Embed Size (px)
Citation preview

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
1
ENGINEERING PHYSICS 1A
By Dr. Z. Birech
Department of Physics, University of Nairobi
Introduction
These lecture notes are for 1rst
year Engineering students (Electrical, Civil, Mechanical, Geospacial, and
Environmental & Biosystems) for their first semester Physics course. The notes cover mechanics and properties of
matter. The course is intended to introduce the student to the science behind physical entities that will be covered in
various areas of engineering. Please note that these notes cover only the first half of first semester engineering
physics course. The second half of the course is not covered here. The section of vectors is not also covered here but
the student can get the background on vectors elsewhere.
Course outline
SECTION I: MECHANICS AND PROPERTIES OF MATTER
1. Motion in one and two dimensions Kinematics: Vector & scalar quantities. Resolution and composition of vectors. The inclined plane.
Displacement. Velocity. Acceleration. Equations of linear motion. Motion under gravity. Projectiles.
Newton’s laws of motion. Linear momentum. Principle of conservation of linear momentum. Elastic and
inelastic collision. Impulse. Circular motion: Angular displacement. Angular momentum, The radian
measure. Angular velocity. Period. Frequency. Acceleration. Centripetal force. Vertical and horizontal
circular paths. Static equilibrium. Moments. Couples. Torque. Work. Energy power
2. Rotational dynamics
Rotation of rigid bodies. Equations of motion. Moment of inertia
3. Simple harmonic motion
Definition. Relation to circular motion. Velocity. Acceleration. Period. Frequency. K.e. p.e.
4. Gravitation
Newton’s laws of Gravitation. Kepler’s laws
5. Properties of Matter Hooke’s law .stress. strain. Young Modulus. Coefficient of friction. Pressure, Pascal principle. Archimedes
principle. Coefficient of viscosity. Stoke’s law. Bernoullis’s principle.
SECTION II: SOUND AND VIBRATIONS
6. Introduction to sound
Wave phenomenon, general wave equation, sound waves, velocity of sound wave, interference, beats and
beat frequency, Doppler Effect
SECTION III: THERMAL PHYSICS
7. Heat
Internal energy and temperature, phase changes of pure substance, isothermal and isobaric compressibility
of gases, liquids and solids
8. Heat transfer Conduction, convection and radiation. Kinetic theory of gases, perfect gas equation, intermolecular forces,
specific heats and equipartition of energy
Books of Reference
1. Ohanian Physics II Edition, Norton & Co., NY (1989)
2. Vector Analysis, Schaum Series by Murray, R., McGraw Hill, NY (1980)
3. Theoretical Mechanics, Schaum Series by Murray, R., McGraw Hill, NY (1986)
4. College Physics, 3rd
Ed, by Miller, Harcourt B. Inc. NY (1972)
5. A-Level Physics 5th
Ed. by Nelkon & Parker, Heinemann (K) Ltd (1991)
6. Any book that covers mechanics, heat and sound
I

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
2
MECHANICS AND PROPERTIES OF MATTER
Chapter 1: Motion in One and Two Dimensions
1.1 Linear Motion (motion in a straight line)
The mathematical concept of vectors is very useful for the description of displacement, velocity and
acceleration in one, two or three dimensions. A body can undergo either one of the following types of
motion or a combination of two or more of these motions namely:
i Translational or rectilinear motion i.e. motion in a straight line
ii Rotational or circular motion e.g. a rotating wheel or planets around the sun
iii Vibrational or oscillatory motion e.g. a pendulum clock, atoms or electrons in a metal or solid.
Displacement )(S is a physical quantity that specifies the position of an object relative to the initial point
(origin) or it is the distance moved in a given direction.
Velocity )( is vector that specifies the rate of change of displacement with time. It is defined by
t
S (1)
The average velocity of an object is given by
TakenTime
ntDisplacemeinChange
For example, consider the displacement-time graph of, say, an automobile given below:
If 12 SS is the change occurring in position in time interval 12 tt , then the average velocity is
t
S
tt
SS
12
12 slope of the straight line 21PP . On the other hand, the speed )( between
1t and 2t is defined by
t
S
t
PPceDisCurved
tt
ceDisActual
21
12
tantan
P1
P2
S
t t2
S1
S2
t1

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
3
i.e. speed is the rate of change of distance with time ( and in some cases is equal to the magnitude of the
velocity). The instantaneous velocity i.e. velocity of the object at a given time or point is the time rate of
change of displacement i.e.
Instantaneous Velocitydt
Sd
Acceleration )(a is a vector specifying how fast the velocity of a body changes with time i.e.
ttTimetaken
locityChangeinVea
(3)
The instantaneous acceleration is defined by
dt
da inst
Their Units are: Displacement (m), Speed (ms-1
), Velocity (ms-1
) and Acceleration (ms-2
).
Types of linear motion
(i) Motion with uniform velocity
Velocity-time graphs and displacement-time graphs are valuable ways of depicting motion in a straight
line. The figures below shows the displacement- and velocity-time graphs for a body moving with
uniform velocity ie constant speed in a fixed direction. The slope of fig (a) gives the velocity.
(a) Displacement-time graph (b) Velocity-time graph
For the displacement-time graph, the slope gives the velocity of the object while the area has no physical
significance. In the velocity-time graph, the slope is the acceleration of the object while the area is the
displacement of the object.
(ii) Motion with uniform acceleration (equations of motion)
If the velocity of a uniformly accelerating object increases from a value u to in time t , then from the
definition of acceleration that
t
ua
(4)
we have
tau (5)
For uniform motion, the displacement covered in time t is defined by
S Average velocityTime tu )(2
1 (6)
Using equation 5, equation 6 gives
2
2
1tatuS (7)
Eliminating t in equation 7 by substituting for t in 6 gives
t
v
t
S

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
4
aSu 222 (8)
Equations 5, 7 and 8 are equations of motion for an object moving in a straight line with uniform
acceleration.
Example A body covers a distance of 10m in 4s it rests for 10s and finally covers a distance of 90m in 6s.
Calculate its average speed.
Solution Total distance m10009010
Total time s206104
Average speed 15
20
100 mss
m
Example A student runs 800m due north in 110s followed by 400m due south in 90s. Calculate his
average speed and his average velocity for the whole journey.
Solution (i) Average speed 16
200
1200
90110
400800tan
ms
s
m
Totaltime
ceTotaldis
(ii) Average velocity 12
90110
400800
ms
Totaltime
acementTotalDispl
For velocity, since it is a vector, you have to choose the direction
Example A car moving with a velocity of 54kmhr-1
accelerates uniformly at the rate of 2ms-2
. Calculate
the distance traveled from the place where the acceleration began to that where the velocity reaches
72kmhr-1
and the time taken to cover this distance.
Solution Given )(1554 11 umskmhr )(2072 11 mskmhr 22 msa ,
then
(i) aSu 222 implying S)2(21520 22 mS 75.43
(ii) tau implying t21520 st 5.2
(iii) Motion under gravity (free falling bodies)
A freely falling body is an object moving freely under the influence of gravity only, regardless of its
initial motion. Objects thrown upward or downward and those released from rest are all falling freely
once they are released.
A body released near the earth’s surface will accelerate towards the earth under the influence of gravity. If
air resistance is neglected, then the body will be in free fall and the motion will proceed with uniform
acceleration of 281.9 msga . The value of this downward acceleration )(g is the same for all
bodies released at the same location and is independent of the bodies’ speed, mass, size and shape. The
equations of motion for freely falling bodies are similar to those for linear motion with constant
acceleration a being replaced by g . For upward motion (rising body), g is negative since the body is
decelerating. Thus

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
5
Sgu
tgtuS
tgu
2
2
1
22
2
(9)
Example A ball is thrown vertically upwards with a velocity of 20 ms-1. Neglecting air resistance,
calculate
(i) The maximum height reached
(ii) The time taken to return to the ground
Solution Taking upward direction as positive, 120 msu and
210 msga then
(i) At maximum height, 10 ms thus
mS
SaSu
20
)10(220200222
(ii) On return to ground, S becomes zero, thus from
sec4
5202
10
2
1
22
2
t
ttgtut
atutS
1.2 Motion in Two Dimensions (Projectile Motion) A projectile is any body that is given an initial velocity and then follows a path determined entirely by the
effects of gravitational acceleration and air resistance. The object moves both vertically and horizontally
hence the motion is in two space dimensions. In analyzing this motion, g is assumed constant and effect of
air resistance considered negligible. The path traced by a projectile is known as its trajectory.
The two motions (horizontal and vertical) are independent of each other i.e. the object moves
horizontally with constant speed, and at the same time, it moves vertically in a way a similar object not
undergoing horizontal motion would move. If air resistance is neglected, then a projectile can be
considered as a freely falling object and its equations of motion can be determined from the linear
equations of motion together with the initial conditions i.e. the initial velocity has components cosu
along the horizontal- and sinu along the vertical direction. The horizontal and vertical motions are
analyzed as follows
Components of initial velocity u
y
uy
ux
θ
u
R
cos
sin
x
y
u u
u u

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
6
(i)Vertical motion the vertical component of u is sinu and the acceleration is –g. When the projectile
reaches the ground at B, the vertical distance h traveled is zero. So from
2
2
1gttuh y ….. (1)
we have
g
utgttuo
sin2
2
1sin 2 ….. (2)
which is the total time of flight. Also the maximum height reached can be evaluated as follows; from
equation 1 we have
g
ugttuY
2
sin
2
1sin
222
….. (3)
after substituting half of the value of t from 2.
(ii) Horizontal motion since g acts vertically, it has no component in the horizontal direction. So the
projectile moves in a horizontal direction with a constant velocity cosu which is the horizontal
component of u. so from the relation tus
we have
g
ug
ug
uuR
2sincossin2
sin2cos 22 … ..(4).
The maximum range is obtained when 12sin oro902 .
In this case
g
uR
2
… ..(5).
Also at the maximum height Y of the path, the vertical velocity of the projectile is zero. So applying the
relation atuv yy in a vertical direction, the time t to reach A is given by
g
utgtu
sinsin0 .(6).
This is just half the time to reach B.
Example An object is thrown horizontally with a velocity of 10m/s from the top of a 20m-high building
as shown. Where does the object strike the ground?
Solution: We consider the horizontal and vertical problems separately.
(i) In the vertical case if the downward direction is taken to be positive, then 10 msoy ,
281.9 msg and my 20 . Thus we can find the time taken to reach the ground from
22 81.92
1020
2
1ttavy yoy from which t=2.02s.
10ms-1
20m

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
7
(ii) In the horizontal case, we have found that the object will be in the air for 2.02s. Therefore given that 110 msxox and st 02.2 , then msmstX x 2.2002.210 1 .
1.3 Newton’s Laws of Motion First Law: A body tends to remain at rest or in uniform motion in a straight line (with constant velocity)
unless acted upon by a resultant force. The tendency of a body to continue in its initial state of motion (a
state of rest or a state of uniform velocity) is called inertia. Accordingly, the first law is often called the
law of inertia.
Second Law: If a net force acts on a body, it will cause an acceleration of that body. That acceleration is
in the direction of the net force and it magnitude is proportional to the magnitude of the net force and
inversely proportional to the mass of the body ie m
Fa
so that amF
. From the definition of a
Newton, the law can be written in the form
amakmF
This (vector) equation is a relation between vector quantities F
and a
, and is equivalent to the three
algebraic equations
zz
yy
xx
amF
amF
amF
Third Law: Action and reaction are always equal and opposite ie when one body exerts a force on
another, the second exerts an equal, oppositely directed force on the first. Examples include when pushing
on a car, the car pushes back against your hand, when a weight is supported by a rope, the rope pulls
down on the hand; a book resting on a table pushes down on the table, and the table in turn pushes up
against the book; the earth pulls on the moon holding it in a nearly circular orbit and the moon pulls on
the earth causing tides. The law differs from the first and second in that, whereas the first and second laws
are concerned with the behavior of a single body, the third law involves two separate bodies. The inherent
symmetry of the action-reaction couple precludes identifying one as action and the other as reaction.
1.4 Collisions and Linear Momentum
Linear Momentum is defined as the product of the object’s mass (m) and its velocity v
and is a vector.
Linear momentum P mass velocity mv
The SI unit of linear momentum is kgms-1
(Newton second-Ns) and its dimension is T
LM. From
Newton’s second law )( amF
, if no external force acts on an object, then
0v u P
F ma m Pt t
is a constant. Thus its momentum is
conserved. This is the principle of conservation of linear momentum. It is useful in solving problems
involving collisions between bodies.
The product of the force and the time is called the impulse of the force I ie
Impulse I F t mv mu P change in momentum
The change of linear momentum P of a particle during a time interval t equals the impulse of
the net force that acts on the particle during the interval. The SI unit of impulse is the same as that of momentum ie Newton-second or kilogram-meter-per-second.

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
8
Collision is any strong interaction between bodies that lasts a relatively short time. Examples include
automobile accidents, neutrons hitting atomic nuclei in a nuclear reactor, balls colliding, the impact of a
meteor on the surface of earth, a close encounter of a spacecraft with the planet Saturn etc. In all
collisions, momentum is conserved. The total energy is also conserved. However, kinetic energy might
not be conserved since it might be converted into other forms of energy like sound, heat or work during
plastic deformation. There are two main types of collisions: elastic and inelastic collisions.
If the forces between the colliding bodies are much larger than any external forces, then the external
forces are neglected and the bodies are treated as an isolated system i.e. all external forces are zero.
Elastic collision: both kinetic energy and momentum are conserved.
(a) before collision (b) after collision
From the figure, we have
bbaabbaa vmvmumum
conservation of linear momentum
2222
2
1
2
1
2
1
2
1bbaabbaa vmvmumum conservation of kinetic energy.
Inelastic collision: momentum is conserved but kinetic energy is not conserved. Thus
bbaabbaa vmvmumum
If the colliding bodies stick together, the collision is totally inelastic and hence we have
Vmmumum babbaa
)(
where V
is the common velocity.
Special cases
(i). Elastic collision in a straight line
If the two objects A and B have equal masses m and mass B is stationary ( uB=0) then for elastic collision
we have
BAA mvmvmu conservation of linear momentum
(a) before collision (b) after collision
and 222
2
1
2
1
2
1BAA mvmvmu conservation of kinetic energy, from which we have
ma ua mb
ub ma va mb
vb
A ua B
ub = 0
mA mB A
ua B vb
mA mB

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
9
222
BAA
BAA
vvu
vvu
Solving gives BA vu and 0Av . Thus the two objects simply exchange velocities ie mass A comes to
rest while mass B moves off with the original velocity of A. this is a situation of maximum energy
transfer between two colliding bodies and is mostly applicable in nuclear reactions where neutrons are
stopped by protons.
(ii). Oblique collisions of equal masses If mass A collides obliquely with mass B which is at rest and both objects are of equal masses m, then the
total momentum of any object will be the sum of the respective momentum components in the vertical
and horizontal directions respectively
Thus conservation of linear momentum gives coscos BAA mvmvmu along the x -
direction
sinsin0 BA mvmv along the y
direction
Conservation of kinetic energy gives 222
2
1
2
1
2
1BAA mvmvmu
(iii). Recoil
In a case where part of a composite body suddenly flies apart eg a bullet fired from a gun, the remaining
part (the gun) must undergo momentum in the opposite direction (recoil) in order to conserve the
momentum. If bm and b are the mass and velocity of the bullet while mg is the mass of the gun, then the
gun will recoil with velocity vg given by
ggbb vmvm
or g
g
bbg v
m
vmv is far much less than bv since bm is far much
less than gm .
Example A car traveling at 90kmhr-1
slams into a tree and is stopped in 40ms. If the car has a mass of
800kg, calculate the average force acting on the car during the collision.
Solution 11 2590 mskmhrv 1
From umvmtF , we have
A ua B
mA mB θ
φ
θ A
B
vB = 0

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
10
NFmskgF 51 10525800sec04.0
Example A person of mass 50kg who is jumping from a height of 5m will land on the ground with a
velocity 11051022 msghv for
210 msg . If he does not flex his knees on landing, he
will be brought to rest very quickly, say th10
1 second. The force F acting is then given by
Nt
momentumF 5000
1.0
1050
. This is a force of about 10 times the person’s weight and the large
force has a severe effect on the body. Suppose, however, that the person flexes his knees and is brought to
rest much more slowly on landing, say 1 second. Then the force F now acting is 10 times less than before,
or 500N. Consequently, much less damage is done to the person on landing.
1.5 Circular Motion
Angular velocity
We consider the kind of motion where an object moves around a circular path about some fixed point.
Examples are moon and earth revolving around the sun, the rim of a bicycle wheel, a stone being whirled
on a string etc. In this chapter the system is assumed to move in a circle with a uniform speed around a
fixed point O as the centre.
If the object moves from A to B so that the radius OA moves through an angle θ, its angular velocity, ω,
about O may be defined as the change of the angle per second. Considering time t taken by the object to
move from A to B we have
t
[units: radians per second].
1 radian (1 rad) is the angle subtended the centre of a circle by an arc whose length is equal to the radius
of the circle.
The period for this kind of motion is given by
2T since 2π radians is the angle in one revolution.
If s is the length of arc AB, then s/r = θ, (from
when , s/r = θ) or
s = rθ
taking
tr
t
s gives
s
B
A
O v
v
θ
θ

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
11
rv (Relationship between angular and linear velocity).
Angular acceleration (α)
An object moving in a circle at constant speed experiences a force that pulls it towards the centre of the
circular path. This force is known as centripetal force. If v is the uniform speed in the circle of radius r,
then the acceleration is given by
r
v2
But rv
Therefore
222 )(
rr
r
r
v
Centripetal Forces
Consider the situation below
The figure shows an object of mass m whirled with constant speed v in a vertical circle of centre O by a
string of length r. Let T1 be the tension in the string at point A (the highest point). Then since the weight
mg acts downwards towards O, then the force towards the centre is given by
mgr
mvT
r
mvmgTF
2
1
2
1
Suppose T2 is the tension when the object is at point B, then at this point mg acts vertically downwards
and has no effect on T2. So
r
mvTF
2
2
Finally considering at point C where it is at the lowest point, mg acts in the opposite direction to T3 giving
C
O
T3
T2
T1
mg
A
B
mg
mg

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
12
mgr
mvT
toleading
r
mvmgTF
2
3
2
3
Comparing T1, T2 and T3 from the above equations, it is seen that maximum tension in the string is at
point
C (i.e, T3 is the highest). This implies that T3 must be greater than mg by mv2/r to make the object keep
moving in a circular path.
Banking
Suppose a car is moving round a banked road in a circular path of horizontal radius r.
If the only forces at the wheels A, B are the normal reactions R1 and R2 respectively, then the resultant
force towards the centre of the track (i.e. providing the centripetal acceleration) is (R1 + R2) sin θ where θ
is the angle of inclination of the plane to the horizontal. This force is equal to the centripetal force;
r
mvRR
2
21 sin)(
For vertical equilibrium
mgRR cos)( 21
Dividing the two equations leads to
rg
v 2
tan
Implying that for a given velocity v and radius r, the angle of inclination of the track for no sided slip
must be tan-1
(v2/rg).
This has also been applied on rail tracks.
Angular Momentum
θ
r
mv2
F1
mg
R1
R2
F2

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
13
Consider a single particle of mass m which at one instant of time has a momentum p and is at a distance r
from the origin of coordinates. The angular momentum L of the particle is defined as the vector
of magnitude
sinrpL
Where θ is the angle between the momentum vector p and the position vector r. The direction of the
vector L is along the perpendicular to the plane defined by the vectors p and r. The direction of the vector
L along this perpendicular is specified by the right-hand rule,
i.e
But p = mv, therefore
L = mr x v (units: Kgms-1
)
The angular momentum of a particle moving with constant velocity in the absence of force is constant, i.e.
the magnitude of L = rpsin θ is constant and the direction of L is also constant. This situation describes a
free particle and represents conservation of angular momentum.
Consider a case of conservation of angular momentum, i.e. a case of a particle in a uniform circular
motion, such as a stone whirled along a circle at the end of a string (Fig below)
The vector L is perpendicular to the plane of the circle. In this case, since the position vector is always
perpendicular to the velocity vector, the magnitude of the angular momentum vector is
mrvrpL sin
So the direction of the angular momentum vector is perpendicular to the plane of the circle. As the
particle moves around the circle, L remains constant in magnitude and direction.
1.6 Equilibrium
1st condition for Equilibrium
Much of Physics has to do with objects and systems which are at rest and remain at rest. This portion of
physics is called statics. It is of prime importance since the concepts which it involves permeate most
fields of physical sciences and engineering.
An object is in equilibrium if it is not accelerating ie no net force must act on it. That does not mean that
no forces may be applied to the body. If several forces act simultaneously, equilibrium demands only
that the net force ie the vector sum of the various forces vanish (be equal zero). This is the first
condition of static equilibrium which can quantitatively be written as
i
iF 0 (1)
L
r
x
y
z

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
14
which is equivalent to three component equations
i
iz
i
iy
i
ix
F
F
F
0
0
0
(2)
For example when an object rests on a table, there are two forces acting on it, namely its weight and the
upward reaction force of the table on the object. Without the table, the object can not remain at rest but
would drop under the pull of gravity.
If the body remains at rest, it is said to be in static equilibrium while when it is in steady motion in
straight line, it is said to be in dynamic equilibrium.
Torque and the 2nd
condition of Equilibrium
Torque is a deciding factor in a state of equilibrium. Torque is defined as the product of force and lever
arm or simply the turning effects of a force. If all the lines a long which several forces lie intersect at the
same point, then the forces are said to be concurrent. The second condition for equilibrium involves or the
torque applied to the object. This condition can be stated as: the resultant of all the torques acting on the
object must be to cause no turning effect ie the clockwise torques must balance the counterclockwise
torques
n
n 0
which can quantitatively be written as
dFForceLeverarmtorque
where the lever arm is the length of a perpendicular distance dropped from the pivot to the line of the
force.
Also
sinrFFr
Where r is the magnitude of the lever arm, F is the applied force and θ is the angle of rotation. In the
equation above, τ is given by the right hand rule for the advance of a screw rotated from the direction of r
towards that of F. (Remember the vector cross product!).
Torques can be classified as either clockwise or counterclockwise. By convention, we take
counterclockwise torques as positive and clockwise torques as negative. Moreover, a force whose line
passes through the pivot causes zero torque. This is a reflection of the fact the lever arm for such a force is
zero. We therefore conclude that an object will be in equilibrium if the following conditions are satisfied:
0niF and 0n
Example A long rope is stretched between points A and B. At each end the rope is tied to a spring scale
that measures the force the rope exerts on the supports. Suppose the rope is pulled sideways at its
midpoint with a force of 400N producing a deflection such that the two segments make angles of 5o with
the line AB. What is the reading of the spring scales?
Solution
Since the body is in equilibrium, we have
X-components

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
15
05cos5cos 12 TT (1)
Y-components
0005sin5sin 21 TT (2)
From equation 1, 21 TT
Therefore
12
222
22955sin2
400
04005sin24005sin5sin
TNT
TTT
The tension in the rope and therefore the force registered on the spring scales is 2295N.
A force of 400N applied perpendicular to the line AB caused a tension of nearly 2300N, more than five
times the applied force in magnitude! There is a practical lesson to be learned here.
Frictional Forces Frictional forces play an important role in the application of Newton’s Laws. There are three major
categories of frictional forces:
(i) Viscous frictional forces occur when objects move through gases and liquids. An example is the
frictional force the air exerts on a fast moving car or plane. The air exerts a retarding force on the car as
the car slides through the air.
(ii) Rolling frictional forces arise as, for example tire rolls on pavement. This type of friction occurs
primarily because the tire deforms as the wheel rolls. Sliding of molecules against each other within the
rubber causes energy to be lost.
(iii) Sliding frictional forces are forces that two surfaces in contact exert on each other to oppose the
sliding of one surface over the other. We will be concerned with sliding frictional forces.
Laws of solid friction
Experimental results on solid friction are summarized in the laws of friction, which state:
1 The frictional force between two surfaces opposes their relative motion.
2 The frictional force is independent of the area of contact of the given surfaces when the normal reaction
is constant.
3 The limiting frictional force is proportional to the normal reaction for the case of static friction. The
frictional force is proportional to the normal reaction for the case of kinetic (dynamic) friction, and is
independent of the relative velocity of the surfaces.
Consider the following simple experiment
If a book resting on the table is pushed lightly with a horizontal force F
the book does not move.
Apparently, the table-top also pushes horizontally on the book with an equal and opposite force. The
frictional force f opposes the sliding motion of the book and it is always directed parallel to the sliding
surfaces. If the pushing is increased slowly, then when the pushing force reaches a certain critical value fs,
the book suddenly begins to move. Afterwards to keep the book moving a smaller frictional force fk is
enough. This simple experiment shows that two frictional forces are important: the maximum static
frictional force fs that must be overcome before the object can start moving and the smaller kinetic
frictional force fk that opposes the motion of the sliding object. The major reason for this behavior (cause
of friction) is that the surfaces in contact are far from smooth. Their jagged points penetrate one another
and cause the surfaces to resist sliding. Once sliding has begun, however, the surfaces do not have time to
“settle down” onto each other completely. As a result, less force is required to keep them moving than to
start their motion. The frictional force depends on how forcefully the two surfaces are pushed together.
This situation is described by what is called the normal force FN (where normal means perpendicular).
The normal force is the perpendicular force that the supporting surface exerts on the surface that rests on
it. The situation is shown below.

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
16
1WFN
21 WWFN
sinFWFN
(a) (b) (c)
Experiments show that the frictional forces sf and kf are often directly proportional to the normal force.
In equation form, we have
Nkk
Nss
Ff
Ff
The factors s and k are called the static and kinetic (or dynamic) coefficients of friction, respectively.
They vary widely depending on the nature of the surfaces involved as well as the cleanliness and dryness
of the surfaces.
The coefficient of static friction s can also be found by placing the block A on the surface S and then
gently tilting S until A is on the point of slipping down the plane. The static frictional force F is then
equal to sinmg where is the angle of inclination of the plane to the horizontal; the normal reaction
R is equal to cosmg so that
tan
cos
sin
mg
mg
R
F
and hence s can be found by measuring .
Figure Coefficient of friction by inclined plane
Example: Consider the situation shown
The applied force due to the rope is 40N, and the block has a mass of 5kg. If the block accelerates at
3.0ms-2
, how large a frictional force must be retarding its motion?
Solution A free-body diagram for this situation is as shown below:
W1
FN
θ
FN FN
W2
W1
Fsinθ
F
R F
MgSinθ MgCosθ
Mg
θ
S
40N
37o
f 5kg
P W
P
W
f
40N
24N 37
o

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
17
No motion occurs in the y direction and so we are not concerned with the y forces. We have for the x
direction
Nf
mskgfNamF xnx
17
0.30.532 2
Can you show that the coefficient of friction is 0.68 in this case?
1.7 Work, Energy and Power
WORK: is defined as the product of the magnitude the displacement S of point of application of force
and the component of the force F parallel to the displacement. Mathematically:
cos. SFSFW
where W is the amount of work done by the force of magnitude F during a small displacement of
magnitude S . We can regard the product cosS as the component of the displacement in the
direction of the force F
, or alternatively, regard the product cosF as the component of the force in the
direction of the displacement.
Features of the definition First work requires the action of a force. Without a force, no work is done. Second, the application of a
force is a necessary but not sufficient condition for work. Work is done only if there is displacement of
the point of application of the force, and then only if this displacement has a component along the line of
action of the force. Although work is the product of two vector quantities, it is a scalar. Its SI unit is the
Newton-meter or kgm2s
-2 and is given the name Joule. One joule is the amount of work done by a force of
one Newton acting over a distance of one meter in the direction of the displacement.
Example Calculate the work done by a man of mass 65kg in climbing a ladder 4m high.
Solution work done= force x distance=weight x distance = mgh = 65kg x 10ms-2
x4m=2600J =2.6kJ
Example How much work is done in lifting a 3kg mass a height of 2m and in lowering it to its initial
position?
Solution (i) Since the force is directed up and the displacement is in the same direction, 0 . Hence
JmmskgmgsW 8.5828.93 2
(ii) Suppose we now slowly lower this mass to its original position. Again we must apply an upward force
of mg to prevent it from dropping. How much work is done by this force? Now the angle between that
force and the displacement is o180 and since cos180
o=-1, we have
W=-58.8J
The negative sign tells us that some other agent, gravity, has done work on the body. In this example,
there are two forces that act on the 3-kg mass: the force of gravity, which points downwards and the
tension in the string which pulls upward. If we had asked for the work done by the force of gravity, it
would have been negative during the lifting of weight and positive as the weight was lowered.
ENERGY: Energy is defined as the capacity to do work. A system may have mechanical energy by
virtue of its position, its internal structure or its motion. There are also other forms of energy besides

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
18
mechanical, namely chemical energy(found in foods, oils, charcoal, biogas etc and is due to the kinetic
energy and potential energy of the electrons within atoms), electrical energy(associated with the electric
charge and can be produced by generators from hydroelectric power stations-waterfalls, geothermal
stations, nuclear fission etc-), nuclear energy from a nuclear reactor, thermal energy (due to heat produced
from burning fuels, the sun, heaters etc).
It is a remarkable fact about our physical universe that whenever one form of energy is lost by a
body/system, this energy never disappears but it is merely translated into other forms of energy. eg
Vehicles burn fuels to produce both thermal(heat) and mechanical energy.
Mechanical Energy
It is the energy of motion-whether that energy is in action or stored. It exists in two forms:
Kinetic energy- energy possessed by a body by virtue of its motion and it represents the capacity of the
body to do work by virtue of its speed. A moving object can do work on another object it strikes. It exerts
a force on the other object causing it to undergo a displacement.
If a force F
acts on an object of mass m such that the mass accelerates uniformly from initial velocity vi
to a final velocity 1ms over a distance S (as shown),
Then the work done over the distance S is
SFW .
. But amF
and 2
2
1tatuS
. From the relation tauv
then a
uvt
so that the work done is
ekuvmSamW .2
1 22
which is the WORK-ENERGY RELATION (THEOREM). If the body starts from rest, then the work
done on the object equals kinetic energy gained by the object. The net work on an object is equal to the
change in the objects’ kinetic energy
Potential energy-energy possessed by a body by virtue of its configuration (position) in a force field eg
gravitational field, electrostatic field, magnetic field etc. If an object of mass m is lifted to a height h
from the ground, then:
Work done on the mass mghhFW
ie work done on the object gain in the potential energy by the object. Whether a body falls vertically or
slides down an inclined plane, the work done on it by gravity depends only on its mass and on the
difference in height between the initial and final positions. Potential energy of an object depends only on
its location and not on the route by which it arrived at that point. It follows that if a body is transported
around a closed path, the change in potential energy vanishes ie potential energy is independent of the
previous history because the gravitational force is conservative. A force is said to be conservative if the
work WAB done by the force in moving a body from A to B depends only on the position vectors rA and
rB. In particular, a conservative force must not depend on time, or on the velocity or acceleration of the
body.
F
S B A

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
19
Example A 100kg crate of milk is pushed up a frictionless 30o inclined plane to a 1.5m-high platform.
How much work is done in the process?
Solution The x component of mg is –mgsin30o. This force must be balanced by the applied force F to
prevent the crate from slipping down the plane. The work done by the force F is
cosFdW
Since F acts in the direction of motion, θ=0o and cosθ =1. The distance d over which the force acts is the
length of the incline namely
30sin
5.1 md Hence J
mmgW o 1470
30sin
5.1)30sin(
Example Suppose in the previous example the inclined plane is not frictionless and that the coefficient of
friction is 0.2. How much work is done in pushing the crate to the 1.5m-high platform?
Solution The work done against the force of gravity is the same as before 1470J. However, the applied
force must be greater than mgsin30 so as to overcome the force of friction which also acts in the –x
direction (opposite to the direction of motion). The force of friction is
NNmgRf o
kkk 170)866.0)(980(2.030cos
The work done against this frictional force is then
Jm
NdfW kn 51030sin
5.1)866.0)(980(2.0
where n indicates nonconservative forces. The total work done in bringing the crate to the platform is
JJJWpeW n 19805101470
POWER is the rate of doing work ie it is the rate at which energy is converted from one form to another.
Mathematically,
)( eraveragepowt
WP
Also since SFW
. , then velocityForcevFt
SF
t
WP
.
The unit of power is the Watt (W) which is the rate of work (transfer of energy) of one joule per second.
Power is also measured in horsepower (hp) where 1hp=746W. The efficiency of a machine or system is
the ratio of the power output to power input ie
Efficiency powerinput
tpoweroutpu
Example A manually operated winch is used to lift a 200kg mass to the roof of a 10m tall building.
Assuming that you can work at a steady rate of 200W, how long will it take you to lift the object to the
roof? Neglect frictional forces.
Solution The work done equals the increase in potential energy of the 200kg mass, namely
JmmskgmghW 19600108.9200 2
Since this work is done at a constant rate of 200W, then
sec98200
1960019600200
W
Jt
t
JW
Let us see how large an error may have been made by neglecting the kinetic energy of the mass during the
ascent. The average speed of the mass is
1102.0
sec98
10 msm
v

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
20
Kinetic energy during ascent is therefore
Jmskgmvek 04.1)102.0)(200(2
1
2
1. 12
an amount negligibly small compared with the change of 19600J in potential energy. We can therefore
safely neglect this small amount of k.e in the problem’s solution.

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
21
Chapter 2: Rotational Dynamics
2.1 Rigid Body
A rigid body is an object with a definite shape that does not change so that the particles comprising it stay
in fixed positions relative to one another (i.e. a body having a perfectly definite and unchanging shape
and size). Recall that the angular momentum for a single particle is expressed as;
L = r x p = mr x v
where r is the position vector of the particle (relative to origin) and p is the momentum. Total angular
momentum for a rigid body is the sum of the angular momentum of all particles in the body. If these
particles have masses m, velocities vi and the position vector ri (relative to a given origin of coordinates),
then the total angular momentum is
n
i
iii vrmL1
Where n is the total no. of particles. Note that the angular momentum obtained from the above formula
depends on the choice of origin coordinates.
Moment of Inertia (I)
Moment of inertia, (or angular mass, SI units kg·m2) is a measure of an object's resistance to changes in
its rotation rate. This is the rotational analogue of mass in linear motion. Consider a rigid body rotating
about a fixed axis O, and a particle A of the object makes an angle θ with a fixed line OY in space at
some instant.
The angular velocity ω of every particle is same everywhere. For a particle at A, the velocity is v1 = r1ω
(r1 = OA).
The total kinetic energy for the whole body is the sum of individual ke given by
)(2
1 22 mrke
Comparing this with ke for linear motion (ke = 1/2mv2) shows that the magnitude of Σmr
2 can be denoted
by the symbol I and is known as the moment of inertia of the object about its axis.
Torque on a rotating body
Consider a rigid body rotating about a fixed axis O.
Y
r1ω
r1
A
O

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
22
The force acting on a particle A = m1 x acceleration given by
11
2
2
1111 )(´
rm
dt
drmr
dt
dm
The moment of this force about the axis O = force x perpendicular distance from O which is
2
11111 rmrrm
The total moment of all forces (or total torque) is
I
mr
)( 2
Conservation of Angular Momentum
The angular momentum of one particle is
L = r x P
The rate of change of this momentum is
dt
dPrP
dt
drPr
dt
d
dt
dL
Taking the first term on RHS of the above equation we have
0)()( vvmmvvPdt
dr
While the second term is equal to force F (force is equal to rate of change of momentum).
This implies that
Frdt
dPr and
Frdt
dL
For a rigid body, the total angular momentum is the sum of angular momentum of individual particles and
the rate of change of the total angular momentum is the sum of the rates of change of individual angular
momentum.
m1
θ
Y
r1ω
A
r1
O

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
23
i.e.
n
i
ii Frdt
dL
1
Where Fi is the force acting on the particle i. But ri x Fi is the torque of the sum Fi on particle i. If the
forces acting on the particle are external and if the total external forces are such that the total external
torque is zero, then the angular momentum is conserved, i.e.
L = [constant].
This is the law of conservation of angular momentum. (i.e. The total angular momentum of a rotating
object remains constant if the net torque acting on it is zero)
Summary
Quantity Linear Rotational
Position x θ
Velocity v ω
Acceleration a α
Equations of
Motion
v= u + at
s = ut + 1/2at2
v2 = u
2 + 2as
ω = ωo + αt
θ = ωot +1/2αt2
ω2 = ωo
2 +2α θ
Mass m I
Newton’s 2nd
law F = ma τ = Iα
Momentum p= mv L = I ω
Work Fd τθ
KE 1/2mv2 1/2Iω

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
24
Chapter 3: Simple Harmonic Motion (SHM)
2.1 Introduction
A pendulum swinging back and forth, the vibration of a guitar string, a mass vibrating at the end of the
spring- these and all objects that vibrate have one thing in common: each system is subject to a restoring
force that increases with increasing distortion. A restoring force is one that tries to pull or push a
displaced object back to its equilibrium position. Whenever the system is displaced from equilibrium, rF
urges the system to return.
The record of its vibratory motion, a displacement versus time graph is at least sinusoidal or cosinusoidal
in form.
There are certain terms used to describe vibratory systems and we shall illustrate them by reference to the
figure above.
One complete vibration or cycle of the mass occurs when the mass vibrates from the position indicated by
point A to the point indicated by C or by any two other similar points that are in phase. It is called the
wavelength and the type of motion is periodic or vibratory motion.
The time taken for the system to undergo one complete vibration is the period T of the system. Since the
system will undergo T
1 complete vibrations in unit time, this quantity is the frequency of the vibration
and we have
T
f1
1
The dimensions of frequency are (time)-1
. Sometimes frequency is expressed in cycles or vibrations per
second. One cycle per second is denoted as one hertz (Hz) which is the SI unit of frequency.
The distance AD is the amplitude of the vibration. It is the distance from the equilibrium position (dashed
line) to the position of maximum displacement. It is only half as large as the total vertical distance
traveled by the mass.
2.2 Simple Harmonic Motion
Condition(s) a system must satisfy if its vibration is to be sinusoidal
Fr
Fr
(a)
Fr x
(b) (c)
0
O
y
O
a
O
c
O
b
O
d
O
Amplitude
λ
t
Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
25
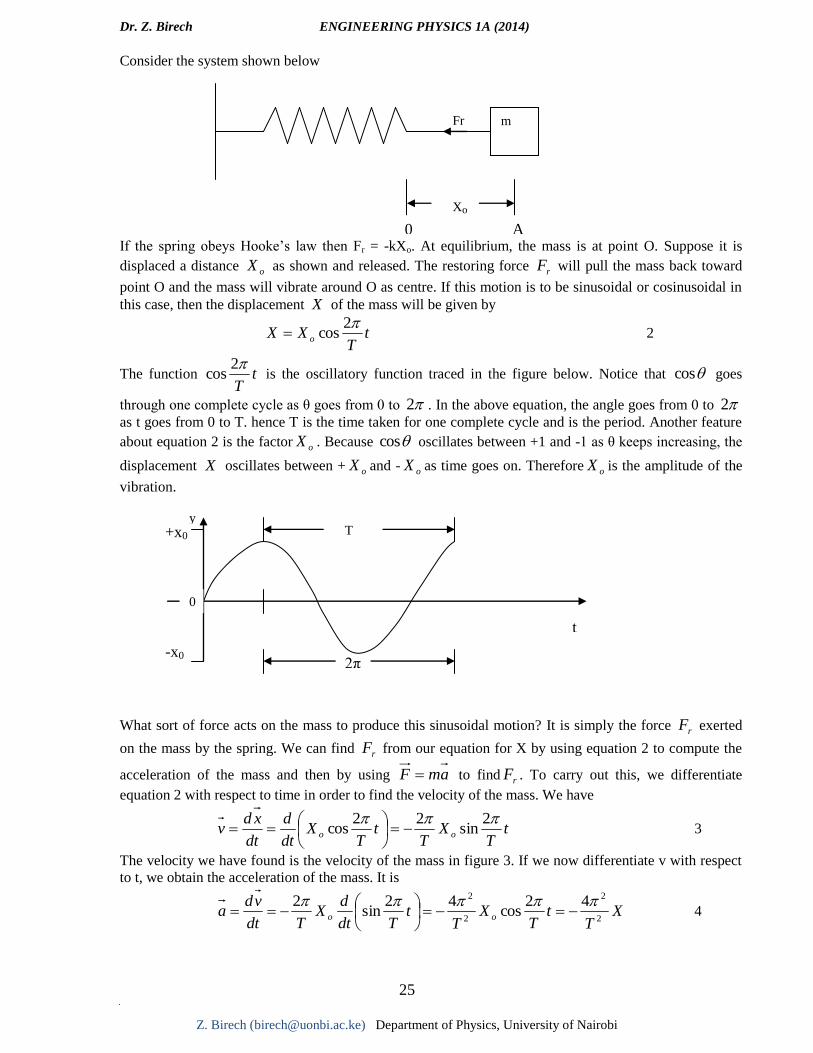
Consider the system shown below
If the spring obeys Hooke’s law then Fr = -kXo. At equilibrium, the mass is at point O. Suppose it is
displaced a distance oX as shown and released. The restoring force rF will pull the mass back toward
point O and the mass will vibrate around O as centre. If this motion is to be sinusoidal or cosinusoidal in
this case, then the displacement X of the mass will be given by
tT
XX o
2cos 2
The function tT
2cos is the oscillatory function traced in the figure below. Notice that cos goes
through one complete cycle as θ goes from 0 to 2 . In the above equation, the angle goes from 0 to 2
as t goes from 0 to T. hence T is the time taken for one complete cycle and is the period. Another feature
about equation 2 is the factor oX . Because cos oscillates between +1 and -1 as θ keeps increasing, the
displacement X oscillates between + oX and - oX as time goes on. Therefore oX is the amplitude of the
vibration.
What sort of force acts on the mass to produce this sinusoidal motion? It is simply the force rF exerted
on the mass by the spring. We can find rF from our equation for X by using equation 2 to compute the
acceleration of the mass and then by using amF to find rF . To carry out this, we differentiate
equation 2 with respect to time in order to find the velocity of the mass. We have
tT
XT
tT
Xdt
d
dt
xdv oo
2sin
22cos
3
The velocity we have found is the velocity of the mass in figure 3. If we now differentiate v with respect
to t, we obtain the acceleration of the mass. It is
XT
tT
XT
tTdt
dX
Tdt
vda oo 2
2
2
2 42cos
42sin
2
4
Fr m
Xo
0
O
A
+x0 y
O
2π
0
O
T
t
-x0

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
26
The acceleration of the mass is proportional to the negative displacement. This acceleration is caused by
the unbalanced restoring force rF . Therefore amF becomes
XT
mFr 2
24 5
The restoring force is opposite in direction to the displacement X, a condition that is inherent in the nature
of restoring forces. In addition, the restoring force is proportional to the displacement and this is
equivalent to saying that the system obeys Hooke’s law. Thus we have arrived at the following result: a
system that vibrates sinusoidally obeys Hooke’s law in which the restoring force is proportional to the
distortion. Such a system obeys equation 2 and is called simple harmonic motion. Hence to test whether
or not a vibratory system obeys a sinusoidal equation, we simply check to see that the system obeys
Hooke’s law.
From Hooke’s law, the sprig constant k is the proportionality constant so that
kXFr (Hooke’s law)
This relation simply states that the restoring force is proportional to the distortion and is directed opposite
to the direction. If we compare this form of Hooke’s law and equation 5, we see that
mT
k2
24 or
k
mT 2 6
This is a very important relation because it gives the period of vibration of the mass m in terms of the
spring constant k. the period of vibration is long for large mass(for large inertia) and for small k (because
the force exerted by the spring is small). The frequency of vibration can also be found from T
f1
and
from equations 3 and 6 we have, for velocity,
TT
Xm
kv o
2sin 7
Squaring this equation and adding it to the square of equation 2 gives
)( 22222 XXm
kvXXv
k
moo 8
Notice that v is maximum when OX , that is, when the system passes through equilibrium.
Example When a 30g mass is hung from the end of a spring, the spring stretches 8.0cm. this same spring
is used in the experiment with a 200g mass at its end. The spring is stretched 5.0cm and released. If we
assume that the spring slides without friction, find the following for the mass: (a) period of vibration (b)
frequency (c) acceleration as a function of X (d) speed of the mass as it goes through the equilibrium
position.
Solution First we must find the spring constant. In a stretching experiment,
1
2
7.3080.0
8.930.0
Nmm
mskg
stretch
forcestretchingk
(a) sNm
kg
k
mT 466.1
7.3
200.022
1
(b) HzT
f 682.01
(c) XsXkg
Nm
m
kX
m
Fa r 2
1
5.18200.0
7.3
Why is the acceleration greatest at the extreme of the vibration? Why is it zero when X=0?

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
27
(d) When X=0, 1215.0 ms
m
kXv oo
Energy Considerations
When a spring is stretched a distance oX and the mass is at rest, the energy (all the energy is potential
energy) stored in the stretched spring is
2
2
1os kXU
Because the mass is at rest at (a), kinetic energy K is zero. The restoring force of the spring accelerates
the mass toward the left in (a) by the time the system reaches the configuration in (b), the spring is no
longer distorted so 0sU . The energy originally stored in the spring has been changed to kinetic
energy. Thus in (b) we have2
2
1okXK .
Since K has now achieved its maximum value, the velocity of the mass is largest. But because 0rF in
(b), the acceleration of the mass is zero. In general
1. The energy changes back and forth from sU to K. At the ends of the path, 0K and sU is
maximum. At the centre, 0sU and K is maximum.
2. The velocity of the mass is largest as the mass passes through the centre. It is zero when the mass
is at either end of the path.
3. The acceleration is zero at the midpoint and is maximum at the two ends.
At any point X the total energy of the system is
Total energy 22
2
1
2
1mvkXKU s
Since the total energy stored in the spring is2
2
1okX , we arrive at a very important relation stating how
the energy of the system is apportioned:
222
2
1
2
1
2
1mvkXkXo 9
If we solve this equation for v we obtain equation 8.
X Us K v a
X0
1/2kXo2
0
0
-am
0
0
1/2kXo2
vm
0
-Xo
1/2kXo2
0
0
am
0
0
1/2kXo2
vm
0
Xo
1/2kXo2 0 0 -am
(a)
(b)
(c)
(d)
(e)
Fr = 0
Fr = 0
Fr
Fr
Fr

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
28
Another vibratory system of interest is the pendulum. The pendulum mass oscillates back and forth
between the positions shown. At positions A and C, the energy is all potential og mgyU . At any other
position where the bob’s height is y, we have
Total energy 2
2
1mvmgymgyKU og
This is the basic energy equation for a pendulum. Other vibratory systems can be analyzed in a similar
way. In all of them, interchange between U and K occurs. The mass is moving fastest when the system is
moving through its equilibrium configuration because then all the energy is kinetic.
Example Suppose the pendulum below is released from a position where .20cmyo Find the speed of
the mass at (a) point B and (b) when the value of cmy 30.1 .
Solution Using the energy method, we can write
2
2
1mvmgymgyo
from which we have )(2 yygv o
(a) Using 0y gives 12 626.0)020.0(8.92 msmmsv
(b) In the same way with my 0130.0 we find 137.0 msv
Equation of motion for SHM
Simple harmonic motion occurs if the system obeys Hooke’s law where the restoring force is proportional
to the distortion. For a distortion X, this requires that
kXFr
where k is the spring constant and the negative sign is arising since it is a restoring force. When X is
positive, Fr will be directed toward –X. the equation of motion for a mass-spring system is obtained by
writing amF for the system. Since rFF in this case, we have
makX
However the acceleration itself depends on X because
2
2
dt
Xd
dt
Xd
dt
d
dt
vda
Thence the equation of motion becomes
Xm
k
dt
Xd
2
2
.
This is the typical equation of motion for SHM. Mathematicians call it a differential equation. When you
study differential equations, you will learn that in term of periodic motion the solution of this equation is
)2sin( oo ftXX
A
A C
yo

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
29
where m
kf
2
1
The constant Xo is the amplitude of the vibration and o is an arbitrary phase constant. The result
confirms that a system obeying Hooke’s law gives rise to sinusoidal vibration with the frequency given
above.
Example The spring-mass system shown below is vertical and is therefore influenced by the force of
gravity. Does it still undergo SHM?
Solution
The force acting on the mass is
mgkyF
Where down is taken as positive. Using the maF gives
2
2
dt
ydmmgky
Let us change variables from y to 1y where
k
mgyy 1
Notice from the figure that k
mg is simply the amount the spring stretches due to the weight of the mass.
By changing variables, we subtract this change in spring length. The quantity 1y is simply the
displacement from the equilibrium position of the loaded spring. With this new variable, the equation of
motion becomes
12
1
2
kydt
ydm
And so the coordinate 1y undergoes simple harmonic motion with the frequency as though gravity were
not present. We therefore conclude that gravity shifts the equilibrium point but does not otherwise affect
the vibration.
Fr y

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
30
Chapter 4: Gravitation
4.1 Introduction
The force that binds together progressively larger structures from star to galaxy to supercluster and may
be drawing them all toward the great attractor is the gravitational force. This force not only holds you on
Earth but also reaches out across intergalactic space.
Physicists like to study seemingly unrelated phenomena to show that a relationship can be found if they
are examined closely enough. This search for unification has been going on for centuries. For example, in
1665 Isaac Newton made a basic contribution to physics when he showed that the force that holds the
Moon in its orbit is the same force that makes an apple fall. We take this so much for granted now that it
is not easy for us to comprehend the ancient belief that the motions of earthbound bodies and heavenly
bodies were different in kind and were governed by different laws.
Newton concluded that not only does Earth attract an apple and the Moon but every body in the universe
attracts every other body: this tendency of bodies to move toward each other is called gravitation.
Newton’s conclusion takes a little getting used to, because the familiar attraction of Earth for earthbound
bodies is so great that it overwhelms the attraction that earthbound bodies have for each other. For
example, Earth attracts an apple with a force magnitude of about 0.8N. You also attract a nearby apple
(and it attracts you), but the force of attraction has less magnitude than the weight of a speck of dust.
Quantitatively, Newton proposed a force law that we call Newton’s law of gravitation: Every particle
attracts any other particle with a gravitational force whose magnitude is given by
2
21
r
mmGF
Here 1m and 2m are the masses of the particles, r is the distance between them and G is the gravitational
constant, with a value that is given by
213112211 1067.61067.6 skgmkgNmG
As the figure below shows, a particle 2m attracts a particle 1m with a gravitational force F that is
directed toward particle 2m and particle 1m attracts particle 2m with a gravitational force F that is
directed toward 1m .
The forces F and F form a third law force pair; they are opposite in direction but equal in magnitude.
They depend on the separation of the two particles, but not their location: the particles could be a deep
cave or in deep space. Also the forces F and F are not altered by the presence of other bodies, even if
those bodies lie between the two particles we are considering.
The strength of the gravitational force ie how strongly two particles with given masses at a given
separation attract each other, depends on the value of the gravitational constant G. If G, by some miracle,
were suddenly multiplied by a factor of 10, you would be crushed to the floor by earth’s attraction. If G
were divided by this factor, earth’s attraction would be weak enough that you could jump over a building.
F
-F
m2
m1 r

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
31
Although Newton’s law of gravitation applies strictly to particles, we can also apply it to real objects as
long as the sizes of the objects are small compared to the distance between them. The moon and earth are
far enough apart so that to a good approximation, we can treat them both as particles. But what about an
apple and earth? From the point of view of the apple, the broad and level earth stretching out to the
horizon beneath the apple certainly does not look like a particle. Newton solved the apple-earth problem
by proving an important theorem called the shell theorem: A uniform spherical shell of matter attracts a
particle that is outside the shell as if all the shell’s mass were concentrated at its centre. Earth can be
thought of as a nest of such shells, one within another and each attracting a particle outside earth’s surface
as if the mass of that shell were at the center of the shell. Thus from the apple’s point of view, earth does
behave like a particle one that is located at the centre of earth and has a mass equal to that of earth.
Example Assuming the orbit of the earth about the sun to be circular with radius m11105.1 , find the
mass of the sun.
Solution
The centripetal force needed to hold the earth in an orbit of radius R is furnished by the gravitational
attraction of the sun. We therefore have
Centripetal force gravitational force
G
Rvm
R
mGm
R
vmS
SEE
2
2
2
where v is the speed of the earth in its orbit around the sun. Since the earth travels around its orbit once
each year or in a time of s71015.3 then we have
14
7
11
100.31015.3
)105.1(2
ms
s
mv
from which
kgmS
30100.2
4.2 Gravitation near Earth’s Surface
Escape velocity
Is the maximum initial velocity that will cause a projectile to move upward forever, theoretically coming
to rest only at infinity.
If you fire a projectile upward, usually it will slow, stop and return to Earth. There is, however, a certain
minimum initial velocity that will cause it to move upward forever, theoretically coming to rest only at
infinity. This initial velocity is called the (Earth’s) escape velocity.
Consider a projectile of mass m leaving the surface of a planet or some other astronomical body or system
with escape velocity v . It has a kinetic energy K given by 2
2
1mv and potential energy U given by
R
GMmU
In which M is the mass of the planet and R is its radius. When the projectile reaches infinity, it stops and
thus has no kinetic energy. It also has no potential energy because this is our zero-potential-energy
configuration. Its total energy at infinity is therefore zero. From the principle of conservation of energy,
its total energy at the planet’s surface must also have been zero so that
R
GMv
R
GMmmvUK
20
2
1 2
The escape velocity’s does not depend on the direction in which a projectile is fired from a planet.
However, attaining that speed is easier if the projectile is fired in the direction the launch site is moving as

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
32
the planet rotates about its axis. For example, rockets are launched eastward at Cape Canaveral to take
advantage of the Cape’s eastward speed of 1500km/h due to Earth’s rotation.
The equation above can be applied to find the escape velocity of a projectile from any astronomical body
provided we substitute the mass of the body for M and the radius of the body for R. the table below shows
some escape velocities from some astronomical bodies.
Body Mass (kg) Radius (m) Escape speed (km/s)
Ceresa
211017.1 5108.3 0.64
Earth’s moon 221036.7
61074.1 2.38
Earth 241098.5
61037.6 11.20
Jupiter 271090.1
71015.7 59.50
Sun 301099.1
81096.6 618
Sirius Bb
30102 7101 5200
Neutron starc
30102 4101
5102
a- the most massive of the asteroids
b- a white dwarf(a star in a final stage of evolution) that is a companion of the bright star Sirius
c- the collapsed core of a star that remains after that star has exploded in a supernova event.
4.3 Planets And Satellites: Kepler’ Laws
The motions of the planets, as they seemingly wander against the background of the stars, have been a
puzzle since the dawn of history. The loop-the-loop motion of Mars was particularly baffling. Johannes
Kepler (1571-1630), after a lifetime of study, worked out the empirical laws that govern these motions.
Tycho Brahe (1546-1601), the last of the great astronomers to make observations without the help of a
telescope, compiled the extensive data from which Kepler was able to derive the three laws of planetary
motion that now bear his name. Later Newton 91642-1727) showed that his law of gravitation leads to
Kepler’s laws.
In this section we discuss each of Kepler’s law in turn. Although here we apply the laws to planets
orbiting the sun, they hold equally well for satellites, either natural or artificial, orbiting Earth or any other
massive central body.
1 THE LAW OF ORBITS: All planets move in elliptical orbits, with the sun at one focus.
The figure below shows a planet of mass m moving in such an orbit around the sun, whose mass is M. We
assume that mM so that the centre of mass of the Planet-Sun system is approximately at the centre of
the Sun. the orbit in the is described by giving its semimajor axis a and its eccentricity e, the latter defined
so that ea is the distance from the centre of the ellipse to either focus F or F`. An eccentricity of zero
corresponds to a circle, in which the two foci merge to a single central point. The eccentricities of the
planetary orbits are not large so that the orbits look circular.eg the eccentricity of the Earth’s orbit is only
0.0167.
m
r
F
M θ
Ra
F’
ea ea
a

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
33
2 THE LAW OF AREAS: A line that connects a planet to the Sun sweeps out equal areas in the
plane of the planet’s orbit in equal times; that is the rate dt
dA at which it sweeps out area A is
constant. Qualitatively, this law tells us that the planet will move most slowly when it is farthest from the sun and
most rapidly when it is nearest to the sun. As it turns out Kepler’s second law is totally equivalent to the
law of conservation of momentum as proved below.
The area of the shaded wedge in the figure below closely approximates the area swept out in time t by
a line connecting the sun and the planet, which are separated by a distance r. the area A of the wedge is
approximately the area of a triangle with base r and height r. since the area of a triangle is one-half of
the base times the height, then
2
2
1rA
In the limit 0t , 22
2
1
2
1r
dt
dr
dt
dA (1)
in which is the angular speed of the rotating line connecting Sun and Planet. Figure (b) shows the
linear momentum p of the planet, along with its radial and perpendicular components. The magnitude of
the angular momentum L of the planet about the Sun is given by the product of r and p , the
component of p perpendicular to r. here, for a planet of mass m,
2))(())(( mrmrrmvrrpL (2)
where we have replaced v with its equivalent 2r . From equation 1 we have
m
L
dt
dA
2 (3)
If dtdA is constant, as Kepler said it, then equation 3 means that L must also be constant-angular
momentum is conserved. Kepler’s second law is indeed equivalent to the law of conservation of angular
momentum.
3 THE LAW OF PERIODS: The square of the period of any planet is proportional to the cube of the
semimajor axis of its orbit
Consider the circular orbit with radius r (the radius of a circle is equivalent to the semimajor axis of an
ellipse) in the figure below.
r
dθ
m
Pr
P┴
r
m
θ θ
rΔθ

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
34
Applying Newton’s second law )( maF to the orbiting planet yields
))(( 2
2rm
r
GMm (4)
If we useT
2 , where T is the period of the motion, then we obtain Kepler’s third law
3
22 4
rGM
T
(5)
The quantity in parentheses is a constant that depends only on the mass M of the central body about
which the planet orbits. Equation 5 holds also for elliptical orbits, provided we replace r with a, the
semimajor axis of the ellipse. This law predicts that the ratio 3
2
a
T has essentially the same value for every
planetary orbit around a given massive body. The table below shows how well it holds for the orbits of
the planets of the solar system.
Table: Kepler’s Law of Periods for the Solar System
Planet semimajor axis a (1010
m) period T (yrs) )10( 3234
3
2 my
a
T
Mercury 5.79 0.241 2.99
Venus 10.8 0.615 3.00
Earth 15.0 1.00 2.96
Mars 22.8 1.88 2.98
Jupiter 77.8 11.9 3.01
Saturn 143 29.5 2.98
Uranus 287 84.0 2.98
Neptune 450 165 2.99
Pluto 590 248 2.99
4.4 Satellites: Orbits And Energy
As a satellite orbits Earth on its elliptical path, both its speed, which fixes its kinetic energy K, and its
distance from the center of Earth, which fixes its gravitational potential energy U, fluctuates with the
fixed periods. However, the mechanical energy E of the satellite remains constant. (Since the satellite’s
mass is so much smaller than Earth’s mass, we assign U and E for the Earth-satellite system to the
satellite a lone. The potential energy of the system is give by
m
M
r θ

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
35
r
GMmU (0)
(with 0U for infinite separation). r is the radius of the orbit, assumed for the time being to be circular,
and M and m are the masses of Earth and the satellite, respectively. To find the kinetic energy of a
satellite in a circular orbit, we write Newton’s second law as
r
vm
r
GMm 2
2 (1)
where r
v 2
is the centripetal acceleration of the satellite. Then from 1, the kinetic energy is
r
GMmmvK
22
1 2 (2)
which shows that for a satellite in a circular orbit,
2
UK (3)
The total mechanical energy of the orbiting satellite is
r
GMm
r
GMm
r
GMmUKE
22 (4)
This tells us that for a satellite in a circular orbit, the total energy E is the negative of the kinetic energy
K:
KE (5)
For a satellite in an elliptical orbit of semimajor axis a, we can substitute a for r in equation 4 to find the
mechanical energy as
a
GMmE
2 (6)
Equation 6 tells us that the total energy of an orbiting satellite depends only on the semimajor axis of its
orbit and not on its eccentricity e. eg four orbits with the same semimajor axis are shown in figure a
below. The same satellite would have the same total mechanical energy E in all four orbits. Figure b
shows the variation of K, U and E with r for a satellite moving in a circular orbit about a massive central
body.
Example A playful astronaut releases a bowling ball, of mass m = 7.20kg, into circular orbit about Earth
at an altitude h of 350km.
(a) What is the mechanical energy E of the ball in its orbit? (b) What is the mechanical energy oE of the
ball on the launch pad at say Cape Canaveral? From there to the orbit, what is the change E in the
ball’s mechanical energy?
Solution (a) the key idea here is that we can get E from the orbital energy, given by equation 4, if we first
find the orbital radius r. that radius is
e = 0
e = 0 e = 0.5
e = 0.8
e = 0.9
m
r
U(r)
E(r)
Energy
K(r)

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
36
mkmkmhRr 61072.63506370
in which R is the radius of Earth. Then from equation 4, the mechanical energy is
MJJm
kgkgkgNm
r
GMmE 2141014.2
1072.62
)20.7)(1098.5)(1067.6(
2
8
6
242211
Solution (b) the key idea is that, on the launch-pad, the ball is not in orbit and thus equation 4 does not
apply. Instead we must find oo UKE 0 , where oK is the ball’s kinetic energy and oU is the
gravitational potential energy of the ball-Earth. To find oU , we use equation 0 to write
MJJm
kgkgkgNm
R
GMmU o 4511051.4
1037.6
)20.7)(1098.5)(1067.6( 8
6
242211
The kinetic energy oK of the ball is due to the ball’s motion with Earth’s rotation. You can show that
oK is less than 1MJ, which is negligible relative to oU . Thus the mechanical energy of the ball on the
launch pad is
MJMJUKE ooo 4514510
The increase in the mechanical energy of the ball from launch pad to orbit is
MJMJMJEEE o 237)451()214(
Chapter 5: Properties of Matter
5.1 Pressure
Pressure is defined as the average force per unit area at the particular region of fluid (liquid or gas) ie
A
FP
where F is the normal force due to the liquid on the side of area A . At a given point in a liquid, the
pressure can act in any direction ie pressure is a scalar quantity. If the pressure were not the same, there
would be an unbalanced force on the fluid at that point and the fluid would move. The logical basis for
the statement that pressure is exerted equally in all directions, then, is simply that otherwise the parts of
the fluid would not be in equilibrium. Also pressure increases with depth, h , below the liquid surface and
with its density so that
hgP
When g is in ms-2
, h is in m and ρ is in kgm-3
, then the pressure is in Newton per meter squared (Nm-2
).
The bar is a unit of pressure used in meteorology and by definition,
1 bar 105 Nm
-2
The Pascal (Pa) is the name given to a pressure of 1 Nm-2
. Thus
1 bar 105Pa
Pressure is often expressed in terms of that due to a height of mercury (Hg). One unit is the torr (after
Torricelli);
1torr 1mmHg 133.3Nm-2
From hgP it follows that the pressure in a liquid is the same at all points on the same horizontal
level in it. Thus a liquid filling the vessel shown below rises to the same height in each section if ABCD
is horizontal.

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
37
Fig Pressure in a vessel is independent of the cross-section
Atmospheric Pressure
A barometer is an instrument for measuring the pressure of the atmosphere which is required in weather
forecasting. It consists of a vertical tube about a meter long containing mercury with a vacuum at the
closed top. The other end of the tube is below the surface of mercury contained in a vessel B.
The pressure on the surface of the mercury in B is atmospheric pressure A and since the pressure is
transmitted through the liquid, the atmospheric pressure supports the column of mercury in the tube.
Suppose the column is a vertical height H above the level of the mercury in B. then if H760mm0.76m
and ρ = 13600kgm-3
, we have
gHP 0.76136009.8 1.013105Nm
-2
The pressure at the bottom of a column of mercury 760mm high for a particular density and value of g is
known as standard pressure or one atmosphere. By definition,
1 atmosphere 1.01325105 Nm
-2
Standard temperature and pressure is 0oC and 760mmHg. It should be noted that the pressure P at a place
X below the surface of a liquid is given by HgP where H is the vertical distance of X below the
surface. In fig ii above, a very long barometer tube is inclined at an angle of 60o to the vertical. The
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- - - - - - - - - - - -- - - - - - - - - - - - - - - - - - - - -- - - - -
A B C D
H = 760mm
A 760mm = h
B
vacuum
x A
B

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
38
length of mercury along the slanted side of the tube is x mm say. If the atmospheric pressure is the same
as in i, then the vertical height to the mercury surface is still 760mm.
So
mmxx o 15205.0
760
60cos
76076060cos
5.2 Archimedes’ Principle
An object immersed in a fluid experiences a buoyant (upthrust) force equal to the weight of the fluid that
it displaces
Application of the principle
The buoyant force of a fluid on an object depends on the weight of fluid displaced and thus on the density
of the fluid and the volume of the fluid displaced (since VDM ). In the case of a totally immersed
object, the volume of fluid displaced is just equal to the volume of the object, and therefore if the buoyant
force is measured and the fluid density known, the density of the object can be readily calculated. From
this known volume and its mass, the density of the object may be found. It is not easy to measure directly
the volume of irregularly shaped objects with great accuracy, but Archimedes’ principle provides a way to
find volume accurately, since only balance measurements are needed.
If two substances have densities D1 and D2, then the density of the second substance relative to the first is
D2/D1. Sincevolume
massdensity , then
2
22
V
mD and
1
11
V
mD
If one compares equal volumes of the two substances so that V2 = V1, then the relative density1
2
1
2
m
m
D
D ,
showing that the relative density will equal the ratio of their masses or their weights. The density of a
substance relative to that of water is called the specific gravity of the substance ie the specific gravity of a
substance is equal to the density of the substance divided by the density of water or the specific gravity of
a substance is equal to the weight of a certain volume of the substance divided by the weight of an equal
volume of water. In accurate work it is necessary to specify the temperature at which the measurements
are made.
Example A chunk of copper suspended from a balance weighs 156.8g in air. When it is completely
surrounded by pure water at 20oC, the reading on the balance is 139.2g. Calculate the specific gravity of
copper.
Solution
The weight of copper in air = 156.8g
The apparent weight of copper in water = 139.2g
Therefore the buoyant force of the water = 156.8-139.2 = 17.6g
By Archimedes’ principle, the weight of the displaced water = 17.6g
The specific gravity of the copper = waterofvolumeequalofweight
Copperofweight
But the volume of the displaced water is equal to the volume of the copper which displaces it. Therefore
The specific gravity of copper = 91.86.17
8.156
g
g.

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
39
Therefore the density of the copper in this sample is 8.91 times the density of pure water at 20oC. When
the specific gravity of a substance is known, its density in any units can be calculated from the known
density of water.
Wherever the force of gravity acts on a fluid, the fluid exerts a buoyant force as a result of difference in
pressure at different levels. Every fish and submarine in the sea is buoyed up by a force equal to the
weight of water displaced. To remain submerged these objects must have a weight equal to or greater than
the buoyant force. If they wish to move from one level to another, the balance between the force of
gravity and the buoyant force must be disturbed. Some fish can rise by expanding their bodies, thereby
displacing more water. Submarines are made to rise by decreasing their weight by forcing water out of
their ballast tanks. The air of the earth’s atmosphere also exerts a buoyant force on all objects immersed
in it eg Balloons utilize the buoyancy of air. If a gas such as hydrogen or helium is used to inflate a light-
weight plastic envelope, the buoyancy force of the air can be considerably greater than the weight of the
balloon. Such balloons are used in making high altitude measurements of various properties of the
atmosphere.
Example A weather balloon has a volume of 0.5m3 when inflated. The weight of the envelope is 350g. If
the balloon is filled with helium, what weight of instrument can it carry a loft? The density of air is
1.29kgm-3
and the density of helium is 0.138 times the density of air.
Solution
By Archimedes’ principle, the buoyant force of the air is =the weight of air displaced=the weight of 0.5m3
of air
=0.5m31.29kgm
-3=0.65kg=650g
Since the relative density of helium is 0.138(air1), the weight of helium in the balloon is
=0.138650g=90g
Therefore the weight of the balloon and helium =350g+90g=440g
The excess of the buoyant force over the force of gravity=650g - 440g=210g
Therefore if an unbalanced force of 10g is left available to produce upward acceleration, the weight of the
instrument load can be 200g.
Floating at the surface of liquids
According to Archimedes’ principle, if a liquid is displaced by a solid, the liquid exerts a buoyant force
on the solid. This is true for any fraction of the solid that displaces liquid eg when a boy is lifting a stone
out of water, he does not have to support the full weight of the stone until it is completely clear of the
water. When half of the stone’s volume is submerged, the buoyant force is half of the buoyant force when
it is completely submerged. Suppose that an object is placed in a liquid of density greater than that of the
object. The buoyant force of the liquid will equal the force of gravity before the solid is completely
submerged. To go beyond this point of equilibrium, requires then an extra downward force to be applied.
If it is not, the object remains in equilibrium under the action of balanced forces: it floats. When an object
that will float is placed into a liquid, it will sink into the liquid until the weight that it displaces is equal to
its own weight. This relation, a direct consequence of Archimedes’ principle, is sometimes called the law
of flotation.
Example A block of wood weighing 120g has a volume of 180cm3. What fraction of its volume would be
submerged when floating in alcohol of density 0.80gcm-3
?
Solution For the block to float, it must displace 120g of alcohol. The volume of 120g of alcohol=
3
3150
80.0
120cm
gcm
g
To displace 150cm3 of alcohol, the block will have to have 150cm3 of its volume submerged.

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
40
The fraction submerged 6
5
180
150
Archimedes’ principle provides the basis for the design of ships made of steel. For a steel vessel to float it
is only necessary to spread the steel around so that it can displace an amount of water having a weight that
exceeds the weight of the steel.
Example A steel box is constructed to make a cube 10cm on a side, from material 0.20cm thick. What
weight of contents is possible before the box sinks in a liquid of specific gravity 1.2? The density of steel
is 7.0gcm-3
Solution The volume of the box is (10cm)3=1000cm
3
The maximum buoyant force that the liquid can provide is ggcmcm 12000.12.11000 33
The weight of the box which has 6 sides, each 10cm square and 0.2cm thick, and which is made of steel
of density 7gcm-3
is
ggcmcmcmcm 84072.010106 3
The excess of buoyant force over weight is
ggg 3608401200
If material is added to the box, it will continue to float until the weight of the contents exceeds 3.6102g.
Hydrometers
The relation between fluid density and floating provides basis for the construction and use of
hydrometers. Hydrometers usually consist of a hollow tube weighted at one end and having a graduated
scale at the other end. In a liquid, the weighted end ensures that the instrument floats upright. The depth to
which it sinks will depend on the density of the fluid. The higher the density of the liquid, the greater will
be its buoyant force per unit volume of the hydrometer immersed. When the scale is graduated using
liquids of known density, the hydrometer may be used to measure the density of unknown liquids. A
number of specialized hydrometers are used for the determination of specific gravity: in dairies for milk,
in automobile service stations for antifreeze and battery acids, in chemical laboratories for determining
the composition of aqueous solutions (in a 12.5% sugar solution at 13oC, a hydrometer would indicate a
specific gravity of 1.05).
5.3 Fluids in motion
A stream / river flows slowly when it runs through open country and faster through narrow openings or
constrictions This is due to the fact that water is practically an incompressible fluid ie changes of pressure
cause practically no change in fluid density at various parts. Figure below shows a tube of water flowing
steadily between X and Y where X has a bigger cross-sectional area A1 than the party of cross-sectional
area A2. The streamlines of the flow represent the directions of the velocities of the particles of the fluid
and the flow is uniform or laminar.
A2
Q
R
P
A1
l1
l2
S

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
41
Assuming the liquid is incompressible, then if it moves from PQ to RS, the volume of liquid between P
and R is equal to the volume between Q and S. Thus
2
1
1
22211
A
A
l
llAlA
where 1l is PR and 2l is QS. Hence 2l is greater than 1l . Consequently the velocity of the liquid at the
narrow part of the tube, where the streamlines are closer together, is greater than at the wider part Y
where the streamlines are further apart. For the same reason, slow-running water from a tap can be made
into a fast jet by placing a finger over the tap to narrow the exit.
Bernoulli’s principle
Bernoulli obtained a relation between the pressure and velocity at different parts of a moving
incompressible fluid. If viscosity is negligibly small, there are no frictional forces to overcome. Hence the
work done by the pressure difference per unit volume of a fluid flowing a long a pipe steadily is equal to
the gain in kinetic energy per unit volume plus the gain in potential energy per unit volume. The work
done by a pressure in moving a fluid through a distance=force distance moved=pressure area distance moved=pressure volume.
At the beginning of the pipe where the pressure is P1, the work done per unit volume on the fluid is P1; at
the other end the work done per unit volume is P2 . Hence the net work done on the fluid per unit volume
=P1-P2. The kinetic energy per unit volume=2
1mass per unit velocity
2 =
2
1ρvelocity
2 where ρ is the
density of the fluid. Thus if v2 and v1 are the final and initial velocities respectively at the end and the
beginning of the pipe, the the kinetic energy gained per unit volume= )(2
1 2
1
2
2 vv .
Further, if h2 and h1 are the respective heights measured from a fixed level at the end and beginning of the
pipe, the potential energy gained per unit volume =mass per unit volume g 12 hh = 12 hhg .
Thus from the conservation of energy
)()(2
112
2
1
2
221 hhgvvPP
2
2
221
2
112
1
2
1ghvpghvP
Therefore
ghvP 2
2
1Constant
where P is the pressure at any part and v is the velocity there. Hence, for streamline motion of an
incompressible non-viscous fluid,
The sum of the pressure at any part plus the kinetic energy per unit volume plus the
potential energy per unit volume there is always a constant.
This is known as Bernoulli’s principle. The principle shows that at points in a moving fluid where the
potential energy change gh is very small, or zero as in flows through a horizontal pipe, the pressure is
low where the velocity is high; conversely, the pressure is high where the velocity is low.
Example As a numerical illustration, suppose the area of cross-section A1 of X in the figure above is
4cm2, the area A2 of Y is 1cm
2 and water flows past each section in laminar flow at the rate of 400cm
3s
-1,
then
at X speed v1 of water=11
2
13
11004
400sec
mscmscm
scm
area
ondvolumeper

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
42
at Y speed v2 of water=11
2
13
44001
400
mscmscm
scm
The density of water31000 kgm . So if P is the pressure difference, then
23222
1
2
2 105.71410002
1
2
1 NmvvP
Therefore mg
PhhgP 77.0
8.91000
105.7 3
The pressure head is thus equivalent to 0.77m of water.
Applications of Bernoulli’s principle
1. A suction effect is experienced by a person standing close to the platform at a station when a fast train
passes. The fast-moving air between the person and the train produces a decrease in pressure and excess
air pressure on the other side pushes the person towards the train.
2. Filter pump. A filter pump has a narrow section in the middle, so that a jet of water from the tap flows
faster here. This causes a drop in pressure near it and air therefore flows in from the side tube to which a
vessel is connected. The air and water together are expelled through the bottom of the filter pump.
3. Aerofoil lift. The curved shape of an aerofoil creates a faster flow of air over its top surface than the
lower one. This is shown by the closeness of the streamlines above the aerofoil compared with those
below. From Bernoulli’s principle, the pressure of the air below is greater than that above, and this
produces the lift on the aerofoil.
4. Flow of a liquid from wide tank. Consider the figure below. At the top X of the liquid in the tank, the
pressure is atmospheric say B, the height measured from a fixed level such as the hole H is h, and the
kinetic energy is negligible if the tank is wide so that the level falls very slowly. At the bottom, Y near H,
the pressure is again B, the height is zero and the kinetic energy is2
2
1v where is the density and v is
the velocity of emergence of the liquid. Thus from Bernoulli’s principle,
ghvvBghB 22
1 2
Thus the velocity of the emerging liquid is the same as that which would be obtained if it fell through a
height h and this is Torricelli’s theorem. In practice the velocity is less than that given by gh2 owing
to viscous forces and the lack of streamline flow.
Example Water flows steadily a long a horizontal pipe at a volume rate of132108 sm . If the area of
cross-section of the pipe is 40cm2, calculate the flow velocity of the water. Find the total pressure in the
pipe if the static pressure in the horizontal pipe is Pa4100.3 , assuming the water is incompressible,
non-viscous and its density is 1000kgm-3. What is the new flow velocity if the total pressure is
Pa4106.3 .
i Velocity of water=1
4
3
21040
108sec
ms
area
ondvolumeper
ii Total pressure=static pressure Pav 42
42 102.32
21000100.3
2
1
iii 2
2
1v total pressure- static pressure
Therefore 4442 106.0100.3106.31000
2
1 v
.5.3500
106.0 14
msv

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
43
5.4 Elastic Properties of Matter
A perfect rigid body has constant distance between two particles (not true in practice), i.e most
bodies get deformed under an applied force and the body has a tendency to regain its original size
and shape when the force is removed. This property of the body that tends to regain its shape or
size when deforming forces are removed is called elasticity. A perfectly elastic body retains its
original shape/size very quickly, while if it regains slowly then it is called a perfectly plastic
body. Solids tend to resist change of both shape and volume and hence they posses rigidity or
shear elasticity as well as volume elasticity. Liquids on the other hand tend to resist change in
volume and not shape (they posses only volume elasticity).
Stress
When a body experiences a deforming external force, different particles in it are displaced, and
they try to occupy their original positions. This restoring force per unit area taking place inside
the body is called the stress. As long as there is no permanent change in shape or volume of the
body, the restoring force is always equal to the applied force.
mathematically aFStress / where a is the cross sectional area of the body.
Strain
When an external force acts on a body, it displaces various particles and the body is said to be
under strain. Usually defined as the ration of change in length, volume or shape to the original
length, volume or shape.
Hooke’s Law
The relationship between stress and strain.
)(constEstrain
stress
E is the coefficient of elasticity or modulus of elasticity (value depends on the nature of the
material.
Graphical representation fo this relationship is shown below.
From the graph, hooke’s is only valid in the region below the elastic limit, beyond which the
body has un-proportional variation in strain and stress (the change in stress leads to a rapid
change in strain).
Young’s Modulus
This is the ratio of stress to longitudinal strain within the elastic limits.
Consider a wire of length L and let it change by l under an applied force F acting on a cross
sectional area a. From this, longitudinal strain is l/L and stress is F/a.
Therefore Young’s modulus of Elasticity will be
stress
strain
Plastic
range
Elastic
limit

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
44
al
FL
Ll
aF
strain
stressY
/
/[N/m
2]
Bulk Modulus
This is the ratio between stress and volumetric strain. If a force is applied normally over a surface
of a body and it changes only in volume takes place, then the strain caused here is volumetric
strain. It is measured by change in volume per unit volume (v/V).
i.e av
FV
Vv
aF
/
/
5.5 Viscosity
Viscosity is a property by which a liquid opposes relative motion between its different layers.
Liquids like kerosene, alcohol, water, etc flow easily while others like tar, glycerin, etc, flow with
difficulty and are called viscous.
Coefficient of viscosity
Consider a layer AB of a liquid moving with velocity v w.r.t. a parallel layer CD which is at a
distance r from it. Consider also that the force required to produce the motion be F acting on an
area A and this force is acting along the direction AB (i.e in the direction of motion). An equal
force will act in the opposite direction due to viscosity and it will depend on the following:
i. F α –v
ii. F α A
iii. F α 1/r
Combining the three we have
r
vAF
Where η is the coefficient of viscosity and it depends on the nature of the liquid.
If the two layers are very close to each other, then
dr
dvAF
Where dv/dr is the velocity gradient. If A = 1cm2 and dv/dr = 1 then
F = η which gives the definition of coefficient of viscosity as the tangential force per unit area
required to maintain a unit velocity gradient.
If F = 1 then η = 1 and the unit is Poise.
Stokes Law
If a body falls through a fluid (liquid or gas) then it carries along with it a layer of the fluid in
contact and hence it will tend to produce some relative motion between the layers of the fluid.
This relative motion is opposed by forces of viscosity and the opposing force increases as the
velocity of the body increases. If the body if small enough, then the opposing force becomes
equal to the driving force that produces the motion. At that instance then the body moves with
constant velocity known as terminal velocity.
Consider a small sphere falling through a viscous medium, then the opposing force is directly
proportional to the velocity of the sphere and depends on
i. coefficient of viscosity of the medium
ii. radius of the sphere
iii. density of the medium

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
45
combining the three we have
rvkF ..
Where k is a constant (calculated and found to be 6π).
II

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
46
SOUND AND VIBRATIONS
Chapter 5: Wave Motion
Introduction
Wave motion is a form of disturbance that travels through the medium due to the repeated
periodic motion of particles of the medium about their mean positions. This disturbance is
transferred from one particle to the next, e.g water waves, sound. This also involves the transfer
of energy from one point to the other.
Characteristics of a wave
1. It’s a disturbance produced in the medium by repeated periodic motion of the particles of
the medium.
2. The wave travels forward while particles of the medium vibrate about their mean
positions
3. there is a regular phase change between various particles of the medium
4. Velocity of the wave is different from the velocity with which the particles of the
medium are vibrating about their mean positions.
Types of wave motion
1. Transverse wave: particles of the medium vibrate about their mean positions in the
direction perpendicular to the direction of propagation, e.g. light waves, water waves
etc
2. Longitudinal: particles of the medium vibrate about their mean position in the
direction of the wave, e.g sound wave
General wave equation
Since wave motion involves vibration of particles about the mean position, they are also a SHM
type of wave motion. The displacement of a particle P in SHM is given by
tay sin
Suppose another particle Q is at a distance x from P and the wave is traveling with velocity v in
positive x direction (Fig below).
Then the displacement of the particle Q will be given by
)sin( tay (*)
Where φ is the phase difference between the particles P and Q. The phase difference
corresponding to the path difference (wavelength, λ) is 2π, which leads to the relation
x
2
Where x is the path difference between P & Q. Hence the phase difference φ between P and Q is
x2 and
Angular frequency ω is
P
Q
x
a

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
47
v
Tf
222
Hence equation (*) becomes
)22
sin(
xt
vay (**)
Or
(***)
This is the general wave equation for a traveling wave in positive x direction with velocity v.
Differential form of general wave equation The general wave equation can also be represented in differential form. Differentiating the
equation (***) w.r.t. t gives
)(2
cos2
xvtav
dt
dy
(a)
Further differentiation of equation (a) w.r.t. t gives
)(2
sin2
2
2
2
xvtav
dt
yd
(b)
To get the compression of the wave (in x space), we differentiate equation (**) w.r.t. x, i.e.
)(2
cos2
xvta
dx
dy
(c)
Further differentiation of equation (c) w.r.t. x will give the compression in terms of distance (in x-
direction), i.e
)(2
sin2
2
2
2
xvta
dx
yd
(d)
Comparing equations (a) and (c) we see that
dt
dy
vdx
dy 1
And from (b) and (d) we have
)(2
sin xvtay
2
2
22
2 1
dt
yd
vdx
yd

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
48
Which represents the differential form of a wave equation.
Particle velocity of a wave If the velocity of a particle is denoted by u then
)(2
cos2
xvtav
dt
dyu
And va
u
2max , which implies that
Maximum particle velocity is 2πa/λ times the wave velocity (v).
Likewise maximum particle acceleration is given by
av
f
2
max
2
(Show this)
Distribution of velocity & Pressure in a wave
If a wave is progressive (i.e, new waves are continuously formed) then there is a continuous
transfer of energy in the direction of propagation of the wave.
Remember particle velocity is given by
)(2
cos2
xvtav
dt
dyu
The strain in the medium is given by dy/dx, i.e, if it is positive, it represents a region of
rarefaction and when negative, represents region of compression. For such a medium, the
modulus of elasticity is given by
)/( dxdy
dP
strainvolume
pressureinchangeK
And
dx
dyKdP .
Implying that dP is positive in regions of compression and –ve in rarefaction region
y
T
T
T
u
dP
t
Po
C R C
2πav/λ

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
49
Interference
When two sound waves are moving along a straight line in a medium, then every particle of the
medium is simultaneously acted upon by both of the waves. If the two waves arrive at a point in
phase (two crests or two troughs) superimpose and the resultant amplitude is equal to the sum of
the respective waves (this is the principle of superposition). If the waves arrive at a point when
they are completely out of phase (a crest of one falls over the trough of another, then the resultant
amplitude is equal to the difference of the individual amplitudes. This implies that at points where
the two waves meet in phase will give maximum amplitude (hence maximum sound intensity)
while where they meet out of phase gives minimum amplitude (minimum sound intensity). The
phenomenon described above is called interference.
Fig. (a) constructive and (b) destructive interference
Let two waves having amplitudes a1 and a2 be represented by equations
)(2
sin
)(2
sin
22
11
xvtay
and
xvtay
Where φ is the phase difference between the two waves after some time. The resultant
displacement will be
sin)(2
coscos)(2
sin
sin)(2
coscos)(2
sin)(2
sin
)(2
sin)(2
sin
221
221
2121
axvtaaxvt
xvtaxvtaxvta
xvtaxvtayyY
(using the trig identity Sin (A + B) = Sin A cos B + sin B cos A)
Letting a1 + a2cos φ = A cos θ, a2sin φ = A sin θ and using trigonometric identities leads to
combined
Wave 1
Wave 1
(a) (b)

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
50
)(2
sin
)(2
cossin)(2
sincos
xvtAY
xvtAxvtAY
This shows that the resultant wave has the same frequency but a different amplitude and phase
from the component wave trains.
Special cases:
1. when φ = 0, A = a1 + a2 and hence tan θ = 0 showing that the resultant is in phase
with the component
2. when φ = 180o, A = a1 – a2
From 1 and 2 above, it implies that when the phase difference between two waves is zero the
two waves reinforce each other. This also implies that the resultant has the same period and
its amplitude is the sum of the amplitudes of the component waves. However, if the two
waves have a phase difference of 180o, they destroy each other and the resultant amplitude is
the difference between the amplitudes of the component waves.
Conditions for interference of sound waves
1. the two wave trains must move in the same direction.
2. The two sources must give waves of same frequency and amplitude so that the positions
of maxima and minima are distinct
3. the two sources must be in phase, i.e must be coherent source
Beats
When two waves of nearly same frequency travel along a straight line in the same direction, the
resultant displacement at a point varies in amplitude alternately. At any position, the amplitude of
the wave pulsates. This will be perceived as alternately soft and loud sound.
The frequency at which the amplitude pulsates is called the beat frequency and it is
mathematically given by
12 fffbeat
The phenomena of beats is used in tuning of musical instruments, e.g to bring two flutes in tune,
musicians listen to beats and through trial and error, adjust one of the flutes to reduce the beat
frequency.
Standing waves
If two waves of the same amplitude traveling in the opposite directions superpose each other, they
generate a standing wave. (Fig below)
These two waves are alternately in and out of phase and at regions of the waves being in phase,
the resultant is the sum of the waves with twice their amplitudes (anti-node points). The two
waves cancel out at points where they are out of phase forming nodes.

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
51
The frequency of the standing wave is the same as the frequency of the underlying traveling
waves. Examples are waves in a string that has fixed points at the ends. For the case as for the
string with fixed ends, the condition for standing wave is that the wave must be zero at the end
points all the times. Suppose the string has a length L, then the lowest possible standing wave to
form is half wavelength (fundamental mode), the nest possible one is one complete wavelength
(known as the first overtone) and so on. This implies that for the modes (where waves form nodes
at the ends) some number of half wavelength exactly fits the length of the string. This can be
expressed mathematically as
n
Ln
2
Where λ is the wavelength, n is the number multiple and L is the length.
The frequency of the standing wave is also found generally as
L
nvfn
2
With f1 known as the fundamental frequency and the following ones as overtones.
Doppler Effect
This is the apparent change in frequency due to relative motion between the source and the
observer. Give examples. This originates from the reasoning that the standard speed of sound in
air found to be 331m/s is measured in a reference from at rest in air. However if the frame of
reference is moving in air, the speed will be larger or smaller, depending on the direction of
motion of the reference frame. That is, an observer will detect a higher frequency when
approaching the source and a lower one when receding. There are several cases where this occurs
and we will explore each at a time.
Case 1: observer moving towards stationary source
Let the frequency of a source be f and the observer moving at velocity vo and the velocity of
sound be v. The observer encounters more wave fronts per second than when stationary.
In general the relationship between frequency, speed and wavelength of a wave is given by
vf
In the frame of reference of the observer, the apparent frequency will be
'' vf
Where v’ is the velocity of the sound received by the observer. The wavelengths in the two equations
above are same since the distance between crests does not depend on the frame of reference. Hence
v
v
f
f ''
The speed of sound will then be v’ = v + vo and therefore the apparent frequency heard by the observer
will be
v
vvff o'
In general
v
vff o1'
Where + is for approaching observer and negative for receding observer.

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
52
Case 2: Source moving and observer stationary
Apparent frequency is given by
vvff
s1
1'
Where + is for approaching source and – for receding source.
Other cases are governed in the following general equation
s
o
vv
vvff '
vo is velocity of observer
vs is velocity of source
v is velocity of sound
with the following conditions applying on the above general equation.
1. if observer moving towards stationary source, add vo to v
2. if observer is moving away from source, subtract vo from v
3. if source is moving towards the observer, subtract vs from v
4. if source is moving away from observer, add vs to v
Suppose both are moving in either direction, what would be the relationship?

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
53
III
THERMAL PHYSICS
Chapter 7: Heat
Internal Energy and Temperature
Temperature
Temperature is commonly associated with how hot or cold an object feels when we touch it.
Understanding the concept of temperature requires the understanding of thermal contact and
thermal equilibrium. Two objects are in thermal contact if energy can be exchanged between
them. Two objects are in thermal equilibrium if they are in thermal contact and there is no net
exchange of energy. The exchange of energy between two objects because of differences in their
temperatures is called heat Using these ideas, a formal definition of temperature can be
developed. Temperature can therefore be defined as the property that determines whether or not
an object is in thermal equilibrium with another, i.e., Two objects in thermal equilibrium with
each other are at the same temperature.
Internal energy (U) is the energy associated with the microscopic components of a system (the
atoms and molecules of the system). The internal energy includes kinetic and potential energy
associated with the random translational, rotational, and vibrational motion of the particles that
make up the system, and any potential energy bonding the particles together. The higher the
temperature of the gas, the greater the kinetic energy of the atoms and the greater the internal
energy of the gas.
Heat
This is the transfer of energy between a system and its environment due to a temperature
difference between them. The symbol Q is used to represent the amount of energy transferred by
heat between a system and its environment. Heat is the transfer of thermal energy, just as work is
the transfer of mechanical energy. The unit of heat is the calorie, defined as the energy
necessary to raise the temperature of 1 g of water from 14.5° to 15.5°C.
SPECIFIC HEAT
The historical definition of the calorie is the amount of energy necessary to raise the temperature
of one gram of a specific substance—water—by one degree.
That amount is 4.186 J. Raising the temperature of one kilogram of water by 1° requires 4 186 J
of energy. The amount of energy required to raise the temperature of one kilogram of an arbitrary
substance by 1° varies with the substance. For example, the energy required to raise the
temperature of one kilogram of copper by 1.0°C is 387 J. Every substance requires a unique
amount of energy per unit mass to change the temperature of that substance by 1.0°C.
If a quantity of energy Q is transferred to a substance of mass m, changing its temperature by _T _
Tf _ Ti , the specific heat c of the substance is defined by
SI unit: Joule per kilogram-degree Celsius ( J/kg _°C)
Table 11.1 lists specific heats for several substances. From the definition of the calorie, the
specific heat of water is 4 186 J/kg _ °C. From the definition of specific heat, we can express the
energy Q needed to raise the temperature of a system of mass m by _T as
The energy required to raise the temperature of 0.500 kg of water by 3.00°C, for example, is Q _
(0.500 kg)(4 186 J/kg _ °C)(3.00°C) _ 6.28 _ 103 J. Note that when the temperature increases, _T
and Q are positive, corresponding to energy flowing into the system. When the temperature
decreases, _T and Q are negative, and energy flows out of the system.

Dr. Z. Birech ENGINEERING PHYSICS 1A (2014)
Z. Birech ([email protected]) Department of Physics, University of Nairobi
54
Table 11.1 shows that water has the highest specific heat relative to most other common
substances. This high specific heat is responsible for the moderate temperatures found in regions
near large bodies of water. As the temperature of a body of water decreases during winter, the
water transfers energy to the air, which carries the energy landward when prevailing winds are
toward the land. Off the western coast of the United States, the energy liberated by the Pacific
Ocean is carried to the east, keeping coastal areas much warmer than they would otherwise be.
Winters are generally colder in the eastern coastal states, because the prevailing winds tend to
carry the energy away from land.
The fact that the specific heat of water is higher than the specific heat of sand is responsible for
the pattern of airflow at a beach. During the day, the Sun adds roughly equal amounts of energy
to the beach and the water, but the lower specific heat of sand causes the beach to reach a higher
temperature than the water. As a result, the air above the land reaches a higher temperature than
the air above the water. The denser cold air pushes the less dense hot air upward (due to
Archimedes’s principle), resulting in a breeze from ocean to land during the day. Because the hot
air gradually cools as it rises, it subsequently sinks, setting up the circulation pattern shown in
Figure 11.2.
A similar effect produces rising layers of air called thermals that can help eagles soar higher and
hang gliders stay in flight longer. A thermal is created when a portion of the Earth reaches a
higher temperature than neighboring regions. This often happens to plowed fields, which are
warmed by the Sun to higher temperatures
LATENT HEAT AND PHASE CHANGE
A substance usually undergoes a change in temperature when energy is transferred between the
substance and its environment. In some cases, however, the transfer of energy doesn’t result in a
change in temperature. This can occur when the physical characteristics of the substance change
from one form to another, commonly referred to as a phase change. Some common phase
changes are solid to liquid (melting), liquid to gas (boiling), and a change in the crystalline
structure of a solid. Any such phase change involves a change in the internal energy, but no
change in the temperature.
The energy Q needed to change the phase of a given pure substance is
Q _ _mL [11.6]
where L, called the latent heat of the substance, depends on the nature of the phase change as
well as on the substance. The unit of latent heat is the joule per kilogram ( J/kg). The word latent
means “lying hidden within a person or thing.” The positive sign in Equation 11.6 is chosen when
energy is absorbed by a substance, as when ice is melting. The negative sign is chosen when
energy is removed from a substance, as when steam condenses to water.
The latent heat of fusion Lf is used when a phase change occurs during melting or freezing,
while the latent heat of vaporization Lv is used when a phase change occurs during boiling or
condensing.1 For example, at atmospheric pressure the





























