Embed Size (px)
Citation preview
DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA LICENCIATURA
INGENIERÍA ELECTRÓNICA
SISTEMA DE CONTROL DE FERMENTADOR
ASESORES:
PROF. OTHÓN GANDARILLA CARRILLO PROF. MAURICIO LÓPEZ VILLASEÑOR
ALUMNOS:
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
MÉXICO D.F. A 20 DE DICIEMBRE DEL 2007
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
1
ÍNDICE 1. OBJETIVOS ...................................................................................................................... 2 2. INTRODUCCIÓN ............................................................................................................... 3
3. MARCO TEÓRICO ............................................................................................................. 4 3.1 FERMENTACIÓN ...................................................................................................................4
3.1.1 Clases de fermentación. ............................................................................................................. 5 3.1.2 Clasificación de las reacciones de fermentación según el consumo de oxígeno ........................... 5 3.1.3 Materias primas ......................................................................................................................... 5 3.1.4 Parámetros que afectan la fermentación. ................................................................................... 6 3.1.5 Ecuación general de fermentación ............................................................................................. 7 3.1.6 Fases de una fermentación ......................................................................................................... 8 3.1.7 Equipos de fermentación ........................................................................................................... 8
3.2 MICROCONTROLADORES......................................................................................................9 3.2.1 El microcontrolador................................................................................................................... 9 3.2.2 Microcontroladores más comunes............................................................................................ 10 3.2.3 Arquitectura de microcontroladores. ....................................................................................... 11 3.2.4 Microcontroladores PIC. ......................................................................................................... 12 3.2.5 Justificación de la utilización de un microcontrolador PIC ..................................................... 16 3.2.6 El microcontrolador PIC 16F877. ............................................................................................ 16 3.2.7 Entorno de desarrollo integrado MPLAB ................................................................................ 22 3.2.8 El Amplificador Operacional ................................................................................................... 23 3.2.9 Termopares.............................................................................................................................. 25
4. DESARROLLO EXPERIMENTAL .........................................................................................33 4.1 MODELADO DEL COMPORTAMIENTO TERMOPAR TIPO “T” .............................................. 33
4.1.1 Método de regresión lineal. ...................................................................................................... 33 4.1.2 Tablas y gráficas. ..................................................................................................................... 33
4.2 SISTEMA DE CONTROL ....................................................................................................... 38 4.2.1 Elección del microcontrolador. ................................................................................................ 38 4.2.2 Diagrama a bloques del circuito. .............................................................................................. 38 4.2.3 Diagrama a bloques del sistema ............................................................................................... 39 5.2.4 Diagrama del circuito .............................................................................................................. 43
5. RESULTADOS ..................................................................................................................44 6 CONCLUSIONES ...............................................................................................................47
7 BIBLIOGRAFÍA.................................................................................................................50 8 APÉNDICE .......................................................................................................................51
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
2
1. OBJETIVOS Modelar teóricamente el comportamiento de algunos sensores con la finalidad de entender su funcionamiento y de esta manera poder proceder al diseño del sistema. Aunque el objetivo esencial es el de presentar el diseño de un control electrónico de un fermentador para varias variables físicas basado en un microcontrolador y algunos sensores con los cuales se pretende obtener las mediciones que dichos sensores arrojen. Mediante el microcontrolador se pretende obtener la lectura dada por dichos sensores é interpretar dichas lecturas mediante un algoritmo implementado en un lenguaje de bajo nivel. Hecho lo anterior se pretende mostrar el resultado de las mediciones tomadas por los sensores y previamente interpretadas por el microcontrolador por medio del puerto serial de una computadora conectada a nuestro sistema. Conocer el comportamiento de los sensores aplicados para la medición de las variables en la fermentación de los alimentos. Realizar la caracterización del sensor para juzgar su comportamiento real y asignar criterios en la variable registrada por el controlador para que las mediciones sean lo más acercado a los valores reales. Elegir la metodología estadística o numérica en el modelado del sensor como base de las operaciones realizadas por el controlador. Aprovechar adecuadamente los recursos del controlador para convertir los valores eléctricos en la variable física.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
3
2. INTRODUCCIÓN El proceso denominado fermentación es de gran utilidad en nuestra vida cotidiana debido a que es utilizado con gran frecuencia en nuestras vidas específicamente en nuestra alimentación. La industria hoy en día se ha dado a la tarea de valerse de dicho proceso para producir alimentos basados en este fenómeno, para vender productos que son utilizados en nuestra vida cotidiana. Debido a la importancia que la fermentación tiene en nuestra alimentación es necesario capacitar personal en este sentido para que día con día puedan mejorarse las técnicas para llevar a cabo dicho proceso. Un tópico de gran interés cuando de fermentación se habla es la medición de determinados parámetros los cuales son trascendentales en la realización adecuada de dicho proceso, generalmente dichas mediciones se realizan manualmente mediante instrumentos de medición simples tales como termómetros para la medición de temperatura ó papel tornasol cuando se habla de PH, sin embargo resulta interesante y de gran utilidad la implementación de un sistema electrónico basado en sensores y el uso de un microcontrolador para la realización del monitoreo de dichas variables. En el capitulo 3 de este trabajo se habla de lo que es la fermentación y su utilidad en la elaboración de productos alimenticios. Así como de las variables a ser tomadas en cuenta en el estudio de este proceso así mismo se habla sobre lo que son los microcontroladores, así como de las tareas más comunes para las cuales son utilizados, además se habla muy específicamente de una clase de microcontroladores denominados PIC. Además se hace referencia a algunos sensores que son útiles en la medición de diversas variables físicas. En el capitulo 4 se da un pequeño bosquejo acerca de lo que sería el diseño electrónico de un control de varias variables. El cual tendrá como finalidad el monitorear algunas variables físicas presentes en el proceso de fermentación de los alimentos. La intención de este trabajo es la de proveer al lector un panorama elemental de lo que es la fermentación y los factores que la afectan pero sobre todo el objetivo principal es el de hacer énfasis en como se puede implementar electrónicamente un sistema capaz de monitorear diversos factores físicos que afectan a dicho proceso.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
4
3. MARCO TEÓRICO 3.1 FERMENTACIÓN
La fermentación es un proceso que realizan muchos microorganismos, efectuando reacciones sobre algunos compuestos orgánicos y liberando energía. Hay muchos tipos diferentes de fermentación, pero en condiciones fermentativas solamente se efectúa una oxidación parcial de los átomos de carbono del compuesto orgánico y, por consiguiente, sólo una pequeña cantidad de la energía potencial disponible se libera.
Los conocimientos sobre la fermentación fueron atesorados desde la antigüedad por importantes civilizaciones como la egipcia y la asiria que la emplearon para la producción de bebidas alcohólicas; o como la azteca y la china que la utilizaron en la obtención de productos alimenticios tales como salsas fermentadas. Las técnicas de fermentación se modernizaron a partir de la aparición de técnicas de cultivos puros de células animales y vegetales, al igual de otro tipo de cultivos microbianos. Así, se industrializa la fermentación y da origen a grandes industrias tales como las alimenticias donde se destacan la panificadora y la de bebidas alcohólicas; la industria farmacéutica en el campo de las vacunas, medicamentos, etc., y la industria química que produce ácidos, aldehídos, etc. De acuerdo con la interpretación bioquímica hecha por Pasteur, la fermentación se conoce como la desasimilación anaeróbica de compuestos orgánicos por la acción de microorganismos u otras células o de extractos celulares; además, es un conjunto de reacciones bioquímicas a través de las cuales una sustancia orgánica se transforma en otras por acción de ciertos microorganismos (bacilos, bacterias, células de levadura), que en general van acompañadas de un desprendimiento gaseoso y de un efecto calorífico. El proceso de fermentación no sólo incluye la desasimilación anaeróbica como la formación de alcohol, butanol−acetona, ácido láctico, etc., sino también la producción industrial de vinagre, ácido cítrico, enzimas, penicilina etc... Todos estos productos son el resultado de procesos microbianos y se llaman productos de fermentación. Análogamente, el término fermentador no sólo hace referencia a los recipientes en los cuales se realiza la fermentación con exclusión de aire, sino también a los tanques en los cuales se producen oxidaciones microbianas aeróbicas y a los tanques de propagación de levaduras y otros microorganismos en presencia del aire. La diferencia con la putrefacción radica en que mientras la putrefacción descompone la materia de origen animal y/o vegetal que contiene compuestos nitrogenados, la
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
5
fermentación realiza descomposición únicamente de material vegetal que no contiene compuestos nitrogenados. 3.1.1 Clases de fermentación.
Hay dos clases bien definidas que son: Fermentación microbiana. Promovidas o catalizadas por microorganismos.
La reproducción de los microorganismos conlleva a que la reacción tenga un comportamiento auto catalítico siendo la concentración de los microorganismos variable. Dentro de este tipo de reacción hay 2 clases bien definidas:
1) Cultivos de tejidos o macroorganismos (células vegetales y animales). 2) Reactores microbianos en sí (cultivo de microorganismos).
Reacciones enzimáticas. Catalizadas por enzimas, el agente catalítico no se
reproduce y cuando se opera discontinuamente este permanece constante. 3.1.2 Clasificación de las reacciones de fermentación según el consumo de
oxígeno
Aeróbicas. Aquí los microorganismos necesitan de oxígeno para poder
sobrevivir. Por ejemplo la reacción de transformación de la glucosa O2 + C6H12O6 CO2 + BIOMASA
Anaeróbicas. Aquí los microorganismos no necesitan de oxígeno para su
supervivencia. Por ejemplo la reacción de transformación de la glucosa por vía glucolítica C6H12O6 2C2H5OH + CO2 + ENERGÍA
3.1.3 Materias primas
Solución o caldo nutritivo: Suelen usarse diversas materias como solución nutritiva, lo importante es que contengan los elementos indispensables para conservar la vida de los microorganismos; ellos son los carbohidratos, nitrógeno y sales adecuadas propias para cada organismo. Estas materias primas se clasifican en: Materias amiláceas: tales como los cereales que contienen almidón,
tubérculos y raíces.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
6
Materias celulósicas: tales como madera y sus residuos. Materias azucaradas: como los mostos y jugos de diferentes frutas, como
la caña de azúcar, remolacha y subproductos de la industria azucarera como melazas y mieles.
3.1.4 Parámetros que afectan la fermentación.
Con el fin de obtener altos rendimientos en la fermentación es necesario considerar ciertos parámetros y realizar un estudio sobre los efectos que en mayor o menor grado alteren la buena marcha del proceso. Temperatura: La selección de esta variable es influenciada tanto por factores
fisiológicos como por problemas físicos (pérdidas debidas a la evaporación de etanol al trabajar con temperatura elevada). Además, se tiene una zona independiente de la temperatura óptima en la cual la levadura aún presenta actividad; a medida que se aleja de la temperatura óptima su actividad disminuye notablemente.
pH: Este es un factor importante en la fermentación, debido a su importancia
en el control de la contaminación bacterial como también al efecto en el crecimiento de las levaduras, en la velocidad de fermentación y en la formación de alcohol. Durante la fermentación la levadura toma el nitrógeno de los aminoácidos orgánicos, perdiendo su carácter anfótero y pasando a ácidos, lo cual origina una disminución del pH del medio. Cuanto más bajo el pH del medio, tanto menor el peligro de infección, pero si se trabaja con pH muy bajos la fermentación es muy lenta, ya que la levadura no se desarrolla de la forma conveniente. El pH es un indicador de la acidez de una sustancia. Está determinado por el número de iónes libres de hidrógeno (H+) en una sustancia. La acidez es una de las propiedades más importantes del agua. El agua disuelve casi todos los iones. El pH sirve como un indicador que compara algunos de los iones más solubles en agua. El resultado de una medición de pH viene determinado por una consideración entre el número de protones (iones H+) y el número de iones hidroxilo (OH-). Cuando el número de protones iguala al número de iones hidroxilo, el agua es neutra. Tendrá entonces un pH alrededor de 7. El pH del agua puede variar entre 0 y 14. Cuando el ph de una sustancia es mayor de 7, es una sustancia básica. Cuando el pH de una sustancia está por debajo de 7, es una sustancia ácida. Cuanto más se aleje el pH por encima o por debajo de 7, más básica o ácida será la solución. El pH es un factor logarítmico; cuando una solución se vuelve diez veces más ácida, el pH disminuirá en una unidad. Cuando una
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
7
solución se vuelve cien veces más ácida, el pH disminuirá en dos unidades. El término común para referirse al pH es la alcalinidad. La palabra pH es la abreviatura de "pondus Hydrogenium". Esto significa literalmente el peso del hidrógeno. El pH es un indicador del número de iones de hidrógeno. Tomó forma cuando se descubrió que el agua estaba formada por protones (H+) e iones hidroxilo (OH-). El pH no tiene unidades; se expresa simplemente por un número. Cuando una solución es neutra, el número de protones iguala al número de iones hidroxilo. Cuando el número de iones hidroxilo es mayor, la solución es básica, Cuando el número de protones es mayor, la solución es ácida.
Aireación: El aire es un factor decisivo en toda fermentación favoreciendo el
rendimiento debido a una buena oxigenación. El oxígeno es el sustrato gaseoso más importante para el metabolismo microbiano. El oxígeno no es un gas muy soluble ya que una solución saturada de oxígeno contiene aproximadamente 9 mg / L de este gas en agua. Debido a la influencia de los ingredientes del cultivo, el contenido máximo de oxígeno realmente es más bajo de lo que debería ser en agua pura. El suministro se logra ingresando aire en el fermentador durante el proceso.
Redox: La oxidación es una reacción química donde un metal o un no metal
cede electrones, y por tanto aumenta su estado de oxidación. La reacción química opuesta a la oxidación se conoce como reducción, es decir cuando una especie química acepta electrones. Estas dos reacciones siempre se dan juntas, es decir, cuando una sustancia se oxida, siempre es por la acción de otra que se reduce. Una cede electrones y la otra los acepta. Por esta razón, se prefiere el término general de reacciones redox. La Fermentación es un proceso catabólico de oxidación incompleto, totalmente anaeróbico, siendo el producto final un compuesto orgánico. Estos productos finales son los que caracterizan los diversos tipos de fermentaciones.
3.1.5 Ecuación general de fermentación
Una ecuación general para el proceso de fermentación se puede sintetizar como:
Microorganismo + sustrato más microorganismo + productos metabólicos Estos productos metabólicos, también llamados metabolitos, son subproductos del crecimiento de los microorganismos y constituyen los materiales de la fermentación útiles al hombre.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
8
3.1.6 Fases de una fermentación
Fase lag. Fase de inactividad de duración variable ya que depende del
número de células así como de las características metabólicas de las mismas. Grandes fases lag indican la presencia de sustancias tóxicas, muerte de células o inactividad de éstas.
Fase temporal de aceleración. No ha sido definida matemáticamente pero en ellas las proporciones de las células hijas tienden a alcanzar el 50% de la población total.
Fase de crecimiento exponencial. Allí crecen los microorganismos rápidamente y el crecimiento de la población depende del sustrato inicialmente colocado (melaza).
Fase estacionaria. Aquí ya se ha alcanzado el máximo valor de producción, en esta fase algunas células se dividen y otras mueren donde las células vivas utilizan los compuestos provenientes de las muertas como nutriente, manteniendo la población constante durante la fase.
Fase de muerte. Dado que la población celular presente no se mantiene por sí misma comienza a morir. Tiene un comportamiento exponencial.
3.1.7 Equipos de fermentación
Dependiendo de la forma física en que se encuentre el medio de cultivo se pueden encontrar varias clases que son:
A. Fermentador de tanque agitado. El medio de cultivo es movido interiormente por medios mecánicos.
B. Fermentador de ciclo. El medio de cultivo es bombeado externamente. C. Fermentador air−lift. Al medio de cultivo se le inyecta aire para ser agitado,
el cual también sirve como fuente de oxígeno para el crecimiento de los microorganismos.
D. Fermentador de lecho fijo. Aquí el medio se inmoviliza evitando que los microorganismos se difundan facilitando su recuperación. Es un método económico porque los biocatalizadores son caros. Otras ventajas son:
I. Mayor concentración celular, lo que permite una mayor actividad. II. No hay necesidad de remover las células o recircularlas lo que hace la
extracción del producto más eficiente. III. Las tasas de flujo pueden ser optimizadas para lograr mejores cinéticas. IV. El riesgo de contaminación se reduce debido a la alta densidad celular y
la dilución es más rápida.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
9
V. Aumento de la estabilidad de las células debido a la inmovilización lo que permite su uso continuo o reutilización en operaciones batch.
3.2 MICROCONTROLADORES
3.2.1 El microcontrolador
Formalmente un microcontrolador se describe como un circuito integrado o chip que incluye en su interior las tres unidades funcionales de un ordenador: CPU. Memoria. Unidades de E/S.
Es decir, se trata de una computadora completa en un solo circuito integrado. Aunque sus prestaciones son limitadas, además de dicha integración, su característica principal es su alto nivel de especialización. Mientras se pueden tener uno o dos microprocesadores de propósito general en casa, se pueden tener varios microcontroladores distribuidos entre los electrodomésticos del hogar. Pueden encontrarse en casi cualquier dispositivo eléctrico como automóviles, lavadoras, hornos de microondas, teléfonos, etc. Un microcontrolador difiere de una CPU normal, debido a que es más fácil convertirla en una computadora en funcionamiento, con un mínimo de chips externos de apoyo. La idea es que el chip se coloque en el dispositivo, conectado a la fuente de energía y de información que necesite. Un microprocesador tradicional no permitirá hacer esto, ya que espera que todas estas tareas sean manejadas por otros chips. Por ejemplo, un microcontrolador típico tendrá un generador de reloj integrado y una pequeña cantidad de memoria RAM y ROM/EPROM/EEPROM, significando que para hacerlo funcionar, todo lo que se necesita son unos pocos programas de control y un cristal de sincronización. Los microcontroladores disponen generalmente también de una gran variedad de dispositivos de entrada/salida, como convertidores de analógico a digital, temporizadores, UARTs y buses de interfaz serie especializados.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
10
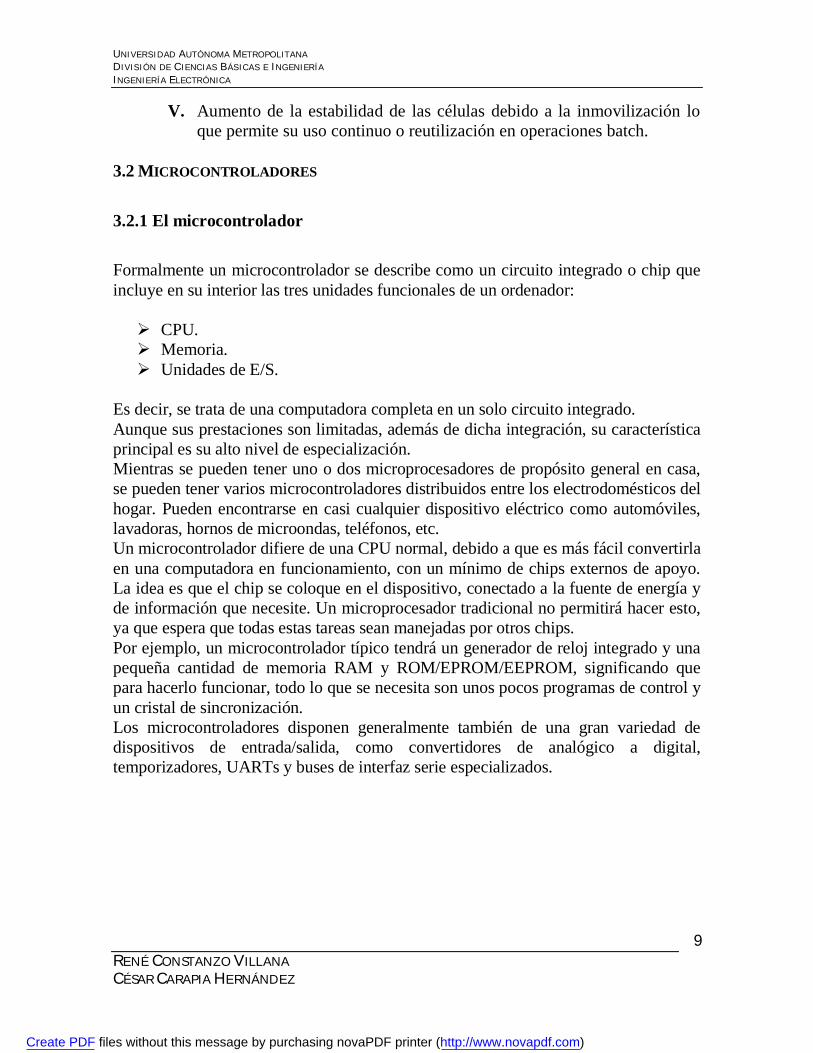
Figura 3.1 Diagrama a bloques de un microcontrolador
El Microcontrolador esta formado por un Microprocesador y el conjunto de subsistemas que normalmente requiere un microprocesador: entrada y salida.
3.2.2 Microcontroladores más comunes.
Dentro de esta gama de microcontroladores tenemos una gran variedad de ellos fabricados por diversas empresas como son:
AMCC Altera Atmel Charmed Labs Cypress MicroSystems Dallas Semiconductor Freescale Semiconductor Fujitsu Holtek Infineon Intel Lattice Semiconductor Microchip Technology National Semiconductor
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
11
NEC Parallax Philips Semiconductors Rabbit Semiconductor Renesas Technology Silabs Silicon Motion STMicroelectronics Texas Instruments Toshiba Western Design Center Ubicom Xemics Xilinx ZiLOG
Dentro de los fabricantes de microcontroladores mencionados anteriormente podríamos destacar a Intel empresa líder mundialmente conocida por su trabajo en el desarrollo de microcontroladores y microprocesadores innovadores y vanguardista, esta empresa es una de las empresas más conocidas en este ramo debido a que ellos fabrican microprocesadores que son mundialmente conocidos por su utilización como el cerebro de las computadoras personales. Para nuestro sistema no necesitamos utilizar un microprocesador debido a que para el fin perseguido no se necesita un controlador tan poderoso y difícil de programar como sería un Intel. 3.2.3 Arquitectura de microcontroladores.
Estos chip tiene varios tipos de arquitecturas, entre ellas se destaca la mas tradicional
VON NEUMANN, en la cual la unidad central de proceso (CPU), esta conectada a una memoria única donde se guardan las instrucciones del programa y los datos.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
12
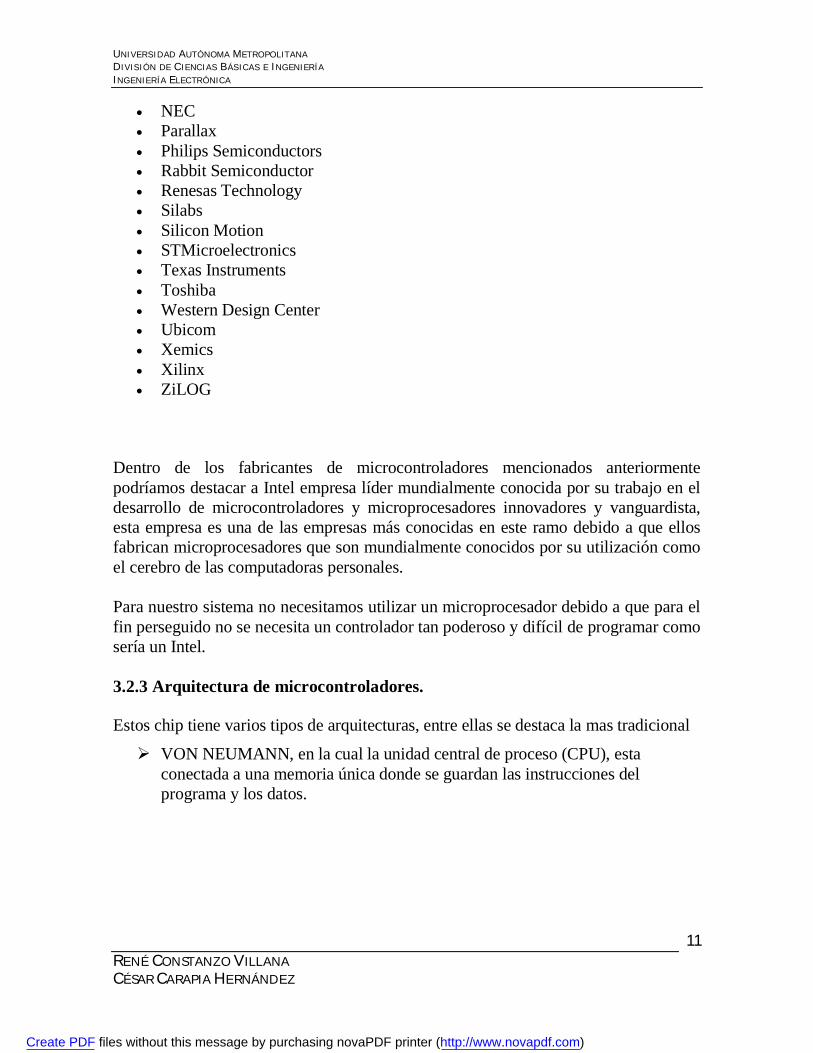
Figura 3.2 Diagrama a bloques arquitectura Von Newmann.
HARVARD tiene la unidad central de proceso (CPU) conectada a dos memorias (una con las instrucciones y otra con los datos) por medio de dos buses diferentes.
Figura 3.3 Diagrama a bloques arquitectura Harvard.
3.2.4 Microcontroladores PIC.
Los 'PIC' son una familia de microcontroladores tipo RISC(Reduced instruction set controller) fabricados por Microchip Technology Inc. El nombre actual no es un acrónimo. En realidad, el nombre completo es PICmicro, aunque generalmente se utiliza como Peripheral Interface Controller (Controlador de Interfaz Periférico). Las características más representativas de los PIC. 1ª. La arquitectura del procesador sigue el modelo Harvard
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
13
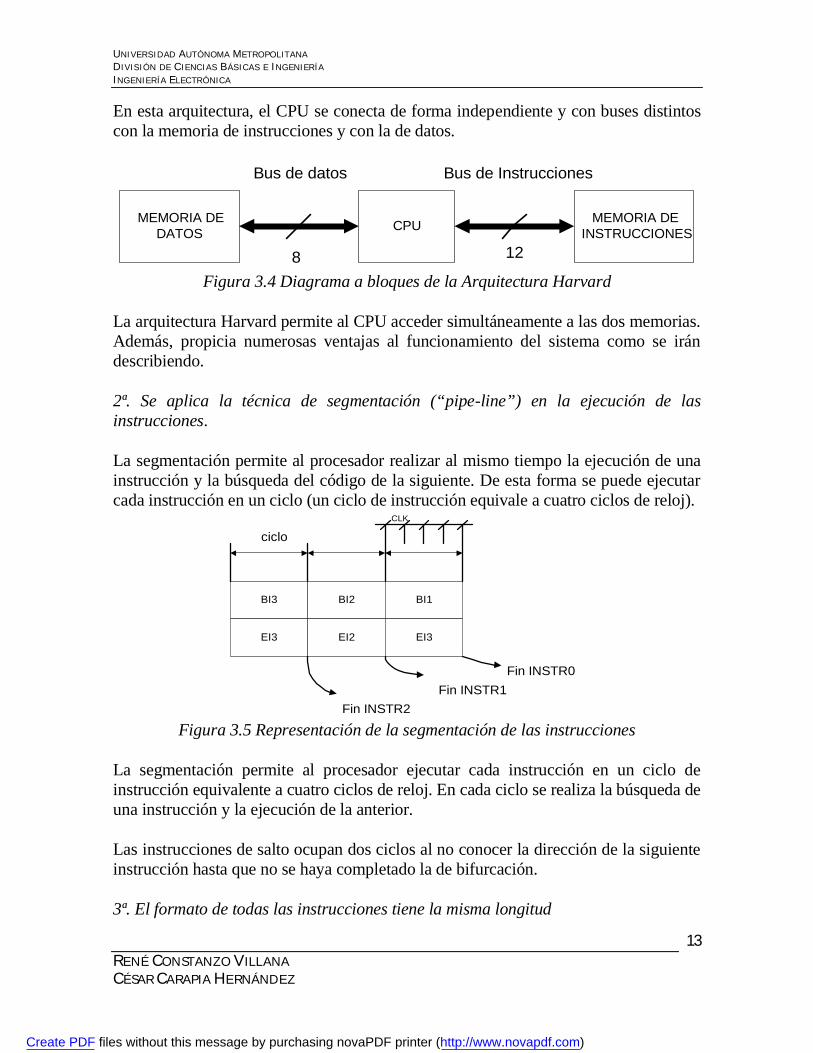
En esta arquitectura, el CPU se conecta de forma independiente y con buses distintos con la memoria de instrucciones y con la de datos.
MEMORIA DEDATOS CPU MEMORIA DE
INSTRUCCIONES
8 12
Bus de datos Bus de Instrucciones
Figura 3.4 Diagrama a bloques de la Arquitectura Harvard
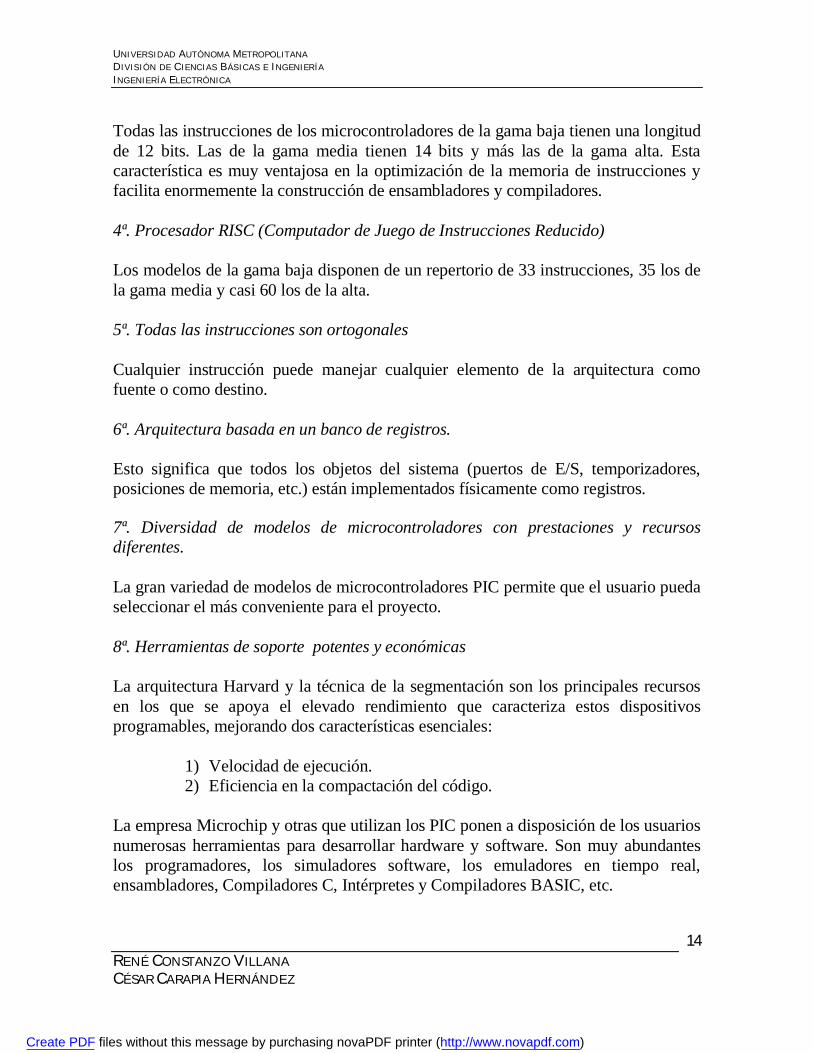
La arquitectura Harvard permite al CPU acceder simultáneamente a las dos memorias. Además, propicia numerosas ventajas al funcionamiento del sistema como se irán describiendo. 2ª. Se aplica la técnica de segmentación (“pipe-line”) en la ejecución de las instrucciones. La segmentación permite al procesador realizar al mismo tiempo la ejecución de una instrucción y la búsqueda del código de la siguiente. De esta forma se puede ejecutar cada instrucción en un ciclo (un ciclo de instrucción equivale a cuatro ciclos de reloj).
BI3 BI2 BI1
EI3 EI2 EI3
cicloCLK
Fin INSTR0Fin INSTR1
Fin INSTR2 Figura 3.5 Representación de la segmentación de las instrucciones
La segmentación permite al procesador ejecutar cada instrucción en un ciclo de instrucción equivalente a cuatro ciclos de reloj. En cada ciclo se realiza la búsqueda de una instrucción y la ejecución de la anterior. Las instrucciones de salto ocupan dos ciclos al no conocer la dirección de la siguiente instrucción hasta que no se haya completado la de bifurcación. 3ª. El formato de todas las instrucciones tiene la misma longitud
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
14
Todas las instrucciones de los microcontroladores de la gama baja tienen una longitud de 12 bits. Las de la gama media tienen 14 bits y más las de la gama alta. Esta característica es muy ventajosa en la optimización de la memoria de instrucciones y facilita enormemente la construcción de ensambladores y compiladores. 4ª. Procesador RISC (Computador de Juego de Instrucciones Reducido) Los modelos de la gama baja disponen de un repertorio de 33 instrucciones, 35 los de la gama media y casi 60 los de la alta. 5ª. Todas las instrucciones son ortogonales Cualquier instrucción puede manejar cualquier elemento de la arquitectura como fuente o como destino. 6ª. Arquitectura basada en un banco de registros. Esto significa que todos los objetos del sistema (puertos de E/S, temporizadores, posiciones de memoria, etc.) están implementados físicamente como registros.
7ª. Diversidad de modelos de microcontroladores con prestaciones y recursos diferentes. La gran variedad de modelos de microcontroladores PIC permite que el usuario pueda seleccionar el más conveniente para el proyecto. 8ª. Herramientas de soporte potentes y económicas La arquitectura Harvard y la técnica de la segmentación son los principales recursos en los que se apoya el elevado rendimiento que caracteriza estos dispositivos programables, mejorando dos características esenciales:
1) Velocidad de ejecución. 2) Eficiencia en la compactación del código.
La empresa Microchip y otras que utilizan los PIC ponen a disposición de los usuarios numerosas herramientas para desarrollar hardware y software. Son muy abundantes los programadores, los simuladores software, los emuladores en tiempo real, ensambladores, Compiladores C, Intérpretes y Compiladores BASIC, etc.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
15
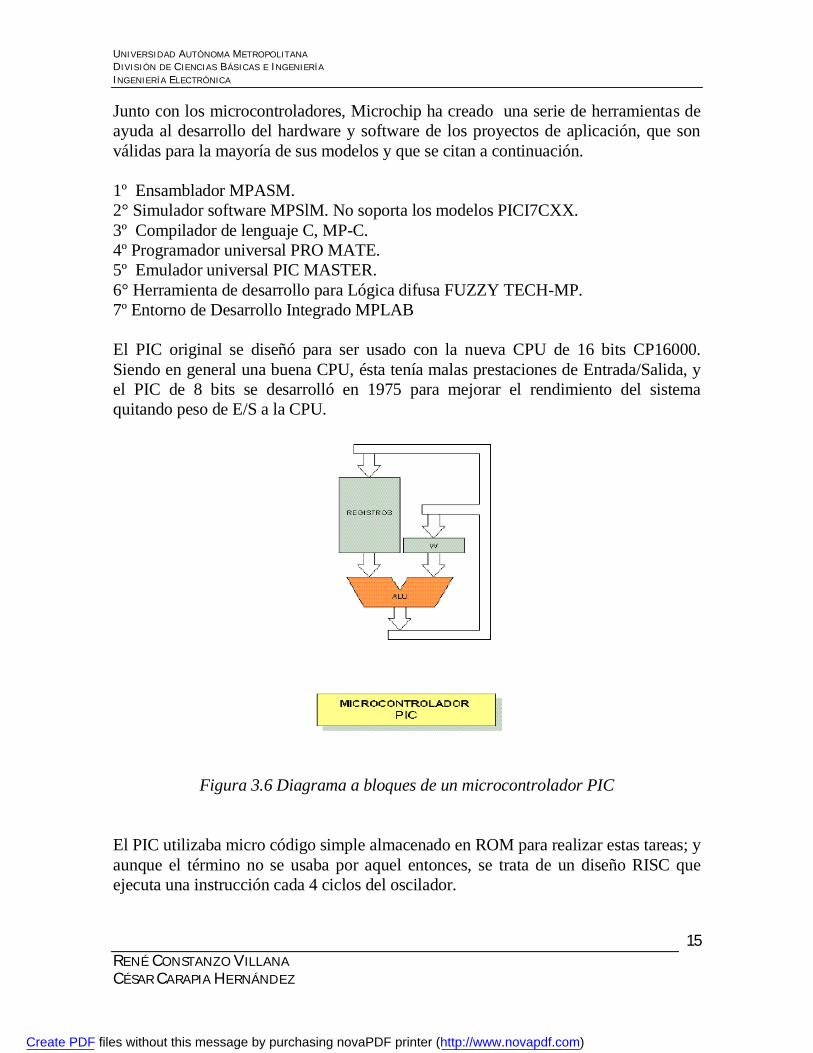
Junto con los microcontroladores, Microchip ha creado una serie de herramientas de ayuda al desarrollo del hardware y software de los proyectos de aplicación, que son válidas para la mayoría de sus modelos y que se citan a continuación. 1º Ensamblador MPASM. 2° Simulador software MPSlM. No soporta los modelos PICI7CXX. 3º Compilador de lenguaje C, MP-C. 4º Programador universal PRO MATE. 5º Emulador universal PIC MASTER. 6° Herramienta de desarrollo para Lógica difusa FUZZY TECH-MP. 7º Entorno de Desarrollo Integrado MPLAB El PIC original se diseñó para ser usado con la nueva CPU de 16 bits CP16000. Siendo en general una buena CPU, ésta tenía malas prestaciones de Entrada/Salida, y el PIC de 8 bits se desarrolló en 1975 para mejorar el rendimiento del sistema quitando peso de E/S a la CPU.
Figura 3.6 Diagrama a bloques de un microcontrolador PIC El PIC utilizaba micro código simple almacenado en ROM para realizar estas tareas; y aunque el término no se usaba por aquel entonces, se trata de un diseño RISC que ejecuta una instrucción cada 4 ciclos del oscilador.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
16
En 1985, dicha división de microelectrónica de General Instruments se convirtió en una filial y el nuevo propietario canceló casi todos los desarrollos, que para esas fechas la mayoría estaban obsoletos. El PIC, sin embargo, se mejoró con EPROM para conseguir un controlador de canal programable. Hoy en día multitud de PICs vienen con varios periféricos incluidos (módulos de comunicación serie, UARTs, núcleos de control de motores, etc.) y con memoria de programa desde 512 a 32.000 palabras (una palabra corresponde a una instrucción en ensamblador, y puede ser 12, 14 o 16 bits, dependiendo de la familia específica de PICmicro). Para nuestro sistema hemos decidido utilizar un microcontrolador diseñado y fabricado por Microchip este microcontrolador esta incluido dentro de esta familia de microcontroladores, nos referimos específicamente al microcontrolador PIC16F877. 3.2.5 Justificación de la utilización de un microcontrolador PIC
Debido a su reducido numero de instrucciones y a su fácil programación un PIC es ideal para diseñar el control de nuestro sistema de monitoreo de variables. Además de que lo que perseguimos es un sistema que no ocupe gran espacio y no necesite ser alimentado con grandes cantidades de energía, el PIC es optimo en este ámbito ya que un PIC puede ser alimentado con una batería de 9 volts conseguida comercialmente esto hace al PIC ideal para nuestro desarrollo. 3.2.6 El microcontrolador PIC 16F877.
En esta parte hablaremos a grandes rasgos acerca de las características del microcontrolador 16F877 el cual fue utilizado en el desarrollo de nuestro sistema. El microcontrolador PIC16F877 de Microchip pertenece a familia de microcontroladores de 8 bits que tienen las siguientes características generales: Arquitectura Harvard.
Tecnología RISC.
Tecnología CMOS.
Estas características se conjugan para lograr un dispositivo altamente eficiente en el uso de la memoria de datos y programa y por lo tanto en la velocidad de ejecución. Una característica importante a mencionar acerca de este dispositivo es que la manera en que se polariza es realmente bastante sencilla lo único que se necesita es una fuente de corriente directa de 5V.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
17
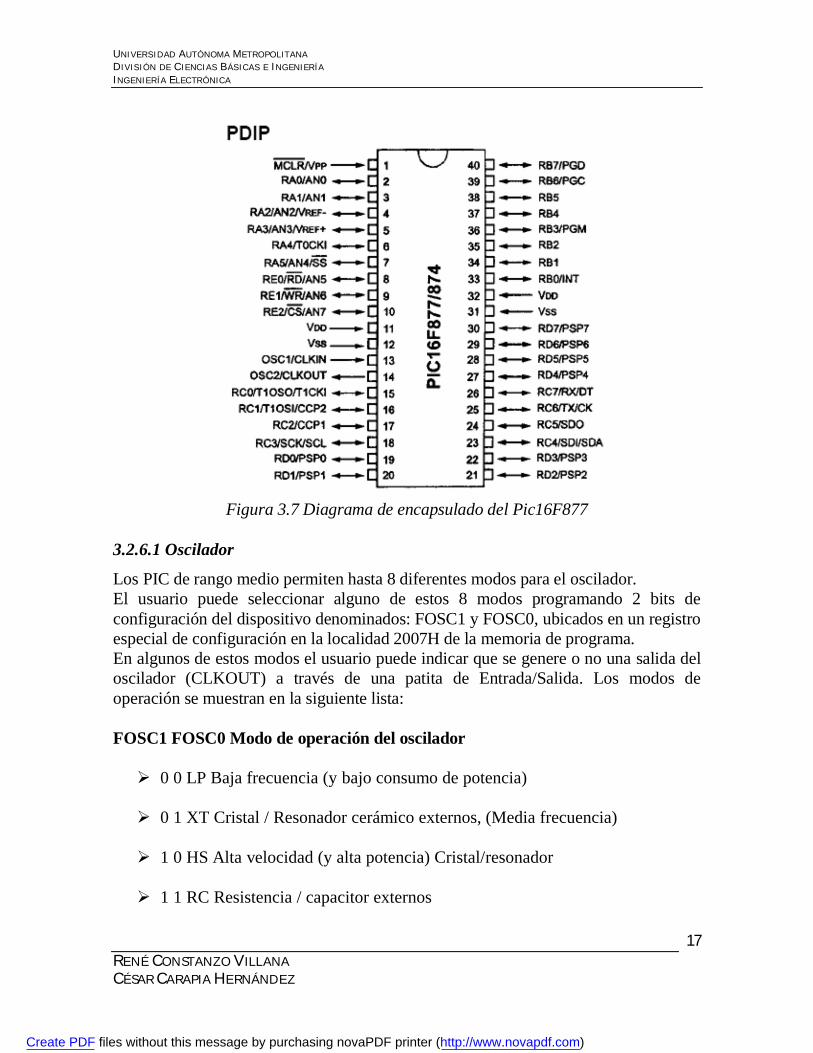
Figura 3.7 Diagrama de encapsulado del Pic16F877
3.2.6.1 Oscilador
Los PIC de rango medio permiten hasta 8 diferentes modos para el oscilador. El usuario puede seleccionar alguno de estos 8 modos programando 2 bits de configuración del dispositivo denominados: FOSC1 y FOSC0, ubicados en un registro especial de configuración en la localidad 2007H de la memoria de programa. En algunos de estos modos el usuario puede indicar que se genere o no una salida del oscilador (CLKOUT) a través de una patita de Entrada/Salida. Los modos de operación se muestran en la siguiente lista: FOSC1 FOSC0 Modo de operación del oscilador 0 0 LP Baja frecuencia (y bajo consumo de potencia)
0 1 XT Cristal / Resonador cerámico externos, (Media frecuencia)
1 0 HS Alta velocidad (y alta potencia) Cristal/resonador
1 1 RC Resistencia / capacitor externos
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
18
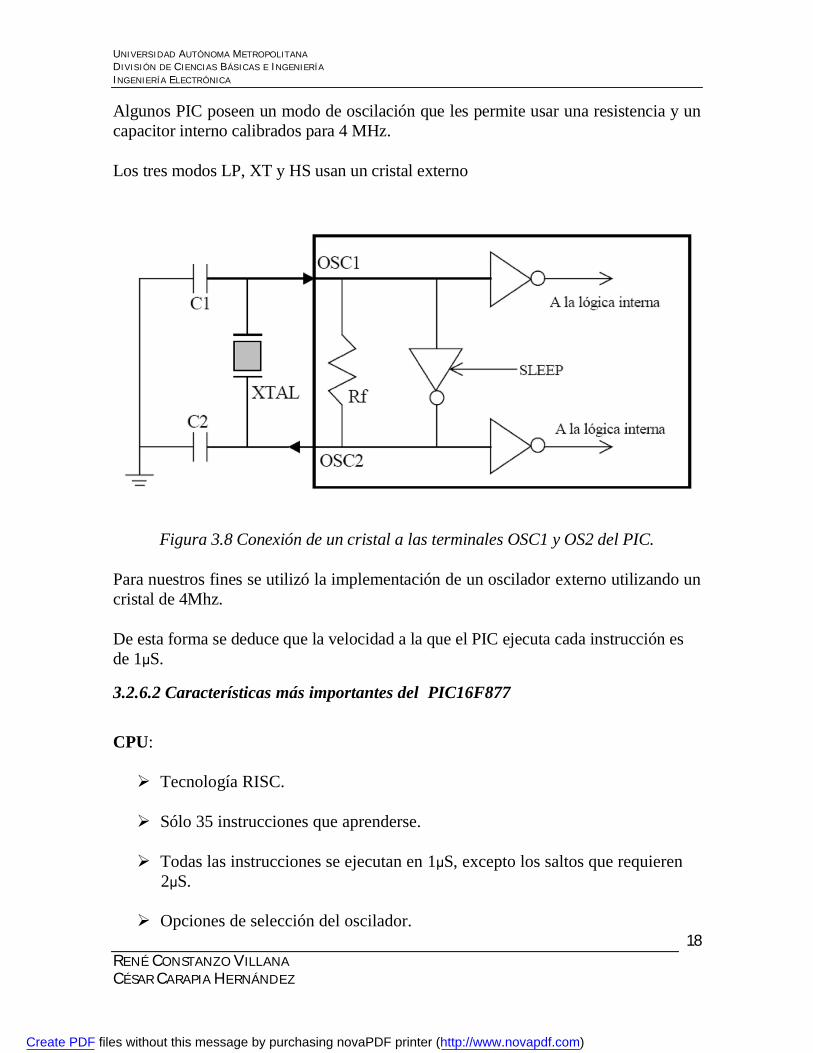
Algunos PIC poseen un modo de oscilación que les permite usar una resistencia y un capacitor interno calibrados para 4 MHz. Los tres modos LP, XT y HS usan un cristal externo
Figura 3.8 Conexión de un cristal a las terminales OSC1 y OS2 del PIC. Para nuestros fines se utilizó la implementación de un oscilador externo utilizando un cristal de 4Mhz. De esta forma se deduce que la velocidad a la que el PIC ejecuta cada instrucción es de 1µS.
3.2.6.2 Características más importantes del PIC16F877
CPU: Tecnología RISC.
Sólo 35 instrucciones que aprenderse.
Todas las instrucciones se ejecutan en 1µS, excepto los saltos que requieren
2µS. Opciones de selección del oscilador.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
19
Memoria: Hasta 8k x 14 bits de memoria Flash de programa.
Hasta 368 bytes de memoria de datos (RAM).
Hasta 256 bytes de memoria de datos EEPROM.
Lectura/escritura de la CPU a la memoria flash de programa.
Protección programable de código.
Reset e interrupciones:
Hasta 14 fuentes de interrupción.
Reset de encendido (POR).
Temporizador de encendido (PWRT).
Temporizador de arranque del oscilador (OST).
Sistema de vigilancia Watchdog timer.
Otros:
Modo SLEEP de bajo consumo de energía.
Programación y depuración serie “In-Circuit” (ICSP) a través de dos patitas.
Rango de voltaje de operación de 2.0 a 5.5 volts.
Bajo consumo de potencia:
Menos de 0.6mA a 3V, 4 MHz 20 µA a 3V, 32 Khz. Menos de 1µA corriente en modo SLEEP.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
20
3.2.6.3 Periféricos
3.2.6.3.1 Puertos de entrada/salida: Cando hablamos de los periféricos es importante mencionar que el PIC16F877 tiene 5 puertos de entrada salida, denominados como sigue: Puerto A (Consta de 5 bits).
Puerto B (Consta de 8 bits).
Puerto C (Consta de 8 bits).
Puerto D (Consta de 8 bits).
Puerto E (Consta de 3 bits).
Vale la pena mencionar que algunos de los pines correspondientes a los puertos de entrada salida están multiplexados con la finalidad de utilizarlos de una manera diferente. Por ejemplo los pines correspondientes a los bits RA0 y RA1 pueden ser configurados también como entradas analógicas para ser utilizadas como las entradas a un modulo de conversión analógica digital. De esta misma forma el bit correspondiente a RB0 es también la entrada correspondiente a la habilitación de la interrupción externa. Análogamente los bits RC7 y RC1 están multiplexados para ser usados como los bits utilizados para la recepción y transmisión serial. 3.2.6.3.2 Convertidor analógico/Digital: Cuando hablamos de los periféricos que maneja el PIC16F877 haremos mención de uno de los más útiles para nuestra aplicación específica. Nos referimos a1 Convertidor Analógico/Digital el cual tiene una resolución de 10 bits. El modulo de conversión analógica/digital consta de 4 registros.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
21
ADRESH Guarda la parte alta del resultado de la conversión. ADRESL Guarda la parte baja del resultado de la conversión.
ADCON 0 Registro de control. ADCON 1 Registro de control.
El registro ADCON0 controla la operación de el modulo de conversión analógica/digital. Mientras que el registro ADCON1 configura las funciones de los pines de los puertos. Los pines de los puertos pueden ser configurados como entradas analógicas ó también como salidas digitales. Como los registros de este microcontrolador son de 8 bits y por ende el resultado de la conversión no podría ser depositado solo en un registro ya que esta conversión está dada por 10 bits por esta causa es que el resultado es depositado en 2 y no en 1 registro, estos registros son ADRESH Y ADRESL. 3.2.6.3.3 Puerto serial: El modulo USART es uno de los dos módulos seriales de entrada salida con los que cuenta este dispositivo este es conocido como interfaz de comunicación serial. Este puede ser configurado como un sistema full duplex (Hace posible comunicarse con computadoras personales) ó como un sistema half duplex. (Hace posible comunicarse con dispositivos tales como convertidores ADC ó DAC). El módulo de USART utiliza el registro TXSTA como registro de control y para monitorear el estado de la transmisión. Además se utiliza el registro denominado el cual monitorea el estado de la recepción y se utiliza también como un registro de control.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
22
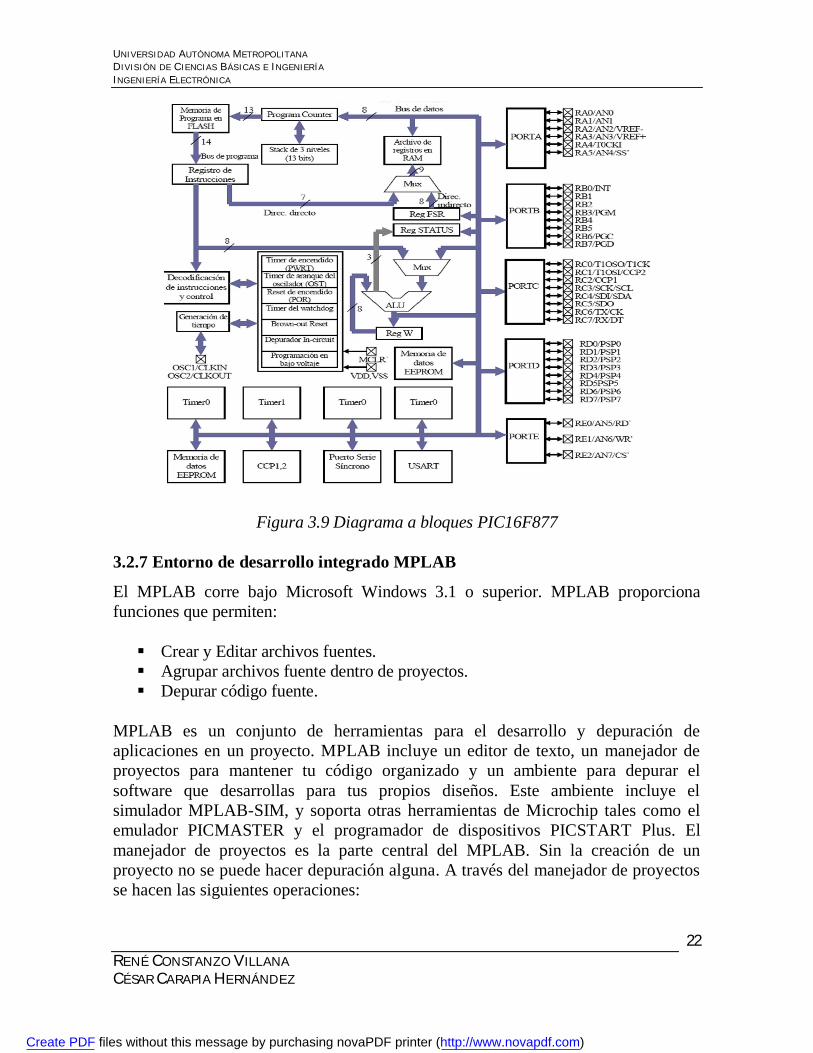
Figura 3.9 Diagrama a bloques PIC16F877 3.2.7 Entorno de desarrollo integrado MPLAB
El MPLAB corre bajo Microsoft Windows 3.1 o superior. MPLAB proporciona funciones que permiten: Crear y Editar archivos fuentes. Agrupar archivos fuente dentro de proyectos. Depurar código fuente.
MPLAB es un conjunto de herramientas para el desarrollo y depuración de aplicaciones en un proyecto. MPLAB incluye un editor de texto, un manejador de proyectos para mantener tu código organizado y un ambiente para depurar el software que desarrollas para tus propios diseños. Este ambiente incluye el simulador MPLAB-SIM, y soporta otras herramientas de Microchip tales como el emulador PICMASTER y el programador de dispositivos PICSTART Plus. El manejador de proyectos es la parte central del MPLAB. Sin la creación de un proyecto no se puede hacer depuración alguna. A través del manejador de proyectos se hacen las siguientes operaciones:
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
23
Crear un proyecto. Añadir un archivo de código fuente a un proyecto. Ensamblar o compilar código fuente. Editar código fuente. Reconstruir todos los archivos fuente, o compilar un archivo sencillo. Depurar el código fuente
El Editor de MPLAB permite a los programadores escribir y editar código fuente para las familias de microcontroladores PIC16/17, así como otros archivos de texto. El Ensamblador Universal de Microcontroladores PIC16/17 MPASM ofrece grandes características completamente desarrolladas, ensamblado condicional y de diferentes fuentes y lista de formatos. MPASM permite generar varios formatos de código objeto que soportan las herramientas de desarrollo de Microchip así como los programadores relacionados sin salir de MPLAB. Simulador MPLAB-SIM permite aislar problemas de código y depurar diseños en los microcontroladores PIC16/17. Simula las funciones principales así como la mayoría de los periféricos de las familias de microcontroladores PIC16/17. Relativo al software el MPLAB funciona correctamente en un ambiente operativo de Windows, ya que soporta el entorno de multitareas. Debido a que MPLAB tiene capacidades de emulación de multiprocesador, soporta DDE (intercambio dinámico de datos) con programas cliente, los datos recolectados con MPLAB pueden ser intercambiados con más programas. Para tomar ventaja de las características de emulación del sistema, se debe instalar el software de MPLAB en una computadora con la siguiente configuración (mínimo):
PC 386 o superior. Se recomienda Pentium. 4 MB de memoria en RAM, 16MB recomendado. 8 MB de espacio libre en disco duro, 20 MB recomendado. Monitor VGA o Súper VGA. Microsoft Windows 3.1 o superior
El modo animado es un método en que el procesador camina automáticamente paso-paso. El simulador ejecuta pasos sencillos mientras corre, pero solamente actualiza los valores de los registros cuando es detenido. Para ir observando los cambios en las ventanas de Registros de Funciones Especiales y Archivos de Registros se utiliza en modo animado. El modo animado corre más lento que la función RUN, pero permite ver los cambios en los valores de los registros. 3.2.8 El Amplificador Operacional
Los primeros años del amplificador operacional no fueron los de un circuito integrado de 8 patitas. Este amplificador operacional era un tubo al vacío. El Sr.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
24
George Philbrick, que trabajaba en los Huntington Engeneering Labs, y a quien se le atribuye su invención, lo introdujo al mercado en el año 1948. La idea principal de estos "operacionales" originales era la de ser utilizados en computadoras analógicas, para sumar, restar, multiplicar y realizar operaciones más complejas. Fue la empresa Fairchild la que en los años 1964 y 1967 introdujo al mercado los conocidos Amplificadores operacionales 702, 709 y 741.Y la National Semiconductor hizo lo mismo con el 101/301. Estos circuitos integrados son muy versátiles, de bajo precio, tamaño pequeño, con excelentes características y redujeron el diseño de un amplificador a la adición de unas resistencias. Con el paso de los años y la mejora en la tecnología de fabricación, Los amplificadores operacionales mejoraron notablemente. En su configuración interna se reemplazaron unos transistores bipolares por transistores de efecto de campo (JFET). Estos amplificadores JFET están a las entradas del amplificador operacional incrementándose así la impedancia de entrada de este. El operacional puede ahora amplificar señales que pueden tener la amplitud de la fuente que los alimenta y tomar muy poca corriente de la señal de entrada. Los transistores MOS (semiconductor de oxido metálico) se pusieron en los circuitos de salida. El primer amplificador (BIFET) con transistores de efecto de campo fue en LF356. El amplificador operacional BIMOS como el CA3130 tiene entradas bipolares y salida MOS (de allí viene el nombre). Estos últimos amplificadores son mas rápidos y tiene unas respuesta mejor a las altas frecuencias que el conocido 741. Hay versiones de varios operacionales en un solo integrado como el LM358 con 2 y el LM324 con 4 amplificadores operacionales juntos En algún momento se tuvo que especializar el amplificador de propósito general que hasta ahora se había utilizado y salieron al mercado una gran variedad del original: Capacidad de alta corriente, alto voltaje o ambos Amplificadores múltiples Amplificadores de ganancia programable Amplificadores de instrumentación y control automotriz Circuitos integrados para comunicaciones Circuitos integrados para radio / audio / video
Los amplificadores operacionales de propósito general no dejarán de usarse debido a su gran demanda e infinidad de posibles aplicaciones, pero los amplificadores operacionales de propósito especifico como los de la lista anterior seguirán aumentando con el avance de la tecnología.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
25
3.2.9 Termopares
Un termopar es un dispositivo en estado sólido que se utiliza para convertir la energía en voltaje. Consta de dos metales diferentes empalmados en una juntura. Estos dos metales están conectados en dos diversos ensambles, uno para la medida de la temperatura y el otro para la referencia. La diferencia de la temperatura entre los dos ensambles es detectada midiendo el cambio en el voltaje (fuerza electromotriz, F.E.M.) a través de los metales disímiles en el ensamble de la medida de la temperatura. Los termopares se emplean como sensores de temperatura y para su fabricación pueden utilizarse materiales tales como: hierro-constantano, cobre- constantano o antimonio-bismuto. Cuando se procedió al siguiente paso de los materiales compuestos, se extendió en forma significativa nuestras capacidades para diseñar materiales. Secuencialmente los materiales han sido cada vez más complejos y de esta forma nos han proveído de una versatilidad cada vez mayor. Los materiales compuestos tienen múltiples orígenes los cuales pueden complementarse de manera conveniente con los conceptos de estructura-propiedades. Las decisiones para la selección de los materiales que se van a exponer a un ambiente con temperaturas elevadas, cambios de temperaturas o gradientes termales requieren que el ingeniero de diseño tenga una comprensión amplia de las características termales de los materiales que componen estos instrumentos. Los termopares están entre los sensores de temperatura más fáciles de utilizar y de obtener, y se utilizan extensamente en ciencia e industria. La elección del tipo óptimo del termopar se basa en la temperatura de aplicación, el medio al que será expuesto, la vida útil necesaria, la exactitud requerida y el costo. El valor de la F.E.M. depende de la naturaleza del material y del gradiente de temperatura entre sus extremidades. En el caso de un material homogéneo, el valor de la F.E.M. no depende de la distribución de temperatura a lo largo del conductor, pero si, como hemos dicho anteriormente, de la diferencia de temperatura entre sus extremidades. Este fenómeno es básico para poder entender la termoelectricidad y su aplicación en la medición de temperatura. Tres efectos principales están implicados en un circuito del termopar: los efectos de Seebeck, de Peltier y de Thomson. Consideremos dos metales denominados genéricamente “A” y “B” sometidos a la misma diferencia de temperatura entre sus extremidades. En cada uno de ellos surgirá una fuerza electromotriz. Se comprobó entonces que cuando los metales son unidos en una de las extremidades de acuerdo con la figura siguiente, se mide una fuerza electromotriz entre las extremidades separadas, cuyo valor corresponde a la diferencia entre los valores de la F.E.M. que surge en cada uno de los metales. A este fenómeno se le conoce como efecto Seebeck y la configuración de la figura de arriba corresponde al sensor de temperatura conocido como termopar o par termométrico. Los elementos “A” y “B” que constituyen el termopar se denominan termoelementos y, a raíz de la polaridad de la fuerza electromotriz EAB, “A” es el
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
26
termoelemento positivo y “B” el termoelemento negativo del termopar “AB”. En la configuración de un termopar la extremidad en la cual se hace la unión de los termoelementos se denomina junta de medición, mientras que la otra se denomina junta de referencia. Si la temperatura de la junta de referencia se fija en 0ºC, entonces el valor de la F.E.M. dependerá solamente de la temperatura de la junta de medición “T1”, estableciendo la relación T a EAB (T). El conocimiento de esta relación permite utilizar el termopar como un sensor de temperatura. El cambio de F.E.M. en el material con respecto a un cambio de temperatura se llama el coeficiente de Seebeck o la sensibilidad termoeléctrica. La F.E.M. reversible y asociada con los cambios en temperatura se llama el efecto de Peltier. Finalmente, el efecto de Thomson relaciona el gradiente y la F.E.M. termales reversibles en un conductor homogéneo. Si las funciones del coeficiente de Seebeck de los dos materiales del alambre del termopar están pre-calibradas y la temperatura de referencia fijada (generalmente por un baño de hielo 0°C), la temperatura en la extremidad de la punta de prueba se convierte en la única desconocida y se puede relacionar directamente con la lectura del voltaje. La ley del circuito homogéneo resalta el hecho que si el termopar es formado por termoelementos homogéneos, el valor de la fuerza electromotriz generada depende solamente de la diferencia de temperatura entre la junta de medición y la junta de referencia. Esta información que ya ha sido citada, es nuevamente presentada para resaltar que el valor de la fuerza electromotriz no depende del largo del termopar, ni del diámetro de los termoelementos que componen el termopar, ni de la distribución de temperatura a lo largo de él. Sin embargo, como consecuencia del uso del termopar en la medición de la temperatura de un proceso, es muy frecuente que con el tiempo el termopar presente heterogeneidad que traerá como consecuencia la alteración del valor de la F.E.M. (suponiendo que la temperatura del proceso se mantenga constante), que empezará a depender inclusive del perfil de la temperatura a lo largo del termopar. Un termopar con termoelementos de diámetros menores se vuelve heterogéneo más rápidamente y de forma tanto más intensa a temperaturas muy altas. La ley de las temperaturas intermedias, muestra una propiedad adicional de la fuerza electromotriz termoeléctrica en relación con la diferencia de temperatura entre sus extremidades. Normalmente la junta de referencia se encuentra a la temperatura ambiente y querer mantenerla a 0ºC no es nada práctico, por ejemplo, en una planta industrial. Sin embargo, es posible sortear esa dificultad utilizando una compensación de la temperatura ambiente mediante la adición a la señal del termopar de una fuerza electromotriz con un valor correspondiente a aquél que el termopar generaría con su junta de medición a temperatura ambiente y su junta de referencia a 0ºC, o sea,:
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
27
EAB (T) = EAB (T - 0ºC) = EAB (T - TAMBIENTE) + EAB (TAMBIENTE - 0ºC)
1. La ley de los materiales Intermedios pone en evidencia dos situaciones muy importantes: La inserción de un material “C” en el termopar “AB” no altera el valor de la fuerza electromotriz generada por el termopar, mientras no haya diferencia de temperatura entre las extremidades de contacto del material “C” con el termopar.
2. La relación entre las fuerzas electromotrices generadas por los termopares “AC”, “BC” y “AB”, tiene una aplicación de gran importancia, ya que este fenómeno da la posibilidad de conocer el comportamiento termoeléctrico de cualquier termoelemento en relación con un termoelemento de referencia; y esto se efectúa durante el control de producción de aleaciones termoeléctricas que constituirán los diversos tipos de termopares utilizados. El termoelemento adoptado como referencia, es el de platino con alto contenido de pureza. La asociación de dos termopares en serie verifica que en esta configuración el valor de la fuerza electromotriz termoeléctrica entre las extremidades del circuito es la suma de las fuerzas electromotrices generadas en cada uno de los termopares. Esta asociación puede efectuarse con cualquier número de termopares si T1 = T2. y utilizarse como un “amplificador”. En la conexión de termopares en oposición el valor de la fuerza electromotriz termoeléctrica entre las extremidades es igual a la diferencia entre los valores de las fuerzas electromotrices generadas en cada uno de los termopares y su mayor utilidad es la de medir la diferencia de temperatura entre dos puntos. En la asociación de termopares en paralelo el valor de la fuerza electromotriz de la asociación es igual a la media aritmética de las fuerzas electromotrices generadas en cada uno de los termopares y el resultado corresponde a la temperatura media de las temperaturas T1 y T2. Cuando se introduce un generador en un circuito formado por un par termoeléctrico con ambas extremidades unidas y la misma temperatura inicial; al circular una energía eléctrica “I” por el circuito, se observará que en una de las juntas ocurre un enfriamiento del mismo valor. Al invertirse el sentido de la energía eléctrica, también se invierte el efecto de calentamiento y enfriamiento de las juntas.
3.2.9.1 Termopar convencional.
Esta configuración de termopar corresponde a la más simple y consiste en termoelementos acomodados en aisladores de cerámica que usualmente son denominados mostacillas. Estas mostacillas son producidas con oxido de magnesio (Mg2O) 66,7% con alta conductividad térmica y alta resistencia de aislamiento. La
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
28
junta de medición es montada por soldadura de los termoelementos. Al soldar los termoelementos se produce un material diferente de los que constituyen cada uno de ellos, pero según la ley de los materiales intermedios, no ocurre ningún cambio en la señal del termopar. Según las condiciones a las que se expondrá el termopar, la soldadura podrá ser de tope y entonces precedida de una torsión, con la finalidad de aumentar su resistencia mecánica. En la junta de referencia va instalado un bloque de ligazón con la finalidad de efectuar la conexión entre el termopar y el alambre/cable. A menudo el termopar convencional es montado dentro de un tubo de protección con la finalidad de proteger los termoelementos del ataque del medio en el que es introducido o aun por medidas de seguridad de la planta industrial. Usualmente los tubos de protección son metálicos o fabricados en cerámica según sean las características de la atmósfera y del rango de temperatura extendido a los demás sectores del proceso productivo. Entre los principales motivos que generaron su desarrollo fue la necesidad de un termopar con un tiempo de respuesta menor que el que se obtenía con el termopar convencional. La fabricación de un termopar con aislamiento mineral parte de un termopar convencional montado con un tubo de protección donde todo el conjunto es trefilado. En este proceso los termoelementos quedan aislados entre sí mediante un polvillo compacto de MgO2 y protegidos por una vaina metálica (originalmente el tubo de protección). Después del trefilado, el termopar es sometido a un tratamiento térmico con el objetivo de evaluar las tensiones mecánicas producidas en el trefilado. Los termopares con aislamiento mineral se ensamblan con la junta de medición aislada, puesta a tierra o expuesta. En el Termopar con junta aislada, los termoelementos quedan aislados del medio cuya temperatura será monitoreada. La vaina funciona como un blindaje contra las interferencias electromagnéticas. Su tiempo de respuesta es mayor que el de otros tipos de montaje y la durabilidad y repetitividad son las mejores, pues los termoelementos quedan totalmente protegidos. En el Termopar con junta a tierra, los termoelementos quedan aislados del medio, la vaina no funciona como blindaje y el tiempo de respuesta es mucho menor que el del montaje aislado. En el Termopar con junta expuesta, los termoelementos quedan expuestos al medio y la vaina no funciona como blindaje electrostático. Este tipo de montaje tiene limitaciones en cuanto a la temperatura máxima de operación para mantener las especificaciones del aislamiento. La durabilidad y la repetitividad de los termoelementos son intensamente afectadas a raíz del medio.
3.2.9.2 Tipos de termopares.
Los termopares comerciales se designan por letras (T, E, J, K, R) que identifican los
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
29
materiales que contienen y se especifican generalmente por su sensibilidad o coeficiente térmico (MV/ºC). El tipo E, J, K, y T son termopares de base metálica y se pueden utilizar hasta por encima de 1000°C. El tipo S, R, y B se denominan termopares nobles por poseer platino como elemento básico y se pueden utilizar hasta por encima de 2000°C. Termopar tipo T (Cu- Constantan) Es un termopar adecuado para mediciones en el rango de -200 ºC a 0 ºC. El conductor positivo está hecho de cobre y el negativo, de constantán. Termo elemento positivo: Cu 100% Termo elemento negativo: Cu 55%, Ni 45% Rango de utilización: -270ºC a 400ºC F.E.M. producida: -6,258 mV a 20,872 mV Termopar con aislamiento mineral. El termopar con aislamiento mineral ha sido desarrollado para aplicaciones en el sector nuclear, siendo posteriormente Características: puede utilizarse en atmósferas inertes, oxidables o reductoras. Gracias a la gran homogeneidad con que el cobre puede ser procesado, se obtiene una buena precisión. En temperaturas superiores a 300ºC, la oxidación del cobre se torna muy intensa, lo que reduce su vida útil y ocasiona desvíos en la curva de respuesta original. Termopar tipo J (Fe- Constantan) Termo elemento positivo: Fe 99,5% Termo elemento negativo: Cu 55%, Ni 45% Rango de utilización: -210ºC a 760ºC F.E.M. producida: -8,096 mV a 42,919 mV Características: puede utilizarse en atmósferas neutras, oxidables o reductoras. No se recomienda en atmósferas muy húmedas y a bajas temperaturas el termoelemento positivo se vuelve quebradizo. Por encima de 540ºC el hierro se oxida rápidamente. No se recomienda en atmósferas sulfurosas por encima de 500ºC. Termopar tipo E (Cr- Constantan) Termo elemento positivo: Ni 90%, Cr 10%
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
30
Termo elemento negativo: Cu 55%, Ni 45% Rango de utilización: -270ºC a 1000ºC F.E.M. producida: -9,835 mV a 76,373 mV Características: Puede utilizarse en atmósferas oxidables, inertes o al vacío, no debe utilizarse en atmósferas alternadamente oxidables y reductoras. Dentro de los termopares a menudo utilizados, es el que posee mayor potencia termoeléctrica, bastante conveniente cuando se desea detectar pequeñas variaciones de temperatura. Termopar tipo K (Cr- Constantan) Termo elemento positivo: Ni 90%, Cr 10% Termo elemento negativo: Ni 95%, Mn 2%, Si 1%, Al 2% Rango de utilización: -270ºC a 1200ºC F.E.M. producida: -6,458 mV a 48,838 mV Características: Puede utilizarse en atmósferas inertes y oxidables. Por su alta resistencia a la oxidación se utiliza en temperaturas superiores a 600ºC y en algunas ocasiones en temperaturas por debajo de 0ºC. No debe utilizarse en atmósferas reductoras y sulfurosas. En temperaturas muy altas y atmósferas pobres en oxigeno ocurre una difusión del cromo, lo que ocasiona grandes desvíos de la curva de respuesta del termopar. Este último efecto se llama “green - root”. Termopar tipo N (Nicrosil - Nisil) Termo elemento positivo: Ni 84,4%, CR 14,2%, Si 1,4% Termo elemento negativo: Ni 95,45% Si 4,40%, Mg 0,15% Rango de utilización: -270ºC a 1300ºC F.E.M. producida: -4,345 mV a 47,513 mV Características: Este nuevo tipo de termopar es un sustituto del termopar tipo K que posee una resistencia a la oxidación superior a éste. En muchos casos también es un sustituto de los termopares a base de platino a raíz de su temperatura máxima de utilización. Se recomienda para atmósferas oxidables, inertes o pobres en oxígeno, ya que no sufre el efecto “green - root”. No debe exponerse a atmósferas sulfurosas. Termopar tipo S Termo elemento positivo: Pt 90%, Rh 10% Termo elemento negativo: Pt 100%
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
31
Rango de utilización: -50ºC a 1768ºC F.E.M. producida: -0,236 mV a 18,693 mV Características: Puede utilizarse en atmósferas inertes y oxidables, presenta estabilidad a lo largo del tiempo en temperaturas elevadas, superiores a las de los termopares no constituidos de platino. Sus termoelementos no deben exponerse a atmósferas reductoras o con vapores metálicos. Nunca deben insertarse directamente en tubos de protección metálicos, pero sí en tubos con protección de cerámica. Fabricado con alúmina (Al2O3) de alto contenido de pureza. Para temperaturas superiores a 1500ºC se utilizan tubos de protección de platino. No se recomienda el uso de los termopares de platino en temperaturas abajo de 0ºC debido a la inestabilidad en la respuesta del sensor. En temperaturas por encima de 1400ºC ocurre crecimiento de granulaciones que los dejan quebradizos. Termopar tipo R Termo elemento positivo: Pt 87%, Rh 13% Termo elemento negativo: Pt 100% Rango de utilización: -50ºC a 1768ºC F.E.M. producida: -0,226 mV a 21,101 mV Características: Posee las mismas características del termopar tipo "S", aunque en algunos casos es preferible el tipo "R" por tener una potencia termoeléctrica mayor en un11%. Termopar tipo B Termo elemento positivo: Pt 70,4%, Rh 29,6% Termo elemento negativo: Pt 93,9%, Rh 6,1% Rango de utilización: 0ºC a 1820ºC F.E.M. producida: 0,000 mV a 13820 mV Características: Puede ser utilizado en atmósferas oxidables, inertes y por un corto espacio de tiempo en el vacío. Normalmente se utiliza en temperaturas superiores a 1400ºC, por presentar menor difusión de rodios que los tipos S y R. A temperaturas abajo de los 50ºC la fuerza electromotriz termoeléctrica generada es muy pequeña. VENTAJAS Bajo costo. No hay piezas móviles, menos probabilidad de romperse.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
32
Amplia gama de temperaturas. Tiempo de reacción razonablemente corto. Capacidad de repetición y exactitud razonables. DESVENTAJAS La sensibilidad es baja, generalmente 50 µV/°C o menos. Este problema se puede mejorar (pero no eliminar) por una mejor señal filtrada, blindando, y por la conversión de análogo a digital. Generalmente la exactitud no es mejor que 0,5 °C. Requiere una temperatura de referencia, generalmente la del hielo (0°C). Por otra parte, los termopares modernos confían en una referencia generada eléctricamente.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
33
4. DESARROLLO EXPERIMENTAL 4.1 MODELADO DEL COMPORTAMIENTO TERMOPAR TIPO “T”
Se realizó el modelado del comportamiento teórico del termopar utilizando una tabla de datos proporcionada por el proveedor. Dicho comportamiento se modeló mediante la realización de una gráfica utilizando el programa Microsoft Excel. 4.1.1 Método de regresión lineal.
La regresión lineal es un modelo matemático mediante el cual es posible inferir datos acerca de una población. Se conoce como regresión lineal ya que usa parámetros lineales. Sirve para poner en evidencia las relaciones que existen entre la temperatura que mide y el voltaje que entrega el termopar. 4.1.2 Tablas y gráficas.
Como se mencionó anteriormente el termopar que se utilizó para sensar la temperatura es un termopar tipo “T”, este dispositivo tiene un comportamiento no lineal con respecto a la temperatura, quiere esto decir que los cambios que presenta su salida son una función de la temperatura, sin embargo dicha relación no es lineal, por esto es que fue necesario realizar toda una caracterización de este dispositivo para saber que tipo de comportamiento presentaba. Dicho análisis se realizo en base a tablas ya elaboradas con anterioridad, estas tablas hacen mención de los voltajes medidos en la salida del termopar después de haber sido expuesto a una determinada temperatura. Es de suma importancia hacer mención de que el análisis mostrado a continuación es un análisis realizado en base a información encontrada en la Internet, esta fue la única fuente información que se tenía hasta antes de tener el sensor para realizar pruebas con él. Después de este análisis se realiza un análisis con valores de voltaje reales obtenidos en el laboratorio después de haber sometido el sensor a diferentes temperaturas.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
34
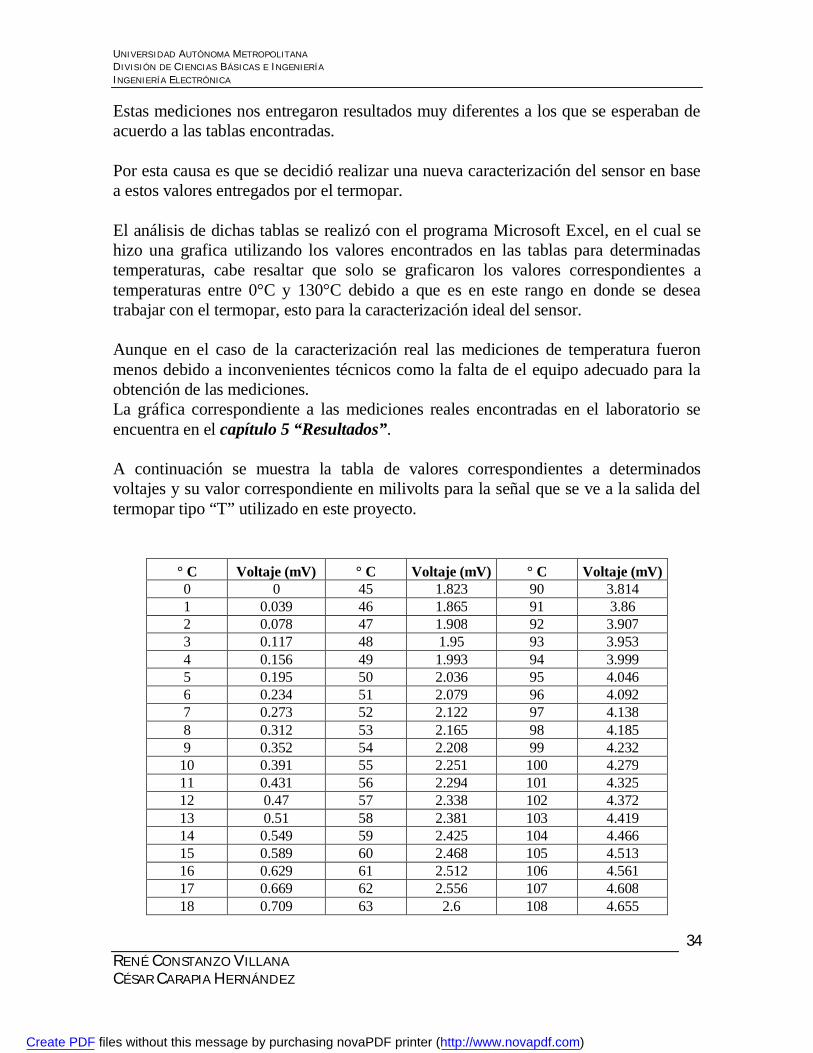
Estas mediciones nos entregaron resultados muy diferentes a los que se esperaban de acuerdo a las tablas encontradas. Por esta causa es que se decidió realizar una nueva caracterización del sensor en base a estos valores entregados por el termopar. El análisis de dichas tablas se realizó con el programa Microsoft Excel, en el cual se hizo una grafica utilizando los valores encontrados en las tablas para determinadas temperaturas, cabe resaltar que solo se graficaron los valores correspondientes a temperaturas entre 0°C y 130°C debido a que es en este rango en donde se desea trabajar con el termopar, esto para la caracterización ideal del sensor. Aunque en el caso de la caracterización real las mediciones de temperatura fueron menos debido a inconvenientes técnicos como la falta de el equipo adecuado para la obtención de las mediciones. La gráfica correspondiente a las mediciones reales encontradas en el laboratorio se encuentra en el capítulo 5 “Resultados”. A continuación se muestra la tabla de valores correspondientes a determinados voltajes y su valor correspondiente en milivolts para la señal que se ve a la salida del termopar tipo “T” utilizado en este proyecto.
° C Voltaje (mV) ° C Voltaje (mV) ° C Voltaje (mV) 0 0 45 1.823 90 3.814 1 0.039 46 1.865 91 3.86 2 0.078 47 1.908 92 3.907 3 0.117 48 1.95 93 3.953 4 0.156 49 1.993 94 3.999 5 0.195 50 2.036 95 4.046 6 0.234 51 2.079 96 4.092 7 0.273 52 2.122 97 4.138 8 0.312 53 2.165 98 4.185 9 0.352 54 2.208 99 4.232
10 0.391 55 2.251 100 4.279 11 0.431 56 2.294 101 4.325 12 0.47 57 2.338 102 4.372 13 0.51 58 2.381 103 4.419 14 0.549 59 2.425 104 4.466 15 0.589 60 2.468 105 4.513 16 0.629 61 2.512 106 4.561 17 0.669 62 2.556 107 4.608 18 0.709 63 2.6 108 4.655
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
35
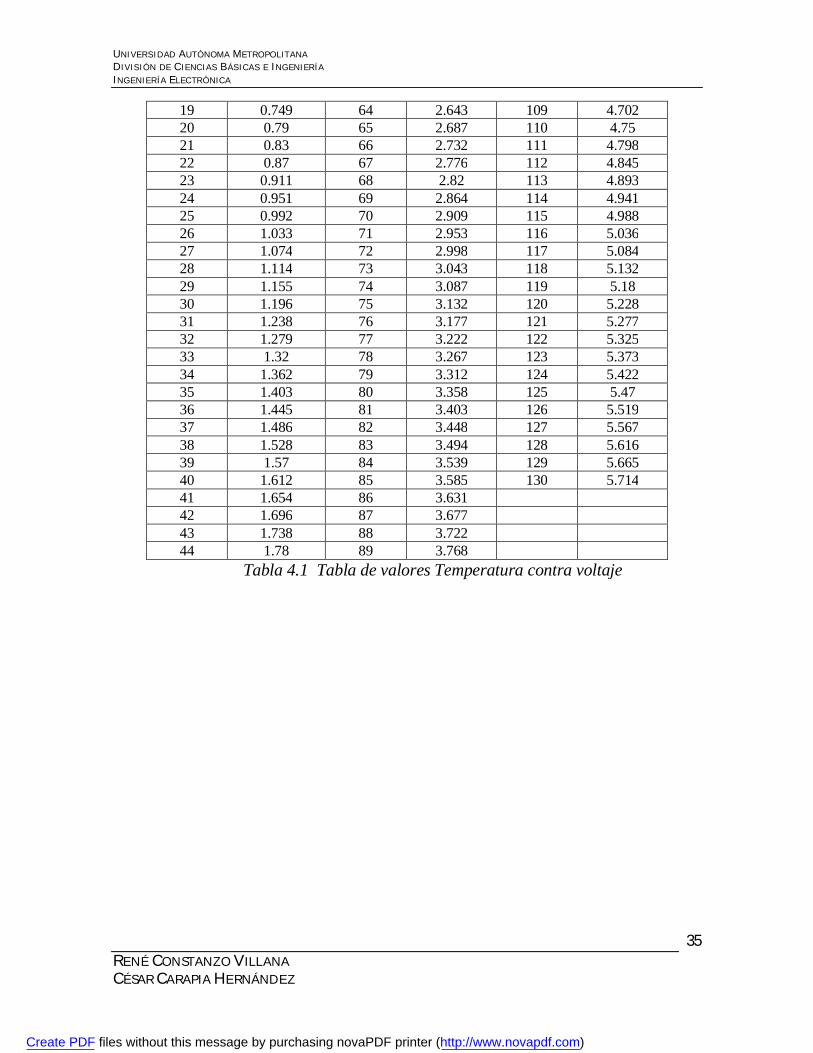
19 0.749 64 2.643 109 4.702 20 0.79 65 2.687 110 4.75 21 0.83 66 2.732 111 4.798 22 0.87 67 2.776 112 4.845 23 0.911 68 2.82 113 4.893 24 0.951 69 2.864 114 4.941 25 0.992 70 2.909 115 4.988 26 1.033 71 2.953 116 5.036 27 1.074 72 2.998 117 5.084 28 1.114 73 3.043 118 5.132 29 1.155 74 3.087 119 5.18 30 1.196 75 3.132 120 5.228 31 1.238 76 3.177 121 5.277 32 1.279 77 3.222 122 5.325 33 1.32 78 3.267 123 5.373 34 1.362 79 3.312 124 5.422 35 1.403 80 3.358 125 5.47 36 1.445 81 3.403 126 5.519 37 1.486 82 3.448 127 5.567 38 1.528 83 3.494 128 5.616 39 1.57 84 3.539 129 5.665 40 1.612 85 3.585 130 5.714 41 1.654 86 3.631 42 1.696 87 3.677 43 1.738 88 3.722 44 1.78 89 3.768
Tabla 4.1 Tabla de valores Temperatura contra voltaje
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
36
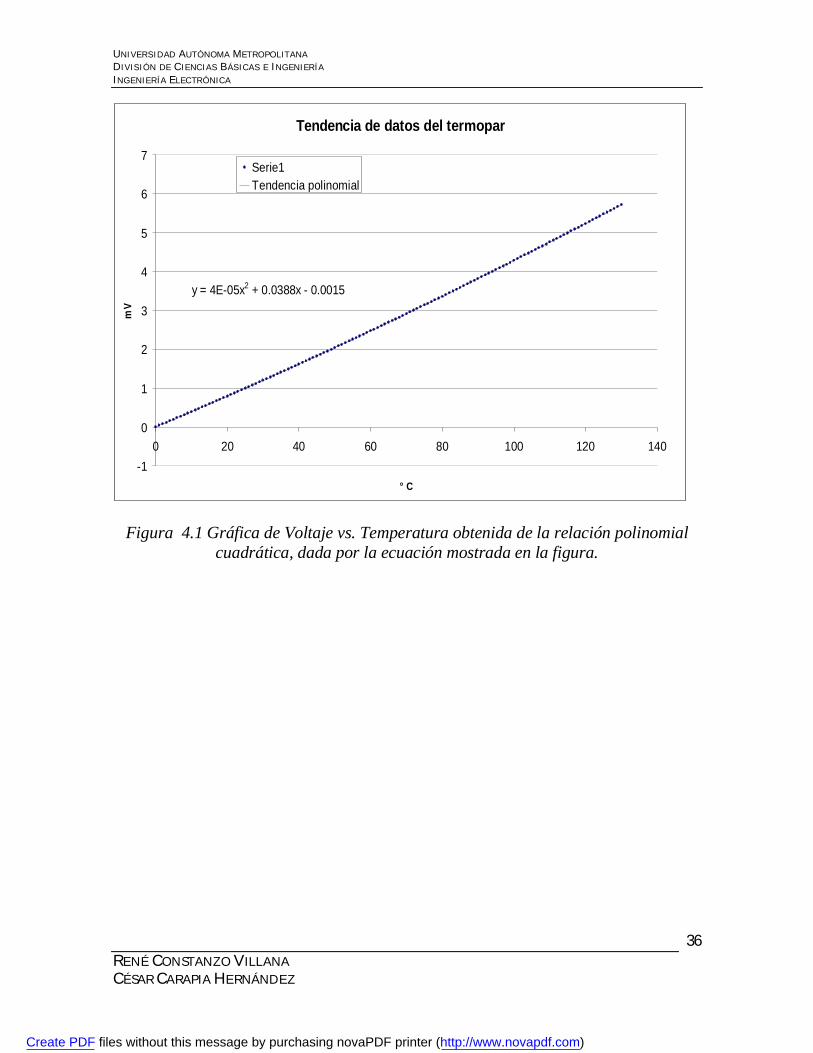
Tendencia de datos del termopar
y = 4E-05x2 + 0.0388x - 0.0015
-1
0
1
2
3
4
5
6
7
0 20 40 60 80 100 120 140
° C
mV
Serie1Tendencia polinomial
Figura 4.1 Gráfica de Voltaje vs. Temperatura obtenida de la relación polinomial cuadrática, dada por la ecuación mostrada en la figura.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
37
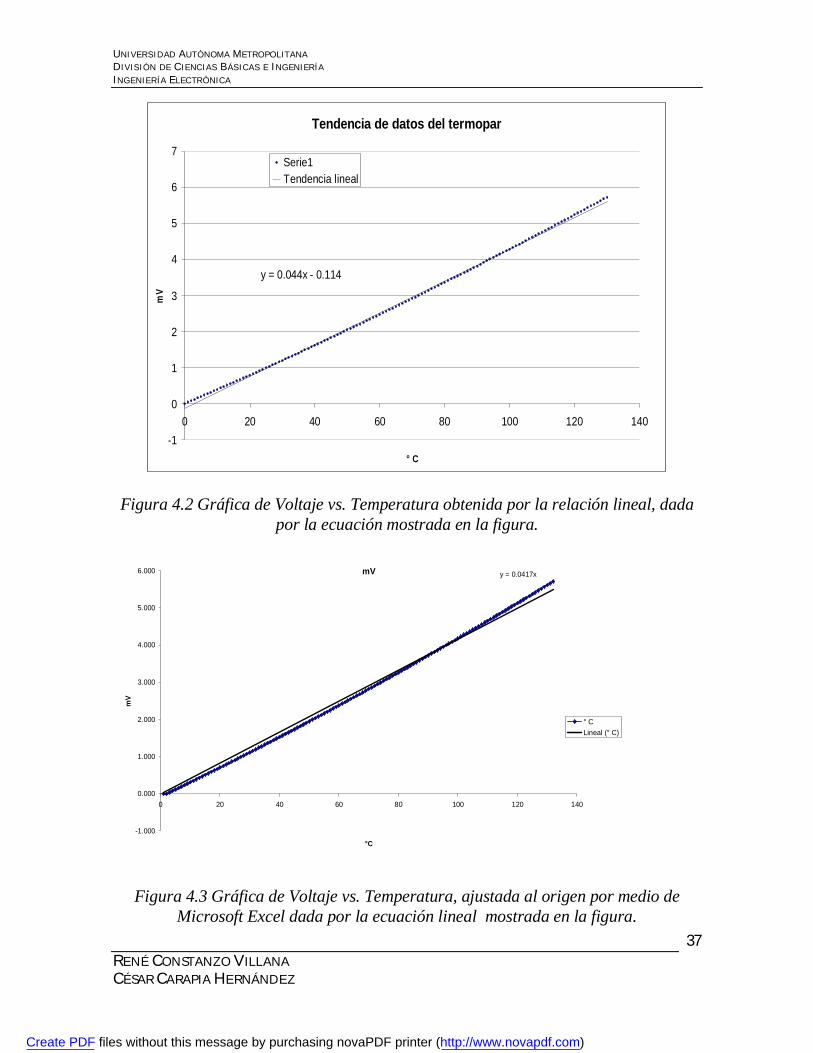
Tendencia de datos del termopar
y = 0.044x - 0.114
-1
0
1
2
3
4
5
6
7
0 20 40 60 80 100 120 140
° C
mV
Serie1Tendencia lineal
Figura 4.2 Gráfica de Voltaje vs. Temperatura obtenida por la relación lineal, dada por la ecuación mostrada en la figura.
mV y = 0.0417x
-1.000
0.000
1.000
2.000
3.000
4.000
5.000
6.000
0 20 40 60 80 100 120 140
°C
mV
° CLineal (° C)
Figura 4.3 Gráfica de Voltaje vs. Temperatura, ajustada al origen por medio de
Microsoft Excel dada por la ecuación lineal mostrada en la figura.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
38
Si bien es cierto que el sensor no tiene un comportamiento lineal, de la grafica para modelarlo como una aproximación lineal puede verse que para valores de temperatura entre los 0°C y los 130°C el voltaje varia de una forma muy similar a una línea recta. Si bien es cierto que existe una desviación con respecto a la recta que modela el comportamiento, esta desviación es mínima y para efectos de la conversión analógica digital a realizarse con el microcontrolador será casi imperceptible. 4.2 SISTEMA DE CONTROL
4.2.1 Elección del microcontrolador.
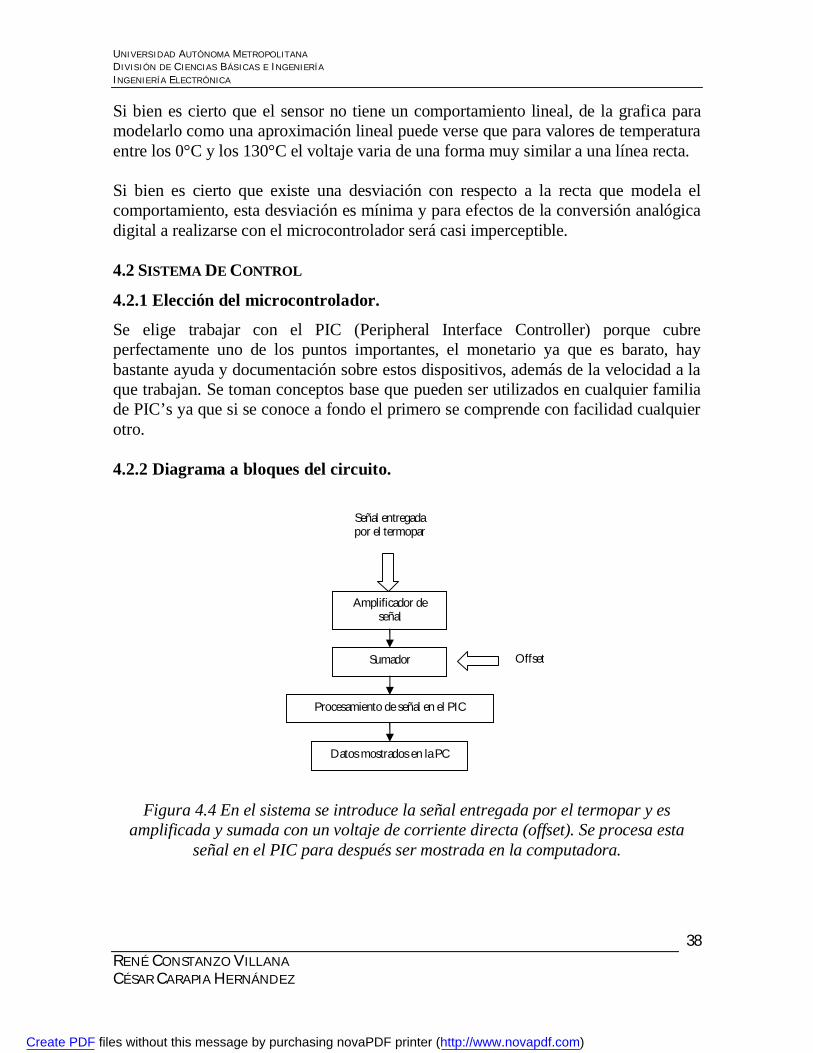
Se elige trabajar con el PIC (Peripheral Interface Controller) porque cubre perfectamente uno de los puntos importantes, el monetario ya que es barato, hay bastante ayuda y documentación sobre estos dispositivos, además de la velocidad a la que trabajan. Se toman conceptos base que pueden ser utilizados en cualquier familia de PIC’s ya que si se conoce a fondo el primero se comprende con facilidad cualquier otro. 4.2.2 Diagrama a bloques del circuito.
Figura 4.4 En el sistema se introduce la señal entregada por el termopar y es
amplificada y sumada con un voltaje de corriente directa (offset). Se procesa esta señal en el PIC para después ser mostrada en la computadora.
Sumador
Procesamiento de señal en el PIC
Datos mostrados en la PC
Amplificador de señal
Señal entregada por el termopar
Offset
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
39
4.2.3 Diagrama a bloques del sistema
Para la implementación de nuestro sistema se han diseñado varios bloques electrónicos, a continuación se describe cada uno de ellos. Listado de bloques. Nuestro sistema básicamente está constituido por 4 bloques los cuales se enlistan a continuación. Etapa de entrada de la señal. Etapa de amplificación de la señal. Etapa de offset y rectificación. Etapa de procesamiento de la información. Etapa de comunicación serial.
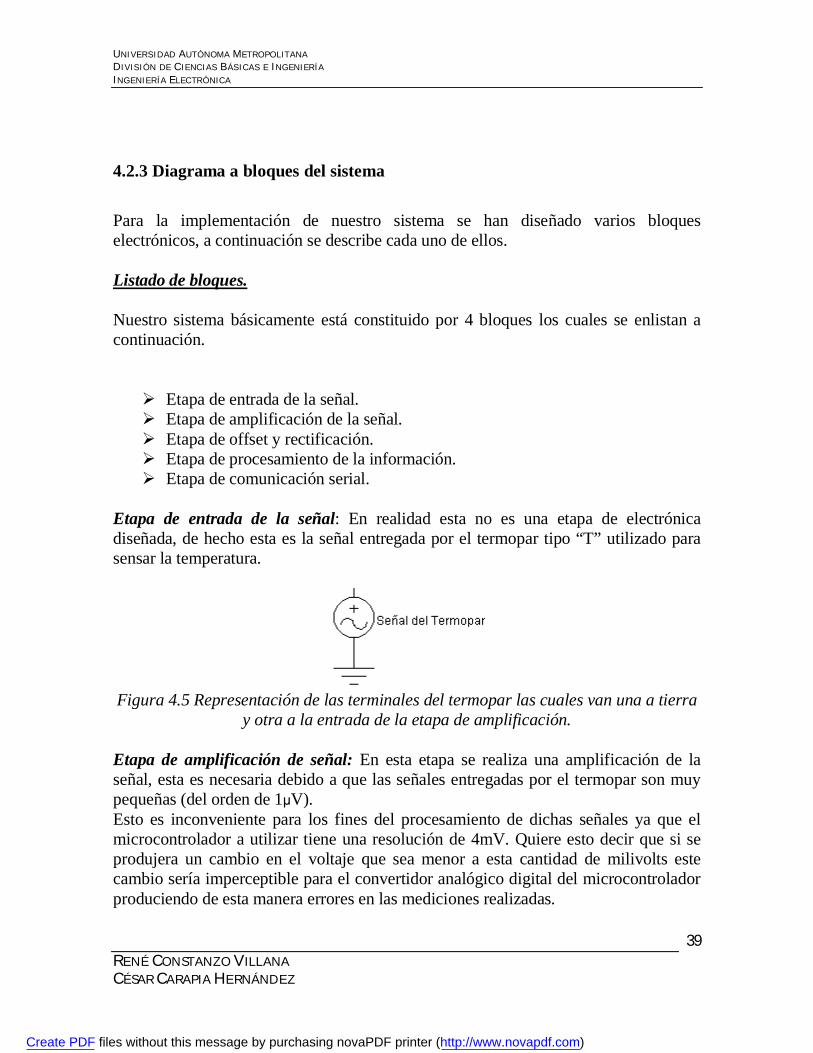
Etapa de entrada de la señal: En realidad esta no es una etapa de electrónica diseñada, de hecho esta es la señal entregada por el termopar tipo “T” utilizado para sensar la temperatura.
Figura 4.5 Representación de las terminales del termopar las cuales van una a tierra
y otra a la entrada de la etapa de amplificación. Etapa de amplificación de señal: En esta etapa se realiza una amplificación de la señal, esta es necesaria debido a que las señales entregadas por el termopar son muy pequeñas (del orden de 1µV). Esto es inconveniente para los fines del procesamiento de dichas señales ya que el microcontrolador a utilizar tiene una resolución de 4mV. Quiere esto decir que si se produjera un cambio en el voltaje que sea menor a esta cantidad de milivolts este cambio sería imperceptible para el convertidor analógico digital del microcontrolador produciendo de esta manera errores en las mediciones realizadas.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
40
Para los fines de tomar mediciones se implementó un circuito con una ganancia de 282 esto es suficiente para poder ver cambios en el voltaje de 10.15mV por cada grado centígrado.
Figura 4.6 Circuito que corresponde a la etapa de amplificación. Elaborado con un
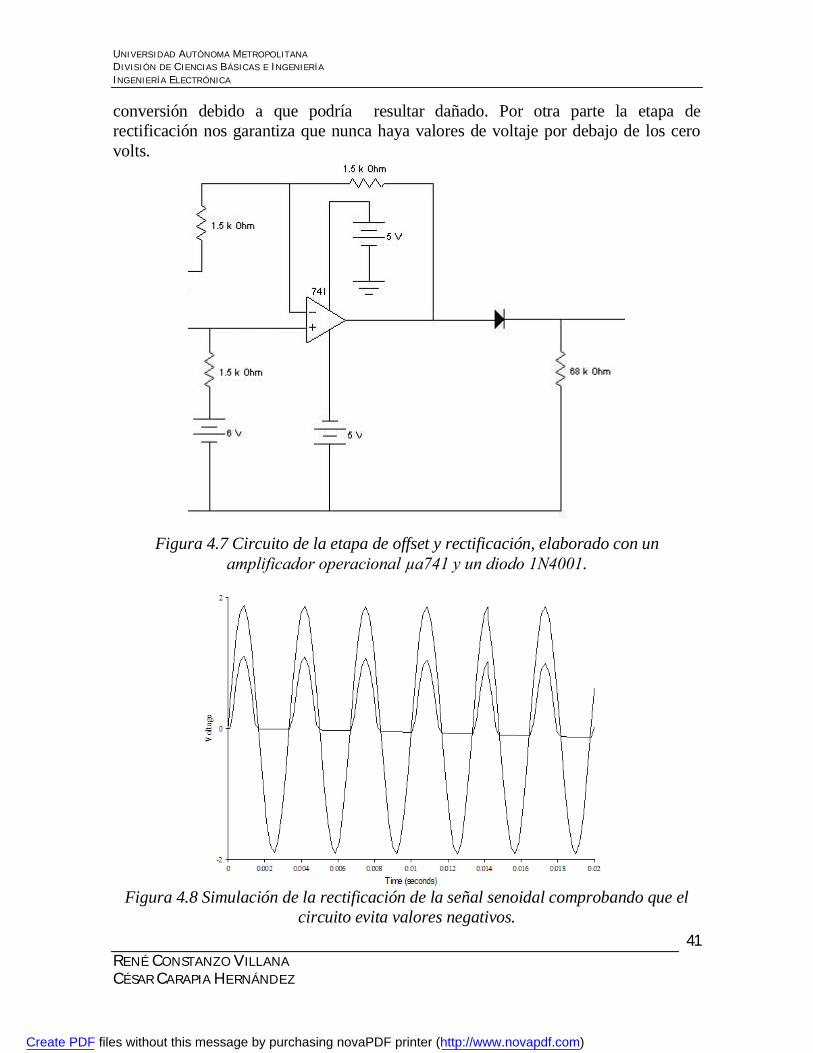
amplificador operacional µa741. Etapa de offset y rectificación: Es importante en la elaboración de este diseño tomar en cuenta otra característica importante del modulo de conversión analógico digital del PIC16F877, nos referimos a la imposibilidad del PIC para realizar conversiones analógico digitales de señales que toman valores negativos, este es el caso de nuestro termopar el cual como puede verse de las tablas mostradas en la sección 4.1.2 toma valores negativos para valores de temperatura por debajo de los 0°C. Por esta causa es necesario introducir este bloque de offset el cual nos evitará tener voltajes negativos a la entrada de la etapa de conversión analógica digital de nuestro microcontrolador, también debemos considerar otra restricción que es de suma importancia, esta se refiere a evitar tener más de 5 volts a la entrada del convertidor analógico digital del PIC ya que este voltaje es precisamente el utilizado para la alimentación del PIC, es por esa causa que no debe rebasarse dicho voltaje en la entrada del módulo de
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
41
conversión debido a que podría resultar dañado. Por otra parte la etapa de rectificación nos garantiza que nunca haya valores de voltaje por debajo de los cero volts.
Figura 4.7 Circuito de la etapa de offset y rectificación, elaborado con un
amplificador operacional µa741 y un diodo 1N4001.
Figura 4.8 Simulación de la rectificación de la señal senoidal comprobando que el
circuito evita valores negativos.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
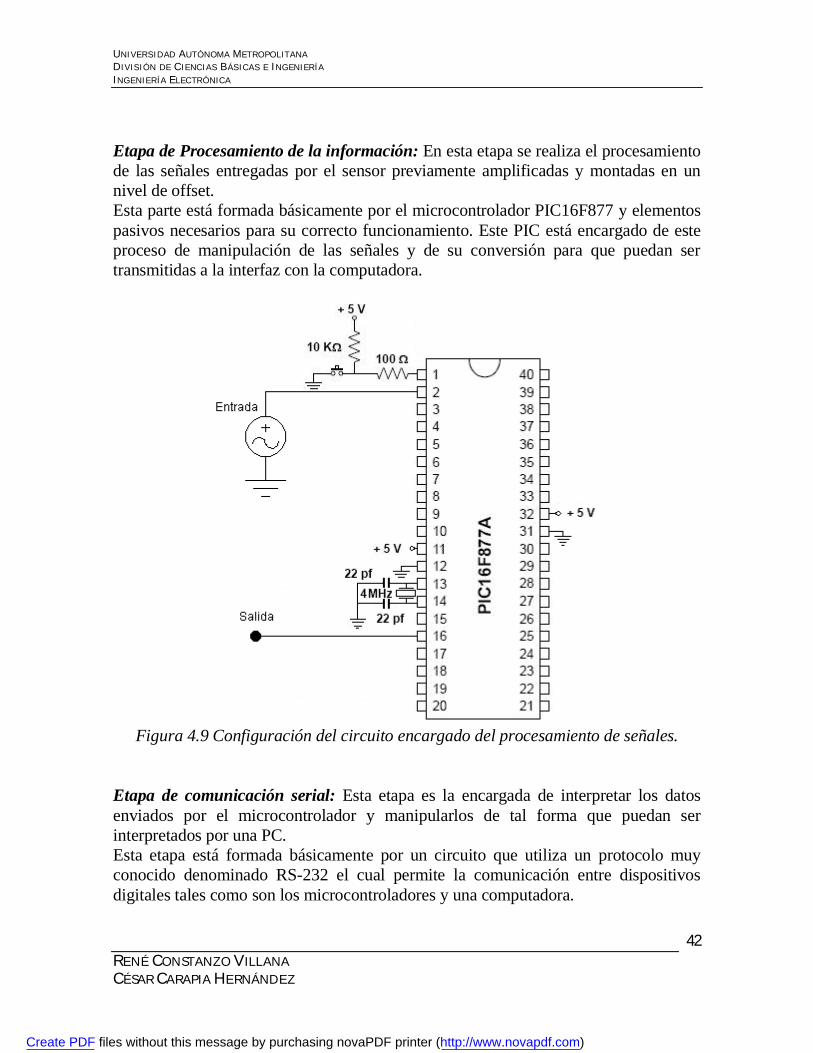
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
42
Etapa de Procesamiento de la información: En esta etapa se realiza el procesamiento de las señales entregadas por el sensor previamente amplificadas y montadas en un nivel de offset. Esta parte está formada básicamente por el microcontrolador PIC16F877 y elementos pasivos necesarios para su correcto funcionamiento. Este PIC está encargado de este proceso de manipulación de las señales y de su conversión para que puedan ser transmitidas a la interfaz con la computadora.
Figura 4.9 Configuración del circuito encargado del procesamiento de señales.
Etapa de comunicación serial: Esta etapa es la encargada de interpretar los datos enviados por el microcontrolador y manipularlos de tal forma que puedan ser interpretados por una PC. Esta etapa está formada básicamente por un circuito que utiliza un protocolo muy conocido denominado RS-232 el cual permite la comunicación entre dispositivos digitales tales como son los microcontroladores y una computadora.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
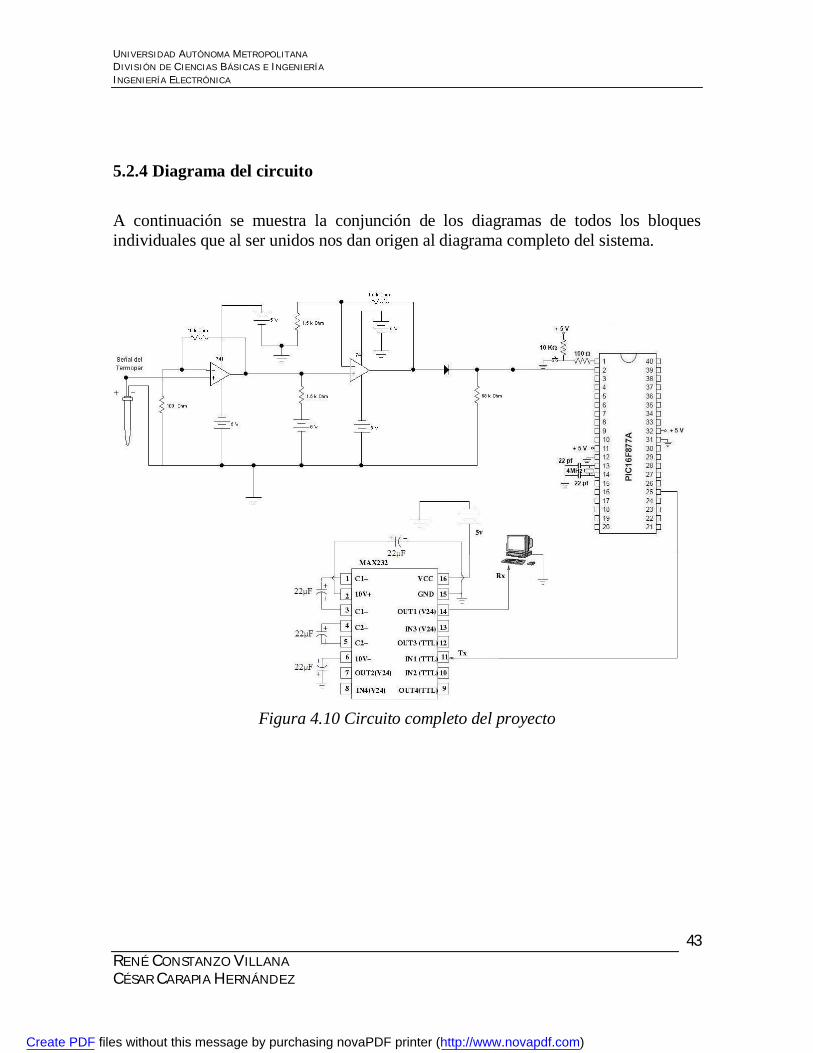
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
43
5.2.4 Diagrama del circuito
A continuación se muestra la conjunción de los diagramas de todos los bloques individuales que al ser unidos nos dan origen al diagrama completo del sistema.
Figura 4.10 Circuito completo del proyecto
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
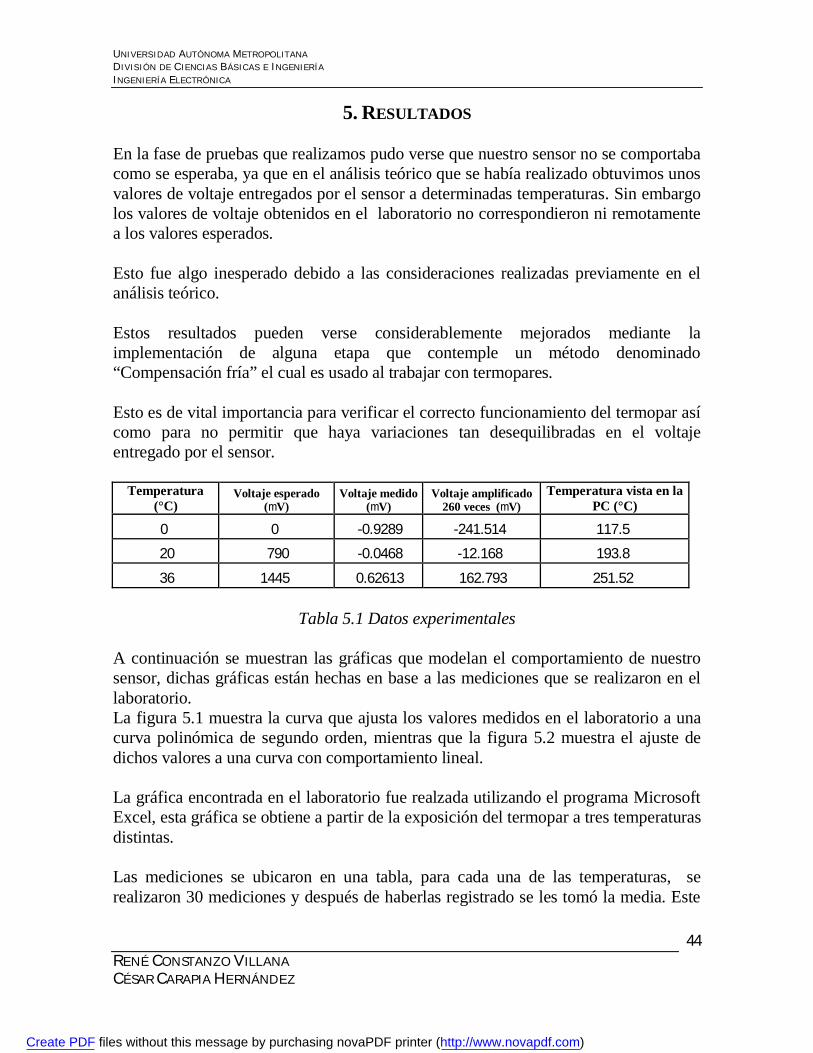
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
44
5. RESULTADOS En la fase de pruebas que realizamos pudo verse que nuestro sensor no se comportaba como se esperaba, ya que en el análisis teórico que se había realizado obtuvimos unos valores de voltaje entregados por el sensor a determinadas temperaturas. Sin embargo los valores de voltaje obtenidos en el laboratorio no correspondieron ni remotamente a los valores esperados. Esto fue algo inesperado debido a las consideraciones realizadas previamente en el análisis teórico. Estos resultados pueden verse considerablemente mejorados mediante la implementación de alguna etapa que contemple un método denominado “Compensación fría” el cual es usado al trabajar con termopares. Esto es de vital importancia para verificar el correcto funcionamiento del termopar así como para no permitir que haya variaciones tan desequilibradas en el voltaje entregado por el sensor.
Temperatura (°C)
Voltaje esperado (mV)
Voltaje medido (mV)
Voltaje amplificado 260 veces (mV)
Temperatura vista en la PC (°C)
0 0 -0.9289 -241.514 117.5
20 790 -0.0468 -12.168 193.8
36 1445 0.62613 162.793 251.52
Tabla 5.1 Datos experimentales
A continuación se muestran las gráficas que modelan el comportamiento de nuestro sensor, dichas gráficas están hechas en base a las mediciones que se realizaron en el laboratorio. La figura 5.1 muestra la curva que ajusta los valores medidos en el laboratorio a una curva polinómica de segundo orden, mientras que la figura 5.2 muestra el ajuste de dichos valores a una curva con comportamiento lineal. La gráfica encontrada en el laboratorio fue realzada utilizando el programa Microsoft Excel, esta gráfica se obtiene a partir de la exposición del termopar a tres temperaturas distintas. Las mediciones se ubicaron en una tabla, para cada una de las temperaturas, se realizaron 30 mediciones y después de haberlas registrado se les tomó la media. Este
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
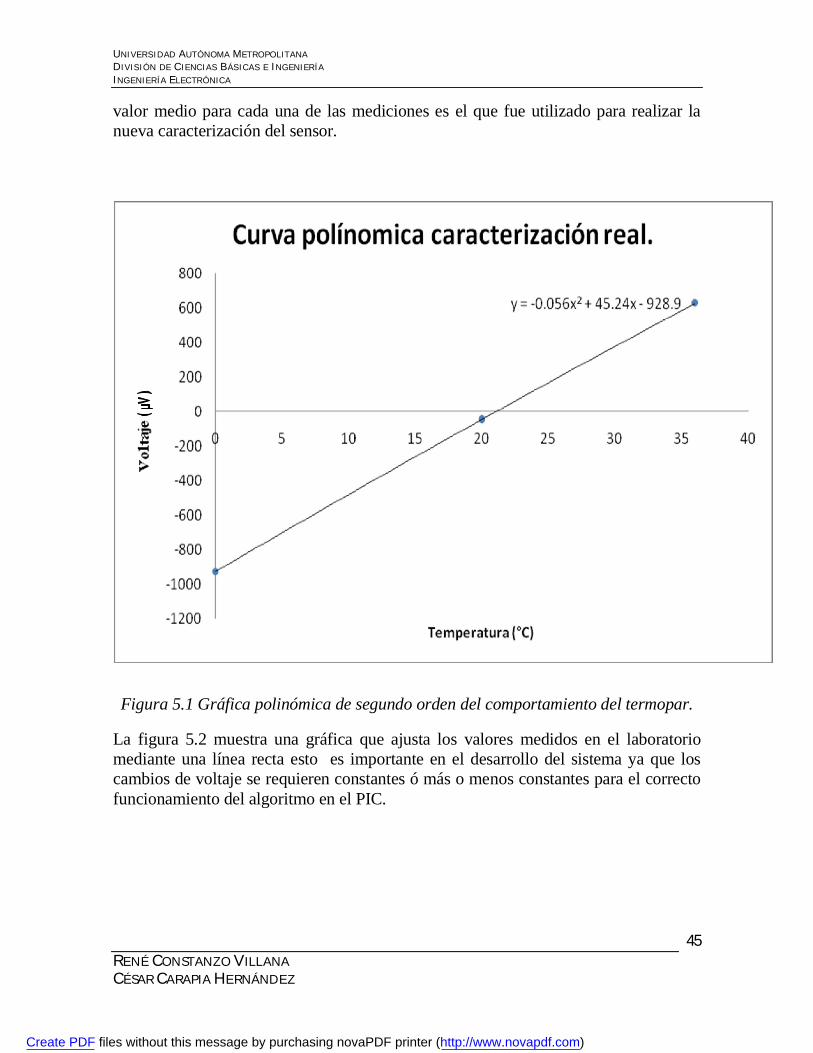
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
45
valor medio para cada una de las mediciones es el que fue utilizado para realizar la nueva caracterización del sensor.
Figura 5.1 Gráfica polinómica de segundo orden del comportamiento del termopar.
La figura 5.2 muestra una gráfica que ajusta los valores medidos en el laboratorio mediante una línea recta esto es importante en el desarrollo del sistema ya que los cambios de voltaje se requieren constantes ó más o menos constantes para el correcto funcionamiento del algoritmo en el PIC.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
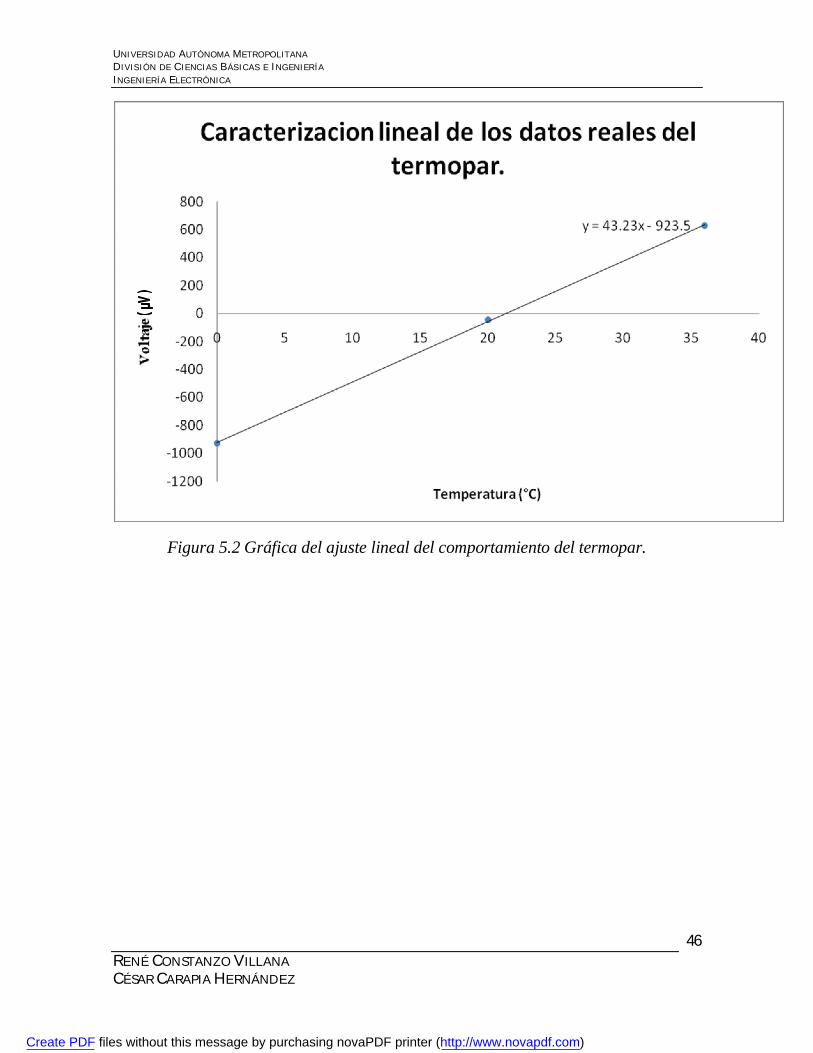
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
46
Figura 5.2 Gráfica del ajuste lineal del comportamiento del termopar.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
47
6 CONCLUSIONES
Se realizaron las adecuaciones de la señal por medio de amplificadores operacionales para obtener los valores aceptados de voltaje por el controlador. Al inicio se había realizado una amplificación solo de 46 veces de la señal de entrada sin embargo puede verse de las tablas que por cada cambio de 1 °C en la temperatura se tiene un cambio aproximado de 39 µV después de haber hecho los cálculos pertinentes pudimos ver que necesitábamos obtener una amplificación mínimo de 103 sin embargo nosotros decidimos dar una ganancia de 260 a nuestra etapa de amplificación. De esta forma se garantizó que por cada cambio de un grado en la temperatura medida se produzca un cambio de 10.14mV en la señal de voltaje que entrega el termopar. Además se realizó la implementación de un sumador de señales para evitar introducir los voltajes negativos entregados por el termopar, la inclusión de esta etapa fue crucial debido al inesperado funcionamiento del sensor. De esta forma se montó la señal entregada por la etapa de amplificación en un nivel de corriente directa evitando así que la señal entregada a la siguiente etapa (Procesamiento de la seña mediante el convertidor analógico digital del PIC) tuviera valores negativos. Aún después de haber montado la señal en este nivel de offset se agregó una etapa de rectificación de la señal la cual anuló totalmente la posibilidad de tener voltajes negativos de la señal de entrada conectado al convertidor analógico digital del PIC. De esta forma fue posible evitar que hubiera valores de voltaje negativos sin embargo hacía falta garantizar que no hubiera voltajes por arriba de 5 volts a la entrada del PIC. Esto fue implementado de una manera más simple de hecho en esta etapa solamente fue necesario considerar que los voltajes entregados por la etapa de amplificación no deberían rebasar los 5 volts y esto puede garantizarse simplemente polarizando los operacionales con 5volts y -5volts, de esta forma no se tuvieron valores de la señal por arriba de los 5 volts. Esta etapa se implementó debido a que es importantísimo garantizar que el convertidor analógico digital de nuestro PIC no reciba voltajes negativos ni voltajes por arriba de 5 volts. Para la etapa correspondiente a la adecuación de la señal valdría la pena mencionar que es necesario realizar alguna modificación al programa que realiza la conversión analógica digital en el PIC, ya que los voltajes mostrados por la computadora no son coherentes en el sentido estricto de la palabra ya que se ven valores de temperatura
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
48
fuera de lo que se esperaba, sin embargo esto es una consecuencia lógica que proviene del hecho de que se haya agregado un offset a la señal que entra al convertidor analógico digital ya que el programa que se utilizó fue el mismo que se había usado antes para medir temperatura con un sensor de temperatura común del cual se conocía bastante bien su funcionamiento, nos referimos al LM35DZ este sensor entrega una señal que tiene un incremento de 10mV por cada °C de incremento en la temperatura a la que es expuesto. De esta forma queda mucho más claro que el algoritmo implementado en el microcontrolador está pensado para operar las señales entregadas por este sensor. No obstante que se planificó la implementación del hardware de adecuación de señal para utilizar este mismo algoritmo para la señal entregada por el termopar cabe resaltar que esto no fue posible debido al inesperado funcionamiento del termopar. Por motivos de tiempo ya no fue posible realizar una correcta caracterización del termopar para hacer modificaciones al hardware ó al algoritmo que gobierna el funcionamiento del convertidor analógico del PIC, con el objetivo de conseguir mediciones correctas en la computadora. Esta imposibilidad para caracterizar nuevamente al termopar surge de la falta de instrumentación con la cual pudieran realizarse mediciones precisas y correctas (termómetros y calentadores). Además de la cuestión del tiempo ya que este fue insuficiente para seguir realizando pruebas. Al conectar el termopar al circuito el voltaje entregado por el termopar varía con respecto al medido antes de ser conectado, esto tiene una repercusión importante en el valor de la señal entregada al convertidor analógico digital del PIC. De la realización de este proyecto pudo comprobarse que el mejor sensor para medir temperatura en fluidos en condiciones de temperatura extremas es el termopar sin embargo la información de los fabricantes y el comportamiento del dispositivo no concuerdan con la manera en que funciona el sensor. Esto pudiera ser causado por diferentes factores, quizá el motivo pudiera haber sido que el termopar este mal calibrado, en dado caso deberá mandarse a calibrar el instrumento y después proceder al modelado, sin embargo también se debe considerar la implementación de un método denominado compensación de unión fría de esta forma sería más factible considerar que el termopar se comporta de la manera esperada de acuerdo a las tablas de comportamiento que se tienen. Las mediciones realizadas en el laboratorio para el modelado real de nuestro sensor se utilizaron solamente 3 temperaturas distintas.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
49
La primera temperatura (Temperatura ambiente) se consideró igual al valor dado por el servicio meteorológico nacional. La segunda temperatura (Temperatura corporal) se midió mediante la utilización de un termómetro de mercurio. La tercer temperatura (Temperatura del hielo) se consideró como 0°C. Vale la pena mencionar que estas temperaturas son aproximadas y que en realidad debería de haberse hecho una medición que tuviera mucho mayor exactitud para garantizar que estos valores de temperatura fueran mucho más precisos.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
50
7 BIBLIOGRAFÍA Aplicaciones de Microprocesadores e Interfaces Documento del Profesor Juan Ramón Jiménez Alaniz (U.A.M. Iztapalapa) Curso de PICs Impartido por el Profesor Mauricio López Villaseñor (U.A.M Iztapalapa) Implementación de un sistema de desarrollo utilizando los microcontroladores PIC Microchip Technology Documento del Manuel Fernando Campos Cerda, Ramiro Castañeda Pérez, Arturo César Contreras Torres Guías de fermentación Universidad Nacional de Colombia Circuitos Micro electrónicos Del S. Sedra, Kenneth C. Smith
A continuación se citan algunas páginas de internet que fueron utilizadas como
referencias para la investigación realizada.
http://es.wikipedia.org/wiki/Termopar
http://www.unicrom.com/Tut_PICs1.asp
http://www.ucontrol.com.ar/wiki/index.php?title=El_microcontrolador
http://es.wikipedia.org/wiki/Fermentaci%C3%B3n
http://es.wikipedia.org/wiki/Fermentaci%C3%B3n
http://www.tempeh.info/es/fermentacion-alcoholica.php
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
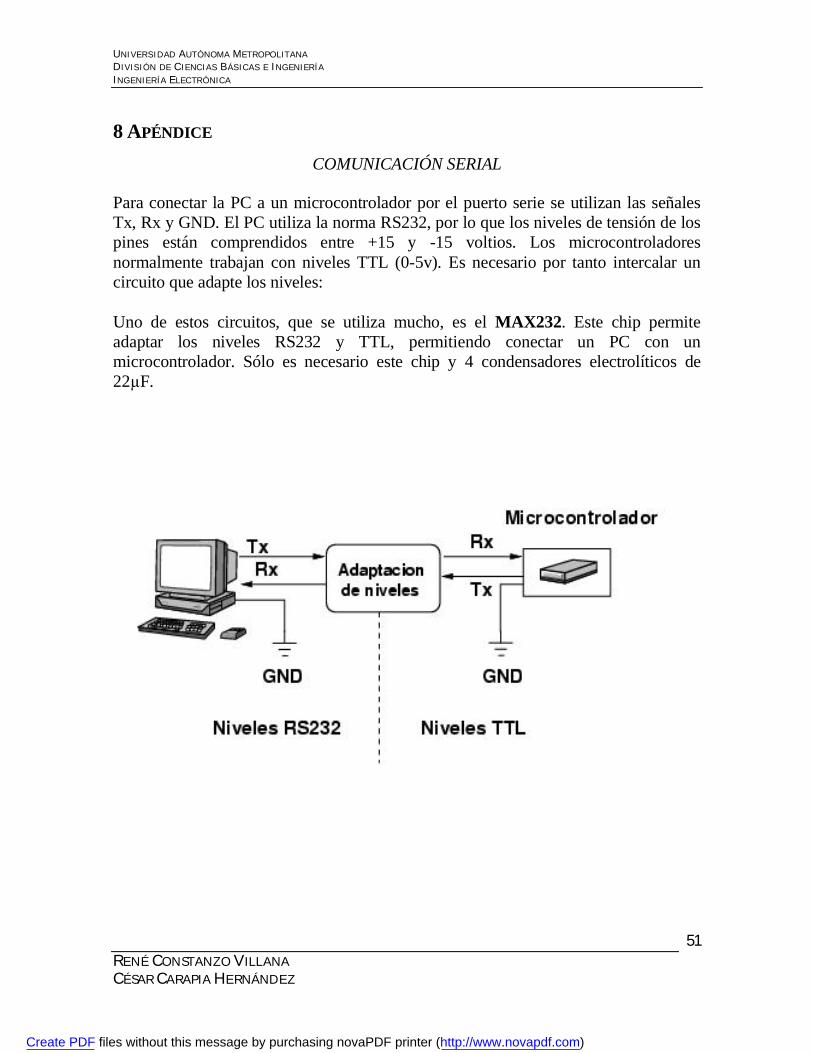
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
51
8 APÉNDICE COMUNICACIÓN SERIAL
Para conectar la PC a un microcontrolador por el puerto serie se utilizan las señales Tx, Rx y GND. El PC utiliza la norma RS232, por lo que los niveles de tensión de los pines están comprendidos entre +15 y -15 voltios. Los microcontroladores normalmente trabajan con niveles TTL (0-5v). Es necesario por tanto intercalar un circuito que adapte los niveles: Uno de estos circuitos, que se utiliza mucho, es el MAX232. Este chip permite adaptar los niveles RS232 y TTL, permitiendo conectar un PC con un microcontrolador. Sólo es necesario este chip y 4 condensadores electrolíticos de 22µF.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
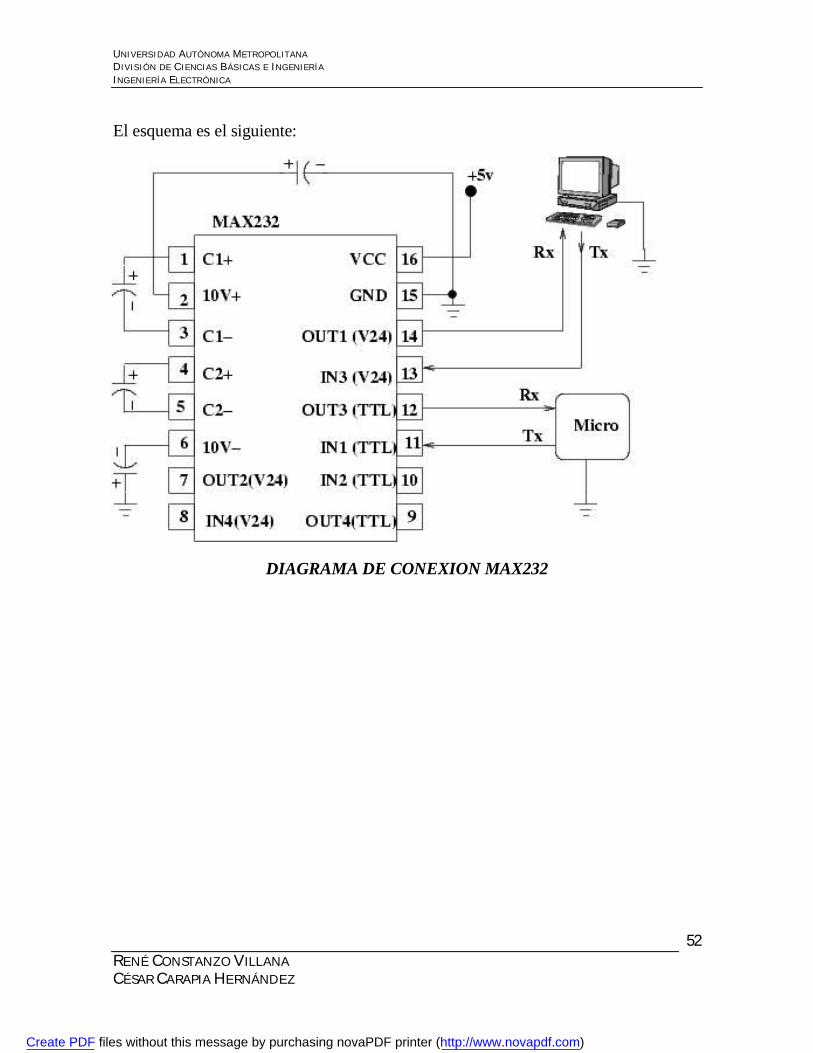
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
52
El esquema es el siguiente:
DIAGRAMA DE CONEXION MAX232
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
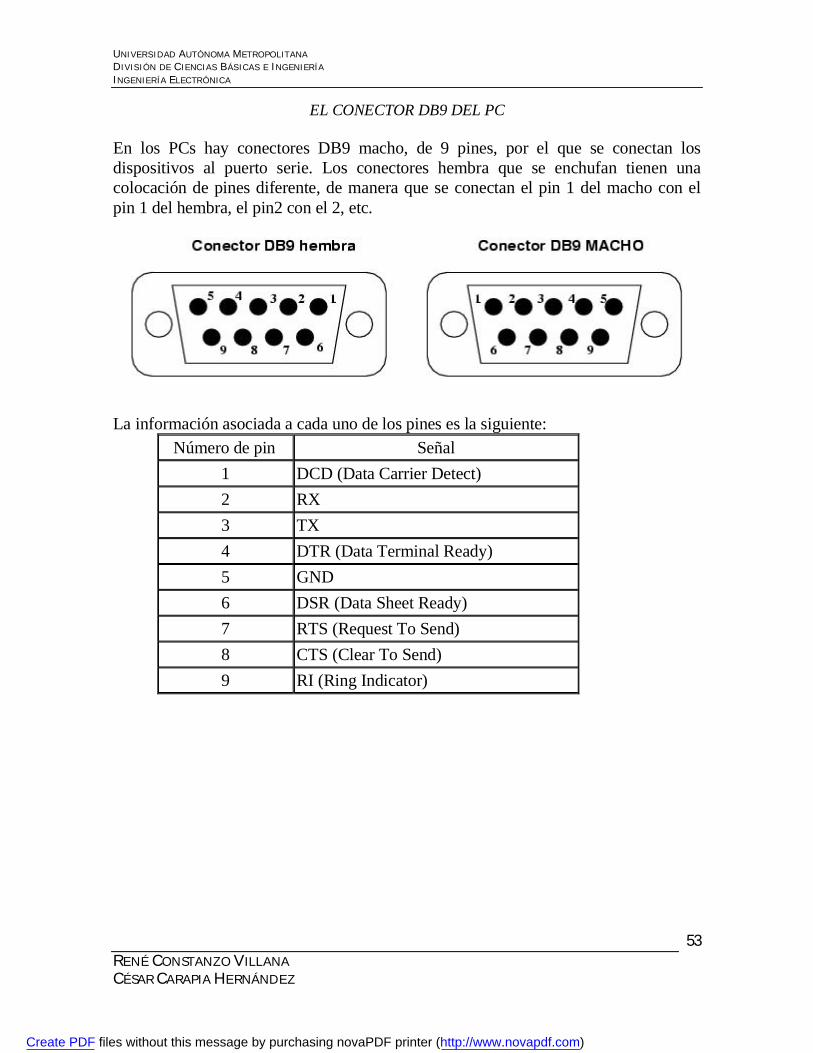
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
53
EL CONECTOR DB9 DEL PC
En los PCs hay conectores DB9 macho, de 9 pines, por el que se conectan los dispositivos al puerto serie. Los conectores hembra que se enchufan tienen una colocación de pines diferente, de manera que se conectan el pin 1 del macho con el pin 1 del hembra, el pin2 con el 2, etc.
La información asociada a cada uno de los pines es la siguiente: Número de pin Señal
1 DCD (Data Carrier Detect) 2 RX 3 TX 4 DTR (Data Terminal Ready) 5 GND 6 DSR (Data Sheet Ready) 7 RTS (Request To Send) 8 CTS (Clear To Send) 9 RI (Ring Indicator)
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
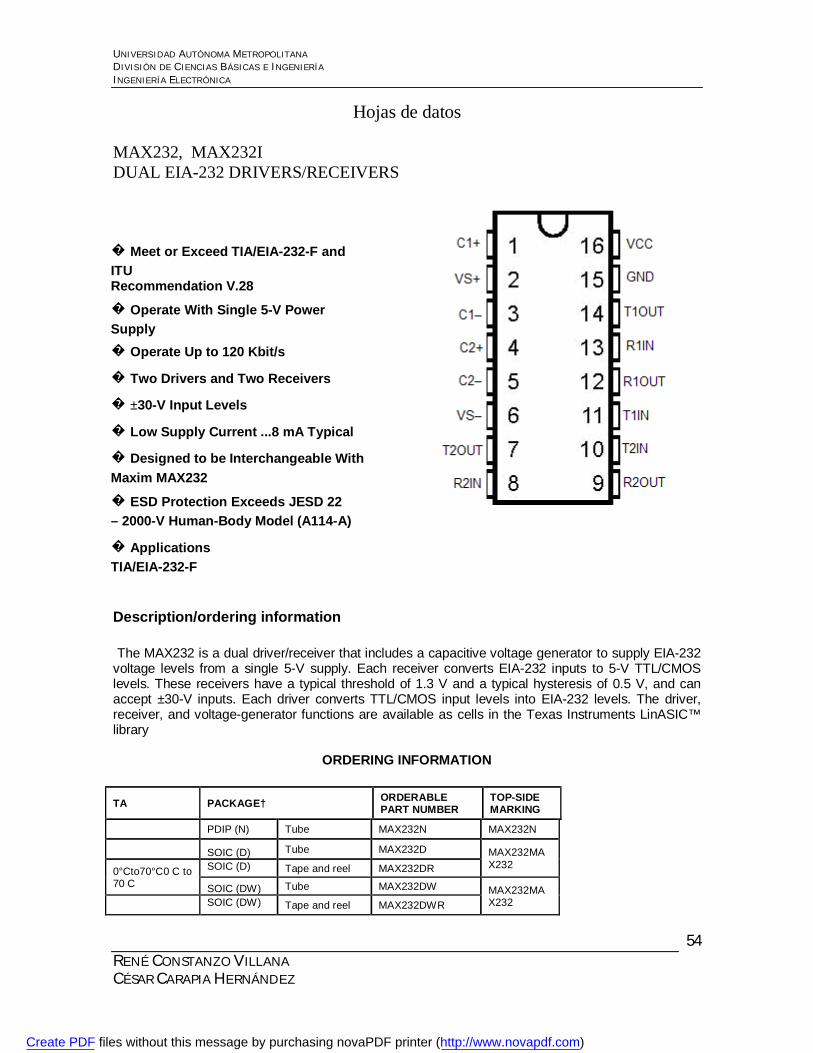
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
54
Hojas de datos MAX232, MAX232I DUAL EIA-232 DRIVERS/RECEIVERS
Description/ordering information The MAX232 is a dual driver/receiver that includes a capacitive voltage generator to supply EIA-232 voltage levels from a single 5-V supply. Each receiver converts EIA-232 inputs to 5-V TTL/CMOS levels. These receivers have a typical threshold of 1.3 V and a typical hysteresis of 0.5 V, and can accept ±30-V inputs. Each driver converts TTL/CMOS input levels into EIA-232 levels. The driver, receiver, and voltage-generator functions are available as cells in the Texas Instruments LinASIC™ library
ORDERING INFORMATION TA PACKAGE† ORDERABLE
PART NUMBER TOP-SIDE MARKING
PDIP (N) Tube MAX232N MAX232N
SOIC (D) Tube MAX232D MAX232MAX232 0°Cto70°C0 C to
70 C SOIC (D) Tape and reel MAX232DR
SOIC (DW) Tube MAX232DW MAX232MAX232 SOIC (DW) Tape and reel MAX232DWR
� Meet or Exceed TIA/EIA-232-F and ITU Recommendation V.28
� Operate With Single 5-V Power Supply � Operate Up to 120 Kbit/s
� Two Drivers and Two Receivers
� ±30-V Input Levels
� Low Supply Current ...8 mA Typical
� Designed to be Interchangeable With Maxim MAX232
� ESD Protection Exceeds JESD 22 – 2000-V Human-Body Model (A114-A)
� Applications TIA/EIA-232-F Battery-Powered Systems
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
55
SOP (NS) Tape and reel MAX232NSR MAX232
PDIP (N) Tube MAX232IN MAX232IN
SOIC (D) Tube MAX232ID MAX232IMAX232I –40°C to 85°C SOIC (D) Tape and reel MAX232IDR
SOIC (DW) SOIC (DW) Tube MAX232IDW MAX232IMA
X232I
Absolute maximum ratings over operating free-air temperature range (unless otherwise noted)
Input supply voltage range, VCC (see Note 1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . –0.3 V to 6 V Positive output supply voltage range, VS+. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . VCC– 0.3 V to 15 V Negative output supply voltage range, VS– . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . –0.3 V to –15 V Input voltage range, VI: Driver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . –0.3 V to VCC+ 0.3 V Receiver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ±30 V Output voltage range, VO: T1OUT, T2OUT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . VS–– 0.3 V to VS++ 0.3 V R1OUT, R2OUT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . –0.3 V to VCC + 0.3 V Short-circuit duration: T1OUT, T2OUT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Unlimited Package thermal impedance, θJA (see Note 2):D package . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73°C/W DW package . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57°C/W N package . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67°C/W NS package . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . 64°C/W Lead temperature 1,6 mm (1/16 inch) from case for 10 seconds . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 260°C Storage temperature range, Tstg . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . –65°C to 150°C
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
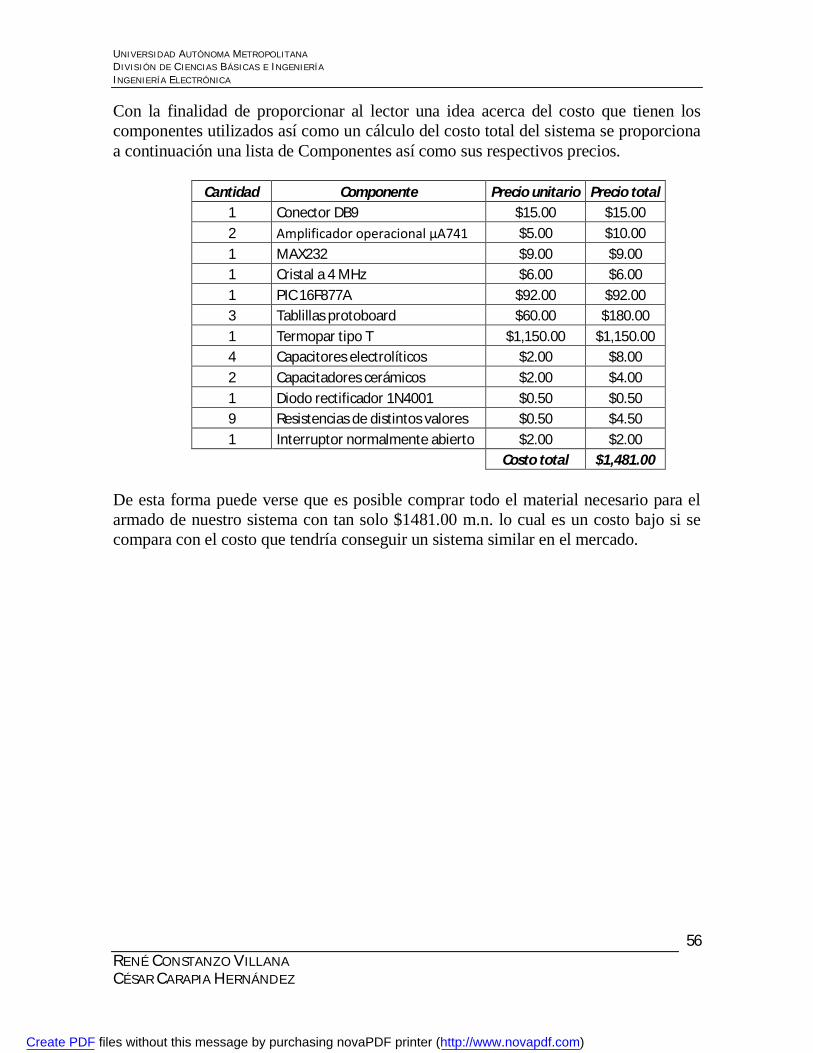
UNIVERSIDAD AUTÓNOMA METROPOLITANA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA INGENIERÍA ELECTRÓNICA
RENÉ CONSTANZO VILLANA CÉSAR CARAPIA HERNÁNDEZ
56
Con la finalidad de proporcionar al lector una idea acerca del costo que tienen los componentes utilizados así como un cálculo del costo total del sistema se proporciona a continuación una lista de Componentes así como sus respectivos precios.
Cantidad Componente Precio unitario Precio total
1 Conector DB9 $15.00 $15.00
2 Amplificador operacional µA741 $5.00 $10.00
1 MAX232 $9.00 $9.00
1 Cristal a 4 MHz $6.00 $6.00
1 PIC 16F877A $92.00 $92.00
3 Tablillas protoboard $60.00 $180.00
1 Termopar tipo T $1,150.00 $1,150.00
4 Capacitores electrolíticos $2.00 $8.00
2 Capacitadores cerámicos $2.00 $4.00
1 Diodo rectificador 1N4001 $0.50 $0.50
9 Resistencias de distintos valores $0.50 $4.50
1 Interruptor normalmente abierto $2.00 $2.00
Costo total $1,481.00
De esta forma puede verse que es posible comprar todo el material necesario para el armado de nuestro sistema con tan solo $1481.00 m.n. lo cual es un costo bajo si se compara con el costo que tendría conseguir un sistema similar en el mercado.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)





























