Embed Size (px)
Citation preview
UNIVERSIDAD POLITÉCNICA DE MADRID
ESCUELA TÉCNICA SUPERIOR DE INGENIEROS AERONÁUTICOS
Proyecto de Fin de Carrera
DISEÑO PRELIMINAR DE UN AEROGENERADOR
DE 20 MW DE POTENCIA
Alberto Rodríguez Mitre
Tutores:
Álvaro Cuerva Tejero
Cristóbal José Gallego Castillo
Óscar López García
6 de septiembre de 2014

2
Índice general
Índice general 3
Índice de figuras 7
Índice de cuadros 11
1. La energía eólica 19
1.1. ¿Qué es la energía eólica? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.2. Ventajas e inconvenientes de la energía eólica . . . . . . . . . . . . . . . . . . . . . . . 20
1.2.1. Ventajas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
1.2.2. Inconvenientes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
1.3. Situación global de la energía eólica . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
1.3.1. La energía eólica en Europa . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
1.3.2. La energía eólica en España . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2. El aerogenerador 25
2.1. Historia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.2. Tipos de aerogeneradores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.2.1. Aerogeneradores de eje vertical . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.2.2. Aerogeneradores de eje horizontal . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.3. Componentes de un aerogenerador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.4. Estado del arte. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3
4 ÍNDICE GENERAL
3. La norma IEC 61400 31
3.1. La clase del aerogenerador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.2. Condiciones de viento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.3. Otras condiciones ambientales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4. El rotor: diseño aerodinámico 35
4.1. Modelo teórico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.2. Aplicación práctica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.2.1. Selección del número de palas . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.2.2. Selección de la distribución de perfiles óptima . . . . . . . . . . . . . . . . . . . 36
4.2.3. Resultados de la optimización del rotor . . . . . . . . . . . . . . . . . . . . . . 40
5. Dimensionado: determinación del radio del rotor 45
5.1. Potencia específica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
5.2. Elección del radio del rotor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
5.3. Ley de cuerdas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
5.4. Actuaciones básicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
5.4.1. Mapas de actuaciones adimensionales . . . . . . . . . . . . . . . . . . . . . . . 54
5.4.2. Curvas de actuaciones adimensionales . . . . . . . . . . . . . . . . . . . . . . . 57
5.4.3. Curvas de actuaciones dimensionales . . . . . . . . . . . . . . . . . . . . . . . 58
5.4.4. Curvas de control estacionario . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
5.5. Resumen de características del aerogenerador . . . . . . . . . . . . . . . . . . . . . . . 62
6. Dimensionado: Estimación de masas de componentes 65
6.1. Datos de entrada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
6.2. Estimación de masas total . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
6.3. Selección de materiales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
6.3.1. Palas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
6.3.2. Buje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
6.3.3. Góndola . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
6.3.4. Torre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
ÍNDICE GENERAL 5
7. Cálculo estructural 71
7.1. Selección de materiales de la pala . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
7.1.1. Estados tensionales de la pala . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
7.2. Cargas sobre el rotor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
7.2.1. Cargas aerodinámicas en el rotor . . . . . . . . . . . . . . . . . . . . . . . . . . 78
7.2.2. Cargas centrífugas en el rotor . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
7.2.3. Cargas gravitatorias en el rotor . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
7.2.4. Envolventes de todas las cargas sobre el rotor . . . . . . . . . . . . . . . . . . . 92
7.3. Cargas sobre la torre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
7.4. Análisis de vibraciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
7.4.1. Análisis de las palas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
7.4.2. Análisis de la torre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
7.4.3. Diagrama de Campbell . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
7.4.4. Diagrama de Waterfall . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
8. Sistema eléctrico 105
8.1. El generador eléctrico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
8.1.1. Generador síncrono . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
8.1.2. Generador asíncrono . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
8.2. Justificación de la elección del generador . . . . . . . . . . . . . . . . . . . . . . . . . 106
9. Sistema de regulación y control 109
9.1. Sistema supervisor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
9.1.1. Controlador de lazo cerrado . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
9.2. Sistema de seguridad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
9.3. Sistema de orientación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
9.4. Sistema aerodinámico de control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
6 ÍNDICE GENERAL
10. Estimación de costes 113
10.1. Definiciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
10.2. Aplicación de la inflación y tasas de cambio . . . . . . . . . . . . . . . . . . . . . . . . 114
10.3. Estimación de costes de componentes . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
10.4. Análisis de rentabilidad del aerogenerador diseñado . . . . . . . . . . . . . . . . . . . . 118
11. Estudio adicional: rotor de baja inducción 121
11.1. Diseño de la pala de referencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
11.2. Metodología de cálculo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
11.3. Análisis de resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
12. Resultados y conclusiones 129
12.1. Resumen de resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
12.2. Conclusiones finales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
Bibliografía 133
Índice de figuras
1.1. Formas de aprovechamiento de la energía eólica . . . . . . . . . . . . . . . . . . . . . . 20
1.2. Mix eléctrico en la UE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.3. Proporción de potencia eólica instalada para los países de la UE, a 2013 . . . . . . . . . 23
1.4. Potencia eólica, en GW, instalada en la UE cada año (2000-2013) . . . . . . . . . . . . . 24
2.1. Aerogenerador de James Blyth . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.2. A la izquierda, el aerogenerador de Tvind; a la derecha, el de Charles F. Brush . . . . . 27
2.3. Componentes de un aerogenerador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.1. Distribución de cuerda adimensional . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.2. Distribución de solidez de la pala madre . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4.3. Distribución de torsión geométrica de la pala madre, en radianes . . . . . . . . . . . . . 41
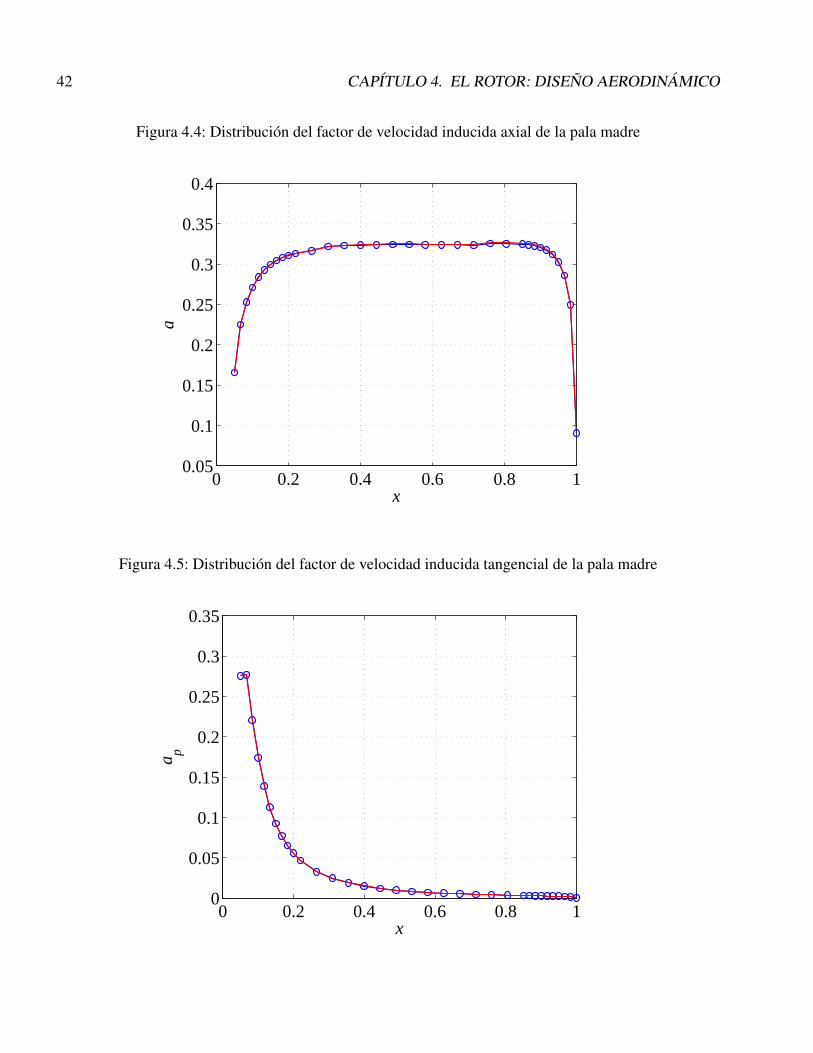
4.4. Distribución del factor de velocidad inducida axial de la pala madre . . . . . . . . . . . 42
4.5. Distribución del factor de velocidad inducida tangencial de la pala madre . . . . . . . . 42
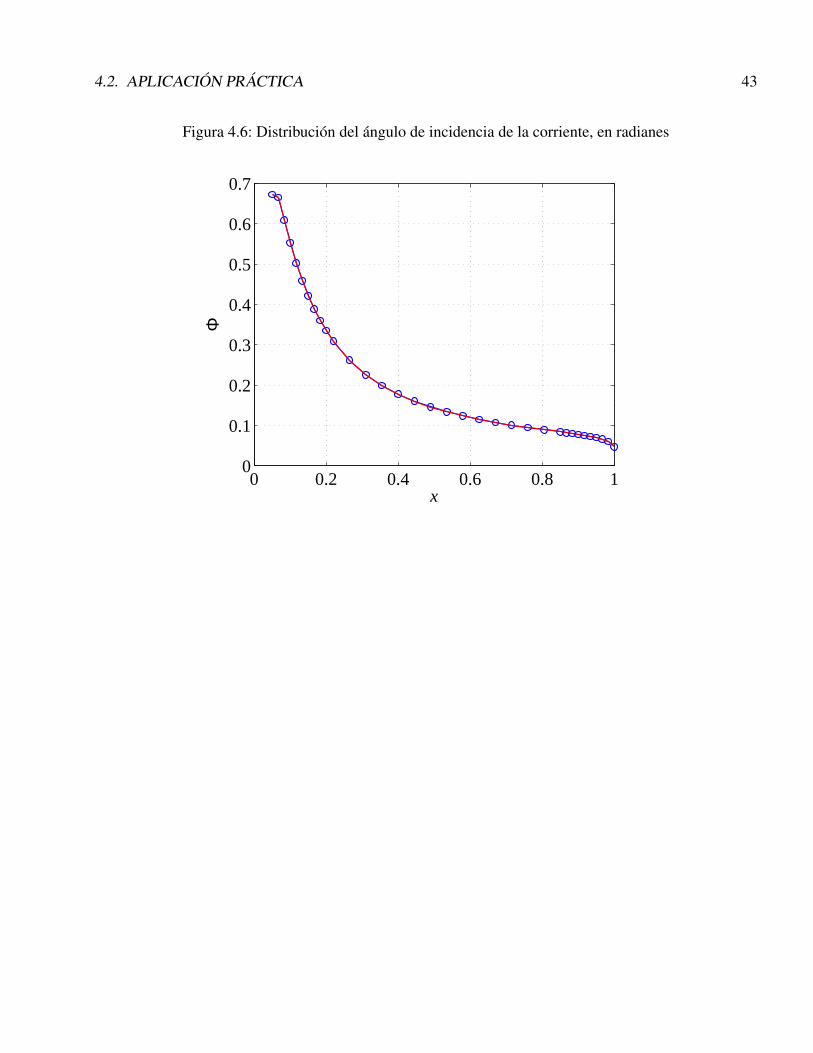
4.6. Distribución del ángulo de incidencia de la corriente, en radianes . . . . . . . . . . . . . 43
5.1. Representación de SP frente al radio, para distintos modelos de aerogeneradores . . . . . 47
5.2. Relación de R frente a VN para el aerogenerador en estudio, incluyendo las limitacionespor ruido y por máxima y mínima SP . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
5.3. Curvas de iso-factor de capacidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
5.4. Curvas de iso-coste de energía . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
5.5. Curvas de iso-par . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
5.6. Ley de cuerdas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
7
8 ÍNDICE DE FIGURAS
5.7. Representación de CT (λ ,θC), con λ en m/s y θC en grados . . . . . . . . . . . . . . . . 55
5.8. Representación de CQ(λ ,θC), con λ en m/s y θC en grados . . . . . . . . . . . . . . . . 56
5.9. Representación de CP(λ ,θC), con λ en m/s y θC en grados . . . . . . . . . . . . . . . . 57
5.10. Curvas CP(U∞) con y sin limitación por ruido . . . . . . . . . . . . . . . . . . . . . . . 58
5.11. Curvas CQ(U∞) con y sin limitación por ruido . . . . . . . . . . . . . . . . . . . . . . . 58
5.12. Curvas de potencia con y sin limitación por ruido . . . . . . . . . . . . . . . . . . . . . 59
5.13. Curvas de par con y sin limitación por ruido . . . . . . . . . . . . . . . . . . . . . . . . 59
5.14. Curvas de velocidad angular con y sin limitación por ruido . . . . . . . . . . . . . . . . 61
5.15. Variación del ángulo de paso de control para las leyes control por paso variable (ramassuperiores) y control por pérdida activa (ramas inferiores), con y sin limitación por ruido 62
6.1. Proporción de masas de los componentes del rotor . . . . . . . . . . . . . . . . . . . . 68
6.2. Proporción de masas de las partes del aerogenerador . . . . . . . . . . . . . . . . . . . 68
6.3. Proporción de masas de los componentes del tren de potencia . . . . . . . . . . . . . . 69
7.1. Sistemas de referencia empleados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
7.2. Estado tensional del refuerzo inferior de borde de salida . . . . . . . . . . . . . . . . . 74
7.3. Estado tensional del refuerzo superior de borde de salida . . . . . . . . . . . . . . . . . 74
7.4. Estado tensional del revestimiento inferior . . . . . . . . . . . . . . . . . . . . . . . . 75
7.5. Estado tensional del revestimiento superior . . . . . . . . . . . . . . . . . . . . . . . . 75
7.6. Estado tensional del larguero delantero del cajón de torsión . . . . . . . . . . . . . . . . 76
7.7. Estado tensional del larguero trasero del cajón de torsión . . . . . . . . . . . . . . . . . 76
7.8. Estado tensional del refuerzo inferior del cajón de torsión . . . . . . . . . . . . . . . . . 77
7.9. Estado tensional del refuerzo superior del cajón de torsión . . . . . . . . . . . . . . . . 77
7.10. Distribución de fuerzas aerodinámicas en ejes H1 . . . . . . . . . . . . . . . . . . . . . 79
7.11. Distribución de momentos aerodinámicos en ejes H1 . . . . . . . . . . . . . . . . . . . 79
7.12. Distribución de fuerzas y momentos aerodinámicos acumulados en ejes H1 . . . . . . . 80
7.13. Distribución de fuerzas y momentos aerodinámicos acumulados en ejes S . . . . . . . . 80
7.14. Fuerzas y momentos aerodinámicos acumulados en el buje en ejes H1 . . . . . . . . . . 81
ÍNDICE DE FIGURAS 9
7.15. Fuerzas y momentos aerodinámicos acumulados en el buje en ejes S . . . . . . . . . . . 81
7.16. Envolvente de fuerzas y momentos aerodinámicos en ejes S . . . . . . . . . . . . . . . 82
7.17. Distribución de fuerzas centrífugos en ejes H1 . . . . . . . . . . . . . . . . . . . . . . 83
7.18. Distribución de momentos centrífugos en ejes H1 . . . . . . . . . . . . . . . . . . . . . 83
7.19. Distribución de fuerzas y momentos centrífugos acumulados en ejes H1 . . . . . . . . . 84
7.20. Distribución de fuerzas y momentos centrífugos acumulados en ejes S . . . . . . . . . . 84
7.21. Fuerzas y momentos centrífugos acumulados en el buje en ejes H1 . . . . . . . . . . . . 85
7.22. Fuerzas y momentos centrífugos acumulados en el buje en ejes S . . . . . . . . . . . . 85
7.23. Distribución de fuerzas y momentos gravitatorios en ejes H1, para azimut ψ = 0 . . . . . 86
7.24. Distribución de fuerzas y momentos gravitatorios en ejes H1, para azimut ψ = 45 . . . . 87
7.25. Distribución de fuerzas y momentos gravitatorios en ejes H1, para azimut ψ = 90 . . . . 87
7.26. Distribución de fuerzas y momentos gravitatorios en ejes H1, para azimut ψ = 180 . . . 88
7.27. Distribución de fuerzas y momentos gravitatorios en ejes H1, para azimut ψ = 270 . . . 88
7.28. Distribución de fuerzas y momentos gravitatorios acumulados en ejes H1 . . . . . . . . 89
7.29. Distribución de fuerzas y momentos gravitatorios acumulados en ejes S . . . . . . . . . 89
7.30. Distribución de fuerzas y momentos gravitatorios acumulados en el buje en ejes H1 . . . 90
7.31. Envolvente de fuerzas y momentos gravitatorios acumulados en el buje en ejes S . . . . 91
7.32. Envolvente de fuerzas y momentos gravitatorios en ejes S . . . . . . . . . . . . . . . . 91
7.33. Envolvente de fuerzas según ejes S . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
7.34. Envolvente de momentos según ejes S . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
7.35. Fuerza y momento resultante en el centro del buje, en ejes H . . . . . . . . . . . . . . . 94
7.36. Comparación entre la potencia aerodinámica y la eléctrica . . . . . . . . . . . . . . . . 94
7.37. Esquema de flexión de pala en batimiento . . . . . . . . . . . . . . . . . . . . . . . . . 96
7.38. Esquema de flexión de pala en arrastre . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
7.39. Modos propios de batimiento para la velocidad de rotación nominal . . . . . . . . . . . 98
7.40. Modos propios de arrastre para velocidad de rotación nominal . . . . . . . . . . . . . . 98
7.41. Variación de la frecuencia propia de batimiento con la velocidad de rotación . . . . . . . 99
7.42. Esquema del movimiento de flexión de la torre . . . . . . . . . . . . . . . . . . . . . . 100
10 ÍNDICE DE FIGURAS
7.43. Representación de los modos propios de la torre . . . . . . . . . . . . . . . . . . . . . . 101
7.44. Detalle del diagrama de Campbell . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
7.45. Diagrama de Waterfall . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
8.1. Vista 3D de un generador de transmisión directa dentro de un aerogenerador . . . . . . . 107
9.1. Ejemplo de lazo de control para una turbina con paso regulado para velocidad fija . . . . 110
10.1. Inflación del dólar estadounidense para el periodo 9/2002 - 5/2014 . . . . . . . . . . . . 115
11.1. Representación de λopt , en m/s, para distintas cuerdas adimensionales . . . . . . . . . . 123
11.2. Representación de θCopt , en radianes, para distintas cuerdas adimensionales . . . . . . . 123
11.3. Representación de CPmax para distintas cuerdas adimensionales . . . . . . . . . . . . . . 124
11.4. Representación de cad para distintas cuerdas adimensionales . . . . . . . . . . . . . . . 125
11.5. Representación de RCPmax para distintas cuerdas adimensionales y radios . . . . . . . . 125
11.6. Representación de a para distintas cuerdas adimensionales y radios . . . . . . . . . . . . 126
11.7. Representación de P para distintas cuerdas adimensionales y radios . . . . . . . . . . . . 126
11.8. Representación de MB para distintas cuerdas adimensionales y radios . . . . . . . . . . 127
12.1. Parámetros de Weibull en parte del Mar del Norte . . . . . . . . . . . . . . . . . . . . . 131
Índice de cuadros
2.1. Comparación básica de aerogeneradores de gran potencia . . . . . . . . . . . . . . . . . 30
3.1. Clasificación de aerogeneradores según emplazamiento . . . . . . . . . . . . . . . . . . 32
4.1. Comparativa de perfiles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.2. Resultados de la primera prueba con una pala madre de prueba . . . . . . . . . . . . . . 38
4.3. Resultados con una pala madre con dos tramos . . . . . . . . . . . . . . . . . . . . . . 38
4.4. Resultados finales (pala madre elegida) . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.5. Parámetros óptimos de la pala madre . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
5.1. Datos del aerogenerador en estudio para el dimensionado del rotor . . . . . . . . . . . . 46
5.2. Representación de PN frente al radio, para distintos modelos de aerogeneradores . . . . 47
5.3. Radios y velocidades de viento nominales para limitaciones por SP y ruido . . . . . . . 49
5.4. Tramos de operación para el radio escogido . . . . . . . . . . . . . . . . . . . . . . . . 50
5.5. Cuerdas más representativas y sección en la que aparecen . . . . . . . . . . . . . . . . 53
5.6. Valores de coeficiente de par máximo CQmax, y parámetro de operación λ y ángulo depaso de control θC asociados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
5.7. Valores de coeficiente de potencia máximo CPmax, y parámetro de operación λ y ángulode paso de control θC asociados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
5.8. Valores característicos de la curva Ω(U∞) . . . . . . . . . . . . . . . . . . . . . . . . . 61
5.9. Resumen de características del aerogenerador . . . . . . . . . . . . . . . . . . . . . . . 63
6.1. Datos de entrada para la estimación de masas de componentes . . . . . . . . . . . . . . 65
6.2. Estimación de masas de componentes . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
11
12 ÍNDICE DE CUADROS
7.1. Propiedades de los materiales utilizados en la pala . . . . . . . . . . . . . . . . . . . . 73
7.2. Espesores relativos de material compuesto en la pala . . . . . . . . . . . . . . . . . . . 73
7.3. Características de la torre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
7.4. Frecuencias propias en batimiento y arrastre . . . . . . . . . . . . . . . . . . . . . . . . 97
7.5. Frecuencias propias de la torre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
10.1. Estimación de costes del aerogenerador . . . . . . . . . . . . . . . . . . . . . . . . . . 116
10.2. Estimación de costes de la estación onshore y de su operación . . . . . . . . . . . . . . 117
10.3. Estimación de costes de la estación offshore y de su operación . . . . . . . . . . . . . . 117
10.4. Cálculo del COE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
10.5. Rangos de COE en función de su origen . . . . . . . . . . . . . . . . . . . . . . . . . . 118
11.1. Características del rotor de baja inducción . . . . . . . . . . . . . . . . . . . . . . . . . 122
Nomenclatura
α Ángulo de ataque del perfil
δ Espesor de la torre
γ Factor de seguridad
λ Parámetro de operación
λopt Parámetro de operación óptimo
µE Rendimiento eléctrico
µM Rendimiento mecánico
ΩRNL Velocidad máxima de punta de pala debido a la limitación por ruido
Ω Velocidad de giro del rotor
ω Frecuencia propia
ΩN Velocidad nominal de giro del rotor
ΩNL Velocidad de giro del rotor limitada por ruido
Φ Ángulo de incidencia de la corriente
Ψ Ángulo de acimut de la pala
ρ Densidad
σ Solidez local de la pala
σUC Resistencia última a compresión
σUT Resistencia última a tracción
13
14 ÍNDICE DE CUADROS
θ Ángulo de paso
θC Ángulo de paso de control
θG Ángulo de torsión geométrica
θCopt Ángulo óptimo de paso de control
a Factor de velocidad inducida axial medio
MB Momento flector medio
P Potencia media
cd Coeficiente de resistencia de un perfil
cl Coeficiente de sustentación de un perfil
CM Coeficiente de momento
CP Coeficiente de potencia
CQ Coeficiente de par
CT Coeficiente de tracción
FΩ Fuerza centrífuga
Fa Fuerza aerodinámica
Fg Fuerza gravitatoria
fr Factor de pérdidas en la raíz
ft Factor de pérdidas en la punta
g Aceleración de la gravedad
MΩ Momento debido a las fuerzas centrífugas
Ma Momento debido a las fuerzas aerodinámicas
Mg Momento debido a las fuerzas gravitatorias
PN Potencia nominal
Uınf Velocidad incidente
ÍNDICE DE CUADROS 15
VN Velocidad nominal del viento incidente
VΩN Velocidad incidente a partir de la cual la velocidad de rotación del rotor es constante
Vin Velocidad incidente de arranque
VN0 Velocidad incidente nominal en el caso de no tener limitación por ruido
Vout Velocidad incidente de corte
W Modo propio
a Factor de velocidad inducida axial
a’ Factor de velocidad inducida tangencial
b Número de palas
c Factor de escala de Weibull; cuerda
E Módulo elástico
f Frecuencia propia
FC Factor de capacidad
G Rigidez a cortadura
h Altura
k Parametro de Weibull; Eficiencia aerodinámica del perfil
P Frecuencia fundamental de rotación
Q Par
R Radio del rotor
SP Potencia específica
t Tiempo
t/c Espesor del perfil
x Radio adimensional
z Altura sobre el suelo
16 ÍNDICE DE CUADROS
AEP Producción anual de energía (Net Annual Energy Production)
AOE Gastos anuales de operación (Annual Operating Expenses)
BLC Coste de arrendamiento de fondo marino (Sea Bottom Lease Cost)
BOS Balance de la estación (Balance Of Station)
CCP Control por cambio de paso
CEP Control por entrada en pérdida
CFRP Material compuesto de fibra de carbono (Carbon Fiber Reinforced Plastic)
COE Coste de la energía (Cost Of Energy)
CPA Control por cambio de paso activo
DU Universidad de Delft (Delft University)
EPA Control por entrada en pérdida activa
FCR Tasa de cargo fija (Fixed Charge Rate)
GRP Material compuesto de fibra de vidrio (Glass Fiber Reinforced Plastic)
ICC Coste de capital inicial (Initial Capital Cost)
IEC Comisión Electrotécnica Internacional (International Electrotechnical Comission)
LLC Coste de arrendamiento del terreno (Land Lease Cost)
LRC Coste medio de sustitución o reemplazo (Levelized Replacement/Overhaul Cost)
NACA Comité Consultivo Nacional de Aeronáutica (National Advisory Committee for Aeronautics)
NREL National Renewable Energy Laboratory
O&M Coste medio de operaciones y mantenimiento (Levelized Operations & Maintenance Cost)
TCM Teoría de la Cantidad de Movimiento
TEP Teoría del Elemento de Pala
WindPACT Wind Partnerships for Advanced Component Technology
Prólogo
El presente proyecto tiene por objetivo realizar el diseño preliminar conceptual de un aerogenerador de 20MW, basándose principalmente en estudios aerodinámicos, de cargas, vibraciones y materiales. Se ana-lizarán también distintas alternativas del sistema eléctrico y de control, y se dispondrá finalmente de unaestimación de costes del aerogenerador en función de los resultados de todos los estudios mencionados.
En la actualidad, la máquina más grande existente tiene una potencia nominal menor de la mitad dela del aerogenerador que aquí se propone. A pesar de haber tomado decisiones a lo largo del proyectocon criterios de diseño contrastados con informes y libros de expertos de la industria eólica, no existensuficientes estudios de dominio público que permitan realizar un cálculo preciso para un aerogeneradorde semejante potencia, por lo que ha sido necesario tomar soluciones de compromiso entre los cálculosrealizados y extrapolaciones, siempre razonando las decisiones tomadas.
Como condiciones de emplazamiento para el aerogenerador que aquí se diseña, se tiene una distribuciónde viento de Weibull con parámetros k=1.5 y c=8 m/s. Además, se impone una limitación de ruido,impidiendo que la punta de pala tenga una velocidad superior a 80 m/s. El proyecto culmina con uncapítulo dedicado a valorar los resultados y a estudiar las implicaciones de las restricciones de diseño.
Finalmente, se ha incluido un capítulo adicional sobre el rotor de baja inducción, para analizar el efectoque tiene aumentar el radio de pala y disminuir la cuerda sobre las características del aerogenerador.Para este capítulo, se utiliza un aerogenerador completamente diferente al del proyecto, pero igualmenteoptimizado para rendimiento óptimo.
17

18 ÍNDICE DE CUADROS
Capítulo 1
La energía eólica
En este capítulo se expone la situación, tanto global como nacional, de la industria y generación corres-pondientes al sector eólico, acudiendo primeramente a las definiciones más básicas y planteando ventajase inconvenientes frente a otros tipos de energía.
1.1. ¿Qué es la energía eólica?
La energía eólica se define como la energía cinética generada por efecto de las corrientes de aire. Es-ta energía cinética se convierte mediante diversos dispositivos en otros tipos de energía aprovechablesdirectamente por el ser humano, por ejemplo:
En el movimiento de los barcos de vela.
En energía mecánica para molienda, utilizando molinos de viento.
En energía hidráulica para bombear agua, empleando bombas de agua eólicas.
En electricidad, mediante el uso de aerogeneradores. Éste es el uso que se analiza en el presenteProyecto de Fin de Carrera.
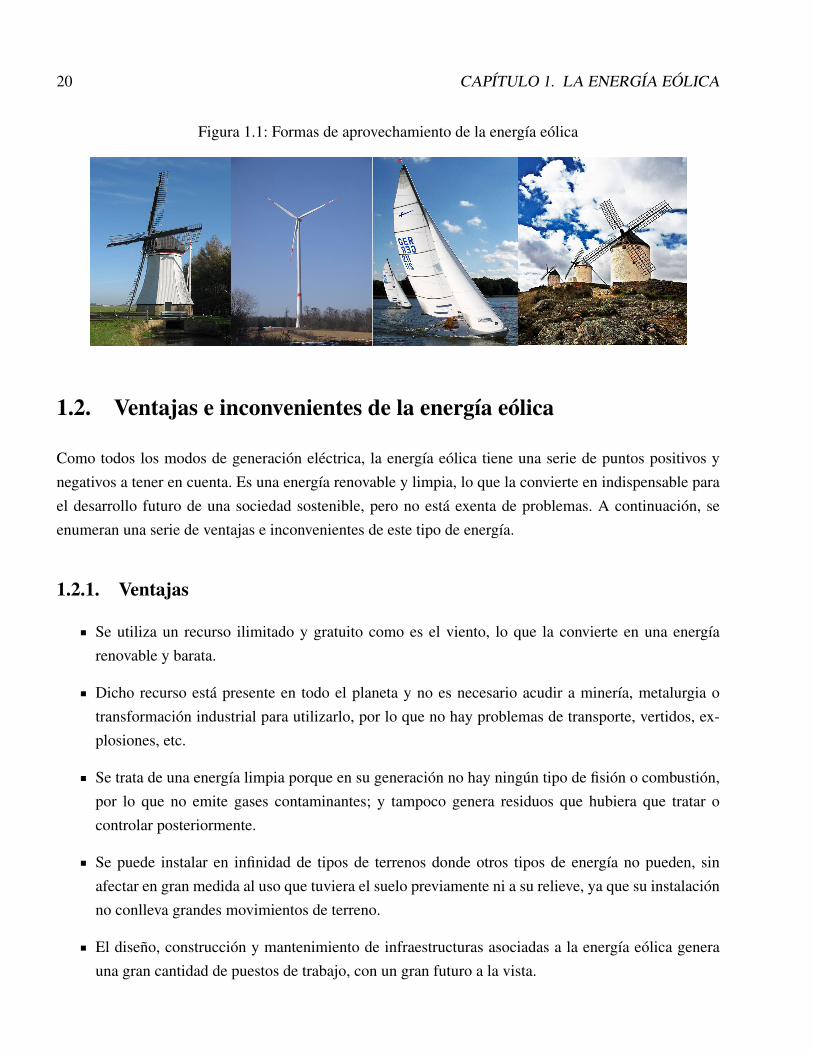
La figura 1.1 muestra, de izquierda a derecha: una bomba de agua eólica, un aerogenerador, un barco devela y molinos de viento.
19
20 CAPÍTULO 1. LA ENERGÍA EÓLICA
Figura 1.1: Formas de aprovechamiento de la energía eólica
1.2. Ventajas e inconvenientes de la energía eólica
Como todos los modos de generación eléctrica, la energía eólica tiene una serie de puntos positivos ynegativos a tener en cuenta. Es una energía renovable y limpia, lo que la convierte en indispensable parael desarrollo futuro de una sociedad sostenible, pero no está exenta de problemas. A continuación, seenumeran una serie de ventajas e inconvenientes de este tipo de energía.
1.2.1. Ventajas
Se utiliza un recurso ilimitado y gratuito como es el viento, lo que la convierte en una energíarenovable y barata.
Dicho recurso está presente en todo el planeta y no es necesario acudir a minería, metalurgia otransformación industrial para utilizarlo, por lo que no hay problemas de transporte, vertidos, ex-plosiones, etc.
Se trata de una energía limpia porque en su generación no hay ningún tipo de fisión o combustión,por lo que no emite gases contaminantes; y tampoco genera residuos que hubiera que tratar ocontrolar posteriormente.
Se puede instalar en infinidad de tipos de terrenos donde otros tipos de energía no pueden, sinafectar en gran medida al uso que tuviera el suelo previamente ni a su relieve, ya que su instalaciónno conlleva grandes movimientos de terreno.
El diseño, construcción y mantenimiento de infraestructuras asociadas a la energía eólica generauna gran cantidad de puestos de trabajo, con un gran futuro a la vista.
1.3. SITUACIÓN GLOBAL DE LA ENERGÍA EÓLICA 21
Se pueden aprovechar los excedentes de viento para vender energía a otro país, generar hidrógenoo activar bombas para rellenar embalses, entre otros, todo ello sin gastar recursos adicionales.
1.2.2. Inconvenientes
El viento es incontrolable y poco predecible, por lo que no puede utilizarse como única fuente degeneración y presenta problemas en la planificación diaria de los sistemas eléctricos. Además, lascorrientes no tienen la misma intensidad en todos el planeta, por lo que hay sitios del mundo en losque este tipo de energía es inadecuada.
Su variabilidad instantánea provoca bajadas de tensión que hay que compensar activando centralestérmicas, que son contaminantes.
No es posible almacenar la producción, el consumo es instantáneo y lo que no se consume sepierde.
El hecho de que puedan situarse en zonas remotas conlleva una necesidad de infraestructuras muygrandes, con el costo y pérdida de energía en el transporte asociados.
Son necesarios estudios medioambientales porque causan una modificación del paisaje considera-ble y pueden poner en peligro las rutas de aves migratorias.
1.3. Situación global de la energía eólica
Según el informe [8], a mitad de 2013 había una potencia eólica instalada de 296 GW en todo el planeta,estando concentrado el 73% en cinco países: China, EEUU, Alemania, España e India.
1.3.1. La energía eólica en Europa
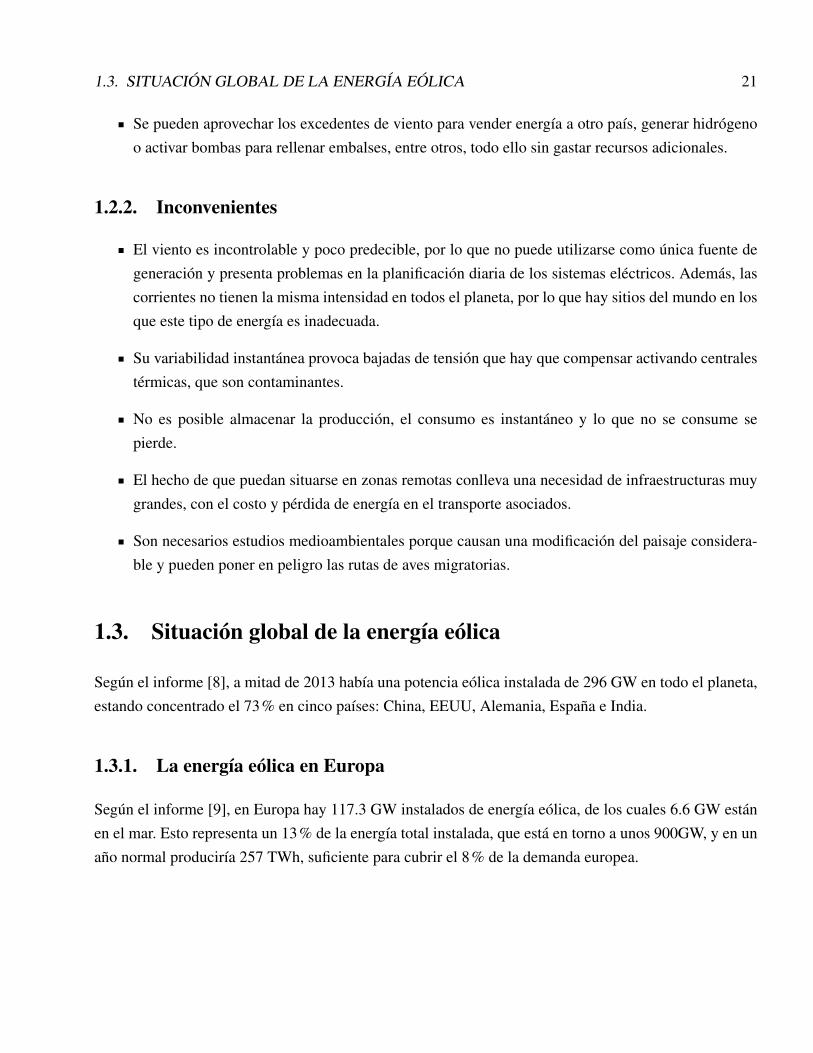
Según el informe [9], en Europa hay 117.3 GW instalados de energía eólica, de los cuales 6.6 GW estánen el mar. Esto representa un 13% de la energía total instalada, que está en torno a unos 900GW, y en unaño normal produciría 257 TWh, suficiente para cubrir el 8% de la demanda europea.
22 CAPÍTULO 1. LA ENERGÍA EÓLICA
Figura 1.2: Mix eléctrico en la UE
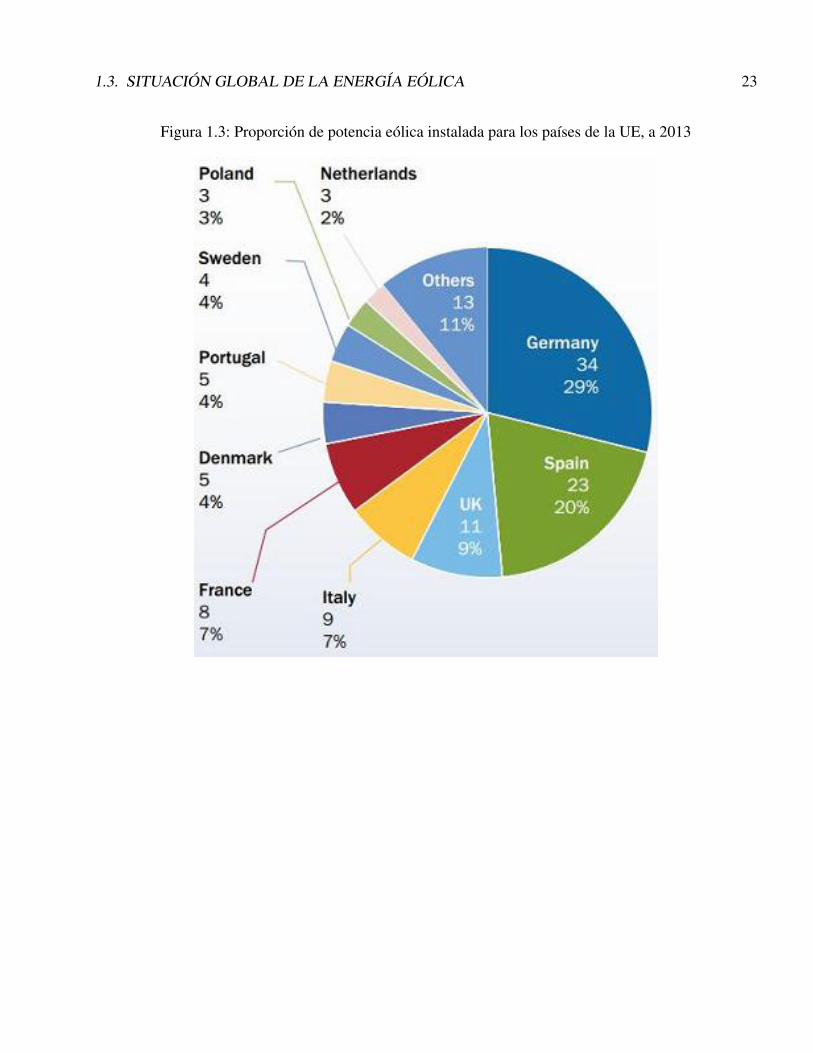
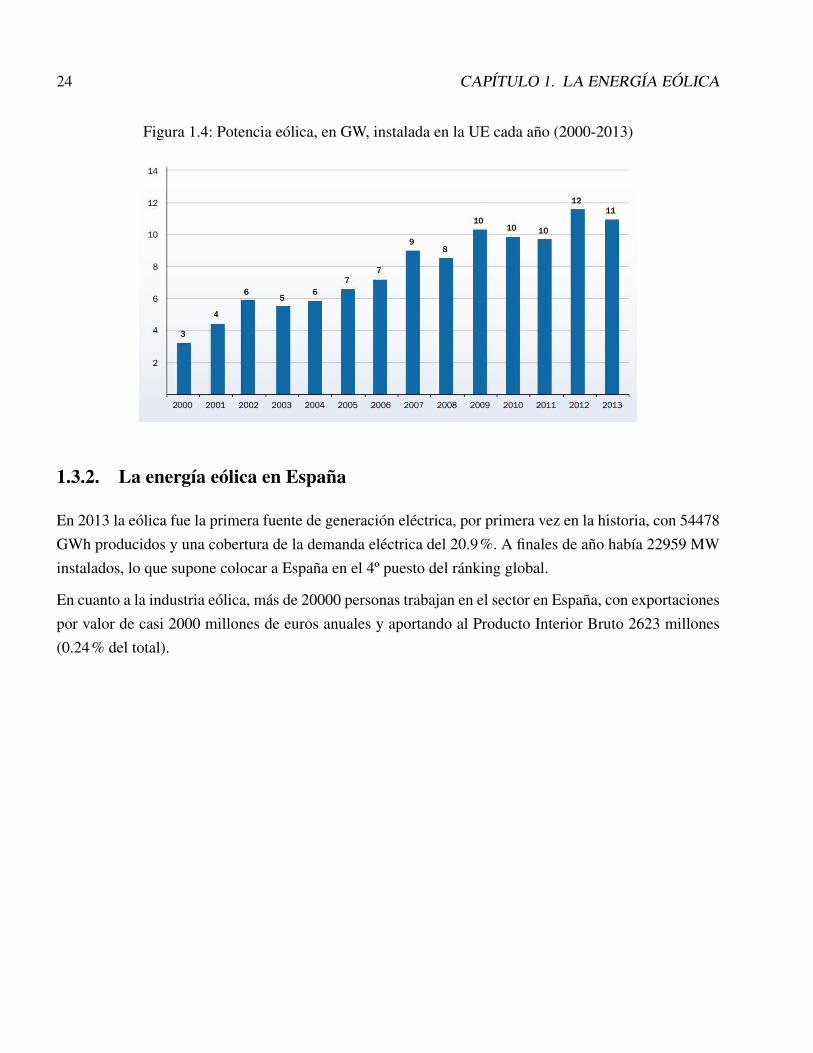
La instalación de parques eólicos en Europa se viene haciendo en incrementos de aproximadamente 10GW anuales en el último lustro, siendo protagonistas en 2013 Alemania y el Reino Unido, acaparandocasi la mitad de las nuevas instalaciones. En cambio, países que antaño tenían una industria eólica fuertecomo España, Italia y Francia han experimentado descensos en instalaciones de parques eólicos del 84%,65% y 24%, respectivamente, de 2012 a 2013.
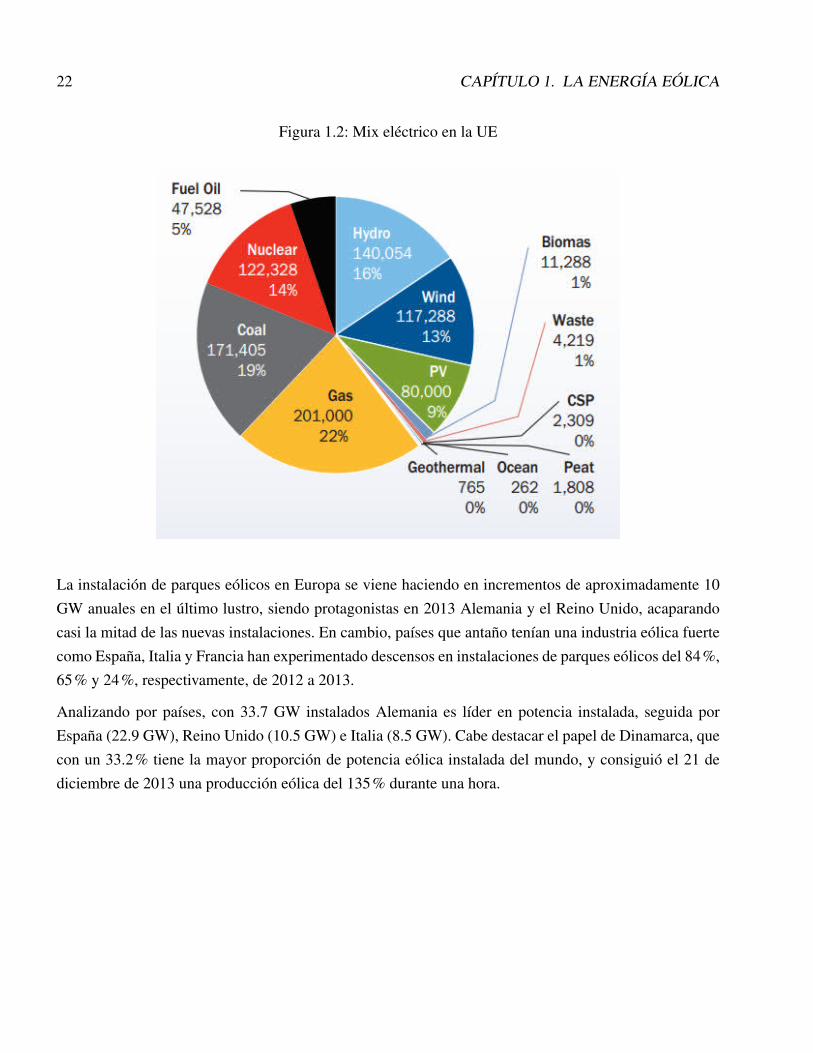
Analizando por países, con 33.7 GW instalados Alemania es líder en potencia instalada, seguida porEspaña (22.9 GW), Reino Unido (10.5 GW) e Italia (8.5 GW). Cabe destacar el papel de Dinamarca, quecon un 33.2% tiene la mayor proporción de potencia eólica instalada del mundo, y consiguió el 21 dediciembre de 2013 una producción eólica del 135% durante una hora.
1.3. SITUACIÓN GLOBAL DE LA ENERGÍA EÓLICA 23
Figura 1.3: Proporción de potencia eólica instalada para los países de la UE, a 2013
24 CAPÍTULO 1. LA ENERGÍA EÓLICA
Figura 1.4: Potencia eólica, en GW, instalada en la UE cada año (2000-2013)
1.3.2. La energía eólica en España
En 2013 la eólica fue la primera fuente de generación eléctrica, por primera vez en la historia, con 54478GWh producidos y una cobertura de la demanda eléctrica del 20.9%. A finales de año había 22959 MWinstalados, lo que supone colocar a España en el 4º puesto del ránking global.
En cuanto a la industria eólica, más de 20000 personas trabajan en el sector en España, con exportacionespor valor de casi 2000 millones de euros anuales y aportando al Producto Interior Bruto 2623 millones(0.24% del total).
Capítulo 2
El aerogenerador
Un aerogenerador es una máquina que genera electricidad a partir de la energía cinética del viento. Eneste capítulo se expondrá con brevedad la historia de estos artilugios, se describirán los distintos tipos deaerogeneradores y se enumerarán los componentes básicos que los conforman. Finalmente, se analizarábrevemente el estado del arte con mayor semejanza al estudiado en el presente proyecto.
2.1. Historia
En la Antigüedad, el uso primario de la energía del viento era para transporte marítimo, con el simpleempuje sobre las velas. No fue hasta Herón de Alejandría (s. I) que se creó la primera maquina confuncionamiento a base de energía eólica transformada, mediante mecanismos rotatorios.
Los primeros molinos para molienda de maíz y bombeo de agua aparecieron en Irán en torno al sigloVIII, llegando cuatro siglos después al norte de Europa, para molienda de harina, algunos de los cualesexisten todavía. En esta época la dinastía abasí en Bagdad llegó a utilizar el viento para crear estatuasmóviles, para espectáculo de su pueblo. Ya a finales de la Edad Media los holandeses empiezan a utilizarmolinos para bombear agua en el delta del Rin.
25
26 CAPÍTULO 2. EL AEROGENERADOR
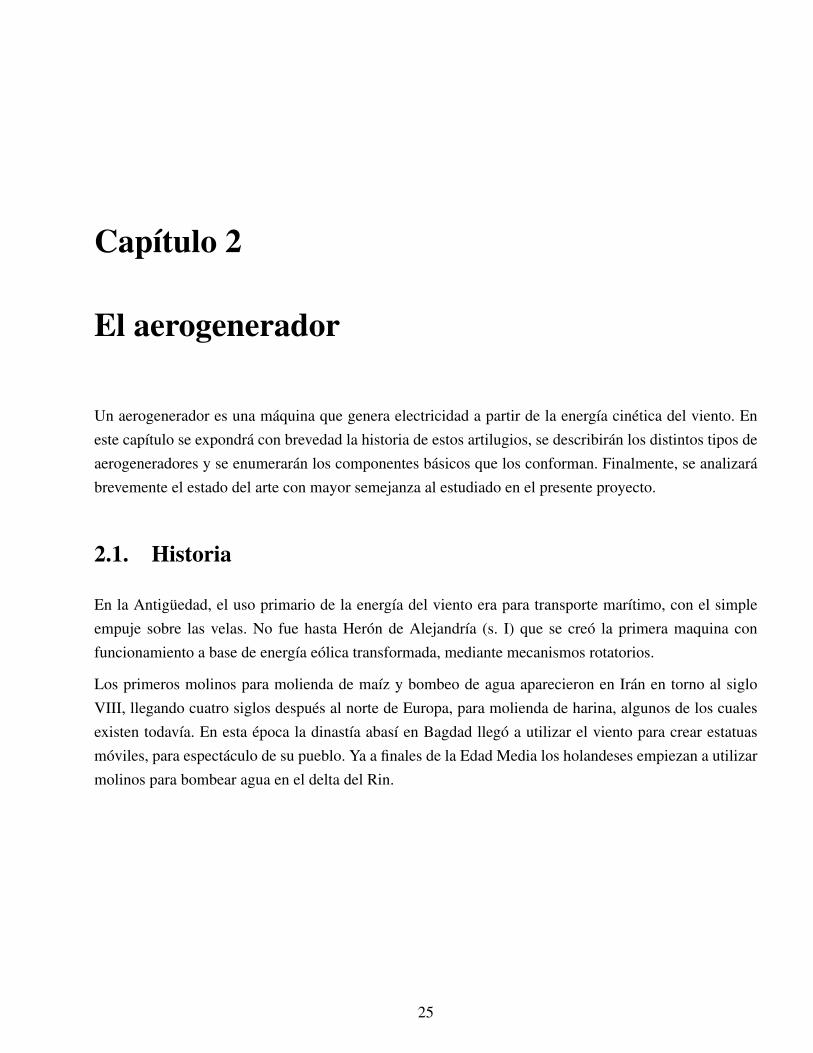
Figura 2.1: Aerogenerador de James Blyth
El primer molino utilizado para producción de electricidad fue construido en Escocia en 1887 por JamesBlyth (foto en la figura 2.1). Con diez metros de altura y construido en el jardín de su residencia deverano, lo utilizaba para cargar acumuladores que luego proveían de luz a su hogar, convirtiéndose así enla primera casa del mundo en tener electricidad con origen eólico. Poco tiempo después, en Cleveland(EEUU), Charles F. Brush construyó una turbina de 17 metros de diámetro y 144 palas, con una potenciade 12 kW que le sirvió durante 15 años hasta la generalización de la electricidad distribuida por la zona.
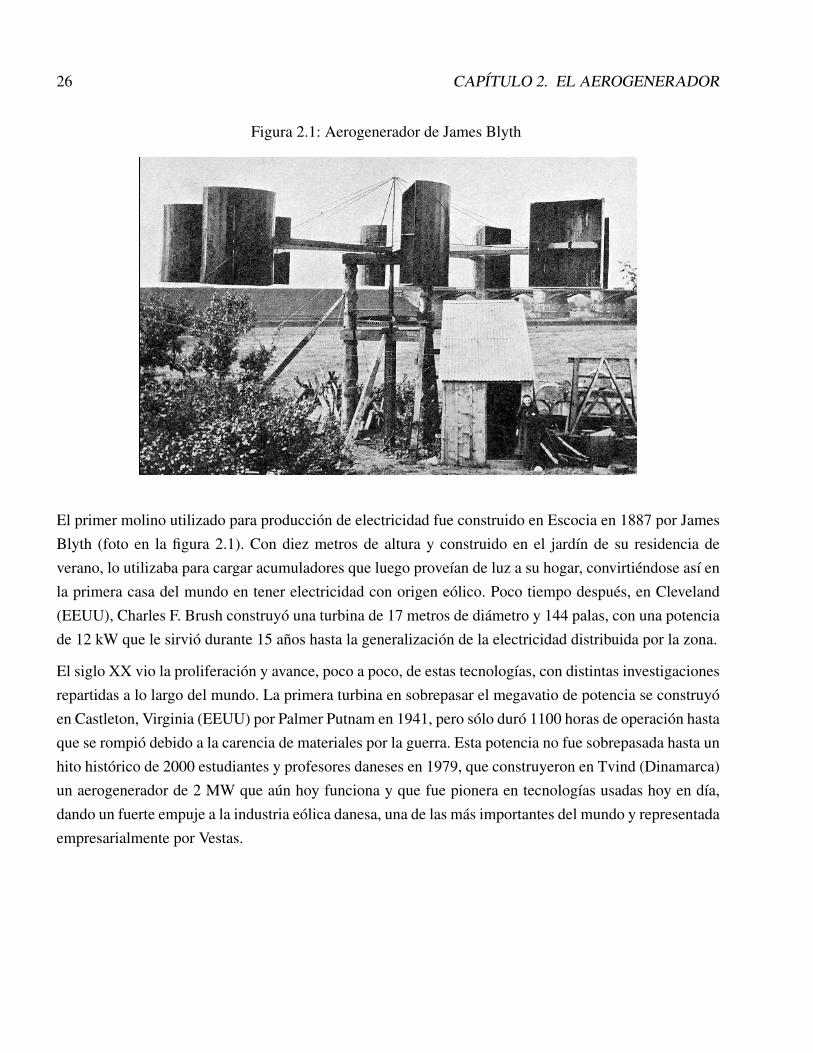
El siglo XX vio la proliferación y avance, poco a poco, de estas tecnologías, con distintas investigacionesrepartidas a lo largo del mundo. La primera turbina en sobrepasar el megavatio de potencia se construyóen Castleton, Virginia (EEUU) por Palmer Putnam en 1941, pero sólo duró 1100 horas de operación hastaque se rompió debido a la carencia de materiales por la guerra. Esta potencia no fue sobrepasada hasta unhito histórico de 2000 estudiantes y profesores daneses en 1979, que construyeron en Tvind (Dinamarca)un aerogenerador de 2 MW que aún hoy funciona y que fue pionera en tecnologías usadas hoy en día,dando un fuerte empuje a la industria eólica danesa, una de las más importantes del mundo y representadaempresarialmente por Vestas.
2.2. TIPOS DE AEROGENERADORES 27
Figura 2.2: A la izquierda, el aerogenerador de Tvind; a la derecha, el de Charles F. Brush
La crisis del petróleo y la necesidad estratégica de evitar el uso de energías no renovables han aupadoa la energía eólica a una posición privilegiada en las últimas décadas, con Dinamarca, España, EEUU yAlemania como países abanderados de la industria, a los que ya se están uniendo los BRICS. Se tiende aconstruir aerogeneradores en el mar, con tamaños cada vez más grandes y, en un futuro cercano, superarlos 10 MW de potencia.
2.2. Tipos de aerogeneradores
Los aerogeneradores se pueden clasificar en dos tipos, en función de la posición del eje de giro conrespecto al viento:
Aerogeneradores de eje vertical
Aerogeneradores de eje horizontal
2.2.1. Aerogeneradores de eje vertical
Denominados VAWT (del inglés, Vertical Axis Wind Turbine), son aerogeneradores cuyo eje de rotaciónes perpendicular al suelo. No precisan de torre para elevar el buje, por lo que la instalación y manteni-
28 CAPÍTULO 2. EL AEROGENERADOR
miento se simplifica respecto a los de eje horizontal. Además, no requieren mecanismos de orientaciónrespecto al viento, puesto que funcionan en cualquier dirección. A pesar de estas ventajas, al extraerse laenergía cerca del suelo, donde la velocidad del viento es baja, su eficiencia es menor.
2.2.2. Aerogeneradores de eje horizontal
Conocidos como HAWT (del inglés, Horizontal Axis Wind Turbine), son aerogeneradores cuyo eje derotación es paralelo al suelo. Son más eficientes que los de eje vertical y pueden adaptarse a distintas po-tencias, por lo que son los mayoritariamente empleados. En este caso, se suele requerir de un mecanismode orientación puesto que funcionan cuando el viento sopla en la dirección del eje, bien incidiendo pordelante contra las palas (a barlovento), bien por detrás contra la góndola y las palas (a sotavento).
2.3. Componentes de un aerogenerador
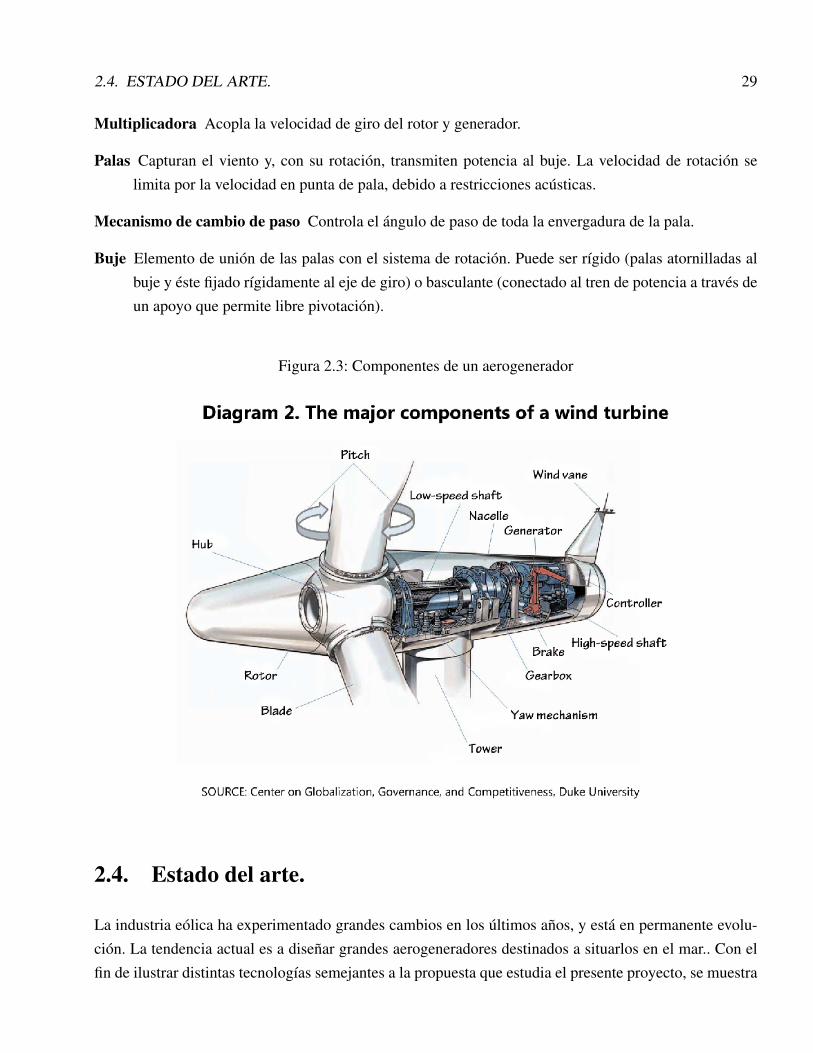
Los componentes de un aerogenerador se enumeran a continuación, con la mayoría de ellos señalados enla figura 2.3.
Cimentación Sujeción a tierra del aerogenerador, elemento de unión entre torre y terreno, que soportatodas las cargas estáticas y dinámicas del conjunto.
Salida eléctrica Conexión del aerogenerador a la red eléctrica.
Torre Sitúa a gran altura el aerogenerador, para aprovechar la mayor intensidad del viento. También seencarga de transmitir las cargas del rotor al suelo.
Escalera interior Concede acceso a la góndola para revisiones y mantenimiento.
Sistema de orientación Su misión es orientar las palas de modo que el eje de rotación quede perpendi-cular al viento, para aprovechar al máximo la capacidad energética del mismo.
Góndola Aloja los sistemas y equipos del aerogenerador.
Generador Componente principal del sistema eléctrico, genera energía eléctrica con la rotación del eje.
Anemómetro y veleta Permiten conocer intensidad y dirección del viento, para poder optimizar la orien-tación del aerogenerador.
Freno de control Mantiene bloqueado el eje de giro durante las operaciones de puesta en marcha ymantenimiento.
2.4. ESTADO DEL ARTE. 29
Multiplicadora Acopla la velocidad de giro del rotor y generador.
Palas Capturan el viento y, con su rotación, transmiten potencia al buje. La velocidad de rotación selimita por la velocidad en punta de pala, debido a restricciones acústicas.
Mecanismo de cambio de paso Controla el ángulo de paso de toda la envergadura de la pala.
Buje Elemento de unión de las palas con el sistema de rotación. Puede ser rígido (palas atornilladas albuje y éste fijado rígidamente al eje de giro) o basculante (conectado al tren de potencia a través deun apoyo que permite libre pivotación).
Figura 2.3: Componentes de un aerogenerador
2.4. Estado del arte.
La industria eólica ha experimentado grandes cambios en los últimos años, y está en permanente evolu-ción. La tendencia actual es a diseñar grandes aerogeneradores destinados a situarlos en el mar.. Con elfin de ilustrar distintas tecnologías semejantes a la propuesta que estudia el presente proyecto, se muestra
30 CAPÍTULO 2. EL AEROGENERADOR
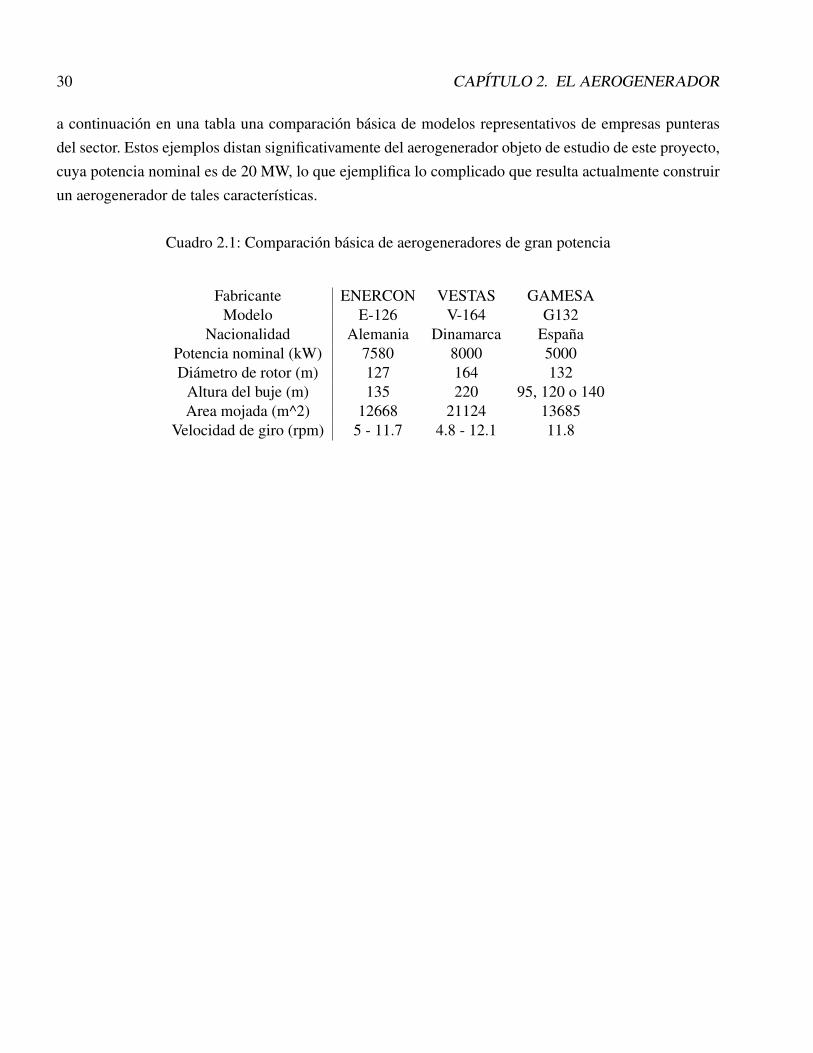
a continuación en una tabla una comparación básica de modelos representativos de empresas punterasdel sector. Estos ejemplos distan significativamente del aerogenerador objeto de estudio de este proyecto,cuya potencia nominal es de 20 MW, lo que ejemplifica lo complicado que resulta actualmente construirun aerogenerador de tales características.
Cuadro 2.1: Comparación básica de aerogeneradores de gran potencia
Fabricante ENERCON VESTAS GAMESAModelo E-126 V-164 G132
Nacionalidad Alemania Dinamarca EspañaPotencia nominal (kW) 7580 8000 5000Diámetro de rotor (m) 127 164 132
Altura del buje (m) 135 220 95, 120 o 140Area mojada (m^2) 12668 21124 13685
Velocidad de giro (rpm) 5 - 11.7 4.8 - 12.1 11.8
Capítulo 3
La norma IEC 61400
La norma IEC 61400 es una clase de estándar internacional de la Comisión Electrotécnica Internacional,que comprende requerimientos de diseño para asegurar que los aerogeneradores están correctamentediseñados, y así prevenir potenciales riesgos a lo largo del ciclo de vida previsto. Abarca la mayoría delos aspectos la vida del generador, desde condiciones de la localización previas a la construcción, hastalos ensayos de los componentes.
La normativa provee condiciones técnicas verificables por terceros, lo cual es necesario para realizaracuerdos comerciales que permiten financiar, construir y poner en servicio los aerogeneradores.
Esta norma se subdivide en capítulos, cada cual aplicable a distintos aspectos del aerogenerador:
IEC 61400-1: Requerimientos de diseño.
IEC 61400-2: Aerogeneradores pequeños.
IEC 61400-3: Requerimientos de diseño para aerogeneradores offshore.
IEC 61400-4: Requerimientos de diseño para transmisiones de aerogeneradores.
IEC 61400-5: Palas de aerogeneradores.
IEC 61400-11: Técnicas de medición de ruido acústico.
IEC 61400-12: Ensayos de rendimiento de potencia de aerogeneradores.
IEC 61400-13: Medición de cargas mecánicas.
IEC 61400-14: Declaración de nivel potencia de sonido aparente y valores de tonalidad.
31
32 CAPÍTULO 3. LA NORMA IEC 61400
Cuadro 3.1: Clasificación de aerogeneradores según emplazamiento
Clase del aerogenerador I II III SVre f [m/s] 50 42.5 37.5
Valores especificados por el diseñadorA - Ire f 0.16B - Ire f 0.14C - Ire f 0.12
IEC 61400-21: Medición y evaluación de características de calidad de potencia de aerogeneradoresconectados a la red.
IEC 61400-22: Certificación y ensayos de conformidad.
IEC 61400-23: Ensayos estructurales a escala completa de palas del rotor.
IEC 61400-24: Protección antirrayos.
IEC 61400-25: Protocolo de comunicaciones.
IEC 61400-26: Disponibilidad basada en el tiempo de los aerogeneradores.
IEC 61400-27: Modelos de simulación eléctrica para generación de aerogeneradores.
Este capítulo versa exclusivamente sobre los requerimientos de diseño, la norma IEC 61400-1.
3.1. La clase del aerogenerador
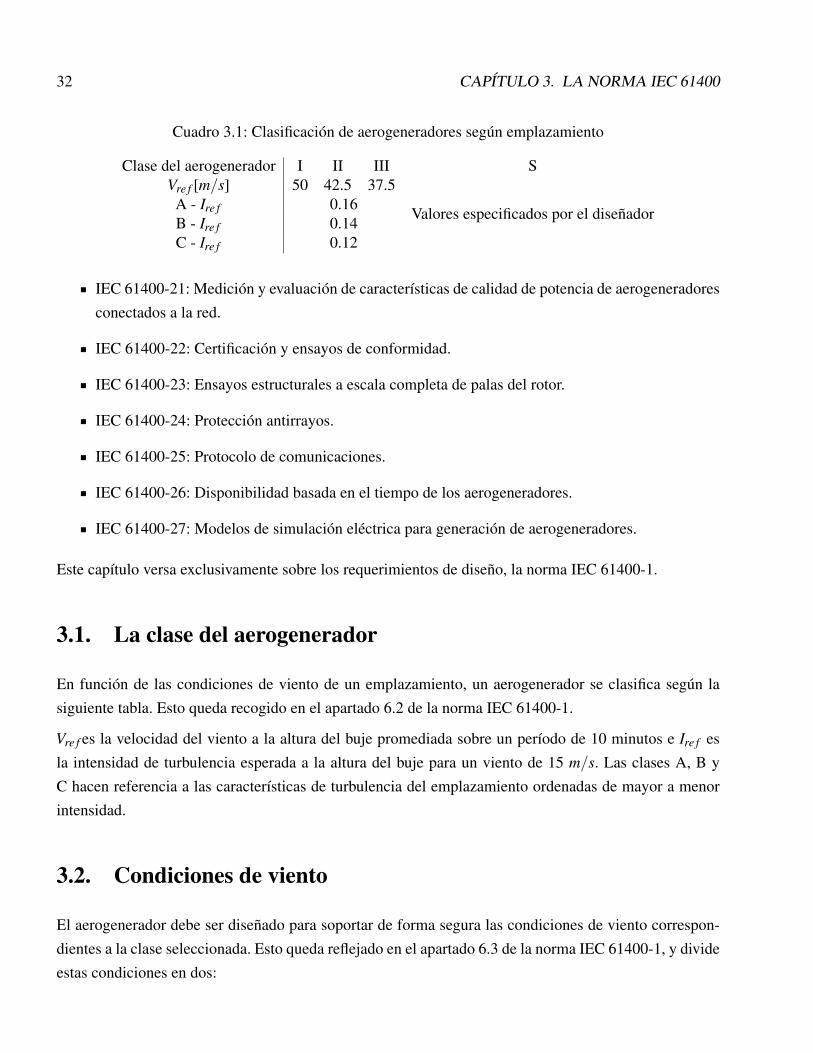
En función de las condiciones de viento de un emplazamiento, un aerogenerador se clasifica según lasiguiente tabla. Esto queda recogido en el apartado 6.2 de la norma IEC 61400-1.
Vre f es la velocidad del viento a la altura del buje promediada sobre un período de 10 minutos e Ire f esla intensidad de turbulencia esperada a la altura del buje para un viento de 15 m/s. Las clases A, B yC hacen referencia a las características de turbulencia del emplazamiento ordenadas de mayor a menorintensidad.
3.2. Condiciones de viento
El aerogenerador debe ser diseñado para soportar de forma segura las condiciones de viento correspon-dientes a la clase seleccionada. Esto queda reflejado en el apartado 6.3 de la norma IEC 61400-1, y divideestas condiciones en dos:
3.3. OTRAS CONDICIONES AMBIENTALES 33
Condiciones normales: aquellas que ocurren de forma frecuente durante la operación normal delaerogenerador. Para su estudio, se propone seguir los siguientes modelos:
• Distribución de velocidad del viento.
• Modelo del perfil normal del viento.
• Modelo de turbulencia normal.
Condiciones extremas: incluyen situaciones de viento infrecuentes pero peligrosas, que puedenocurrir con un período de recurrencia de entre 1 y 50 años. En este caso, los modelos propuestosson:
• Modelo de velocidad de viento extrema.
• Ráfaga máxima operativa.
• Modelo de turbulencia extrema.
• Cambio de dirección extrema.
• Ráfaga máxima coherente con cambio de dirección.
• Viento cortante extremo.
Estas condiciones incluyen un flujo de viento constante combinado con perfiles de ráfagas variablescalculados como variación aleatoria en la velocidad del viento en un promedio de 10 minutos.
3.3. Otras condiciones ambientales
En el apartado 6.4 de la norma IEC 61400-1 se establecen otras situaciones que hay que observar paragarantizar la seguridad e integridad del aerogenerador.
Condiciones ambientales normales:
• Temperaturas en el rango de -10ºC a +40ºC.
• Humedad relativa por debajo del 95%.
• Atmósfera equivalente a la de una atmósfera interior no contaminada.
• Intensidad de radiación solar de 1000 W/m2.
• Densidad del aire de 1225 kg/m3.
Condiciones ambientales extremas:

34 CAPÍTULO 3. LA NORMA IEC 61400
• Temperaturas en el rango de -20ºC a +50ºC.
• Aerogenerador provisto de pararrayos.
• No se establecen requisitos mínimos para el hielo en clases estándar I, II y III.
• No se establecen requisitos mínimos en caso de terremotos.
Capítulo 4
El rotor: diseño aerodinámico
El aerogenerador extrae energía del aire mediante el rotor. La eficiencia con la que lo hace, así como lacantidad de energía extraída, dependen de distintos parámetros que se han de optimizar para asegurar unfuncionamiento adecuado. En el presente capítulo se explica, en primer lugar, el modelo teórico en quese basa el diseño y optimización del rotor. Posteriormente, se lleva el modelo a la práctica, diseñando elrotor que precisa el aerogenerador objeto del presente Proyecto de Fin de Carrera.
4.1. Modelo teórico
Para la caracterización aerodinámica del rotor se emplea una combinación de la Teoría del Elemento dePala (TEP) con la Teoría de Cantidad de Movimiento (TCM), añadiendo como término corrector unafunción de pérdida de circulación tanto en la raíz como en la punta de la pala. En un futuro cercano, sepretende mejorar la teorización mediante la Teoria Turbillonaria, que obtiene mayor información a partirde más información de entrada y tiempo de cálculo, asumible a día de hoy.
El problema a resolver es el del paso de una corriente libre de velocidad absoluta U∞ conocida, a travésde un rotor situado a una altura conocida. Las hipótesis de partida son:
Flujo ideal, no viscoso, estacionario e incompresible
Velocidad uniforme en secciones paralelas al plano del rotor.
Efectos de rotación de estela despreciables.
35
36 CAPÍTULO 4. EL ROTOR: DISEÑO AERODINÁMICO
4.2. Aplicación práctica
El modelo teórico presentado en los apartados anteriores se lleva a la práctica realizando simulacionespor ordenador con Matlab, entorno bajo el que se ejecuta un conjunto de funciones y scripts denominadoWTToolBox.
4.2.1. Selección del número de palas
En el diseño de un aerogenerador, se busca extraer la mayor cantidad de potencia posible. Esto se consiguecon 3 o 4 palas. Dado que en los apartados siguientes se hallará que el parámetro de operación rondará elvalor 9, se fija un generador tripala como base de diseño.
4.2.2. Selección de la distribución de perfiles óptima
Debido al empleo de la Teoría de Elemento de Pala, es necesario definir qué perfiles conforman la palaa lo largo de su envergadura. Su distribución no puede ser azarosa, y su elección responde a ciertoscriterios:
El espesor de los perfiles más cercanos a la raíz será el mayor, puesto que en esta zona la palasoportará las mayores solicitaciones estructurales, al estar soportando el par del resto de la pala.
Los perfiles más cercanos a la punta tendrán el menor espesor, confiriendo así una mayor eficienciaaerodinámica y extrayendo la mayor potencia posible.
El coeficiente de sustentación máximo, CLmax , tendrá un valor moderado, para conseguir extraerpotencia sin crear momentos flectores en el buje excesivos.
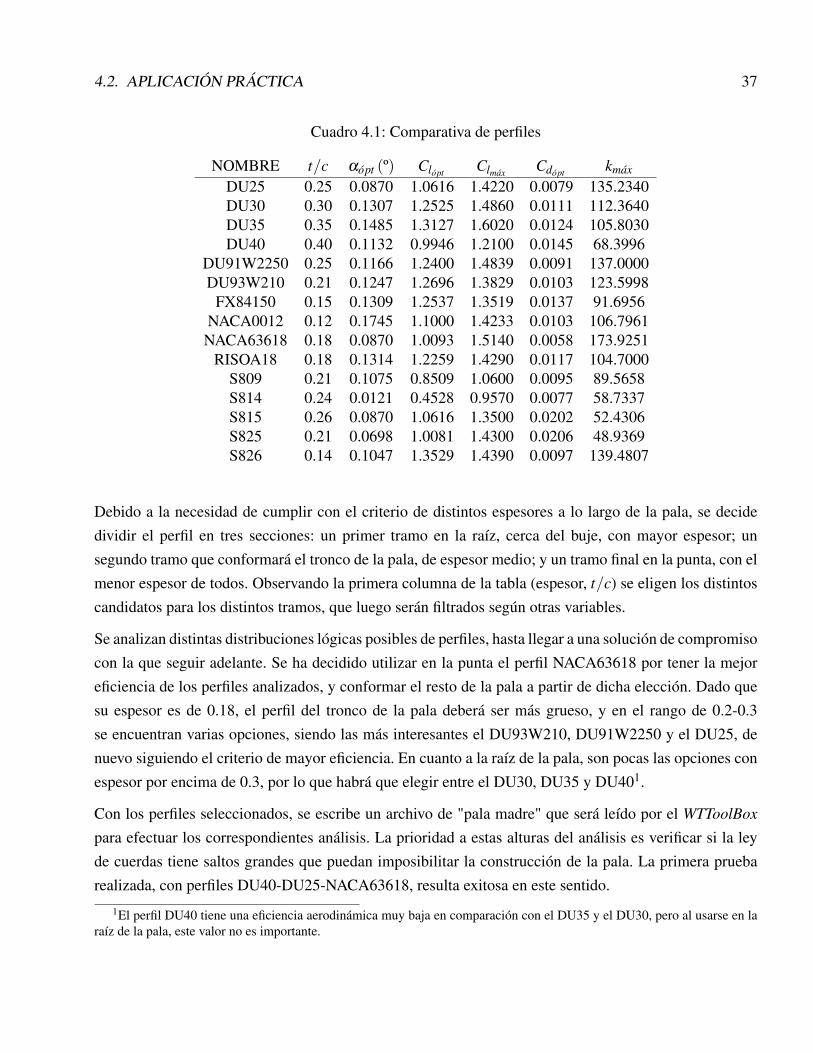
Se ha llevado a cabo un estudio de una gran variedad de perfiles, que se muestran en la tabla a continua-ción.
4.2. APLICACIÓN PRÁCTICA 37
Cuadro 4.1: Comparativa de perfiles
NOMBRE t/c αopt (º) Clopt Clmax Cdopt kmax
DU25 0.25 0.0870 1.0616 1.4220 0.0079 135.2340DU30 0.30 0.1307 1.2525 1.4860 0.0111 112.3640DU35 0.35 0.1485 1.3127 1.6020 0.0124 105.8030DU40 0.40 0.1132 0.9946 1.2100 0.0145 68.3996
DU91W2250 0.25 0.1166 1.2400 1.4839 0.0091 137.0000DU93W210 0.21 0.1247 1.2696 1.3829 0.0103 123.5998
FX84150 0.15 0.1309 1.2537 1.3519 0.0137 91.6956NACA0012 0.12 0.1745 1.1000 1.4233 0.0103 106.7961
NACA63618 0.18 0.0870 1.0093 1.5140 0.0058 173.9251RISOA18 0.18 0.1314 1.2259 1.4290 0.0117 104.7000
S809 0.21 0.1075 0.8509 1.0600 0.0095 89.5658S814 0.24 0.0121 0.4528 0.9570 0.0077 58.7337S815 0.26 0.0870 1.0616 1.3500 0.0202 52.4306S825 0.21 0.0698 1.0081 1.4300 0.0206 48.9369S826 0.14 0.1047 1.3529 1.4390 0.0097 139.4807
Debido a la necesidad de cumplir con el criterio de distintos espesores a lo largo de la pala, se decidedividir el perfil en tres secciones: un primer tramo en la raíz, cerca del buje, con mayor espesor; unsegundo tramo que conformará el tronco de la pala, de espesor medio; y un tramo final en la punta, con elmenor espesor de todos. Observando la primera columna de la tabla (espesor, t/c) se eligen los distintoscandidatos para los distintos tramos, que luego serán filtrados según otras variables.
Se analizan distintas distribuciones lógicas posibles de perfiles, hasta llegar a una solución de compromisocon la que seguir adelante. Se ha decidido utilizar en la punta el perfil NACA63618 por tener la mejoreficiencia de los perfiles analizados, y conformar el resto de la pala a partir de dicha elección. Dado quesu espesor es de 0.18, el perfil del tronco de la pala deberá ser más grueso, y en el rango de 0.2-0.3se encuentran varias opciones, siendo las más interesantes el DU93W210, DU91W2250 y el DU25, denuevo siguiendo el criterio de mayor eficiencia. En cuanto a la raíz de la pala, son pocas las opciones conespesor por encima de 0.3, por lo que habrá que elegir entre el DU30, DU35 y DU401.
Con los perfiles seleccionados, se escribe un archivo de "pala madre" que será leído por el WTToolBox
para efectuar los correspondientes análisis. La prioridad a estas alturas del análisis es verificar si la leyde cuerdas tiene saltos grandes que puedan imposibilitar la construcción de la pala. La primera pruebarealizada, con perfiles DU40-DU25-NACA63618, resulta exitosa en este sentido.
1El perfil DU40 tiene una eficiencia aerodinámica muy baja en comparación con el DU35 y el DU30, pero al usarse en laraíz de la pala, este valor no es importante.
38 CAPÍTULO 4. EL ROTOR: DISEÑO AERODINÁMICO
Cuadro 4.2: Resultados de la primera prueba con una pala madre de prueba
Perfiles CPmax λopt (m/s) ¿Salto en la ley de cuerdas?0.05<x<0.14 DU40
0.52254 9.16474 Mínimo0.14<x<0.68 DU250.68<x<1 NACA63618
0.05<x<0.27 DU400.52224 9.13291 No0.27<x<0.68 DU25
0.68<x<1 NACA636180.05<x<0.34 DU40
0.52168 9.07177 No0.34<x<0.68 DU250.68<x<1 NACA63618
En principio, sólo se ha comprobado cómo fluctúan las variables según en qué posición adimensional seencuentra la transición DU40 a DU25, pero es necesario también hacer pruebas con la transición entre elperfil DU25 y el NACA63618. En este caso resulta más fácil encontrar una posición en la que la ley decuerdas adimensionales no tenga un salto abrupto, y se determina esta posición como x ≈ 0,62.
Por otro lado, en la tabla se observa que, cuanto menor sea el tramo de perfil DU40 incluido, mayor esel CPmax . Debido a esto, se plantea la posibilidad de realizar un análisis adicional para ver qué ocurre encaso de eliminarlo.
Cuadro 4.3: Resultados con una pala madre con dos tramos
Perfiles CPmax λopt (m/s) ¿Salto en la ley de cuerdas?0.14<x<0.62 DU25
0.52454 9.39883 No0.62<x<1 NACA63618
La eliminación del perfil DU40 en la raíz lleva a una pala ligeramente mejor. Llegados a este punto, esfácil llegar a la conclusión de que hay que descartar la hipótesis de dividir la pala en tres tramos conperfiles diferentes y conformarnos con dos. No obstante, esto no se realizará, pues se considera que lamejora obtenida no es sustancial, y es posible que arriesgue estructuralmente, al perder el mayor espesorque confiere el perfil DU40 a la raíz de la pala.
Como último análisis, se prueba a sustituir el perfil DU40 por el DU35 y el DU30, por la posibilidad deconseguir mejores empalmes entre secciones. Los análisis realizados con el WTToolBox hacen descartarestos cambios inmediatamente, al presentarse saltos muy bruscos en la ley de cuerdas adimensionales.
Ya con la elección de la distribución DU40-DU25-NACA63618 decidida y justificada, se procede a afinaral máximo posible las posiciones adimensionales de transición entre secciones2 hasta conseguir el mejor
2Se puede observar que estas posiciones finales no coinciden con las analizadas previamente. Esto es debido a que se haido probando con distintas formas de dividir la pala a lo largo del análisis, para dar una mejor visibilidad a las zonas de mayor
4.2. APLICACIÓN PRÁCTICA 39
CPmaxposible, para así congelar definitivamente la pala madre, cuyos datos básicos se presentan en la tablaa continuación y cuyo archivo leíble por la WTToolBox se presenta en los Anexos del presente proyecto.
Cuadro 4.4: Resultados finales (pala madre elegida)
Perfiles CPmax λopt (m/s) ¿Salto en la ley de cuerdas?0.05<x<0.27 DU40
0.5236 9.2899 No0.31<x<0.72 DU250.76<x<1 NACA63618
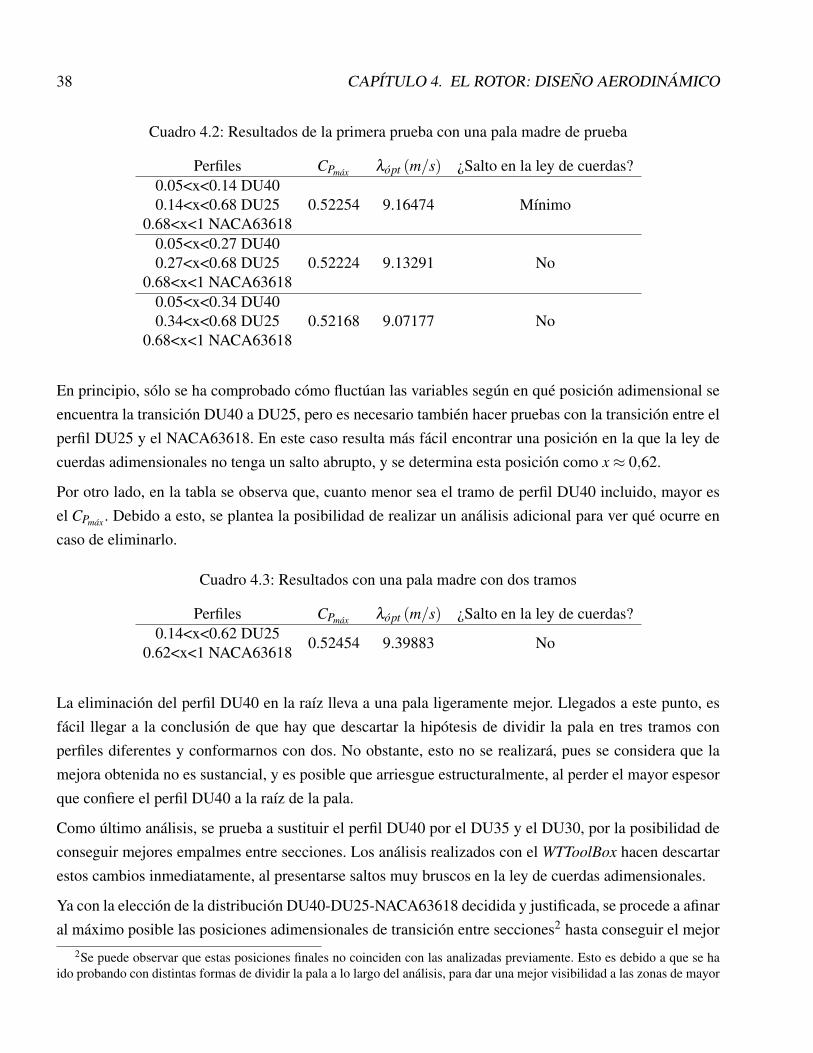
Para terminar, se muestra en la figura 4.1 la distribución de cuerda adimensional a lo largo de la longitudde pala adimensionalizada. Ésta es una forma de representar la planta de la pala, con las dimensionesestiradas para apreciar mejor los distintos cambios de curvatura. Se observa que se ha conseguido obteneruna pala con unos saltos de cuerda insignificantes.
Figura 4.1: Distribución de cuerda adimensional
0 0.2 0.4 0.6 0.8 10
0.02
0.04
0.06
0.08
0.1
0.12
x
c ad
curvatura, lo cual da lugar a nuevas posiciones de análisis no consideradas previamente.
40 CAPÍTULO 4. EL ROTOR: DISEÑO AERODINÁMICO
4.2.3. Resultados de la optimización del rotor
Llegado este punto, con la pala madre congelada y el número de palas decidido, es necesario ahoracalcular la geometría que maximizará el coeficiente de potencia para un parámetro de operación dado,esto es, la solidez óptima y ángulo de torsión óptimo para cada perfil de la distribución.
Los parámetros óptimos de la pala optimizada, sacado con el test correspondiente, son:
Cuadro 4.5: Parámetros óptimos de la pala madre
λopt CPmax CQmax λmaxCQ θmaxCQ θCopt9.2899 0.5236 0.0630 7.4886 -0.0243 -4.0279e-04
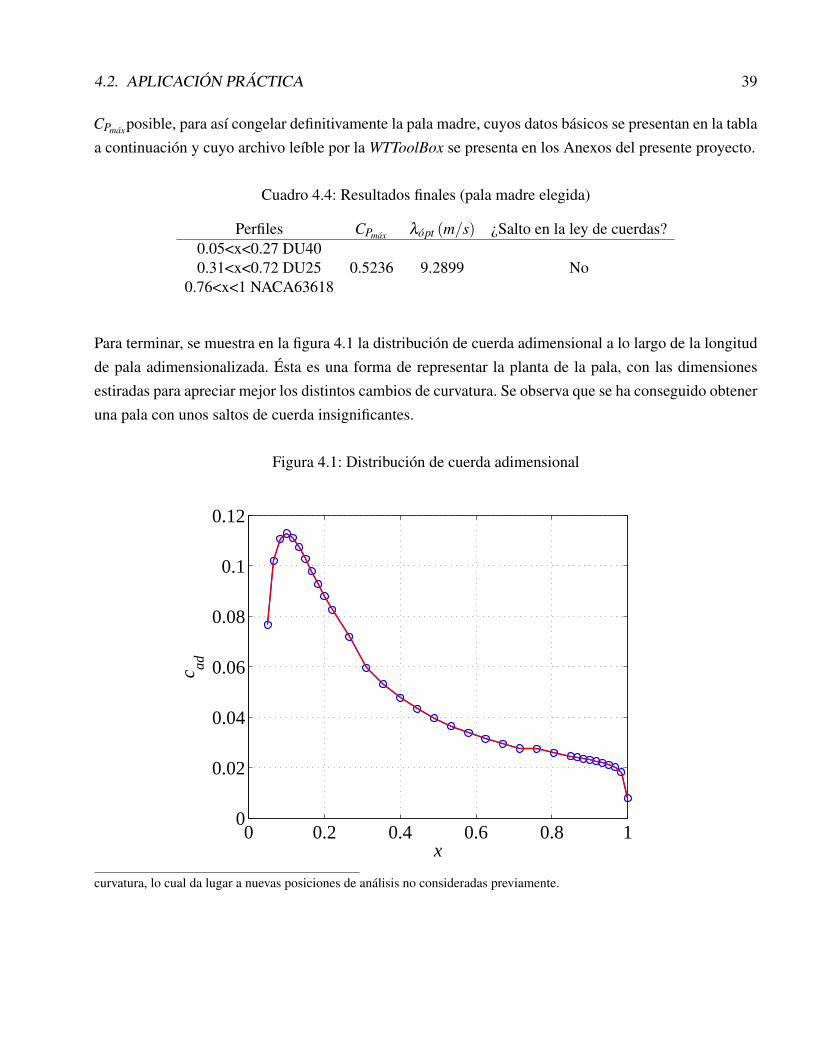
En la figura 4.2 se muestra la distribución de solidez obtenida a lo largo de la longitud de la pala adi-mensionalizada, obtenida tras la optimización. Se puede observar una alta similitud con la distribuciónde cuerda adimensional (figura 4.1), con los mismos saltos de solidez inapreciables.
Figura 4.2: Distribución de solidez de la pala madre
0 0.2 0.4 0.6 0.8 10
0.02
0.04
0.06
0.08
0.1
0.12
x
σ
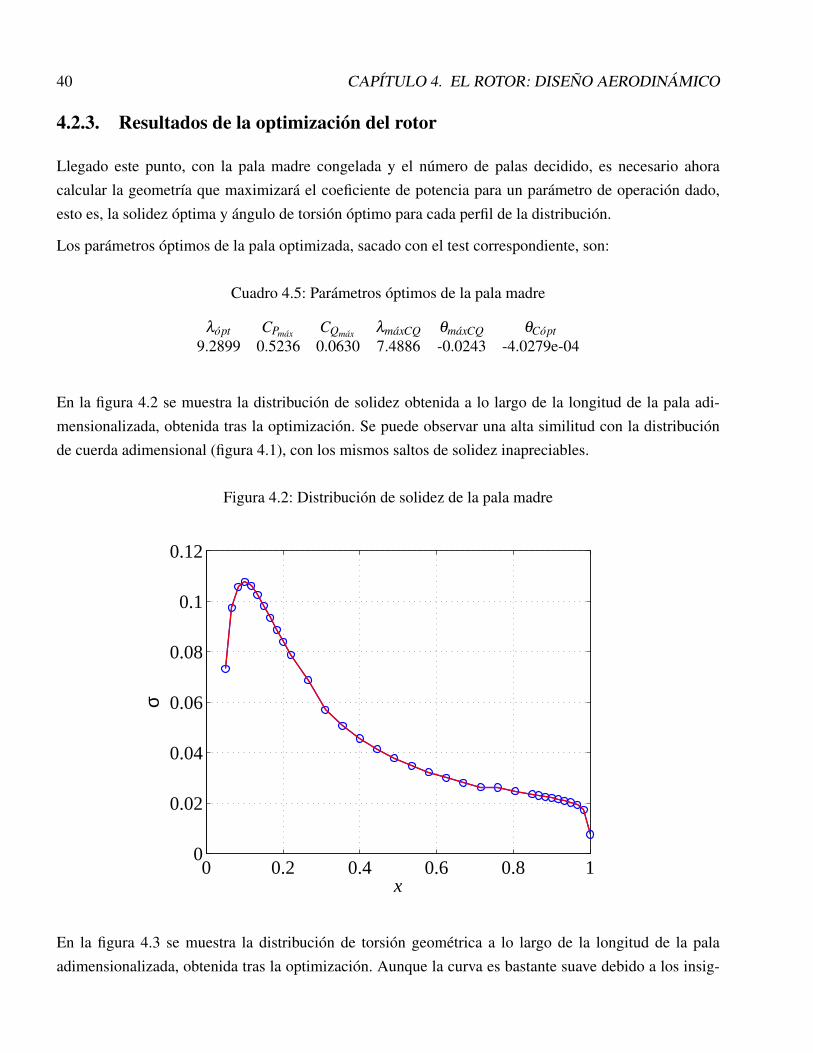
En la figura 4.3 se muestra la distribución de torsión geométrica a lo largo de la longitud de la palaadimensionalizada, obtenida tras la optimización. Aunque la curva es bastante suave debido a los insig-
4.2. APLICACIÓN PRÁCTICA 41
nificantes saltos de cuerda, en este caso se puede observar con mayor claridad un salto en la transición deperfil DU40 a DU25.
En la figura 4.4 se muestra la distribución de velocidad inducida axial a lo largo de la longitud de la palaadimensionalizada, obtenida tras la optimización. Se aprecia que tiende a 0.33, lo cual es de esperar deacuerdo al modelo teórico.
En la figura 4.5 se muestra la distribución de velocidad inducida tangencial a lo largo de la longitud dela pala adimensionalizada, obtenida tras la optimización. La curva tiene una forma distinta a la axial,tendiendo en este caso a cero según nos aproximamos a la punta de la pala.
En la figura 4.6 se muestra la distribución del ángulo de incidencia de la corriente a lo largo de la longitudde la pala adimensionalizada, obtenida tras la optimización. Se aprecia que decrece a lo largo de lacoordenada adimensional de la pala. Esto es debido a que este parámetro guarda una relación directa conla velocidad incidente tangencial (figura 4.5).
Figura 4.3: Distribución de torsión geométrica de la pala madre, en radianes
0 0.2 0.4 0.6 0.8 1−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
x
θ G
42 CAPÍTULO 4. EL ROTOR: DISEÑO AERODINÁMICO
Figura 4.4: Distribución del factor de velocidad inducida axial de la pala madre
0 0.2 0.4 0.6 0.8 10.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
x
a
Figura 4.5: Distribución del factor de velocidad inducida tangencial de la pala madre
0 0.2 0.4 0.6 0.8 10
0.05
0.1
0.15
0.2
0.25
0.3
0.35
x
a p
4.2. APLICACIÓN PRÁCTICA 43
Figura 4.6: Distribución del ángulo de incidencia de la corriente, en radianes
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
x
Φ

44 CAPÍTULO 4. EL ROTOR: DISEÑO AERODINÁMICO
Capítulo 5
Dimensionado: determinación del radio delrotor
En este capítulo se determinarán el radio del rotor y las velocidades nominales de viento y giro, graciasa los valores de θCopt , CPmax y λopt obtenidos en el capítulo anterior. Para ello, es preciso conocer lossiguientes parámetros:
Potencia nominal, que en el presente caso es de 20 MW .
Velocidad en punta de pala limitada por ruido, definida en 80 m/s.
Rango aceptable de la potencia específica, que se calculará en el presente capítulo.
Parámetros de Weibull de los emplazamientos candidatos, predeterminados como k = 1,5 y c =
8m/s.
Velocidad de arranque y parada, escogiendo como mínimo 3 m/s y como máximo 25 m/s, basandoesta elección en estudios de otros aerogeneradores.
En general, el aerogenerador sigue una ley de velocidad de giro proporcional a la velocidad de vientoincidente V∞ e inversamente proporcional al radio R, y dependiente del parámetro de operación λ , quevamos a considerar constante y óptimo. Esta ley, que se formula con simplicidad en la ecuación 5.1, secumple hasta una velocidad de viento incidente VN para la cual la potencia extraída es la nominal.
Ω =λoptU∞
R(5.1)
A partir de este punto, es preciso mantener la velocidad del giro del rotor constante, con objeto de limitarlas cargas aerodinámicas y preservar la integridad estructural del aerogenerador. Es entonces condición
45

46 CAPÍTULO 5. DIMENSIONADO: DETERMINACIÓN DEL RADIO DEL ROTOR
que la potencia extraída se mantenga constante e igual a la nominal, P = PN . Esta condición implica quela potencia aerodinámica y el par aerodinámico sean constantes, lo cual sólo se puede lograr amoldandoel paso de la pala θC en función de la velocidad del viento hasta llegar a la velocidad de parada. Esimportante reseñar que, en algunos casos, la velocidad de giro teórica puede resultar demasiado altacomo para que la soporte la estructura, lo que supondría otra limitación adicional por ruido.
A modo de recordatorio y resumen, se presentan en la tabla 5.1diversos parámetros para el aerogeneradoren estudio.
Cuadro 5.1: Datos del aerogenerador en estudio para el dimensionado del rotor
Número de horas operativas anuales 8760 hDensidad del aire ρ= 1.225 kgm−3
Velocidad de viento de arranque Vin= 3 ms−1
Velocidad de viento de parada Vout= 25 ms−1
Limitación de velocidad en punta por ruido ΩRNL= 80 ms−1
Potencia nominal PN= 20 MWRendimiento mecánico ηM=0.95Rendimiento eléctrico ηE= 0.95
Parámetro de operación óptimo λopt= 9.2899 ms−1
Ángulo de paso óptimo θC opt= -0.000403 radCoeficiente de potencia máximo CPmax= 0.5236
Parámetro de Weibull c 8 ms−1
Parámetro de Weibull k 1.5
5.1. Potencia específica
La potencia específica es un buen parámetro para determinar la viabilidad de un rotor para una potencianominal dada. Se define como la relación entre potencia nominal y superficie barrida por el rotor:
SP =PN
πR2 (5.2)
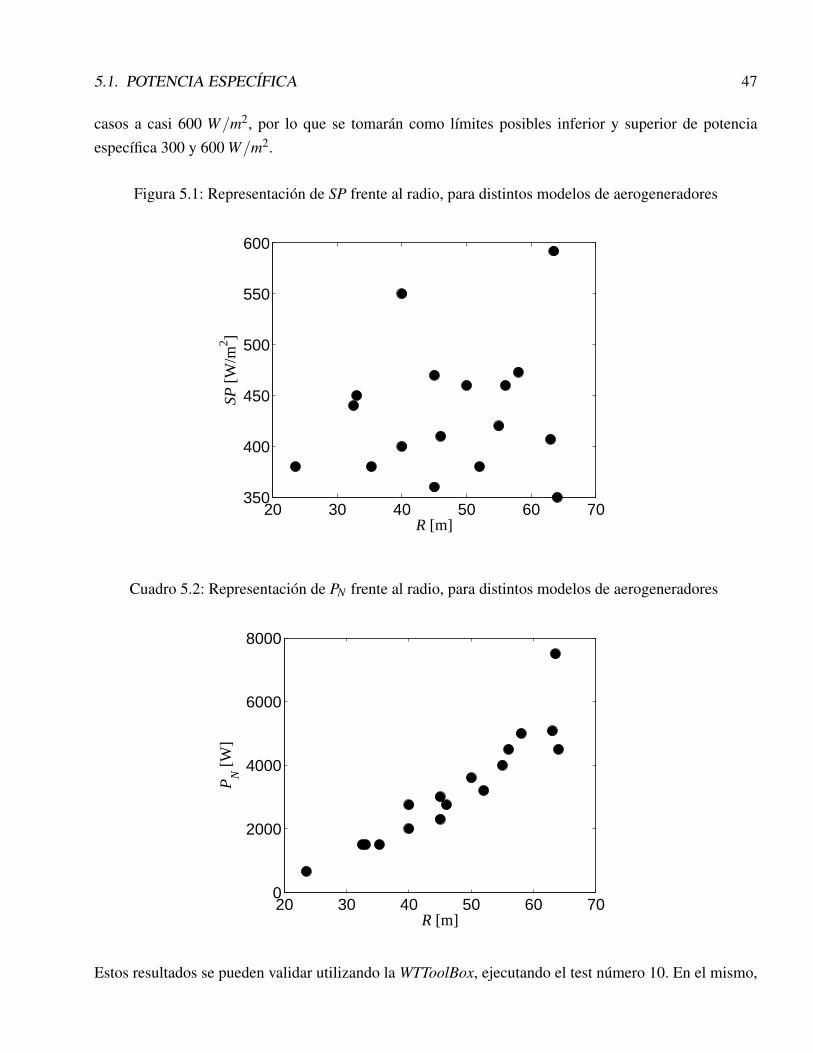
La gran potencia nominal requerida por el aerogenerador objeto de estudio de este proyecto implica unacarencia de semejantes reales con los que poder hacer una comparación precisa. Debido a esto, se procedea estudiar una gran cantidad de modelos, de diversos fabricantes y todo tipo de potencias nominales yradios. En las figuras 5.1 y 5.2 se observa que, al contrario que con las potencias nominales, no se obtieneninguna correlación al comparar el radio de estos aerogeneradores con sus potencias específicas, pero síque se observa que la mayoría tiene una potencia específica entre 300 y 450 W/m2, llegando en algunos
5.1. POTENCIA ESPECÍFICA 47
casos a casi 600 W/m2, por lo que se tomarán como límites posibles inferior y superior de potenciaespecífica 300 y 600 W/m2.
Figura 5.1: Representación de SP frente al radio, para distintos modelos de aerogeneradores
20 30 40 50 60 70350
400
450
500
550
600
R [m]
SP [
W/m
2 ]
Cuadro 5.2: Representación de PN frente al radio, para distintos modelos de aerogeneradores
20 30 40 50 60 700
2000
4000
6000
8000
R [m]
PN [
W]
Estos resultados se pueden validar utilizando la WTToolBox, ejecutando el test número 10. En el mismo,
48 CAPÍTULO 5. DIMENSIONADO: DETERMINACIÓN DEL RADIO DEL ROTOR
se extrae que los límites de potencia específica son 350 y 592 W/m2. Estos valores son consistentes conlos valores previamente calculados, y son los que emplearemos de ahora en adelante.
5.2. Elección del radio del rotor
Asumiendo el rango de potencias específicas previamente determinado, y teniendo en cuenta que lasexpresiones para radio mínimo y máximo son:
Rmın = (PN
πSPmax)
12 (5.3)
Rmax = (PN
πSPmın)
12 (5.4)
resulta que, para 20 MW y los límites de potencia específico elegidos, el radio mínimo es de 103 metrosy el máximo de 146 metros. Para estos valores del radio, las velocidades de viento nominales corres-pondientes son de 12.75 y 10.11 m/s, respectivamente, cuyo cálculo se realiza empleando la ecuación5.5.
R = (2PN
ρπηEηMCPmax)
12V
− 32
N0 (5.5)
La limitación por ruido plantea otra restricción en cuanto a la velocidad nominal máxima, añadiendo unalimitación al radio según:
VN,NL ≤ ΩRNL
λopt(5.6)
Lo que resulta en que la VN,NL ha de ser menor que 8.6 m/s y un radio mínimo de 185 metros.
Nuevamente, empleando el test número 10 de la WTToolBox, el radio para máxima potencia específicaes de 134.86 metros y el de mínima potencia específica, 104.70 metros. Aparte, se obtiene un valor parael radio limitado por ruido de 185.59 metros y un valor de VN,NL de 8.6115 m/s, valores consistentes conlos previamente calculados y que serán los empleados de ahora en adelante.
Se presentan en la tabla 5.3 los valores de radios y velocidades asociadas calculados, a modo de resumen.

5.2. ELECCIÓN DEL RADIO DEL ROTOR 49
Cuadro 5.3: Radios y velocidades de viento nominales para limitaciones por SP y ruidoLimitacion R VN ΩN ΩNR
SPmın 134.86 m 10.65 m/s 0.73 rad/s 98.45 m/sSPmax 104.70 m 12.61 m/s 1.12 rad/s 117.26 m/s
Limitacionruido > 185.69 m < 8.61 m/s 0.43 rad/s 80 m/s
Los valores calculados muestran la necesidad de tomar una decisión importante al respecto del radio.Respetando la limitación por ruido estaríamos eligiendo realizar una pala de un tamaño excesivo, queprobablemente sería cara y difícil de fabricar, además de posibles problemas estructurales. Otra opciónsería trabajar con un parámetro de operación inferior al óptimo, pero esto implicaría volver a diseñar lapala óptima. La solución de compromiso es limitar artificialmente la velocidad nominal por el ruido. Estoimplica tener tres tamos de operación:
1. Desde la velocidad de arranque hasta la velocidad límite por ruido, representado por las ecuaciones5.7.
2. Desde la velocidad límite por ruido hasta la velocidad nominal, representado por las ecuaciones5.8.
3. Desde la velocidad nominal hasta la velocidad de parada, representado por las ecuaciones 5.9.
I : Vin <U∞ <VΩN :
Ω =
λoptU∞
R
θC = θCopt = 0º
P = 12ρπR2U3
∞CPmaxηMηE
(5.7)
II : VΩN <U∞ <VN :
Ω = ΩN
θC = θCopt = 0º
P = 12ρπR2U3
∞CP(ΩNRU∞
,θCopt)ηMηE
(5.8)
III : VN <U∞ <Vout :
Ω = ΩN
θC = θC(U∞)
P = PNAηMηE
(5.9)
Para un mejor aprovechamiento energético, se escoge un aerogenerador con potencia específica mínima,adecuando sus velocidades de operación. El que escribe el presente proyecto decide, por tanto, congelarel diseño con un radio de pala de 135 metros. Se tendrá, por tanto:
50 CAPÍTULO 5. DIMENSIONADO: DETERMINACIÓN DEL RADIO DEL ROTOR
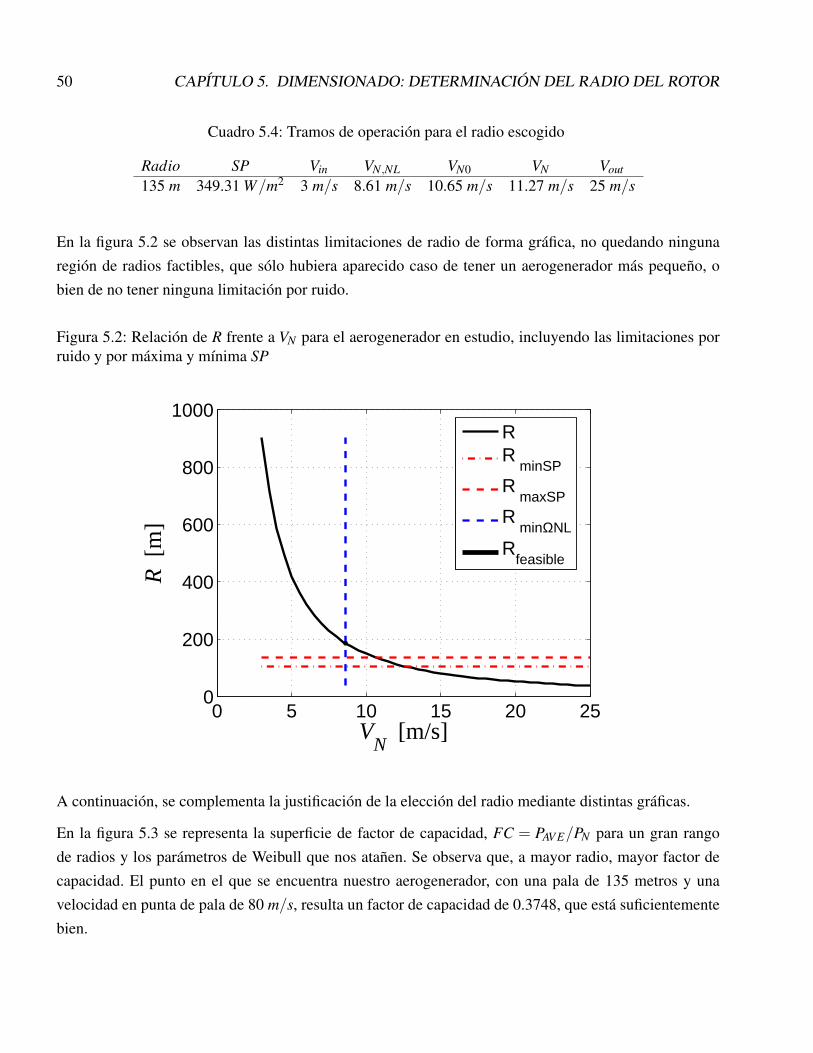
Cuadro 5.4: Tramos de operación para el radio escogido
Radio SP Vin VN,NL VN0 VN Vout135 m 349.31 W/m2 3 m/s 8.61 m/s 10.65 m/s 11.27 m/s 25 m/s
En la figura 5.2 se observan las distintas limitaciones de radio de forma gráfica, no quedando ningunaregión de radios factibles, que sólo hubiera aparecido caso de tener un aerogenerador más pequeño, obien de no tener ninguna limitación por ruido.
Figura 5.2: Relación de R frente a VN para el aerogenerador en estudio, incluyendo las limitaciones porruido y por máxima y mínima SP
0 5 10 15 20 250
200
400
600
800
1000
VN
[m/s]
R [
m]
RR
minSP
R maxSP
R minΩNL
Rfeasible
A continuación, se complementa la justificación de la elección del radio mediante distintas gráficas.
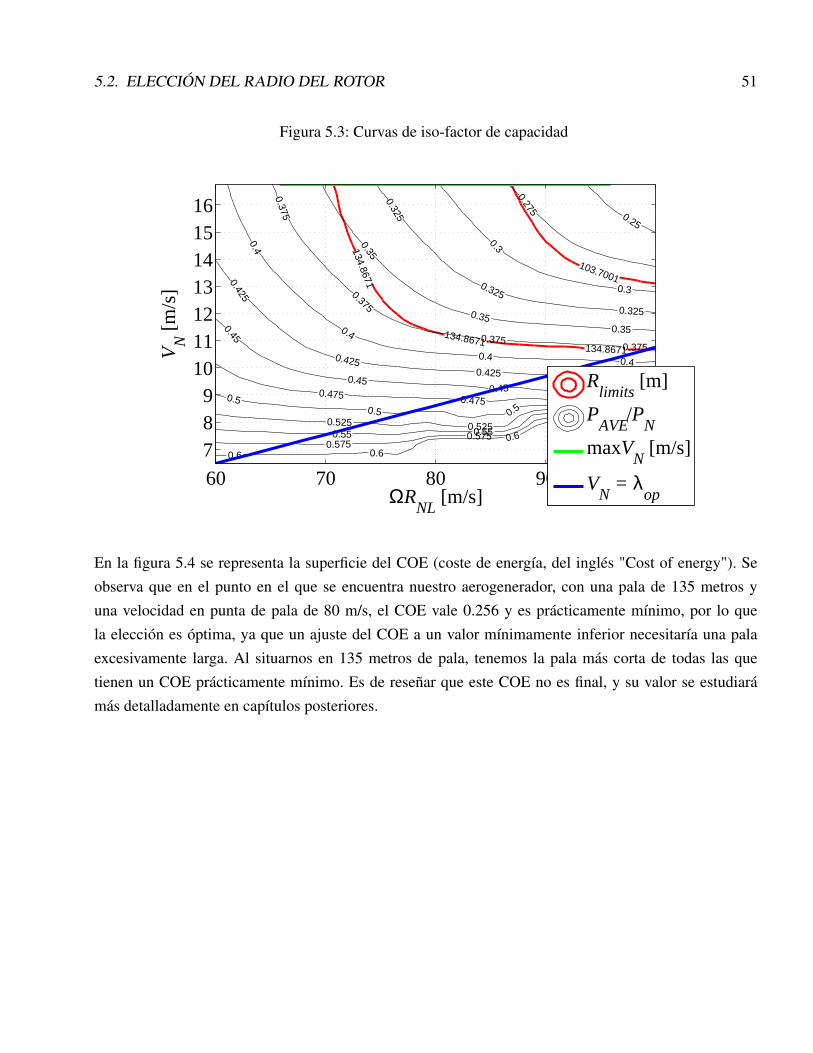
En la figura 5.3 se representa la superficie de factor de capacidad, FC = PAV E/PN para un gran rangode radios y los parámetros de Weibull que nos atañen. Se observa que, a mayor radio, mayor factor decapacidad. El punto en el que se encuentra nuestro aerogenerador, con una pala de 135 metros y unavelocidad en punta de pala de 80 m/s, resulta un factor de capacidad de 0.3748, que está suficientementebien.
5.2. ELECCIÓN DEL RADIO DEL ROTOR 51
Figura 5.3: Curvas de iso-factor de capacidad
103.7001
134.8671
134.8671134.8671
0.25
0.275
0.3
0.3
0.325
0.325
0.325
0.35
0.350.35
0.375
0.375
0.3750.375
0.4
0.4
0.4 0.4
0.425
0.4250.425 0.425
0.45
0.450.45 0.45
0.475 0.475 0.4750.50.5 0.5
0.525 0.525
0.525
0.55 0.55
0.55
0.5750.575
0.575
0.6 0.6
0.6
ΩRNL
[m/s]
VN
[m
/s]
60 70 80 90 100
789
10111213141516
Rlimits
[m]
PAVE
/PN
maxVN
[m/s]
VN
= λop
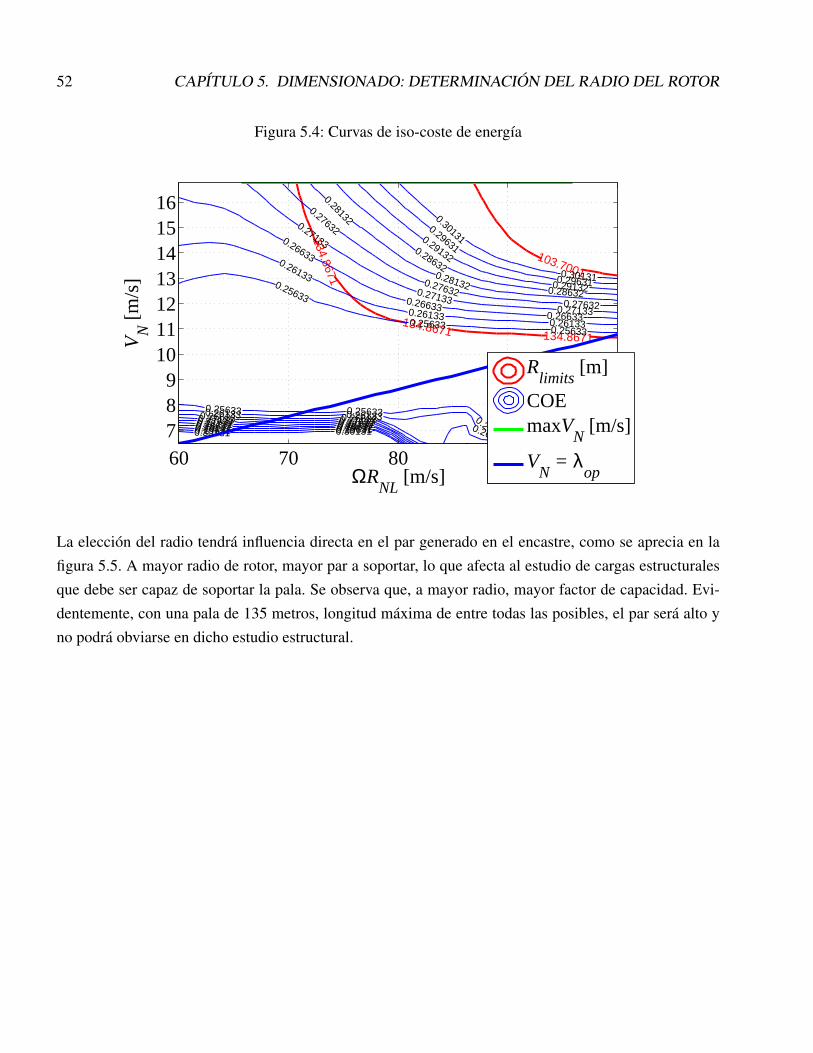
En la figura 5.4 se representa la superficie del COE (coste de energía, del inglés "Cost of energy"). Seobserva que en el punto en el que se encuentra nuestro aerogenerador, con una pala de 135 metros yuna velocidad en punta de pala de 80 m/s, el COE vale 0.256 y es prácticamente mínimo, por lo quela elección es óptima, ya que un ajuste del COE a un valor mínimamente inferior necesitaría una palaexcesivamente larga. Al situarnos en 135 metros de pala, tenemos la pala más corta de todas las quetienen un COE prácticamente mínimo. Es de reseñar que este COE no es final, y su valor se estudiarámás detalladamente en capítulos posteriores.
52 CAPÍTULO 5. DIMENSIONADO: DETERMINACIÓN DEL RADIO DEL ROTOR
Figura 5.4: Curvas de iso-coste de energía
103.7001
134.8671
134.8671 134.8671
0.25633
0.256330.25633
0.25633
0.25633 0.25633
0.26133
0.261330.26133
0.26133
0.261330.26133
0.266330.26633
0.26633
0.26633
0.266330.26633
0.27133
0.271330.27133
0.271330.27133
0.27133
0.27632
0.276320.27632
0.276320.27632
0.28132
0.28132
0.281320.28132
0.28632
0.28632
0.286320.28632
0.29132
0.29132
0.291320.29132
0.29631
0.29631
0.296310.29631
0.30131
0.30131
0.301310.30131
ΩRNL
[m/s]
VN
[m
/s]
60 70 80 90 100789
10111213141516
Rlimits
[m]
COEmaxV
N [m/s]
VN
= λop
La elección del radio tendrá influencia directa en el par generado en el encastre, como se aprecia en lafigura 5.5. A mayor radio de rotor, mayor par a soportar, lo que afecta al estudio de cargas estructuralesque debe ser capaz de soportar la pala. Se observa que, a mayor radio, mayor factor de capacidad. Evi-dentemente, con una pala de 135 metros, longitud máxima de entre todas las posibles, el par será alto yno podrá obviarse en dicho estudio estructural.
5.3. LEY DE CUERDAS 53
Figura 5.5: Curvas de iso-par
103.7001
134.8671
134.8671 134.8671
21.2109
24.9127
24.9127
28.6144
28.6144
32.3161
32.3161
32.3161
36.0178
36.0178
36.0178
39.7195
39.7195
39.719539.7195
43.4212
43.4212
43.421243.4212
47.1229
47.1229
47.122947.1229
50.8246
50.8246
50.824650.8246
54.5264
54.5264
54.5264
54.5264 54.5264
58.2281
58.228158.2281 58.2281
61.9298
61.929861.9298
65.631565.6315 65.6315
69.333269.3332 69.333273.0349
73.0349
76.7366
80.438384.1401
ΩRNL
[m/s]
VN [m
/s]
60 70 80 90 100
789
10111213141516
Rlimits
[m]
10−6QN [Nm]
maxVN [m/s]
VN
= λop
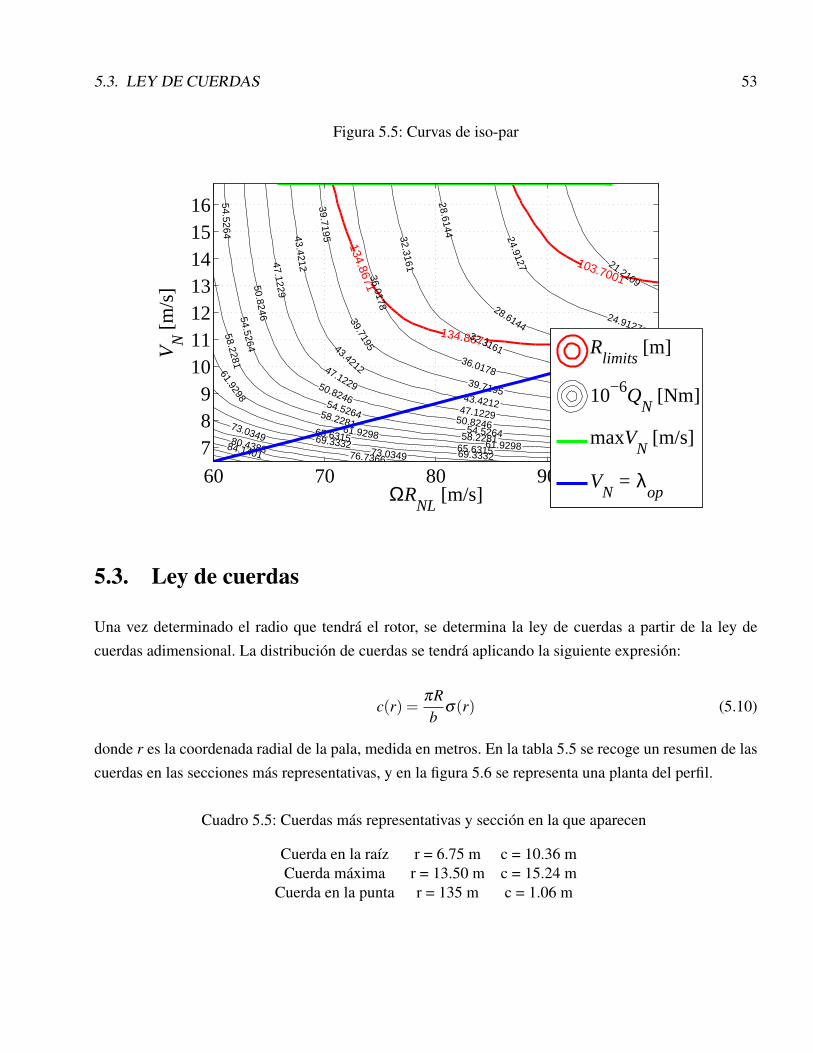
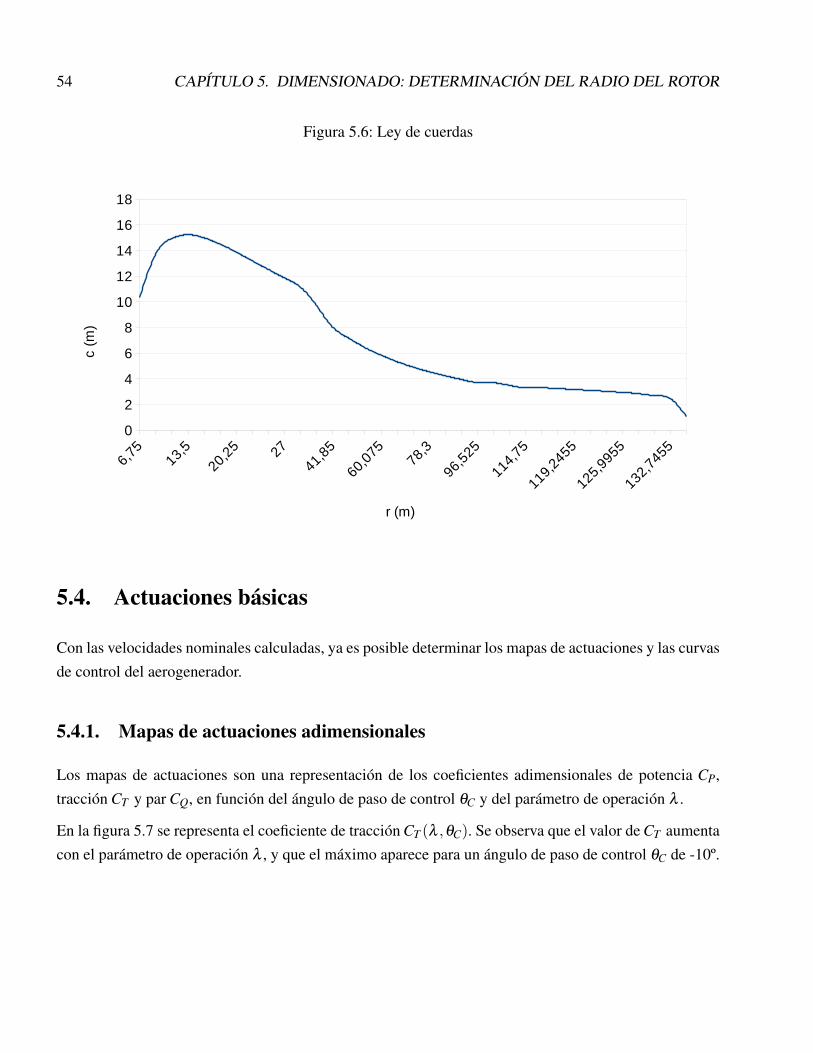
5.3. Ley de cuerdas
Una vez determinado el radio que tendrá el rotor, se determina la ley de cuerdas a partir de la ley decuerdas adimensional. La distribución de cuerdas se tendrá aplicando la siguiente expresión:
c(r) =πRb
σ(r) (5.10)
donde r es la coordenada radial de la pala, medida en metros. En la tabla 5.5 se recoge un resumen de lascuerdas en las secciones más representativas, y en la figura 5.6 se representa una planta del perfil.
Cuadro 5.5: Cuerdas más representativas y sección en la que aparecen
Cuerda en la raíz r = 6.75 m c = 10.36 mCuerda máxima r = 13.50 m c = 15.24 m
Cuerda en la punta r = 135 m c = 1.06 m
54 CAPÍTULO 5. DIMENSIONADO: DETERMINACIÓN DEL RADIO DEL ROTOR
Figura 5.6: Ley de cuerdas
5.4. Actuaciones básicas
Con las velocidades nominales calculadas, ya es posible determinar los mapas de actuaciones y las curvasde control del aerogenerador.
5.4.1. Mapas de actuaciones adimensionales
Los mapas de actuaciones son una representación de los coeficientes adimensionales de potencia CP,tracción CT y par CQ, en función del ángulo de paso de control θC y del parámetro de operación λ .
En la figura 5.7 se representa el coeficiente de tracción CT (λ ,θC). Se observa que el valor de CT aumentacon el parámetro de operación λ , y que el máximo aparece para un ángulo de paso de control θC de -10º.
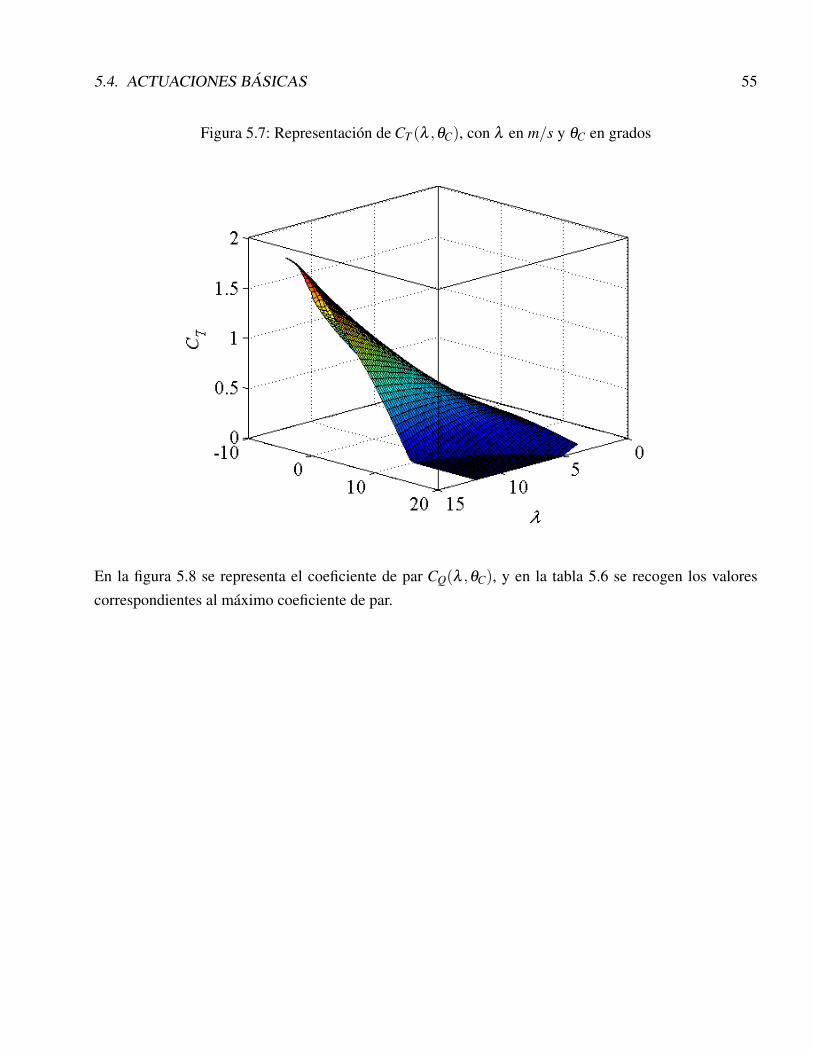
5.4. ACTUACIONES BÁSICAS 55
Figura 5.7: Representación de CT (λ ,θC), con λ en m/s y θC en grados
En la figura 5.8 se representa el coeficiente de par CQ(λ ,θC), y en la tabla 5.6 se recogen los valorescorrespondientes al máximo coeficiente de par.
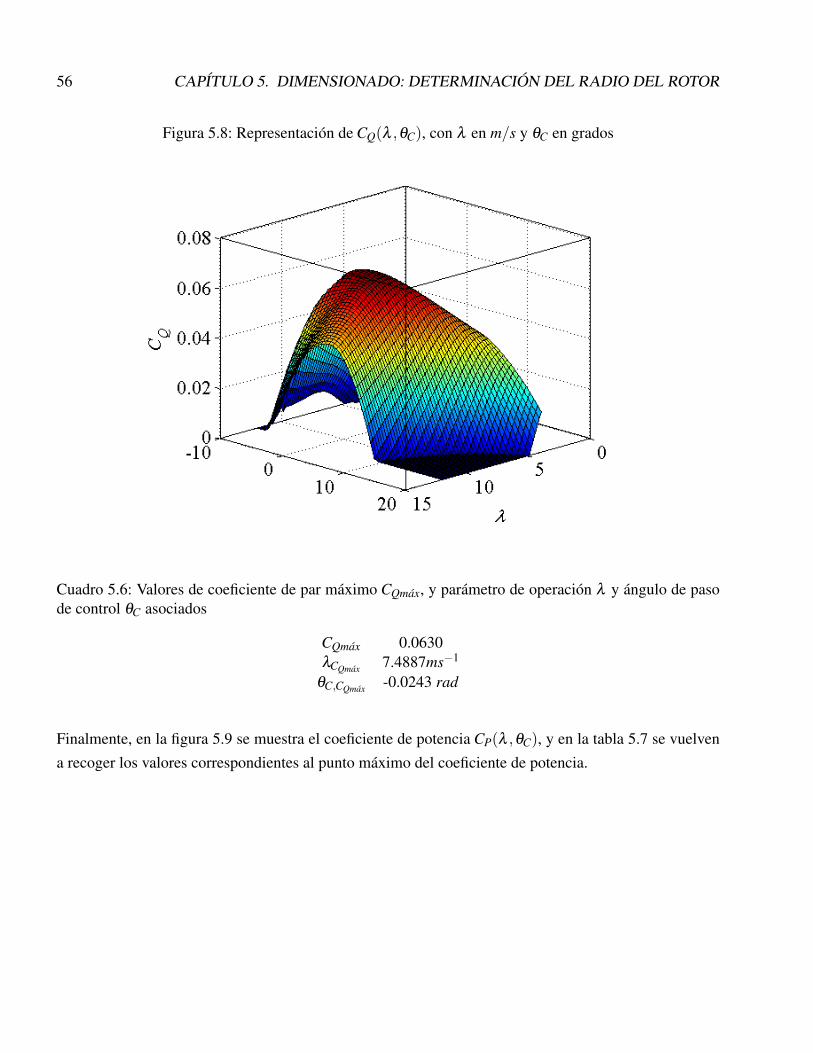
56 CAPÍTULO 5. DIMENSIONADO: DETERMINACIÓN DEL RADIO DEL ROTOR
Figura 5.8: Representación de CQ(λ ,θC), con λ en m/s y θC en grados
Cuadro 5.6: Valores de coeficiente de par máximo CQmax, y parámetro de operación λ y ángulo de pasode control θC asociados
CQmax 0.0630λCQmax 7.4887ms−1
θC,CQmax -0.0243 rad
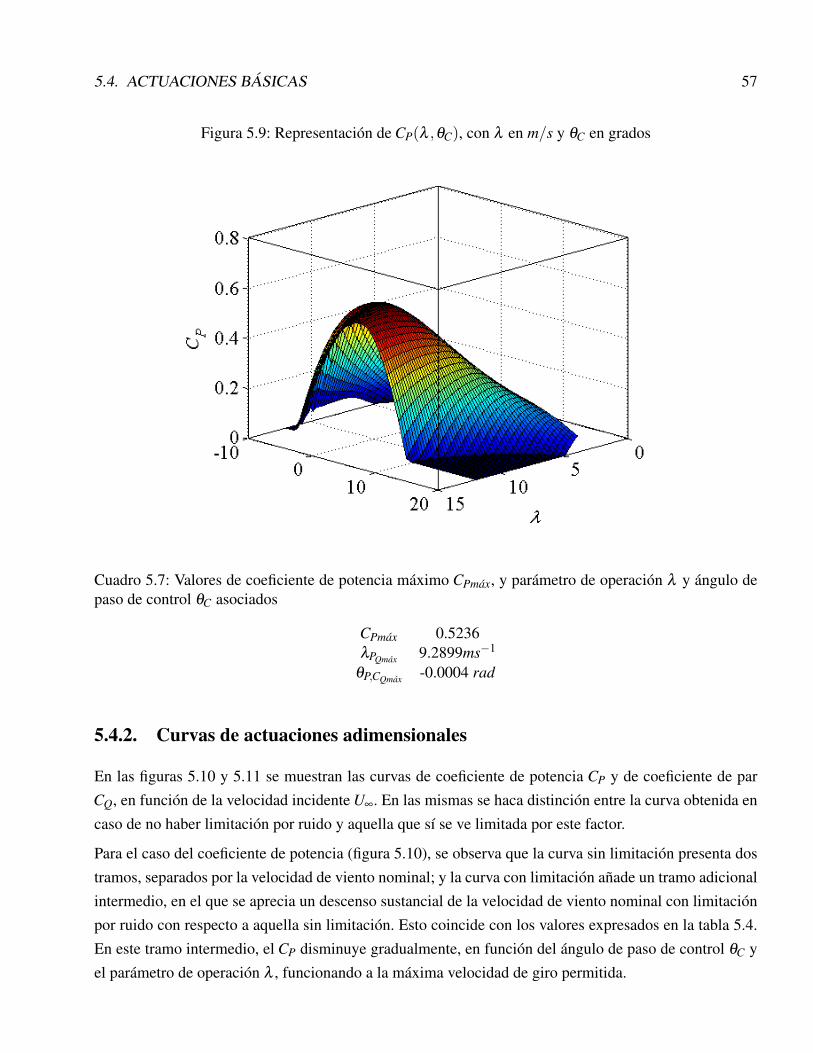
Finalmente, en la figura 5.9 se muestra el coeficiente de potencia CP(λ ,θC), y en la tabla 5.7 se vuelvena recoger los valores correspondientes al punto máximo del coeficiente de potencia.
5.4. ACTUACIONES BÁSICAS 57
Figura 5.9: Representación de CP(λ ,θC), con λ en m/s y θC en grados
Cuadro 5.7: Valores de coeficiente de potencia máximo CPmax, y parámetro de operación λ y ángulo depaso de control θC asociados
CPmax 0.5236λPQmax 9.2899ms−1
θP,CQmax -0.0004 rad
5.4.2. Curvas de actuaciones adimensionales
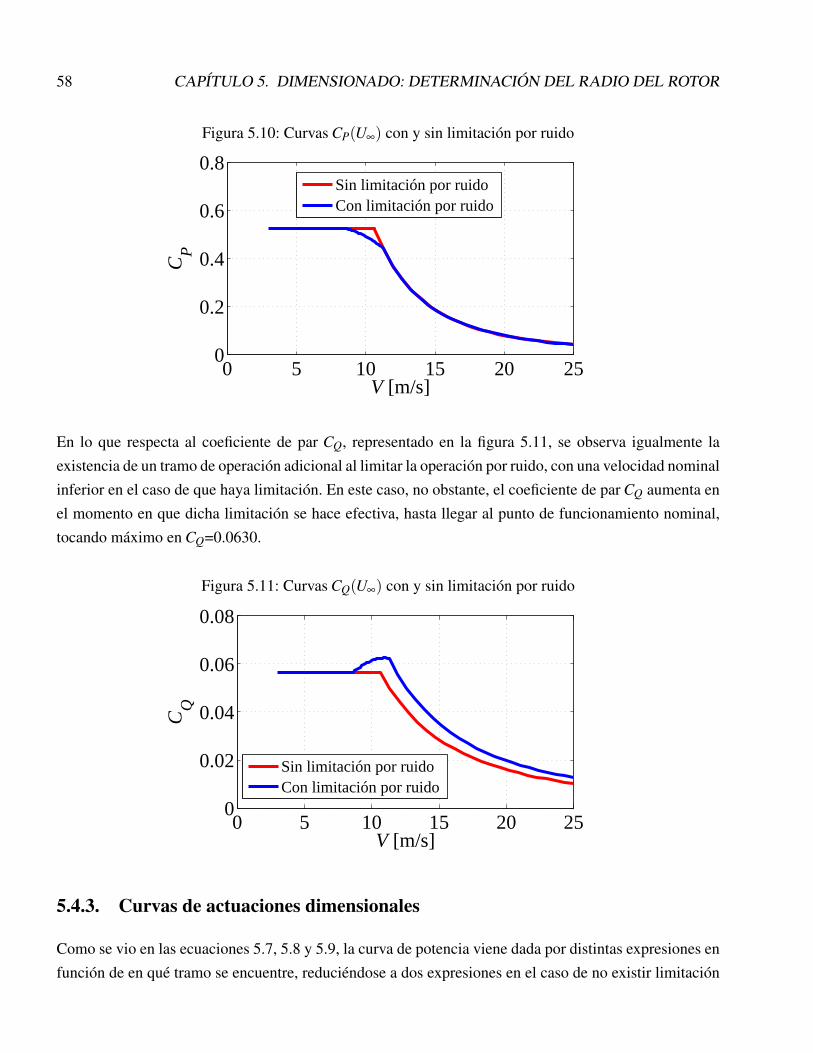
En las figuras 5.10 y 5.11 se muestran las curvas de coeficiente de potencia CP y de coeficiente de parCQ, en función de la velocidad incidente U∞. En las mismas se haca distinción entre la curva obtenida encaso de no haber limitación por ruido y aquella que sí se ve limitada por este factor.
Para el caso del coeficiente de potencia (figura 5.10), se observa que la curva sin limitación presenta dostramos, separados por la velocidad de viento nominal; y la curva con limitación añade un tramo adicionalintermedio, en el que se aprecia un descenso sustancial de la velocidad de viento nominal con limitaciónpor ruido con respecto a aquella sin limitación. Esto coincide con los valores expresados en la tabla 5.4.En este tramo intermedio, el CP disminuye gradualmente, en función del ángulo de paso de control θC yel parámetro de operación λ , funcionando a la máxima velocidad de giro permitida.
58 CAPÍTULO 5. DIMENSIONADO: DETERMINACIÓN DEL RADIO DEL ROTOR
Figura 5.10: Curvas CP(U∞) con y sin limitación por ruido
0 5 10 15 20 250
0.2
0.4
0.6
0.8
V [m/s]
CP
Sin limitación por ruidoCon limitación por ruido
En lo que respecta al coeficiente de par CQ, representado en la figura 5.11, se observa igualmente laexistencia de un tramo de operación adicional al limitar la operación por ruido, con una velocidad nominalinferior en el caso de que haya limitación. En este caso, no obstante, el coeficiente de par CQ aumenta enel momento en que dicha limitación se hace efectiva, hasta llegar al punto de funcionamiento nominal,tocando máximo en CQ=0.0630.
Figura 5.11: Curvas CQ(U∞) con y sin limitación por ruido
0 5 10 15 20 250
0.02
0.04
0.06
0.08
V [m/s]
CQ
Sin limitación por ruidoCon limitación por ruido
5.4.3. Curvas de actuaciones dimensionales
Como se vio en las ecuaciones 5.7, 5.8 y 5.9, la curva de potencia viene dada por distintas expresiones enfunción de en qué tramo se encuentre, reduciéndose a dos expresiones en el caso de no existir limitación
5.4. ACTUACIONES BÁSICAS 59
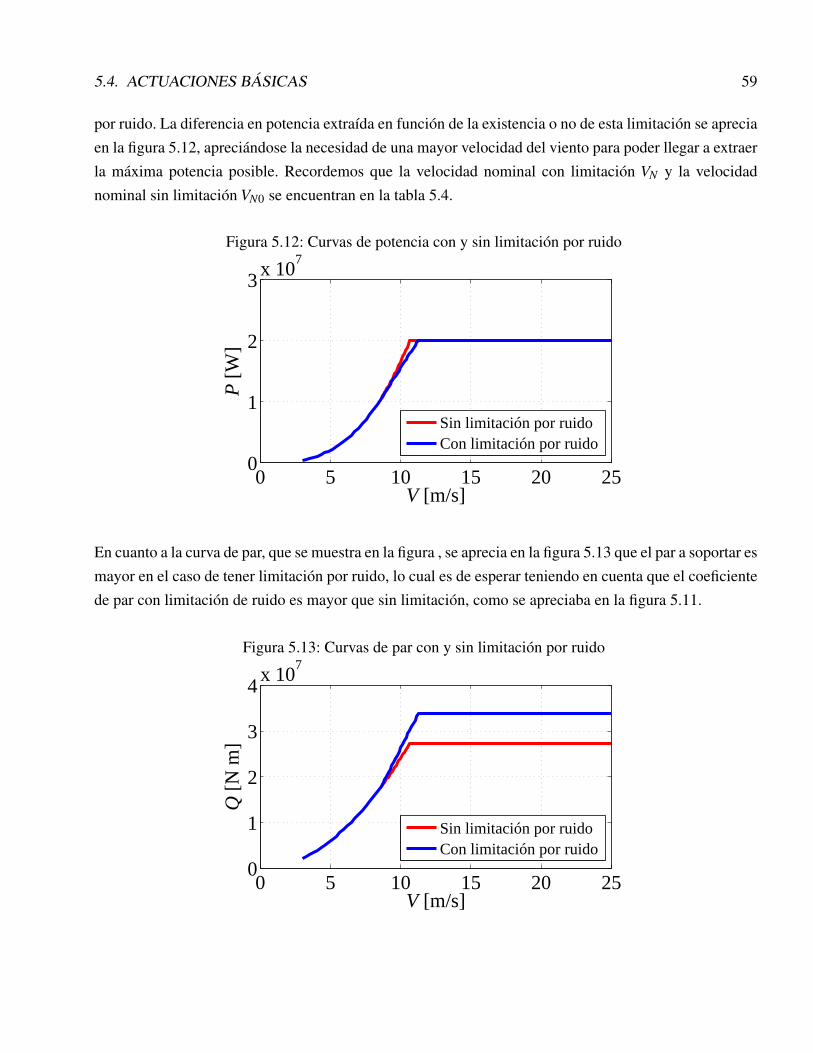
por ruido. La diferencia en potencia extraída en función de la existencia o no de esta limitación se apreciaen la figura 5.12, apreciándose la necesidad de una mayor velocidad del viento para poder llegar a extraerla máxima potencia posible. Recordemos que la velocidad nominal con limitación VN y la velocidadnominal sin limitación VN0 se encuentran en la tabla 5.4.
Figura 5.12: Curvas de potencia con y sin limitación por ruido
0 5 10 15 20 250
1
2
3x 10
7
V [m/s]
P [W
]
Sin limitación por ruidoCon limitación por ruido
En cuanto a la curva de par, que se muestra en la figura , se aprecia en la figura 5.13 que el par a soportar esmayor en el caso de tener limitación por ruido, lo cual es de esperar teniendo en cuenta que el coeficientede par con limitación de ruido es mayor que sin limitación, como se apreciaba en la figura 5.11.
Figura 5.13: Curvas de par con y sin limitación por ruido
0 5 10 15 20 250
1
2
3
4x 10
7
V [m/s]
Q [N
m]
Sin limitación por ruidoCon limitación por ruido
60 CAPÍTULO 5. DIMENSIONADO: DETERMINACIÓN DEL RADIO DEL ROTOR
5.4.4. Curvas de control estacionario
Existen cuatro sistemas de control de potencia:
Control por entrada en pérdida (CEP)
Control por cambio de paso (CCP)
Control por cambio de paso activo (CPA)
Control por entrada en pérdida activa (EPA)
El control de potencia por entrada en pérdida (CEP) es la forma más simple de control de las existentes.En él, las vueltas de giro del rotor permanecen constantes para todo el rango de velocidades de operaciónde la máquina. Está basado en al entrada en pérdida aerodinámica de las secciones de la pala (disminuciónde sustentación y aumento de resistencia aerodinámica). La orientación de la pala permanece en todomomento constante, ya que el ángulo de paso de control se elige para que a la velocidad nominal sealcance la potencia nominal de la máquina. Este sistema de control se descarta debido a su poca aplicaciónen máquinas reales, ya que produce elevadas cargas estructurales para velocidades de viento superioresa la nominal, y a que la incertidumbre en la determinación de la potencia es importante, debido a que elcomportamiento de la entrada en pérdida es difícil de predecir.
El control por cambio de paso (CCP) se basa en controlar la potencia mediante la variación de la orien-tación de la pala con respecto al viento, aumentando el ángulo de paso y reduciendo por tanto el ángulode ataque de las secciones. Este sistema de control tampoco se aplica en aerogeneradores de grandesdimensiones, por lo que se descarta igualmente.
Lo más común es realizar el control mediante la variación del ángulo de paso, manteniendo la velocidadangular constante para valores mayores a la velocidad nominal. Dependiendo de la filosofía de ley decontrol a implementar, nos decantaremos por el sistema CPA o el EPA. La velocidad de rotación se basaen intentar conseguir producir la potencia de forma más eficiente, funcionando en el entorno del puntode máxima eficiencia aerodinámica del rotor. Mediante un convertidor de frecuencia situado entre elgenerador y la red eléctrica es posible desacoplar la velocidad de rotación del rotor de la frecuencia dered eléctrica. De este modo es posible lograr que el rotor gire a vueltas diferentes de las necesarias paraacoplarse con la velocidad de giro del generador.
El primer resultado a analizar es el caso de control estacionario de velocidad angular (figura 5.14). Tantocon limitación por ruido como si no, la curva presenta sólo dos tramos. El primero de ellos se correspondecon la condición de funcionamiento correspondiente a parámetro de operación óptimo λopt . El segundotramo es una recta cuyo valor de velocidad angular se considera nominal, ΩN . La diferencia entre ambas
5.4. ACTUACIONES BÁSICAS 61
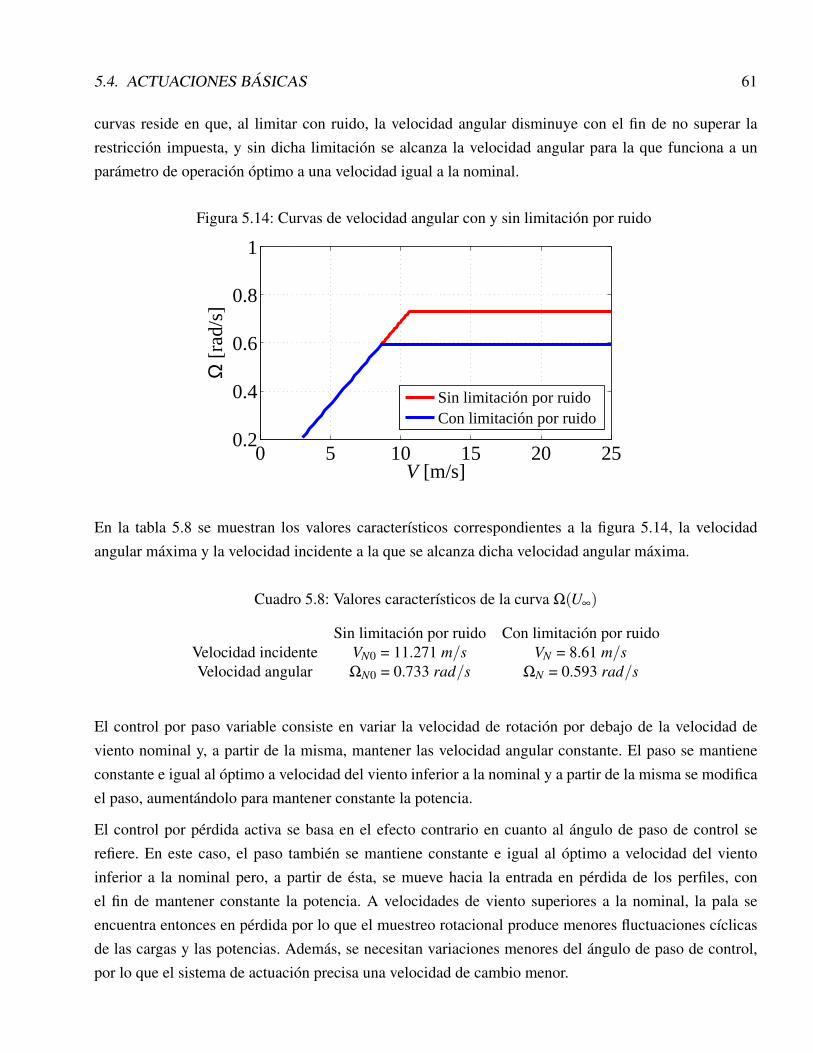
curvas reside en que, al limitar con ruido, la velocidad angular disminuye con el fin de no superar larestricción impuesta, y sin dicha limitación se alcanza la velocidad angular para la que funciona a unparámetro de operación óptimo a una velocidad igual a la nominal.
Figura 5.14: Curvas de velocidad angular con y sin limitación por ruido
0 5 10 15 20 250.2
0.4
0.6
0.8
1
V [m/s]
Ω [r
ad/s
]
Sin limitación por ruidoCon limitación por ruido
En la tabla 5.8 se muestran los valores característicos correspondientes a la figura 5.14, la velocidadangular máxima y la velocidad incidente a la que se alcanza dicha velocidad angular máxima.
Cuadro 5.8: Valores característicos de la curva Ω(U∞)
Sin limitación por ruido Con limitación por ruidoVelocidad incidente VN0 = 11.271 m/s VN = 8.61 m/sVelocidad angular ΩN0 = 0.733 rad/s ΩN = 0.593 rad/s
El control por paso variable consiste en variar la velocidad de rotación por debajo de la velocidad deviento nominal y, a partir de la misma, mantener las velocidad angular constante. El paso se mantieneconstante e igual al óptimo a velocidad del viento inferior a la nominal y a partir de la misma se modificael paso, aumentándolo para mantener constante la potencia.
El control por pérdida activa se basa en el efecto contrario en cuanto al ángulo de paso de control serefiere. En este caso, el paso también se mantiene constante e igual al óptimo a velocidad del vientoinferior a la nominal pero, a partir de ésta, se mueve hacia la entrada en pérdida de los perfiles, conel fin de mantener constante la potencia. A velocidades de viento superiores a la nominal, la pala seencuentra entonces en pérdida por lo que el muestreo rotacional produce menores fluctuaciones cíclicasde las cargas y las potencias. Además, se necesitan variaciones menores del ángulo de paso de control,por lo que el sistema de actuación precisa una velocidad de cambio menor.
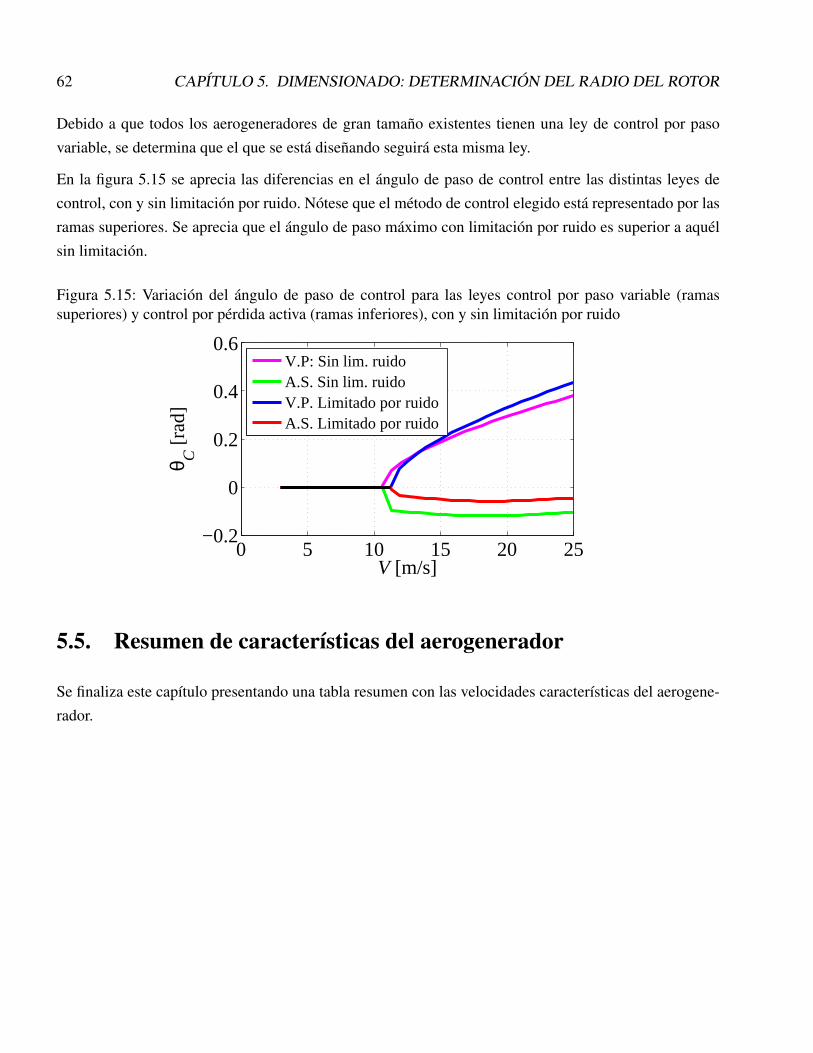
62 CAPÍTULO 5. DIMENSIONADO: DETERMINACIÓN DEL RADIO DEL ROTOR
Debido a que todos los aerogeneradores de gran tamaño existentes tienen una ley de control por pasovariable, se determina que el que se está diseñando seguirá esta misma ley.
En la figura 5.15 se aprecia las diferencias en el ángulo de paso de control entre las distintas leyes decontrol, con y sin limitación por ruido. Nótese que el método de control elegido está representado por lasramas superiores. Se aprecia que el ángulo de paso máximo con limitación por ruido es superior a aquélsin limitación.
Figura 5.15: Variación del ángulo de paso de control para las leyes control por paso variable (ramassuperiores) y control por pérdida activa (ramas inferiores), con y sin limitación por ruido
0 5 10 15 20 25−0.2
0
0.2
0.4
0.6
V [m/s]
θ C [r
ad]
V.P: Sin lim. ruidoA.S. Sin lim. ruidoV.P. Limitado por ruidoA.S. Limitado por ruido
5.5. Resumen de características del aerogenerador
Se finaliza este capítulo presentando una tabla resumen con las velocidades características del aerogene-rador.
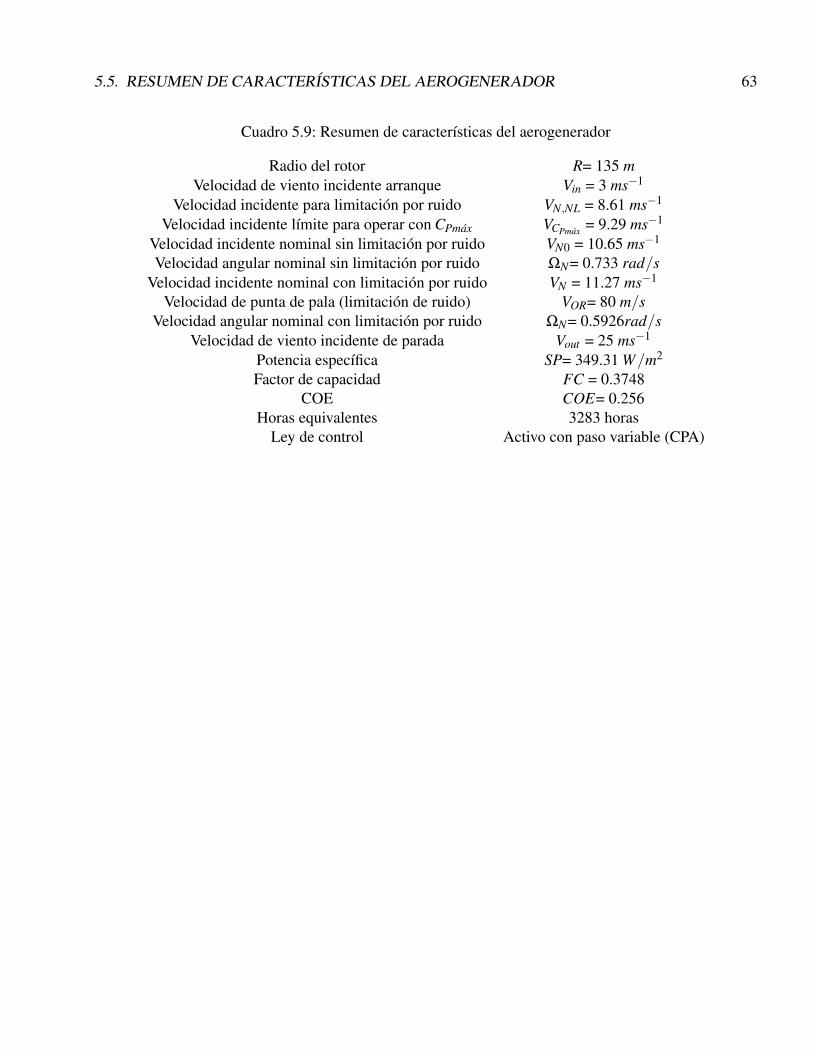
5.5. RESUMEN DE CARACTERÍSTICAS DEL AEROGENERADOR 63
Cuadro 5.9: Resumen de características del aerogenerador
Radio del rotor R= 135 mVelocidad de viento incidente arranque Vin = 3 ms−1
Velocidad incidente para limitación por ruido VN,NL = 8.61 ms−1
Velocidad incidente límite para operar con CPmax VCPmax = 9.29 ms−1
Velocidad incidente nominal sin limitación por ruido VN0 = 10.65 ms−1
Velocidad angular nominal sin limitación por ruido ΩN= 0.733 rad/sVelocidad incidente nominal con limitación por ruido VN = 11.27 ms−1
Velocidad de punta de pala (limitación de ruido) VOR= 80 m/sVelocidad angular nominal con limitación por ruido ΩN= 0.5926rad/s
Velocidad de viento incidente de parada Vout = 25 ms−1
Potencia específica SP= 349.31 W/m2
Factor de capacidad FC = 0.3748COE COE= 0.256
Horas equivalentes 3283 horasLey de control Activo con paso variable (CPA)

64 CAPÍTULO 5. DIMENSIONADO: DETERMINACIÓN DEL RADIO DEL ROTOR
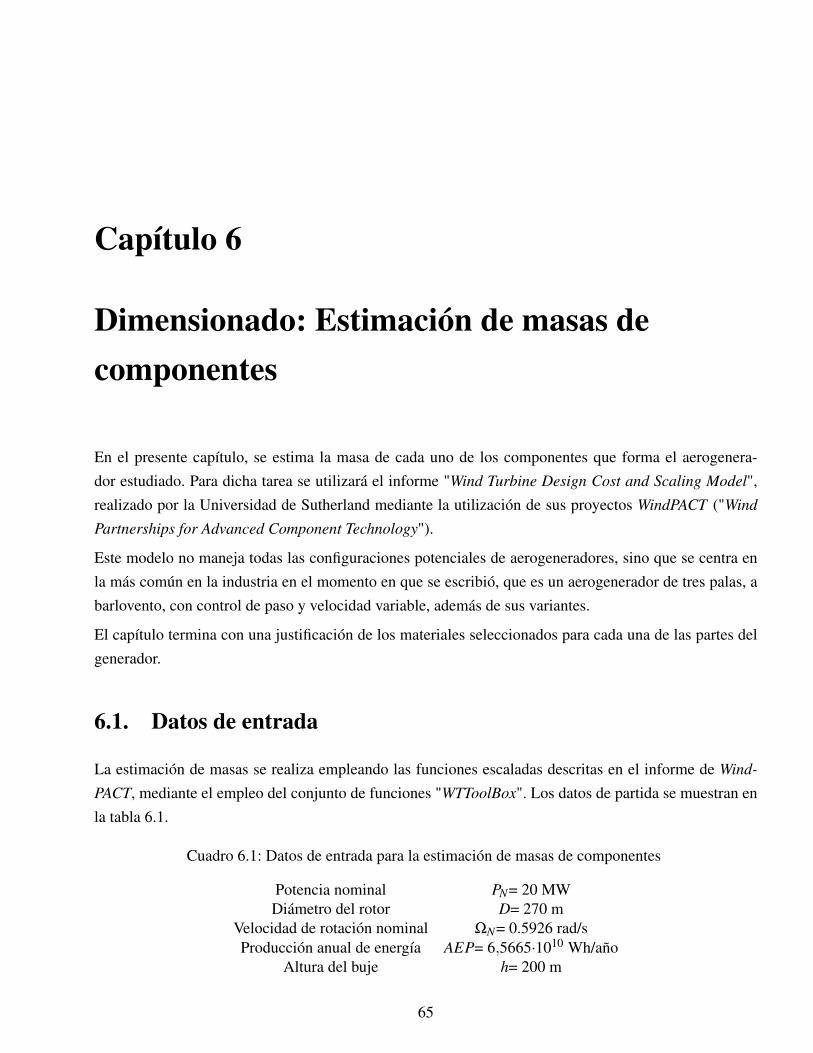
Capítulo 6
Dimensionado: Estimación de masas decomponentes
En el presente capítulo, se estima la masa de cada uno de los componentes que forma el aerogenera-dor estudiado. Para dicha tarea se utilizará el informe "Wind Turbine Design Cost and Scaling Model",realizado por la Universidad de Sutherland mediante la utilización de sus proyectos WindPACT ("Wind
Partnerships for Advanced Component Technology").
Este modelo no maneja todas las configuraciones potenciales de aerogeneradores, sino que se centra enla más común en la industria en el momento en que se escribió, que es un aerogenerador de tres palas, abarlovento, con control de paso y velocidad variable, además de sus variantes.
El capítulo termina con una justificación de los materiales seleccionados para cada una de las partes delgenerador.
6.1. Datos de entrada
La estimación de masas se realiza empleando las funciones escaladas descritas en el informe de Wind-
PACT, mediante el empleo del conjunto de funciones "WTToolBox". Los datos de partida se muestran enla tabla 6.1.
Cuadro 6.1: Datos de entrada para la estimación de masas de componentes
Potencia nominal PN= 20 MWDiámetro del rotor D= 270 m
Velocidad de rotación nominal ΩN= 0.5926 rad/sProducción anual de energía AEP= 6,5665·1010 Wh/año
Altura del buje h= 200 m
65
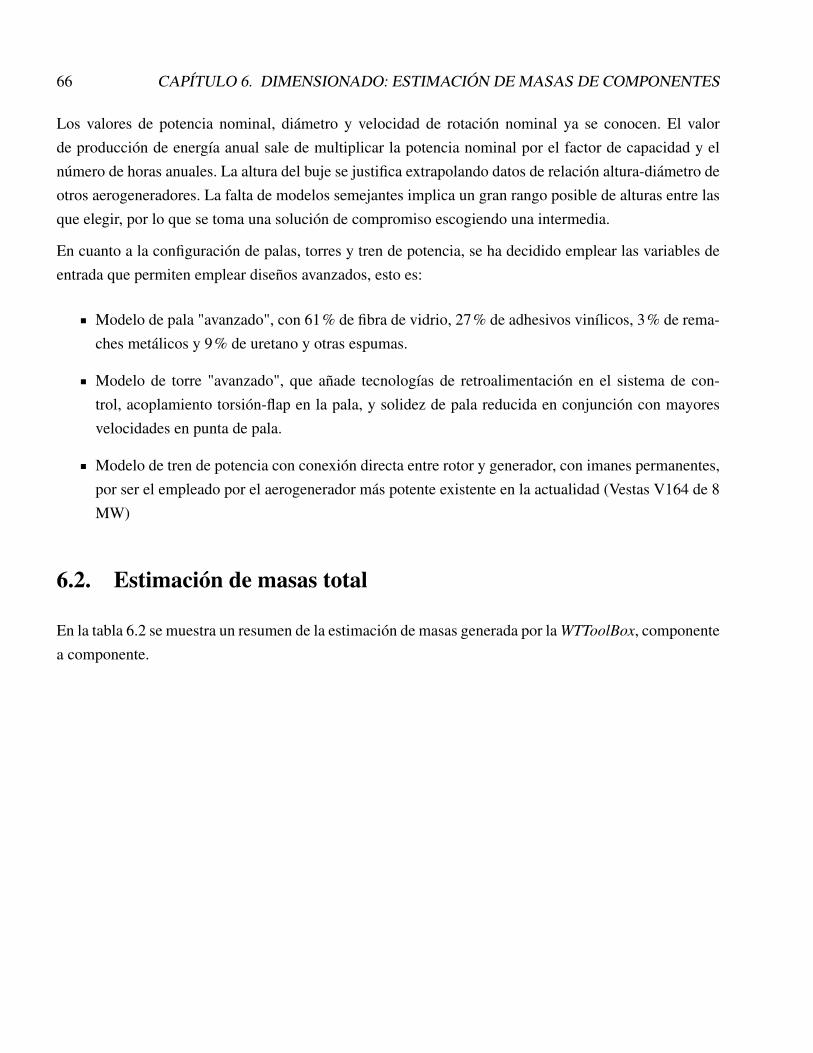
66 CAPÍTULO 6. DIMENSIONADO: ESTIMACIÓN DE MASAS DE COMPONENTES
Los valores de potencia nominal, diámetro y velocidad de rotación nominal ya se conocen. El valorde producción de energía anual sale de multiplicar la potencia nominal por el factor de capacidad y elnúmero de horas anuales. La altura del buje se justifica extrapolando datos de relación altura-diámetro deotros aerogeneradores. La falta de modelos semejantes implica un gran rango posible de alturas entre lasque elegir, por lo que se toma una solución de compromiso escogiendo una intermedia.
En cuanto a la configuración de palas, torres y tren de potencia, se ha decidido emplear las variables deentrada que permiten emplear diseños avanzados, esto es:
Modelo de pala "avanzado", con 61% de fibra de vidrio, 27% de adhesivos vinílicos, 3% de rema-ches metálicos y 9% de uretano y otras espumas.
Modelo de torre "avanzado", que añade tecnologías de retroalimentación en el sistema de con-trol, acoplamiento torsión-flap en la pala, y solidez de pala reducida en conjunción con mayoresvelocidades en punta de pala.
Modelo de tren de potencia con conexión directa entre rotor y generador, con imanes permanentes,por ser el empleado por el aerogenerador más potente existente en la actualidad (Vestas V164 de 8MW)
6.2. Estimación de masas total
En la tabla 6.2 se muestra un resumen de la estimación de masas generada por la WTToolBox, componentea componente.
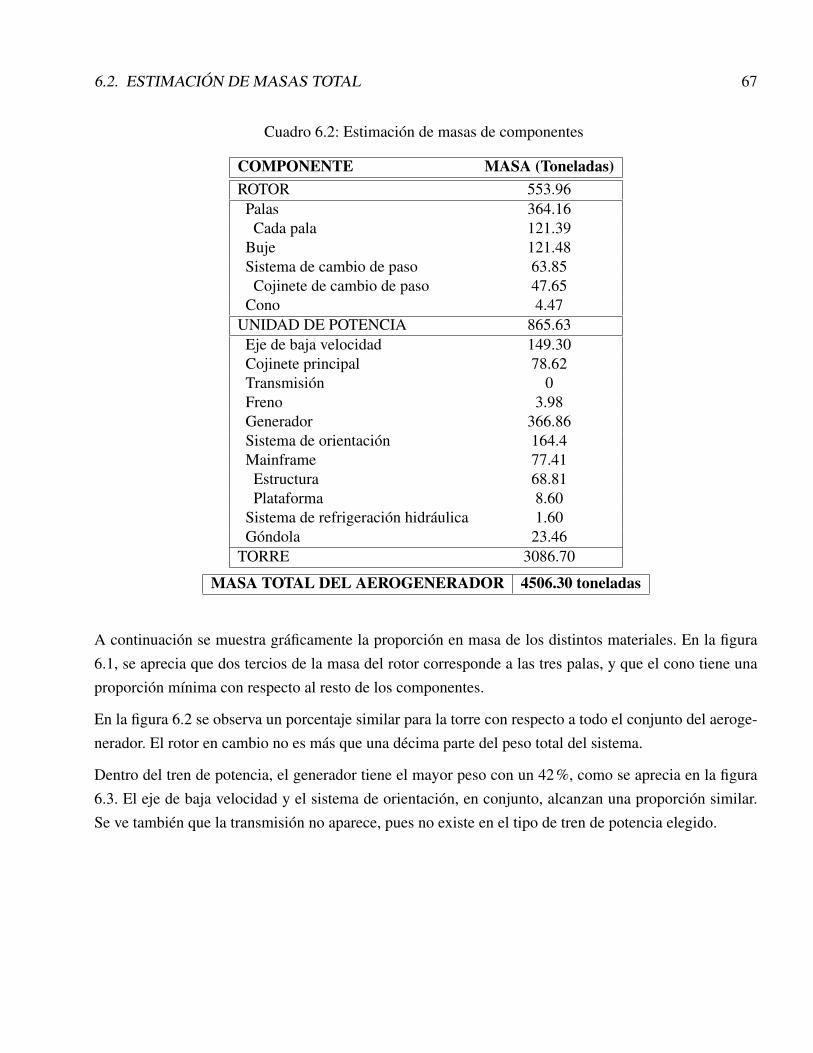
6.2. ESTIMACIÓN DE MASAS TOTAL 67
Cuadro 6.2: Estimación de masas de componentes
COMPONENTE MASA (Toneladas)ROTOR 553.96Palas 364.16Cada pala 121.39
Buje 121.48Sistema de cambio de paso 63.85Cojinete de cambio de paso 47.65
Cono 4.47UNIDAD DE POTENCIA 865.63Eje de baja velocidad 149.30Cojinete principal 78.62Transmisión 0Freno 3.98Generador 366.86Sistema de orientación 164.4Mainframe 77.41Estructura 68.81Plataforma 8.60
Sistema de refrigeración hidráulica 1.60Góndola 23.46
TORRE 3086.70
MASA TOTAL DEL AEROGENERADOR 4506.30 toneladas
A continuación se muestra gráficamente la proporción en masa de los distintos materiales. En la figura6.1, se aprecia que dos tercios de la masa del rotor corresponde a las tres palas, y que el cono tiene unaproporción mínima con respecto al resto de los componentes.
En la figura 6.2 se observa un porcentaje similar para la torre con respecto a todo el conjunto del aeroge-nerador. El rotor en cambio no es más que una décima parte del peso total del sistema.
Dentro del tren de potencia, el generador tiene el mayor peso con un 42%, como se aprecia en la figura6.3. El eje de baja velocidad y el sistema de orientación, en conjunto, alcanzan una proporción similar.Se ve también que la transmisión no aparece, pues no existe en el tipo de tren de potencia elegido.
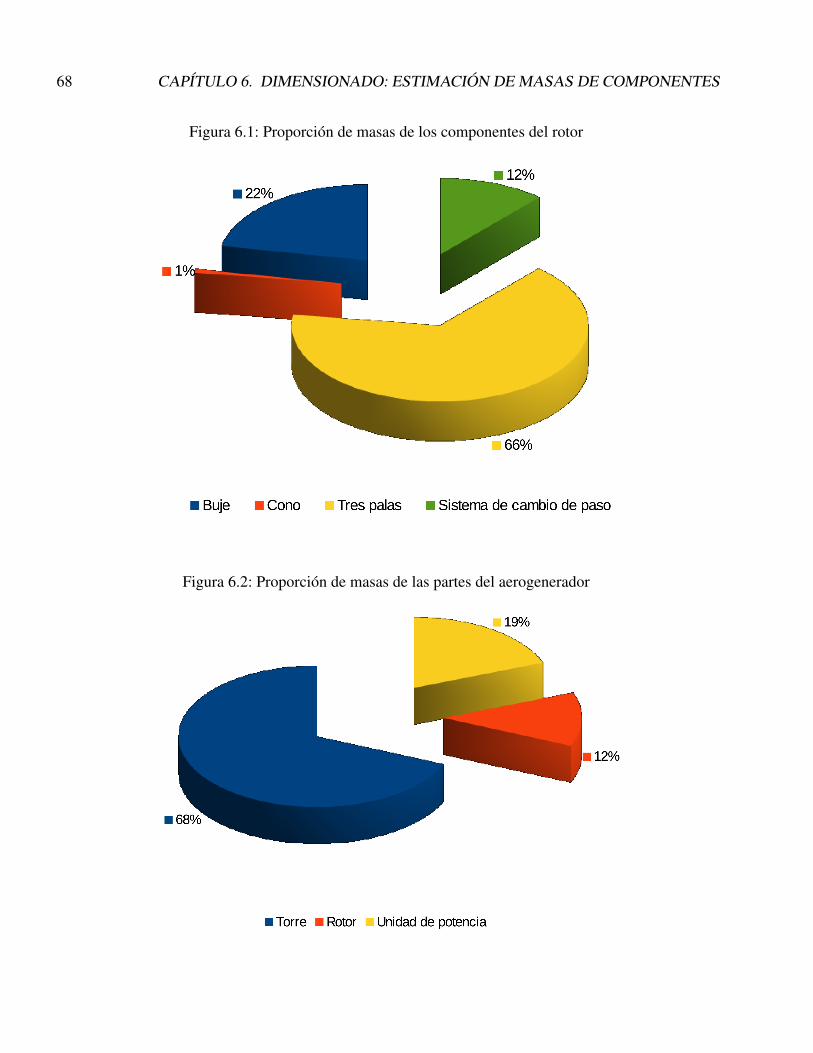
68 CAPÍTULO 6. DIMENSIONADO: ESTIMACIÓN DE MASAS DE COMPONENTES
Figura 6.1: Proporción de masas de los componentes del rotor
Figura 6.2: Proporción de masas de las partes del aerogenerador
6.3. SELECCIÓN DE MATERIALES 69
Figura 6.3: Proporción de masas de los componentes del tren de potencia
6.3. Selección de materiales
A continuación se describen las alternativas en selección de los materiales que componen cada uno delos elementos del aerogenerador. La elección de un material u otro se basa en el estado de cargas al queesté sometido el componente y a su funcionalidad.
El empleo de fibra de vidrio es la solución más extendida debido a su buena relación entre resistencia yprecio, pero su bajo módulo elástico fuerza a la inclusión de fibra de carbono como refuerzo en las zonasdonde la concentración de esfuerzos sea más elevada. Por ello, el aerogenerador en estudio contará conun revestimiento de fibra de vidrio/epoxi más un cajón de torsión y refuerzos de borde de salida de fibrade carbono/epoxi.
6.3.1. Palas
El material presente en las palas ha de tener un alto valor de resistencia y rigidez específicas, así comoun buen comportamiento a fatiga. Además, ha de ser lo más ligero posible para minimizar las cargasa las que esté sometida la pala. Es por esto que se considera fundamental la utilización de materialescompuestos en la fabricación de las mismas, ya que proporcionan muy buenas propiedades mecánicas yahorran peso, en comparación con los materiales metálicos.
70 CAPÍTULO 6. DIMENSIONADO: ESTIMACIÓN DE MASAS DE COMPONENTES
6.3.2. Buje
Este componente está sometido a grandes solicitaciones estructurales, por lo que ha de estar fabricadocon un material con elevadas propiedades mecánicas, como el acero de fundición.
Existen dos configuraciones de buje: tricilíndrico y esférico. En ambos casos la geometría es compleja,por lo que se fabrican por moldeo.
6.3.3. Góndola
La góndola soporta las cargas generadas por el rotor y por el peso de los componentes alojados dentrode la misma. Además, los protege del exterior. Por su ligereza y resistencia a corrosión, la cubierta sefabrica con materiales compuestos.
6.3.4. Torre
Aunque es posible fabricarla de celosía u hormigón, se utiliza preferentemente el acero. El hormigónes adecuado para torres de gran altura, con la ventaja de que pueden construirse in situ, reduciendo loscostes de transporte. Las torres de celosía se reservan para aerogeneradores de pequeño tamaño.
Los aerogeneradores de mayor tamaño existentes en el mercado presentan torres tubulares de acero, porlo que ésta es la configuración elegida para la torre del aerogenerador en estudio.
Capítulo 7
Cálculo estructural
En el presente capítulo se calculan las cargas que afectan al rotor y a la torre, para poder diseñar la palaóptima que resiste la operación nominal más un factor de seguridad sin romper. Así mismo, se efectúatambién un análisis de vibraciones.
Se utiliza el siguiente convenio de ejes, que se puede visualizar en la figura:
Ejes H1: ligados al buje (“H” de hub) y a una de las palas. Es un triedro que, por tanto, gira con elrotor.
Ejes H: ligados al buje (“H” de hub) pero no al rotor. Es un triedro que, por tanto, ve girar al rotordesde la torre.
Ejes S: ligados a cada sección de pala, siguiendo a la cuerda, y por tanto decalado un ángulo θ
respecto al triedro H1.
71
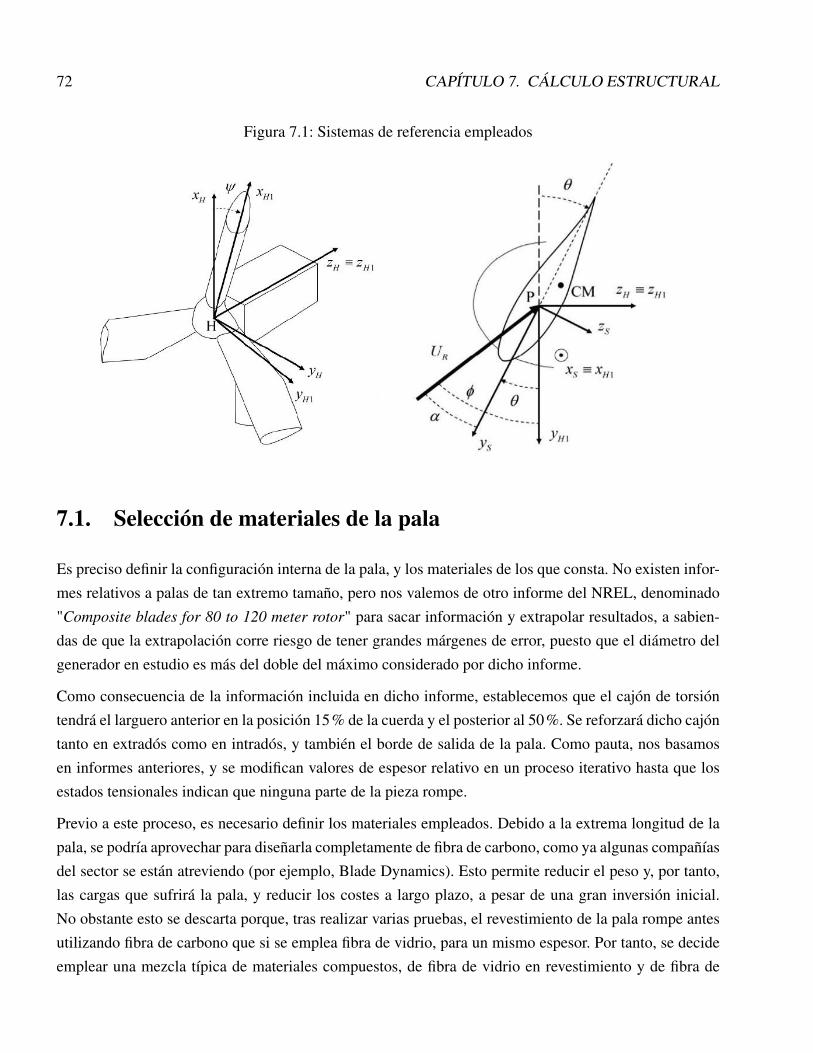
72 CAPÍTULO 7. CÁLCULO ESTRUCTURAL
Figura 7.1: Sistemas de referencia empleados
7.1. Selección de materiales de la pala
Es preciso definir la configuración interna de la pala, y los materiales de los que consta. No existen infor-mes relativos a palas de tan extremo tamaño, pero nos valemos de otro informe del NREL, denominado"Composite blades for 80 to 120 meter rotor" para sacar información y extrapolar resultados, a sabien-das de que la extrapolación corre riesgo de tener grandes márgenes de error, puesto que el diámetro delgenerador en estudio es más del doble del máximo considerado por dicho informe.
Como consecuencia de la información incluida en dicho informe, establecemos que el cajón de torsióntendrá el larguero anterior en la posición 15% de la cuerda y el posterior al 50%. Se reforzará dicho cajóntanto en extradós como en intradós, y también el borde de salida de la pala. Como pauta, nos basamosen informes anteriores, y se modifican valores de espesor relativo en un proceso iterativo hasta que losestados tensionales indican que ninguna parte de la pieza rompe.
Previo a este proceso, es necesario definir los materiales empleados. Debido a la extrema longitud de lapala, se podría aprovechar para diseñarla completamente de fibra de carbono, como ya algunas compañíasdel sector se están atreviendo (por ejemplo, Blade Dynamics). Esto permite reducir el peso y, por tanto,las cargas que sufrirá la pala, y reducir los costes a largo plazo, a pesar de una gran inversión inicial.No obstante esto se descarta porque, tras realizar varias pruebas, el revestimiento de la pala rompe antesutilizando fibra de carbono que si se emplea fibra de vidrio, para un mismo espesor. Por tanto, se decideemplear una mezcla típica de materiales compuestos, de fibra de vidrio en revestimiento y de fibra de
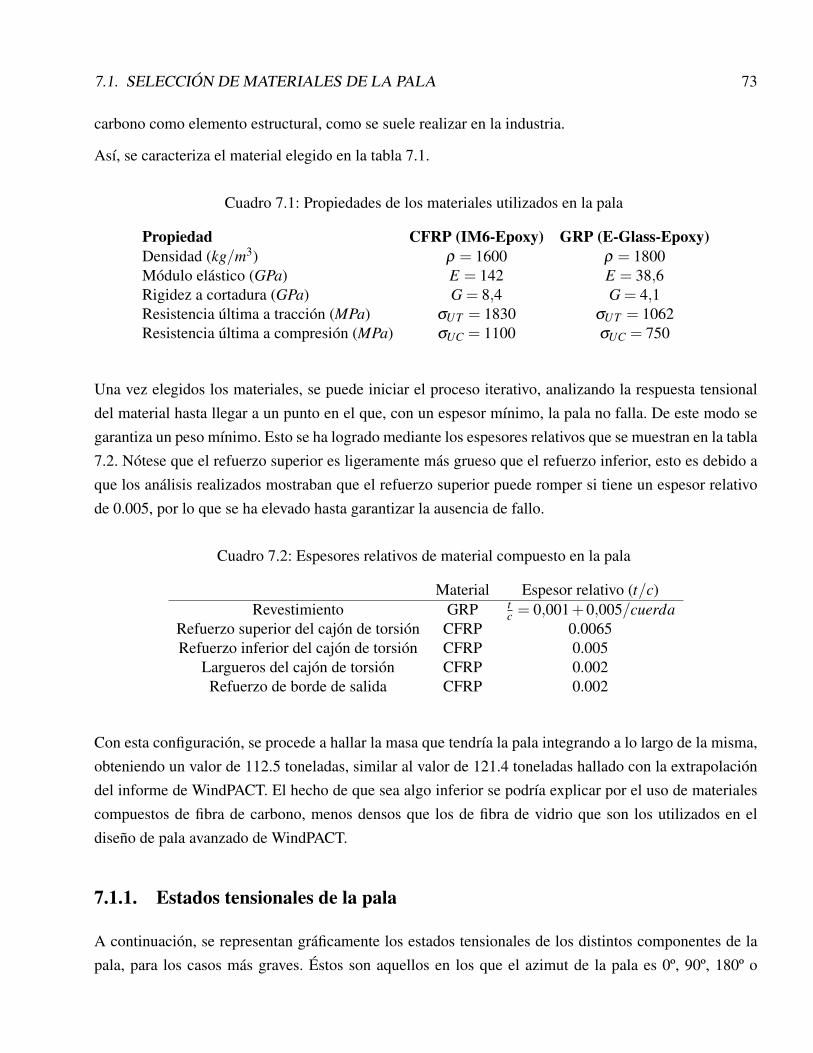
7.1. SELECCIÓN DE MATERIALES DE LA PALA 73
carbono como elemento estructural, como se suele realizar en la industria.
Así, se caracteriza el material elegido en la tabla 7.1.
Cuadro 7.1: Propiedades de los materiales utilizados en la pala
Propiedad CFRP (IM6-Epoxy) GRP (E-Glass-Epoxy)Densidad (kg/m3) ρ = 1600 ρ = 1800Módulo elástico (GPa) E = 142 E = 38,6Rigidez a cortadura (GPa) G = 8,4 G = 4,1Resistencia última a tracción (MPa) σUT = 1830 σUT = 1062Resistencia última a compresión (MPa) σUC = 1100 σUC = 750
Una vez elegidos los materiales, se puede iniciar el proceso iterativo, analizando la respuesta tensionaldel material hasta llegar a un punto en el que, con un espesor mínimo, la pala no falla. De este modo segarantiza un peso mínimo. Esto se ha logrado mediante los espesores relativos que se muestran en la tabla7.2. Nótese que el refuerzo superior es ligeramente más grueso que el refuerzo inferior, esto es debido aque los análisis realizados mostraban que el refuerzo superior puede romper si tiene un espesor relativode 0.005, por lo que se ha elevado hasta garantizar la ausencia de fallo.
Cuadro 7.2: Espesores relativos de material compuesto en la pala
Material Espesor relativo (t/c)Revestimiento GRP t
c = 0,001+0,005/cuerdaRefuerzo superior del cajón de torsión CFRP 0.0065Refuerzo inferior del cajón de torsión CFRP 0.005
Largueros del cajón de torsión CFRP 0.002Refuerzo de borde de salida CFRP 0.002
Con esta configuración, se procede a hallar la masa que tendría la pala integrando a lo largo de la misma,obteniendo un valor de 112.5 toneladas, similar al valor de 121.4 toneladas hallado con la extrapolacióndel informe de WindPACT. El hecho de que sea algo inferior se podría explicar por el uso de materialescompuestos de fibra de carbono, menos densos que los de fibra de vidrio que son los utilizados en eldiseño de pala avanzado de WindPACT.
7.1.1. Estados tensionales de la pala
A continuación, se representan gráficamente los estados tensionales de los distintos componentes de lapala, para los casos más graves. Éstos son aquellos en los que el azimut de la pala es 0º, 90º, 180º o
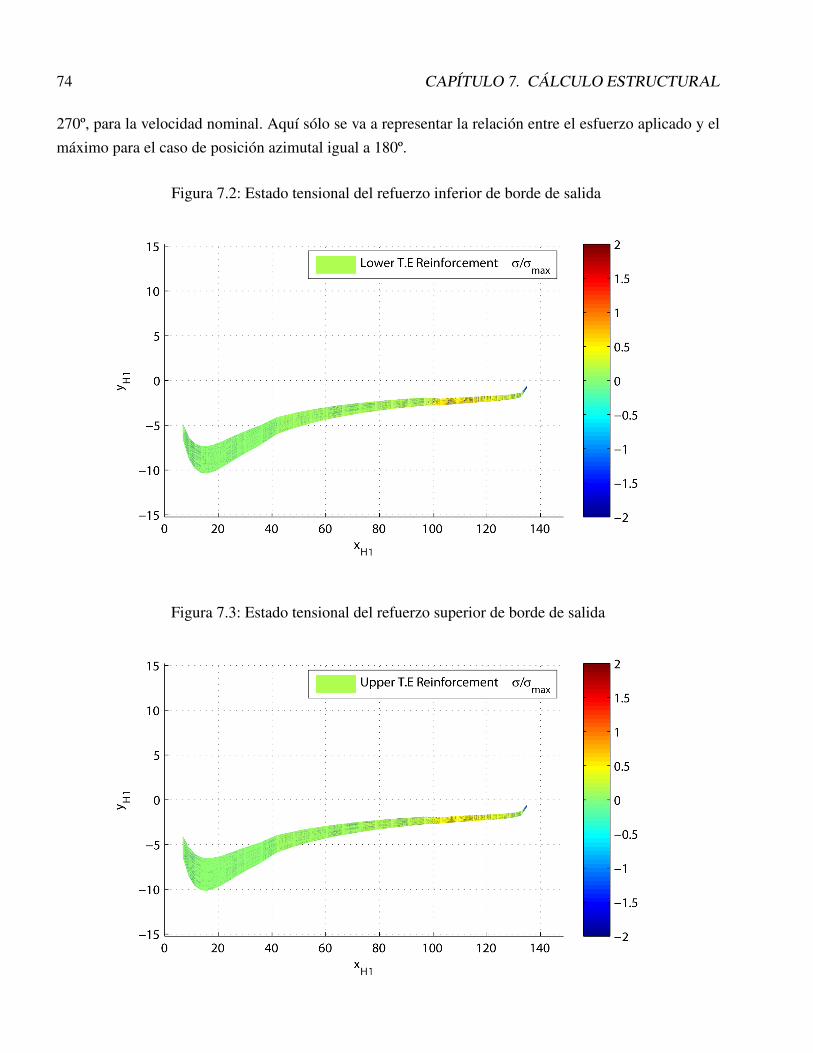
74 CAPÍTULO 7. CÁLCULO ESTRUCTURAL
270º, para la velocidad nominal. Aquí sólo se va a representar la relación entre el esfuerzo aplicado y elmáximo para el caso de posición azimutal igual a 180º.
Figura 7.2: Estado tensional del refuerzo inferior de borde de salida
Figura 7.3: Estado tensional del refuerzo superior de borde de salida
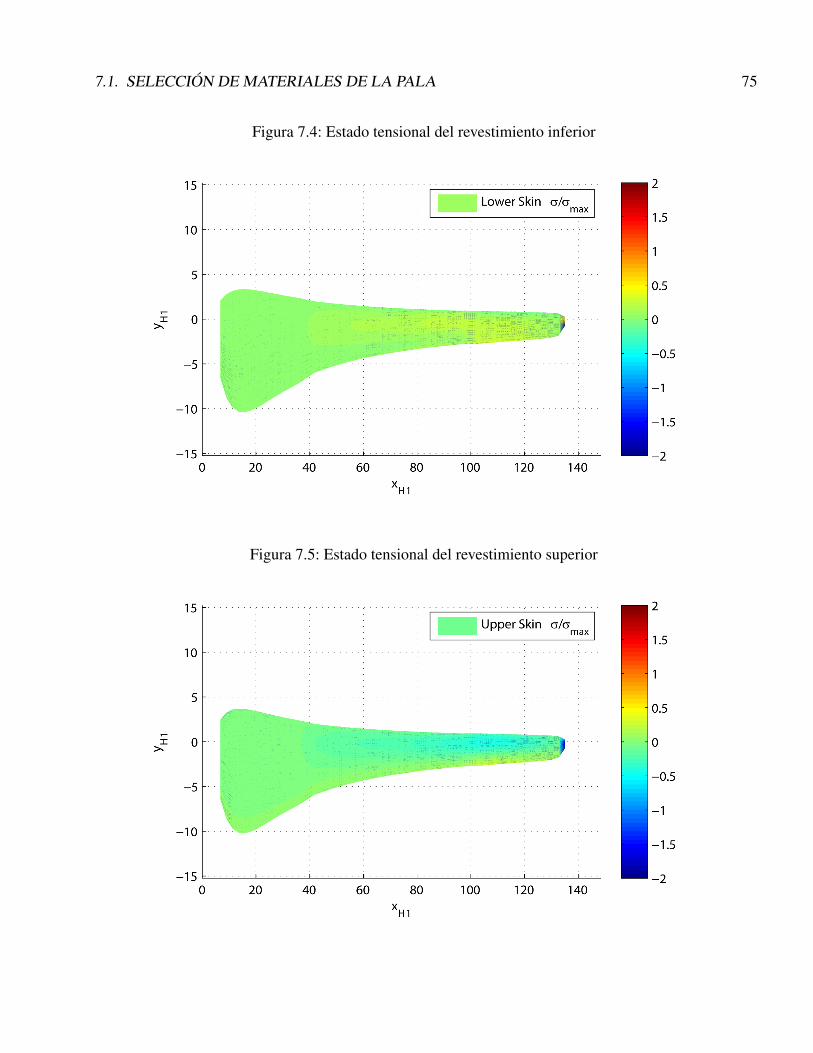
7.1. SELECCIÓN DE MATERIALES DE LA PALA 75
Figura 7.4: Estado tensional del revestimiento inferior
Figura 7.5: Estado tensional del revestimiento superior
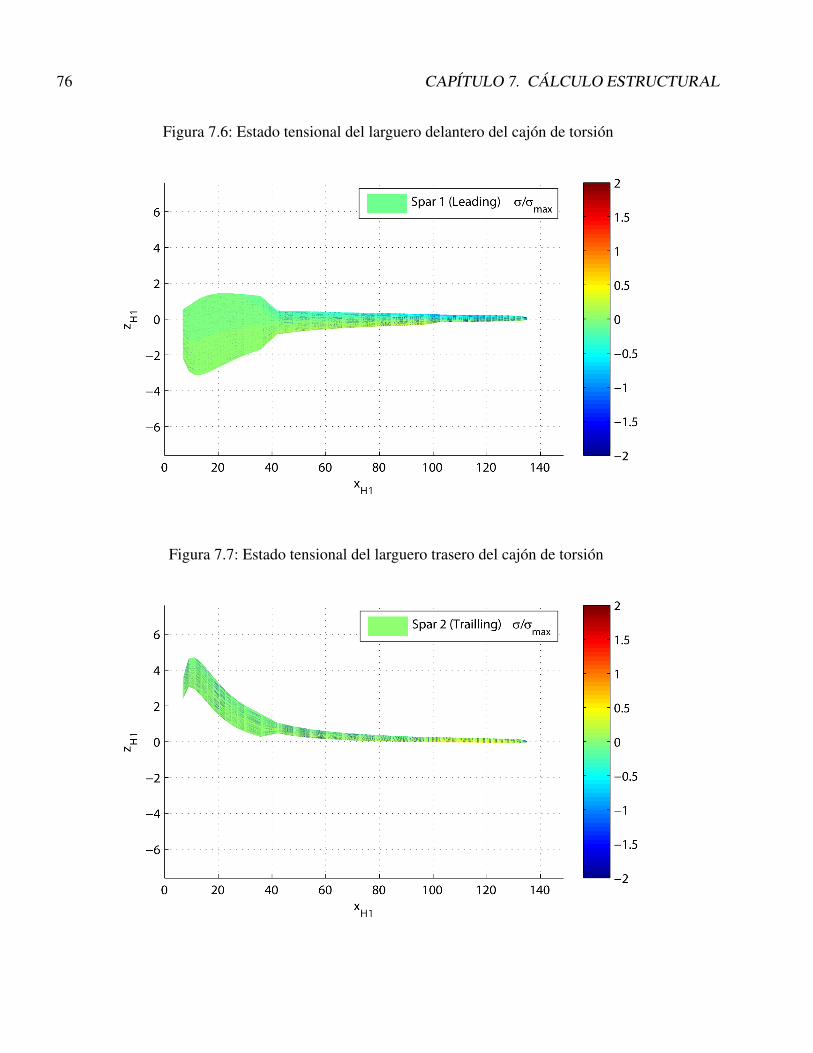
76 CAPÍTULO 7. CÁLCULO ESTRUCTURAL
Figura 7.6: Estado tensional del larguero delantero del cajón de torsión
Figura 7.7: Estado tensional del larguero trasero del cajón de torsión
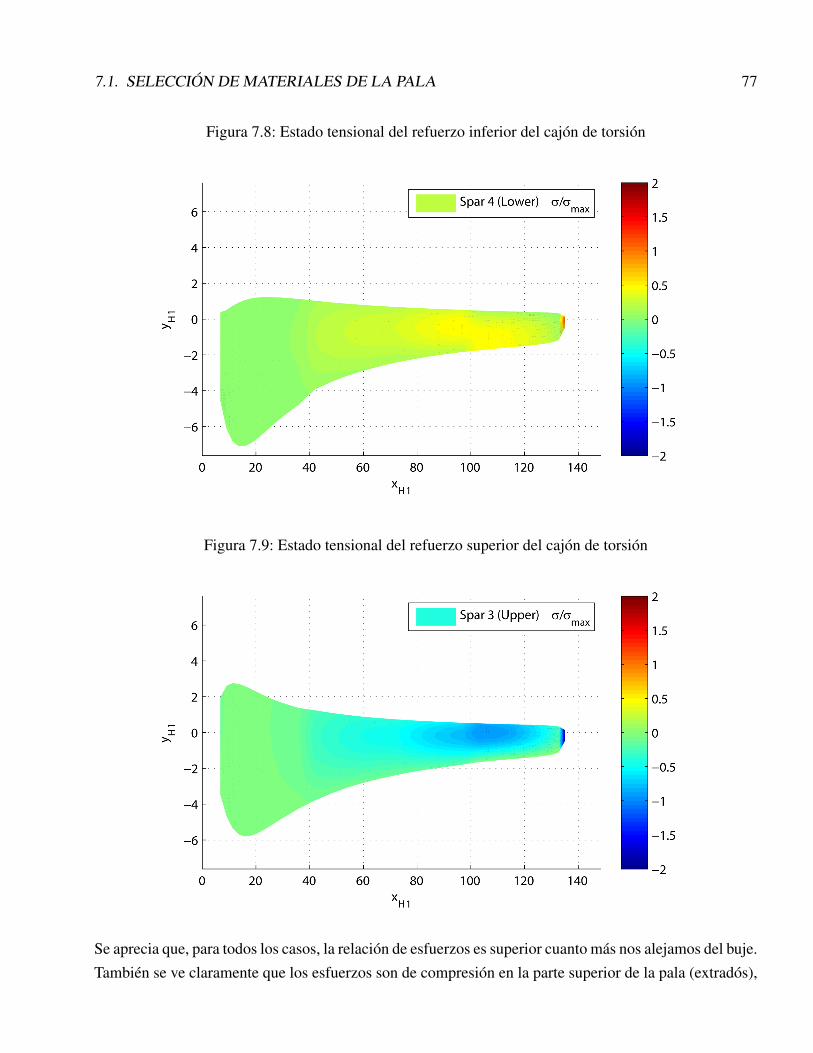
7.1. SELECCIÓN DE MATERIALES DE LA PALA 77
Figura 7.8: Estado tensional del refuerzo inferior del cajón de torsión
Figura 7.9: Estado tensional del refuerzo superior del cajón de torsión
Se aprecia que, para todos los casos, la relación de esfuerzos es superior cuanto más nos alejamos del buje.También se ve claramente que los esfuerzos son de compresión en la parte superior de la pala (extradós),
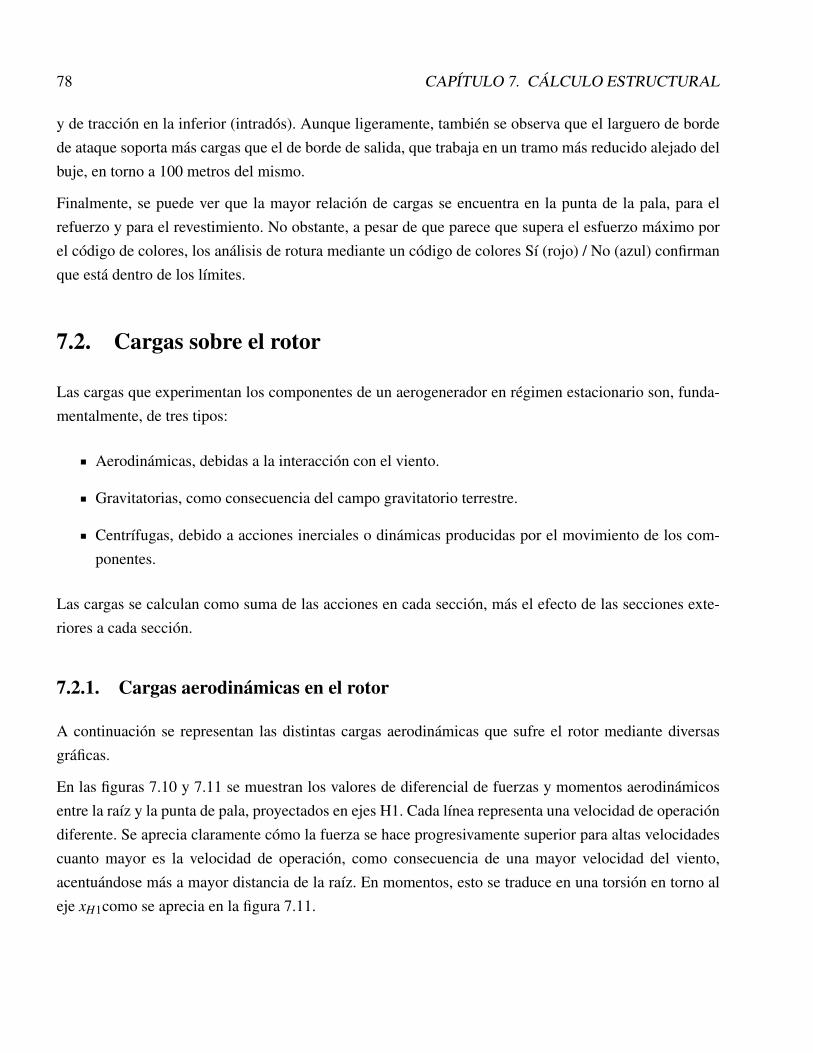
78 CAPÍTULO 7. CÁLCULO ESTRUCTURAL
y de tracción en la inferior (intradós). Aunque ligeramente, también se observa que el larguero de bordede ataque soporta más cargas que el de borde de salida, que trabaja en un tramo más reducido alejado delbuje, en torno a 100 metros del mismo.
Finalmente, se puede ver que la mayor relación de cargas se encuentra en la punta de la pala, para elrefuerzo y para el revestimiento. No obstante, a pesar de que parece que supera el esfuerzo máximo porel código de colores, los análisis de rotura mediante un código de colores Sí (rojo) / No (azul) confirmanque está dentro de los límites.
7.2. Cargas sobre el rotor
Las cargas que experimentan los componentes de un aerogenerador en régimen estacionario son, funda-mentalmente, de tres tipos:
Aerodinámicas, debidas a la interacción con el viento.
Gravitatorias, como consecuencia del campo gravitatorio terrestre.
Centrífugas, debido a acciones inerciales o dinámicas producidas por el movimiento de los com-ponentes.
Las cargas se calculan como suma de las acciones en cada sección, más el efecto de las secciones exte-riores a cada sección.
7.2.1. Cargas aerodinámicas en el rotor
A continuación se representan las distintas cargas aerodinámicas que sufre el rotor mediante diversasgráficas.
En las figuras 7.10 y 7.11 se muestran los valores de diferencial de fuerzas y momentos aerodinámicosentre la raíz y la punta de pala, proyectados en ejes H1. Cada línea representa una velocidad de operacióndiferente. Se aprecia claramente cómo la fuerza se hace progresivamente superior para altas velocidadescuanto mayor es la velocidad de operación, como consecuencia de una mayor velocidad del viento,acentuándose más a mayor distancia de la raíz. En momentos, esto se traduce en una torsión en torno aleje xH1como se aprecia en la figura 7.11.
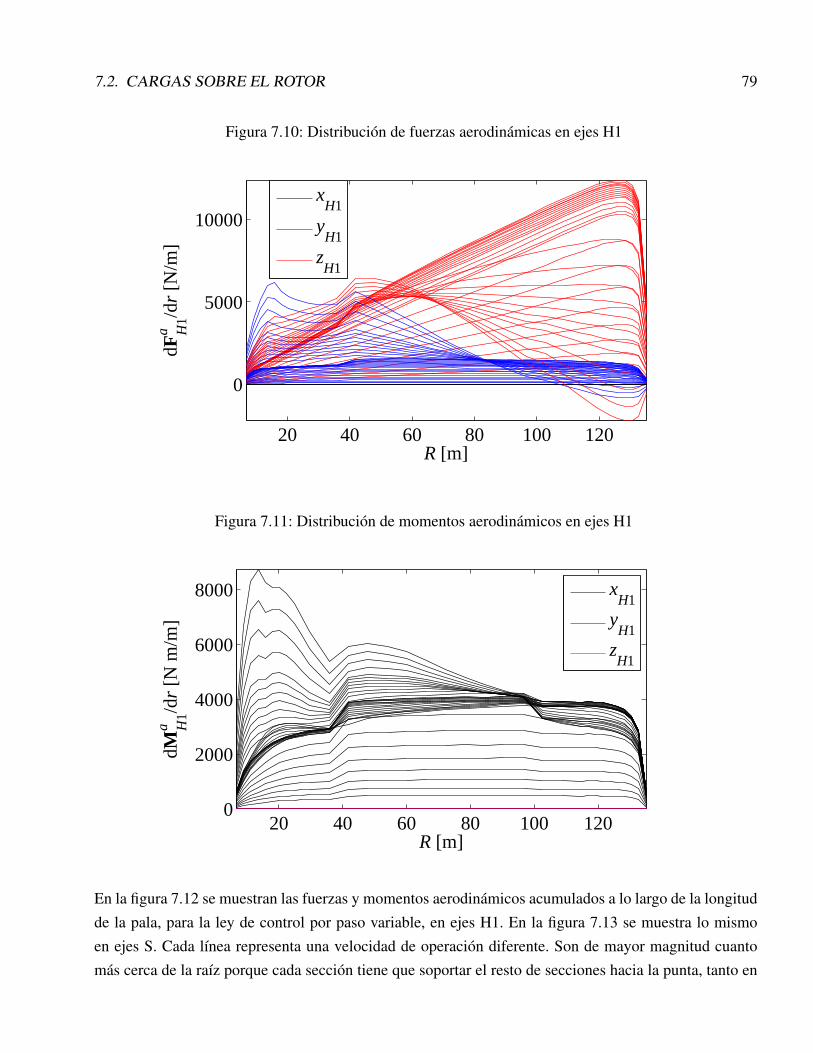
7.2. CARGAS SOBRE EL ROTOR 79
Figura 7.10: Distribución de fuerzas aerodinámicas en ejes H1
20 40 60 80 100 120
0
5000
10000
R [m]
dFa H
1/dr
[N/m
]
x
H1
yH1
zH1
Figura 7.11: Distribución de momentos aerodinámicos en ejes H1
20 40 60 80 100 1200
2000
4000
6000
8000
R [m]
dMa H
1/dr
[N m
/m]
xH1
yH1
zH1
En la figura 7.12 se muestran las fuerzas y momentos aerodinámicos acumulados a lo largo de la longitudde la pala, para la ley de control por paso variable, en ejes H1. En la figura 7.13 se muestra lo mismoen ejes S. Cada línea representa una velocidad de operación diferente. Son de mayor magnitud cuantomás cerca de la raíz porque cada sección tiene que soportar el resto de secciones hacia la punta, tanto en
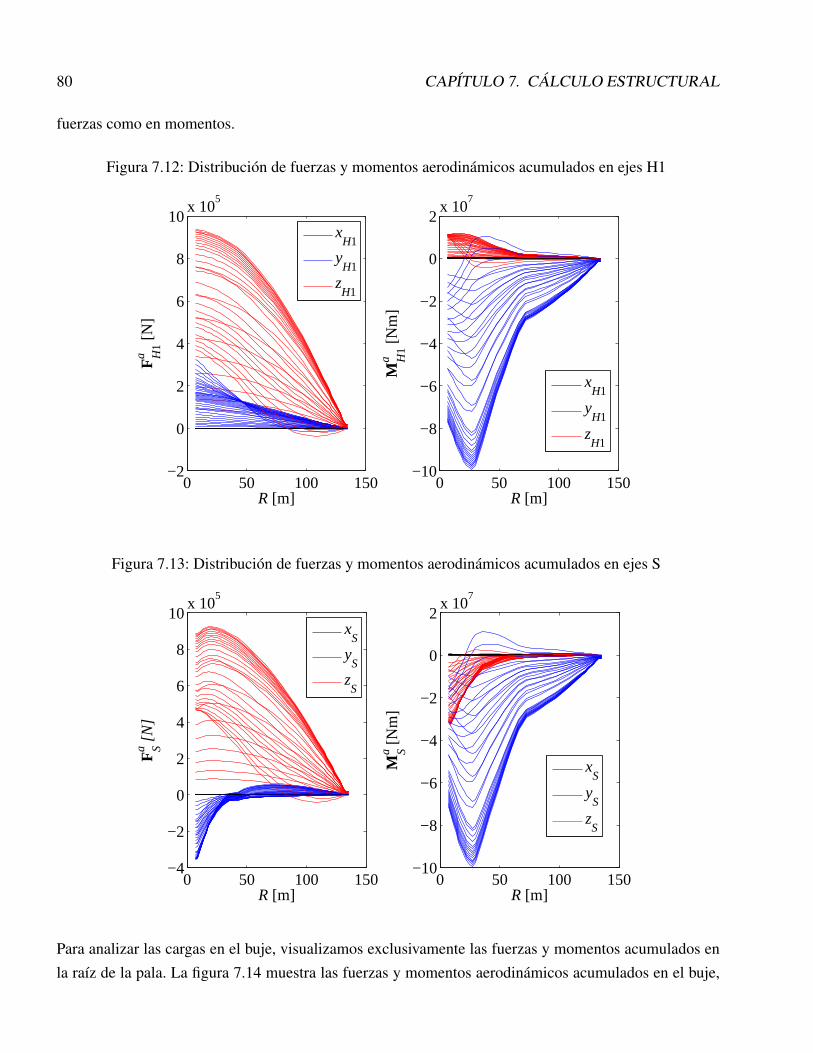
80 CAPÍTULO 7. CÁLCULO ESTRUCTURAL
fuerzas como en momentos.
Figura 7.12: Distribución de fuerzas y momentos aerodinámicos acumulados en ejes H1
0 50 100 150−2
0
2
4
6
8
10x 10
5
R [m]
Fa H
1 [N]
0 50 100 150−10
−8
−6
−4
−2
0
2x 10
7
R [m]
Ma H
1 [Nm
]
xH1
yH1
zH1
xH1
yH1
zH1
Figura 7.13: Distribución de fuerzas y momentos aerodinámicos acumulados en ejes S
0 50 100 150−4
−2
0
2
4
6
8
10x 10
5
R [m]
Fa S [
N]
0 50 100 150−10
−8
−6
−4
−2
0
2x 10
7
R [m]
Ma S [N
m]
xS
yS
zS
xS
yS
zS
Para analizar las cargas en el buje, visualizamos exclusivamente las fuerzas y momentos acumulados enla raíz de la pala. La figura 7.14 muestra las fuerzas y momentos aerodinámicos acumulados en el buje,
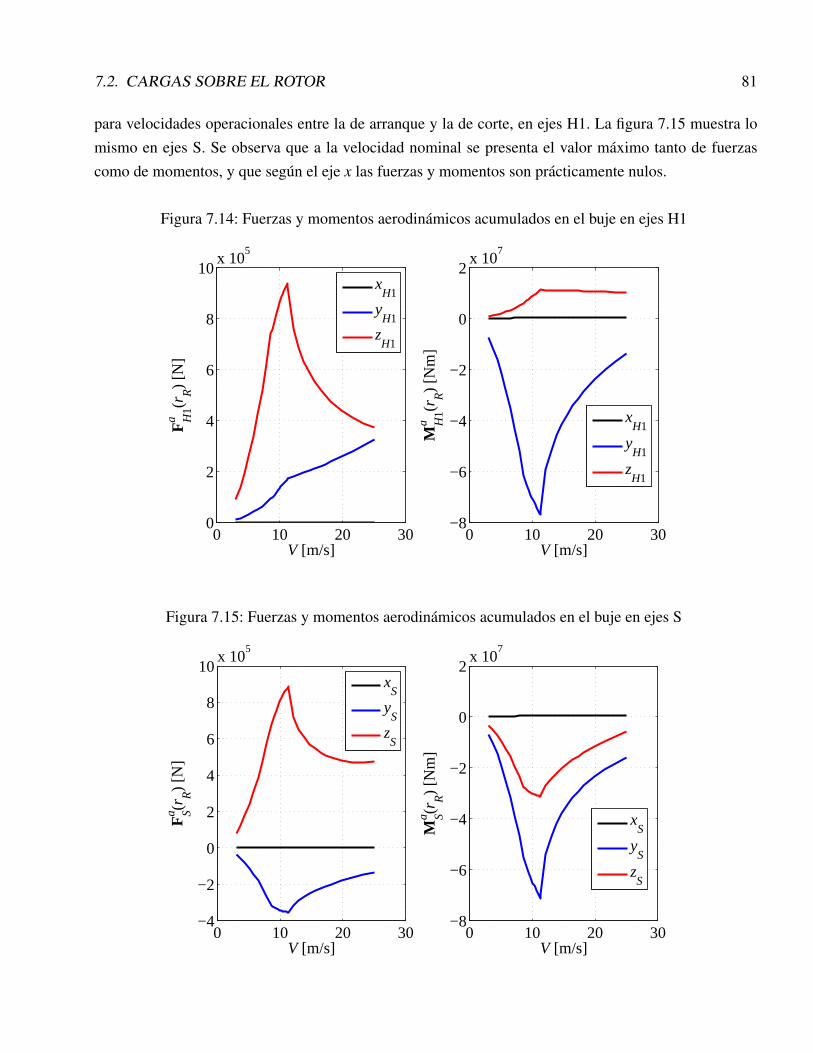
7.2. CARGAS SOBRE EL ROTOR 81
para velocidades operacionales entre la de arranque y la de corte, en ejes H1. La figura 7.15 muestra lomismo en ejes S. Se observa que a la velocidad nominal se presenta el valor máximo tanto de fuerzascomo de momentos, y que según el eje x las fuerzas y momentos son prácticamente nulos.
Figura 7.14: Fuerzas y momentos aerodinámicos acumulados en el buje en ejes H1
0 10 20 300
2
4
6
8
10x 10
5
V [m/s]
Fa H
1(rR)
[N]
xH1
yH1
zH1
0 10 20 30−8
−6
−4
−2
0
2x 10
7
V [m/s]
Ma H
1(rR)
[Nm
]
xH1
yH1
zH1
Figura 7.15: Fuerzas y momentos aerodinámicos acumulados en el buje en ejes S
0 10 20 30−4
−2
0
2
4
6
8
10x 10
5
V [m/s]
Fa S(r
R)
[N]
xS
yS
zS
0 10 20 30−8
−6
−4
−2
0
2x 10
7
V [m/s]
Ma S(r
R)
[Nm
]
xS
yS
zS
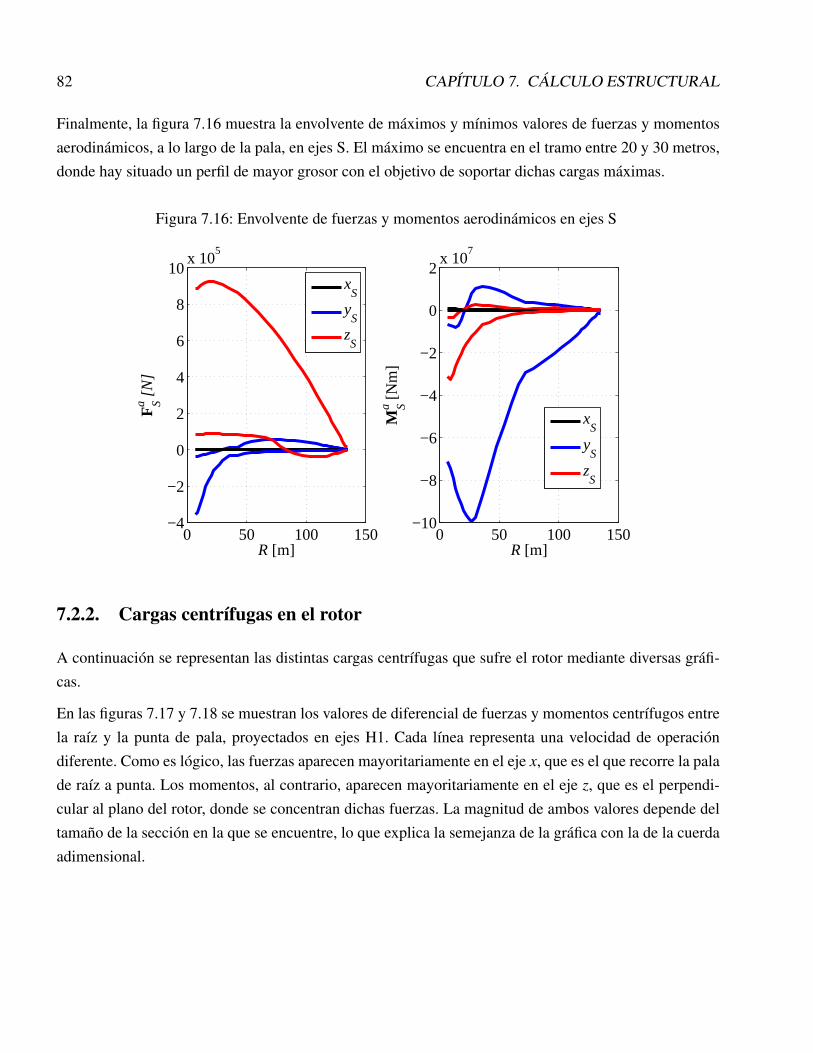
82 CAPÍTULO 7. CÁLCULO ESTRUCTURAL
Finalmente, la figura 7.16 muestra la envolvente de máximos y mínimos valores de fuerzas y momentosaerodinámicos, a lo largo de la pala, en ejes S. El máximo se encuentra en el tramo entre 20 y 30 metros,donde hay situado un perfil de mayor grosor con el objetivo de soportar dichas cargas máximas.
Figura 7.16: Envolvente de fuerzas y momentos aerodinámicos en ejes S
0 50 100 150−4
−2
0
2
4
6
8
10x 10
5
R [m]
Fa S [
N]
xS
yS
zS
0 50 100 150−10
−8
−6
−4
−2
0
2x 10
7
R [m]
Ma S [N
m]
xS
yS
zS
7.2.2. Cargas centrífugas en el rotor
A continuación se representan las distintas cargas centrífugas que sufre el rotor mediante diversas gráfi-cas.
En las figuras 7.17 y 7.18 se muestran los valores de diferencial de fuerzas y momentos centrífugos entrela raíz y la punta de pala, proyectados en ejes H1. Cada línea representa una velocidad de operacióndiferente. Como es lógico, las fuerzas aparecen mayoritariamente en el eje x, que es el que recorre la palade raíz a punta. Los momentos, al contrario, aparecen mayoritariamente en el eje z, que es el perpendi-cular al plano del rotor, donde se concentran dichas fuerzas. La magnitud de ambos valores depende deltamaño de la sección en la que se encuentre, lo que explica la semejanza de la gráfica con la de la cuerdaadimensional.
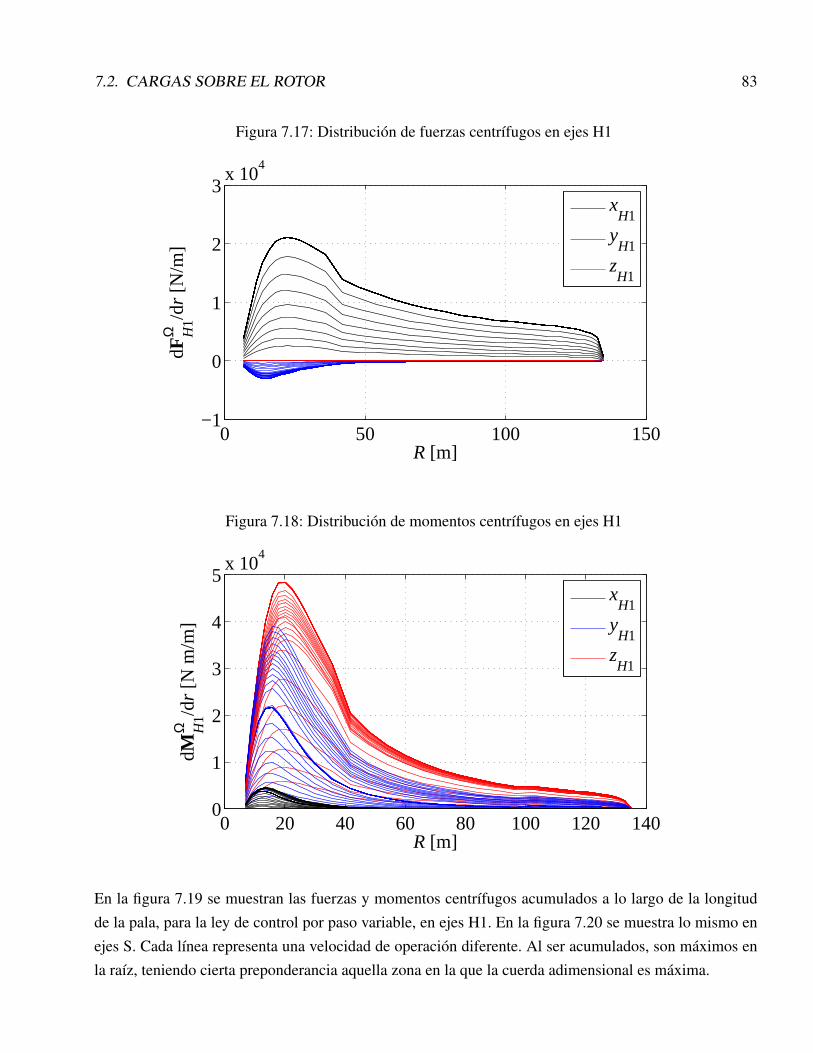
7.2. CARGAS SOBRE EL ROTOR 83
Figura 7.17: Distribución de fuerzas centrífugos en ejes H1
0 50 100 150−1
0
1
2
3x 10
4
R [m]
dFΩ H
1/dr
[N/m
]
xH1
yH1
zH1
Figura 7.18: Distribución de momentos centrífugos en ejes H1
0 20 40 60 80 100 120 1400
1
2
3
4
5x 10
4
R [m]
dMΩ H
1/dr
[N m
/m]
xH1
yH1
zH1
En la figura 7.19 se muestran las fuerzas y momentos centrífugos acumulados a lo largo de la longitudde la pala, para la ley de control por paso variable, en ejes H1. En la figura 7.20 se muestra lo mismo enejes S. Cada línea representa una velocidad de operación diferente. Al ser acumulados, son máximos enla raíz, teniendo cierta preponderancia aquella zona en la que la cuerda adimensional es máxima.
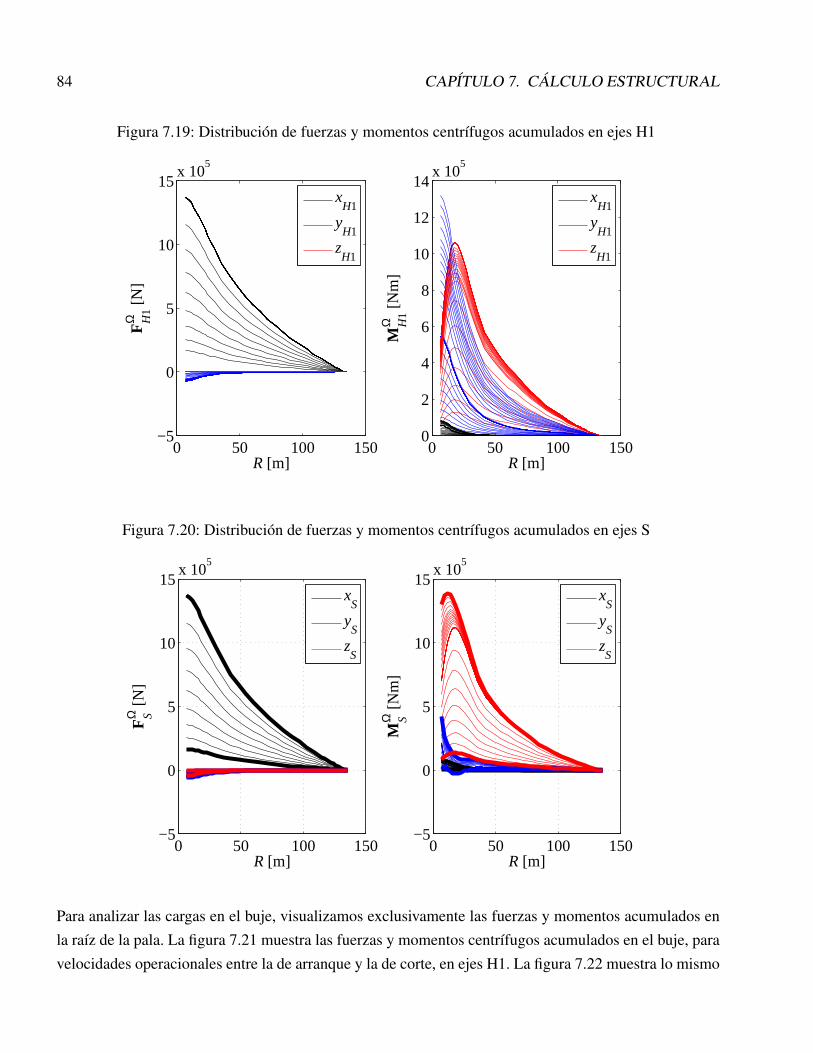
84 CAPÍTULO 7. CÁLCULO ESTRUCTURAL
Figura 7.19: Distribución de fuerzas y momentos centrífugos acumulados en ejes H1
0 50 100 150−5
0
5
10
15x 10
5
R [m]
FΩ H
1 [N]
0 50 100 1500
2
4
6
8
10
12
14x 10
5
R [m]
MΩ H
1 [Nm
]
xH1
yH1
zH1
xH1
yH1
zH1
Figura 7.20: Distribución de fuerzas y momentos centrífugos acumulados en ejes S
0 50 100 150−5
0
5
10
15x 10
5
R [m]
FΩ S
[N]
0 50 100 150−5
0
5
10
15x 10
5
R [m]
MΩ S
[Nm
]
xS
yS
zS
xS
yS
zS
Para analizar las cargas en el buje, visualizamos exclusivamente las fuerzas y momentos acumulados enla raíz de la pala. La figura 7.21 muestra las fuerzas y momentos centrífugos acumulados en el buje, paravelocidades operacionales entre la de arranque y la de corte, en ejes H1. La figura 7.22 muestra lo mismo
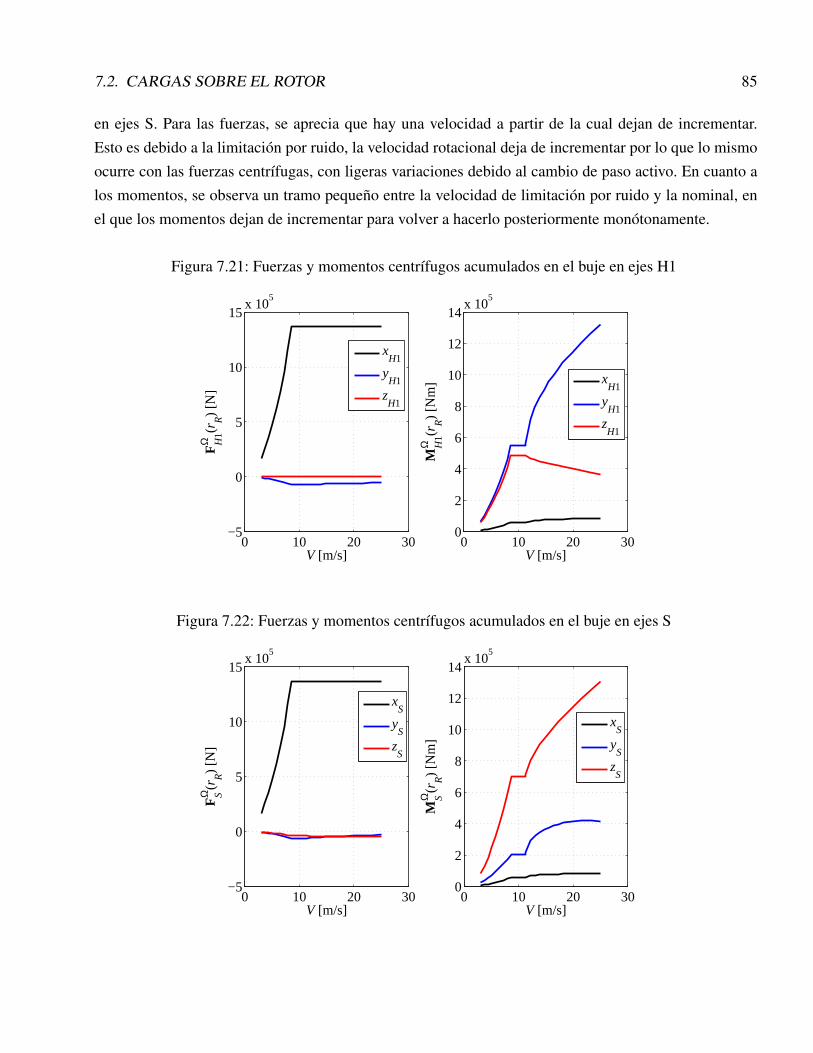
7.2. CARGAS SOBRE EL ROTOR 85
en ejes S. Para las fuerzas, se aprecia que hay una velocidad a partir de la cual dejan de incrementar.Esto es debido a la limitación por ruido, la velocidad rotacional deja de incrementar por lo que lo mismoocurre con las fuerzas centrífugas, con ligeras variaciones debido al cambio de paso activo. En cuanto alos momentos, se observa un tramo pequeño entre la velocidad de limitación por ruido y la nominal, enel que los momentos dejan de incrementar para volver a hacerlo posteriormente monótonamente.
Figura 7.21: Fuerzas y momentos centrífugos acumulados en el buje en ejes H1
0 10 20 30−5
0
5
10
15x 10
5
V [m/s]
FΩ H
1(rR)
[N]
xH1
yH1
zH1
0 10 20 300
2
4
6
8
10
12
14x 10
5
V [m/s]
MΩ H
1(rR)
[Nm
]
xH1
yH1
zH1
Figura 7.22: Fuerzas y momentos centrífugos acumulados en el buje en ejes S
0 10 20 30−5
0
5
10
15x 10
5
V [m/s]
FΩ S
(rR)
[N]
xS
yS
zS
0 10 20 300
2
4
6
8
10
12
14x 10
5
V [m/s]
MΩ S
(rR)
[Nm
]
xS
yS
zS
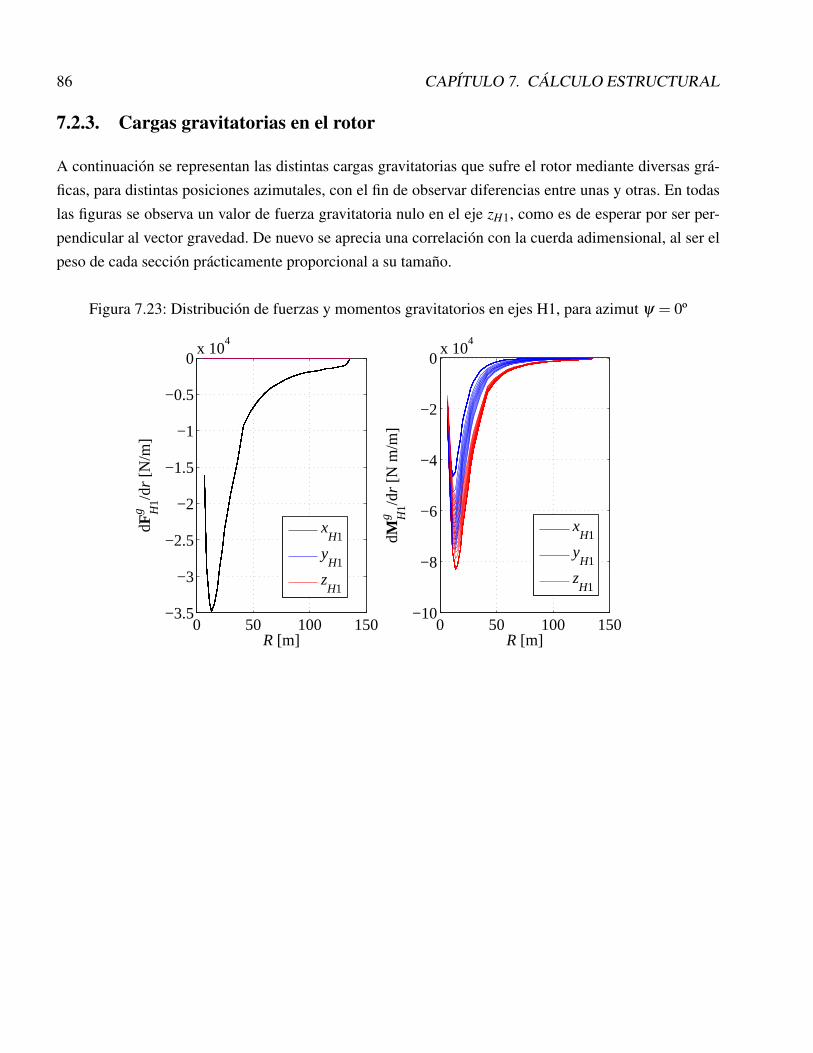
86 CAPÍTULO 7. CÁLCULO ESTRUCTURAL
7.2.3. Cargas gravitatorias en el rotor
A continuación se representan las distintas cargas gravitatorias que sufre el rotor mediante diversas grá-ficas, para distintas posiciones azimutales, con el fin de observar diferencias entre unas y otras. En todaslas figuras se observa un valor de fuerza gravitatoria nulo en el eje zH1, como es de esperar por ser per-pendicular al vector gravedad. De nuevo se aprecia una correlación con la cuerda adimensional, al ser elpeso de cada sección prácticamente proporcional a su tamaño.
Figura 7.23: Distribución de fuerzas y momentos gravitatorios en ejes H1, para azimut ψ = 0º
0 50 100 150−3.5
−3
−2.5
−2
−1.5
−1
−0.5
0x 10
4
R [m]
dFg H
1/dr
[N/m
]
0 50 100 150−10
−8
−6
−4
−2
0x 10
4
R [m]
dMg H
1/dr
[N m
/m]
xH1
yH1
zH1
xH1
yH1
zH1
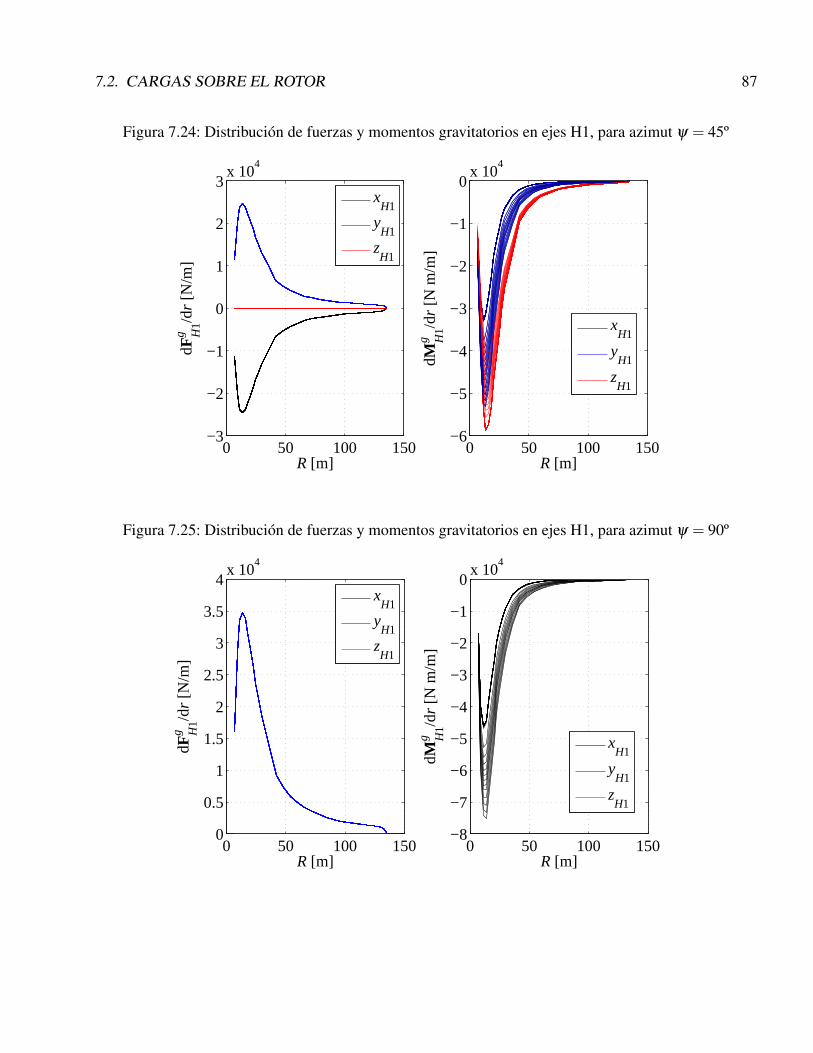
7.2. CARGAS SOBRE EL ROTOR 87
Figura 7.24: Distribución de fuerzas y momentos gravitatorios en ejes H1, para azimut ψ = 45º
0 50 100 150−3
−2
−1
0
1
2
3x 10
4
R [m]
dFg H
1/dr
[N/m
]
0 50 100 150−6
−5
−4
−3
−2
−1
0x 10
4
R [m]
dMg H
1/dr
[N m
/m]
xH1
yH1
zH1
xH1
yH1
zH1
Figura 7.25: Distribución de fuerzas y momentos gravitatorios en ejes H1, para azimut ψ = 90º
0 50 100 1500
0.5
1
1.5
2
2.5
3
3.5
4x 10
4
R [m]
dFg H
1/dr
[N/m
]
0 50 100 150−8
−7
−6
−5
−4
−3
−2
−1
0x 10
4
R [m]
dMg H
1/dr
[N m
/m]
xH1
yH1
zH1
xH1
yH1
zH1
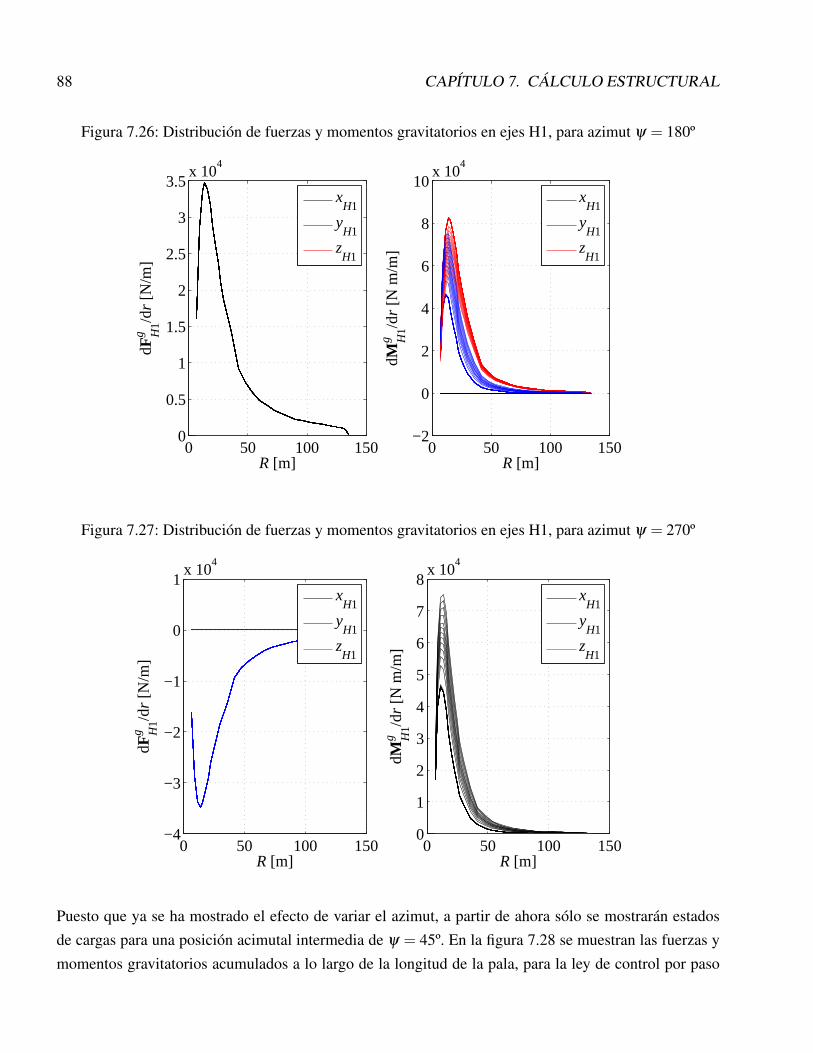
88 CAPÍTULO 7. CÁLCULO ESTRUCTURAL
Figura 7.26: Distribución de fuerzas y momentos gravitatorios en ejes H1, para azimut ψ = 180º
0 50 100 1500
0.5
1
1.5
2
2.5
3
3.5x 10
4
R [m]
dFg H
1/dr
[N/m
]
0 50 100 150−2
0
2
4
6
8
10x 10
4
R [m]
dMg H
1/dr
[N m
/m]
xH1
yH1
zH1
xH1
yH1
zH1
Figura 7.27: Distribución de fuerzas y momentos gravitatorios en ejes H1, para azimut ψ = 270º
0 50 100 150−4
−3
−2
−1
0
1x 10
4
R [m]
dFg H
1/dr
[N/m
]
0 50 100 1500
1
2
3
4
5
6
7
8x 10
4
R [m]
dMg H
1/dr
[N m
/m]
xH1
yH1
zH1
xH1
yH1
zH1
Puesto que ya se ha mostrado el efecto de variar el azimut, a partir de ahora sólo se mostrarán estadosde cargas para una posición acimutal intermedia de ψ = 45º. En la figura 7.28 se muestran las fuerzas ymomentos gravitatorios acumulados a lo largo de la longitud de la pala, para la ley de control por paso
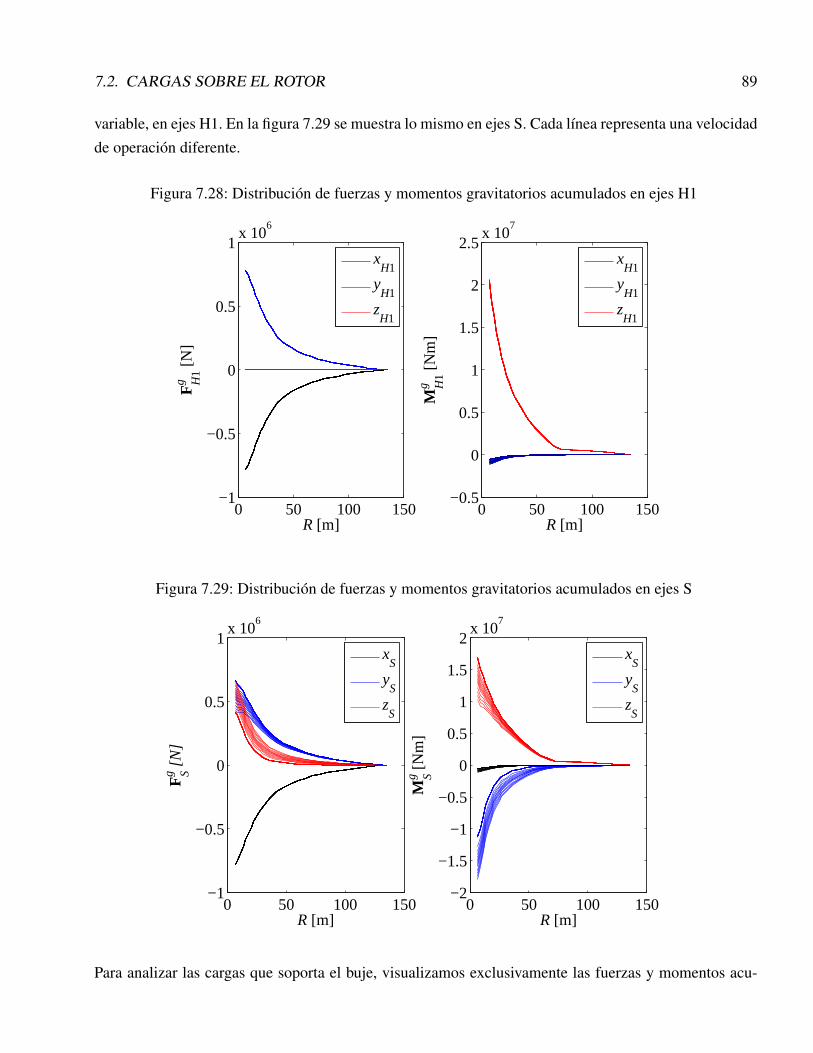
7.2. CARGAS SOBRE EL ROTOR 89
variable, en ejes H1. En la figura 7.29 se muestra lo mismo en ejes S. Cada línea representa una velocidadde operación diferente.
Figura 7.28: Distribución de fuerzas y momentos gravitatorios acumulados en ejes H1
0 50 100 150−1
−0.5
0
0.5
1x 10
6
R [m]
Fg H
1 [N]
0 50 100 150−0.5
0
0.5
1
1.5
2
2.5x 10
7
R [m]
Mg H
1 [Nm
]
xH1
yH1
zH1
xH1
yH1
zH1
Figura 7.29: Distribución de fuerzas y momentos gravitatorios acumulados en ejes S
0 50 100 150−1
−0.5
0
0.5
1x 10
6
R [m]
Fg S [
N]
0 50 100 150−2
−1.5
−1
−0.5
0
0.5
1
1.5
2x 10
7
R [m]
Mg S [N
m]
xS
yS
zS
xS
yS
zS
Para analizar las cargas que soporta el buje, visualizamos exclusivamente las fuerzas y momentos acu-
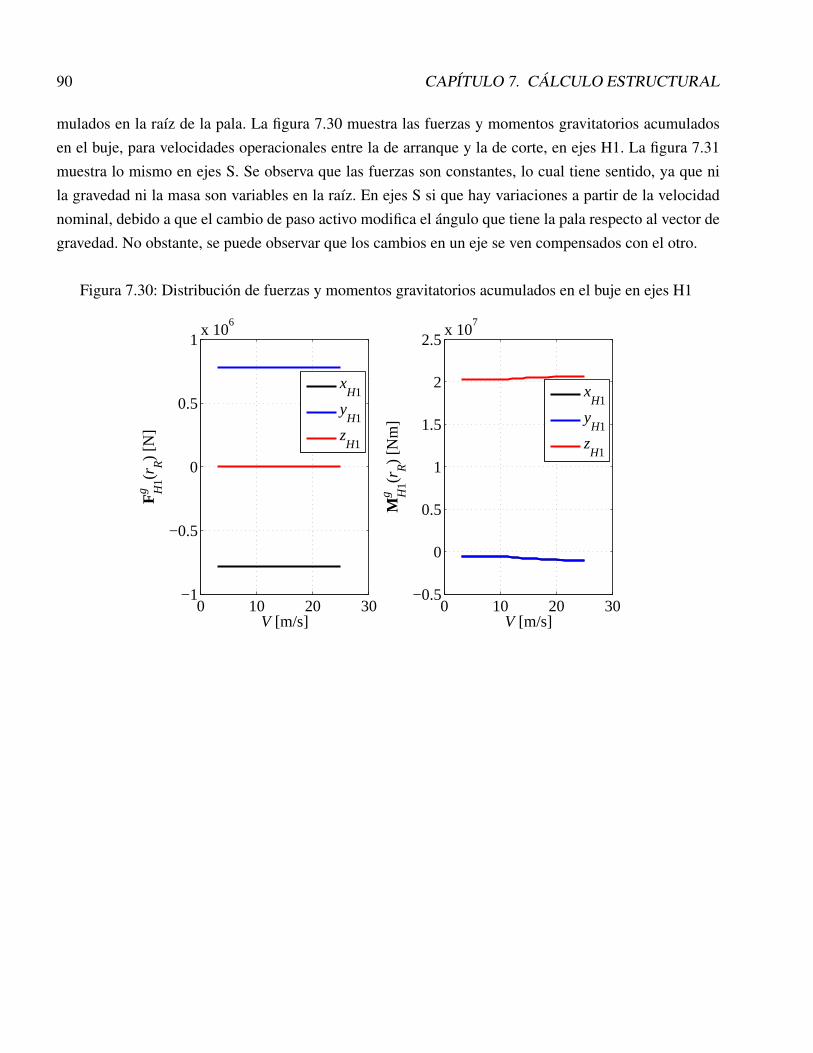
90 CAPÍTULO 7. CÁLCULO ESTRUCTURAL
mulados en la raíz de la pala. La figura 7.30 muestra las fuerzas y momentos gravitatorios acumuladosen el buje, para velocidades operacionales entre la de arranque y la de corte, en ejes H1. La figura 7.31muestra lo mismo en ejes S. Se observa que las fuerzas son constantes, lo cual tiene sentido, ya que nila gravedad ni la masa son variables en la raíz. En ejes S si que hay variaciones a partir de la velocidadnominal, debido a que el cambio de paso activo modifica el ángulo que tiene la pala respecto al vector degravedad. No obstante, se puede observar que los cambios en un eje se ven compensados con el otro.
Figura 7.30: Distribución de fuerzas y momentos gravitatorios acumulados en el buje en ejes H1
0 10 20 30−1
−0.5
0
0.5
1x 10
6
V [m/s]
Fg H
1(rR)
[N]
xH1
yH1
zH1
0 10 20 30−0.5
0
0.5
1
1.5
2
2.5x 10
7
V [m/s]
Mg H
1(rR)
[Nm
]
xH1
yH1
zH1
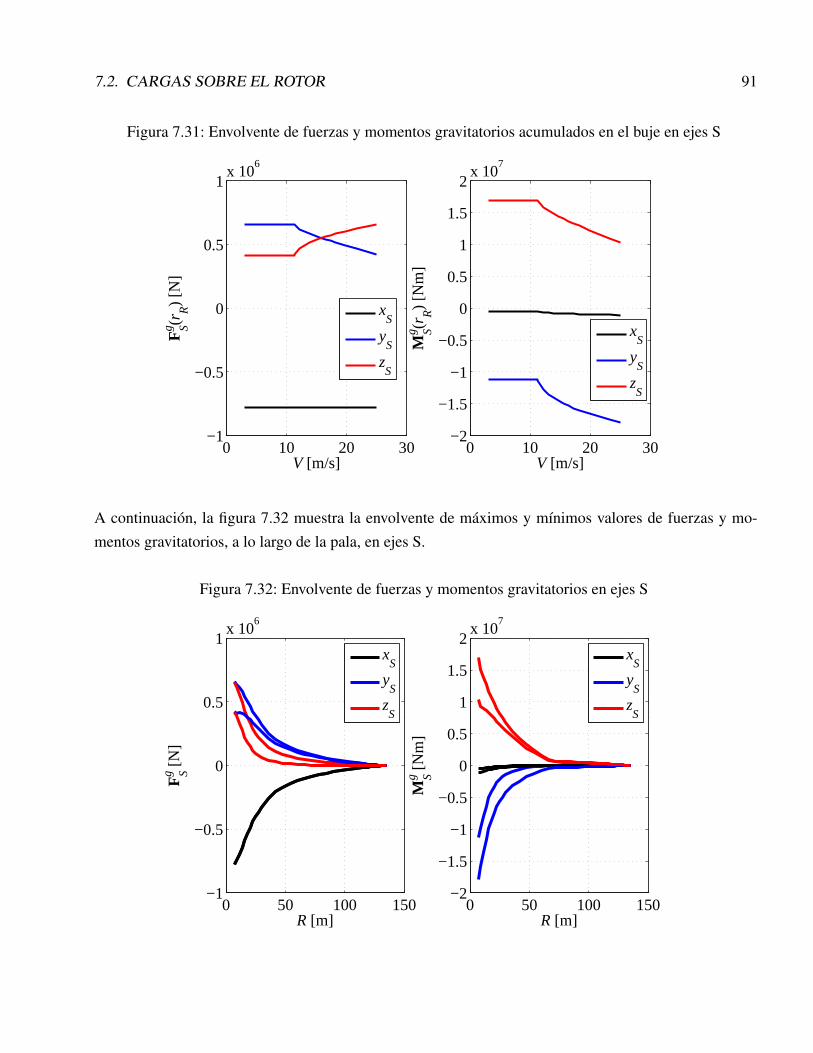
7.2. CARGAS SOBRE EL ROTOR 91
Figura 7.31: Envolvente de fuerzas y momentos gravitatorios acumulados en el buje en ejes S
0 10 20 30−1
−0.5
0
0.5
1x 10
6
V [m/s]
Fg S(r
R)
[N]
xS
yS
zS
0 10 20 30−2
−1.5
−1
−0.5
0
0.5
1
1.5
2x 10
7
V [m/s]
Mg S(r
R)
[Nm
]
xS
yS
zS
A continuación, la figura 7.32 muestra la envolvente de máximos y mínimos valores de fuerzas y mo-mentos gravitatorios, a lo largo de la pala, en ejes S.
Figura 7.32: Envolvente de fuerzas y momentos gravitatorios en ejes S
0 50 100 150−1
−0.5
0
0.5
1x 10
6
R [m]
Fg S [N
]
xS
yS
zS
0 50 100 150−2
−1.5
−1
−0.5
0
0.5
1
1.5
2x 10
7
R [m]
Mg S [N
m]
xS
yS
zS
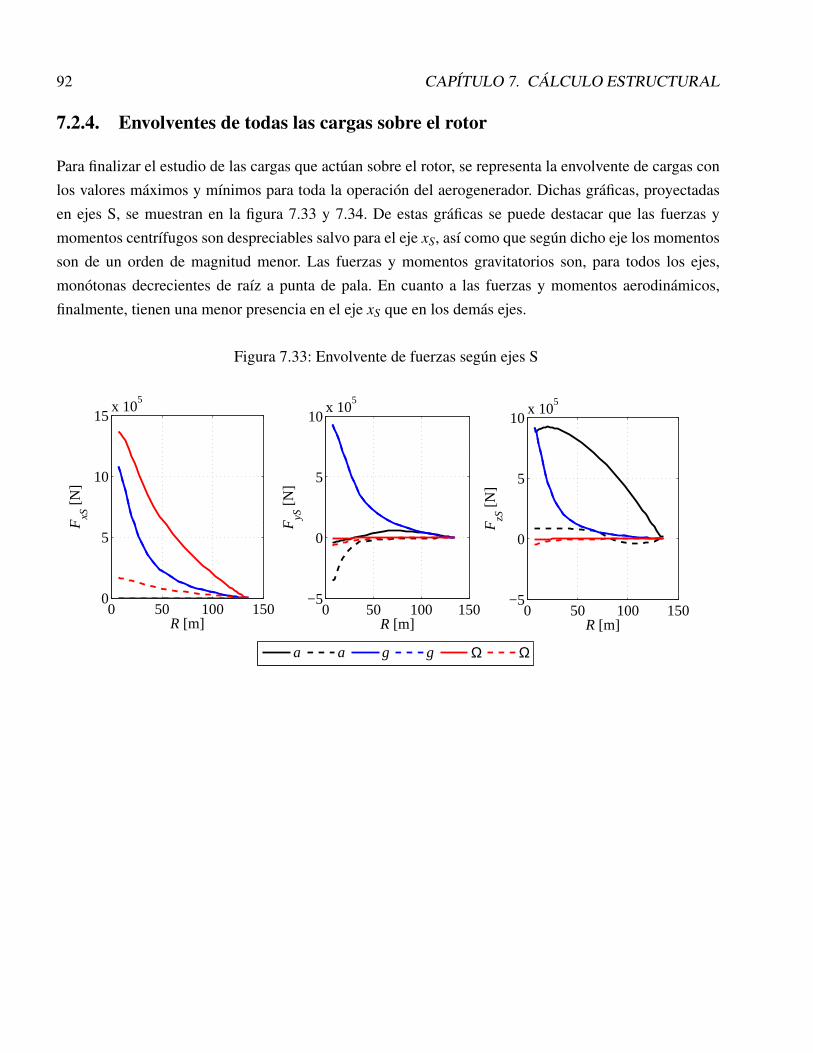
92 CAPÍTULO 7. CÁLCULO ESTRUCTURAL
7.2.4. Envolventes de todas las cargas sobre el rotor
Para finalizar el estudio de las cargas que actúan sobre el rotor, se representa la envolvente de cargas conlos valores máximos y mínimos para toda la operación del aerogenerador. Dichas gráficas, proyectadasen ejes S, se muestran en la figura 7.33 y 7.34. De estas gráficas se puede destacar que las fuerzas ymomentos centrífugos son despreciables salvo para el eje xS, así como que según dicho eje los momentosson de un orden de magnitud menor. Las fuerzas y momentos gravitatorios son, para todos los ejes,monótonas decrecientes de raíz a punta de pala. En cuanto a las fuerzas y momentos aerodinámicos,finalmente, tienen una menor presencia en el eje xS que en los demás ejes.
Figura 7.33: Envolvente de fuerzas según ejes S
0 50 100 1500
5
10
15x 10
5
R [m]
FxS
[N]
a a g g Ω Ω
0 50 100 150−5
0
5
10x 10
5
R [m]
FyS
[N]
0 50 100 150−5
0
5
10x 10
5
R [m]
FzS
[N]
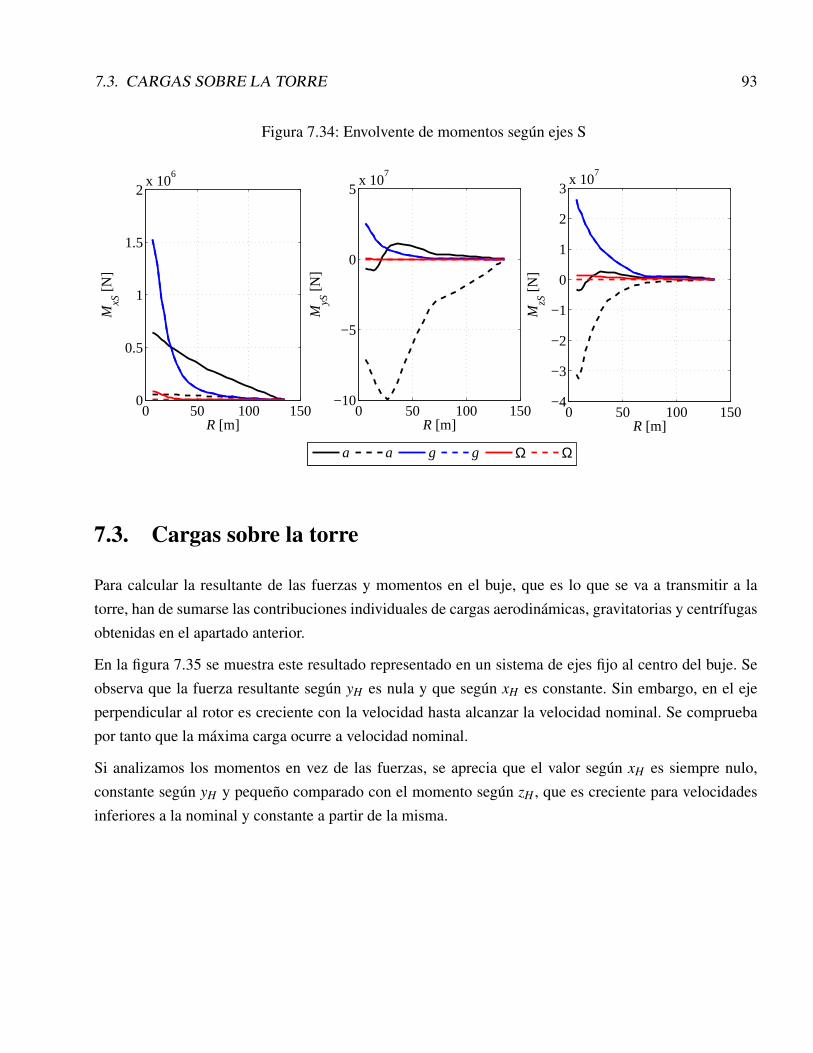
7.3. CARGAS SOBRE LA TORRE 93
Figura 7.34: Envolvente de momentos según ejes S
0 50 100 1500
0.5
1
1.5
2x 10
6
R [m]
MxS
[N]
0 50 100 150−10
−5
0
5x 10
7
R [m]
MyS
[N]
0 50 100 150−4
−3
−2
−1
0
1
2
3x 10
7
R [m]
MzS
[N]
a a g g Ω Ω
7.3. Cargas sobre la torre
Para calcular la resultante de las fuerzas y momentos en el buje, que es lo que se va a transmitir a latorre, han de sumarse las contribuciones individuales de cargas aerodinámicas, gravitatorias y centrífugasobtenidas en el apartado anterior.
En la figura 7.35 se muestra este resultado representado en un sistema de ejes fijo al centro del buje. Seobserva que la fuerza resultante según yH es nula y que según xH es constante. Sin embargo, en el ejeperpendicular al rotor es creciente con la velocidad hasta alcanzar la velocidad nominal. Se compruebapor tanto que la máxima carga ocurre a velocidad nominal.
Si analizamos los momentos en vez de las fuerzas, se aprecia que el valor según xH es siempre nulo,constante según yH y pequeño comparado con el momento según zH , que es creciente para velocidadesinferiores a la nominal y constante a partir de la misma.
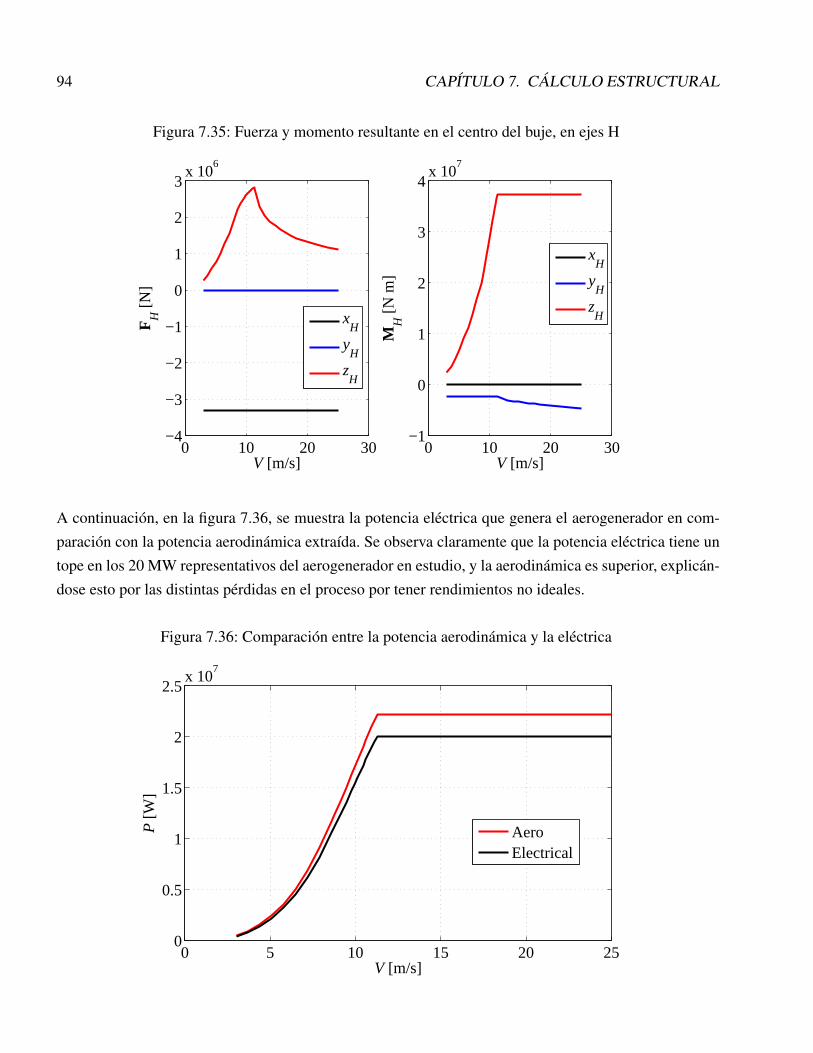
94 CAPÍTULO 7. CÁLCULO ESTRUCTURAL
Figura 7.35: Fuerza y momento resultante en el centro del buje, en ejes H
0 10 20 30−4
−3
−2
−1
0
1
2
3x 10
6
V [m/s]
FH [N
]
xH
yH
zH
0 10 20 30−1
0
1
2
3
4x 10
7
V [m/s]
MH [N
m]
xH
yH
zH
A continuación, en la figura 7.36, se muestra la potencia eléctrica que genera el aerogenerador en com-paración con la potencia aerodinámica extraída. Se observa claramente que la potencia eléctrica tiene untope en los 20 MW representativos del aerogenerador en estudio, y la aerodinámica es superior, explicán-dose esto por las distintas pérdidas en el proceso por tener rendimientos no ideales.
Figura 7.36: Comparación entre la potencia aerodinámica y la eléctrica
0 5 10 15 20 250
0.5
1
1.5
2
2.5x 10
7
V [m/s]
P [
W]
AeroElectrical

7.3. CARGAS SOBRE LA TORRE 95
El peso del rotor se corresponde con la fuerza según xH , tomando un valor de 3.2 MN. La fuerza máximasegún zH alcanza los 2.9 MN. El peso de los componentes de los elementos situados en el interior de lagóndola, más la propia góndola y el buje, ya se estimaron en el capítulo 6. La carga debido a los mismoes de 10.34 MN. El peso propio de la torre es de 30.25 MN.
Una vez conocidas todas las cargas aplicadas sobre la torre, se tiene el valor de solicitación total que debeaguantar la torre, que se calcula según la expresión 7.1.
N = FxH +Wcomponentes +Wtorre (7.1)
Así, se obtiene que la solicitación axial tiene un valor de N = 43,79MN.
Al ser un tipo de generador excepcional, el diámetro de la torre en la base y en su cima se estima extra-polando de aerogeneradores o f f shore existentes, proyectos anteriores e informes como el "Tall towers
for large wind turbines", del instituto danés Vindforsk. Así, dicho informe prevé unos diámetros de 4metros en lo alto y 10 m en la base para aerogeneradores de acero con cimiento de hormigón de 3 MWy 175 metros de altura, mientras que un aerogenerador puntero como el V164 de 8 MW de Vestas, con133 metros de altura, tiene 6.5 metros de diámetro en la base y 4.5 metros a la altura de la góndola, yel Enercon E-126 con una altura similar, cuenta con 14.5 metros de diámetro en la base y 4.1 en lo altode la torre. Con todos estos datos, más los recogidos de proyectos de fin de carrera anteriores, podemosextrapolar y quedarnos con un diámetro en la base de 20 metros y 5 metros en lo alto.
Con los diámetros determinados podemos calcular el espesor de la torre, con la siguiente expresión.
δ =2R175
(7.2)
Aplicándola, obtenemos un espesor en la base de 11 cm y, ascendiendo hasta la góndola, un espesor enlo alto de la torre de 2.86 cm.
Así, en resumen, se determina que la torre cuenta con las siguientes características, que se recuerda sonproducto de extrapolaciones, por lo que se admiten ciertas variaciones:
Cuadro 7.3: Características de la torre
Material AceroAltura 200 m
Diámetro en la base 20 mDiámetro en la cima 5 mEspesor en la base 11 cmEspesor en la cima 2.86 cm
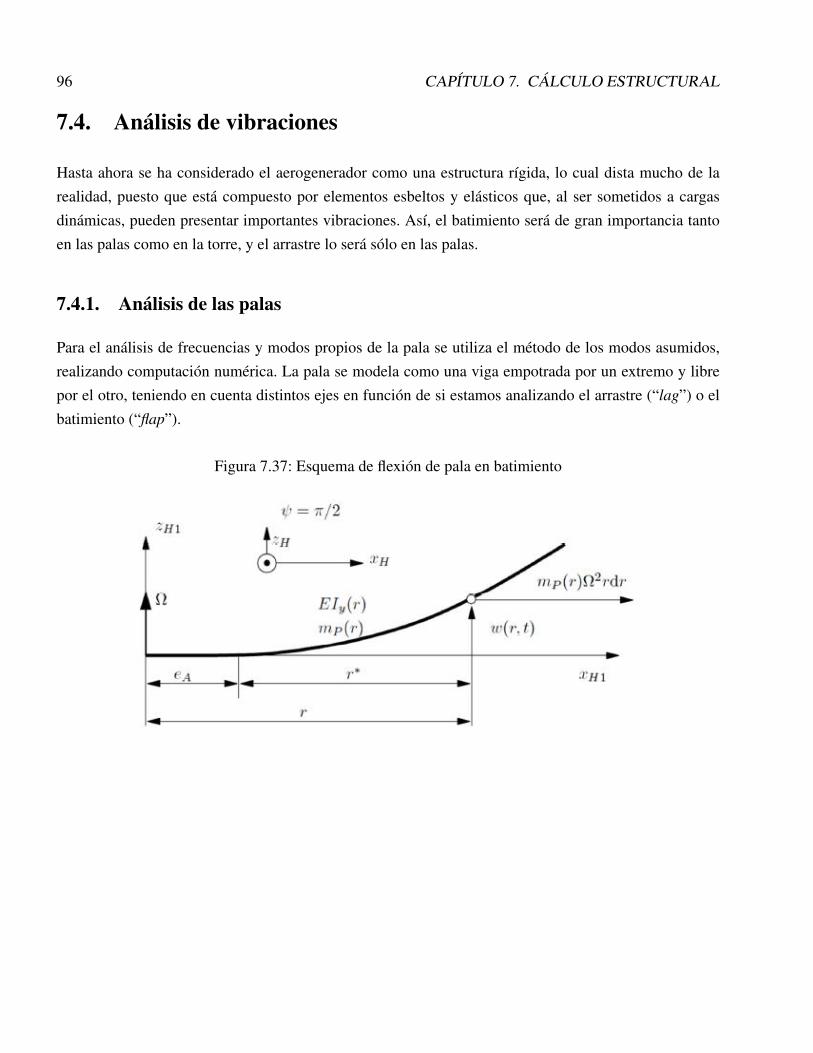
96 CAPÍTULO 7. CÁLCULO ESTRUCTURAL
7.4. Análisis de vibraciones
Hasta ahora se ha considerado el aerogenerador como una estructura rígida, lo cual dista mucho de larealidad, puesto que está compuesto por elementos esbeltos y elásticos que, al ser sometidos a cargasdinámicas, pueden presentar importantes vibraciones. Así, el batimiento será de gran importancia tantoen las palas como en la torre, y el arrastre lo será sólo en las palas.
7.4.1. Análisis de las palas
Para el análisis de frecuencias y modos propios de la pala se utiliza el método de los modos asumidos,realizando computación numérica. La pala se modela como una viga empotrada por un extremo y librepor el otro, teniendo en cuenta distintos ejes en función de si estamos analizando el arrastre (“lag”) o elbatimiento (“flap”).
Figura 7.37: Esquema de flexión de pala en batimiento
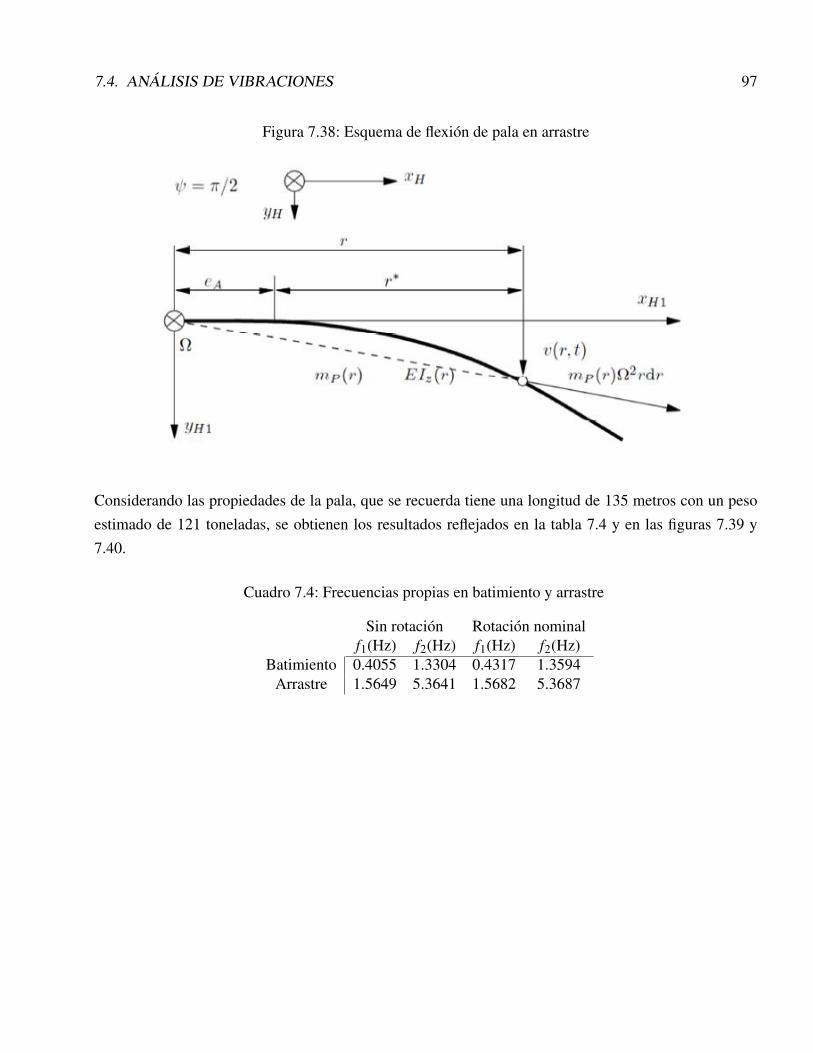
7.4. ANÁLISIS DE VIBRACIONES 97
Figura 7.38: Esquema de flexión de pala en arrastre
Considerando las propiedades de la pala, que se recuerda tiene una longitud de 135 metros con un pesoestimado de 121 toneladas, se obtienen los resultados reflejados en la tabla 7.4 y en las figuras 7.39 y7.40.
Cuadro 7.4: Frecuencias propias en batimiento y arrastre
Sin rotación Rotación nominalf1(Hz) f2(Hz) f1(Hz) f2(Hz)
Batimiento 0.4055 1.3304 0.4317 1.3594Arrastre 1.5649 5.3641 1.5682 5.3687
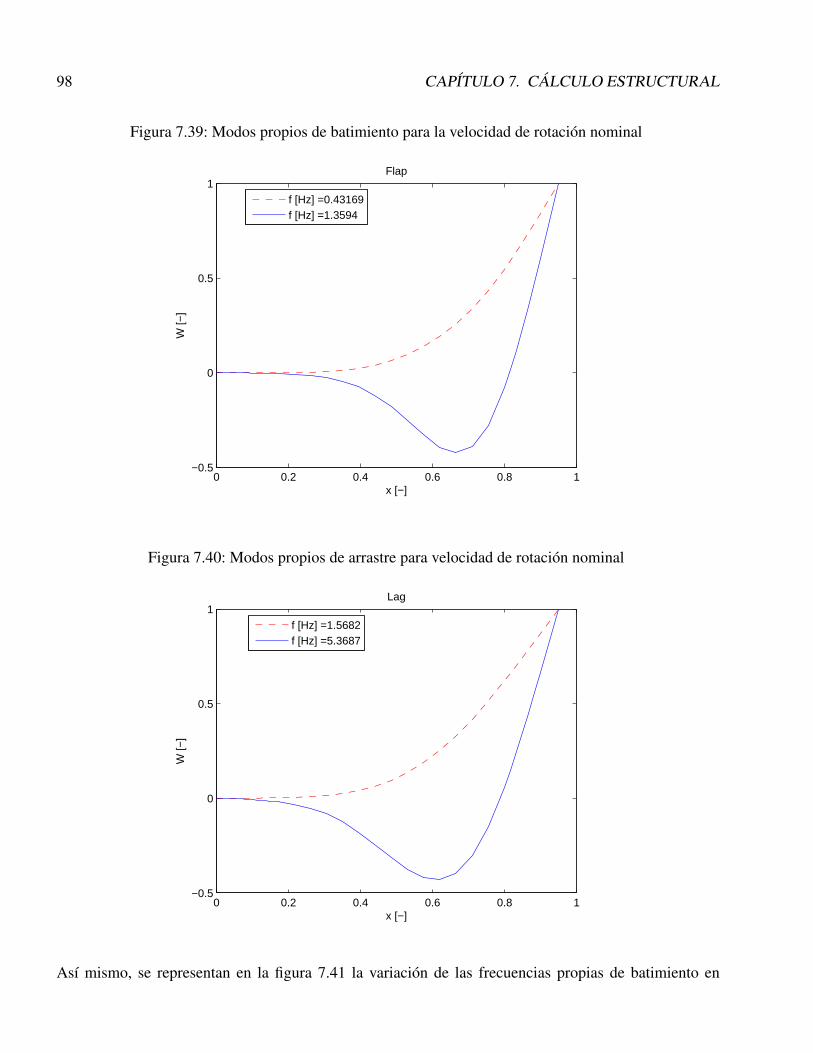
98 CAPÍTULO 7. CÁLCULO ESTRUCTURAL
Figura 7.39: Modos propios de batimiento para la velocidad de rotación nominal
0 0.2 0.4 0.6 0.8 1−0.5
0
0.5
1Flap
x [−]
W [−
]
f [Hz] =0.43169f [Hz] =1.3594
Figura 7.40: Modos propios de arrastre para velocidad de rotación nominal
0 0.2 0.4 0.6 0.8 1−0.5
0
0.5
1Lag
x [−]
W [−
]
f [Hz] =1.5682f [Hz] =5.3687
Así mismo, se representan en la figura 7.41 la variación de las frecuencias propias de batimiento en
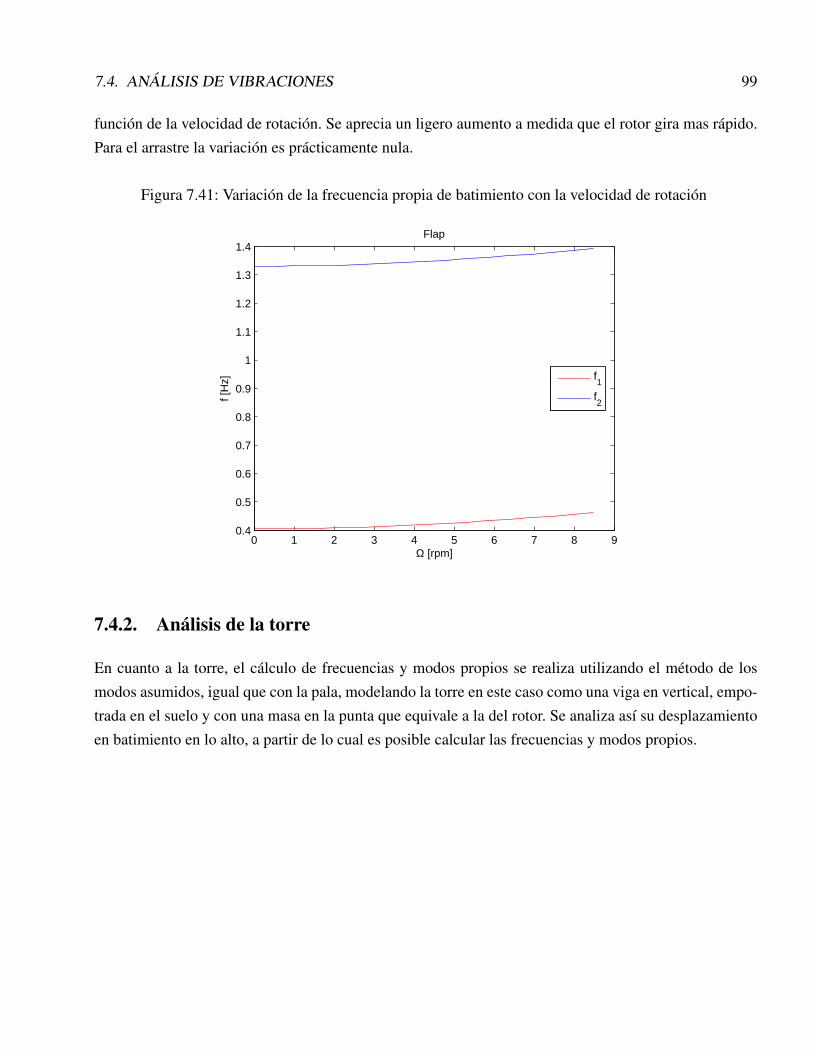
7.4. ANÁLISIS DE VIBRACIONES 99
función de la velocidad de rotación. Se aprecia un ligero aumento a medida que el rotor gira mas rápido.Para el arrastre la variación es prácticamente nula.
Figura 7.41: Variación de la frecuencia propia de batimiento con la velocidad de rotación
0 1 2 3 4 5 6 7 8 90.4
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
1.3
1.4Flap
Ω [rpm]
f [H
z]
f1
f2
7.4.2. Análisis de la torre
En cuanto a la torre, el cálculo de frecuencias y modos propios se realiza utilizando el método de losmodos asumidos, igual que con la pala, modelando la torre en este caso como una viga en vertical, empo-trada en el suelo y con una masa en la punta que equivale a la del rotor. Se analiza así su desplazamientoen batimiento en lo alto, a partir de lo cual es posible calcular las frecuencias y modos propios.
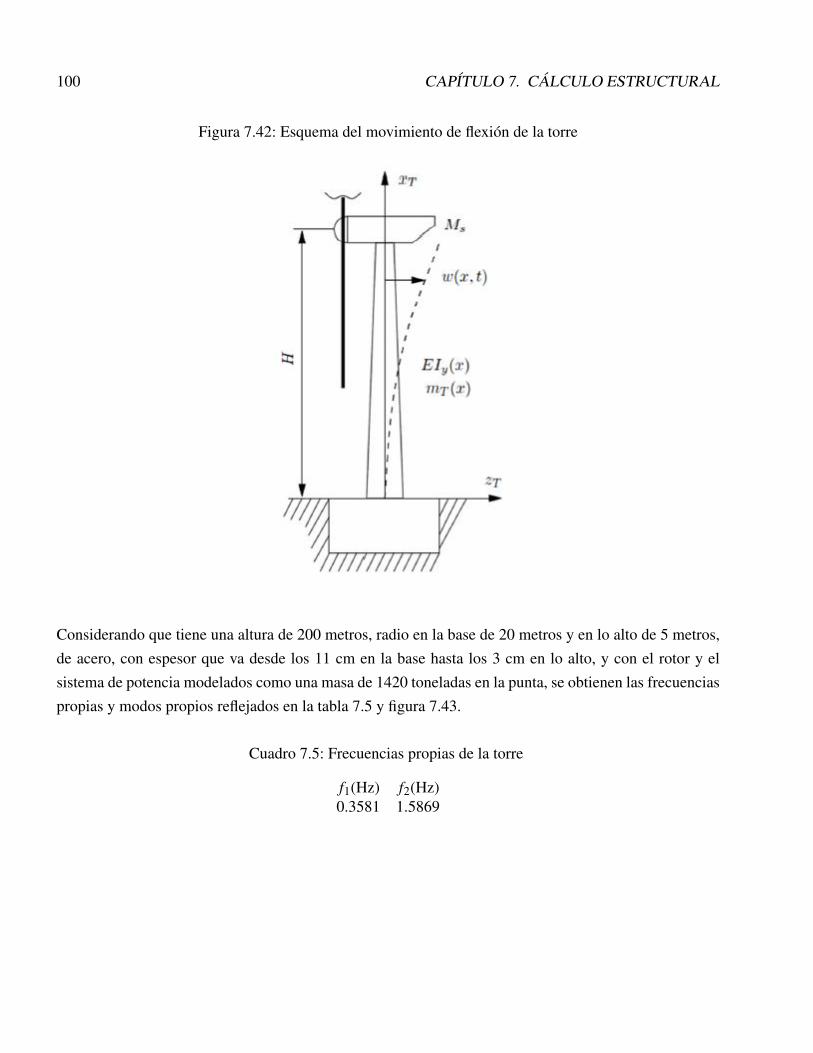
100 CAPÍTULO 7. CÁLCULO ESTRUCTURAL
Figura 7.42: Esquema del movimiento de flexión de la torre
Considerando que tiene una altura de 200 metros, radio en la base de 20 metros y en lo alto de 5 metros,de acero, con espesor que va desde los 11 cm en la base hasta los 3 cm en lo alto, y con el rotor y elsistema de potencia modelados como una masa de 1420 toneladas en la punta, se obtienen las frecuenciaspropias y modos propios reflejados en la tabla 7.5 y figura 7.43.
Cuadro 7.5: Frecuencias propias de la torre
f1(Hz) f2(Hz)0.3581 1.5869
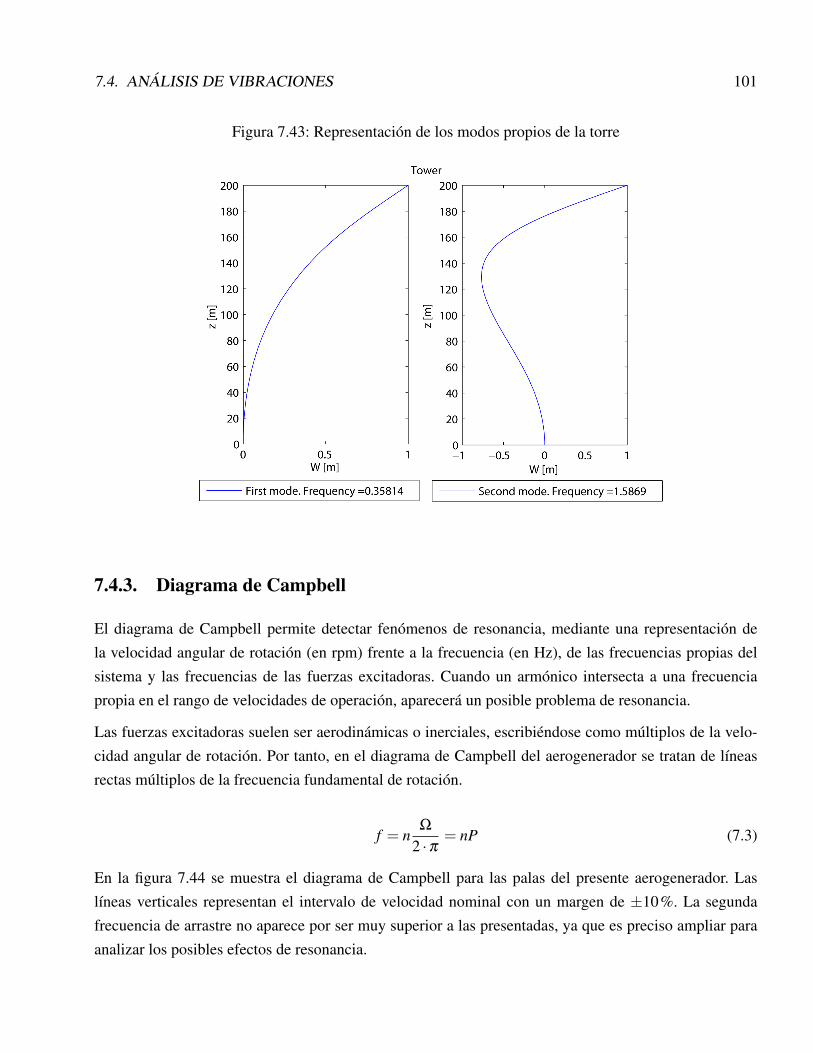
7.4. ANÁLISIS DE VIBRACIONES 101
Figura 7.43: Representación de los modos propios de la torre
7.4.3. Diagrama de Campbell
El diagrama de Campbell permite detectar fenómenos de resonancia, mediante una representación dela velocidad angular de rotación (en rpm) frente a la frecuencia (en Hz), de las frecuencias propias delsistema y las frecuencias de las fuerzas excitadoras. Cuando un armónico intersecta a una frecuenciapropia en el rango de velocidades de operación, aparecerá un posible problema de resonancia.
Las fuerzas excitadoras suelen ser aerodinámicas o inerciales, escribiéndose como múltiplos de la velo-cidad angular de rotación. Por tanto, en el diagrama de Campbell del aerogenerador se tratan de líneasrectas múltiplos de la frecuencia fundamental de rotación.
f = nΩ
2 ·π= nP (7.3)
En la figura 7.44 se muestra el diagrama de Campbell para las palas del presente aerogenerador. Laslíneas verticales representan el intervalo de velocidad nominal con un margen de ±10%. La segundafrecuencia de arrastre no aparece por ser muy superior a las presentadas, ya que es preciso ampliar paraanalizar los posibles efectos de resonancia.
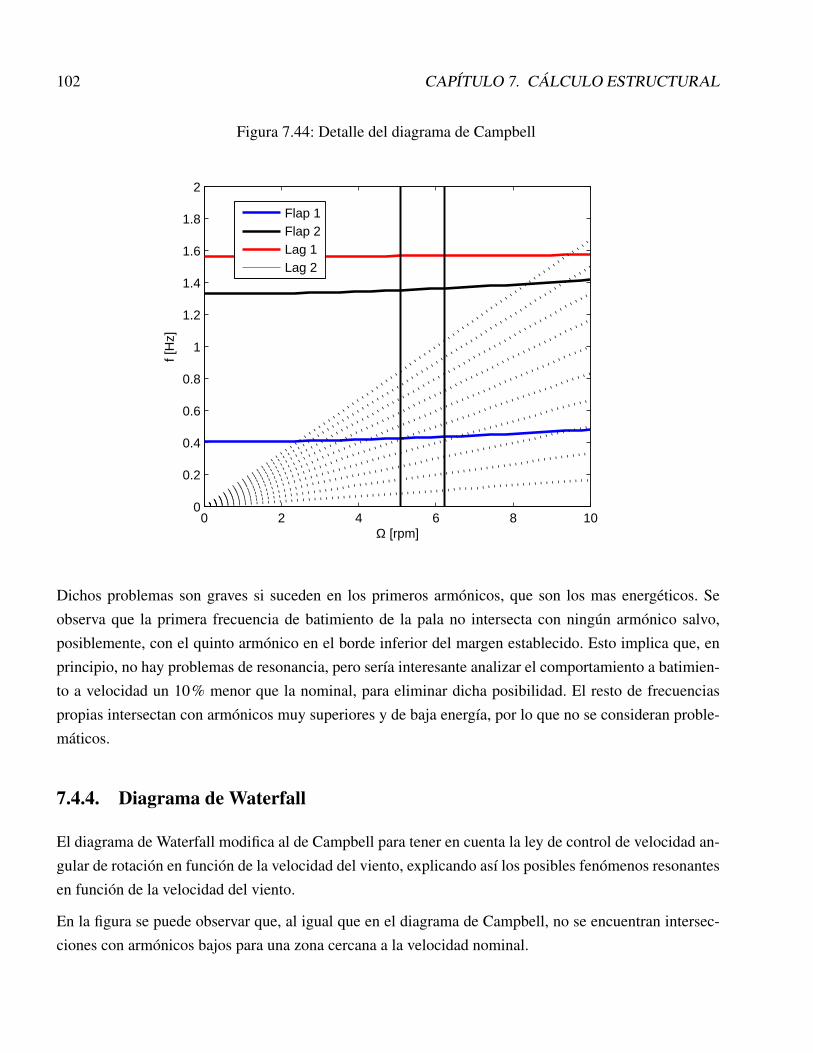
102 CAPÍTULO 7. CÁLCULO ESTRUCTURAL
Figura 7.44: Detalle del diagrama de Campbell
0 2 4 6 8 100
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Ω [rpm]
f [H
z]
Flap 1Flap 2Lag 1Lag 2
Dichos problemas son graves si suceden en los primeros armónicos, que son los mas energéticos. Seobserva que la primera frecuencia de batimiento de la pala no intersecta con ningún armónico salvo,posiblemente, con el quinto armónico en el borde inferior del margen establecido. Esto implica que, enprincipio, no hay problemas de resonancia, pero sería interesante analizar el comportamiento a batimien-to a velocidad un 10% menor que la nominal, para eliminar dicha posibilidad. El resto de frecuenciaspropias intersectan con armónicos muy superiores y de baja energía, por lo que no se consideran proble-máticos.
7.4.4. Diagrama de Waterfall
El diagrama de Waterfall modifica al de Campbell para tener en cuenta la ley de control de velocidad an-gular de rotación en función de la velocidad del viento, explicando así los posibles fenómenos resonantesen función de la velocidad del viento.
En la figura se puede observar que, al igual que en el diagrama de Campbell, no se encuentran intersec-ciones con armónicos bajos para una zona cercana a la velocidad nominal.
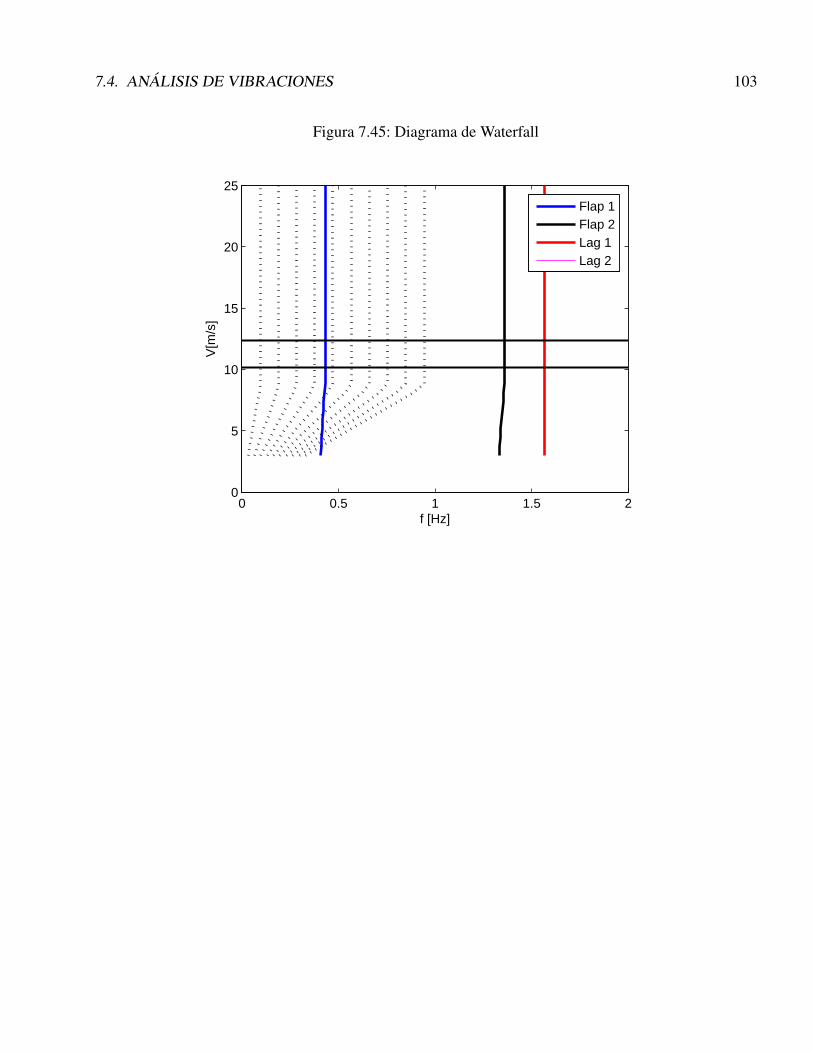
7.4. ANÁLISIS DE VIBRACIONES 103
Figura 7.45: Diagrama de Waterfall
0 0.5 1 1.5 20
5
10
15
20
25
f [Hz]
V[m
/s]
Flap 1Flap 2Lag 1Lag 2

104 CAPÍTULO 7. CÁLCULO ESTRUCTURAL
Capítulo 8
Sistema eléctrico
Así como el rotor transforma la energía cinética del viento en energía mecánica (rotación de las palas),el sistema eléctrico es el encargado de transformar dicha energía mecánica en electricidad. Está com-puesto por varios componentes, entre los que se encuentran el equipamiento eléctrico para distribuciónde corriente, conexión a la red, monitorización de producción y, principalmente, el generador eléctrico,componente sobre el cual se centra el presente capítulo.
8.1. El generador eléctrico
Es el elemento central del sistema eléctrico del aerogenerador, a partir del cual se dimensionan los demáselementos, el sistema de control y el de supervisión.
Mayoritariamente se utilizan generadores de corriente alterna, por la buena relación potencia/peso y lageneración de tensiones más elevadas que los generadores de continua. Sólo se contempla la utilizaciónde generadores de continua en casos de potencia nominal muy baja con almacenamiento de energía enbaterías. El presente informe se centra en el primer tipo, que es el que utilizaría el aerogenerador enestudio.
Existen dos tipos de generadores alternos: los asíncronos (o de inducción) y los síncronos.
8.1.1. Generador síncrono
Tienen frecuencia constante, lo que los hace no aptos para conexión a la red, puesto que tendrían que tenertambién una velocidad de giro constante, que acarrearía esfuerzos mecánicos importantes y oscilacionesen la potencia eléctrica generada. Esto se puede evitar con un convertidor de frecuencia, pero aún asi son
105
106 CAPÍTULO 8. SISTEMA ELÉCTRICO
más utilizados los asíncronos, salvo en máquinas de gran tamaño donde los generadores síncronos deimanes permanentes son la elección lógica.
8.1.2. Generador asíncrono
Son extensamente utilizados por su gran robustez y por su flexibilidad ante fluctuaciones en la velocidaddel viento, debido a que permite variar la velocidad del rotor manteniendo la frecuencia en los bornesconstante. Sin embargo, tienen como inconveniente la necesidad de una corriente de excitación para lamagnetización, lo que implica un consumo de potencia reactiva de la red.
El generador de inducción en operación normal y conectado a la red es robusto y estable. Al aumentarla carga, incrementa el deslizamiento. El problema reside en que el factor de potencia es bajo duranteel consumo de corriente que magnetiza los devanados, por lo que es necesario conectar bancos de con-densadores en paralelo con el generador, y en este caso el generador de inducción no es controlable ytransmite las fluctuaciones a la red. Este problema se puede mejorar utilizando convertidores electrónicos
8.2. Justificación de la elección del generador
La mayoría de los aerogeneradores existentes hoy en dia presentan un sistema de transmisión con cajamultiplicadora. A mayor tamaño de aerogenerador, se tienen velocidades de giro menores, lo que implicauna relación de transmisión mas desfavorable. Por otro lado, las ráfagas de viento provocan fluctuacionesde par en el rotor, que se transmiten a dicha caja multiplicadora, por lo que ha de estar sobredimensionada.Ademas, estas cajas disminuyen el rendimiento del conjunto del aerogenerador y elevan el precio de lagóndola y la torre por el peso que conllevan. Sumando a estas desventajas el desgaste y mantenimientoque precisan, se considera que es mejor prescindir de este elemento en el aerogenerador que se estadiseñando en este proyecto.
Se utilizará un generador directamente acoplado a la turbina, por lo que funcionará a muy baja velocidad,pero variable, desacoplando frecuencia entre generador y red con convertidores electrónicos, y utilizandoimanes permanentes por el mayor rendimiento y menor peso que presentan.
Se elige, por tanto, un generador de imanes permanentes con transmisión directa, por su relativamentebajo peso y mayor eficiencia, debido al bajo paso polar y pequeño entrehierro.
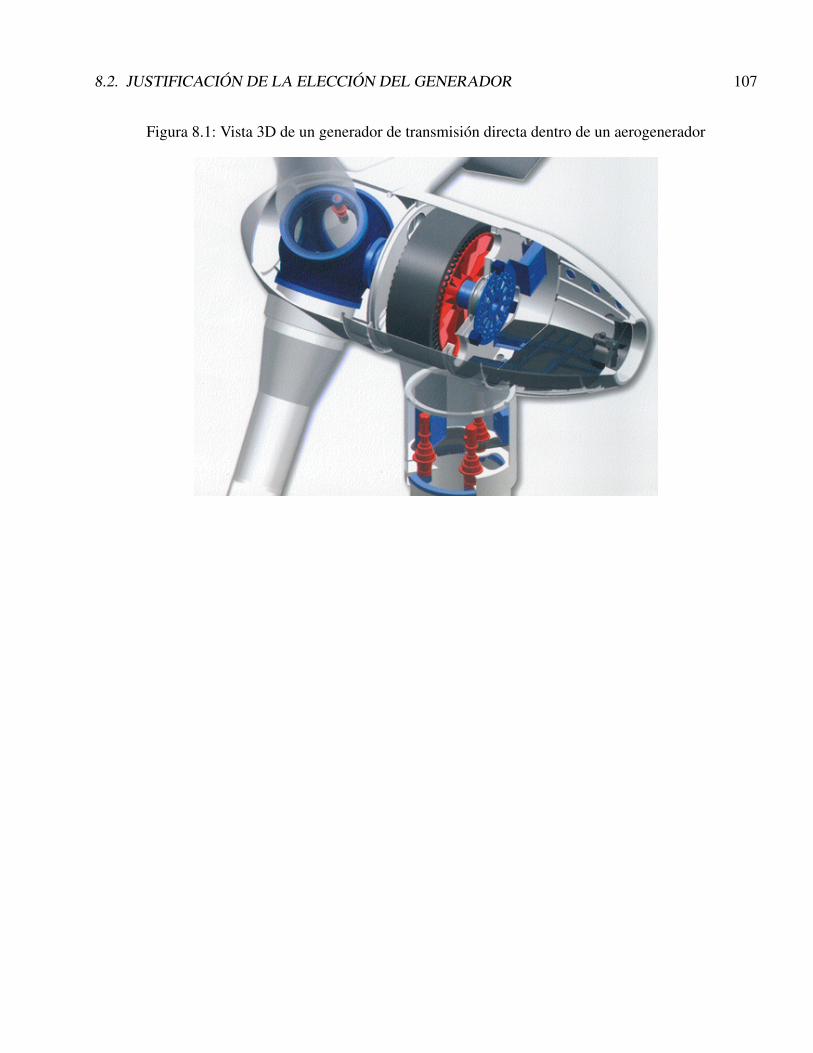
8.2. JUSTIFICACIÓN DE LA ELECCIÓN DEL GENERADOR 107
Figura 8.1: Vista 3D de un generador de transmisión directa dentro de un aerogenerador
108 CAPÍTULO 8. SISTEMA ELÉCTRICO
Capítulo 9
Sistema de regulación y control
El sistema de control de un aerogenerador está compuesto de diversos sensores, actuadores y un conjuntode hardware y software que procesa las señales generadas por los sensores convirtiéndolas en señalesaprovechables por los actuadores.
Algunos ejemplos de sensores típicos en un aerogenerador son: anemómetro, veleta, sensores de veloci-dad rotacional, de ángulo de paso, de vibraciones, de temperatura, etc. En el caso de los actuadores, losmás comunes son el actuador de cambio de ángulo de paso y el motor de orientación.
En el presente capítulo se analizarán los subsistemas más importantes del sistema de control del aeroge-nerador: supervisor, de seguridad, de orientación y de control aerodinámico.
9.1. Sistema supervisor
El supervisor es el encargado de llevar la turbina de un estado operacional a otro, comprobar el estadode los distintos componentes de la máquina y garantizar el funcionamiento del aerogenerador de formaautomática y segura.
Los estados operacionales pueden ser, por ejemplo: stand-by, arranque, producción de potencia, apagadoo parada por fallo, aunque pueden incluirse muchos otros estados en función de las particularidades delaerogenerador y su entorno.
Además de decidir cuándo iniciar el cambio de un estado a otro, el controlador supervisor lleva a cabo lasecuencia de control completa necesaria para ejecutar dicho cambio, comprobando que cada paso se hacompletado exitosamente antes de pasar al siguiente, apagando el aerogenerador si se detectan fallos.
109
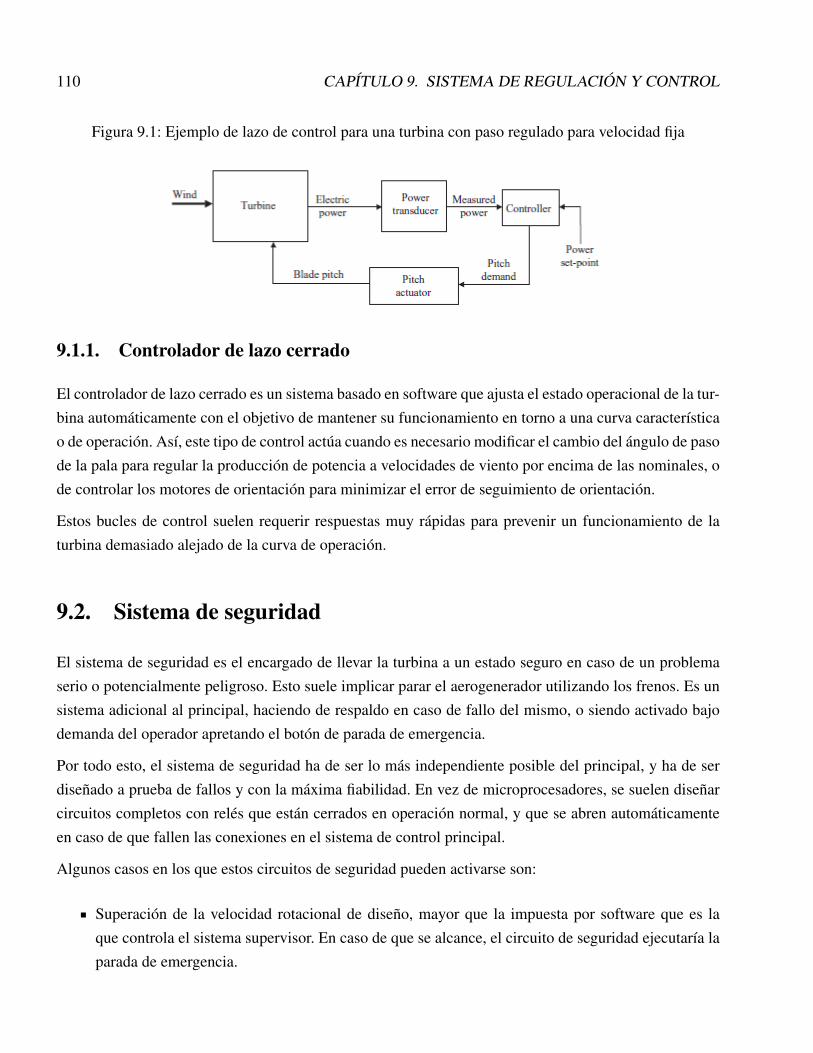
110 CAPÍTULO 9. SISTEMA DE REGULACIÓN Y CONTROL
Figura 9.1: Ejemplo de lazo de control para una turbina con paso regulado para velocidad fija
9.1.1. Controlador de lazo cerrado
El controlador de lazo cerrado es un sistema basado en software que ajusta el estado operacional de la tur-bina automáticamente con el objetivo de mantener su funcionamiento en torno a una curva característicao de operación. Así, este tipo de control actúa cuando es necesario modificar el cambio del ángulo de pasode la pala para regular la producción de potencia a velocidades de viento por encima de las nominales, ode controlar los motores de orientación para minimizar el error de seguimiento de orientación.
Estos bucles de control suelen requerir respuestas muy rápidas para prevenir un funcionamiento de laturbina demasiado alejado de la curva de operación.
9.2. Sistema de seguridad
El sistema de seguridad es el encargado de llevar la turbina a un estado seguro en caso de un problemaserio o potencialmente peligroso. Esto suele implicar parar el aerogenerador utilizando los frenos. Es unsistema adicional al principal, haciendo de respaldo en caso de fallo del mismo, o siendo activado bajodemanda del operador apretando el botón de parada de emergencia.
Por todo esto, el sistema de seguridad ha de ser lo más independiente posible del principal, y ha de serdiseñado a prueba de fallos y con la máxima fiabilidad. En vez de microprocesadores, se suelen diseñarcircuitos completos con relés que están cerrados en operación normal, y que se abren automáticamenteen caso de que fallen las conexiones en el sistema de control principal.
Algunos casos en los que estos circuitos de seguridad pueden activarse son:
Superación de la velocidad rotacional de diseño, mayor que la impuesta por software que es laque controla el sistema supervisor. En caso de que se alcance, el circuito de seguridad ejecutaría laparada de emergencia.
9.3. SISTEMA DE ORIENTACIÓN 111
Superación de los límites de vibración. El relé correspondiente se activaría ante un fallo en origende este sensor, lo que podría indicar un fallo estructural grave.
Parada de emergencia por pulsación de botón (decisión humana).
9.3. Sistema de orientación
Normalmente, los aerogeneradores son naturalmente estables en orientación, lo que significa que si haylibertad de movimiento en este eje, la turbina tiende a orientarse hacia el viento, pero esto no es siempreasí. El sistema de orientación se encarga de corregir estas posibles diferencias orientando la góndolapara que la velocidad del viento sea siempre normal al plano de giro del rotor, y así poder aprovechar almáximo la energía cinética del viento.
Para su funcionamiento, se comparan los datos provenientes de la veleta con el ángulo de giro de lagóndola, ejecutando o no la corrección en función de la diferencia entre ambos valores. Es importante queeste sistema no actúe con velocidad elevada, porque de lo contrario se podrían producir pares giroscópicosque reducirían la vida útil de los componentes mecánicos de este sistema.
9.4. Sistema aerodinámico de control
La función del sistema aerodinámico de control es limitar las fuerzas aerodinámicas y el par transmitido.Así, se limitan los esfuerzos que sufren los elementos del sistema.
En el aerogenerador en estudio, el tipo de control es por cambio de paso y velocidad variable. Éste actúacuando la velocidad incidente supera el valor de la velocidad nominal, aumentando el ángulo de pasopara que el ángulo de ataque de cada sección de pala disminuya, lo que implica una disminución delcoeficiente de sustentación y, a su vez, el mantenimiento de un valor constante de extracción de potenciaaerodinámica.

112 CAPÍTULO 9. SISTEMA DE REGULACIÓN Y CONTROL
Capítulo 10
Estimación de costes
El objetivo de este capítulo es estimar el coste del aerogenerador que se ha estudiado. Para ello, seutilizará el informe del NREL que se empleó para la estimación de masas, "Wind Turbine Design Cost
and Scaling Model".
El enorme tamaño del aerogenerador diseñado hace prácticamente inviable su instalación en tierra. De-bido a esto, se analizarán también los costes derivados de una hipotética instalación offshore.
Primero, se definirán los conceptos más utilizados en el lenguaje económico empleado en el estudio deaerogeneradores; posteriormente, se explica el proceso seguido para actualizar los precios acorde conla inflación y las tasas de cambio; después, se calcularán los costes asociados a la fabricación de loscomponentes, construcción y otros gastos, tanto numérica como gráficamente; finalmente, se analizarácríticamente la viabilidad económica y la fiabilidad del presente estudio de costes.
10.1. Definiciones
A continuación se definen varios parámetros de vital importancia a la hora de referirse a estimaciones decostes en un proyecto ingenieril.
COE Coste de la energía, del inglés Cost Of Energy. Es un índice que refleja el coste total de la energíagenerada a lo largo de la vida de un proyecto, y se mide en divisa/kWh (en el caso que nos concier-ne, la divisa es el Euro). Su cálculo se realiza según la expresión 10.1, cuyas variables se definenposteriormente.
COE = ICCFCRAEP
+AOE (10.1)
113
114 CAPÍTULO 10. ESTIMACIÓN DE COSTES
FCR Tasa de cargo fija, del inglés Fixed Charge Rate. Representa la cantidad anual por euro de coste fijonecesaria para cubrir distintos costes. Según el modelo de NREL, estos costes son: financiación dela construcción, tasas de financiación, rendimiento de la deuda y del capital común, depreciación,impuesto sobre la renta, impuestos de propiedad y seguros. Se fija en 0.1158 por año.
ICC Coste de capital inicial, del inglés Initial Capital Cost. Su valor es la suma del coste del sistema delaerogenerador más el coste del balance de la estación. Estos costes no incluyen la financiación dela construcción o sus tasas, que se incluyen dentro del FCR.
AEP Producción anual de energía, del inglés Net Anual Energy Production. Se mide en kWh/año, y sedefine como el producto de las horas equivalentes por la potencia nominal. En el aerogenerador enestudio es de 6,5665·107kWh/año.
AOE Gastos anuales de operación, del inglés Annual Operating Expenses. Incluye el coste de arrenda-miento del terreno, el coste medio de operaciones y mantenimiento y el coste medio de reemplazoy sustitución. Se calcula según la expresión 10.2, cuyas variables se definen posteriormente.
AOE =LLC+O&M+LRC
AEP(10.2)
LLC Coste de arrendamiento del terreno, del inglés Land Lease Cost. Se expresa en C/año.
O&M Coste medio de operaciones, del inglés Levelized Operations & Maintenance Cost.Se expresa enC/año. Es el componente del AOE más significativo, incluyendo mano de obra, piezas y recambiospara mantenimiento y mano de obra de administración y apoyo.
LRC Coste medio de sustitución o reemplazo, del inglés Levelized Replacement/Overhaul Cost.Se ex-presa en C/año. Distribuye el coste de los principales recambios y sustituciones a lo largo de lavida del aerogenerador.
10.2. Aplicación de la inflación y tasas de cambio
El modelo desarrollado por el NREL estima los costes en dólares estadounidenses de septiembre de2002. Obviamente, emplear el mismo modelo llevaría a grandes errores, por lo que es necesario estudiarla inflación del dólar estadounidense y los tipos de cambio frente al euro para entender los costes conprecios actualizados.
Para adaptar el modelo, se han seguido los siguientes pasos:
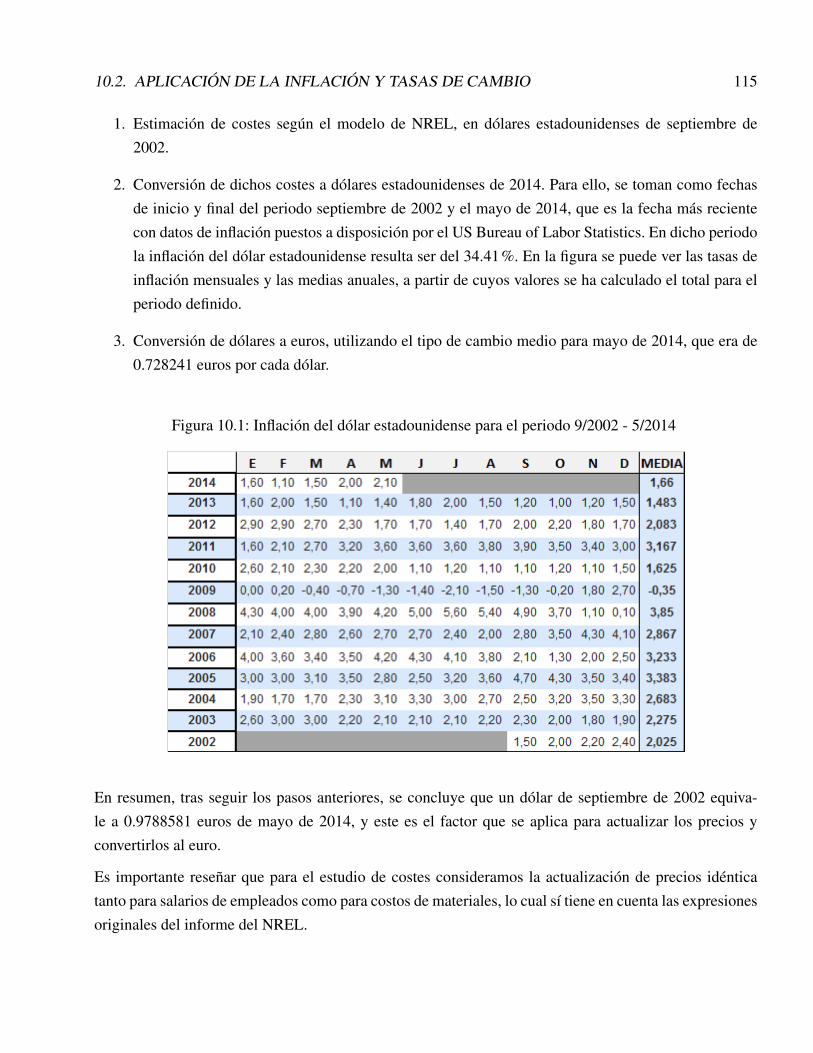
10.2. APLICACIÓN DE LA INFLACIÓN Y TASAS DE CAMBIO 115
1. Estimación de costes según el modelo de NREL, en dólares estadounidenses de septiembre de2002.
2. Conversión de dichos costes a dólares estadounidenses de 2014. Para ello, se toman como fechasde inicio y final del periodo septiembre de 2002 y el mayo de 2014, que es la fecha más recientecon datos de inflación puestos a disposición por el US Bureau of Labor Statistics. En dicho periodola inflación del dólar estadounidense resulta ser del 34.41%. En la figura se puede ver las tasas deinflación mensuales y las medias anuales, a partir de cuyos valores se ha calculado el total para elperiodo definido.
3. Conversión de dólares a euros, utilizando el tipo de cambio medio para mayo de 2014, que era de0.728241 euros por cada dólar.
Figura 10.1: Inflación del dólar estadounidense para el periodo 9/2002 - 5/2014
En resumen, tras seguir los pasos anteriores, se concluye que un dólar de septiembre de 2002 equiva-le a 0.9788581 euros de mayo de 2014, y este es el factor que se aplica para actualizar los precios yconvertirlos al euro.
Es importante reseñar que para el estudio de costes consideramos la actualización de precios idénticatanto para salarios de empleados como para costos de materiales, lo cual sí tiene en cuenta las expresionesoriginales del informe del NREL.
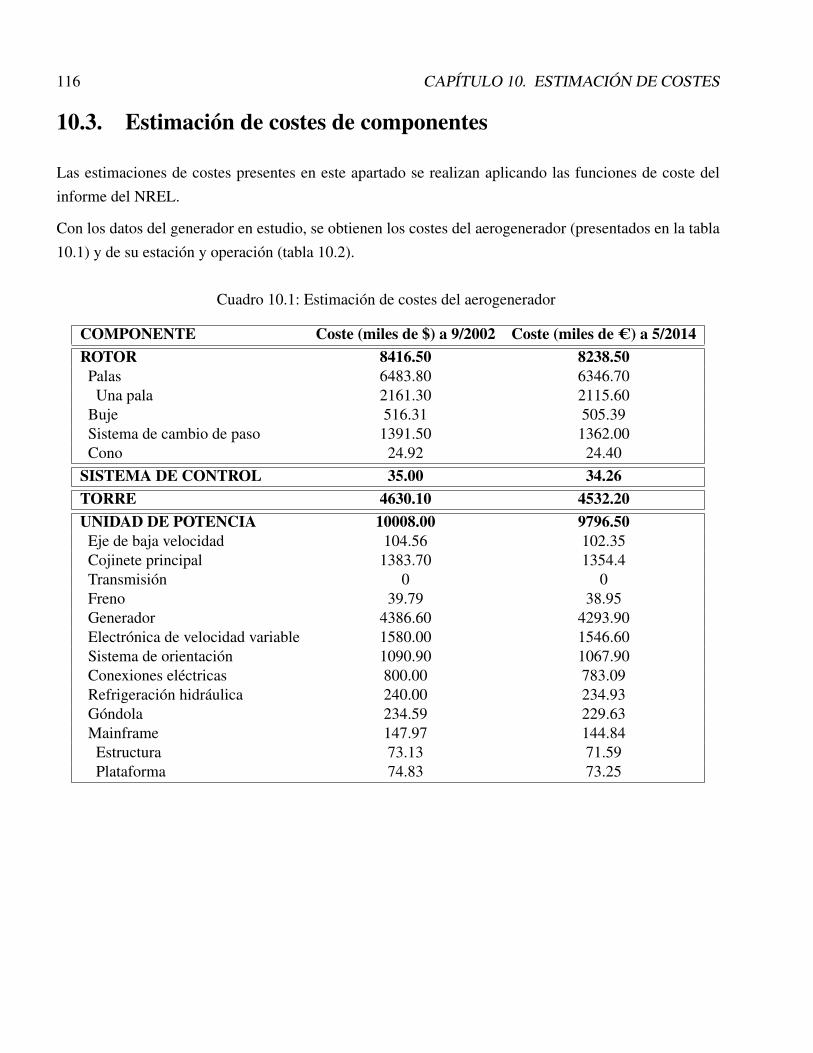
116 CAPÍTULO 10. ESTIMACIÓN DE COSTES
10.3. Estimación de costes de componentes
Las estimaciones de costes presentes en este apartado se realizan aplicando las funciones de coste delinforme del NREL.
Con los datos del generador en estudio, se obtienen los costes del aerogenerador (presentados en la tabla10.1) y de su estación y operación (tabla 10.2).
Cuadro 10.1: Estimación de costes del aerogenerador
COMPONENTE Coste (miles de $) a 9/2002 Coste (miles de C) a 5/2014ROTOR 8416.50 8238.50
Palas 6483.80 6346.70Una pala 2161.30 2115.60
Buje 516.31 505.39Sistema de cambio de paso 1391.50 1362.00Cono 24.92 24.40
SISTEMA DE CONTROL 35.00 34.26TORRE 4630.10 4532.20UNIDAD DE POTENCIA 10008.00 9796.50
Eje de baja velocidad 104.56 102.35Cojinete principal 1383.70 1354.4Transmisión 0 0Freno 39.79 38.95Generador 4386.60 4293.90Electrónica de velocidad variable 1580.00 1546.60Sistema de orientación 1090.90 1067.90Conexiones eléctricas 800.00 783.09Refrigeración hidráulica 240.00 234.93Góndola 234.59 229.63Mainframe 147.97 144.84Estructura 73.13 71.59Plataforma 74.83 73.25
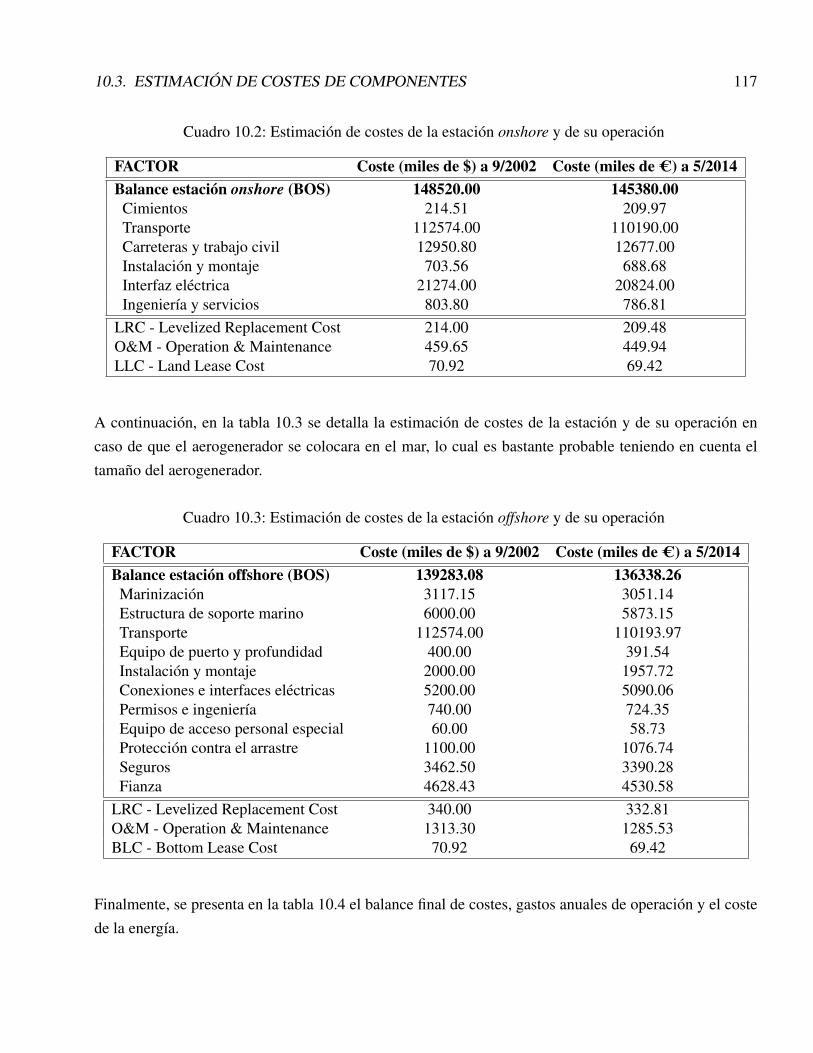
10.3. ESTIMACIÓN DE COSTES DE COMPONENTES 117
Cuadro 10.2: Estimación de costes de la estación onshore y de su operación
FACTOR Coste (miles de $) a 9/2002 Coste (miles de C) a 5/2014Balance estación onshore (BOS) 148520.00 145380.00
Cimientos 214.51 209.97Transporte 112574.00 110190.00Carreteras y trabajo civil 12950.80 12677.00Instalación y montaje 703.56 688.68Interfaz eléctrica 21274.00 20824.00Ingeniería y servicios 803.80 786.81
LRC - Levelized Replacement Cost 214.00 209.48O&M - Operation & Maintenance 459.65 449.94LLC - Land Lease Cost 70.92 69.42
A continuación, en la tabla 10.3 se detalla la estimación de costes de la estación y de su operación encaso de que el aerogenerador se colocara en el mar, lo cual es bastante probable teniendo en cuenta eltamaño del aerogenerador.
Cuadro 10.3: Estimación de costes de la estación offshore y de su operación
FACTOR Coste (miles de $) a 9/2002 Coste (miles de C) a 5/2014Balance estación offshore (BOS) 139283.08 136338.26Marinización 3117.15 3051.14Estructura de soporte marino 6000.00 5873.15Transporte 112574.00 110193.97Equipo de puerto y profundidad 400.00 391.54Instalación y montaje 2000.00 1957.72Conexiones e interfaces eléctricas 5200.00 5090.06Permisos e ingeniería 740.00 724.35Equipo de acceso personal especial 60.00 58.73Protección contra el arrastre 1100.00 1076.74Seguros 3462.50 3390.28Fianza 4628.43 4530.58
LRC - Levelized Replacement Cost 340.00 332.81O&M - Operation & Maintenance 1313.30 1285.53BLC - Bottom Lease Cost 70.92 69.42
Finalmente, se presenta en la tabla 10.4 el balance final de costes, gastos anuales de operación y el costede la energía.
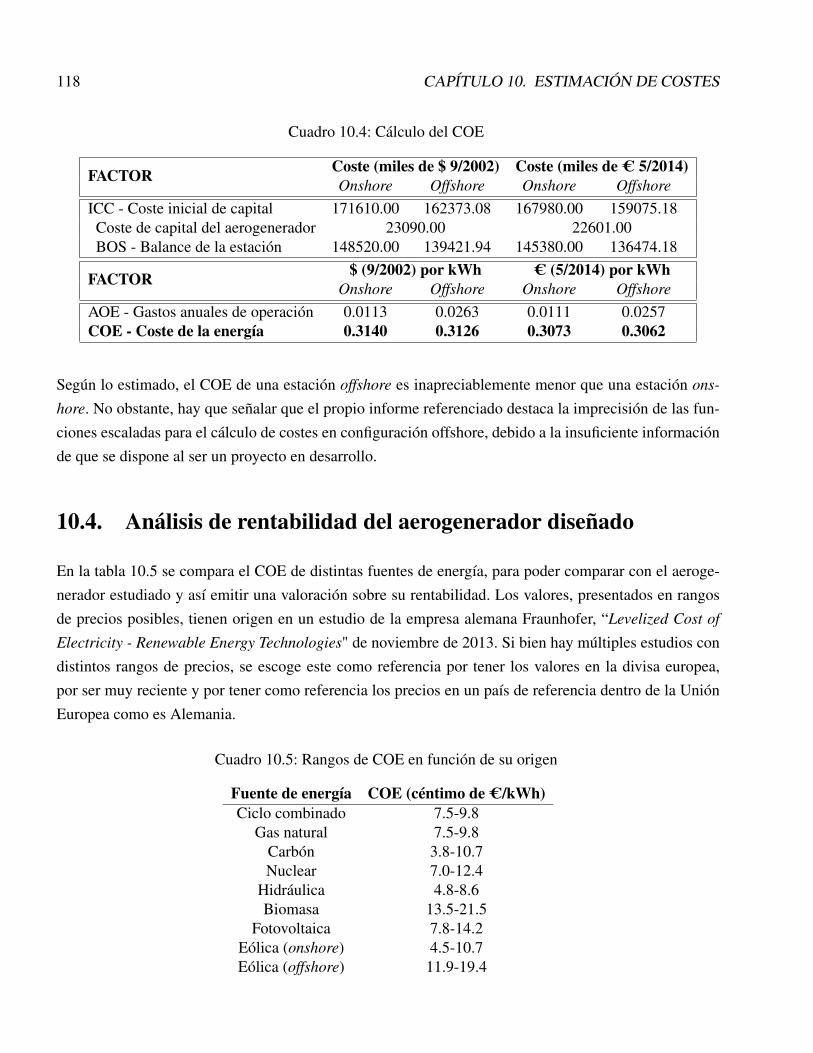
118 CAPÍTULO 10. ESTIMACIÓN DE COSTES
Cuadro 10.4: Cálculo del COE
FACTOR Coste (miles de $ 9/2002) Coste (miles de C 5/2014)Onshore Offshore Onshore Offshore
ICC - Coste inicial de capital 171610.00 162373.08 167980.00 159075.18Coste de capital del aerogenerador 23090.00 22601.00BOS - Balance de la estación 148520.00 139421.94 145380.00 136474.18
FACTOR $ (9/2002) por kWh C (5/2014) por kWhOnshore Offshore Onshore Offshore
AOE - Gastos anuales de operación 0.0113 0.0263 0.0111 0.0257COE - Coste de la energía 0.3140 0.3126 0.3073 0.3062
Según lo estimado, el COE de una estación offshore es inapreciablemente menor que una estación ons-
hore. No obstante, hay que señalar que el propio informe referenciado destaca la imprecisión de las fun-ciones escaladas para el cálculo de costes en configuración offshore, debido a la insuficiente informaciónde que se dispone al ser un proyecto en desarrollo.
10.4. Análisis de rentabilidad del aerogenerador diseñado
En la tabla 10.5 se compara el COE de distintas fuentes de energía, para poder comparar con el aeroge-nerador estudiado y así emitir una valoración sobre su rentabilidad. Los valores, presentados en rangosde precios posibles, tienen origen en un estudio de la empresa alemana Fraunhofer, “Levelized Cost of
Electricity - Renewable Energy Technologies" de noviembre de 2013. Si bien hay múltiples estudios condistintos rangos de precios, se escoge este como referencia por tener los valores en la divisa europea,por ser muy reciente y por tener como referencia los precios en un país de referencia dentro de la UniónEuropea como es Alemania.
Cuadro 10.5: Rangos de COE en función de su origen
Fuente de energía COE (céntimo de C/kWh)Ciclo combinado 7.5-9.8
Gas natural 7.5-9.8Carbón 3.8-10.7Nuclear 7.0-12.4
Hidráulica 4.8-8.6Biomasa 13.5-21.5
Fotovoltaica 7.8-14.2Eólica (onshore) 4.5-10.7Eólica (offshore) 11.9-19.4
10.4. ANÁLISIS DE RENTABILIDAD DEL AEROGENERADOR DISEÑADO 119
El COE estimado para el aerogenerador diseñado es de 30.62 y 31.26 céntimos de euro por kWh, paraconfiguración offshore y onshore respectivamente. Estos valores son sustancialmente más altos que losreales según el estudio de Fraunhofer, en concreto un 200% superior para onshore y un 50% superiorpara offshore. Esto significa que, a primera estimación, el aerogenerador no es viable comercialmente.
A medio plazo, sería interesante investigar para verificar que las funciones de estimación son adecuadas,ya que el informe del NREL se basa en aerogeneradores de tamaño pequeño, y las extrapolaciones decostos para sistemas offshore tienen un gran margen de error.

120 CAPÍTULO 10. ESTIMACIÓN DE COSTES
Capítulo 11
Estudio adicional: rotor de baja inducción
En el marco del diseño de grandes rotores de eje horizontal, como el caso que se estudia en el presenteproyecto, se está analizando la viabilidad de alterar la geometría óptima de las palas que conducen a uncoeficiente de potencia máximo, compensando la pérdida de producción de energía aumentando el radiodel rotor. Si se consigue mediante este método que el aumento de la captación de energía al aumentar elradio sea superior a la pérdida de energía por disminución del CPmax, se considera exitoso. Es necesarioanalizar las acciones estructurales, así como el coste, para poder determinar si la solución es factible.
Los primeros desarrollos sobre este tipo de concepto analizan el efecto de reducir la cuerda de la pala,aumentar su radio, y explorar su efecto en la producción energética anual, para una acción estructuralcaracterística como es el momento flector en la raíz de la pala en la dirección de batimiento. Uno de losresultados de este tipo de estrategia para abarcar el problema es que los rotores deben presentar valoresdel coeficiente de velocidad inducida axial menores, de ahí la denominación de rotores de baja inducción.
11.1. Diseño de la pala de referencia
Para estudiar el concepto, se diseña un rotor de referencia, diferente del estudiado en el presente proyectopero calculado con el mismo método. El resumen de características se muestra en la tabla 11.1. La palatendrá el mismo perfil a lo largo de toda su longitud.
La pala se calcula de la misma forma que se hizo para el aerogenerador en estudio, creando una palamadre con todos los perfiles para un número de tramos a elección personal (se escoge tener 15 tramos),y calculando así sus distribuciones de torsión geométrica y cuerda adimensional. Analizando los radiospara potencia especifica máxima y mínima, se concluiría que el radio estaría en torno a 55 metros. Sepodría elegir un radior mayor para destacar cómo afectaría el análisis a máquinas de gran tamaño, perolos resultados gráficos son similares, por lo que se decide seguir adelante con el rotor de coste optimizado.
121
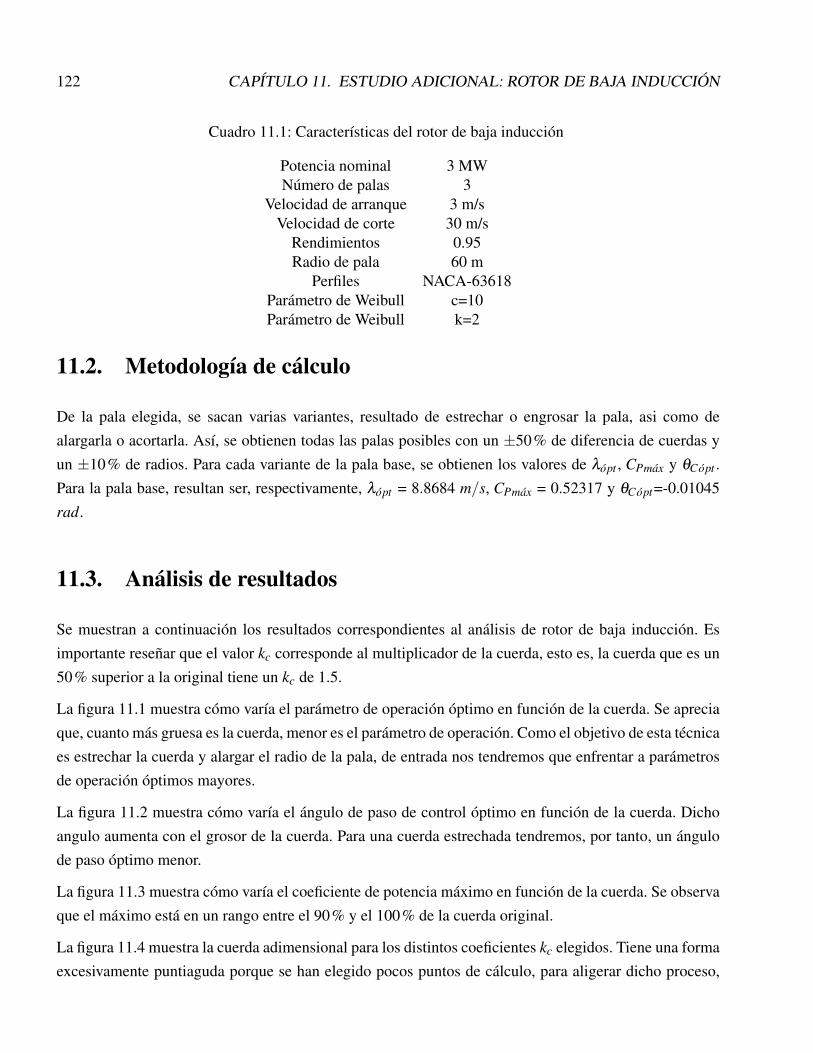
122 CAPÍTULO 11. ESTUDIO ADICIONAL: ROTOR DE BAJA INDUCCIÓN
Cuadro 11.1: Características del rotor de baja inducción
Potencia nominal 3 MWNúmero de palas 3
Velocidad de arranque 3 m/sVelocidad de corte 30 m/s
Rendimientos 0.95Radio de pala 60 m
Perfiles NACA-63618Parámetro de Weibull c=10Parámetro de Weibull k=2
11.2. Metodología de cálculo
De la pala elegida, se sacan varias variantes, resultado de estrechar o engrosar la pala, asi como dealargarla o acortarla. Así, se obtienen todas las palas posibles con un ±50% de diferencia de cuerdas yun ±10% de radios. Para cada variante de la pala base, se obtienen los valores de λopt , CPmax y θCopt .Para la pala base, resultan ser, respectivamente, λopt = 8.8684 m/s, CPmax = 0.52317 y θCopt=-0.01045rad.
11.3. Análisis de resultados
Se muestran a continuación los resultados correspondientes al análisis de rotor de baja inducción. Esimportante reseñar que el valor kc corresponde al multiplicador de la cuerda, esto es, la cuerda que es un50% superior a la original tiene un kc de 1.5.
La figura 11.1 muestra cómo varía el parámetro de operación óptimo en función de la cuerda. Se apreciaque, cuanto más gruesa es la cuerda, menor es el parámetro de operación. Como el objetivo de esta técnicaes estrechar la cuerda y alargar el radio de la pala, de entrada nos tendremos que enfrentar a parámetrosde operación óptimos mayores.
La figura 11.2 muestra cómo varía el ángulo de paso de control óptimo en función de la cuerda. Dichoangulo aumenta con el grosor de la cuerda. Para una cuerda estrechada tendremos, por tanto, un ángulode paso óptimo menor.
La figura 11.3 muestra cómo varía el coeficiente de potencia máximo en función de la cuerda. Se observaque el máximo está en un rango entre el 90% y el 100% de la cuerda original.
La figura 11.4 muestra la cuerda adimensional para los distintos coeficientes kc elegidos. Tiene una formaexcesivamente puntiaguda porque se han elegido pocos puntos de cálculo, para aligerar dicho proceso,
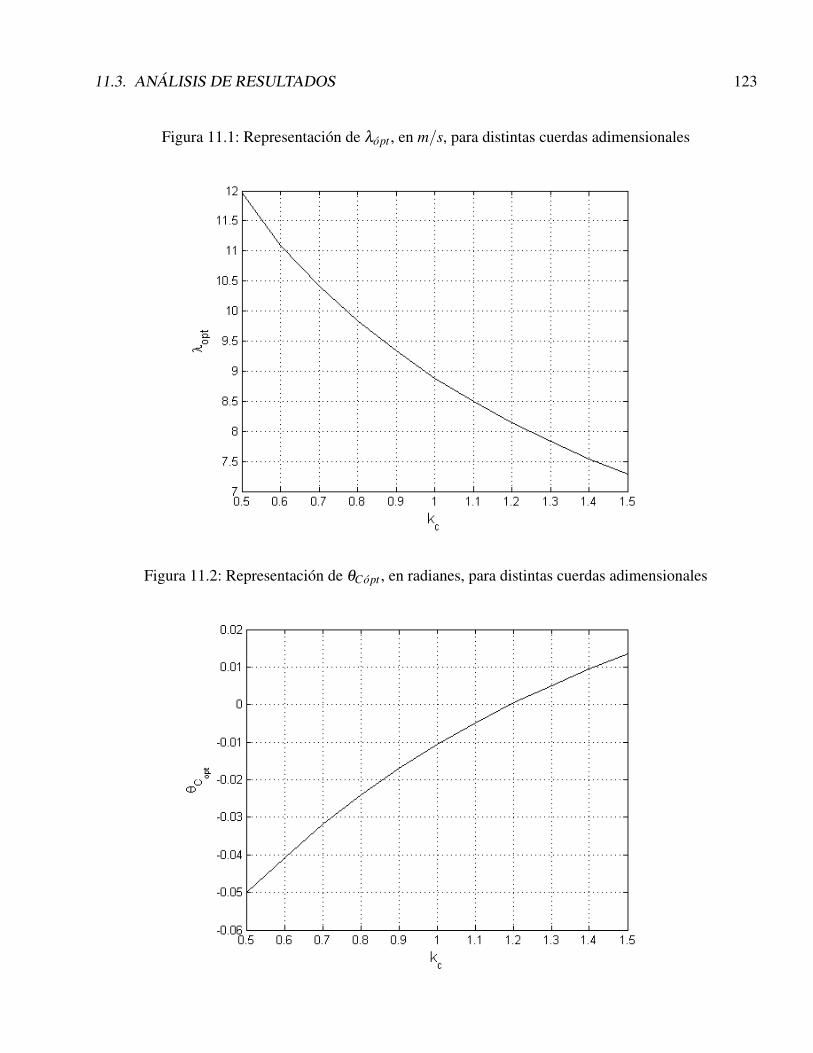
11.3. ANÁLISIS DE RESULTADOS 123
Figura 11.1: Representación de λopt , en m/s, para distintas cuerdas adimensionales
Figura 11.2: Representación de θCopt , en radianes, para distintas cuerdas adimensionales
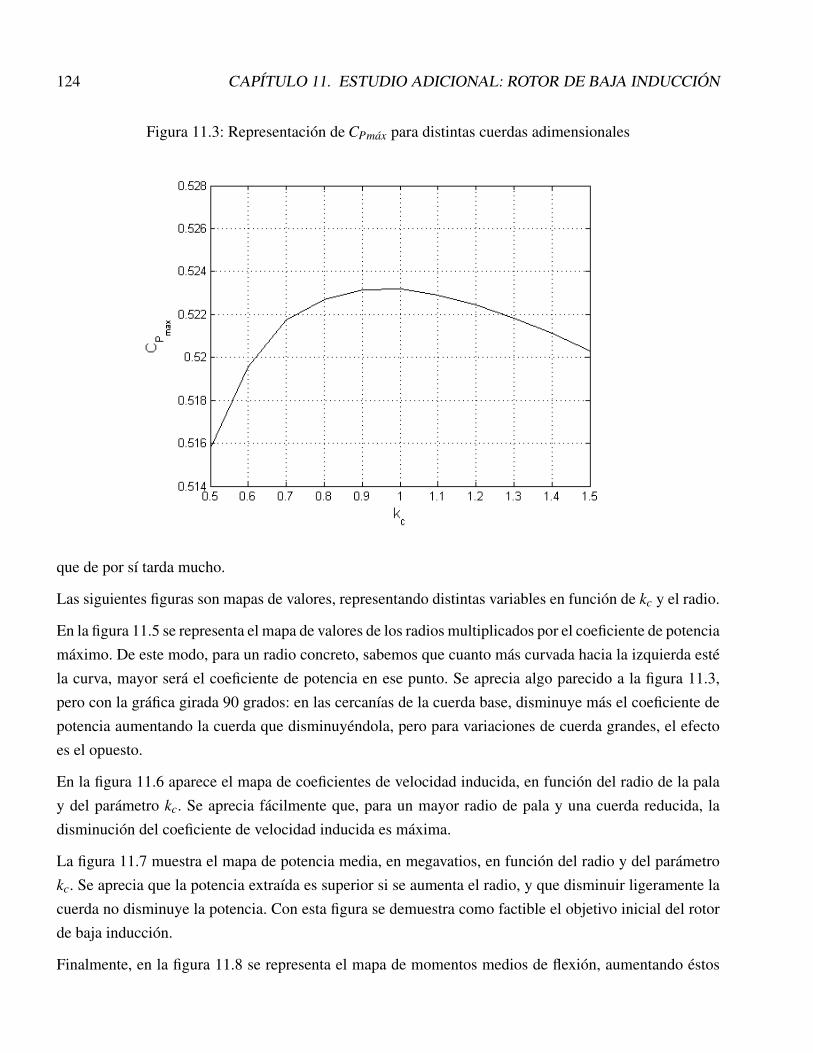
124 CAPÍTULO 11. ESTUDIO ADICIONAL: ROTOR DE BAJA INDUCCIÓN
Figura 11.3: Representación de CPmax para distintas cuerdas adimensionales
que de por sí tarda mucho.
Las siguientes figuras son mapas de valores, representando distintas variables en función de kc y el radio.
En la figura 11.5 se representa el mapa de valores de los radios multiplicados por el coeficiente de potenciamáximo. De este modo, para un radio concreto, sabemos que cuanto más curvada hacia la izquierda estéla curva, mayor será el coeficiente de potencia en ese punto. Se aprecia algo parecido a la figura 11.3,pero con la gráfica girada 90 grados: en las cercanías de la cuerda base, disminuye más el coeficiente depotencia aumentando la cuerda que disminuyéndola, pero para variaciones de cuerda grandes, el efectoes el opuesto.
En la figura 11.6 aparece el mapa de coeficientes de velocidad inducida, en función del radio de la palay del parámetro kc. Se aprecia fácilmente que, para un mayor radio de pala y una cuerda reducida, ladisminución del coeficiente de velocidad inducida es máxima.
La figura 11.7 muestra el mapa de potencia media, en megavatios, en función del radio y del parámetrokc. Se aprecia que la potencia extraída es superior si se aumenta el radio, y que disminuir ligeramente lacuerda no disminuye la potencia. Con esta figura se demuestra como factible el objetivo inicial del rotorde baja inducción.
Finalmente, en la figura 11.8 se representa el mapa de momentos medios de flexión, aumentando éstos
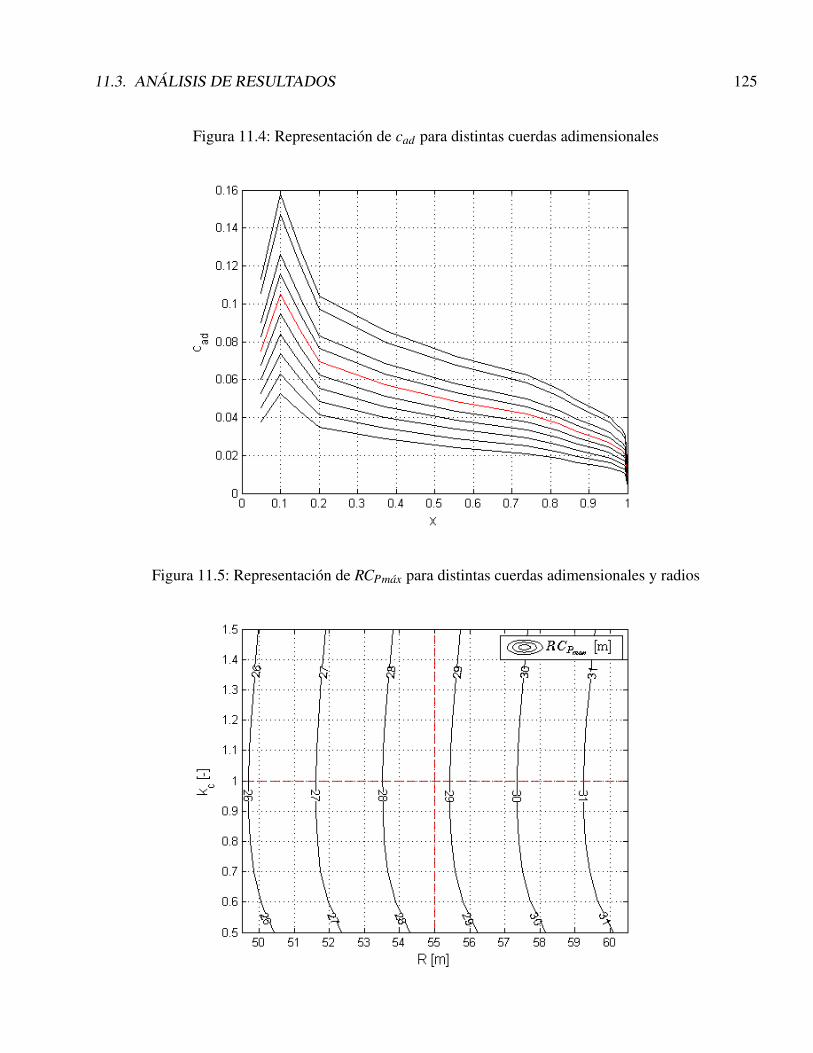
11.3. ANÁLISIS DE RESULTADOS 125
Figura 11.4: Representación de cad para distintas cuerdas adimensionales
Figura 11.5: Representación de RCPmax para distintas cuerdas adimensionales y radios
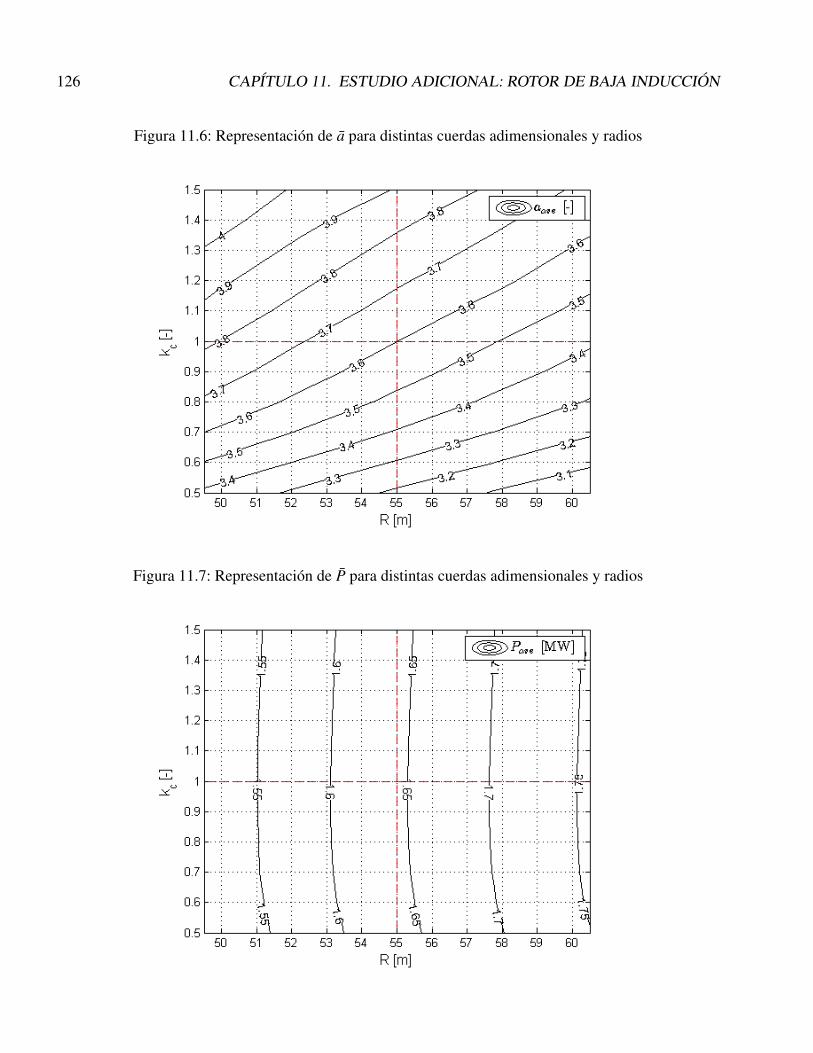
126 CAPÍTULO 11. ESTUDIO ADICIONAL: ROTOR DE BAJA INDUCCIÓN
Figura 11.6: Representación de a para distintas cuerdas adimensionales y radios
Figura 11.7: Representación de P para distintas cuerdas adimensionales y radios
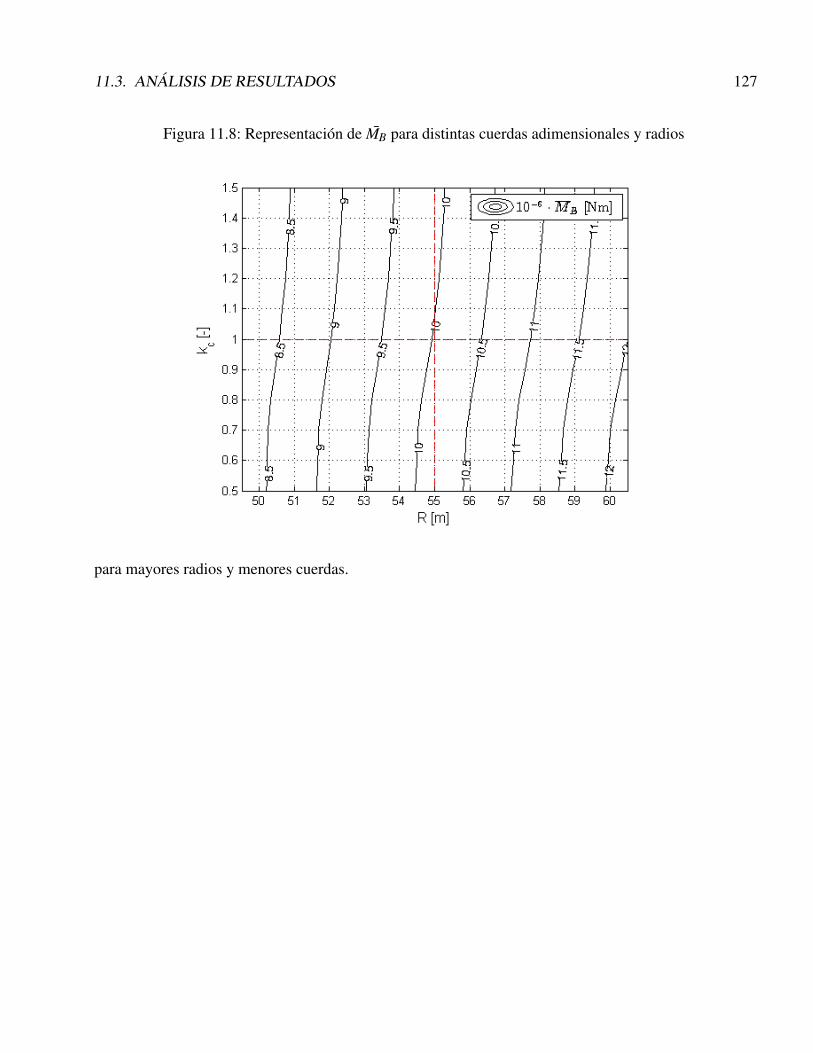
11.3. ANÁLISIS DE RESULTADOS 127
Figura 11.8: Representación de MB para distintas cuerdas adimensionales y radios
para mayores radios y menores cuerdas.

128 CAPÍTULO 11. ESTUDIO ADICIONAL: ROTOR DE BAJA INDUCCIÓN
Capítulo 12
Resultados y conclusiones
Como punto final al estudio del aerogenerador, se relata a continuación un resumen del procedimientorealizado con los resultados hallados, así como conclusiones personales al respecto.
12.1. Resumen de resultados
El aerogenerador estudiado se ha diseñado teniendo en cuenta los requerimientos iniciales, que son po-tencia nominal, velocidad de punta de pala limitada por ruido y parámetros de Weibull que definen elemplazamiento.
Se ha buscado obtener el mejor aprovechamiento energético posible. En el plano de la aerodinámica, seha buscado obtener el máximo coeficiente de potencia, para lo que se probaron distintas configuracionesde perfiles, tanto en tipos como en longitudes de los tramos de pala que abarcan, hasta dar con la quese ha considerado óptima y que se presenta en este proyecto, con perfiles DU40, DU25 y NACA63618,repartidos a lo largo de 135 metros. Así, se ha logrado una potencia específica de 349.31 W/m2, valor enel límite inferior de los disponibles en el mercado, y un factor de capacidad del 37.48%, lo que superacon creces el 20% considerado como necesario para ser factible económicamente.
Posteriormente, se ha realizado una estimación de masas de componentes tomando como referencia elinforme del NREL "Wind Turbine Design Cost and Scaling Model", el cual se basa en modelos de aero-generador de dimensiones considerablemente menores, por lo que, como se ha dicho anteriormente, losresultados carecen de la fiabilidad rigurosa y necesaria que precisaría un diseño real de un aerogenera-dor de este calibre. Dadas las características peculiares del aerogenerador en diseño, se han optado pordiseños avanzados y se ha aproximado en 4506 toneladas el peso de la máquina.
A continuación se ha desarrollado un estudio estructural, dimensionando la pala para el caso de carga máscrítica (velocidad nominal del aerogenerador). Se ha preferido la utilización de materiales compuestos,
129
130 CAPÍTULO 12. RESULTADOS Y CONCLUSIONES
de fibra de vidrio en el revestimiento y de fibra de carbono en el cajón de torsión y refuerzos de bordede salida, probando distintos espesores hasta encontrar una solución de compromiso entre garantizar elcorrecto comportamiento frente a las peores cargas y aligerar el diseño en lo posible. Se ha logradouna masa de pala ligeramente inferior a la extrapolada en la estimación de masas, lo cual es interesanteporque esto implica que el informe es escalable a modelos de aerogeneradores gigantes, relacionandodicha diferencia con la utilización de fibra de carbono, algo no tenido en cuenta por el modelo avanzadodel informe WindPACT.
En cuanto a la torre, también se ha decidido extrapolar datos, pero con menor fiabilidad que el diseño delrotor ya que hay más variación de modelos y menos cantidad de los mismos. Se ha optado finalmente poruna altura de 200 metros, con acero por material, y diámetros en la base y en lo alto de 20 metros y 5metros respectivamente.
Se ha hecho también un estudio de vibraciones, con objeto de hallar las frecuencias propias y las posi-bilidades de fallo catastrófico por resonancia. Los diagramas de Campbell y Waterfall muestran que lasprimeras resonancias se alcanzan en armónicos no muy energéticos (5º o 6º) por lo que en principio nopresenta problema alguno para la operación.
Como elemento generador de electricidad, se ha decidido seguir la tendencia actual del mercado, es-pecialmente en el caso de aerogeneradores de gran tamaño, y se ha escogido un generador de imanespermanentes con transmisión directa. En cuanto al sistema de control, se elige el control activo por cam-bio de paso. Se sigue así la tendencia de los aerogeneradores actuales de mayor tamaño.
Finalmente, para el análisis de costes se han tenido en cuenta tanto emplazamientos onshore como offs-
hore, teniendo en cuenta la variación del dólar y el euro en los últimos años, y resultando un COE de0.3073 para la estación onshore, calculado en euros a mayo de 2014. Asi mismo, el coste aproximadode cada máquina estaría en torno a los 22 millones de euros, con costes de emplazamiento de la estaciónaparte.
12.2. Conclusiones finales
De las condiciones impuestas y los resultados obtenidos se puede comentar lo siguiente:
Una potencia nominal de 20 MW sobrepasa la de cualquier máquina existente a día de hoy, duplicandola del más moderno aerogenerador en fase de diseño. Un aerogenerador con un rotor de 270 metros dediámetro es algo que nunca se ha logrado, y podría requerir técnicas de fabricación nuevas o en desarrollo,no contempladas por los métodos de estudio utilizados en el análisis que se basan en máquinas de menortamaño. Esto implica que, ya de entrada, sabemos que un diseño a partir de datos extrapolados puede
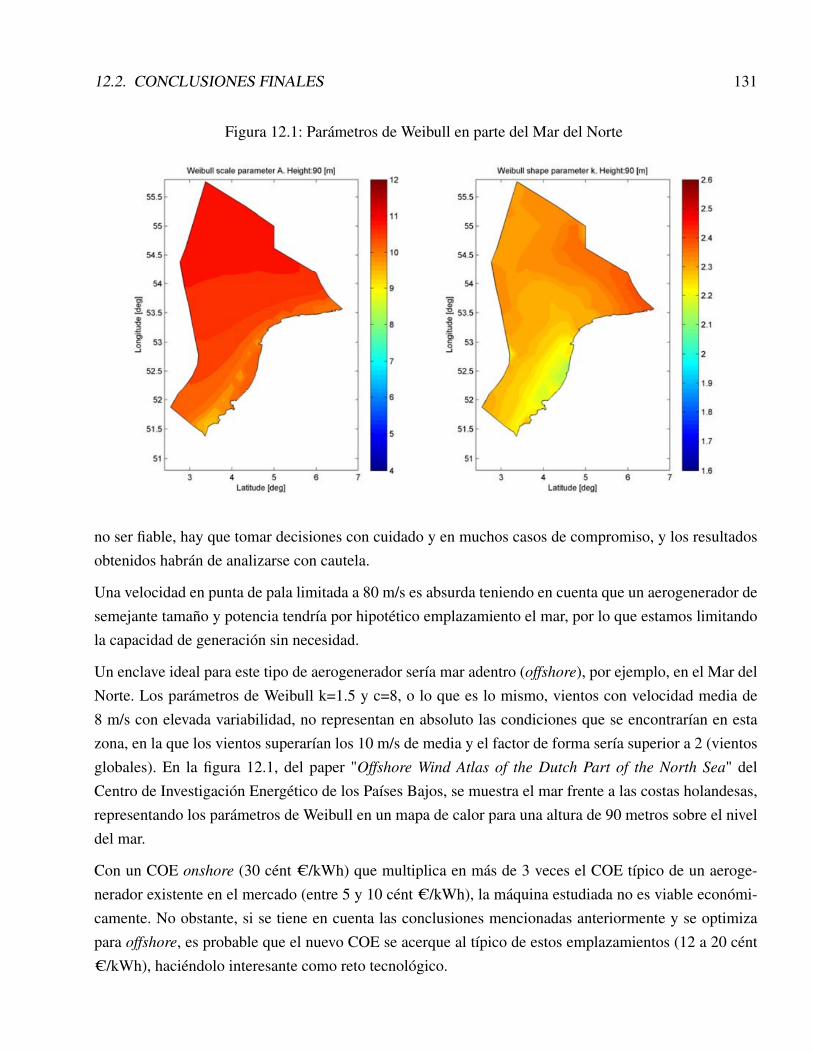
12.2. CONCLUSIONES FINALES 131
Figura 12.1: Parámetros de Weibull en parte del Mar del Norte
no ser fiable, hay que tomar decisiones con cuidado y en muchos casos de compromiso, y los resultadosobtenidos habrán de analizarse con cautela.
Una velocidad en punta de pala limitada a 80 m/s es absurda teniendo en cuenta que un aerogenerador desemejante tamaño y potencia tendría por hipotético emplazamiento el mar, por lo que estamos limitandola capacidad de generación sin necesidad.
Un enclave ideal para este tipo de aerogenerador sería mar adentro (offshore), por ejemplo, en el Mar delNorte. Los parámetros de Weibull k=1.5 y c=8, o lo que es lo mismo, vientos con velocidad media de8 m/s con elevada variabilidad, no representan en absoluto las condiciones que se encontrarían en estazona, en la que los vientos superarían los 10 m/s de media y el factor de forma sería superior a 2 (vientosglobales). En la figura 12.1, del paper "Offshore Wind Atlas of the Dutch Part of the North Sea" delCentro de Investigación Energético de los Países Bajos, se muestra el mar frente a las costas holandesas,representando los parámetros de Weibull en un mapa de calor para una altura de 90 metros sobre el niveldel mar.
Con un COE onshore (30 cént C/kWh) que multiplica en más de 3 veces el COE típico de un aeroge-nerador existente en el mercado (entre 5 y 10 cént C/kWh), la máquina estudiada no es viable económi-camente. No obstante, si se tiene en cuenta las conclusiones mencionadas anteriormente y se optimizapara offshore, es probable que el nuevo COE se acerque al típico de estos emplazamientos (12 a 20 céntC/kWh), haciéndolo interesante como reto tecnológico.

132 CAPÍTULO 12. RESULTADOS Y CONCLUSIONES
Bibliografía
[1] Á. Cuerva; Ó. López; C.J. Gallego, "Diseño conceptual de aerogeneradores", diciembre 2013
[2] Luengo Cerrón, María del Mar, "Diseño preliminar de un aerogenerador de 15MW de potencia",julio 2011
[3] L. Fingersh; M. Hand; A. Laxson; National Renewable Energy Laboratory, "Wind Turbine Design
Cost and Scaling Model", diciembre 2006
[4] D.J. Malcolm; A.C. Hansen; National Renewable Energy Laboratory, "WindPACT Turbine Rotor
Design Study", abril 2006
[5] García Villaverde, Rocío, "Diseño preliminar de un aerogenerador de 4.5MW de potencia", julio2010
[6] T. Burton; D. Sharpe; N. Jenkins; E. Bossanyi, "Wind Energy Handbook"
[7] Á. Cuerva; Ó. López, “Análisis de frecuencias y modos propios. Frecuencias y modos propios de
palas y torres de aerogeneradores”, mayo 2008
[8] World Wind Energy Association, "2013 Half-year report", marzo de 2014
[9] European Wind Energy Association, "Wind in power: 2013 European statistics", febrero de 2014
[10] Wikipedia (wikipedia.org)
[11] Asociación Europea de la Energía Eólica - European Wind Energy Association (www.ewea.org)
[12] Asociación Empresarial Eólica (www.aeeolica.org)
[13] Gamesa (www.gamesacorp.com)
[14] Enercon (www.enercon.de)
[15] Vestas (www.vestas.com)
133
134 BIBLIOGRAFÍA
[16] Comunidad "twenergy" de Endesa (www.twenergy.com)
[17] Calculadora de inflación del dólar estadounidense "US Inflation Calculator"(www.usinflationcalculator.com/inflation/current-inflation-rates)
[18] Datos de inflación del US Bureau of Labor Statistics.