Embed Size (px)
Citation preview

Rochester Institute of Technology Rochester Institute of Technology
RIT Scholar Works RIT Scholar Works
Theses
1995
Dynamic model update program Dynamic model update program
Feroz Ahmed
Follow this and additional works at: https://scholarworks.rit.edu/theses
Recommended Citation Recommended Citation Ahmed, Feroz, "Dynamic model update program" (1995). Thesis. Rochester Institute of Technology. Accessed from
This Thesis is brought to you for free and open access by RIT Scholar Works. It has been accepted for inclusion in Theses by an authorized administrator of RIT Scholar Works. For more information, please contact [email protected].

DYNAlVIIC lVIODEL UPDATE PROGRAM
Feroz Ahmed
A Thesis submitted in partial fulfillment of the requirementsfor the degree of Masters of Science in
Mechanical Engineering
Approved by:
Professor
Thesis Advisor: Dr. Richard G. Budynas
Professor
Dr. Mark H. Kempski
Professor
Dr. K. Kocherberger
Professor _
Depnrtment Hend: Dr. Charles Haines
Department of Mechanical EngineeringCollege of Engineering
Rochester Institute of TechnologyRochester, New York
August 1995

Permission for Copying:
I, Feroz Ahmed, hereby grant permiSSion to the Wallace Memorial Library of theRochester Institute of Technology to reproduce my thesis entitled "Dynamic ModelUpdate Program" in whole or in part for non-commercial purposes.
However, I prefer to be contacted each time a request for reproduction is made forcommercial purposes. I can be reached at the following address:
Feroz Ahmed36 East Squire Dri\'e, ,-\pt # 7Rochester, NY 14623
(716) 475-9954
10Aug '95 Feroz Ahmed

Acknowledgment
I would like to thank
My parents, my wife and my sisters for their continued support during the years it
took to complete my thesis.
Dr. Richard Budynas who was there for me till my completion, never giving in nor
giving up on me.
Dr. Vic Genberg for his help and support.
Dr. (Mrs.) Sarojini Laha who always reminded me that I had to finish my thesis.
Dr. Laha, I promised I'll finish. Here's my Masters!!

Abstract:
This thesis presents a general method to modify the properties of a finite element model
of a structure to better correlate analytical (FE) modal data with experimental modal data.
A FORTRAN program to correlate finite element and experimental results of a structure
by executing a Cross-Orthogonality check was developed. Sensitivity coefficients of a
structure were generated to tune the FE model to match the experimental model. These
sensitivity coefficients were generated through sensitivity analysis which illustrates the
change in response of a structure for known changes in parameters. This thesis covers the
theory, procedure, and application of sensitivity analysis. Sensitivity coefficients were
generated through MSC/NASTRAN (SOL 63 and SOL 53) and the coefficients were
used to tune a finite element model. A method that employs nonlinear coefficients
developed by Wada and Kuo was also used to increase the rate of convergence. The
application of Wada and Kuo method was simplified and the calculations needed to
obtain nonlinear coefficients were significantly reduced. The rate of convergence of linear
coefficient model tuning is compared with the rate of convergence of nonlinear
coefficient model tuning.
m

TABLE OF CONTENTS
Acknowledgment ii
Abstract iii
Table of Contents iv
List of Symbols v iii
List of Figures xi
List of Graphs xii
List of Tables xiii
1) Introduction 1
1.1 Finite Element Analysis I
1 .2 Experimental Modal Analysis (EMA) 3
1.3 Correlation -
1.3.1 Correlation Methods 6
1.4 Eigenvector Truncation / Expansion
1.5 Program COMPARE 3
1.6 Sensitivity Analysis and Modal Tuning ': 3
2) Background
2.1 Finite Element Analysis
2.2 MSG'NASTRAN.
2.3 Analytical-Experimental Interface
2.4 Cross-Orthogonality Check
2.5 Reasons for Model Tuning.
2.6 Sensitivity Analvsis and Parameter Estimation
15
lo
iv

3) Theory 13
3.1 Derivation of System Equations 13
3.1.1 Single Degree of Freedom (SDOF) System 18
3.1.2 Multiple Degree ofFreedom (MDOF) System 20
3.2 FE Matrix Solutions 23
3.3 Eigenvalue Problem 23
3.3.1 Eigenvector Normalization 25
3.3.1.1 Maximum Normalization 25
3.3.1.2 Mass Normalization 25
3.4 Eigenvector Partitioning and Correlation 26
3.5 Objective and Significance ofEigenvector Partitioning .... 32
3.5.1 Corresponding Node Location 33
3.6 Example Problem 34
4) Experimental Modal Analysis 40
4.1 Background 40
4.1.1 Application ofExperimental Modal Analysis (EMA) . . . 41
4.1.2 Correlation 41
4.2 Frequency Response Analysis 42
4.2.1 Single Degree of Freedom System 42
4.2.2 Residues 44
4.2.3 Multi-Degree of Freedom Svstem 45
4.3 Curve Fitting 49
4.4 Practical Considerations 50
4.4.1 Aliasing 51
4.4.2 Leakage 51
4.4.3 Hammer Tip 51
4.5 Experimental Modal Analysis of a Plate Model 52
4.6 Testing Pitfalls 53
5) Correlation Techniques 55
5.1 Background 55
5.2 Correlation Techniques 56
5.2.1 Visual Comparison 57
5.2.2 Mode Shape Difference 57
5.2.3 Modal Assurance Criteria (MAC) 58
5.2.4 Coordinate Modal Assurance Criteria (COMAC) .... 59
5.2.5 Cross-Orthogonality Check 60

6) Sensitivity Analysis 61
6.1 Design Sensitivity Background 61
6.1.1 Design Optimization 62
6.2 Sensitivity Coefficients 63
6.2.1 Static Derivatives 63
6.2.2 Normal Modes- Eigenvalue Derivatives 66
6.2.3 Normal Modes- Eigenvector Derivatives 63
6.2.4 Parameter Update Procedure (Linear Coefficients) .... 72
6.2.5 Normal Modes- Non-Linear Coefficients 73
6.2.6 Parameter Update Procedure (Nonlinear Coefficients) ... 77
6.3 Model Tuning 80
6.4 Application 81
6.5 Test Case 1: Nonlinear Vs Linear Coefficients Model Update Procedures 36
6.5.1 Nonlinear Approach 89
6.5.1.1 Results 95
6.5.2 Linear Approach (simplified form) 96
6.5.2.1 Results 98
6.6 Comparison ofModel Update Methods 99
7) Summary of COMPARE Program 101
7.1 Objective 10!
7.2 Files Setup 101
7.3 Procedures of Program COMPARE 132
8) Project Statement13"
8.1 Test Case 1 - 3 Mass 3 Spring Model 109
8.2 Test Case 2 -- 3 Element Beam Model 10
8.2.1 Approach I . . Ill
8.2.1 Approach II ill
8.3 Results 112
S.4 Considerations and Recommendations 113
9) Conclusion
References
VI

Appendices
Appendix 1 Flow Charts: For the COMPARE Program and Model Update Procedures.
Appendix 2 Test Case 1: 3 Mass - 3 Spring Model.
Comparing Wada-Kuo and Ujalvo-Ting methods.
Appendix 3 Cross-Orthogonality Check.
Appendix 4 Source Code ofCOMPARE Program
Appendix 5 MSC/NASTRAN Data File and Mode Shape Plots for Plate Model
Appendix 6 SMS-STAR Data File and Mode Shape Plots for Plate Model
Appendix 7 SYSTUNE Data File and Mode Shape Plots for Plate Model
Appendix 8 Test Case 2: Three Element Beam Model.
Comparing Full and Partitioned EigenvectorModel Update Procedures
Appendix 9 Eigenvalue and Eigenvector Derivative Procedures.
NASTRAN Data File
Appendix 10 MSC/NASTRAN Data Cards
Appendix 11 Miscellaneous Data Files and Plots
VI 1

LIST OF SYMBOLS
M : Mass for a single degree of freedom system
C : Damping for a single degree of freedom system
K : Stiffness for a single degree of freedom system
t : Time variable
x0 : Initial value of parameter
X0 : Displacement constant
X(t) : Displacement function
X(t > : Velocity function
X(c) : Acceleration function
F(t) : Forcing function
co : Natural frequency
co, : Natural frequency of1th
mode
{0} : Eigenvector
[<>] : Matrix of eigenvectors
[Xfcj] : Displacement vectors
[Xftn : Velocity vectors
j,YYfyj : Acceleration vectors
Vlll

e' Q: Euler variable
DOF : Degree ofFreedom
[ I ] : IdentityMatrix
[M] : Mass for an N-DOF system
[C] : Damping for an N-DOF system
[K] : Stiffness for an N-DOF system
X,-: Eigenvalue of the
i*1
mode
*
Xj : Complex conjugate of X;
s : Complex variable in Laplace domain
[AY-sj] : Displacement matrix in the Laplace domain
[/f(sj\ : Transfer matrix in the Laplace domain
[///.*,)] : Transfer function in the Laplace domain
[F(^^] : Forcing matrix in the Laplace domain
cr : Damping value
Apqr : Residue of associated pole
Ap- : Complex conjugate of Apqr
H'
pq: Transfer function between points
'p'
and*q'
q : Generalized coordinates
\uu } : Displacement vector for N-DOF
IX

[ua ] : Displacement vector for A-set (accepted set)
[uQ ] : Displacement vector for O-set (omitted set)
(ro } : Element of eigenvalue sensitivity matrix
[rm ] : Transformation matrix
[Maar ] : Reduced Mass matrix
[Kaar ] : Reduced Stiffness matrix
[Coor 1 : Correlation matrix
[5] : Sensitivity matrix
X(t) : Velocity function
{}T
or [ ]T; Transpose of a vector or matrix respectively
[]"'
: Inverse of a matrix
I I : Determinant
x

List Of Graphs
Graph Description Page
1.1 Correlation Graph 5
6.1 Iteration Graph 100
XI

List Of Figures
Figures Description Page
1 Single Degree of Freedom Model (1-DOF) 18
2 Multi Degree of Freedom Model (N-DOF) 21
3 8 Mass - 9 Spring Model 34
4 2 mass - 3 Spring Model 81
5 3 Mass - 3 Spring Model 86
6 3 Element Beam Model 8-1
7 Undeformed Plate Model with Node Numbers 5-3
XI 1

List Of Tables
Tables Description Page
1.1 Table of Correlation 5
6.1 Modal data of 3 Mass - 3 Spring Model 87
2.1 Modal data of 3 Mass - 3 Spring Model 2-2
Xlll

Chapter 1: Introduction
The desire to achieve functional excellence and reliable operation has been the goal of
engineers from time immemorial. Perseverance and persistence were the main qualities
that spurred man to make improvements over his own creation. New methods and better
tools were developed to meet customer demands in the rapidly expanding global market.
Stiff international competition has imposed on today's designers a need to sharpen their
skills and tools to build better products ~ faster and cheaper. The financial benefit of
delivering a product to the market ahead of competition has significantly reduced design
cycle time, and forced engineers to capture potential defects even before building a
prototype.
1.1 Finite ElementAnalysis:
The tools available for performing analysis became better over the past few decades thus
resulting in more design changes in the last two decades than in the preceding two
centuries. The two critical driving forces that motivated development of efficient
techniques are:
Significantly reduced design cycle time.
Fligh price of errors.

The factor "High price oferrors"
encompasses the effects on profits of an
organization such as loss in revenues due to warranty costs and loss in business due to
displeased customers turning to another supplier. Historically, these factors have been
found to be critical to the survival of a company and therefore have attracted significant
attention. The challenges posed by these critical factors demand an accurate prediction of
the design's behavior and reliability. Efforts to predict a design's behavior prior to
making a prototype have propelled the development of finite element analysis. The
understanding and insight gained from a model's behavior assists in forecasting various
modes of failures, thus enabling design engineers to eliminate defects during early stages
of development. The present state of technological development has extensively
contributed to the field ofmechanical design leaving no limits butones'
imagination.
The development ofpowerful numerical techniques and their effective application
to the field ofmechanical design has increased the ability of engineers to quickly analyze
various aspects of a model. It has enabled design iteration to arrive at an optimal design.
The ability to accurately predict structural and functional characteristics of a model have
invigorated the "Concept toCommission"
design cycle. The capability to quickly analyze
multiple designs, with modifications, without time consuming prototype building and
testing has made a rapid rate of design progress possible.

Finite element methods (FEM) were used for a long time by select groups, but
there has been a rapid rise in users due to the availability ofuser-friendly FE software on
personal computers. A major factor in the growth of FEM applications was the
development of faster and less expensive digital computers that have brought this
analytical tool within easy reach of many industries and engineers. The growing
applications of finite element techniques have lead to development of new techniques to
effectively meet new challenges.
1.2 ExperimentalModalAnalysis (EMA) :
Experimental modal analysis is widely used in documenting dynamic response of a
structure by determining modal parameters (i.e., eigenvalues and eigenvectors) of the
structure. EMA is a non-destructive test. Therefore it has the significant benefit of
providing an inexpensive means for documenting multiple sets of data of a model and for
each subsequent modification.
Historically, EMA was used to document structural behavior of a model to
evaluate its structural integrity. Due to improvements in the field of EMA along with
increased awareness that EMA and FEM can mutually assist in development, the outputs
of EMA and FEM are now used in conjunction in design modification. The modal
parameters of the structure obtained from finite element analysis and experimental modal
analysis lend well to the process of correlation. Each set of EMA data can be correlated

with FEM results to validate the FE model and subsequently employed in the
improvement of the finite element model.
1.3 Correlation:
There has been significant progress in comparing computer generated results to the real-
life characteristics exhibited by the experimental models. A good correlation between
analytically predicted and experimentally observed behavior of a model enhances one's
faith in the numerical analysis (FEM), and ascertains accuracy of the results of any
subsequent analysis. During product development, when a FE model and its subsequent
modifications are analyzed without validation to arrive at a desired theoretical final
design, then it is very likely that the final results demonstrate a mismatch to the results of
a corresponding experimental model. An model is a mathematical
representation based on assumptions. Therefore, inspite of one's best efforts there is a
possibility for modeling errors. Hence it is desired that the results of the analytical model
be validated experimentally. The behavior of a final design as predicted by FE analysis is
often accurate in cases where the initial FE model was well correlated with the
experimental data before being subjected to extensive modification and analysis.
Application of correlation increases confidence in the final design and
significantly reduces re-analysis by capturing errors during the initial stages of design.
Better correlation techniques while highlighting the presence of errors have presented
analytical model means computational model

Table 1.1
Table ofCorrelation
FE / EXP. Modes Expl Exp2 Exp3 Exp4 Exp5 Exp6
FE1 0.899 0.085 0.130 0.058 0.000 0.140
FE2 0.120 0.880 0.240 0.075 0.059 0.024
FE3 0.040 0.070 0.940 0.140 0.000 0.066
FE4 0.220 0.150 0.099 1.000 0.090 0.054
FE5 0.090 0.100 0.070 0.099 0.870 0.100
FE6 0.180 0.060 0.000 0.000 0.110 0.960
Graph 1.1
Correlation Graph
1 000 -,
0.750
"50.500-
3U
0.250
0 000-
Expl
E\p. modes
FEl

means to grade the level of disagreement between the models. Correlation data can be
plotted thus substantiating a point with visible comparison rather than some numerical
values. For example, correlation data represented in the 3-D format as shown in the
Graph 1.1, displaying the level of similarity between FE and experimental data, is simpler
to read and interpret versus the same data presented in the table format in Table 1.1.
Experimental and FEM correlation is essential for all design applications to validate the
analytical (FE) model. Correlation provides information of the FE model's discrepancies
and expresses the similarity (or the lack of it) in its demonstrated behavior versus
experimental measurements.
1.3.1 Correlation Methods:
There are many methods of correlation. Some of the commonly used modal correlation
methods listed in the order of increasing accuracy and computational effort are:
Comparing values of eigenvalues between tests.
Visually comparing mode shapes.
Modal Assurance Criteria (MAC).
Cross-Orthogonality Check.
In the Industry and most academic applications, the correlation of experimental
and analytical data is commonly performed using MAC. However, Cross-Orthogonality
check which is a more rigorous and precise procedure than MAC, is rapidly gaining

acceptance as the preferred correlation procedure. The author used Cross-Orthogonality
check for this thesis to demonstrate the results at a higher level of accuracy and in-process
developed an easy-to-use program that performs Cross-Orthogonality check.
1.4 Eigenvector Truncation /Expansion :
Generally a FE model is a much larger DOF system than its corresponding experimental
model. The difference is mainly due to the limited accelerometer/excitation locations
(generally of one (1) DOF/node) of an experimental model versus the finely meshed
(generally of six (6) DOF/node) FE model, thus resulting in much larger analytical
eigenvectors than experimental eigenvectors. This difference in the size of eigenvectors
of the experimental and analytical model invariably requires some form of transition to
compare the two eigenvectors sets. The two methods to obtain analytical and
experimental eigenvectors of same size are:
Expand the experimental eigenvectors to match the analytical eigenvectors.
Reduce the analytical eigenvectors to match the experimental eigenvectors.
The method opted in this thesis is eigenvectors reduction, as it lends itself to
greater computational efficiency with little penalty on accuracy. The technique for
reducing FEM eigenvectors used in this thesis was developed by D.C. Krammer" .
Krammer's method employs partitioning of eigenvectors into A-set (accepted set) and0-
set (Omitted set) to develop a transformation matrix. The nodes of an analytical model

corresponding to the experimental model are located using a spherical search routine and
the information thus obtained is used to generate the'A'
and'0'
sets. The A-set, called
the accepted set, is the partitioned set of analytical eigenvectors that correspond to the
experimental eigenvectors. The O-set is the original analytical eigenvectors minus the
partitioned A-set. Both the A-set and O-set are necessary to develop the transformation
matrix.
To perform the Cross-Orthogonality check with the reduced A-set of the
analytical model and the experimental eigenvectors a reduced mass matrix is necessary.
The reduced mass matrix is generated from the analytical mass matrix through matrix
manipulation using a transformation matrix. The transformation matrix can also be used
to expand experimental eigenvectors to corresponding FE eigenvectors size. Once the
reduced eigenvectors and matrices are obtained the eigenvectors can be compared by
performing Cross-Orthogonality check with the reduced mass matrix. Commonly Cross-
Orthogonality check is performed using mass matrix; however, stiffness matrix can also
be used for model correlation. To check correlation results, while using stiffness matrix,
the eigenvalues of the model must be available.
1.5 COMPAREProgram:
A FORTRAN program was developed to partition the analytical eigenvectors into A-set
and O-set, and saves the data at each step while developing the transformation matrix.

The COMPARE (Cross-Orthogonality Matrix Procedures And REduction) program
developed by the author compares the analytical and experimental eigenvectors of a
model and outputs the correlation matrix along with the transformation matrix, and the
reduced mass and stiffness matrices. Correlation of the analytical and experimental
modal data was performed on an aluminum plate model(10"
x7"
x 1") to verify the
accuracy of the COMPARE program. The analytical plate model was modeled with free-
free boundary conditions, and the experimental plate model was placed on2"
of foam to
simulate free-free boundary conditions. The experimental data was documented by the
roving excitation method. The analytical solution was obtained employing
MSC/NASTRAN (MacNeal Schwendler Corporation) and the experimental data was
obtained using SMS (Structural Measurements Systems) STAR software. Certain
important filenames created by the program COMPARE are:
Reduced mass matrix in file"MAAR.OUT"
Reduced stiffness matrix in file"KGG.OUT"
Transformation matrix in file"TM.OUT"
and
Cross-Orthogonality check in file"CORR.OUT"
The COMPARE program compares models up to 150 nodes for FEM and 100
nodes for experimental. The limitation on nodes is due to the large size of the resulting
matrices and their respective computation. With larger dynamic page quota (computer
work space), the model size can be increased very easily.

1. 6 SensitivityAnalysis andModel Tuning:
Correlation of a computational model with an experimental model illustrates the
similarity in modal behavior between the FE and experimental model. The experimental
modal data is the representation of the structure's real-life dynamic behavior, provided
adequate precaution and care was exercised in obtaining the data. For perfectly matched
data sets, the correlation matrix will be an identity matrix. In the presence of
discrepancies between the data sets, the correlation matrix have diagonal elements
different from unity and will contain non-zero off-diagonal elements. These differences
from the identity matrix indicate the level of disagreement between models. When the
data sets do not match, the finite element model has to be modified to better correlate
with the experimental model. This process of modifying a FE model to better match an
experimental model is known as model tuning and it is an iterative process.
The process of model tuning can be controlled by establishing a relationship
between the change in response for a change in a given parameter. The method of
obtaining this relationship is called sensitivity analysis. Obtaining the sensitivity
coefficients gives direction and structure to an otherwise frustrating and time consuming
process ofmodel tuning. Sensitivity coefficients simplify the process ofmodel tuning and
are of significant importance in directing the process to rapidly achieve good correlation.
10

Chapter 2: Background
2. 1 Finite ElementAnalysis:
The development of the finite element method (FEM) started in the early 1 940s and an
early attempt at applying the procedure is credited to Courant, a French mathematician.
In 1943, Courant described an application to a torsional problem and demonstrated it by
setting up the solution of stresses in variational form. Initially FEM was applied to small
models and applications were limited to simple models, as solving the resultant equations
was too cumbersome. For an increase in the model's degrees of freedom (DOF), the size
and complexity of the equations to be solved increases geometrically. FEM attracted a lot
of attention, inspite of its challenges in solving large sets of equations, as benefits of the
method were realized by more users. Mainly due to the arrival of high speed digital
computers, coupled with the development of efficient numerical techniques, the field of
finite elements started to grow rapidly. The development of user-friendly and powerful
routines has widened the scope of application of finite elements from its humble
beginning. FEM has demonstrated significant growth from its early stages to the current
stage where models of intricate geometries as large as 50,000 DOF are easily solved.
The Automobile and Aerospace industries have been the main drivers for the current
rate of growth in FEM. The development of user-friendlypre- and post- processors has
made significant contributions in increasing the acceptance of finite element applications.
11

The analysis results can now be viewed graphically making it easier to examine the
results thus eliminating the need to pore over reams of information. The ability to animate
a model's dynamic behavior has greatly enhanced the understanding of the analytical
solutions of dynamic models and has made a significant contribution to modal analysis.
The desire for rapid product development coupled with the need to analyze increasingly
complex models has provided a fertile ground for finite element methods to flourish.
There have been tremendous financial benefits and notable savings in design iterations
due to application of FEM. Today, FEM can be used to analyze a wide spectrum of
models with:
Irregular shapes and intricate geometries like heart-valves,
Regular isotropic materials or composite materials,
Simple boundary conditions or complex boundary conditions.
2.2 MSC/NASTRAN:
There are several finite element packages available in the market today; however, the
most extensive software package currently available is MSC/NASTRAN. It was
developed for complex and highly precise analysis performed at NASA. NASTRAN is an
acronym that stands for N.ASA STRUCTURAL ANALYSIS. The rate of development
of this software has been very rapid and it operates on a wide array of operating systems
such as mainframes, workstations, and personal computers.
12

2.3 Analytical-Experimental Interface:
As the development and application of the finite element method grows, more engineers
will be expected to have a good understanding of FEM and its applications. The
analytical solutions generated from the finite element method should be authenticated
through tests to confirm the validity of the results. Experimental stress analysis does offer
some helpful information to check the FE results; however, it is time consuming to
collect data and often limited to specific regions on a model. For complex structures,
stress data acquisition can be very challenging. As the data acquisition locations are
usually fixed, it limits the flexibility of data acquisition.
For dynamic applications, experimental modal analysis (EMA) offers greater latitude
and flexibility relative to experimental stress analysis. EMA has some advantages over
experimental stress analysis and few of them are listed below
Faster data acquisition
Greater flexibility in moving test locations
Less test preparation
Format of test data suitable for correlation.
There were significant developments which have revitalized the field of experimental
modal analysis, including the ability to display mode shapes of a structure. The ability to
*
analytical model means computational model
13

display mode shapes of the finite element and experimental models has made it simple to
visually compare their modal behavior. Though visual modal display can be very
informative of a model's dynamic character, comparing mode shapes can be very
challenging especially if the models are complex with many degrees of freedom.
Therefore, one has to employ numerical correlation techniques to compare models with
large degrees of freedom. Techniques to correlate modal parameters of a finite element
model and experimental data have been listed in earlier section 1.3.1 and are explained in
Chapter 5: Correlation.
2.4 Cross-Orthogonality Check:
This correlation technique is explained in detail in section 3.4 of Chapter 3: Theory. In
the Industry and most academic applications, the correlation of experimental and
analytical data is commonly performed using MAC. Cross-Orthogonality employs the
model's inertial properties and is more rigorous and accurate correlation procedure than
MAC. Cross-Orthogonality check utilizes the special orthogonal properties of
eigenvectors in performing the correlation. When using the reduced mass matrix [MJ,
the reduced mass matrix is obtained by reducing the finite element mass matrix through
the application of a transformation matrix. The author used Cross-Orthogonality check
for this thesis to demonstrate the results at a higher level of accuracy.
14

The user should consider experimental data acquisition locations carefully such that
the process ofmodel comparison is made easier. With the advent of new technology, new
techniques, and better EMA programs, the next logical step in the chain of events was
model tuning, as it enhances correlation between models.
2.5 ReasonsforModel Tuning:
During the development of a computational model there may be present erroneous
regions that need to be identified and corrected. Modal correlation provides information
about discrepancies between analytical and experimental models. In the presence of
significant differences, the finite element model must be modified to match the
experimental model, as the carefully documented experimental data is accepted to be
"real-life"
data. The intent ofmodel tuning is to arrive at a good correlation between the
experimental and analytical models. However, care must be taken such that areas where
good correlation exists are not lost during model tuning.
Sensitivity analysis and information regarding the difference between models
provide the basis to calculate the required change in parameters to tune the FE model.
The results are used to arrive at better model correlation by effectively perturbing the
model parameters.
15

2. 6 SensitivityAnalysis and Parameter Estimation :
Consider the difference in the FEM and experimental models to be represented as an
equation (E(p)) dependent on the parameters (p) of the model. To improve model
correlation, the values of the parameters for a minimum value ofE(p) should be obtained.
Therefore, correlation of experimental and analytical modal data depends on parameter
estimation and it can be viewed as a minimization problem which can be expressed
mathematically as
E(p)=igj(Pi):i= I
Subject to g (p )<0p' <
p< p"
, [p!
andp"
are lower and upper limits]
Where p{ is the parameter and gj is a function of p-, that relates the variation in
response of the model to the parameter. For each parameter change there is a subsequent
change in response. A matrix can be formed such that a column consists of response
changes (3r() for each parameter change wpj ,and each row represents change in
response for various parameters. The resultant matrix is generally referred to as the
"SensitivityMatrix"
and denoted as \S~\ below.
16

[*]-
dn
dpi
dn
dp.
dn
dp.
dn
dp\
dn
dp,
dr.
dp.
dr. dr. dr.
dp, dp. dp.
Where r, is the ith response of the model and pj is the jth parameter of the model
respectively. With the generation of the above listed relationships the desired parameter
changes to tune the model are obtained. The details of Sensitivity analysis and Model
Tuning process are elaborated in Chapter 6: Sensitivity Analysis.
For large problems, especially in presence ofmultiple responses and parameters, the
estimation of the sensitivity matrix can be computationally intense. Therefore, several
parameters that effect a response of a model should be grouped, which reduces the
number of parameter variables to a manageable set. For example: height and width of a
model can be grouped into moment of inertia, thus reducing two parameters to one
parameter. Efficient application of sensitivity analysis is a means to reduce the iterations
to arrive at a good correlation between the analytical and experimental models.
17

Chapter 3: Theory
3.1 Derivations ofSystem Equations:
The theory of vibration is well documented in a wide selection of textbooks (see
reference 14 and 16); therefore, the topic is briefly dealt with here. The details of the
solution methods for vibration problems will be demonstrated for the particular cases
discussed. For more information on the theory of vibration refer to textbooks on
vibrations listed in the reference section.
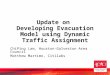
3.1. 1 Single Degree of Freedom (SDOF) System:
Figure 1 shows a spring-mass single degree of freedom system with damping.
^ X(t),X(t),X(t)
Figure 1
When the mass M of the system is acted upon by a harmonic force or disturbed
from its equilibrium position, the system reacts to regain its equilibrium condition.
Applying Newton's second law ofmotion to the system and resolving the forces we get
18

F(t)- KX(t)~ CX(t)= MX(t) (3-1)
Which can be rewritten as
MX{t) + CX{t) + KX{t) = F{t) (3-2)
If the forcing function is harmonic function of frequency co, then
F(t) =FQeiat andX=XQeimt
This implies that
X = XQia>eim'
and X ='
Then equation (3-2) can be written as
+iCaX0eiat
+KX0eiat
=F0eiui'
(3-3)
Eliminating common terms from both sides of the equation (3-3) we get
-Ma2X0+ i(oCX0 + KXQ
=
F0 (3-4)
C K
Ifwe divide equation (3-4) by Mai ,and substitute = 2 C,
andco~
-
iV/con
M
We obtain
m:
y a.;co<^
y J-^
v - ^>~'n>
+ui^J
+, , 2 ^-o
~~
T7~T (2-5)co"
Mo; Mo,. Mq:
Where conis the natural frequency in (rad/sec). Ifwe substitute r
=
co..
19

[l -r -
i2Cr]X0= %
The magnitude of the left side of the equation (3-6) is
/ +
i2Cr\=
^{l-r):^(2^r)2
This implies that
*fl =
Fq/,'K
|l - + ('C rf
If C = 0 and F<j = 0, then equation (3-5) reduces to the form
\ajX0
= 0
(3-6)
(3-7)
(3-8)
(3-9)
The knowledge of the characteristics of a SDOF system is essential for
understanding the dynamic behavior ofMultiple Degree ofFreedom (MDOF) system.
3.1.2 Multiple Degree ofFreedom (MDOF) System:
Structures in the real world are much more complex than the system discussed in the
previous section. Hence, ways must be found to analyze such structures to address the
various characteristics of the system. To analyze complex structures they can be viewed
as a combination of SDOF systems and hence referred to as MDOF system. To explain
the multiple degree of freedom system we will employ a similar (Mass-Spring) system as
in the SDOF, but with many such systems coupled together.
20

X,. X,. xt Xi.X^.X,
A i 1
i > >
/ T\M,
i >
M2m
AU J 1
c, ^ c,>
F
Kn
xn.xn, x
AC
->
F
Figure 2
By resolving the forces at each mass location, that is at each node, the equations
of motion for multiple degree of freedom system can be expressed as
>W0 + (C,+C2)^(0- C2X2{t) + (K{+K2)X^) - K2X2(t) = F,(0
M2X,(t)+(C+C3)X2(t) -C,.V,(0 -C3i-3(0 +^2+^)X(0 -2^,(0 -^3^(0= f2(0
(3-10)
Equation (3-10) lends itself to be expressed concisely, without any loss of information, in
the matrix form. Equation (3-10) can be expressed in the matrix notation as
[M]{X(t)}~[C]{X(t)} + [K]{X(t)} = {F(t)} (3-11)
21

Where
[M ] Represents the mass matrix of the complete system
[C ] Represents the damping matrix of the complete system
[AT] Represents the stiffness matrix of the complete system
{X(t)} Represents the displacement vector of the system
{^YO} Represents the velocity vector of the system
IX(t)\ Represents the acceleration vector of the system
{F(tj\ Represents the force vector of the system
For a multi-degree of freedom system discussed here the matrices will be
symmetric. However, the general form of the equation matrices may not be a symmetric
matrix due to node numbering and other modeling limitations in finite element
applications. Equation (3-11) in matrix form is a set of second order differential
equations. To solve equation (3-11) a few simplifying assumptions are normally made.
For example, if the structure is lightly damped, assuming [C] = 0 does not impact the
generality of the system!s dynamic behavior. For example, though damping of a system
reduces the peak amplitude of a response it has little affect on the natural frequency of
the model. Various simplifications reduce the overall complexity of a problem without
significant loss to accuracy. However, for greater accuracy of results, one should consider
the effects of damping on the system.
n

3.2 FEMatrix Solutions:
The solution of a non-symmetric system matrix requires considerable computation and
hence significant computer time. Dealing with systems with large degrees of freedom,
greater than 1000, that lack symmetry, consumes extensive computer resources. As
manipulations of diagonal matrices are very efficient, effort is made to reduce the matrix
to a diagonal form or a band matrix format. The narrower the band of a matrix, the greater
the efficiency, therefore greater the speed of the solution process.
Most finite element solvers reduce matrices to a diagonal form (or tri-diagonal
form) before attempting to solve the system equations. For dynamic systems the matrices
are partitioned and diagonalized to improve the efficiency of solution. Diagonalizing the
system matrices is done by employing modal coordinates. As modal coordinates posses
unique orthogonal properties, their application significantly reduces computation even
though it requires initial calculations to get the modal coordinates. The computer time
saved justifies the extra effort. The modal coordinate system produces new [M] and [K]
matrices that form new sets of equations which are more readily solved than equations
established in global coordinate system.
3.3 Eigenvalue Problem:
Using simpler notations for the equations using a subscript"n"
to denote an N-DOF
system; with C = 0 the equation ofmotion can be expressed as
23

MX(t) + KnX(t)= Fn (3-12)
The equation ofmotion for free vibration is obtained by equating Fn = 0; we get
MnX(t)+ KnXn(t)= 0 (3-13)
Simplifying the equation (3-13), (refer to equation (3-3), (3-4) and (3-5))
-<on2MnXn+KXn= 0 (3-14)
Which can be expressed as
[*,,-<o2My
= 0 (3-15)
The non-trivial solution is obtained by solving (3-16) which is also known as the
characteristic equation. The consise form of the charectaristic equation is illustrated as
= 0 (3-16)9
K-a-M
Solution of the determinant equation (3-16) gives the eigenvalues (co,2, co22, ...,
con") of the system in(rad/sec)"
and the square root of cof divided by 2rr. gives the
frequencies of the system in Hz. The knowledge of natural frequencies of a system is very
important as the system tends to have large amplitudes, if the operating speeds coincide
with the system frequencies. The first frequency of a system is known as the fundamental
frequency and often the most important frequency. For each eigenvalue we get a
corresponding unique eigenvector, which comprises of the relative displacements of
24

nodes of the system. This set of displacements of nodes for a particular eigenvalue
represent a specific mode shape. The eigenvectors are obtained by solving for Xn for a
particular value of con .
3.3.1 Eigenvectors Normalization:
There are two methods of normalization of eigenvectors
Maximum normalization and
Mass normalization.
3.3.1.1 Maximum Normalization :
The eigenvectors of a system that are obtained can be normalized by forcing the element
of the eigenvector with the largest magnitude equal to one and multiplying all elements of
the vector by the same factor. This method of normalization is called Maximum or point
normalization.
3.3.1.2 MassNormalization:
The more common method of normalization is mass normalization and it is more
involved than point normalization. This process is briefly described below. Assume an
eigenvector {w,-} that constitutes of the displacements of each node, then we have
{,}= {/. ": "/.-/. (3-17)
25

Performing the following matrix multiplication and assigning mt such that
"/-{"/['V/Hi/,} (3-18)
where [M\ is the total mass matrix,{uJT
is the transpose of eigenvector {,}. We obtain
mt, which is known as the normalized mass. To normalize the eigenvector (uj we divide
all of the elements of the vector {,} by
Jm~
.
3.4 Eigenvectors Partitioning and Correlation:
Let the eigenvectors obtained by finite element analysis and experimental analysis be [un]
and [ue], respectively. The eigenvectors calculated by the FEM analysis contains all six
(6) degrees of freedom for each node and the eigenvectors obtained through experimental
modal analysis generally have one (1) DOF. Therefore for lesser nodes than the
corresponding FE model, an experimental model consists of far lesser DOF. To compare
the analytical and experimental eigenvectors, the size of both data sets should be equal
and consists of displacements for corresponding nodes and DOF. To match the size of
eigenvectors between models, the FEM eigenvectors are partitioned to the experimental
eigenvectors size. The procedure to calculate the Cross-Orthogonality check is illustrated
below. Ifwe express a set of eigenvectors in generalized coordinates, we get
[u]= [<D] {q}
where {q} is the generalized coordinates of the system.
26

Analytical eigenvectors = [<t>] {q}
Experimental eigenvectors = [<D# ] [q]
(3-19a)
(3-19b)
The analytical eigenvector will have more rows, since it has larger DOF, versus
the experimental eigenvector. The analytical and experimental eigenvector"matrices"
comprising of eigenvectors for each mode will have the same number of columns, as the
number of modes being compared between the models is identical. Ifwe partition [ u ]
and represent it as
[u*]=
u
(3-20)
The size of \ua j corresponds to the experimental eigenvector set, and the number
of rows for \uo 1 will be equal to the analytical DOF minus the experimental DOF.
Using the relationship of eqn. (3-19a) in (3-20) we get
This implies that
and
[<E>-] =
[UaJ = [<DJ {q}
K] = [<DJ {q}
(3-21a)
(3-21b)
(3-21c)
27

and
KJ = [<t>0] {q} (3-21c)
It is our desire to obtain a transformation matrix [TmJ such that
[<*>] = [TJ [OJ (3-22)
As \T] will be used to obtain the reduced mass matrix (M^ ), which is needed to
perform the Cross-Orthogonality check. Both [<&a] and [OJ are used to obtain matrix
\Tm] as shown in equation 3-2 la and 3-22. As discussed earlier, the Cross-Orthogonality
check is an operation to compare analytical and experimental eigenvectors. The Cross-
Orthogonality procedure is discussed below.
We know that
L im x m \. im x n\. in x n\. in x m \-
J
Where the subscripts indicate the size of the matrices, the first subscript is number
of rows and second subscript is number of columns. If we desire to compare two sets of
eigenvectors generated through two different methods then we have using eqn. (3-23)
28

Where mi and m: are first and second (usually analytical and expeimental) method
respectively. If the eigenvectors generated by the two methods were identical then we
would have same result as in (3-23). Cross-Orthogonality can only be performed when
[Om/J and [O^jare of the same size.
Substituting [On] into eqn. (3-23) we have
t'L**'
[*n]Ln[M]nXn[*l*m (3"25)
Substituting [<J>] from eqn. (3-22) into eqn. (3-25) and expressing the equation
without the subscripts we get
Simplifying eqn. (3-26) we get
[']-Kfl^fMlWM] (3-27)
Note: The transpose of a matrix product follows the matrix multiplicationrule[20'
am)T=[B]T[4
We could express eqn. (3-27) as
29

[/]=[ou]r[,vraar][oa] (3-28)
Where
[Moor]=
fc.fMt7'"] (3"29)
Comparing experimental and analytical eigenvectors using eqns (3-24) and (3-28) we get
[Coot]=
[^flM-r] [<*>] (3"3)
It must be noted that the transformation matrix is very important for the Cross-
Orthogonality check and the accuracy of the transformation matrix is a major factor in
the quality of correlation results. To compute the transformation matrix it will be
necessary to determine the inverse of [ufl]. In general, [ua ] is a rectangular matrix. The
process of getting an inverse of a non-square matrix is known as the Pseudo-Inverse or
Moore-Penrose method.
Steps to calculate the Pseudo-Inverse are given in equations (3-3 1) to (3-34)
From eqn. (3-2 lb) we know that
K]=
[Oa]{q} (3-31)
Pre-multiply (3-31) with[Oa]T
30

[Oa]T[ua]=
[Oaf[Oa]{q}
Compute the inverse of [[Oa]T[<t>a]] which is expressed as
[[<t>aiT[<t>a]r*
(3-32)
(3-33)
Pre-multiplying eqn. (3-32) with eqn. (3-33) and we get
[[O/fOJj-'^f^j^lq}
where [[^J1^J]'1
[^a? is the Pseudo-Inverse of [<t>J
(3-34)
This implies that
[^]''=[[Oa]T[Oa]]-l[Oa]T
(3-35)
From (3-2 1c) we know that [uj=
[d>0] {q}, therefore substituting eqn. (3-34) into [uj we
get
Tr^ n-lr^ it
Let us denote
[uo]=
[O0][[Oali[Oa]]-1[Oa]1[ua]
DJB-[<i>j[[<i>jT[<i>a]rl[<i>jT
We know from (3-20) that [ u J
L"o J
(3-36)
(3-37)
Therefore substituting (3-37) into (3-20) we get
31

This implies that
K]
Pm ua
[Un)=
[Tm][ua] =
Dn
[Uo]
(3-38)
(3-39)
Where
M=
D,m
Once the transformation matrix is generated, the reduced mass matrix can be
obtained easily through eqn. (3-29) . The Cross-Orthogonality check can now be
performed with the experimental eigenvector [<t>e] as the sizes of [M,^] and [Oa] are
compatible for matrix multiplication. Refer to eqn. (3-30) for further details.
[Coor]=[OJT
[M^cD,]
3.5 Objective and Physical Significance ofEigenvector Partitioning:
As mentioned earlier, the FEM model generally has more degrees of freedom than
accelerometer locations on the experimental model. The accelerometer/excitation
^j.

locations on an experimental model are the DOF of the experimental model. Therefore, to
compare the modal characteristics between models, the size of corresponding matrices
containing modal data should be made compatible. The option employed in this thesis
was the eigenvector reduction method. The Cross-Orthogonality check was performed
using the reduced mass matrix. The Transformation matrix which was computed here can
also be used to expand the experimental eigenvector by pre-multiplying \Tm] to [OJ.
3.5. 1 CorrespondingNode Locations:
The corresponding grid / node locations between FEM and experimental models are
located using a spherical search routine developed by the author, and the displacement
DOF's of the FE eigenvectors that matched with the experimental model DOF's are
selected. The selected displacements from the FE eigenvectors are saved in the A-set
(Accepted set) and the remaining displacements of the eigenvectors are assigned to theO-
set (Omitted set). Details of the procedure are explained in chapter 7: The Summary of
COMPARE Program. The example problem in section 3.6 illustrates an application of the
procedure to obtain the transformation matrix, reduced mass matrix, and correlation
matrix.
jj

3.6 An Example problem: The example is an 8 mass 9 spring system shown in fig. 3
A k, Ei k, k3 E2 k4 k5 ^3 k6 k7..
.,
.
, :8 K9 v
/J\rmi
-A/-
m?J\-
m3-A/-
^4-A/-
m5 ^V m6-A/-
m?-A/-
m3"A/-^
F, 3 F4 F< F7
Figure 3
The values ofmass and stiffness are
m,= 2.5, m2
= 3.8, m3= 5.0, m4
= 3.0, m5= 5.9, m6
= 7.0, m7= 3.0, ms
= 4.9
k, = 1 .0, k2= 3.0, k3 = 9.0, k4 = 1 1 .0, k5
= 7.0, k6= 5.0, k7 = 6.0, ks
= 4.0, k9= 8.0
The solution details for the example problem, 8 mass 9 spring model, are given in
appendix 3. The system's solution was obtained using MAPLE V and the transformation
matrix, reduced mass matrix, and correlation (Cross-Orthogonality) were generated
through Microsoft - Excel (5.0). The 8 mass - 9 spring model has a total of eight (8)
modes, but only the first four (4) modes of the analytical and experimental models are
being compared. The motion of the masses is restricted to along the longitudinal axis
onlv.
The experimental documented data is for four (4) modes, the accelerometer/
excitation locations are E,, E:, E3, and E4 that correspond to the FE nodes F,, F3, F5, and

F7 respectively. The DOF of both systems is in X direction. The system matrices and
eigenvectors are
The mass matrix for the analytical solution
1 2 3 4 5 6 7 8
Wn\ =
2.50 0.00 0.00 0.00 0.00 0.00 0.00 0.00
0.00 3.80 0.00 0.00 0.00 0.00 0.00 0.00
0.00 0.00 5.00 0.00 0.00 0.00 0.00 0.00
0.00 0.00 0.00 3.00 0.00 0.00 0.00 0.00
0.00 0.00 0.00 0.00 5.90 0.00 0.00 0.00
0.00 0.00 0.00 0.00 0.00 7.00 0.00 0.00
0.00 0.00 0.00 0.00 0.00 0.00 3.00 0.00
0.00 0.00 0.00 0.00 0.00 0.00 0.00 4.90
The stiffness matrix for the analytical solution
1 2 4 5 6 7 8
[Kn\ =
4.000 -3.000 0.000 0.000 0.000 0.000 0.000 0.000
-3.000 12.000 -9.000 0.000 0.000 0.000 0.000 0.000
0.000 -9.000 20.000 -11.000 0.000 0.000 0.000 0.000
0.000 0.000 -11.000 18.000 -7.000 0.000 0.000 0.000
0.000 0.000 0.000 -7.000 12.000 -5.000 0.000 0.000
0.000 0.000 0.000 0.000 -5.000 11.000 -6.000 0.000
0.000 0.000 0.000 0.000 0.000 -6.000 10.000 -4.000
0.000 0.000 0.000 0.000 0.000 0.000 -4.000 12.000
J3

Eigenvectors for the analytical solution
DOF/
Modes
CD, d>2 03 d>4 5 <t>6 o7 <>8
[<*>] =
1 0.1583 -0.2336 0.4179 -0.2984 0.1865 -0.0770 0.1251 -0.0197
2 0.2008 -0.2031 0.0756 0.0984 -0.1355 0.1827 -0.3181 0.1154
^
j 0.2075 -0.1468 -0.0830 0.1478 -0.1012 -0.0735 0.1585 -0.2566
4 0.2048 -0.0635 -0.1604 0.0542 0.0402 -0.1348 0.2135 0.4397
5 0.1932 0.0806 -0.1873 -0.1392 0.2198 0.0254 -0.1255 -0.0809
6 0.1587 0.2321 0.0811 -0.0834 -0.1685 0.1185 0.0883 0.0083
7 0.1139 0.2097 0.1737 0.1560 -0.0046 -0.4201 -0.2130 -0.0036
8 0.0394 0.0901 0.1330 0.2808 0.2489 0.1722 0.0789 0.0003
For the 4 modes of interest we get a 4 column matrix.
Modes 1 2 3 4
[3>n] =
DOF
1 0.1583 -0.2336 0.4179 -0.2984
2 0.2008 -0.2031 0.0756 0.0984
3 0.2075 -0.1468 -0.0830 0.1478
4 0.2048 -0.0635 -0.1604 0.0542
5 0.1932 0.0806 -0.1873 -0.1392
6 0.1587 0.2321 0.0811 -0.0834
7 0.1139 0.2097 0.1737 0.1560
8 0.0394 0.0901 0.1330 0.2808
We know from figure 3 that the analytical DOF (F(, F3, F5, F7) correspond to the
experimental DOF (E[, E2, E3, E4). Therefore we have the analytical eigenvectors that
correspond to the experimental DOF.
36

A-set:
Modes 1 2 3 4
m=
DOF
1 0.1583 -0.2336 0.4179 -0.2984
0.2075 -0.1468 -0.0830 0.1478
5 0.1932 0.0806 -0.1873 -0.1392
7 0.1139 0.2097 0.1737 0.1560
O-set: The remaining DOF
Modes 1 2 3 4
[Ool=
DOF
2 0.2008 -0.2031 0.0756 0.0984
4 0.2048 -0.0635 -0.1604 0.0542
6 0.1587 0.2321 0.0811 -0.0834
8 0.0394 0.0901 0.1330 0.2808
This example is just meant to illustrate the procedure of Cross-Orthogonality
check. Therefore, assume for this illustration that the experimental DOF (Eb E2, E3, E4)
corresponding to the analytical DOF (F1; F3, F5, F7) have identical displacements, hence
the experimental eigenvectors are the same as A-set. The experimental eigenvectors were
created using analytical data.
Experimental data: Same as the A-set
Mode 1 2 3 4 Acc.loc
[<De] =
DOF | |
E, 0.1583 -0.2336 0.4179 -0.2984 F,
E, 0.2075 -0.1468 -0.0830 0.1478 F;
E3 0.1932 0.0806 -0.1873 -0.1392 F5
E4 0.1139 0.2097 0.1737 0.1560 F7

For detailed calculations refer to Appendix 3. Using eqns (3-31) to (3-37) we get
[Dm], therefore augmenting [Dm] with [ I ] we get the transformation matrix. Refer eqn.
(3-39).
fc.] =[']
[*o\[*a]T[*a]ll[**]7
Transformation matrix:
[Tm] =
1.00 0.00 0.00 0.00
0.2549 0.9361 -0.204 0.0492
0.00 1.00 0.00 0.00
-0.053 0.6783 0.3992 -0.041
0.00 0.00 1.00 0.00
0.1345 -0.386 0.7031 0.7164
0.00 0.00 0.00 1.00
-0.139 0.3698 -0.509 0.7288
The reduced mass matrix is calculated using eqn. (3-29), that is
[Maar]=\[Tm]T
[^n\Tm]
Reduced Mass Matrix:
[Mw] =
2.9771 0.1826 0.7481 0.2315
0.1826 11.422 -2.736 -0.523
0.7481 -2.736 11.267 1.6215
0.2315 -0.523 1.6215 9.2095

We know that Cross-Orthogonality check is [Q^. ] = [<be] [Maar\a] ,see eqn. (3-30)
Cross-Orthosonalitv Check:
[Coor] =
1.000 0.000 0.000 0.000
0.000 1.000 0.000 0.000
0.000 0.000 1.000 0.000
0.000 0.000 0.000 1.000
The resultant correlation matrix is an [I] matrix since the experimental data was
assumed to be identical to the analytical data (A-set). Therefore, no mismatch existed
between both sets of data. However, for actual experimental data which is different from
the analytical data the correlation matrix [Coor] will contain non-zero off-diagonal
elements and the diagonal elements will indicate the level of similarity between the
experimental and FEM data sets (models). The results at each step of the COMPARE
program matched well with the example illustrated here.
A ninety-nine (99) node FE model was correlated with a fifty-five (55) node
experimental model for eight (8) modes by COMPARE. The results of COMPARE were
validated by comparing to Cross-Orthogonality check performed on the same data by
Derek Krebs in his thesis (see reference 7). The results demonstrated byKrebs7
and
COMPARE showed excellent agreement, which verified the accuracy of program
COMPARE.

Chapter 4: Experimental Modal Analysis
4.1 Background:
Historically experimental modal analysis was performed to provide the dynamic character
of a system, mainly eigenvalues and eigenvectors. Very little emphasis was placed on
utilizing the experimental data in validating the analytical model. Each analysis process,
analytical and experimental, was performed separately without deriving any benefit from
the contributions of other. Their approaches were viewed as distinct and disunited, but
with the recognition that each field though distinct can make notable contributions to a
common goal resulted in increased cooperation. Many procedures to correlate the
experimental and analytical data were investigated and have made rapid progress possible
in design and development, and lead to the development of the field of design validation.
In the last 20 years with this recognition among design engineers that
experimental and analytical modal analysis can complement each other, accelerated
development by bringing attention to design errors at an early stage of development. The
evolution and progress of correlation techniques lead to the development of procedures
that improved correlation between models, and that resulted in model tuning. This
partnership has been a hallmark in the field of design and development.
40

4. 1. 1 Application ofExperimentalModalAnalysis (EMA) :
The major application of experimental modal analysis is to obtain the natural frequencies
and mode shapes of a model in order to predict the behavior of a model under different
loading conditions. EMA can also be used to obtain damping properties of a model which
is helpful in developing realistic FE models. EMA helps document the model's behavior
and facilitates in capturing the model's negative responses during initial stages of
development. This significantly reduces design-test iterations. Mainly due to the benefits
of cooperation between analytical and experimental analysis, the amount of reliability-
testing required for product introduction has reduced significantly. By predicting and
eliminating potential defects in a system, the focus ofreliability-
testing has been limited
to critical functional areas that impact human safety. Most current modal analysis
software support the process that also predicts model's behavior subject
to modifications.
4. 1.2 Correlation :
The correlation process for comparing experimental and analytical data is no longer
limited to matching numbers of the data sets, but it has made great progress in its
presentation of results. The field of correlation has developed powerful methods of data
verification and has provided basis for the development of model tuning. The
Sub-structuring means modification of the model by adding or removing elements
41

development of procedures and the increased application ofmodel tuning has contributed
considerably to design optimization.
4.2 Frequency ResponseAnalysis:
If a system is excited by an input of a known set of frequencies then the output consists of
the same set of frequencies, but with a change in amplitude and phase depending on the
system properties. The characteristic change between input and output reflects the
system's uniqueness and is called the Frequency Response of the system. Understanding
the frequency response of a model assists in predicting the behavior of the model under
many operating conditions. The knowledge of the model's Frequency Response Function
(FRF) can be used to modify the model to eliminate unfavorable responses. There are
different types of excitation methods to get the FRF of a system, such as:
- Transient excitation, usually performed by exciting a model using a modal
hammer.
Shaker excitation which as the name suggests use an excitation shaker and the
types of force input can be varied from random wave to sine wave excitation.
4.2. 1 Single Degree ofFreedom System :
The differential equation ofmotion for a single degree of freedom system is
MX(t) + CXft) + KX(t)= F(t) (4-1)
42

Applying the Laplace transformation to equation (4-1), we get
(Ms:
-Cs^K) X(s)- MX(0) - MX(0) -CX(0)
= F(s) (4-2)
For the initial conditions X(0) = 0 and X(0)= 0 equation (4-2) can be written as
[Ms2+Cs~K)x(s)
= F(s) (4-3)
Let B(s)=(Ms2
+
Cs^K) and H(s)=(Ms2
+ Cs - .
H(s) is known as the transfer function or the FRF. Equation (4-3) becomes
X(s) = H(s) F(s) (4-4)
This implies that
H(s)= ^- (4-5)
F(s)
Substituting F(s) from (4-3) and dividing byM gives
m'
s>
+ iSs -
(ft,)<>
Setting the denominator to zero results in the characteristic equation whose roots are the
eigenvalues of the free vibration problem. The roots of denominator of equation (4-6)
are
Kz=-{CA.u)iCA.u)2-{%) (4-7)
43

C i KSetting =
2 and co'n=
,we can express equation (4-7) as
Mco'
M
Au =
-QcDn con 4? - I (4-8)
For an under-damped system C, < 1, then the term under the radical in equation (4-8)
becomes imaginary. We can write equation (4-8) as
Xlz = cr icod (4-9)
where a =
-<> . Let cod=
con -y/l-
l
, u)^ is known as damped-natural frequency.
The denominator of equation (4-6) can be expressed in terms of the roots A.! and X2 so
that
H(s)=
7 T7 7= /JT 7 (4-10)
(s-AtXs-Az) (s-A^s-A))
where is the complex conjugate of X, ( see equation (4-9)).
4.2.2 Residues:
The transfer function can be expressed in the partial fraction form as
H(s)7 Wr^TT (4-11)
where At and A^ are called the residues of the transfer function.
44

From equation (4-10) and (4-11) we get
</u=
A,(s-X\)+A;(s-1,) (4-12)
The value ofA / and A*t are calculated at s=
X, and s =
A,"
respectively.
If we substitute s = ico into equation (4-11) along with values ofAj and Aj then
we get the Frequency Response Function (FRF) of a system. This predicts the response of
a system for a harmonic force of frequency co acting on the system.
4.2.3 Multi-Degree ofFreedom System :
Employing matrix notation for a multi-degree of freedom system and following the steps
similar to a SDOF system gives the system equations. Though the complexity of
equations for a MDOF system is greater they follows the same procedures as SDOF
system yielding
[M]{X(tj\-
[C]{X(t)}-
[ K]{(X(t)} ={F(t)} (4-13)
Taking the Laplace of equation (4-13), with the initial conditions {X(0)) = [0] and
{X(0)\= {0} and {C}
=
{0} ,we get
[s:(M]-
[KJJ (X(s)} =
(F(s)j (4-14)
45

For simplicity let
[B(s)J = [s2[M] -r [K]] (4-15)
Then equation (4-15) is
[B(s)J {X(s)j = (F(s)} (4-16)
[B(s)] is called the system impedance matrix. The elements of matrix [B(s)] are
bij=
m,/+ ktj (4-17)
Ifmatrix [B(s)] is non-singular, then
[B(s)T'= [D(s)]/\[B(s)]\ (4-18)
[D(s)] is the adjoint matrix. It can be shown that [D(s)] evaluated at the pole, is
related to the mode shape corresponding to that particular pole. The inverse of [B(s)j is
the transfer matrix of the system.
[H(s)j=[B(s)T'
(4-19)
The characteristic equation is obtained by setting the denominator of eqn. (4-18)
to zero. The roots of this equation are Xu X2, . . A^ . The characteristic equation can be
expressed as the product of the roots of the characteristic equations.
'[B(s)]\ =E(s- Xj)(s -^....(s-AJ (4-20)
where E is a constant.
46

Pre-multiplying equation (4-16) with [H(s)] gives
(H(s)J (F(s)}= {X(s)j (4-21)
This basically represents the total behavior of the system given an input force yielding a
corresponding displacement vector. The expanded form of the equation (4-21) is
'Hu(s) Hn(s) - HJsj
Hn(s) H22(s) :
HJs) Hnn(s)
rwi \Xi(*)]< . = .
X2(s)>
Iw. **(*).
(4-22)
This represents '/i'
equations written individually as
H(s) F,(s)- + Hln(s) Fn(s) =
X,(s)
H21(s) F, (s)- -
H2n(s) FJs) =
X:(s)
*
hjs) Fj(sj + -
/fm^ /=>; =
xjs)
If Fj= 0 for all i * 1 then
*.- (s)H.,(s)
=;
for all j= 1 ton
;
/^
Equation (4-24) can be generalized to all degrees of freedom as
M /)XP(S)
Hpq(s)= -
Fq(s)
where Xp is the response at point "p", and Fq is the force input at "q".
(4-23)
(4-24)
(4-25)
47

Equation (4-25) implies that a column ofmatrix Hpq can be obtained by measuring
the response at various points"p"
while keeping the point of excitation"q"
fixed. This
expressed in terms of experimental data acquisition is known as roving accelerometer
measurement. The roving excitation technique is a method for data acquisition in which
the accelerometer is fixed but the excitation source is moved to various points. The
roving excitation technique is easier than the roving accelerometer technique when a
hammer is used to excite a system. However, the roving accelerometer method is
preferred when shakers are used to excite a system.
For a system with no damping we use s= ico, and the matrix H(s) transforms into
the frequency response form H(ico). For a system with damping s = a + /co. Damping
affects the nature of response, such as a decrease in amplitude, but the characteristic
nature of the system remains same. With damping the solution of the characteristic
equation consists of conjugate pairs as"s"
is a complex term.
Note: According to Maxwell's reciprocity theorem, a structure excited at point"p"
and
the frequency response measured at point "q", will have the same frequency response if
the structure were excited at point"q"
and response measured at point "p". This implies
that Hpq= Hqp, this relationship is of significant importance in experimental modal
analysis as it lends to efficient data acquisition. The benefit ofMaxwell's relationship is
that one complete row or column of the FRF matrix is sufficient to generate the
48

remainder of thematrix1"1
It also makes the rapid data acquisition possible by keeping
the accelerometer fixed and moving the excitation force (hammer) to various nodes
which otherwise would have required the tedious procedure ofmoving the accelerometer
point-to-point.
4.3 Curve Fitting:
Frequency response data after it has been captured, has to be processed further to give
frequencies, damping properties, and residues of the structure. Curve fitting is used to
determine mathematical expressions that represent the digital FRF data obtained by the
analyzer. The data has to be curve fitted for the software to determine the modes,
frequencies, and other structural characteristics of the experimental model'221. Therefore,
curve fitting must be performed before the software presents any results or display other
features of the model.
Curve fitting plays a critical role in modal analysis and impacts the quality of
mode shapes display. Care must be exercised while curve fitting such that only points of
interest are captured and stray data should be filtered out. In the vicinity of a resonance
frequency, the response of a system is dominated by the resonant behavior of the system.
The residue of a resonant element (sub-system) calculated for a frequency will be much
greater than other residues of the system, calculated at that frequency.
49

From equations (4-18) and (4-19) [H(s)] = [D(s)] / 1 [B(s)j | can be expressed as
L J505"+
B,Sn-1
+ +BnS
The equation can be factored to give the system's residues, the factors will be present in
conjugate pairs (see equation (4-1 1)) giving
[H(S)]= f Ak+ Ak. (4-27)L n {(s-iXk) (s + iXk)
Most modem modal analysis software consider the effects of adjoining modes
while curve fitting thus increasing the accuracy of modal behavior predictions. For
further information on curve fitting see reference [15] on modal analysis and curve
fitting.
4.4 Practical Considerations:
During data acquisition care must be taken to ensure that good quality data is obtained.
There are various process limitations of an analyzer that may corrupt the data, hence an
operator should be knowledgeable of the various limitations and features of an analyzer
and its effects.
50

4.4.1 Aliasing:
The continuous time history of the wave is being captured by an analyzer through discrete
points. During this process of discretization a wave of high frequency can be recorded as
a low frequency wave. This phenomenon occurs when the analyzer discretization
frequency is low and / or the frequency of the signal read is beyond the range of the
analyzer. The maximum frequency range of the analyzer for effective data acquisition is
co,/2 where cos is the discretization frequency. The fix to this problem is either increasing
the discretization frequency or incorporating an anti-aliasing circuit.
4.4.2 Leakage:
Leakage is a problem that arises due to the assumption that the data captured in a time
window is periodic. If the window of capture truncates the signal, then the resultant
transformation of the signal in the frequency domain contains a spread of spectral lines
close to the true frequency. This is called leakage and the problem can be fixed through
windowing. There are different types of windows such as Rectangular, Harming, Cosine
Taper and Exponential, each window is suitable for specific applications.
4.4.3 Hammer Tip:
The frequency content of an impact is effected by the type of the hammer tip used. Care
must be taken such that the tip used is appropriate for the application at hand. Use a steel
51

tip for high frequency content above 2000 Hz, plastic tip for the range 500-2000 Hz and
the rubber tip for frequencies below 500 Hz.
4.5 ExperimentalModalAnalysis ofa Plate model:
Experimental modal data was documented for a10"
x7"
x1"
aluminum plate at 25 node
locations. The data was collected for free-free boundary conditions using the roving
excitation method (with accelerometer fixed at node # 25, see figure 7 in Appendix 5).
The plate was placed on a2"
foam to simulate free-free boundary conditions and the DOF
of excitation and response for each node was in Z direction. A steel tip hammer was used
to excite the system and the average of five responses per data point were collected. The
coherence (quality of impact / excitation) ofhits was good for all documented data points.
The SMS-STAR file and mode shape plots are documented in Appendix 6.
A similar model was analyzed in SYSTUNE (a commercially available package
that performs sensitivity analysis) and the data file and mode shape plots are documented
in Appendix 7. A NASTRAN analysis was also performed for the plate and the data file
and mode shape plots are documented in Appendix 5. The result, mode shapes and
eigenvalues, among the three methods used showed close match indicating well
documented experimental data and good analytical models.
52

4.6 Testing Pitfalls:
Modal analysis is a very interesting but challenging activity. It provides engineers with
data of significant importance and also provides the graphical display of data for
evaluation. Along with its major advantages there are some very significant pitfalls that
for most part can be easily reduced, if not totally eliminated, by taking some precautions
before and during the data acquisition.
Certain items on the list are specific to the equipment used by the author. Namely,
Bruell and Kjaer (B&K) Signal analyzer (Model # 2032), B&K Hammer (Model # 8202),
B&K Charge Amplifiers (Model # 2626 ), B&K Accelerometer (Model # 4369).
1) Ascertain all instrumentation is calibrated and functioning properly.
2) Ascertain the cables are in good condition. The wires should not be exposed and the
shielding should be intact.
3) Cables should be securely fastened to the instruments, and cables should be taped
down to avoid secondary excitations due to wire-motion.
4) Make sure the accelerometers are mounted such that they are aligned in the intended
direction, and not at an angle as this corrupts the data. The accelerometers should be
securely fastened to the structure, and without gaps or too much bee's-wax.
5) During data acquisition of a free-free state, make sure that the structure supports have
minimal stiffness in the direction of motion. Hang the structure using long bungee
53

cords or hang the structure with strings perpendicular to the direction of interest. If
only a single DOF motion is to be documented for light structures, then the structure
could be placed on foam.
6) Ascertain that the natural frequencies of the supporting structure are not in the range
of test frequencies, as the supporting structure's response will corrupt the data. This
type of interfering data can give very misleading results.
7) When using the hammer during impact testing, make sure the hits are at the same
location on the structure and the impact is consistent. Be very careful and avoid
double hits. Average the data, take the average of at least five (5) recordings.
8) It is very important that the operator does not accept data in the event of doubt. It is
better to carefully repeat the data in question.
9) Do not overload the signal analyzer, as the signal gets clipped. Be sure to re-calibrate
the internal sensitivities (input-autorange) the analyzer whenever it overloads.
10) Set the charge amplifier settings in accordance to the specification sheets provided
along with the accelerometers, the hammer, etc.
11) Set the charge amplifier gain such that the 20 dB light is visible at each data
acquisition, but the overload light does not get turned on.
54

ChapterS: Correlation Techniques
5.1 Background:
Generally the volume of results generated by finite element analysis is very large. To
process this data, the resources and time required can be overwhelming. The task of data
evaluation is simplified largely due to the availability of modern post-processing
techniques. Post-processing techniques generally involve graphical display of the results,
static or dynamic. For modal analysis, dynamic display assists the engineer in
deciphering the results, but for comparing results among different iterations or comparing
results with experimental data, even this powerful tool sometimes falls short.
The graphical display capabilities of computers empower engineers to"see"
the
results and have been instrumental in attracting many users to the finite element method.
In addition, the ability to make minor modifications and visually observe the subsequent
changes in the model's behavior has significantly reduced design cycle time. During
design iterations it is prudent to confirm analytical results with experimental data as this
gives credence to the analytical results. The availability of correlation procedures has
provided the ability to easily compare the results of the finite element and experimental
models. Good correlation raises the level of confidence in the finite element results.
:>:>

Most design and development procedures start with modifying an existing product
to obtain an improved performance or desired behavior. The model to which
modifications are made should be a close representation of an existing product, lest the
final results may be misleading. The effort spent in correlation is time well spent in light
of the consequences of faulty results. During model validation the finite element modal
results are matched with experimental modal data of the model. This validation procedure
requires significant data manipulation and computation, which usually is too complex to
be performed manually, and demands the use of a computer. Though easy-to-use
computer programs are available nowadays to perform the task of model correlation, a
thorough understanding of the underlying basics is essential.
5.2 Correlation Techniques:
Various correlation techniques are discussed in the following section, such as:
Visual comparison
Mode Shape Difference
Modal Assurance Criteria (MAC)
Coordinate MAC (COMAC)
Mass Cross-Orthogonality Check
56

5.2.1 Visual Comparison:
The Visual comparison technique involves the simultaneous display of the analytical and
experimental mode shapes for a specific mode. This method though seemingly simple
gets quite complicated as the complexity and DOF of the models increase. The Visual
comparison method is most suitable and widely used for simple and small structures. It is
easy to use and a means to validate a small model's analytical results quickly. The
various options ofvisual comparison are:
Split display in which a specific mode, analytical and experimental, is
displayed side by side.
Superimposed display in which a specific mode is displayed by superimposing
the analytical model's mode shape on the experimental mode shape.
5.2.2 Mode ShapeDifference:
The difference in modal displacements of analytical and experimental modes for each
DOF is calculated and the modal difference is displayed (animated). If the modes,
analytical and experimental, are replicated then the resultant mode shape difference will
be zero. However, for those nodes where a difference exists, the display highlights the
disparity in modal displacements. The modes being compared must have eigenvectors of
the same size (DOF) and must be normalized in the same manner (mass / point
normalization). The mode shape difference is calculated as follows
57

Note: The phase of the mode shapes being compared should be same, lest the calculation
of the modal displacement difference may result in the addition ofmodal displacement.
5.2.3 ModalAssurance Criteria (MAC) :
Modal Assurance Criteria is the most common method employed to compare
eigenvectors between models. The MAC gives an estimate of the difference in
eigenvectors and the MAC value spans between zero to one. A MAC value of one
indicates the eigenvectors are well correlated, i.e., identical eigenvectors, any value lower
than one indicates the level of discrepancy between eigenvectors of the models. Though
the MAC indicates the level of correlation between the eigenvectors, it does not give any
indication of the location of the discrepancy. The method of calculating the MAC is
illustrated in the following equation
M4C{ {*},,{*,})-
{*.}>},
{}>.}> {*!>*}(5-2)
The correlation equation (5-2) expresses correspondence between the jth mode of
first data set { Oa} and the kth mode of second data set { O^j. Application of (5-2) to
the modal matrices consisting of eigenvectors results in a MAC matrix. If two vectors are
58

identical, the MAC will equal unity. If two vectors are orthognal the MAC will be a small
number, but not zero unless the mass matrix is an identity matrix.
Note: While performing the calculations for MAC between two vectors, compute the
square (in the numerator) after computing the modulus of the vector product. Performing
computations in any other manner may lead to wrong results. The normalization of the
eigenvectors does not effect the MAC value as the effects of normalization in numerator
are canceled due to the effects of normalization of the eigenvectors in the denominator.
5.2.4 CoordinateModal Assurance Criteria (COMAC) :
The coordinate MAC is used to quantify correlation of modal displacement for a given
DOF over a range ofmode shapes. This method of correlation points to the difference in
modal displacement for each DOF of the model being compared. However, mode shape
pairing should be done prior to performing the COMAC. The equation for the COMAC is
1 1 {*-}{*'-} rCOMAC0)
-
-^ j (5-3)
n=l n=l
where N = Max. number of mode pairs, n= Increment of mode pairs, and i = The DOF
being compared.
59

Note: If either j <t>^ j or j 0'n6 1 is equal to {o} ,then COMAC(i) will be set to zero.
5.2.5 Cross Orthogonality Check:
The mode shapes of a system possess a unique characteristic known as orthogonality.
This property is crucial in determining the uniqueness of eigenvectors. Most often the
orthogonality check is performed on the mass matrix [M], but it can also be performed on
the stiffness matrix [K]. If the eigenvectors are of unequal size, then further procedures
are required to make the eigenvectors suitable for the orthogonality check. Detailed
discussion of Cross-Orthogonality Check procedure is documented in section 3.4 of
Chapter 3: Theory.
60

Chapter 6: Sensitivity Analysis
6, 1 Design Sensitivity Background:
The change in response for known changes in parameters is the basis of all sensitivity
analysis studies. There have been significant developments in the field of sensitivity
analysis during the 90s due to increased focus in the area of optimization. The
development of sensitivity analysis got a new life due to development of modern
equation solvers and development of more efficient techniques to obtain the system
derivatives, required for sensitivity analysis.
Most often there are differences between experimentally documented modal
parameters and finite element modal results of a model. These differences could be due
to many practical reasons such as
Non-homogeneous material, for analytical purposes material is assumed to be
homogeneous; however, in real life true homogeneous materials are rare.
The structural dimensions used for analytical calculation are assumed to be
uniform, but seldom that holds true due to manufacturing tolerances.
The inability to duplicate theoretical boundary conditions, etc.
Therefore the FE model has to be modified to better correlate with the
experimental model. Model validation furnishes a tool to capture modeling errors. After
61

the validation process the model may be subjected to further complicated analysis with
increased faith in the results, provided good correlation exists between the analytical and
experimental models. It is recommended to perform model validation prior to any major
analysis, lest the validity of the final results be challenged due to the lack of faith in the
model. The procedure of tuning a model to reflect an experimental model is commonly
applied today, and has contributed considerably to the new field ofDesign Optimization.
6.1.1 Design optimization:
Design optimization coordinates the benefits of both design and analysis. Analysis is the
process of determining the response of a specified system to its environment; however,
design is the definition of a system which will be able to support a prescribed set of
conditions. With the availability of powerful tools to perform design and analysis the
next logical step is to find the best solution to the prescribed conditions, instead of earlier
efforts of finding a solution to prescribed conditions. The process of finding the best
solution to a set of prescribed conditions is called Optimization.
The key for the optimization process is in predicting the change in response of a
structure subject to changes in parameters. The response-parameter relationship forms
the basis for evaluating various parameters that need to be modified to get the desired
design. This relationship of change in responses and parameters is termed as sensitivity.
With the knowledge of sensitivity, engineers can make a knowledgeable decision of
62

modifying parameters of a model which will efficiently produce the desired results. The
methods developed on basis of sensitivity analysis has given structure and direction to a
field which existed for a long time on "trial and error".
6.2 Sensitivity Coefficients:
Design Sensitivity is formally defined as the calculation the of response (constraints)
derivatives with respect to design variables. Constraints are defined as the structural
response quantities such as stress, displacement, force, frequency, etc. Design variables
are such functions as element thickness, area, thickness ofwebs, etc.
6.2.1 Static Derivatives:
Let Y, be a design response which is a function of V design variables bj andg'
displacement variables uk.
This implies that
Yi (bx, b2 br. ux, u2 ug)= Y/bj, uk) (6-1)
where / = /, 2, 3 s ; j= 1,2, 3 r ; k = 1, 2, 3 g
The response relationship can be expressed as
Y,=
Y, (bj. uk) < 0 (6-2)
Subject to bj<
bj<
b"
and u[<
uk< uk. Where bj and u[are the lower limits
andbu
andu"
are the upper limits.
63

The derivative ofY, can now be expressed as follows
'db'
\db, db, dbrdb.
dY dY, dY,
du, du-, dukv. ' j
dux
dut
(6-3)
Note: dbj and db: are dimensionless quantities that denotes a change with respect to bj
The equation (6-3) can be expressed in a simpler form as
T
dY, =
db,. K! ?m w (6-4)
If the displacement vector is a function of b3 design variables, then {duk} can be
expressed as
where
{<*"* )"
dvk
db,K) (6-5)
du, cu, cu,
cuk
db. cb: dbs
i3bJ.dug dus duzdb, db. dbr
(6-6)
64

Thereby equation (6-4) can be expressed using (6-5) and (6-6) as
T . i
dY =
dY
db4 Wdw,.
#>y
.
K) (6-7)
The equation (6-7) can be expressed as
dY. = 5z^
L5^
w (6-8)
If we establish the relationship for several responses changes dYn that are
functions of idb} } and express them in matrix / vector format, we get
K}-
f r ,r
dYA
dut
dudb. K) (6-9)
Denote the matrix on the RHS of eqn. (6-9) as
dY\ dY
db , CUl
CUu
where [ S ] is known as the Sensitivity matrix.
(6-10)
65

If dY, is the difference between the desired response of a model and the response
of an analytical model, we could establish a vector {dYn}ax\d compute (dbj\to update
the analytical model. From eqns (6-9) and (6-10) idbj \ is determined from
{dbj}=
[SYl{dYn} (6-11)
Thereby the parameters b,of the analytical model can be updated by respective db. as
b= b}. ( / + dbj ) (6-12)
6.2.2 NormalModes - Eigenvalue Derivatives:
If we assume that each entity of the characteristic equation of motion, eqn.(3-15), is a
function of the design variable bj, then we can express equation (3-15) as
'K(bj)] {<S>(bj)} - X,(b}) [M(bj)\ {tybj)}= 0 (6-13)
Differentiating equation (6-13) with respect to bj and simplifying, we get
4*idb, W-^W'|MW-[^^f|
(*->
Pre-multiply equation (6-14) with {O} . This results in
- W& {.}-
>-, W^ {>,} -&W [M] {,}-
frflK-xJ^(6-15)
66

But,
and
{o,}r[[*]-x,Lw]]= {0}
m,=
(0,)r[W]{0,)
(6- 16a)
(6- 16b)
Therefore, substituting eqns.(6-16) in eqn.(6-15) and dividing both sides by /w, yields
{<M (6-17)*l.
{*lV4M . h. {*y*Mdbj m, dbj m: db,
Equation (6- 1 7) can be represented in first order variation
i\b m Ab, m: Ai>.{$,} (6-18)
For mass normalized eigenvectors mt= 1.0. Therefore, eqn (6-18) can be further
simplified which results in the form given below.
AX, /
Abj (Abj){0,}r[AK]{0;.} -
A,{0>,}r[A,l/]{O,} (6-19)
If the frequency derivative is of interest instead of the eigenvalue derivative, then
dfd\;
5*7,(6-20)
where A. =a'
=4z'f'
67

6. 2.3 Normal Modes - Eigenvector Derivatives:
The eigenvector derivatives are obtained by differentiating equation (6-13) assuming the
eigenvectors as variables of bj. The procedure is too involved to be explained here, but
the mathematical formulation (procedure) of eigenvector derivatives is documented
below. For further elaboration, refer to Richard B. Nelson's paper*31.
We have assumed in section 6.2.2 that the model's responses are functions of the
variable bj. From eqn. (6-13) we have
\K(bj)\-X{bj)\M(bj)\{^(bj)Y 0
Rearranging equation (6-14) we get
\K\-X\M\ Ob,
dK
db,
dX
dbL[M]-K
dM
db,{*,} (6-21)
Expressing (6-21) in the perturbation format, for Abj we get
tt'l-^MJ^-1-AK
Ah,
AX,
A6T[M]-\t
AM
LAbj
{<&,} (6-22)
From equation (6-18) we have
Ab, m. {*,r^K}-^{*,}r^K}Ab,
68

Ifwe assume that \ '-\ is a weighted sum of the eigenvectors of the system. We have
Abj
^4-iM*.}Ab
j J *-/
(6-23)
where k = mode number, n=
DOF, Ek=
arbitrary constant.
Equation (6-23) can be expressed as
AO,.
AA,-4{*/}
+ IM**}k-l
(6-24)
where Bk=
Ek when k * i and Bk=
Ek - A, when k= i.
Ifwe define { V\ ) such that
U} = IM<MA=/
then we can express eqn. (6-24) as
(6-25)
AcD,
Ab,
= 4{<J>/}+ {Vi} (6-26)
Substituting (6-26) into (6-21) we get
69

tt*]-M.wfl{-U<M+{r,}}-JX
~db*-[M] + KdM
[dbA-
dK~\
[dbJ \\{<D,} (6-27)
Since [[ K] - X, [ M]] [ <t>, }
= 0 we can simplify eqn. (6-27) as
[[Ar]-x,[w]]{r,}-dX
~db '-{M] + X,dM
[dbj\-
~
dK~\
idbA\{*,} (6-28)
We could get { Vi } easily if matrix [[ K] - A, [ /V/j] were non-singular, but the
norm of the characteristic matrix[[ k\ -Xt [iV^l is (n-1) requiring further manipulations to
get {V,}.
We know that eigenvectors can be scaled once a component of the eigenvector is
fixed to an arbitrary value. If we assume thek*
component of { Vt } is zero, that is
Vt =0, and the corresponding term (AT- X ;M)^.in the characteristic equation is
replaced by 1.0, such that all the remaining elements of row k and column k are set equal
to'0'
Then, we can solve for the vector { Vi ] for the value ofVtk
= 0 .
kNote: Care must be taken that the value of O, in the original solution is not equal to '0'.
70

For the mass normalized eigenvectors know that
{<t>,}r[<V/]{0,}=m,
= 1.0 (6-29)
Differentiating eqn. (6-29) with respect to bj and expressing the results in perturbation
format we have
2{*,Y[M^*{*,}r
AM
Ab,
{*>,}= 0 (6-30)
Substituting eqn. (6-26) into eqn. (6-30)
2{,}T[M]{A,{*,}+{v,}}-{<t>,yAM_Ab,
{<*,}- 0 (6-31)
Simplifying eqn. (6-31) using the relationship in eqn. (6-29) we get
2miAi+2{Oi}T[M]{Vl}-{d>,}r AiVf
Abj
.
{O, } = 0 (6-32)
Solving forA where m{= 1.0 and Vt is known
A, = -
{*,}T[M}{V,}-!{0,}r AM
Uj{*.} (6-33)
The eigenvector derivative is computed by substituting the values of .4, and V, into (6-24).
71

6.2.4 Parameter Update Procedure (Linear Coefficients):
Having established the method to calculate the eigenvalue and eigenvector sensitivities,
we have the parameter-response relationships which are instrumental in calculating the
parameter changes required for the model update. We can create a matrix that comprises
the parameter-response relationships for each of the responses of interest, similar to
matrix [ S ] of eqn (6-10), and compute the parameter changes subject to following steps.
Ifwe express dA., as
dX,dX, = - db, +
db,'
db.J 3dbs
db.s
(6-40)a
and dO; as
JO,= '- db, +
db,'
cO~^~ db: +db,- ' ^-dbs
db.s (6-41)
For several dA., and dO; we could establish a matrix as shown
dk,
dO,cbj
CO;dbj
i r
cbsdbs
(6-42)
Equation numbers 6-34 to 6-39 were not used
11

The LHS of eqn. (6-42) is the difference between the analytical and experimental
modal data that can be easily computed from the respective modal data available. The
matrix on the RHS of eqn. (6-42) contains the eigenvector and eigenvalue sensitivities. If
we represent the matrix of the sensitivities as a transformation matrix [ S ], then dbj can
be computed by inverting equation (6-42) yielding
'db,
db.
=W
dX,
dO,
(6-43)
Thereby the parameters b. of the analytical model can be updated by respective db as
h?"
= bj[l + dbj ) (6-44)
6.2.5 NormalModes - Non-Linear Coefficients:
The convergence of the FE model to the experimental model is achieved using
sensitivities calculated in section 6.2.2 and 6.2.3. However, the rate of convergence is
slow. To increase the rate of convergence the difference between the predicted responses
and the current model's responses can be utilized giving faster convergence. Wada and
Kuo[6' demonstrated the nonlinear sensitivity coefficient method and in this section the
method is dealt in detail.
73

The relationship between mass normalized eigenvectors {O} and the mass matrix is given
by
{0}r[M]{0} = [/] (6-45)
For a change in the system where the new mass is [A/ + AjV/] and corresponding
eigenvector is {O + A<t>} we have
{0 +AO}r[iV/ + AiV/]{0 + AO} = [/] (6-46)
Performing matrix multiplication and simplifying we get
{d>}r[;V/]{0} + {0}r[,V/]{A<t>} + {0}r[AW]{<t>} + {cD}r[AM]{AO}
+ {AO}r[,V/]{A<D} + {Act)}r[iV/]{0} + {AO}r[AM]{0} + {A(D}r[AiV/]{AcD}=
[/]
(6-47)
Since the first term of eqn. (6-47) , {O}7^^^} = [l], then
{0}r[,V/]{AO} + {0>}r[AV/]{O} + {0}r[AV/]{AO} + {A<D}r[iW]{AO}
+{AO}r[;V/]{O} + {A0)}r[AV/]{a)} + {AcI>}r[AV/]{AO}= 0
(6-48)
The relationship achieved in eqn. (6-48) will be used in the development of nonlinear
coefficients. Therefore, it was important that this relationship was developed to its
present stage before discussing the derivation of nonlinear coefficients.
74

We know that
[K-\iM]{<X>i}={Q} (6-49)
For a change in a single parameter b, of the system the resultant values of
Stiffness =[K + AK] Mass = [M + AM]
Eigenvalue = A. + AA. and Eigenvector = (O + AO}
Equation (6-49) transforms into (dropping the subscript / for easy representation)
[[K +AK]-(X + AX)[M + AiV/]]{0 + AO} = {o} (6-50)
Performing matrix multiplication and simplifying equation (6-50), we get
[[K + AK]- (X + AX)[M + AM]]{ +A}=
[K -
X\[]{} + [AK]{$>} -
X.[[AA/]{0} + [AiV/]{AO}]~[K-
\M]{a&}
-
AX[[M]{0}-
[Abf]{} ^ [M]{A} ^ [AM]{A}] + [AK]{A}(6-51)
Pre-multiply eqn. (6-51) with {O + AO} and substituting [AT-AA/]{0} = {0} from
eqn.(6-49), we get
75

{<t> -r AO}r[[K + AK]- (X -t- AX)[M + A,tf ]]{0 + AO} =
{O}"[AA-]{0)}+ {AO}r[AK]{0}
- xf{<D}r[AiV/ ]{0} + jO}r[iW]{AO}+ {AO}r[A.W]{o} + {i}r
[AM ]{AO }]+ {0}r[K -
XM]{AO} + {AO}r[ -
U*]{AO} + {0}r[AK]{AO} + {AO }r[A]{AO }
- &xU<X>}r[M]{}+ {0}r[A,W]{0}- {}r[W]{A(t}r
{0}r[A;W]{AO}]- AA.[{AO}r[;W]{0}* {AO}r[AA/]{o}^ {AO
}r
[M]{A }-<- {AO
}r
[AA/]{AO }]
(6-52)
From eqn. (6-50) we see that the LHS of eqn. (6-52) is zero. Thus
0 = {0}r[A^T]{0}+ {A<D}r[A/:]{0}+ {0}r[AAT]{AcD}+ {AcD}r[AA:]{AcD}
+ {<t>}T[K-Xbf]{AQ}
+ {AO}r[AT-XM]{A}
-x\{<X>}T[AM ]{<$} + {0}T[AA/]{AO} + {AO}7'[AM]{0}+ {A<D}r[AA*]{A<D}l
- AX {O}r
[M ]{$ } - AX[{0}f
[M ]{AO }- {O
}T
[AM ]{<t> } + {<*>}T
[AM ]{AO }1
-Ax[{AO}r[.V/]{AO}- {AO}r[A/]{0}- {AO
}T
[AM ]{0 }- {AO
}r
[AA/ ]{AO }1
(6-53a)
The last seven (7) terms of eqn (6-53) are zero due to eqn. (6-48). Also,
{0}r[ -
XM]= {0} from eqn. (6-49). This yields
0 = {0}r[AJST]{0}+ {A<D}r[AAT]{0}+{0}r
[A*]{AO } + {AO}r
[A^]{AO }
+ {O } [K - XM ]{AO } - {AO }r[K - XM ]{AO } - AX {O }
T
[M ]{<& }
-X{0}r[AJV/]{0}- {}T[AM]{A} + {AO}7[A.V/]{0}+ {AO
}7
[AM ]{aO }j
(6-53b)
Rearranging terms of eqn. (6-53b) we get
-A/.{0}r[.V/]{0}-{AO}r[^T- XA/]{AO}= {0}r[A^]{0}^ {AO}r[A^]{0}+ {0}r[A^]{A0}+ {A}T[AK]{AQ}+{}T[K-XM]{A}
(6'53c)
-/.[{0}T[AA/]{0}-{0}f[A.V/]{AO}- {AO}T[A,V/]{0}- {AO}T
[AM ]{AO }1
76

Since we know that {O} [A/j{0} = /. 0,therefore simplifying (6-53c) we get
AX-{}r[K-XU]{A} =
{0]r[AK]{0} + {AO}r[AK]{(t>} + {}r[AK]{A} +{AO}T
[AK]{A}-
A|{0}r[A,V/]{ct)} + {d>}r[AW]{Act>} + {A<S>}r[AM]{} + {A}T
[AM]{AO}](6-54)
Equation (6-54) can be further simplified by consolidating terms to give
AA.-{A<t>}7'[A:-AA/']{AO}= {O + AcD}r[AK]{<D + AO} -x[{0 +A<t>}T
[AM]{0 +
AO}]
(6-55)
6.2. 6 Parameter Update Procedure (Nonlinear Coefficients):
The change in parameters are computed by calculating the LHS and RHS of eqn. (6-55)
separately and solving for idbj \ . Denoting the LHS of (6-55) as dY, we have
dTj=
AA.,- {AO, }
T[K -
X,A/]{AO, } (6-56)
where AX, and {ao,} are the differences between the analytical and experimental
eigenvalues respectively.
TheRHSofeqn(6-55)is
dTj= {<$> + AO};r[A^]{0 + AO}. -X, {O + AO};r[AiV/]{0 + AO}.
where x, and {o} are the analytical eigenvalue and eigenvector respectively.
(6-57)
77

This implies that the experimental eigenvector is
{<D}*-
{0+AO}, (6-58)
Therefore eqn (6-57) simplifies to
(6-59)
This implies that
Mwr [m-^mk (6-60)
We will denote a change in dTj due to a change in bj as (cT,), . Thus eqn (6-60) can be
written as
(/)*,= ({*}? [^7. -*/ [dM]bj\{Y< (6-61)
aT; due to changes in bj can be expressed as
dri=-7}-Ldb1+-^Ldbi+-(5r')4/ (^i)z
c] aAyy 6b* dbs (6-62)
Where each sensitivity can be written as
SU=
(*r/)Ai
c6,(6-63^
78

For several system responses that are functions of {db A ,it implies
dTx-
*n. (3tA
{*,),Tdb.
(M\db.
[dbx]
dba
(6-64)
Ifwe denote the matrix on RHS of eqn. (6-64) as [S ], then eqn (6-64) is expressed as
w=p.W (6-65)
The change in parameter, that is idb . \ ,can be computed from eqn (6-65) as follows
{dbj} = [Sw]-[{dr} (6-66)
Thereby the parameters b of the analytical model can be updated by respective db as
bf"
= bj(l + dbj ) (6-67)
79

6.3 Model Tuning:
With the availability ofnew parameter values, the original analytical model parameters
are updated. The modified model is analyzed to review the responses of the updated
model and they are compared to the experimental model'sresponses. The procedures are
iterated until a good correlation between analytical and experimental model is achieved.
The value of the parameters within the confines of their lower and upper limits may be
found which define the optimum solution. This iteration procedure is represented as,
Design(bf])= Design(b)(\ + a (dbj))) (6-68)
Where Design(bj )= New (rial design
Design(bqj )- Current Design
db: = Computed change in parameter
a = Weightingfactor
q= Iteration number ofparameter update
The weighting factor a is used in the event the parameter changes on the model's
response are nonlinear. For example, the effect of a unit change in height of a beam
affects model frequencies by a factor of three (3). Therefore the value of a for a beam
model using height as a variable will be 1/3, this gives an appropriate change in the
parameter.
80

6.4 Application:
To illustrate the calculation of the eigenvalue sensitivity derivatives, a two mass - three
spring model is used.
/
/
A
k,
X\> x^, xx
k,
-\~
m<"A/"
m:"AT"
*^2 * *^2' "^2
kj\
\
\
-?F
Figure 4
After resolving the forces acting on mi and m2 and rearranging the equations we get
(k{ + k1).xx-k2.x1+F =
mix[ (6-69)
-k2xl+(k[+ k1)x1 =
m2x2 (6-70)
Arranging in matrix form we get
mx 0
0 m-.
+
jc
k, + k-> -k-,
"~K-y K-yT*
fC^ -V, ol(6-71)
For x;= X, Sin cot
, x:= X2 Sin cot, and F
= F0 Sin cot we get
81

-/TItCO X^+
kx+k2 -k2
-k2 k2 + k2 X-,
'Fo'
(6-72)
Since.r,
=
-co"\V, for.r, =yV, Sin cot
Solving forco"
we get
h=
i =t(^ + B) (6-73a)
and
X2= a>i=|(y4
-
5) (6-73b)
where
and
/"
, >
A =
\rnl(6-74)
B =
kr 2kxk^ lk*k, 2Jfc,fr322 2,2
2ifc,Jfc3 jfc? Ik^k! H !-^ - + -4-+ = =^-+ -^- + =r-
V/n2 /n2
/i/m2 mi/7i2/h2
m\m2 rnim2 m\ m\
3+Mm
(6-75)
To compute the sensitivity of the system with respect to stiffness (kh k2, and k3)
we need to determine the derivative of eigenvalue with respect to the stiffness. The
sensitivity of the first eigenvalue, A,/ ,of the system with respect to k, is
dA d BC A. i
IT, c k\ d k\
82

which is computed as
r
dX\
dk.
_L _L
mx 25
2k, 2k, 2k, 2k,
\\
y mf m[ m\m2 mxm,))
(6-76)
Similarly
r
dX
dk-
L = L2
1 1+
m, 25
2k, 2kx 2k, 4k. 2k3
mxm2 m^mxm, mxm2
+2k, 2k,
>A
7
m2 m2JJ
and
(6-77)
dXx
dk3
(
1_mn\
J_2B
(2k 2*3
+
2k, 2k,\\
mxm2 mxm.->
Z77-? m{ J
(6-78)
The sensitivity of the second eigenvalue, X2 ,of the system can be calculated similarly
d X-
5 kx
J_m{ 25
r2k, 2k, 2k-, 2k,^
m} m} mxm,_ mlm2\ ml
(6-79)
J)
dX2
d k->
f
J_ _J_
m. 25
2k} 2kx 2k, 4k, 2k% 2k-, 2k-^^
+ym-
mxm,m-
mxm2 mxm. m.JJ
(6-80)
83

5 A, 2
dk. m.
_/_
2B
(
2k 2k,+
mxm, mxm.
2k,
2m^
2k,
m I /
(6-81)
Case 1: Let kj = k2 = k3 = 100.0 and ot/=
m2= 0.02588
The eigenvalues of the system for the above values of stiffness and mass are
found to be X{ = 100.0(rad/sec)2
and A,2 = 300.0 (rad/sec)2.
The exact sensitivity values are calculated using equation (6-76) to (6-81) and are found
to be
dX, d A.,
dk{
-
ly.iiyv
dk.
dX,
c k{
= 19.3199dX,
dk.
0.0
= 77.2797
and
and
dX
dk3
dX,
l_
19.3199
dk.
- = 19.3199
The values of sensitivities calculated bv NASTRAN are found to be
dX
d kx
dX2
ek
= 19.324
19.324
dX
dk,
dX,
a k,
= 0.0
= 77.296
and
and
c Xx
IE
d X,
a k.
19.324
19.324
Note: NASTRAN applies eqn. (6-18) to calculate the eigenvalue sensitivities.
84

Case 2:
For k, = 300.0, k2 = 550.0, and ks = 890.0 and m,= 0.10357 and m2
= 0. 18125.
The eigenvalues of the system are found to be X,= 4059.51
(rad/sec)2
and X2= 12092.33
(rad/sec)2.
The exact sensitivity values are calculated using equation (6-76) to (6-81) and are found
to be
^- = 4.6701 ^1 = 0.223957 and ^- = 2.84866d kx dk, 3 k3
EL = 4.98522 f^ = MPV&J and ^ = 2.tftf&5 A't dk, dk3
The values of sensitivities calculated by NASTRAN are found to be
dX{
dkx
= 4.6698dXx
dk.
= 0.22393 and
a Xx
dk3
= 2.8482
c X,
dkx
= 4.9848dX,
dk.
= 14.946 and
c X2
dk3
= 2.6683
For the two cases, the sensitivity values calculated by both methods are in
excellent agreement. For coupled systems, the method used in eqn. (6-18) is better suited
as it uncouples the system through the use of modal coordinates (eigenvectors) and it is
easy to implement.
85

6.5 Test Case 1: Nonlinear Vs Linear Coefficient Model Update Procedures:
A three mass - three spring model was used to illustrate the Wada-Kuo (nonlinear) and
Ojalvo-Ting (linear) model update methods and to compare their rates of convergence.
This exercise also validates the nonlinear coefficients model update procedure presented
by C.P. Kuo and B.K. Wada[6'. In their paper Wada and Kuo demonstrated the
application of nonlinear sensitivity coefficients to get faster convergence between an
experimental and an analytical (FE) model.
To document the procedure, two systems were created and one was set as an
experimental system and the other was set as an analytical system. The analytical model
was expected to be tuned to match the experimental model. Detailed calculations are
given in Appendix 2.
A ". k, k3
A
miA-
m2A-
m3
Figure 5
The stiffness and mass for the analytical model are set to
kf = 100; k? = 100;k
= 100; and mf= 25; m\
= 25; /rcf= 25 (6-82)
86

The stiffness and mass for the experimental model are set to
k{ = 300; k{ = 200; k\ = 100; and m\= 25; mf
= 25; m\= 25 (6-83)
Note: For the test case the masses were kept constant, i.e. dm= 0. The variables of the
system arek
and k2 and the sensitivities were calculated for a fractional change in
variables set at dk = 0.01
The eigenvalues and eigenvectors calculated for both systems are given below
Experimental Analytical Difference
Eisenvalues 1.663098 0.7922491 0.870849
9.177121 6.219832 2.957289
25.15978 12.98792 12.17186
1st Eiaenvector 0.042987 0.065597 -0.02261
0.098531 0.118202 -0.01967
0.168653 0.147395 0.021257
2nd Eigenvector -0.10098 -0.1474 0.046416
-0 13661 -0.0656 -0.07101
0.10555 0.118202 -0.01265
3rd Eigenvector 0.167198 0.118202 0.048997
-0.10784 -0.1474 0.039557
0.020386 0.065597 -0.04521
Table 6.1
87

The stiffness and mass matrix of the 3 mass-3 spring system is
[*1 =k+k, -L, 0
0 "-nfcj yfcj
M=
M 0
0 M 0
0 0 H.
(6-84)
For a percentage change dkj the matrix [K] changes to [K'] such that
[*1 =k^l+ck^+k, nfc, 0
."*3 V
(6-85)
This implies that
[^-M-W- 0
0 0
0 0
0 0 0
(6-86)
Similarly for a change ck, we have
Nfc,=
0 0
(6-87)
88

6. 5. 1 NonlinearApproach :
We have established the relationships in sections 6.2.2 to 6.2.6 between
dT, dX, uO.O, [dK], and[dM]. Several equations developed in earlier sections will be
referenced in this application, but the two fundamental equations are(6-56) and (6-60).
That is
dT, = dXt- {d<&}T[K -
XtM]{d$) ={<D*
)T[(dK] - A.,.[dM]]fa ) (6-88)
For a constant mass, dM= 0, therefore
dl> {0f}r[^]{0f} (6-89)
This implies that
dT, = dXt- {d}T[K-XiM]{d} =
{-}T
[dK]{ ] j (6-90)
For the RHS of eqn (6-90) apply eqn (6-62) for ckx . We get
Similarly
(^^fjVkW) (6"92)
89

To obtain dY, ,we substitute eqns (6-91) and (6-92) in (6-62). The terms in eqns
(6-91) and (6-92) are found by substituting dkx= dk, = 0.01 and k{
= k, = 100.0 in
eqns. (6-86) and (6-87). Which gives
[]*i
"/ 0
0 0 0
0 0_
(6-93a)
and
[SK]kn
1 -10
-1 I 0
0 0 0
(6-93b)
We have from the table 6. 1
{?}
0.042987
0.098531
0.168653
(6-94a)
Therefore
|0>t}r
=[0.042987 0.098531 0.168653] (6-94b)
Substituting the values into eqn. (6-91) and eqn. (6-92), we get
(drx)ki={<P<}T[dK]ki{<S>\}= 0.001848
(^z)kx={^zY[dK]k]{^2}= 0.010197
(6-95a)
(6-95b)
90

(drj)*, as{<t,5}r[^]*1{<,5}- 0-027955
(ari)*2={(t)f}r[^{ot} = 0.003085
(^^K^VlH) = 0.00127
(dr>)*2 =fa}T[Ml2fa}= 0.075645
(6-95c)
(6-95d)
(6-95e)
(6-95f)
For dk{ = dk,=0.01, the elements of eqn. (6-95) are then
(*U4,
= 0.1848M,
2/4,= ftiosj
(<*"2)jVdkl
= /.0/97(^2)i
'ck.= 0.727 (6-96)
f^).'/&. = ^.79ii (^
'c*= 7.56/5
Substituting values from (6-96) into (6-64)
{dTiV } =
(*ri)t] / (*r,)t,/
/"I /"I
0. /$-/<? 0.J055
7.0/97 0.127
2.7955 7.6545
dky
dk.(6-97)
91

The sensitivity matrix for the nonlinear method is denoted as [ Sw ]. Therefore
W-
0.1848 0.3085
1.0197 0.127
2.7955 7.6545
(6-98)
This completes the formulation of the RHS of eqn (6-90).
To compute the LHS of eqn (6-90), the steps are illustrated below.
We know that
M-
200 - 100 0
- 100 200 - 100
0 - 100 100
and [M] =25 0 0
0 25 0
0 0 25
(6-99)
From Table 6. 1 we have
dXx=
Xe, - Xa,= 0.870849
dk, = X\ - A., = 2.957289
dX2=
Xe3 - Xa3= 12.17186
{dx} =
{o^} - {o?} =
-0.02261
-0.01967
0.021257
(6-100a)
(6-100b)
(6-100c)
(6-101a)
Therefore
92

{dOx]r
= {-0.0226 \ -0.01967 0.021257} (6-lOlb)
For A.,=
0.79225, we get
[K-XXM] =180.19377 -100 0
-100 180.19377 -100
0 -100 80.19377
(6-102)
For further elaboration refer to Appendix 2. Substituting the eqns (6-101) and (6-102)
into{d<Sx}T
[K-XxM]{d$>x},v/egQt
{dOl}T[K-XxMj{dO{}= 0.192757 (6-103)
Substituting the values from (6-100) and (6-103) into LHS of (6-90), we get
dTl=dXl [K-XxM]{dx} = 0.6780928
Similarly,
Consolidating the values into matrix / vector form yields
{rflV}- '
0.6780928
2.1663182
13.155585
This completes the steps to compute LHS of eqn. (6-90).
(6-104a)
dY, [K-
X,Mj{dO,} = 2.1663182 (6-104b)
dT3 = dX3 [K-X3Mj{d03} = 13.155585 (6-104c)
(6-105)
93

Combining eqns (6-97) and (6-105) gives
0.6780928
2.1663182
13.155585
0.1S4S 0.3085
1.0197 0.127
2.7955 7.6545
dkl
dk.(6-106)
where dkt and dk2 are the fractional changes in the variables kt and k2 respectively.
Eqn (6-106) is of the form
[dkA
Solving for { > gives
\dk.
{dTw} =
[Sw]\dkx\dk.
(6-107a)
\dkx\dk. =[^r'{^-}
(6-107b)
The calculation of a non-square matrix,[Sw]~l
involves further matrix manipulations
similar to the development of eqn. (3-35) we get
i- 1[Sw]~l
=
[SW]T[SW] [Sw] (6-108)
For[M
0.1848 0.3085
1.0197 0.127
2.7955 7.6545
we get
iS]-1
0.073606 1.022647
-0.02201 -0.37831 0.139443(6-109)
94

Thus,
\dkx
\dk,
0.073606 1.022647
-0.02201 -0.37831 0.139443
0.6780928
2.1663182
13. 155585
(6-110)
Multiplication yields
\dkx\dk,
'1.99991
w
1.000 J(6-111)
Using eqn (6-67) the values ofk"
and k2 are found to be
[kxa\ = 100(1 + 1.9999)= 299.99 (6-1 12a)
and
/
(/fcf)= 100(1 + 1.00)
= 200.0 (6-1 12b)
6.5.1.1 Results:
1*1 ] =299.99 and \k2\ =200.0 which are in excellent agreement to the
experimental values k{ = 300 and k2 = 200.0,and convergence is achieved in one
iteration.
95

6.5.2 LinearApproach (simplifiedform) :
This test case employs the same spring-mass systems of the Wada and Kuo test case and
compares the rate of convergence between the methods. TheOjalvo-Ting[2'
method
employs the eigenvalue and eigenvector derivatives in evaluating the parameter changes
required for model correlation. The Ojalvo-Ting method requires a sensitivity matrix
[S0], comprising of eigenvalue and eigenvector derivatives used to evaluate the parameter
changes. The NASTRAN data file that was created to output the eigenvalue and
eigenvector derivatives are documented in Appendix 10. A brief explanation of the data
file is also documented in the appendix.
Refer to the LHS of eqn (6-42). Denote the LHS of the equation, the difference between
the experimental and analytical results, as {dT] . This is represented as
X\-
X\
/i n
{dY0] =
J---
or -of
o*
(6-113)
The sensitivity matrix is constructed using the eigenvalue and eigenvector sensitivities
denoted as
96

p.]-
v ^'i//J*, A/i
</ .. . </7dkx Mn
<W
d<S>\/Ai"
Mn
<**/ ... <*<//<% Mn_
(6-114)
Then eqn (6-42) is represented as
Ko} =
A.'-
A."
K -
K? =
Of -Of
*>:-<*>:.
dk",
d\".
Ulkx
<M>?
*K
/dkx
d\\
d\.
J<t>?
M>"n.
\dk,\dk.
(6-115)
Eqn (6-1 15) is of the form
-Ml (6-116)
Solving for i 'I gives\dk,r
\dkx\dk. -ISoVidTo} (6-117)
97

Since the sensitivity matrix is generally not square, the inverse can be computed by the
Moore-Penrose method, where
[So]'1=
[[s0f[sJ"1[s0]7'
(6"118)
For the example, the iterations were performed using Microsoft Excel 5.0 and the
spreadsheet calculations are given in Appendix 2. The order ofmagnitude of eigenvector
derivatives is much smaller than the eigenvalue derivatives, therefore the effect of
eigenvector derivatives in this case is insignificant. Ojalvo and Ting suggest ways to
enhance the effects of eigenvector derivatives in the model update process by employing
weighting factors to increase the rate of convergence.
6.5.2.1 Results:
The procedure was employed to update the analytical model and it took four iterations to
match the experimental model within 1% of the experimental values. The iterations are
Initial values \k\ = 100.0 and [k2\ =100.0
First iteration: \kxa\ = 189.0 and [fcf] =255.0
Second iteration: (kx\ = 383.62 and (k2) =181.22
Third iteration: (kf) = 271.55 and (k2) = 215.07
98

Fourth iteration: (kf\ = 298.02 and (k?) =201.065
Target value: (*f) = 300.00and(k*_)
= 200.00
6. 6 Comparison of theModel UpdateMethods:
The Ojalvo-Ting method took four (4) iterations to converge within 1% of the
experimental model parameters. The Wada-Kuo method converged in one (1) iteration
with better accuracy. Application of the Wada-Kuo method involves extra initial steps
versus the Ojalvo-Ting method. The Wada-Kuo method was simplified subject to the
modified equation (6-60) which reduced the number of calculations. The Wada-Kuo
method requires a minimum of two runs of the analytical solution to compute the
sensitivity coefficients. The Ojalvo-Ting method, though easier to apply in its simplified
form, was slower in converging to the desired value. Refer to the iteration graph
(Graph 6.1) illustrating the progress of iterations ofOjalvo-Ting method.
99

Graph 6.1
a
u
ae
s.
["" "'
<Nr- ^-
1 ? -r
1 O \1 00 i i
Q\ 1i1
ii
i
<N
I I
\ 1
\ 1
\ 1
u-i 1
i 12i X <M
1 X <
i /\
! 1
'/^
1
! \CN X
t
X
'
1\ m x\ oo x j (N
>. .x
! <^
! ^
i
^ r
00
t
f
/\ Q\
aa
a
V.
\ NxNi
|
V
en
CO
u-
oo
oom
oo
oo
2
a
"3o
TJ4
o
T2 2
u.
a
c
t
I (
t
sssujjus
100

Chapter 7: Summary ofCOMPARE Program
7.1 Objective:
The FORTRAN program COMPARE was written to accomplish the following objectives
(a) Compute the transformation matrix [TnJ .
(b) Obtain the reduced mass and stiffness matrices.
(c) Perform the Cross-Orthogonality check to correlate the FEM and
Experimental results.
7.2 File Setup:
The primary step is to run a NASTRAN model to get the eigen-solutions using SOL 3 or
SOL 63. Call the OUTPUT4 command. This saves the mass matrix, the stiffness matrix,
and the eigenvectors to a binary output file external of the *.F06 file (the standard
output ofNASTRAN). The output of eigenvectors, mass and stiffness matrices in binary
format is read by the binary read program. This program, that reads binary data and saves
the matrices in an ASCII format, is a subroutine (Subroutine RDBN) of the COMPARE
program.
Here we will create a test model in SMS-STAR to obtain modal data for an
experimental test model. SMS-STAR requires input of data points (accelerometer
locations) and the order in which the points are connected. Data acquisition must be
101

specified as the fixed accelerometer or the fixed excitation depending on the data
acquisition method (roving accelerometer or roving impact method). Proceed with all
necessary steps to perform modal analysis and import the data into SMS-STAR. Refer to
the SMS-STAR Manual'8' for details on using the software.
Save the model geometry and the data acquired in an ASCII format file, preferably in
the same directory where program COMPARE resides. The eigenvectors saved in the file
constitute the matrix [E^] which are essential for the Cross-Orthogonality check. The
experimental modal analysis should be completed and the data stored in a ASCII file
format ( *.ASC ). Various file-format options are available in STAR, and ASCII is one of
them. The file saved in ASCII format gets a default suffix (extension) of ASC. The
*.ASC file should be available for the program COMPARE to proceed with its
computation.
Note: File name must be specified such that it is easy to relate to the FE model and must
have the suffix "ASC".
7.3 Procedures of the Program COMPARE:
Refer to the flow chart for the COMPARE program given in Appendix 1,and the source
code of the program in Appendix 4. COMPARE is an acronym for Cross-Orthogonality
102

Matrix Procedures And REduction program. To review the theory and procedures of the
program refer to section 3.4.
Step 1: Read the NASTRAN data file to get grid locations of the finite element model.
Step 2: Read the *.ASC data file to get grid locations of the experimental model and the
eigenvectors for each mode.
Note: The Analytical model and the experimental models should be oriented alike; i.e.,
the X-axis, Y-axis and Z-axis should be aligned in the same fashion for both models. It is
preferable for better accuracy and an easier match between models that the FEM
coordinates are spaced a factor (half, fourth, etc.) of the experimental coordinates spacing.
Making the FE model finer but having a corresponding coordinate between the models
lends to a better comparison of data points.
Step 3: Subroutine SPSRH is called to perform the spherical search. The Spherical search
is performed by taking the square of the difference between the experimental and
FE coordinates and pairing nodes that have the least value for the sum of the
squares. This is performed until all experimental points have corresponding FE
node points.
103

Step 4: Subroutine RDBN calls the binary read program to read the binary output file of
NASTRAN containing the FE model's eigenvectors, and the mass and stiffness
matrices. The matrices are read and stored as follows
Eigenvectors in PHIVO.OUT
Mass matrix inMGG.OUT
Stiffness matrix in KGG.OUT.
Step 5: The FE eigenvectors PHIVO (of size say n x m) are partitioned such that those FE
modal displacements that correspond to experimental eigenvectors are assigned to
the A-set (Accepted set) matrix. The A-set matrix [A] (of size say q x m) is stored
in the file A.OUT. The remaining part of the PHTVO eigenvector matrix is assigned
to the matrix [PHIO] ((n-q) x m)) (Omitted set) and stored in a file PHIO.OUT.
Note: The inverse ofmatrix [A] is required to obtain the transformation matrix and matrix
[A] may not be a square matrix. Computations of a matrix inverse for a non-square matrix
are unique and not easy. Hence the Pseudo-Inverse is computed by transforming thenon-
square matrix into a square matrix by multiplying with its transpose. The procedure is
listed in detail in section 3.4.
Step 6: The transpose of [A] is assigned to [AT] and stored in the file AT.OUT. The
transpose of [A] is required to perform the necessary matrix manipulation to obtain
104

the matrix inverse of [A]. [A] is pre-multiplied to [AT] resulting in a square matrix,
[ATA], which is stored in ATA.OUT.
Step 7: The inverse of [ATA] is performed using the Subroutine DLINRG, an IMSL
routine. Subroutine DLINRG gives a double precision inverse and is assigned to
[ATAI]. A check is performed to ascertain the accuracy of the computed inverse.
[ATAI] is stored in a file, ATAI.OUT.
Step 8: Multiply [ATAI] to [AT]. This results in the matrix [ATAIAT].
Step 9: Pre-multiply [PHIO] by [ATAIAT] and assign the result to PMTEST] (an
(n-q) x m matrix).
Step 10: The steps of computing the transformation matrix, [TJ an (n x m) matrix are
Identify the location of the A-set eigenvectors in the PHTVO matrix.
Substitute a 1.0 in that location and the rest of the elements of the row with
zeroes.
Substitute the elements of the DMTEST ((n-q) x m) matrix corresponding
to rest of the elements of the matrix being compiled. This results in the
transformation matrix, [Tm].
The transformation matrix is stored in the file TM.OUT.
105

Step 11: The reduced mass matrix is obtained by computing[Tm]T
[M] [Tm] ,where [M]
is the mass matrix of the analytical (FE) model.
Step 12: Perform the Cross-Orthogonality check. The Cross-Orthogonality check
obtained from the following product[E,^]1
[Maar] [Afen,]. Where[E^]1
is the
transpose of the experimental eigenvectors, [Muar] is the reduced mass matrix, and
[Afem] is the eigenvectors of the FE model.
Step 13: The result of the Cross-Orthogonality check is assigned to [C^] and stored in
COOR.OUT. The matrix [0^] should be an identity matrix for well matched
models. However, if discrepancies exist between the models, the matrix [CooJ will
not be an identity matrix and will have off-diagonal elements.
Step 14: To compute the reduced stiffness matrix, the procedure is similar to Step 1 1.
Replace matrix [M] with matrix [K] in Step 11.
106

ChapterS: Project Statement
A typical structural system is defined by a set of parameters that are a group of physical
quantities that are used as design variables (e.g., length, thickness, etc.) and another group
of constant quantities called the problem parameters (e.g., ultimate strength, density, etc.).
In structural applications, the design variables and problem parameters are either
geometric type and displacement or stress type respectively. The problem parameters are
defined as those variables that adequately define a possible candidate design or operating
conditions and their values are fixed within some limits that are controlled by factors
external to the model. After obtaining a design, it is possible to investigate the solution
changes as the structural parameters vary. This relationship between a change in response
with respect to changes in parameters has been established as the sensitivity analysis that
lends towards the development of an optimum design.
Mathematically, this requires determining the derivatives of an objective function
and the design variables with respect to the model parameters of interest. These
derivatives are called sensitivity coefficients. This area of study, referred to as the
sensitivity analysis, has been an active area of optimization research over the past decade.
With most optimization procedures, a dominant contributor to the computational cost is
the calculation of the derivatives of an objective function and constraints with respect to
the design variables. Therefore, it is desirable in any optimization procedure to have
107

efficient numerical or analytical methods to determine the sensitivity coefficients, and
efficient computational methods to solve the resulting equations. Generating sensitivity
coefficients by the finite difference method requires repeating the FE analysis with
incremental values of the design variables. This approach has the disadvantage of being
computer intensive, especially if the governing equations are extensive and take too much
computer time to solve. This can be further complicated by the large size of matrices that
are to be manipulated to obtain derivatives of few variables. There are numerical
techniques that are easier and less computer intensive and are employed on the current
model. The theory and procedure of sensitivity analysis have been explained in earlier
sections and here the procedure of sensitivity analysis is applied to the model.
The program developed in the following pages performs the Cross-Orthogonality
check to correlate the experimental and finite element modal data. The required
NASTRAN solutions, SOL 63 and SOL 53, are run to get the sensitivity coefficients. The
coefficients are used to calculate the parameter changes necessary to update the analytical
model. The modal data of the resultant updated model should then be better correlated
with the experimental model's modal data. Finally, to ascertain that the models have a
good correlation, the Cross Orthogonality check is performed using the eigenvectors of
the updated model. As stated earlier, the mass matrix of the finite element model has to
0Refer to section 6.2.2
108

be reduced to correspond to the experimental model size. The mass matrix that will be
reduced for the final Cross Orthogonality check should be of the updated FE model.
To validate the sensitivity analysis procedure two test cases were analyzed. The
nonlinear and linear model update procedures are explained in detail with an application
(Test Case 1) in section 6.5. The test cases being discussed here are to illustrate the
application of the model update procedures on uncoupled (Test Case 1) and coupled
systems (Test Case 2), and to demonstrate the application of the model update method
with reduced modal data (see section 8.2).
8. 1 Test Case 13Mass - 3 SpringModel:
A three mass- three spring model was used to develop two solutions. One solution to
represent the experimental results and the other solution represented the analytical model.
The analytical model was then updated to agree better to the experimental model. See
section 6.5 and Appendix 2 for details.
S.2 Test Case 2 3 Element Beam Model:
A three (3) element beam model was used and two solutions were developed, as in test
case 1,to represent the experimental results and the analytical model. The first model was
a 3 element beam model of dimensions6.0"
x1.0"
x0.25"
which was used to represent
the experimental results. The second model was a 3 element beam of dimensions
109

6.0"
x1.0"
x0.125"
which was used to represent the analytical model. The stiffness and
mass matrices, together with the eigenvectors were computed and the detailed
calculations are given in Appendix 8.
For the experimental model in Approach I the eigenvectors for all six (6)
DOF/node were used in calculating the change in parameter to update the model.
However, for the experimental model in Approach II the eigenvectors only for one (1)
DOF/node (the Y translation) were used in calculating the change in parameter to update
the model. Calculations were performed in Microsoft ~ Excel 5.0 to compute the desired
change in parameter to update the model.
A transformation matrix using the analytical eigenvectors (A-set and O-set) was
computed to calculate the reduced mass and reduced stiffness matrix. For a change of
<5h= 0.01 the new mass (Mnew) and stiffness (Kncw) matrices were computed on the
spreadsheet and the reduced mass (Maar) and stiffness (K^) matrices were obtained. If the
model under consideration were a large DOF system then Knew and Mnew must be
computed using NASTRAN for a known change in each parameter. Determine the
difference between Knew and Kold, Mnew and Mo(d respectively. Also determine the
difference between the corresponding analytical and experimental eigenvalues and each
corresponding eigenvector. This data was used to calculate the required change in
parameter to update the analytical model to better correlate with the experimental model
110

(see Appendix 8 for details). The process was modified where only the nonlinear (Wada-
Kuo) method was employed using the following two approaches
8.2.1 Approach I:
The parameter changes to update the analytical model that were computed in Approach I
employed the total (six (6) DOF/node) analytical and experimental eigenvector. This
implies that for a 3 element cantilever beam which has 18 DOF, the analytical and
experimental eigenvector have 1 8 rows/mode. This was possible as the eigenvectors of
analytical and experimental model in the test case, under consideration, were computed
for different beam thickness. See Appendix 8 for details. In real life we do not have the
luxury of having all DOF/mode for the experimental model, therefore we must be able to
compute the parameter changes with the limited experimental data. The Approach II deals
in the procedure to perform such computation.
8.2.2 Approach II:
As mentioned earlier, we need to compute the parameter changes to update the model
with experimental eigenvectors ofmuch smaller DOF. Therefore the method employed to
overcome the limitation is to reduce the analytical model's system to the experimental
s dimension. This can be accomplished by using the transformation matrix to
obtain the reduced mass and stiffness matrices. Using the eigenvalues, the analytical
111

eigenvector of DOF that correspond to the experimental model, and the reduced mass and
stiffness matrices the change in parameters were computed. See Appendix 8 for details.
8.3 Results:
The stiffness of the springs of the experimental model in Test Case 1 were k, =300,
k2= 200, and k3 = 100 and the stiffness of the springs of the analytical model were
k[ = 100, k, = 100, and k3= 100. Therefore the model update parameter for dk, must be
2.00 which implies the desired change in stiffness of 200%, and similarly the desired
model update parameter dk2must be 1 .0.
The model update parameters computed, in one iteration, by the Nonlinear
(Wada-Kuo) method were 1.9999 and 1.00 which are in excellent agreement with the
desired results.
The model update parameters computed, in four iterations, by the Linear
(Ojalvo-Ting) method were 1.98 and 1.01 which are also in good agreement with the
desired results, but needed more iterations to converge than the Nonlinear method.
For the 3 element beam model, the thickness of the experimental model was twice
the thickness of the analytical model, therefore the expected value for model update
parameter (dh) was 2.0. Using the total eigenvector, mass and stiffness matrices
112

(Approach I) the model update parameter of 1.985 obtained is within 1% of the expected
value. The model update parameter computed by Approach I (total system) and by
Approach II (reduced models) were identical, which suggest reduction of mass and
stiffness matrices has little impact on results. This is true only when the transformation
matrix does not have inaccuracies/ Wada and Kuo model update method is very efficient
and gave excellent results in just one iteration.
8.4 Considerations andRecommendations:
In this thesis, applications of the model update procedure were on simple models of small
degree of freedom, which were easy to administer and illustrated the strength of the Wada
and Kuo method. This method can be very easily applied to models with large number of
nodes and with multiple degrees of freedom, but care must be taken to ensure that
transformation matrix for matrix reductions does not induce errors. An easy check to
ascertain the accuracy of the transformation matrix is to generate the total-eigenvector
matrix using A-set eigenvectors (see eqn. (3-39)) and computing the difference between
calculated total-eigenvector and analytical total-eigenvector. The difference should be a
null matrix for an error free transformation matrix.
*
See section 8.4 for details
113

Chapter 9 : Conclusion
In previous chapters the model update procedures were presented and applications
illustrated to bring attention to the differences between Wada-Kuo and Ojalvo-Ting
methods. The advantage of the Wada-Kuo method is in its fast rate of convergence and
makes use of the nonlinear relationships in the model update process. For a large number
of parameters application of the Wada-Kuo method becomes complicated and requires
multiple iterations for the fractional change in each parameter. This implies multiple FE
processing runs, one cycle for each parameter of interest to get the MIKV/ and Kncw. This
also requires computation of the nonlinear sensitivities for each parameter change being
considered.
The Ojalvo-Ting method uses the eigenvalue and eigenvector derivatives of the
system with respect to each parameter. These are obtained through a single FE analysis
run and the derivatives are used to arrive at the required parameter change. The rate of
convergence of this method is slower and requires multiple iterations as demonstrated in
Test Case 1. However, the Ojalvo-Ting method may be more efficient if many
parameters are being considered in updating the model. This requires the operators
judgment in choosing an appropriate model update method for the application at hand.
The Ojalvo-Ting method can be made more efficient by employing a weighting matrix
which increases the contributions of eigenvector derivatives. It would be a good project
114

for future thesis work to find all the factors that help judge the conditions under which a
method would be more efficient.
In my opinion, Wada-Kuo method is more efficient for less than three parameter
model update process and Ojalvo-Ting method would be a better process for model
update process where more than three parameters effect a model's behavior. The
weighting matrix calculation, for Ojalvo-Ting method, involves a good understanding of
the various factors that influence the model and requires extra computations to arrive at
an efficient model update process.
The elements needed to calculate the nonlinear sensitivities are the reduced mass
and stiffness matrices, the transformation matrix ( to compute reduced Knew and Mncw ),
and the eigenvalue and eigenvector differences. The Wada-Kuo method requires very
little effort as most of the elements required to calculate the nonlinear sensitivities are
already available after the Cross-Orthogonality check. Tne same transformation matrix
computed for the initial analytical model for the Cross-Orthogonality check is used to
compute reduced Knew and Mne.v.
An additional contribution of the author during the development of this thesis is
the reduction in computations required to generate the nonlinear sensitivity coefficients.
This has significantly reduced the generation of the model update matrix [ Sw ] from the
115

repetitious process as demonstrated by the Wada and Kuo. The Wada-Kuo method
needed eight (8) steps to arrive at each nonlinear coefficient. The Author demonstrated a
single step procedure which significantly reduced the complexity making it easier to
program. Thereby making it even more efficient and less complicated to apply to simple
models than Ojalvo-Ting method.
116

References
1 . Krammer, Daniel C;
Test-Analysis-Model development using an exact modal reduction; International
Journal ofAnalytical and Experimental Modal Analysis, Oct. 1987. Pages 174-179.
2. Ojalvo, I.U.; Ting, T.; and Pilon, D.;
PAREDYM - A Parameter Refinement Computer Code for Structural Dynamic
Models; International Journal ofAnalytical and Experimental Modal Analysis, Jan
1989. Pages 43-49.
3. Nelson, Richard B;
Simplified Calculation ofEigenvector Derivatives; AIAA Journal, September 1976.
Pages 1201 - 1205.
4. MSC/NASTRAN Application Notes
Calculation ofEigenvector Derivatives in Design Sensitivity Analysis; Application
Notes, January 1986. Pages 1 - 36.
5. Collins, Jon D; Hart, Gary C; Hasselman, T.K.; and Kennedy, Bruce;
Statistical Identification of Structures; AIAA Journal, Feb. 1974. Pages 185 - 190.
6. Kuo, C.P.; and Wada, B.K.;
Nonlinear Sensitivity Coefficients and Corrections in System Identification; AIAA
Journal. November 1987. Pases 1463 - 1468.
117

7. Krebs, Derek J.;
Correlation of Finite Element and Experimental Eigenvectors; Thesis submitted for
MS in Mechanical Engineering at Rochester Institute ofTechnology, June 1990.
8. Structural Measurement System;
SMS / STAR Manual
9. Bella, D; and Reymond, M;
MSC NASTRAN DMAP Dictionary
10. MSC/NASTRAN Corporation
MSC/NASTRAN Handbook for Dynamic Analysis
1 1 . MSC/NASTRAN Corporation
MSC NASTRAN Application Manual
12. MSC/NASTRAN Corporation
MSC NASTRAN Users Manual
13. Moore, G.J.
MSC/NASTRAN Design Sensitivity and Optimization, Chapters 1-4
14. Timoshenko, S; and Young, D.H; Weaver, W;
Vibration Problems in Engineering (Fourth Edition)
John Wiley Sons. Chapters 1,3, and 4
15. Ewins, D. J.;
Modal Testing: Theory and Practice (First Edition)
Research Studies Press Ltd. ChaDter 4
118

16. Thompson, W.T;
Theory ofVibration with Applications (Fourth Edition)
Prentice Hall. Chapters 2, 3 and 5
17. Thompson, W.T;
Theory ofVibration with Applications (Fourth Edition)
Prentice Hall. Program CHOLJAC.FOR
18. Cook, R.D;
Finite Element Modeling for Stress Analysis (First Edition)
John Wiley and Sons.
19. Noble, B; and Daniel, J.W;
Applied Linear Algebra (Third Edition)
Prentice Hall. Chapter 3 (Pages 125 - 127)
20. Noble, B; and Daniel, J.W;
Applied Linear Algebra (Third Edition)
Prentice Hall. Chapter 1 (Pages 14)
21 . Ugural, A.C; and Fenster, S.K;
Advanced Strength and Applied Elasticity (First Edition)
Elsevier Publishing Co.
22. Budynas, R.G;
Fundamentals ofVibration Theory with Applications (Notes for EMEM-821)
Rochester Institute ofTechnology, NY. Session 12
119

APPENDIX 1
Flow Charts . For the COMPARE Program and Model Update Procedures

FLOW CHART FOR COMPARE PROGRAM
FE Analysis -NASTRAN
Get OUTPUT4 file
Save data in the same directorywhere experimental data is
stored
/Stop, Copy files to a\I common directory J
Experimental Analysis
SMS - STAR
Perform Experimental analysis and
save data in ASCII format.
FE and Experimental Analysis of
the model completed
Run COMPARE
Read Experimental and
NASTRAN data files
1-1

Perform Spherical search to match
grids of models and pair nodes
Read OUTPUT4 file (Subroutine RDBN)and save FE eigenvectors, Mass and
Stiffness matrices in files.
Input the DOF (X, Y and Z)of eigenvectors
Partition the analytical eigenvector
to experimental DOF, subject to
node pairing
Coirmute the transformation matrix
Yes
1-2

Perform Mass matrix reduction -Moar
(and stiffness matrix reduction -K )
Read in stiffness matrix instead of
Mass Matrix
Perform Cross-Orthogonality Check
SaveM^, Kaar, and C^ in files.
Stop
1-3

FLOW CHART FORWADA-KUO MODEL UPDATE PROCESS
FE Model analysis dataExperimental Model
analysis data
Compile eigenvectors of analytical
and experimental models
Perform Correlation:
Cross-Orthorthogonality Check
Calculate the difference of eigenvalues (dX)and eigenvectors (d<t>) between models
-No-
Perform FE analysis of the model with a
known fractional parameter change
1-4

Perform Mass and Stiffness matrix
reduction ofK^ and Mnew
Perform Mass and Stiffness matrix
reduction ofKold and Mold
( 1 ) Calculate the difference between K
and K ... andM andM,
,old' new old
(2) Calculate
^.-{dOjMtKJ-^rMJIdO,}
(3) Calculate
(4) Divide (3) with fractional parameter
change to get sensitivity
b
1 -5

(5) Calculate the Pseudo-Inverse of (4)
Multiply (5) with (2), this gives the
desired fractional parameter change to
update the model for better correlation
Stop
1-6

APPENDIX 2
Test Case 1: 3 Mass - 3 Spring Model
Comparing Wada-Kuo and Ujalvo-Ting methods
Detailed procedures ~

This appendix pertains to the explanation of the step-by-step procedure to accomplish the
Nonlinear and Linear sensitivity coefficients. The ease of application of each method
rests on the user's preference and the size of the model under consideration. The model
used here to explain the methods is referred to as Test Case 1 (section 8.1) and it is the
same model used in the section 6.5.
/
/
/
A
Figure 5 (Repeated)
The eigenvalues and the eigenvectors for the 3 mass - 3 spring model used in this
appendix were computed through NASTRAN and were used to evaluate and compare the
Nonlinear (Wada-Kuo) and the Linear (Ojalvo-Ting) sensitivity coefficients methods.
The stiffness and mass for the analytical model are set to
kf = 100; kl = 100; if = 100; and mf= 25; mf
= 25; m%= 25
The stiffness and mass for the experimental model are set to
k[ = 300; k2 = 200; k\ = 100; and m{= 25; mf = 25; m\ = 25
(6-82)
(6-83)
2-1

Parameters Experimental Analytical Difference
Eigenvalues
h 1.6631 0.7922 0.8708
X, 9.1771 6.2198 2.9573
X} 25.1598 12.9879 12.1719
1st Eigenvector
0.0430 0.0656 -0.0226
0.0985 0.1182 -0.0197
0.1687 0.1474 0.0213
2nd Eigenvector
-0.1010 -0.1474 0.0464
-0.1366 -0.0656 -0.0710
0.1055 0.1182 -0.0127
3rd Eigenvector
0.1672 0.1182 0.0490
-0.1078 -0.1474 0.0396
0.0204 0.0656 -0.0452
Table 2.1
Therefore, consolidating the eigenvectors of the analytical model we get
[*.]
(dM (02) {O3}
0.0656 -0.1474 0.1182
0.1182 -0.0656 -0.1474
0.1474 0.1182 0.0656
This implies that the transpose of the analytical eigenvector is
mT
0.0656 0.1182 0.1474
-0.1474 -0.0656 0.1182
0.1182 -0.1474 0.0656

A. Theoretical calculations of the eigenvalue derivatives:
In this section the exact eigenvalue sensitivities are calculated and compared to the
NASTRAN generated eigenvalue sensitivities, to ascertain the accuracy of the
NASTRAN computed sensitivity values. We know the method to compute the eigenvalue
sensitivities from section 6.2.2. Once the eigenvectors and eigenvalues are determined,
the sensitivities can be calculated. The calculated eigenvalue sensitivity are used to
compute the model update parameters to demonstrate the application of sensitivity
coefficients to model tuning.
The stiffness matrix [K] computed for kt=
k2=
k3= 100.0
[K] =
200 -100 0
-100 200 -100
0 -100 100
Assume a change in stiffness of5kt=
8k2= 0.01. The stiffness k3 is considered to
be a constant for the current example as model update parameters are computed for ki
and k2. Therefore for a change of 5k! in kx, the corresponding change in [K] is [AK! ],
computed using equation (6-86), which gives
[AK, ]=
1 0 0
0 0 0
0 0 0
2-3

Similarly, for a change of 5k2 in k2, the corresponding change in [K] is [AK2 ]
[AK2 ] =
1 -1 0
-1 1 0
0 0 0
The eigenvalue derivatives are computed by employing eqn (6-18) which is included
below
Abj m, Abj Ab.
Ifwe assume a constant mass and m,=
1.0, then eqn. (6-18) simplifies to
AX,-( -vr
[AATl , .
- W Vr1 1'}Ab, Abj
The sensitivity coefficients are computed using [Oa]T
[AK] [Oa ] and considering only
the diagonal terms.
Note: Analytical eigenvectors are used to acquire the eigenvalue derivatives. The
eigenvectors are consolidated into a matrix form for ease of computation.
Therefore solely consider the diagonal elements of the resultant matrix as they are
the eigenvalue derivatives.
2-4

This implies that [AK(] [O, ] is
6.560E-02 -1.474E-01 1.182E-01
0.000E+00 0.000E+00 0.000E+00
0.000E+00 0.000E+00 0.000E+OO
and [<Da]T[AK,][Oa]is
4.303E-03 -9.669E-03 7.754E-03
-9.669E-03 2.173E-02 -1.742E-02
7.754E-03 -1.742E-02 1J97E-02
Similarly, [AK2] [Oa ] is
-0.05260474 -0.08179824 0.2655971
0.05260474 0.08179824 -0.2655971
0 0 0
and [Oa]T
[AK:] [Oa ] is
2.767E-03 | 4.303E-03 | -1.397E-02
4.303E-03 6.691E-03 -2.173E-02
-1.397E-02 -2.173E-02 7.054E-02
Consolidating the diagonal elements of each resultant matrix into a column we get
dXj for 5k; 5k,
/ = / 4.303E-03 2.767E-03
i = 2 2.173E-02 6.691E-03
i= 3 1.397E-02 7.054E-02
2-5

For a change in stiffness of 5k,=
5k2=
0.01, computing the sensitivities
s=
dk.
'8kj J
and expressing as matrix [ SQ ] we get
j-l i-2
[Sol-
4.303E-01 2.767E-01 / = /
2.173E+00 6.691E-01 /=2
1.397E+00 7.054E+00 i = 3
The values of the sensitivities obtained through NASTRAN are
[So]=
4.303E-01 2.767E-01
2.173E+00 6.691E-01
1.397E+00 7.054E+00
The exact and NASTRAN computed sensitivities show an excellent agreement,
and the differences were negligible (of the order of -1.3E-14 %).
To calculate the model update parameters we require the inverse of the
rectangular matrix [S0]- See eqn (6-107) for details. We compute[S0]~l
using theMoore-
Penrose method.
The transpose of [So] is
[So r = 4.303E-01 2.173E-00 1.397E+00
2.767E-01 6.691E-01 7.054E+00
Tnis implies that
2-6

[SolT[Sol = 6.857 11.429
11.429 50.286
This implies that
nsorisoir'= 2.348E-01 -5.335E-02
-5.335E-02 3.201E-02
This implies that
[Sol-1= 8.625E-02 4.743E-01 -4.837E-02
-1.410E-02 -9.449E-02 1.513E-01
For the current iteration (dT0) =lxii -X*), refer to Table 2. 1 on page 2-2
(k-k)
{*o}"
0.8708
2.9573
12.1719
The values of fractional change in parameters is [S0]''
{dT0}. This implies that
dkj 0.889
dk: 1.550
The model update parameter changes for kt and k2 are given byk"^
= kt (l + dk, )
Therefore we get
, new
kx{\+dkx) = 189.0
vr = k2(\ + dk2) = 255.0
2-7

B. PAREDYM - Ojalvo-TingMethod:
In this section the eigenvalue and eigenvector sensitivities, generated by NASTRAN, are
used to compute the model update parameters and compared with the model update
parameters obtained in the previous section. The eigenvalue and eigenvector are
generated by employing SOL 63 and SOL 53, the solution procedures of
MSC/NASTRAN. The Ojalvo-Ting method will be applied to the same example as dealt
in the previous section.
First Iteration:
The sensitivity matrix compiled of eigenvalue and eigenvector derivatives is
[Sol=
y= / j=l
4.303E-01 2.767E-01 dXi / dk,
2.173E+00 6.691E-01 dX2/dk,
1.397E+00 7.054E+00 dki/dk,
-3.377E-02 -2.314E-03 d&n/dk.
2.523E-02 -1.169E-02 d0I2 / dk,
8.545E-03 1.400E-02 d0l3/dki
1.874E-02 -5.900E-02 d02l/dki
4.314E-02 -3.794E-02 d022/dkj
-6.188E-02 9.694E-02 d023 / dkf
-4.211E-02 -2.440E-02 d03l/dk,
-3.980E-02 -7.53 5E-03 d032 - dk,-
8.191E-02 3.191E-02 d033/dki
2-8

{drG} =
8.708E-01(k-k)
2.957E+00
(x*2-Xa2)1.217E+01
fa-K)-2.261E-02
K"<Im)-1.967E-02
(<D?2-<t>?,)2.126E-02
K-*?3)4.642E-02 (<tf, -<&?,)-7.10IE-02
(*a-*a)-1.265E-02
(^23-^23)4.900E-02
K-*?i)3.956E-02
(^32-^2)-4.521E-02
K-*3a3)
The matrices[S0]T
and[S0]T[[So]T[So]]"'
are not listed as the matrices extend beyond
the page.
Performing the matrix manipulations required to obtain[So]"1
we get
[SolT[Sol = 6.875 11.424
11.424 50.302
and
[isortsoir1
= 2.336E-01 -5.305E-02
-5.305E-02 3.193E-02
2-9

The parameter changes are computed using {dk}=
[S0]"'
{dr0}. Evaluating {dk} for the
current set of values we get
dkt 0.8864
dk2 1.5497
This implies that
k^ = kx{l + dkx) = 188.64
kf = k,(\ + dk2) = 255.0
The values of k[ andk
closely match the theoretically calculated values.
For the model update procedure considering only the eigenvalues sensitivities we get
[Sol =
4.303E-01 2.767E-01
2.173E+00 6.691E-01
1.397E+00 7.054E+00
The transpose of [So] is
[So1T= 4.303E-01 2.173E-00 | 1.397E+00
2.767E-01 | 6.691E-01 7.054E-00
This implies that
[So]T[Sol= 6.857 11.429
11.429 50.286
This implies that
2-10

[[SoiriSoirl= 2.348E-01
-5.335E-02
-5.335E-02
3.201E-02
This implies that
[Sol'= 8.625E-02 4.743E-01 -4.837E-02
-1.410E-02 -9.449E-02 1.513E-01
We know that (dT0). = (^ -
X)
Ko}"
0.8708
2.9573
12.1719
The values of fractional change in parameters is [SQ]*'
{dT0}. This implies that
dki 0.889
dk2 1.550
Note: The effect of the eigenvector sensitivities on {dk} is insignificant as the
eigenvector derivatives are ofmuch smaller magnitude than eigenvalue derivatives.
Using the new values of k{ and k2 the updated model was analyzed to give
eiaenvalues, eigenvectors, and the corresponding derivatives of eigenvalue and
eigenvectors. Using the new data set the above procedure was iterated. The iterations will
be performed till the updated model parameters match within 1% of the target parameter
values.
2-11

Second Iteration:
Employing the PAREDYM procedure to the updated model after the first iteration we get
[Sol-
7.601E-01 3.650E-01
2.553E+00 5.296E+00
4.246E+00 2.003E+0I
-3.610E-02 -1.535E-02
1.670E-02 -1.345E-02
1.940E-02 2.880E-02
-1.243E-02 4.498E-02
-2.221 E-03 1.143E-03
1.465E-02 -4.612E-02
2.491E-02 2.703E-02
-5.342E-03 -9.451E-03
-1.957E-02 -1.757E-02
{drc} =
1.882E-01
1.325E+00
-1.473E+00
-2.043E-02
-2.721E-03
8.259E-03
-2.172E-01
-2.495E-01
2.228E-01
1.731E-02
2.255E-02
-2.659E-03
2-12

The matrices[S0]T
and[So]T[[So]T[So]]*'
are not listed as the matrices extend beyond
the page.
Performing the matrix manipulations required to obtain[S0]'1
we get
[SolT[Sol = 25.133 98.865
98.865 429.469
[[Sol'lSoir1- 4.212E-01 -9.697E-02
-9.697E-02 2.465E-02
The parameter changes are computed using {dk}=
[So]"'
{dT0}. Evaluating {dk} for the
current set of values we get
dki 1.0297
dk2 -0.2893
This implies that
wr = kx{l + dkx) = 383.622
k'T = kz(\ + dkz) = 181.223
Using the new values of kj and k? the updated model was analyzed to give
eigenvalues, eigenvectors, and the corresponding derivatives of eigenvalue and
eigenvectors. Using the new data set the above procedure was iterated for the third time.
2-13

Third Iteration.
Employing the PAREDYM procedure to the updated model after the second iteration we
get
[Sol-
4.412E-01 7.363E-01
2.776E+00 7.517E-01
1.213E+01 1.301E+01
-2.832E-02 -1.183E-02
1.464E-02 -2.503E-02
1.368E-02 3.686E-02
5.824E-02 -4.514E-02
-3.698E-02 8.246E-03
-2.126E-02 3.689E-02
3.327E-02 6.204E-02
-2.048E-02 -4.079E-02
-1.278E-02 -2.125E-02
{drQ}=
-5.553E-02
-6.791E-01
-1.109E+00
9.076E-03
8.788E-04
-2.561E-03
-1.592E-02
1.286E-02
3.452E-03
-1.061E-02
-1.771E-02
4.196E-03
2-14

The matrices [S0] and[So]T[[S0]T[So]]''
are not listed as the matrices extend beyond
the page.
Performing the matrix manipulations required to obtain[S0]"'
we get
[SolT[Sol = 154.996 160.197
160.197 170.379
[[Sorisoir1= 2.287E-01 -2.150E-01
-2.150E-01 2.080E-01
The parameter changes are computed using {dk}=
[So]"'
{dT0}. Evaluating {dk} for the
current set ofvalues we get
dkj -2.921E-01
dk2 1.868E-01
This implies that
k= kx(\+dkx) = 271.546
k'T = kz(\^dk2) = 215.068
Using the new values of kj and k2 the updated model was analyzed to give
eigenvalues, eigenvectors, and the corresponding derivatives of eigenvalue and
eigenvectors. Using the new data set the above procedure was iterated for the fourth time.
2- 15

Fourth Iteration:
Employing the PAREDYM procedure to the updated model after the third iteration we
get
[Sol =
6.140E-01 5.579E-01
3.079E+00 1.289E-01
7.169E+00 1.652E+01
-3.450E-02 -1.482E-02
1.670E-02 -1.942E-02
1.780E-02 3.424E-02
3.681E-02 -5.106E-02
-1.600E-02 6.399E-03
-2.081E-02 4.467E-02
3.422E-02 4.560E-02
-1.537E-02 -2.399E-02
-1.885E-02 -2.161E-02
{dfo} =
1.550E-02
2.928E-01
-3.765E-01
-4.563E-03
5.015E-05
1.200E-03
5.511E-03
-5.638E-03
-1.716E-03
4.721E-03
6.825E-03
-9.120E-04
2-16

The matrices[S0]T
and[S,j]T[[So]T[So]]"1
are not listed as the matrices extend beyond
the page.
Performing the matrix manipulations required to obtain[S0]"'
we get
[Solr[Sol = 61.253 119.156
119.156 273.215
[[SolT[So]rl= 1.077E-01 -4.697E-02
-4.697E-02 2.414E-02
The parameter changes are computed using {dk}=
[So]*'
{dT0}. Evaluating {dk} for the
current set of values we get
This implies that
dk{ 9.748E-02
dk2 -6.511E-02
kf = *,(l + <fc,)= 298.017
,nirw_ k2(\ + dk2) = 201.065
Tne new values of kj and k2 are within 1% of the stiffness values of the
experimental model. It required four iterations to arrive at a good correlation.
2- 17

C. Wada-Kuo Method:
In this section we illustrate the procedure which employs the change in structural
matrices for a known change in parameter, and eigenvector difference between
experimental and analytical models to generate the model update parameters. The
eigenvalues and eigenvectors are same as in Table 2.1 and the resultant model update
parameters will be compared with the model update parameters obtained in the previous
section. The values that are computed to satisfy the equation (6-90) are used to obtain the
model update parameter.
dT^dX,-{d<S>}T
(K-X,M]{d<Z>} = {o? [</]{<&?} (6-90)
Consolidating the difference between the experimental and analytical eigenvectors we
get JO = <&e -Oa
dx J02 J03
-2.261E-02 4.642E-02 4.900E-02
-1.967E-02 -7.101E-02 3.956E-02
2.126E-02 -1.265E-02 -4.521E-02
This implies that the transpose of [c/O] is
[H>r-
-2.261E-02 -1.967E-02 2.126E-02
4.642E-02 -7.101E-02 -1.265E-02
4.900E-02 3.956E-02 -4.521E-02
2-18

The mass matrix for the test case is
evil =
25 0 - 0
0 25 0
0 0 25
and the stiffness matrix is
[K] =
200 -100 0
-100 200 -100
0 -100 100
The analytical eigenvalues from Table 2.1 are
X, 7.922E-01
X, 6.220E+00
X, | 1.299E+01
The matrices [ K - Xt M ] can be evaluated for various values of A.,-
For Xj we get
[ h M ] =
19.806 0 0
0 19.806 0
0 0 19.806
Similarlv for X, we set
[ k3 M ]=
155.496 0 0
0 155.496 0
0 0 155.496
2-19

and for X3 we get
[X;M] =
324.698 0 0
0 324.698 0
0 0 324.698
Denoting P,=
[ K - X,- M ] for ease of representation we get
[Pll=
180.194 -100 0
-100 180.194 -100
0 -100 80.194
PPzl =
44.504 -100 0
-100 44.504 -100
0 -100 -55.496
[Pj]=
-124.698 -100 0
-100 -124.698 -100
0 -100 -224.698
To compute the LHS of eqn (6-90) we need {A}r[K-XVt]{A<t>}. Computing [P, ] {dO;}
we get
[Pil {dO,} =
-2.1071
-3.4093
3.6718
[Pzl (d02) =
9.1671
-6.5368
7.8035
2-20

[Pjj {*<*>}} =
-10.0655
-5.3112
6.2032
Therefore we have
{dO^rp,] {dO(}= 1.9276E-01
(d02}T[P2] (dO:) =7.9097E-01
(d03}T
[P3] {d03}=-9.8373E-01
Substituting the values of{dOJ1
[PJ {dOJ to obtain the LHS of eqn. (6-90) and
representing as
This implies that
{dTiy)l = 0.8708 - 1.9276E-01 = 0.67809
{dTw)1 = 2.9573 - 7.9097E-01 = 2.16632
(JT[K)3= 12.1719 --9.8373E-01 =13.1556
This completes the LHS of eqn. (6-90).
2 -21

To calculate the sensitivity matrix for the Wada-Kuo method, we use
JO,") [AAf] (of) . The experimental eigenvectors are consolidated into a matrix form,
for ease of computation, and the matrix manipulations are performed. The diagonal terms
of the resultant matrices are of significance as they are the sensitivity coefficients.
Computing the RHS of eqn. (6-90)
The eigenvectors of the experimental model are {Oe}
4.299E-02 -1.010E-01 1.672E-01
9.853E-02 -1.366E-01 -1.078E-01
1.687E-01 1.055E-01 2.039E-02
The transpose of the experimental eigenvectors is
(3>e}T
4.299E-02 9.853E-02 1.687E-01
-1.010E-01 -1.366E-01 j 1.055E-01
1.672E-01 -1.078E-01 2.039E-02
We know that for a change of 5ki in k! we have
[AK, ]=
1 0 0
0 0 0
0 0 0
Similarly, for a change of 5k2 in k2, the corresponding change in [K] is [AK2 ]
[AK, ]=
1 | -1 0
-1 1 0
0 0 0
1 .">-)

Therefore we have
[AK, J{Oe}=
4.299E-02 -1.010E-01 1.672E-01
0.000E+00 O.OOOE+00 O.OOOE+OO
0.000E+00 O.OOOE+00 O.OOOE+OO
and
[AK2 ] {Oe} =
-5.554E-02 3.563E-02 2.750E-01
5.554E-02 -3.563E-02 -2.750E-01
0.000E+0O O.OOOE+00 0.000E+00
This implies that
{Oe}T
[AK, 1 {Oe} =
1.848E-03 -4.341E-03 7.187E-03
-4.341E-03 1.020E-O2 -1.688E-02
7.187E-03 -1.688E-02 2.796E-02
and
{Oe}T[AK2]{Oe}=
3.085E-03 -1.979E-03 -1.528E-02
-1.979E-03 1.270E-03 9.800E-03
-1.528E-02 9.800E-03 7.565E-02
Consolidating the diagonal terms of the matrices we get
dr, for Ski Sk2
/ = / 1.848E-03 3.085E-O3
i = 2 1.020E-02 1.270E-03
i = 3 2.796E-02 7.565E-02
2-23

For a change in stiffness of 5k!=
5k2=
0.01, computing the sensitivities
S =dT,
'tf [ /Bkand expressing as matrix [ Sw ] we get
j-1 j'2
[Sw]=
1.848E-01 3.085E-01 / = /
1.020E+00 1.270E-01 / = 2
2.796E+00 7.565E+00 /=5
With the generation of the sensitivity matrix, the model update parameters can
now be computed using eqn. (6-1 07b). That is
\dkx
\dk,= [S] {<ffV}
To compute the inverse of the rectangular matrix [Sw] we need to employMoore -
Penrose method. See eqn. (3-35) for details.
The transpose of [Sw] is
[SwlT= 1.848E-01 1.020E+00 2.796E+00
3.0S5E-01 1.270E-01 7.565E+00
Therefore we get
[[Sw]T[Sw]]= 8.889
21.333
2-24

This implies that
[iswr[Swirl= 1.05163096 -0.3913045
-0.3913045 0.1630435
This implies that
[Sw]"1= 7.361E-02 1.023E+00 -2.017E-02
-2.201E-02 -3.783E-01 1.394E-01
For the computed values of LHS we have
ra =
0.67809
2.16632
13.1556
This implies that
dki 1.999998842
dk2 1.000000487
Therefore the model update parameter changes give the new stiffness values as
k?"
= kx{l + dkx) = 299.999
imrw_ k2{\ + dk2) = 200.000
The stiffness of the experimental model was kj= 300.00 and k2
= 200.00. The
application of Wada-Kuo method results in convergence between the analytical and
experimental models in one iteration.
2-25

APPENDIX 3
Cross -
Orthogonality Check
~ Detailed procedures ~

The Example problem that is illustrated here is an 8 mass, 9 spring model. MAPLE V
was used to compute the system equations and the Program CHOLJAC.FORt17'
was used
to get the eigenvalues and the eigenvectors of the system. The eigenvectors were input
into Microsoft Excel 5.0 to perform the Cross-Orthogonality check and other necessary
matrix manipulations As the model was an 8 DOF system matrices the system matrices
were 8x8.
/
kx Ei k2 k3 E2 k4 k5 E3 k^ k7 E<* k8 k9
-\-
vt\x-\-
m2-\-
m3-\-
m4-\~
m5-A/~
m6-/V~
m7-^V"
ms"A/~
\
S
sFi F: F3 F4 F5 F6 F7 F3
k
Figure 3 (Repeated)
The commands as used in MAPLE are shown in Bold-Italics along with the default
prompt of MAPLE (>). The output of MAPLE is shown in Regular italic and the
command definitions are in regular text.
> with(linalg):
The command withflinalg) is required to activate the linear algebra capabilities of
MAPLE.
> k:=array(sparse, 1..8,1..8):
> m.-=array(sparse, 1..8J..8):
3-1

The [K] and [M] matrices are defined as sparse matrices to make input easier.
Instead of assigning all 64 elements of an 8 x 8 matrix, only the non-zero elements are
assigned. Defining the elements kl to kn and ml to mn as variables
> kl:=kl: k2:=k2: k3:=k3: k4~k4: k5:=k5: k6:=k6: k7:=k7: k8:=k8: k9:=k9:
> ml:=ml: m2:=m2: m3:=m3: m4:=m4: m5:=m5: m6:=m6: m7:=m7: m8:-m8:
> m9:=m9:
Assigning elements of the [K] matrix as variables
>kfl,lj:= kl+k2: kfl,2J:= -k2:
> k{2,l]:= -k2:k[2,2]~
k2+k3: kf2,3J:= -k3:
>k[3,2]~
-k3:kf3,3J:= k3+k4: k[2,3]:= -k4:
> k[4,3J:=-k4:
k[4,4]:= k4+k5: k(2,3]:= -k5:
> k[5,4J:= -k5: k[5,5]:= k5+k6: k[2,3J:= -k6:
> k[6,5J:= -k6: k[6,6]:= k6+k7: k[2,3]:= -k7:
> k[7,6/:= -k7: k[7, 7J:= k7+k8: k[2,3J:= -k8:
> k[8, 7/:= -k8: k[8,8]:= k8+k9:
Assigning the elements of the mass matrix [M] as variables
>m[l,l]:=ml:m[2,2J"
m2:m[3,3]:~
m3:m[4,4]:= m4:
> m[5,5]:= m5: m[6,6]:- m6:m[7,7J:=
m7:m[8,8]~
m8:
3-2

Evaluating the stiffness matrix and assigning it to K
> K:=evalm(k);
K:=
r +k2 -k2 0 0 0 0 0 0
-k2 k2 + k3 -k3 0 0 0 0 0
0 -k3 k3-k4 -k4 0 0 0 0
0 0 -k4 k4 + k5 -k5 0 0 0
0 0 0 -k5 k5 - k6 -k6 0 0
0 0 0 0 -k6 k6-k7 -k7 0
0 0 0 0 0 -k7 k7^k8 -k8
0 0 0 0 0 0 -k8 k8 + ik9
Similarly evaluating the mass matrix and assigning it to M
>M:=evalm(m);
M:=
ml 0 0 0 0 0 0 0
0 m2 0 0 0 0 0 0
0 0 m3 0 0 0 0 0
0 0 0 m4 0 0 0 0
0 0 0 0 m5 0 0 0
0 0 0 0 0 m6 0 0
0 0 0 0 0 0 m7 0
0 0 0 0 0 0 0 m8
Using the values of spring stiffness and masses for the present example from section 3.6.
The following command defines values to the mass and stiffness variables.
> kl:=1.0: k2:= 3.0: k3:=9.0: k4:=11.0: k5:=7.0: k6:=5.0: k7:=6.0: k8:= 4.0: k9:=8.0
> ml:=2.5: m2:=3.8: m3:=5.0: m4:=3.0: m5:=5.9: m6:=7.0: m7:=3.0: m8:= 4.9
j - j

Computing the inverse ofmass matrix to obtain the characteristic equation.
> minv:=inverse(m);
minv:
0.40000 0 0 0 0 0 0 0
0 0.26316 0 0 0 0 0 0
0 0 0.20000 0 0 0 0 0
0 0 0 0.33333 0 0 0 0
0 0 0 0 0.16949 0 0 0
0 0 0 0 0 0.14286 0 0
0 0 0 0 0 0 0.33333 0
0 0 0 0 0 0 0 0.14286
Evaluating the stiffness matrix and assigning it to K, we get
> K:=evalm(k);
4.0 -3.0 0 0 0 0 0 0
-3.0 12.0 -9.0 0 0 0 0 0
0 -9.0 20.0 11.0 0 0 0 0
Y'0 0 -11.0 18.0 -7.0 0 0 0
A..
0 0 0 -7.0 12.0 -5.0 0 0
0 0 0 0 -5.0 11.0 -6.0 0
0 0 0 0 0 -6.0 10.0 -4.0
0 0 0 0 0 0 -4.0 12.0
Similarly
>M:=evalm(m);
2.5 0 0 0 0 0 0 0
0 3.8 0 0 0 0 0 0
0 0 5.0 0 0 0 0 0
M: =0
0
0
0
0
0
3.0
0
0
5.9
0
0
0
0
0
0
0 0 0 0 0 7.0 0 0
0 0 0 0 0 0 3.0 0
0 0 0 0 0 0 0 4.9
3-4

The characteristic equation of the system is assigned to"Ch"
and the solution of
Ch gives eigenvalues. For each eigenvalue a corresponding eigenvector is generated
through "eigenvects"
command.
> Ch:-multiply(minv,k);
1.6000 -1.2000 0 0 0 0 0 0
-0.7895 3.15789 -2.3684 0 0 0 0 0
0 -1.8000 4.00000 -2.2000 0 0 0 0
0 0 -3.6666 5.99999 -2.3333 0 0 0
0 0 0 -1.1864 2.03389 -0.8475 0 0
0 0 0 0 -0.7143 1.57143 -0.8571 0
0 0 0 0 0 -2.0000 3.33333 -1.3333
0 0 0 0 0 0 -0.8163 2.44899
Ch:=
The"Eigenvals"
command is employed to obtain the eigenvalues of the characteristic
equation. The syntax is as given below
> eigenvals(Ch);
8.572185373, .08450975232, .5474014053, 1.383054367, 2.469394207, 4.650361907,
4.444164627. 1.994462949
The eigenvectors of the characteristic equation are assigned to Evecs. Each
eigenvector can be displayed using Evecs[i], where '/'
is the mode number.
3-5

> Evecs:=eigenvects(Ch):
> EvecsflJ;
[4.444164627, 1, {[-.1543576814 .3658488815 .1472369399 -.2696047945
.05160347143 .2306805492 -.8161346128 -.3339200755]}]
> Evecs[2J;
[1.383054367, 1, {[7804956095 .1411042644 -.1544249080 -.2991405751
-.3492390481 .1505826607 .3241260784
.2482282147]}]
> Evecs[3];
[5474014053, 1, {[-.4883892848 -.4283982323 -.3093876560 -.1350338953
.1706296214 .4883431265 .4412313879
.1894157652]}
> Evecs[4J;
[1.994462949,1, {[-.6260615426 .2057983992 .3097808618 .1140181266
-.2910682830 -.1731698677 .3280231761
.5891401907]}]
Evecs[5J;
[2.69394207, 1, {[-.4212567654 .3051984936 .2291401940 -.09028817235
-.4966939965 .3816471143 .01408800571
-.5633422852]}]
Evecs[6J;
[8.572185373, 1, {[-.03752324977 .2180158798 -.4858839215 .8314194402
-.1529959411 .01640381014 -.006482315146.0008642018545]}]
> Evecs[7J;
[4.650361907, I, {[-.2493775598 .6339098341 -.3163342024 -.4251390833
.2511892163 -.1803336596 .4384501873
-.1625880800]}]
> Evecs[8J;
[08450975232, 1, {[.3376649703 .4264399753 .4408154551 .4356439382
.4117389139 .3372126517 .2418600507
.08350149927]}]
3-6

Using the values obtained through MAPLE V for the system matrices and eigenvalues,
we have
The mass matrix for the 8 mass model is
[Ml-
1 2 3 4 5 6 7 8
2.500 0.000 0.000 0.000 0.000 0.000 0.000 0.000
0.000 3.800 0.000 0.000 0.000 0.000 0.000 0.000
0.000 0.000 5.000 0.000 0.000 0.000 0.000 0.000
0.000 0.000 0.000 3.000 0.000 0.000 0.000 0.000
0.000 0.000 0.000 0.000 5.900 0.000 0.000 0.000
0.000 0.000 0.000 0.000 0.000 7.000 0.000 0.000
0.000 0.000 0.000 0.000 0.000 0.000 3.000 0.000
0.000 0.000 0.000 0.000 0.000 0.000 0.000 4.900
Similarly the stiffness matrix is
[K]=
1 2 3 4 5 6 7 8
4.000 -3.000 0.000 0.000 0.000 0.000 0.000 0.000
-3.000 12.000 -9.000 0.000 0.000 0.000 0.000 0.000
0.000 -9.000 20.000 -11.000 0.000 0.000 0.000 0.000
0.000 0.000 -11.000 18.000 -7.000 0.000 0.000 0.000
0.000 0.000 0.000 -7.000 12.000 -5.000 0.000 0.000
0.000 0.000 0.000 0.000 -5.000 11.000 -6,000 0.000
0.000 0.000 0.000 0.000 0.000 -6.000 10.000 -4.000
0.000 0.000 0.000 0.000 0.000 0.000 -4.000 12.000
3-7

The inverse of the mass matrix is
[M]-1=
0.400 0.000 0.000 0.000 0.000 0.000 0.000 0.000
0.000 0.263 0.000 0.000 0.000 0.000 0.000 0.000
0.000 0.000 0.200 0.000 0.000 0.000 0.000 0.000
0.000 0.000 0.000 0.333 0.000 0.000 0.000 0.000
0.000 0.000 0.000 0.000 0.169 0.000 0.000 0.000
0.000 0.000 0.000 0.000 0.000 0.143 0.000 0.000
0.000 0.000 0.000 0.000 0.000 0.000 0.333 0.000
0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.204
The characteristic equation of the system is
[M]"1[K]=
1.600 -1.200 0.000 0.000 0.000 0.000 0.000 0.000
-0.789 3.158 -2368 0.000 0.000 0.000 0.000 0.000
0.000 -1.800 4.000 -2.200 0.000 0.000 0.000 0.000
0.000 0.000 -3.667 6.000 -2.333 0.000 0.000 0.000
0.000 0.000 0.000 -1.186 2.034 -0.847 0.000 0.000
0.000 0.000 0.000 0.000 -0.714 1.571 -0.857 0.000
0.000 0.000 0.000 0.000 0.000 -2.000 3.333 -1.333
0.000 0.000 0.000 0.000 0.000 0.000 -0.816 2.449
The solution, mainly the eigenvectors, of the system was obtained using the
programCHOUAC.FOR[171
. The program outputs eigenvectors that have to be mass
normalized as the mass normalized eigenvectors are used to perform the Cross-
Orthogonality check.

The eigenvalues of the system are:
X, X, X, h X1
0.0845 0.5474 1.3830 1.9940 2.4690 4.4440 4.6500 8.5720
Eigenvector set of the system is
[OJ =
0.3319 -0.4830 0.7598 -0.5932 0.4132 -0.1446 0.2441 -0.0373
0.4210 -0.4199 0.1374 0.1957 -0.3003 0.3430 -0.6206 0.2183
0.4352 -0.3035 -0.1510 0.2939 -0.2243 -0.1380 0.3093 -0.4854
0.4295 -0.1313 -0.2916 0.1078 0.0892 -0.2531 0.4166 0.8316
0.4051 0.1666 -0.3405 -0.2768 0.4870 0.0476 -0.2448 -0.1530
0.3327 0.4800 0.1474 -0.1657 -0.3733 0.2225 0.1723 0.0158
0.2389 0.4337 0.3159 0.3101 -0.0102 -0.7887 -0.4156 -0.0068
0.0826 0.1863 0.2419 0.5582 0.5516 0.3234 0.1539 0.0005
Therefore the transpose of the eigenvector set is
[0]T=
0.332 0.421 0.435 0.430 0.405 0.333 0.239 0.083
-0.483 -0.420 -0.304 -0.131 0.167 0.480 0.434 0.186
0.760 0.137 -0.151 -0.292 -0.341 0.147 0.316 0.242
-0.593 0.196 0.294 0.108 -0.277 -0.166 0.310 0.558
0.413 -0.300 -0.224 0.089 0.487 -0.373 -0.010 0.552
-0.145 0.343 -0.138 -0.253 | 0.048 0.223 -0.789 0.323
0.244 -0.621 0.309 0.417 | -0.245 0.172 -0.416 0.154
-0.037 0.218 -0.485 0.832 -0.153 0.016 -0.007 0.001

EigenvectorMass Normalization Procedure:
The eigenvectors for the Cross-Orthogonality check must be mass normalized. For more
information refer to section 3.3. 1.2. To obtain the mass normalized eigenvectors from the
eigenvector matrix [O], we perform the following steps
[M][0]=
0.82975 -1.2075 1.8995 -1.483 1.033 -0.3615 0.61025 -0.0931
1.5998 -1.5956 0.52212 0.74366 -1.1411 1.3034 -2.3583 0.82954
2.176 -1.5175 -0.755 1.4695 -1.1215 -0.69 1.5465 -2.427
1.2885 -0.3939 -0.8748 0.3234 0.26757 -0.7593 1.2498 2.4948
2.39009 0.98294 -2.009 -1.6331 2.8733 0.28084 -1.4443 -0.9027
2.3289 3.36 1.0318 -1.1599 -2.6131 1.5575 1.2061 0.11032
0.7167 1.3011 0.9477 0.9303 -0.0307 -2.3661 -1.2468 -0.0204
0.40469 0.91287 1.18531 2.73518 2.70284 1.58466 0.75411 0.00249
and
[0]T[M][0]=
4.39701 0.00017 -0.0003 -3E-05 -0.0002 -9E-05 0.00013 -5E-05
0.00017 4.27642 -0.0003 -0.0002 8.9E-05 -0.0001 8.7E-05 -2E-04
-0.0003 -0.0003 3.30632 -0.0002 -1E-05 -0.0002 -0.0002 -1E-05
-3E-05 -0.0002 -0.0002 3.9515 -1E-06 -0.0001 -2E-05 -1E-04
-0.0002 8.9E-05 -1E-05 -1E-06 4.91091 -6E-05 5E-05 8E-05
-9E-05 -0.0001 -0.0002 -0.0001 -6E-05 3.52527 -4E-05 4E-07
0.00013 8.7E-05 -0.0002 -2E-05 5E-05 -4E-05 3.80712 -1E-05
-5E-05 -0.0002 -1E-05 -0.0001 8.3E-05 4E-07 -1E-05 3.5773
The diagonal elements of the matrix [0]T[M][0] are the values of "mi"
needed for mass
normalization. Consolidating the values in the table, we get
-10

| mi m2 m3 m4 m5 m6 m7 j m8
| 4.397 4.276 3.306 3.952 4.911 3.525 3.807 3.577
The mass normalization is accomplished by dividing each element of an eigenvector
{O,} with the square-root of the corresponding "m; ". The square-roots of the "mi"
is
4\ 1 4?. j V7 V^T J^ J%/ r
V7^
2.097 2.068 1.818 j 1.988 | 2.216 1.878 1.951 1.891
The mass normalized eigenvector set given by (0;]/,Jrn~
is
[>rl =
0X | o2 | o3 o; o5 06 07 o3
0.15828 -0.2336 0.41786 -0.2984 0. 1 8646 -0.077 0.1251 -0.0197
0.20077 -0.2031 0.07556 0.09845 -0.1355 0.18268 -0.3181 0.11542
0.20754 -0.1468 -0.083 0.14785 -0.1012 -0.0735 0.15852 -0.2566
0.20483 -0.0635 -0.1604 0.05423 0.04025 -0.1348 0.21351 0.43968
0.19319 0.08056 -0.1873 -0.1392 0.21976 0.02535 -0.1255 -0.0809
0.15866 0.23211 0.08106 -0.0834 -0.1685 0.1185 0.08831 0.00833
0.11393 0.20972 0.17373 0.156 -0.0046 -0.4201 -0.213 -0.0036
0.03939 0.09009 0.13303 0.28081 0.24891 0.17224 0.07888 0.00027
Eigenvector Partitioning:
Considering only the first four (4) modes and partitioning the eigenvectors into A-set and
O-set, we get
[A]=
0! j o: 1 o3 j *4 !0.1583 -0.2336 0.4179 -0.2984
0.2075 -0.1468 -0.0830 0.1478
0.1932 0.0806 -0.1873 -0.1392
0.1139 0.2097 0.1737 0.1560
3-11

and
[0]=
o, o2 <t>3 *4
0.2008 -0.2031 0.0756 0.0984
0.2048 -0.0635 -0.1604 0.0542
0.1587 0.2321 0.0811 -0.0834
0.0394 0.0901 0.1330 0.2808
Steps to generate the TransformationMatrix:
The transpose of the A-set is
[A]T=
o,T
0.1583 0.2075 0.1932 0.1139
o2T
-0.2336 -0.1468 0.0806 0.2097
o3T
0.4179 -0.0830 -0.1873 0.1737
o4T
-0.2984 0.1478 -0.1392 0.1560
Therefore the product of [A] and [A] is
[ATA]=
0.11843 -0.028 0.03252 -0.0257
-0.028 0.12657 -0.0641 0.0695
0.03252 -0.0641 0.24675 -0.0838
-0.026 0.069 -0.084 0.155
The inverse of [ATA] is
[ATA]-1=
9.06488 1.38055 -0.6567 0.52884
1.38055 11.0952 1.32715 -4.0382
-0.6567 1.32715 5.20138 2.11305
0.52884 -4.0382 2.11305 9.51456
-12

The product of[ATA]"'
and[A]T
is
(ATAj-l[A]T=
0.68013 1.81147 1.91179 1.29071
-0.6133 -2.0491 1.47434 2.08484
1.12895 -0.4506 -1.2882 1.43679
-0.9295 1.93366 -1.9437 1.06471
Let us denote Dm such that fpm] =
P>.I =
0.25489 0.93608 -0.2042 0.0492
-0.0532 0.67826 0.39915 -0.0407
0.13454 -0.3859 0.70314 0.71643
-0.1393 0.36979 -0.5091 0.72878
The transformation matrix is obtained by augmenting [Dm] with an [I] as shown
rrj-
1.00 0.00 0.00 0.00
0.25489 0.93608 -0.2042 0.0492
0.00 1.00 0.00 0.00
-0.0532 0.67826 0.39915 -0.0407
0.00 0.00 1.00 0.00
0.13454 -0.3859 0.70314 0.71643
0.00 0.00 0.00 1.00
-0.1393 0.36979 -0.5091 0.72878
The transpose of the transformation matrix is
[TJT
=
1.00 0.2549 0.00 -0.053 0.00 0.1345 0.00 -0.139
0.00 0.9361 1.00 0.6783 0.00 -0.386 0.00 0.3698
0.00 -0.204 0.00 0.3992 1.00 0.7031 0.00 -0.509
0.00 0.0492 0.00 -0.041 0.00 0.7164 1.00 0.7288
3-13

Steps to generate theReducedMassMatrix:
The steps are listed in eqns (3-28) to (3-30)
[M.11TJ-
2.50 0 0.00 0
0.97 3.5571 -0.78 0.187
0 5 0 0
-0.16 2.0348 1.1975 -0.122
0 0 5.9 0
0.9418 -2.701 4.922 5.015
0 0 0 3
-0.682 1.812 -2.494 3.571
Reduced mass matrix [M^] is given by PVTrMjrTnJ
[>Ur]=
2.9771 0.1826 0.7481 0.2315
0.1826 11.422 -2.736 -0.523
0.7481 -2.736 11.267 1.6215
0.2315 -0.523 1.6215 9.2095
Experimental Eigenvector:
The experimental eigenvector set is
[E] =
0.1583 -0.2336 0.4179 -0.2984
0.2075 -0.1468 -0.0830 0.1478
0.1932 0.0806 -0.1873 -0.1392
0.1139 0.2097 0.1737 0.1560
Note: To demonstrate the Cross-Orthogonality check procedure the analytical
eigenvector (A-set) values were used for the experimental eigenvector set.
3-14

Cross-Orthogonality Checkprocedure:
The Cross-Orthogonality Check is given by [C^]=[E]T
[Maar] [A]. See section 3.4 for
details.
[MW][A] =
0.68 -0.613 1.129 -0.929
1.8114 -2.049 -0.451 1.93378
1.912 1.4746 -1.288 -1.944
1.2907 2.0847 1.4365 1.0645
Therefore the Cross-Orthogonality check is
[Coorl=
1.000 0.000 0.000 0.000
0.000 1.000 0.000 0.000
0.000 0.000 1.000 0.000
0.000 0.000 0.000 1.000
3-15

APPENDIX 4
Source Code of COMPARE Program

*SUBJECT : Program Description
*The following program was written to compute the transformation Matrix to perform
*the Mass Matrix reduction. The reducedMass Matrix is essential for performing the
*Cross Orthogonality check. The resultant matrix ofCross-Orthogonality check should
*be an Identity matrix for well matched data sets.
*
*
PROGRAM COMPARE
*AUTHOR: FEROZ AHMED
*
*ADVISOR: Dr. RICHARD BUDYNAS
*
*DATE: 28th APRIL 1995
*The main program calls various subroutines that perform individual functions to
*generate the final transformation matrix.
*
*If the program is not executing properly. Then check for the variables NRF, NRE,
*MMX in the file SIZE.DEM which defines the size of the matrices through the
*command "INCLUDE". Also check for the variablesMX AND NMAT.
*****************************************************j*******************
(I) The Main program needs the following:
*
(la) A STAR ASCII file containing coordinates, eigenvectors and eigenvalues of the
*experimental model. The procedure to generate the ASCII file is detailed in the
* SMS - STAR manual.
*
*
(lb) An OUTPUT4 file which contains eigenvectors, eigenvalues, Mass Matrix and
* Stiffness Matrix. An OUTRUN file is a binary file generated by the OUTPUT4*
routine in NASTRAN.
*
*
(Ic) The NASTRAN DATA file containing the coordinates of the Finite element
*model. The data must be in the restricted format of (A6,I10,9X,3F8.5).
*
************************************************************************
*
*
(a) The Call REXCR- Read experimental models Coordinates
*
* The subroutine REXCR reads the coordinates of the experimental model from the
*ASCII (*.ASC) file specified that was generated by STAR. The file should be
4-1

*present in the same directory as the Main program.
*
*
(b) The Call RFMCR - Read Finite element models Coordinates
* Subroutine RFMCR reads the coordinates from the NASTRAN data file. The*coordinates must have to be in the spaced format (Ref Ic). The file format with comma
*as separators or any other format (other than specified format) is not compatible.
*
*
(c) The Call SPSRH - Performs the Spherical search
*
*The spherical search finds the closest FE node to the experimental node. This is
*achieved by finding the lowest sum of the squares of the difference in the respective
*coordinates (X,Y and Z). The subroutine SPSRH also assigns the locations of the
*eigenvectors that will be read in by the Main program.
*
*The above procedure needs to be explained in greater detail later.
*
*
(d) The Call RDBN - Reads the binary output file generated by OUTPUT4. The*subroutine reads the Binary file and stores files as follows:
*
*
(i) The mass matrix as MGG.OUT.*
(ii) The stiffness matrix as KGG.OUT*
(iii) The eigenvectors of all the FEM nodes (6 DOF) as PHTVO.OUT.
(e) Finding eigenvectors ofFE corresponding to the Experimental eigenvectors*
*The main program reads the corresponding nodes between experimental and FE model.
*The corresponding eigenvectors from the PHTVO.OUT are extracted and stored in
*
A.OUT; the rest of the eigenvectors are stored in PHIO.OUT.*
*
(0 Call TRNSP2 - Transposes matrix.*
*Transpose of a transforms a matrix from a matrix of order (mxn) to a matrix of (nxm).
*The multiplication of a non-square matrix with its transpose gives a square matrix.
*
*
(g) Call MATPLY - Matrices Multiply.*
*The subroutine called MATPLY to performs matrix multiplication. Presently three
*different MATPLY routines are being used as the data output of each is stored in a
*
temporary memory, to minimize hard disk space requirements.*
*
(h) Finding the inverse of a Matrix.
4-2

*The inverse of the matrix is being computed by using the IMSL routines. Attempts to
*write a program to accomplish the matrix inverse on the double
*precision data have been unsuccessful. With the ready availability of the
*IMSL and the ease of linking, we will continue to use IMSL routine.
* The use of the double precision is to enhance the accuracy of the results.*The use of double precision has shown its benefits in the computation. It
*takes a little longer to compute versus the use of single precision numbers.
*But the time difference is negligible for our applications.
The Coordinates of the Experimental Model are XE, YE, ZE and the Coordinates
of the Finite ElementModel are XF, YF, ZF
*The applicable set of eigenvectors
"ASET"
is matrix 'A of order say [n x m]*The transpose of [A] is called [AT] of size [m x n] .
*The product of [AT] and [A] is called [ATA] a [m x m] matrix
The inverse of [ATA] is called [ATAI] also a [mxm] matrix.
*
Say the matrix'PHTVO'
is oforder [(p+n) x (m)],[PHIVO] contains all the*Eigenvectors.
*
*Matrix PHIO is of [p x m]. [PHIO] contains the
'Omitted'
set.
*
*The product of [ATAT] and [AT] is called [ATAIAT] of [m x n].
*
* The product of [PHIO] and [ATAIAT] is pM] matrix of order [pxn].
*
[DM] is augumented with a [n x n] identity matrix resulting in*
[TM],*the unit vectors occupy the address where the values in the matrix A were
*extracted from. This results in a [(p+n) x n] transformation matrix.
The SMYf^ are the single precision temporary variables
The DMYir are the double precision temporary variables
INCLUDE 'SIZE.DHVf
REALXE(NRE),YE(NRE),ZE(NR),XF(NRT),YF(N^
REALSMYl(6*^IRF,6*NRF),A(NRE,MMX),PfflO(6*^uRF,^IMX),AT(MMX,NRE)
REAL*8DMYl(6*>IRF,6*>niF),DMY2(6*>niF,6*bJRF),DMY3(6*hrRF,6*NRF)
RAL*8DMY4(6*>niF,6*bIRF),DMY6(NuVrX>lMX),ATAI(MNrX>uMX)
4-3

REALX(>TRE>tMX),Y(>JRE,MNrc)7(NR,MMX),R^
REAL P(NRE,MMX),ATA(MMX>uMX)*
INTEGER
^^DEX(NRE),^nDFE(NRE),CREN(NRE),CRFN(NRE),NC(3),NR(3),ROW2
INTEGER C0L,R0W,CRR(NRE),R0W1*
CHARACTER FHN1*12JILN2*12, RESP1*4*
LOGICAL TF,THERE*
COMMON/BLK 1/XE,YE,ZE
COMMON/BLK2/XF,YF,ZF
COMMON/BLKD/DMY1DMY2,DMY3
*
COMMON/BLK5/X,Y,Z,R,T,P*
*The Main program calls subroutine REXCR which reads the ASCII file and saves
*the data in the file TRIAL.OUT which is overwritten in every run.
*If the data in TRIAL.OUT needs to be saved between runs, the contents have be
*copied to another file.
*
OPEN(50,FrLE='TRIAL.OUT,STATUS=TJNKNOWN)*
PRINT *,'ENTER THE FILENAME OF THE STARFTLE
READ(5,'(A12)')FILN1*
*The request on the screen for an user defined STAR data-file is stored.
151 INQUIRE (FILE=FJLN1, EXIST=THERE)IF (.NOT.THERE) THEN
PRINT *, TILE DOES NOT EXIST
PRINT *, 'ENTER NEW FILENAME OR QUIT TO EXIT
READ(5/(A12)')FTLN1
IF ((FELN1 .EQ. 'QUIT) .OR. (FTLNl .EQ. 'quit')) THEN
VL=152
GOTO 152
ELSE
GOTO 151
ENDIF
ENDIF
*
4-4

*The ASCII file name is read and defined to the varaible FLN1
*
PRINT '.ENTER THE FILENAME OF THE NASTRAN DATAFILE'
READ(5,'(A12)')FILN2
*The request on the screen for an user defined NASTRAN data file.
*
153 INQUIRE (FILE=FILN2, EXIST=THERE)IF (.NOT.THERE) THEN
PRINT *, TILE DOES NOT EXIST
PRINT *, ENTER NEW FILENAME OR QUIT TO EXIT
RAD(5,'(A12)')FILN2
IF ((FELN2 .EQ. 'QUIT) .OR. (FILN2 .EQ. 'quit')) THEN
VL=152
GOTO 152
ELSE
GO TO 153
ENDFf
ENDIF
*
*The NASTRAN data file name is read and defined to variable FELN2
*
*
* The subroutine REXCR reads the number of experimental nodes and reads the
*values of the displacements for the corresponding mode; however, the user has
*to key in the maximum number of nodes the file contains.
*
CALL REXCR(FrLNl,NDEX,NEXP,MDNM)*
*The subroutine RFMCR reads the coordinate locations of the FE model from
*FDLN2 and these are required to perform the spherical search.
*
Write(6,*) heading the FEM coordinates'
*
CALL RFMCR(FTLN2,NDFE,NFEM)*
Write(6,*) FTLN2,NFEM*
*The subroutine SPSRH performs the spherical search to locates corresponding
*nodes between the Experimental and the F.E.model and output the reduced
*F.E. eigenvector of the same order as the experimental eigenvector.
*
Write(6,*) 'Performing sphericalsearch'
4-5

CALL SPSRH(NEXP,NFEM,SML,CREN,CRFN)*
WRTTE(50,*)THE CREN AND CRFNARE'
*
D0I=1,NEXP
WRITE(50,*)CRN(I),CRFN(I),SML(I)
END DO
*
* The subroutine RBDN reads the NASTRAN OUTPUT4 file for the Eigen Vectors
*
PRINT *, ENTER THE NUMBER OF MATRICES TO BE READ FROM
FOR011.DAT
PRINT *, ENTER 2 FOR EIGENVECTORS AND MASS MATRIXOR,'
PRINT *, ENTER 3 FOR EVECS, MASS AND STIFFNESS MARTTX
*
*Three large Matrices (in Binary) are output by the OUTPUT4 command ofNASTRAN.
*Matrices generated are ofEigenvectors [PFflVO], Mass [MGG] and Stiffness [KGG]
*The Matrices are read by RDBN subroutine, converted to ASCII and stored.
*
*The Eigenvectors matrix is PHTVO.OUT
*
*The Mass Matrix is MGG.OUT and the Stiffness Matrix is KGG.OUT.*
READ *, NMAT
*
Write(6,*) Heading the binary file FOR01 l.DAT*
CALL RDBN(NMAT,NC,NR)*
*The subroutine SORTR arranges the FEM nodes in the ascending order and orients
*the corresponding experimental nodes in the location matching the location of
*the FEM nodes in the array
*
WRITER,*) 'Performing SORT*
CALL SORTR(NEXP,CRFN,CREN)*
*For selection of the Z direction vectors from the array PHTVO which contains
*all the six DOF for each node use the following addresses:
* The location in the array to be referenced*For X use -5 in place of -N, for Y use -4 in place of -N. This ensure the
*
corresponding vectors are properly read.
4-6

*Example CRR(I)=(6*CRFN(I))-ND0F
*
*Note : Need to automate the CRR(I) routine and to make it more friendly
*
NDOF=3
156 PRINT *,ENTER THE DOF OF THE EIGENVECTORS, DEFAULT ISZDOF*
PRINT *,ENTER -1- FORXDOF-2- FOR YDOF.OR -3- FOR ZDOF*
READ *, NRESP*
Print the response for the user to confirm the value
IF (NRESP .EQ. 1)THEN
NDOF=5
PRINT *,*
THE DOF KEYED BY YOU IS -XDOF- ARE YOUSURE'
ELSE
IF (NRESP .EQ. 2) THEN
NDOF = 4
PRINT *,'
THE DOF KEYED BY YOU IS -YDOF- ARE YOUSURE'
ELSE
PRINT *,'
THE DOF SELECTED IS -ZDOF- ARE YOUSURE'
ENDfF
ENDTF
PRINT *, ENTER -YES- OR ENTER
*
READ(5,'(A4)')RESP1
IF (RESP1 .EQ. 'YES') THEN
PRINT *,'OKAY1
ELSE
GO TO 156
ENDTF
*
print *, resp,ndof, respl*
DO500I=l,NEXP
CRR(I)=(6*CRFN(I)) - NDOF
WRJTE(50,*) CRR(I)
500 CONTINUE
*
*This is assigning the matrix PHTVO to a single precision dummy variable*
Write(6,*) 'Performing PHIVOread'
*
OPEN( 1 0 1 ,FTLE=?HTVO.OUT',STATUS='OLD,)
4-7

*
WRITE(6,*) VR{\) AND NC( 1 )=',NR( I ),NC( 1 )
D0J=1,NC(1)
D0I=1,NR(1)
READ(10l,*)SMYl(U)
END DO
END DO*
CLOSE(lOl)*
*This following computation executes the selection of the eigenvectors picked
*from the PHIVO to form the A matrix and the rest are stored in the PHIO. These
*are however assigned to single precision dummy variables and stored in a file
*that corresponds to the matrix DMY1 and DMY2 which are [A] and [PHIO]
*
respectively at this stage only.*
ROW1=0
ROW2 = 0
*
*
Initializing the variables ROW1 and ROW2*
Write(6,*) "PerformingPartitioning1
D0 1123ROW=l,NR(l)TF = .FALSE.
DOI=l,NEXP
IF (CRR(I) - ROW .EQ. 0) THEN
TF = .TRUE.
END TF
END DO
IF (TF) THEN
ROW1 =ROWl+l
DOCOL=l,MDNM
A(ROWl,COL)=
SMYl(ROW.COL)WRITE(6,*)rMATRTX A IS',TF,ROW,ROWl,COL,A(ROWl,COL)END DO
ELSE
ROW2 = ROW2+l
DO COL = 1,MDNM
PFflO(ROW2,COL) = SMYl(ROW,COL)*
DMY 1 (ROW1 DBLE(SMY 1 (ROW,COL))WRITE(6)*)rMATRTX PHIO IS',TF,ROW,ROW2,COL, PHIO(ROW2,COL)END DO
4-8

END TF
1123 CONTINUE*
***************************************************************
Write(6,*) Performing opening offiles'
*
OPEN( 1 04,FTJLE='ATA.OUT,STATUS=,UNKNOWN')
OPEN(105,FTLE='A.OUT,STATUS='UNKNOWN')OPEN( 106,FTLE=TfflO.OUT,STATTJS='UNKNOWN)
*
OPEN( 107JTLE='AT.OUT,STATUS='UNKNOWN')
OPEN( 108,FTLE='ATAI.OUT,STATUS='UNKNOWN)
OPEN( 1 09,r^E='ATAIAT.OUT,STATUS=TJNKNOWN)
OPEN( 1 10,FILE=DM.OUT,STATUS=UNKNOWN,)OPEN(l 1 l,FILE=TM.OUT,STATUS='UNKNOWN)
OPEN( 1 12,FTLE=TMT.OUT,STATUS='UNKNOWN)*
OPEN(l 13,FTLE='MAAR.OUT,STATUS=UNKNOWN')
OPEN( 1 14JILE='CORR.OUT,STATUS='UNKNOWN)*
* The following variables MDNM is the number ofmodes, NEXP is the number of*experimental nodes which is equal to the rows of the eigenvector, hence
*the [A] matrix. Perform matrix [A] transpose and save it in file AT.OUT
*
DoJ=l>TDNM
Do 1=1,NEXP
AT(J,I)=A(I,J)
End do
End do
*
Do 1=1,NEXP
Write(105,8110) (A(I,J),J=1,MDNM)
END DO
Rewind(105)*
DO 1=1,MDNM
Write( 107,8 110) (AT(I,J),J=1,NEXP)
End do
Rewind(107)*
*Storing the data ofPHIO into a file
4-9

Doi=l,ROW2
Write( 106,8 1 1 0)(PHIO(I,J),J= 1 >QDNM)
End do
Rewind(106)*
*
[AT] multiplied to [A] gives [ATA]*
DO 115 ROW = 1,MDNM
DO 115 COL =1,MDNM
ATA(ROW,COL)= 0.0
*
D0 116K=1,NEXP
ATA(ROW.COL)=
ATA(ROW.COL) + AT(ROW,K)*
A(K,COL)
116 CONTTNUE
115 CONTTNUE
*
Write(6,*) Performed the[ATA]'
*
write(50,*)'[ATA]'
*
*The ATA is stored into a corresponding file ATA.OUT
*
Do 1=1,MDNM
Write(50,81 10)(ATA(I,J),J=1,MDNM)
Write( 104,8 1 10)(ATA(I,J),J=1,MDNM)
End Do
Rewind(104)*
*This is performed to get the correct assignment of the value of the matrix of
*which the inverse is to be computed by the TMSL subroutine DLINRG.
*
DoJ=l,MDNM
Do 1=1,MDNM
DMY6(I,J)=
DBLE(ATA(I,J))*
Write(6,*) DMY6(LJ)
End Do
End Do
*
*Double precision is used for better accuracy and DLINRG subroutine which is
*used for Double Precision is called
*The link statement should have the address of the TMSL routines.
4-10

*The subroutine DLINRG performs the inverse of [ATA] to give [ATAI]
*
Write(6,*) 'Performinginverse'
*
*The following are the arguments in the following call statements
*
DLTNRG(N, A, LDA, ATNV, LDATNV)*N =
order of the matrix (size)*A and ATNV are the names of the Matrix and its inverse
*LDA and LDATNV are the values as mentioned in the dimension statement
CALL DLTNRG(MDNM,DMY6,MMXATAI>1MX)*
*The inverse is computed and stored in a file. Assigning the inverse to the
*another double precision dummy variable which is used in multiplication of
*matrices DMY1 and DMY2 to give DMY3.
*
DO 1=1,MDNM
WRJTE( 108,81 10) (ATAI(I,J),J=1,MDNM)
END DO
*
Do J =1,MDNM
DoI= 1.MDNM
DMY1(I,J)=
ATAI(I,J)
DMY2(I,J)=
DMY6(I,J)
End do
End do
*
*
Assigning [ATA] to a double precision dummy variable and perform the Matrix
*multiplication of [ATA] and [ATAI]. The check is to ascertain the accuracy
*of the Matrix inverse. The product ofDMY1 with DMY2 gives DMY3 (Unit matrix)
*
Call MATPLY(MDNM,MDNM,MDNM)*
Write(50,*)'The ATAImatrix'
DOI=l,MDNM
WRITE(50,81 10) (ATAI(I,J),J=1,MDNM)
END DO
*
Write(50,*)The matrix forcheck'
DOI=l,MDNM
Write(50,81 10) (DMY3(I,J),J = 1,MDNM)
END DO
4- 11

*
Assigning AT to DMY2 for getting the matrix ATAIAT
Write(6,*) Performing ATAIAT
DoJ=l,NEXP
DoI=l>lDNM
DMY2(I,J)=DBLE(AT(I,J))
End do
End do
Rewind(107)*
*
Multiply DMY1 [ATAT] to DMY2 [AT] gives DMY3 [ATAIAT]*
Call MATPLY(>lDNM>iDNM,NEXP)*
Write(50,*)'the matrix ATAIAT
Do 1=1,MDNM
Write(50,81 10) (DMY3(I,J),J=1,NEXP)
Write(109,81 10)(DMY3(I,J),J=1,NEXP) ! Storing the data of into ATAIAT.OUT
End do
Rewind(109)*
DOJ=l,NEXP
DO 1=1MDNM
DMY2(I,J)=DMY3(I,J)END DO
END DO
*
*
Multiply [PHIO] to [ATAIAT] results in PM]*
NRT = NR(1)-NEXP
*
Write(6,*) P.OW2=',ROW2
Write(6,*) 'NRT=',NRT
DoJ=l,MDNM
DoI=l,ROW2
DMYl(LJ)=
DBLE(PFflO(I,J)) ! Assigning PHIO to Double Precision
End do
End do
*
*
Computing the product to give matrix [DM]*DMY1 [PHIO] and DMY2 is [ATAIAT]; Product is DMY3 [DM]
4-12

Call MATPLY(NRT,MDNM,NEXP)*
*
Storing the data to file*
DoI=l,NRT
Write(l 10,81 10) (DMY3(I,J),J=1,NEXP)End do
Rewind(llO)*
*To augment [DM] with a Identity matrix which results in [TM]. The identity
*matrix rows are corresponding to the extracted eigenvector rows from PHTVO
*
Doj=l,6*NRF
Doi=l,6*NRF
DMY4(I,J)=O.0d+00
End Do
End Do
Open( 1 1 9,file='kw.out',status='old')
Write(6,*) PerformingTM'
KNTR=0
D0 125ROW=l,NR(l)
CALL REDTF(ROW,CRR,NEXP,TF)
IF (TF) THEN
KNTR=KNTR+1
DMY4(ROW,KNTR)= 1.0d+00
ELSE
DO COL =1,NEXP
DMY4(ROW,COL)= DMY3(ROW-KNTR,COL)
END DO
END TF
Write(119,*)kntr,row
125 CONTINUE
Close(119)*
DoI=l,NR(l)
WRTTE( 1 1 1,8 1 10) (DMY4(I,J),J = 1.NEXP)
End do
4-13

Do J =1,NEXP
DoI=l,NR(l)
DMY1(J,I)=DMY4(I,J)
End do
End do
Write(6,*) PerformingMAAR'
*
*READ THE MASS MATRIX OF THE F.E. MODEL
*
Ope^^^i^-MGG.OUT.Status^OId')
DoJ=l,NR(l)
DoI=l,NR(l)
Read(102,*) SMYl(ij)
DMY2(iJ)=DBLE(SMYl(ij))End do
End do
Close(102)
CALL MATPLY(NEXP,NR( 1 ),NR( 1 ))
* *MULTIPLY TMTMS TO TM TO GIVE REDUCED MASS MR
DoI=l,6*NRF
Do J=1,6*NRF
DMY1(I,J)=
DMY3(I,J)
DMY2(I,J)=
DMY4(I,J)
End do
End do*
CALL MATPLY(NEXP,NR(1),NEXP)*
* *WRITE THE REDUCED MATRIX
Write(6,*) 'WritingMAAR'
*
Do i=l,NEXP
Write(l 13,8104) (DMY3(I,Jy=l,NEXP)End do
DOI=l,6*NRF
4-14

D0J=1,6*NRF
DMY1(LJ)=DMY3(I,J)End do
End do
Rewind(113)
DoJ=l>CDNM
Do 1=1,NEXP
DMY2(LJ)=DBLE(A(I,J))End do
End do
Rewind(105)
CALLMATPLY(NEXP,NEXP,MDNM)
Doj=l,nexpDo i=l,MDNM
DMY1(I,J)=DBLE(AT(I,J))
End do
End do
*
DO 1=1,6*NRF
DOJ=l,6*NRF
DMY2(I,J)=DMY3(I,J)
End do
End do
*
CALL MATPLY(MDNM,NEXP,MDNM)
DoI=l>EDNM
Write(l 14,81 10) (DMY3(I,J),J=1>1DNM)
End do
CLOSE(114)
CLOSE(113)
CLOSE(112)
CLOSE(lll)
CLOSE(llO)
CLOSE(109)
CLOSE(108)
CLOSE(107)
CLOSE(106)
CLOSE(105)
4-15

CLOSE(104)
8008 FORMAT(A30)8001 FORMAT(Al)8002 FORMAT(8E13.5)
8003 FORMAT(10E13.5)
8104Format(10D13.5)
8110FORMAT(8F10.4)
CIose(50)*
TF(VL.EQ. 152) THEN
152 PRINT *, 'QUITTING AS FILE NOTFOUND'
PRINT *, 'CHECK AND NOTE DOWN THEFILENAME'
ENDTF*
STOP
END
4- 16

SUBROUTINE REXCR(FTLNl,NDEX,NEXP,MDNM)
*The Subroutine is written to read the STAR UNIVERSAL file Format that contains
*data that is used in matrix manipulations with the NASTRAN output files.
INTEGER ANLTYJDATCHR,RESTY,DATTYDATPP,MDNM,MX*
INCLUDE'SIZE.DHM'
*
REAL
XE(NRE),YE(NRE)^E(NT<E),r^REQ(MMX)>10DMAS(MMX),VISDMP(MMX)REAL
RELEGN(MNrX),MGEGN(MMX),RELA(MMX),IMGA(MMX),RELB(MMX)REAL TMGB(MMX),MHYDR(MMX),P(NRE,MMX)REAL X(>TRE,MMX))Y(NRE,MMX),Z(NRE,MMX),R(?fRE,M^
INTEGER NODE(NRE)TTLD 1 ,FTLD2TTLD3,MODNUM,NDEX(NRE)
CHARACTER KEY*6, FTLN1*12
COMMON/BLKl/XE,YE,ZE
COMMON/BLK5/X,Y,Z,R,T,P
*Initialize the value of the KEY to start the search for appropriate KEY that
*proceeds the data type to be read.
Write(6,*)'
THE NUMBER OFMODES'
*
Read(5,*) MX
*
Open(10,FTLE=FILNl, STATUS='OLD*)
K=0
1=0
37 Read( 10,20) KEY
If(KEY(5:6).EQ. '15') Then
35 Read( 10,20) KEY
1 = 1+1
If (KEY(5:6) .EQ. '-1') Go To 36
NEXP = I
Go To 35
Else
d. 17

Go To 37
End If
36 Rewind(lO)
59 Read( 10,20) KEY
* The key number 15 precedes the coordinate data and the values are stored in a
* fixed format and are read in by the Format type 21. The coordinates of the*nodes of the experimental structure are XEXP, YEXP, ZEXP respectively.
*
If(KEY(5:6).EQ. '15') Then
Do 100 1=1,NEXP
Read( 10,21) NDEX(I), XE(I), YE(I), ZE(I)
Write(6,*) NDEX(I), XE(I), YE(I), ZE(I)100 Continue
Else
If(KEY(5:6).EQ. '55') Then
* The KEY number precedes the Modal data and the respective variables are
* defined as follows.
*
*MODTY is Model Type
*1 : Structural
*
*ANLTY is analysis type
*2 : Normal mode
* 3 : Complex Eigenvalue First order*7 : Complex Eigenvalue second order
*
*DATCHR is Data characteristics
*
* 2 : 3 DOF Global translation vector (NDV=3)* 3 : 6 DOF Global translation and rotational vector (NDV=6)
RESTY is response type
*8 : Displacement
*11: Velocity
*12: Acceleration
*
*DATTY is Data type
4-18

*2: Real
*3: Complex
*DATPP is number ofdata values per point (NDV =3 OR 6)
Read( 10,22) MODTY,ANLTYDATCHR,RESTY,DATTY,DATPP
*
Write(6,23) MODTYANLTYDATCHRrRESTYDATTY,DATPP
Read(10,23) FIELD l,FTLD2,FIELD3,MODNUM
*
Write(6,23) FIELD1JTLD2,FTLD3,M0DNTJM
MDNM=MODNUM
If(ANLTY.EQ.2)Then
K=MODNUM
Read( 10,24) FREQ(K),MODMAS(K),VISDMP(K),MHYDR(K)*
Write(6,24) FREQ(K),MODMAS(K),VISDMP(K),MHYDR(K)
Do 102 J =1, NEXP
Read( 10,25) X(K,J),Y(K,J),Z(KJ),R(K,J),T(K,J)P(K,J)*
Write(6,24) X(K,J),Y(KJ),Z(K,J),R(K,J),T(K,J)P(K,J)
102 Continue
If (MODNUM EQ. MX ) Go To 64
Else
K=MODNUM
Read( 10,24) RELEGN(K),IMGEGN(K)JIELA(K),IMGA(K),RELB(K),IMGB(K)
Do 104 J =1, NEXP
Read(10,25)X(K,J),Y(K,J),Z(K,J),R(K,J),T(K,J),P(K,J)
104 Continue
If (MODNUM .EQ. MX ) Go To 64
End TF
4-19

End If
End If
Go To 59
*
* The different read formats are listed below correspond to the respective data*type and field to be read.
20 FORMAT(A6)21 FORMAT(I10,30X,3E13.5)22 FORMAT(/////,6I10)23 FORMAT(8I10)24 FORMAT(6E13.5)25 FORMAT(/,6E13.5)26 FORMAT(/////)64 CLOSE(IO)
RETURN
*
*
END
4-20

SUBROUTINE RFMCR(FTLN2,NDFE,NFEM)*
*
This Program reads the NASTRAN data file which contains the coordinates used*in the spherical search (SPSRH) with the STAR ASCII file.
*
INCLUDE'SIZE.DLM'
*
INTEGER NDFE(NRF)REAL XF(NRF),YF(NRF),ZF(NRF)CHARACTER KEY*6, FTLN2*12
COMMON/BLK2/XF,YF,ZF*
*Initialize the value of the KEY to Start the search for appropriate KEY that
*Precedes the data type to be read.
*
OPEN(15TTLE=FTLN2, STATUS='OLD')*
K = 0
1 = 0
37 Read( 15,8005) KEY
If (KEY(1:3) .EQ.END*
) Go To 64
If (KEY(1:6) .EQ. 'GRID *) Then
Backspace(15)1 = 1+1
Read( 15,80 10) KEY,NDFE(I), XF(I),YF(I),ZF(I)*
Write(6,*) KEY,NDFE(I), XF(I),YF(I),ZF(I)
NFEM = I
End If
Go To 37
*
* The different read formats are listed below which correspond to the respective
*data type and field to be read.
*
8005 Format(A6)8010 Format(A6,I10,9X,3F8.5)
64 CIose(15)Return
End
4-21

SUBROUTINE SPSRH(KEXP,NFEM,SML,CRN,CRFN)*
INCLUDE'SIZE.DIM'
*
INTEGER ROW,COL,CREN(NR),CRFN(NRF)
REALXE(NRE),YE(NRE),ZE(MlE),XF(>rRF),YF(NRF)^F(NRF),SML(NRE)
REALDISQ(MlE,^{RF),XDIFF(^uRE,^^lF),YDIFF(NRE,^^RF),ZDIF^
COMMON/BLKl/XE,YE,ZE
COMMON/BLK2/XF,YF,ZF
DO100COL=l,NFEM
DO 100 ROW =1, NEXP
XDTFF(ROW,COL)=XE(ROW) - XF(COL)
YDTEF(ROW,COL)=YE(ROW) - YF(COL)
ZDTFF(ROW,COL)=ZE(ROW) - ZF(COL)
DTSQ(ROW,COL)= XDIFF(ROW,COL)**2 + YDIFF(ROW,COL)**2 +
+ZDIFF(ROW,COL)**2
*
WRTTE(6,*) XDEFF(ROW,COL),YDIFF(ROW,COL),ZDIFF(ROW,COL)
100 CONTTNUE
*Writes the values ofDISQ to file MR.OUT, NFEM rows labeled Row # and NEXP
*columns upto a maximum often columns per line.
OPEN(20,FILE='MR.OUT',STATUS='UNKNOWN)
DO 120 ROW =1, NEXP
WRTTE(20,*) "ROW^, ROW
WRITE(20,8020)(DISQ(ROW,COL),COL=1,NFEM)120 CONTINUE
CLOSE(20)*
DO 101 ROW = l.NEXP
SML(ROW) = DISQ(ROW.l)101 CONTTNUE*
*Defines the values of the 1st element of the rows ofMatrix DISQ(NEXP,NFEM)
*Matrix to the SML(NEXP) matrix
4-22

DO 102 ROW =1, NEXP
CREN(ROW)= ROW
*
DO 103COL-1.NFEM*
IF (DlSQ(ROW,COL)-SML(ROW)) 222,222,223
222 SML(ROW)=
DISQ(ROW,COL)
CRFN(ROW)= COL
223 CONTTNUE
103 CONTINUE
102 CONTINUE*
DO 1=1, NEXP
WRTTE(6,*)CREN(I),CRFN(T),SML(I)ENDDO
8020 FORMAT(10F8.4)RETURN
END
4-23

SUBROUTINE RDBN(NMAT,NC,NR)
This illustrates the reading and writing ofNASTRAN matrices using OUTPUT4
*
*
*
*
*
*
INCLUDE'SIZE.DTM'
Subroutine GETTDS is a general matrix reader for real matrices the NASTRAN
matrix may be single or double and the return will be ofprecision requested
DIMENSION AMAT(6*NRF,6*NRF), NC(3),NR(3)*
*THIS ASKS FOR A SINGLE PRECISION RETURN C
*
REWIND 11
*
*NCHEK = 0
*1000 WRITE(6,*YNUMBER OF MATRICES TO BEREAD'
*READ (5,100) NMAT
*IF (NMAT .GT. 3) THEN
*NCHEK = NCHEK+l
*IF (NCHEK .GE. 2) THEN
*
WRTTE(6,*) Beyond the scope of read program change size ofNC,NR'
*GO TO 200
*END IF
*WRITE(6,*)'number greater than allowed, check and
retype'
*GO TO 1000
*END IF
*100 FORMAT(I5)
DO 200 11=1, NMAT
CALL GETroS(A^LAT,NCOL,NROW,NF,6*NRF,6*NRF,AMAT,0,l 1)
*
WRITE(6,20) Tf
*20 FORMAT(lHl,llHMATRTXNO.,14)
NC(H)= NCOL
NR(TI)= NROW
WRTTE(6,*) NC(II),NR(II)
IF ( II .EQ. 1)THEN
OPEN( 1 0 1,FTLE=PfflVO.OUT,STATUS='UNKNOWN)
4-24

DO 30 J = l.NCOL
DO 30 1= l.NROW
WRITE(101,*)AMAT(I,J)30 CONTTNUE
CLOSE(lOl)END IF
IF ( H .EQ. 2) THEN
OPEN( 102^TLE=TvIGG.OUT',STATUS=,UNKNOWN')DO40J=l,NCOL
DO40I=l,NROW
WRTTE(102,*) AMAT(LJ)40 CONTINUE
CLOSE(102)END IF
IF ( n .EQ. 3) THEN
OPEN( 1 03 ,FILE=,KGG.OUT,STATUS=TJNKNOWN)DO50J=l,NCOL
DO50I=l,NROW
WRITE(103,*) AMAT(I,J)50 CONTINUE
CLOSE(103)END IF
200 CONTINUE
RETURN
END
SUBROUTINE GETTDS(B,NCOL,NROW,NF,NRB,NCB,DB,IDL,TU)
This routine interprets a matrix written by OUTPUT4. It will handle single or
double precision it will process the sparse or non-sparse forms arguments B.
*Single precision array subscripted by B(NRB,NCB) the matrix will be returned
*inB
*NCOL returned as the actual number of columns ofmatrix
*
*NROW returned as the actual number of rows ofmatrix
*
*NF returned as the form of the incoming matrix
*
* NRB maximum rows in B and DB ARRAYS
4-25

*DB double precision array like B
*
*DDL asks for single return, 1 asks for D.P.
*
*IU is the FORTRAN unit to read
*
INCLUDE 'SIZE-DuVr
*
REAL*8 DB(6*NRF,6*NRF)
REAL B(6*NRF,6*NRF), DR(2)*
*A,DA and IA represent the largest column of a matrix which can be read
*
* The dimension statement here is responsible for the size of the matrix to be
*read and if an error due to size occurs
*
DIMENSION A(2*6*NRF)DA(6*NRF),IA(2*6*NRF)
DOUBLE PRECISION DATJD(l)EQUIVALENCE (A(l), DA(1),IA(1))EQUIVALENCE (DD(1),DR(1))
*
*READ MATRIX DESCRIPTORS
*
READ (IU) NCOL,NROW,NF,NTYPEWRITE(6,*)' IU,NCOL,NROW,NF,NTYPE'
WRITE(6,*) rU,NCOL,NROW,NF,NTYPE
*
* CHECK IF MATRIX IS TOO LARGE
IF (NCOL .GT. NCB .OR. NROW .GT. NRB) GO TO 51
IF (NTYPE * NROW .GT. 2*6*NRF) GO TO 50
C C ZERO B MATRIX C
DO 7 1=1,NCOL
DO 66 J =1,NROW
TF(TDL.EQ. 1) GO TO 67
B(J,I)= 0.0
GO TO 66
4-26

67 DB(J,I) =0.0D0
66 CONTINUE
7 CONTTNUE* FOR EACH COLUMN (ONLY NON- ZERO COLUMN ON FILE)*
DO10I=l,NCOL
READ(IU) ICOL,TROW,NW,(A(K),K=l,NW)*
*
WRITE(6,*)ICOL,IROW,NW,(A(K),K=l,NW)
IF (ICOL .GT. NCOL) GO TO 20
*C C TEST FOR SPARSEMATRIX OPTION C
IF (TROW .EQ. 0) GO TO 30
*C C DENSE MATRIX FORMAT C
IF (NTYPE .EQ. 2) GO TO 100
D0 5J=1,NW
K=TROW+J-l
TF(TDL.EQ. 1) GO TO 8
B(K,ICOL)=
A(J)
GO TO 5
8 DB(KJCOL)=
A(J)
5 CONTTNUE
GO TO 10
* DOUBLE INCOMING MATRIX
100 NW = NW/2
D0 6J=1,NW
4-27

K= IROW+J-1
IF(IDL.EQ. 1)G0T0 11
B(KJCOL)=
DA(J)
GO TO 6
1 1 DB(KJCOL)=
DA(J)
6 CONTINUE
GO TO 10
* SPARSE INCOMINGMATRIX C
30 CONTINUE
NTR=1
32 L = IA(NTR)/65536
TROW = IA(NTR)- L*65536
NTW = L-1
IF (NTYPE EQ. 2) GO TO 40*
C C SINGLE INCOMING MATRIX C*
DO 31 J=1,NTW*
K = TROW+J-l*
TF(TDL.EQ. 1) GO TO 34*
B(K,ICOL)=
A(NTR-J)
GO TO 31
34 DB(K,ICOL) = A(NTR-J)
3 1 CONTINUE
33 NTR = NTR^L
4-28

IF (NTR .GE. NW) GO TO 10
GO TO 32*DOUBLE INCOMING MATRIX C
40 CONTINUE
DO 41 J=1,NTW,2
K = TROW + J/2
DR(1)=
A(NTR+J)
DR(2)=
A(NTR+J+1)
TJF(IDL.EQ. 1) GO TO 42
B(K,ICOL)=
DD(l)
GO TO 41
42 DB(K,ICOL)=
DD(l)
41 CONTINUE
GO TO 33
10 CONTTNUE*THERE IS A DUMMY RECORD FOR THE LAST COLUMN + 1
200 READ(TU)ICOL,IROW,NW,(A(K),K=l,NW)
20 RETURN
50 CONTINUE
WRITE(6,55)55 FORMAT( 1HX,24HNASTRANMATRIX TOO LARGE)51 CONTTNUE
WRTTE(6,71)71 FORMAT(lHX,21HTHE SIZE IS THE ERROR)
STOP
END
4-29

*
*
SUBROUTINE SORTR(NEXP,CRFN,CREN)
INCLUDE 'SIZE.DIM
INTEGER SM2,SMALLPOS,CREN(MlE),CRFN(NRE)
DOK=l,NEXP-l
SMALL =
CRFN(K)SM2 = CREN(K)POS = K
DOI = K+l,NEXP
IF (SMALL .GT. CRFN(I)) THEN
SMALL =
CRFN(I)POS = I
SM2 = CREN(I)END IF
END DO
CRFN(POS)=
CRFN(K)
CRFN(K)= SMALL
CREN(POS)=
CREN(K)
CREN(K)= SM2
END DO
RETURN
END
4-30

SUBROUTINE MATPLY(NRA,NAB,NCB)*
INCLUDE 'STZE.DTM
INTEGER ROW,COL*
REAL'S lVLATA(6*^^lF,6*^^RF),MATB(6*^^RF,6*N^
*
COMMON/BLKD/MATAMATB,MATAB*
D0 21ROW=lrNRA
D0 21COL=l,NCB
MATAB(ROW,COL)=0.0*
D0 22K=1,NAB
MATAB(ROW,COL)=
MATAB(ROW.COL) + MATA(ROW, K)*
MATB(K, COL)22 CONTINUE
21 CONTINUE*
RETURN
END
SUBROUTINE REDTF(ROW,CRR,NEXP,TF)
INCLUDESIZE.DIM'
Integer ROW,CRR(NRE)
Logical TF
DoI=l,NEXP
TF = ( ROW .EQ. CRR(I) )
If(TF)GoTo20
End Do
TF =.FALSE.
20 Return
End
4-31

APPENDIX 5
MSC/NASTRAN Data File and Mode Shape Plots for Plate Model

ID EIGEN, VALUE-VECTOR-DERIVATIVES
TIME 100
$ Initially run the normal mode/dynamic analysis solutions to get data of a normal modes
$ analysis, SOL 3, to check the data file is error free. Then run an optimization routine,
$ SOL 200, with necessary Bulk Data to perform optimization. SOL 200 generates
$ eigenvalue sensitivities during its solution process, but to output the sensitivities the
$ routine requires an ALTER routine. Refer Design Optimization Manual for details.
$ This file has run SOL 200 successfully. The above suggestion is for developing new
$ data files for optimization procedure.
$
SOL 200 $
DIAG 8 S
$ MATPRN MGG.KGG// $
CEND
ECHO = BOTH $
DESOBJ(MTN)= 500
SENSITY = ALL
ANALYSIS =MODES
METHOD = 20 $
DISP=ALLS
ESE = ALL $
TITLE = EIGEN VALUE AND VECTOR DERIVATIVES FOR SENSITIVITY
ANALYSIS
SUBTITLE= THE EXAMPLE IS A 10 X 7 PLATE
BEGIN BULK
,0.0,0.0,0.0,,
,2.5,0.0,0.0,,
,5.0,0.0,0.0,,
,7.5,0.0,0.0,,
,10.0,0.0,0.0,,
,0.0,1.75,0.0,,
,2.5,1.75,0.0,,
,5.0,1.75,0.0,,
,7.5,1.75,0.0,,
,10.0,1.75,0.0,,
,0.0,3.5,0.0,,
,2.5,3.5,0.0,,
,5.0,3.5,0.0,,
,7.5,3.5,0.0,,
,10.0,3.5,0.0,,
,0.0,5.25,0.0,,
,2.5,5.25,0.0,,
GRID, 101(
GRID, 102,,:
GRID, 103,,
GRID, 104,,
GRID, 105,,
GRID, 106,,
GRID, 107,,
GRID, 108,,
GRID, 109,,
GRID, 110,,
GRID 111,,
GRID 112,,
GRID 113,,
GRID 114,,
GRID 115,,
GRID 116,,
GRID H7
5-1

GRTD,1135.0,5.25,0.0
GRID,1197.5, 5.25,0.0,,
GRID, 120,, 10.0,5.25,0.0,,
GRID, 121..0.0,7.0,0.0,,
GRID, 1222.5,7.0,0.0,,
GRID, 1235.0,7.0,0.0,,
GRID,1247.5,7.0,0.0
GRID, 12510.0,7.0,0.0,,CQUAD4.20 1,301, 101, 102,107,106,0$
CQUAD4,202,301, 102,103, 108,107,0$
CQUAD4,203,301, 103,104,109,108,0$
CQUAD4,204,301, 104,105, 110,109,0$
CQUAD4,205,301, 106,107,1 12,1 11,0$
CQUAD4,206,301, 107,108,1 13, 112,0$
CQUAD4,207,301, 108,109,1 14,1 13,0$
CQUAD4,208,301, 109,1 10,115,114,0$
CQUAD4,209,301, 11 1,1 12,1 17, 116,0$
CQUAD4,2 10,301, 112,1 13, 118, 117,0$
CQUAD4,21 1,301, 113, 114,1 19, 118,0$
CQUAD4,212,301, 114, 115, 120, 119,0$
CQUAD4,213,301, 116, 117,122, 121,0$
CQUAD4.2 14,301, 117,1 18,123, 122,0$
CQUAD4,215,301, 113, 119,124, 123,0$
CQUAD4,216,301, 119,120,125, 124,0$
$
PSHELL,301,401,.75,401 $
$
PARAM,AUTOSPC,YES $
$ THE FOLLOWING LINES ARE ADDED TO GET SENSITIVITY OUTPUT
DRESP1,500,WT,WEIGHT
DRESP1,501,DISZ1,EIGN,1
DESVAR,601,TKNS,.75,.60,1.20
DVPRL1,701,PSHELL,301,4,.60+DP1
+DP1,601,1.0
DOPTPRM,TPRINT,2,DESMAX, 1 0,DELP,.05
$ END OF SENSITIVITY DATA
MATl,401,1.0E7.33,2.59E-4 $
DCONSTR,901,501,6.838E7,6.839E7
$
EIGR,20,GIV,3.0E2,3.0E3 $
ENDDATA
5-2

C/5
W
23
Z
fi
Oz
>
o
fi
Z
<3
VO o VO o VO
CN TON T
00 m00 m
c-l
t- cnr- cn
.
>
raNO NO
5-3

"8
a.2
X
^T?
M-^-
5-4

X
^
M-^-
DO

11
^T?
X
4
M-^-
5-6

3 "3
X
N-
5-7

3*
X
M-^-
5-8

II
X
INJ~^-
5-9

11
X
4
5-10

31
X
N-3-
5-11

APPENDIX 6
SMS - STAR Data File and Mode Shape Plots for Plate Model

The following file is the ASCII file format of SMS - STAR software. This file contains
the description (i.e., model's coordinate) and the eigen data of the model. For details on
each field of the file see the SMS Manual under the section titled "Universal File
Format". This tile is for the accompanying mode shape plots. Each section of the file
starts with"-1"
and ends with a"- 1".
1
15
10 0 0 0.00000E+00 0.00000E+00 0.00000E+00
2 0 0 0 2.50000E+00 0.00000E+00 0.000OOE+OO
3 0 0 0 5.00000E+00 0.00000E+00 0.00000E+00
4 0 0 0 7.50000E+00 0.00000E+00 0.00000E+00
5 0 0 0 1.00000E+01 0.00000E+00 0.00000E+00
6 0 0 0 0.00000E+00 1.75000E+00 0.00000E+00
7 0 0 0 2.50000E+00 1.75000E+00 O.000OOE+0O
8 0 0 0 5.00000E+00 1.75000E+00 0.00000E+00
9 0 0 0 7.50000E+00 1.75000E+00 0.00000E+00
10 0 0 0 1.00000E+01 1.75000E+00 0.00000E+00
110 0 0 O.OO000E+OO 3.50000E+00 0.0O0O0E+O0
12 0 0 0 2.50000E+00 3.50000E+00 0.0OOO0E+0O
13 0 0 0 5.00000E+00 3.50000E+00 0.00000E+00
14 0 0 0 7.50000E+00 3.50000E+00 0.00000E^00
15 0 0 0 1.00000E+01 3.50000E+00 O.OOOOOE+00
16 0 0 0 0.00000E^00 5.25000E+00 0.00000E+00
17 0 0 0 2.50000E+00 5.25000E+00 0.00000E+00
13 0 0 0 5.00000E+00 5.25000E+00 0.00000E+00
19 0 0 0 7.50000E+00 5.25000E+00 0.00000E+00
20 0 0 0 1.00000E+01 5.25000E+00 O.OOOOOE+00
21 0 0 0 O.0O00OE+OO 7.00000E+00 0.00000E+00
22 0 0 0 2.50000E+00 7.00000E+00 0.00000E+00
23 0 0 0 5.00000E+00 7.00000E+00 0.0O0OOE+0O
24 0 0 0 7.50000E+00 7.00000E+00 0.00000E+00
25 0 0 0 1.00000E+01 7.00000E+00 O.OOOOOE+00
-1
6- 1

82
1 59
NONE
1 2 4 5 0 6 7
3 9 10 0 11 12 13 14
15 0 16 17 13 19 20 0
21 22 23 24 25 0 1 6
11 16 21 0 22 17 12 7
2 0^
j 8 13 18 23 0
24 19 14 9 4 0 5 10
15 20 25
-1
-1
55
NONE
NONE
NONE
NONE
NONE
1 2 2 8 2 3
2 4 0 1
1.32460E+03 1.00000E+00 9.91757E-05 O.OOOOOE+00
1
0.00000E+00 0.00000E+00 -5.86824E-01
2
O.OOOOOE+00 0.00000E+00 -3.46579E-01
0.00000E+00 O.OOOOOE+00 2.02470E-03
4
0.00000E-00 0.00000E+0O 3.68593E-01
5
0.00000E+00 0.00000E+00 5.83806E-01
6
0.0OO00E+0O 0.00000E+00 -3.05378E-01
7
0.00000E+00 0.00000E+00 -1.84973E-01
8
0.00000E+00 0.00000E+00 1.96946E-04
9
0.00000E+00 0.00000E+00 1.81084E-01
10
6-2

O.OOOOOE+00 O.OOOOOE+OO 3.14426E-01
11
O.OOOOOE+OO O.OOOOOE+OO -5.44979E-03
12
O.OOOOOE+OO O.OOOOOE+OO 5.91169E-03
13
O.OOOOOE+OO O.OOOOOE+OO 1.043 14E-03
14
O.OOOOOE+OO O.OOOOOE+OO -5.3593 1E-03
15
O.OOOOOE+OO O.OOOOOE+OO -7. 10461 E-03
16
O.OOOOOE+OO O.OOOOOE+00 3.48528E-01
17
O.OOOOOE+00 O.OOOOOE+OO 2.05564E-01
18
O.OOOOOE+OO O.OOOOOE+OO -2.97282E-02
19
O.OOOOOE+OO O.OOOOOE+OO -2.02715E-01
20
O.OOOOOE+OO O.OOOOOE+00 -3.52504E-01
21
O.OOOOOE+OO O.OOOOOE+OO 5.84727E-01
22
O.OOOOOE+00 O.OOOOOE+00 3.57655E-01
23
O.OOOOOE+OO O.OOOOOE+OO 4.79084E-03
24
O.OOOOOE+OO O.OOOOOE+OO -3.62484E-01
25
O.OOOOOE+OO O.OOOOOE+OO -5.29462E-01
-1
-1
55
NONE
NONE
NONE
NONE
NONE
12 2 8 2 3
2 4 0 2
1.56480E+03 l.OOOOOE+OO 1.32508E-04 O.OOOOOE+OO
6-3

1
O.OOOOOE+00 O.OOOOOE+OO -3.48492E-01
2
O.OOOOOE+OO O.OOOOOE+OO 1.20300E-01
O.OOOOOE+OO O.OOOOOE+OO 2.98750E-01
4
O.OOOOOE+OO O.OOOOOE+OO 8.61571E-02
5
O.OOOOOE+OO O.OOOOOE+OO -3.55272E-01
6
O.OOOOOE+OO O.OOOOOE+OO -3.74464E-01
7
O.OOOOOE+OO O.OOOOOE+OO 2.77836E-02
8
O.OOOOOE+OO O.OOOOOE+OO 2.21947E-01
9
O.OOOOOE+OO O.OOOOOE+OO 5.12652E-03
10
O.OOOOOE+OO O.OOOOOE+OO -4.00066E-01
11
O.OOOOOE+OO O.OOOOOE+OO -3.S6589E-01
12
O.OOOOOE+OO O.OOOOOE+OO 8.93360E-03
13
O.OOOOOE+00 O.OOOOOE+OO 1.95416E-01
14
O.OOOOOE+00 O.OOOOOE+00 -3.44922E-03
15
O.OOOOOE+OO O.OOOOOE+OO -3.34464E-01
16
O.OOOOOE+00 O.OOOOOE+00 -3.83170E-01
17
O.OOOOOE+OO O.OOOOOE+OO 2.58356E-02
18
O.OOOOOE+00 O.OOOOOE+00 1.23426E-01
19
O.OOOOOE+OO O.OOOOOE+OO -7.75909E-04
20
O.OOOOOE+OO O.OOOOOE+OO -4.14601E-01
21
O.OOOOOE+00 O.OOOOOE+OO -3.29705E-01
6-4

22
O.OOOOOE+00 O.OOOOOE+00 1.22044E-01
23
O.OOOOOE+OO O.OOOOOE+00 3.09102E-01
24
O.OOOOOE+OO O.OOOOOE+00 7.27050E-02
25
O.OOOOOE+OO
-1
O.OOOOOE+00 -3.21214E-01
-1
55
NONE
NONE
NONE
NONE
NONE
1 2 2 8 2 3
2 4 0 3
3.04423E+03 1.00000E+00 1.17579E-04 0.00000E+00
1
O.OOOOOE+00 O.OOOOOE+00 4.39691E-01
2
O.OOOOOE+00 O.OOOOOE+00 -5.63480E-02
j
O.OOOOOE+00 O.OOOOOE+00 -4.44899E-01
4
O.OOOOOE+00 O.OOOOOE+00 -4.13540E-02
5
O.OOOOOE+00 O.OOOOOE+00 5.04277E-01
6
O.OOOOOE+00 O.OOOOOE+00 3.02237E-01
7
O.OOOOOE+OO O.OOOOOE+00 -2.09662E-02
8
O.OOOOOE+00 0.00000E+00 -2.03924E-01
9
0.00000E+00 O.OOOOOE+00 -1.59219E-02
10
0.00000E+00 O.OOOOOE+00 3.38451E-01
11
O.OOOOOE+00 O.OOOOOE+00 -6.51696E-04
12
6-5

O.OOOOOE+OO O.OOOOOE+OO 1.35272E-03
13
O.OOOOOE+OO O.OOOOOE+OO 2.66321E-03
14
O.OOOOOE+OO O.OOOOOE+OO 1.10455E-03
15
O.OOOOOE+OO O.OOOOOE+OO 1.46552E-02
16
O.OOOOOE+OO O.OOOOOE+OO -3.58727E-01
17
O.OOOOOE+OO O.OOOOOE+OO 2.28663E-02
13
O.OOOOOE+OO O.OOOOOE+OO 2.41296E-01
19
O.OOOOOE+OO O.OOOOOE+OO 1.72942E-02
20
O.OOOOOE+00 O.OOOOOE+00 -3.50449E-01
21
O.OOOOOE+00 O.OOOOOE+00 -4.9893 1E-01
22
O.OOOOOE+OO O.OOOOOE+00 4.83377E-03
23
O.OOOOOE+OO O.OOOOOE+00 4.13895E-01
24
O.OOOOOE+00 O.OOOOOE+00 -1.73278E-03
25
O.OOOOOE+OO
-1
O.OOOOOE+00 -4.72625E-01
-1
55
NONE
NONE
NONE
NONE
NONE
1 2 2 8 2 3
2 4 0 4
3.2^222E+03 l.OOOOOE+00 6.16049E-05 O.OOOOOE+OO
1
O.OOOOOE+00 O.OOOOOE+00 3.99422E-01
2
O.OOOOOE+OO O.OOOOOE+OO 3.62373E-01
6-6

J
O.OOOOOE+OO O.OOOOOE+OO 2.24629E-01
4
O.OOOOOE+OO O.OOOOOE+OO 3.47361E-01
5
O.OOOOOE+OO O.OOOOOE+OO 3.95510E-01
6
O.OOOOOE+OO O.OOOOOE+OO 3.99281 E-03
7
O.OOOOOE+OO O.OOOOOE+OO -3.32150E-02
8
O.OOOOOE+OO O.OOOOOE+OO -8.27709E-02
9
O.OOOOOE+OO O.OOOOOE+OO -4.23517E-02
10
O.OOOOOE+00 O.OOOOOE+OO 9.28258E-03
11
O.OOOOOE+OO O.OOOOOE+00 -2.0491 1E-01
12
O.OOOOOE+OO O.OOOOOE+00 -2.20993E-01
13
O.OOOOOE+OO O.OOOOOE+OO -2.54993E-01
14
O.OOOOOE+00 O.OOOOOE+OO -2.16962E-01
15
O.OOOOOE+OO O.OOOOOE+OO -2.29558E-01
16
O.OOOOOE+00 O.OOOOOE+OO 1.18743E-03
17
O.OOOOOE+OO O.OOOOOE+OO -2.8643 1 E-03
18
O.OOOOOE+00 O.OOOOOE+00 1.89413E-02
19
O.OOOOOE+OO O.OOOOOE+OO -1.70335E-02
20
O.OOOOOE+00 O.OOOOOE+OO -3.08413E-03
21
O.OOOOOE+OO O.OOOOOE+OO 3.26171E-01
22
O.OOOOOE+OO O.OOOOOE+00 3.21549E-01
23
O.OOOOOE+OO O.OOOOOE+00 2.30144E-01
6-7

24
O.OOOOOE+OO O.OOOOOE+OO 2.88410E-01
25
O.OOOOOE+OO O.OOOOOE+OO 3.34488E-01
-1
-1
55
NONE
NONE
NONE
NONE
NONE
12 2 8 2 3
2 4 0 5
3.83873E+03 1.00000E+00 7.60842E-04 0.00000E+00
1
O.OOOOOE+00 0.00000E+00 -3.589 16E-01
2
O.OOOOOE+00 O.OOOOOE+00 -6.56163E-01
0.00000E+00 0.00000E+00 1.60130E-02
4
0.00000E+00 0.00000E+00 6.06190E-01
5
O.OOOOOE+00 0.00000E+00 3.66902E-01
6
O.OOOOOE+00 O.OOOOOE+OO 3.3801 1E-01
7
0.00000E+00 O.OOOOOE+00 -1.39173E-01
8
O.OOOOOE+00 O.OOOOOE+00 1.083 15E-02
9
0.00000E+00 0.00000E+00 1.26037E-01
10
O.OOOOOE+00 0.00000E+00 -3.803 12E-01
11
0.00000E+00 0.00000E+00 7.19069E-01
12
0.00000E+00 0.00000E+00 8.67133E-02
13
O.OOOOOE+OO 0.00000E+00 6.12616E-03
14
6-8

O.OOOOOE+00 O.OOOOOE+00 -1.01669E-01
15
O.OOOOOE+00 O.OOOOOE+00 -7.75605E-01
16
O.OOOOOE+OO O.OOOOOE+OO 2.53629E-01
17
O.OOOOOE+OO O.OOOOOE+OO -1.71290E-01
18
O.OOOOOE+OO O.OOOOOE+OO 9.30046E-03
19
O.OOOOOE+OO O.OOOOOE+OO 1.35963E-01
20
O.OOOOOE+OO O.OOOOOE+00 -3.85966E-01
21
O.OOOOOE+OO O.OOOOOE+OO -3.99909E-01
22
O.OOOOOE+OO O.OOOOOE+00 -6.33305E-01
23
O.OOOOOE+00 O.OOOOOE+00 5.89773 E-02
24
O.OOOOOE+00 O.OOOOOE+00 5.11771E-01
25
O.OOOOOE+00 O.OOOOOE+00 2.43630E-01
-1
-1
55
NONE
NONE
NONE
NONE
NONE
12 2 8 2 3
2 4 0 6
4.50953E+03 1.00000E+00 9.05644E-05 O.OOOOOE+OO
1
O.OOOOOE+00 O.OOOOOE+00 3.78625E-01
2
O.OOOOOE+OO O.OOOOOE+00 1.46020E-02
j
O.OOOOOE+00 O.OOOOOE+00 8.93352E-03
4
O.OOOOOE+OO O.OOOOOE+00 9.36221 E-03
6-9

5
O.OOOOOE+OO O.OOOOOE+OO -4.12892E-01
6
O.OOOOOE+OO O.OOOOOE+OO 1.43267E-01
7
O.OOOOOE+OO O.OOOOOE+OO -1.39387E-01
8
O.OOOOOE+OO O.OOOOOE+OO 1.09044E-02
9
O.OOOOOE+OO O.OOOOOE+OO 1.39523E-01
10
O.OOOOOE+00 O.OOOOOE+00 -1.87445E-01
11
O.OOOOOE+OO O.OOOOOE+00 1.93636E-02
12
O.OOOOOE+00 O.OOOOOE+00 -1.99465E-01
13
O.OOOOOE+00 O.OOOOOE+00 1.97228E-03
14
O.OOOOOE+OO O.OOOOOE+00 1.97755E-01
15
O.OOOOOE+OO O.OOOOOE+00 -3.32273E-02
16
O.OOOOOE+OO O.OOOOOE+OO 1.60499E-01
17
O.OOOOOE+00 O.OOOOOE+00 -1.1069SE-01
13
O.OOOOOE+00 O.OOOOOE+00 2.77330E-03
19
O.OOOOOE+OO O.OOOOOE+00 9.35762E-02
20
O.OOOOOE+OO O.OOOOOE+00 -1.30620E-01
21
O.OOOOOE+OO O.OOOOOE+00 2.75402E-01
22
O.OOOOOE+OO O.OOOOOE+00 -2.11807E-02
23
O.OOOOOE+OO O.OOOOOE+OO 5.7891 1E-03
24
O.OOOOOE+OO O.OOOOOE+OO 8.81941E-03
25
O.OOOOOE+00 O.OOOOOE+00 -3.65865E-01
6-10

-1
-1
55
NONE
NONE
NONE
NONE
NONE
12 2 8 2 3
2 4 0 7
5.58629E+03 1.00000E+00 1.92386E-04 0.00000E+00
1
O.OOOOOE+00 0.00000E+00 3.04819E-01
2
0.00000E+00 0.00000E+00 -2.73216E-01
j
0.00000E+00 0.00000E+00 7.81505E-04
4
0.00000E+00 0.00000E+00 1.70994E-01
5
0.00000E+00 0.00000E+00 -2.072 17E-01
6
0.00000E+00 0.00000E+00 1.51199E-01
7
0.00000E+00 0.00000E+00 -8.40705E-02
8
0.00000E+00 O.OOOOOE+00 1.08757E-02
9
O.OOOOOE+OO O.OOOOOE+00 8.02884E-02
10
0.00000E+00 0.00000E+00 -1.71014E-01
11
0.00000E+00 0.00000E+00 -5.20436E-03
12
0.00000E+00 O.OOOOOE+00 7.508 12E-04
13
O.OOOOOE+00 O.OOOOOE+00 1.97229E-03
14
O.OOOOOE+OO O.OOOOOE+00 -1.61120E-03
15
O.OOOOOE+OO O.OOOOOE+00 -1.3871 1E-02
16
6-11

O.OOOOOE+OO 0.00000E+00 -1.60936E-01
17
O.OOOOOE+OO O.OOOOOE+OO 3.34249E-02
18
O.OOOOOE+OO O.OOOOOE+00 5.55708E-03
19
O.OOOOOE+OO O.OOOOOE+00 -9.58472E-02
20
O.OOOOOE+00 O.OOOOOE+00 -2.171 18E-01
21
O.OOOOOE+00 O.OOOOOE+00 2.55173E-01
22
O.OOOOOE+00 O.OOOOOE+00 -2.71999E-01
23
O.OOOOOE+00 O.OOOOOE+00 5.19637E-02
24
O.OOOOOE+OO 0.00000E+00 -3.53292E-01
25
O.OOOOOE+00
-1
O.OOOOOE+00 2.02472E-01
-1
55
NONE
NONE
NONE
NONE
NONE
1 2 2 8 2 3
2 4 0 8
6.11457E+03 1.00000E+00 1.29205E-04 O.OOOOOE+00
1
O.OOOOOE+00 0.00000E+00 2.89501E-01
2
0.00000E+00 O.OOOOOE+OO -9.38323E-03
3
O.OOOOOE+00 O.OOOOOE+00 -2.50698E-01
4
0.00000E+00 0.00000E+00 -4.2293 1E-03
5
O.OOOOOE+00 O.OOOOOE+OO 2.44938E-01
6
0.00000E+00 O.OOOOOE+00 -5.51519E-02
6-12

7
O.OOOOOE+OO O.OOOOOE+OO -6.95130E-03
8
O.OOOOOE+OO O.OOOOOE+OO 2.02144E-02
9
O.OOOOOE+OO O.OOOOOE+OO -1.38022E-02
10
O.OOOOOE+00 O.OOOOOE+00 -2.84284E-02
11
O.OOOOOE+00 O.OOOOOE+00 -1.75806E-01
12
O.OOOOOE+00 O.OOOOOE+00 2.83299E-02
13
O.OOOOOE+00 O.OOOOOE+00 1.40684E-01
14
O.OOOOOE+00 O.OOOOOE+00 2.10513E-02
15
O.OOOOOE+OO O.OOOOOE+OO -2.15487E-01
16
O.OOOOOE+00 O.OOOOOE+00 1.23592E-03
17
O.OOOOOE+00 O.OOOOOE+OO -3.89617E-03
18
O.OOOOOE+00 O.OOOOOE+00 -4.45073E-03
19
O.OOOOOE+OO O.OOOOOE+OO -1.33503E-02
20
O.OOOOOE+OO O.OOOOOE+00 -4.37555E-02
21
O.OOOOOE+OO O.OOOOOE+OO 2.19407E-01
22
O.OOOOOE+OO O.OOOOOE+00 -2.40992E-02
23
O.OOOOOE+00 O.OOOOOE+OO -1.81198E-01
24
O.OOOOOE+OO O.OOOOOE+00 -3.5293 1E-03
25
O.OOOOOE+OO O.OOOOOE+OO 2.53617E-01
-1
6-L

N
,-i
~
o-o
CO
Cu CM
c_ n m n
< .+ i
11 < cu Ci)
eg cm
a * en crv
fc] .
Ci4 -^ i t < ( CJN
>
u_j < C Ci
u = 0) c
<u 0) 2 f
ri 0 0J a0 *vj T3 <U
U ^ O 'i co
a. r- s i Q
6-14

M
a;
c^: NO r->z-
-O <> i
< UM ^H CO uT)
C- NO CN
a. CM m .
r.| . f>
CNJ
'
< c ~i
u =S aj c
a aj ^ ^
T-l 'j 0)c* /^
0 r3 "O V =
u U o u TI
CL r- s *JU a
6- 15

OJ
C=2 t n
> o m I
< 4- CO
rn i) NO
Cu .. T c
!~S
m o
CJ . . t
m
>
1 1
iJ < mC7>
u ^ (U c0) CO
~
n u COr /->
O to TJ 0) c
u u O u .-o
a. s- x v*4 a
6-16

N
n w
1)
t: ^r
c_ CM rn m
< . i
_J rn 0) i)CL, <=r NO
cs *r CM i
cj . .
.u^-
m
>
NO
j_i < c^
i
u s: CO +,
CO CO 3 1
1
1 CJ COc* ^
0 (0 u CO e
u S-l O i-l .-o
p. 8- 2 Cu Q
6-17

rn ZZ a*
Cu
01
en
-2 m
cu
Cu
m
i
-r CO
CO CD
IT) CO
= 1/10-)
VO
U*-> < C D0 = (1) C01 CO 3 i
no 01 C C0 to 73 co Ei- 1-4 o 1-1 to
H r 2 t Q
6- 18

m OT3
-~
0
ki ie_
.n n m
< i
~^ *r 01 0)
C- .. , . NOr* NO m o
Cu . .
LU NO
>
CN
'
< Ct OU =: 0) c01 01 r. .-4
rn 'J 01 cr o.0 ^ W 0) eU u C S-l .-o
It-XlKQ
6- 19

N
m*
3*0
01
Cu C* m5-
-n m i
< ~r 01-J '-n 0) ^r
a. C7i CM
ex r- 07. .
Cu . CJV.-*4 .
r--n i i
>
c.;" < C>
u =: ai c<v o 3 --I
rn 0 CO C Q.0 <0 0) c
l-i i-i 0 U <0
S-f-Z^G
6-20

m <*>
0)
Cd -h m= > on i
< -^ CO-3 cj CM
C- r-l CN
c: co -4 .
Cd CM
Cu = CO VO I
-J < COCJ = 01 3
DO 3 t
m U 01c*
a.0 <0 73 0) SU U O Li to
ir-Z^2
6-21

APPENDIX 7
SYSTUNE Data File andMode Shape Plots for Plate Model

{
{ Plate model to simulate a free-free condition
{SET ECHO OFF
SET TITLE TUNING OF A PLATEMODEL'
{
{ Definition of geometry and properties
{SET TITLE
'
PLATEMODEL'
DEFINE
FEM
{
{ Dimension 2 indicates the dimensions of the model here XY
{DIMENSION 2
{
{ DOF 2 is for the defined DOF in SYSTUNE Uz,Rx,Ry
{DOF 2
{
( Node defines the node # and the grid location
{NODE 1 0.00 0.00 0.00
NODE 2 2.50 0.00 0.00
NODE 3 5.00 0.00 0.00
NODE 4 7.50 0.00 0.00
NODE 5 10.0 0.00 0.00
NODE 6 0.00 1.75 0.00
NODE 7 2.50 1.75 0.00
NODES 5.00 1.75 0.00
NODE 9 7.50 1.75 0.00
NODE 10 10.0 1.75 0.00
NODE 11 0.00 3.50 0.00
NODE 12 2.50 3.50 0.00
NODE 13 5.00 3.50 0.00
NODE 14 7.50 3.50 0.00
NODE 15 10.0 3.50 0.00
NODE 16 0.00 5.25 0.00
NODE 17 2.50 5.25 0.00
NODE 18 5.00 5.25 0.00
NODE 19 7.50 5.25 0.00
NODE 20 10.0 5.25 0.00
NODE 21 0.00 7.00 0.00
7-1

***
NODE 22 2.50 7.00 0.00
NODE 23 5.00 7.00 0.00
NODE 24 7.50 7.00 0.00
NODE 25 10.0 7.00 0.00
{
{ Element, #, Type, Def, Material, #, Geometrv, #, Connectivity,
{E 1 T QUAD4 M 1 G 1 C 1 2 7 6
E 1 T QUAD4 M 1 G I C 2 3 8 7
E 1 T QUAD4 M 1 G 1 C 3 5 9 8
E 1 T QUAD4 M 1 G 1 C 4 6 10 9
E IT QUAD4 M1G1C 6 7 12 11
E 1 T QUAD4 M 1 G 1 C 7 8 13 12
E 1 T QUAD4 M 1 G 1 C 8 9 14 13
E 1 T QUAD4 M 1 G 1 C 9 10 15 14
E 1 T QUAD4 M 1 G 1 C 11 12 17 16
E 1 T QUAD4 M 1 G 1 C 12 13 18 17
E 1 T QUAD4 M 1 G 1 C 13 14 19 18
E 1 T QUAD4 M 1 G 1 C 14 15 20 19
E 1 T QUAD4 M 1 G 1 C 16 17 22 21
E 1 T QUAD4 M 1 G 1 C 17 18 23 22
E 1 T QUAD4 M 1 G 1 C 18 19 24 23
E 1 T QUAD4 M 1 G 1 C 19 20 25 24
RETURN
{
{ MATERIAL, #, TYPE, #, RHO, E, NUr
MATERIAL 1 TYPE 1 0.00259, 1E+7, .33 RETURN
{
{ Geometry defines the elemental properties: Area, Moment of Inertia, Thickness etc.
{GEOMETRY 1 TYPE 5 0 0 .75 RETURN
{
{ No Boundary condition defined as the case being analyzed is a Free-Free Plate refer to
{ the Dvnamic card where the AUTOSPC is used to contain the model
{EXTRACT NODES
EXTRACT ELEMENTS
EXTRACTMATERIALS
EXTRACT GEOMETRIES
{
{ Defining the experimental data here using the frequencies onlyr
7-2

SET TITLE 'REFERENCEDATA'
DEFINE
EMA
FREQUENCY 1.3e3 1.4e3 2.6e3 2.88e3 RETURN
RETURN
RETURN
{
{ Computing MASS and STIFFNESS matrices
{COMPUTE STIFFNESS MASS RETURN
{
{
{DYNAMIC AUTOSPC FREE NORMMASS SHIFT (1st freq.) VECTOR 5
EXTRACT FREQUENCY
{
{ Select Parameters<
PARAMETER GLOBAL
LOWER -20 TYPE H UPPER 50 RETURN
RETURN
<
Response selects the response correlation, response selected is EMA Freq. Response
here means the value to which model is forced to relate. Extract command list the
properties requested
RESPONSE FREQ 1-5 RETURN
EXTRACT RESPONSE
Confidence command modifies the confidence value for the parameters selected the
extremes are 0 to 100. 0 eliminates effect of the parameter changes and 100 uses the
total change and its effect on the model. Variance specifies the percentage as expected
variance.
CONFIDENCE 10 VARIANCE PARAM ALL RETURN
Pairs the modes together. Sequential matches 1st FEM to 1st EXP, 2nd FEM to 2nd
EXP and so on.
PAIR MODE SEQUENTIAL RETURN
Sensitivity analysis
7-3

SENSI RETURN
EXTRACT SENSI
{ Tuning of the model
{TUNE ITERATION 10 EPS 1 1.0 NOPRTNT RETURN
{
{ Display results and store the run to a plate result file called PLATRES.SST
{EXTRACT RESULTS CORRELATION
OUTPUT FILE FORMAT FREE FILE PLATRES.SST
{
{
{SHOW TIME
STOP
7-4

7-5

mLU en
2: 1
><
2
in
C/)
> CO i*
co CNJT
CNs
25CD
3
<Q
LU
O
LU
rrLU
U_
LU
cr
LU
LTLU
0_
XLU
7-6

lOST
w en X
CO
<
co
> CD h~ LU CNCO CN LI CO
<I-
<Q
LU
ozLU
cr
LUu_
LU
cr
zLU
cr
LU
0_
XLU
CH
7-7

7-8

7-9

LUcSZ >J.
CN
?<co 2 o
> oo cbCO CN
t-
NT
X,
COCO
< gLU t^.
U_ <r
<1-
<Q
LU
ozLU
rrLUu_
LU
rr
LU
rr
LU
Q.
XLU
rr
7-10

7-11

7-12

APPENDLX 8
Test Case 2: Three Element Beam Model
Comparing Full and Partitioned EigenvectorModel Update Procedures
Detailed procedures --

Three Element Beam Model
A Y(t) , Y(t) , Y(t)
+ X
Figure 8.1
As illustrated in figure 8.1 the three element beam model has fixed-free boundary
conditions. We know the stiffness and mass matrices for the four node model, with 2
DOF for each node, will be of size 8x8. The stiffness and mass of each element are
6 3L -6 3L
2EI 3L 2f -3Z.
L~
L3-6 -3L 6 -3L
2L Lr -3L
2L-
and
[m]pAL
420
156 22L 54 -13L
'
22L4L2
- 131
54 - 131 156 - 22L
- 13Z, -31}- 22L
AL2
8-1

Where
E = Young's modulus, I= Moment of Inertia, L = Length of the element
A = Cross-Sectional area of the element, and p=Mass density
For the 3 element model under consideration the total system matrix is of the form
and
[K]=
[M]=
ml
k,
m.
m3
Where
M-
6 3L -6 3L 0 0 0 0
3L 21} -3L Lr 0 0 0 0
-6 -3L 12 0 -6 3L 0 0
2EI 2LL2
04L2
-3L
L2
0 0
L3 0 0 -6 -2L 12 0 -6 3L
0 0 31L2
04Z2
-31
L2
0 0 0 0 -6 -3L 6 3j
0 0 0 0 3LL2
-3L 21}
8-2

and
M-
156 22 L 54 - \3L 0 0 0 0
22L4L2
13L 0 0 0 0
54 131 312 0 54 - 13Z, 0 0
pAL- 13Z, 0
8i2
13 -3? 0 0
420 0 0 54 131 312 0 54 - 131
0 0 - 13Z, 0SL2
13L
0 0 0 0 54 13L 156 -221
0 0 0 0 - 131 -22L
4L2
With the system matrices generated, they can now be assigned to the
characteristic equation. Thereby we get
[\K]-
X,M] M- {F}
For free vibration the force vector {F} = {0] . Solving for eigenvalues and eigenvectors
we get
[M]~
[[K] - X,
The system matrix (8 x 8) for the 3 element beam model can be simplified subject
to the boundary conditions. As the first node is fixed rigidly, the first two rows and
8-

columns of the system matrix have no bearing on the solution. Therefore they can be
neglected thus reducing the matrix to a 6 x 6.
Further steps of the solution were processed in NASTRAN to get the eigenvalues
and eigenvectors. The variation in [ K ] and [ M ] subject to the variation in parameter (h)
were computed in a spreadsheet (Excel 5.0 ofMicrosoft). Refer to the following sheets
for calculation details.
8-4

Model update ofa 3 element beam model: Approach I
The solution for a beam model with L = 6.0", B =1.0"
and H =0.25"
.This model is
defined as the experimental model to which an analytical model would has to be tuned,
subject to the sensitivity analysis. The eigenvalues and the eigenvectors for the
experimental model from BM3D.F06 are:
Real Eigenvalues
Mode Eigenvalues Cycles
1 2.01E+06 2.26E+02
2 7.95E+07 1.42E+03"^
j 6.35E+08 4.01E+03
Cvcles =2.1'5735E+02 Real Eigenvector No. 1
Node Tl T2 T3 Rl R2 R3
1 0 0 0 0 0 0
2 0 9.93E+00 0 0 0 9.05E+00
0 3.28E+01 0 0 0 1.31E+01
4 0 6.00E+01 0 0 0 1.38E-01
Cvcles =1.41916E+03 Real Eigenvector No. 2
Node Tl T2 T3 Rl R2 R3
1 0 0 0 0 0 0
2 0 -3.56E+01 0 I 0 0 -1.77E-01
0 -2.56E+01 0 0 0 2.98E+01
4 0 6.04E+01 0 0 0 4.81E+01
Cvcles =4.010035E+03 Real Eigenvector No. 3
Node Tl T2 T3 Rl R2 R3
1 0 0 1 0 0 0 0
2 | 0 4.49E+01 0 0 0 -1.67E+0I
3 1 0 -3.95E+01 | 0 0 0 -1.27E+01
4 0 1 6.03E+01 0 0|0 7.99E^01
8-5

Similarly, the solution for a beam model with L =
6.0", B =1.0"
and H = 0. 125".
This model is assume d to the analytical model that has to be fine tuned to reflect the
modal response of the previous model. The eigenvalues and eigenvectors for the
analytical model from BM2D.F06 are
Real Eigenvalues
Mode Eigenvalues Cvcles
1 5.03E+05 1.13E+02
2 1.99E+07 7.10E+02^
j 1.59E+08 2.01E+03
Cvcles =1. 28850E+02 Real Eigenvector No. 1
Node Tl T2 T3 Rl R2 R3
1 0 0 0 0 0 0
2 0 1.40E+01 0 0 0 1.28E+01^
j 0 4.64E+01 0 0 0 1.85E+01
4 0 8.49E+01 0 0 0 1.95E+01
Cycles = 7.096895E+02 Real Eigenvector No. 2
Node Tl T2 T3 Rl | R2 R3
1 0 0 | 0 0 0 0
2 0 -5.04E+01 0 0 0 -2.51E-01
3 0 -3.61E+01 0 0 0 4.21E+01
4 0 8.54E+0I 0 0 0 6.81E+01
Cvcles =2.005326E+03 Real Eigenvector No. 3
Node Tl T2 T3 Rl R2 R3
1 0 0 | 0 0 0 0
2 I 0 6.34E+01 [ o 0 | 0 -2.36E+01
3 0 | -5.59E^0l | 0 0 0 -1.80E+01
4 | 0 8.52E+01 0 0 | 0 I 1.13E+02
8-6

Consolidating the eigenvector ofboth solutions in matrix form we get
The analytical eigenvector set
[*.]
1.40E+01 -5.04E+01 6.34E+01
1.28E+01 -2.51E+01 -2.36E+01
4.64E+01 -3.61E+01 -5.59E+01
1.95E+01 4.21E+01 -1.90E+01
8.49E+01 8.54E+01 8.52E+01
1.95E+01 6.81E+01 1.13E+02
This implies that the transpose of [Oa] is
mJ
1.40E+01 1.28E+01 1 4.64E+0I 1.35E+01 8.49E+01 1.95E+01
-5.04E+01 -2.51E-r01 -3.61E+01 4.21E^01 8.54E+01 6.81E+01
6.34E-01 -2.36E+01 -5.59E+01 -1.80E+01 8.52E+01 1.13E+02
The experimental eigenvector set
[<t>c]
9.93E-00 -3.56E-01 4.49E-01
9.05E-00 -1.77E+01 -1.67E+01
3.28E+01 -2.56E+01 -3.95E+01
1.31E+01 2.98E+01 -1.27E+01
6.00E+01 6.04E-01 6.03E+01
1.38E+01 4.31E+01 7.99E+01
8-7

This implies that the transpose of [Os] is
[<t>JT
9.93E+00 9.05E+00 3.28E+01 1.31E+01 6.00E+01 1.38E+01
-3.56E+01 -I.77E+0I -2.56E+01 2.98E+0I 6.04E+01 4.81E+01
4.49E+01 -1.67E+01 -3.95E+01 -1.27E+01 6.03E+01 7.99E+01
Computing the difference of eigenvector and assigning to {dO,}. This implies that
{*!} {*?} {<*>i}
9.93E+00 1.40E+01 -4.11E+00
9.05E+00 1.28E+01 -3.75E+00
3.28E+01 4.64E+01 -1.36E+01
1.31E+01 1.85E+01 -5.42E+00
6.00E+01 8.49E+01 -2.49E+01
1.38E+01 1.95E+01 -5.70E+00
{**} {*?} }c/02}
-3.56E+01 -5.04E+01 1.47E+01
-1.77E+01 -2.51E+01 7.35E+00
-2.56E+01 -3.61E+01 1.06E+01
2.98E+01 4.21E+01 -1.23E+01
6.04E+01 8.54E^01 -2.50E^01
4.81E+01 6.81E+01 -1.99E+01
1*5} K) {do3}
4.49E+01 6.34E+01 -1.86E+01
-1.67E+01 -2.36E+01 6.92E+00
-3.95E+01 -5.59E+01 1.64E+01
-1.27E+01 -1.80E+01 5.28E+00
6.03E+01 8.52E+01 -2.50E-01
7.99E-01 1.13E+02 -3.31E+01
8-8

This implies that [d<X>] is
{c/O,} {d<X>2} {jo3}-4.114149 14.74789 -18.57759
-3.746677 7.34877 6.91609
-13.59339 10.58724 16.3815
-5.42194 -12.33194 5.27913
-24.85352 -25.00194 -24.96821
-5.70184 -19.93893 -33.07771
Therefore the transpose of [d<>] is
[dO]T
-4.114149 -3.746677 -13.59339 -5.42194 -24.8535 -5.70184
14.74789 7.34877 10.58724 -12.3319 -25.0019 -19.9389
-18.57759 6.91609 16.3815 5.27913 -24.9682 -33.0777
Consolidating eigenvalue data we get
Eigenvalue data
Experimental Analytical Difference
X^-X^
Ratio
2.01E+06 5.03E+05 1.51E+06 3.997708
7.95E-07 1.99E+07 5.96E-07 3.997714
6.35E-08 1.59E+08 4.76E-08 | 3.997717
The stiffness matrix is
[K]=
14648.438 0.000 1-7324.219 7324.219 | 0.000 0.000
0.000 19531.250 -7324.219 4882.813 | 0.000 0.000
-7324.219 -7324.219 14648.4381 0.000 -7324.219 7324.219
7324.219 4882.813 0.000 119531.250 -7324.219 4882.813
0.000 0.000 -7324.219 -7324.219! 7324.219 -7324.219
0.000 0.000 7324.219 4882.813 1-7324.219 9765.625
8-9

The mass matrix is
[M]=
1.376E-04 O.OOOE+OO 2.382E-05 -1.147E-05 0.000E+00 O.OOOE+00
O.OOOE+OO 1.411E-05 1.147E-05 -5.293E-06 O.OOOE+00 O.OOOE+OO
2.382E-05 1.147E-05 1.376E-04 O.OOOE+00 2.382E-05 -1.147E-05
-1.147E-05 -5.293E-06 0.000E+00 1.411E-05 1.147E-05 -5.293E-06
O.OOOE+OO O.OOOE+00 2.382E-05 1.147E-05 6.881E-05 -1.941E-05
O.OOOE+00 O.OOOE+00 -1.147E-05 -5.293E-06 -1.941E-05 7.057E-06
The change in stiffhess[AK] of the beam for a change in height is
[AK]=
for5h=l%
443.862 0.000 -221.931 221.931 0.000 0.000
0.000 591.816 -221.931 147.954 0.000 0.000
-221.931 -221.931 443.862 0.000 -221.931 221.931
221.931 147.954 0.000 591.816 -221.931 147.954
0.000 0.000 -221.931 -221.931 221.931 -221.931
0.000 0.000 221.931 147.954 -221.931 295.908
The change in mass [AM] of the beam for a change in height is
[AM]=
forSh=l%
1.376E-06 O.OOOE+00 2.382E-07 -1.147E-07 O.OOOE+00 O.OOOE+00
0.000E-00 1.411E-07 1.147E-07 -5.293E-08 O.OOOE+00 O.OOOE+00
2.382E-07 1.147E-07 1.376E-06 0.000E+00 2.382E-07 -1.147E-07
-1.147E-07 -5.293E-08 O.OOOE+00 1.411E-07 1.147E-07 -5.293E-08
O.OOOE+OO O.OOOE+00 2.382E-07 1.147E-07 6.881E-07 -1.941E-07
O.OOOE+00 0.000E+00 -1.147E-07 -5.293E-08 -1.941E-07 7.057E-08
With the available data the parameters to update the model can now be computed. Refer
to eqn (6-88), where
dXi-
{d$>}T[K -
X, M]{d<S>} =^}T
[fdK] - X, [dM]]\^e{ }
8-10

Performing the computation of LHS of the equation we get
[XM] =
69.230183 0.000 11.982147 -5.769182 0.000 0.000
0.000 7.1005316 5.7691819 -2.662699 0.000 0.000
11.982147 5.7691819 69.230183 0.000 11.982147 -5.769182
-5.769182 -2.662699 0.000 7.1005316 5.7691819 -2.662699
0.000 0.000 11.982147 5.7691819 34.615091 -9.763231
0.000 0.000 -5.769182 -2.662699 -9.763231 3.5502658
[K-XJXM] =
14579.208 0.000 -7336.201 7329.988 0.000 0.000
0.000 19524.149 -7329.988 4885.475 0.000 0.000
-7336.201 -7329.988 14579.208 0.000 -7336.201 7329.988
7329.988 4885.475 0.000 19524.149 -7329.988 4885.475
0.000 0.000 -7336.201 -7329.988 7289.604 -7314.456
0.000 0.000 7329.988 4885.475 | -7314.456 9762.075
This implies that [X -
X\M]{d0x }
0.053940
-0.050506
0.4671565
0.0767026
0.1394169
0.0402738
Therefore we get {dx}T
[K -
X
M]{d<$>x }
-10.49344
8-11

Similarly we get
[X\M] =
2736.277 0.000 473.586 -228.023 0.000 0.000
0.000 280.644 228.023 -105.241 0.000 0.000
473.586 228.023 2736.277 0.000 473.586 -228.023
-228.023 -105.241 0.000 280.644 228.023 -105.241
0.000 0.000 473.586 228.023 1368.139 -385.885
0.000 0.000 -228.023 -105.241 -385.885 140.322
[K-X\M] =
11912.160 0.000 -1191. SOS 7552.242 0.000 0.000
0.000 19250.606 -7552.242 4988.054 0.000 0.000
-1191MS -7552.242 11912.160 0.000 -1191.SOS 7552.242
7552.242 4988.054 0.000 19250.606 -7552.242 4988.054
0.000 0.000 -7797.805 -7552.242 5956.080 -6938.334
0.000 0.000 7552.242 4988.054 -6938.334 9625.303
This implies that [K - X%M]{dOz }
11.79586
-1.50126
-7.32390
2.61151
5.94448
-1.43108
Therefore we get {d<&2 }T[K -
Xa2 M]{d<$2 }
-414.8304
8-12

Similarly,
[\*3Mj =
21847.066 0.000 3781.223 -1820.589 0.000 0.000
0.000 2240.725 1820.589 -840.272 0.000 0.000
3781.223 1820.589 21847.066 0.000 3781.223 -1820.589
-1820.589 -840.272 0.000 2240.725 1820.589 -840.272
0.000 0.000 3781.223 1820.589 10923.533 -3080.996
0.000 0.000 -1820.589 -840.272 -3080.996 1120.362
[K-XaiM] =
-7198.629 0.000 -11105.440 9144.808 0.000 0.000
0.000 17290.525 -9144.808 5723.084 0.000 0.000
-11105.440 -9144.808 -7198.629 0.000 -11105.440 9144.808
9144.808 5723.084 0.000 17290.525 -9144.808 5723.084
0.000 0.000 -11105.440 -9144.808 -3599.314 -4243.222
0.000 0.000 9144.808 5723.084 4243.222 8645.263
This implies that [K -
Xa3M]{d3 }
86.003819
-9.930608
-64.59486
-5.234929
24.088161
-1.254699
Therefore we get {d<X> .
}r
[K -
X] M]{d<S>3 }
-3312.157
8-i:

Performing the calculations of the RHS of eqn. (6-88)
dXf- {d}
T
[K -
XtM]{d} = {aV }r
\[dK] - Xx [dMf^l }
Xax [dM] =
0.6923 0.0000 0.1198 -0.0577 0.0000 0.0000
0.0000 0.0710 0.0577 -0.0266 0.0000 0.0000
0.1198 0.0577 0.6923 0.0000 0.1198 -0.0577
-0.0577 -0.0266 0.0000 0.0710 0.0577 -0.0266
0.0000 0.0000 0.1198 0.0577 0.3462 -0.0976
0.0000 0.0000 -0.0577 -0.0266 -0.0976 0.0355
[dK]-X\[dM] =
443.170 0.000 -222.051 221.989 0.000 0.000
0.000 591.745 -221.989 147.981 0.000 0.000
-222.051 -221.989 443.170 0.000 -222.051 221.989
221.989 147.981 0.000 591.745 -221.989 147.981
0.000 0.000 -222.051 -221.989 221.585 -221.834
0.000 0.000 221.989 147.981 -221.834 295.872
This implies that \[dK] -Xax[dM]^}\Ys
20.40054
4.43719
62.56093
6.51430
48.93334
.15.44446
Therefore {[brfUdK]-
Xax [dM]]{<$>(] is
5104.6005
8-14

X"2[dMJ =
27.3628 0.0000 4.7359 -2.2802 0.0000 0.0000
0.0000 2.8064 2.2802 -1.0524 0.0000 0.0000
4.7359 2.2802 27.3623 0.0000 4.7359 -2.2802
-2.2802 -1.0524 0.0000 2.8064 2.2802 -1.0524
0.0000 0.0000 4.7359 2.2802 13.6814 -3.8589
0.0000 0.0000 -2.2802 -1.0524 -3.8589 1.4032
[dK]-X\[dM] =
416.500 0.000 -226.667 224.211 0.000 0.000
0.000 589.010 -224.211 149.007 0.000 0.000
-226.667 -224.211 416.500 0.000 -226.667 224.211
224.211 149.007 0.000 589.010 -224.211 149.007
0.000 0.000 -226.667 -224.211 208.250 -218.072
0.000 0.000 224.211 149.007 -218.072 294.505
This implies that \[dK] - X\ /W7]{d><
} is
-2360.504
-282.9069
1486.238
548.70867
1191.0226
-280.9128
Therefore {2}T[[dKJ -Xa2[dMj}{2}is
201755.93
8-15

Similarlv,
X*}[dMJ =
218.4707 0.0000 37.8122 -18.2059 0.0000 0.0000
0.0000 22.4072 18.2059 -8.4027 0.0000 0.0000
37.8122 18.2059 218.4707 0.0000 37.8122 -18.2059
-18.2059 -8.4027 0.0000 22.4072 18.2059 -9.4027
0.0000 0.0000 37.8122 18.2059 109.2353 -30.8100
0.0000 0.0000 -18.2059 -8.4027 -30.8100 11.2036
[dK]-XaJdM] =
225.392 0.000 -259.743 240.137 0.000 0.000
0.000 569.409 -240.137 156.357 0.000 0.000
-259.743 -240.137 225.392 0.000 -259.743 240.137
240.137 156.357 0.000 569.409 -240.137 156.357
0.000 0.000 -259.743 -240.137 112.696 -191.121
0.000 0.000 240.137 156.357 -191.121 284.705
This implies that \[dKJ- Xa3[dM]]k>'^ is
17320.794
-2003.090
13034.320
-1086.534
4363.820
-274.756
Therefore {o^}T
UdK J-
Xa3 [dM]]k>i } is
1610365.96
8-16

From the calculations performed we have
For i = I i= 2 ;
= 3
dX, =V-X* 1508603.9 59626580 476072400
{dO,}T[K-XlMj{dOl}-10.49344 -414.8304 -3312.157
dk, - {d,}T[K-
X, M]{d<X>t ]1508614.4 59626995 476075712
5r, ={of}r
'[dK]-X[dM]}{<}5104.6005 201755.93 1610865.96
We have computed 5Tl for a change Sh. The sensitivity (or derivative) is expressed by
5Ti / oh, therefore we have
Sensitivitv / = / i=2 i = 3
5r</ -
/5/i~
510460.05 20175593 161086596
Denote [ Sw ] such that
[Sw]-
510460.05
20175593
161086596
We know from equation (6-107) that the inverse of [ Sw ] is required to compute
the model update parameters. As [ Sw ] is a rectangular matrix, the inverse of [ Sw ] is
computed using the Moore-Penrose method. See section 3.4 for details.
8-17

This implies that
[Sw]'= 510460.05 20175593 161086596
This implies that [ Sw ]T[ Sw ]= 2.636E+16
Therefore [[ Sw f[ Sw]]"'
= 3.794E-17
We know that [ Sw]"'=
[ Sw1T
[[ Sw1T
[ Sw]]"'
for a rectangular matrix [ Sw ]
Therefore
Sw 1 1.937E-11 7.655E-10 6.112E-09
For this beam model we have
dX,- -{JO }T[K-X,M]{d<$,}
I 1508614.4
dTw- 59626995
1 476075712
This implies that [ Sw]''
[dTiy ]= 2.9554024
8-13

The moment of inertia of a beam is I =bh3
/ 12, this implies that for a change in
height"h"
the moment of inertia responds as
dl3bh2
dh 12
This implies that
Therefore
d] =3bh-(dh)
12
= ?f
A change in height (thickness) of a beam affects the moment of inertia of the
beam by a factor of "3", consequently influences the model's stiffness by factor of "3".
This has to be considered while updating model parameters. See section 6.3 (eqn. (6-68))
for details.
Designfbf1
) = Design(b](\ -
a (dbj)))
Therefore using a= 1/3
,we get
hnew
= h(l -- (2.9554024))
8-19

On simplifying further we get
h"""
=(1.985134) h
hnew
= 0.2481418
The calculated value ofh"ew
as obtained from the sensitivity analysis is in excellent
agreement with the experimental model's thickness of 0.25.
8-20

Model update ofa 3 element beam model: Approach II
The solution for a beam model with L =
6.0", B=
1.0"
and H =0.25"
.This model is
defined as the experimental model to which an analytical model would has to be tuned,
subject to the sensitivity analysis. The eigenvalues and the eigenvectors for the
experimental model from BM3D.F06 are:
Real Eigenvalues
Mode Eigenvalues Cycles
1 2.01E+06 2.26E+02
2 7.95E+07 1.42E+03
6.35E+08 4.01E+03
Cycles =2.1'5735E+02 Real Eigenvector No. 1
Node Tl T2 T3 Rl R2 R3
1 0 0 0 0 0 0
2 0 9.93E-00 0 0 0 9.05E+00
0 3.28E+01 0 0 0 1.31E+01
4 0 6.00E+01 0 0 0 1.38E+01
Cvcles =1-H916E-03 Real Eigenvector No. 2
Node Tl T2 T3 Rl R2 R3
1 0 0 0 0 0 0
2 0 -3.56E-01 0 0 0 -1.77E+01
0 -2.56E+01 0 0 0 2.98E+01
4 0 6.04E+01 0 0 0 4.81E+01
CvcIes=4.010035E+03 Real Eigenvector No. 3
Node Tl T2 T3 Rl R2 R3
1 0 0 0 0 0 0
2 0 4.49E-01 0 0 o -1.67E+01
3 0 -3.95E-01 0 0 0 -1.27E+01
4 | 0 6.03E+01 0 0 0 7.99E+01
8-21

Similarly, the solution for a beam model with L =
6.0", B=
1.0"
and H = 0. 125".
This model is assume d to the analytical model that has to be fine tuned to reflect the
modal response of the previous model. The eigenvalues and eigenvectors for the
analytical model from BM2D.F06 are
Real Eigenvalues
Mode Eigenvalues Cycles
1 5.03E+05 1.13E+02
2 1.99E+07 7.10E+02
3 1.59E+08 2.01E+03
Cvcles =1. 28850E+02 Real Eigenvector No. 1
Node Tl T2 T3 Rl R2 R3
1 0 0 0 0 0 0
2 0 1.40E+01 0 0 0 1.28E+01^
j 0 4.64E+01 0 0 0 1.85E+01
4 0 8.49E+01 0 0 0 1.95E+0I
Cycles = 7.096895E+02 Real Eigenvector No. 2
Node Tl T2 T3 Rl R2 R3
1 0 0 0 0 0 0
2 0 -5.04E+01 0 0 0 -2.51E+01
->
j 0 -3.61E+01 0 0 0 4.21E+01
4 0 8.54E+01 0 0 0 6.81E+01
Cvcles =2.005326E+03 Real Eigenvector No. 3
Node Tl T2 T3 Rl R2 R3
1 0 0 0 0 0 0
2 0 6.34E+01 0 0 0 -2.36E+01
0 -5.59E+01 0 0 0 -1.80E+01
4 0 8.52E+01 0 0 0 1.13E+02
8-22

Consolidating the eigenvector of both solutions in matrix form we get
The analytical eigenvector set
fO 1
1.40E+01 -5.04E+01 6.34E+01
1.28E+01 -2.51E+0 1 -2.36E+01
4.64E+0I -3.61E+0 1 -5.59E+01
1.95E+01 4.21E+01 -1.90E+01
8.49E+01 8.54E+01 8.52E+01
1.95E+01 6.81E+01 1.13E+02
This implies that the transpose of [Oa] is
r*.iT
1.40E+01 1.23E+01 I4.64E+01 1.85E+01 8.49E+01 1.95E+01
-5.04E+01 -2.51E+01 -3.61E+01 4.21E+01 8.54E+01 6.81E+01
6.34E+01 -2.36E+01 -5.59E+0I -1.80E+01 8.52E+01 1.13E+2
The experimental eigenvector set
T<I>el
9,93E^00 -3.56E+01 4.49E+01
9.05E+00 -1.77E+01 -1.67E+01
3.28E+01 -2.56E+01 -3.95E+01
1.31E+01 2.98E+01 -1.27E+01
6.00E+01 6.04E+01 6.03E^01
1.38E+0 1 4.81E+01 7.99E+01
8-23

This implies that the transpose of [Oe] is
TOjT
9.93E+00 9.05E+00 3.28E+01 1.31E+01 6.00E+01 1.38E+01
-3.56E+01 -1.77E+01 -2.56E+01 2.98E+0I 6.04E+01 4.81E+01
4.49E+01 -1,67E+01 -3.95E+01 -1.27E+01 6.03E+01 7.99E+01
Computing the difference of eigenvector and assigning to {dO,}. This implies that
{<>,} =
{o;} - {o;}
{*!} {*?} [d<t>x]
9.93E+00 1.40E+01 -4.11E+00
9.05E+00 1.28E+01 -3.75E+00
3.28E+01 4.64E+01 -1.36E+01
1.31E+01 1.85E+01 -5.42E+00
6.00E+01'
8.49E+01 -2.49E+01
1.38E+01 1.95E+01 -5.70E+00
{*;} {*;} {jo2}
-3.56E+01 -5.04E+01 1.47E+01
-1.77E+01 -2.51E+01 7.35E+00
-2.56E+01 -3.61E+01 1.06E+01
2.98E+01 4.21E+01 -1.23E+01
6.04E+01 8.54E+01 -2.50E+01
4.81E+01 6.81E+01 -1.99E+01
N !*"} {J03}
4.49E+01 6.34E+01 -1.86E+01
-1.67E+01 -2.36E+01 6.92E+00
-3.95E+01 -5.59E+01 1.64E+01
-1.27E+01 -1.80E+01 5.28E+00
6.03E+01 8.52E+01 -2.50E+01
7.99E+01 1.13E+02 -3.31E+01
8-24

This implies that [dO] is
{c/O,} {*M {JO,}-4.114149 14.74789 -18.57759
-3.746677 7.34877 6.91609
-13.59339 10.58724 16.3815
-5.42194 -12.33194 5.27913
-24.85352 -25.00194 -24.96821
-5.70184 -19.93893 -33.07771
Therefore the transpose of [dO] is
[dO]r
-4.114149 -3.746677 -13.59339 -5.42194 -24.8535 -5.70184
14.74789 7.34877 10.58724 -12.3319 -25.0019 -19.9389
-18.57759 6.91609 16.3815 5.27913 -24.9682 -33.0777
Consolidating eigenvalue data we get
Eigenvalue data
Experimental Analytical Difference
K - K
Ratio
A.e / A..J
2.01E+06 5.03E+05 1.51E+06 3.997708
7.95E^07 1.99E+07 5.96E+07 3.997714
6.35E+08 1.59E+08 4.76E+08 3.997717
[K]=
14648.438 0.000 -7324.219 7324.219 0.000 0.000
0.000 19531.250 -7324.219 4882.813 0.000 0.000
-7324.219 -7324.219 14648.438 0.000 -7324.219 7324.219
7324.219 4882.813J 0.000 19531.250 -7324.219 4882.813
0.000 0.000 | -7324.219 -7324.219 7324.219 -7324.219
0.000 0.000 | 7324.219 4882.813 -7324.219 9765.625
8-25

[M]=
1.376E-04 O.OOOE+OO 2.382E-05 -1.147E-05 O.OOOE+OO O.OOOE+OO
O.OOOE+00 1.411E-05 1.147E-05 -5.293E-06 O.OOOE+OO O.OOOE+OO
2.382E-05 1.147E-05 1.376E-04 O.OOOE+OO 2.382E-05 -1.147E-05
-1.147E-05 -5.293E-06 O.OOOE+OO 1.411E-05 1.147E-05 -5.293E-06
O.OOOE+OO O.OOOE+OO 2.382E-05 1/147E-05 6.881E-05 -1.941E-05
O.OOOE+OO O.OOOE+OO -1.147E-05 -5.293E-06 -1.941E-05 7.057E-06
The change in stiffhess[AK] of the beam for a change in height is
[AK]=
forSh=l%
443.862 0.000 -221.931 221.931 0.000 0.000
0.000 591.816 -221.931 147.954 0.000 0.000
-221.931 -221.931 443.862 0.000 -221.931 221.931
221.931 147.954 0.000 591.816 -221.931 147.954
0.000 0.000 -221.931 -221.931 221.931 -221.931
0.000 0.000 221.931 147.954 -221.931 295.908
The change in mass [AM] of the beam for a change in height is
[AM]=
for5h=l%
1.376E-06 O.OOOE+00 2.382E-07 -1.147E-07 O.OOOE+00 O.OOOE+00
O.OOOE+OO 1.411E-07 1.147E-07 -5.293E-08 O.OOOE+00 O.OOOE+00
2.382E-07 1.147E-07 1.376E-06 0.000E+00 2.382E-07 -1.147E-07
-1.147E-07 -5.293E-08 O.OOOE+00 1.411E-07 1.147E-07 -5.293E-08
O.OOOE+00 0.000E+00 2.382E-07 1.147E-07 6.881E-07 -1.941E-07
O.OOOE+00 O.OOOE+00 -1.147E-07 -5.293E-08 -1.941E-07 7.057E-08
If we are considering the eigenvector displacements only in the Y DOF of the
experimental model, then the analytical model must be reduced to the experimental
model size to generate the model update parameters.
8-26

This implies that the experimental eigenvector set is
[Oel
9.93E+00 -3.56E+01 4.49E+01
3.28E+01 -2.56E+01 -3.95E+01
6.00E+01 6.04E+01 6.03E+01
The transpose of the experimental eigenvector is
[*.]T
9.93E+00 3.28E+01 6.00E+01
-3.56E+01 -2.56E+01 6.04E+01
4.49E+01 -3.95E+01 6.03E+01
We know that the analytical matrix can be partitioned into A-set and O-set such
that the A-set DOF correspond to experimental model DOF. A transformation matrix to
reduce the analytical matrices must be generated to obtain compatible size matrices. The
Mass and Stiffness matrices must be of reduced size for further calculations as will be
noted later.
The analytical eigenvector corresponding to the experimental DOF, known as A-set, is
[*J
1.40E+01 -5.04E+01 6.34E+01
4.64E+01 -3.61E+01 -5.59E+01
8.49E+01 8.54E+01 8.52E+01
8-27

The remaining part of the analytical eigenvector, known as O-set, is
[<*>o]
1.28E+01 -2.51E+01 -2.36E+01
1.85E+01 4.21E+01 -1.80E+01
1.95E+01 6.81E+01 1.13E+02
The transpose of the analytical eigenvector is
[Oa]T
1.40E+01 4.64E+01 8.49E+01
-5.04E+01 -3.61E+01 8.54E+01
6.34E+01 -5.59E+01 8.52E+01
Therefore we have [Oa]T[Oa]
[Oaf [*J
9551.6725 4958.5129 5528.8297
4858.5129 11128.642 6104.7885
5528.8297 6104.7885 14418.271
Computing the inverse of [Oa] [Oa] we have
[[^af[*J]-1
1.495E-04 -4.400E-05 -3.870E-05
-4.400E-05 1.300E-04 -3.820E-05
-3.870E-05 -3.001E+00 1.003E-04
We know from section 3.4 that[Oa]_1
=[[Oa]T[Oa]]"1 [Oa]T
8-28

This implies that
[<sayl
1.865E-03 1.069E-02 5.628E-03
-9.586E-03 -4.610E-03 4.108E-03
7.743E-03 -6.027E-03 2.015E-03
Ifwe define [ Dm ] such that [Dm ]=
[ 00 ] [OJ
[o0][oarl
8.154E-02 3.948E-01 -7.866E-02
-5.087E-01 1.125E-01 2.408E-01
2.582E-01 -7.864E-01 6.168E-01
The transformation matrix is computed by augumenting [ Dm ] with an identity matrix
[Tm]
1 0 0
8.154E-02 3.948E-01 -7.866E-02
0 1 0
-5.087E-01 1.125E-01 2.408E-01
0 0 1
2.582E-01 -7.864E-01 6.168E-01
The transpose of the transformation matrix is
[Tmr
i 8.154E-02 0 -5.087E-01 0 2.582E-01
0 3.948E-01 1 | 1.125E-01 0 -7.864E-01
0 -7.866E-02 0 2.408E-011
1 6.168E-01
8-29

As the experimental eigenvector according to our initial assumption consists ofY DOF
only. Therefore the matrix [dO] will be
{dO}} {dO}} {<**>}-4.114149 14.74789 -18.57759
-13.59339 10.58724 16.3815
-24.85352 -25.00194 -24.96821
and the transpose of [dO] will be
[dO]T
-4.114149 -13.59339 -24.8535
14.74789 10.58724 -25.0019
-18.57759 16.3815 -24.9682
Performing mass and stiffness matrix reduction using the [Tm ] we get
[K] [TJ=
10922.940 -6500.338 1763.911
-891.053 935.340 -360.430
-6030.658 5997.539 -2230.644
-951.762 284.902 7.075
11834.707 -2388.565 1042.872
37.389 194.094 -125.030
The reduced stiffness matrix [K^]=
[Tm] [K] [Tm], therefore
[Kaar]~
11344.052 -6518.879 1698.645
-6518.879 6246.200 -2273.814
1698.645 -2273.814 995.812
8-30

Similarly we have
[M][TmJ=
1.434E-04 2.253E-05 -2.760E-06
3.843E-06 1.644E-05 -2.380E-06
2.179E-05 1.512E-04 1.584E-05
-2.040E-05 3.660E-06 1.202E-05
-1.080E-05 4.037E-05 5.960E-05
4.514E-06 -1.760E-05 -1.630E-05
This implies that
[Maar]=
1.553E-04 1.746E-05 -1.330E-05
1.746E-05 1.719E-04 2.909E-05
-1.330E-05 2.909E-05 5.261E-05
Similarly [AK^] is
[AK] [Tm]
330.976 -196.967 53.448
-27.000 28.342 -10.921
-182.735 181.731 -67.591
-28.839 8.633 0.214
55.593 -72.376 31.600
1.133 5.881 -3.789
[AKaar]
343.736 -197.529 51.471
-197.529 189.266 -68.999
51.471 -68.899 30.174
8-31

Similarly,
[AMHTJ
1.434E-06 2.253E-07 -2.760E-08
3.843E-08 1.644E-07 -2.380E-08
2.179E-07 1.512E-06 1.584E-07
-2.040E-07 3.660E-08 1.202E-07
-1.080E-07 4.037E-07 5-96F,-07
4.514E-08 -1.760E-07 -1.630E-07
[AMaar]=
1.553E-06 1.746E-07 -1.330E-07
1.746E-07 1.719E-06 2.909E-07
-1.330E-07 2.909E-07 5.261E-07
With the generation of the reduced system matrices to the model update method
is identical to that earlier demonstrated in Approach I. With the available data the
parameters to update the model can now be computed. Refer to eqn (6-88), where
dX,-
{d<$>}T
[K -
X,M]{d<$>) = {Of }T[[dK] - Xt [dMj]fe }
Performing the computation ofLHS of the equation we get
K[^aar] =
78.1403 8.7837 -6.6834
8.7837 86.4849 14.6363
-6.6834 14.6363 26.4666
[K -K^aarJ^
11265.912 -6527.663 1705.328
-6527.663 6159.715 -2288.451
1705.329 -2288.451 969.345
8-32

This implies that [K^- X\M^ ]{d<t>x }
1.715E-02
4.253E-01
1.868E-01
Therefore we get{d^x]T
[Kaar-XaxMaar]{d^x]
-10.49344
Note: The value of {JO,} [K^ -XaxMaar]{d<bx]is identical to the value obtained by
Approach I.
Similarly we get
[X2M^] =
3088.445 347.170 -264.159
347.170 3418.260 578.491
-264.159 578.491 1046.073
[Kaar -Xa2Maar]=
8255.607 -6866.049 1962.804
-6866.049 2827.940 -2852.306
1962.804 -2852.306 -50.262

This implies that [K^-
Xa2M^ 7{JO: }
-13.623
-6.493
5.807
Therefore we get {JO,}r
[K^-
Xa2 Maar ]{d<3>2 }
-414.8304
Similarly,
A>4^7 =
24658.853 2771.888 -2109.104
2771.888 27292.175 4618.808
-2109.104 4618.808 8352.091
[Kaar -A^aar] =
-13314.900 -9290.767 3807.749
-9290.767 -21045.980 -6892.622
3807.749 -6892.622 -7356.279
This implies that [K^-
X^M^ ]{dO,}
87.529
-68.136
22.825
Therefore we get {J03}r
[Kaar-
Xa3M^ y{J03 }
-3312.157
8-34

Performing the calculations of the RHS of eqn. (6-88)
dXt-
{dO}T
[K - A,.M]{ctt>} = {Of }T[[dK] - Xax [dM]]fe
KF<&*] =
7.814E-01 8.784E-02 -6.683E-02
8.784E-02 8.648E-01 1.464E-01
-6.683E-02 1.464E-01 2.647E-01
[dKaar]-X\[dMaar] =
342.955 -197.616 51.537
-197.616 188.401 -69.045
51.537 -69.045 29.909
This implies that [[dK^ ]-Xax [dMaar ;]{<&? } is
13.462
77.190
40.627
Therefore {<!>\}T[[dK]-\\[dM]]{<b\} is
5104.6009
Similarly
K[dM] =
30.884 3.472 -2.642
3.472 34.183 5.785
-2.642 5.785 10.461
8-35

[dKaar]-Xa1[dMaar] =
312.852 -201.000 54.112
-201.000 155.084 -74.684
54.112 -74.684 19.713
This implies that [[dK^ ] - X% [dM^ ]]{&2 } is
-2735.196
1315.297
1172.162
Therefore {o<2 }T[[dK^] -Xa2[dM^ ]]{&}] is
201755.93
Similarly,
K[dMaar] =
246.589 27.719 -21.091
27.719 272.922 46.188
-21.091 46.188 83.521
[dLaar]-X\[dMaar] =
97.148 -225.247 72.562
-225.247 -83.656 -115.087
72.562 -115.087 -53.347
8-36

This implies that [[dKaar ] - X% [dM^ ;]{o<
} is
17639.199
-13731.240
4590.250
Therefore {^[[dK^ ] -Xaz[dMaar]]{$>\}is
1610865.96
The values of the elements calculated by Approach II are identical to those
obtained by Approach I. This suggests that the model update parameter can be computed
quite accurately with less DOF data. Therefore the model update parameters can be
computed for an analytical model, of greater DOF than a corresponding experimental
model, provided the transformation matrix applied to reduce the mass and stiffness
matrices is accurate.
8-37

APPENDIX 9
Eigenvalue and Eigenvector Derivative Procedures
NASTRAN Data File

3 Mass - 3 Spring NASTRAN Data File
The data file is a complement to the accompanying data file, which uses the output of
this file to generate the eigenvalue and eigenvector derivatives. The default output of the
sequential NASTRAN run are eigenvalue derivatives. To generate the eigenvector
derivatives a routine RFALTER must be activated. The RFALTER that generates the
eigenvector derivatives is"RF53D01'
Note: To generate sensitivity analysis NASTRAN needs the MAT card, therefore dummy
CBAR elements, along with PBAR and MAT1 cards, were added to the 3 mass - 3 Spring
model.
The Solution sequence for generating eigen sensitivities is to first run SOL 63 and save
the Master database, which is accessed by the SOL 53 and the output is stored in a *.F06,
the normal output ofNASTRAN runs.
The NASTRAN data file is documented below:
ID MS3SPR3,EVIGENDERrVATIVES
SOL 63
DIAG8
TIME 10
CEND
S
TXILE=Undamped Eigenvalue Analysis and Data Base forM3S3R.DAT
SUBTrTLE=3MASS, 3 SPRING PROBLEM
S
9-1

METHOD=10
DISPLAY=ALL
SEALL = ALL
S
BEGIN BULK
S
GRID, 10 10.0,0.0,0.0 123456
GRID,1021.0,0.0,0.023456
GRID, 1032.0,0.0,0.023456
GRID,1043.0,0.0,0.023456
$
CELAS1, 1,201, 101, 1,102,1
CELASl.2,202,102, 1,103,1
CELAS 1,3,203, 103, 1,104,1
S
S Bar elements are added into the data file to give the NASTRAN run a
S Material card that is required by the SOL 53. Bars ofvery low E, I & A are
S connected to the masses.
S
CBAR,5,40 1,10 1,102,0.0,1.0,0.0 5 Bar element between 10 1 and 102
CBAR.6,401, 102,103,0.0,1.0,0.0 5 Bar element between 102 and 103
CBARJ,401,103,104,0.0,1.0,0.0 S Bar element between 103 and 104
S
PBAR,401,301,.001,1.0E-7,1.0E-7 S Area=001, Il=1.0E-7, 12=1.0E-7
MAT1,301,3.0.3,7.41E-6 S E=3.0, Rho=7.41E-6
S
CONM2,11,10225.0
CONM2,12,10325.0
CONM2,13,10425.0
S
PELAS,20 1,100.0
PELAS,202, 100.0
PELAS,203, 100.0
S
EIGR,10,GrV3,+EIGR
+EIGRMASS
ENDDATA
9-2

Method 1: SOL 53 - Data file format to generate eigenvalue and eigenvector derivatives
The following data file as discussed earlier is to be run after the run of SOL 63. More
information on the syntax and procedures of the command statements is available in the
NASTRAN documentation. The reference material is listed under the reference section.
Note: For every new run of SOL 63 after modification, it is required that the older
version of SOL 63 run be purged as this run has been created to read the first version
(i.e. version 1, see the first line of the following file). It was done to keep the data base
unaffected during eigen derivative processing. The eigenvalue and eigenvector
derivatives are output in a *.F06 file.
RESTART VERSIONS, KEEP S
ASSIGN MASTER ='M3S3.MASTER'
S
ID MS3SPR3,EVIGENDERIVATrVES
SOL 53
DIAG8
TIME 10
COMPILE DMAP=SOL53,SOUTN=MSCSOU,NOLIST,NOREF
RFALTER'rf53d01'
CEND
SENSrTY(STORE,FORT)= ALL
TTTLE=UNDAMPED EIGENVECTOR DERIVATIVE ANALYSIS
SUBTI=3MASS, 3 SPRING PROBLEM - Output should have eigenvector derivatives
S
BEGIN BULK
S DSC0NS,DSC1D,LABEL,TYPE,ID,LEAVE BLANK FOR MODES,LIMTT,OPT
DSCONS, 10 1,L1MAX,LAMA, 1
DSCONS, 102,L2MAX,LAMA,2
DSCONS, 103,L3MAX,LAMA,3
S DVAR,ID,LABEL,B(VARlABLE),DVSET-lD
DVAR,201,STIFK1,0.0 1,201
DVAR,202,STIFK2,0.0 1,202
9-3

DVAR,203,STIFK3,0.0 1,203
SDVSET,ID.TYPE,FIELD,PREF,ALPHA,PID
S THE ALTERNATE METHOD OF DVSET
S DVSET,ID,TYPE,FIELD,BLANK,PID
DVSET.20 1.PELAS.3,, 1.0,20 1
DVSET.202,PELAS,3 1.0,202
DVSET,203,PELAS,3 1 .0,203
PARAM,NORM,0
PARAM,DSZERO, l.E-2
ENDDATA
9-4

Method 2: SOL 53 - Data file format to generate eigenvalue and eigenvector derivatives
The following data file essentially generates the same outputs as the previous data file of
SOL 53. However, there are some enhancements in this data file that results in an ASCII
output of eigen derivatives. The data has been assigned to m3s3.out4 in this case and it
can be easily modified to any file the operator chooses. This file eases the compilation of
sensitivity matrix by lending itself to be readily read by a program. Thus the model
update program can be automated to give model update parameters, essential for model
tuning.
It may also be noted that the RFALTER is included in the file therefore this data file is
much bigger than previous data file (Page 9 - 3). The RFALTER - RF53D01 is included
after this file for reference.
Note: Once the RFALTER is included in the file as shown in this method, it must not be
referenced by the file again. That is, RFALTER should be used in either the format as
demonstrated in Method 1 orMethod 2, they should not be combined. The RFALTER is
include between COMPILE statement (line # 1 1) of this file to just above CEND on page
9-11.
9-5

RESTART VERSIONS, KEEP 5
ASSIGN MASTER ='m3s3.MASTER'
c_rjrfj *****************************************************************
ASSIGN OUTPUT4='m3s3.out4',FORMATTED,UNrr=l l,UNKNOWN
c cico *****************************************************************
s
ID MS3SPR3,EVTGENDERrVATrVES
SOL 53
DIAG8
TIME 10
COMPILE DMAP=SOL53,SOUTN=MSCSOU,LIST,NOREF
S BEGINNING OF RFALTER RF53D01 25-FEB-1994
5
S Compute Eigenvector derivatives in design sensitivity analysis
S
S SEE APPLICATION NOTE - JANUARY 1986 FOR DETAILS.
5
5_GCG *****************************************************************
S-GCG Modified for ASCII output of the DSCMR datablock
ALTER 137,138 5
OUTPUT4 DSCMR,y/V,Y,rrAPE=-l/V,Y,rUNrT=ll/2 5
S-GCG *****************************************************************
.ALTER 139 5 L.ABEL LBSKFOR
TYPE DB,USET,MAAKAA,GPLS,MGG,KGG,GM 5
5
S TO GENERATE DELTAB FROM EDOM
5
MATGEN /IDEN1/1/1 5 GENERATE AN IDENTTTY MATRIX OF ORDER 1
SETVAL //S,N,RECNO/0/S,N,CARDID/404 5
FILE BID=APPEND/DELTB=APPEND/DPHI=APPEND S
5
LABEL FNDVAR 5 LOOP TO FIND DVAR CARD IN EDOM...
PAR.AM //\ADDVS,N,RECNO/RECNO/ 5
PARAML IEDOM//rD7T/S,N,RECNO/l//S,N,ID 5
P.ARAM //'EQ7S,N,SW/CARDID/ID S
COND GETDLB,SWS
REPT FNDVAR,55555 5
5
LABEL GETDLB 5 TO EXTRACT ONE DELTAB AND ITS BID FROM EDOM..
PARAML IEDOM//,DTT/S,N,RECNO/S,N,VvTlDNO=4//S,N,rVAR S
PARAM //,.ADD'/S,N.WRDNOAVRDNO/3 5
PARAML IEDOM//,DTT/S,N,RECNO/S,N,WRDNO/S,N,DELB 5
PARAMR //TLOAT/S.N,RVAR//////S,N,IVAR S
PARAMR //'COMPLEX//RVAR/0.0/S,N,CVAR 5
PARAMR //'COMPLEX7/DELB/0.0/S,N,CDELB 5
S BUILD UP BID & DELTB VECTORS BY APPENDING...
.ADD IDENiyBIDl/CVARS
9-6

.ADD IDEN1,/DELTB1/V,N,CDELBS
APPEND BID1/BID/2S
APPEND DELTB1/DELTB/2S
S
LABEL IFEOC S LOOP TO CHECK IF END OF A DVAR CARD ENCOUNTERED...
PARAM //"ADD7S,N,WRDNO/WRDNO/ S
PARAML ffiDOM//*DTI7S,N,RECNO/S,N,WRDNO//S,N,NUMB S
PARAM //TEQ7S,N,SW/NUMB/-1 S
COND EOC.SWS
REFT IFEOC,55555 S
S
LABEL EOC $ LOOP TO CHECK IF END OF RECORD ENCOUNTERED...
PARAM //"ADD'/S^WRDNO/WRDNO/ 5
PARAML EDOM//DTT/S,N,RECNO/S,N,WRDNO//S,N,NUMB S
PARAM //'EQ7S,N,SW/NUMB/-1 S
COND PDATASWS
REFT GETDLB,55555 S
S
S DATA PREPARATION
S
LABEL PDATAS
SSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSS DVW PHIA REMOVED FROM OUTPUT
DIAGONALDSESM/DSWCOLUMN'
S -- CONVERT DIAGOAL MATRTX TO COLUMN
VECTOR
PARAML DELTB//TR.AILER71/S.N,NDB 5
PARAML DSESM//TRAILER72/S,N,NMOD 5
SSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSS DVW PARAML KAA// ... /NRA
REMOVED
PARAM //TNE7S,N,SWI/V,Y,NORM=0/0 S
COND PTNORM,SWIS
SETVAL////////////S,N,NORMAL/,MASS
S NORM.EQ.O =>MASS
JUMP SETOUTS
L.ABEL PTNORM S
SETVAL ////////////S,N,NORMAL/TOINT 5 ~- NORM.NE.O => POrNT(, MAX)
L.ABEL SETOUTS
PRTPARM//0/TNORMAL'
5 PRINT PARAM,NORMAL...
SSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSS DVW Q AND NOQSET ADDED
PARAML USET//USET//////'M7S,N,NOMSET/'07S,N,OMrT/
'S7S,N,SINGLE^Q7S,N,NOQSET S
P.ARAM //'AND7S,N,NODPHl/NOSAVE/NOFORT 5
S
DSVG1 KDICTDS,KELMDS,BGPDTS,SILS,CSTMS,KDICT,KELMUGVDS
OLB1,DSPT1/DKPHI///1/0 5
DSVG 1 MDICTDS.MELMDS^GPDTS^ILS.CSTMS.MDICTMELM^GVDS.,
OLB1,DSPT1/DMPH1//V,Y,WTMASS/1/0 5
SMPY.AD MGG,UGVS./MPGS/2/ 5
5
9-7

S CALCULATION OF EIGENVECTOR DERIVATIVES
S
LABEL DSEVCT S -- LOOP PER EIGEN-MODE...
PARAM //'ADD7S,N,MODE/V,N,MODE=0/ S
PARAML DSV//TJMT71/S,N,MODE/S,N,ONEl/S,N,NM/S,N,R2 S
PARAM //EQ'/S,N,SW/NM/NMOD S
COND LPEND,SWS
PAR.AM //,ADD7S,N,W/V,N,W=-4/7 S
PARAMR //tEQ7/l./ONEl////S,N,SWS
COND GTLAMASWS
REFT DSEVCT,55555 S
S
LABEL GTLAMA S GET EIGENVALUE AND GENERALIZED MASS OF THE MODE...
PARAML 0LB1//DTI72/S,N,W/S,N,LMD S
PARAMR //,COMPLEX7/LMD/0.0/S,N,CLMD S
PARAM //'ADD'/S,N,WM/W/3 S
PARAML 0LBl//TJTT/2/S,N,WM/S,N,GMSS
PARAMR //'COMPLEX7/GMS/0.0/S,N,CGMS S
PARAMR //'MPYC7///S,N,MCLMD/CLMD/(- 1.0,0.0) 5
ADD KGG,MGG/DGG//MCLMD S
EQUIV DGG,DNN/NOMSET 5
COND IFNOM,NOMSET 5
MCE2 USET,GM,DGG,/DNN, S
LABEL IFNOMS
EQUIV DNN,DFF/SINGLE 5
COND IFNOS,S INGLE S
UPARTNUSET,DNN/DFF,DSF,DFS,DSS/TN"/T7S'
5
LABEL IFNOS S
SSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSS DVW REPLACE OLD DMAP NEXT 5
STATEMENTS
SSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSS DVW WITH THE FOLLOWING 5 NEW
STATEMENTS
SSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSS DVW TAKES TO F-QEQUIV DFF.DAA/NOQSET 5
COND NOQSETl,NOQSET 5
UPARTNUSET,DFF/,DAA/F/,Q'/,0'
5
LABEL NOQSETl 5
PARAML DAA//TRAILER'/1/S,N,NRA 5
MATMOD MPGS,/MPG,/l/MODE S
MATMOD UGVSyPHlG,/l/MODE 5
SSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSS DVW INSERT THE FOLLOWING 5 STATEMENTS
SSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSS DVW TAKES TO F SIZE AND PiTCHES QUPARTN USET,UGVS/PHIAQ/G'/,F/'S71 S
EQUTV PHLAQ.PHIA/NOQSET 5
COND NOQSET2,NOQSET 5
LT.ARTN USET,PHIAQ/,PHIA./F/,Q,/,071 5
LABEL NOQSET2 5
9-8

MATMOD PHIA/PHU,/l/MODE 5
SETVAL //S.N.IR/0 5
COND FDUNIT.SWIS
S IF MASS NORMALIZATION USED, NORMALIZE TO UNITY OF MAX
COMPONENT...
SSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSS DVW MATMOD PHU /13 REMOVEDEQUIV PHU,PHU1/NEVERS
NORM PHU/PHU1/S
EQUIV PHU1.PHU/ALWAYSSS FIND POSITION OF UNrTY IN THE EIGENVECTORLABEL FDUNTTS
P.ARAM /AADD7S,N,IR/IR $
PARAML PHU//DMr/l/S,N,IR/S,N,ONEl/S,N,lNT/S,N,R2 S
PARAMR //"ABS'/S.NABSl/ONEl S
PARAMR //'EQ7/1./ABS1////S,N,SWS
COND REDUCE,SWS
REPT FDUNTT,55555 S
S REDUCE ONE ORDER OF EQUILIBRIUM EQUATION...
LABEL REDUCES
PARAM /ASUB'/S.NJRl/IR/S
PAR-AM //"SUB7S,N,IR2/NRA/IR 5
MATGEN ,/RP/6/NRA/IRl/l/IR2 S
P.ARTN D.AA,RPyDAly S
DECOMP DA1/DL7S
S
SETVAL //S,N,IB/0 S
LABEL DBLP1 S LOOP PER DESIGN CHANGE...
SETVAL //S,N,IC/TB S
PARAM /AADD'/S,N,IB/IB S
PARAM //'MPY'/S.N.IG/IC/NMOD S
P.ARAM //,ADDVS,N,IF/MODE/IG 5
S DETERMINE"LOAD"
VECTOR
MATMOD DKPHI,/DKPG,/1/IF S
MATMOD DMPHI,/DMPG,/1/IF 5
PARAML DSEGM//'DMr/S,N,IF/S.N,MODE/S,N,DLMD S
PARAMR //'COMPLEX//DLMD/0.0/S,N,CDLMD S
PARAMR //'ADDC7///S,N.CPLMD/CLMD/CDLMD 5
ADD DMPG,MPG/MMPG/CLMD/CDLMD S
ADD MMPG,DKPG/DBFG//(-l.,0.0)5
PARAML DELTB//TJMT/S,N,IB/1/S,N,DB S
PARAMR //T>rv7S,N,DDB/l./DBS
PARAMR //'COMPLEX//DDB/0.0/S,N,CDB S
ADD DBFGyFG/CDBS
SSSSSSSSSSSSSSSSSSSSSSSSSSSSSS DVW REPLACE NEXT TWO OLD DMAP
STATEMENTS
SSSSSSSSSSSSSSSSSSSSSSSSSSSSSS DVW WITH THE FOLLOWING 9 NEW DMAP
STMTS
9-9

SSG2 USET,GMDFS,FG/,FO,FS,FA,FL 5
EQUTV FAFF/OiVUT S
COND BUILDFF.OMJT S
UMERGEUSETJAFO/FFQ/TT-ArO'
S
EQUIV FFQ.FF/NOQSET S
COND BUILDFF.NOQSET S
UPARTN USET,FFQ/,FF/T7'Q7,071 S
LABEL BU1LDFF S
PARTN FFRP/Flyi S
S SOLVE FOR VI
FBS DLFl/Vl/$
S RECOVER V TO A-SET
SSSSSSSSSSSSSSSSSSSSSSSSSSSSS DVW REMOVE NEXT 7 OLD DMAP STMTS
SSSSSSSSSSSSSSSSSSSSSSSSSSSSS DVW AND REPLACE WITH THE FOLLOWING 14
STMTS
MERGE Vl,RP/VTO/l S
EQUTV VTO.VF/NOQSET S
COND NOQSET3.NOQSET S
UMERGEUSETVTO/VF/T7'Q'/'0'
S
LABEL NOQSET3 S
EQUTV VF,VN/SINGLE S
COND BUILDN,SINGLE S
UMERGE USET,W,/VN/TN7T7'S71 S
LABEL BUILDN S
EQUTV VN,VG/NOMSET S
COND BUILDG,NOMSET 5
MPYAD GMVNyVM/ S
UMERGE USET.VN.VM/VG/'GTN'/'M'/l S
LABEL BUILDG S
EQUIV VG,DEV/SWIS
COND PRINTG,SWI 5 IF NOT MASS NORMAL., GO TO PRTNTG...
SSSSSSSSSSSSSSSSSSSSSSSSS DVW REPLACE THE NEXT 2 OLD DMAP STATEMENTS
SSSSSSSSSSSSSSSSSSSSSSSSS DVW WITH THE FOLLOWING 3 NEW STMTS
DSVG 1 MDICTDS,MELMDS,BGPDTS,SILS,CSTMS,MDICT,MELM,
UGVDSOLB l,DSPTl/EGMl//V,Y,WTMASS/2/0 S
PARAML EGMl//TJMr7S,N,IF/S,N,MODE/S,N,EMI S
PARAMR //,MPY7S,N.LMD2/l./2. 5
PARAMR //DIV/S,N,EM/EMJ/LMD2 5
PARAMR //,DIV7S,N,DEM/EM/DB 5
SMPYAD MPG,VG/MPV/2////l S
PARAML MPV//T>MT/1/1/S,N,MPVG 5
PARAMR //TJIV7S,N,PVG/MPVG/GMS S
PARAMR //,ADDVS,N,C/DEM/PVG S
PARAMR //'SUB7S,N,CI/0./V,N,C S
PARAMR //,COMPLEX77CI/0.0/S.N,CCI S
SSSSSSSSSSSSSSSSSSSSSSSSSSSS DVW REPLACE THE NEXT 6 OLD DMAP
STATEMENTS
9- 10

SSSSSSSSSSSSSSSSSSSSSSSSSSSS DVW WITH THE FOLLOWING 6 NEW DMAP STMTSEQUIV PHIG.PHIGG/NOQSET S
COND NOQSET4.NOQSETS
UPARTN USET.PHIG/.PHIGMQyG'/'QT'O'/l SUMERGE USETPHIGMQ/PH1GG/'G7Q7'071 S
LABEL NOQSET4 S
ADD VG,PHIGG/DEV//CCI 5
L.ABEL PRINTG S PRINT RESULTS...
COND FMDPHLNOPRT S
MATGPR GPLS,USET,SILS,DEV//,H7,G'S
PRTPARM//0/*MODE'
S
PARAML BID//DMr7S,N,IB/l/S,N,DV S
P.ARAMR //'FTX7S,N,DV//////S,N,DESIGN S
PRTPARM//0/DESIGN'
S
L.ABEL FMDPHIS
COND NFDPHLNODPHI S
APPEND DEVyDPHI/2 S
LABEL NFDPHIS
PARAM //TQ7S,N,SW/IB/NDB 5
COND NEXTTT.SWS
REPT DBLP1.55555 S
LABEL NEXTTTS
PARAM //"EQ'/SASW/MODE/NMOD S
COND LPEND.SWS
REPT DSEVCT.55555 S
LABEL LPEND S END OF LOOP...
COND EOJ,NOFORTS
S-GCG *****************************************************************
OUTPUT4 DPFn,y/o/v,Y,ruNrr/2 s
OUTPUT4 y/-2/V,Y,IUNTT/2 5
J.^JGQ ********<*********<********************************************
LABEL EOJS
S END OF RFALTER RF53D01
CEND
SENSrrY(STORE,FORT) = ALL
TrTLE=UNDAMPED EIGENVECTOR DERIVATIVE ANALYSIS
SUBTI=3MASS, 3 SPRING PROBLEM - OUTPUT SHOULD CONTAIN DERIVATIVES
5
BEGIN BULK
S DSCONS,DSCID,LABEL,TYPE,ID,LEAVE BLANK FORMODES,LIMIT,OPT
DSCONS, 101.L 1MAX.LAMA, 1
DSCONS, 102,L2MAX,LAMA,2
DSCONS, 1 03,L3MAX,LAMA,3
S DVAR,ID,LABEL,B(V.ARIABLE),DVSET-rD
DVAR,201,STTFK1,0.0 1,201
DVAR,202.STIFK2,0.0 1,202
DV.AR.203.STTFK3,0.0 1,203
9-11

SDVSET,ID,TYPE,FIELD,PREF,ALPHA,PID
S THE ALTERNATE METHOD OF DVSET
S DVSET,ID,TYPE,FIELD,BLANK,PID
DVSET.20 1,PELAS,3 1.0,20 1
DVSET,202,PELAS,3 1.0,202
DVSET,203,PELAS,3 1 .0,203
PARAM.NORM.0
PARAM,DSZERO,l.E-2
ENDDATA
9-12

RFALTER - RF53D01: The following is the listing of the RFALTER- RF53DOI that
gives eigenvector derivatives
S BEGINNING OF RFALTER RF53D01 25-FEB-1994
S
S COMPUTE EIGENVECTOR DERIVATIVES IN DESIGN SENSITIVITY ANALYSIS
S
S SEE APPLICATION NOTE - JANUARY 1986 FOR DETAILS.
S
ALTER 139 S LABEL LBSKFOR
TYPE DB.USET,MAAKAA,GPLS,MGG,KGG,GM S
S
S TO GENERATE DELTAB FROM EDOM
S
MATGEN 7IDEN1/1/1 S -- GENERATE AN IDENTITY MATRIX OF ORDER 1
SETVAL //S,N,RECNO/0/S,N,CARDID/404 S
FILE BID=.APPEND/DELTB=APPEND/DPHI=APPEND S
S
LABEL FNDVAR S LOOP TO FIND DVAR CARD IN EDOM...
PARAM //\ADD7S,N,RECNO/RECNO/ S
PARAML IEDOM/^DTT/S,N.RECNO/l//S,N,ID S
PARAM //,EQ7S,N,SW/C.ARDID/ID S
COND GETDLB,SWS
REPT FNDVAR,55555 5
S
L.ABEL GETDLB $ TO EXTRACT ONE DELTAB AND ITS BID FROM EDOM...
P.ARAML rEDOM//,DTr/S,N,RECNO/S,N,WRDNO=4//S.N,IVAR S
PARAM //7ADD7S,N,WRDNO/WRDNO/3 S
PARAML rDOM//'DTr/S,N,RECNO/S,N,WRDNO/S,N,DELB S
PARAMR //TLOAT/S,N,RVAR//////S,N,rVAR S
PARAMR //-COMPLEX//RVAR/0.0/S,N,CVAR 5
PARAMR //'COMPLEX//DELB/0.0/S.N,CDELB S
S BUILD UP BID & DELTB VECTORS BY APPENDING...
.ADD IDENiyBIDl/CVARS
ADD IDEN1,/DELTB1/V,N,CDELBS
.APPEND BID1./BID/2S
.APPEND DELTB LTJELTB/2 S
S
LABEL IFEOC S LOOP TO CHECK IF END OF A DVAR CARD ENCOUNTERED...
PARAM //'ADD'/S.N.WRDNO/WRDNO/ S
P.ARAML IEDOM//DTI7S,N,RECNO/S,N,WRDNO//S,N,NUMB S
P.ARAM //*EQ,/S,N,SW/NUMB/-1 S
COND EOCSWS
REPT IFEOC,55555 S
S
L.ABEL EOC S LOOP TO CHECK IF END OF RECORD ENCOUNTERED...
PARAM //\ADD7S,N,WRDNO/WRDNO/ S
9-13

PARAML IED0M//'DTI7S,N,RECN0/S,N,WRDN0//S,N,NUMB S
PARAM //'EQ7S,N,SW/NUMB/-1 S
COND PDATASWS
REPT GETDLB,55555 S
S
S DATA PREPARATION
S
L.ABEL PDATAS
SSSSSSSSSSSSS$$$S$SS$SS$S$$$SSSSS$SSSS DVW PHIA REMOVED FROM OUTPUT
DIAGONALDSESM/DSWCOLUMN'
S CONVERT DIAGOAL MATRIX TO COLUMN
VECTOR
PARAML DELTB//TRAILER71/S,N,NDB S
PARAML DSESM//TRAILER72/S,N,NMOD $
SSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSS DVW PARAML KAA// ... /NRA
REMOVED
PARAM /mE7S,N,SWI/V,Y,NORM=0/0 S
COND PTNORMSWIS
SETVAL////////////S,N,NORMAL/MASS'
S NORM.EQ.O => MASS
JUMP SETOUTS
LABEL PTNORM S
SETVAL ////////////S,N,NORMAL/TOINT S NORM.NE.O => POINT(, MAX)L.ABEL SETOUTS
PRTPARM//OmORMAL'
5 -- PRINT PARAM,NORMAL...
SSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSS DVW Q AND NOQSET ADDED
P.ARAML USET//TUSET/////m7S,N,NOMSET/,07S,N,OMTi7
'S7S,N,SrNGLE/Q7S,N,NOQSET 5
PARAM 7AND7S,N,NODPHI/NOSAVE/NOFORT 5
S
DSVG1 KDICTDS,KELMDS,BGPDTS,SILS,CSTMS,KDICT,KELM,UGVDS
OLB1,DSPT1/DKPHI///1/0 5
DSVG1 \ICTDS>ELiMDS,BGPDTS,SILS,CSTMS,MDICT,MELMUGVDS,,
OLB1,DSPT1/DMPHI//V,Y,WTMASS/1/0 S
SMPYAD MGG,UGVS/MPGS/2/ 5
5
S CALCULATION OF EIGENVECTOR DERIVATIVES
S
L.ABEL DSEVCT S LOOP PER EIGEN-MODE...
P.ARAM //\ADD7S,N,MODE/V,N,MODE=0/ S
PARAML DSV//DMr71/S,N,MODE/S,N,ONEl/S,N,NM/S,N,R2 S
PARAM //,EQ7S,N,SW/NM/NMOD S
COND LPEND,SWS
PAR-AM //'ADD7S,N,W/V,N,W=-4/7 5
P.ARAMR //"EQ7/l./ONEl////S,N,SWS
COND GTLAMASWS
REPT DSEVCT.55555 S
5
L.ABEL GTLAMA S -- GET EIGENVALUE AND GENERALIZED MASS OF THE MODE..
9-14

PARAML OLBl//T>TT72/S,N,W/S,N,LMD S
PARAMR //'COMPLEX//LMD/0.0/S,N,CLMD S
PARAM //'ADD7S.N,WM/W/3 S
P.ARAML 0LB1//'DT172/S,N,WM/S,N,GMS S
P.ARAMR //*COMPLEX7/GMS/0.0/S,N,CGMS S
PARAMR //'MPYC7///S.N,MCLMD/CLMD/(-1.0,0.0) S
ADD KGG.MGG/DGG//MCLMD S
EQUIV DGG.DNN/NOMSET S
COND IFNOMNOMSETS
MCE2 USET,GM,DGG,/DNN, S
LABEL IFNOM $
EQUIV DNN,DFF/SINGLE 5
COND IFNOS.SINGLE S
UPARTNUSET,DNN/DFF,DSF>DFS,DSS/TN7TTS'
S
LABEL IFNOS S
SSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSS DVW REPLACE OLD DMAP NEXT 5
STATEMENTS
SSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSS DVW WITH THE FOLLOWING 5 NEW
STATEMENTS
SSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSS DVW TAKES TO F-QEQUIV DFF.DAA/NOQSET S
COND NOQSETLNOQSET S
UP.ARTNUSET,DFF/,DAA/F'/,Q'/,0'
S
L.ABEL NOQSET1 S
PARAML DAV/TRATLER71/S,N,NRA S
MATMOD MPGSyMPGyi/MODE S
MATMOD UGVSyPHIGyi/MODE S
SSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSS DVW INSERT THE FOLLOWING 5 STATEMENTS
SSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSS DVW TAKES TO F SIZE AND PITCHES Q
UPARTN USET,UGVS/PHIAQ/G*/'F/,S71 S
EQUTV PHIAQ.PHIA/NOQSET S
COND NOQSET2,NOQSET S
UP.ARTN USET,PHLAQ/,PHIA/F/'Q7,071 S
LABEL NOQSET2 S
MATMOD PHLA,/PHU,/l/MODE S
SETVAL //S.N.IR/0 S
COND FDUNIT,SWIS
S IF MASS NORMALIZATION USED, NORMALIZE TO UNITY OF MAX
COMPONENT...
SSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSS DVW MATMOD PHIJ .... /1 3 REMOVED
EQUIV PHU.PHJJl/NEVERS
NORM PHU/PHIJ1/S
EQUTV PHIJ I,PHJJ/ALWAYS S
S FIND POSITION OF UNITY IN THE EIGENVECTOR...
LABEL FDUNTTS
PARAM //,ADD7S,N,IR/IR S
PARAML PHU//,DMI71/S,N,IR/S,N,0NE1/S,N,INT/S,N,R2 5
9-15

PARAMR /AABS7S,N,ABS1/0NE1 S
PARAMR //'EQ7/l./ABSl////S,N,SWS
COND REDUCE,SWS
REPT FDUNIT,55555 S
5 REDUCE ONE ORDER OF EQUILIBRIUM EQUATION...
LABEL REDUCES
PARAM //*SUB7S,N,IR1/TR/S
PARAM //'SUB7S,N,IR2/NRA/IR S
MATGEN /RP/6/NRA/IR1/1/IR2 S
PARTN DAARPyDALJS
DECOMP DA1/DL/S
S
SETVAL //S,N,IB/0 S
LABEL DBLP1 S ~- LOOP PER DESIGN CHANGE...
SETVAL //S,N,IC/TB S
PARAM //*ADD7S,N,IB/TB S
PARAM //"MPY/S.NJG/IC/NMOD S
P.ARAM //"ADD'/S.KIF/MODE/IG S
S DETERMINE"LOAD"
VECTOR
MATMOD DKPHI,/DKPG,/1/IF S
MATMOD DMPFflyDMPGyi/IF S
PARAML DSEGM//,DMI7S,N,IF/S,N,MODE/S,N,DLMD 5
PARAMR //"COMPLEX7/DLMD/0.0/S,N,CDLMD 5
PARAMR //'ADDC7///S,N,CPLMD/CLMD/CDLMD S
ADD DMPG,MPG/MMPG/CLMD/CDLMD S
ADD MMPG,DKPG/DBFG//(-l.,0.0) S
PARAML DELTB//,DMI7S,N,rB/l/S,N,DB S
PARAMR //T>rv7S,N,DDB/l./DB 5
PARAMR //'COMPLEX7/DDB/0.0/S,N,CDB 5
ADD DBFG/FG/CDBS
SSSSSSSSSSSSSSSSSSSSSSSSSSSSSS DVW REPLACE NEXT TWO OLD DMAP
STATEMENTS
SSSSSSSSSSSSSSSSSSSSSSSSSSSSSS DVW WITH THE FOLLOWING 9 NEW DMAP
STMTS
SSG2 USET,GMDFS,FG/,FO,FS,F.A,FL S
EQUTV FAFF/OMIT S
COND BUILDFF.OMIT 5
UMERGEUSET,FAF0/FFQ/,F7A'/'0'
5
EQUTV FFQ,FF/NOQSET S
COND BUTLDFF,NOQSET S
UP.ARTN USET,FFQ/,FF/T7'Q'/'071 5
LABEL BUILDFF S
PARTN FFRP/F1,/1 S
5 -- SOLVE FOR VI
FBS DLF1/V1/S
S -- RECOVER V TO A-SET
SSSSSSSSSSSSSSSSSSSSSSSSSSSSS DVW REMOVE NEXT 7 OLD DMAP STMTS
9-16

SSSSSSSSSSSSSSSSSSSSSSSSSSSSS DVW AND REPLACE WITH THE FOLLOWING 14
STMTS
MERGE VI RP/VTO/1 S
EQUIV VTO.VF/NOQSET S
COND NOQSET3,NOQSET S
UMERGEUSETVTO/VF/'F/,Q7'0,
S
LABEL NOQSET3 S
EQUIV VF.VN/SINGLE S
COND BUILDN.SINGLE $
UMERGE USET.VF/VN/'N'/'F/'S'/l $
LABEL BUILDN S
EQUIV VN.VG/NOMSET S
COND BUILDG.NOMSET S
MPYAD GM,VN/VM/ S
UMERGE USET,VN,VM/VG/'G'/TN,/,M71 S
LABEL BUILDG S
EQUTV VG,DEV/SWI $
COND PRINTG.SW1 S IF NOT MASS NORMAL., GO TO PRINTG...
SSSSSSSSSSSSSSSSSSSSSSSSS DVW REPLACE THE NEXT 2 OLD DMAP STATEMENTS
SSSSSSSSSSSSSSSSSSSSSSSSS DVW WITH THE FOLLOWING 3 NEW STMTS
DSVG1 MDICTDS,MELMDS,BGPDTS,SILS,CSTMS,MDICT,MELM,
UGVDS0LB1,DSPT1/EGM1//V,Y.WTMASS/2/0 S
P.ARAML EGMl//DMr/S,N,IF/S,N,MODE/S,N,EMI S
PARAMR //'MPY/S,N,LMD2/l./2. S
PARAMR //'DIV7S,N,EM/EMI/LMD2 5
P.ARAMR //*DrV/S,N,DEM/EM/DB S
SMPYAD MPG,VG,/MPV/2////l S
P.ARAML MPV//rDMT/l/l/S,N,iMPVG 5
PARAMR //TW/S,N,PVG/MPVG/GMS S
P.ARAMR //'ADD'/S.N.C/DEM/PVG S
P.ARAMR //'SUB7S,N,CI/0yV,N,C S
PARAMR /yCOMPLEX7/CI/0.0/S,N,CCI S
SSSSSSSSSSSSSSSSSSSSSSSSSSSS DVW REPLACE THE NEXT 6 OLD DMAP
STATEMENTS
SSSSSSSSSSSSSSSSSSSSSSSSSSSS DVW WITH THE FOLLOWING 6 NEW DM.AP STMTS
EQUTV PHIG,PHIGG/NOQSET S
COND NOQSET4.NOQSET S
UP.ARTN USET,PHIG/,PHIGMQ,/G,/'Q7'071 S
UMERGE USETPfflGMQ/PHIGG/,G7,Q7,071 S
LABEL NOQSET4 S
ADD VG.PHIGG/DEV//CCI S
LABEL PRINTG S ~- PRINT RESULTS...
COND FMDPHLNOPRTS
MATGPRGPLS,USET,STLS,DEV//'H'/'G'
S
PRTPARM//O/'MODE'
S
P.ARAML BID//DMI7S,N,IB/1/S,N,DV S
P.ARAMR //TLX7S,N,DV//////S,N,DESIGN S
9-17

PRTPARM //O/TJESIGN S
L.ABEL FMDPHIS
COND NFDPHI.NODPHI S
APPEND DEV./DPHI/2S
L.ABEL NFDPHI S
PARAM //'EQ7S,N)SW/IB/NDB S
COND NEXTTT.SWS
REPT DBLP1,55555 S
LABEL NEXTTTS
PARAM /yEQ7S,N,SW/MODE/NMOD S
COND LPEND,SWS
REPT DSEVCT,55555 S
LABEL LPEND S END OF LOOP...
COND EOJ,NOFORTS
OUTPUT4 DPffl,.,y//V,Y,IUNTT $
OUTPUT4 ,,y/-2/V,Y,IUNTT S
LABEL EOJS
S END OF RFALTER RF53D0 1
9-18

SOL 63 Data File: For 3 Element beam model
The following two files are for generating the eigenvalue and eigenvector sensitivities for
a beam model. They are very similar to files on pages 9 -1 to 9 - 4.
ID BEAM, EIGENDERIVATIVES
S Creating a simple 3 element beam model to understand the sensitivity (DSA)S procedures on coupled systems.
TIME 15
DIAG8
SOL 63
S Defines the Solution in terms of either static, dynamic or bucklingS
COMPILE DMAP=SOL3,SOUTN=MSCSOU,NOLIST,NOREF $
ALTER 437 S
S
S The following portion is from Hammer's routine to get the internal and external grid
S definitions to match. The NASTRAN solver reassigns node numbers to reduce the
S band-width of the matrices that it solves. During this assignment of the node numbers
$ the numbers as assigned by the operator are overridden and the output is presented in
S the internal numbered order. The routine written byMark Hammer forces NASTRAN
S solver to output data in the node number order as defined by the operator.
S Hammer's routine ends just above the comment line indicating the end of the routine.
S
DELETE /P2G,y S
MATGEN EQEXIN/EXTINT/9/O/LUSET $ REFER TO MATGEN IN SEC 5.4 USM2
S
VEC USET/GVEC/,G7,Q7,COMF S CREATES A PARTITION VECTOR GVEC
S
MPYAD EXTINT,UGVyUGVEXT/l
SMPYAD EXTTNT,MGG,EXTINT,,/NlGGEXT/3////l/7//6 S
SMPYAD EXTINTJCGG,EXTINT,,yKGGEXr/3/7//l/7//6 S
MPYAD EXTTNT,GVECyGVEC2/l S
PARTN UGVEXTGVEC2/rPHTVO2,y0/0 S
PARTNMGGEXT,GVEC2/,MGGNEW/-1 S
PARTN KGGEXT,GVEC2yrECGGNEW/-l S
S End Hammer's routine
S
OUTPUT4 PHTV02,MGGNEW,KGGNEW//-3/l 1 S ASCII OUTPUT
S MATPRN UGV,MGG,KGG// S
S MATPRN UGVEXT>IGGEXT JCGGEXT// S
MATPRN PHJV02,MGGNEW,KGGNEW//S
9-19

s
CEND
TITLE= MODAL ANALYSIS OF BEAM
SUBTITLE =
FLXED-FREE, 6 X 1 X . 125
ECHO=BOTH
METHOD=10
DISPLAY=ALL
SEALL = ALL
BEGIN BULK
S
param,post,0
param,grdpnt,0
param,coupmass,l
S
GRJD,10.0,0.0,0.0123456
GRJD.2,,2.0,0.0,0.0,,345
GRJD,34.0,0.0,0.0345
GRID,46.0,0.0,0.0345
S
CBAR, 1,1 01, 1,2,0.0, 1.0,0.0
CBAR,2,101,2,3,0.0,1.0,0.0
CBAR,3,101,3,4,0.0,1.0,0.0
S
PBAR,101,201,.25,1.302E-3,2.083E-2,5.997E-4 $ Original B and H
S PBAR,101,201,.13125,1.709E4,1.205E-2,5.997E-4 S 5% increase inB
S PBAR,101,201,.13125,1.884E-4,1.094E-2,5.997E-4 $ 5% increase inH
MAT 1 ,20 1 ,3.0E7.3,7.41E-4
EIGR,10,GIV3+EIGR
+EIGR>LASS
ENDDATA
9-20

SOL 53 Data File: For 3 element Beam model.
RESTART VERSIONS, KEEP S
ASSIGNMASTER =BM2D.MASTER'
S
ID BMlR^VIGENDERIVATrVES
SOL 53
DIAG8
TTME 10
COMPrj_EDMAP=SOL53,SOUTN=MSCSOU,NOLIST,NOREF
RFALTER'rf53d01'
CEND
SENSITY(STOREJORT)= ALL
TITLE=UNDAMPED EIGENVECTOR DERTVATTVE ANALYSIS
SUBTI= 3 ELEMENT BEAM MODEL- THE OUTPUT SHOULD CONTAIN
DERIVATIVES
S
BEGIN BULK
S DSCONSJJSCIDXABEL,TYPE,ID,LEAVE BLANK FORMODES,LIMIT,OPT
DSCONS, 1 0 1X 1MAXXAMA, 1
DSCONS, 1 02,L2MAX,LAMA,2
DSCONS,103X3MAX,LAMA,3
S DVAR,rDXABEL3(VARIABLE)JJ)VSET-ID
DVAR,20 1AREA 1 ,0.0 1 ,20 1
DVAR,202>ioIn 1,0.01 ,202
S DVAR,202AREA2,0.05,202
S DVAR,203AREA3,0.05,203
S DVSET.ID.TYPEJFIELDPREFALPHAJID
S THE ALTERNATE METHOD OF DVSET
S DVSET,TD,TYPE7FTELD,BLANKPID
DVSET^01PBAR,4 1.0,1 01
DVSET,202,PBAR,51.0,101
PARAM,NORM,0
PARAM,DSZERO, 1 .E-2
MATl,201,3.0E7.3,7.41E-4
ENDDATA
9-21

APPENDLX 10
NASTRAN Data Cards
(Page numbers correspond to that ofNASTRANManuals)

ASSIGN
INPUT DATA DESCRIPTIONS
File Management Statement: ASSIGN
Description: Assigns physical file names to DBset members or special FORTRAN files which are used byother FMS statements or DMAP modules.
Format 1 : Assign a DBset member name.
ASSIGN log-name - lOenameT [ TEMP DELETE SYS -'ays-spec*
]
Format 2: Assign a FORTRAN file.
,[.
r NEW}
ASSIGN logical-key -fBenamerl STATUS -J OLD \ UNIT-u .
L IunknownJ
f FORMATTED 1 "IF0RM "
{unformatted}1EMP delete^ "
'w-vec-j
Examples:
1 . Assign the DBALL DBset:
ASSIGN DB1 -filename of member DBV
INIT DBALL LOGI-(DBI)
2. Assign FORTRAN file 12 to the OUTPUT4 module using the BCD option:
ASSIGN OUTPUT4-filename of FORTRANfile"
UNIT-12
Describers:
log-name The name of a DBset member name, log-name is also referenced on an INIT statement
after the LOGICAL keyword.
filenamel The physical filename assigned to the DBset member
TEMP Requests that filenamei is deleted at the end of the run
DELETE Requests that filenamei, if it exists before the start of the run, is to be deleted
logical-key Specifies defaults for STATUS, UNIT, and FORM of FORTRAN files for other FMS
statements, DMAP modules, punching and plotting operations
filename2 The physical file name assigned to the FORTRAN file
STATUS Specifies whether the FORTRAN file is being created (STATUS-NEW) or has been
created prior to the run (STATUS-OLD). If its status is not known, then
STATUS-UNKNOWN is specified.
(Continued)
2.2-27 (8/5/91)

ASSIGN
UNIT-u
FORM
sys-spec
Remarks:
GENERAL DESCRIPTION OF INPUT DATA
ASSIGN (Cortt.)
u is the FORTRAN unit number of the FORTRAN file
Indicates whether the FORTRAN file is written in ASCII (FORM-FORMATTED) or binary
(FORM-UNFORMATTED) format.
System specific or machine-dependent controls for IBM-type computers only. See
Remark 8.
1 . The ASSIGN statement and its applications are discussed further in Section 2.2.2.
2. The logical-key names and their default attributes which may be assigned by the user are:
logical- Default Default Default
key Name STATUS UNIT FORM Application
DBC NEW 40 UNFORMATTED DBC module - PARAM, POST, 0
DBMIG NEW 21 UNFORMATTED Database Migration from
Version 65C - SOL 0
INPUTT2 OLD none UNFORMATTED INPUTT2 module
INPUTT4 OLD none UNFORMATTED INPUTT4 module
OUTPUT2 NEW none UNFORMATTED OUTPUT2 module
OUTPUT4 NEW none UNFORMATTED OUTPUT4 module
DBUNLOAD NEW 50 UNFORMATTED DBUNLOAD FMS statement
DBLOAD OLD 51 UNFORMATTED DBLOAD FMS statement
USERFILE none none none User-defined
The defaults may be overridden on the ASSIGN statement.
3. There are certain reserved names which may not be used for log-names or logical-key names:
SEMTRN, LNKSWH, MESHFL. LOGFL, INPUT, PRINT, INCLD1, and CNTFL. If they are
used, then a fatal message is issued. Also unit numbers 1 through 10 and 14 should not be
assigned. PUNCH and PLOT may be used but are not recommended.
4. If one of the logical-key names indicated in the Remarks 2 and 3 is not specified on this
statement, then it is assumed to be a DBset member name log-name as shown in Format 1 .
(Continued)
2.2-28 (8/5/91)

ASSIGN
INPUT DATA DESCRIPTIONS
ASSIGN (Cont.)
5. The logical-key names: DBUNLOAD and DBLOAD, may be assigned only once in the FMS
section. The others may be assigned as many times as needed for the application. But, in ail
logical-key assignments, the unit number, u, must be unique, tf it is necessary to execute the
INPUTT4 and OUTPUT4 modules on the same unit, then specify ASSIGN OUTPUT4 only.
The same is recommended for the INPUTT2 and OUTPUT2 modules.
6. STATUS UNIT, and FORM are ignored if assigning a log-name (DBset member name).
7. FORM-FORMATTED must be specified for a unit when:
a. BCDOPT 1 is specified on the INPUTT4 and OUTPUT4 DMAP modules which proc
esses the unit. See Section 5.4.
b. FORMAT-NEUTRAL is selected on the DBUNLOAD and DBLOAD FMS statements which
processes the unit. See Section 2.2.2.3.
8. See Section 7.522 of the MSC/NASTRAN Application Manual for further information on
machine dependent aspects of the ASSIGN statement.
2.2-29 (8/5791)

RESTART
GENERAL DESCRIPTION OF INPUT DATA
File Management Statement: RESTART
Description: Requests that data stored in a previous run be used in the current run.
Format:
fversion-ID] f KEEP }1RESTART [-]
PROJECT-'project-ID'VERSION-
j y^j MNOKEEPM
Descrfeers:
project-ID
versionJD
LAST
KEEP
NOKEEP
Project identifier. See PROJ FMS statement Must be enclosed in single quotation
marks. (Character string, maximum of 40 characters, default is the current project-ID.)
Version number (integer > 0)
Requests restart to proceed from the last version under project-id.
Data stored under version-ID will remain on the database after the run is completed.
Data stored under version-ID will be deleted from the database after the run is completed.
Remarks:
1 . There may be only one RESTART statement in the File Management Section.
2. Restarts are always assigned a new version-ID by MSC/NASTRAN.
3. Restarts always start at the beginning of a specified DMAP or SOL sequence and queries the
database in two phases.
Phase 1 : Conceptually this phase marks all appropriate existing Database Data Blocks and
Parameters as existing for the current restart run.
(Continued)
2.2-50(8/5/91)

RESTART
INPUT DATA DESCRIPTIONS
RESTART (Cont.)
Phase 2: This phase then conceptually checks the current input against the version from
which the restart Is starting from and deletes from the Phase 1 determined
Database Data Blocks and Parameters any Data Blocks which were modified
because of Input. This phase is performed by the RESTART module(s) contained
within the solution's DMAP.
4. Restart only executes DMAP Modules for which some or all of the output does not exist on the
current version database. The S- type Parameter Is considered as an output data block for
restart purposes, hence if It is not listed in the NDDL, then the module which contains it will be
reexecuted. AO DMAP modules are executed until the first RESTART module after which
output checking is performed. Forced execution of modules after this point may be manually
controlled by SYSTEM(109) flag.
5. If project-ID or version-ID or both are specified and cannot be found a FATAL errorwill occur.
S. The RESTART statement is also required for the unstructured solution sequences. However,
for them Remark 4 Phase 3 and Remark 4 do not apply.
7. If the PROJECT keyword is not specified, then the run will restart from the project-ID specified
on the PROJ statement. (See example below.)
Examples:
1. RESTART VERSION-7
Version number 7 will be retrieved for this run (version 8). At the end of the run version 7 will
be deleted.
2.PROJ-'FENDER'
RESTART
The last version under project-id FENDER will be used in the current run.
2.2-51 (8/5/91)

COMPILE
GENERAL DESCRIPTION OF INPUT DATA
Executive Control Statement: COMPILE
Description: Requests the compilation of a subDMAP, subDMAP alter or RF Alter, or NDDL sequence.
Format 1: Compile a subDMAP. subDMAP alter, or RF Alter sequence.
["SUBDMAP "I
I DMAP "JCOMPILE n,..a
- subDMAP-name SOUIN - souin-DBset SOUOUT - souout-DBset
( LIST 1 f REF ) f DECK VOBJOUT - obJout-OBset jN0USTj L^F> { nODECk}
Format 2: Compile an NDDL sequence
COMPILE NDDL - nddl-name J SOUIN - souin-dbset If LIST If REF If DECK 1
[SOUOUT-souout-dbsetj [NOUSTJ JnOREFJ {nODECKJ
Example(s):
1. Compile Rigid Format After RF24D74 in SOL 24. (RFALTER is another Executive Control
statement.)
COMPILE SOL24 SOUIN-MSCSOU NOREF NOLIST
RFALTER RF24D74
CEND
2. Compile a subOMAP catted MYDMAP (SUBDMAP and END are DMAP statements, see
Section 5.)
COMPILE MYDMAP
SUBDMAP MYDMAP $
ENDS
CEND
3. Obtain a listing of the NDDL for Solutions 0-99.
ACQUIRE NDDLOLD
COMPILE NDOL-NDDLOLD SOUIN-MSCSOU NOREr
CEND
(Continued)
2.2-53 (8/5/91)

COMPILE
INPUT DATA DESCRIPTIONS
COMPILE (Com.)
Descnbers:
subDMAP-name The name of a subDMAP sequence. It must be 1 to 8 characters in length and the
first character must be alphabetic The keywords DMAP and SUBDMAP are
optional and do not have to be specified.
rtddt-name The name of an NDDL sequence. It must be 1 to 8 characters in length, and the
first character must be afchatoetic. The keyword NDDL must be spedHed.
souin-OBset The name of a DBset from which the subDMAP or NDDL source statements win be
retrieved.
souout-DBset The name of a DBset on which the subDMAP or NDDL source statements will be
stored. The default is the SCRATCH DBset.
objout-DBset The name of a DBset on which the subDMAP object code will be stored. The
default is the OBJSCR DBset
L1ST.NOLIST LIST requests a compiled listing of the subDMAP or NDDL sequence. NOLIST
suppresses the listing. LIST is the default
REF.NOREF REF requests a compiled cross reference of the subDMAP or NDDL sequence.
NOREF suppresses the cross reference. REF is the default.
DECK.NODECK DECK requests the subDMAP or NDDL source statements to be written to the
PUNCH file. NODECK suppresses the writing to the PUNCH file. NOOECK is the
default.
Remarks:
1."SOUIN-MSCSOU"
must be specified on this statement in order to alter a MSC/NASTRAN
Solution Sequence with the ALTER or RFALTER Executive Control statement. Valid
subDMAP names for MSC/NASTRAN solution sequences are given in Section 3.1 .
a. For the unstructured structured solution sequences (SOLs 0-99), the subDMAP-name is
formed by appending the solution number to the string "SOL". For example,"SOL24"
is
the subDMAP-name of MSC/NASTRAN Solution 24.
2.
b. For the structured solution sequences (SOLs 100-200), the subDMAP-names do not
follow a similar scheme. The "COMPILER LISTREF"
statement may be used to deter
mine the appropriate subDMAP-name.
If a subDMAP is being compiled and"SOUIN-souin-DBset"
is specified, then the RFALTER or
ALTER Executive Control statement must appear immediately after this statement. If not, then
the SUBDMAP DMAP statement must appear immediately after this statement, see Section 5.
(Continued)
2.2-59 (8/5/91)

COMPILE
GENERAL DESCRIPTION OF INPUT DATA
COMPILE (Com.)
DBsets USRSOU and USROBJ are automatically created as described in Section 2.2.2.1 and
may be specified for souin-dbset (or souout-dbset) and objout-dbset, respectively. They maybe used to store the subDMAP source statements and object code on the primary database
for reexecutJon in a subsequent run. For example:
In the first run. compfle and store a subDMAP called MYDMAP.
COMPILE MYDMAP SOUOUT-USRSOU OeJOUT-USROBJ
SUBDMAP MYDMAP $
ENDS
CEND
In the second run, execute MYDMAP stored in previous run. The LINK statement is required
to retrieve the object code from the USROBJ DBset.
SOL MYDMAP
LINK MYDMAP INCL-USROBJ
CEND
In the third run, alter MYDMAP and execute.
SOL MYDMAP
COMPILE MYDMAP SOUIN-USRSOU
ALTER ...
CEND
4. If SOUOUT or OBJOUT is specified and a subDMAP with the same name as subDMAP-name
already exists on the database, then its source statements or object code will be replaced.
5. A COMPILE statement is required for each subDMAP to be compiled. If two or more
COMPILE statements reference the same subDMAP-name, then onry the last is used in the
linking of the object code.
(Continued)
2.2-60 (8/5/31)

COMPILE
INPUT DATA DESCRIPTIONS
COMPILE (Com.)
6. Only one COMPILE statement for an NDDL sequence may be specified in the input file.
a."SOUIN-souin-OBset"
requests only a compilation of the NDDL sequence stored on
souin-DBset for purposes of obtaining a listing or a cross reference, and it cannot be
modified with the ALTER statement See example 3 above. For SOLutJons 0-99, specify
NDDL-NDOLOLD or. for SOLuttons 100-200. NDDL-NDDL on the COMPILE statement
and the ACQUIRE FMS statement or the SOL statement must be specified In order to
attach the corresponding "Delivery Database".
b. In order to"alter"
the MSC/NASTRAN NDDL sequences, then the entire modified NDDL
sequence is included after the COMPILE statement and"SOUIN-souin-OBset"
is not
specified.
c. "SOUOUT-souout-DBsef requests the storage of the NDDL source statements on the
souout-DBset and may not be specified with "SOUIN-souin-OBset".
7. The COMPILER statement may be used to override the defaults of LIST, REF, NODECK. In
other words, if LIST or NOL1ST, REF or NOREF, or DECK or NODECK is not specified, then
the corresponding option on the COMPILER statement will be used. In the following example,NOREF on the COMPILER statement will override the default of REF on the COMPILE
statement.
COMPILER NOREF
COMPILE MYDMAP
3. MSCSOU and MSCOBJ. specified with SOUOUT and OBJOUT, are special DBsets similar to
USRSOU and USROBJ except that they are used in the creation or modification of a "DeliveryDatabase"
For an example application see Section 7.6.3.3 of the MSO'NASTRANApplication
Manual.
2.2-61 (8/5/91)

RFALTER
INPUT DATA DESCRIPTIONS
Executive Control Statement: RFALTER
Description: Insert an MSONASTRAN Rigid Format After
Format:
RFALTER rfaiter_name
Describere:
rfalter_name Name of an MSC/NASTRAN Rigid Format Alter
Remarks:
1 . The MSC/NASTRAN Rigid Format Alters are described in Section 3.5.
2. The RF alter statement must be preceded by a COMPILE statement
3. An RF after statement is required for each Rigid Format Alter.
Example:
Insert RF24D74 and RF24D81 into SOL 24:
SOL 24
COMPILE SOL24 SOUIN-MSCSOU
RFALTER RF24D74 $ RESEQUENCING
RFALTER RF24D81 $ GRID POINT STRESS
CEND
2.2-73 (8/5/91)

SOL
GENERAC DESCRIPTION OF INPUT DATA
Executive Control Statement: SOL
Description: Specifies the main subDMAP to be executed.
Format:
SOL itmiin M SOLIN-obf-DBset NOEXE ]
| subDMAP-name f
Describers:
n The solution number (positive integer) for the main subDMAP. See Section 3.1 for
the list of valid numbers.
subDMAP-name The name of a main subDMAP. See Section 5.2 for naming convention.
obj-OBset The character name of a DBset where the OSCAR is stored. See Remarks 1 and
2.
NOEXE Suppresses execution
Remarks:
1 . If SOLIN keyword is not given and if there are no LINK statements within the input data, the
program will perform an automatic link. The program will first collect the objects created in the
current run by the COMPILE statement and the remaining objects stored in the MSCOBJ
DBset. The program will then perform an automatic link of the collected objects.
2. If the SOLIN keyword is not given but a LINK statement is provided, the SOLIN default will be
obtained from the SOLOUT keyword on the LINK statement.
3. The OSCAR (Operation Sequence Control ARray) defines the problem solution sequence.
The OSCAR consists of a sequence of entries with each entry containing all of the information
needed to execute one step of the problem solution. The OSCAR is generated from informa
tion supplied by the user through his entnes in the Executive Control Section.
4. The SOLIN keyword will skip the automatic link and execute the OSCAR on the specified DBset.
(Continued)
2.2-74 (8/5/91)

SOL
INPUT DATA DESCRIPTIONS
SOL (Com.)
Examples:
SOL 103
The above would execute a Solution Sequence 103 from MSCOBJ.
SOL 103$
COMPILE PHASE1,SOUIN-MSCSOU
ALTER 105
TABPT SETREE...// $
ENDALTER $
LINKSEMODESS (optional)
The above would alter the PHASE 1 subdmap contained within SOL 103, relink it onto OBJSCR DBset
(default SOLOUT for LINK) and execute the altered solution sequence.
SOL DYNAMICS, SOLIN - USROBJ
The above would execute from the USROBJ library as solution sequence called DYNAMICS.
2.2-75 (8/5/91)

TIME
GENERAL DESCRIPTION OF INPUT DATA
Executive Control Statement: TIME
Description: The TIME statement is used to set the execution time of an MSC/NASTRAN job.
Format:
TiMEMt1[.t2]
Describers:
t1 Maximum allowable execution time in CPU minutes. t1 is a real or Integer number. Thus. 1.5 is
equivalent to 90 seconds. The default time is one minute.
t2 The I/O limit in seconds. Default is machine infinity.
Remarks:
This statement is optional.
Examples:
The following would designate a run time of 8 hours.
TIME 480
2.2-76(8/5/91)

METHOD
GENERAL DESCRIPTION OF INPUT DATA
Case Control Command: METHOD - Real Eigenvalue Extraction Method Selection
Description: Selects the Real Eigenvalue Extraction Parameters
Format:
[^']-"
Example(s):
METHOD - 33
METHOD(FLUID) - 34
Oescribers Meaning
n Set identification number of an EIGR or EIGRL Bulk Data entry for normal modes or modal
formulation or an EIGB or EIGRL entry for buckling (Integer > 0)
Remarks:
1 An eigenvalue extraction method must be selected when extracting real eigenvalues using
DMAP modules READ or REIGL.
2. If the set identification number selected is present on both EIGRL and EIGR and/or EIGB
entries, the EIGRL entry will be used. This entry requests the Lanczos eigensolution method.
3. METHOD(FLUID) permits a different request of EIGR or EIGRL for the fluid portion of the
model from the structural portion of the model in coupled fluid-structural analysis. See Section
1.16.
a. If not specified, then the METHOD selection of the structure will be used for the fluid and
modal reduction will not be performed on the fluid portion of the model in the dynamic
solution sequences.
b. The METHOD(FLUID) and METHOD(STRUCTURE) may be specified simultaneously in
the same subcase for the residual structure only.
c. The auto-omit feature (see Section 3.3.11) is not recommended. Therefore, only those
methods of eigenvalue extraction which can process a singular mass matrix should be
used, for example, EIGRL entry or MGIV and MHOU on the EIGR entry.
2.3-56 (3/5/91)

SENSITY
CASE CONTROL
Case Control Command: SENSITY - Sensitivity Matrix Request
Description: Requests combined Constraint/Design Sensitivity Matrix to be generated
Format:
ccwcitv IV PRINT NOSTORE NOFORT\T ("ALLISENS,TY
L(NOPRiNT-STO^E---FORT-)J-l-n-/
Examp)e(s):
SENSITY - 19
Describers Meaning
PRINT The primer will be the output medium.
NOPRINT No primed output is requested.
STORE The results will be stored on the data base.
NOSTORE The results will not be stored on the data base.
FORT The results will be output on a user FORTRAN file.
NOFORT There will be no FORTRAN output
ALL Combine Design Sensitivity/Constraint matrix requests for all DSCONS and DSVAR
entries in the Bufc Data.
n Set identification of previously appearing SET2 command. Only those DSCONS and
DSVAR entries whose identification numbers appear on the SET2n command will be
included in the combined Design Sensitivity/Constraint matrix generation request.
Remarks:
NOPRINT, STORE, and FORT may be requested in a SENSITY output request.
2.3-92 (8/5/91)

CBAR
GENERAL DESCRIPTION OF INPUT DATA
Bulk Data Entry: CBAR - Simple Beam Element Connection
Description: Defines a simple beam element (BAR) of the structural model
Format:
1 2 3 4 5 6 7 10
CBAR EID PID GA GB X1.G0 X2 X3
PA PB W1A W2A W3A W1B W2B W3B
Example(s):
CBAR 2 39 7 3 13
513
Field
EID
PID
GA.GB
X1.X2.X3
GO
PA.P9
W1A.W2A.W3A
W18,W2B,W3B
Contents
Unique element identification number (Integer > 0).
Identification number of a PBAR property entry (Default is EID unless BAROR entry
has nonzero entry in field 3) (Integer > 0 or blank *).
Grid point identification numbers of connection points (Integer > 0: GA * GB).
Components of vector v, at end A, (Figure 1(a) in Section 1.3) measured at end A,
parallel to the components of the displacement coordinate system for GA, to
determine (with the vector from end A to end 8) the orientation of the element
coordinate system for the BAR element (Real, 0 or blank").
Grid point identification number to optionally supply X1, X2, X3 (Integer > 0 or
blank"). Direction of orientation vector is GA to GO.
Pin flags for bar ends A and 3, respectively (up to 5 of the unique digits 1 - 6
anywhere in the field with no embedded blanks; Integer > 0). Used to remove
connections between the grid point and selected degrees of freedom of the bar.
The degrees of freedom are defined in the element's coordinate system (see Figure
1(a), Section 1.3). The bar must have stiffness associated with the PA and PB
degrees of freedom to be released by the pin flags. For example, if PA-4 is
specified, the PBAR entry must have a value for J, the torsional stiffness.
Components of offset vectors wa and wb, respectively (see Figure 1(a),Section 1.3). in displacement coordinate systems at points GA and GB, respectively(Real or blank).
"See the BAROR entry for default options for fields 3 and 5 - 8.
(Continued)
2.4-62(8/5/91)

CBAR
BULK DATA
CBAR (Com.)
Remarks:
1 . Element identification numbers must be unique with respect to all other element identification
numbers.
2. For an explanation of BAR element geometry, see Section 1.3.2.
3. If there are no pin flags or offsets, the continuation may be omitted.
4. The old CBAR entry used field 9 for a flag. F, which was used to specify the nature of fields
6-8 as follows:
FIELD 6 7 8
F-1
F-2
F-blank
X1
GO
X2
Blank
orO
X3
Blank
orO
Provided by BAROR card.
This data item is no longer required but may continue to be used if desired (see Remark 5). If
F-1 in field 9, a zero (0) in field 6. 7, or 8 will override entries on the BAROR entry but a blank
will not.
5. For the case where field 9 is blank and not provided by the BAROR entry, if X1 ,G0 is integer,
then GO is used: if X1 .GO is blank or real, then X1 , X2, X3 is used.
6. See Section 1 2.1 for a definition of coordinate system terminology.
2.4-63(8/5/91)

CELAS1
BULK DATA
Bulk Data Entry: CELAS1 - Scalar Spring Connection
Description: Defines a scalar spring element of the structural model
Format:
1 2 3 4 5 3 7 a 9 10
CELAS1 BD PID G1 C1 G2 C2
Example(s):
CELAS1 2 6 a 1
Field
EID
PID
G1.G2
C1.C2
Remarks:
Contents
Unique element identification number (Integer > 0)
Identification number of a PELAS property entry (Default is EJD) (Integer > 0)
Geometric grid point identification number (Integer 2 0)
Component number (6 5 Integer 2 0)
1 . Scalar points may be used for G1 and/or G2 in which case the corresponding C1 and/or C2
must be zero or blank. Zero or blank may be used to indicate a grounded terminal G1 or G2
wrth a corresponding blank or zero C1 or C2. A grounded terminal is a point whose displace
ment is constrained to zero. If only scalar points and/or ground are involved, it is more
efficient to use the CELAS3 entry.
2. Element identification numbers must be unique with respect to al[ other element identification
numbers.
3. The two connection points (G1, C1) and (G2, C2) must be distinct.
4. For a discussion of the scalar elements, see Section 1 .3.8.
5. A scalar point specified on this entry need not be defined on an SPOINT entry.
2.4-79 (8/5/91)

C0NM2
BULK DATA
Bulk Data Entry: C0NM2 - Concentrated Mass Element Connection, Rigid Body Form
Description: Defines a concentrated mass at a grid point of the structural model
Format:
2 3 4 5 6 71 3 10
CONM2 EID G CID M X1 X2 X3 blank
111 121 I22 131 I32 I33
Example(s):
CONM2 2 15 6 49.7
16.2 16.2 7.8
Field
EID
G
CID
M
X1.X2.X3
Contents
Element identification number (Integer > 0)
Grid point identification number (Integer > 0)
Coordinate system identification number (Integer z -1, default is 0). For CID of -1 see
X1 .X2.X3 below.
Mass value (Real)
Offset distances from the grid point to the center of gravity of the mass in the coordinate
system defined in field 4, unless CID - -1, in which case X1.X2.X3 are the coordinates.
not offsets, of the center of gravity of the mass in the basic coordinate system (Real).
Mass moments of inertia measured at the mass center of gravity in the coordinate system
defined by field 4 (Real 2 0). If CID - -1. the basic coordinate system is implied.
Remarks:
1 . Element identification numbers must be unique with respect to all other element identification
numbers.
2. For a more general means of defining concentrated mass at grid points, see CONM1 .
3. The continuation may be omitted.
(Continued)
2.4-111 (8/5/91)

C0NM2GENERAL DESCRIPTION OF INPUT DATA
CONM2 (Com.)
4. ff CID - -1, offsets are internally computed as the difference between the grid point location
and X1, X2, X3. The grid point locations may be defined In a nonbasic coordinate system. In
this case, the values of lij must be in a coordinate system that parallels the basic coordinate
system.
5. The form of the inertia matrix about its center of gravity is taken as:
M
M
M
SYM.
111
-121 I22
-131 -I32 I33
where M - JpdV
I11-Jp(xf +x)dV
122 - Jp(xf + x|)dV
I33- jp(:r? +xf)dV
121 - Jpx^dV
131 - Jpx, x3dV
I32 - Jpx2x3dV
and x, , x2, x3 are components of distance from the center of gravity in the coordinate system
defined in field 4. The negative signs for the off-diagonal terms are supplied by the program.
A warning message is issued if the inertia matrix is nonpositrve definite, as this may cause
fatal errors in dynamic analysis modules.
5. If CID 2 0, then X1, X2, and X3 are defined by a local Cartesian system, even if CID refer
ences a spherical or cylindrical coordinate system. (This is similar to the manner in which
displacement coordinate systems are defined.)
7. See Section 1 .2.1 for a definition of coordinate system terminology.
2.4-112(8/5/91)

CQUAD4
BULK DATA
Bulk Data Entry: CQUAD4 - Quadrilateral Element Connection
Description: Defines a quadrilateral plate element (QUAD4) of the structural model. This is an
isoparametric membrane-bending element
Format:
1 2 3 4 5 6 7 8 9 10
CQUAD4 EID PID G1 G2 G3 G4 THETA ZOFFS
T1 T2 T3 T4
Exampleis):
CQUAD4 111 203 31 74 75 32 2.6 0.3
1.77 2.04 2.09 1.80
Field Contents
EID Element identification number (Unique integer > 0)
PID Identification number of a PSHELL or PCOMP property entry (Imeger > 0 or blank,
default is EID)
G1 .G2.G3.G4 Grid point identification numbers of connection points (Integers > 0, all unique)
THETA Material property orientation specification (Real or blank: or 0 i imeger < 1,000,000).
If real or blank, specifies the material property orientation angle in degrees. If imeger,
the orientation of the material x-axis is along the projection onto the plane of the
element of the x-axis of the coordinate system specified by the imeger value. The
sketch below gives the sign convention for 8.
ZOFFS Offset from the surface of grid points to the element reference plane (see Remark 6)
(Real)
T1 ,T2,T3,T4Membrane thickness of element at grid points G1 through G4. (Real > 0. or blank, not
all zero. See Remark 4 for default.)
(Commued)
2.4-127 (8/5/91)

CQUAD4
GENERAL DESCRIPTION OF INPUT OATA
CQUAD4 (Com.)
y*T,
X/marm
Remarks:
1 . Element iderrtif ication numbers must be unique with respect to all_ other element identification
numbers.
2. Grid points G1 through G4 must be ordered consecutively around the perimeter of the
element.
3. All the interior angles must be less than 180*.
4. The continuation is optional. If 'rt is not supplied, then T1 through T4 will be set equal to the
value of T on the PSHELL data entry.
5. Stresses are output in the element coordinate system.
6. Elements may be offset from the connection points by means of ZOFFS. Other data, such as
material matrices and stress fiber locations, are given relative to the reference plane. A
positive value of ZOFFS implies that the element reference plane is offset a distance of
ZOFFS along the positive Z-axis of the element coordinate system.
The use of ZOFFS will cause incorrect results in buckling analysis and differential stiffness. If
the ZOFFS field is used, then th MIDI arid MID2 fields must be specified on the PSHELL entry
referenced by PID.
2.4-128(8/5/91)

DSCONS
GENERAL DESCRIPTION OF INPUT DATA
Bulk Data Entry: DSCONS - Design Constraint
Description: Defines a Design Constraint
Format:
12 3 4 5 10
DSCONS DSCID LABEL TYPE IO COMP LIMIT OPT LAMNO [N.C.]
Example(s):
DSCONS 21 G101DX DISP 4 1 .06 MAX 6
Field Contents
DSCID Design constraint identification number (imeger >0). Must be unique for all DSCONS.
LABEL Label used to describe constraint in output (Character)
TYPE Type of constraint:
DISP DISPLACEMENT
STRESS ELEMENT STRESS
FORCE ELEMENT FORCE
CSTR LAMINA STRESS in elements for composites
CFOR FAILURE INDEX for a lamina in element for composites
LAMA EIGENVALUE or BUCKLING LOAD FACTOR
FREQ FREQUENCY
ID Identification number of constraint, i.e., GRID ID, ELEMENT ID, or MOOE NUMBER
(Integer >0)
COMP Component/Item to be constrained (imeger 2 0)
For grid points, use 1, 2. 3, 4, 5 and 6; refer to TX, TY, TZ, RX, RY and RZ, respectively.
For scalar points, a value of 0. 1, or blank may be used.
For elements, refer to Section 4.3 for tables of element stress and force item codes.
For buckling and normal modes, COMP is not used.
LIMIT Value of limit (Real) (Default - 0.0)
(Continued)
2.4-212 (8/5/91)

DSCONS
BULK DATA
DSCONS (Com.)
OPT Constraint equation option (Character MAXorMIN). (Default is MAX.)
If OPT fc MAX then:
/constraint '
sign(LIMIT)) (VUMITxO)
V |lirrtf|
y - constraint (V LIMIT - 0)
If OPT ' MIN. then:
-(l."sign(LlMfT)-22!^pl)( LIMIT -0)
V - constraint ( UMIT - 0)
LAMNO Layer number in the laminale forwhich the constrairt is applicable (default is Lamina 1 .
Remarks:
1 DSCONS entries must be selected in by the SET2 Case Control command.
2. DSCONS is used only for design sensitivity and not for optimization.
2.4-213(8/5/91)

DVAR
GENERAL DESCRIPTION OF INPUT DATA
Bulk Data Entry: OVAR - Design Variable
Description: Defines a design variable for a design sensitivity analysis
Formal:
1 2 3 4 5 6 7
Field
BID
LABEL
DELTAB
VID
10
DVAR BID LABEL DELTAB VID VID VID VID VID
VID -etc.-
Example's):
DVAR 10 LFDOOR .01 2 4 5 6 9
10
Contents
Design variable identification number (Imeger > 0). Must be unique for all DVAR.
Label used to describe variable in output (Character)
The change B in the dimensionless design variable B to be used in the calculation of the
design sensitivity coefficients. (Real, default .02)
Identification number of DVSET entry(s).
Remark: DVAR entries must be selected in case control (SET2 includes BID).
2.4-232 (8/5/91)

DVSET
BULK DATA
Bufc Data Entry: DVSET - Design Variable Set Property
Description: Defines a set of element properties which vary in a fixed relation to a design variable
Format:
2 3 4 5 6 71 8 10
DVSET V10 TYPti FIELD PREF ALPHA PID1 P1D2 P1D3
P104 P106 -etc.-
Examplefs):
DVSET 21 PSHELL 4 .20 1. 99 101 110
111 122
Alternate Fomul and Exampie(s):
DVSET VID TYPE FIELD PREF ALPHA PIDTHRU-
PID2 [N.C.]
DVSET 21 PSHELL 4 .20 1. 101 THRU 105
DVSET VID TYPE FIELD MIDV PID1 PID2 PID3 [N.C.]
DVSET 21 PSHELL 3 134 87 101
Field Contents
VID Identification number (Integer > 0)
TYPE Type of element property entry, e.g., PSHELL (Character). (See Remark 8.)
PID Property entry identification number (Imeger > 0)
FIELD Word number on the element property entry to be varied. (Imeger > 2). Field number for the
Nth continuation property entries is 10 N + FL where FL is the local field number of the
continuation entry. (See Remark 6.)
PREF Reference value for element property (Real 0.0 or blank).
MIDV Matenal identification of material property after a design change of DELTAB (See DVAR
entry). Note FIELD must specify a material ID field on the property entry, (imeger > 0).
(Continued)
2.4-239(8/5/91)

DVSET
GENERAL DESCRIPTION OF INPUT DATA
DVSET (Com.)
ALPHA Exponent, alpha, of the actual element property versus the design variable (Real * 0.0)
(Default -1.0)
Remarks:
1. There it no restriction on the number of DVSET entries which may reference a given VID.
2. If PREF is blank, the corresponding value on the property entry w* be used. Nonbiank PREF
values are required when the basic property value is 0.0.
3. The form of PREF is
P-Po+Pr*-(B-n'-1.0)
4. The form of MIDV is
M - Mq * (MIDV - Mo)/DELTAS .("- 1.0)
5. MIDV material states correspond to a design variable at B - (1 . + AB).
6. For the BEAM and BEND elements, FIELD s a negative imeger and corresponds to the
WORD number in the EPT section of the EST table (as described in Section 1.15) preceded
by a minus sign.
7. DVSET entries are selected by DVAR Bute Data entries.
8. Since this entry references only property entries ("Pxxx"), this implies that only elements with
property entries may be used as design variables. This excludes elements such as
CONRODs and CCNM2s. However, these elements may be designated as design constraints
if they have force or stress output.
2.4-240 (8/5/91)

BULK DATA
EIGR
Bulk Data Entry: EIGR - Real Eigenvalue Extraction Data
Description: Defines data needed to perform real eigenvalue analysis
Format:
1 2 3 4 5 6 7
Field
SID
METHOD
10
EIGR SID METHOD FI F2 NE NO
NORM G C
Examplefs):
EIGR 13 SINV 1J 15.6 12
POINT 32 4
Contents
Set Identification number (Unique integer > 0)
Method of eigenvalue extraction (Character)
INV - Inverse power method
SINV - Inverse power method with enhancements
GIV - Givers method of trkfiagonalization
MGIV - Modified Givers method
HOU - Householder method of tridiagonalization
MHOU - Modified Householder method
AGIV - Automatic selection of METHOD - GIV or MGIV. (See Remark 15)
AHOU - Automatic selection of METHOD - HOU or MHOU. (See Remark 15)
(Continued)
2.4-257(8/5/91)

EIGR
GENERAL DESCRIPTION OF INPUT DATA
EIGR (Com.)
F1.F2
NE
ND
When METHOD - INV or SINV When METHOD - GIV. MGIV, HOU or MHOU
Frequency range of interest (Real 2
0.0). F1 must be Input If METHOD -
SINV and ND. is blank, then F2 must
be input
Frequency range of interest (Real 2 0.0; F1 <
F2). if ND Is not blank. FI and F2 are ignored.
If NO is blank, eigenvectors are found whose
natural frequencies lie in the range between F1
andF2.
Estimate of number of roots in range
(Required for METHOD - "INV)(imeger > 0). Not used by SINV
method.
Not used
Desired number of roots (Default is
3*NE. INV only) (imeger > 0). If this
field is blank and METHOD - SINV.
then all roots between F1 and F2 are
searched and the limit is 600 roots.
Desired number of eigenvectors (Imeger 2 0). If
ND is zero, the number of eigenvectors is
determined from F1 and F2 (Default - 0). If all
three are blank, then ND s automatically set to
one more than the number of degrees of
freedom listed on SUPORT entries.
NORM Method for normalizing eigenvectors (Character"MASS," "MAX."
or "POINT")
MASS - Normalize to unit value of the generalized mass (Default)
MAX - Normaize to unit value of the largest component in the analysis set
POINT - Normafize to a positive or negative unit value of the component defined in fields
3 and 4 (defaults to"MAX"
if defined component is zero)
G Grid or scalar point identification number (Required only if NORM - "POINT) (Imeger > 0)
C Component number (One of the integers 1-6) (Required only if NORM -"POINT"
and G is
a geometric gnd point)
Remarks:
1. See Section 4.2.4 of the MSC/NASTRAN Handbook for Dynamic Analysis for a discussion of
method selection.
2. Real eigenvalue extraction data sets must be selected in the Case Control Section (METHOD
- SID) to be used by MSC/NASTRAN.
(Continued)
2.4-258 (8/5/91)

EIGR
BULK DATA
EIGR (Com.)
3. The units of F1 and F2 are cydes per unit time.
4. The continuation is not required. Mass normalization is then used.
5. If METHOO - "GJV or "MGIV*. all eigenvalues are found.
6. If METHOO - 'GIV, the mass matrix for the analysis set must be costive definite. The
auto-omit feature removes massiess degrees of freedom. Singularities or near-singularities of
the mechanism type in the mass matrix win produce poor numerical stabfflty for the GIV
method The MGIV method should be used for this condition.
7. MGIV is a modified form of the GIV method that allows a non-positive definae mass matrix for
the analysis set (I.e., massiess degrees of freedom may exist in the analysis set). The MGIV
method should give improved accuracy for the lowest frequency solutions.
8. If NORM - MAX, components that are not in the analysis set may have values larger than
unity.
9. If NORM - POINT, the selected component should be in the analysis set. (The program uses
NORM - MAX when it is not in the analysis set) The displacement value at the selected
component win be positive or negative unity.
10. The desired number of roots (ND) includes ail roots previously found, such as rigid bodymodes determined with the use of the SUPORT entry, or the number of roots found on the
previous run when restarting and APPENDing the eigenvector file.
1 1 . The SINV method is an enhanced version of the INV method. It uses Sturm sequence number
techniques to make it more Ikety that at roots in the range have been found. It is generally
more reliable and more efficient than the INV method.
12. For the INV and SINV methods, convergence is achieved at ^Cri. For the other methods
convergence is not tested.
13. For the SINV method only, if F2 is blank, the first shift will be made at F1, and onry one
eigensolution above F1 will be calculated. If there are no modes below F1. it is likely that the
first mode will be calculated. If there are modes below F1 (including rigid body modes defined
by SUPORT entries), a mode higher than the first mode above F1 may be calculated.
14. The HOU and MHOU methods are generally faster on machines with vector processors.
15. If METHOD - AGIV or AHOU, the program automatically determines the need for a modified
method (MGIV or MHOU) and makes the proper selection.
2.4-259 (8/5/91)

EIGRL
GENERAL DESCRIPTION OF INPUT DATA
Bulk Data Entry: EIGRL - Real Eigenvalue Extraction Data. Lanczos Method
Description: Defines data needed to perform real eigenvalue (vibration or buckling analysis) with the
Lanczos Method.
Format:
1 10
EIGRL SID V1 V2 ND MSGLVL MAXSET SHFSCL
Examplefs):
EIGRL 1 0.1 3.2 10
Field
SID
V1, V2
ND
MSGLVL
MAXSET
SHFSCL
Contents
Set Identification number (Unique imeger > 0)
Vbratton analysis: Frequency range of interest Buckling analysis: eigenvalue range of
interest (V1 < V2. Real or blank). (See Remark 4.)
Number of roots desired (imeger > 0 or blank). (See Remark 4.)
Diagnostic level (Integer 0 through 3) (Default 1)
Number of vectors in block or set (imeger 1 through 15) (Default 7).
Estimate of the first flexible mode natural frequency (Real or blank). (See Remark 1 1.)
Remarks:
1 . Real eigenvalue extraction data sets must be selected in the Case Control Section (METHOD
- SID) to be used by MSC/NASTRAN.
2. The units of V1 and V2 are cycles per unit time in vibration analysis and eigenvalues in
buckling analysis.
3. Normalization s always"MASS"
type for vibration analysis, and"MAX"
for buckling. See the
NORM field description on the EIGR entry.
(Continued)
2.4-260(8/5/91)

EIGRL
BULK DATA
EIGRL (Cont)
4. The roots are found In order of Increasing magnitude: that is. those closest to zero are found
first. The number and type of roots to be found can be determined from the following table,
where"-"
denotes a blank input field.
Cass V1 V2 NO Number and Type of Roots Found
1 V1 V2 NO Lowest NO or al in range;
whichever is smaller.
2 V1 V2 - An in range
3 V1 - NO Lowest ND in range [V1, + ]
4 V1 - - Lowest root in range fV1, + -)
5 - - ND Lowest ND roots in[ ,+ ]
6 - - - Lowest root See Remark 12.
7 - V2 ND Lowest ND roots below V2
8 - V2 - All below V2
5. In vibration analysis, if V1 < 0.0, the negative eigenvalue range will be searched. (Eigen
values are proportional to V, squared, therefore the negative sign would be lost.) This is a
means for diagnosing improbable models. In buckling analysis, negative V1 and/or V2 require
no special logic.
6. Eigenvalues are sorted on order of magnitude for output. An eigenvector is found for each
eigenvalue.
7. MSGLVL is used to control the amount of diagnostic output. A value of zero (or blank) will
result in no output, with values of 1 , 2. or 3 resulting in increasing levels of diagnostic output.
The default value is recommended.
8. MAXSET is used to limit the maximum block size. It is otherwise set by the region size or byND with a maximum size of 15. It may also be reset if there is insufficient memory available.
The default value is recommended.
9. In vibration analysis, if V1 is blank, all roots less than zero are calculated. Small negative
roots are usually computational zeroes which indicate rigid body modes. Finite negative roots
are an indication of modeling problems. If VI is set to zero explicitly, negative eigenvalues are
not calculated.
(Continued)
2.4-261 (375/91)

EIGRL
GENERAL DESCRIPTION OF INPUT DATA
EIGRL (Com.)
10. For SOLs 3, 25, 29, 30. 31, and 48 It Is necessary to use RFALTER RFXXD33 where XX is
the Solution Sequence number (see Section 3.5). This capability is built into ail other solution
sequences.
11. A specification for SHFSCL may Improve performance especially when large mass techniques
are used In enforced motion analysis, which can cause a large gap between the rigid body and
flexbie frequencies. If this field is blank, the program automatically estimates a value for
SHFSCL.
12. On occasion. It may be necessary to compute more roots than requested, to ensure that ail in
the range have been found. In this case, all roots and eigenvectors which pass the conver
gence checks are output. This Is usually equal to or less than an Imeger multiple of MAXSET.
13. NASTRAN SYSTEM(146) provides options for reducing scratch space and I/O (in sparse
method only):
SYSTEM(146) Description
0
1
2
3
4
Default
Reduce scratch space usage 67%, CPU cost will increase.
Increase memory reserved for sparse method by 100%
Increase memory reserved for sparse method by 400%
Increase memory reserved for sparse method by 500%
Values 2, 3, and 4 reduce I/O for the sparse method only.
2.4-262 (8/5/91)

GRID
GENERAL DESCRIPTION OF INPUT DATA
Bulk Data Entry: GRID - Grid Point
Description: Defines the location of a geometric grid point of the structural or fluid model, the directions
of its displacement, and Its permanent single-point constraints
Format:
1 2 3 4 5 6 7 8 9 10
GRID ID CP X1 X2 X3 CO PS SEIO
Example(s):
GRID 2 3 1.0 -2.0 3.0 316
Field
ID
CP
X1.X2.X3
CD
PS
SEID
Remarks:
Contents
Grid point identification number (1,000,000 > Imeger > 0)
Identification number of coordinate system in which the location of the grid point is defined
(imeger 2 0)
Location of the grid point in coordinate system CP (Real)
Identification number of coordinate system in which the displacements, degrees of
freedom, constraints, and solution vectors are defined at grid point (Imeger 2 -1 or blank")
Permanent single-point constraints associated with grid point (any of the digits 1 -6 with no
imbedded blanks) (Integer 2 0 or blank*)
Superelemem identification number (Imeger 2 0 or blank)
1. All grid point identification numbers must be unique with respect to all other structural, scalar
and fluid points.
2. The meaning of X1, X2 and X3 depends on the type of coordinate system CP as follows: (see
CORDi entry descriptions)
'Sea the GRDSET entry for default options for fields 3, 7 and 3.
(Continued)
2.4-288 (8/5/91)

BULK DATA
GRID (Com.)
Type X1 X2 X3
Rectangular X Y Z
Cylindrical R e(degrees) Z
Spherical R 8<degrees) ?(degrees)
GRID
See Section 1 .2.1 for a definition of coordinate system terminology.
3. The collection of all CO coordinate systems defined on all GRID entries is called the global
coordinate system. All degrees of freedom, constraints, and solution vectors are expressed in
the global coordinate system.
4. The SEID entry can be overridden by use of the SESET Bulk Data entry.
5. If CD - -1, then this defines a fluid grid point in coupled fluid-structural analysis (see
Section 1.16). This type of point may onfy connect the CHEXA, CPENTA and CTETRA
elements to define fluid elements.
2.4-289 (8/5/91)

MAT1
BULK DATA
Bulk Data Entry: MAT1 - Material Property Definition, Form 1
Descnptlon: Defines the material properties for linear, temperature-independent. Isotropic materials
Format:
1 2 3 4 5 6 7 8 10
MAT1 MIO E G NU RHO A TREF GE
ST SC SS MCSIO
Examplefa):
MAT1 17 3.+7 0.33 428 6.5-6 5.37+2 0.23
20.+4 15.-H4 12.+4 1003
Field
MIO
E
G
NU
RHO
A
TREF
GE
ST.SCSS
MCSID
Comet its
Material identification number (Imeger > 0)
Young's modulus (Real or blank)
Shear modulus (Real or blank)
Poisson's ratio (-1 .0 < Real < 0.5 or blank)
Mass density (Real)
Thermal expansion coefficient (Real)
Reference temperature for the calculation of: (1) thermal loads, or (2) a temperature-
dependent thermal expansion coefficient (Real or blank; default - 0.0 rf A is specified)
(See Remarks 12 and 13).
Structural element damping coefficient (Real) (See Remark 1 2)
Stress limits for tension, compression, and shear (Real). (Used only to compute margins
of safety in certain elements: they have no effect on the computationai procedures.) See
Sections 1.3.2 and 1.3.3.
Material coordinate system identification number (used only for CURV module processing)(Integer >0 or blank)
(Continued)
2.4-323(8/5/91)

MAT1
GENERAL DESCRIPTION OF INPUT DATA
MAT1 (Cont)
Remarks:
1. The material Identification number must be unique for all MAT1, MAT2, MAT3 and MAT9
entries.
2. MAT1 materials may be made temperature dependent by use of the MATT1 entry. In SOLu-
tion 66 and 106. shear and nonlinear elastic material properties In the residual structure will be
updated as prescribed under the TEMPERATURE Case Control command.
3. The mass density RHO will be used to automatically compute mass for an structural elements.
4. Weight density may be used in field 6 If the value 1/g is entered on the PARAM entry
WTMASS. where g is the acceleration of gravity (see Section 3.1 5).
5. MCSIO must be nonzero if the CURV module is used to calculate stresses or strains at grid
points on plate and shell elements only.
6. To obtain the damping coefficient GE. muttlpty the critical damping ratio G/C,, by 2.0.
7. Either E or G must be specified (i.e., nonblank).
8. If any one of E. G, or NU Is blank; it will be computed to satisfy the identity E - 2(1+NU)G.
Otherwise, values supplied by the user will be used. If any are temperature-dependent, then
this calculation is oniy made for initial values of E, G, and NU. See remarks under MATT1
entry description.
9. If E and NU or G and NU are both blank, they will both be given the value 0.0.
10. Implausible data on one or more MAT1 entries will result in a warning message. Implausible
data is defined as any of E < 0.0 or G < 0.0 or NU > 0.5 or NU < 0.0 or 1 - - > 0.01
(except for cases covered by Remark 9).
11. if al[ of the values of E. G. and NU are specified: then it should be noted that some of them are
not used in the stiffness formulation of certain elements. The table below indicates by element
type how these values are used. Therefore, it is strongly recommended that only two of the
values be specified on the MAT1 entry. If aH three are desired, then the MAT2 entry is
recommended.
(Continued)
2.4-324(8/5/91)

MAT1
BULK DATA
MAT1 (Com.)
Element
Type E NU G
ROD
BEAM
BAR
Extension and
BendingNot Used
Torsion
Transverse Shear
OUADI
TRIAi
CONEAX
Membrane and Bending Transverse Shear
SHEAR Not Used Shear
CRAC2D All Terms Not Used
HEXA
PENTA
TETRA
CRAC3D
All Terms Not Used
TRIAX6Radial, Axial,
CircumferentialAll Coupled Ratios Shear
12. TREF and GE are ignored if this entry is referenced by a PCOMP entry.
13. TREF is used for two different purposes:
a. In nonlinear static analysis (SOLs 66 and 106), it is used only for the calculation of a
temperature-dependent thermal expansion coefficient. (The reference temperature for the
calculation of thermal loads is obtained from the TEMPERATURE(INtTlAL) set selection.)See below.
(Continued)
Z4-325 (8/5/91)

MAT1
GENERAL DESCRIPTION OF INPUT DATA
MAT1 (Cont)
TREF T0 T
ET - A(T) (T - TREF) - A(T0) (T, - TREF)
where T is requested by the TEMPERATURE(LOAD) command and T is requested by
the TEMPERATURE(INITIAL) command.
Note: 1 . A is a secant quantity.
2. TREF is obtained from the same source as the other material properties: e.g.,
ASTM, etc.
3. rf A(T) - constant, then 6t - A (T - T0).
b. In all SOLutions except 66 and 106, it is used only as the reference temperature for the
calculation of thermal loads. (TEMPERATURE (INITIAL) may be used for this purpose,
but then TREF must be blank.)
2.4-326(8/5/91)

MAT1
BULK DATA
MAT1 (Com.)
Element
Type E NU G
ROD
BEAM
BAR
Extension and
BendingNot Used
Torsion
Transverse Shear
QUADI
TRIAi
CONEAX
Membrane and Bending Transverse Shear
SHEAR Not Used Shear
CRAC2D All Terms Not Used
HEXA
PENTA
TETRA
CRAC3D
All Terms Not Used
TRIAX6Radial, Axial,
CircumferentialAll Coupled Ratios Shear
12. TREF and GE are ignored if this entry is referenced by a PCOMP entry.
13. TREF is used for two different purposes:
a. In nonlinear static analysis (SOLs 66 and 106), It s used only for the calculation of a
temperature-dependent thermal expansion coefficient. (The reference temperature for the
calculation of thermal loads is obtained from the TEMPERATURE(INrTIAL) set selection.)See below.
(Continued)
2.4-325 (8/5/91)

PBAR
GENERAL DESCRIPTION OF INPUT DATA
Bulk Data Entry: PBAR - Simple Beam Property
Description: Defines the properties of a simple beam (bar) which is used to create bar elements via the
CBAR entry
Format:
Field
PID
MID
A
11,12, 112
J
NSM
K1.K2
Remarks:
1 2 3 4 5 6 7 a 9 10 .
PBAR PID MIO A 11 12 J NSM blank
C1 C2 01 D2 E1 E2 F1 F2
K1 K2 112
Example(s):
PBAR 39 6 23 5.97
2.0 4.0
Contents
Property identification number (Imeger > 0)
Material identification number (Imeger > 0)
Area of bar cross section (Real)
Area moments of Inertia (Real) (l, 2 0., I2 2 0., U l2 > l?2)
Torsional constant (Real)
Nonstructural mass per unit length (Real)
Area factor for shear (Real)
Ci.Di.Ei.Fi Stress recovery coefficients (Real)
1 . For structural problems, PBAR entries may only reference MAT1 material entries.
2. See Section 1 .3.2 for a discussion of bar element geometry.
3. For heat transfer problems, PBAR entries may only reference MAT4 or MAT5 material entries.
(Continued)
2.4-404 (8/5/91)

PBAR
BULK DATA
PBAR (Com.)
4. The transverse shear stiffnesses in planes 1 and 2 are (K1)AG and (K2)AG. respectively. The
default values for K1 and K2 are infinite; in other words, the transverse shear flexibilities are
set equal to zero. K1 and K2 are ignored if 112 0.
5. The stress recovery coefficients C1 and C2. etc., are the y and z coordinates In the BAR
element coordinate system of a point at which stresses are computed. Stresses are computed
at both ends of the BAR.
6. For response spectra analysis on stress recovery coefficients, the BEAM element should be
used because results will be inaccurate for the BAR element
2.4-405 (8/5/91)

PELAS
BULK DATA
Bulk Data Entry: PELAS - Scalar Baatic Property
Description: Used to define the stiffness, damping coefficient, and stress coefficient of a scalar elastic
element (spring) by means of the CELAS1 or CELAS3 entry
Format:
1 2 3 4 5 8 7 8 9 10
PELAS PID K GE S PIO K G S
Example^):
PELAS 7 4.29 0.06 7.92 27 2.17 0.0032
Field Contents
PID Property identification number (Integer > 0)
K Elastic property value (Real)
GE Damping coefficient g, (Real)
S Stress coefficient (Real)
Remarks:
1 . The user is cautioned to be careful using negative spring values. (Values are defined directlyon some of the CELASi entry types.)
2. One or two elastic spring properties may be defined on a single entry.
3. For a discussion of scalar elements, see Section 5.6 of The MSCNASTRAN Theoretical
Manual.
2.4-427(8/5/91)

PSHELL
BULK DATA
Bulk Data Entry: PSHELL - SheB Element Property
Description: Defines the membrane, bending, transverse shear, and coupling properties of thin shell
elements
Foimal*
1 10
PSHELL PID MJ01 T MI02 12TO MID3 TS/T NSM
Z1 22 MI04
Example<s):
PSHELL 203 204 1.90 205 12 206 0.8 6.32
+.95 -.95 ',
Reid Contents
PID Property identification number (imeger > 0)
MIDI Material identification number for the membrane (imager > -1 or blank)
T Default value for the membrane thickness (Real)
MID2 Material Identification number for bending (Integer 2 -1 or blank)
12I/T3 Bending stiffness parameter (Real >0J) orWank, default - 1.0)
MID3 Material identification number for transverse shear (imeger > 0 or blank, must be blank unless
MID2 > 0)
TS/T Transverse shear thickness divided by the membrane thickness (Real > 0.0 or blank, default
.333333)
NSM Nonstructural mass per unit area (Real)
Z122 Fiber distances for stress computation. The positive direction is determined by the righthand
rule and the order in which the grid points are listed on the connection entry (Real or blank).
(See Remark 1 1 for defaults.)
MID4 Material identification number for membrane-benolng coupling (imeger > 0 or blank, must be
blank unless MIDI > 0 and MID2 > 0. may not equal MIDI or MID2). (See Remarks 6 and 13.)
(Continued)
2.4-467(8/5/91)

PSHELL
GENERAL DESCRIPTION OF INPUT DATA
PSHELL (Com.)
Remarks:
1 . AH PSHELL property entries must have unique Identification numbers.
2. The structural mass is computed from the density using the membrane thickness and
membrane material properties.
3. The resuts of leaving an MIO fieldWank (orMID2--1) are:
MIDI No merrtiram or coupfing stiffness
MID2 No bending, coupling, or transverse shear stiffness
MID3 No transverse shear flexfaimy
MI04 No benrjng-membrane coupling unless ZOFFS is
specified on the connection entry. See Remark 6.
Note: MI01 and MID2 must be specified I the ZOFFS field is also specified on the connec
tion entry.
4. The continuation is not required.
5. The structural damping (for dynamics solution sequences) uses the values defined for the
MIDI material.
6. The MID4 field should be left blank if the material properties are symmetric with respect to the
middle surface of the shell, if the element centertine is offset from the plane of the grid points
but the material properties are symmetric, the preferred method for modeling the offset is byuse of the ZOFFS field on the connection entry. Although the MI04 field may be used for this
purpose, it may produce it-conditioned stiffness matrices ("negative terms on factor diagonal")if done incorrectly.
Only one of the options MID4 or ZOFFS may be used: and if either option is used, positive
imeger values must be entered for both MIDI and MID2. Note that the mass properties are
not modified to reflect the existence of the offset when the ZOFFS and MID4 methods are
used. If the weight or mass properties of an offset plate are to be used in an analysis, the
RBAR method must be used to represent the offset See Section 1 .3.5.
7. This entry is referenced by the CTRIA3, CTRIA6, CTRIAR, CQUAD4, CQUAD8, and CQUADR
entries via PID.
8. For structural problems. PSHELL entries may reference MAT1, MAT2, or MATS material
property entries.
9. If the transverse shear material MID3 references a MAT2 entry, then G33 must be zero. If
MID3 references a MAT8 entry; then G1,Z and G2.Z must not be zero.
(Continued)
2.4-468 (8/5/91)

PSHELL
BULK DATA
PSHELL (Com.)
10. For heat transfer problems, PSHELL entries may reference MAT4 or MATS material property
entries.
11. The defauB for Z1 is -T/2. and for Z2 Is +T/Z T is the local plate thickness defined either by T
on this entry or by membrane thicknesses at connected grid points, I they are input on
connection entries.
12. Forpiane strain analysis, set MID2--1; and set MIDI to reference a MAT1 entry.
13. For the QUAOR and TRIAR elements, the MID4 field should be left blank because their
formulation does not include membrane-bending coupling.
14. if the MIDI fields are greater than or equal to 10*. then parameter NOCOMPS is set to +1
indicating that composite stress data recovery is desired. (MIOi fields greater than 10*are
produced by PCOMP entries.)
15. For a material nonlinear property, MIDI must reference a MATS1 entry and be the same as
MID2. unless a plane strain (MI02 - -1) formulation is desired.
2.4-469(8/5/91)

MATPRN
DMAP MODULE AND STATEMENT DESCRIPTIONS
DMAP Statement: MATPRN - General Matrix Primer
Description: Prims general matrix data blocks.
Format:
MATPRN M1,M2,M3,M4,M5//$
Descnbera:
Mi Matrix data blocks, any of which may be purged
Output: The nonzero band of each coajmn of each input matrix data block is printed (see Remark 4).
Remarks:
1. Any or afl input data blocks may be purged.
2. If any data block is not a matrix, I win be printed as if Kwere a table.
3. MATPRN prints the row Index for the termwhich begins each Bne of printout
4. MATPRN wffl not prim out two or more consecutive lines of zeroes, but Instead will issue a
message of the form:
ROW POSITIONS xxxx THRU yyyy NOT PRINTED - ALL - 0.0.
5. If DIAG 30 is set by the PARAM module or DIAGON function before MATPRN (see Example 3),
and turned off after MATPRN, most of the digits of the internal representations will be primed.
Normally, the output is truncated to five or six digits.
6. For large, sparse matrices with scattered terms, the user is advised to use either the MATPRT
or MATGPR modules.
Examplefs):
1. MATPRN KGG//S
2. MATPRN KGG.PUPG.BGG.UPV// $
3. DIAGON(30) $ PRINT EXTENDED PRECISION
MATPRN KGG// $
DIAGOFF(30) $
5.4-141 (8/5/91)

0UTPUT2
OMAP MODULE AND STATEMENT DESCRIPTIONS
DMAP Statement: OUTPUT2 - Output an MSC/NASTRAN Table or Matrix onto a FORTRAN Readable
File
Description: To write an MSC/NASTRAN table or matrix onto a binary die for user postprocessing or for
subsequent input (via INPUTT2) into another MSC/NASTRAN run.
Format:
OUTPUT2 DB1.DB2,DB3.DB4.DB5//rrAPE/IUNIT/UVBUMAXR$
Describers:
DBi Any data block (table or matrix) name to be output. Any or aH of the Input data blocks may
be purged.
ITAPE Input-integer-defauB - 0. (TAPE is used to select the file positioning option as follows:
+n Skip forward n data blocks before writing (onty used if file has no label).
0 Data blocks are written starting at the current position. If this is the first use, no label is
written.
-1 Rewind before writing and label file.
-3 Rewind tape, print data block names and then write after the last data block on the tape
(file must have a label).
-9 Write a final EOF on the tape (must be used before -3 option and as last I/O use of unit).
IUNIT Input-integer-default - 0. IUNIT is the FORTRAN unit number on which the data blocks are
to be written. See Remark 7.
LABL Input-BCD-default - XXXXXXXX. LABL is used for file identification by MSC/NASTRAN.
The label is written only if (TAPE - -1 and is checked only if ITAPE - -3.
MAXR Input-integer-default - 2*BUFFS1ZE. Maximum physical record size.
Remarks:
1 . A data block (table or matrix) consists of logical records:
a. In matrices, each column is contained in one logical record. Each record begins with the
row position of the first nonzero term in the column followed by the first through the last
nonzero term in the column.
b. In tables, the contents of logical records vary according to the table but are described in
Section 2 of the MSC/NASTRANProgrammer'sManual.
(Continued)
5.4-157(8/5/91)

0UTPUT2
DIRECT MATRIX ABSTRACTION
OUTPUT2 (Com.)
2. The FORTRAN binary file consists of physical records of data from the data block and KEYs
which are provided to assist in the reading of the file. Each physical record of data is sepa
rated by one-word records called KEYs. The KEYs win Indicate one of the following depend
ing on its location in the binary file:
KEY Description
>0 The length of the next physical record It may also indicate the start of a new
logical record.
0 End-of-File (data block) (EOF) or End-of-Data (EOD)
<0 End-of-Logcai record (EOR) or a null column. The absolute value indicates the
logical record number.
3. The End-of-Data (EOD) follows the last end-of-file (data block) written to the binary file.
4. If possfcle. each logical record of the data block will be written to one physical record of the
FORTRAN binary file. However, the length of a logical record may exceed the maximum
length of a physical record (see MAXR parameter). If this occurs, then the logical record will
span more than one physical record. In other words, the logical record win be written to the
first physical record followed by a positive KEY record, which indicates a continuation of the
logical record and the length of the subsequent second physical record.
5. The OUTPUT4 module performs similar operations on matrices, but not tables. It is simpler to
use, and is the recommended method for matrix output.
6. Tables and matrices may be processed as sequential data blocks.
7. The ASSIGN FMS statement is recommended for assigning the FORTRAN unit (see
Section 2.2). Selection of a proper value for IUNIT is machine dependent. Section 7.6.2.2 of
the MSC/NSTRANApplication Manual.
3. No physical record will exceed the value specified by the parameter MAXR whose default is
two times BUFFSIZE words. Furthermore, the value specified for MAXR should not exceed
the maximum allowable record size for the receiving disk device. See Section 7.6 of the
MSC/NASTRANApplicationManual totQ\e maximum allowable values.
(Continued)
5.4-158 (8/5/91)

0UTPUT2
DMAP MOOULE AND STATEMENT DESCRIPTIONS
ouTPLrre (Com.)
9. The following describes each physical record.
Format for Labels (written only K (TAPE -1)
Physical
Record
Number Length Contents Description
1
2
3
4
5
6
7
1
KEY
1
KEY
1
KEY
1
KEY -3
Date (3 words, rronth-day-year) integer
KEY -7
NASTRAN Header (7 words*. BCD-A4)KEY -2
LABEL (2 words, BCD-A4 - LABL)KEY - -1 (EOR)
One Logical Record
3 1 KEY - 0 (EOF) End of Label
Format for Tables and Matrices
Physical
Record
Number Length Contents Description
9
10
11
1
KEY
1
KEY -2
Data Block Name (2words. BCD-A4)KEY - -1 (EOR)
Header Logical Record 1
of Data Block
12
13
14
1
KEY
1
KEY -7
NASTRAN Trailer (7 words, imeger)KEY - -2 (EOR)
Trailer Logical Record
2 of Data Slock
15
16
17"
18
19
1
KEY
1
KEY
1
KEY - 1 (Start new logical record)
Loaical Record Type"
2 !or taD,e.w TH* 0 for matrix column
KEY 2 2
Data Block Name (2 words, BCD-A4) and
data (if any)
KEY - -3 (EOR)
Logical Record 3 of Data
Block
20
21
1
KEY
KEY - 1 (Start new logical record)- 0 for table
Next Logical Record Type * 0 for matrixcolumn
Logical Record 4 of Table
Word 1 - NAST. Word 2 - RAN*. Word 3 - FORT. Word 4 . .TAP.
Word 5 - EJD. Word 8 - COD, Word 7 . E-
(Continued)
5.4-159 (8/5/91)

0UTPUT2
DIRECT MATRIX ABSTRACTION
OUTPUT2 (Com.)
Format for Tables (If logical record type - 0; I.e., data block is a table)
Physical
Record
Number Length Contents Description
22
23
24
1
KEY
1
KEY>0
Data
KEY < 0(EOR)**
Logical Record 4 of Table
(continued)
25
26
27
28
29
1
KEY
1
KEY
1
KEY - 1 (Start new logical record)
Next Logical Record Type - 0
KEY>0
Data
KEY < 0(EOR)**
Logical Record 5 of Table
Repeat Physical Records 25-29 for .
Additional Records in Tabic
n-7
n-6
n-5
n-4
n-3
1
KEY
1
KEY
1
KEY - 1 (Start new logical record)
Next Logical Record Type 0
KEY>0
Data
KEY < 0(EOR)**
Last Logical Record of
Table
n-2
n-1
n
1
KEY
1
KEY - 1 (Start new logical record)
Next Logical Record Type 0
KEY - 0 (EOR
if Last "Next Logical
RecordType"
- 0,End-of-Table
'If mors data exists for the column or logical record, then KEY > 0 and physical records 22. 23, and 24 will be
repeated as many times as necessary to complete the column or logical record.
(Continued)
5.4-160(8/5/91)

0UTPUT2
DMAP MODULE ANO STATEMENT DESCRIPTIONS
OUTPUT2 (Com.)
Format forMatrices (H record type * 0, i.e., data block Is a matrix)
Physical
Record
Number Length Contents Description
22
23
24
1
KEY+1
1
KEY > 0 (If <0. the column is null)Row PostJon of First Nonzero Term and Data
KEY < 0(EOR)**
first Column of Matrix
25
26
27
28
29
1
KEY
1
KEY+1
1
KEY - 1 (Start new column)
Column Number
KEY > 0 (If <0, the column is ruff)
Row PostJon of First Nonzero Term and Data
KEY < 0(EOR)**
Second Column of Matrix
Repeat Physical "ecords 25-29 for
Additional Columns in Matrix
n-7
n-6
n-5
n-4
n-3
1
KEY
1
KEY
1
KEY - 1 (Start new column)Column Number
KEY > 0 (If <0, the column is null)Row Position of FirstNonzero Term and Data
KEY < 0(EOR)**
Last Column of Matrix
n-2
n-1
n
1
KEY
1
KEY - 1 (Start new column)
Column Number
KEY - 0 (EOF)
If Column Number - 0
End of Matrix
If Additional Tables orMatrices Follow.the Above Formats are Repeated Begin
ning with Physical Record 9.
Format for End-of-Data (Tables and Matrices)
Physical
Record
Number Length Contents Description
n+1 1 If No Data Blocks Follow. KEY - 0 (EOD) End-of-Data
*tf mors data exists for the column or logical record, then KEY > 0 and physical records 22, 23, and 24 will be
repeated as many times as necessary to complete the column or logical record.
(Cominued)
5.4-161 (8/5/91)

0UTPUT2
DIRECT MATRIX ABSTRACTION
OUTPUT2 (Com.)
Example(s):
To process a table, the programmer calls three service routines:
IOPEN Ones per FORTRAN unt
IHEADR Once per data block
IREAO As many times as desired
These routines are available in a FORTRAN program called INPT2 which is delivered as part of the
MSC/NASTRAN utility programs: see Section 7.6.6 of the MSC/NASTRANApplication Manual. These
routines are coded in machine-independent FORTRAN.
Major benefits which result in using this standard interface are:
1. Easier initial usage of OUTPUT2. Most users make several errors while becoming familiar
with the formats.
2. User code is not burdened/concerned with physical record boundaries.
3. Data can be processed In logical groups rather than in a"blast"
read mode.
Major Limitations include:
1 . Matrices cannot be processed in this manner.
2. Multiple FORTRAN unit cannot be simultaneously processed.
3. BACKSPACE operations are not legal.
Entry Point: IOPEN
Description: To initialize an OUTPUT2 file and read the label (MSC/NASTRAN)
Format: CALL lOPEN(IUN.L)
where IUN - An input imegerwhich specifies the unit number to be read
L - An output two-word array (2A4) containing the label written on the unit (L comes from the
third parameter in the DMAP call).
Method: IOPEN rewinds IUN and reads in the data, title, and label. The keys are checked. A key checkfailure results in the message IOPEN BAD KEYX - XXXX.
(Continued)
5.4-162(8/5791)

0UTPUT2
DMAP MODULE AND STATEMENT DESCRIPTIONS
0UTPUT2 (Com.)
Entry Point: IHEAOR
Description: To process the data block name and trailer
Format: CALL IHEAOR(IUN.NAM,T)
where IUN - As described m IOPEN.
NAM - An output two-word array (2A4) containing the data block trailer in words two through
seven. Word one contains the location in the DMAP call (101, 102, etc)
Method: IHEAOR reads the name and trafler. It checks KEY lengths. It also skips the data block header
(which unfortunately may contain data for some/few data blocks). IHEAOR must be called for each data
block either immediately after IOPEN or after IREAD signifies an end-of-file.
Entry Point: IREAO
Description: To supply data to the calling program in a logical (as opposed to a physical) manner
Format: CALL !READ(lUN,ARRY,NARY,IMETH,NT,IRTN)
where IUN is as described in IOPEN
ARRY is the array into which a record is transmitted.
NARY is an imeger input which requests the number of words to be transmitted. If NARY is zero.
no words will be transmitted. If NARY is negative, the words will be skipped but not transmitted.
If |NARY] is greater than the number of words remaining, the remaining words are processed
(skipped or transmrtted) and NT is set to this number and IRTN is set to 1 .
IMETH is an imeger input which specifies how to proceed through the logical record. If IMETH -
0. the current logical record is continuously processed until an end-of-record return (IRTN - 1) is
given. If IMETH - 1, the remaining data (if any) at the conclusion of IREAD, in the cunent logical
record, is skipped.
NT is an integer output value which contains the number of words transmitted or skipped if IRTN
is 1 on return from IREAD.
IRTN is an imager output value which indicates the status on return from IREAD.
IRTN - 0 Normal return
IRTN - 1 End of logical record hit while trying to process NARY words
IRTN - 2 End-of-file hit for this data block
(Continued)
5.4-163 (8/5/91)

0UTPUT2
DIRECT MATRIX ABSTRACTION
OUTPUT2 (Com.)
Method: OUTPUT2 physical records are read imo a buffer area. These records are, at most, 2
BUFFSIZE words long. The currant position is maintained and data is transmitted (or skipped) from the
buffer to the ARRY array. If the MSC/NASTRAN logical record spans several physical FORTRAN
records these are transparent (no end of record returns) to the user.
The following examples show the use of the above calling sequences.
1. Read a record of known length (but less than a known maximum)
DIMENSION ARRY(5000)DATA NARY /S0007
CALL IREADflUN.ARRY.NAflY.O.IWR.IRTH)
IF(IRTH.Eai)GOTO10
c
c
c
c
c
c
10
RECORD LONGER THAN 5000 WORDS
OR END OF RLE(IRTN-2)STOP
CONTINUE
NUMBER OF ACTUAL WORDS IS IN IWF
20
DO20I-1.IWR
Z - ARRY(I)
2. Skip a record
C
c
c
CALL IREAD(IUNARRY,0,1,IWR,IRTN)IF(IRTN ,NE 2) GO TO 30
END OF FILE
30
STOP
CONTINUE
3. Skip 20 words
CALL IREAD(IUN,ARRY,-20.0,IWR,IRTN)
(Continued)
5.4-164(8/5/91)

0UTPUT2DMAP MOOULE AND STATEMENT DESCRIPTIONS
OUTPUT2 (Com.)
4. Read a record 30 words at a time
CALL IREAD(IUNARRY,30,0,rWR,IRTN)IF(IRTN -1) 50.60.70
c
c
c
PROCESS 30 WORDS
50 CONTINUE
GO TO 40
c
c END OF FlL(ON FIRST)c READ SINCE IRTN MUST GO TO 1
c BEFORE 2)70 CONTINUE
c STOP
c END OF RECORO
60 CONTINUE
An example of the entire program s given below:
c
C THE PURPOSE OF THIS ROUTINE IS TO ILLUSTRATE READING
C OUTPUT2 OUTPUT
C
C IT ASSUMES THAT TWO DATA BLOCKS GPL AND BGPDT HAVE
C SEEN WRITTEN OH FORTRAN UNIT 20
C THE FORMAT Or ALL MSC/HA3TRAH DATA BLOCKS ARE DOCUMENTED
C IN THE PROGRAMMERS MANUAL SECTION 2
C
Z THE GRID POINT LIST (GPL) WILL BE PLACED IN THE GP ARRAY
C
C 3GPDT WILL BE PROCESSED 4 WORDS AT A TIME (THE NATURAL ENTRY
C LENGTH) AND A TABLE WILL BE PRINTED.
C
C EXTERNAL ID X Y Z DISP COORD SYS
C
c
C THE FOLLOWING DMAP ALTER WILL ALLOW GENERATION OF OUTPUT ON
C FORTRAN UNIT 20
C
C SOL 24
C ALTER 9
C 00TP0T2 GPL/ /V,N, ITAPE1/V, N, IUNIT-20/V, N,TEST00T2-' TEST0CT2'
3
C 0UTPUT2 GPL//V,N,ITAP2 /V,N, IUNIT/V, SI, TEST0UT2 S
C TABPT GPL// S
C 00TPUT2 BGPDT//V,N. ITAP33/V, N. IUNIT/V, N.TEST0UT2 S
C 0UTPUT2 BG?DT//V,N.ITAP4 9/V.U, IUNIT/V, N, TEST0UT2 S
C TABPT BGPDT// 5
C EXIT
(Continued)
5.4-165 (8/5/91)

0UTPUT4
DIRECT MATRIX ABSTRACTION
DMAP Statement: OUTPUT4 - Output Matrices onto a FORTRAN Readable File
Description: Write matrices in ASCII or binary format onto a FORTRAN readable file
Format:
OUTPUT* M1.M2.M3.M4,M5//TTAPE/IUNIT/BCDOPT/BIGMAT $
Describers:
M1
M2
M3
M4
M5
ITAPE
Up to five matrices
Input-integer-default - -1. (TAPE controls the status of the unit before OUTPUT4 starts to
write any matrices as follows:
IUNIT
BCOOPT
BIGMAT
Remarks:
TAPE ACTION
0 None
-1 Rewind IUNIT before Write
-2 End File and Rewind IUNIT afterWrite
-3 Both
Input-integer-defautt - 0. The absolute value of IUNIT is the FORTRAN unit number on
which the matrices win be written. If IUNIT is negative, the sparse output option will be
used, which means only nonzero items in the matrix are written to the unit.
Input-imeger-defaut - 1. If BCOOPT * 1 the file is output in ASCII format The default
value results in a FORTRAN binary format. See Remark 3.
Input-logical-default - FALSE. BIGMAT FALSE selects the format which uses a string
header as described under Remark 1 . But. if the matrix has more than 65535 rows, then
the other format is used regardless of the value specified for BIGMAT.
1 . Each matrix will be written on IUNIT as follows:
(Continued)
5.4-172(8/5/91)

DMAP MODULE AND STATEMENT DESCRIPTIONS
0UTPUT4 (Com.)
OUTPUT4
Record
Number
2,3, etc.
(nonsparse)
2.3 etc.
(sparse)
Word
1
2
3
4
5.6
1
2
3
4-NW+3
1
2
3
Type
I
I
I
I
B
I
4-NW+3
If BIGMAT . FALSE { I
If BIGMAT - TRUE
Meaning
Number of columns (NCOL)
Number of rows (NR)
Form of matrix (NF)
Type of matrix (NTYPE)
DMAP Name (2A4 format)
Column number (ICOL)
Row position of first nonzero term (IROW)
Number of words In the column (NW)See Remark 3.
Column element values, either real or
complex and single or double precision
>See itemS
in Section 5.2
J
Repeated for
> each nonzero'
column, i-1,...,N
Column number (ICOL)
Zero
Number of words in the column (NW)
See Remark 3.
Strings of nonzero terms as follows:
String Header (IS). IS combines the
length of the string, L, and the row
position, IROW of the first term in the
string imo one word, and L - INT
(IS/65536) and IROW - IS - (L 65536).
For example, a string 6 words long
beginning in row 4 has IS - 393.220.
Length of string, (L)
Row position of first term in
string (IROW)
Column element values either real or
complex and single or double precision J
(Continued)
v Repeated for
r each string
5.4-173(8/5/91)

0UTPUT4
DIRECT MATRIX ABSTRACTION
OUTPUT4 (Com.)
2. A record with the last column number plus +1 and at least one value in the next record will be
written on IUNIT.
3. The number of words per column is the number of elements in the column times the number
of words per type. Number of words per type is given as follows:
Type No. Words/Type
1 Real S.P. 1
2 - Real O.P. 2
3 - Complex S.P. 2
4 - Complex O.P. 4
4. The ASSIGN FMS statement is recommended for assigning the FORTRAN unit (see
Section 2.2). Selection of a proper value for IUNIT is machine dependent. See Section
7.622 of the MSONASTRANApplicationManual.
5. If the non-sparse option is selected, zero terms will be explicitly present after the first nonzero
term in any column until the last nonzero term.
6. Null columns will not be output.
7. An entire column must fit in memory.
8. The FORTRAN binary file option (BCDOPT - 1) is the preferred method when the file is to be
used on the same computer. BCDOPT * 1 format allows use of the file on another computer
type and the FORMATTED Keyword must be specified on the ASSIGN File Management
statement.
9. The output format of these files can be read by the INPUTT4 module.
10. The following FORTRAN programs illustrate (1) the creation of two matrices by OUTPUT4
(on Unit 11), (2) the reading of these two matrices (by subroutine GETIDS), (3) the writing of
matrices acceptable to INPUTT4 (subroutine MAKIDS). and (4) the acceptance of these
matrices by the program. If the '1 1'
were changed to '-1 1'
the sparse format would be used.
a. The program must be modified if the BCD option is used.
b. The program is designed to read matrices less than 65536 rows. (BIGMAT - FALSE).
(Continued)
5.4-174(8/5/91)

APPENDIX 1 1
Miscellaneous Data File and Plots

11-1

11-2

11-3

a n
us-
*"Jif"*Ttc W
>--*3-
X
A
11 -4

11-5

11-6

The NASTRAN data file created for analytical solution is listed below explaining various
input data commands. BOLD UPPER CASE expressions are NASTRAN commands
and lower case letters are comment lines. The following file is for a 8 mass - 9 spring
example to get OUTPUT4 file that was saved in the data file FOR0ll.DAT in binary
format The FOR01 l.DAT file is read by subroutine RDBN of program COMPARE and
various matrices are stored in individual files. These are later used to perform correlation
(Cross-Orthogonality check) with experimental data documented through SMS-STAR
and saved in AS8.ASC. For more information on NASTRAN data deck refer to
NASTRANdocumentation19' 10' " I2'. The sign S (dollar) in the first column of the data
file indicates comment line, this line is skipped by NASTRAN.
ID NASTRAN, DYNAMICS
The ED statement is optional, it defines a title to the program for easy identification. Its
not used by the NASTRAN program.
TIME 10
The maximum allowable time in CPU minutes, it is an optional command.
DIAG8
Requests diagnostic output. This command is quite helpful in diagnostics and for special
options depending upon the number of the Diag activated.
SOL 3
Defines the Solution to be executed depending on the number.
11 -7

COMPILE DMAP=SOL3,SOUIN=MSCSOU,NOLISTu\OREF S
Requests the compilation of a SUB-DMAP, ALTER and RFALTERS
ALTER 437 S
Alter statement is used to include statements into DMAPs
DELETE /P2G/ S
Clears the matrix P2G
MATGEN EQEXIN/EXTINT/9/O/LUSET S
Refers toMATGEN in User's manual II-5.4
VECUSET/GVECyGYQVCOMP'
S
Creates a partition vector GVEC
Note: NASTRAN re-orients the grid numbers internally to make its solution process
efficient and outputs the data in the sequence of its internal grid numbers, which may be
different than the order of grid numbers given by the operator. To force NASTRAN to
output data in the same node sequence as given by the operator, a DMAP was written by
Mark Hammer of Eastman Kodak Company at Rochester, NY. The following portion is
from Hammer's routine to get the internal and external grid definitions to match.
MPYAD EXTTNT,UGV,/UGVEXT/1
Multiply matrix[EXTTNT]1
with [UGV] and save in UGVEXT
SMPYAD EXTINT,MGG,EXTINT,/MGGEXT/3////l////6 S
11-8

Multiply a series ofmatrices subject to the parameters.
The above command means[EXTINT]T
[MGG] [EXTINT],
SMPYAD EXTINT,KGG,EXTINT,,,/KGGEXT/3////l////6 S
Multiply a series ofmatrices subject to the parameters.
The above command means[EXTLNT]T
[KGG] [EXTINT],
MPYAD EXTINT,GVEC,/GVEC2/1 S
Multiply matrix[EXTENT]1
with [GVEC] and save in GVEC2
PARTN UGVEXTGVEC2/,PHTVO2/0/0 S
Partitions matrix [UGVEXT] subject to row partition vector GVEC2, save to PHTV02
PARTNMGGEXT,GVEC2,/,MGGNEWM S
Partitions matrix [MGGEXT] subject to row partition vector GVEC2, save toMGGNEW
PARTN KGGEXT,GVEC2,/,KGGNEW/-1 S
Partitions matrix [KGGEXT] subject to row partition vector GVEC2, save to KGGNEW
End Hammer's routine
OUTPUT4 PHIV02,MGGNEWJKGGNEW//-3/ll S
Binary file output into FOROl l.DAT
MATPRN UGV,MGG,KGG// S
Prints the total eigenvectors, mass and stiffness matrices to'F06'
file
MATPRN UGVEXT,MGGEXT,KGGEXT// S
Prints the eigenvectors, mass and stiffness matrices to'F06'
file
MATPRN PHTV02,MGGNEW,KGGNEW// S
11-9

Prints the eigenvectors, mass and stiffness matrices,'F06'
file, expressed in the original
sequence as desired by the operator.
CEND
End ofExecutive commands.
TITLE=UNDAMPED EIGENVALUE ANALYSIS
Title is displayed / printed on top of each page of the file.
SUBTI=8 MASS, 9 SPRING PROBLEM
Sub-title is printed on top of each page of the file, below the title.
METHOD=10 S
The METHOD command is required to call the method of eigenvalue extraction from
Givens, Modified Givens etc.
DISPAY=ALL
Displays (Output) the displacements of all nodes through 'ALL'.
BEGIN BULK
The command is at the beginning ofBulk Data and marks the end ofCase Control.
GRID 101 0.0 0.0 0.0 123456
The definition ofGrid ED, coordinates and boundary conditions. The boundary conditions
123456 means totally constrained.
GRID 102 1.0 0.0 0.0 23456
Same as above but the boundary conditions 23456 means free in X direction.
GRID 103 2.0 0.0 0.0 23456
11-10

Defines the scalar spring connection between nodes
CELAS2,l,1.0,10l,l,102,l
Defines the concentrated mass at a node / location
CONM24 1,102,^2.5
The EIGR card defines the eigenvalue solution method, number of modes, range of
frequency, and eigenvector normalization.
EIGR,10,GrV8,+EIGR
+EIGR,MASS
The end of the NASTRAN data file is flagged by the ENDDATA card (Note the spelling)
ENDDATA
11-11