-
7/29/2019 Distributed Coordination protocol for Adhoc cognitive
radio networks
1/12
JOURNAL OF COMMUNICATIONS AND NETWORKS, VOL. 14, NO. 1, FEBRUARY
2012 51
Distributed Coordination Protocol for Ad Hoc Cognitive
Radio Networks
Mi-Ryeong Kim and Sang-Jo Yoo
Abstract: The exponential growth in wireless services has
resulted
in an overly crowded spectrum. The current state of spectrum
al-
location indicates that most usable frequencies have already
been
occupied. This makes one pessimistic about the feasibility of
inte-
grating emerging wireless services such as large-scale sensor
net-
works into the existing communication infrastructure.
Cognitive
radio is an emerging dynamic spectrum access technology that
can be used for flexibly and efficiently achieving open
spectrum
sharing. Cognitive radio is an intelligent wireless
communication
system that is aware of its radio environment and that is
capa-
ble of adapting its operation to statistical variations of the
radio
frequency. In ad hoc cognitive radio networks, a common
control
channel (CCC) is usually used for supporting transmission
coor-
dination and spectrum-related information exchange.
Determining
a CCC in distributed networks is a challenging research issue
be-
cause the spectrum availability at each ad hoc node is quite
differ-
ent and dynamic due to the interference between and
coexistence
of primary users. In this paper, we propose a novel CCC
selection
protocol that is implemented in a distributed way according to
the
appearance patterns of primary systems and connectivity
among
nodes. The proposed protocol minimizes the possibility of CCC
dis-
ruption by primary user activities and maximizes node
connectiv-
ity when the control channel is set up. It also facilitates
adaptive
recovery of the control channel when the primary user is
detected
on that channel.
Index Terms: Ad hoc networks, cognitive radio, common
control
channel (CCC), coordination protocol.
I. INTRODUCTION
Wireless spectrum licensing on a long-term basis is
currentlyunder way over vast geographical regions. In order to
address
the critical problem of spectrum scarcity, the federal
commu-
nications commission (FCC) has recently approved the use of
unlicensed devices in licensed bands [1]. The report
published
by the spectrum policy task force of the FCC in 2002 [2],
which
was aimed at improving the way of utilizing the spectrum
re-source, catalyzed intensive research activities in this new
field
of open spectrum sharing. Consequently, dynamic spectrum ac-
cess (DSA) techniques have been proposed to solve spectrum
inefficiency problems. Cognitive radio (CR), a term first
coinedby J. Mitola III in 1999 [3], is a promising approach for
flexi-
bly and efficiently achieving open spectrum sharing [4], [5].
A
CR system is an intelligent wireless communication system
that
is aware of its radio environment and is capable of adapting
its
Manuscript received April 27, 2010; approved for publication by
BrookeShrader, Division III Editor, October 20, 2010.
This work was supported by the Inha University Research
Grant.The authors are with the Graduate School of Information
Technology and
Telecommunications, Inha University, 253 Yonghyun-dong, Nam-gu,
Incheon402-751, Korea, email: [email protected],
[email protected].
operation to statistical variations of the radio freqeuncy of
in-
coming signals. IEEE 802.22 [6] is the first standard based
on
CR. IEEE 802.16h [7] is expected to implement CR functions
in worldwide interoperability for microwave access
(WiMAX)networks for facilitating the coexistence of homogeneous
and
heterogeneous networks. A number of cognitive radio
test-beds
based on different architectures and radio technologies have
been developed [8], [9]. Since most of the useful spectrum
is
already assigned to primary systems (licensed systems), to
uti-lize the spectrum holes of the licensed bands, CR devices
should
be capable of detecting primary user signals on the licensed
pri-
mary channels and not lead to harmful interference to the
pri-
mary system users. Research on CR covers a wide range of ar-
eas, including spectrum analysis, channel estimation,
spectrumsharing, medium access control (MAC), and routing.
However,
CR networks pose unique challenges owing to high
fluctuations
in the available spectrum as well as the diverse quality of
service
(QoS) requirements [5]. Specifically, in ad hoc networks
based
on CR, the distributed multi-hop architecture, the dynamic
net-
work topology, and the variation of the spectrum
availability
with time and location are key distinguishing factors. CR
net-
works are different from traditional ad hoc networks in the
sense
that the CR networks can opportunistically utilize various
spec-
tral holes for smooth peer-to-peer communications by virtue
ofthe unique CR functionalities [10].
The ad hoc cognitive radio network requires reliable con-
trol and spectrum management message exchanges between
neighbor nodes to communicate local sensing results, set updata
channels, immediately notify incumbent detection events,
announce spectrum handover, and so on. These message ex-
changes are usually assumed to be carried out on a dedicated
control channel, the so-called common control channel (CCC)
[5]. However, in many cases, we cannot guarantee that dedi-cated
CCCs can be set up for all different cognitive radio net-
works, and further, dedicated control channels are wasteful
of
channel resources when there is no CR user. Therefore, a dy-
namic and distributed method is required for CCC selection inad
hoc CR networks. In this paper, we propose a novel CCCselection
protocol (distributed coordination protocol for a CCC
(DCP-CCC)) in a distributed way, based on the appearance
pat-
terns of the primary system (PS) and network connectivity.
The
proposed protocol provides a decentralized cluster-based
archi-
tecture to form a large-scale network, and it provides
mecha-nisms to adapt the network topology to network and radio
en-
vironment changes. Preliminary results of the proposed
proto-
col were presented in [11]. In this paper, we have extended
the
cluster management methods (cluster merge, cluster intercon-
nection, and common channel change schemes) and have inten-
sively studied the performance of the proposed protocol for
var-
1229-2370/12/$10.00 c 2012 KICS
-
7/29/2019 Distributed Coordination protocol for Adhoc cognitive
radio networks
2/12
52 JOURNAL OF COMMUNICATIONS AND NETWORKS, VOL. 14, NO. 1,
FEBRUARY 2012
ious network conditions.The rest of this paper is organized as
follows. Related work
is discussed in Section II. The proposed DCP-CCC protocol is
presented in detail in Section III. Cluster management is
pre-
sented in Section IV. The performance of the proposed
protocol
is studied in Section V. Finally, we conclude this paper in
Sec-tion VI.
II. RELATED WORK
Most of the existing distributed CR network protocols for
MAC and routing assume that there exists a dedicated
CCC.However, such protocols are in conflict with the
opportunistic
nature of cognitive radio, and moreover, most of the
available
spectrum has already been allocated to existing
communication
systems. Therefore, it may not be feasible to assign
dedicated
CCCs to all possible types of CR networks in the future. SomeCR
systems use an unlicensed band, such as industrial, scien-
tific, and medical (ISM) bands, or ultra-wide bands (UWBs)
for
the control channel. In this case, the unlicensed band is
alreadyovercrowded and suffers strong interference from existing
un-
licensed band users; therefore, reliability, which is one of
themost important features of the control channel, cannot be
guar-
anteed [12]. In the absence of a dedicated CCC, a
distributed
and dynamic self-configurable procedure is required for
setting
up a common channel.
A CCC can be classified as an in-band CCC or out-of-band
CCC, depending on whether the control channel shares the
data
channel or uses a dedicated spectrum, respectively [13]. In
the
in-band CCC, the current data transmission channel is also
usedfor exchanging control messages. Since each node pair may
use
a different channel for communication, the CCC is
generallylimited to the corresponding communication pair (i.e.,
local cov-
erage). Therefore, the out-of-band CCC is widely considered
for
ad hoc CR networks. Some studies assume that there exists
acommon channel with global coverage available for all nodes in
ad hoc CR networks. The network nodes also have the capabil-
ity determine and use an alternate global control channel if
the
original control channel is jammed [14][16]. Two neighboring
nodes can exchange available channel information or
negotiatechannel assignments of a link via the control channel. In
[16]
and [17], the authors propose a global control channel to
carry
out the MAC-layer control mechanisms in the open spectrum
sharing paradigm which is so popular so that it is not required
to
be explained further. The C-MAC protocol presented in [18]
isbased on the dynamic channel assignment protocol [19]. These
protocols use the packet-based channel assignment approach.
However, it is difficult to find a globally common channel
in
a network, and there are frequent individual spectrum
changes
even if a CCC covering the entire network is found. Changingthe
CCC frequently leads to drastic communication overhead.
There is high possibility that the global CCC can suffer denial
of
service (DoS) attacks [20]. Therefore, global CCC approaches
are unlikely to be applicable to real CR network scenarios.
Since the probability that a global CCC is available to ev-
ery node in the network is small, CR users can be grouped
into
clusters and a CCC may be used for the nodes in the same
clus-ter. In this case, the selected CCC has only group
coverage.
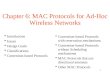
Fig. 1. Proposed ad hoc CR network architecture.
In [14], Zhao et al. proposed a distributed coordination
scheme
for spectrum allocations that addresses the spectrum
variability
problem without using a global control channel. Zhao et al.s
scheme uses a group coordination channel instead. In [21], a
close group of users form a sub ad hoc network and select
achannel for communicating control information. If the primary
user of the channel returns, then a different channel that is
avail-
able to everyone in the available sub-group channels is
chosen.
It is assumed that one of the members of the group has the
ca-
pability to connect to the neighboring groups. In CogMesh
[10],
a cluster-based framework is used to form a wireless mesh
net-
work in the context of open spectrum sharing. The study in
[10]
investigates the issues involved in setting up an ad hoc
open
spectrum sharing network that coexists with primary users of
the spectrums and proposes a decentralized cluster-based
archi-tecture to form a large-scale network. The basic unit of the
net-
work is a cluster, which is a sub-network formed by a group
of
neighbor nodes sharing common channels and coordinated by
aselected node (called cluster head) in the cluster.
On the other hand, some proposed MAC protocols do not re-
quire separate control channels for the purpose of control
signal
exchange. Using a single CCC may introduce control
channelsaturation that degrades the overall performance of the
network.
In [22], SYN-MAC was proposed for avoiding the use of the
CCC. The main idea is to divide the total time into
fixed-time
intervals, each corresponding to one of the available
channels.
At the beginning of each time slot, all nodes in the network
lis-
ten to a channel whose time slot is equal to the time
required
for the exchange of control messages. However, this scheme
requires global time synchronization. Synchronization in an
ad
hoc network is a challenge owing to the absence of
centralized
coordination.
III. DCP-CCC: DISTRIBUTED COORDINATION
PROTOCOL FOR COMMON CONTROL
CHANNEL SELECTION
A. Network Architecture and Design Requirements
Fig. 1 shows the network environments of cognitive radio
ad hoc networks. We assume that there is no fixed dedicated
CCC and that the average spectrum idle time of the PSs is
much
longer than the packet transmission time. As shown in Fig.
1,each node may have a different set of available channels
after
-
7/29/2019 Distributed Coordination protocol for Adhoc cognitive
radio networks
3/12
KIM AND YOO: DISTRIBUTED COORDINATION PROTOCOL FOR AD-HOC...
53
local spectrum sensing. In the proposed common channel
selec-tion and maintenance protocol, we form clusters with
desired
sizes, and within the cluster range, an optimal CCC is
selected.
In order to choose a CCC, the DCP-CCC takes into account not
only the locally available spectrum bands of each node, but
also
the temporal and spatial variations in the primary user
spectrumactivities. In Fig. 1, the cluster head (CH) is a node that
initi-
ates cluster formation for selecting the CCC. The actual
cluster
nodes that share the same CCC are determined by the
initially
desired cluster size and each nodes available channel set.
Mul-
tiple clusters can be merged or interconnected by using
gatewaynodes.
The proposed DCP-CCC has the following unique design
fea-tures.
i) No global time synchronization: Achieving time synchro-
nization in ad hoc networks is not a trivial task and
generally
requires complex device implementation or synchronization
protocols. Therefore, we assume that time synchronization isnot
provided in the proposed method.
ii) Configurable cluster size: A cluster is a set of nodes that
usethe same control channel. To increase the network connectiv-
ity, a cluster should include as many CR nodes as possible.
If the cluster size is too small, then an entire CR network
canbe partitioned into many small clusters, and they may not be
connected to exchange the control messages of the MAC and
of the routing operations. Even if some of them can be
inter-
connected by gateway nodes, the control channel switching
overheads of the interconnected clusters, which use differ-ent
CCCs, increase the packet delivery time and decrease the
throughput. In this paper, the cluster size is adaptively
con-
figurable when the CH initiates the control channel setup
pro-
cedure. The actual cluster size can be smaller than the
desiredsize when the optimal channel in terms of the proposed
per-
formance criteria (average primary system appearance prob-
ability and idle time) is not available for all nodes in the
de-
sired cluster.
iii) Fast common channel setup: In CCC-based MAC opera-
tions of ad hoc CR networks, before the CCC is setup, eachnode
cannot send data packets to or receive data packets from
neighbor nodes. Exchanges pertaining to the data channel ne-
gotiation and transmission time schedule are performed on
the control channel. Therefore, the control channel setup
time
should be minimized. Since nodes may have different sets
ofavailable channels and since they can tune into different
chan-
nels at a given time, ensuring fast message delivery for
settingup a common channel is not a trivial task.
iv) New CCC selection criteria: A single cluster should
include
as many nodes as possible while having a size less than
thedesired cluster size, and the selected channel should have
low
PS activities.
v) Common channel change mechanism upon the primary sig-
nal detection: When some of the cluster nodes have detected
the primary signals of the current CCC, then this
informationshould be delivered to the neighbor nodes in the cluster
to
make them perform local sensing. By considering the number
of interfering CR nodes, the cluster should decide whether
all
cluster nodes should reselect the control channel or whetherthe
interfering nodes should be isolated.
Fig. 2. CC IVT message format.
vi) Cluster merge and interconnection: For control message
ex-
change or packet delivery between any nodes in the entiread hoc
network, the clusters should be able to communicate
through CCCs. Clusters with the same CCC are merged, and
the clusters with different CCCs are interconnected by gate-
way nodes in the proposed protocol.
The proposed DCP-CCC can set up a wide-area CCC thatcan reach
many CR nodes with a single control channel without
channel switching. In CogMesh [10], which is also a cluster-
based common channel CR network, a CH constructs a clus-
ter only with single-hop neighbors, and therefore, many gate-way
nodes are required to interconnect other neighboring clus-
ters. Since gateway nodes should manage the data
transmission
schedule for multiple clusters and frequently switch
channels,
their use results in a decrease in the channel throughput.
In
DCP-CCC, the CH selects an optimum control channel on thebasis
of primary signal activities and the number of possibly
covered nodes, unlike CogMesh.
B. Common Control Channel Setup Procedure
To set up a CCC, CR nodes follow six steps: 1) Local sensing
and scanning, 2) common channel invitation, 3) cluster tree
con-
struction, 4) common channel reporting, 5) CCC decision, and6)
common channel advertisement. In the following subsections,the
operations are explained in detail.
B.1 Local Sensing and Scanning
Each node i in a ad hoc CR network periodically or aperiod-
ically performs local sensing to determine the available
chan-
nel set (Ca(i)) and primary channels. If a node needs to findan
existing cluster to share the common channel, then it shouldscan
all channels to possibly receive a common channel beacon
(CC BC) message from a neighbor node; CC BC is periodi-
cally broadcast by a CH. A node should listen to one channel
for a duration of at least Tp to receive CC BC. Tp is the time
in-terval taken for beacon transmission from the CH. The CC
BCincludes the CCC information. Therefore, once a node receives
the message, it can immediately tune to the indicated CCC
and
start exchanging control messages. In this case, there is no
ex-
plicit procedure for connecting to the CH. The local sensing
andscanning of each channel may be done simultaneously.
B.2 Common Channel Invitation
If a node does not receive any CC BC during the scanning
procedure, then it can be inferred that there is no CCC or that
the
existing CCCs are not available for the node. In this case,
the
CR node initiates the cluster construction process by
broadcast-ing a common channel invite (CC IVT) message to its
neighbor
-
7/29/2019 Distributed Coordination protocol for Adhoc cognitive
radio networks
4/12
54 JOURNAL OF COMMUNICATIONS AND NETWORKS, VOL. 14, NO. 1,
FEBRUARY 2012
Fig. 3. Broadcasting CC IVT via the CH.
nodes using carrier sense multiple access with collision
avoid-
ance (CSMA/CA). The CC IVT message format is defined as in
Fig. 2. The CC IVT can be rebroadcast until the desired
clustersize is reached.
Transmitting node ID: ID of the node that transmits theCC
IVT.
CH node ID (cluster head node ID): ID of the node that
ini-tially generated the CC IVT. When a CH sends the CC IVT
at first, Transmitting node ID and CH node ID are the
same.
SEQ number (sequence number): Whenever a CH sends aCC IVT to
find a new CCC, it increases the SEQ number
by 1. This number is for uniquely identifying CC IVT mes-
sages; periodic CC IVT repetitions have the same SEQ
num-ber.
Hop count: The desired maximum hop counts (cluster size)from the
CH to retain the same CCC. When a node receives
a CC IVT, it decreases the hop count by 1, and it broadcasts
it again only if the count is not zero.
Candidate channel list (CCL): This list contains the
candidatechannels that can possibly be used as the CCC. Whenever
a
node rebroadcasts a CC IVT, the CCL can be updated.
If a CH node broadcasts the CC IVT message only on a sin-gle
channel, then some neighbor nodes cannot receive the mes-
sage when the channel used to broadcast the CC IVT is not
available to these neighbor nodes. Further, because each CRnode
tunes into one of the available channels at a given time,
the neighbor nodes may not be able to receive the message
even
though the channel is available to the neighbor nodes.
Therefore,
a CH sequentially broadcasts a CC IVT on each available
chan-
nel using a single transceiver, as is shown in Fig. 3. If the
CHhas multiple transceivers, then the available channels are
subdi-
vided among the different transceivers. After a duration
ofTp,
the CH rebroadcasts the CC IVT with the same SEQ number.
Each neighbor node should wait at least for a duration ofTp
foreach of its available channels. If a neighbor node does not
re-
ceive the CC IVT, then it switches to the next channel on
its
local available channel list.
B.3 Common Channel Cluster Tree Construction
After a node receives a CC IVT from its neighbor node, itstores
the candidate channel list of the CC IVT and the node
ID of the transmitting node. When node i receives a CC IVT
from neighbor node j, it determines the overlapping common
channel set Cc(i, j) from its local available channel list
Ca(i)and the CCL of the received CC IVT, CIVTc (j), from node
j.
Cc(i, j) = Ca(i) CIVT
c (j). (1)
If node i first receives a CC IVT message from node j and
Cc(i, j) = , then node i records nodej as a parent node.
Notethat within a cluster, each node can reach the CH through its
par-
ent node using one of the overlapping common channels. Then,
node i rebroadcasts the CC IVT with an updated CCL as indi-
cated in (2).
CIVTc (i) = Cc(i, j) = Cc(i, j) = Ca(i) CIVTc (j) (2)
where Cc(i, j) is the set of channels in the CCL field
rebroad-cast by node i after receiving a CC IVT from node j. After
de-
creasing the hop count of the received CC IVT, unless the
hop
count is zero, node i sequentially and periodically
rebroadcasts
the CC IVT message on all available channels. If there are
nooverlapping channels between its locally available channels
and
the received CCL from node j, then it indicates that node i
and
node j do not have any common channels; therefore, they are
not able to setup a CCC. In this case, node i simply discards
the
CC IVT.
If node i receives additional CC IVT messages satisfying
thefollowing three conditions from any other neighbor node k,
then
it simply discards them.
i) The same CH node ID with the previously received CC IVT
from node j.ii) The same SEQ number.
iii)
Cc(i, k) for all parent nodes j
of node i
Cc(i, j). (3)
If some channels ofCc(i, k) were not included in the previ-ous
CC INV forwarded, then it indicates that node i can have
new channels that can be used as a CCC; these new channels
are
not selected on the basis of CC IVTs sent by the previous
par-
ent nodes. Therefore, if the condition in (4) is satisfied
despitethe CH node ID and SEQ number of the CC IVT from node ibeing
the same as those in the CC IVT from the previous parent
nodes, then node k becomes a new parent node of node i and
node i rebroadcasts the CC IVT from node k to its neighbor
nodes with the CCL in (5).
Cc(i, k) for all parent nodes j
of node i
Cc(i, j), (4)
CIVTc (i) = Cc(i, k)
= {Ca(i) CIVT
c (k)} for all parent nodes jof node i Cc(i, j).(5)
Fig. 4 explains the CC IVT message transmissions and
presents an exampleof tree construction. As shown in
thefigure,
the CC IVT message is propagated until the desired cluster
size
is reached, and the common channel cluster tree is
constructed
accordingly. When there is no neighbor node to rebroadcast
the CC IVT or when the neighbor nodes cannot receive theCC IVT,
the message cannot be propagated further even if the
desired cluster size is not reached. It should be noted that
un-
like the conventional multicasting tree, a node can be
involved
in multiple tree paths because the common control tree is
builtaccording to channel availability. The numbers in brackets
for
-
7/29/2019 Distributed Coordination protocol for Adhoc cognitive
radio networks
5/12
KIM AND YOO: DISTRIBUTED COORDINATION PROTOCOL FOR AD-HOC...
55
Fig. 4. CC IVT transmission and tree construction.
each node are the available channels of that node. Assume
thatnode A is the CH that generated the CC IVT message. Node B
receives the CC IVT message from node A on one of its avail-
able channels (channel 1 or channel 2) and computes the can-
didate channel list, which consists of the overlapping
available
channels between node A and node B, as indicated in (2).
Then,node B rebroadcasts the CC IVT message (in Fig. 4, CC IVT
(3) message). For channel 1 and channel 2, node B records
node
A as a parent node. On the other hand, node D cannot receive
the CC IVT from node A because it does not have any avail-
able channels overlapping with node A. When node B receivesCC
IVT (2) from node C, since node B has already set up a
common channel tree for the channel set {1, 2}, node B
simplyignores the message.
As shown in Fig. 4, node H receives two CC IVT messages.We
assume that the CC IVT from node F arrives later than the
CC IVT from E. Node H discovers that the CH node ID and
the SEQ number of each of the CC IVTs are the same, but the
CCLs are different. At node H, first, the candidate channel
list
with parent node E is derived as {1, 2} using (2), and when
nodeH receives the list a little later in the CC IVT from F, the
CCL
with parent node F is newly derived as {3} using (5).
Therefore,node H has two parent nodes: Node E for channel set {1,
2}and node F for {3}. When node K finally receives the CC IVT,the
hop count reaches 0, and therefore, node K stops CC IVT
broadcasting.
B.4 Common Channel Reporting
Common channel report (CC RPT) message is used to de-
liver CCC information on the path through which the CC IVT
is delivered, to the CH to help in deciding the final common
channel. For the following two cases, a node stops broadcastinga
CC IVT and periodically sends back a CC RPT message to
Fig. 5. CC RPT message format.
its parent nodes.1) A node receives a CC IVT and the hop count
reaches zero.2) A node has broadcast a CC IVT, but has not received
any
CC RPT message during a certain time TR
TR = (R Hop Count)TW (6)
where R Hop Count is the hop count at the node when it
hasbroadcast the CC IVT and TW indicates the maximum waiting
time to receive a CC RPT from one hop neighbor node. The
CC RPT message format is illustrated in Fig. 5. Transmitting
node ID: ID of the node that transmits the
CC RPT.
CH node ID: ID of the CH node that initially generatedCC
IVT.
SEQ number: The same SEQ number as that of the receivedCC
IVT.
Tuple {Ch, Pp, Tpi, NUMC}: For each candidate com-mon channel on
the path to the CH, the following definitions
hold.
Ch: Candidate CCC Pp: Accumulated PS appearance probability on
the chan-
nel Ch Tpi: Accumulated average PS idle time on the
channelCh
NUMC: Accumulated number of connected nodes thatcan use the
channel Ch as a CCC
Each node in ad hoc CR networks senses the channels and
maintains a channel status table that contains the PS
appearanceprobability (Pp) and the average PS idle time (Tpi) of
each chan-
nel. In this paper, we utilize the PS appearance probability
and
idle time statistics for the CCC decision. As we mentioned
in
the subsection on design requirements, to ensure that the
com-
mon channel in a cluster is used by as many nodes of the
clusteras possible, information on the number of nodes on the
channel
tree to the cluster head is included in the CC RPT message.Fig.
6 shows an example of a CC RPT delivery procedure.
When nodes I and K receive CC IVT messages, the hop count
reaches zero, so nodes I and K cease to broadcast the CC IVT
and respond with CC RPT messages to their parent nodes. Af-
ter node C sends a CC IVT, it does not receive any CC RPT
during a certain time (i.e., 2TW). Therefore, node C initiatesa
CC RPT response message. The CC PRT message is deliv-
ered to the parent node on the channel cluster tree to the
CH.Note that the tree formation from the CH to nodes with a hop
count within a predetermined value is already performed upon
the delivery of the CC IVT message, so that nodes can send a
CC RPT to only their stored parent nodes on available chan-nels.
Each node on the common channel cluster tree adds the
-
7/29/2019 Distributed Coordination protocol for Adhoc cognitive
radio networks
6/12
56 JOURNAL OF COMMUNICATIONS AND NETWORKS, VOL. 14, NO. 1,
FEBRUARY 2012
Fig. 6. CC RPT transmission example.
PS appearance probability and the average primary idle time
of
each channel to the received CC RPT message. In Fig. 6, node
B adds its local measurement information on channel 1 to
that
of CC RPT (2) from node G, so that the tuple of channel 1 ofCC
RPT (3) is {1, 0.8, 25, 3}. Node H has two different parentnodes, E
and F, for the candidate channel sets {1, 2} and {3},respectively.
Therefore, the channel information on {1, 2} and{3} is delivered to
the CH through node E and node F, respec-tively. In the proposed
mechanism, the channel and connectiv-ity information of each node
inside the desired cluster size is
delivered to the CH through a unique path so that each nodes
information is not counted as duplicate content. Fig. 7 shows
the
pseudocode for our proposed CC RPT transmission scheme.
B.5 Common Control Channel Decision
A CH maintains a candidate CCC status table. Whenever the
CH receives CC RPT messages, it updates the table. For
eachchannel in the received CC RPT messages, Pp, Tpi, and the
connected nodes are accumulated. Finally, the CH divides Ppand
Tpi by the number of connected nodes for each channel after
the CH has received a sufficient number of CC RPT messages,
or after the maximum waiting time has expired. The cluster
head
can estimate the average PS appearance probability, average
PS
idle time, and the total number of possibly connected nodes
in-
cluding CH itself for each candidate CCC. Therefore, the CHcan
identify a CCC based on the PS activities and determine the
number of nodes that can be connected together via a common
channel. Table 1 shows the status of each candidate channel
for
the example scenario in Fig. 6.Depending on the importance of
each parameter, the CH can
Fig. 7. Pseudocode for the common channel reporting
procedure.
Table 1. Candidate CCC status for a scenario corresponding to
the
table in Fig. 6.
Channel ID Average Pp Average Tpi Connected nodes
1 0.21 8 8
2 0.24 7.6 5
3 0.18 7 5
Fig. 8. Procedure for the CCC decision.
determine the optimal CCC. Various decision rules can be ap-
plied (e.g., a cost function with different weights for three
pa-
rameters). In this paper, the purpose of determining a CCC
is
that as many CR nodes as possible should be able to share
the
same CCC as long as the primary activity values are less than
thepre-defined thresholds. As shown in Fig. 8, in step 1, the
chan-
nel set CSP is determined by considering the PS
appearanceprobability, and the average PS idle time is considered
in step
2. From the channel set CST, the channel with the largest
num-
ber of connected nodes is finally selected for use as the
CCC.After step 1 or step 2, if the number of channels determined
is
less than 2, then the channel with the minimum Pp (in step 1)
or
maximum Tpi (in step 2) is selected.
B.6 Common Control Advertisement
After the CH determines the optimal CCC, information on the
selected CCC is sequentially broadcast with a common channel
advertisement (CC ADV) message to the nodes in the clusterhop
count on all available channels. After a sufficient number of
CC ADV transmissions have been completed, the CH switches
to the CCC and periodically broadcasts CC BC. The CC BC is
a message to indicate activation of the new CCC. The neigh-bor
nodes that receive CC ADV sequentially rebroadcast the
-
7/29/2019 Distributed Coordination protocol for Adhoc cognitive
radio networks
7/12
KIM AND YOO: DISTRIBUTED COORDINATION PROTOCOL FOR AD-HOC...
57
CC ADV along with their available channels and then switchto the
CCC. Therefore, switching to the new CCC is performed
sequentially in the cluster. When a node receives a CC ADV
message, the selected CCC may not be available to the node.
In this case, the node discards the CC ADV and tries to find
or
construct a new cluster by starting from procedure A
(scanning).It should be noted that since ad hoc nodes can move
without
notifications, the CH should periodically reinitiate the
common
channel setup procedure.
In this paper, the proposed CCC selection algorithm relies
on
many broadcast messages. Since radio signals are likely to
over-lap with other signals in a geographical area,
straightforward
broadcasting usually results in serious redundancy and
collision,
which is referred to as the broadcast storm problem. To
reduce
the number of broadcast packets and possible packet losses
re-
sulting from collisions, several mechanisms have been proposedin
the literature, such as a probabilistic scheme, a counter-based
scheme, and spanning tree clustering [23], [24]. Any broad-
cast storm avoidance mechanism can be used with the proposed
method.
IV. CLUSTER MANAGEMENT
A. Cluster Merge and Interconnection
Multiple CCC clusters organized in the network can be
merged or interconnected by gateway nodes. Cluster merge and
interconnection mechanisms facilitate seamless data
exchanges
between any pair of nodes in the network by enhancing the
net-
work connectivity. A node that already uses a CCC of a cer-
tain cluster may overhear another clusters CC ADV or CC BC
messages through one of the available channels during its
nor-
mal operation. When both clusters use the same control
channel,the overhearing node can be a gateway node to merge two
clus-ters, as shown in Fig. 9(a). In this case, all ad hoc nodes in
the
two clusters can exchange control messages by using a single
common channel. If the CCC in the overheard messages is dif-
ferent but one available to the node, then the node can
intercon-
nect the two clusters via control channel switching, as shown
in
Fig. 9(b).
In the case of cluster interconnection, if a single
transceiver
is used to access a common control channel, the gateway node
needs to divide its resources between both clusters, as shown
in
Fig. 9(b), so the neighbor nodes (nodes B and G) of the
gatewaynode should know the exact time schedule of the gateway
node.
The time schedule indicates when the gateway node switches tothe
neighbor clusters CCC. Therefore, the greater the number
of gateway nodes in the network, the higher the cluster
connec-
tion overheads and the lower the control channel throughput.In
the proposed procedure for CCC selection, a CH selects a
CCC that can reach many nodes without gateway nodes. When
the CH selects a new control channel, it considers the
number
of nodes connected to each candidate CCC, which is obtained
from NUMc in the CC RPT message. Another method to re-duce the
gateway nodes in this paper is to broadcast a gateway
node announcement to its neighbors. If there are many
overlap-
ping nodes between two clusters, we may have multiple candi-
date gateway nodes. Once any node assumes the gateway role,it
broadcasts a gateway advertisement (GATE ADV) message
(a)
(b)
Fig. 9. Cluster merge and interconnection: (a) Cluster merge and
(b)cluster interconnection.
to its neighbor nodes, and any neighbor node that receives
the
message will not be a gateway node. The GATE ADV message
includes the CH IDs of both clusters.
B. Common Channel Change
Even though the CH selects the CCC after proper considera-
tion of the average PS appearance probability and idle time,
thePS may suddenly use the CCC. Since the cognitive radio net-
work should avoid harmful interference with PSs, when nodes
detect the primary signal on the current CCC, the detection
in-
formation should be conveyed to the neighbors. In addition,
thedetecting nodes should stop using the CCC, to protect the
PSs.
In the proposed mechanism, the primary system detection in-
formation is delivered to the CH, and the CH decides whether
the common channel should be changed. This decision will be
made on the basis of the cost of changing the CCC (i.e.,
mes-sage exchange overhead and delay) and the number of
detecting
nodes in the cluster. If the CCC is not changed, then the
de-
tecting nodes simply leave the cluster without exchanging
mes-
sages. As mentioned in Section III, the detecting nodes may
try
to form a new cluster or join one of the other existing
clusters.
B.1 Primary Detection Notification
When a node detects a primary signal on the current CCC, it
sends a common channel detection (CC DET) message to the
CH on the present CCC and immediately returns to listen
mode.
In this mode, a node can listen to a common channel signal,
but
it is prohibited from sending messages on the channel. Even
though it is not on the routing path to the CH, any neighbor
node that overhears the CC DET message performs local sens-ing
to determine whether it is inside the primary signal area. The
CC DET message includes the CH node ID, the SEQ number
(the same as the SEQ in CC ADV), information on the primary
detected CCC, and NUMd. NUMd is the number of detectingnodes on
the routing path. At the first detecting node, NUMd is
-
7/29/2019 Distributed Coordination protocol for Adhoc cognitive
radio networks
8/12
58 JOURNAL OF COMMUNICATIONS AND NETWORKS, VOL. 14, NO. 1,
FEBRUARY 2012
Fig. 10. Forwarding CC DET.
set to 1.
B.2 Forwarding CC DET Message
When a node receives a CC DET message, if it is the next
node on the routing path, then it forwards the message to the
CH
node. If it is not on the routing path and has simply
overheardthe message, then it performs local sensing. If the node
detects
a primary signal on the CCC as a result of local sensing, then
itinitiates the primary detection notification procedure by
sending
a CC DET message. If the node is on the path and has also
detected a primary signal and if it has not previously
forwarded
any CC DET message with the same SEQ and CH node ID,
then it increases NUMd by 1 and forwards the CC DET to theCH. If
the node has already transmitted the CC DET with the
same SEQ and CH node ID to the same CH node or if it does
not detect a primary signal on the CCC, then it simply
forwards
the message to the CH without increasing NUMd.Fig. 10 shows the
CC DET forwarding procedure. Nodes A,
B, C, D, E, F, and G belong to the cluster using channel 1 asthe
CCC; node A is the CH of that cluster. As soon as node F
detects the primary signal of channel 1, it transmits a CC
DET
to its neighbor node E that is on the routing path to node A.
Sincenode E is also within the range of the primary signal, it
increases
NUMd by1. NodeB isnot influenced by the primary signal,
andtherefore, it forwards the CC DET to node A without
increasing
NUMd.
B.3 Common Channel Change
On the basis of the received CC DETs, the CH decideswhether it
should change the cost CCC. To change the current
CCC, the CH should take into account of CCC in terms of
thenumber of control message exchanges and the delay in form-
ing a new cluster. The percentage ofNUMd in the total numberof
nodes in the cluster can be used to determine CCC changecriteria.
If the CH decides to change the current CCC, then it
broadcasts a common channel change (CC CNG) message in
all available channels, including the new CCC. The new chan-
nel is selected from the candidate common channel set shown
in
Table 1. If there is no candidate channel for the new CCC,
thenthe CH initiates a new common channel construction
procedure
by sending a CC IVT. When a node receives a CC CNG, it de-
creases the hop count and checks whether the hop count is
zero.
If it is not zero, the node rebroadcasts the CC CNG on all
avail-able channels. Then, the node switches to the new CCC.
Table 2. Simulation parameters.
Parameter Value Parameter Value
PS appearanceON-OFF model
CR nodes40 m
pattern transmission range
Back-offCSMA/CA
Number of50600
mechanism CR nodes
Number of grids 36 grids Channel pool 120 channelsSize of one
grid 100 m 100 m Cluster size 15 hops
PS interference 4 neighboring, 2.0, 0.2
range grids
Number of14
% ofNUMd20%
primary systems for CCC change
B.4 Cluster Division
If a node in the listen mode is not able to hear the CC CNG
message from the CH until the CC CNG waiting time has ex-
pired or if the new CCC of the received CC CNG is not avail-
able to the node, then the node starts a new CCC setup
proce-dure as discussed in Section III. Before it initiates a new
cluster,
it should wait to check whether it receives any CC BCs from
neighboring clusters for joining one of the existing clusters.
If
there is no CC BC matching the available channels, then it
startsto create a new cluster by sending a CC IVT message. In
this
case, cluster division can occur.
V. SIMULATION RESULTS
In this section, simulation experiments conducted to evalu-
ate the performance of the proposed algorithm are discussed.
For the simulation study, we implemented a CR network simu-lator
completely in object-oriented C++, and the simulator in-
cludes a multi-channel system environment, channel sensing,
and CSMA/CA based data transmission. We employ the com-
mon channel selection algorithm of CogMesh [10], [25] for
per-formance comparison. CR network devices are randomly placed
in a two-dimensional area 600 m 600 m, and the
maximumtransmission range of a CR node is set to 40 m. We use
the
ON-OFF model for the PS appearance pattern. The CSMA/CA
back-off mechanism is used when each node sends control
mes-sages. The entire area is subdivided into 36 grids (66 grids),
asshown in Fig. 11. PSs are located at the cross points of the
grids,
and they affect the 4 neighboring grids. The channels used
by
the PSs are randomly selected from the channel pool (CP).
Thespecific simulation parameters are shown in Table 2. Fig.
11shows an example of a topology (300 CR nodes in the entire
network and 5 channels in the CP) considered in our
simulation
study. Fig. 12 shows the corresponding PS appearances on
grids
G1, G15, and G25. From the ON-OFF model, the activation and
idle time of the PSs are found to follow an exponential
distribu-
tion with and . We set as 0.2 and as 0.4.
In the first experiment, we observe the average number
ofclusters for different numbers of nodes. As shown in Fig. 13,
when the cluster size (CS) is set to 1, the proposed scheme
shows performance similar to that of CogMesh. However, as
we increase the cluster size, the number of generated
clustersdecreases in the proposed method. Therefore, many CR
nodes
-
7/29/2019 Distributed Coordination protocol for Adhoc cognitive
radio networks
9/12
KIM AND YOO: DISTRIBUTED COORDINATION PROTOCOL FOR AD-HOC...
59
Fig. 11. Example of a simulation topology.
Fig. 12. PS appearances according to the ON-OFF model.
can have the same common channel. The number of channels in
the CP is fixed at 5 in Figs. 13 and 14.
The number of single-node clusters is compared for the
differ-
ent methods in Fig. 14. A single-node cluster has only a
single-
node that is acting as a CH. It can be considered as an
isolatednode, and it cannot exchange control messages with
neighbor
nodes. Therefore, a smaller percentage of single-node
clusters
indicates better network connectivity. As shown in Fig. 14,
the
proposed method results in a lesser number of isolated
nodes.
In the CCC selection, it is desirable that the selected CCC
should be stable for the longest time possible. This stability
canbe measured by determining the average PS appearance proba-
bility and the average idle time of the PS of the chosen CCC.For
different CP sizes, ranging from 1 to 20 channels, the sta-
bility factors are compared (Figs. 15 and 16). The number of
nodes in the network is set to 150. Regardless of the total
num-ber of channels, PS appearance probabilities determined by
us-
ing CogMesh do not show a specific trend with increasing CP
for the selected CCC because it is not aware of the PS
statis-
tics. When the network has a single channel, the two
algorithms
show similar performances in selecting the CCC. However, asthe
number of channels in the CP increases, the proposed proto-
col shows outstanding performance with regard to not only
the
PS appearance probability but also the CCC idle time. In
other
words, the proposed method needs less frequent CCC
changescompared to the conventional method.
Fig. 13. Number of clusters.
Fig. 14. Number of isolated nodes.
Fig. 17 presents the number of clusters for different CP
sizes.When the size of the CP is one, the network is reduced to
a
single-channel network. Upon increasing the CP size, CogMesh
retains a similar number of clusters. On the other hand, the
num-
ber of clusters is significantly reduced as the CPs are
increased
in the proposed protocol because if the number of channels
in-creases, then each cluster can find a CCC that can cover
many
CR nodes with high possibility.In Fig. 18, we show the average
delay of cluster formation. To
successfully set up a CCC for a cluster, some control
message
exchanges (CC IVT, CC RPT, and CC ADV) are required in
the proposed method. When the cluster size is 1, the
required
time is relatively short and similar to that of CogMesh.
How-ever, as the cluster size increases, the path from a CH to
the
last node on the cluster boundary also increases, so the
average
delay increases. However, the larger the cluster size, the
more
the nodes that can use the CCC and the lesser the number of
gateway nodes required.
Figs. 19 and 20 show the number of gateway nodes for clus-
ter merging and cluster interconnection, respectively. As
thenumber of nodes in the network increases, we can observe
that
-
7/29/2019 Distributed Coordination protocol for Adhoc cognitive
radio networks
10/12
60 JOURNAL OF COMMUNICATIONS AND NETWORKS, VOL. 14, NO. 1,
FEBRUARY 2012
Fig. 15. Average PS appearance probability for the selected
CCC.
Fig. 16. Average primary system idle time for the selected
CCC.
the number of gateway nodes also increases. In the
proposedmethod, as the CS increased, the required number of
gateway
nodes for a given number of nodes in the network decreases
since each cluster contains more member nodes. The gateway
node should perform common channel switching, resource shar-
ing between multiple clusters, and frequent control message
ex-
changes. Therefore, a small number of gateway nodes are
re-quired if reliable network connectivity is supported. The
pro-
posed method (with CS 2) always shows a lesser number ofgateway
nodes than CogMesh, as can be observed in Figs. 19and 20, and the
network connectivity is also superior to that of
CogMesh, as shown in Fig. 14.
Fig. 21 explains the CCC change trials performed by the CH
when the nodes detect PS appearances. In this experiment,
the
number of nodes is 300, and if the number of detected nodes ina
certain cluster is 5, 10, 15, 20, 25, or 30% of the total
number
of nodes in the cluster, then the CH tries to change the
exist-
ing CCC. In the proposed method, upon detecting PS appear-
ances, the detecting node in a certain cluster sends a CC
DETmessage to its CH. After the CH receives several CC DETs,
(a)
(b)
Fig. 17. The number of clusters in different CPs: (a) CogMesh
and (b)proposed.
Fig. 18. Average delay for cluster formation.
it should decide on the basis of the number of detected
nodes
whether the cluster should change the current CCC. If a
large
number of nodes detect the PS, then the CH selects a new
CCCusing the aforementioned CCC selection algorithm. The x-axis
-
7/29/2019 Distributed Coordination protocol for Adhoc cognitive
radio networks
11/12
KIM AND YOO: DISTRIBUTED COORDINATION PROTOCOL FOR AD-HOC...
61
Fig. 19. Number of gateway nodes that perform cluster
merging.
Fig. 20. Number of gateway nodes that perform cluster
interconnection.
of Fig. 21 represents the threshold percentage of detecting
nodes
required to effect a CCC change. As expected, a lower
thresh-
old percentage results in more CCC change trials. In fact, a
CCC
change involves high cost in terms of convergence time,
clusterre-formation, and message exchanges. Therefore, if the area
of
the primary detected signal is relatively small, then local
CCC
repair is preferred. In local CCC repair, if the nodes that
trans-mitted CC DET do not receive any CCC change message
within
a predetermined time, then they simply join one of the
neighborclusters or start a new cluster formation process.
Fig. 22 shows the CCC switching delay. When a CH decides
to change the current CCC, it transmits a CC CNG message
and the message is sent to all the nodes in the cluster. In
this
experiment, we measured the delay up to the instant at which
a node successfully changed the control channel after the
CHannounced a CCC change. As can be observed in Fig. 22, as the
cluster size increases, the average delay also increases. Since
the
CC CNG is sent from the CH, a node that is closer to the CH
can switch to the new control channel much faster than
clusterboundary nodes.
Fig. 21. CCC change trials performed by the CH upon detecting
the PS.
Fig. 22. Common control channel switching delay.
VI. CONCLUSION
In this paper, we have proposed an efficient common
controlchannel selection protocol for ad hoc networks in the
context of
CR. The control channel for CR operation is constructed in a
distributed way. To determine an optimal common control
chan-
nel, we have defined a channel-based tree from the cluster
head
to the nodes within a predetermined number of hops. The
pro-posed distributed coordination protocol takes into account
the
primary system activities of each channel and node
connectivityfor common channel selection. We have also proposed a
pri-
mary detection notification procedure to efficiently change
the
common control channel. In a simulation study, we have
eval-uated the protocol performance under various network
condi-
tions. Compared with the conventional CogMesh CR clustering
method, the proposed DCP-CCC requires a smaller number of
clusters, and therefore, many CR nodes can communicate with
the same control link. Further, the proposed DCP-CCC enhancesthe
control channel connectivity at the cost of an increase in the
delay in cluster formation. The most important contribution
of
this paper is that the common control channel selected by
us-
ing the proposed protocol is more reliable and stable since it
isselected by considering channel activities of the primary
sys-
-
7/29/2019 Distributed Coordination protocol for Adhoc cognitive
radio networks
12/12
62 JOURNAL OF COMMUNICATIONS AND NETWORKS, VOL. 14, NO. 1,
FEBRUARY 2012
tems. The proposed protocol also reduces the frequency withwhich
control channels are changed and cluster re-formation.
REFERENCES
[1] FCC, Notice of rule making and order, No. 03-322, Dec.
2003.[2] FCC, Spectrum policy task force report, No. 02-155, Nov.
2002.
[3] J. Mitola III, Cognitive radio: An integrated agent
architecture for soft-ware defined radio, Ph.D. dissertation,
Computer Communication Sys-tem Laboratory, Department of
Teleinformatics, Royal Institute of Tech-nology (KTH), Stockholm,
Sweden, May 2000.
[4] S. Haykin, Cognitive radio: Brain-empowered wireless
communica-tions, IEEE J. Sel. Areas Commun., vol. 23, no. 2, pp.
201220. 2005.
[5] I. Akyildiz, W. Lee, M. Vuran, and S. Mohanty, Next
generation/dynamicspectrum access/cognitive radio wireless network:
A survey, Computer
Netw., vol. 50, no. 13, pp. 21272159, 2006.[6] C. Cordeiro, K.
Challapali, and M. Ghosh, Cognitive PHY and MAC
layers for dynamic spectrum access and sharing of TV bands, in
Proc.TAPAS, 2006.
[7] J. Sydor, Messaging and spectrum sharing between ad-hoc
cognitive ra-dio networks, in Proc. IEEE ISCAS, 2006.
[8] T. Weiss and F. Jondral, Spectrum pooling: An innovative
strategy for theenhancement of spectrum efficiency, IEEE Commun.
Mag., vol. 42, no.3, pp. 814, 2004.
[9] R. Brodersen, A. Wolisz, D. Cabric, S. Mishra, and D.
Willkomm.(2004). CORVUS: A cognitive radio approach for usage of
virtual un-licensed spectrum. White paper. [Online]. Available:
http://bwrc.eecs.berkeley.edu/Research/MCMA
[10] T. Chen, H. Zhang, G. M. Maggio, and I. Chlamtac, CogMesh:
Acluster-based cognitive radio network, in Proc. IEEE DySPAN,
2007,pp. 168178.
[11] M.-R. Kim and S.-J. Yoo, Distributed coordination protocol
for com-mon control channel selection in multichannel ad-hoc
cognitive radio net-works, in Proc. IEEE WiMob, 2009, pp.
227232.
[12] L. Lazos, S. Liu, and M. Krunz, Spectrum opportunity-based
controlchannel assignment in cognitive radio networks, in Proc.
SECON, 2009.
[13] I. F. Akyildiz, W.-Y. Lee, and K. R. Chowdhury, CRAHNs:
Cognitiveradio ad hoc networks, Ad Hoc Netw., vol. 7, pp. 810836,
2009.
[14] Q. Zhao, L. Tong, A. Swami, and Y. Chen, Decentralized
cognitive MACfor opportunistic spectrum access in ad hoc networks:
A POMDP frame-work, IEEE J. Sel. Areas Commun., vol. 25, no. 3, pp.
589600, 2006.
[15] P. Kyasanur and N. H. Vaidya, Selfi
sh MAC layer misbehavior in wirelessnetworks, IEEE Trans. Mobile
Comput., vol. 4, no. 5, pp. 502516, 2005.[16] J. Li, C. Blake, D.
S. J. De Couto, H. I. Lee, and R. Morris, Capacity of
ad hoc wireless networks, in Proc. ACM Int. Conf. Mobile Comput.
Netw.,2001, pp. 6169.
[17] S. Krishnamurthy, M. Thoppian, S. Venkatesan, and R.
Prakash, Controlchannel based MAC-layer configuration, routing, and
situation awarenessfor cognitive radio networks, in Proc. IEEE
MILCOM, 2005, pp. 455460.
[18] C. Cordeiro and K. Challapali, C-MAC: A cognitive MAC
protocol formulti-channel wireless networks, in Proc. IEEE DySPAN,
2007, pp. 147157.
[19] L. Ma, X. Han, and C.-C. Shen, Dynamic open spectrum
sharing MAC
protocol for wireless ad hoc networks, in Proc. IEEE DySPAN,
2005, pp.203213.
[20] J. Zhao, H. Zheng, and G. Yang, Distributed coordination in
dynamicspectrum allocation networks, in Proc. IEEE DySPAN, 2005,
pp. 259268.
[21] S.-L. Wu, C.-Y. Lin, Y.-C. Tseng, and J.-L. Sheu, A new
multi-channelMAC protocol with on-demand channel assignment for
multi-hop mobileAd hoc networks, in Proc. IEEE ISPAN, 2000, pp.
232237.
[22] Y. R. Kondareddy and P. Agrawal, Synchronized MAC protocol
for multi-
hop cognitive radio networks, in Proc. IEEE ICC, 2008, pp.
31983202.[23] S.-Y. Ni, Y.-C. Tseng, Y.-S. Cheu, and J.-P. Sheu,
The broadcast storm
problem in a mobile ad hoc network, in Proc. ACM/IEEE
MobiCom,1999, pp. 151162.
[24] R. Gandhi, A. Mishra, and S. Parthasarathy, Minimizing
broadcast la-tency and redundancy in ad hoc networks, IEEE/ACM
Trans. Netw.,vol.16, no. 4, pp. 840851, 2008.
[25] T. Chen, H. Zhang, G. M. Maggio, and I. Chlamtac, Topology
man-agement in CogMesh: A cluster-based cognitive radio mesh
network, inProc. IEEE ICC, 2007, pp. 65166521.
Mi-Ryeong Kim received the B.S. degree in Com-puter Science
Engineering and M.S. degree in In-formation and Telecommunication
Engineering fromInha University, Incheon, Korea, in 2008 and
2010,respectively. Her research interests include cognitiveradio
network protocols and wireless sensor networks.Since 2010, she has
been with Hyundai Mobis.
Sang-Jo Yoo received the B.S. degree in ElectronicCommunication
Engineering from Hanyang Univer-sity, Seoul, Korea, in 1988 and the
M.S. and Ph.D.degrees in Electrical Engineering from the Korea
Ad-
vanced Institute of Science and Technology (KAIST),in 1990 and
in 2000, respectively. From 1990 to 2001,he was a member of
technical staff at the Korea Tele-com Research and Development
Group, where heworked in the communication protocol
conformancetesting and network design fields. From September1994 to
August 1995 and from January 2007 to Jan-
uary 2008, he was a guest researcher at the National Institute
of Standards andTechnology (NIST), USA. Since 2001, he has been
with the Graduate Schoolof Information Technology and
Telecommunications, Inha University, where heis currently a
Professor. His current research interests include cognitive
radionetwork protocols, seamless network mobility control, wireless
network QoS,and wireless sensor networks.