Embed Size (px)
Citation preview

1348 IEEE JOURNAL ON SELECTED AREAS IN COMMUNICATIONS, VOL. 34, NO. 5, MAY 2016
Dynamic Energy Managementfor Smart-Grid-Powered Coordinated
Multipoint SystemsXin Wang, Senior Member, IEEE, Yu Zhang, Student Member, IEEE, Tianyi Chen, Student Member, IEEE,
and Georgios B. Giannakis, Fellow, IEEE
Abstract—Due to increasing threats of global warming andclimate change concerns, green wireless communications haverecently drawn intense attention toward reducing carbon emis-sions. Aligned with this goal, the present paper deals with dynamicenergy management for smart-grid powered coordinated multi-point (CoMP) transmissions. To address the intrinsic variabilityof renewable energy sources, a novel energy transaction mech-anism is introduced for grid-connected base stations that arealso equipped with an energy storage unit. Aiming to mini-mize the expected energy transaction cost while guaranteeingthe worst-case users’ quality of service, an infinite-horizon opti-mization problem is formulated to obtain the optimal downlinktransmit beamformers that are robust to channel uncertainties.Capitalizing on the virtual-queue-based relaxation technique andthe stochastic dual-subgradient method, an efficient online algo-rithm is developed yielding a feasible and asymptotically optimalsolution. Numerical tests with synthetic and real data corroboratethe analytical performance claims and highlight the merits of thenovel approach.
Index Terms—CoMP systems, downlink beamforming, smartgrids, high-penetration renewables, stochastic optimization,Lyapunov optimization.
I. INTRODUCTION
I N future 5G wireless standards, current cellular systems areenvisioned to evolve into the so-termed heterogeneous net-
works (HetNets), which consist of distributed macro/micro/picobase stations (BSs) to cover overlapping areas of differentsizes.L To deal with the severe inter-cell interference introduced
Manuscript received March 17, 2015; revised June 29, 2015; acceptedDecember 4, 2015. Date of publication January 21, 2016; date of currentversion May 19, 2016. This work was supported by the China RecruitmentProgram of Global Young Experts, the Program for New Century ExcellentTalents in University, the Innovation Program of Shanghai Municipal EducationCommission, the National Science and Technology Major Project of theMinistry of Science and Technology of China under Grant 2012ZX03001013;and by the U.S. NSF under Grant 1509040, Grant 1508993, Grant 1442686,Grant 1423316, and Grant 1343248.
X. Wang is with the Key Laboratory for Information Science ofElectromagnetic Waves (MoE), Department of Communication Scienceand Engineering, Fudan University, Shanghai, China, and also withthe Department of Computer and Electrical Engineering and ComputerScience, Florida Atlantic University, Boca Raton, FL 33431 USA (e-mail:[email protected]).
Y. Zhang, T. Chen, and G. B. Giannakis are with the Department ofElectrical and Computer Engineering, Digital Technology Center, Universityof Minnesota, Minneapolis, MN 55455 USA (e-mail: [email protected]; [email protected]; [email protected]).
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/JSAC.2016.2520220
by close proximity of many such HetNet BSs, coordinatedmulti-point (CoMP) processing has been proposed as a promis-ing technique for efficient interference management [1]. InCoMP systems, BSs team up (possibly adaptively) to form clus-ters, where per-cluster BSs perform coordinated beamformingto serve the cell end users [2]–[4].
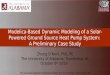
The increasing demand for energy-efficient transmissions isone of the main driving factors for CoMP systems. Due to thegrowing number of BSs in HetNets, the electricity bill becomesa major part of the operational expenditure of a cellular oper-ator. Meanwhile, cellular networks contribute a considerableportion of the global carbon footprint [7]. The economic andecological concerns advocate a green communication solution,where cellular BSs are powered by the electricity grid [2]–[4], [7]–[9]. However, the current grid infrastructure is on theverge of a major paradigm shift, migrating from the aging gridto a “smart” one. The smart grid has many new features andadvanced capabilities including e.g., high penetration of dis-tributed renewable energy sources (RES), and dynamic pricingbased demand-side management (DSM) [10]–[13]. Full bene-fits of the RES (e.g., wind and solar energy) can only be har-nessed by properly mitigating its intrinsically stochastic nature,which however is a very challenging task. For instance, Fig. 1exhibits the real data of hourly wind and solar power generationthat depend on various meteorological factors including e.g.,wind speed and direction, air density and pressure, sunlight, aswell as temperature. In addition, annual, seasonal, diurnal andhourly patterns may change dramatically across regions.
A few recent works have considered the smart-grid pow-ered CoMP transmissions [14]–[17]. A simplified smart gridlevel game was formulated in [14] for dynamic pricing; while[15] and [16] assumed that the energy harvested from RES isaccurately available a priori through e.g., forecasting, whichcannot be performed at the BSs. For a single BS supportedby a combination of a renewable source and a storage unit, anadaptive energy management problem was cast as a stochas-tic program, and was further approximated with finite discretescenarios, in [17]. The case of multiple BSs with transmitbeamforming designs has not been considered therein. Buildingon realistic models, our recent work [18] addressed robustenergy management and transmit-beamforming designs thatminimize the worst-case energy transaction cost subject tothe worst-case user quality-of-service (QoS) guarantees forthe CoMP downlink with RES and DSM. Leveraging novel
0733-8716 © 2016 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission.See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.

WANG et al.: DYNAMIC ENERGY MANAGEMENT FOR SMART-GRID-POWERED COORDINATED MULTIPOINT SYSTEMS 1349
Fig. 1. Hourly wind power generation of a farm near the city of Boulder,Colorado during Jan. 01–03, 2006 [5]; and solar PV generation of the CaliforniaISO during Feb. 26–28, 2015 [6].
optimization tools, the resultant problem became a convex pro-gram. A Lagrange dual based subgradient solver was thenproposed to find the optimal energy-management strategy andtransmit-beamforming vectors.
Assuming that the generated random RES lies in a certainknown region, [18] dealt with offline, robust, ahead-of-timeresource management over a given finite horizon. However,the computational complexity of the algorithm proposed by[18] becomes prohibitively high as the scheduling time horizongrows large. In the present paper, we pursue an online controlapproach, which dynamically makes instantaneous decisionswithout prior knowledge of the probability density function(pdf) of the underlying (generally correlated) random pro-cesses. The resource allocation task is formulated as an infinitetime horizon problem with the goal of minimizing the time-average energy transaction cost. To obtain low-complexityoperating points, we first adopt a virtual-queue based relaxationtechnique [19], [20], to decouple the decision variables acrosstime. The resulting transaction cost minimization problemis then convexified using semidefinite relaxation to facilitatethe development of an efficient stochastic solver. Leveragingthe stochastic dual-subgradient method, we develop a virtual-queue based online control algorithm. Relying on the so-calledLyapunov optimization technique [21], and the revealed char-acteristics of the optimal schedules, we formally establish thatthe proposed algorithm yields a feasible and asymptoticallyoptimal resource management strategy for the original problem.
The rest of the paper is organized as follows. The systemmodels are described in Section II. The proposed dynamicresource management scheme is developed in Section III.Analysis of the guaranteed performance is the subject ofSection IV. Numerical tests are presented in Section V, followedby concluding remarks in Section VI.Notation. Boldface lower (upper) case letters represent vectors(matrices); CN×M , RN×M , and CN stand for spaces of N × Mcomplex, real matrices, and N × 1 complex vectors, respec-tively. [a]+ := max{a, 0}, and ‖a‖ denotes the �2-norm of a.(·)′ denotes transpose, and (·)H conjugate transpose; tr(A) and
rank(A) the trace and rank operators for matrix A, respectively;diag(a1, . . . , aM ) denotes a diagonal matrix with diagonal ele-ments a1, . . . , aM ; | · | the magnitude of a complex scalar;A � 0 signifies that A is positive semi-definite; and E denotesthe expectation.
II. SYSTEM MODELS
With reference to Fig. 2, consider a cluster-based CoMPdownlink system, where a set of I := {1, . . . , I } BSs (e.g.,macro/micro/pico BSs) serves a set of K := {1, . . . , K } mobileend users. Each BS is equipped with M transmit antennas,while each user has a single receive antenna. Assume that BSscan harvest RES using wind turbines and solar panels, to sup-port their transmission services. Furthermore, each BS can alsobuy energy from or sell energy to the main grid at dynam-ically changing market prices via a two-way energy tradingmechanism. As energy consumption of future communicationsystems becomes a major concern, uninterrupted power supplytype storage units can be installed at BSs not only to preventpower outage, but also provide opportunities to optimize theBS electricity bills. Specifically, in order to take advantage ofenergy price fluctuations, storage-enabled BSs do not have toconsume or sell all their harvested energy on the spot, but cansave it for later use.
Per CoMP cluster, all BSs are connected to a central con-troller through a low-latency backhaul network [3]. This con-troller collects not only the communication data from each BS,but also the energy trading prices via locally installed smartmeters, and the grid-deployed communication/control links.
Suppose the slot-based transmissions experience quasi-staticdownlink channels, which are allowed to vary across slotsbut remain invariant within each slot. This is a legitimateassumption when the slot length is selected smaller than thechannel coherence time. For convenience, the slot duration isalso normalized to unity, so the terms “energy” and “power”will thus be interchangeably used throughout the paper.
A. CoMP Transmissions
Consider a scheduling horizon indexed by the set T :={0, . . . , T − 1}. Per slot t , let ht
ik ∈ CM denote the vector chan-nel from BS i to user k, for all i ∈ I and k ∈ K. Let ht
k :=[ht
1k′, . . . ,ht
I k′]′ collect the channels from all BSs to user k.
With linear transmit beamformers across all BSs, the vector sig-nal transmitted to user k is qt
k = wtkst
k , for all k ∈ K, where stk
denotes the information-bearing symbol with unit energy, andwt
k ∈ CM I represents the beamforming vector across the BSslinked with user k. Thus, the received signal at user k in slot t is
ytk = ht
kH qt
k +∑l �=k
htk
H qtl + nt
k (1)
where htk
H qtk is the desired signal of user k;
∑l �=k ht
kH qt
l cap-tures the inter-user interference in the same cluster; and nt
kmodels the additive noise, as well as the possible downlinkinterference from other BSs outside this cluster. For simplicity,

1350 IEEE JOURNAL ON SELECTED AREAS IN COMMUNICATIONS, VOL. 34, NO. 5, MAY 2016
Fig. 2. A smart grid powered CoMP system. Two BSs with local renewable energy harvesting and storage devices implement two-way energy trading with themain grid.
ntk is assumed to be a circularly symmetric complex Gaussian
(CSCG) random variable with zero mean and variance σ 2k .
The signal-to-interference-plus-noise-ratio (SINR) of user kcan be written as
SINRk({wtk}) = |ht
kH wt
k |2∑l �=k(|ht
kH wt
l |2)+ σ 2k
. (2)
The transmit power of BS i is given by
Ptx,i =
∑k∈K
wtk
H Bi wtk (3)
where the M I × M I matrix
Bi := diag
⎛⎜⎝0, . . . , 0︸ ︷︷ ︸
(i−1)M
, 1, . . . , 1︸ ︷︷ ︸M
, 0, . . . , 0︸ ︷︷ ︸(I−i)M
⎞⎟⎠
selects the corresponding rows out of {wtk}k∈K to form the i-th
BS’s transmit-beamforming vector.The channel state information ht
k is always imperfectlyknown a priori in practice. Relying on past channel mea-surements and/or reliable channel predictions, we postulate anadditive error model ht
k = htk + δt
k , where htk is the estimated
channel known at the BSs. The uncertainty of this estimate isbounded by a spherical region [22]
Htk :=
{ht
k + δtk
∣∣ ∥∥δtk
∥∥ ≤ εtk
}, ∀k, t (4)
where εtk > 0 specifies the radius of Ht
k . The worst-case SINRof user k can be expressed as [cf. (2)]
SINRk({wtk}) := min
htk∈Ht
k
|htk
H wtk |2∑
l �=k(|htk
H wtl |2)+ σ 2
k
. (5)
With γk denoting user k’s target SINR, QoS per end user can beguaranteed by the constraint
SINRk({wtk}) ≥ γk, ∀k. (6)
B. Smart Grid Operations
Featuring smart grid operations, each BS can exploit RESwith harvesting facilities, and store the energy for future useusing onsite storage units. Let et := [Et
1, . . . , EtI ]′ collect the
harvested renewables in slot t across all BSs. For simplicity,we assume that et evolves as an independent and identicallydistributed (i.i.d.) random process.
Let C0i denote the initial amount of stored energy, and Ct
ithe state of charge (SoC) of BS i at the beginning of slot t .Each storage unit (e.g., battery) has a finite capacity Cmax
i . Aminimum level Cmin
i is also required at any time for the sakeof the battery health.1 With Pt
b,i denoting the battery charging(Pt
b,i > 0) or discharging (Ptb,i < 0) amount at slot t , the battery
dynamics are described by the recursion
Ct+1i = Ct
i + Ptb,i , ∀i, t. (7)
Due to physical constraints, the amount of power (dis-)chargedis bounded by
Pminb,i ≤ Pt
b,i ≤ Pmaxb,i (8)
where Pminb,i < 0, and Pmax
b,i > 0.Per BS i , the total energy consumption Pt
g,i consists of thebeamformers’ transmitting power Pt
x,i , and a constant power
1Batteries become unreliable with high depth-of-discharge (DoD), which isthe percentage of maximum charge removed during a discharge cycle. HighDoD can be avoided by maintaining a minimum level Cmin
i . Such a level couldbe also required to support the BS operation in the event of a grid outage. Hence,we have Cmin
i ≤ Cti ≤ Cmax
i , for all i ∈ I and t ∈ T.

WANG et al.: DYNAMIC ENERGY MANAGEMENT FOR SMART-GRID-POWERED COORDINATED MULTIPOINT SYSTEMS 1351
Pc,i > 0 consumed by other components such as air condition-ing, data processor, and circuits [9], [16]. Therefore, it holdsthat
Ptg,i = Pc,i + Pt
x,i/ξ = Pc,i +∑k∈K
wtk
H Bi wtk/ξ
where ξ > 0 denotes the power amplifier efficiency, which canbe set to ξ = 1 without loss of generality. The total consump-tion Pt
g,i is bounded by Pmaxg,i .
The main grid can supply the needed Ptg,i if the harvested
renewables are insufficient. In order to reduce operational costs,each BS can also sell its surplus energy (whenever the renew-ables are abundant) back to the grid via the two-way tradingmechanism. To this end, it is clear that the shortage energy forBS i that needs to be purchased from the grid is [Pt
g,i − Eti +
Ptb,i ]
+, while the surplus energy is [Eti − Pt
g,i − Ptb,i ]
+.With αt and β t denoting the buying and selling prices,
respectively, the condition αt ≥ β t is imposed to avoid mean-ingless buy-and-sell activities. Per slot t , the transaction cost ofBS i is therefore given by
G(Ptg,i , Pt
b,i ) := αt [Ptg,i − Et
i + Ptb,i ]
+
− β t [Eti − Pt
g,i − Ptb,i ]
+. (9)
Note that at any time slot each BS can either buy electricity atprice αt , or sell surplus to the grid at the price β t .
To simplify performance analysis, suppose that the prices{αt , β t } are i.i.d. across time. However, both the harvestedrenewable energy {et } and the prices {αt , β t } can be non-i.i.d.,and even negatively correlated with each other in practice [23].For such a case, it is worth stressing that our proposed algo-rithm in the sequel can be applied without any modification.Yet, performance guarantees in the non-i.i.d. case must beobtained by utilizing the more sophisticated delayed Lyapunovdrift techniques along the lines of e.g. [21].
III. DYNAMIC MANAGEMENT ALGORITHM
Based on the models of Section I, we consider the opti-mal energy management for transmit beamforming in a CoMPcluster. Over the scheduling horizon T, the central controllerof the CoMP cluster seeks an optimal schedule for coopera-tive transmit beamforming vectors {wt
k}k,t and battery chargingenergy {Pt
b,i }i,t , in order to minimize the total network cost∑t∈T
∑i∈I G(Pt
g,i , Ptb,i ), while satisfying the user QoS guar-
antees SINRk({wtk}) ≥ γk , ∀k, t . For notational brevity, we
introduce the auxiliary variables Pti := Pt
g,i + Ptb,i , and formu-
late the problem of interest as
minimize{wt
k ,Ptb,i ,C
ti ,P
ti }
limT →∞
1
T
T −1∑t=0
∑i∈I
G(Pti ) (10a)
s. t.
Pti = Pc,i +
∑k∈K
wtk
H Bi wtk + Pt
b,i , ∀i, t (10b)
0 ≤ Pc,i +∑k∈K
wtk
H Bi wtk ≤ Pmax
g,i , ∀i, t (10c)
Ct+1i = Ct
i + Ptb,i , ∀i, t (10d)
Cmini ≤ Ct
i ≤ Cmaxi , ∀i, t (10e)
Pminb,i ≤ Pt
b,i ≤ Pmaxb,i , ∀i, t (10f)
SINRk({wtk}) ≥ γk, ∀k, t. (10g)
A. Reformulation and Relaxation
With ψ t := (αt − β t )/2 and φt := (αt + β t )/2, it followsreadily from (9) that:
G(Pti ) = ψ t |Pt
i − Eti | + φt (Pt
i − Eti ).
Since αt > β t > 0, we have φt > ψ t > 0. It is then clear thatG(Pt
i ) is a convex function of Pti .
Except for (10b), (10c), and (10g), all other constraints areconvex per slot t . We next rely on the popular semidefinite pro-gram (SDP) relaxation technique to convexify these constraints.Using the definitions of Ht
k and SINRk({wtk}), the constraint
(10g) can be rewritten as
Fk(δtk) ≥ 0 for all δt
k such that δtk
Hδt
k ≤ (εtk)
2 (11)
where
Fk(δtk)
:=(
htk + δt
k
)H
⎛⎝wt
kwtk
H
γ tk
−∑l �=k
wtl w
tl
H
⎞⎠(ht
k + δtk
)− σ 2
k .
Using (11) and upon applying the well-known S-procedurein robust optimization [24], the original problem (10) can bereformulated as an SDP with rank constraints.
Specifically, with Xtk := wt
kwtk
H ∈ CM I×M I , it clearly holdsthat Xt
k � 0 and rank(Xtk) = 1. Using the S-procedure, (11) can
be transformed as
�tk :=
(Yt
k + τ tk I Yt
k htk
ht Hk Yt H
k ht Hk Yt
k htk − σ 2
k − τ tk (ε
tk)
2
)� 0 (12)
where τ tk ≥ 0 and Yt
k := 1γk
Xtk −∑
l �=k Xtl .
Introduce auxiliary variables τ tk and drop the rank constraints
rank(Xtk) = 1, ∀k, t ; further, remove the variables {Pt
b,i } bycombining constraints (10b) with (10d). We can then transform(10) to
G∗ := min{Xt
k ,τtk ,P
ti ,C
ti }
limT →∞
1
T
T −1∑t=0
∑i∈I
G(Pti ) (13a)
s. t. Cmini ≤ Ct
i ≤ Cmaxi , ∀i, t (13b)
Ct+1i = Ct
i + Pti − Pc,i −
∑k∈K
tr(Bi Xtk), ∀i, t (13c)
Pminb,i ≤ Pt
i − Pc,i −∑k∈K
tr(Bi Xtk) ≤ Pmax
b,i , ∀i, t (13d)
− Pc,i ≤∑k∈K
tr(Bi Xtk) ≤ Pmax
g,i − Pc,i , ∀i, t (13e)
�tk � 0, Xt
k � 0, τ tk ≥ 0, ∀k, t. (13f)

1352 IEEE JOURNAL ON SELECTED AREAS IN COMMUNICATIONS, VOL. 34, NO. 5, MAY 2016
The constraints (13a)–(13e) are all linear, and SINR constraints(10g) become a set of convex SDP constraints in (13f). Asthe objective function is already convex, the problem (13) isa convex problem. Note that a solution to (13) is a controlpolicy that determines the sequence of feasible control deci-sions {Xt
k, Pti ,Ct
i } to be used. Let G∗ denote the value of theobjective in (13) under an optimal control policy.
Although (13) becomes convex after judicious reformula-tion, it is still difficult to solve since we aim to minimize theaverage total cost over an infinite time horizon. In particular,the battery energy level relations in (13c) couple the optimiza-tion variables over the infinite time horizon. This renders theproblem intractable for traditional solvers such as dynamicprogramming.
By recognizing that (13c) can be viewed as an energyqueue recursion, we next apply the time decoupling tech-nique to turn (13) into a tractable form [19], [20]. Forthe queue of Ct
i , the arrival and departure are Pti and
Pc,i +∑k∈K tr(Bi Xt
k), respectively, per slot t . Over the infi-nite time horizon, the time-averaging rate of arrival anddeparture are given by limT →∞ 1
T
∑T −1t=0 Pt
i and Pc,i +limT →∞ 1
T
∑T −1t=0
∑k∈K tr(Bi Xt
k), respectively. Define the fol-lowing expected values:
E
[∑i∈I
G(Pti )
]:= lim
T →∞1
T
T −1∑t=0
∑i∈I
G(Pti ) (14)
E[Pt
i
]:= lim
T →∞1
T
T −1∑t=0
Pti (15)
E
[∑k∈K
tr(Bi Xtk)
]:= lim
T →∞1
T
T −1∑t=0
∑k∈K
tr(Bi Xtk) (16)
where the expectations are taken over all sources of ran-domness. These expectations exist due to the stationarity of{et , αt , β t }.
Now consider the following problem
G∗ := min{Pt
i ,�tk ,X
tk ,τ
tk }E
[∑i∈I
G(Pti )
](17a)
s. t. E[Pt
i
] = Pc,i + E
[∑k∈K
tr(Bi Xtk)
], ∀i (17b)
(13d) − (13f).
It can be shown that (17) is a relaxed version of (13).Specifically, any feasible solution of (13) also satisfies the con-straints in (17). To see this, consider any policy that satisfies(13b) and (13c). Then summing equations in (13c) over all t ∈T under such a policy yields: CT
i − C0i = ∑T −1
t=0 [Pti − Pc,i −∑
k∈K tr(Bi Xtk)]. Since both CT and C0 are bounded due to
(13b), dividing both sides by T and taking limits as T → ∞,yields E
[Pt
i
] = Pc,i + E[∑
k∈K tr(Bi Xtk)]. It is then clear that
any feasible policy for (13) is also feasible for (17). As a result,the optimal value of (17) cannot exceed that of (13); that is,G∗ ≤ G∗.
Note that the time coupling constraint (13c) has beenrelaxed in problem (17), which then becomes easier to solve.
Specifically, it can be shown that the optimal solution to (17)can be achieved by2 a stationary, randomized control policythat chooses control actions {Xt
k, Pti } every slot purely as a
function (possibly randomized) of the current {et , αt , β t } andindependent of the battery energy levels Ct
i . We next develop astochastic dual subgradient solver for (17), which under properinitialization can provide an asymptotically optimal solutionto (13).
B. Stochastic Dual Subgradient Approach
Let Ft denote the set of {Xtk, τ
tk , Pt
i } satisfying constraints(13d)–(13f) per t . Let λi , denote the Lagrange multipliers asso-ciated with the constraints (17b). With the convenient notationZt := {Xt
k, τtk , Pt
i }, Z := {Zt ,∀t}, and λ := {λi ,∀i}, the partialLagrangian function of (17) is
L(Z,λ) :=
E
[∑i
G(Pti )
]+∑
i
λi
(E[Pt
i
]−Pc,i − E
[∑k∈K
tr(Bi Xtk)
]).
(18)
while the Lagrange dual function is given by
D(λ) := min{Zt ∈Ft }t
L(Z,λ), (19)
and the dual problem of (17) is: maxλ D(λ).For the dual problem, we can resort to a standard subgradient
method to obtain the optimal λ∗. This amounts to running theiterations
λi ( j + 1) = λi ( j)+ μgλi ( j), i = 1, . . . , I (20)
where j is the iteration index and μ > 0 is an appropri-ate stepsize. The subgradient g( j) := [gλi ( j),∀i] can then beexpressed as
gλi ( j) = E[Pti ( j)] − Pc,i − E
[∑k∈Ktr(Bi Xt
k( j))]
(21)
where Xtk( j) and Pt
i ( j) are given by
{Xtk( j), Pt
i ( j)} ∈ arg min{Xt
k ,Pti }∈Ft
∑i∈I
[G(Pt
i )
+ λi ( j)
(Pt
i − Pc,i −∑k∈K
tr(Bi Xtk)
)]. (22)
Since Ft is a convex set while the objective is a convexfunction of {Xt
k, Pti }, the minimization problem in (22) is a con-
vex program that is efficiently solvable to obtain the optimal{Xt
k( j), Pti ( j)}.
When a constant stepsize μ is adopted, the subgradient itera-tions (20) are guaranteed to converge to a neighborhood of theoptimal λ∗ for the dual problem from any initial λ(0). The sizeof the neighborhood is proportional to the stepsize μ. In fact, ifwe adopt a sequence of non-summable diminishing stepsizes
2The proof follows from the framework in [21] and is omitted for brevity.

WANG et al.: DYNAMIC ENERGY MANAGEMENT FOR SMART-GRID-POWERED COORDINATED MULTIPOINT SYSTEMS 1353
Algorithm 1. Virtual-Queue based Online Control (VQOC)
1: Initialize with a proper Q0 = {Q0i ,∀i}
2: Repeat online t = 1, 2, . . .With Qt , {et , αt , β t } available per slot t , solve the problemin (22) with λi ≡ μQt
i , ∀i , to obtain {Pti (Q
t ),Xtk(Q
t )}, andthen perform the corresponding online beamforming andbattery-charging, power-buying/selling operations
3: Update the virtual queue Qt+1 via (24) for all i
satisfying lim j→∞ μ( j) = 0 and∑∞
j=0 μ( j) = ∞, then theiterations (20) converge to the exact λ∗ as j → ∞ [25]. Since(17) is convex, the duality gap is zero, and convergence to λ∗can also yield the optimal solution to the primal problem (17).
A challenge associated with the subgradient iterations (20)is computing E[Pt
i ( j)] and E[∑
k tr(Bi Xtk( j))] per iterate.
This amounts to performing high-dimensional integration overunknown (or known) joint distribution function; or approxi-mately, computing the corresponding time-averages over aninfinite time horizon. Such a requirement is impractical sincethe associated computational complexity could be prohibitivelyhigh. To bypass this impasse, we will rely on a stochasticsubgradient approach. Specifically, dropping E from (20), wepropose the following iteration
λt+1i = λt
i + μ[
Pti (λ
t )− Pc,i −∑
ktr(Bi Xt
k(λt ))]
(23)
where {λti }t indicate the stochastic estimates of those in (20),
and Pti (λ
t ), Xtk(λ
t ) are obtained by solving (22) with λi ( j)
replaced by λti , ∀i .
Note that t denotes both iteration and slot indices. Inother words, the update (23) is an online approximation algo-rithm based on the instantaneous decisions {Pt
i (λt ),Xt
k(λt )}
per slot t . This stochastic approach is made possible due tothe decoupling of optimization variables across time in (17).Convergence of online iterations (23) to the optimal λ∗ canbe established in different senses; see [21], [26]–[29]. Due tothe zero-duality gap, the companion {Pt
i (λt ),Xt
k(λt )} will also
converge to the optimal policy of (17).
C. Virtual-Queue based Control Algorithm
Based on the stochastic iterations (23), we next develop avirtual-queue based online control (VQOC) algorithm for (17).With Qt := {Qt
i := λti/μ, i = 1, . . . , I }, it is clear that
Qt+1i = Qt
i + Pti (Q
t )− Pc,i −∑
ktr(Bi Xt
k(Qt )) (24)
where Pti (Q
t ) := Pti (μQt ) = Pt
i (λt ), and Xt
k(Qt ) := Xt
k(λt ).
Note that Qti in (24) obeys the same dynamical equation as
the SoC in (13c); hence, it can be seen as a virtual energy queuefor the i-th BS. Unlike real queues, the value of Qt
i is allowedto be negative. Based on such virtual queues, we propose thefollowing VQOC algorithm at the central scheduler.
For Algorithm 1, the information of harvested energy {et } atthe BSs can be collected by each cluster’s central unit throughcellular backhaul links. The energy pricing information {αt , β t }
is available via smart meters installed at BSs, and the grid-deployed communication/control links connecting them. Thechannel estimates ht
k can be obtained by limited-feedback chan-nels specified in the current and future cellular standards. Ina nutshell, the communication overhead associated with theproposed algorithm is affordable in next-generation smart-gridpower CoMP systems. The computational complexity withthe proposed VQOC algorithm is also low. Specifically, theinterior-point method can be employed to solve the convexproblem (22) yielding {Pt
i (Qt ),Xt
k(Qt )} with a complexity
O((M I )3.5) per slot t [30]. Update of Qt+1 in (24) incurs onlylinear complexity O(M I ).
The VQOC algorithm is essentially the stochastic subgradi-ent solver (23). In the next section, we will rigorously establishthat the proposed algorithm can asymptotically yield an opti-mal solution of (17). Interestingly, by exploiting the connectionbetween Qt
i and Cti , we will also show that the VQOC approach
with proper initialization also yields a solution to (13), or, to theoriginal problem (10).
IV. PERFORMANCE GUARANTEES
To arrive at our main claim, we first establish the asymptoticoptimality of the proposed VQOC algorithm.
A. Asymptotic Optimality
Relying on the so-called Lyapunov optimization technique in[19]–[21], we can formally establish that:
Lemma 1: If {et , αt , β t } are i.i.d. over slots, then the time-averaging cost under the proposed VQOC algorithm satisfies
limT →∞
1
T
T −1∑t=0
E
[∑i
G(Pti (Q
t ))
]≤ G∗ + μM
where the constant M := 12
∑i (max{Pmax
b,i ,−Pminb,i })2, and G∗
is the optimal value of (13) under any feasible control algo-rithm, even if that relies on knowing future random realizations.
Proof: From the evolutions in (24), we have
(Qt+1i )2 = [Qt
i + Pti (Q
t )− Pc,i −∑
ktr(Bi Xt
k(Qt ))]2
= (Qti )
2 + 2Qti [Pt
i (Qt )− Pc,i −
∑ktr(Bi Xt
k(Qt ))]
+ [Pti (Q
t )− Pc,i −∑
ktr(Bi Xt
k(Qt ))]2
≤ (Qti )
2 + 2Qti [Pt
i (Qt )− Pc,i −
∑ktr(Bi Xt
k(Qt ))]
+ (max{Pmaxb,i ,−Pmin
b,i })2
where the last inequality holds due to (13d).Considering now the Lyapunov function V (Qt ) :=
12
∑i (Q
ti )
2, it readily follows that
�V (Qt ) := V (Qt+1)− V (Qt )
≤∑
i
{Qti [Pt
i (Qt )− Pc,i −
∑ktr(Bi Xt
k(Qt ))]} + M.
Taking expectations and adding 1μE[∑
i G(Pti (Q
t ))] to bothsides, we arrive at

1354 IEEE JOURNAL ON SELECTED AREAS IN COMMUNICATIONS, VOL. 34, NO. 5, MAY 2016
E[�V (Qt )] + 1
μE[∑
i
G(Pti (Q
t ))]
≤ M + 1
μ
(E[∑
i
G(Pti (Q
t ))] +∑
i
{μQt
i
(E[Pt
i (Qt )]
−Pc,i − E[∑
ktr(Bi Xt
k(Qt ))]
)})
= M + 1
μL(Z(μQt ), μQt )
= M + 1
μD(μQt )
≤ M + 1
μG∗
where we used the definition of L(Z,λ) in (18); Z(μQt )
denotes the optimal primal variable set given by (22) for λ =μQt (hence, L(Z(μQt ), μQt ) = D(μQt )); G∗ denotes theoptimal value for problem (17); and the last inequality is dueto the weak duality: D(λ) ≤ G∗, ∀λ.
Summing over all t , we then haveT −1∑t=0
E[�V (Qt )] + 1
μ
T −1∑t=0
E[∑
i
G(Pti (Q
t ))]
= E[V (QT )] − V (Q0)+ 1
μ
T −1∑t=0
E[∑
i
G(Pti (Q
t ))]
≤ T (M + 1
μG∗)
which leads to
1
T
T −1∑t=0
E[∑
i
G(Pti (Q
t ))] ≤ G∗ + μ
(M + V (Q0)
T
)
≤ G∗ + μ
(M + V (Q0)
T
).
The lemma follows by taking the limit T → ∞. �Lemma 1 asserts that the proposed VQOC algorithm con-
verges to a region with an optimality gap smaller than μM ,which vanishes as the stepsize μ → 0. The proof follows thelines of the Lyapunov technique in e.g., [21]. Yet, slightly dif-ferent from [21], here the Lagrange dual theory is utilized tosimplify the arguments.
B. Feasibility Guarantee
We have shown that the VQOC iteration can achieve a near-optimal objective value for (13). However, since the proposedalgorithm is based on a solver for the relaxed (17), it is notguaranteed that the resultant dynamic control policy is a feasi-ble one for (13). In the sequel, we will establish that the VQOCin fact can yield a feasible policy for (13) when it is properlyinitialized. To this end, we first show the following lemma.
Lemma 2: If α := max{αt ,∀t} and β := min{β t ,∀t}, thebattery (dis-)charging amounts Pt
b,i under the VQOC algo-
rithm obey: i) Ptb,i (Q
t ) = Pminb,i , if Qt
i >−βμ
; and ii) Ptb,i (Q
t ) =Pmax
b,i , if Qti <
−αμ
.
Proof: Since Ptb,i = Pt
i − Pc,i −∑k∈K tr(Bi Xt
k), perslot t we have
{Xtk(Q
t ), Ptb,i (Q
t )} ∈ arg min{Xt
k ,Ptb,i }∈Ft
∑i
[G(Pt
b,i + Pc,i
+∑k∈K
tr(Bi Xtk))+ μQt
i Ptb,i
].
Consider the following two cases [cf. (9)]i) If Pt
b,i (Qt )+ Pc,i +∑
k tr(Bi Xtk(Q
t )) ≥ Eti , then
G(Ptb,i (Q
t )+ Pc,i +∑k tr(Bi Xt
k(Qt ))) = αt
(Pt
b,i (Qt )+
Pc,i +∑k tr(Bi Xt
k(Qt ))− Et
i
). It is easy to see that we
must have
Ptb,i (Q
t ) ={
Pminb,i , if μQt
i + αt > 0
Pmaxb,i , if μQt
i + αt < 0.
ii) If Ptb,i (Q
t )+ Pc,i +∑k tr(Bi Xt
k(Qt )) < Et
i , then
G(Ptb,i (Q
t )+ Pc,i +∑k tr(Bi Xt
k(Qt ))) = β t
(Pt
b,i (Qt )+
Pc,i +∑k tr(Bi Xt
k(Qt ))− Et
i
); and we similarly
arrive at
Ptb,i (Q
t ) ={
Pminb,i , if μQt
i + β t > 0
Pmaxb,i , if μQt
i + β t < 0.
Combining cases i) and ii), we deduce that per slot t ,if μQt
i > max{−αt ,−β t } = −β t , then Ptb,i (Q
t ) = Pminb,i . This
implies that if Qti >
−βμ
, we must have Ptb,i (Q
t ) = Pminb,i .
Similarly, if μQti < min{−αt ,−β t } = −αt , then Pt
b,i (Qt ) =
Pmaxb,i , which is guaranteed whenever Qt
i <−αμ
. �Remark 1: Lemma 2 reveals partial characteristics of the
dynamic VQOC policy. Specifically, when the virtual energyqueue is large enough, the battery must be discharged asmuch as possible; i.e., Pt
b,i (Qt ) = Pmin
b,i . On the other hand,when the virtual queue is small (negative) enough, the batterymust be charged as much as possible; i.e., Pt
b,i (Qt ) = Pmax
b,i .Alternatively, such results can be justified by the economicinterpretation of the Lagrange multipliers [cf. (23) and (18)].Specifically, λt
i can be viewed as the stochastic instantaneouscharging price. For high prices λt
i = μQti > −β t , the VQOC
dictates the full discharge Ptb,i (Q
t ) = Pminb,i . Conversely, the
battery units can afford full charge if the price is low; i.e.,λt
i = μQti < −αt . It is worth stressing that a closed-form solu-
tion of Ptb,i is generally not available when λt
i ∈ [−αt ,−β t ],where one must resort to solving (22) numerically.
Leveraging this intuition, we will establish the follow-ing lemma on the virtual queue bounds, which is usefulfor our main theorem. Suppose γ := 1/min
{Cmax
i − Cmini +
Pminb,i − Pmax
b,i ,∀i}> 0 holds.
Lemma 3: If the step size satisfies μ ≥ μ := γ (α − β),
then the VQOC guarantees the virtual queue Qti ∈
[− αμ+
Pminb,i ,Cmax
i − Cmini − α
μ+ Pmin
b,i
]for all i and t .
Proof: The proof proceeds by induction. First, set Qt0 ∈[
− αμ
+ Pminb,i ,Cmax
i − Cmini − α
μ+ Pmin
b,i
], and suppose that

WANG et al.: DYNAMIC ENERGY MANAGEMENT FOR SMART-GRID-POWERED COORDINATED MULTIPOINT SYSTEMS 1355
this holds for all {Qti }i at slot t . We will show the bounds hold
for {Qt+1i }i as well in subsequent instances.
c1) If Qti ∈ (−β
μ,Cmax
i − Cmini − α
μ+ Pmin
b,i ], it follows
from Lemma 2 that Qt+1i = Qt
i + Pminb,i ∈ (− α
μ+ Pmin
b,i ,
Cmaxi − Cmin
i − αμ
+ Pminb,i ) holds provided that −α
μ<
−βμ
and Pminb,i < 0.
c2) If Qti ∈ [− α
μ,
−βμ
], then Qt+1i = Qt
i + Ptb,i (Q
t ) ∈ [Qti +
Pminb,i , Qt
i + Pmaxb,i ] ⊆ [− α
μ+ Pmin
b,i ,−βμ
+ Pmaxb,i ] ⊆
[− αμ
+ Pminb,i ,Cmax
i − Cmini − α
μ+ Pmin
b,i ], which holdsusing that μ ≥ μ.
c3) If Qti ∈ [− α
μ+ Pmin
b,i ,− αμ), then by Lemma 2 we have
Qt+1i = Qt
i + Pmaxb,i ∈ [− α
μ+ Pmin
b,i + Pmaxb,i , − α
μ+
Pmaxb,i ) ⊆ (− α
μ+ Pmin
b,i , Cmaxi − Cmin
i − αμ
+ Pminb,i ),
where the last step follows from the facts Pmaxb,i > 0,
−αμ<
−βμ
, and case c2).�
Consider now the linear mapping
Cti = Qt
i + α
μ+ Cmin
i − Pminb,i , i = 1, . . . , I. (25)
It can be readily seen from Lemma 3 that Cmini ≤ Ct
i ≤ Cmaxi
holds for all i and t ; i.e, (13b) is always satisfied under theVQOC. In addition, the battery (dis)charging dynamics (13c)are met since they coincide with those of the virtue queues (24).Hence, the proposed VQOC scheme yields a feasible dynamiccontrol policy for the problem (13).
C. Main Theorem
Based on Lemmas 1 and 3, it is now possible to arrive at ourmain result.
Theorem 1: If we set Q0i = C0
i − αμ
+ Pminb,i − Cmin
i , ∀i , andselect a stepsize μ ≥ μ, then the proposed VQOC yields a fea-sible dynamic control scheme for (17), which is asymptoticallyoptimal in the sense that
limT →∞
1
T
T −1∑t=0
E[∑
i
G(Pti (Q
t ))] ≤ G∗ + μM
whereμ := (α − β)/min{
Cmaxi − Cmin
i + Pminb,i − Pmax
b,i ,∀i}
,
and M := 12
∑i (max{Pmax
b,i ,−Pminb,i })2.
Clearly, the minimum optimality gap (regret) between theVQOC and the offline scheduling is given by
μM = 1
2γ (α − β)
∑i
(max{Pmaxb,i ,−Pmin
b,i })2.
Asymptotically (sub)optimal solution can be attained if we havevery small price difference (α − β), or γ incurred by e.g., verylarge battery capacities {Cmax
i }i . This makes sense intuitivelybecause when all BS batteries have large capacity, the upperbounds in (13b) are loose. With proper initialization, the VQOCusing any μ will be feasible for (13). We can then reach theoptimal G∗ as close as possible. In addition, let us consider a
homogeneous setup, which is common in practice: −Pminb,i =
Pmaxb,i = ηCmax
i = ηC and Cmini = 0 for all i . Then it can be
seen that μM = 12 I C(α − β)
η2
1−2η which is an increasing func-
tion for η ∈ (0, 12 ). Hence, a small (dis)charging efficiency η
can also result in a near optimal scheduling under the VQOC.Problem (13) is indeed an SDP relaxation of the original
problem (10). If the obtained solution for (13) satisfies the con-dition rank(Xt
k∗) = 1, ∀k, t , then it clearly yields the optimal
beamforming vectors wtk∗ of (10) as the (scaled) eigenvector
with respect to the only positive eigenvalue of Xtk∗. Fortunately,
it was shown in [31, Them. 1] that the S-procedure based SDPin (13) always returns a rank-one optimal solution Xt
k∗, ∀k, t ,
when the uncertainty bounds εtk are sufficiently small. If εk is
large, existence of rank-one optimal solutions for (13) cannot beprovably guaranteed. In this case, a randomized rounding strat-egy [32] is often adopted to obtain vectors wt
k∗ from Xt
k∗ that
nicely approximates the solution of the original problem (10).Even though no proof is available to ensure a rank-one solutionwhen εk is large, it has been extensively observed in simula-tions that the SDP relaxation always yields a rank-one optimalsolution [31]. This confirms the view that the asymptoticallyoptimal beamforming vectors for the original problem (10) willbe obtained by our approach with high probability.
V. NUMERICAL TESTS
In this section, simulated tests are presented to demonstratethe efficacy of the proposed approach and justify our analyti-cal claims. The Matlab-based modeling package CVX 2.1 [30]and SDPT3 [33] are used to solve the resulting optimizationproblem (22). All numerical tests are implemented on a PC witheight 3.40 GHz Intel cores and 32 GB RAM.
Two configurations of the considered CoMP network aretested: (S1) I = 2 BSs each with M = 2 transmit antennas, andK = 10 mobile users (small size); and (S2) I = 4 BSs eachwith M = 2 transmit antennas, and K = 15 mobile users (largesize).
Under (S1), the purchase price αt is generated from a foldednormal distribution; that is, αt = |x | with x ∼ N(3, 3). Theselling price is set to β t = rαt with r = 0.9. Samples of the har-vested energy {Et
i }i,t are generated from a Weibull distributedwind speed and wind-speed-to-wind-power mapping. The windpower capacity of each farm is Emax = 10 kW, unless statedotherwise [34]. For (S2), the purchase price αt is obtainedfrom the hourly electricity prices in New York from Jan. 1to Jan. 30, 2015 [35]. The harvested energy {Et
i } is a scaledversion of the hourly wind generation connected to the PJMgrids during the same periods [36]. The limits of Pg,i , Ci ,Pb,i and the initial SoC C0
i are listed in Table I. Following theSamsung energy storage solutions [37], battery capacity Cmax
is set to 50 kW in (S1), and 100 kW in (S2) for all BSs. Theestimated channel state ht
k is a zero-mean complex-Gaussianrandom variable with unit variance, while the maximum pre-diction error is (εt
k)2 = 0.1. Finally, the stepsize is chosen as
μ ≡ μ [cf. Theorem 1].The proposed approach is compared with two baseline algo-
rithms including VQOC without RES (no-RES), and greedyscheme that aims at minimizing the instantaneous transaction

1356 IEEE JOURNAL ON SELECTED AREAS IN COMMUNICATIONS, VOL. 34, NO. 5, MAY 2016
TABLE IGENERATING CAPACITIES, BATTERY INITIAL ENERGY AND CAPACITY,
AND CHARGING LIMITS. ALL UNITS ARE KW
Fig. 3. Comparison of the average transaction cost (S1).
cost per time slot. For the greedy algorithm, instantaneousdecisions {Xt
k, τtk , Pt
i } are obtained by solving the convex prob-lem (13) per slot t with fixed {Ct
i }i∈I. Feasibility of thesolutions across horizons is guaranteed by simply updatingCt+1
i via (13c). Note that all surplus or shortage energy mustbe traded per slot in order to minimize the instantaneous cost.Therefore, storage units essentially do not play a role sincethere is no (dis)charging activity. This makes the greedy schememyopic and vulnerable to high future purchase prices.
In Figs. 3 and 4, the average transaction costs (13a) of theproposed VQOC, the no-RES schedule, and the greedy algo-rithm are compared for both (S1) and (S2). Note that theVQOC approach incurs the same computational complexityas the greedy algorithm. Clearly, within 500 iterations (timeslots) VQOC converges to a transaction cost lower than theones resulting from the no-RES schedule, and the greedy algo-rithm in Fig. 3. Intuitively, this is because the proposed VQOCcan intelligently leverage the energy storage to hedge againstfuture large losses while the greedy scheme cannot. The per-formance gain of the proposed approach is shown in Fig. 4for the non i.i.d. case. When prices peak, considerable costsavings are obtained by the proposed algorithm that intelli-gently leverages stored energy in the battery with transactions.Specifically, more locally stored energy will be utilized to bal-ance out the energy shortage when the purchase price αt is high.Likewise, additional excess energy can be sold to the main gridwith a high selling price β t . The introduced transaction mecha-nism essentially confirms the advantage of the battery-deployedcommunication system design to mitigate the grid uncertainty.
The energy purchase prices αt , selling prices β t , Lagrangianmultipliers λt
1, as well as the real-time battery (dis)charging
Fig. 4. Comparison of the average transaction cost (S2).
actions Ptb,1 are shown in Fig. 5. It can be seen that we
have Ptb,1 = Pmin
b,1 when λti > −β t at t = 1, 3, 5, 7, 8, 11, while
Ptb,1 = Pmax
b,1 when λti < −αt at t = 2, 4, 6, 9, 10. Such map-
ping relationships are also true for the slots t > 12 and Ptb,2,
which corroborate the assertion of Lemma 2. It is worth men-tioning that the battery switching rate is in the time scale of theonline scheduling, which can be in the order of (milli) secondsor even minutes depending on the system design requirements.For the sake of battery health and lifespan, it is desirableto control the charging and discharging switch frequency. Toachieve this goal, we can simply impose a battery switchingcost or constraint [10], or design and implement a two timescale scheduling approach where the battery can be operatedin the slow time scale [38].
Figs. 6 and 7 demonstrate how the SoC’s feasibility isaffected by the stepsize μ. In Fig. 6, the SoC is always feasible(Cmin
1 ≤ Ct1 ≤ Cmax
1 ) when μ = μ. In contrast, if we chooseμ = 0.5μ that does not satisfy the stepsize condition in Lemma3, then Ct
1 exceeds its upper bound very often as corroboratedby Fig. 7.
The average transaction costs of the VQOC and greedyapproaches with respect to the storage capacity Cmax aredepicted in Fig. 8. It can be seen that the VQOC’s transactioncost deceases monotonically as Cmax increases. This corrob-orates the result of Theorem 1 dictating that the optimalitygap μM , as well as the optimal value G∗ is decreasing withCmax. Note that as analyzed earlier, the greedy algorithm cannotbenefit from the increase of the storage capacity,
Figs. 9 and 10 show the average cost with respect to the priceratio r = β t/αt , where αt is fixed. We studied two scenarios:i) small harvested wind power Emax = 10 kW, and ii) a largeone Emax = 15 kW. Clearly, for both scenarios, the averagecost of the VQOC decreases as r increases. This is because theoptimality gap μM and the optimal value G∗ are decreasingfunctions with respect to r .
Moreover, it is interesting to see that the greedy algorithmexhibits different performance in these two cases. When the

WANG et al.: DYNAMIC ENERGY MANAGEMENT FOR SMART-GRID-POWERED COORDINATED MULTIPOINT SYSTEMS 1357
Fig. 5. VQOC based power schedule of Ptb,1 (S1).
Fig. 6. VQOC based power schedule of Ct1 (S1, μ = μ).
Fig. 7. VQOC based power schedule of Ct1 (S1, μ = 0.5μ).
wind power is small, most of the time greedy algorithm hasto purchase shortage energy in order to support the CoMP’soperation. As shown in Fig. 9, the average transaction cost isnot affected by only increasing the selling price β t in this case.
Fig. 8. Average transaction cost versus Cmax1 (S1, r = 0.9).
Fig. 9. Average transaction cost versus r = βt/αt (S1).
Fig. 10. Average transaction cost versus r = βt/αt (S1, Emax = 15).
Conversely, by taking advantage of large harvested wind power,greedy algorithm can make more profits by selling the surpluswith the increase of β t . Hence, in Fig. 10 the average cost of

1358 IEEE JOURNAL ON SELECTED AREAS IN COMMUNICATIONS, VOL. 34, NO. 5, MAY 2016
Fig. 11. SINR cumulative distribution function (S1).
Fig. 12. SINR cumulative distribution function (S2).
the greedy scheme is decreasing in r , with lower performancegain relative to VQOC.
Finally, the performance of the worst-case SINR design[cf. (4)–(6)] is demonstrated in Figs. 11 and 12. The black solidline indicates the SINR threshold γk = 0.1,∀k. The non-robustscheme simply treats the estimated channel ht
k as the actualone, and plugs it into the SINR constraint SINRk({wt
k}) ≥γk . This constraint can be transformed into a linear matrixinequality ht H
k Ytk ht
k − σ 2k ≥ 0, which is a relaxed version of
our proposed counterpart in (12). For both the robust and non-robust approaches, each transmit beamformer wt
k is obtainedas the principal eigenvector associated with the largest eigen-value of the optimal Xt
k . The cumulative density function of theactual SINR is then available by evaluating (2) with 1, 000 i.i.d.channel realizations. In Fig. 11, there are 30% of the realiza-tions violating the SINR constraint for the non-robust scheme,while only about 1.5% for the proposed approach. Similarly, for(S2) in Fig. 12, the non-robust scheme violates the SINR con-straint 20% of the time with SINR violation, while only 0.9%for our novel scheme. Note that the SINR constraint violationof the proposed approach are due to the possibly inexact SDPrelaxation.
VI. CONCLUSIONS
In this paper, real-time energy management and robusttransmit beamforming designs were developed for smart-gridpowered CoMP transmissions. Leveraging the distributedstorage units, base stations are able to trade shortage or surplusenergy with the main grid to maintain the operations. Takinginto account the uncertainties of both channel estimationand harvested renewables, a stochastic optimization problemwas formulated to minimize the expected transaction costwhile satisfying the worst-case QoS requirements. Clearly,batch schemes cannot be devised due to the infinite horizon.Inspired by Lyapunov optimization techniques, a virtual-queuebased online algorithm was thus developed to obtain feasibledecisions ‘on-the-fly’ by relaxing the time-coupling constraintsarising due to the storage dynamics. Interestingly, the novelmethod was proved asymptotically optimal even withoutknowing the probability density function of the underlyingstochastic processes. Extensive numerical tests justify theeffectiveness and merits of the proposed approach for bothi.i.d. and non-i.i.d. scenarios.
The present framework opens new directions for green wire-less communications that aim at utilizing effectively energysources. Interesting future works include e.g., the incorporationof DC/AC power flows, contingency constraints, battery-healthconscious dynamic scheduling, as well as various types of stor-age units. Moreover, probability SINR constraints and differentuncertainty sets are worth investigating.
REFERENCES
[1] R. Irmer et al., “Coordinated multipoint: Concepts, performance, andfield trial results,” IEEE Commun. Mag., vol. 49, no. 2, pp. 102–111, Feb.2011.
[2] H. Dahrouj and W. Yu, “Coordinated beamforming for the multicellmulti-antenna wireless system,” IEEE Trans. Wireless Commun., vol. 9,no. 5, pp. 1748–1759, May 2010.
[3] J. Zhang, R. Chen, J. Andrews, A. Ghosh, and R. W. Heath, “NetworkedMIMO with clustered linear precoding,” IEEE Trans. Wireless Commun.,vol. 8, no. 4, pp. 1910–1921, Apr. 2009.
[4] C. Ng and H. Huang, “Linear precoding in cooperative MIMO cel-lular networks with limited coordination clusters,” IEEE J. Sel. AreasCommun., vol. 28, no. 9, pp. 1446–1454, Dec. 2010.
[5] 3TIER. (2006). Western Wind Resources Dataset [Online]. Available:http://wind.nrel.gov/Web_nrel/
[6] CAISO. (2015). Daily Renewable Output Data [Online]. Available:http://www.caiso.com/green/renewableswatch.html
[7] E. Oh, B. Krishnamachari, X. Liu, and Z. Niu, “Toward dynamic energy-efficient operation of cellular network infrastructure,” IEEE Commun.Mag., vol. 49, no. 6, pp. 56–61, Jun. 2011.
[8] A. Tolli, H. Pennanen, and P. Komulainen, “Decentralized mini-mum power multi-cell beamforming with limited backhaul signaling,”IEEE Trans. Wireless Commun., vol. 10, no. 2, pp. 570–580, Feb.2011.
[9] Y. Shi, J. Zhang, and K. Letaief, “Group sparse beamforming for greencloud-RAN,” IEEE Trans. Wireless Commun., vol. 13, no. 5, pp. 2809–2823, May 2014.
[10] Y. Zhang, N. Gatsis, and G. B. Giannakis, “Robust energy managementfor microgrids with high-penetration renewables,” IEEE Trans. Sustain.Energy, vol. 4, no. 4, pp. 944–953, Oct. 2013.
[11] X. Liu and W. Xu, “Economic load dispatch constrained by wind poweravailability: A here-and-now approach,” IEEE Trans. Sustain. Energy,vol. 1, no. 1, pp. 2–9, Apr. 2010.
[12] X. Guan, Z. Xu, and Q. Jia, “Energy-efficient buildings facilitated bymicrogrid,” IEEE Trans. Smart Grid, vol. 1, no. 3, pp. 243–252, Dec.2010.
[13] G. B. Giannakis, V. Kekatos, N. Gatsis, S. Kim, H. Zhu, andB. Wollenberg, “Monitoring and optimization for power grids: A sig-nal processing perspective,” IEEE Signal Process. Mag., vol. 30, no. 5,pp. 107–128, Sep. 2013.

WANG et al.: DYNAMIC ENERGY MANAGEMENT FOR SMART-GRID-POWERED COORDINATED MULTIPOINT SYSTEMS 1359
[14] S. Bu, F. Yu, Y. Cai, and X. Liu, “When the smart grid meets energy-efficient communications: Green wireless cellular networks powered bythe smart grid,” IEEE Trans. Wireless Commun., vol. 11, no. 8, pp. 3014–3024, Aug. 2012.
[15] J. Xu, Y. Guo, and R. Zhang, “CoMP meets energy harvesting: A newcommunication and energy cooperation paradigm,” in Proc. Globecom,Atlanta, GA, USA, Dec. 2013, pp. 2508–2513.
[16] J. Xu and R. Zhang, “Cooperative energy trading in CoMP systemspowered by smart grids,” IEEE Trans. Veh. Technol., vol. 65, no. 5, May2016.
[17] D. Niyato, X. Lu, and P. Wang, “Adaptive power management for wire-less base stations in a smart grid environment,” IEEE Wireless Commun.,vol. 19, no. 6, pp. 44–51, Dec. 2012.
[18] X. Wang, Y. Zhang, G. B. Giannakis, and S. Hu, “Robust smart-grid pow-ered cooperative multipoint systems,” IEEE Trans. Wireless Commun.,vol. 14, no. 11, pp. 6188–6199, Nov. 2015.
[19] R. Urgaonkar, B. Urgaonkar, M. Neely, and A. Sivasubramaniam,“Optimal power cost management using stored energy in data centers,” inProc. ACM SIGMETRICS, San Jose, CA, USA, Jun. 2011, pp. 221–232.
[20] S. Lakshminaryana, H. V. Poor, and T. Quek, “Cooperation and storagetrade-offs in power grids with renewable energy resources,” IEEE J. Sel.Areas Commun., vol. 32, no. 7, pp. 1–12, Jul. 2014.
[21] L. Georgiadis, M. Neely, and L. Tassiulas, “Resource allocation andcross-layer control in wireless networks,” Found. Trends Netw., vol. 1,pp. 1–144, 2006.
[22] N. Vucic and H. Boche, “Robust QoS-constrained optimization of down-link multiuser MISO systems,” IEEE Trans. Signal Process., vol. 57,no. 2, pp. 714–725, Jun. 2009.
[23] F. Genoese, M. Genoese, and M. Wietschel, “Occurrence of negativeprices on the German spot market for electricity and their influence onbalancing power markets,” in Proc. 7th Int. Conf. Eur. Energy Market,Madrid, Spain, Jun. 2010, pp. 1–6.
[24] I. Polik and T. Terlaky, “A survey of the S-lemma,” SIAM Rev., vol. 49,no. 3, pp. 371–418, 2007.
[25] D. P. Bertsekas, Convex Optimization Theory. Belmont, MA, USA:Athena Scientific, 2009.
[26] A. Stolyar, “Maximizing queueing network utility subject to stability:Greedy primal-dual algorithm,” Queueing Syst., vol. 50, pp. 401–457,2005.
[27] X. Wang, G. B. Giannakis, and A. Marques, “A unified approach to QoS-guaranteed scheduling for channel-adaptive wireless networks,” Proc.IEEE, vol. 95, no. 12, pp. 2410–2431, Dec. 2007.
[28] A. Eryilmaz and R. Srikant, “Fair resource allocation in wireless net-works using queue-length-based scheduling and congestion control,”IEEE/ACM Trans. Netw., vol. 15, no. 6, pp. 1333–1344, Dec. 2007.
[29] N. Gatsis, A. Ribeiro, and G. B. Giannakis, “A class of convergent algo-rithms for resource allocation in wireless fading networks,” IEEE Trans.Wireless Commun., vol. 9, no. 5, pp. 1808–1823, May 2010.
[30] M. Grant, S. Boyd, and Y. Ye. (2012, Sep.). CVX: Matlab Softwarefor Disciplined Convex Programming, version 2.1 [Online]. Available:http://cvxr.com/cvx
[31] E. Song, Q. Shi, M. Sanjabi, R. Sun, and Z.-Q. Luo, “RobustSINR-constrained MISO downlink beamforming: When is semidefi-nite programming relaxation tight?” EURASIP J. Wireless Commun.Netw., vol. 2012, no. 243, pp. 1–11, Aug. 2012, doi: 10.1186/1687-1499-2012-243
[32] P. Tseng, “Further results on approximating nonconvex quadratic opti-mization by semidefinite programming relaxation,” SIAM J. Optim.,vol. 14, no. 1, pp. 268–283, Jul. 2003.
[33] K. C. Toh, M. J. Todd, and R. H. Tutuncu, “SDPT3—A Matlab softwarepackage for semidefinite programming,” Optim. Methods Softw., vol. 11,pp. 545–581, 2009.
[34] Y. Zhang, N. Gatsis, and G. B. Giannakis, “Risk-constrained energy man-agement with multiple wind farms,” in Proc. 4th IEEE-PES Innov. SmartGrid Technol., Washington, DC, USA, Feb. 2013, pp. 1–6.
[35] National Grid. (2015, Jan.). Hourly Electric Supply Charges in New York[Online]. Available: https://www.nationalgridus.com/
[36] PJM. (2015, Jan.). Pennsylvania-New Jersey-Maryland Interconnection(PJM) Hourly Real-Time Wind Generation [Online]. Available: http://www.pjm.com/markets-and-operations/ops-analysis.aspx
[37] Samsung SDI. (2015). Samsung Energy Storage System [Online].Available: http://www.samsungsdi.com/ess/overview
[38] Y. Yao, L. Huang, A. Sharma, L. Golubchik, and M. Neely, “Datacenters power reduction: A two time scale approach for delay tolerantworkloads,” in Proc. INFOCOM, Orlando, FL, USA, Mar. 2012, pp.1431–1439.
Xin Wang (SM’09) received the B.Sc. and M.Sc.degrees from Fudan University, Shanghai, China, in1997 and 2000, respectively, and the Ph.D. degreefrom Auburn University, Auburn, AL, USA, in 2004,all in electrical engineering. From September 2004to August 2006, he was a Postdoctoral ResearchAssociate with the Department of Electrical andComputer Engineering, University of Minnesota,Minneapolis, MN, USA. In August 2006, hejoined the Department of Computer and ElectricalEngineering and Computer Science, Florida Atlantic
University, Boca Raton, FL, USA, as an Assistant Professor and, in August2010, was promoted and became an Associate Professor. He is currently aProfessor with the Department of Communication Science and Engineering,Fudan University. His research interests include stochastic network optimiza-tion, energy-efficient communications, cross-layer design, and signal process-ing for communications. He served as an Associate Editor for the IEEESIGNAL PROCESSING LETTERS. He currently serves as an Associate Editorfor the IEEE TRANSACTIONS ON SIGNAL PROCESSING and as an Editor forthe IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY.
Yu Zhang (S’11) received the B.Eng. and M.Sc.degrees (both with highest Hons.) from WuhanUniversity of Technology, Wuhan, China, and fromShanghai Jiao Tong University, Shanghai, China, in2006 and 2010, respectively, and the Ph.D. degreefrom the University of Minnesota, Minneapolis, MN,USA, in 2015, all in electrical engineering. He is cur-rently a Postdoctoral Associate with the Departmentof Electrical and Computer Engineering, Universityof Minnesota. His research interests include smartpower grids, optimization theory, machine learning,
wireless communications, distributed energy management with renewables, andenergy data analytics. He was the recipient of the Huawei Scholarship andthe Infineon Scholarship from the Shanghai Jiao Tong University (2009), theECE Department Fellowship from the University of Minnesota (2010), and theStudent Travel Awards from the SIAM and the IEEE Signal Processing Society(2014).
Tianyi Chen (S’15) received the B.Eng. degree (withhighest Hons.) in communication science and engi-neering from Fudan University, Shanghai, China, in2014. He is currently pursuing the Ph.D. degree inECE at the University of Minnesota, Minneapolis,MN, USA. Since August 2014, he has been withSPiNCOM. His research interests include networkoptimization with applications to green communi-cations, and sustainable data centers. He received aNational Scholarship from China in 2013, and theUMN ECE Department Fellowship in 2014.
Georgios B. Giannakis (F’97) received the Diplomadegree in electrical engineering from the NationalTechnical University of Athens, Athens, Greece,in 1981, the M.Sc. degree in electrical engi-neering, the M.Sc. degree in mathematics, andthe Ph.D. degree in electrical engineering fromthe University of Southern California (USC), LosAngeles, CA, USA, in 1983, 1986, and 1986, respec-tively. Since 1999, he has been a Professor with theUniversity of Minnesota, Minneapolis, MN, USA,where he now holds an ADC Chair in Wireless
Telecommunications, ECE Department, and serves as the Director of theDigital Technology Center. He has authored more than 385 journal papers, 650conference papers, 22 book chapters, 2 edited books and 2 research monographs(h-index 115). His research interests include communications, networking andstatistical signal processing, Big Data, wireless cognitive radios, and networkscience with applications to social, brain, and power networks with renewables.He is the Co-Inventor of 25 patents issued. He is a Fellow of EURASIP, and hasserved the IEEE in a number of posts, including that of a Distinguished Lecturerfor the IEEE-SP Society. He was the corecipient of the 8 Best Paper Awardsfrom the IEEE Signal Processing (SP) and Communications Societies, includ-ing the G. Marconi Prize Paper Award in Wireless Communications. He wasalso the recipient of the Technical Achievement Awards from the SP Society(2000), from EURASIP (2005), a Young Faculty Teaching Award and the G. W.Taylor Award for Distinguished Research from the University of Minnesota,and the IEEE Fourier Technical Field Award (2015).