-
8/10/2019 [doi 10.1109_icelmach.2012.6349866] Prieto, D.;
Daguse, B.; Dessante, P.; Vidal, P.; Vannier, J.-C. -- [IEEE 2012
X
1/7
Abstract -- This paper presents the design of Synchronous
Reluctance Motors (SynRM) with four flux-barriers. Thestudy is
focused on the use of ferrite magnets into flux-barriers and its
impact on average torque, torque ripple and
power factor. The analysis uses Finite Element Method (FEM)for
different pole pair numbers in order to choose an
efficientstructure.
Index TermsElectric motors, Permanent magnet motors,Power
factor, Torque ripple, Synchronous reluctancemachines.
I. NOMENCLATURE
dq ii , : stator electromagnetic current magnitudes
dq VV , : stator electromagnetic voltage magnitudes
dq , : stator flux linkage
dq LL , : quadrature and direct axis inductances
p : pole pair number
: current angle
II. INTRODUCTION
ermanent magnet synchronous motors are known for
their electromagnetic performances and their compactsize. Rare
earths like NdFeB are the kind of material
usually used for permanent magnets, but now their cost is
incremented and therefore the machine becomes more
expensive. A usual solution is the replacement of the motor
by a synchronous reluctance motor which is used in
industrial applications and has a good torque-density [1].
The torque is produced by the saliency of rotor. Several
investigators have compared performances of synchronous
reluctance motors and induction motors [1]-[4]. Common
drawbacks of such motors are the low power factor and the
high torque ripple [5]. In [6] a formula is deduced for
calculating the power factor and its behavior versus the
saliency ratio (Lq/Ld). To improve performances of
synchronous reluctance motor, we must design a rotor with
a large inductance difference (Lq-Ld) and a large saliency
ratio (Lq/Ld) [7].
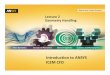
Fig. 1(a) shows a transversally laminated rotor, it is also
called multiple-flux barrier rotor. The interest of that
rotor
Dany Prieto is with the Ecole Suprieure dElectricit, F-91192 Gif
sur
Yvette CEDEX, France (e-mail: [email protected]).
Benjamin Dagus is with the Ecole Suprieure dElectricit,
F-91192
Gif sur Yvette CEDEX, France (e-mail:
[email protected]).
Philippe Dessante is with the Ecole Suprieure dElectricit,
F-91192
Gif sur Yvette CEDEX, France (e-mail:
[email protected]).Pierre Vidal is with the Ecole
Suprieure dElectricit, F-91192 Gif sur
Yvette CEDEX, France (e-mail: [email protected]).
Jean-Claude Vannier is with the Ecole Suprieure dElectricit,
F-
91192 Gif sur Yvette CEDEX, France (e-mail: jean-
[email protected]).
is its high saliency ratio. The barriers limit the d-axis
flux
without obstructing the q-axis flux. We will call this motor
SynRM.
If permanent magnets are inserted into the flux-barriers
of SynRM rotor, Fig. 1(b), the torque-density and power
factor of SynRM can be increased [8]. The magnet flux is
lower than that produced by stator excitation. This
structure
is called Permanent Magnet Assisted Synchronous
Reluctance Motor (PMA-SynRM).
(a) SynRM (b) PMA-SynRM
Fig. 1. Sketch of (a) a synchronous reluctance motor and (b)
permanent
magnet assisted synchronous reluctance motor
This paper proposes the use of ferrite permanentmagnets. This
material is another alternative and the paper
aims to assess the impact of these magnets on the
synchronous reluctance motors. It studies a methodology to
compare the performances (average torque, torque ripple
and power factor) of the SynRM and the PMA-SynRM for
different pole pair number with a same stator imposed for
all structures.
The assumption adopted here, is to use the same
geometry (flux-barriers thickness and opening angles of
flux-barriers) and same volume of magnets for all PMA-
SynRM structures treated in order to keep same price at
therotor.
III. MATHEMATICAL MODEL
The compared structures are a Synchronous Reluctance
Motor (SynRM) and a Permanent Magnet Assisted
Synchronous Reluctance Motor (PMA-SynRM), both with
the same number of flux-barriers per pole, the pole pair
number being a parameter.
A. Axis d-q
The d-q reference frame is shown in Fig. 2. The d-axis is
aligned with the permanent magnet flux of the PMA-SynRM, and the
same convention is used for the SRM.
Effect of Magnets on Average Torque and
PowerFactorofSynchronousReluctanceMotorsD. Prieto, B. Dagus, P.
Dessante, P. Vidal, J.-C. Vannier
P
978-1-4673-0142-8/12/$26.00 2012 IEEE 213
-
8/10/2019 [doi 10.1109_icelmach.2012.6349866] Prieto, D.;
Daguse, B.; Dessante, P.; Vidal, P.; Vannier, J.-C. -- [IEEE 2012
X
2/7
Fig. 2. Sketch of d-q reference frame
B. Mathematical model of SynRM
The Parks equations for a synchronous reluctance
machine are expressed by [6]:
qsdtdd
disrdv
+= (1)
dsdt
qdqisrqv +
+= (2)
In steady-state the currents, idand iq, are constant, so the
derivative of flux, dand q, is zero. The equations (1) and
(2) lead to equation (3).
qIqjXdIdjXIsRV ++= (3)
The equivalent electrical phasor diagram is depicted in
Fig. 3. This diagram shows the low power factor of
synchronous reluctance motors.
Fig. 3. Electrical phasor diagram of SynRM. is the current
angle, is the
torque angle, is the phase angle
Equations (4) and (5) give the SynRM torque. It dependson the
large difference between Ldand Lq.
)(2
3diqqidpT = (4)
( ) ( )
= diqiqLqididLpT 2
3 (5)
C. Mathematical model of PMA-SynRM
By inserting permanent magnets into the flux-barriers of
SynRM rotor, the magnet flux linkage is in the d-axis flux
path. So the flux linkage expressions become:
adidLd += (6)
qiqLq= (7)
Equation (8) gives the torque of a PMA-SynRM. It
increases with the magnet flux linkage.
( ) ( ){ }diqiqLqiadidLpT += 23
(8)
The equivalent electrical phasor diagram is represented
on Fig. 4, where E is the electromotive force produced by
the permanent magnets. It shows the improvement of powerfactor
with the insertion of permanent magnets.
Fig. 4. Electrical phasor diagram of PMA-SynRM, is the current
angle,
is the torque angle, is the phase angle
IV. REQUIREMENTS
Motors characteristics are reported in Table I. The
stator is the same as that of an industrial motor. The
magnets are ferrite type and the amount of magnets is the
same for all designed motors. The pole pair number is the
parameter to be defined in order to have an efficient
structure.
TABLEI
REQUIREMENTS OF SYNCHRONOUS RELUCTANCE MOTOR
Quantity Value
Power [kW] 630
Speed [rpm] 1 500
External diameter [mm] 600
Inner stator diameter [mm] 425
Shaft diameter [mm] 180
Air gap [mm] 1.5
Number of slots 72
V. ANALYSIS
The analysis uses Finite Element Method (FEM).
A. PMA-SynRM Structures
In a first approach, if we increase the number of flux-
barriers, the flux in the d-axis decreases, consequently it
is
possible to get a higher value for the reluctance torque.
But
if we think of increasing the pole pair number, the size of
a
pole becomes smaller, so it generates a geometric
constraint. Fig. 5 shows PMA-SynRM structures. The study
compares four structures with: 2, 3, 4 and 6 pole pair
numbers. For this paper we choose four flux-barriers per
pole for all motors, the structure with p=6 is almostgeometric
limit. All motor structures have the same stator
because it is imposed. All flux-barriers have the same
thickness. The opening angles of flux-barriers are uniform
d-axis
q-axis
I
Iq
Id
jXdId
jXqIq
RsI
V
d-axis
q-axis
I
Iq
Id
jXdId
jXqIq
RsIV
E
214
-
8/10/2019 [doi 10.1109_icelmach.2012.6349866] Prieto, D.;
Daguse, B.; Dessante, P.; Vidal, P.; Vannier, J.-C. -- [IEEE 2012
X
3/7
and the magnets have the same thickness as the barriers,
Fig. 6.
(a) (b)
(c) (d)
Fig. 5. Structure motor (a) 2 pole pairs (b) 3 pole pairs (c) 4
pole pairs (d)
6 pole pairs
Fig. 6. Flux-barriers Geometry
B. Calculation Method
For each structure we set a current angle for the
calculation of average torque, torque ripple and power
factor. Fig. 7 shows the torque behaviors versus rotor
position for an electrical period for a PMA-SynRM four
pole pairs and a current angle =50. The periodicity for the
torque calculation is equal to the sixth part of the
electrical
period, so the average torque and torque ripple will be
calculated on Te/6. It is shown in Fig. 8 and in the
equations
(9) and (10).
Fig. 7. Torque versus rotor position PMA-SynRM, p=4 and =50
Fig. 8. Torque versus rotor position on Te/6 PMA-SynRM, p=4
and
=50
Average torque: )(TmeanaveT = (9)
Torque ripple:
aveT
TTrippleT
)min()max( = (10)
Fig. 9 shows the flowchart on the power factor
computation process. First we compute the flux vector abc
for each phase, then dq is obtained with Parks
transformation. The voltage vector and the torque angle
are computed from dq.
Fig. 9. Power factor computation flowchart
VI. RESULTS
All simulations are carried out with the same current
equivalent to maximal thermal current in one slot. For each
current angle, the average torque, the torque ripple and the
power factor are computed. The gap between SynRM andPMA-SynRM is
expressed with the expression (11).
%100
)(
)()()(
=
SynRMX
SynRMXSynRMPMAXXGap (11)
A. Average torque comparison
Fig. 10 and Fig. 11 show respectively the SynRM and
the PMA-SynRM average torque (Tave) versus current angle
() for each value of pole pairs. Table II gives the values
of
maximum average torque and their optimal current angle
for each pole pair number. It also shows the impact of
magnets on average torque. The increase percentage isbetween 34
and 45%. The best results are for the PMA-
SynRM with 3 and 4 pole pair number. For the PMA-
SynRM withp=4, the maximum average torque is 4257N.m
215
-
8/10/2019 [doi 10.1109_icelmach.2012.6349866] Prieto, D.;
Daguse, B.; Dessante, P.; Vidal, P.; Vannier, J.-C. -- [IEEE 2012
X
4/7
-
8/10/2019 [doi 10.1109_icelmach.2012.6349866] Prieto, D.;
Daguse, B.; Dessante, P.; Vidal, P.; Vannier, J.-C. -- [IEEE 2012
X
5/7
factor is increased around 0.72 and their optimal current
angles are high, above 60.
Fig. 14. Power factor versus current angle, SynRM.
Fig. 15. Power factor versus current angle, PMA-SynRM.
TABLEIV
IMPACT OF THE NUMBER OF POLE PAIRS
Structure Quantity 2 3 4 6
SynRMcos 0.476 0.549 0.514 0.398
() 74 68 62 58
PMA-SynRMcos 0.715 0.766 0.727 0.621
() 76 70 66 60
Gap (%) 50 40 41 56
D. Demagnetization of magnets
Permanent magnets keep their performance when the
magnetic field does not exceed their intrinsic coercivity
field. For the magnet ferrite, the intrinsic coercivity
field
increases when the temperature decreases, to -20C its
value is 375 kA/m. The magnetic field in all magnets wasmeasured
for each PMA-SynRM structure. Fig. 16 shows
the evolution of the field in the permanent magnets for each
value of pole pairs.
Fig. 16. Magnet magnetic field versus current angle,
PMA-SynRM
The magnetic field in the magnets decreases when the
pole pairs increases (Fig. 16), because this field depends
on
the magnetomotive force. In addition structures with more
than 3 pole pairs the magnet magnetic field value does not
exceed the limit value of the intrinsic coercivity field
(375kA/m). It gives the interest to increase the pole pair
number.
VII. DISCUSSION
In order to study performances, we construct three
curves for each structure: SynRM (Fig. 17, 19, 21) and
PMA-SynRM (Fig. 18, 20, 22). The figures show
respectively the Average Torque vs. Power Factor, the
Average Torque vs. Torque Ripple and the Power Factor
vs. Torque ripple. Each figure represents also the variation
of these values in function of the pole pair number.
Fig. 17 and Fig. 18 compare the average torque and
power factor. The region of high average torque and power
factor is situated in the upper right corner. The comparison
between these two figures shows the impact of insertion ofthe
ferrite permanent magnets on the average torque and the
power factor. The PMA-SynRM withp=3 andp=4 presents
the best results, taking into account the requirements
(Tave=
4000 N.m) and a power factor greater than 0.7.
Fig. 17. Average Torque versus Power Factor, SynRM.
Fig. 18. Average Torque versus Power Factor, PMA-SynRM.
The Fig. 19 and Fig. 20, compare the average torque and
torque ripple together. We want to maximize average
torque and minimize torque ripple, therefore points must be
closer to the upper left corner. It is clear that SynRM
structures have fewer points in this direction than PMA-
217
-
8/10/2019 [doi 10.1109_icelmach.2012.6349866] Prieto, D.;
Daguse, B.; Dessante, P.; Vidal, P.; Vannier, J.-C. -- [IEEE 2012
X
6/7
SynRM structures. In addition, PMA-SynRM withp=4 has
a low torque ripple for several points. It should be noted
that PMA-SynRM with p=3 has a high average torque but
its torque ripple is high, between 20 and 25%.
Fig. 19. Average Torque versus Torque Ripple, SynRM.
Fig. 20. Average Torque versus Torque Ripple, PMA-SynRM.
The Fig. 21 and Fig. 22 compare the power factor and
torque ripple together. The region of high power factor and
low torque ripple is also situated in the upper right
corner.
PMA-SynRM structures have more points in this region,
thanks to the magnets that improve the power factor. PMA-
SynRM withp=4 has a high power factor and a low torque
ripple, around 8%, for several points. Also we can see that
PMA-SynRM with p=2 and p=3 have several points with
high power factors, but with torque ripple is high.
Fig. 21. Power Factor versus Torque Ripple, SynRM.
Fig. 22. Power Factor versus Torque Ripple, PMA-SynRM.
Based on the structures comparisons above. We have
chosen to illustrate the PMA-SynRM with p= 4, with the
curve of the Fig. 23. This figure plots in 3D the average
torque, versus the torque ripple and the power factor, each
point is plotted for a given current angle. This type of
figurecan be used as a tool to compare the different structures
and
pole number.
Fig. 23. Average torque versus torque ripple and power factor
for the
PMA-SynRM withp=4
VIII. CONCLUSION
This paper has presented a methodology to compare
SynRM and PMA-SynRM structures by using finite
element method. We presented the characteristics of
average torque, torque ripple and power factor depending
on current angle for different pole pair numbers. We find
that the structure with four pole pair number has the best
performances, of course with the assumption of the same
volume of magnets and same production cost.
It should be noted that the study is limited to a fixed
structure especially the stator, we havent changed nor the
flux-barriers thickness, nor the opening angles, which can
improve the performances. For example the PMA-SynRM
withp=6 can be improved by increasing the volume of the
inserted magnets. We must consider that if we change the
geometry of the stator results may vary, suitable for direct
structure with p=2, for example, if the thickness of thestator
yoke is increased, it will less saturated and thus
torque increase.
218
-
8/10/2019 [doi 10.1109_icelmach.2012.6349866] Prieto, D.;
Daguse, B.; Dessante, P.; Vidal, P.; Vannier, J.-C. -- [IEEE 2012
X
7/7
The performance can be improved when we increase the
thickness of flux-barriers and the volume of permanent
magnets, because the flux of magnets increases and also the
torque and power factor, however, it will have a maximum
value because the increase in the size of flux-barriers also
generates a reduction of rotor iron for the passage of flux
and it produces saturation of the rotor.
This comparison methodology can be used as tool infuture
geometrical optimizations of the different structures.
Another aspect that will be incorporated in future research
is the optimization of the total machine cost (production
cost and material cost) versus performance.
IX. REFERENCES
[1] A. Vagati, "The synchronous reluctance solution: a new
alternative
in AC drives," IEEE 20th International Conference on
Industrial
Electronics, Control and Instrumentation, 1994. IECON '94, vol.
1,
pp. 1-13, Sep. 1994.
[2] T.A. Lipo, "Synchronous reluctance machines A viable
alternative
for AC drivers?"Electric Machines and Power Systems, pp.
659-671,April 1991.
[3] A. Fratta, A. Vagati and F. Villata, "On the evolution of
AC
machines for spindle drive applications," IEEE Transactions
on
Industry Application , vol. 28, N5, pp. 1081-1086, Sep. /Oct.
1992.
[4] A. Boglietti, A. Cavagnino, M. Pastorelli and A; Vagati,
"Experimental comparison of induction and synchronous
reluctance
motors performance,"IEEE Industry Applications Conference,
2005.
Fourtieth IAS Annual Meeting. Conference Record of the 2005,
vol.
1, pp. 474-479, Oct. 2005.
[5] A. Fratta, G. P. Troglia, A. Vagati and F. Villata,
"Evolution of
torque ripple in high performance synchronous reluctance
machines,"Records of IEEE Industry Application Society Annual
Meeting,
Toronto, Canada, vol. 1, pp. 163-170, Oct. 1993.
[6] T. Matsuo and T. A. Lippo, "Rotor design optimization of
synchronous reluctance machine," IEEE Transactions on Energy
Conversion , vol. 9, N 2, pp. 359-365, June 1994.
[7] K.-C. Kim, J. S. Ahn, S. H. Won, J.-P. Hong and J. Lee, "A
study on
the optimal design of SynRM for the high torque and power
factor,"
IEEE Transactions on Magnetics, vol. 43, N 6, pp. 2543-2545,
June. 2007.
[8] N. Bianchi, S. Bolognani, D. Bon and M.-C. Dai Pre, "Rotor
flux-
barrier design for torque ripple reduction in synchronous
reluctance
motors," IEEE Industry Applications Conference, 2006. 41st
IAS
Annual Meeting. Conference Record of the 2006, vol. 3, pp.
1193-
1200, Oct. 2006.
X. BIOGRAPHIES
Dany Prieto was born in Lima, Peru, in 1984. He received the
M.S.
degree in Electrical Engineering from the University of Nantes,
France, in
2011.
Since 2011, he has been working toward the Ph.D. degree in
Electrical
Engineering with the Department of Energy and Power Systems
in
Supelec.
Benjamin Dagus was born in La Rochelle, France, in 1984. He
isgraduated from Ecole Polytechnique de lUnivert de Nantes in
Electrical
Engineering, France, 2008 and he received the M.Sc. degree in
Nantes,
France, 2009.
He is currently working toward the Ph.D. degree in
Electrical
Engineering with the Department of Energy and Power Systems
in
Supelec.
Philippe Dessante is Professor of Department of Energy and
PowerSystems in the Ecole Suprieure dElectricit (Supelec) in
France.
Pierre Vidalis Professor of Department of Energy and Power
Systemsin the Ecole Suprieure dElectricit (Supelec) in France.
Jean-Claude Vannier is Professor and head of Department of
Energyand Power Systems in the Ecole Suprieure dElectricit
(Supelec) in
France.
His research interest is with energy conversion systems
(motors,
actuators, generators) and concerns the modeling, the design and
the
optimization of these equipments for specific applications.
219