Embed Size (px)
Citation preview

Distributed Control of Electric Vehicle Charging
Omid Ardakanian, Catherine Rosenberg, S. Keshav

EV market is growing rapidly
2

Electric Vehicles – Challenges & Opportunities
3
spatial & temporal uncertainties
EV charging load is significant
~

Electric Vehicles – Challenges & Opportunities
4
spatial & temporal uncertainties
impact on the distribution network
EV charging load is significant

Lopes, J.A.P.; Soares, F.J.; Almeida, P.M.R., "Integration of Electric Vehicles in the Electric Power System," Proceedings of the IEEE , vol.99, no.1, pp.168,183, Jan. 2011
Impacts on the Grid • Branch and transformer congestion
– accelerates degradation of power apparatus
– leads to overheating (risk of explosion)
– may trigger the protection system
• Voltage swings at distant buses – affects the grid reliability
5

Electric Vehicles – Challenges & Opportunities
6
spatial & temporal uncertainties
scheduling & control
impact on the distribution network
EV charging load is significant

State of the Art Approach: Scheduling
• Scheduling solutions typically solve a power flow problem
• They rely on
– an accurate model of the distribution network
– prediction of the home loads
– prediction of arrivals and departures of EVs
7

Our Approach is…
To adapt the charging rate of EV chargers to the available capacity of the distribution network in real-time using the same tricks as TCP congestion control
Real-time control is feasible in the smart grid
8

Smart Grid Enables Real-time Control
• Pervasive measurement
• Broadband communication
• Increased intelligence
9
MCC nodes
Smart chargers
Every line/transformer has a setpoint

We are inspired by the success of TCP congestion control
10
efficiency
fairness
scalability
stability
robustness
responsiveness

Optimal Control
A single snapshot optimization problem:
max𝑟𝑎𝑡𝑒 log 𝑟𝑎𝑡𝑒𝑠𝑠∈𝒮
subject to
0 ≤ 𝑟𝑎𝑡𝑒𝑠 ≤ 𝑚𝑎𝑥𝑟𝑎𝑡𝑒𝑠 ∀𝑠 ∈ 𝒮
𝐸𝑉 𝑙𝑜𝑎𝑑𝑙 + ℎ𝑜𝑚𝑒 𝑙𝑜𝑎𝑑𝑙 ≤ 𝑠𝑒𝑡𝑝𝑜𝑖𝑛𝑡𝑙 ∀𝑙 ∈ ℒ
11
Similar to [Low99], [Kelly98]
utility of s

Optimal Control
A single snapshot optimization problem:
max𝑟𝑎𝑡𝑒 log 𝑟𝑎𝑡𝑒𝑠𝑠∈𝒮
subject to
0 ≤ 𝑟𝑎𝑡𝑒𝑠 ≤ 𝑚𝑎𝑥𝑟𝑎𝑡𝑒𝑠 ∀𝑠 ∈ 𝒮
𝐸𝑉 𝑙𝑜𝑎𝑑𝑙 + ℎ𝑜𝑚𝑒 𝑙𝑜𝑎𝑑𝑙 ≤ 𝑠𝑒𝑡𝑝𝑜𝑖𝑛𝑡𝑙 ∀𝑙 ∈ ℒ
12
Similar to [Low99], [Kelly98]

Optimal Control
A single snapshot optimization problem:
max𝑟𝑎𝑡𝑒 log 𝑟𝑎𝑡𝑒𝑠𝑠∈𝒮
subject to
0 ≤ 𝑟𝑎𝑡𝑒𝑠 ≤ 𝑚𝑎𝑥𝑟𝑎𝑡𝑒𝑠 ∀𝑠 ∈ 𝒮
𝐸𝑉 𝑙𝑜𝑎𝑑𝑙 + ℎ𝑜𝑚𝑒 𝑙𝑜𝑎𝑑𝑙 ≤ 𝑠𝑒𝑡𝑝𝑜𝑖𝑛𝑡𝑙 ∀𝑙 ∈ ℒ
13
Similar to [Low99], [Kelly98]
𝑙
𝑠𝑢𝑏𝑡𝑟𝑒𝑒(𝑙)

Optimal Control
Consider a series of snapshots
14
1 2 3 4
(measured by an MCC node)
line
/tra
nsf
orm
er
load
ing

Distributed Control vs. Centralized Control
Pros:
• No single point of failure
• Scalability
• Charging rates do not change drastically – the stepsize bounds the change
Cons:
• Convergence time
• Communication overhead
15

Dual Decomposition & Control Rules
• Two phases are repeated in every iteration of the algorithm
16
Master Problem (solved at MCC nodes)
Subproblem 1 (solved at EV charger 1)
Subproblem n (solved at EV charger n)
𝑝𝑟𝑖𝑐𝑒𝑠 𝑝𝑟𝑖𝑐𝑒𝑠
…
Lagrangian multipliers

Dual Decomposition & Control Rules
17
MCC nodes solve master problem
Smart chargers solve subproblems

Dual Decomposition & Control Rules
1. MCC nodes update congestion prices and send them to downstream EV chargers
𝑝𝑟𝑖𝑐𝑒𝑙 ← max {𝑝𝑟𝑖𝑐𝑒𝑙 − 𝑠𝑡𝑒𝑝𝑠𝑖𝑧𝑒 × (𝑠𝑒𝑡𝑝𝑜𝑖𝑛𝑡𝑙 − 𝑙𝑜𝑎𝑑𝑙), 0}
18
Master Problem (solved at MCC nodes)
Subproblem 1 (solved at EV charger 1)
Subproblem n (solved at EV charger n)
𝑝𝑟𝑖𝑐𝑒𝑠 𝑝𝑟𝑖𝑐𝑒𝑠
…
Lagrangian multipliers

Dual Decomposition & Control Rules
2. New rates are obtained from solving subproblems using new congestion prices
𝑟𝑎𝑡𝑒𝑠← min1
𝑝𝑎𝑡ℎ 𝑝𝑟𝑖𝑐𝑒𝑠, 𝑚𝑎𝑥𝑟𝑎𝑡𝑒𝑠
19
Master Problem (solved at MCC nodes)
Subproblem 1 (solved at EV charger 1)
Subproblem n (solved at EV charger n)
… 𝑟𝑎𝑡𝑒1
𝐸𝑉 𝑙𝑜𝑎𝑑𝑙
𝑟𝑎𝑡𝑒𝑛

Measurement/Control Timescale
20
t = 0 iteration 1
MCC node decreases congestion price
line
/tra
nsf
orm
er
load
ing

Measurement/Control Timescale
21
t = delay iteration 1
Downstream chargers increase their rate
line
/tra
nsf
orm
er
load
ing

Measurement/Control Timescale
22
t = Tc
iteration 2
MCC node increases congestion price
line
/tra
nsf
orm
er
load
ing

Measurement/Control Timescale
23
t = Tc+delay iteration 2
Downstream chargers decrease their rate
line
/tra
nsf
orm
er
load
ing

Stability
• Control is stable for 𝑠𝑡𝑒𝑝𝑠𝑖𝑧𝑒 ≤ 𝑠𝑡𝑒𝑝𝑠𝑖𝑧𝑒∗, 𝑇𝑐 ≥ 𝑑𝑒𝑙𝑎𝑦
• The rate of convergence depends on both 𝑠𝑡𝑒𝑝𝑠𝑖𝑧𝑒, 𝑇𝑐
24
under-damped
over-damped

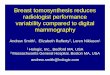
Simulation
IEEE 13-bus test feeder
25

Operation Modes of the Algorithm
• Normal operation mode
• Emergency response mode
26
change in home load
change in home load

Conclusions
• Controlling the EV charging load reduces the need for over-provisioning
• Pervasive measurement and broadband communication in a distribution network motivate real-time control of elastic loads
• Using explicit congestion notification, the EV charging load can be controlled in real-time
27

Guidelines for Setting Control Parameters
• 𝑇𝑐 must be as small as possible
– But in practice 𝑇𝑐 ≫ 𝑑𝑒𝑙𝑎𝑦
• 𝑠𝑡𝑒𝑝𝑠𝑖𝑧𝑒 must be as large as possible
– 𝑠𝑡𝑒𝑝𝑠𝑖𝑧𝑒 = 𝑠𝑡𝑒𝑝𝑠𝑖𝑧𝑒∗
• 𝑠𝑒𝑡𝑝𝑜𝑖𝑛𝑡 can be chosen such that overshoots do not cause line or transformer overloading
28