Embed Size (px)
DESCRIPTION
strain
Citation preview

Acra metal/. Vol. 35, No. 12. pp. 2865-2875, 1987 OOOI-6160187 $3.00 + 0.00
Printed in Great Britain Pergamon Journals Ltd
DISLOCATION KINETICS AT HIGH STRAIN RATES
G. REGAZZONI,P U. F. KOCKS and P. S. FOLLANSBEE Los Alamos National Laboratory, Los Alamos, NM X7545, U.S.A.
(Received 26 August 1986; in revisedform 25 March 1987)
Ah&act-Dislocation theory is applied to the superposition of thermal-activation kinetics and phonon- drag control. The effect of the various parameters is analyzed in detail; in particular. reasonable dependencies of the mobile dislocation density on stress and structure are accounted for. It is concluded that the transition is generally quite sharp and commences at stresses not much less than 0.9 of the mechanical threshold (the flow stress in the absence of thermal activation, i.e. at zero temperature). At very high strain rates, the glide kinetics should be entirely controlled by drag under the applied stress, without any significant contribution from the obstacle strength. This theory should describe the actual transition between the two glide resistance mechanisms as a function of stress or strain-rate at constant structure. It is demonstrated that the observed transition to a linear relation between the strain-rate and the flow stress at constant strain, even if this were a comparison at constant structure, could not be due to viscous drag control; at most it could be an empirical description of the transition regime near its inflection point.
R&nrm&Nous appliquons la theorie des dislocations a la superposition de la cinetique par activation thermique et du controle par trainage de phonons. Nous analysons en detail l’effet des differents parametres; nous tenons compte en particulier d’effets mod&s de la contrainte et de la structure sur la densitb des dislocations mobiles. Nous en dbduisons que la transition a lieu en general dans un domaine trbs Ctroit et qu’elle dtmarre pour des contraintes a peine inferieures a O,9 fois la valeur du seuil mCanique (la contrainte d’ecoulement en l’absence d’activation thermique, c’est-d-dire au zero absolu). Pour les vitesses de deformation tres &levees, la cinetique du glissement serait entierement control&e par le trainage sous la contrainte appliquee, sans contribution significative de la force de I’obstacie. Cette theorie devrait d&crire la transition reelle entre les deux mecanismes de resistance au glissement en fonction de la contrainte ou de la vitesse de deformation pour une structure constante. Nous demontrons que la transition que l’on observe vers une relation lin6aire entre la vitesse de deformation et la contrainte d’&coulement, meme si l’on demeurait a structure constante, ne pourrait pas etre due a un contrcile par trainage visqueux; au mieux elle serait une description empirique du regime de transition p&s de son point d’inflexion.
Zusammenfassuug-Die iiberlagerung der durch thermische Aktivierung bestimmten Kinetik und des EinfIusses durch Phononenreibung wird mit der Versetzungstheorie behandelt. Der EinfluO der ver- schiedenen Parameter wird ausfiihrhch analysiert. Insbesondere werden einieuchtende Abhangigkeiten der beweglichen Verset~ngsdich~ von Spannung und Struktur ~r~cksichtigt. Es wird gefolgert, da13 der Ubergang im allgemeinen sehr scharf ist und bei Spannungen einsetzt, die sehr vie1 kleiner ah 0,9 der mechanischen Schwelle (der FlieBspannung ohne thermische Aktivierung, d.h. bei Null Kelvin) sind. Bei sehr groBen Veformungsraten sollte die Gleitkinetik vollstandig durch die Phononenreibung, charakteristisch fur die angelegte Spannung, bestimmt sein, ohne einen deutlichen Beitrag durch die Hindernisstlrke. Diese Theorie sollte den tatstichlichen tibergang zwischen den beiden Mechanismen des Gleitwiderstandes in Abhangigkeit von Spannung oder Verformungsrate bei konstanter Struktur beschreiben. Es wird dargelegt, da0 der beobachtete ubergang zu einem linearen Zusammenhang zwischen Verformungsrate und FlieDspannung bei konstanter Verformung, such wenn das einen Vergleich bei konstanter Struktur bedeutete, nicht von der Phononenreibung herriihren konnte. Allenfalls kiinnte es eine empirische Beschreibung des ~~rgangsbereiches in der Nlhe seines Wendepunktes sein.
I. INTRODUCTION
Many previous investigators of the high-strain-rate deformation of metals have shown that the strain- rate sensitivity increases at strain rates above lo3 s--r. Figure 1 shows the results obtained on pure poly- c~stalline copper by Foltansbee er al. [l]. At low strain rates, the stress increases slowly with the logarithm of strain rate. in this regime, the strain- rate sensitivity l/m = 8 In a/a In i is typically on the order 0.01. Above lo3 s-‘, l/m increases and reaches
1P
-- resent address: Cegedur Wchiney, centre de Recherches de Voreppe, 38340 Voreppe, France.
the value 0.2 for a strain rate of 2 x 104s-‘. This behavior has been observed in many materials, e.g. in aluminum single crystals [2], in polycrystalline alumi- num [3], in zinc single crystals [4], in copper single crystals [5,6], in polycrystalline copper [l, 7-91, in mild steel [lo], in high-strength steel [I I], in tantalum [IZ], etc.
One characteristic of most of these experimental results is that between strain rates - IO3 to - lo4 s-r (or even 10’ s-l), the macroscopic flow stress o (com- paring at constant strain 6) typically varies linearly with strain rate i according to
u =a,+/%. (1)
2865

/ I 1 However, it can be pointed out that equation (3)
has to be replaced by an effective stress 6, = u - CT,,
holds only for the case of a perfect crystal. It has been argued that for metals with defects cr in equation (3)
where trt, is interpreted as the threshold stress, i.e. that critical stress above which thermal activation is no longer necessary to assist the dislocation past the barrier [2]. Although this interpretation of experi- mental results has been common, it leads to serious theoretical objections that have been reviewed by Follansbee et al. [I]. These inconsistencies between the experimental results and theory have been well documented j14, IS], but interpretation of the in- creased strain-rate sensitivity at high strain rates as indicating a transition to dislocation drag controtled
Fig. 1. Strain-rate dependence of the flow stress of oxygen- deformation has persisted (see, for instance, [16]), and free-electronic copper at room temperature for a constant
strain t = 0.15. description of deformation at high strain rates with equation (1) is comm0n.t
Our interest here is to investigate deformation The increase in strain-rate sensitivity at high strain kinetics at high strain rates in order to define require- rates has been interpreted as a change in the mech- ments for the transition from thermally activated to anism controlling deformation (see for example dislocation drag controlled deformation. In section 2 121). Qualitatively, in the low-rate range, dislocation of the present paper, we review the continuous glide motion is controlled by thermal activation. At high of dislocations in the presence of obstacles and strain rates, it is thought that thermal activation is no conclude that the presence of defects does lead to the longer necessary to assist a dislocation past a barrier. definition of an effective stress in equation (3), but The dislocation motion becomes continuous and the that the latter cannot be compared with cr - et,. dislocation velocity is solely limited by dissipative Given that the experimental results are inconsistent (drag) mechanisms (for a review, see [13]). with the “simple” dislocation drag analysis presented
If the high-rate regime is indeed dominated by pure above, there are several additional effects that could drag mechanisms, a quantitative description of the lead to the empirical law expressed by equation (1). material behavior is easy to derive. The strain rate l For example, dislocation drag may not be the only is related to the dislocation velocity o by the kinetic mechanism controlling deformation at high strain equation rates; in this case, the superposition with other
reasonable mechanisms must be considered. This possibility is investigated in section 4 for the transi-
where pm is the mobile dislocation density, b is the tion from thermal activation to dislocation-drag- Burgers vector, and @ is the appropriate Taylor controlled defo~ation. Another possible source for factor. For the case of pure drag (i.e. in a perfect the divergence between experiment and theory is the crystal without any obstacle), damping is viscous and interpretation of the mobile dislocation density. In the dislocation velocity is given by the above analysis, P,,, is considered to be a constant.
v = ub/@B. (3) However, Frost and Ashby [15] suggested that the dependence of pm on strain rate (or stress) could
where c /lr;i is the stress acting on the dislocation and provide the link between experiment and theory. This B the drag (or damping) coefficient. In equation (2), dependence is difficult to assess theoretically, but the only parameter that is difficult to measure or to in section 5 a procedure is proposed for analyzing assess theoretically is the mobile dislocation density experimenta data to obtain information on the be- pm. If pm is constant, combining equations (2) and (3) havior of the mobile dislocation density. shows that CT is directly propo~ional to t. Thus, if the Generally, a review is presented of the kinetics of
experimentat results were indeed in the pure drag dislocation motion at high strain rates on the basis regime, the value of u, in equation (1) would have to of the known (and generally agreed upon) principles be equal to zero. This prediction is in contrast with of dislocation theory. Particular attention is given to the experimental result [equation (I)] in which a, the transition from thermal activation to drag con- represents a large fraction of cr itself. trolled deformation. A simple model of dislocation
behavior, following previous investigators [14, 171,
2866 REGAZZONI et al.: D~SL~ATION KINETICS
tThis is not necessarily wrong as an empirical description of enables the identification of the important variables
monotonic deformation within the strain-rate range used and their respective influences on the transition.
to establish equation (I), but serious errors may result if Signatures of drag contributions are clear.
equation (1) is extrapolated outside this strain-rate range We emphasize that previous interpretations of or if strain rate path changes are modelled. the increased strain-rate sensitivity observed at high

REGAZZONI et al.: DISLOCATION KINETICS 2867
strain rates are typically based on a comparison of data analyzed at constant strain with models that are inherently valid at constant structure. Such com- parisons can be made only with caution. As a matter of fact, it is known that for most materials, plastic strain is not a state parameter: a sudden change in strain rate from i, to i, does not lead to the same stress level as if the entire loading were performed at il. Thus, strain is not an adquate parameter to represent the structure, and the constant-structure strain-rate sensitivity is generally lower than the constant-strain strain-rate sensitivity deduced from tests performed at constant strain rates. The differ- ence can be attributed to dynamic recovery processes. For the case of copper, Follansbee et at. j18j have shown that the linear behavior expressed by equation (1) was mainly a consequence of comparing data at constant strain and not representative of the constant-structure behavior of the material. None- theless. when experimental results are available at constant structure, either through the use of strain- rate change tests or by measuring and holding con- stant some structure parameter [18], then results can be analyzed according to the procedures outlined in this review.
2. DISLOCATION-OBSTACLE INTERACTIONS IN THE DRAG-CONTROLLED REGIME
In an otherwise perfect crystal, a dislocation mov- ing quas~staticaliy encounters a resistance due only to the periodic structure of the lattice (Peierls stress). In practice, imperfections such as impurity atoms, pre- cipitates, lattice point defects and other dislocations interact with the glide dislocations and offer resis- tance to their motion. The interaction of these defects with the moving dislocations results in a glide re- sistance r varying along the slip plane. As a con- sequence of this resistance, there is a level of stress above which a dislocation cannot find equilibrium; this stress is called the threshold stress [19]. Above this stress, the dislocation motion becomes con- tinuous, solely controlled by drag produced by its interaction with phonons and electrons of the crystals [equation (3)].
2.1. The glide resistance projile
Schematically, when one set of obstacles controls the dislocation motion, the glide resistance on a moving straight dislocation can be represented as on Fig. 2, which is taken from Kocks et ai. 1191. In this figure, the two large excursions represent the barriers corresponding to the localized (or short-range) ob- stacles, which have an average width A, and are separated by an average distance R,. The height of the barriers is called the threshold stress E. Between the barriers, the glide resistance is provided by all the surrounding obstacles and is called the long-range interaction. Its level Z is given by the rate of energy storage with plastic strain F,,,, which is normally
I x2
Fig. 2. Typical glide resistance profile for two obstacles of width E., separated by a distance A,.
small in comparison with o. Precisely, z and cr are related by [19]
in/a = (dF,,,,/dt)/(d Wldc) (4)
where d W denotes the plastic work increment and dt: the plastic strain increment. The right-hand side is known to be smali, usually less than 0.1. Therefore, for many applications, f can be neglected in com- parison with LT. In the present profile, it should be superposed with the periodic resistance due to the lattice (Peierls stress). The latter is neglected in the present study. However, it could be important in some cases [12].
It is clear from Fig. 2 that the threshold stress separates two regimes for a dislocation moving under the action of a constant applied stress a/&?. When D jS > i the driving force {to be defined in section 2.2) is positive everywhere and the dislocation must keep moving. Its velocity is controlled by damping mechanisms. This motion is called continuous glide and is reviewed in the next section. The second regime is defined by o/a < z^. Here, dislocations must stop at various obstacles. The dislocations may be relaxed by thermal fluctuations and then travel at the drag-controlled velocity to the next obstacle. This process is called jerky glide and is studied in sections 3 and 4.
It is evident that a dislocation stopped in front of an obstacle cannot move farther in the absence of thermal activation unless the applied stress is (r /iz;i = f. Therefore, the threshold stress is related to the flow stress g at absolute zero temperature.
2.2. The average dislocation velocity in the drag- controlled regime
For the case of continuous glide, the equation of motion of the dislocation has been derived and the dislocation motion is well understood for simple configurations (see for example [19]). One major conclusion is that the acceleration time due to the dislocation mass can be neglected. The dislocation

2868 REGAZZONI et al.: DISLOCATION KINETICS
velocity is determined by the equilibrium between the applied stress and the resistances occurring from the obstacles and from drag. With the notations of Fig. 2, this balance of forces is written as
or
(Tb/H = r(y)b +&J(y) (Xl
[a/R - z(y)]b = Bv(y). (6)
In equation (6), ajn;i - s(y) is the “effective stress” actually acting on the dislocation and [a/M - t(y)]b represents the local driving force per unit length.
The average dislocation velocity 6 is readily ob- tained by dividing the distance between obstacles 1, by the integrated time spent at all positions
or
It is evident that ~7 depends on the shape of the obstacles and on the respective influence of 1, and &. This dependence is illustrated by the examples below. There is a well-known solution for a sinusoidal variation of the profile resistance (A, = A,) but with a nonzero mean value e [20]. In this case.
a=;:blB[(a/W-F)2-((Zl-_)2]1’2. (9)
This relationship is plotted in Fig. 3, It gives zero velocity for a/M < Q and approaches d = b(a/Il;i - f)/B for high stresses. We note, however, that deviation from the linear relation is still substan- tial at a/.&Z = 22^.
For sharper obstacles with longer free-flight dis- tances, Kocks et al. [ 191 derived an analytical expres- sion for 0 for the case of a glide resistance profile consisting of a series of single periods of a sine curve of wavelength Ai, spaced A2 apart, with only the uniform energy-storing Q in between, The curves of Fig. 3 show that the rate at which the ~7 curve approaches the asymptotic straight line depends on
a > .@B/3B (,uf~)“*. (10)
For copper, the limiting stress computed from equa- tion (10) is 400 MPa. This stress level is fairly high for copper, but stresses of this magnitude have been measured at very high strain rates by Clifton et al.
[23]. Thus, relativistic effects may becime important when a JR > 3 and perhaps even in the transition region between continuous and jerky glide (to be discussed in section 4.1).
Fig. 3. Stress dependence of the average dislocation velocity. Another mechanism expected to affect the inter-
i
Fig. 4. Typical deviations of the average dislocation velocity expected from inertial effects and relativistic effects. (The curve labeled “Thermal Activation With Drag” is described
in Section 4 and Fig. 5.)
the ratio &/A,. For materials for which the barriers are forest disl~ations, the width I, is a few Burgers vectors and the spacing distance 14: on the order of microns. Thus &/A, is expected to be a large number and the limit velocity is expected to be reached at stresses just slightly greater than Q.
The above results were obtained for the case of a straight dislocation moving in the glide resistance field of Fig. 2. It has been shown that the conclusions can be extended to the case of a “straightish” dis- location, bowing between adjacent barriers, un- bowing after the obstacle is overcome and continuing its flight straight to the next obstacle [14, 15,211. In an unpublished work, Kocks has also shown that the trends remain the same for the case of area1 glide, i.e. for the expansion of dislocation loops through a plane studded with obstacles.
The velocity at which a dislocation moves is limited by the shear wave velocity u, = (p /P)“~, where p is the elastic shear modulus and p is the mass per unit volume. Several expressions have been proposed to describe the dependence of the average dislocation velocity on the applied stress in this regime; essen- tially all give an asymptotic approach to the shear wave velocity as shown schematically in Fig. 4. Weertman 1221 has suggested that deviation from the linear behavior expressed by equation (3) may begin at v > v,/3. Using this criterion, the stress at which these “relativistic effects” begin to limit the dis- location velocity is

REGAZZONI et al.: DISLOCATION KINETICS 2869
action between a moving dislocation and an obstacle is inertia. Inertial effects can influence the dislocation behavior in two ways. First, they prevent the dis- location from instantaneously reaching its drag- controlled velocity when the driving force is suddenly changed; we noted above that this effect can be neglected, Second, inertia prevents the dislocation from instantaneously stopping when the driving force suddenly drops to zero. This effect can assist a dislocation in overcoming an obstacle (known as the “overshoot effect”) and its influence can be easily evaluated through the dimensionless ratio [19]
ys,,,Jb = opb2/2&?B (11)
where ystop is the stopping distance of a dislocation moving at its drag-controlled velocity under the stress a/a. Granato [24] and Schwarz and Labusch [25] have shown that penetration will not occur for a dislocation pinned by weak obstacles of spacing L if B exceeds the critical value
B, = 271 (I-m,)‘“/L (12)
in which r is the dislocation line tension and m, the disl~ation mass per unit length.
At low temperatures, where the value of the drag coefficient decreases significantly, there is experi- mental evidence that obstacles can be overcome inertially [24]. In fact, experiments by Schwarz. et al. [26] indicate that inertia begins to influence static deformation in copper at T -c 50 K. The effect of inertia on the average dislocation velocity is shown schematically in Fig. 4. Inertia leads to obstacle penetration at stresses below z^. At room temperature, where the drag coefficient is considerably higher, there is no evidence to date that obstacles can be overcome inertially at high strain rates.? Although this question remains open, lack of data suggests that inertial effects can be neglected for an analysis of room temperature, high-strain rate experiments.
General features of the dislocation-drag-controlled regime can be summarized as follows:
(i) The average dislocation velocity 6 is zero when the applied stress g/lz;i is lower than the threshold stress z^. This conclusion may be modified for the case of very low drag coefficients (for example at very low temperatures) where inertial overshoot effects may become important.
(ii) The instantaneous velocity of a moving dis- location is the drag-limited velocity given by equation (1). At high stresses, relativistic effects may limit the velocity to the shear wave velocity.
(iii) At stresses above i, the mean dislocation velocity is proportional to cr, = I~/I$? - C and we can write
Bz7 = b(a/Il;i- e) = bcr,. (13)
fThe stress level is comparable for low-temperature static tests and for high-strain-rate room-temperature tests.
A M, X,iZ--E
(iv) In the dislocation-drag controlted regime, only the average energy-storage stress f is felt as a “back stress” by the dislocation.
The latter conclusion is in contrast with previous interpretations where the localized obstacles were assumed to be felt and a, was taken as cr/M -Q. Thus, it is impossible to interpret the intercept value eb of equation (1) on the basis of dislocation drag and obstacles only. (We recall that f is a small fraction of a/.n;i whereas cb is a large fraction of a.> Neither relativistic effects nor inertial effects can alter this conclusion. Therefore, if the experimental results are indeed in the viscous drag regime, then another contribution, such as a dependence of pm on stress, must be present. This possibility is explored in section 5.
Another conclusion of the analysis presented in this section is that the critical demarcation line that indicates the beginning of the viscous drag regime is a stress rather than a strain rate. As a consequence, if for example the drag coefficient B is changed (e.g. by changing temperature), the critical velocity and thus the critical strain rate will change but not the critical stress. This stress is the threshold stress fl related to the flow stress c at OK, and therefore measurable independently (see section 3).
It must be noted that the result is independent of how many different mechanisms contribute to i and whether the overcoming of these obstacles at low strain rates is athermal or thermally activated. The important point is that i incorporates the effects of all the mechanisms.
3. THERMAL ACTIVATION WITHOUT DRAG
3.1. Thermal a~t~uatio~
We first consider the case of thermal activation without drag. Although the actual variation of the flow stress with strain rate and temperature depends on the details of the rate-controlling deformation mechanisms, a general relationship between applied stress, strain rate, and temperature at constant struc- ture is best described by a law of the form
i =i,exp(-AG/kT) (14)
where 4 is the pre-exponential term, AG the activa- tion free energy, k the Boltzmann constant, and T the temperature. The stress dependence enters essen- tially through the activation free energy AG. For short-range obstacles, a general description of AC is given by [ 191
AC = F,[1 - (o/li;iz^)“]q. (15)
This equation contains the physical parameters of prime interest. The total free energy F, is related to the strain-rate sensitivity of the mechanism (to be defined later) and z^ has been defined above as the maximum glide resistance. The constants p and q describe the statistical shape of the obstacle profile.

2870 REGAZZONI ef al.: DISLOCATION KINETICS
The pre-exponential factor i,, can also depend on the stress. However, this dependence is expected to be small (and is generally neglected),t whereas the stress dependence of the exponential term in equation (14) is considerably larger.
In addition to the explicit dependence described by equation (14), one must consider the temperature dependence of the activation free energy AG. The latter is usually assumed to be that of the shear modulus p [19]. Factoring out this temperature de- pendence in equation (15) gives
AG = dW3gb/AU
where g and g,, are the normalized values of free energy and total free energy, respectively. The tem- perature dependence of i0 is expected to be that of the effective frequency v, (to be defined in section 4), which is negligible compared with the temperature dependence of the exponential term. Therefore i, can be considered as a constant in equation (14).
The strain rate sensitivity is often defined by its inverse, the stress exponent M, where
+(&~[l-(&)jJ-i. (17)
The symbol z^ in the partial derivative emphasizes that the differentiation is performed at constant structure and that m characterizes the strain rate sensitivity at constant structure. Also from equation (17), it can be seen that F0 (or go) is related to the strain-rate sensitivity of the thermally activated mechanism; an increase in F,, and thus of m, indicates a decrease in the strain-rate sensitivity.
The possible range of values for p and q is re- stricted [19]. Two sets of values are typically used. The set p = q = 1 corresponds to a “rectangular” obstacle profile and a regular lattice arrangement of obstacles and leads to a constant activation volume V = mkT/a = F,I&??. The set p = l/2 and q = 312 corresponds to a more realistic obstacle shape and distribution. The latter values are most commonly used; they lead to an m-value, as defined by equation (17), which is almost constant over a wide range of stress (approximately O.lz^ < o/a < 0.9<). Equation (14) is then equivalent to the empirical law
t! = i,(a/hB)” (18)
that is well known to represent most of the experi- mental results in the thermally activated regime. For
tIf we consider only its stress dependence, equation (14) can be approximately replaced by the empirical law i = C, (u /fl< )” where the stress exponent m is usually above 100.
these reasons, the expresssion
AG = F,[l - (a/~f)“2]3’2 (19)
can be used in the following as a reasonable approxi- mation.
The average dislocation velocity v is given by fi = @i /p,b = ii&,/[p,b exp(AG /kT)] and varies schematically as in Fig. 3, assuming a constant dislocation density pm. The variation is typical of an exponential or a high-power law; the velocity in- creases slowly at low stresses and rapidly at high stresses. The curve reaches the axis r = r^ at a point off the scale. Figure 3 also compares separately the qualitative predictions for the physical mechanisms of jerky glide without drag (a/H < 2^) and of con- tinuous glide (a /a > Q). It is clear that for a/~%? 2 t^, neither picture is adequate, and a transition from thermal activation to viscous drag must be consid- ered. Again, the critical parameter demarking this transition is the threshold stress z^.
3.2. Measurement of the threshold stress
In practice, the threshold stress is a measur- able parameter. For a complete description of the measurement techniques, the reader should refer to Follansbee et al. [18] or Follansbee [27]. The pro- cedure is summarized below. Combining equations (14) and (16) and rearranging the result gives
(LJ=(_jEJ
x[l-(ln~)$$--J]. (20)
This equation implies that a plot of {a/p(T)}‘/’ vs {kT/p(T)b3}2’3 for experiments carried out on the same structure at constant strain rate but varying temperature should yield a straight line. The intercept at zero temperature gives the mechanical threshold normalized by the shear modulus extrapolated to absolute zero, whereas the slope is related to the normalized free enthalpy.
If the normalization is valid, the extrapolated value of the threshold stress should be independent of the strain rate at which the tests are performed. However, the strain rate must be low enough so that equation (14) holds; equation (20) is valid only when thermally activated mechanisms control the deformation. Also, the test temperature must be high enough to avoid the occurrence of the overshoot effect due to inertia. Given these restrictions, the above measurement yields Q, the maximum glide resistance, regardless of how many mechanisms might be involved. The difficulty of the procedure is to perform tests at constant structure. Examples are described in Fol- lansbee et al. [18], Follansbee [27], and Follansbee and Gray [28].

REGAZZONI et al.: DISLOCATION KINETICS 2871
4. DISLOCATION KINETICS IN THE TRANSITION REGIME (a < Mi)
4.1. Superposition qf thermal activation with viscous drag
Previous investigators have modeled with various degrees of complexity the transition from thermally activated to dislocation drag-controlled deformation by summing the time spent awaiting thermal activa- tion energy to overcome a barrier and the time spent moving to the next barrier. Models that consider an
ensemble of discrete obstacles have been proposed by Klahn et al. [14] and by Frost and Ashby [15],
whereas models that consider only the interaction
of a straight dislocation with a barrier have been described by Kumar and Kumble [7], Kocks et al. [19], Ishii [29], Hoge and Mukherjee [12], Shiori et al. [30], and Clifton [17, 311.
Assuming a given structure, described for example by the glide resistance profile shown schematically
in Fig. 2, we consider the population of mobile dislocations consisting of two classes, those that are actually running and those that are waiting for thermal activation energy. Following previous in- vestigators, we define their average velocity by
v = &/(t, + t,) (21)
where t, is the average waiting time and t, the average running time. The former is given by the Arrhenius equation
t, = v;’ exp(AG/kT) (22)
where v, is the effective attempt frequency and AG the activation free energy defined earlier. Neglecting the energy-storage stress t, the dislocation velocity is given by equation (2) which gives
t, = /Z,Blii’/ab (23)
where 1, is assumed to be small compared with 1,. Combining equations (2) (21), (22) and (23) gives
i -c =
6
where
t!- E pmb2z^
and
/
1 (24)
IBM (25)
I) s bz^/A,Bv,. (26)
We note that equation (24) can be rewritten as
e a 1 -c = _^ t Mr 1 + t,/t,
(27)
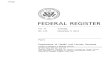
It is readily seen that II/ is equal to the ratio i/i,, and that ;is the maximum strain rate that can be achieved under the applied stress cr = Mt^, when all the mobile dislocations pm travel at the drag controlled velocity V = <b/B [equation (3)]. Figure 5 shows typical vari- ations of strain rate versus stress for a constant mobile dislocation density pm and for the following
0.l -
0.0 I I ,/ ,
10-4 10-z 100 102 104 106
STRAIN RATE, s-1
Fig. 5. Predictions of the model for thermal activation only, drag only (without obstacles) and superposition of thermal activation with drag ($ = 5 x IO-’ and M = 100): (a) semi-
logarithmic scale and (b) linear normalized scale.
values of the parameters: II/ = 5 x 10m3, Fo/kT = 350 (m E 100) and t! = 2 x lo4 s-l. Figure 5(a) is a semi- logarithmic plot of the applied stress normalized by ,%?f vs strain rate. In the presence of thermal activa-
tion only [equation (14)], the stress increases slowly with the logarithm of strain rate, whereas in the
presence of dislocation drag only, the curve is steep and reaches the strain rate i for the applied stress 0 = n<. The curve obtained when both thermally
activated and drag mechanisms are operative follows the thermal activation curve at low stresses (t,>> t,) and the drag curve at high stresses (t,>> t,).
Additional details of the transition are illustrated in a plot of the stress normalized by li;ir^ vs strain rate normalized by i [Fig. 5(b)]. The curve for pure drag is represented by a straight line that intercepts the
origin because the energy storage stress f has been neglected. The curve for both thermal activation and drag again follows the thermal activation curve for
low stresses and the drag curve for high stresses. The transition is essentially complete at t’; Z/ 10 gives an order of magnitude of the strain rate at which the transition starts. Drag becomes dominant at the inflection point of the transition curve. The corre- sponding stress is approximated by the stress at which the running time becomes equal to the waiting

2812 REGAZZONI et al.: DISLOCATION KINETICS
time, which is given by the intersection of the thermal activation and the drag curves [Fig. 5(b)].
4.2. Detailed study of the transition
The stress at which the transition occurs depends on the relative importance of thermal activation with respect to drag. This dependence is clearly evident through the two parameters I/J and FojkT in equation (24). The parameters b and v, in @ are constants, although the latter is known approximately to only one order of magnitude: v, = 10” to 10” s-l. Assuming that Q has been measured independently, the two remaining parameters are B and L, . The drag coefficient R is difficult to determine. Its experimental measurement is possible in principle, although deli- cate in practice. Data have been reviewed by Klahn et al. [14] and by Kocks et al. [19], and it has been observed that over the temperature range 76-300 K, and for most metals and ionic crystals, B varies by Iess than one order of magnitude in the range
lo-’ < B < 10m4 Pa.s.
In general, B increases with temperature. This trend is consistent with the phonon drag mechanism, which is considered the dominant mechanism, except at very low temperatures. For phonon drag, the drag coefficient takes the form [19]
B 2 (kT/Rw,) (28)
where w, is the atomic frequency and R the atomic volume. It has been verified that equation (28) is consistent with most of the experimental data within a factor of 2 [19].
The mean free distance AZ separating obstacles is also difficult to determine accurately. Its value de- pends on the structure and on the nature of obstacles. For dislocation hardening, d1 is expected to be on the order of the cell size [32,33]
0.1 pm < 2, < 10 jfm.
Combining the above estimated values for &, B and v, yields an estimated $ that lies within the range
10-5 < $ < 10-I.
The value of Fo/kT can be derived from low-strain- rate experiments, either by fitting equation (14) with experimental results or with the determination of the stress exponent and calculating FJkT using equation (17) (with p = 0.5 and q = 1.5). Note that equation (17) is used only over a certain range of stress; in particular, the regime of very low stresses is not used. Thus, F. as a fitting parameter does not refer to the total activation energy but rather to the slope in the stress temperature diagram at low temperatures. In that regime, one can also use a power law [equation (18)] instead of an exponential law [equation (14)]. In general, m ranges between 30 and 300, corresponding to values of Fo/kT roughly between 75 and 1000 (at T = 300 K). In the following, we use the exponentiai expression because it includes an explicit temperature
NORMALIZED STRESS, CI’/&~?
0.0 0.0 0.2 0.4 0.6 0.8 ta
NORMALlZED STRESS, Ulriif
Fig. 6. Predictions of the model as a function of (a) the strain-rate sensitivity of the thermally activated process (at $ = 5 x lo-‘) and (b) the parameter 16_ (at m = 100).
dependence. However, we will make use of the equiv- alence between F,/kT and the stress exponent m because the latter is more common.
The influence of the above par&meters on the transition is illustrated on Figs 6 and 7. The influence of Fo/kT (m) and $I is first demonstrated on coordi- nates of a/% on Fig. 6(a) and (b). An increase of F,/kT, i.e. a decrease of the strain-rate sensitivity, or an increase of $ delays the transition to higher stress ratios because it increases the ratio t,/ t,. However, a comparison of Fig. 6(a) and (b) shows that Fo/kT (m) has a stronger influence on the transition than does JI. Figure 6(b) enables a direct evaluation of the variation of the spacing & If the variation of Q? is due to a change of B, the conclusion is not complete because the strain-rate axis is normalized by i, which is B dependent. A full picture then requires a non- normalized strain-rate axis as shown in Fig. 7(a) and (b). In Fig. 7(a), we demonstrate on a normalized scale the respective influence of a change in strain- rate sensitivity of the thermally activated mechanism and of a change in drag, due for example to an increase in temperature. Curve I is the reference curve, corresponding to an absolute temperature T, a stress exponent m, and a drag coefftcient 3. Chang- ing T to T ‘ = 2T, we expect the strain rate sensitivity

REGAZZONI et al.: DISLOCATION KINETICS 2873
NORMALIZED STRESS, u&ii
NORMALIZED STRESS, (T lili f
Fig. 7. Predictions of the model as a function of tem- perature, as it influences the rate sensitivity and the drag coefficient: (a) linear normalized scale and (b) linear i scale. Curve 1 is for M = 200 and IJ = 5 x 10m4, curve 2 is for m = 100 and $ = 5 x 10m4, and curve 3 is for m = 100 and
$ = 2.5 x 1om4.
l/m [equation (17)] and the drag coefficient B to be multiplied by a factor of 2, which changes them to m’ = m/2 and B’ = 2B. Comparison of curves 1 and
2 illustrates the influence of the change in strain-rate sensitivity, whereas comparison of curves 2 and 3 illustrates the effect of a change in the drag coefficient. The increase of T leads to a transition occurring at lower stresses, and this effect is essen- tially due to strain-rate sensitivity. In this plot, the effect of drag may be considered negligible. Figure 7(b) is a plot of the same curves but on a non-
normalized axis. The change in drag has a weak effect on the transition stress, but a strong effect on the
corresponding strain rate. On this diagram, strain rate is arbitrary (i.e. normalized by a constant) because it depends on pm which is unknown but assumed constant. In this case, we note that the partial derivative & /i?T), becomes negative when drag becomes the controlling deformation mech- anism.
The threshold stress z^ appears in tj and t! as does B. Thus, curves 2 and 3 in Fig. 7(b) also illustrate the influence of a change of the threshold stress on the transition.
To summarize, the main characteristics of the tran-
sition from thermally activated to drag-controlled
deformation can be summarized as follows:
(i) The stress ratio a/li;iz^ at which transition occurs
is essentially determined by the strain-rate sensitivity of the thermally activated process. The higher the strain-rate sensitivity, the lower the transition stress. This stress only slightly depends on the drag process.
(ii) The transition starts at a strain rate of about P/l0 and is complete at t?. The strain rate essentially depends on the mobile dislocation density pm and increases with an increase of the threshold stress z^ or a decrease of the drag coefficient B.
5. THE MOBILE DISLOCATION DENSITY
The macroscopic strain rate is, according to equation (2), proportional to the mobile dislocation
density pm
i = p,bcli@. (2’)
For the definition of the average velocity given by equation (21), the mobile dislocation density in equa-
tion (2’) includes at any instant those dislocations that are actually running and those that are waiting (but could be activated). At any instant, the macro- scopic strain rate is provided by those dislocations
that are running, pr
i = p,bo,/R (29)
where c, is the limiting drag velocity given by equa-
tion (3) and is also equal to i2/tr. A comparison of equations (2’) and (29) leads to
P,lP, = cl4
and from equation (27), we obtain
i/P
(30)
p,lp, = P/C, = _^. cr/Mt
(31)
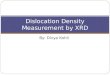
Figure 8, which is a plot of p,/p, vs o/h%, shows that pr is strongly dependent on a/at (i.e. on strain rate).
Fig. 8. Stress dependence of the ratio of the mobile dis- locations actually running pr to the total including those waiting to be activated P,,, ($ = 5 x 10m5 and m = 100).

2874 REGAZZONI ef al.: DISLOCATION KINETICS
The ratio p,/p, increases with stress and reaches unity when the transition is complete; then all mobile dislocations are running.
The stress dependence of the mobile (running plus waiting) dislocation density pm remains the final factor to consider. Yet, because the mobile dis- location density is difficult to measure or to assess theoretically, it has remained an elusive, poorly understood quantity. The main questions are:
(i) How is pm related to the total dislocation density?
(ii) For a constant structure, does pm vary with stress or strain rate (as pr does)?
Our purpose is to provide a framework for in- vestigating behavior of the mobile dislocation density based on experiments in the high strain-rate regime. First, pm may be expected to increase with the total dislocation density p, which is known to increase with strain. Thus, at least for materials for which the dislocation forest provides the localized obstacles, P,,, would be a function of the threshold stress z^. Because p varies with z^ at a power equal to 2, p,,, could be expected to vary with ? in a similar way. To in- vestigate this behavior, equation (24) can be written as
with
(32)
and
f(x) =x/(1 + +x expIAG(x)/~~~ (33)
x = a/Ii&.
For a given x,f(x) varies with ? as $ does (assuming that Fo/kT is invariant with strain, which is a good first approximation for materials for which forest dislocations provide the localized obstacles). How- ever, when the second term in the denominator of equation (33) is small with respect to l.O,f(.x) is only slightly sensitive to $, Thus, if pm is proportional to Q”, then a plot ofe/l”+’ vs x should be invariant with strain (i.e. all the experimental points should fall on the same trend curve). Two situations are possible. If the trend curve is described by the functionf(x) and in particular if, for high G/I% ratios (above 1 S), this plot gives for any reasonable value of n (n = 1 or 2 [19]) a straight line that goes through the origin, then the correct mechanical threshold stress dependence of pm has been obtained. If, at a/&& ratios high enough to be in the drag regime, the pIot does not extrapolate through the origin, this suggests that the mobile dislocation density varies with stress at constant structure. The deviation of the plot from the straight line should be concave upward because pm is expected to increase with stress. A deviation that is concave downward would instead suggest an influence of relativistic effects (Fig. 4).
The stress dependence of pm can be investigated by assuming that pm is proportional to (e/at)“‘, in
which case a plot of i vs x*‘+i should give for high a/&?? values a straight line extrapolating through the origin (for the correct exponent n’), Thus, with sufficient data, particularly at stresses greater than &??, the variation (if any) of the mobile dislocation density with mechanical threshold stress and with stress (or strain rate) can be investigated using equa- tions (32) and (33) and an assumed mobile dis- location density relation of the form
where p: is the mobile dislocation density of the reference state 7^O.
6. SUMMARY AND CONCLUSIONS
In this paper, we have investigated the transition from thermal activation to drag-controlled defor- mation that occurs when a constant structure is sub- jected to increasing stresses or strain rates. A simple model of dislocation behavior has enabled us to identify the important variables and their respective influence on the transition. The main results concern- ing the transition and the means of identifying the contribution of drag in experimental results are sum- marized below.
(i) The most important parameter to determine for a classification of operative mechanisms is the threshold stress f. It represents the maximum glide resistance to the dislocation motion provided by the obstacles in the structure. It can be measured by a suitable extrapolation to 0 IS of low-temperature, low-strain-rate probes of the yield stress of that structure.
(ii) The cont~bution of drag to the deformation may be non-negligible for applied stresses below ~5%. The stress ratio a/&?? at which the transition occurs (i.e. drag becomes dominant) depends strongly on the strain-rate sensitivity of the thermally activated pro- cess. However, for a stress exponent m = 300, corre- sponding to the constant-structure strain-rate sensi- tivity of many materials, it is unlikely that there is any significant contribution of drag for applied stresses lower than 0.9f.
(iii) The strain rate at which the transition occurs depends sensitively on the mobile dislocation density
Pill* (iv} For applied stresses above h%, drag con-
trols the deformation. At sufficiently high stresses (a > 1.5 a?), a linear plot of i vs a should yield a straight line extrapolating to or close to the origin. A deviation from a straight line suggests the super- position of another mechanism with dislocation drag. A deviation concave downward indicates the occurrence of relativistic effects, whereas a deviation upward indicates a variation of the mobile dis- location density with strain rate. In the latter case a plot of c? vs o/at raised to a small power should

REGAZZONI er al.: DISLOCATION KINETICS 2875
extrapolate through the origin and yield the stress dependence of P,,, at constant structure. Finally, a straight line that extrapolates to a positive stress
indicates a non-negligible energy-storage stress ?; it should be relatively small, typically less than a/30. A higher value would require unusually large strain- hardening rates.
(v) Observations on different structures (e.g. after different prestrains) can be combined by plotting i /r^ or i /? * vs 0 /z^ (if 4 is known; if not, any arbitrary but same scaling parameter can be used). This procedure may be used to extract the stress dependence of P,,, when strain varies.
(vi) When the drag is due to the interactions with phonons, which is the case except at very low temperatures, the influence of drag increases with temperature. Thus the partial derivative & /aT)a becomes negative when drag becomes the rate- controlling deformation mechanism.
9. G. Regazzoni and F. Montheillet, Mechanicalproperties of Materials at High Rates of Strain, Inst. Phys. Conf. Ser. 70, p. 63. Inst. Phys., Lond (1984).
10. J. D. Campbell and W. G. Fergusson, Phil. Mug. 21, 63 (1970).
11. J. Harding, J. Iron Steel Inst. 6, 425 (1972). 12. K. G. Hoge and A. K. Mukherjee, J. Mater. Sci. 12,
1666 (1977). 13. A. V. Granato, Metallurgical Efsects at High Strain
Rates (edited by R. W. Rohde, B. M. Butcher, J. R. Holland and C. H. Karnes), p. 255. Plenum Press, New York (1973).
14. D. Klahn, A. V. Mukherjee and J. E. Dorn, Second Int. Conf. On the Strength of Metals and Alloys, p. 95 I. Am. Sot. Metals, Metals Park. Ohio (1970).
15. H. J. Frost and M. F. Ashby,‘J. appi Phis. 42, 5273 (1971).
16. J. Buchar, Z. Bilek and F. DuSek, Mechanical Behavior of Metals at Extremely High Strain Rates. Trans. Tech., Switzerland (1986). -
17. R. J. Clifton, Shock Waves and the Mechanical Proper- ties of Solids, p. 73. Syracuse Univ. Press, New York (1971).
18. Finally, we again emphasize that the procedures
outlined in this review provide a framework for the 19.
analysis of experimental data obtained at constant
structure (and not at constant strain) either through the use of strain-rate-change tests or by measuring
20.
and holding steady some structure parameter. 21. 22.
Acknowledgements-This work has been performed under the auspices of the U.S. Department of Energy and was supported through its Division of Materials Sciences, Office 23. of Basic Energy Sciences. One of us (G.R.) would like to thank Los Alamos National Laboratory for support through the Postdoctoral Research Program.
24.
REFERENCES 25.
P. S. Follansbee, G. Regazzoni and U. F. Kocks, 26. Mechanical Properties of materials at High Rates of Strain, Inst. Phys. Conf. Ser. 70, p. 71. Institute Physics, 27. Lond (1984). A. Kumar, F. E. Hauser and J. E. Dorn, Acta metall. 16, 1189 (1968). F. E. Hauser, J. A. Simmons and J. E. Dorn, Response 28. of Metals to High Velocity Deformation (edited by P. G. Shewmon and V. F. Zackay), p. 93. Interscience, New York (1961). 29. W. G. Ferguson, F. E. Hauser and J. E. Dorn, Br. J. 30. appl. Phys. 18, 411 (1967). J. W. Edington, Phil. Mug. 19, 1189 (1969).
P. S. Follansbee, U. F. Kocks and G. Regazzoni, J. Phvsiaue 46. C5-25 (1985). U. F: Kbcks, A. S. Argon and M. F. Ashby, Thermo- dynamics and Kinetics of Slip, Prog. Mater. Sci. 19. Pergamon Press, Oxford (1975). R. J. Arsenault and J. C. M. Li, Phil. Mag. 16, 1307 (1967). R. B. Schwarz, Phys. Rev. B 21, 5617 (1980). J. Weertman, Metallurgical Effects at High Strain Rates (edited by R. W. Rohde, B. M. Butcher, J. R. Holland and C. H. Karnes), p. 319. Plenum Press, New York (1973). R. J. Clifton, A. Gilat and C.-H. Li, Material Behavior Under High Stress and Ultrahigh Loading Rates (edited by J. Mescall and V. Weiss), Sagamore Army Materials Research Conf. Proc. 29, p. 1. Plenum Press, New York (1983). A. V. Granato, Phys. Rev. B4, 2196 (1971). R. B. Schwarz and R. Labusch, J. appl. Phys. 49, 5174 (1978). R. B. Schwarz, R. V. Isaac and A. V. Granato. Phys. Rev. Lett. 8, 554 (1977). P. S. Follansbee, Metallurgical Applications of Shock- Wave and High-Strain Rate Phenomena (edited by L. E. Murr, K. P. Staudhammer and M. A. Meyers), p. 451, Marcel Dekker. New York (1986). P. S. Follansbee and G. T. Gray, Shock Waves in Condensed Matter (edited by Y. M. Gupta), p. 371. Plenum Press, New York (1986). K. Ishii, Phil. Mug. 33, 909 (1976). J. Shiori, K. Satoh and K. Nishimura, High Velocity Deformation of Solids (edited by K. Kawata and J.
6. M. Stelly and R. Dormeval, High Velocity Deformation Shioiri), p. 50. Springer, Berlin (1978).
31. of Solids (edited by K. Kawata and J. Shioiri), p. 82.
R. J. Clifton, J. appl. Mech. 50, 941 (1983).
Springer, Berlin (1978). 32. U. F. Kocks, Constitutive Equations in Plasticity (edited
7. A. Kumar and R. G. Kumble, J. appl. Phys. 60, 3475 by A. S. Argon), p. 81. MIT Press, Cambridge, Mass, (1975).
(1969). 8. R. Dormeval and M. Stelly, Mechanical Properties of
33. P. S. Follansbee, G. Regazzoni and U. F. Kocks, The
Materials at High Rates of Strain, Inst. Phys. Conf. Ser. Mechanics of Dislocations (edited by E. Aifantis and
97, p. 15. Inst. Phys., Lond (1979). J. P. Hirth), p. 237. Am. Sot. Metals. Metals Park, Ohio (1985).