Embed Size (px)
Citation preview

2-1
To appear in NATO/AGARD Lecture Series 200 on Knowledge-Based Functions in Aerospace Mission Systems,November 6-17 1995.
Distributed, Collaborative, Knowledge Based Air Campaign Planning
Mark T. MayburyBedford Artificial Intelligence Center
Advanced Information Systems Technology DepartmentThe MITRE Corporation
Mail Stop K331, 202 Burlington RoadBedford, MA 01730-1420 USA
Tel: (617) 271-7230Fax: (617) 271-2352
E-mail: [email protected]
SUMMARYThis paper addresses existing functional needs and currenttechnical opportunities for intelligent automation tosupport air campaign and theater level planning. In thecontext of a changing political, military, and acquisitionenvironment, we describe several advanced automationactivities that address key shortfalls in situationassessment, force planning, and legacy systems integration.First we describe a joint Air Force Electronic SystemsCenter (ESC)/MITRE Corporation effort to deal with the“legacy” problem of integrating intelligence and missionplanning systems using a common object request brokerarchitecture to enhance intelligence/operations interactionsand support evolvable systems in the field. We thendescribe results from a joint Advanced Projects ResearchAgency (ARPA) and Rome Laboratory (RL) initiativeaimed at developing the next generation of distributed,collaborative force deployment and force employmentplanning technology. We then describe anotherESC/MITRE effort to develop tools for multisourceintelligence integration to support knowledge based,multisensor data fusion and enemy behavior recognition forenhanced situation assessment. Given this context, wethen illustrate an integrated vision of a distributedcollaborative, knowledge based crisis action planningsystem, where both machine and human knowledge areutilized synergistically to enhance overall systemperformance. We summarize lessons learned from theseefforts and discuss an evolutionary acquisition process tomove the above ideas toward operational realization whileminimizing technology transition risk. The articleconcludes with recommendations for moving forward.
1. INTRODUCTIONUnited States national security policy states a requirement"in concert with regional allies, to win two nearlysimultaneous major regional conflicts" [1]. Supportingthis objective requires a revolutionary approach to joint andcoalition doctrine as well as significant advances insupporting Command Control Communications and
Intelligence (C4I) infrastructure. Of critical importance tosustain the initiative in warfare is our ability to stay insidethe enemy's planning cycle time. While we areincreasingly able to work in concert with our allies at apolitical level to control the proliferation of weapons ofmass destruction and to promote stability and democracy,in battle we remain limited in our ability to shareinformation and collaborate using an electronic informationinfrastructure.
This article highlights recent technology developments andnovel acquisition strategies that attempt to address thisneed. It emphasizes future distributed mission planningand execution infrastructure which can be used tocollaboratively plan air campaigns. While the primaryfocus here is on joint US systems and in particular forcedeployment and employment, lessons learned may betransferable to coalition activities.
2. PROBLEMSupporting the US national security strategy of enlargingthe global village of free market economies, Americantroops operated in nearly every country in the world in1994. For example, in the Air Force:
We delivered 75,000 tons of relief supplies to Bosnia,15,000 tons to Rwanda and Zaire; supported majordeployments to Haiti and Kuwait; and conductedhundreds of operations in such far-ranging places asYemen and Johnston Atoll ... We’ve flown nearly10,000 sorties in Bosnia. In the Gulf we’ve launchedthree times the missions of Desert Storm. Within 10days of Iraq’s provocation this Fall, 160 combataircraft joined the 140 already deploy there, and we hadflown 1,000 sorties ... We’ve exercised with 50nations since last December. [2].
These activities underscore the multifaceted nature ofmodern military operations, spanning tradition roles todefend against, deter, damage/disable, or destroy enemythreat as well as to engage in combat operations other thanwar, including relief missions and non-combatantevacuation operations.
Desert Storm illustrated the effective application ofcoalition air power, stealth technology, precision-guidedmunitions, and C4I to achieve decisive victory. Despitethis success, lessons learned suggest a clear need for a moreintegrated view of the battlefield to better perform situationassessment, more timely and accurate force deployment andemployment, and a more efficient information systemsinfrastructure to enable rapid plug-and-play of capabilities.
Finally, guidance from Secretary of Defense William Perryemphasizes the use of standards to promoteinteroperability, Commercial Off the Shelf (COTS)solutions to reduce costs, and joint infrastructure andarchitecture. Important capabilities are now fielded such asthe commercially-based Joint Worldwide IntelligenceCommunications System (JWICS) which providesinterservice video, voice, and data connectivity, and the

2-2
Joint Deployable Intelligence Support System (JDISS), aDODIIS core project which provides the JTF commanderwith a common UNIX-workstation suite (e.g., e-mail, filetransfer, remote access, imagery). While the move towardCOTS provides important functional and economicadvantages, it is not without risk. In addition tomarketplace volatility, experience suggests that effectiveCOTS integration requires detailed knowledge of and accessto internal and potentially proprietary source code.Furthermore, there remain functional gaps between desiredconcepts of operations and government and/or COTSsystems as well as serious interoperability problems withexisting and projected operational support systems.Crucial to a successful information infrastructure is a wellarticulated target architecture as we move toward a GlobalCommand and Control System (GCCS).
AIR CAMPAIGN PLAN &MASTER ATTACK PLAN
THEATER MILITARYOBJECTIVES
JOINT AIR COMPONENTOBJECTIVES TO
SUPPORT OVERALLCINC CONCEPTOF OPERATIONS
NATIONAL INTERESTS AND NATIONAL
MILITARY STRATEGY
POLITICAL OBJECTIVES
NCA
THEATERCINC ORJTF CDR
JFACC(and JFLCC,
JFMCC, JFSOCC)
FLYING WING
AIR TASKING ORDER
FEEDBACK/BDA
EXECUTE MISSIONS
WING MISSION PLANS
ACPT
AFWCCSAFMSS
CTAPS
Figure 1. Battle Planning Process
In the remainder of this article we first outline the promiseof distributed object computing technology and how this isbeing exploited to improve future theater level missionplanning systems. We then point to innovative jointdevelopments for new distributed, collaborative, knowledgebased planning aids at the air campaign level. As Figure 1illustrates, we focus on current theater level automationsystems first, in particular the Air Force's ContingencyTheater Automated Planning System (CTAPS). Wesubsequently turn our attention to future air campaign levelautomation such as the Air Campaign Planning Tool(ACPT) which produces an overall air campaign plan and adaily Master Attack Plans (MAPs), a potential future inputto CTAPs. We do not directly address mission levelautomation systems such as the Air Force World WideCommand and Control System (AFWWCCS), throughwhich Air Force Wings receive Air Tasking Orders (ATOs)
from CTAPS, nor the Air Force Mission Support System(AFMSS), which is used by air crews for tactical missionplanning.
3. CTAPSFor many reasons, including changing threats, doctrine,concept of operations, and resources, many large systemsare procured to function independently only to discover afuture need to interoperate. Figure 1 illustrates CTAPS, acomplex, system of systems indicative of the currentcomplexity of theater level infrastructure. For Air Forcetheater-level battle management, CTAPs is at the heart ofthe cycle of situation monitoring, diagnosis, plangeneration, plan selection, and plan execution, asarticulated by NATO AGARD Working Group 11 [3].CTAPS contains approximately two and one half millionslines of source code encompassing multiple missionfunctions (from situation assessment to weaponeering tobattle planning), software applications (e.g., heterogeneousdatabases, human computer interfaces), and programminglanguages (e.g., C, C++, Ada, SQL, Pro C).
STOMPS
ACMJMPP
AUTODIN
JANAP128
mesg:USMTF,
ASCIItextJANAP128
mesg:
USMTF,ASCII
text
CSP
Mesg:USMTF
IMOM
REM
JOTS BASS
CIDB
ICM
CAFWSP
CTAPSRemote
ADS
RAAP
JMEMWO;Cmd
ATO; USMTF
CMS
CMS
WCCSData;
USMTF
WCCS Data;JQL
WCCS Data;SQL
WCCS
JDSS
TACREP,ABSTATACSAMSTAT;USMTF - X.25
ATO, ACO;
USMTF - X.25
ATO Data;SQL
ACO Data;SQL
IPL
OB; IDBTF
Stored Procedures; SQL
INTEL mesg;USMTF, ASCII text
TNL, WO; IDBTF
IDBTF
ParserLoader
SQL
IDBTF
TNL, WO;IDBTF
SQL
SQL
SQL
SQL
SQL
ATO SQL
WX Data; ASCII text
ATO; SQL
SQL
Logistics Data; SQL
ACO; USMTF
ACO; Text
ACO; Text
EOB; SQL
ATO; USMTF
SB, CS
WX Data;ASCII text - AWN
UGDF
ATO;USMTF - X.25
SQL
UFLINKCI
CMP
UMSG
APSCAFMS
JMAPS
Figure 2. CTAPS Architecture
ESC and The MITRE Corporation in a Mission OrientedInvestigation and Experimentation (MOIE) project [4, 5]are examining the integration of legacy CTAPS systemsvia coarse encapsulation of application objects using theCommon Object Request Broker Architecture (CORBA),described below. The motivation is not only to consolidateexisting systems in order to reduce cost, increaseinformation consistency, and improve responsiveness. It isalso to establish a computational framework which willenable rapid migration to new requirements and systems,including some of the advanced distributed campaignplanning tools outlined in the next section.
As highlighted in Figure 2 , MITRE has experimentedwith the ease and utility of the CORBA integration of threeCTAPS subsystems: the Computer Assisted ForceManagement System (CAFMS), Advanced PlanningSystem (APS), and Joint Message Analysis andPreparation System (JMAPS), together which constitute ahalf million lines of source code. Currently theseapplications are coarsely encapsulated using IONATechnologies’ Orbix environment as individual applicationobjects, that is there exists a CAFMS object, an APSobject, a JMAPS object. Future work will addressintegrating individual functions and data within these

2-3
systems, for example, supporting interaction with amission plan object or an enemy threat object.
3.1 CORBA and CTAPSThe Object Management Group (OMG), formed in 1989, isa consortia of over 500 member companies including themajor software system vendors (e.g., Apple, IBM, Digital,Hewlett-Packard, Microsoft, and SunSoft, on whoseoperating system CTAPS runs) and large end-userorganizations which aim to support interoperable softwarecomponents in heterogeneous environments via thedevelopment of standard interfaces and supportinginfrastructure. Their resultant reference architecture is basedon objects which have associated operations. It furtherdistinguishes object services such as the generalmanagement of objects (e.g., their creation, deletion,naming, copying, querying, modification), from commonfacilities (e.g., object browsers, user interface components,mail, print spoolers, spelling checkers, help facilities)which may be reused in multiple applications, fromapplication objects, which would be custom to a particulardomain.
An Object Request Broker (ORB) acts as a communicationsinfrastructure to route messages between objects in amanner independent of the language, platform, andnetworking protocol local to any object. An InterfaceDefinition Language (IDL) is used by object developers todefine the language-independent interface to an object typeand an Interface Repository acts as a database of objectinterface definitions as well as data types, constants, andexceptions. A Dynamic Invocation Interface enables aclient, at run-time, to invoke an arbitrary operation on anarbitrary type of object. Inter-ORB protocols were adoptedin December 1994, most importantly, the Internet Inter-ORB Protocol for interoperation among ORBs via TCP/IP.Forthcoming extensions will include mappings from IDLto additional languages beyond C, C++, and Smalltalk(e.g., Ada9X, COBOL, LISP, Objective-C).
Figure 3 outlines the Object Request Broker architecture asapplied to CTAPS. Object Services are similar to thosefound in the general CORBA model, however, facilitiesinclude both general items (e.g., system administration, e-mail, talk) as well as ones particular to military operations(e.g., message processing, alerting, mapping). In contrast,application objects are unique to theater level missionplanning (e.g., theater intelligence, air tasking orderplanning, weaponeering).
MITRE wrote IDL interfaces and implemented CORBAfront-ends for JMAPS, CAFMS, and APS. For example,via ORB invocations, the APS application can be invokedand exited, with or without a map, and the APS data exportapplication can be invoked. Once an Air Tasking Order(ATO) is prepared in CAFMS, the JMAPS ATO Checkfunction can be invoked via the ORB, which passes theATO message as input to JMAPS and receives an errorreport as output, also via the ORB. These CORBA front-ends represent encapsulations of applications withcommand-line (APS and CAFMS) and remote procedurecall programming interfaces.
JMAPS (ATO Valid.)CAFMS (ATO Prep.)APS (Planning)ICM (Intel Analysis)JMEM (Weaponeering)RAAP (Targeteering)
LifecycleNamingEvent notificationPersistanceRelationshipsExternalizationTransactionsConcurrency Control
Application Objects Common Facilities
Object Services
System Message AlertsJAMPS (USMTF Msg)CMS/CMSTK (GIS)Electronic MailSystem AdminTalk
SecuritySynchronizationLicensingQueryPropertiesTradingChange ManagementData Interchange
Object Request Broker (ORB)
Figure 3. CTAPS ORB Architecture
The ORB also can act as an intermediary not only toapplications but also to data. For example, MITRE wroteIDL interfaces and developed a CORBA front-end forrelational database management systems. This wasspecialized to access Oracle. MITRE then developed afront-end based on Mosaic software from the NationalCenter for Supercomputing Applications. This front endsupports direct access through an ORB interface to APSand CAFMS databases.
3.2 Lessons LearnedWrapping existing legacy systems by defining andimplementing CORBA interfaces provides a powerfulmethod for systems migration. Coarse encapsulation oflegacy systems using CORBA does not require access tothe source legacy code, provided sufficient knowledge ofhigh level interfaces. Indeed, it is application architectureknowledge (components, their functions, characteristics,operating assumptions, and interactions) that required themost amount of resources in the above experiment. Infact, the source code to develop the Orbix IDL definitions,servers, human computer interface and utility functions forAPS, CAFMS, and JMAPS totaled only 2,617 lines ofcode (contrast this with the half million lines of coderepresented by those applications). With object-orientedaccess to legacy system data and functionality, we have thepossibility of moving up the planning systems supporthierarchy shown in Figure 1 toward distributed,collaborative planning tools as shown in Figure 1. Weturn to these next.
4. AIR CAMPAIGN PLANNINGFigure 4 provides a more detailed view of the levels,inputs, decisions, and activities from campaign planning toexecution [3]. Just as the wing and flight level operationsrequire detailed intelligence about terrain, weapons, threatsand weather to plan an effective mission, theater andcampaign level planners require tools to support situationassessment, course of action development, evaluation, andselection. In this section we will describe several systemsthat support deployment and employment planning.

2-4
Analyze Situation
Mission
Determine Objective
Select
Course of Action
AirOperations
Campaign
Campaign Plan
National GoalsPolicy & Guidance
Air Objectivese.g.• Destroy Enemy AF • Defend Airspace • Support Army Ops
Etc.
Air Operations Planse.g.• Air Superiority Plan • Air Defense Plan • Air Interdiction Plan • CAS Plan, Etc.
Military GoalsPolicy & GuidanceAssets & Vulnerabilites
Problem Definition
IntelligenceRegional Information
Analyze Situation
Determine Objective
Select Course of Action
Air Operations Plan
Operational Objectives
e.g.• Destroy XYZ AB • Defend Friendly AB • CAS Alert, Etc.
Air Battle Planse.g.• 4 x F-111 to Tgt nn • 8 x F-15C to CAP •12 x A-10 15 min
.
Air ObjectivesPolicy & GuidanceResources & Threats
Problem Definition
Analyze Situation
Determine Objective
Select Course of Action
Mission Plan
Commander's GoalsROE & SPINS
Mission Objectivese.g.• Find Target • Attack Target • Return Safely, Etc.
Tactical Planse.g.•Low Alt Ingress • Radar Search • Standoff Attack • Low Alt Egress, Etc.
Mission GoalsPolicy & GuidanceResources & Threats
Problem Definition
Mission IntelligenceTarget Area InformationWeather
Military IntelligenceRegional Information
Theater GoalsConstraints & Guidance
Air ObjectivesMaster Attack Plan
Mission Orders
Engagement Plan Execution
CommandHeadquarters
CommandCenter
Combat GroupFormation
Individual CombatantsAircraft
G & C Commands
Defeat Enemy Military Forces
Degrade EnemyAir Defense System
Bomb Target with PGM
Figure 4. Air Campaign Planning Process [3]
4.1 ARPA/RL Planning InitiativeThe joint Advanced Research Program Agency (ARPA) andRome Laboratory (RL) Knowledge based Planning andScheduling Initiative (ARPI) is aimed at developing thenext generation of distributed, collaborative planning tools[6]. ARPI takes a multi-tiered approach to developmentvia problem focused basic research which flows intoIntegrated Feasibility Demonstrations (IFD) which thenflow into Advanced Capability Technology Demonstrations(ACTDs) which in some instances are fieldablecapabilities. Formal “exit” criteria and “final exams” serveas functional evaluations at each step in the process.
IFD-1 consisted of the Dynamic Analysis and ReplanningTool (DART), which was used by transportation plannersto manipulate Time Phased Force and Deployment Data(TPFDD). This included the TPFDD Editor (TPEDIT), atemporal constraint-based tool used to construct and edit theelements and temporal aspects of the TPFDD. TPFDDsconsist of many unit line number (ULN) records. Figure 5shows a sample ULN for a US Army air defense artillerybattery of Patriot missiles originating from HCRL onC000 (estimated), embarking at NKAK on C010(estimated), with a destination of JEAH between CO11 andC015 (estimated). Built by a team that integrated end usersand technologists, operational folks found DARTconstruction, analysis, and interface showing transportationphasing and feasibility extremely useful. It was claimed a
major success in its use for transportation planning duringDesert Storm [6].
((ULN "U-0AADA ")(PROVORG "7") (SERVICE "A")(UTC "1HM77") (ULC "BTY")(DESC "ADA BTRY,PATRIOT (MISSLES)")(FIC "8") (PIC " ") (BULK "0000000")(OVER "0000450") (OUT "0000000")(NONAIR "0000000") (ORIGIN "HCRL")(RLD "C002") (POE "NKAK")(ALD "C010") (EDD "C000")(POD "JEAH") (EAD "C011")(LAD "C015") (PRIORITY "002")(DEST "JEAH") (RDD "C015")(SEQNBR "00000") (CEI " "))
Figure 5. Sample ULN record from TPFDD database
IFD-2 developed a complex knowledge based planning tool,the SIPE-II Operational Crisis Action Planner (SOCAP).SOCAP consisted of a set of planning operators thatspecified a taxonomy of military actions (e.g., deploy aunit, perform a mission, allocate a route) each of whichachieve particular goals. Each action had associatedresource, temporal, and activity constraints. Given a high-level operational objectives, SOCAP could generate anhierarchical plan of air campaign actions.
PHANP09941
DEPLOYEDN0977
Orangeland
PROCP0995DCA
N0977AIR-Purpleland
PROCP09911
SETUP-BASSOrangeland
COA-1
PROCP0993CAP
N0978N0972
GOALP0992
DEPLOYEDN0978
Orangeland
JC0990
S00989
Figure 6. Segment of SOCAP Plan
Figure 6 shows a portion of a partially planned SOCAPcourse of action to defend territorial integrity. In Figure 6,triangles indicate the start or completion of parallel actions,squares and hexagons indicate processes and goals whichrequire further refinement, and octagons indicate processes(with associated actions, resources, and results). Thus, thepartial plan in Figure 6 consists of three parallel steps(from bottom to top):
1. Setting up a base at Orangeland.2. Deploying tactical fighter forces N0978 (a yet
unspecified unit) at Orangeland, followed by aCombat Air Patrol (CAP) performed by N0978 andN0972

2-5
3. Deploying tactical fighter forces N0977 forDefensive Counter Air (DCA) in Purpleland,followed by a CAP performed by N0977.
This plan portion could be further refined and/or replannedto achieve higher level goals.
Detailed courses of action are generated by SOCAP byreasoning about goals and detailed action specifications.For example, the tactical airlift operator used to planmoving force1 from airfield1 to airfield2 is:
OPERATOR: move-by-tairlift ARGUMENTS: army1-with-size<10000,
airfield1-with-runway>500,airfield2-with-runway>500, tairlift1, tfighter1, air-loc1;
PRECONDITION: (route-aloc airfield1 airfield2 air-loc1); PURPOSE: (moved army1 airfield1 airfield2); PLOT:
GOAL: (located tairlift1 airfield1);PROCESSACTION: move-tairlift;ARGUMENTS: army1, airfield1, airfield2, tairlift1;RESOURCES: tairlift1;EFFECTS: (moved army1 airfield1 airfield2);
END PLOTEND OPERATOR
This detailed plan specifies the context of a successfultactical airlift. For example, the preconditions forsuccessful application of this plan dictate that force1 mustbe smaller than 10000 tons, airfield1 and airfield2 musthave runways longer than 500 feet, and there must be an aircorridor between airfield1 and airfield2. The purpose of theact is to move army1 from airfield1 to airfield2. SOCAPdemonstrated the feasibility of deliberative planning,although operational users had difficulty understandingPERT-like views of hierarchical plans (as in Figure 6) asopposed to GANTT-chart like views. A more completelibrary of plan operators needs to be constructed to dealwith a variety of operational courses of action.
4.2 TARGET and ForMATTheater Analysis, Replanning and Graphical ExecutionToolbox (TARGET) was developed and demonstratedduring IFD-3. TARGET as well as other ARPI technologywas demonstrated daily at the Joint Warrior InteroperabilityDemonstration (JWID '94), a Joint Staff sponsored annualforum focused on C4I concepts, technologies, and systems[7]. The demonstration backbone was the TheaterAnalysis, Replanning and Graphical Execution Toolbox(TARGET) which provides such capabilities as sharedplans, video, voice, maps, briefings and pointers. JWID'94 was used to demonstrate collaborative disaster reliefplanning in Hawaii at US CINCPAC and combatoperations at USACOM and the Air Combat Command.TARGET includes a shared set of planning tools whichenable users to jointly assess transportation feasibility,cost, casualties, and time associated with alternate coursesof action (COA). In the relief scenario, a Combined JTFwas simulated from NRaD in San Diego who interactedwith surrogate members from Army Materiel Commandand Defense Logistics Agency. Logistics, weather, anddisaster anchor desks were provided on Oahu.
Functionally, the planning tools enable crisis actionmembers to rapidly produce Time Phased Force andDeployment Data (TPFDD), validate feasibility, visualizeresults on the Geographical Logistics Awareness Display(GLAD), obtain critical situation information from anchordesks, select a final course of action, and transmit this tothe theater commander.
A crucial aspect to this process is selecting and supportingfeasible courses of action (COAs). The Force ModuleAnalysis and Management Tool (ForMAT) [8] wasdeveloped originally for deployment planners at CINCs tobuild the deployment plans for selected COAs. It iscurrently being explored for use as an adaptive ForcePackage editing tool and for supporting ServiceComponents in force generation and selection. ForMAT iscurrently populated with 322 cases derived from 17TPFDDs where each case contains elements from 47possible attribute value pairs.
Using case based reasoning techniques developed forSMARTplan [9], the system is able to index, retrieve,support modification and visualize a database of TPFDDsbased on high level specifications of force requirements(e.g., service=Army AND capability=anti-tank). Figure 7illustrates a joint force created using ForMAT.
Figure 7. ForMAT Joint Force Structures
ForMAT represents a dramatic improvement both in thequality and speed of developing Operational Plans(OPLANs), which specify where and when forces involvedin a mission are to be moved. This previously was acumbersome process. Significantly, a “small” plan caninvolve specifying 10,000 distinct force requirements, alarge one as many as 200,000, all of which much bescheduled. By matching desired requirements to similarpreviously stored solutions in the case base, prohibitivecomputations can be avoided. A user can query for an exactmatch to a force need (e.g., function=military-police ANDservice=air-force) and obtain a rank-ordered list or if thereare few or no results, then the user can issue a “general”search which walks up a generalization hierarchy associatedwith search terms to broaden the search (e.g.,function=security AND service=air-force). Instead ofquerying the existing case base, the user can choose from“template force modules” to describe a generic forcepackage (e.g., a small, medium, or large sized MarineExpeditionary Unit).
At JWID-94, ForMAT successfully received forcerequirements from TARGET and generated lists of

2-6
satisfying forces. For example, after a mission planningsession, TARGET would pass force requirements toForMAT such as:
MISSION = DESERT-BLASTTHEATER = PACOMGEOGRAPHICAL-LOCATION = KOREAFUNCTION = MISSION-AIRCRAFTSERVICE = AIR-FORCEDEST-CC = WORLDUIC = “WALOAA”
ForMAT would then retrieve a set of Force Modulesprioritized by the degree to which they satisfied theseindividual and cumulative requirements. The Force Modulefunctionality of ForMAT will be combined with thecreation and editing functionality of TPEDIT and foldedinto the Global Command and Control System (GCCS).In addition to ensuring transportation feasibility, designingthe campaign in the first place is a critical success factor towhich we now turn.
4.3 Air Campaign Planning ToolCurrent ARPI focus is on tools to support air campaignplanning, in part a result of the success of the AirCampaign Planning Tool (ACPT) [10, 11], softwaredeveloped for the USAF/XO and the “Checkmate” divisiontherein by ARPA and the ISX Corporation. ACPTcaptures the process utilized during Desert Storm to helpthe Joint Force Air Component Commander (JFACC) andhis staff rapidly build a high quality air campaign plan.
Led by Lt. General Buster Glosson, a staff ofUSAF planners developed a strategic planfavoring the application of precision munitionsagainst carefully selected “centers of gravity” tomaximize the effect of limited force application,avoiding “mass-on-mass” application of force.[11]
Figure 8 illustrates a high level view of ACPT whichindicates inputs, outputs, tools, and existing andenvisioned interactions with external systems. ACPThelps the JFACC and his staff to:
- Perform situation assessment- Specify campaign objectives- Develop Courses of Action (COAs)- Identify target Centers of Gravity (COG)- Allocate resources- Assess plan feasibility and effectiveness
For example, Figure 9 shows a screen dump in which anair campaign planner is specifying, refining, and satisfyingan overall COA by selecting an action (in this case“attack”), an associated effect (“disrupt”), and COG.
FORCEDEPLOYMENTMODEL (DART)
FORCEAPPLICATION
MODEL (CTEMS)
INTELLIGENCEDATA BASE
(CONSTANTWEB)
ATTRITIONANALYSIS
MODEL(EADSIM)
ACPTACPT
• NATIONAL INTERESTS /OBJECTIVES• REGIONAL POLITICAL OBJECTIVES
•CINC’S MILITARY OBJECTIVES•OPERATIONAL THEATER VISION
(IDEALLY, THESE INPUTS PROVIDEDBY HIGHER AUTHORITY;IF NOT, USER DEFINES
IN ACPT)
•OPERATIONAL AIR OBJECTIVES• TACTICAL COURSES OF ACTION
•TARGET TO OBJECTIVE AUDIT TRAIL•FORCE STRUCTURE REQUIRED
•DEPLOYMENT SCHEDULE•MASTER ATTACK PLAN (MAP)*
*MASTER ATTACK PLANINCLUDES PRIORITIZEDTARGET LIST WITH FORCE
PACKAGE AND WEAPON INFORMATION.
FRIENDLY SITUATIONUPDATES THROUGH:• WWMCCS• AFWCCS• CTAPS• MESSAGE TRAFFIC
REAL TIME INTELSITUATION UPDATES:• ENEMYGND/AIR OB• ELECTRONIC OB• IMAGERY DIRECT FROM SOURCE
SYSTEMMANAGEMENT
TOOLS
SCENARIODEVELOPMENT
TOOLS
GEOGRAPHICUSER
INTERFACEAND
TOOL KIT
OBJECTIVEDEVELOPMENT
TOOLS
SITUATIONANALYSIS
TOOLS
WORKING ATTACK PLANDEVELOPMENT TOOLS
Figure 8. Air Campaign Planning Tool (ACPT) [11]
Figure 9. ACPT Assisting COA/COG Development[11]
Figure 10 shows the planner then selecting a target (e.g.,all radar within 50 miles of a location) and exploring forcerequirements for particular COAs.
ACPT has the advantage that planners can build campaignplans during peacetime as well as during crisis, thustraining with what they will fight. The high valueapplication and access to a core set of experts were crucialto the success and continued daily use of ACPT.
Air campaign planning functions may be integrated intofuture versions of CTAPS for use at the Air OperationsCenter (AOC) level. Links between ACPT and CTAPSfunctions, as well as databases adequate to serve allapplications, are challenges yet to be resolved.
4.4 ConclusionJWID evaluations [7] of the above tools showed primaryproblems to be network capacity and reliability as opposedto functionality. Tools that are to effectively support thecomplex cognitive functions of analysis and planning neednot only be intuitive, they also require detailed knowledgeof war fighting, a rich taxonomy of courses of action, andan ability to intelligently guide and support the planner.“Building in” knowledge acquisition to the process ofcampaign planning or force module retrieval/modificationcan ease the brittleness and cost of these tools, althoughcapturing and representing situation/political context willremain difficult.

2-7
Figure 10. Target Selection and Force Requirements [11]
Finally, experience in ARPI underscores the power of userdriven software development. Users are more likely to takea personal stake in the resulting systems they haveinfluence over, and there is a higher likelihood of realincreases in operational performance resulting in reducedcosts and improved readiness given strong focus on actualproblem areas.
5. INFORMATION FUSIONKnowledge of what you can do is only as good asknowledge of what you should do. Understanding theenemy or threat is crucial to plan selection. Oftencommanders have either too many minute pieces ofinformation or too much general information from whichcrucial nuggets could be mined (e.g., open source).Moreover, as in the CTAPs system, multiple, separatelydeveloped systems can yield incomplete, inconsistent oreven an incorrect view of the battlefield. In a separateMOIE effort called Multisource Intelligence Integration andAnalysis (MSIIA) [12], The MITRE Corporation inconcert with ESC has been investigating tools to assist theintelligence analyst in culling out a cohesive tacticalpicture of the battlefield.
The Joint Directors of Laboratories Data Fusion Subpanel[13] have developed a four-level generalized processingmodel that provides a common reference for discussing datafusion systems. The lowest level, Level 1, is representedby sensor-to-sensor correlation technologies and outputproducts such as an estimate of an object's position andidentity. At Level 2, logical processes use objectinformation, order-of-battle, and environmental data todetermine patterns and produce an assessment of the currenthostile or friendly military situation. Products from Level3 estimate the threat's capability and intent, and anemerging Level 4 addresses collection management. Anumber of sensor fusion systems are emerging in theintelligence area; however, they are limited in the number
of sensors they process or their level of reasoning. A goodexample of this is the Extended Intelligence SupportTerminal (X-IST) being developed for the Navy. X-ISTcorrelates SIGINT and provides graphical representations oftracks on DMA raster maps. Because of the lack of vectormap data, X-IST cannot reason about map features. X-ISThas a video window and can manipulate softcopy imageryin another software application. However, the imagery isnot linked to the maps or SIGINT. While X-IST is verypowerful and innovative, it principally performs Level 1fusion of a single source (SIGINT). It lacks an underlyingdatabase architecture for reasoning across sensors and wasnot designed to link different data sources within a commoncontext.
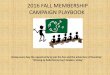
5.1 MSIIAAn intelligence analyst who directly supports a decisionmaker in strategic, tactical, or mission planning, producesa report by assembling information from analysts inimagery, signals, and other areas of intelligence. For eachsensor domain, there are specialized intelligence analystswho are experienced in interpreting sensor reports. It is theresponsibility of the decision-oriented analyst to determinethe impact of the information coming from the differentintelligence sources. The MSIIA Project [12] isdeveloping a workstation environment that enables adecision-oriented analyst to view, manage, and analyzethese sources of information and, simultaneously, conferwith specialized analysts. This system integrates radarsensor intelligence (RADINT), imagery (IMINT), signalintelligence (SIGINT), electronic map products, andintelligence order-of-battle databases. Because of disparateintelligence sources displayed in a common geographiccontext, the decision-oriented analyst can examine datacollected over time and collaborate with specialists aboutthe relationship between events detected by differentsensors. Figure 11 presents a view of the MSIIA dataspace and associated situation assessment functions forintegrating JSTARS Moving-Target-Indicator Radar, fusedSIGINT, IMINT and Geographic Information SystemsData.
TransportationMaps
ElevationModels
NRTImagery
Track/TargetData
MTI RadarData
2/25/18zTEL 678
2/24/16zTEL 678
2/24/00zTEL 99
Map data used todetermine likely routes, sites
Assess cued imagery toconfirm hypothesis
Candidate targets, sites
Coordinates of moving objects
JSTARSGISIMINTFUSED
UTILITYDATASOURCE
Figure 11. Multisource Information Integration
The MSIIA system combines Joint Surveillance TargetAttack Radar System (Joint STARS) Moving TargetIndicator Radar (MTI), SIGINT, Defense Mapping Agency(DMA) electronic map products, a variation of the DefenseIntelligence Agency's Integrated Database, commercialsatellite imagery, and near-real time reconnaissance

2-8
imagery. A central component of this system is acommercial geographic information system, which is usedto manage and display the data in a geographicallyregistered framework.
5.2 Multi-Source Analysis and FusionThe main goal of any information analysis and fusionsystem in the domain of military intelligence is tocombine the available data on a specified area of interest toachieve the best possible estimate of the objects, theirgroupings, movements and activities. The ultimate goal ofthis activity is to enhanced situation understanding thatwill facilitate a more appropriate utilization of assets (e.g.,to prioritize intelligence collection, to guide campaignplanning). To exploit disparate sensor and reportingsystem information over a varied spatial/temporal region,several reasoning mechanisms must be employed, whetherby human or machine.
The problem of intelligence analysis and fusion on theMSIIA project is exacerbated by the diversity of sensor andinformation types brought together in a single, integratedanalysis environment. Since there are more sources ofinformation, more information can be gleaned from it, butonly if the proper reasoning mechanisms are applied. Datacomes in snapshots of a continually changing world.These snapshots contain different pieces of the overallpuzzle. Additionally these snapshots are generated attemporally disjoint epochs. What this means is that all thesensor information available on an object is not view ableat the same spatial-temporal interval. This is caused bytwo phenomena. First, sensors (with the exception ofJoint STARS) rarely have continuous coverage; therefore,information is gathered at discrete time intervals. Thesecond reason is that most types of information are notbeing generated continually. Most objects are not going tobe communicating, radar or infrared emitting, or movingcontinually. Thus, in most cases, the only timeinformation is actually gathered is when the sensor islooking and the object is generating the proper signal.
Most data used by the MSIIA workstation will be receivedas point temporal data or spatial-temporal track data. Thatis, data pertaining to a specific sensor event will be taggedwith a discrete time and geo-spatial location, essentially asnapshot. This information, however, limits the amountof reasoning that can be done since most objects of interestdo not stand still. What this implies is that to fuse thevarious sensor events, reasoning about what is happeningbetween all the snapshots is required.
5.3 Overview of the Fusion AlgorithmsThe MSIIA fusion mechanisms are implemented on anetwork of Sun UNIX workstations that house a Sybaserelational database, ArcInfo Geographic InformationSystem (GIS), and ProKappa knowledge engineeringenvironment. All reasoning mechanisms are currentlyimplemented in ProKappa and knowledge is represented inframes.
The knowledge based fusion process uses a constraint basedreasoning model that mimics the process by which ahuman analyst would approach the fusion process. Thisapproach has the advantage of allowing for explanation
capabilities that can be related to the users reasoningprocess. There are two distinct sets of constraints that needto be satisfied in order to fuse disparate pieces of sensorinformation. The first constraint is that of theclassification of objects. In order for two pieces ofsensor/source information to be fused, they must be aboutthe same type of object. This set of constraint satisfactionis achieved by explicit representation of the possibleobjects a piece of information could be on the “possible-object” slot of the individual sensor/source objects. Figure12 presents an illustration of this representation wheresensor events are shown inheriting attributes from activitytype objects and sensor type objects. The bottom of thefigure illustrates a particular instance of a sensor event withassociated event type, date, time, location, type of objectrecognized and so on.
action_events
fused_actions
collector_events
events
Anon945(fused_actions)@MSIIA
RadarEmit
MissileLaunch
communication
movement
HUMINT
IIRELINT
Anon918(ELINT, RadarEmit)Anon930(ELINT, RadarEmit)
Anon910(ELINT, Communication)Anon911(ELINT, Communication)
Anon917(ELINT, Communication)Anon928(ELINT, Communication)Anon929(ELINT, Communication)
Activity Class DateTime ELINTNot Lat Long MajorAxis MinorAxis com V 02/12/92 06:01:42 sb23a1 30.409 43.411 63.23 23.4
Anon904(MTI, Movement)Anon905(MTI, Movement)Anon906(MTI, Movement)
Anon931(ELINT, Communication)Anon930(ELINT, Communication)
Anon929(ELINT, Communication)
Figure 12. Sensor-/Source Object Hierarchy
Classification constraint satisfaction is accomplished bycomparing the possible objects that all candidatesensor/source events can be with all other candidates. Theresult of this process is a set of objects that can beuniquely related to each other based on classification. Witha set of objects that can be related by classification a secondset of constraints that related to the relationships on theobjects in space and time needs to be satisfied. Spatial-temporal reasoning is the process of analyzing objects inspace and time. This is inherently difficult given thecomplexity of the MSIIA data space combined with theproblems with representing temporal data in a twodimensional geographic space. Being able to maintainspatial-temporal relationships is a cognitively demandingtask in volatile domains such as MSIIA’s. Technically,implementing this type of capability is difficult sinceconventional relational database technology does notsupport complex spatial or temporal information analysis.Spatial-temporal constraint satisfaction is achieved inMSIIA by having an explicit temporal model in the fusionalgorithms and spatial representation in the GIS. Thisprovides the functionality required to analyze therelationships between sensor/source events in space andtime. The following explains how spatial-temporalconstraint satisfaction is achieved.

2-9
S1
S2
S3
Temporal ContourIntersection
Figure 13. Mobility Contour Intersection
Given a number of sensor events that occur at differenttimes and that can potentially be fused (i.e., they satisfyclassification constraints), mobility contours for the timedifference between the events are constructed. Thesemobility contours (generated in the GIS) represent where anobject could be based on the time difference to otherobjects. These mobility contours are generated as afunction of the “mobility characteristics” of the object inquestion. For example a SCUD TEL will only move onimproved hard surface roads. The possible fusion occurswhen there is an intersection of the mobility contours.Figure 13 presents a graphical example of a possiblecontour intersection. Here, three sensor events maypossibly be combined, but, because of the mobilitydynamics of the objects inferred from the sensor events,there is only one possible intersection, namely theintersection of S1 and S3. When there is an intersection oftwo objects a fused “binary track” is created. This becomesa new object in the fusion system and represents therelationship between two pieces of sensor/source data.Binary tracks form the foundation for assembling morecomplex tracks.
With a set of binary tracks which represent all possiblerelationships between sensor/source events, additiontechniques can be employed to explore the relationshipbetween them. The sensor/source pre-processing portion ofthe fusion algorithms, which are responsible for takingintelligence information (events) and populating theknowledge base, were modified to facilitate a new reasoningtechnique for extraction on a minimum set of uniqueobjects and tracks from a set of data. The pre-processorconstructs a set of unique one-to-one (binary) relationshipsbetween all events. These binary tracks enumerate all thepossible relationships that can exist give a set of pointsensor/source data under the constrains of classification andspatial-temporal mobility. Given a set of binary tracks it isthen possible to construct graphs representing relationsbetween events by using analysis techniques from graphtheory to extract unique tracks of objects.
Since the fusion process is based on a model that mimicsthe analyst's reasoning process, this appears to yield moreintuitive and credible explanations of inferences. Inparticular, since the fusion process is constraint based,MSIIA "justifies" its conclusions by listing the constraintsthat were satisfied to fuse information together. Figure 14presents a sample of the explanation of a fused binarytrack. Here, two events with related classification andmeeting spatial-temporal constraints are summarized for theuser.
Binary track of event 187 and 462
Event 187classification VABlocation 47.578 28.137time 02/17/93:13.10.12
Event 462classification VAlocation 47.203 28.134time 02/17/93:13.57.20
Time difference - 47.08Distance Difference - 23.47Average velocity - 29.91Binary track confirmed byclassification and space-time
Figure 14. Sample Fusion Algorithm Explanation
Finally, MSIIA incorporates a natural language front endbased on Natural Language Inc.’s COTS tool whichenables the analyst to query the system for data andexplanations of inferred information. Graphical displays ofevent sequences over time enable the user to quicklyexamine the inferred behavior of objects.
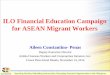
launch-mission
supply-act launch-act
relocate-act relocate-act
move com
static
MTI ELINT IMINT HUMINT
BehaviorRecognition
ComplexActivity
Recognition
ObjectPrimitiveActivity
Sensor/Source
Situational Awareness
move
com
com static
staticm-launch-act
Figure 15. Levels of Recognition
Future investigations are evaluating the ability to interpretinformation at increasingly higher levels of abstraction.Figure 15 illustrates how sensors can recognize objects andultimately activities, from which higher level behaviorscan be inferred. As information fusion capabilitiesapproach descriptions of enemy behavior levels,opportunities increase for incorporation into high levelcampaign planning.
6. LESSONS LEARNEDA number of key lessons can be culled from the aboveexperiences. First, Commercial off the Shelf (COTS)

2-10
hardware and software has assumed strategic importancegiven the ability to leverage commercial investment,efficiencies, and marketplace competition [14]. This canalso dramatically decrease time to field applications andmaintenance tails. For example, the intelligencecommunity’s Intelink system went from concept tooperational in a matter of months by replicating existingInternet functionality on classified networks. What makesCOTS truly valuable are standards for information storage,processing, and exchange in order to ensure systemsinteroperability. This provides the added benefit of vendorindependence, which enables the government to takeadvantage of marketplace competition assuming there is novendor monopoly. Distributed object management willhelp further this trend as third party vendors become able toadd value to products without having to first develop full-featured offerings.
Finally, unlike traditional multi-year or multi-decadeacquisition cycles where a formal process of requirementsanalysis through acquisition and finally logistical supportis rigidly followed, the pace of political, military doctrine,and technology change underscore the importance of acollaborative, evolutionary approach to acquisition. Bythis we mean that multifunctional teams, from technologyproviders to end users, are assembled to rapidly deploy, in aphased approach, fielded capabilities which are refined tomeet operational requirements through direct interactionwith and involvement of end users. In cases where legacysystems are too complex or expensive to re-engineer,object request brokers can serve as an important element insupporting interoperability. Lastly, in any system thatwill be developed for tasks as complex and involving asmany uncertainties as crisis action planning, truly powerfulsystems will only be possible when we find effectivemechanisms that utilize both machine and humanknowledge synergistically to enhance overall systemperformance.
7. A VISION FOR THE FUTUREDespite formidable mission planning systems such asCTAPS, there exists no current set of collaborative,campaign and theater-level mission planning and battlecoordination tools to support joint or internationaloperations. This is exacerbated by the lack of a commoninformation infrastructure at multiple levels (including dataelement standards, network protocols, security services, anduser applications). This has resulted in limited systeminteroperability which minimizes possible informationsharing and real-time coordination of joint andmultinational teams. This limits joint coalition forcesfrom effective, real-time resource reallocation andrescheduling and results in decreased resource utilization(increased cost) and increased force risk (e.g., unthwartedenemy threats, fratricide).
Figure 16 shows a vision for knowledge-based, distributed,collaborative planning to support the Joint Task ForceCommander, a notional integrated view of capabilitiesdescribed in this article. These include:
- Knowledge-based planning and scheduling aids, at thecampaign and theater level, which exploit techniques
such as hierarchical planning, case-based reasoning(e.g., about historical/enemy battles) and knowledge-based simulation of friendly and enemy forces.
- Multisource correlation/fusion and enemy behaviorlearning, recognition and prediction using statistical,pattern-recognition, and knowledge-based techniques.
- Highly interactive, intuitive, and intelligent human-computer interfaces that support multidimensionalsituation analysis and course of action visualization
- Collaborative tools that enable not only informationsharing but virtual collaboration among users.
Figure 16. Vision for Intelligent, Distributed,Collaborative Planning
7.1 Capability/FunctionalityThis vision comprises three key operational facilities: anintelligent and intuitive mission planning interface forjoint and multinational use, a set of collaborative,knowledge based mission planning tools, and aninformation infrastructure that will enable the above.
First, automated multisensor selection and/or multisensorfusion in the context of an intelligent and intuitive displaywill enable a senior intelligence officer and perhaps eventhe commander to interactively perform situationassessment. Importantly, the human-machine interfacewill provide multimedia, multilingual and multipartyinteraction to support collaboration with coalition forces.A user-adaptive interface will provide rapidly customizableviews for specific task functions, including browsing,search, and visualization of real-time as well as historicalinformation. This will include summary views (e.g., offused tracks, of overall characteristics of a class of objects)which will allow rapid access to supporting details forfurther analysis or verification.
Second, the underlying systems will provide a shared set ofintelligent mission planning and scheduling tools. Thesewill facilitate decision making through use of multiplecapabilities including:
- Access to historical missions/battles to analyze enemypropensities for response/attack
- Intelligent agents to discover and filter criticalinformation and patterns
- Real-time simulation of friendly and enemy forces(using real data mixed with simulated agents) tosupport rapid what-if analysis

2-11
- Knowledge based planning and scheduling tools thattake into account factors such as current intelligence,weapons characteristics, logistics constraints, weatherconditions, and objectives and strategies, to facilitatedecision making through recommendations ofalternative courses of action
- Embedded, on-line intelligent trainers for learningadvanced system features in non-crisis periods as wellas providing on-line task assistance during operations
The aim of all of these facilities will be to increase thecognitive power and efficiency of the decision maker.
To support the above requires a critical third element:mechanisms for bridging the gaps between existingstovepipe systems to support rapid integration of joint andcoalition systems in crisis situations. This includes notonly access to heterogeneous databases (e.g., intelligence,operations, and logistics data) but also interoperability ofhigher level application tools (e.g., requirementsmanagement, target nominations, force allocation).Modules would be integrated using open systemsapproaches (e.g., object-request broker standards, messagingand directory services standards) which support evolutionarydevelopment of new facilities to facilitate technologytransfer.
7.2 Technology NeededSeveral technologies are key to enabling the abovefacilities. First, we require technologies to supportadaptive, intuitive user interaction. These include self-adaptive input/output devices, multilingual speechrecognition and generation, multimedia presentationplanning, natural language dialogue management,information summarization, and virtual displays [15].
To support intelligent decision support, we require a hostof technologies such as real-time knowledge basedsimulation and planning tools. This will result in severecomputational challenges, for example, to support largeobject-oriented and knowledge-intensive simulations (e.g.,simulating hundreds of thousands of battlefield objects).The collaborative nature of the tools will require advancesin workflow management and intelligent routing (e.g., tosupport joint and multinational tasking, dissemination ofindications and warnings).
Finally, several infrastructure advances are required tofacilitate information sharing and collaborative planning.These include scaling up approaches such as the ObjectRequest Broker (ORB) to integrate legacy systems andsupport rapid integration of and evolution toward newcapabilities. Multilevel security will clearly be an issuegiven the number and types of partners likely to beinteracting using such a system and their differinginformation needs. Communications requirements andcomplexities will require more sophisticated approaches tonetwork and systems management (e.g., active performancemanagement, knowledge based fault detection, diagnosis,repair). Communicators will demand real-time videoteleconferencing as well as application and multimediainformation sharing (e.g., maps, imagery) which willlikely require gigabit and terabit networking but also
advances in compression techniques and wirelesstechnologies to support the soldier, airman, and seaman inthe field.
To make progress toward the outlined vision requires notonly coordinated technological investment by NATOmember nations, but also commitment to more towardcommon architectures. Action should include:
1. Sharing lessons learned with NATO member nations.2. Building a common NATO infrastructure by exploiting
advances in distributed object technology to set thestage for future systems integration.
3. Establish a working group to forge a common visionfor distributed, collaborative planning systems that canfoster user pull and international partnering to move inthis direction.
8. CONCLUSIONGlobal geo-political, economic, and military acquisitionchanges are driving a fundamental questioning of both whatis needed to support national and global security and howbest to provide that. An increasing trend towardinterdependent political, economic, and military systemshas focused attention on the need for improved joint serviceand international systems. We currently lack of a set ofcollaborative, integrated, interservice and internationalcampaign and theater-level mission planning and battlecoordination tools. This is exacerbated by the lack of acommon information infrastructure at multiple levels(including data element standards, network protocols,security services, and user applications).
This has resulted in limited system interoperability whichminimizes possible information sharing and real-timecoordination of joint and multinational efforts. This limitsjoint coalition forces from effective, real-time resourcereallocation and rescheduling and results in decreasedresource utilization (increased cost) and increased force risk(e.g., unthwarted enemy threats, fratricide). This articleoutlines the emerging role of distributed objectmanagement, and forthcoming distributed, collaborativeforce deployment and employment tools that, together witha new approach to procurement and a vision for the future,can help address the serious existing shortfalls ininteroperability, functionality, and systems acquisition.

2-12
9. REFERENCES
1. A National Security Strategy of Engagement andEnlargement, July 1994. The White House (ISBN 0-16-045153-1)
2. Widnall, S. E.1995. State of the Air Force. TheHansconian, January 6, 1995.
3. Knowledge Based Guidance and Control Functions.1994. Draft AGARD Advisory Report from WorkingGroup 11 of the Guidance and Control Panel ofNATO/AGARD.
4. Brando, T. J. December, 1994. DOMISImplementation of CTAPS Functionality UsingOrbix. MITRE Paper 94-B0000287.
5. Thomas J. Brando and Myra Jean Prelle, October,1994. "DOMIS Project Experience Migrating LegacySystems to CORBA Environments", OOPSLA-94Workshop Is CORBA Ready for Duty?.
6. Walker, E. and Cross, S. (eds) to appear. Proceedingsof the ARPA-Rome Laboratory Planning InitiativeAnnual Workshop, Morgan-Kaufmann Publishers,June 1994.
7. Mulvehill, A. 1994, September 17. DistributedCollaborative Planning Tools: JWID-94 EvaluationResults. Unpublished Report. MITRE Corporation,Bedford, MA 01730.
8. Cross, S., Roberts, D., Mulvehill, A. and Sears, J. A.1994. Case-based Reasoning Applied to a ForceGeneration Decision Aid. Eighth InternationalSymposium on Methodologies for IntelligentSystems, Charlotte, N.C., October 16-19, 1994.
9. Coley, S. M., Connolly, D., Koton, P. K., McAlpin,S. and Mulvehill, A. M. SMARTPLAN: A CaseBased Resource Allocation and Scheduling System:Final Report, MITRE MTR-11270, The MITRECorporation, Bedford, MA 01730.
10. The Air Campaign Planning Tool: An Introduction.Draft. 1 July 1993. HQ USAF/XOCC -- Checkmate.
11. ACPT - The Air Campaign Planning Tool. ISXCorporation, Westlake Village, CA. White paper.
12. Hansen, S and Nakamoto, G. June, 1993. "Multi-Source Integration and Intelligence Analysis." JointDirectors of Laboratories Data Fusion Symposium.Vol I , 171-182.
13. Joint Directors of Laboratories Data Fusion Subpanel[1992]
14. Horowitz, B. M. 1993. Strategic Buying for theFuture: Opportunities for Innovation in GovernmentElectronics System Acquisition. Libey PublishingInc.: Washington, D.C.
15. Maybury, M. T. editor. 1993. Intelligent MultimediaInterfaces. AAAI/MIT Press.
10. ACKNOWLEDGMENTSThis paper presents an integrated view of multiple on-going activities involving many individuals and multipleorganizations (e.g., ESC, ARPA, RL, MITRE). Particularthanks goes to Steve Hansen who contributed much of theinformation fusion section. I also thank Dr. Myra Prelle,Thomas Brando, Alice Mulvehill, Alice Schafer, PennyChase whose CTAPS and ForMAT work I summarize.Thanks also to Cliff Miller for sharing his domainexpertise and guidance. Further appreciation goes to GlenNakamoto, Steve Cross, Nort Fowler, Don Roberts, LouHoebel, Steve Huffman, Ed Green, Bob Nesbit, Bob Frost,and Ed Thompson, who are responsible for severalprograms described in this article. I thank Lt Col DouglasFord for feedback on the final draft. Finally, I thank DonNeuman for encouraging me to write this article. Anyomissions or errors are my own.
11. GLOSSARY
ACPT Air Campaign Planning ToolA F M S S Air Force Mission Support SystemAOC Air Operations CenterA P S Advanced Planning SystemARPA Advanced Research Project AgencyATO Air Tasking OrderATD Advanced Technology DemonstrationCOTS Commercial Off the ShelfCOA Courses of ActionCTAPS Contingency Theater Automated
Planning SystemCINC Commander-in-ChiefCAFMS Computer Assisted Force
Management System
C4I Command, Control, Communications, Computers, and Intelligence
DART Dynamic Analysis and Replanning ToolDMA Defense Mapping AgencyDODIIS Department of Defense Intelligence
Information SystemE S C US Air Force Electronic Systems CenterForMAT Force Module Analysis
and Management ToolGCCS Global Command and Control SystemGIS Geographic Information SystemGLAD Geographical Logistics Awareness DisplayHUMINT Human IntelligenceIMINT Imagery IntelligenceIFD Integrated Feasibility DemonstrationJCS Joint Chiefs of StaffJDISS Joint Deployable Intelligence Support
SystemJDL Joint Directors of LaboratoriesJFACC Joint Force Air Component CommanderJFLCC Joint Force Land Component CommanderJFMCC Joint Force Maritime Component
CommanderJFSOCC Joint Force Special Operations Component
Commander

2-13
Joint STARS Joint Surveillance Target Attack Radar System
JTF Joint Task ForceJWICS Joint Worldwide Intelligence
Communications SystemJWID Joint Warrior Interoperability
DemonstrationJMAPS Joint Message Analysis and Preparation
SystemMOIE Mission Oriented Investigation and
ExperimentationMSIIA Multisource Intelligence Integration
and AnalysisMTI Moving Target IndicatorRL US Air Force Rome LaboratoryRAAP Rapid Application of Air PowerSIGINT Signals IntelligenceSOCAP SIPE-II Operational Crisis Action PlannerSIGINT Signals IntelligenceTARGET Theater Analysis, Replanning and
Graphical Execution Toolbox (IFD-3)TPFDD Time Phased Force Deployment DataUSTRANSCOM United States Transportation
CommandX-IST Extended Intelligence Support Terminal