6 Secondary beam bolts intrados compression check The group of bolts strength is provided by the formula

Page 73
with ab = min a d, fub/fu, 1, where coefficients ka and ad depend on the
checked bolt row and position (inner or outer) correspondingly. Along the direction of load transfer (1st row is the top one) we
have:
• Row 1:
o Column 1:
o Column 2:
• Row 2:
o Column 1:
o Column 2:
Thus

Page 74
4.2.7 Shearing check of angular plates An angular plate is subjected to a shearing force equal to VEd/2,
and the torque stressing it is equal to χΚΒ VEd / 2 (distance χΚΒ is defined in figure 4.9). In this particular example we have:
and
the ductility criterion shall be applied
to establish whether the holes must be excluded from the calculation of the
shearing surface
so no decrement of the shearing surface due to the holes is required, and
thus
The shearing strength of one angular plate is provided by the formula:
4.2.8 Bending check of angular plates As mentioned above, the stressing torque on one angular plate is:
Since the above ductility criterion is met, no decrement of the hole
surfaces is required in order to calculate the resisting torque of the angular
plate cross-section, thus
while

Page 75
4.2.9 Secondary beam plate tearing strength Net surface under tensile stress:
Net surface under shearing stress:
Since the bolting area is being stressed eccentrically, the tearing strength is
provided by the formula:
Figure 4.10. Definition of c, w and k distances

Page 76
5
Continuity restoration of a beam subjected to
bending and tensile stress with body-footing
plates
5.1 Description of mechanical behavior The connection in question is expected to restore the continuity of
a member with double-T cross-section, by transferring, as mentioned
above, the bending torque, and the shearing and pivotal force through the
media.

Page 77
Diagram of bending torques
at the node area [M]
Diagram of pivotal forces
at the node area [N]
Diagram of shearing
forces at the node area [V]
Figure 5.1 Linear simulation of the connection and stress values at the restoration area
As shown in figure 5.1, the connection can be considered as
completely rigid; furthermore, this is the reason why the torque can be
transferred through it. This is due to its high pivotal rigidity, to which the
footing plates mainly contribute. If no such plates existed, the connection
would be considered as articulate, since if there were only plates on the
body the two members would pivot easily towards one another and the
node would behave in a much more flexible manner.

Page 78
Later on, we shall describe the mechanism by which the stress
values are transferred from the continuity restoration area to the connection
media, the possible failure mechanisms, and the required checks. The stress values that result by solving the metal frame are
developed at the connection area of the two members.
5.1.1 Transfer of stress through the connection media
These forces must be transferred to the connection media (centers
of gravity of bolting areas) and to the body footing plates, in order to
produce the design actions of this connection. Initially, the quantities shown
in figure 5.2 are transferred to the plates, and the plates transfer them
through intrados forces to the bolts as shearing forces. These are then
transferred to the overall cross-section of the member, beyond the
connection area.
Figure 5.2 Cross-section at the continuity restoration area and internal stress values
5.1.1.1 Transfer of bending torque
The bending torque is transferred to the body and footing plates in
an elastic manner, according to their rigidity, that is, to their moment of
inertia for bending stress. In particular, the torque received by the body
plates shall be equal to:

Page 79
while the torque on the footing plates is:
This torque creates a pair of pivotal forces on the footing plates, and each
force is equal to:
Figure 5.3. Moments of inertia of plates around axis y - y
5.1.1.2 Transfer of pivotal force
The rigidity against pivotal stress is equivalent, as it is known, to
the area of the member under stress, so according to the above we have:
Pivotal force on body plates:
Pivotal force on footing plates:
Thus the total pivotal force (due to overlapping) on the footing plates shall
be:

Page 80
Figure 5.4. Plate surface areas
5.1.1.3 Transfer of shearing force
The shearing force is considered as being received only by the
body plates, since the shearing surface of the footing plates is practically
negligible.
5.1.2 Stressing of bolts
1. Footing bolts: Their shearing stress is only equal to Nfinal,fl 2. Body bolts: They are subjected to shearing stress after
analyzing the coplanar torque into an equivalent bolt shearing
force. This shall be equal to Mbolts,web=Mw-eVEd. Similarly, the
pivotal force Mw and the shearing force VEd are distributed on each bolt and the resulting design force for the most adverse positioned bolt is calculated
where n is the number of bolts.

Page 81
Single-sheared footing bolts
(only shearing)
Double-sheared body bolts (shearing resulting
from torque Mw, shearing
force VEd and pivotal force
Nw, after projecting them at the center of gravity
of the bolting area).
Figure 5.5. Stressing of bolting areas on the body and footing
5.1.3 Case of member with welded connections
5.1.3.1 Body plate
Since, instead of bolting there is weld-fixing of one of the two
members to be connected with the body plate, we correspondingly
calculate the torque at the center of gravity of the fixing area (see fig. 5.6):
Note that we must first calculate distance e of the center of gravity of the
welded area from the continuity restoration area. This is subjected to
bending forces on the same plane, as well as to tensile and shearing
forces. So we find the moment of inertia of the welded area towards the
horizontal and vertical axii, as well as the acting torque:

Page 82
Then we calculate the stresses at both directions and finally we calculate
their resultant force fs, which is compared with the strength stress.
5.1.3.2 Footing plate
The weldings of the plate on the footing are being stressed only by the Nfinal,fl force, so we calculate the stresses on the welded area and we compare them with its strength stress (see fig. 5.6.).
Body plate Footing plate
Figure 5.6. Weldings (outer seams) on the left member
5.1.4 Plate stressing
The body footing plates shall be checked as regards their tensile stressing by forces Nw and Nfinal,fl respectively. The tensile strength shall result as the minimum between the yield force for the total plate surface and the breaking force as reduced due to any holes.

Page 83
5.1.5 Member cross-section stress
Finally, the forces end up on the cross-section of the member to be
connected. It must be ensured that this cross-section is able to safely bear
such loads. Thus the cross-section shall be checked under bending,
shearing, and tensioning simultaneously. The ductility criterion as regards
whether the holes shall be subtracted in each check of this kind is as
follows:
where Anet is the reduced surface of the part subjected only to tensioning,
while A is the overall surface of the tensioned part of the cross-section or footing, depending on the case. In order to find these parts, the plastic neutral axis of the cross-section must be found. It muse be reminded that this axis does not necessarily pass from the center of gravity of the (twin symmetrical) cross-section, since there also exists a pivotal design force. So, if the ductility criteria are met, no reduction due to holes is required for the calculation of the strength torque of the cross-section. The same stands
for the shearing check, where coefficient Anet corresponds to the overall
shearing surface except the holes. In particular, we must calculate both the tensioned surface of the
cross-section as equilibrium point of the inner stresses with the externally
applied pivotal force, and the reduced surface due to holes. If the above criterion is met for the tensioned part, we can then consider as negligible the reduction of the cross-section strength due to the holes in it. In the
opposite case we must further reduce the plastic resistance torque of the cross-section due to the holes at the tensioned area of the body,
considering that the category of the cross-section is 1 or 2, and the strength torque results as follows:
Regarding shearing, the shearing surface of the cross-section is calculated
as
as well as the corresponding reduced ΑV,net due to the holes in the body.

Page 84
We check whether the ductility criterion is met in order to deduce whether
the shearing strength is affected by the holes in the body of the cross-
section. Then we reduce the shearing surface and the design shearing
strength results from the formula:
5.1.6 Checks to be carried out
Summarizing, we present the checks to be carried out for this
particular connection:
• Bending check of cross-section • Shearing check of cross-section • Footing bolts shearing check • Footing bolts intrados compression check • Footing plate shearing check • Body plate tensioning check • Body bolts shearing check • Footing bolts intrados compression check
If there are weldings on the left member:
• Footing welding check under maximum stress buildup • Body welding check under maximum stress buildup
5.2 Detailed connection calculation
In this section we shall solve the connection in question in detail, in
order to enable comparison of the results with those of the previous
calculation routine. So we select the typical connection example that follows and then
we describe all checks to be carried out. We suppose that we have a member with cross-section IPE 400, with design stress values at the
restoration area NEd=30 kN, VEd=60 kN and MEd=150 kNm. The
connection media and their qualities are shown in fig. 5.7. It must be reminded that all dimensions are in kN and mm, unless specified otherwise.

Page 85
Footing bolts: Μ20/4.6, body bolts: Μ16/4.6.
Footing welding thickness 6 mm, body welding
thickness 4 mm. Steel quality S235, dimensions in mm.
Figure 5.7. Front view and section characteristic at the connection area.
5.2.1 Check of Distances
5.2.1.1 Check of Bolt Distances For the plate on the beam body we have:

Page 86
For the plate on the beam footing we have:
5.2.1.2 Check of beam height adequacy
where 30 + 40 + tf,K = 89, the shearing of the upper footing of the
secondary beam.
5.2.2 Beam cross-section checks at the restoration area
We shall calculate the strength values for the cross-section of the
beam, and at the same time we shall check whether the ductility criterion is
met.
to establish whether the holes must be excluded at the tensioned part of
the cross-section. The cross-section is classified in category 1.
5.2.2.1 Check of the overall cross-section Plastic resistance torque:

Page 87
where
5.2.2.2 Check of reduced cross-section at the restoration area
5.2.2.2.1 Bending strength check Footing surface: Reduced footing surface:
so the ductility criterion is not being met, and we have to take into account
the reduction of the cross-section strength due to the footing holes.
Then we shall calculate the surface area of the tensioned part of the cross-
section, due to the tensioning pivotal force and to the bending torque as
shown in figure 5.8.
plastic neutral axis
tensioned rows
of body bolts
Figure 5.8. Shift of the center of gravity axis of the cross-section due to pivotal force

Page 88
Calculation of the tensioned cross-section surface area due to proper
quantities N and M: Assumption (1): the neutral axis intersects the cross-section body
where From the first equation we have:
and from the third one
so assumption (1) is valid. We check whether further reduction of the beam strength is required due to
the holes in the body. The tensioned cross-section surface area shall be:
due to the tensioning pivotal force. So we must reduce the 2 footing holes
and 2 from the 3 body holes. The reduced cross-section surface area due to the holes is:
and again the ductility criterion is not being met, so we have to take into
account the 2 body holes in order to reduce the plastic resistance torque of
the cross-section. Thus we have to reduce all of the holes of the tensioned
part (body and footing). Distance of footing holes from the neutral axis:
(as defined in fig. 5.8) Distance of 1st tensioned row of body bolts from the neutral axis:
hw1=147.18 mm

Page 89
Distance of 2nd tensioned row of body bolts from the neutral axis:
hw2=14.84 mm The plastic resistance torque becomes:
5.2.2.2.2 Shearing strength check The net sheared surface is:
The criterion
is met, so we consider that the body holes do not affect the shearing
strength and the overall cross-section check, as described above, is valid.
5.2.3 Bolts Check
5.2.3.1 Check of Footing Bolts
The stress values at the continuity restoration area are distributed
on the footing and body blades. The shearing force is considered as being
fully received by the body blades, and the torque is distributed according to
the blade rigidity. According to the above, we initially calculate the moments
of inertia of the body and footing plates.
The torque shall be distributed as follows:

Page 90
The pivotal force stressing each footing plate shall be:
and the pivotal force on each body plate shall be:
Due to bending, an additional pivotal force is applied on the feet, which is
equal to:
The total design pivotal force on the footing bolts is then equal to: 5.2.3.1.1 Bolt strength under footing shearing
where αν = 0.6 for quality 4.6.

Page 91
5.2.3.1.2 Strength of a group of bolts under intrados compression
The group of bolts strength is provided by the formula:
with ab = minad, fub/fu, 1, where coefficients k and ad depend on the
checked bolt row and position (inner or outer) correspondingly. Along the direction of load transfer (1st row is the top one) we
have:
• Row 1:
o Column 1:
o Column 2:
• Row 2:
o Column 1:
o Column 2:

Page 92
• Row 3:
o Column 1:
o Column 2:
Thus
5.2.3.2 Check of Body Bolts Torque acting at the center of gravity of the bolting area:
where x = 100 mm is the distance of the connection restoration area to the
center of gravity of the bolting area.
5.2.3.2.1 Footing bolt shearing strength
where αν = 0.6 for quality 4.6.

Page 93
5.2.3.2.2 Strength of a group of bolts under intrados compression
The group of bolts strength is provided by the formula:
With ab = min ad, fLb/fu, 1, where coefficients kt and ad depend on the
checked bolt row and position (inner or outer) correspondingly. Along the direction of load transfer (1st row is the top one) we
have:
• Row 1:
o Column 1:
o Column 2:
• Row 2:
o Column 1:
o Column 2:

Page 94
• Row 3:
o Column 1:
o Column 2:
Thus
5.2.4 Check of footing and body plates
5.2.4.1 Check of footing plate under pivotal force The tensile strength of the footing plate is calculated as the minimum
between the yield force for the total surface and the breaking force as
reduced due to any holes.
Reduced cross-section:
where t is the plate thickness, b is its width, and e2, pu, p2 are the bolt
distances as specified in EK3.
Thus

Page 95
5.2.4.2 Check of body plate under pivotal force
The tensile strength of the footing plate is calculated as the
minimum between the yield force for the total surface and the breaking
force as reduced due to any holes.
Reduced cross-section:
where t is the plate thickness, b is its width, and e2, plf, p2 are the bolt
distances as specified in EK3.
Thus

Page 96
6
Connections of beams –-
columns with end plate

Page 97
6.1 Description of mechanical behavior
6.1.1 General
Torques are developed at nodes, on foundations (carriers) whose lateral stability is provided through the framing operation. Therefore, connections between beams - columns must be formed as torque connections, i.e. able to carry torques and the relevant shearing forces, from beams to columns. Development of connection torques is a function involving several factors such as the beam profile, column profile (open or closed cross-section profiles), connection type (bolted, welded or composite), method of construction (only factory - made or on - site welds), several geometrical or other restrictions and especially construction practices. The multitude of these factors is exemplary or the variety encountered in the formulation of such connections; however, their development is beyond the scope of the present paper.
6.1.2 The rationale of semi-rigid connections and the
need for ductile behavior
The last decades saw the development of the concepts of semi-
rigid connection and the partial - resistance connection; at earlier times,
connections were designed either as articulated joints or as full-strength
pilings. Due to the lack of theoretical and experimental research, it was
often unclear whether connections designed as full-strength pilings, would
also function in practice as designed by the engineer. Due to the absence of suitable design models, connections were
often designed much stronger and more rigid than needed, resulting in non-
economical designs. This design would often contradict the overall design
assumptions of the structure; it could therefore influence safety of the
structure in question. Design of the initial nodes has been based on
experimental observations. Test results as such were discussed at length and led to the development of simple Simulations for manual calculation
purposes. Test results were recently stored in databases, thus allowing
prediction of node properties through analytical formulae. The most
important properties are their bending torque strength (resistance) MjRd,
deformation / rotational stiffness Sj and the deformation /rotational capacity
φCd. These properties can be predicted with remarkable accuracy. The complexity of the problem due to the presence of defects, residual

Page 98
stresses, friction etc., in some cases requires a behavior simulation through
the use of detailed finite element simulations. Hence, beam - column connections required to transfer torques,
are often selected to be constructed as semi-rigid. This is usually
dependent upon economic criteria of design, as mentioned. Formulation of
continuous framing requires rigid or piled, full - strength connections.
Contrary to that, in plain connections (e.g. shearing), are lower cost alternatives, but the resulting beams are of larger size. An intermediate
solution (neither rigid connections, nor members of much larger cross
sections), is implemented in semi-rigid connections.
Beam design
Figure 6.1 Quantity of support torque shall be determined upon design
In this case, the beam shall be dimensioned for Μ = MFREE -
MCΟNN while linking plays a key role for semi-rigid frame design.

Page 99
6.1.3 Classification of torque - transferring connections
full strength
partial strength
where
Classification according to strength
Strength
torque
Articulated
Classification according to rigidity
1. full strength,
rigid, non-ductile 2. full strength, rigid,
ductile 3. partial strength,
rigid, ductile? 4. full strength,
semi-rigid, ductile 5. partial strength,
More ductile semi-rigid, ductile
Less ductile
Classification according to ductility
Figure 6.2 Classification of connections according to strength, rigidity, and ductility

Page 100
The key characteristics of a connection are ductility and classification as a partial connection. The first term pertains to the ability to develop a plastic joint and is fully dependent upon its rotational capability. The second term denotes that the strength torque of the connection is less than the adjoining beam. From the moment that beam strength torques are applied to connections, the latter shall be capable of making a sufficient rotation, so that the plastic zone may actually absorb energy. The rotation
that the beam must withstand is then adjusted in regulatory terms and ranges between 0.02 and 0.04 rads. In practice, the strength torque of the connection selected, is within a range of 30-50% of the plastic strength torque of the beam.
6.1.4 Deformation capacity To enable the connection to sufficiently rotate, some of its elements
must initially exhibit controlled yield. Bent plates (flange, end plate etc.) and the body of the beam / column system under shearing are the prevailing node components selected to reach their ratio limit. In fact, the most important aspect is to avoid potential brittle failure of other joint components. This category includes welds as well as tensioned bolts. Thus, a component of the joint must be dimensioned as the «weakest»; this process is selected upon the design phase. Commonly, such a component is the bolted end plate, whether extending to the face or projecting on both opposite sides of the beam.
End plate at the Projecting end plate face of the beam
Figure 6.3. End plate types

Page 101
Check of rotational adequacy will be implemented by comparing
rotational capability available with the necessary rotation of the beam at the
joint position. The latter is related to the geometrical and stress conditions
of the supported beam. For example, for a both-ends supported beam
under distributed fixed load, the necessary rotation is provided from the
following formula:
under accumulated load from :
etc. Rotational capability on the one hand depends upon configuration of the joint. Connections with a column of bolts often possess sufficient rotational capability. However, for larger shearing forces, where a second bolt column might be necessary, rotational adequacy must be controlled. Rotational adequacy must be also controlled on welded joints. Regarding bolted connections on end plates it is apparent that deformability must be the result of the deformability of the tensile zone, given the fact that deformability of the compressed part of the joint is low. To this end, deformability of the three T-stubs must be examined, as discussed in the
introductory chapters. For a given deformability 6U, the resulting rotational
capability is as follows:
where z is the distance between the compression and tension centers of
gravity. As demonstrated in the reference chapter in deformability of the 3
T-stub failure mechanisms, sufficient rotational capability is often available
in cases of critical end plate. For this purpose, the thickness of end plates
as well as the height z of the joint shall be restricted.

Page 102
Figure 6.4. Yield of end plate shall protect bolts and welds from undertaking
additional loads
Bolt strength (kN) Example for bolts Μ24 / 8.8
Critical bolts
Critical end
plate and bolts
Critical end plate
End plate
thickness (mm)
Figure 6.5. Impact of end plate thickness to the type of failure

Page 103
6.1.5 Pursuit of ductile behavior
It is very common to adopt the rule of restricting thickness of the end plate to approximately 60% of bolt diameter (assuming that the quality of the latter is at minimum 8.8). Even thinner end plates would carry higher torques, with a risk of premature failure due to bolt breakage, before performing the necessary rotation of the node. End plates designed merely under the bending strength criterion, may have a thickness equal to or greater than bolt diameter. These are not considered to be ductile. Figure 6.5 e.g., would require an end plate 25 mm thick so that bolts Μ24 / 8.8 obtain their full plastic resistance. In addition to the above it must be specified that a thinner end plate will make a more ductile joint to behave in a less rigid manner in comparison to a thicker one.
Rigidity or stiffness is much more useful in portable frames in comparison to fixed ones. It contributes to the stability of the metallic frame regarding portable frames; specifically for fixed frames it only contributes to the restriction of beam shearing, while it restricts rotation of columns. Generally, upon selection of end plate thickness, rigidity and ductility of the joint may be regarded to be contradicting concepts, as the pursuit of one will diminish the other. Stiffness of end plate, intended to be the critical component of the joint, is proportional to its thickness in the power of two or three. Ductility under no circumstances may be ignored, thus larger and / or stronger bolts must be preferred, in fact restricting the thickness of end plate. An optimal combination would be Μ24 / 8.8 or 10.9 bolts on one end plate of 15 mm.
The above fully demonstrate the need to perform controls
regarding deformations beyond structural adequacy of such joints. In
regulatory terms, control of deformations shall be performed by applying
rotational capacity checks according to EC3; however this is currently in a
premature stage. A connection is considered capable of behaving as a
plastic joint provided that any of the following conditions is met: • Strength torque is restricted by shearing of the body of the
pillar
• Strength torque is restricted by column flange in terms of
bending; the failure mechanism is the first one (only flange is
critical) • End plate under bending would restrict strength torque and
failure mechanism is the first (only end plate is critical)

Page 104
Only in the special case of twin - side node arrangements
(perimeter columns), it is possible that the first of the above mentioned
conditions is met. In case a beam is located on both opposite sides of the
column, active torques can be balanced, thus greatly reducing shearing of
the column body; therefore, for plastic design the intent is that the 2 latter
conditions apply.
Case 1: ductile joint when shearing strength of column body is critical Case
2: ductile joint when column flange is critical, commonly for thin flange Case
3: ductile joint when end plate is critical; the thickness of the plate as a
function of bolt quality / size shall be determined in the design phase
Figure 6.6. The 3 rules specified by EC3 to allow sufficient rotational capability

Page 105
6.1.6 The component method in general
This paragraph discusses certain general information on the node component method, as proposed by EC3 to analyze joints with end plates. Implementation of the component method will permit examination of several
joint types in three main steps: classification of node components, estimation of the force - deformation diagram of each individual component
during the initial rigidity phase, strength, force and deformation and eventually composition of these components to estimate overall behavior of
the node. Component method principles are mainly based on the work by Zoetemeijer. It is possible that components are stressed by tension, compression and shearing.
The accuracy of this method is based on the precision of description of the main components by independent springs and the quality of the composition. The method allows very simple predictions for practical
application on complex models, aiming at further extensions. It is assumed that component properties are independent, thus they can be easily
simulated; however some components are not acting independently; they are affected by others. This can be overcome by applying simplifying
assumptions, since a generic method based on an iterative calculation procedure would be complex for practical use.
Behavior of components can be generally described by a non - linear force - deformation plot. Behavior is often non - linear and includes several influences (strain hardening, contact between elements, membrane effects, 3- D stress distribution etc.), however it can be simplified to a bilinear or trilinear model. Model parameters are derived from component dimensions and material properties. The most important properties include
design resistance FRd, rigidity coefficient k and deformation strength 6C. Joint properties are assured through the blending of properties of
independent components. When a non - linear component behavior model
is used, it is possible to employ a progressive blending process. This approach allows the calculation of a full torque - rotation plot
for the node. In actual applications, engineers usually need only the initial
stiffness and bending torque resistance of the node. This can be easily
assured by blending of the components which are described by a linear
model.

Page 106
Node Initial stiffness
resistance Experimental plot
Elastic limit Design plot
Deformability Rotation, rad
Figure 6.7. Node rotation torque plot 6.1.6.1 Transfer of forces to the joint
To examine the behavior of the present joint, it shall be broken into
several components, which shall be simulated by using springs. Connection
of the individual springs in appropriate layout (series or parallel) will yield
the resulting joint response. Breaking into components can be effected
using appropriate subsystems, which sum up the response of several
individual elements.
Figure 6.8. Joint broken down into subsystems
Distinguishing of subsystems is carried out depending on the stress
they transfer. Thus, torque connections are broken into a tensioned and a
compressed zone, whose response differs due to the difference in stress.
Joints that only transfer axial forces can be examined in a similar manner,
by examining force transfer areas. The following shall apply to torque
connections:

Page 107
where: Fc, Rd , Ft,Rd the strength values of compressed and tensioned
zones respectively, and z is the distance between the compression and
tension centers of gravity. Rotation capacity:
ή
depending on whether the zone under compression or tension is critical,
where:
: deformability of compressed or tensioned zone
: deformations, of compressed or tensioned zone - commonly
elastic - for a load level exhausting the resistance of the other zone
The following is a detailed description of the calculation of tensile
compressive forces of the joint, and of lever arm z.
All torque connections are designed under the same rationale,
irrespective of whether they have been selected to become rigid or full-
strength. The design process shall ensure that all joint elements are
capable of receiving the torque applied and a common shearing force. Axial
action is largely negligible, as beams are considered to be part of a
diaphragm which apparently does not carry loads along its axis. All torque connections are designed under the same rationale
irrespective of whether they are intended to be rigid or full- strength. Design
process shall ensure that all joint components are able to carry the torque
applied and a common shearing force. Axial action is largely negligible, as
beams are considered to be part of a diaphragm which apparently does not
carry loads along its axis. For example, a typical beam - column joint is required to transfer
torque by developing a pair of forces, a compressive force close to the
lower beam flange and a tensile force at the upper section of the joint. In
case it is applied to the axial direction, then the two above mentioned
forces are equal. Therefore, top bolts must resist to the tensile force, while
compression is assumed to be transferred through the contact of the end
plate to the lower flange of the beam.

Page 108
A large number of other node components, may limit the resistance
of the joint. Each of them must be separately investigated and in case it is
insufficient, it must be reinforced (using metal plates, depending on the
case), as discussed thereafter. Regarding the joint examined, the following
node components can be distinguished, both in topology terms and in
terms of their loading (also ref. figure 6.9).
Figure 6.9. Node components

Page 109
Loading type Point Required controls
Tensioning a Bolt tensioning
b End plate bending
c Bending of column footing
d Beam body tensioning
e Column body tensioning
f Welding between beam flange - plate
g Welding between beam body-plate
Horizontal shearing h Column body under shearing
Compression j Beam flange compression
k Welding of beam flange
L Column body under intrados compression
m Buckling of column body
Vertical shearing n Welding between beam body-plate
p Bolt under shearing
q Bolting under intrados compression Table 6.1 Stressing of joint areas
Column body is subjected to accumulated loads in the tensile and
compressive zones; it can be controlled using empirical methods which
determine an active area on the body. Buckling must be controlled - among
others - in the compression zone. Adjacent structural elements provide lateral assurance so that
buckling length of the compressed part of the joint is equal to 0.7 times the
body width. Shearing of column body can become significant, especially under
unilateral node layout or in a laterally non-shifting frame. On the contrary, if
2 beams converge from opposite sides of the column on a fixed frame, the
quantities transferred out of two beams may be in equilibrium, thus the
column body will not be subject to significant stress. Therefore, depending
on the frame type, this element may be (or may not be) critical.

Page 110
In most cases a plastic distribution over bolted nodes is assumed,
however elastic or elastoplastic distribution can be also implemented.
Regarding elastic distribution, forces over bolt rows are derived from tensile
resistance of the upper row of bolts. Bolt forces must be checked to confirm
that exceeding of resistance does not occur at any position. When elastic distribution is assumed, a shearing force is
transferred from all bolts; checks for shearing - tension contribution is then required. In this case, tensile force of the bolt shall include the increase due
to the lever effect of bolts. During elastoplastic and plastic distribution,
shearing force is determined from bolt rows that cannot convey bending
torque. Alternatively, it may be assumed as combination of tension and
shearing. Tensile strength of a single row of bolts is calculated from column
flange under bending Ft.fc.Rd, from the column body under tension Ft.wc.Rd,
from edge plates under bending Ft.ep.Rd and from column body under
tension Ft.wb.Rd. Overall resistance of components under shearing and compression is the minimum between column body frame under shearing Vwp,Rd/ β, of column body under compression Fc,wc.Rd and of beam flange under compression Fc,fb.Rd. Conversion coefficient β is used to calculate frame stiffness of column body, as this is subject to shearing stress on the
left and right side of the node. Regarding nodes with two or more bolt rows, resistance of the
group of bolts of adjacent rows must be taken into account. When plastic distribution of forces on bolted nodes is assumed, resistance
of a single row of bolts shall be calculated according to 1.9 Βt.Rd in order to ensure sufficient deformation capacity. When the ability to develop plastic articulation on nodes is required, strain hardening effects may lead to overloading of welds. In this case, welds shall be designed so as to
undertake bending torques increased to 1,4 Mj.Rd for linked elements and
1,7 Mj.Rd for non-linked elements.

Page 111
6.1.6.2 Calculation of initial joint stiffness
The component method may be used for calculating initial stiffness
of a node Sj.ini. Stiffness can be calculated by adding elastic deformations
of each of connection components. Using rigidity coefficient of the
component (k), deformation δ is equal to:
where F is the force on component i and Ε is the modulus of elasticity.
Node rotation can be calculated from components' deformation
taking into account the length of the arm between tension and compression
zones:
Using formula 7.8, the node stiffness can be calculated as follows:
When the above mentioned formula is converted to the following
expression:
the full torque-rotation graph can be calculated in straightforward manner.
Regarding column - beam nodes and continuity of beams, a linear elastic
behavior can be adopted, equal to 2/3 of the node's bending torque
resistance. Factor μ that expresses the proportion of the initial stiffness to
the string stiffness (shearing stiffness), is equal to one in the elastic phase
and greater than one in the elastoplastic segment of the graph, i.e. equal
to:

Page 112
Form factor ψ is equal to 2.7 for welded nodes and bolted edge
plates, and 3.1 for bolted flange plates.
The effective stiffness factor, keff of each bolt row under tensioning
shall be calculated according to formula:
where k, are the stiffness factors of the main components that correspond
to the particular row of bolts. These commonly are: the flexible column body
under tensioning, the column flange under bending, the bolts under
tensioning and the end plates under bending. For joints of end plates with two or more bolt rows under
tensioning, the main components from all bolt rows are represented by an
equivalent rigidity coefficient, keq, determined according to the formula:
The equivalent lever arm shall be determined according to the formula:

Page 113
6.1.6.3 Required rotational capability
The required rotational capability of nodes depends upon the
structure type; it rarely exceeds 60 mrad. When the component method is employed, the end plate under bending and the frame of the column body
under shearing represent ductile components. The bolt subject to tensile and shearing forces, as well as the welds, are common examples of brittle components. For this purpose, it is recommended to avoid designing bolts
and welds that determine the strength of the joints. Prediction models allow a distinction between plastic nodes from brittle ones as well as hazardous
solutions, not only regarding design assumptions, but also regarding behavior description.
Torque
Experimental plot
Bilinear model
Rotation capacity
in plastic zone
Rotation
Figure 6.10. Rotation capacity, design resistance limit due to brittle failure
of the second row of bolts at a beam - column joint
6.1.7 The concept of the equivalent T-stub
Bending of a plate is a complex, three-dimensional problem in
nature. To address this problem, Eurocode has introduced the "equivalent
T-stub" concept. Semi - empirical formulae provide the T-stub length which is
aligned to the actual conditions of yield lines for a single or multiple rows of
bolts. The abovementioned 3 types of failure can be represented in a
very simple manner in figure 6.11.

Page 114
Regarding the first mechanism, "double bending" is observed close
to the bolts and at the joint with the T-stub body. The second mechanism combines bolt yield with a simple yield plot at the joining point between the
flange and the body. Bolts are critical in mechanism 3, thus the failure pattern is only relevant to their yield. It is worth mentioning that only mechanism 3 utilizes the full strength of the bolts; regarding the other two
mechanisms, part of their strength is utilized to counteract contact forces Q.
In 1st
failure pattern, only 70% of the bolts' tensile strength is available.
Thin plate,
strong bolts
Thick plate,
weak bolts
Bolt tensile
strength
Figure 6.11. T-stub failure mechanisms

Page 115
6.1.7.1 Multiple bolt rows
The process becomes more complex in cases of multiple bolt rows at close spacing, which interact in undertaking tensile forces. It is worth noting that a pair of rows will assume less than twice the force a single row would undertake. EC3 stipulates that outer bolt rows (above beam flange) are of key importance; due to their increased lever action, they will assume torques in a much more effective manner. This can be best understood if the calculation procedure is described. Resistance of the outer row is calculated as if the other bolt rows under tension are non - existent. The second row under tension shall assume a force resulting from the strength of rows 1 and 2 as these are assumed to be a bolt group, minus the minimum strength of row 1 or 2 assumed to be single rows etc., and assuming all possible bolt group combinations. The presence of reinforcement plates will restrict the number of rows whose forms of failure (curved yield) are combined.
At the end of this process, a column-type vector is determined, with all bolts force metrics. Clearly these can be restricted by a different component of the joint, dependent upon which component is considered to be critical. Commonly, column body is the critical component. Eventually,
strength torque of the joint is calculated as S [Fti hi] where Fti is the force of
the row of bolts i and hi its lever arm, taken from the centre of compression, which is initially assumed to be the bottom flange of the beam.
It must be stressed that this calculation formula is based on plastic distribution of bolts' forces; this fact requires that the node is capable of
developing sufficient rotation, until joint T-stubs assume their full strength.
As thickness values of the end plate and beam flange increase, the above
mentioned control of rotation capacity becomes less meaningful, as bolts
tend to become critical under such conditions and the footings of the respective T-stubs obtain much higher stiffness rates.
Furthermore, an alternative process based on triangular distribution
of bolts' forces can be considered. Then, the lever arm would determine the amount of force assumed
by each row of bolts under tension, while footing thickness values for end
plate columns would not influence the calculation in any way. The use of
such a distribution in full strength joints is prohibited; therefore no further
reference to it will be made.

Page 116
6.1.8 T-stubs pattern on end plate
Bolts under
tensile force
Bolts only
under
shearing
Figure 6.12 a) End plate with 4 bolts in row, b) separation into T-stubs ,
c) division of top bolt rows in separate T-stubs
Bolts a1-a4 and b1-b4 near beam flange under tension, can be
taken for bending torque resistance calculation, ref. figure 6.12. The bolts
c2 and c3 could also be considered. However the bolts c1 and c4 can not
be considered for the transfer of tension due to the limited stiffness of the
end plate. These bolts together with the bolt row d could be useful as
regards shearing. Depending on the size of the end plate and bolt spacing, there are
several possibilities for yield line patterns for bolts in rows a and b. The
expected formation of yield lines at the extension of the joining plate is
shown in figure 6.13. Bolts b1 and b4 are expected to present similar yield
lines.
Figure 6.13. Expected formation of yield lines at the extension of the connecting plate

Page 117
6.1.9 Transfer of tensile forces
Many details are available regarding the calculation of tensile
forces distribution on bolts; these are fully addressed in EC3, part 1.8. The
basic tensile forces transfer mechanism to bolts has been referred to in an
introductory chapter, taking into account the deformability of the flange or of
the end plate depending on the case. The strength of a row of bolts that may lead to failure conditions will
be possibly restricted either by the bolts - carrying plate, or by strength of
bolts, or by a combination thereof (a total of 3 forms of failure ). In case the
end plate or the flange, respectively, is thin, then they shall be deformed
due to bending. If they are thick, then the bolt will fail prior to yielding of the
plate or the flange. In conditions where the thickness of the plate / flange obtains intermediate values, then the failure mechanism is complex and will
result from a combination of the two independent factors mentioned above. Regarding the tensile force of the beam flange, this will spread in the body
over a length equal to beff.

Page 118
Welded node End plate with 2 bolt rows*
Figure 6.14. Effective length of column body zone under tensile force
It is assumed that under the ultimate failure condition, when part of the
body with a length of beff yields. Then tensile force Ft will become:
Respectively, for a welded joint, the same effective width beff, is
used, both in the tensioned and the compressed zone, despite the
experimental results that have shown that this is often longer in the zone
under tensioning. For bolted connections, the effective length of the T-stub of column
body under tensile force is considered to be equal to the overall effective
length of equivalent T-stubs. The column body can be reinforced either by
flange reinforcing plates, or by plates welded on both sides of the column
body (figure 6.15).

Page 119
Figure 6.15. Reinforcement using body plates
6.1.9.1 Possibilities to reinforce column flange
6.1.9.1.1 Reinforcement with transverse reinforcement plates
In contrast to welded joints, bolted joints can be locally reinforced
by plates located on the column, so that the force can be directly
transferred by the beam flange to the column body, without any bending
taking place.
Figure 6.16 Reinforcement column flange

Page 120
In case plates are used as in figure 6.16, the stiffness and strength
of column flange will increase; a fact which is beneficial to the strength of the row of bolts adjacent to the rib. The strength of such rows can be
calculated by introducing an equivalent T-stub with equivalent length of ?eff
= α m1 where the value of coefficient α is taken from figure 6.17, formulated both according to the plasticity theory and the experimental results. This value will depend upon the geometry next to the reinforcing plate.
Figure 6.17 Coefficient α to calculate T-stub effective length of a row of bolts
adjacent to column rib
6.1.9.1.2 Reinforcement with plates parallel to a
flange (backing plates)
In a corresponding manner, it is possible to reinforce column flange
with plates bolted upon the former. Selection of length lbp of plates must be
emphasized; it is recommended to be taken as equal to effective length ?eff

Page 121
of the equivalent T-stub of bolts. Thus, plastic torque Mpa is increased, not
Mpb in figure 6.19, therefore such reinforcement is efficient only when
failure mechanism 1 is critical (only end plate is critical).
flange plate
Figure 6.18 Reinforcement column flange with backing plates
Figure 6.19 Increase of Mpa with column flange plates

Page 122
6.1.10 Transfer of compressive forces
The compressive force on a non-reinforced column body may cause local buckling. Following performance of experiments on column-beam joints, the following determination model has been adopted. The assumption made is that buckling starts when the average stress over a
section whose effective width is equal to beff becomes equal to the yield
stress. This model is essentially the same as the one used for the transfer of tensile forces to the column body. The ultimate compressive force results as follows:
Figure 6.20 Effective width of column body under compressive force
The following are various variations of the geometry of the joint. It
is noted that imaginary lines that determine the value of effective width, are
inclined by 2.5:1 within the thickness of the flange of column and 1:1 within
other elements of the joint.

Page 123
Figure 6.21 Effective length of the compressed part of the joint on column body
In case b, as shown in figure 6.21, it is assumed that the end plate under the beam flange will yield before buckling occurs in the column body.
In this case, compressive force Fc is spread throughout the entire end plate

Page 124
thickness.
Figure 6.22 Behavior of compressed joining zone with projecting end plate
The following must apply for the projection of end plate le :
In case the last formula is not met, then the lowest part of the end
plate becomes plastic and the effective width is decreased to take the
following value:
However, the lever arm between the compression and tension
centers will increase, even marginally; this is considered an advantage (in
other words, the center of compression does not precisely coincide with the
lower beam flange). In case of significant axial forces in the column, the critical load in
the compressed zone will decrease. As long as regular tension sn is less
than value 0,5 fy, their influence can be ignored. For even higher stresses
sn, design strength of the compressed part of the joint shall be calculated

Page 125
according to the formula:

Page 126
where R is a reduction factor considered to be . The column
can be also reinforced in the compressed zone with reinforcement plates between flanges or by plates welded on its body.
6.1.11 Transfer of shearing forces
On asymmetric joints, e.g. on perimeter columns, column body is
also loaded with a shearing force, Fv. This may also happen on symmetric
joints loaded in an asymmetric manner. For example, in the following joint, tensile force to the upper flange must be transferred through the shear panel formed; then it will counteract the respective compressive force of the lower flange of the beam.
Figure 6.23 Shearing stresses developed on a column with reinforced flanges (asymmetric
node)

Page 127
Assuming that geometry of the column body will not permit buckling
due to the shearing force, the shearing strength of the panel will be equal
to:
Column body could be reinforced by diagonal plates or plates
welded thereupon. When the first solution is selected, care must be taken
so that bolt placement problems are avoided.
Figure 6.24 Reinforcement of column body against shearing
Care must be taken in cases as the following, where
implementation of such reinforcements may entail undesirable results
regarding the resulting stress condition. A similar example is shown in
figure 6.25.

Page 128
Tensile force zone Compression zone
With reinforcement Without reinforcement
Figure 6.25 Reinforcement of top node (stress condition in the panel will change)
6.1.11.1 Bolt shearing forces
Generally, force distribution over bolts must be selected in an
optimal manner. Thus it is possible to uniformly distribute shearing force
over the bolts. In this case, the bolts must be checked according to the
applicable rules for combined shearing / tension, i.e.:
In formula (6.23), tensile force Ft,Rd is the tensile resistance of each
bolt, as resulting from solving the joint, thus formula (6.25) will result.
Moreover, the shearing force is usually distributed over the compressed
part of the node. If the load-bearing capacity of these bolts is sufficient,
then the other bolts are merely tested as regards tensile strength. In
addition, and in order to allow sufficient deformation capacity, it is important
that bolts resistance to shearing is greater than their resistance under
intrados compression, either on the plate or on the column flange.

Page 129
Distribution of shearing Equivalent shearing force on non-tensioned force on each bolt bolts
Figure 6.26 Example of shearing force distribution on bolt rows
6.2 Detailed joint calculation
This section will provide the detailed solution of the particular joint,
so that the results can be compared with the ones obtained from the
previous calculation routine. Thus, the following characteristic joint example is selected and
thereafter all tests carried out are presented. Assume a column with ΗΕΒ300 section size and a ΙΡΕ 200 beam. Beam cross section will increase at the area of the joint, using a column of equivalent beam cross section, truncated at its upper flange. At the point of connection of the support beam flanges, a reinforcement of beam body is employed, to increase the resistance of the body against second order effects. Column flanges are also reinforced by reinforcing ribs at the compression center area (lowest flange of the beam), as well as in the area of the upper flange of the beam. A pair of ribs is used, to form a panel on column body; the latter is intended to receive the shearing force thereupon. Furthermore, reinforcement plates are also placed on both sides of column body to increase both its shearing resistance and its rotation stiffness as well. Finally, tensile force zone of the flange shall be reinforced by plates placed locally at the back of its flange (backing plates).
It is noted that the present example utilizes all possible
reinforcements of a node of this type, to provide a comprehensive
presentation of the Eurocode method and also to demonstrate the
capabilities of the software developed with respect to handling a torque
node between beam-column. In the following, relevant drawings of the joint will be shown, to
enable understanding of its geometry. It is reminded that all dimensions are
in kN, mm, unless specified otherwise. The steel used is S235 grade for all

Page 130
members and joining media. Furthermore, bolts are Μ20 / 8.8 and holes
are regular (22 mm). All weldings are fillet welds with the following
thickness values: • Between beam flange and end plate: 5 mm • Between beam body and end plate: 3 mm • Between column body and column reinforcement plates: 6 mm • Between column body and beam flange: 3 mm
It is reminded that thickness of transverse ribs is at minimum equal to
the flange of the member intended for reinforcement, therefore column ribs
(reinforcements) are selected so as to have a thickness of 20 mm, and 10
mm for the beam.
Figure 6.27 Stress quantities acting on the node under examination

Page 131
local reinforcement plate in the
tensioned zone 340/120/20
end plate 550/250/20
beam rib
column
flange ribs
section of ΙPE200
reinforcement plates on both
sides of 800/220/15 body
Figure 6.28 Joint front view

Page 132
Figure 6.29 Joint side view
Figure 6.30 Joint plan view

Page 133
6.2.1 Spacing check
6.2.1.1 Bolt spacing check Regarding bolts on the end plate:
6.2.1.2 Spacing check of reinforcement plates column body The following apply to reinforcement plates of the column body:
According to paragraph 6.2.6.1 (9) (prEN 1993-1-8), the width of plates, bs,
shall be sufficient so that the body reinforcement plate extends at least to the root of the mounting radius, thus for a malleable cross section, the check shall be performed in the following manner:
where run is the mounting radius of the column cross-section.
Correspondingly, the maximum width of plates is equal to
Furthermore column body thickness must be less than or equal to the plate
thickness, i.e.:

Page 134
6.2.1.3 Spacing check of column flange reinforcement plates
Regarding the plates used for local reinforcement of the flange of
the column (backing plates) the following shall apply:
Additionally :
In this particular case:
Figure 6.31 Determination of extreme dimensions for plates used for local
reinforcement of the tensioned zone (backing plates)

Page 135
6.2.1.4 Check of beam column angle
Regarding the beam column, specifically the angle between
column beam flanges, γ, the following shall apply:
6.2.1.5 Check of weldings Regarding weldings between joining media the following apply:
Welding thickness between beam flange and end plate: a = 5mm<max a = 0.7x8.5 = 5.95mm Welding thickness between beam body and end plate:
a = 3mm<max a = 0.7x5.6 = 3.92mm Welding thickness between column body plates and column body:
α = 6 mm < max α = 0.7 χ 11 = 7.7 mm Welding thickness between beam-column and beam flange:
α = 3 mm < max α = 0.7 x 5.6 = 3.92 mm
6.2.2 Initial calculations and estimation of general joining parameters
6.2.2.1 Values of transformation parameter Β
The following shall apply with respect to transformation parameter β:
6.2.2.2 Column shearing surface
It is calculated for a ductile column cross-section, according to the
following formula as proposed in EC3, part 1.1, paragraph 6.2.6 (3):
According to paragraph 6.2.6.1 (6) (prEN 1993-1-8), the shearing surface
may be increased by bstwc, due to the use of body reinforcement plates,
where bs, twc, are the width and thickness of reinforcing plate and column body respectively.

Page 136
Thus the shearing surface becomes:
6.2.2.3 Calculation of effective width of the column body
under compression
According to paragraph 6.2.6.2 (1) (prEN 1993-1-8), for bolted
connection to the end plate, the effective length of the column body under
compression is:
where sp is the length resulting from a projection under 45° through the end
plate (at least t,, and up to 2tp, provided that the section of the end plate close to the flange is sufficient). In particular, sp = 40 mm, hence: beffcwc = 293.96 mm, where tn is the thickness of the column flange, as it is assumed that the centre of compression of the joint is located in the column
flange.
6.2.2.4 Reduction coefficient ω to account for interference
between compression and shearing
According to table 6.3 it is derived that:
and
6.2.3 Solution of joint
6.2.3.1 Finding stiffness coefficients of joint elements

Page 137
6.2.3.1.1 Pre-assessment of number of tensioned bolt rows
This will be arbitrary, taken as equal to the number of bolts located
above the bottom flange of beam cross section, i.e. 4. Thereafter, stiffness factors k1, k2, k3, k 4, k5, k10, shall be
calculated according to table 6.10 (prEN 1993-1-8). Of the above mentioned coefficients, all but the first two refer to bending of the end plate- flange or to tensioning of bolts and column body, thus they must be calculated separately for each row of bolts under tensioning conditions. On
the other hand, stiffness factors k1, k2 referring to the column flange under shearing and under compression, can be calculated irrespectively of the rows of bolts.
6.2.3.1.2 Stiffness coefficients for the first row of
bolts under tensioning
Stiffness coefficient ka (column body under tensioning):
According to table 6.11 (prEN 1993-1-8) parameter befftwc is taken
to be the effective width of column body under tensioning from 6.2.6.3 (prEN 1993-1-8). For a node with one row of bolts under tensioning, beff,t,wc must be taken equal to less than the effective lengths ?eff (individually or as member of a group of rows of bolts) as given for the particular row of bolts
in Table 6.4 (prEN 1993-1-8) (non-reinforced column flange) or in Table 6.5
(prEN 1993-1-8) (reinforced column flange). Instructions for calculating the effective length of the equivalent T-stub, are
provided in table 6.4 (prEN 1993-1-8), since this is a row not adjacent to a
column reinforcement structure (rib). Distances defined in the above
mentioned table refer to the particular row: m = 17.90 mm
m2 = 36.61mm e
= 80.00 mm e1 =
390.00 mm c =
45.00 mm
The above is an edge row of bolts, therefore effective length shall
be derived from these formulae:
An upper ceiling exists, thus effective lengths are ignored under the
condition:

Page 138
• The row of bolts is assumed to be individual
ο For circular patterns:
ο For non - circular patterns:
• The row of bolts is assumed to be member of a group of rows of
bolts.
ο For circular patterns:
ο For non - circular patterns:
Minimum effective length is equal to 112.47 mm; this constitutes the
effective length of the first row of bolts for the column body under tensile
force.
Thus, stiffness coefficient k3 shall be equal to:
where dc = hc 2tfc = 283.00 mm (6.44)
Stiffness coefficient k, (column flange under bending force): Table 6.11 yields:
where length is equal to effective length calculated above, i.e. 112.47 mm. Distance m is defined in accordance with figure 6.8 (prEN 1993-1-8)
and is equal to m = 17.90 mm. Thus, coefficient k4 will become:

Page 139
Stiffness coefficient k5 (end plate under bending force, one row):
The effective length needed to calculate coefficient k 5 will be
derived from table 6.6 (prEN 1993-1-8). The distances defined in this table
for this particular row are: m = 38.81 mm
mx = 34.34 mm
e = 80.00 mm
ex = 40.00 mm
c = 45.00mm w
= 90.00 mm This constitutes a row of bolts within the beam flange under tensioning,
therefore the effective length shall be derived from the following formulae:
• The row of bolts is assumed to be individual ο For circular patterns:
ο For non - circular patterns:
• The row of bolts is assumed to be member of a group of rows
of bolts.
It is not necessary to assume that the row belongs to a group.
Minimum effective length is equal to 125.00 mm; this constitutes the
effective length of the first row of bolts for the end plate under bending.
Thus, stiffness coefficient κ5 shall be equal to:
Stiffness coefficient k10 (bolts under tensioning, single row of bolts):
For the calculation of this coefficient, value Lb (constituting the
deformable bolt length, which is assumed to be equal to the retaining length - total thickness of metal and washer) is required, plus half of the sum of the thickness of bolt head and washer. Regarding geometry of the
particular joint, it is derived that Lb = 61.95 mm, hence:

Page 140
where As is the effective surface of a single bolt.
For the examined row (1st
), effective stiffness coefficient keff,r, is
calculated according to the formula:
where ί = 3,4, 5,10. (6.51)
6.2.3.1.3 Stiffness coefficients for the second row of
bolts under tensioning
Stiffness coefficient k3 (column body under tensioning):
Instructions for calculating the effective length of the equivalent T-
stub, are provided in table 6.5 (prEN 1993-1-8), as this is a row located
adjacent to a column reinforcement structure. The distances specified in
table 6.5 for this particular row, are as follows:
m = 17.90 mm
m2 = 36.61mm
e = 80.00 mm
e1 = 460.00 mm
c = 45.00 mm
There is an upper ceiling, thus effective lengths under component
e1 are ignored. Coefficient α from figure 6.11 shall be calculated after
solving for values λ1 and λ2.
and
thus the resulting value of α shall be equal to 8.0.

Page 141
• The row of bolts is assumed to be individual
ο For circular patterns:
ο For non - circular patterns:
• The row of bolts is assumed to be member of a group of rows
of bolts
ο For circular patterns:
ο For non - circular patterns:
Minimum effective length is equal to 97.02 mm, and this constitutes the
effective length of the first row of bolts for the column body under
tensioning.
Thus, stiffness coefficient k3 shall be equal to:
where dc = hc 2tfC = 283.00 mm (6.58)
Stiffness coefficient k4 (column flange under bending):
Table 6.11 yields:
where length is equal to effective length as calculated above, i.e. equal to 97.02 mm. Distance m shall be derived in accordance with figure
6.8 (prEN 1993-1- 8) and is equal to m = 17.90 mm. Thus, k4 coefficient will
become equal to:

Page 142
Stiffness coefficient k5 (end plate under bending, one row):
The effective length required to calculate k5 coefficient shall be
derived from table 6.6 (prEN 1993-1-8). The distances defined in this table
are as follows for this particular row: m = 38.81 mm
mx = 34.34 mm
e = 80.00 mm
ex = 40.00 mm
c = 45.00 mm w
= 90.00mm This is a row of bolts outside the beam flange under tensioning, therefore
the effective length shall be derived from these formulae: • The row of bolts is assumed to be individual ο For circular patterns:
ο For non - circular patterns:
• The row of bolts is assumed to be member of a group of rows
of bolts.
No need to assume that this row is a member of a group
Minimum effective length shall be equal to 125.00 mm, and this
constitutes the effective length of the first row of bolts for the end plate
under bending.
Thus, stiffness coefficient k5 shall be equal to:
Stiffness coefficient k10 (bolts under tensioning, a single row of bolts):
According to the above calculation it is derived that Lb = 61.95 mm,
therefore:
where Α5 is the effective surface of a single bolt.

Page 143
For the examined row (2nd
), the effective stiffness coefficient keff,r, shall be
calculated according to the formula:
where i = 3,4, 5,10. (6.65)
6.2.3.1.4 Stiffness coefficients for the third row of
bolts under tensioning
Stiffness coefficient k3 (column body under tensioning):
Instructions for calculating the effective length of the equivalent T-
stub, are provided in table 6.5 (prEN 1993-1-8), as this refers to a row
located adjacent to a column reinforcement structure. The distances
specified in table 6.5 (prEN 1993-1-8) for this particular row, are: m = 17.90 mm
m2 = 36.61mm e
= 80.00 mm e1 =
548.50 mm c =
45.00 mm
There is an upper ceiling, therefore the effective lengths under e1
component are ignored. Coefficient α from figure 6.11 (prEN 1993-1-8)
shall be calculated after solving for λ1 and λ2 values.
and
and the resulting value of a α is equal to 8.0.

Page 144
• The row of bolts is assumed to be individual
ο For circular patterns:
ο For non - circular patterns:
• The row of bolts is assumed to be member of a group of rows
of bolts
ο For circular patterns:
ο For non - circular patterns:
Minimum effective length is equal to 105.27 mm, where this constitutes
the effective length of the first row of bolts for the column body under
tensioning.
Thus, stiffness coefficient k3 shall be equal to:
where
Stiffness coefficient k4 (column flange under bending): Table 6.11 yields:
where length £en is equal to the effective length as calculated above, i.e.
105.27 mm. Distance m shall be determined in accordance with figure 6.8
(prEN 1993-1-8) and is equal to m = 17.90 mm. Thus, coefficient k4 will
become:
Stiffness coefficient k5 (end plate under bending force, one row):
The effective length required to calculate coefficient k5 shall be derived
from table 6.6 (prEN 1993-1-8). The distances defined in this table for this
particular row are as follows:

Page 145
m = 38.81 mm
mx = 34.34 mm
e = 80.00 mm
ex = 40.00 mm
c = 45.00mm w
= 90.00 mm This is the first row of bolts underneath the beam flange subjected to
tensioning; therefore the effective length shall be derived from the following
formulae:
and
• The row of bolts is assumed to be individual ο For circular patterns:
ο For non - circular patterns:
• The row of bolts is assumed to be member of a group of rows of bolts
ο For circular patterns:
ο For non - circular patterns:
Minimum effective length is equal to 217.66 mm and this constitutes the
effective length of the first row of bolts for the end plate under bending.
Thus, stiffness coefficient κ5 shall be equal to:
Stiffness coefficient k10 (bolts under tensioning, single row of bolts):
According to the above calculation it is derived that Lb = 61.95 mm,
therefore:

Page 146
where Α5 is the effective surface of a single bolt.
For the examined row (2nd
), effective stiffness coefficient keff,r, shall
be calculated according to the formula:
where i = 3,4, 5,10. (6.83)
6.2.3.1.5 Stiffness coefficients for the fourth row of bolts
under tensioning
Stiffness coefficient k3 (column body under tensile force):
Instructions for calculating the effective length of the equivalent T-
stub are provided in table 6.4 (prEN 1993-1-8), as this refers to a row not
adjacent to a column reinforcement structure. The applicable distances as
specified in table 6.4 (prEN 1993-1-8) for this particular row are: m = 17.90 mm
m2 = 36.61mm e
= 80.00 mm e1 =
651.50 mm c =
45.00 mm There is an upper ceiling, thus effective lengths are ignored under the
condition e1:
• The row of bolts is assumed to be individual ο For circular patterns:
ο For non - circular patterns:
• The row of bolts is assumed to be member of a group of rows of bolts
ο For circular patterns:

Page 147
ο For non - circular patterns:
Minimum effective length is equal to 112.47 mm; this constitutes the
effective length of the first row of bolts for the column body under
tensioning.
Thus, stiffness coefficient κ3 shall be equal to:
where dc=hc 2tfC= 283.00 mm (6.88)
Stiffness coefficient kA (column flange under bending force): Table 6.11 (prEN 1993-1-8) yields:
where length eff is equal to the effective length as calculated above, i.e.
112.47 mm. Distance m shall be specified in accordance with figure 6.8
(prEN 1993-1-8), being equal to m = 17.90 mm. Thus, coefficient κ4 will
become:
Stiffness coefficient k5 (end plate under bending, one row):
The effective length required to calculate coefficient k5, shall be derived
from table 6.6 (prEN 1993-1-8). The distances defined in this table for this
particular row are: m = 38.81 mm
mx = 34.34 mm
e = 80.00 mm
ex = 40.00 mm
c = 45.00 mm This constitutes an internal row of bolts close to the beam flange, therefore
the effective length shall be derived from the following formulae:

Page 148
and
• The row of bolts is assumed to be individual ο
For circular patterns:
ο For non - circular patterns:
• The row of bolts is assumed to be member of a group of rows
of bolts ο For non - circular patterns:
ο For circular patterns:
Minimum effective length is equal to 230.73 mm; this constitutes the
effective length of the first row of bolts for the end plate under bending.
Thus, stiffness coefficient k5 shall be equal to:
Stiffness coefficient k10 (bolts under tensioning, single row of bolts):
According to the above calculation, it is derived that Lb = 61.95
mm, therefore:
where A5 is the effective surface of a single bolt.
For the examined row (i.e. 2nd
), effective stiffness coefficient keff,r, shall be
calculated according to the formula:
where i = 3,4,5,10. (6.99)

Page 149
6.2.3.1.6 Calculation of equivalent stiffness coefficient keq
The equivalent lever arm of joint zeq, is derived according to the
formula specified in paragraph 6.3.3.1 (3) (prEN 1993-1-8):
where r is each tensioned row (r = 1, 2, 3, 4) and hr is the distance of each
individual row from the centre of compression of the joint. It is concluded
that zeq = 375.36 mm.
Thereafter, the equivalent stiffness coefficient is calculated as follows:
6.2.3.1.7 Miscellaneous stiffness factors of the joint
The only thing remaining to do is to calculate stiffness factors k1
and k2 of the joint, referring to column flange under shearing and
compression respectively; nevertheless these will be needed at a later stage, for calculation of the rotation stiffness of the said node. Coefficient k1 is assumed to be infinite, as the node is assumed to be reinforced due to the existence of ribs on the column.
In similar manner, coefficient k2 k1 is also assumed to be infinite, as the
column of the node includes a reinforcing rib close to the compressible beam flange, as well as at the reinforcement plates of the column body.
6.2.3.2 Finding of strength values for the main components of the joint
6.2.3.2.1 Column body under shearing
Paragraph 6.2.6.1 (prEN 1993-1-8) shall apply. A condition is that
the following inequality is valid:

Page 150
Where . In fact The design shearing strength of the non - reinforced body is provided by
the following formula:
where Avc is the increased shearing surface of column cross section, due to
the existence of body reinforcement plates. According to paragraph 6.2.6.1 (4) (prEN 1993-1-8), when transverse ribs are simultaneously used in the tensile and compressed zone, design plastic
shearing resistance of the column body Vwp,Rd can be increased by
Vwp,add,Rd as follows:
however where:
ds is the distance between the gravity center lines of ribs VΡl,Fc,Rd is the design plastic bending resistance of the column
flange Vwp,add,Rd is the design plastic bending resistance of the rib In particular:
hence

Page 151
The resulting transformation coefficient β is equal to one, therefore
reduction of the above mentioned shearing force resistance is not
necessary.
6.2.3.2.2 Column body under compression
Coefficients ω and β used in chapter 6.2.6.2 have been already
calculated. The design compression strength of the column shall be
calculated according to the formula:
however
As reinforcement plates are used on the column body, column body thickness can be set to twice its value in the above mentioned formula. According to paragraph 6.2.6.2 (2) (prEN 1993-1-8), when
maximum longitudinal compressive stress ocomEd exceeds 0.7fywc on the
body (due to axial force and bending torque on the column) (next to the mounting radius for a ductile cross section, or on the root weld for e weld joint), its impact on the design compression strength of the column body must be taken into account by multiplying the value of FcwcRd supplied in formula 6.9 (prEN 1993-1-8) applying a reduction coefficient kwc, the latter is defined as follows:
• when
• when For this particular case:
thus kwc = 1.

Page 152
Regarding the reduction coefficient ρ for plate buckling we have:
• for < 0,72: ρ = 1,0
• for > 0,72:
where η is its specific buckling capacity, as supplied by the following
formula:
with
for a column with ductile cross section
Compression resistance of the column can be increased due to the
existence of a compressed rib on the column, by:
Therefore:
6.2.3.2.3 Body and beam flange under compression
The required resistance of beam flange shall be derived from
chapter 6.2.6.7 (prEN 1993-1-8). Special attention must be given to the
presence of the column as well, since the latter is located within the
compressed area of the node. Calculation of the strength of the column under body and flange
compression, shall be performed initially. Shearing strength is :
thus reduction of strength torque of the column cross section - due to
interference with the shearing force - is not necessary. Thus, strength torque will become:

Page 153
and the requested column strength is:
Regarding beam resistance, it shall be calculated in a similar
manner to the calculation of column strength under compression, however
it shall be increased by , due to the existence of the rib on the
beam. While bst and tst are the width and thickness of the reinforcing plate
of the beam, respectively. Eventually, the resulting strength value shall be equal to 359.96 kΝ > 337.39 kN, therefore to enhance safety, the compressive strength for body and flange of the composite beam cross section due to the column, is considered to be 337.39 kN.
6.2.3.3 Iterative process for finding the number of rows under
tensioning
This section will employ the iterative process presented in
paragraph 6.3.2 (general flow diagram), to find the number of rows of bolts under tensioning. Partial bolt rows shall be regarded as individual or group
members in order to find their critical tensile resistance load. The iterative process shall commence from the top row of bolts and shall stop when a
row with negative strength is found. It is noted that (as repeatedly noted before), the plastic method for the determination of node strength values is implemented; this fact will detach this examination from the magnitude and
direction of actions effected on the node.
Rows considered to be individual:
• 1st
row of bolts: οColumn body under tensioning
According to paragraph 6.2.6.3 (3) (prEN 1993-1-8), on a bolted connection, the effective width beff,t,wc of the column body under tensioning must be taken as equal to the effective length of an equivalent T-stub corresponding to the column flange. The row in question is not adjacent to a rib, therefore the required effective
lengths will be derived from table 6.4. Furthermore, and since it is assumed
that an upper ceiling exists, the effective lengths shall be equal to:

Page 154
Regarding distance values m, e, it follows that:
m = 32 mm and e = 80 mm According to table 6.2, we have:
Furthermore, the plastic torques developed on the equivalent T-stub of the
flange are:
Due to the existence of local reinforcement of the column flange, the
resistance force shall be:
where η = 40.75 mm
The required strength is provided by the following formula:
where
It is eventually found that o Column flange under bending

Page 155
The examined row is not adjacent to a rib, therefore the effective length of
the equivalent T-stub for bending of the column flange is provided by the
following formulae:
where η = 40.75 mm
and ο End plate under bending
The effective lengths for the end plate under bending and for a row above
the flange under tensioning are provided by the formulae:

Page 156
and
ο Beam body under tensioning According to paragraph 6.2.6.8 (prEN 1993-1-8), the effective length is
equal to the one mentioned above since it is considered that that the T-stub
developed is equal to the one found in the case of the end plate under
bending. Strength is calculated as follows
Critical failure mechanism for 1st
row of bolts assumed to be individual:
Beam body under tensioning with FT = 164.50 kΝ
• 2nd
row of bolts: οColumn body under tensioning
The row is adjacent to a rib, therefore the required effective lengths may be inferred from table 6.5 (prEN 1993-1-8). The value of parameter α as
inferred from figure 6.11 (prEN 1993-1-8), is equal to 7.71 for λ1 = 0.29 and
λ2 = 0.39. The effective lengths are determined as follows:

Page 157
According to table 6.2 it follows that:
Furthermore, the plastic torques developed on the equivalent T-stub of the
flange are:
Due to the existence of a local reinforcement on the column flange, the
following shall apply for the resistance force:
The required strength is provided by the following formula:
where Eventually, it follows that
ο Column flange under bending
The effective length is equal to the value calculated above, =
251.28. Furthermore Fb = 141.12 kΝ, therefore
ο End plate under bending Effective lengths for the end plate under bending and for a row of bolts
above the flange under tensioning, are provided by formulae:

Page 158
and ο Beam body under tensioning
The effective length is equal to the above mentioned, =125.00
mm The strength is calculated as follows:
Critical failure mechanism for 2nd
row of bolts assumed to be
individual: Beam body under tensioning with FT = 164.50 kN
In similar fashion, the strength value for the 3rd
and fourth row of
bolts can be derived. The calculated strength values, as well as the critical mechanisms are appropriately noted:
Critical failure mechanism for the 3rd
row of bolts assumed to be
individual: Column flange under bending with FT = 282.24 kN
Critical failure mechanism for the 4th
row of bolts assumed to be
individual: Column flange under bending with FT = 282.24 kN

Page 159
Analysis will respectively carry on for all rows, assuming they are
all individual as well as group members, in accordance with the general flow diagram shown in paragraph 6.3.2. Following completion of all
iterations of the calculation process and assuming all bolts are group members, as stipulated by EC3, the following results will be derived, in conjunction with the final strength values for each row of bolts. One may
observe the non-linearity of distribution of bolts' forces, a fact which is expected due to variation in rigidity between the tensioned and compressed
areas.
Column body under shearing 940,76
Column body under compression 260,35
Beam body & flange under compression 337,39
Table 6.2 Strength values of basic node components (in kΝ)
Rows considered to be individual
Row i=l Column body under tensioning 529.43
Column flange under bending 282.24
End plate under bending 217.81
Beam body under tensioning 164.45
Fsolo = 164.45
Row i=2 Column body under tensioning 577.42
Column flange under bending 282.24
End plate under bending 217.81
Beam body under tensioning 164.45
Fsolo = 164.45
Row i=3 Column body under tensioning 577.42
Column flange under bending 282.24
End plate under bending 282.24
Beam body under tensioning 395.41
Fsolo = 282.24
Row i=4 Column body under tensioning 529.43
Column flange under bending 282.24
End plate under bending 282.24
Beam body under tensioning 395.41
Fsolo = 282.24

Page 160
Rows considered to be group members
Row i=2
Row j = 1 Column body under tensioning over group 700.91 Column flange under bending over group 489.99
End plate under bending over group 489.99 Beam body under tensioning over group 493.62
Fg = 489.99
SumFsolo = 164.45 Fqroup = 325.54
Fup = 164.45 F(i) = 164.45
Row i=3
Row j = 1
Column body under tensioning over group 1Ε + 10 Column flange under bending over group 529.2
End plate under bending over group 529.2 Beam body under tensioning over group 1Ε + 10
Fg = 529.2
SumFsolo = 328.9 Fqroup = 200.3
Row j = 2
Column body under tensioning over group 1Ε + 10
Column flange under bending over group 352.8
End plate under bending over group 352.8 Beam body under tensioning over group 1Ε + 10
Fg = 352.8
SumFsolo = 164.45 Fqroup = 188.35
Fup = 328.9
F(i) = 8.39

Page 161
Row i=4
Row j = 1
Column body under tensioning over group 1Ε + 10
Column flange under bending over group 705.6
End plate under bending over group 705.6 Beam body under tensioning over group 1Ε + 10
Fg = 705.6
SumFsolo = 611.14 Fqroup = 94.46
Row j = 2
Column body under tensioning over group 1Ε + 10
Column flange under bending over group 529.2
End plate under bending over group 529.2
Beam body under tensioning over group ΙΕ + 10
Fg = 529.2 SumFsolo = 446.89
Fqroup = 82.51
Row j = 3
Column body under tensioning over group 1Ε + 10 Column flange under bending over group 529.2
End plate under bending over group 529.2 Beam body under tensioning over group 1Ε + 10
Fg = 529.2
SumFsolo = 446.89 Fqroup = 82.51
Fup = 611.14 F(i) = -273.75
Table 6.4 Strength values of rows considered as group members

Page 162
The resulting force value for the fourth row was negative, therefore
it is considered that only the first three rows are subjected to tensioning.
The strength torque of the joint shall be derived as follows:
where η is the distance of the row from the centre of compression of the joint, which in this particular case is considered to be at the centre of the beam column flange. The strength torque has a value in excess of the
action torque MEd = 70000 kNmm, therefore structural adequacy is
achieved.
6.2.3.4 Classification of the joint
6.2.3.4.1 Finding initial stiffness Sj,ini
In accordance with paragraph 6.3.1 (prEN 1993-1-8) it follows that:
6.2.3.4.2 Classification regarding stiffness According to paragraph 5.2.2.5 (prEN 1993-1-8), the following is the
ultimate value of rotation stiffness Sjim of a node, in order to be regarded as
rigid:
in fact, the above applies for kb = 25 (fixed frame), therefore the joint can be
classified as rigid, in terms of stiffness.
6.2.3.4.3 Classification regarding strength
The bending strength of the beam cross section at the joint, taking
into account the column, shall be:
Furthermore it follows that:
Hence, the joint is considered to be of full strength.

Page 163
6.2.3.5 Check of rotation capability of joint
According to paragraph 6.4.2 (prEN 1993-1-8), the joint has insufficient rotational capability, since the critical mechanisms are as
follows:
• Row 1: Beam body under tensioning • Row 2: Beam body under tensioning • Row 3: Body and beam flange under compression The abovementioned components of the joint should be stronger in
order to meet this criterion, while parts referring to bending of the flange
and end plate could become weaker, so that these elements then become
critical. Then, the type of failure would exhibit a more ductile behavior and
rotational capability would be considered to be sufficient. 6.2.3.6 Check for shearing force
This check is carried out pursuant to table 3.4 (prEN 1993-1-8).
The resulting strength value for each row of bolts is considered equal to the
minimum of its strength under intrados compression and shearing force.
The resulting strength values for each row are presented in table 6.5.
Row of bolts Strength Strength under intrados
under shearing compression
1 102.54 198.44
2 102.54 244.80
3 102.54 1627.36
4 102.54 1627.36
5 102.54 1627.36 Table 6.5 Strength of each row under shearing force
Apparently, the critical quantity for each row is the shearing
strength of bolts, therefore the shearing strength of the entire joint will
become:
Furthermore, it is necessary to examine the validity of the criterion
of interference between tensioning and shearing for the bolts, i.e.:
This criterion is met for each row of bolts.

Page 164
6.3 Flow diagrams
6.3.1 Finding initial stiffness Sj,ini
Estimate of bolts under
tensioning
For each row of bolts under tensioning
Column body
under tensioning K3J
Column flange
under bending K4,i
End plate under bending Κ 5,i
Bolts under tensioning Κ10,i
Column body under shearing ΚΙ
Column body under compression
Κ2 Initial stiffness
Flow diagram 6.1 Finding initial stiffness

Page 165
6.3.2 Finding of strength torque
Column body
under shearing Fcws
For each row of bolts i ,
starting from top
Column body Body and beam flange
under compression Fcwc under compression Fbfc
Column body
under tensioning Fcwt
Column flange
under bending Fcfb
End plate
under bending Fpb
Beam body
under tensioning Fbwt
For each row of bolts j above i
next iteration
YES NO
Number of rows under tensioning nt = i-1
For each row of bolts j above i
Column body under tensioning,
of group i-j Fcwt,g Column flange under bending,
of group i-j Fcfb,g
End plate under bending,
of group i-j Fpb,g Beam body under tensile,
of group i-j Fbwt,g
For each row of bolts i from top up to nt
[hi: Distance of bolt row i from the middle
under beam flange]
Flow diagram 6.2 Finding strength torque

Page 166
7
Prop support connection

Page 167
7.1 Description of mechanical behavior
7.1.1 General
With the term 'prop base' we mean the lower part of the prop, the seating plate and the anchoring system (anchors). Usually the prop bases are designed without rigidity blades, but when they are expected to bear high bending torques, rigidity blades may also be used. The prop bases are seated either on a concrete foundation or on some other type of foundation (e.g. piles). Standard prEN 1993-1-8 includes rules for the calculation of their strength and rigidity. The process may be applied either to open or closed cross-section props. Moreover, it is possible to adopt design details
that include seating plates reinforced with steel elements encased in the foundation concrete. The impact of the concrete base to the overall response of the prop base is not covered by standard prEN 1993-1-8.
The classic approach for designing articulated prop bases leads to seating plate thicknesses that ensure uniform distribution of stresses, so the seating plate may be simulated as a rigid element. The classic design of prop bases that bear torques is performed using elasticity analysis on the basis of the assumption that the cross-sections remain flat. By solving the equilibrium equations we can calculate the maximum stress on the concrete foundation (linear distribution of stresses) as well as the tensile stress at the anchoring system. Even if this methodology has been proven to be satisfactory for many years, it actually ignores the flexibility of the bending seating plate, anchoring system and concrete. The idea adopted in prEN 1993-1-8 transforms the flexible base to an active solid plate and permits development of stresses on the concrete equal to the accumulated compression resistance. To this end, we use plastic distribution of internal forces in the O.K.A.
To calculate the rigidity we can apply the connection components
method as presented in a previous chapter. According to this method, we
initially identify the important elements of the connection, which are called
components, and then we define their strength and rigidity. These
components are properly configured in order to provide the simulation of
the overall connection.

Page 168
The rules for calculating the resistance at the prop bases are
provided in prEN 1993-1-8, Chapter 6.2.6, and the rules for calculating the rigidity are provided in Chapter 6.3.4. These chapters also include the
characteristics of the prop base components, such as the components at the compressed side and at the bent plate (Chapter 6.3.2), at the prop footing and at the compressed body (Chapter 6.2.4.7), and at the tensioned
side the tensioned anchoring system and the bending of the seating plate (Chapter 6.2.4.12). The method for receiving the horizontal shearing forces
is provided in Chapter 6.2.1.2, while the limits for classifying the prop bases into categories are provided in Chapter 3.2.2.5.
Tensioned anchors and
seating plate under bending
Prop footing and body under compression
Prop footing and body
under compression
Anchors under shearing
Reinforcing
plate
Figure 7.1 Typical prop bases and selection of their components
a) bolts inside the seating plate, b) bolts outside the seating plate
(possibly with rigidity elements)

Page 169
7.1.2 Elastic resistance of the prop base
The prop bases operate by converting the flexible seating plate to
an active solid plate. By limiting the plate deformations only within the
elastic area, the simulation receives the uniform accumulated stress under
the flexible plate. This provides a secondary assurance that the yield stress
of the prop base is not exhausted. The calculation of the effective bearing
area of the flexible seating plate is based on the effective width c
Figure 7.2 Finite elements simulation for a prop base with short T cross-section, and concrete
foundation under compression both before and after deformation, and main concrete stress
Figure 7.3 Simulations of prop bases
The elastic bending resistance per unit of length is calculated using
the formula

Page 170
and the bending torque per unit of length, which acts on the seating plate
and corresponds to a cantilevered beam of length c, is:
When these torques become equal, the bending torque resistance of the
prop base reaches its limit, and the formula for the calculation of c is:
7.1.3 Resistance of prop base with low-quality mortar
The impact of the low quality mortar has been studied both by
using experimental methods and numerically. It has been found that the
thin layer of cement grout does not affect the concrete resistance. It is also
expected that the thin layer of cement grout under 3-D compression
between the concrete and seating plate shall behave like a liquid. Most of the mortars have high resistance in comparison to the concrete
material. In such cases, the mortar may be ignored. In other cases, the
resistance can be checked by assuming a distribution of regular stresses
under the active plate at an angle of 45°. In case the mortar thickness is
greater than 50 mm, the characteristic strength of the mortar shall be
considered to be at least equal to the thickness of the foundation concrete
[prEN 1993-1-8].
Figure 7.4 Distribution of stresses on the cement grout

Page 171
7.1.4 Comparison of the calculations of concrete strength according
to EC2 and EC3
Standards prEN 1992-1-1, Design of Concrete Structures, and prEN 1993-1-8, Design of Steel Structures, solve the same problem of
concrete resistance when loaded by a steel plate. The limit of such compression is defined by the breaking of the concrete under compression.
The relevant literature can be divided into to large categories. In the publications referring to research works related to the stress status of steel plates, most of which involve the use of prestressed anchors, and in the
studies that focus on flexible plates loaded by the prop cross-section and bear the loads only through a part of the seating plate.
The experimental and analytical simulations include inter alia, ratios of concrete strength to the surface of the seating plate, the relevant depth of the concrete foundation, the identification of the seating plate installation area on the foundation, and the impact of reinforcement. The results of all such studies that relate to the breaking-through load and fully loaded plates provide quality information regarding the foundation of the prop base. The effects of failure are observed when an inverted stress distribution pyramid is created under the plate. The concrete ultimate state analysis application includes 3-D material behavior, plasticization and breaking. Experimental studies [Shelson, 1957; Hawkins, 1968, DeWoLf, 1978] led to the development of a suitable model for the stresses occurring at the prop bases, which has been adopted by the current standards. Moreover, it is required to perform a separate check of the concrete foundation under shearing, breaking-through and bending according to the final geometry of the prop base and all construction details. The impact of the flexible plate has been solved by introducing an
equivalent solid seating plate [StockweLL, 1975], [Baniotopoulos, 1994].
This assumption corresponds to the actual non-uniform distribution of
stresses where the max values follow the shape of the prop cross-section. The realistic behavior of this model has been recently confirmed by
experiments. 50 experiments in total have been carried out in order to investigate the concrete strength [DeWolf, 1978, Hawkins, 1968a]. In these experiments, the variants were the size of the concrete foundation, the size
and the thickness of the seating plate. The test samples consisted of concrete cubes 150 to 330 mm, which were subjected to centric
compression by a steel plate. Below we present the relation between the flexibility of the seating plate, which is expressed as the ratio of its
thickness to the distance from its edge, and the corresponding bearing resistance. The bearing capacity of the test samples at failure varies from

Page 172
1.4 to 2.5 times the capacity as calculated according to prEN 1993-1-8, with
an average value of 1.75.
This simple and practical model has been modified and has been checked by experiments [BijLaard, 1982], [Murray, 1983]. It was also established [DeWolf, SarisLey, 1980], [Wald, 1995], that the stress rises as the eccentricity of the regular force increases. In the case where the distance from the edge of the plate to the edge of the foundation is constant and the eccentricity of the load increases, the contact surface decreases and at the same time the stress also increases. Moreover, in case of breaking of the concrete surface under the fixed edge, the problem must be addressed theoretically, and this defines the limits of the practical implementation of this method [Ivanyi, Baniotopoulos, 2000]. Figure 7.5 shows the impact of the concrete strength. From the comprehensive research program of Hawkins, 16 experiments with similar geometry and material properties were selected and are presented here [Hawkins, 1968a]; in these experiments the concrete strength was selected as the only parameter (the strengths used were 19.31 and 42 Mpa).

Page 173
Results of calculations Results of experiments
Figure 7.5 Relation between bearing resistance and prop base flexibility
according to analytical formulae and experiments
Figure 7.6 Relation between concrete strength - bearing capacity under ultimate load

Page 174
7.1.5 Accumulation of stresses under the prop base
The mortar and concrete foundation resistance under compression has breaking under the seating plate as a limit. In the simulations used, the flexible seating plate has been replaced by an equivalent solid plate. The equivalent plate is defined by the cross-section of the prop increased by a strip with effective width c [prEN 1993-1- 8]. The bearing resistance of the foundation corresponds to a 3- D concrete stressing status. In this case, the strength measured during the experiments was approximately 6.25 times higher than the resistance of the concrete under compression. The
calculation of the bearing strength of the concrete fj is given in prEN 1993-
1-8 as a function of the accumulation factor kj, with a max value of 5.0 for a
square seating plate. The bearing resistance of the seating plate Fc,Rd is calculated by the following formulae:
The effective surface Aeff is shown in fig. 7.7. The mortar quality
and thickness are introduced into the calculations through the node coefficient βj. For a βj=2/3, it is expected that the rated strength fck,g of the mortar shall not be less than 0.2 times the rated strength of the concrete
foundation fck (fck,g < 0,2 fck) and the mortar thickness is tg< 0.2 min (a, b).

Page 175
In the case of lower quality or larger thickness of the mortar layer, the latter
must be checked separately. This check must be carried out in the same
manner as the check for the concrete foundation strength.
Only pivotal
action
Combination
of pivotal force
and torque
Pl. Neut. Axis
Only bending
torque
Effective surface around
the cross-section
Effective surface around
the compressed cross-
section area
Effective surface around
the compressed cross-
section area
Pl. Neut. Axis
Figure 7.7 Dimensions of concrete foundation and effective surface of the flexible seating plate

Page 176
7.1.6 Effective length of the Short-T base plate
The effective length of a short-T under tensioning is affected by the
failure mechanism of the short-T. Short-Ts at a prop base are similar to the
short-Ts at the beam-prop connections, but their failure mechanism may be
different. This is due to the large anchor lengths and the large thicknesses
of the seating plates in comparison to the beam-prop connection plates. The failure mechanism usually results due to detachment of the short-T
from the foundation, so no lever forces are produced. The resistance of the
short-T when not in contact with the concrete is:
where is the plastic bending torque of the base per unit of length. The
relation between failure mechanism 1, which corresponds to the beam-prop
connection, and the short-T failure mechanism when in contact is shown in
figure 7.9.
Figure 7.8 Short-T with no contact with the foundation

Page 177
Figure 7.9 Failure mechanism 1 for short-T at a prop base
The limit between failure mechanisms with or without contact can
be calculated using the analysis of the elastic deformations of the short-T,
and it can be expressed in various manners, e.g. as the ultimate length of a bolt Lb,lim. For bolts longer than Lb,lim, neither contact effects nor lever actions are observed. That limit is:
where As is the surface area of the bolt cross-section and Lb is the free
length of the anchor. For bolts encased in the concrete foundation, the Lb
may be considered as equal to the length above the concrete surface Lbf,
and the effective length of the encased section is estimated to be Lbe = 8 d,
so Lb = Lbf + Lbe [Wald,1999].
Figure 7.10 Free length of anchors encased in the concrete foundation

Page 178
The effective lengths of a short-T at a prop base are summarized below.
Figure 7.11 Dimensions of the prop base
Bolts not used at the prop feet
where lever forces appear where no lever forces appear
Bolts in the prop feet
Table 7.12 Effective lengths of short-T at a prop base

Page 179
7.1.7 Slip coefficient between steel and concrete
The friction coefficient between the seating plate and the ground is
provided in prEN 1993-1-8, paragraph 6.2.1.2. A value equal to Cf,d= 0.20
is used for cement-sand mortars, and a value Cf,d= 0.30 is used for special mortars. According to the CEB Guide [CEB, 1997], a value equal to 0.4 shall be used when a 3 mm thin layer of mortar is used. In such a case, a partial
safety coefficient equal to gMf = 1.5 must be used.
It must be noted that the friction coefficient acts, obviously, in favor of
loading of the anchors due to the shearing force, so it must be considered
as zero in favor of safety; thus we assume a smooth interface between the
seating plate and the cement mortar.
7.1.8 Transfer of shearing forces through anchors
The horizontal shearing force can be received through friction, from the seating plate, the mortar and the foundation, through shearing and bending of the anchors, through a shearing element bonded under the seating plate or through direct contact of the seating plate with the foundation. In most cases, the shearing force is received through friction occurring between the seating plate and mortar. Friction is a function of the minimum compressive load and friction coefficient. Prestressing of the
anchors leads to an increase of the resistance against the shearing force through friction. In cases where the horizontal shearing force cannot be received through friction due to the lack of a regular (vertical) force, provisions shall be made for the installation of elements suitable for receiving it (e.g. perforating nails).

Page 180
Figure 7.13 Transfer of horizontal perforating forces at the prop base through
a) friction from the seating plate, mortar and foundation b) shearing and bending of the anchors
c) shearing element bonded under the seating plate d) direct contact of the seating plate with the foundation
The transfer of shearing forces through anchors has been widely implemented in the USA for many years [DeWoLf, Ricker 1990]. In case the
holes, which are designed in a manner that ensures sufficient tolerances, are larger than the required size, they must be stabilized by a stabilization
ring or by injecting resin in the anchor hole. Additionally, a conservative method is presented in [CEB, 1997]. According to this method, the anchors behave as cantilever beams with length equal to the mortar thickness
increased by 0.5 d. Provided that the rotation of the anchor head is limited by the prop base, the opening is reduced to L/2.
Figure 7.14 Anchor subjected to bending according to CEB
In the model used for prediction of the design strength of the
connection, as described in prEN1993-l-8, it is considered that the anchors
shall be deformed whenever a tensioning force is applied on the anchor
and a compressive force is applied on the mortar. That prediction is based
on experimental and analytical work carried out by Bouwman [Bouwman et
al., 1989]. The design methodology is simplified at the practical

Page 181
implementations only by checking the shearing force and by limiting the
ultimate conditions.
Tensile strength
Reduced tensile strength
Shearing and bending strength
Figure 7.15 Anchor behavior under shearing a) symbols, b) forces, c) force-deformation diagram
7.1.9 Transfer of shearing forces through friction and anchors
The resistance simulation used in prEN 1993-1-8, paragraph 6.2.1.2, is based on the assumption that the anchors loaded by a shearing force bend, so eventually tensioning is developed on them. The bending resistance of the anchors is relatively low, so plastic joints are created. This activates task-related hardening effects on the ductile material of the anchor. In order to transfer shearing only the anchors at the compressed area of the plate can be used. In this case, the shearing resistance consists of a friction resistance at the seating plate - concrete interface and of a reduced tensile resistance of the bolts, that is:
The resistance of the bolts against intrados compression at the seating
plate and concrete must be checked separately.
Resistance to friction
Figure 7.16 Resistance to friction and tensioning on anchors

Page 182
7.1.10 Bolt anchoring rules
7.1.10.1 Theoretical data
The rules of Table 3.2, prEN 1993-1-8, regarding the resistance of bolts against tensioning may be used for all steel qualities and for the
anchors. The anchor force NEd must satisfy the formula:
where As is the net anchor cross-section, fub its ultimate strength, YMb the
partial safety coefficient, and Bb the reduction factor for the reduced cross-
section at the thread (the value Bb = 0.85 may be used).
Figure 7.17 Types of anchors
The various types of anchors are shown in figure 7.17. In the case
of high bending torques, it is possible to use anchors welded in groups as a
mesh, but such a solution is costly. Models for calculation of the design
resistance are proposed in the CEB Guide [CEB, 1997] and they are based
on research carried out by Eligehausen [Eligehausen 1990]. In these
models, the following failure mechanisms must be checked:
• Steel failure:
• Extraction:
• Concrete failure:

Page 183
• Failure due to concrete breaking: Similar checks are required in the case of grouped bolts.
Figure 7.18 Geometry of on-the-spot injected anchor with head
The calculation of the design resistance of an anchor includes the following
parameters:
The extraction resistance is:
where for non-cracked concrete: pk = 11fck and Ah is the bearing surface of
its head; for circular and square heads:
The concrete resistance is:
where
is the rated resistance of an anchor. Fro non-cracked concrete we can use
coefficient k1 = 11 (N/mm)0,5
. The impact of the distribution geometry
(interval) of anchors ρ and the distance form the edges e are included in the cone surface, see fig. 7.19.

Page 184
Figure 7.19 Concrete cone at a) an individual anchor, b) a group of anchors,
c) an individual anchor at the edge
Consecutively the following apply:
As concrete cone width we can use the value pcrN = 3.0hef. The disruption
to the distribution of concrete stresses may be taken into account by
introducing coefficient:
Parameter Ψec,N is introduced in order to take into account the impact of a
group of anchors, and is used for small encasing depths (hef < 100 mm).
The resistance increases for anchors in non-cracked concrete through parameter:
Failure due to tearing for on-the-spot constructed anchors can be avoided,
provided that the concrete is reinforced and the configuration of the
anchors is dense. The distances of the anchors shall not exceed:
and the distance from the edge shall not be greater than:

Page 185
The height of the concrete foundation shall not be less than:
where c0 is the required overlapping of the shoe reinforcement.
7.1.10.2 Check for bending of anchoring bodies
In case anchors with nuts or retention plate are being used, a
check for bending is also required. From tables for square plates and pro-
safety circular plates, the following applies:
where
with hρ equal to the thickness of the retention plate and b = 1. If the above check is not successful, the thickness of the retention plate or
nut must be increased.
7.1.11 Impact of the biaxial nature of loading to the
connection analysis procedure according to EC3
As is known, part 1.8 of EC3 does not provide details for dealing
with the biaxial bending at metal element foundations; on the other hand it
provides a summary of the fundamental principles for calculation of the
connection of a prop to be founded, which is stressed by an axial force and
a bending torque around its strong axis. So, in a completely similar manner with the connection torque for a
prop beam with front plate, we also propose the components method for
the seating connection of a prop; on the basis of this method, as mentioned
in chapter 7.2.6, the strength under torque is determined by the ultimate
strength loads of each critical mechanism that may be realized. Obviously, the critical mechanisms are directly related to the type
of loading and it is difficult for any one of them to be reduced to generalized
stress conditions using the instructions of the current version of EC. For example, suppose that we have a prop base stressed by a torque
around its strong axis.

Page 186
Basic connection components according to EC3:
tensioning compression
1. Prop body under tensioning 2. Prop footing and body under compression 3. Seating plate with anchors under bending
4. Concrete under compression
Plastic neutral axis
Figure 7.23 Strength of basic connection components according to part 1.8 of EC3,
for bending around the strong axis
The basic components proposed are, in this case, related to the
single-axis character of the connection. The components that are also related to tensioned elements, are characterized by an effective length of
an equivalent short-T, which is considered to simulate the behavior of the
connection. This length, in turn, relates to the arrangement of the bolts and
takes into account any interactions between the rows of bolts for the
realized failure type. In the case of biaxial loading, with the neutral axis at random slope,
intersecting the cross-section at random points, the term 'row of bolts' has
no meaning; moreover, one of the mentioned components may be
intersected by the plastic neutral axis, which makes non-valid certain
checks, such as the check for 'prop body under tensioning' since, for
example, the prop body may be tensioned partially, fully, or not at all. The same stands for the mechanism checking the 'prop footing and
body under compression'. Thus we notice an inability of the EC to cover special cases, such
as the biaxial stress case as discussed here, and this is attributed to the
fact that EC is still in a premature stage.

Page 187
tensioning compression
As mentioned above, the basic
components of the node, as
proposed by EC3, are not valid
in such a generalized loading. Plastic neutral axis
Figure 7.24 Biaxial loading of prop under compression
7.1.12 Assumptions in order to eliminate the difficulties arising due
to the fact that EC3 does not provide instructions for biaxial
loading
It is understandable that due to the above difficulties, certain
assumptions must be adopted for analyzing the connection in order to
adjust the provisions of EC3 in the case of bending around the two main
axii of the prop. We must note that it is necessary to perform experimental
procedures, and to carry out a detailed simulation of the node under the
acting stress quantities in order to confirm such assumptions. Initially, we must consider the node components relating to the
geometry of the prop as non-critical, so that they do not contribute to the
calculation of the strength torque of the node according to the components
method. Using this assumption, no checks of the prop body under
tensioning and footing body under compression are required. These
concepts, as mentioned in the previous chapter, are valid mainly for
bending around the strong axis.

Page 188
From the above, we can deduct that the strength of the tensioned
side of the node shall be determined only by the strength of the seating
plate together with the anchors, against bending. Correspondingly, the
strength of the compressed side of the node shall be determined only by
the compression strength of the concrete.
7.1.12.1 Strength of the tensioned side of the node
In the case of random loading of the seating node, the neutral axis
has random slope and it also intersects the cross-section at random points.
tensioning compression
Plastic neutral axis
Figure 7.25 Case of loading of a prop cross-section under compression and biaxial bending

Page 189
To deal with this general case, we create a number of short-Ts (with half the strength of the corresponding short-T) equal to the number of tensioned anchors. Each anchor that lies outside the footing of the prop cross-section is considered as creating a short-T with the seating plate, with width equal to its distance from the footing. Correspondingly, each tensioned anchor inside the feet creates a short-T with the body of the cross-section. The procedure to be followed is shown in fig. 7.25. Note also
that the anchors outside the cross-section footing, which are also not inside the footing width, are not taken into account for the calculation of the strength torque. These are considered as receiving only a shearing force, and this is a pro-safety assumption.
tensioning
compression
Plastic neutral axis
Figure 7.26 Short-Ts formed at the tensioned area of the node

Page 190
Thus the plastic forces of the anchors are independent of the loading and,
consequently, of the position of the plastic neutral axis. In this phase of the
calculation, the abovementioned assumption is of course involved, since
we do not take into account any interactions between the anchor failure
types, which normally are taken into account by considering the bolts as members of a group. Moreover, it is easy to calculate the torques around
the strong and weak axii of the prop, which are created due to the tensile
forces on the anchors. When using this method for calculation of the anchor strength
under tensioning together with the seating plate under bending, we also
make another simplifying assumption regarding the formation of the short-
Ts. These should be perpendicular to the plastic neutral axis, i.e.
perpendicular to the direction of the resultant bending torque. This usually
leads to more adverse results, since the bolts move away from the footing
of the equivalent short-T, and thus their tensile strength decreases.
tensioning
compression
Plastic neutral axis
Figure 7.27 A more rational consideration of the short-Ts of the bolts,
perpendicular to the direction of the resultant acting torque

Page 191
Finally, in favor of safety, any reinforcing plates either at the strong
or at the weak axis of the prop are not considered as reinforcement of the
tensioned area, so they do not contribute to the tensile strength of the
anchors. The reinforcing plates might otherwise be considered as
reinforcing webbings of the tensioned zone, and in such a case the
effective length of equivalent short-Ts would increase, resulting in a higher
plastic strength.
7.1.12.2 Strength of the compressed side of the node
The strength of the compressed side of the node is determined only by the compression strength of the concrete. As effective we consider only the area under the compressed elements of the node and at a distance equal to c around them, while as compressed elements we can consider the feet and bodies, or their reinforcing plates, which are under compression. There, according to EC3, we consider as constant and equal
to fr the distribution of stresses at the failure state. So, we have to calculate
the compressed surface area in order to find the compression force, as well as the center of gravity of that area in order to determine the lever arm during the assessment of the strength torque.
The process involves strenuous calculations due to generality
regarding the position and slope of the neutral axis. Initially, we form all
candidate effective compressed areas, i.e. under each compressed body,
footing, and reinforcing plate an orthogonal area is formed and projects by
a distance equal to c at both sides of the element.

Page 192
tensioning
compression
Plastic neutral axis
Figure 7.28 Effective foundation area around the compressed elements.
The stress under this area is has constant distribution with value fj.
Figure 7.29 Effective area of a compressed element at distance c on both sides

Page 193
tensioning
compression
Plastic neutral axis
Figure 7.31 Compressed areas under a footing and body with double-T cross-section
Similarly for the compressed reinforcing plates. After fully topologically defining the compressed area, we must
calculate some inertial characteristics of this area in order to finally derive
the plastic compression strength and the point where this force is applied.
These shall be calculated in relation to the center of the prop, against which
the intersection points of the compressed areas and the neutral axis will
have already been calculated. The calculation is carried out as follows:

Page 194
where p = y, ζ and q = y, ζ and n is the number of corners of the examined effective area, and A, Αp, Apq, Appq are the moments of inertia of the first, second and third order towards ρ, q.
Figure 7.32 Definition of positive direction (counter-clockwise)
for numbering of corners in an effective area
After completing the above procedure for all compressed effective
areas and after increasing each inertial quantity by the value that
corresponds to the current area, we derive as a sum the moments of inertia
of the 0, 1st, 2nd, and 3rd order for the overall compressed zone. The important ones are the moment of zero order, which is equal to the surface
area, and the moments of the 1st order towards y and z for identification of
the position of the center of gravity. Indeed, towards a random coordinate system y, z, the position of the center
of gravity of a closed flat surface section is provided by the formulae:
So we have determined the position of the resultant compressive force, and
the center of gravity. The compressive force applied to the concrete shall
be:

Page 195
where fj is the characteristic compression strength of the node, which is
also a function of the concrete quality and placement of the prop on the
shoe.
7.1.12.3 Total connection strength
tensioning compression
tensioned bolt i
compressed bolt, ignored
Plastic neutral axis during the calculation
of the strength torque
Figure 7.33 Coordinate system and position of the center of gravity of a compressed area
The total stress condition at the center of the prop shall be derived from the
equilibrium of forces towards axis x, and torques around axis y and z.
Finally, the quantities are derived as follows: Axial strength (compressive force positive):
where F c and IFb, are the force at the compressed area and the total
tensile strength respectively, exactly as they were calculated in the two previous paragraphs. Strength torque around the strong axis:
Strength torque around the weak axis:

Page 196
7.1.12.4 Necessity of employing interaction diagrams
It must be noted that the method described above for the calculation for the connection strengths involves ultimate plastic strengths; both the anchors and the concrete shall be stressed by their max strength forces. Direct consequence of the above is the inability to find the exact stress status of a compressed and tensioned zone, since the values of the action torques and axial force do not affect the calculation process. The above strength calculation formulae have a compound form and a simple
comparison of the actions with the corresponding strengths is not enough to ensure static adequacy. Instead, due to the interaction of these quantities (regular quantities), we must draw interaction diagrams for torques and axial forces; then, the adequacy of the connection shall be ensured provided that the loading lies within the diagram.
final position
of plastic neutral axis
tensioning
initial position
of plastic neutral axis
Figure 7.34 Initial position, final position, and slope of the plastic neutral axis
Figure 7.34 shows the process of successive placement of the neutral
axis so that it passes through the whole cross-section. For each position we
follow the described procedure in order to calculate the strengths, and derive a
vector for the interaction diagram [NRd, MyRd, MzRd]T. The neutral axis is
supposed to follow the elastic slope, i.e. the quotient of

Page 197
the two bending torques acting on the cross-section. Nevertheless, after
deriving the equilibrium equations for the deformed state, this slope may
change, and this is a non-linear phenomenon. But due to the high
sturdiness of the typically configured seating nodes, this slope is limited to
minimum values (less than 45°), so it can be ignored.
7.1.12.5 Calculation of pivotal rigidity
In this paragraph we shall describe the basic instructions of EC3 for
the calculation of the pivotal rigidity at prop seating connections, and we
shall attempt to modify them in order to be applicable in this case of biaxial
stress. EC suggests the procedure shown in the table below for the
calculation of pivotal rigidity Sr
Loading Lever arm z Pivotal rigidity Sj,ini
Left side under and and
tensioning
Right side under
compression where
Left side under και and
tensioning
Right side under
tensioning where

Page 198
Loading Lever arm z Pivotal rigidity Sj,ini
Left side under και and
compression
Right side under
tensioning where
Left side under και and
compression
Right side under
compression where
MEd > 0 is clockwise, NEd > 0 is tensioning, for μ. See 6.3.1(6)
Table 7.1 Calculation of pivotal rigidity at prop bases according to EC3 We must also note the following coefficients:
kT,l is the rigidity coefficient under tensioning of the left side of the node, and it must be taken as equal to the sum of rigidity
coefficients k15 and k16 in relation to the left side of the node
kT,r is the rigidity coefficient under tensioning of the right side of the node, and it must be taken as equal to the sum of rigidity
coefficients k15 and k16 in relation to the right side of the node
kC,l is the rigidity coefficient under compression of the left side of the node, and it must be taken as equal to the rigidity
coefficient k13 in relation to the left side of the node
KC,r is the rigidity coefficient under compression of the right side of the node, and it must be taken as equal to the rigidity
coefficient k13 in relation to the right side of the node

Page 199
Finally, distances z are defined as follows:
a) Connection of prop base in the case
of prevailing axial compressive force
b) Connection of prop base in the
case of prevailing axial tensile force
c) Connection of prop base in the case
of prevailing bending torque
d) Connection of prop base in the
case of prevailing bending torque Table 7.2 Definition of distances z
It is obvious that the previous formulae must be modified and
generalized for the case of bending around the two main prop axis. The total connection rigidity shall be equal to the sum of the rigidities of the tensioned and compressed zone. So we must find the rigidities at these two
zones, and the corresponding lever arms z. In favor of safety we assume that the components of the node related to the tensioned prop body and the
compressed body and footing do not contribute to its pivotal rigidity. As a result, the node is considered more flexible, and this is a more adverse
case.
As regards the tensioned zone, the rigidity shall be derived as a
sum of coefficients k15 and k16, which, according to EC3, are defined as
follows:

Page 200
, when contact forces develop, (7.52)
, when no contact forces develop, (7.53)
, when contact forces develop, (7.54)
και , when no contact forces develop. (7.55)
So for each tensioned anchor we calculate coefficients k15 and k16,
following the calculation of the corresponding effective length of the
equivalent short-T ?eff per bolt, and the geometrical distance m. Then we
add these two coefficients for all tensioned anchors. As regards the calculation of the lever arm for the tensioned zone, it is considered to be identical to the distance between the center of gravity of all tensioned anchors and the neutral axis, and this is an assumption in favor of safety, since usually the lever arm starts from the row of bolts that has the higher distance from the neutral axis.

Page 201
tensioning
compression
center of gravity
of the tensioned
anchor polygon
Plastic neutral axis
Figure 7.35 The lever arm of the tensioned zone is considered as equal to the distance of the
center of gravity of the tensioned anchor polygon from the neutral axis
For the compressed area of the node, the formula provided by EC3 is
and it is modified as follows
where Aeff is the effective surface of the compressed cross -section. The
lever arm of this zone is equal to the distance of the center of gravity of the compressed area from the neutral axis, as shown in fig. 7.35.

Page 202
tensioning
compression
center of gravity of the compressed area
Plastic neutral axis
Figure 7.36 The lever arm of the tensioned zone is considered as equal to the distance
of the center of gravity of the effective compressed area from the neutral axis
It must be noted that if only compression or only tensioning is applied at the cross-section, then we must ignore each corresponding rigidity coefficient from those mentioned above. Finally, in order to calculate the rigidity, we perform a calculation according to Table 7.2, but we use the
values of zc, zT, k13, k14, κ 15 that were calculated in this paragraph.
7.2 Detailed connection calculation
We select a prop with double-T cross-section, type ΗΕΒ 300, which
is welded on the seating plate, whose dimensions are 700/400/25, using 6
mm thick outer seams at the footing and body. We also place reinforcing

Page 203
plates on the strong axis of the prop; their dimensions are 700/450/15, and
they are welded using 5 mm thick horizontal outer seams at the seating
plate and 8 mm thick vertical outer seams at the prop footing. The anchors used are type Μ24/7.8, high coherence. The type of steel for all connection media is S235. The anchoring method and length shall be selected on the basis of calculations, so they are not defined beforehand. The shoe dimensions are 2500/2000/1500 and its concrete quality is C20/25. Finally, we use a 40 mm thick layer of cement grout under the whole surface of the seating plate, whose quality is the same as the shoe concrete. As presented in the following figures, we have deliberately selected a geometrical eccentricity both between the shoe and seating plate, and between the plate and prop in order to show the complete calculation path for a general geometry case. The stress quantities acting on the prop at the footing area are:
• Torque around its strong axis My,Ed= 250 kNm
• Torque around its weak axis Mz,Ed= 80 kNm
• Axial compressive load ΝEd= 1200 kN
• Shearing force along axis z Vz,Ed = 280 kN
• Shearing force along axis y Vy,Ed = 150 kN
It must be reminded that all dimensions are in millimeters, unless
specified otherwise.

Page 204
Figure 7.37 Plan view of foundation node and sign of positive bending torques
Figure 7.38 Side view of the connection

Page 205
Figure 7.39 Front view of the connection
Figure 7.40 Detail of anchor placement on the seating plate

Page 206
7.2.1 Check of Distances 7.2.1.1 Check of Anchor Distances For the anchors on the seating plate we have: 7.2.1.2 Check of cement grout thickness Regarding the cement grout thickness, according to paragraph 6.2.5 (7) of
prEN 1993-1-8, we have:
Moreover, for the rated strengths of the cement grout and shoe concrete
respectively, we have:
7.2.1.3 Check of Weldings Regarding the welding thicknesses, the checks are as follows:
• Between seating plate and prop body:
• Between seating plate and prop footing:
• Between prop footing and reinforcing plate:
• Between seating plate and reinforcing plate:

Page 207
7.2.2 Connection calculation 7.2.2.1 Finding the basic node parameters For the distances between the cheeks of the seating plate and shoe we
have:
The corresponding effective surfaces of the shoe are:
The following applies:
so no decrement of surface A1,eff is required.
Coefficient bj is considered to be equal to 2/3 since the prerequisites of
paragraph 6.2.5 (7) (prEN 1993-1-8) are met.
Coefficient kj is calculated as follows:
Using formula 6.5 (prEN 1993-1-8) we get the value of coefficient c: 7.2.2.2 Starting and ending points for neutral axis shift within
the cross-section We initially suppose that we have a coordinate system whose center lies at
the center of the seating plate.

Page 208
Figure 7.41 Definition of coordinate system
The stress quantities shall become in this system:
The neutral axis shall have a slope that corresponds to the quotient of the
above two action torques, i.e.:
and shall be shifted in order to pass through the whole seating plate, as
shown in fig. 7.42.

Page 209
shift direction of
the neutral axis
Figure 7.42 The neutral axis shall be successively shifted
in order to pass through the whole seating plate
The coordinates of points A and B are calculated to be equal to:
and
The neutral axis is shifted using a very small step, to ensure that the
resulting interaction diagram is sufficiently precise. In order to present the
calculation process, we shall consider an intermediate case for the neutral
axis, for which the strengths against torques around the two axii and
against an axial force shall be calculated. Thus we shall have a resulting
vector that lies on the interaction surface. In the same manner we calculate
the rest of its points.

Page 210
7.2.2.3 Solving for the neutral axis at a specific point
of the cross-section Let the plastic neutral axis be at the position shown in fig. 7.43. Its line
equation is:
y = -3.125x 130
tensioned area
compressed area
neutral axis
Figure 7.43 The neutral axis intersects the body and footing of the prop,
as well as the two reinforcing plates
We observe that tensioning takes place a the left area of the node,
so the anchors identified by numbers 1, 2, 3, and 4 in fig. 7.43 are
tensioned and contribute to the node torque strength.
7.2.2.3.1 Tensioned side of the node 7.2.2.3.1.1 Assessment of strength of each tensioned anchor
The strength of each tensioned anchor shall be calculated from the
formed short-Ts. As we have already mentioned, the anchors above the
footing form a short-L to the prop footing, and the anchors inside the feet
form a short-L to the body, as shown in figure 7.44.

Page 211
Figure 7.44 Formed short-Ts for tensioned anchors
The strengths shall be derived from table 6.6 (prEN 1993-1-8).
For anchors 1 and 3, the procedure is as follows: The effective length of the short-T for a bolt within the footing of the prop is
provided by:
From table 6.2, we shall calculate the plastic strength forces:
so contact forces may appear.

Page 212
The final tensile strength shall be equal to:
The rigidity coefficient κ15 of the checked anchor shall be:
and k16 shall be
For anchor 2 we have: The effective length of the short-T for a bolt outside the footing of the prop,
provided that it is not an edge bolt, is:
From table 6.2, we shall calculate the plastic strength forces:
so contact forces may appear.

Page 213
The final tensile strength shall be equal to:
The rigidity coefficient k15 of the checked anchor shall be:
and k16 shall be
Anchor 4 lies within the prop feet, so its effective length shall be calculated
using the following formulae of table 6.6:
where m = 107.71 mm and α is calculated from table 6.11 for l1 = 0.57 and
l2 = 0.28, and is found to be equal to 6.00.
From table 6.2, we shall calculate the plastic strength forces:
so contact forces may appear.

Page 214
The final tensile strength shall be equal to:
The rigidity coefficient k15 of the checked anchor shall be:
and k16 shall be
7.2.2.3.2 Compressed side of the node
We follow the method described in paragraph 7.1.12.2 to calculate the surface area and the position of the center of gravity of the compressed side of the node. It must be reminded that in this case the stress distribution under ultimate failure condition is constant and equal to f,. The center of gravity is found to be at point C (140, 23) using the coordinate system of
fig. 7.45. The compressed area is equal to Ac = 126792.61 mm2. Thus the
compressive force on the concrete shall be:

Page 215
tensioned area
compressed area
neutral axis
Figure 7.45 Compressed effective area of the node
7.2.2.3.3 Node strength
For this particular position and slope of the neutral axis we get the
following stress values: The axial strength is calculated as follows:
The torque around the strong axis of the prop due to the forces on anchors
and the compressive force on the concrete shall be:
Correspondingly, for the strength torque around the weak axis:

Page 216
neutral axis
tensioned area
compressed area
Figure 7.46 Definition of coordinates xj, yi, xc, yc
This triad constitutes a column vector on the interaction surface.
Similarly, we shift the neutral axis so that it passes through the whole
surface of the seating plate in order to get the corresponding values of the
interaction diagram. The final picture shall be as follows:

Page 217
Figure 7.47 Interaction diagram for axial torque around the strong axis
It is established that loading lies within the diagram, so adequacy is
ensured.

Page 218
Similarly, the diagram for the axial force and torque around the weak axis
is:
Figure 7.48 Interaction diagram for axial torque around the weak axis

Page 219
Loading lies again within the interaction diagram, so safety is also ensured
as regards bending around the weak axis.
7.2.2.3.4 Pivotal rigidity of node
The calculation of the pivotal rigidity shall be carried out for the
position of the neutral axis where the axial strength coincides with the
compressive action. According to the assumptions described in paragraph
7.1.12.5, the lever arm of the tensioned area is equal to the distance of the
center of gravity of the polygon of the tensioned bolts from the position of
the neutral axis.
neutral axis
tensioned area
compressed area
center of compression
center of gravity of the
tensioned bolts polygon
Figure 7.49 Definition of lever arms of tensioned and compressed area
The resultant action torque shall be:

Page 220
and the resultant strength torque shall be: The relation
is met, so the connection lies within the elastic area and:
The rigidity of the tensioned area is calculated as the sum of rigidity
coefficients k15 and k16 for all tensioned bolts. It is found to be equal to:
Similarly, for the rigidity of the compressed area, according to table
6.1, we have:
where Aeff is the compressed area for the above position of the neutral axis.
According to table 6.12 we have:
It must be noted that this rigidity relates to bending around the
neutral axis and has nothing to do with the rigidity coefficients around axii y
and z. The rotation around the neutral axis shall be:

Page 221
This rotation may be reduced to separate rotations around the two main
axii:
Where and λ is the direction coefficient of the neutral axis, i.e.:
7.2.2.4 Check of anchoring on the foundation
Anchoring shall be checked using the anchor that bears the highest tensioning force, which, according to previous calculations, has been found
to be equal to Ft = 203.33 kΝ. It is supposed that high coherence anchors
have been used. The coherence point is derived from ΕΚΩΣ2000, and it is found to be equal to 2.30 Μ Pa. For straight-line anchoring:
For a typical value of reinforcement overlapping for shoes c = 100 mm, the
above value for the anchoring length is sufficient since:
So we select straight-line anchoring. If the above condition was not met, it
would be required to use another anchoring system.