Embed Size (px)
Citation preview
CHAPTER 2
Discrete-Time Martingales
2.1. Conditional probability and conditional expectation
2.1.1. Conditional expectation with respect to a set. Let (Ω,F , P) be a prob-
ability space.
Recall: If the sets A,B ∈ F and P(B) > 0, the conditional probability of A with
respect to B is defined by
P(A|B) =P(A ∩ B)
P(B).
Remark 2.1. The set function P(·|B) : F −→ R is a probability measure.
Definition 2.2. The conditional expectation of a random variable X given B is defined
as the expectation of X with respect to the conditional probability P(·|B).
Example 2.3. Consider a probability space with
Ω = {1, 2, 3, 4} F = σ({1}, {2}, {3}, {4}),
and the probability measure
P({1}) =1
2, P({2}) =
1
4, P({3}) =
1
6, P({4}) =
1
12.
Let B = {1, 2, 3}, then
P(A|B) =P(A ∩ B)
P(B)=
P(A ∩ B)1
2+
1
4+
1
6
=12
11P(A ∩ B).
23

24 2. DISCRETE-TIME MARTINGALES
This implies that
P({1}|B) =12
11P({1}) =
6
11,
P({2}|B) =12
11P({2}) =
3
11,
P({3}|B) =12
11P({3}) =
2
11,
P({4}|B) =12
11P({4}) = 0.
Let X(1) = 4, X(2) = 3, X(3) = 2, X(4) = 1. Then
E[X] = X(1) · P({1}) + X(2) · P({2}) + X(3) · P({3}) + X(4) · P({4})
= 4 · 1
2+ 3 · 1
4+ 2 · 1
6+ 1 · 1
12=
19
6,
E[X|B] = X(1) · P({1}|B) + X(2) · P({2}|B) + X(3) · P({3}|B) + X(4) · P({4}|B)
= 4 · 6
11+ 3 · 3
11+ 2 · 2
11+ 1 · 0 =
37
11.
����������������������: ��� E[X] ��� X ���
� / ����; ������ E[X|B] ��� X ������� B ������, �
�, �������������; ����������������.
2.1.2. Conditional expectation with respect to random variable.
Definition 2.4. Let X and Y be discrete random variables on (Ω,F , P) and assume
that P(Y = y) > 0. Suppose that p(x, y) is the joint mass function of X and Y and pY is
the probability mass function of Y ; explicitly,
pY (y) =∑
x
p(x, y).

2.1. CONDITIONAL PROBABILITY AND CONDITIONAL EXPECTATION 25
(1) The function
pX|Y (x|y) = P(X = x|Y = y) = P({ω : X(ω) = x}|{ω : Y (ω) = y})
=P(X = x, Y = y)
P(Y = y)=
p(x, y)
pY (y)
is called the conditional probability mass function of X given that Y = y.
(2) The conditional expectation of X, given that Y = y (for all values of y such that
P(Y = y) > 0), is defined by
E[X|Y = y] =∑
x
P(X = x|Y = y) =∑
x
xP(X = x, Y = y)
P(Y = y)
=∑
x
xp(x, y)
pY (y).
Example 2.5. (1) Consider Ω = {1, 2, 3} and F is the collection of all subsets of
Ω. Moreover,
P({1}) =1
2, P({2}) =
1
3, P({3}) =
1
6.
Suppose X(ω) = ω, Y (ω) = 4 − ω. Then
p(1, 1) = p(1, 2) = 0, p(1, 3) =1
2,
p(2, 1) = p(2, 3) = 0, p(2, 2) =1
3,
p(3, 2) = p(3, 3) = 0, p(3, 1) =1
6,
and
pY (1) =1
6, pY (2) =
1
3, pY (3) =
1
2.

26 2. DISCRETE-TIME MARTINGALES
Thus,
pX|Y (1|1) = pX|Y (1|2) = 0, pX|Y (1|3) = 1,
pX|Y (2|1) = pX|Y (2|3) = 0, pX|Y (2|2) = 1,
pX|Y (3|2) = pX|Y (3|3) = 0, pX|Y (3|1) = 1.
(2) Suppose that the joint probability mass function of X and Y is given by
p(1, 1) =1
12, p(1, 2) =
1
24, p(1, 3) =
1
48,
p(1, 1) =1
6, p(2, 2) =
1
8, p(2, 3) =
1
16,
p(3, 1) =1
4, p(3, 2) =
1
12, p(3, 3) =
1
6.
Then
pY (1) = p(1, 1) + p(2, 1) + p(3, 1) =1
12+
1
6+
1
4=
1
2,
pY (2) = p(1, 2) + p(2, 2) + p(3, 2) =1
24+
1
8+
1
12=
1
4,
pY (3) = p(1, 3) + p(2, 3) + p(3, 3) =1
48+
1
16+
1
6=
1
4.
Thus,
pX|Y (1|1) =1
6, pX|Y (1|2) =
1
6, pX|Y (1|3) =
1
12,
pX|Y (2|1) =1
3, pX|Y (2|2) =
1
2, pX|Y (2|3) =
1
4,
pX|Y (3|1) =1
2, pX|Y (3|2) =
1
3, pX|Y (3|3) =
2
3.
2.1. CONDITIONAL PROBABILITY AND CONDITIONAL EXPECTATION 27
This implies that
E[X|Y = 1] = 1 · pX|Y (1|1) + 2 · pX|Y (2|1) + 3 · pX|Y (3|1) =7
3,
E[X|Y = 2] = 1 · pX|Y (1|2) + 2 · pX|Y (2|2) + 3 · pX|Y (3|2) =13
6,
E[X|Y = 3] = 1 · pX|Y (1|3) + 2 · pX|Y (2|3) + 3 · pX|Y (3|3) =31
6.
���������: ����� random variables �����? �����
�� Y � distribution ������, P(Y = y) = 0, ��������. ��
����������. ������ P(X = x|Y = y), ��������
P(x ≤ X < x +�x|y ≤ Y < y +�y), �� �y → 0. Let X and Y be jointly continuous
random variables with joint probability density function f(x, y). ��
P(x ≤ X < x + �x|y ≤ Y < y + �y) =P(x ≤ X < x + �x, y ≤ Y < y + �y)
P(y ≤ Y < y + �y)
=
∫ x+�x
x
∫ y+�y
y
f(x, y) dy dx∫ y+�y
y
fY (y) dy
−→
∫ x+�x
x
f(x, y) dx
fY (y),
as �y → ∞. Thus, we can have the following definition.
Definition 2.6. (1) The conditional probability density function of X, given that
Y = y, is defined for all valued of y such that fY (y) > 0 by
fX|Y (x|y) =f(x, y)
fY (y).
(2) The conditional expectation of X, given that Y = y, is defined by
E[X|Y = y] =
∫ ∞
−∞xfX|Y (x|y) dx,
28 2. DISCRETE-TIME MARTINGALES
provided that fY (y) > 0.
Remark 2.7. Let g be a Borel measurable function. Then
E[g(X)|Y = y] =
∫ ∞
−∞g(x)fX|Y (x|y) dx.
Example 2.8. Suppose that the joint density function of X and Y is given by
f(x, y) =1
yexp
(−x
y− y
)0 < x, y < ∞.
Compute E[X|Y = y] and E[X2|Y = y].
Solution. The marginal density function of Y is given by
fY (y) =
∫ ∞
0
f(x, y) dx =
∫ ∞
0
1
yexp
(−x
y− y
)dx
= e−y(−e−x/y
)∣∣∞x=0
= e−y.
Thus,
fX|Y (x|y) =f(x, y)
fY (y)=
1
ye−
xy .
Then
E[X|Y = y] =
∫ ∞
−∞xfX|Y (x|y) dx =
∫ ∞
0
x
ye−
xy dx = · · · = y
E[X2|Y = y] =
∫ ∞
−∞x2fX|Y (x|y) dx =
∫ ∞
0
x2
ye−
xy dx = · · · = 2y2.
Notation 2.9. Denote E[X|Y ] by the function of the random variable Y whose value
at Y = y is E[X|Y = y].
Example 2.10. As in Example 2.8,
E[X|Y ] = Y, E[X2|Y ] = 2Y 2.
Remark 2.11. E[X|Y ] is a random variable.
2.1. CONDITIONAL PROBABILITY AND CONDITIONAL EXPECTATION 29
E[X|Y ]�� conditional expectation�� �������. ���������
sample space � decomposition��� decomposition������. decomposition
� conditional expectation �������. ������ σ-algebra �����
�������.
��������������������, � E[X|A]. ��������
����������, �������?
2.1.3. Conditional expectation with respect to decomposition.
� E[X|Y ] E[X|Y = y] ������? �� Y discrete random
variable � case. ���� E[X|Y = y] ���, E[X|Y ] ������ y � Y ����.
��� Y � discrete random variable (i.e., Y ������ countable ��) ����
� E[X|Y ](ω) � E[X|Y (ω)], � E[X|Y = y] (for Y (ω) = y). ��
E[X|Y ] = E[X|Y = y1] I{Y =y1} + E[X|Y = y2]I{Y =y2} + · · ·
=∞∑i=1
E[X|Y = yi] I{Y =yi}
������? � {Y = yi} �, E[X|Y ] ��� E[X|Y = yi], X � {Y = yi} ���������. ������������ ����������������
�, ��������.
2.1.3.1. Conditional probability with respect to the decomposition of a
sample space. Consider a probability space (Ω,F , P). Let D = {D1, D2, ..., Dn} satisfy
(1) D is a decomposition of Ω, i.e.,
D1 ∪ D2 ∪ · · · ∪ Dn = Ω, Di ∩ Dj = ∅ for i = j;
(2) Di ∈ F for all i;
30 2. DISCRETE-TIME MARTINGALES
(3) P(Di) > 0 for all i.
Therefore, for A ∈ F , the conditional probability P(A|Di) is well-defined for all i.
Definition 2.12. The conditional probability of a set A ∈ F with respect to the
decomposition D is defined by
P(A|D) =n∑
i=1
P(A|Di) IDi.
Example 2.13. Consider ([0, 1],B1,m), A = [1/2, 3/4] and
D = {[0, 1.3], (1/3, 2/3), [2/3, 1]}.
Then
P(a|D) = P(A|[0, 1/3]) I[0,1/3] + P(A|(1/3, 2/3)) I(1/3,2/3) + P(A|[2/3, 1]) I[2/3,1]
=P([1/2, 2/3))
P((1/3, 2/3))I(1/3,2/3) +
P([2/3, 3/4])
P([2/3, 1])I[2/3,1]
=1
2I(1/3,2/3) +
1
4I[2/3,1].
Remark 2.14. (1) If D = {Ω}, then
P(A|D) = P(A|Ω) IΩ = P(A).
(2) P(A|D) is a random variable and
P(A|D) =n∑
i=1
P(A|Di) IDi.
This implies that if ω ∈ Di, P(A|D)(ω) = P(A|Di).
(3) If A, B are disjoint,
P(A ∪ B|D) = P(A|D) + P(B|D).

2.1. CONDITIONAL PROBABILITY AND CONDITIONAL EXPECTATION 31
2.1.3.2. Conditional probability with respect to the decomposition induced
by a discrete random variable. Let
Y =n∑
i=1
yiIDi, (2.1)
where y1, y2, ..., yn are distinct constants, and {D1, D2, ..., Dn} is a decomposition of Ω
with P(Di) > 0 for all i. Then
Di = {Y = yi}.
Definition 2.15. (1) DY = {D1, D2, ..., Dn} is called the decomposition induced by Y .
(2) P(A|Y ) := P(A|DY ) is called the conditional probability of A with respect to
the random variable Y . Moreover, we denote by P(A|Y = yi) the conditional
probability P(A|Di).
(3) Suppose Y1, Y2, ..., Yk are random variables of the form (2.1). We denote DY1,Y2,...,Yk
the decomposition induced by Y1, Y2, ..., Yk. Then P(A|DY1,Y2,...,Yk) is denoted by
P(A|Y1, Y2, ..., Yk).
Example 2.16. (1) Let Ω = [0, 10], P =m
10, A = (3, 5) ∪ (7, 9] and
Y = 5I[0,4] + I[8,10]
(This implies DY = σ([0, 4], (4, 8), [8, 10])). Then
P(A|Y ) = P(A|DY )
= P(A|[0, 4]) I[0,4] + P(A|(4, 8)) I(4,8) + P(A|[8, 10]) I[8,10]
=1/10
4/10I[0,4] +
2/10
4/10I(4,8) +
1/10
2/10I[8,10]
=1
4I[0,4] +
1
2I(4,8) +
1
2I[8,10].

32 2. DISCRETE-TIME MARTINGALES
(2) Let X and Y be i.i.d. random variables with P(X = 1) = p and P(X = 0) = q
(p + q = 1). Let
Ak = {X + Y = k}
for k = 0, 1, 2. Since
P(Ak|Y = l) = P(X + Y = k|Y = l) =P(X + Y = k, Y = l)
P(Y = l)
=P(X + Y = k)P(Y = l)
P(Y = l)= P(X + Y = k),
we have
P(Ak|Y ) = P(Ak|Y = 0) I{Y =0} + P(Ak|Y = 1) I{Y =1}
= P(X = k) I{Y =0} + P(X = k − 1) I{Y =1}.
Therefore,
P(A0|Y ) = P(X = 0) I{Y =0} + P(X = −1) I{Y =1}
= q I{Y =0} = q(1 − Y )
P(A1|Y ) = P(X = 1) I{Y =0} + P(X = 0) I{Y =1}
= p(1 − Y ) + qY = p + (q − p)Y
P(A2|Y ) = P(X = 2) I{Y =0} + P(X = 1) I{Y =1}
= pY.
2.1.3.3. Conditional expectation with respect to the decomposition
Recall: Let X be a simple random variable, i.e.,
X =m∑
i=1
xi IAi,

2.1. CONDITIONAL PROBABILITY AND CONDITIONAL EXPECTATION 33
where {A1, A2, ..., Am} are disjoint subsets of Ω, x1, x2, ..., xm are distinct real numbers
(This implies that X is σ({A1, A2, ..., Am})-measurable). Then
E[X] =m∑
i=1
xi P(Ai).
Definition 2.17. The conditional expectation of X with respect to a decomposition
D = {D1, D2, ..., Dn} is defined by
E[X|D] =m∑
i=1
xi P(Ai|D). (2.2)
Proposition 2.18. (1) E[aX + bY |D] = aE[X|D] + bE[Y |D].
(2) E[c|D] = c, where c is a constant.
(3) E[IA|D] = P(A|D).
(4) E[E[X|D]] = E[X].
������������� conditional expectation ��, � conditional
expectation ����, ���� Subsection 2.1.4 ����
Remark 2.19. (1) E[X|D] is a random variable.
(2) ��������� ��������� conditional expectation ���
�:
E[X|D] =m∑
i=1
xiP(X = i|D) =m∑
i=1
xiP(Ai|D).
���� (2.2) �������.
(3) �� conditional probability ���,
E[X|D] =m∑
i=1
xi P(Ai|D) =m∑
i=1
xi
n∑j=1
P(Ai|Dj) IDj
=n∑
j=1
E
[m∑
i=1
xi IAi
∣∣∣∣∣Dj
]IDj
=n∑
j=1
E[X|Dj] IDj.
34 2. DISCRETE-TIME MARTINGALES
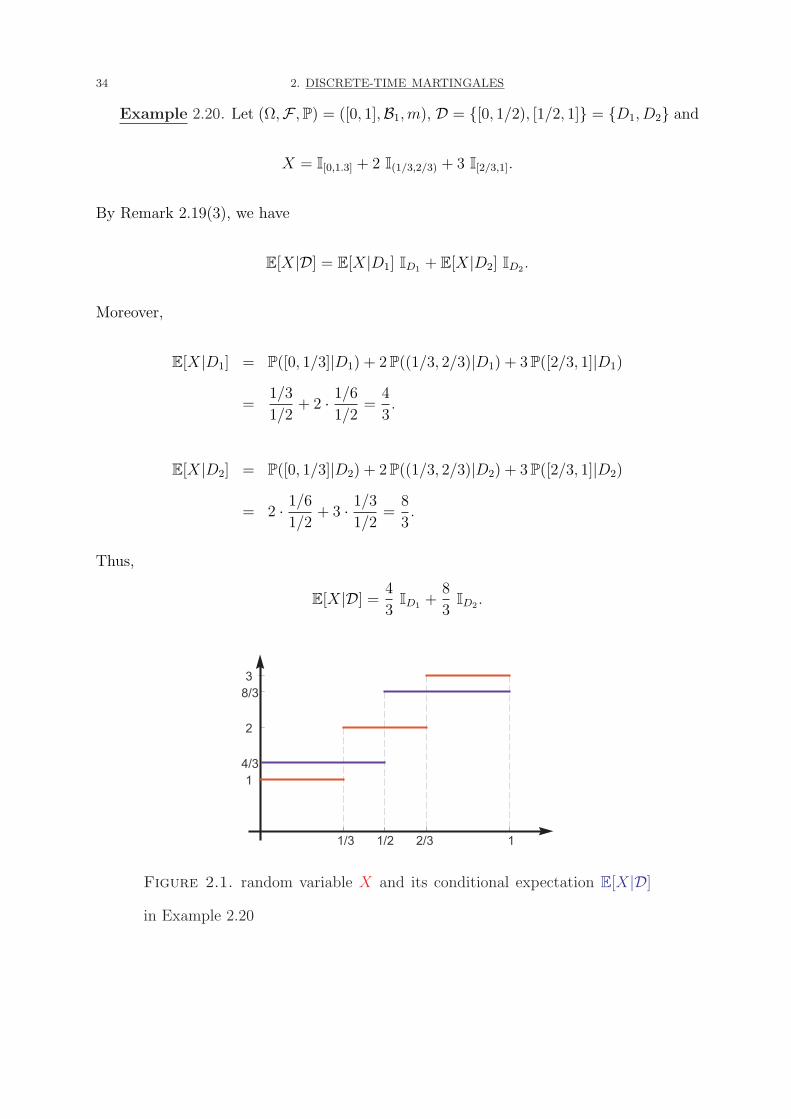
Example 2.20. Let (Ω,F , P) = ([0, 1],B1,m), D = {[0, 1/2), [1/2, 1]} = {D1, D2} and
X = I[0,1.3] + 2 I(1/3,2/3) + 3 I[2/3,1].
By Remark 2.19(3), we have
E[X|D] = E[X|D1] ID1 + E[X|D2] ID2 .
Moreover,
E[X|D1] = P([0, 1/3]|D1) + 2 P((1/3, 2/3)|D1) + 3 P([2/3, 1]|D1)
=1/3
1/2+ 2 · 1/6
1/2=
4
3.
E[X|D2] = P([0, 1/3]|D2) + 2 P((1/3, 2/3)|D2) + 3 P([2/3, 1]|D2)
= 2 · 1/6
1/2+ 3 · 1/3
1/2=
8
3.
Thus,
E[X|D] =4
3ID1 +
8
3ID2 .
1/3 1/2 2/3 1
1
2
38/3
4/3
Figure 2.1. random variable X and its conditional expectation E[X|D]
in Example 2.20
2.1. CONDITIONAL PROBABILITY AND CONDITIONAL EXPECTATION 35
������ X simple random variable � case, � X positive random
variable, ����� random variable � case, construct ���� Section 1.3 �
construct expectation �������, ��������� �.
2.1.4. Conditional expectation with respect t0 σ-algebra . ����: ��
����� Y discrete random variable. � Y continuous random variable, ��
��� uncountable ���������������?
Now, for G ⊆ F : subalgebra and X is a nonnegative random variable. How to define
E[X|G]?
��������������������? �������������
��������� random variable X ����. �, ������������
�, �����.
Definition 2.21. The conditional expectation of X with respect to G is a nonnegative
random variable denoted by E[X|G] or E[X|G](ω), such that
(i) E[X|G] is G-measurable.1
(ii) For all A ∈ G, ∫A
E[X|G] dP =
∫A
X dP.2
������� information �. ����, σ-algebra �� information,
E[X|G] �� G ��� information ������. �� (i) �����������
� G �����. �� (ii) ������������.
1��������“����”. ������� {E[X|G] ≤ C} ∈ G for all C. ������
��.
2� G ��������, random variable X ������� E[X|G]�����������.

36 2. DISCRETE-TIME MARTINGALES
�������: �� X and G, � ����� well-defined? �����
��?
���������������: Radon-Nikodym Theorem. �������
���� ��. �������!��, ����������!��
���. ��������.
Remark 2.22. The conditional expectation exists and is unique for all X and G up
to some P-null set due to Radon-Nikodym theorem.
Example 2.23. (1) Consider a probability space ([0, 1],B1,m). Let X be uni-
formly distributed on [0, 1] and let
G = σ
({0 ≤ X <
1
2
},
{1
2≤ X ≤ 1
}).
We have two different method to get the desired conditional expectation.
Method 1: Using the decomposition of sample space. Then
E[X|G] = E
[X
∣∣∣∣{
0 ≤ X <1
2
}]I{0≤X< 1
2} + E
[X
∣∣∣∣{
1
2≤ X ≤ 1
}]I{ 1
2≤X≤1}.
Since
P
[A
∣∣∣∣{
0 ≤ X <1
2
}]=
P
(A ∩
{0 ≤ X <
1
2
})P
({0 ≤ X <
1
2
}) ,
we have
E [X |{0 ≤ X < 1/2} ] =
∫[0,1]
X dP (· ∩ {0 ≤ X < 1/2})P ({0 ≤ X < 1/2})
=1
P ({0 ≤ X < 1/2})∫
[0,1]
XI{0≤X<1/2} dP
=1
1/2
∫ 1/2
0
x dx = x2∣∣1/2
x=0=
1
4.

2.1. CONDITIONAL PROBABILITY AND CONDITIONAL EXPECTATION 37
Similarly, we have
E [X |{1/2 ≤ X < 1} ] =1
P ({1/2 ≤ X < 1})∫
[0,1]
XI{1/2≤X<1} dP
=1
1/2
∫ 1
1/2
x dx = x2∣∣1x=1/2
=3
4.
Method 2: Using the definition of condition expectation: By Definition 2.21 (i),
we see that
E[X|G] = c1 I{0≤X< 12} + c2 I{ 1
2≤X≤1}.
For A = {0 ≤ X < 12},
∫A
E[X|G] dP = c1P({0 ≤ X <1
2}) =
c1
2,
∫A
X dP =
∫ 1/2
0
x dx =1
2x2
∣∣1/2
x=0=
1
8.
By Definition 2.21 (ii), we see that
c1
2=
1
8.
Hence, c1 = 1/4. Similarly, we can get c2 = 3/4.
Thus,
E[X|G] =1
4I{0≤X< 1
2} +
3
4I{ 1
2≤X≤1}.
(2) Consider a probability space ([0, 1],B1,m). Let X be a random variable with
probability density function f(x) = 2x. Let
G = σ
({0 ≤ X <
1
3
},
{1
3≤ X <
2
3
},
{2
3≤ X ≤ 1
}).
Using a similar argument as above, we have
E[X|G] =2
9I{0≤X< 1
3} +
14
27I{ 1
3≤X< 2
3} +
38
45I{ 2
3≤X≤1}.

38 2. DISCRETE-TIME MARTINGALES
How about the general case?
Let X be a general random variable. As the same as the integrability argument in
Chapter 1, consider
X = X+ − X−,
where X+ = X ∨ 0, X− = (−X) ∨ 0.
Assumption. min{E[X+], E[X−]} < ∞.
Definition 2.24. The conditional expectation E[X|G], or E[X|G](ω), of any random
variable with respect to the σ-algebra G, is defined by
E[X|G] = E[X+|G] − E[X−|G],
if min{E[X+|G], E[X−|G]} < ∞ P-a.s. On the set of sample points for which E[X+|G] =
E[X−|G] = ∞, E[X+|G] − E[X−|G] is given by an arbitrary value.
������� conditional probability, ��� conditional probability ���
conditional expectation. � ����"���: ��� conditional expectation,
��� conditional expectation ��� conditional probability.
����, �� ���� �����
E[X] =
∫Ω
X dP.
Take X = IA, then
E[IA] =
∫Ω
IA dP =
∫A
dP = P(A).
����� X �� � IA ��, ��������������� conditional
probability.

2.1. CONDITIONAL PROBABILITY AND CONDITIONAL EXPECTATION 39
Definition 2.25. Let B ∈ F . The conditional probability of B with respect to G is
defined by
P(B|G) = E[IB|G].
Proposition 2.26. (1) If X ≡ C P-a.s., then E[X|G] = C P-a.s.
(2) If X ≤ Y P-a.s., then E[X|G] ≤ E[Y |G] P-a.s.
(3) |E[X|G]| ≤ E[|X||G] P-a.s.
(4) For constants a,b with aE[X] + bE[Y ] < ∞, then
E[aX + bY ] = aE[X] + bE[Y ].
(5) Consider the trivial σ-algebra F∗ = {∅, Ω}. Then
E[X|F∗] = E[X], P − a.s.
(6) If X is G-measurable, then E[X|G] = X.
(7) E[E[X|G]] = E[X].
(8) (Tower property) If G1 ⊂ G2, then
E[E[X|G1]|G2] = E[X|G1] = E[E[X|G2]|G1].
(9) Let Y be G-measurable with E|X| < ∞, E|XY | < ∞. Then
E[XY |G] = Y E[X|G], P − a.s.
Proof. (1), (2), (4), (5), (6) are easy by definition of conditional expectation.
(3) Consider X = X+ − X−.
(7) By the second assertion of Definition 2.21, let A = Ω, we have
E[E[X|G]] =
∫Ω
E[X|G] dP =
∫Ω
X dP = E[X]

40 2. DISCRETE-TIME MARTINGALES
(8) (i) Since E[X|G1] is G1-measurable and G1 ⊂ G2, E[X|G1] is G2-measurable. By
the above statement (6), we have E[E[X|G1]|G2] = E[X|G1].
(ii) Clearly, E[E[X|G2]|G1] is G1-measurable. Moreover, for A ∈ G1,
∫A
E[E[X|G2]|G1] dP =
∫A
E[X|G2] dP =A∈G2
∫A
X dP
=
∫A
E[X|G1] dP.
(9) This proof is a little bit complicated. We give here only the sketch of the proof.
Step 1: Consider first the case Y is a G-measurable indicator function, i.e.,
Y = IA for A ∈ G. It is easy to prove this due to Definition 2.21.
Step 2: Using the linearity property (4) to prove the case where Y is a G-
measurable simple random variable.
Step 3: Using a sequence of G-measurable simple random variables to ap-
proach the positive G-measurable random variable Y .
Step 4: For the general case, consider Y = Y + − Y −.
�
Theorem 2.27. Let (Xn) be a sequence of random variables.
(1) (Conditional Dominated Convergence Theorem) If |Xn| ≤ X, E|X| < ∞, and
Xn −→ X P-a.s., then
E[Xn|G] −→ E[X|G], P − a, s.
(2) (Conditional Monotone Convergence Theorem)
(i) If Xn ≥ Y , E[Y ] > −∞, and Xn ↗ X P-a.s., then
E[Xn|G] ↗ E[X|G], P − a, s.

2.1. CONDITIONAL PROBABILITY AND CONDITIONAL EXPECTATION 41
(ii) If Xn ≤ Y , E[Y ] < ∞, and Xn ↘ X P-a.s., then
E[Xn|G] ↘ E[X|G], P − a, s.
(3) (Conditional Fatou’s Lemma)
(i) If Xn ≥ Y and E[Y ] > −∞, then
E[lim infn
Xn|G] ≤ lim infn
E[Xn|G].
(ii) If Xn ≤ Y and E[Y ] < ∞, then
lim supn
E[Xn|G] ≤ E[lim supn
Xn|G].
(4) If Xn ≥ 0, then
E
[∑n
Xn
∣∣∣∣∣G]
=∑
n
E[Xn|G].
(5) (Conditional Jensen’s inequality) If ϕ is a convex function on R and E[X] < ∞,
E[ϕ(X)] < ∞, then
ϕ (E[X|G]) ≤ E[ϕ(X)|G].
Remark 2.28. Denote
σ(Y ) = {{ω : Y (ω) ∈ B} : B ∈ B1} = σ({Y ≤ r}) : r ∈ R.
Then
E[X|Y ]︸ ︷︷ ︸Notation 2.9
= E[X|σ(Y )]︸ ︷︷ ︸Definition 2.21
.
Proposition 2.29. If Y and a σ-algebra G are independent3,
E[Y |G] = E[Y ].
3(1) Two σ-algebras G1 and G2 are independent if for every Ai ∈ Gi, A1 and A2 are independent.
(2) We say that a random variable Y and a σ-algebra G are independent if σ(Y ) and G are independent.

42 2. DISCRETE-TIME MARTINGALES
Exercise
(1) Consider a probability space (Ω,F , P) with Ω = {1, 2, 3, 4}, F = σ({1}, {2}, {3}, {4}),and
P({1}) =1
6, P({2}) =
1
3, P({3}) =
1
4, P({4}) =
1
4.
Define three random variables, X, Y and Z, by
X(1) = 1, X(2) = 1, X(3) = −1, X(4) = −1,
Y (1) = 1, Y (2) = −1, Y (3) = 1, Y (4) = −1,
and Z = X + Y .
(a) List the sets in σ(X).
(b) Determine E[Y |X] and E[Z|X].
(c) Find E[Z|X] = E[Y |X].
(d) Let B = {1, 2, 4}. For A ∈ F , find P(A|B).
(e) Let
W = I{1,2,4} + 2I{3},
find E[X|W = 1], E[X|W = 2], and E[X|W ].
(2) Consider the probability space ([0, 1],B1,m).
(a) Suppose X is uniformly distributed on [0, 1] and
G = σ({0 ≤ X ≤ 1/2}, {1/2 < X ≤ 2/3}, {2/3 < X ≤ 1}).
Find E[X|G].
(b) Suppose the probability density function of Y is f(y) = 2y on [0, 1] and
G = σ({0 ≤ Y ≤ 1/2}, {1/2 < Y ≤ 2/3}, {2/3 < Y ≤ 1}).

2.1. CONDITIONAL PROBABILITY AND CONDITIONAL EXPECTATION 43
Find E[Y |G].
(3) Consider the probability space ([0, 1],B1,m).
(a) Let
X(ω) = 3ω2, Y (ω) =
⎧⎪⎨⎪⎩
2, if 0 ≤ ω < 1/2,
ω, if 1/2 ≤ ω ≤ 1.
Find E[X|Y ] and E[X2|Y ].
(b) Let X and Y be random variables with joint density function
fX,Y (x, y) =
⎧⎪⎨⎪⎩
3
2(x2 + y2), if x, y ∈ [0, 1],
0, otherwise.
Find E[X|Y ] and E[X2|Y ].
(4) Let X and Y be integrable random variables on a probability space (Ω,F , P).
Then we can decompose Y into
Y = Y1 + Y2,
where Y1 = E[Y |X] and Y2 = Y − E[Y |X].
(a) Show that Y2 and X are uncorrelated.
(b) More general, show that Y2 is uncorrelated with every σ(X)-measurable ran-
dom variable.
Hint: For every σ(X)-measurable random variable W , there exists a func-
tion g such that W = g(X).
(5) Let X1, X2, ..., Xn be a sequence of independent identically distributed random
variables and let
Sn = X1 + X2 + · · · + Xn.

44 2. DISCRETE-TIME MARTINGALES
Suppose P(X1 = 1) = p = 1 − P(Xi = 0) for some 0 < p < 1. Compute the
value of P(X1 = 1|Sn = k) for k = 0, 1, 2, ..., n and the conditional expectation
E[X1|Sn = k].
2.2. Discrete-time martingales
Let (Ω,F , P) be a probability space.
Definition 2.30. (1) A sequence of σ-algebra (Fn)n≥1 is called a filtration if Fn ⊆Fn+1 for all n ≥ 1.
(2) A probability space (Ω,F , P) with filtration F = (Fn) is called a filtered probability space,
and is denoted by (Ω,F , F, P) or (Ω,F , (Fn), P).
Example 2.31. Let Ω = N = {1, 2, ..., n} and let F = the collection of all subsets of
Ω. Set
F0 = {, Ω}
F1 = σ({1})
F2 = σ({1}, {2})...
Fn = σ({1}, {2}, ..., {n})...
Then (Fn) is a filtration.

2.2. DISCRETE-TIME MARTINGALES 45
Definition 2.32. Let (Xn)n≥1 be a sequence of random variables and (Fn)n≥1 is a
filtration. We say (Xn,Fn) is a martingale (��, or say (Xn) is a martingale with
respect to (Fn), (Xn) is an (Fn)-martingale) if
(a) Xn ∈ Fn for all n, i.e., (Xn) is (Fn)-adapted;
(b) E|Xn| < ∞ for all n;
(c) Xn = E(Xn+1|Fn), P-a.s. for all n.
Remark 2.33. The condition (c) in Definition 2.32 is equivalent to
(c′) Xn = E(Xm|Fn) for all m > n.
(c′′)
∫A
Xn dP =
∫A
Xm dP for all A ∈ Fn and for all m > n.
Example 2.34. (1) Let (ξn) be a sequence of independent and identically dis-
tributed random variables with E|ξn| < ∞ and E(ξn) = 0. Define
Xn =n∑
i=1
ξi and Fn = σ(ξ1, · · · , ξn) = σ(X1, · · · , Xn)4.
Then
(a) Since ξ1, ξ2, ..., ξn ∈ Fn, Xn ∈ Fn for all n.
(b) E|Xn| = E
∣∣∣∣∣n∑
i=1
ξi
∣∣∣∣∣ ≤n∑
i=1
E|ξi| < ∞;
4Proof of σ(ξ1, · · · , ξn) = σ(X1, · · · , Xn):
(a) Since Xn =n∑
i=1
ξi, we have Xn ∈ σ(ξ1, · · · , ξn). Thus,
σ(X1, · · · , Xn) ⊆ σ(ξ1, · · · , ξn).
(b) Since ξn = Xn − Xn−1, we have ξn ∈ σ(Xn−1, Xn) ⊆ σ(X1, · · · , Xn). Thus,
σ(ξ1, · · · , ξn) ⊆ σ(X1, · · · , Xn).

46 2. DISCRETE-TIME MARTINGALES
(c) Due to the definition of Xn, independence of (ξn) and Lemma 2.29, we have
E[Xn+1|Fn] = E[Xn + ξn+1|Fn] = Xn + E[ξn+1|Fn]
= Xn + E[ξn+1] = Xn, P − a.s.
Thus, (Xn,Fn) is a martingale.
(2) Let (ξn) be a sequence of independent strictly positive random variables with
Eξn = 1 for all n. Define
Xn =n∏
i=1
ξi,
Fn = σ(ξ1, ξ2, ..., ξn).
Then
(a) Since ξ1, ξ2, ..., ξn ∈ Fn, this implies that Xn ∈ Fn for all n.
(b) Since ξi > 0 for all i,
E|Xn| = E
(n∏
i=1
ξi
)=
n∏i=1
E[ξi] = 1 < ∞.
(c) Due to the definition of Xn, independence of (ξn) and Lemma 2.29, we have
E[Xn+1|Fn] = E[Xnξn+1|Fn] = XnE[ξn+1|Fn]
= XnE[ξn+1] = Xn.
Thus, (Xn,Fn) is a martingale.
(3) Let X be a random variable with E|X| < ∞ and (Fn) is a filtration. Define
Xn = E(X|Fn) for all n. Then (Xn,Fn) is a martingale.
Remark 2.35. The choices of P and (Fn) are important.

2.2. DISCRETE-TIME MARTINGALES 47
Lemma 2.36. If (Xn) is an (Fn)-martingale, then
E(Xn) = E(Xn−1) = · · · = E[X0].
Definition 2.37. (1) (Xn) is an (Fn)-submartingale (��, �, �) if (a) +
(b) +
(d) Xn ≤ E(Xn+1|Fn) for all n P -a.s.
(2) (Xn) is an (Fn)-supermartingale (!�, �, ) if (a) + (b) +
(e) Xn ≥ E(Xn+1|Fn) for all n P -a.s.
Remark 2.38. (1) Xn ≤ E(Xn+1|Fn) P-a.s. for all n
⇐⇒ Xn ≤ E(Xm|Fn) for all m > n P -a.s.
⇐⇒∫
A
Xn dP ≤∫
A
Xm dP for all m > n and for all A ∈ Fn.
(2) Xn ≥ E(Xn+1|Fn) P-a.s. for all n
⇐⇒ Xn ≥ E(Xm|Fn) for all m > n P -a.s.
⇐⇒∫
A
Xn dP ≥∫
A
Xm dP for all m > n and for all A ∈ Fn.
(3) (Xn,Fn) is a submartingale
⇐⇒ (−Xn,Fn) is a supermartingale.
(4) (Xn,Fn) is a martingale
⇐⇒ (Xn,Fn) is a submartingale and supermartingale.
Theorem 2.39. Let (Xn,Fn) be a submartingale and let ϕ be an increasing convex
function defined on R. If ϕ(Xn) is integrable for all n, then (ϕ(Xn)) is a submartingale
w.r.t. Fn.
Proof. Since ϕ is increasing and
E[Xn+1|Fn] ≥ Xn P − a.s.,

48 2. DISCRETE-TIME MARTINGALES
we have
ϕ(Xn) ≤ ϕ (E[Xn+1|Fn]) ≤ E[ϕ(Xn+1)|Fn] (conditional Jensen’s inequality).
This implies that (ϕ(Xn)) is a submartingale. �
Remark 2.40. (1) If (Xn) is a martingale and ϕ is a convex function defined on
R, then ϕ(Xn) is a submartingale.
(2) If (Xn) is a martingale and ϕ is a concave function defined on R, then ϕ(Xn) is
a supermartingale.
Corollary 2.41. If (Xn,Fn) is a submartingale, then (X+n ,Fn) is a submartingale.
Corollary 2.42. If (Xn,Fn) is a martingale, then
(1) If Xn ∈ Lp, (|Xn|p,Fn) is a submartingale for 1 < p < ∞.
(2) (|Xn|,Fn) is a submartingale.
(3) (|Xn| log+ |Xn|,Fn) is a submartingale, where log+ x = max{log x, 0} for x > 0.
Proof. |x|p, |x|, and |x| log+ |x| are convex. �
Corollary 2.43. If (Xn,Fn) is a supermartingale, (Xn∧A) is a supermartingale with
a constant A.
Proof. Exercise. �
Example 2.44. (1) Let (ξn) be independent random variables with E|ξn| < ∞and E(ξn) ≥ 0. Define
Xn =n∑
i=1
ξi and Fn = σ(ξ1, · · · , ξn).

2.2. DISCRETE-TIME MARTINGALES 49
Then
E[Xn+1|Fn] = E[Xn + ξn+1|Fn] = Xn + E[ξn+1|Fn]
= Xn + E[ξn+1] ≥ Xn, P − a.s.
This implies that (Xn,Fn) is a submartingale.
(2) (Xn,Fn) is a martingale, then (exp(Xn),Fn) is a submartingale.
(3) Let (ξn) be a sequence of independent random variables with 0 ≤ ξn ≤ 1 for all
n. Define
Xn =n∏
i=1
ξi.
Then
E[Xn+1|Fn] = XnE[ξn+1|Fn] = XnE[ξn] ≤ Xn.
Thus, (Xn,Fn) is a supermartingale.
Exercise
(1) Let ξ1, ξ2, ... be a sequence of coin tosses and let Fn be the σ-algebra generated
by ξ1, ξ2, ..., ξn. For each of the following events find the smallest n such that
the even belong to Fn.
A = { the first occurence of heads is preceeded by no more than 10 tails },B = { there is at least 1 head in the sequence ξ1, ξ2, ...},C = { the first 100 tosses produce the same outcome },D = { there are no more than 2 heads and 2 tails among the first 5 tosses }.
(2) Let X be a random variable with E|X| < ∞. Define Xn = E[X| Fn] for all n.
Prove that (Xn) is an (Fn)-martingale.

50 2. DISCRETE-TIME MARTINGALES
(3) Let X1 and Y1 be independent and identically distributed random variables with
P(X1 = 1) = P(X1 = −1) = 1/2. Moreover, define
Z =
⎧⎪⎨⎪⎩
1, if X1 + Y1 = 0,
−1, if X1 + Y1 = 0.
Set X2 = X1 + Z and Y2 = Y1 + Z. Show that (Xi)i=1,2 and (Yi)i=1,2 are
martingales, but (Xi + Yi)i=1,2 is not.
(4) Let (Xn) be a sequence of random variables defined by
Xn = ξ1 + ξ2 + · · · + ξn,
where ξ1, ξ2, ... is a sequence of independent identically distributed random
variables such that
P(ξn = 1) = P(ξn = −1) =1
2.
(a) Show that X2n − n is a martingale with respect to the filtration Fn =
σ(ξ1, ξ2, ..., ξn).
(b) Show that the stochastic process (Yn) defined by
Yn = (−1)n cos(πXn)
is a martingale with respect to (Fn)
(5) Let (ξn) be a sequence of independent identically distributed Bernoulli random
variables with generating function M(t) = E[exp(tξ1)] < ∞ for t = 0 and let
Xn =n∑
i=1
ξi. Prove that the sequence (Zn) with
Zn = exp(tXn)/Mn(t)
is a martingale.

2.3. MARTINGALE TRANSFORMS AND DOOB DECOMPOSITION 51
(6) Let X0 = 0 and for k ∈ N,
P(Xk = 1|Xk−1 = 0) = P(Xk = −1|Xk−1 = 0) =1
2k, P(Xk = 0|Xk−1 = 0) = 1 − 1
k
and
P(Xk = k · Xk−1|Xk−1 = 0) =1
kP(Xk = 0|Xk−1 = 0) = 1 − 1
k.
Show that (Xn) is a martingale with respect to (Fn), where Fn = σ(X0, X1, ..., Xn).
2.3. Martingale transforms and Doob decomposition
2.3.1. Martingale transforms. Consider a filtered probability space (Ω,F , (Fn), P).
Definition 2.45. If Mn ∈ Fn−1 for all n, we say that the stochastic process (Mn) is
an (Fn)-predictable process.
Definition 2.46. (1) Let (Xn,Fn) be a stochastic process and let M = (Mn,Fn−1)
be a predictable process, then the stochastic process
(M · X)n = M0X0 +n∑
i=1
Mi(Xi − Xi−1)
is called the transform of X by M .
(2) If, in addition, X is a martingale, we say that M · X is a martingale transform.
Theorem 2.47 (Martingale transformation theorem). Let (Mn) be a sequence of
bounded random variables.
(1) If (Xn,FXn ) is a supermartingale and (Mn) is a sequence of (Fn)-predictable
nonnegative random variables, then ((M · X)n,FXn ) is a supermartingale.
(2) If (Xn,FXn ) is a submartingale and (Mn) is a sequence of (Fn)-predictable non-
negative random variables, then ((M · X)n,FXn ) is a submartingale.

52 2. DISCRETE-TIME MARTINGALES
(3) If (Xn,FXn ) is a martingale and (Mn) is a sequence of (Fn)-predictable random
variables, then ((M · X)n,FXn ) is a martingale.
Proof. (2) Since
(M · X)n = M1X1 +n∑
i=1
Mi(Xi − Xi−1)
= M1X1 +n∑
i=1
Mi(Xi − E[Xi|Fi−1])︸ ︷︷ ︸martingale part
+n∑
i=1
Mi(E[Xi|Fi−1] − Xi−1)︸ ︷︷ ︸increasing process part
,
we see that (M ·X)n is a submartingale. (��������� Theorem 2.50 ��.
������������"���) �
2.3.2. Doob decomposition.
Definition 2.48. A sequence of random variables (Zn) is called an increasing process
if
(1) Z1 = 0 and Zn ≤ Zn+1 for all n ≥ 1.
(2) E(Zn) < ∞ for all n.
Example 2.49. (1) Zn = n − 1 for all n, then (Zn) is an increasing process.
(2) Zn = (n−1)X, where X is a nonnegative random variable with E(X) < ∞, then
(Zn) is an increasing process.
(3) Zn ∼ N (0, n−1) for all n and (Zn) are independent, then (Zn) is not an increasing
process.
Theorem 2.50 (Doob decomposition). Any submartingale (Xn,Fn) can be written as
Xn = Yn + Zn, (2.3)

2.3. MARTINGALE TRANSFORMS AND DOOB DECOMPOSITION 53
where (Yn,Fn) is a martingale and (Zn) is an increasing predictable process.
Proof. Let
Y1 = X1,
Yn = X1 +n∑
i=2
[Xi − E(Xi|Fi−1)], for n ≥ 2.
Claim: (1) (Yn) is a martingale with respect to (Fn).
(2) Zn := Xn − Yn is an increasing process.
(1) By definition
E[Yn+1|Fn] = E[X1 +n+1∑i=2
[Xi − E(Xi|Fi−1)]|Fn]
= X1 +n∑
i=2
[Xi − E(Xi|Fi−1)]︸ ︷︷ ︸(i)
+ E[Xn+1 − E[Xn+1|Fn]|Fn]︸ ︷︷ ︸(ii)
Clearly,
(i) = Yn,
(ii) = E[Xn+1|Fn] − E[Xn+1|Fn]|Fn] = E[Xn+1|Fn] − E[Xn+1|Fn] = 0.
Thus, (Yn) is a martingale.
(2) Z1 = X1 − Y1 = 0. For n ≥ 2, we have
Zn = Xn − Yn = Xn −(
X1 +n∑
i=1
(Xi − E[Xi|Fi−1])
).

54 2. DISCRETE-TIME MARTINGALES
Thus,
Zn+1 − Zn =
(Xn+1 −
(X1 +
n+1∑i=1
(Xi − E[Xi|Fi−1])
))
−(
Xn −(
X1 +n∑
i=1
(Xi − E[Xi|Fi−1])
))
= (Xn+1 − Xn) − (Xn+1 − E[Xn+1|Fn])
= E[Xn+1|Fn] − Xn ≥ 0,
since (Xn) is a submartingale.
(3) Moreover, we have
Zn = Xn − X1 −n∑
i=1
(Xi − E[Xi|Fi−1])
= E[Xn|Fn−1] − X1 −n−1∑i=1
(Xi − E[Xi|Fi−1]) ∈ Fn−1.
Thus, (Zn) is an (Fn)-predictable process.
�
Remark 2.51. (1) The decomposition (2.3) is unique.
(2) An increasing predictable Z in (2.3) is called a compensator of the submartingale
X.






















![Quasi-Martingales - [Rao] - 1969](https://img.pdfslide.net/doc/110x75/577c80111a28abe054a72a6a/quasi-martingales-rao-1969.jpg)






