Embed Size (px)
Citation preview

Research ArticleDynamic Simulation of a Warship Control Valve Based on aMechanical-Electric-Fluid Cosimulation Model
Jiazhen Han 12 Yudong Xie 12 Yong Wang 12 and Qixian Wang3
1School of Mechanical Engineering Shandong University Jinan 250061 China2e Key Laboratory of High-efficiency and Clean Mechanical Manufacture Ministry of Education Jinan 250061 China3Ocean College Zhejiang University Hangzhou 310058 China
Correspondence should be addressed to Yudong Xie ydxiesdueducn and Yong Wang meywangsdueducn
Received 10 November 2020 Revised 1 March 2021 Accepted 9 April 2021 Published 19 April 2021
Academic Editor Han Zhang
Copyright copy 2021 Jiazhen Han et al is is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Control valves have an important function in the warship power system In engineering practice the fluid oscillation insidethe control valve causes the additional load to the valve actuator When the additional load is added to the original load ofthe valve it is possible that the required driving force (or driving moment) of the valve is greater than the maximum force (ormoment) output by the actuator which may cause the abnormal stop of the actuator Conventionally the interaction effectof the valve mechanical and electric components on the valve chamberrsquos flow field cannot be considered in computationalfluid dynamics (CFD) simulations so the oscillating fluid loads cannot be accurately obtained In order to solve thisproblem the mechanical-electric-fluid integrated valve model using the FLUENT and AMESim cosimulation method wasdeveloped to embody the interaction effect between the components of each part of the control valve and exhibit the fluidoscillation during the operating process of the control valve Compared with the pure software simulations the unsteadyflow characteristics and dynamic response of the actuator were synchronously obtained in this study which accuratelycaptured the sudden fluid loads required for further compensation At the same time the differences in performance ofdifferent valve plugs were compared e stability time of the valve plug and oscillation amplitude of the unstable fluid loadswere distinct for control valves with different flow characteristics e results can aid in understanding the instabilitymechanism of the fluid load in the control valve better which provides the calculation basis for compensating the additionalload on the valve plug and improve the reliability of the control valve
1 Introduction
Warship control valves are valves that regulate the fluidtransportation of the nuclear islands of nuclear power plantsconventional power plants (marine steam turbines) andauxiliary control systems in commercial and military shipsWhen warships perform complex actions with the suddeninflux of a large-flow working medium the control valve isin the dynamic process of starting closing and adjusting Anunsteady fluid-structure interaction (FSI) effect is formedamong the pressure flow and structures (such as the valveplug) in the control valve e interaction between the flowcharacteristics of the fluid and the movement of the valveinternals leads to unstable and oscillating fluid loads on the
valve plug which causes the additional load on the actuatorWhen the additional load is superimposed on the originalload of the control valve the driving force or driving torquerequired by the valve may be greater than the maximumforce or torque output by the actuator (to avoid damage tothe valve sealing surface valve stem or valve shaft due to theoutput force or torque of the actuator greatly exceeding thevalve load the maximum output force or torque is 18 timesof the normal load) which would cause the actuator to fail toact or perform abnormally In order to eliminate the in-fluence of the fluid oscillation and improve the controlaccuracy and reliability of the control valve the outputtorque of the actuator of the control valve can be com-pensated on demand For example when the valve plug is
HindawiScience and Technology of Nuclear InstallationsVolume 2021 Article ID 6683871 14 pageshttpsdoiorg10115520216683871
subject to a large fluid load the actuator will output a largetorque when the valve plug is subject to a small fluid loadthe actuator will output a small torque erefore it isnecessary to accurately obtain the oscillating fluid loads onthe valve plug so as to achieve the purpose of compensatingfor the additional coupling load
e unsteady fluid load and fluid oscillation of thecontrol valve have previously been extensively exploredOwing to the dynamic movement of the valve pressure andflow fluctuations can occur within the valve systems inrocket propulsion systems and it may be accompanied bycavitation resonance and even failure To predict thetransient behavior of the valve motion and provideguidance for engine operations simulations of valvemotion using a mesh library strategy were presented byAhuja et al[1] Cavallo et al[2] and Shipman et al[3] eresults captured the valversquos flow characteristics and un-steady phenomena Saha et al[4] investigated the dynamicflow process of a pressure valve using FLUENT compu-tational fluid dynamics (CFD) software ey applied aforce balance method in combination with dynamic meshtechnology to predict the spool position and calculate thetransient variation of the flow forces e simulation re-sults also demonstrated the effect of the friction coefficientbetween the spool and the valve body on the spoolmovement To investigate the effect of high-pressure safetyvalve dynamics on steady flow performance Beune et al[5]conducted CFD analysis with FSI using a multiple gridapproach e results indicated the opening characteristicsand possible instabilities of the valve for liquid and gasflows Additionally they proposed targeted analysismethods for sensitivity to valve dynamics and openingcharacteristics Investigating the vibration phenomenon ofthe steam valve in the piping system of the power plantunder partial opening conditions Morita et al[6] focusedon the flow fluctuations around the steam control valve tounderstand the valve instability using experiments andCFD calculations e results indicated that the complexflow attached to the valve body can cause fluctuation in therotating pressure and an asymmetric load under themiddle-opening condition which are the main cause ofvalve vibrations Misra et al[7] studied the mechanism thatcauses the self-excited vibration of a pipeline system basedon a fluid-structure dynamic model of the control valvecircuit e numerical results indicated that the self-ex-cited vibration mechanism of the control valve wascomplex and was affected by the valve itself and thepipeline system such as water hammer effect negativehydraulic stiffness or acoustic feedback To further un-derstand the mechanisms of flow-induced vibrations in theVenturi valve Yonezawa et al[8] conducted numericalsimulations and experiments using rigid and flexible valvehead supports ey explained the inherent relationshipbetween the unsteady flow and valve head vibrations forvarious operating conditions ey also verified that thehigh-pressure region on the surface of the valve plug wasthe main reason for the lateral oscillating fluid force whichwas a negative damping force Many other studies ofcontrol valves have also conducted [9ndash14]
However the electric control valve is a coupled closed-loop system consisting of mechanical components called theregulating mechanism and actuator an electric componentcalled the control system and a fluid component called theflow field of the valve chamber As the valve works thereexists coupling among the fluid flow the mechanicalcomponent and the electric component In the numericalsimulation of the valve flow field CFD software such asFLUENT or CFX cannot model the actuator and controlsystem As a result the effect of these two components on theflow field cannot be considered inevitably resulting in alarge simulation deviation of the fluid load on the valve plugIn addition most of the displacement curves of the valveplug in the current studies were known beforehandHowever in most automatic valves such as the electriccontrol valve the valve plug displacement is the result ofautomatic feedback in the system And the opening of thiscontrol valve depends on the pipeline pressure fluctuationsthe electric driving force of the actuator and the unbalancedforce of the mechanical structure which are in turn affectedby the valve opening Certainly the opening curve is difficultto determine in advance Software such as AMESim orSimulink can calculate the opening curve of the valve plugBut during the dynamic adjustment of the control valve acoupling between the flow field and the regulating mecha-nism occurs because of the effect of FSI the fluid affects themovement of the valve plug by changing its loads whereasthe variation in the valve plug position directly changes theflow field and continues to affect the movement of the valveplug Here the valve housing model of the control valve issimplified to a one-dimensional model Considering theunsteady coupling effect in this limited area is difficult andthe effect of the flow field on the regulating mechanismactuator and control system is not adequately consideredthus the calculation accuracy of the fluid load on the valveplug is also affected With the increasing complexity of suchconcerns the relevant literature shows that some scholars inthe fields of machinery electric power and architecture[15 16] have adopted the coupled cosimulation methodusing multidisciplinary software to effectively solve somespecific problems In general the basic function of thecontrol valve is to change the medium flow pressuretemperature or other parameters by receiving the controlsignal output from the regulating control unit In this studywe selected the flow rate as the control targete actuator ofthe control valve adjusts the opening and closing of the valveplug according to the output signal of the controller so thatthe outlet flow rate attains the desired value is is acomplex feedback control process erefore the focus ofthis study was to conduct a holistic study on the mechanical-electric-fluid system of the control valve using the couplingmethod of both FLUENT and AMESim and consider theirmutual effect between the various valve components that aredifficult to observe in a single software simulation Ulti-mately the fluid load on the valve plug is captured whichprovides the calculation basis for further load compensation
By means of the cosimulation an integrated model of thecontrol-valve regulating mechanism actuator control sys-tem and flow field of the valve chamber was establishede
2 Science and Technology of Nuclear Installations
verification of this coupled scheme was performed evelocity and displacement of the valve plug were computedin AMESim to obtain the opening curve of the valve plugWe applied a user-defined function (UDF) and dynamicmesh technology in FLUENTto control the movement of thevalve plug and the transient flow field of the valve plug atvarious movement times was obtained us the likelyunsteadiness of the flow dynamic response of the actuatorand different behavior of the control valve with various flowcharacteristics are presented in this paper
2 Mathematical Models
21 Flow Equation e fluid in this study was in an in-compressible and turbulent flow Hence the flow equationssatisfied the conservation laws of mass momentum andenergy [17 18] which were numerically solved in thecommercial software package FLUENT
e governing equations are described as followsContinuity equation
nabla middot (Urarr
) 0 (1)
Momentum equation
z(ρUrarr
)
zt+ nabla middot (ρU
rarrUrarr
) minusnablap + nabla middot (ϑ middot gradUrarr
) + ρfrarr
(2)
where Urarr
is the velocity vector t is the time ρ is the density pis the pressure ϑ is the kinetic viscosity and f
rarris the body
force vectorAs heat exchange is not involved the energy equation is
not considered
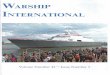
22 Fluid-Structure Interaction Dynamics EquationFigure 1 shows the sketch map of the simulated controlvalve e valve was mainly made up of a valve body a valveplug a valve stem an electric actuator a controller a valvedisplacement sensor and a flowmeter In this study thecontrol target was the valve outlet flow rate e operationprinciple of the control valve was as follows when thewarshiprsquos working conditions or operating conditionschanged the outlet flow rate of the control valve deviatedfrom the desired value rough the detection and trans-mission of the flowmeter and transmitter the outlet flow ratewas sent to the controller e controller compared this flowrate signal with the target signal and calculated an outputusing the corresponding control rule Based on this outputthe motor calculated speed and torqueis torque would beoutput by the actuator en according to the feedbackinformation of the valve positioner the flow area betweenthe valve plug and the valve seat was changed to make thevalve outlet flow rate consistent with the desired value so asto realize the flow control behind the valve
e valve plug and stem frequently moved along thevertical orientation because of the constraint of the valvebody structure When the control valve was operating thevalve plug and stem moved under the action of four forces
the fluid load Fl(t) electric driving force Fd(t) gravity forceG and friction force between the valve stem and the packingFf as shown in Figure 1 According to Newtonrsquos law theacceleration euroY(t) of the valve plug and valve stem relating totheir equivalent mass m is as follows
m euroY (t) Fl(t) + Fd(t) + G + Ff Ff c _Y(t)1113966 (3)
where _Y(t) is the velocity of the valve plug and stem c is theequivalent viscous damping coefficient and the frictionforce is equivalent to a viscous damping force which isproportional to the speed
3 Cosimulation Models
31 Schematic Design for the Cosimulation e schematic[19] of the cosimulation platform is shown in Figure 2 Onlyone executable application was available in the cosimulatione FLUENTmodel was identified as the master and pilotsof the AMESim model which was identified as a slave
For the two models to communicate with each other aninterface referred to as ldquoUserCosimrdquo was created on theAMESim sketch With this interface a dynamic link library(DLL) was generated from the AMESim model During thecosimulation FLUENT exchanged the input and output ofthe data and implemented the call of DLL files through asecondary development function called the UDF In thisprocess the medium software Microsoft Visual Studio wasused to achieve the bridging role All data were synchro-nously transmitted and exchanged and communicationbetween the two models occurred only at fixed time steps(see Figure 3)
Furthermore the movement of the valve plug wascompleted by the dynamic mesh technology In FLUENTthe dynamic mesh model can be used to simulate flowswhere the shape of the flow domain was changing with timebecause of motion on the flow domain boundaries emotion can be a prescribed motion (for example you can
Electric actuator
Valve plug
Valve stem
Valve body
Controller
D
Q
Fl
Ff
Fd
G
D valve positionerQ flowmeter and transmitter
Figure 1 Sketch of the simulated control valve
Science and Technology of Nuclear Installations 3
define the linear and angular velocities about the center ofgravity of a solid body with time) or an unprescribed motionwhere the subsequent motion was determined based on thesolution at the current time (for example the linear andangular velocities were computed from the force balance ona solid body) In order to apply the dynamic mesh model astarting volume mesh and the description of the motion ofmoving zones should be provided FLUENT provided threedynamic mesh motion methods to update the mesh in themoving zone which were smoothing layering andremeshing methods
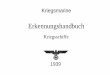
32 AMESimModel for the Cosimulation e cosimulationmodel was built on the AMESim system (see Figure 4) emodel is divided into two parts the data exchange moduleand integrated model of the control valvee data exchangemodule called the UserCosim interface was used to set theexchanged variablese left side of the UserCosim interfacewas the variables calculated by AMESim and provided toFLUENT and the right side was the variables calculated byFLUENT and sent to AMESim Every variable appeared inpairs and was correlated with each other using the receiverand transmitter submodels And submodels with the samecolor belong to the same variable A receiver submodel canbe used to receive a variable from a transmitter submodelwithout any visible connection on the sketch In otherwords the receiver output was actually a duplicate of thetransmitter input All the exchanged variables on theboundary of the two software are presented in Figure 5 eintegrated model was composed of the control-valve flowfield regulating mechanism actuator and control system InAMESim the flow field was represented by inlet and outlet
pressure sources which were built using fluid models fromthe hydraulic library for flow boundary conditions eworking fluid was liquid water with a density of 9982 kgm3and dynamic viscosity of 0001003 kg(mmiddots) e regulatingmechanism and the actuator were represented by a massrack pinion reducer gear and motor which were builtfrom the mechanical library e function of the electricalmotor was to convert the output signal of the controller intothe thrust or torque of the valve e function of the gearreducer rack and pinion was to convert the thrust or torqueinto the displacement e regulating mechanism wascomposed of the valve plug and stem which were repre-sented by a mass block And a displacement sensor wasconnected next to the mass block to obtain the valve plugdisplacemente function of the regulating mechanismwasto change the flow area of the valve according to the dis-placement signal e control system was represented by aproportional-integral-differential (PID) controller and aseries of sensors which were built using electric signalmodels to link the control units and physical sensors Herethe sensor used a flowmeter which was installed on thedownstream pipeline of the control valve to monitor thevalve outlet flow and connected with the PID controller toform a flow feedback system e comparison elementcompared the feedback signal output by the flowmeter withthe target value signal to obtain the deviation signal enthe controller calculated the deviation signal and transmittedthe results to the actuatore initial parameters of each partof the model are listed in Table 1
In the AMESim to FLUENT direction when the cosi-mulation was launched AMESim provided the pressuresource values of the valve inlet and outlet as boundaryconditions for FLUENT e PID controlled the motor
AMESimmodel
AMESim DLL
Slave MasterMedium
AMESimsolver
FLUENTmodel
FLUENT UDF
FLUENTsolverMicroso visual studio
UserCosim InterfaceAMESimFLUENT
Figure 2 Schematic of the cosimulation platform
CALL CALL CALL
ReturnReturnReturn
FLUENT
AMESim
ΔtΔtΔt
Δt Δt Δt
Figure 3 Cosimulation time principle
4 Science and Technology of Nuclear Installations
operation according to the flowmeter measurement pro-vided by FLUENT to adjust the valve opening and closing tomaintain the actual flow rate close to the desired flow rateMeanwhile AMESim calculated the force balance on thevalve plug during the opening and closing of the controlvalve based on Equation (3) Subsequently the displacementof the valve plug resulting from the force balance calculationin AMESim was fed back to FLUENT to enable it to updatethe valve plug position and the dynamic mesh around thevalve
33 FLUENT Model for the Cosimulation
331 Parameter Settings of the Numerical Approach inFLUENT For the CFD simulation model of the controlvalve the profile curve of the valve plug was designedaccording to the formula of linear inherent flow charac-teristics [20 21] e front and rear pipelines of the valvewere lengthened twice and six times respectively compared
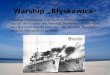
with the pipe diameter to ensure sufficient fluid flow egrid was generated using ANSYS ICEM An unstructuredgrid was used to mesh the entire flow field and the gridaround the valve seat and plug was refined Before selectingthe final cell number a grid independence study was per-formed with several types of computational cells Figure 6shows that the flow rate at the valve outlet varied withdifferent grid numbers When the grid number was 120000the flow rate did not change significantly To save compu-tation time we adopted this grid scheme Similarly the timestep was selected to be 10minus5s and the number of internalmaximum iterations for a single time step was 300 afterseveral levels of tests Here the dynamic parameters of thecontrol valve no longer produced a further change with thevariation in the time step Figure 7 shows the grid model ofthe control valve with a 10 opening e grid size wasapproximately 120000 cells
e simulation was carried out in software ANSYSFLUENT 170 the RNG turbulence k-ε model was adopted[22 23]e flowing fluid inside the valve was liquid water asthe same as AMESim All the walls were assumed to have noslip Pressure boundary conditions defined by the UDF wereapplied to the inlet and outlet of the control valve Duringtransient valve flow the valve plug and stem moved insidethe valve body e boundary surface of the valve plug andstem was defined as the dynamic mesh zones in the dynamicmesh setting e motion type of the dynamic zones wasrigid body motion which was an option available inFLUENT Mesh around the dynamic regions needs to bedefined to accommodate valve plug and stem motionSmoothing and remeshing were employed for this meshdefinitione displacement of the valve plug received fromAMESim was defined in the UDF And it can be read by themacro ldquoDEFINE_CG_MOTION()rdquo from FLUENT to re-generate the mesh A segregated solver was used and thePISO algorithm was applied to the coupling of pressure andvelocity And second-order upwind scheme was used for alldiscrete terms In the transmit simulation under relaxationfactors have an important influence on the convergence ofthe simulation Here the pressure the density the bodyforces k ε and the turbulent viscosity were set as 03 1 107 08 and 1 respectively When the residuals were less
Table 1 Nominal parameters of the AMESim model
Part Parameter Unit ValueControl valve Inlet pressure resource MPa 10Control valve Outlet pressure resource MPa 8Rack Pinion diameter mm 30Gear Large diameter mm 100Gear Small diameter mm 50PID controller Proportional gain mdash 80PID controller Integral gain mdash 1PID controller Derivative gain mdash 0Constant signal Desired flow rate Lmin 80000Mass Quality kg 10
Cosimulation = + +
AMESim-Fluent Cosimulation of a control valve
UserCosim block used to handle dataexchanges between softwares
Gear
ReducerTransmitter
Flowmeter used to monitorvalve outlet flow rate
Rack and pinion
Mass used to compute the forcebalance on the valve spool
ReceiverWater properties
Inlet pressure source Outlet pressure source
Electrical motor used to convert the outputsignal of the PID controller into a rotary signal
PID controler used to calculate the deviationsignal and transmit the results to the actuator
Constant signal used to seta target flow rate value
Comparison element used to completethe subtraction between the constant
signal and the feedback signal to obtainthe deviation signal
Fluid(flow field)
Mechanical(regulating mechanism and actuator)
Electric(control system)
Figure 4 Modified the AMESim model for cosimulation
Fluid load Inletoutletflow rate
Inletoutletpressure
Valve displacementand velocity
FLUENT AMESim
Figure 5 Exchanged variables between two solvers
Science and Technology of Nuclear Installations 5
than 10minus7 for continuity and 10minus6 for other parameters thesimulated flow field was considered to have attained theconvergence criterion
In the FLUENT to AMESim direction when the cosi-mulation was launched FLUENTcalculated the flow aroundthe valve plug based on Equations (1) and (2) and then thevalue of the fluid load on the valve plug due to this flow aswell as the value of the inlet and outlet flow rate was sent toAMESim e movement area of the valve plug was con-trolled using dynamic mesh technology Ultimately dataexchange and coupling occurred between the codes ofAMESim and FLUENT
332 FLUENT Validation In order to prove the reliabilityof the parameter settings and the solution scheme in theFLUENT simulation a comparison validation was per-formed with the results of Qian et al[24] e model wasbased on a pilot-control globe valve and simulated in ANSYSFLUENT 170 maintaining all the parameter settings thesame as those of Qian et al [24] Figure 8 shows the steadyvalve plug displacement for our computational results andexperimental results of Qian et al[24] e trends of thesimulation results and experimental results were within anacceptable range is demonstrated the feasibility of thepure FLUENT simulation and validated the numerical set-tings used for the simulation of the valve in this study
34 Verification for the Coupled Scheme Due to the limi-tation of the experimental conditions we conducted theverification of the coupled scheme by comparing the resultsbetween the pure FLUENT simulation and the FLUENT
Pres
sure
inle
t
Pres
sure
out
let
200mm 200mm
Figure 7 Modified FLUENT grid model of fluid zones of the control valve
6 16 1810 122 84 14Cell number (104)
25200
25300
25400
25500
25600
25700
25800
25900
Out
let fl
ow ra
te (L
min
)
Figure 6 Flow rate under different computational cells
02468
101214161820222426
Stea
dy v
alve
plu
g di
spla
cem
ent (
mm
)
00 01 05 06 080702 0403Inlet pressure (MPa)
Quian et al (k = 5100Nm)Current study (k = 5100Nm)
Qian et al (k = 7700Nm)Current study (k = 7700Nm)
Figure 8 Comparison of the results of the current study and thoseof Qian et al[24]
6 Science and Technology of Nuclear Installations
AMESim cosimulation with the same parametersemodelwas based on a simplified spring-loaded check valve egoverning equation for this motion of the valve is expressedas follows
Fprime(t) kX(t) + Ffprime + mprime euroX (t) Ff
prime c _X(t)1113966 (4)
where Fprime(t) is the fluid load on the valve plug X(t) _X(t)and euroX(t) are the displacement velocity and acceleration ofthe valve plug respectively k is the stiffness of the spring mprimeis the mass of the valve plug c is the equivalent viscousdamping coefficient and the friction force of the valve plugFfprime is also equivalent to a viscous damping force which is
proportional to the speed of the valve plugIn the pure FLUENT simulation the valve plug motion
was solved using an iterative scheme based on the classicalRunge-Kutta method When the number of iteration timesteps was zero the valve was in a static statee accelerationof the valve plug euroX
n(t) at n time steps was calculated by
using the following equation
euroXn
(t) Fprimen(t) minus kX
n(t) minus c _X
n(t)
mprime (5)
where Fprimen(t) is the fluid load on the valve plug Xn(t) is thedisplacement of the valve plug and _X
n(t) is the velocity of
the valve plug at n number of time stepsen the displacement Xn+1(t) and velocity _X
n+1(t) of
the valve plug motion at the next number of time steps n + 1become
Xn+1
(t) Xn(t) + _X
n(t)Δt +
12
euroXn(t)Δt2
_Xn+1
(t) _Xn(t) + euroX
n(t)Δt
(6)
where Δt is the time stepe UDF was compiled to achieve the iteration scheme
and it was loaded into the FLUENT solver to control themovement of the valve plug More detailed settings andinformation related to the grid independence study and theselection of the time step for FLUENT calculations arediscussed in Section 33 e final grid model of the checkvalve is shown in Figure 9
In the FLUENTAMESim cosimulation a cosimulationmodel for the data exchange module and the spring systemwas established in the AMESim solver as shown in Fig-ure 10 e valve plug was represented by a mass For theexchanged variables between the two solvers FLUENTcalculated the fluid load on the valve plug based on Equa-tions (1) and (2) is fluid load was input to AMESim tosimulate the spring system based on Equation (4) efeedback on the velocity of the valve plug from AMESimwas in turn delivered to FLUENT to update the valve plugposition for the next iteration
Figure 11 shows a comparison of the results of thedisplacement response and fluid load on the valve plugbetween the pure FLUENT simulation and FLUENTAMESim cosimulation with the same parameters A goodagreement was observed which demonstrated the feasibilityof the coupled scheme
4 Results
41 Dynamic Studies Related to Valve Timing In the initialsimulation status the inlet and outlet pressures of thecontrol valve were 10 and 8MPa respectively Meanwhilethe valve opening was maintained at 10 First a steadysimulation using FLUENT was conducted to obtain a stableflow field and the flow rate at the valve outlet was 25820 Lmin en the cosimulation was performed for transientcalculation under the condition of setting the same time step(in AMESim and FLUENT solvers) residual accuracy (inFLUENT solver) and calculation tolerance (in AMESimsolver) Additionally the number of internal maximum it-erations for a single time step was set in the FLUENT solverso that the dynamic simulation can converge at each timestep e outlet flow rate set by the PID controller was80000 Lmin To attain the desired value of the outlet flowrate the actuator of the control valve adjusted the openingand closing of the valve plug according to the output signalof the controller When the flow rate at the valve outletattained the target value the valve opening no longerchanged at a balanced position and the cosimulationachieved convergence
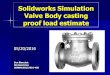
Figure 12 shows the dynamic curves of the valve plugdisplacement flow rate at the valve outlet fluid load anddriving force of the actuator acting on the valve plug andvalve stem during the dynamic change of the valve openingIn the first 7ms the fluid load acting on the valve plugexhibited an oscillating and unstable form whereas thedriving force of the actuator originally increased and thendecreased And the direction of these two forces changedduring this period of time When the valve plug displace-ment increased to the first peak value of 40mm the valveopening was approximately 36 In this process the flowrate at the valve outlet transformed from a sharp accelerationwith a large curve slope to a linear acceleration which wasrelated to the increase and decrease in the valve plug speedSubsequently the valve plug moved toward the closingdirection and the flow rate variation at the valve outletslowed down After exceeding 4 of the desired flow valuethe outlet flow rate gradually decreased Since the signaldifference received by the PID controller was not zero thevalve plug continued to adjust continuously and its dis-placement again exhibited several decaying fluctuationsEventually at time t 035 s the flow rate at the valve outletwas approximately 80000 Lmin e valve plug remained ata final opening of 30 with a very small fluctuation Si-multaneously the resultant force of the valve plug wasapproximately zero which indicated that the fluid load anddriving force of the actuator acting on the plug tended to bestable but there was a slight fluctuation
A warship environment is complex and changeableWith the leaping change in the shiprsquos working conditionswhen a warship implements many complicated actions oftactics and techniques the valve plug is subjected to randomand oscillating fluid loads in the process of dynamic ad-justment especially from t 0001 s to t 0005 s andt 0012 s to t 0016 s (see Figure 13) e resultant force ofthis fluid load and driving force of the actuator may be
Science and Technology of Nuclear Installations 7
greater or less than the actual adjustment force required bythe valve plug reducing the control precision of the controlvalve Furthermore oscillating fluid loads can cause vibra-tion noise and other hazards on the valve plug ereforethe oscillating fluid loads need to be compensated on de-mand to reduce the valve plug oscillation and improve thestability of the control valve
Figures 14 and 15 depict the pressure field and velocitydistributions in the valve chamber during the valve plugmovement For the period of the simulation the mostrepresentative time points were selected e pressure dis-tributions in Figure 14 show that the pressure of the flowchannel showed a decreasing trend from the pipeline inlet tothe pipeline outlet from t 0001 s to t 06 s In the orifice
region between the valve plug and valve seat the flow areawas limited and the pressure drop was large the pressuredrop primarily overcame the resistance of the flow channelin the control valve As the valve plug moved from the firstmaximum displacement (at time t 0007 s) to the closingdirection a low-pressure region was generated on the side ofthe valve plug and seat Along with the dynamic adjustmentof the valve opening this low-pressure region was contin-uously enlarged and moved away from the valve seat to thevalversquos downstream chamber for 0012 slt tlt 0090 s A partof the low-pressure region also appeared at the top of thevalve housing At t 06 s the valve plug has attainedequilibrium and the low-pressure region was gradually notapparent Moreover we observed that the upper end of the
Pres
sure
inle
t
Pres
sure
out
let
50mm20mm Valve plug
Figure 9 Grid model for verification
Water properties
UserCosim block used to handle dataexchanges between soware types
Mass used to compute the forcebalance on the valve spool
Spring
Spool_VelocityUserCosim
InterfaceAMESimFLUENT
Fluid_Force
Figure 10 AMESim model for validation
1290
1300
1310
1320
1330
1340
1350
Plug
disp
lace
men
t (m
m)
2010 150500Time (s)
FLUENT simulationCosimulation
(a)
ndash7
ndash5
ndash3
ndash1
1
3
5
7
Flui
d lo
ad (N
)
20151000 05Time (s)
FLUENT simulationCosimulation
(b)
Figure 11 Comparison of the results of the pure FLUENT simulation and FLUENTAMESim cosimulation (a) Displacement response(b) Fluid load acting on valve plug
8 Science and Technology of Nuclear Installations
times104
times104
times104
10
13
16
19
22
25
Flui
d lo
ad (N
)
120
125
130
135
140
145
0001 0002 0003 0004 0005
001000 003 004002 005Time (s)
00130012 00150014 0016200
205
210
215
220
Figure 13 Transient variation of fluid loads on plug surfaces
0010
0015
0020
0025
0030
0035
0040
0045
Plug
disp
lace
men
t (m
)
0502 0600 0401 03Time (s)
(a)
20000
30000
40000
50000
60000
70000
80000
90000
Volu
me fl
ow ra
te (L
min
)
0502 0600 0401 03Time (s)
(b)
ndash150000
ndash100000
ndash50000
0
50000
100000
150000
200000
250000
300000
Flui
d lo
ad (N
)
0502 0600 0401 03Time (s)
(c)
ndash150000
ndash50000
50000
150000
250000
350000
450000
Driv
ing
forc
e (N
)
0502 04 0600 01 03Time (s)
(d)
Figure 12 Cosimulation results for the valversquos dynamic variation versus time (a) Valve plug displacement (b) Volume flow rate at the valveoutlet (c) Fluid load on the valve plug (d) Driving force of the actuator
Science and Technology of Nuclear Installations 9
t = 0001s t = 0007s t = 0012s
t = 0028s t = 0046s t = 0066s
t = 0090s t = 0150s t = 0600s
Pressure (Pa) 70E + 06 74E + 06 78E + 06 82E + 06 86E + 06 90E + 06 94E + 06 98E + 06
Figure 14 Pressure field distributions at different times
t = 0001s t = 0007s t = 0012s
t = 0028s t = 0046s t = 0066s
t = 0090s t = 0150s t = 0600s
8075706560555045403530252015105Velocity (ms)
Figure 15 Velocity magnitude distributions at different times
10 Science and Technology of Nuclear Installations
valve plug was attached to a low-pressure region which wasprone to cavitation resulting in potential damage to thevalve plug
For the pressure field of t 0007 s the fluid pressure inthe valve cavity decreased from the bottom face to the upperface of the valve plug and the maximum pressure in thevicinity of the bottom of the valve plug was approximately98MPa In the subsequent 5ms the area occupied by thehigh-pressure region on the lower half surface of the valveplug gradually expanded at t 0012 s in particular thepressure in the partial region was approximately 10MPaReferring to the fluid load curve obtained by AMESimshown in Figure 13 the fluid load acting on the valve plugcontinuously increased within this period (from t 0007 s tot 0012 s) e main reason was that as the valve plugmoved toward the closing direction during this period theflow area of the orifice region became smaller and thepressure fluctuation in the valve cavity increased which leadto a larger area of the high-pressure region on the lowersurface of the plug On the other hand the fluid load on thevalve plug was obtained by integrating the surface area of thevalve plug with the pressure distribution on the upper andlower surfaces of the valve plug us the increase of thepressure difference between the lower and upper surfaces ofthe valve plug made the fluid load increase A similarphenomenon occurred in the period from t 0090 to0150 s erefore the calculation results of AMESim wereobserved to correspond with those of FLUENT
Figure 15 shows the sequence of the velocity magnitudecontours In the initial opening process of the valve plug fortlt 0005 s the flow area at the orifice was small e flowchannels were in a strong throttling state which caused thefluid pressure to decrease and the velocity to increase in theorifice region As the fluid accelerated through the narrowgap of the orifice the valve seat functioned as a throatresulting in a jet at t 0007 s that hit the valve plug at highvelocities After t 0012 s the valve plug moved toward theclosing direction and an asymmetric jet occurred at bothsides of the valve seat e asymmetric accelerating fluidcaused the hydraulic inductance owing to inertia It acted onthe surface of the valve plug and coupled with the movingvalve plug as well as the uneven pressure gradient in thisregion which were the main reasons for variable and os-cillating fluid loads on the valve plug (see Figure 13)
From Figure 16 the velocity of the jet region was higherthan that of the nearby fluid region when the fluid flowedthrough the orifice In the first 10ms the high-speed andlow-speed streams were mixed in the nearby regionresulting in a strong shear effect which caused the formationof vortices in the low-speed region Owing to the structuralobstruction vortices appeared on the left side and top wall ofthe valve body where the fluid stagnated and its velocitydecreased At t 0012 s vortex production at the lip of thevalve seat resulted in unsteady shedding and a large amountof energy was removed the phenomenon of vortex sheddingchanged the pressure distribution around the valve seat (seeFigure 14) which caused a sudden change in the fluid loadon the valve plug Furthermore the jet spread out further tothe valversquos downstream chamber which cannot avoid the
flow pathrsquos bend resulting in the formation of a recirculationregion as shown at t 0028 s is recirculation regionexpanded to the bottom of the downstream pipeline andoccupied the flow channel space Consequently the main-stream fluid was squeezed and its flow direction wasdisturbed
42 Dynamic Studies Related to Different Valve Plugs Tofurther explore the dynamic performance of the controlvalve plug we changed the shape of the valve plug eprofile curves of two other valve plugs with the flow char-acteristics of quick-opening and equal percentage weredesigned according to the calculation formula of the in-herent flow characteristic [20 21] and the cosimulations forthese two valves were conducted During the simulationprocess the initial opening percentage of the valve plugdesired flow rate at valve outlet boundary conditions andsolution parameters were unchanged e simulation resultswere as follows
Figure 17 shows the variation in fluid loads on the valveplug under different plug shapes By comparison we ob-served that in the first 1ms the fluid load acting on the equalpercentage plug exhibited high-frequency oscillations alongthe horizontal axis which was far greater than that of thefluid load acting on the other two types of valve plugserefore more load compensation was needed for the equalpercentage plug in this time period e oscillation trend ofthe unstable fluid loads acting on the quick-opening plugwas similar to that of the linear plug which was charac-terized by irregular and pulse-like fluctuations and itsfluctuation amplitude was larger than that of the linear plugAs the valve opening increased the amplitude attenuation ofthe fluid load acting on the linear plug was the fastest eoscillating fluid loads experienced by three different types ofvalve plugs gradually decreased and then fluctuated within asmall range When the valve plug attained equilibrium thefluid load acting on the quick-opening plug was the largestwhereas the equal percentage plug was the smallest whichdiffers by approximately 13 times as shown in Table 2
Figure 18 shows the dynamic change in the flow rate atthe valve outlet As the initial displacement of the valve plugincreased the outlet flow rate for the control valve with theflow characteristic of equal percentage fluctuated signifi-cantly within 1mse flow behavior was consistent with thehigh-frequency oscillating fluid loads (Figure 17) the largerthe flow fluctuation the greater the oscillating amplitude ofthe fluid load on the valve plug is process produced animpulsive force on the valve plug which would causestructural failure When the outlet flow rate for the threecontrol valves with different flow characteristics tended tothe desired value all the valve plugs were balanced to achievethe goal of controlling the flow rate behind the valve
Figure 19 shows the flow curves when three controlvalves were in a stable state We observed that the outlet flowrate for every control valve was approximate to the targetvalue but it had a certain deviation from the desired valueand the deviation degree was less than 001 as shown inTable 3 In combination with the actual situation the valve
Science and Technology of Nuclear Installations 11
could not completely maintain the desired value because offactors such as its own structure and external interferenceduring the working process erefore this result suggestedthat after three types of control valves with flow charac-teristics of equal percentage quick-opening and linearattained equilibrium their outlet flow rate value with thedesired value had slight differences
On the other hand although the valve plug was balancedthe flow rate at the valve outlet still exhibited slight fluc-tuations near the desired value To compare the stability timeof different valve plugs we analyzed how fast the outlet flowrate stabilizes for each valve plug considering a deviation of01 (within the engineering allowable range) as the stabilitycriterion In other words when the outlet flow rate becameand remained in the range of 79920ndash80080 Lmin it wasconsidered to have attained stability Figure 19 and Table 3show that the outlet flow of the control valve with the flowcharacteristic of equal percentage was the first to attain therange of this zone and its stability time was the shortest Incontrast the control valve with the flow characteristic ofquick-opening lagged behind the other two valves
In summary when a certain pressure is given at the inletand outlet of the control valve (in this study the inlet andoutlet pressures were 10 and 8MPa respectively) the valveplug moves from a 10 opening to the balance position tocontrol the flow behind the valve e stability time of thecontrol valve with the flow characteristic of equal percentageis fast but this valve plug is subjected to sharply rapidlyoscillating fluid loads in the movement process the quick-opening valve plug takes a long time to attain stability andthe fluid load acting on the plug is large in the balanceposition e fluctuation amplitude of the fluid load appliedto the linear valve plug is relatively low and the damage tothis valve plug is small In practice the selection and design
t = 0001s
t = 0012s
t = 0066s
t = 0150s
t = 0007s
t = 0028s
t = 0090s
t = 0600s
8075706560555045403530252015105Velocity (ms)
Figure 16 Streamlines at different simulation times
times104
ndash5
0
5
10
15
20
25
30
Flui
d lo
ad (N
)
007 008003 006005004002001000Time (s)
times10ndash4
times106
ndash25ndash20ndash15ndash10
ndash505
2 864 100
LinearQuick-openingEqual percentage
Figure 17 Transient variation of fluid loads on different plugsurfaces
Table 2 Fluid load difference at the balance position for differentvalve plugs
e fluid loadon the plug Linear Quick-opening Equal percentage
At the balanceposition (N) 207867 223922 171488
12 Science and Technology of Nuclear Installations
requirements for the control valve plug are different owingto different working environments For example wheninvolving the high-security region on the warship thecontrol valve is required to respond rapidly in an emergencyto achieve rapid regulation erefore the valve plugrsquos
stability time is the focus and the valve plug with faststability time should be selected For control valves that workfrequently the valve plug is constantly in the process ofdynamic adjustment so we should choose the valve plugwith a smaller fluctuation amplitude of the fluid load
5 Conclusion
Based on the FSI a cosimulation for the mechanical-electric-fluid system of the control valve was performed using theFLUENT and AMESim platforms e interaction effectbetween the valve components and fluid flow was com-prehensively considered rough the coupling calculationand data exchange of the two software the opening curve ofthe control valve in the dynamic adjustment process wasobtained e UDF and dynamic mesh technology were alsoused to solve the problem of instantaneous changes in thecalculation region caused by the valve plug movement
Compared with the pure simulations this study per-formed a synchronous analysis of the unsteady flow fieldcharacteristics in the valve cavity and the dynamic responseof the actuator As the valve plug dynamically moved aplurality of low-pressure zones of different sizes appeared inthe valve chamber because of the FSI effect e jet flowformed by the asymmetric high-speed fluid near the valveseat area was accompanied by the vortex shedding phe-nomenon Moreover we observed that the valve plug surfacewas subjected to unstable and oscillating fluid loads whicheasily caused the valve plug to vibrate ese dynamicsimulation results can give theoretical guidance for accu-rately compensating the additional fluid load on the valveplug
e behavior of the control valve with different flowcharacteristics was compared by changing the valve plugshape For inlet and outlet pressures of the control valve of10 and 8MPa respectively the valve plug beginning to movefrom the 10 opening position the results indicated that thecontrol valve with the flow characteristic of equal percentagewas sensitive to the effect of the fluid flowe fluctuation inthe flow rate at this valve outlet and the oscillation of thefluid load acting on this valve plug were high for a smallopening exceeding those of the control valves with the flowcharacteristics of quick-opening and linear And more loadcompensation was required for the equal percentage plug Inaddition the control valve with the flow characteristic ofequal percentage was the first to attain equilibrium with thefastest stability time whereas the control valve with the flowcharacteristic of quick-opening was the slowest When thecontrol valve was stable the deviation between the outletflow rate value and the desired value for every type of controlvalve with three different flow characteristics was negligible
times104
0
1
2
3
4
5
6
7
8
9
10
Volu
me fl
ow ra
te (L
min
)
006 008002 004000Time (s)
times10ndash4
times104
150 105 2030354045505560
LinearQuick-openingEqual percentage
Figure 18 Outlet flow rate of the control valve corresponding todifferent plugs
times104
2
3
4
5
6
7
8
9
Volu
me fl
ow ra
te (L
min
)
01 04 0600 02 0503Time (s)
79920
80080
80000
80003
060504030201
LinearQuick-openingEqual percentage
Figure 19 Outlet flow rate of the control valve corresponding todifferent plugs in the balance position
Table 3 Flow rate difference in stable value and stable time fordifferent valve plugs
e flow rate atvalve outlet Linear Quick-opening Equal
percentageStable value (Lmin) 8000085 8000115 8000183Stability time (s) 0198 0245 0187
Science and Technology of Nuclear Installations 13
Owing to the various types of warship control valves theoperating characteristics of the valves should be completelymastered according to the actual working environmentswhen selecting them is study provides a new insightscheme on the dynamic analysis and performance evaluationin control valves e results are significant to reduce thefailure rate of the warship control valve improve the controlaccuracy and prolong the life of the valve
Data Availability
e data used to support the findings of this study are in-cluded within the article
Conflicts of Interest
e authors declare no conflicts of interest
Acknowledgments
is research was funded by the National Natural ScienceFoundation of China (Grant nos 51775310 and 51875316) theKey Research and Development Project of Shandong Province(Grant no 2019GHY112052) the Natural Science Foundationof Shandong Province (Grant no ZR2019MEE025) the Na-tional Key Research and Development Project of China (Grantno 2016YFD0701104) and the Project for Scientific ResearchInnovation Team of Young Scholar in Colleges and Univer-sities of Shandong Province (Grant no 2020KJB001)
References
[1] V Ahuja A Hosangadi P Cavallo and R Daines ldquoAnalysesof transient events in complex valve and feed systemsrdquo inProceedings Of the 41st AIAAASMESAEASEE Joint Pro-pulsion Conference And Exhibit pp 1ndash13 Tucson AZ USAJuly 2005
[2] P A Cavallo A Hosangadi and V Ahuja ldquoTransient sim-ulations of valve motion in cryogenic systemsrdquo in ProceedingsOf the 35th AIAA Fluid Dynamics Conference And Exhibitpp 1ndash11 Toronto Ontario Canada June 2005
[3] J Shipman A Hosangadi and V Ahuja ldquoUnsteady analysesof valve systems in rocket engine testing environmentsrdquo inProceedings Of the 40th AIAAASMESAEASEE Joint Pro-pulsion Conference And Exhibit pp 1ndash10 Fort LauderdaleFlorida USA July 2004
[4] B K Saha H Chattopadhyay P B Mandal andT Gangopadhyay ldquoDynamic simulation of a pressure regu-lating and shut-off valverdquo Computers amp Fluids vol 101pp 233ndash240 2014
[5] A Beune J G M Kuerten and M P C van Heumen ldquoCFDanalysis with fluid-structure interaction of opening high-pressure safety valvesrdquo Computers amp Fluids vol 64 no 3pp 108ndash116 2012
[6] R Morita F Inada M Mori K Tezuka and Y TsujimotoldquoCFD simulations and experiments of flow fluctuationsaround a steam control valverdquo Journal of Fluids Engineeringvol 129 no 1 pp 48ndash54 2007
[7] A Misra K Behdinan and W L Cleghorn ldquoSelf-excitedvibration of a control valve due to fluid-structure interactionrdquoJournal of Fluids and Structures vol 16 no 5 pp 649ndash6652002
[8] K Yonezawa R Ogawa K Ogi et al ldquoFlow-induced vibrationof a steam control valverdquo Journal of Fluids and Structuresvol 35 no 776 pp 76ndash88 2012
[9] C Bolin and A Engeda ldquoAnalysis of flow-induced instabilityin a redesigned steam control valverdquo Applied ermal En-gineering vol 83 pp 40ndash47 2015
[10] G Palau-Salvador P Gonzalez-Altozano and J Arviza-Valverde ldquoree-dimensional modeling and geometricalinfluence on the hydraulic performance of a control valverdquoJournal of Fluids Engineering vol 130 no 1 pp 151ndash1632008
[11] Y Xie Y Wang Y Liu F Cao and Y Pan ldquoUnsteadyanalyses of a control valve due to fluid-structure couplingrdquoMathematical Problems in Engineering vol 2013 Article ID174731 7 pages 2013
[12] J Tecza G Chochua and R Moll ldquoAnalysis of fluid-structureinteraction in a steam turbine throttle valverdquo in ProceedingsOf the ASME Turbo Expo Power for Land Sea and Airpp 2329ndash2338 Glasgow UK June 2010
[13] X Sun X Li Z Zheng and D Huang ldquoFluid-structure in-teraction analysis of a high-pressure regulating valve of a 600-MW ultra-supercritical steam turbinerdquo Proceedings of theInstitution of Mechanical Engineers Part A Journal of Powerand Energy vol 229 no 3 pp 270ndash279 2015
[14] H Wang M-j Peng Y-k Liu S-w Liu R-y Xu andH Saeed ldquoRemaining useful life prediction techniques ofelectric valves for nuclear power plants with convolutionkernel and LSTMrdquo Science and Technology of Nuclear In-stallations vol 2020 pp 1ndash13 2020
[15] R Fadaeinedjad M Moallem and G Moschopoulos ldquoSim-ulation of a wind turbine with doubly fed induction generatorby FAST and Simulinkrdquo IEEE Transactions on Energy Con-version vol 23 no 2 pp 690ndash700 2008
[16] R Zhang K P Lam S-c Yao and Y Zhang ldquoCoupledEnergyPlus and Computational Fluid Dynamics Simulationfor Natural Ventilationrdquo Building and Environment vol 68pp 100ndash113 2013
[17] T Kerh J J Lee and L C Wellford ldquoTransient fluid-structure interaction in a control valverdquo Journal of FluidsEngineering vol 119 no 2 pp 354ndash359 1997
[18] R Messahel C Regan M H Souli and C Ruiu ldquoNumericalinvestigation of homogeneous equilibrium model and fluid-structure interaction for multiphase water flows in pipesrdquoInternational Journal of Multiphase Flow vol 98 pp 56ndash662018
[19] LMS LMS ImagineLab AMESim Generic Co-simulation Rev13 Userrsquos Guide Roanne France 2013
[20] Emerson Electric Co Control Valve Handbook Lowa USA2005
[21] B Fitzgerald Control Valves for the Chemical Process In-dustries McGraw-Hill New York NY USA 1995
[22] V Yakhot and S A Orszag ldquoRenormalization group analysisof turbulence I Basic eoryrdquo Journal of Scientific Com-puting vol 1 no 1 pp 3ndash51 1986
[23] L Wang J Cui and K Yao ldquoNumerical simulation and analysisof gas flow field in serrated valve columnrdquo Chinese Journal ofChemical Engineering vol 16 no 4 pp 541ndash546 2008
[24] J-Y Qian Z-X Gao J-K Wang and Z-J Jin ldquoExperimentaland numerical analysis of spring stiffness on flow and valvecore movement in pilot control globe valverdquo InternationalJournal of Hydrogen Energy vol 42 no 27 pp 17192ndash172012017
14 Science and Technology of Nuclear Installations

subject to a large fluid load the actuator will output a largetorque when the valve plug is subject to a small fluid loadthe actuator will output a small torque erefore it isnecessary to accurately obtain the oscillating fluid loads onthe valve plug so as to achieve the purpose of compensatingfor the additional coupling load
e unsteady fluid load and fluid oscillation of thecontrol valve have previously been extensively exploredOwing to the dynamic movement of the valve pressure andflow fluctuations can occur within the valve systems inrocket propulsion systems and it may be accompanied bycavitation resonance and even failure To predict thetransient behavior of the valve motion and provideguidance for engine operations simulations of valvemotion using a mesh library strategy were presented byAhuja et al[1] Cavallo et al[2] and Shipman et al[3] eresults captured the valversquos flow characteristics and un-steady phenomena Saha et al[4] investigated the dynamicflow process of a pressure valve using FLUENT compu-tational fluid dynamics (CFD) software ey applied aforce balance method in combination with dynamic meshtechnology to predict the spool position and calculate thetransient variation of the flow forces e simulation re-sults also demonstrated the effect of the friction coefficientbetween the spool and the valve body on the spoolmovement To investigate the effect of high-pressure safetyvalve dynamics on steady flow performance Beune et al[5]conducted CFD analysis with FSI using a multiple gridapproach e results indicated the opening characteristicsand possible instabilities of the valve for liquid and gasflows Additionally they proposed targeted analysismethods for sensitivity to valve dynamics and openingcharacteristics Investigating the vibration phenomenon ofthe steam valve in the piping system of the power plantunder partial opening conditions Morita et al[6] focusedon the flow fluctuations around the steam control valve tounderstand the valve instability using experiments andCFD calculations e results indicated that the complexflow attached to the valve body can cause fluctuation in therotating pressure and an asymmetric load under themiddle-opening condition which are the main cause ofvalve vibrations Misra et al[7] studied the mechanism thatcauses the self-excited vibration of a pipeline system basedon a fluid-structure dynamic model of the control valvecircuit e numerical results indicated that the self-ex-cited vibration mechanism of the control valve wascomplex and was affected by the valve itself and thepipeline system such as water hammer effect negativehydraulic stiffness or acoustic feedback To further un-derstand the mechanisms of flow-induced vibrations in theVenturi valve Yonezawa et al[8] conducted numericalsimulations and experiments using rigid and flexible valvehead supports ey explained the inherent relationshipbetween the unsteady flow and valve head vibrations forvarious operating conditions ey also verified that thehigh-pressure region on the surface of the valve plug wasthe main reason for the lateral oscillating fluid force whichwas a negative damping force Many other studies ofcontrol valves have also conducted [9ndash14]
However the electric control valve is a coupled closed-loop system consisting of mechanical components called theregulating mechanism and actuator an electric componentcalled the control system and a fluid component called theflow field of the valve chamber As the valve works thereexists coupling among the fluid flow the mechanicalcomponent and the electric component In the numericalsimulation of the valve flow field CFD software such asFLUENT or CFX cannot model the actuator and controlsystem As a result the effect of these two components on theflow field cannot be considered inevitably resulting in alarge simulation deviation of the fluid load on the valve plugIn addition most of the displacement curves of the valveplug in the current studies were known beforehandHowever in most automatic valves such as the electriccontrol valve the valve plug displacement is the result ofautomatic feedback in the system And the opening of thiscontrol valve depends on the pipeline pressure fluctuationsthe electric driving force of the actuator and the unbalancedforce of the mechanical structure which are in turn affectedby the valve opening Certainly the opening curve is difficultto determine in advance Software such as AMESim orSimulink can calculate the opening curve of the valve plugBut during the dynamic adjustment of the control valve acoupling between the flow field and the regulating mecha-nism occurs because of the effect of FSI the fluid affects themovement of the valve plug by changing its loads whereasthe variation in the valve plug position directly changes theflow field and continues to affect the movement of the valveplug Here the valve housing model of the control valve issimplified to a one-dimensional model Considering theunsteady coupling effect in this limited area is difficult andthe effect of the flow field on the regulating mechanismactuator and control system is not adequately consideredthus the calculation accuracy of the fluid load on the valveplug is also affected With the increasing complexity of suchconcerns the relevant literature shows that some scholars inthe fields of machinery electric power and architecture[15 16] have adopted the coupled cosimulation methodusing multidisciplinary software to effectively solve somespecific problems In general the basic function of thecontrol valve is to change the medium flow pressuretemperature or other parameters by receiving the controlsignal output from the regulating control unit In this studywe selected the flow rate as the control targete actuator ofthe control valve adjusts the opening and closing of the valveplug according to the output signal of the controller so thatthe outlet flow rate attains the desired value is is acomplex feedback control process erefore the focus ofthis study was to conduct a holistic study on the mechanical-electric-fluid system of the control valve using the couplingmethod of both FLUENT and AMESim and consider theirmutual effect between the various valve components that aredifficult to observe in a single software simulation Ulti-mately the fluid load on the valve plug is captured whichprovides the calculation basis for further load compensation
By means of the cosimulation an integrated model of thecontrol-valve regulating mechanism actuator control sys-tem and flow field of the valve chamber was establishede
2 Science and Technology of Nuclear Installations
verification of this coupled scheme was performed evelocity and displacement of the valve plug were computedin AMESim to obtain the opening curve of the valve plugWe applied a user-defined function (UDF) and dynamicmesh technology in FLUENTto control the movement of thevalve plug and the transient flow field of the valve plug atvarious movement times was obtained us the likelyunsteadiness of the flow dynamic response of the actuatorand different behavior of the control valve with various flowcharacteristics are presented in this paper
2 Mathematical Models
21 Flow Equation e fluid in this study was in an in-compressible and turbulent flow Hence the flow equationssatisfied the conservation laws of mass momentum andenergy [17 18] which were numerically solved in thecommercial software package FLUENT
e governing equations are described as followsContinuity equation
nabla middot (Urarr
) 0 (1)
Momentum equation
z(ρUrarr
)
zt+ nabla middot (ρU
rarrUrarr
) minusnablap + nabla middot (ϑ middot gradUrarr
) + ρfrarr
(2)
where Urarr
is the velocity vector t is the time ρ is the density pis the pressure ϑ is the kinetic viscosity and f
rarris the body
force vectorAs heat exchange is not involved the energy equation is
not considered
22 Fluid-Structure Interaction Dynamics EquationFigure 1 shows the sketch map of the simulated controlvalve e valve was mainly made up of a valve body a valveplug a valve stem an electric actuator a controller a valvedisplacement sensor and a flowmeter In this study thecontrol target was the valve outlet flow rate e operationprinciple of the control valve was as follows when thewarshiprsquos working conditions or operating conditionschanged the outlet flow rate of the control valve deviatedfrom the desired value rough the detection and trans-mission of the flowmeter and transmitter the outlet flow ratewas sent to the controller e controller compared this flowrate signal with the target signal and calculated an outputusing the corresponding control rule Based on this outputthe motor calculated speed and torqueis torque would beoutput by the actuator en according to the feedbackinformation of the valve positioner the flow area betweenthe valve plug and the valve seat was changed to make thevalve outlet flow rate consistent with the desired value so asto realize the flow control behind the valve
e valve plug and stem frequently moved along thevertical orientation because of the constraint of the valvebody structure When the control valve was operating thevalve plug and stem moved under the action of four forces
the fluid load Fl(t) electric driving force Fd(t) gravity forceG and friction force between the valve stem and the packingFf as shown in Figure 1 According to Newtonrsquos law theacceleration euroY(t) of the valve plug and valve stem relating totheir equivalent mass m is as follows
m euroY (t) Fl(t) + Fd(t) + G + Ff Ff c _Y(t)1113966 (3)
where _Y(t) is the velocity of the valve plug and stem c is theequivalent viscous damping coefficient and the frictionforce is equivalent to a viscous damping force which isproportional to the speed
3 Cosimulation Models
31 Schematic Design for the Cosimulation e schematic[19] of the cosimulation platform is shown in Figure 2 Onlyone executable application was available in the cosimulatione FLUENTmodel was identified as the master and pilotsof the AMESim model which was identified as a slave
For the two models to communicate with each other aninterface referred to as ldquoUserCosimrdquo was created on theAMESim sketch With this interface a dynamic link library(DLL) was generated from the AMESim model During thecosimulation FLUENT exchanged the input and output ofthe data and implemented the call of DLL files through asecondary development function called the UDF In thisprocess the medium software Microsoft Visual Studio wasused to achieve the bridging role All data were synchro-nously transmitted and exchanged and communicationbetween the two models occurred only at fixed time steps(see Figure 3)
Furthermore the movement of the valve plug wascompleted by the dynamic mesh technology In FLUENTthe dynamic mesh model can be used to simulate flowswhere the shape of the flow domain was changing with timebecause of motion on the flow domain boundaries emotion can be a prescribed motion (for example you can
Electric actuator
Valve plug
Valve stem
Valve body
Controller
D
Q
Fl
Ff
Fd
G
D valve positionerQ flowmeter and transmitter
Figure 1 Sketch of the simulated control valve
Science and Technology of Nuclear Installations 3
define the linear and angular velocities about the center ofgravity of a solid body with time) or an unprescribed motionwhere the subsequent motion was determined based on thesolution at the current time (for example the linear andangular velocities were computed from the force balance ona solid body) In order to apply the dynamic mesh model astarting volume mesh and the description of the motion ofmoving zones should be provided FLUENT provided threedynamic mesh motion methods to update the mesh in themoving zone which were smoothing layering andremeshing methods
32 AMESimModel for the Cosimulation e cosimulationmodel was built on the AMESim system (see Figure 4) emodel is divided into two parts the data exchange moduleand integrated model of the control valvee data exchangemodule called the UserCosim interface was used to set theexchanged variablese left side of the UserCosim interfacewas the variables calculated by AMESim and provided toFLUENT and the right side was the variables calculated byFLUENT and sent to AMESim Every variable appeared inpairs and was correlated with each other using the receiverand transmitter submodels And submodels with the samecolor belong to the same variable A receiver submodel canbe used to receive a variable from a transmitter submodelwithout any visible connection on the sketch In otherwords the receiver output was actually a duplicate of thetransmitter input All the exchanged variables on theboundary of the two software are presented in Figure 5 eintegrated model was composed of the control-valve flowfield regulating mechanism actuator and control system InAMESim the flow field was represented by inlet and outlet
pressure sources which were built using fluid models fromthe hydraulic library for flow boundary conditions eworking fluid was liquid water with a density of 9982 kgm3and dynamic viscosity of 0001003 kg(mmiddots) e regulatingmechanism and the actuator were represented by a massrack pinion reducer gear and motor which were builtfrom the mechanical library e function of the electricalmotor was to convert the output signal of the controller intothe thrust or torque of the valve e function of the gearreducer rack and pinion was to convert the thrust or torqueinto the displacement e regulating mechanism wascomposed of the valve plug and stem which were repre-sented by a mass block And a displacement sensor wasconnected next to the mass block to obtain the valve plugdisplacemente function of the regulating mechanismwasto change the flow area of the valve according to the dis-placement signal e control system was represented by aproportional-integral-differential (PID) controller and aseries of sensors which were built using electric signalmodels to link the control units and physical sensors Herethe sensor used a flowmeter which was installed on thedownstream pipeline of the control valve to monitor thevalve outlet flow and connected with the PID controller toform a flow feedback system e comparison elementcompared the feedback signal output by the flowmeter withthe target value signal to obtain the deviation signal enthe controller calculated the deviation signal and transmittedthe results to the actuatore initial parameters of each partof the model are listed in Table 1
In the AMESim to FLUENT direction when the cosi-mulation was launched AMESim provided the pressuresource values of the valve inlet and outlet as boundaryconditions for FLUENT e PID controlled the motor
AMESimmodel
AMESim DLL
Slave MasterMedium
AMESimsolver
FLUENTmodel
FLUENT UDF
FLUENTsolverMicroso visual studio
UserCosim InterfaceAMESimFLUENT
Figure 2 Schematic of the cosimulation platform
CALL CALL CALL
ReturnReturnReturn
FLUENT
AMESim
ΔtΔtΔt
Δt Δt Δt
Figure 3 Cosimulation time principle
4 Science and Technology of Nuclear Installations
operation according to the flowmeter measurement pro-vided by FLUENT to adjust the valve opening and closing tomaintain the actual flow rate close to the desired flow rateMeanwhile AMESim calculated the force balance on thevalve plug during the opening and closing of the controlvalve based on Equation (3) Subsequently the displacementof the valve plug resulting from the force balance calculationin AMESim was fed back to FLUENT to enable it to updatethe valve plug position and the dynamic mesh around thevalve
33 FLUENT Model for the Cosimulation
331 Parameter Settings of the Numerical Approach inFLUENT For the CFD simulation model of the controlvalve the profile curve of the valve plug was designedaccording to the formula of linear inherent flow charac-teristics [20 21] e front and rear pipelines of the valvewere lengthened twice and six times respectively compared
with the pipe diameter to ensure sufficient fluid flow egrid was generated using ANSYS ICEM An unstructuredgrid was used to mesh the entire flow field and the gridaround the valve seat and plug was refined Before selectingthe final cell number a grid independence study was per-formed with several types of computational cells Figure 6shows that the flow rate at the valve outlet varied withdifferent grid numbers When the grid number was 120000the flow rate did not change significantly To save compu-tation time we adopted this grid scheme Similarly the timestep was selected to be 10minus5s and the number of internalmaximum iterations for a single time step was 300 afterseveral levels of tests Here the dynamic parameters of thecontrol valve no longer produced a further change with thevariation in the time step Figure 7 shows the grid model ofthe control valve with a 10 opening e grid size wasapproximately 120000 cells
e simulation was carried out in software ANSYSFLUENT 170 the RNG turbulence k-ε model was adopted[22 23]e flowing fluid inside the valve was liquid water asthe same as AMESim All the walls were assumed to have noslip Pressure boundary conditions defined by the UDF wereapplied to the inlet and outlet of the control valve Duringtransient valve flow the valve plug and stem moved insidethe valve body e boundary surface of the valve plug andstem was defined as the dynamic mesh zones in the dynamicmesh setting e motion type of the dynamic zones wasrigid body motion which was an option available inFLUENT Mesh around the dynamic regions needs to bedefined to accommodate valve plug and stem motionSmoothing and remeshing were employed for this meshdefinitione displacement of the valve plug received fromAMESim was defined in the UDF And it can be read by themacro ldquoDEFINE_CG_MOTION()rdquo from FLUENT to re-generate the mesh A segregated solver was used and thePISO algorithm was applied to the coupling of pressure andvelocity And second-order upwind scheme was used for alldiscrete terms In the transmit simulation under relaxationfactors have an important influence on the convergence ofthe simulation Here the pressure the density the bodyforces k ε and the turbulent viscosity were set as 03 1 107 08 and 1 respectively When the residuals were less
Table 1 Nominal parameters of the AMESim model
Part Parameter Unit ValueControl valve Inlet pressure resource MPa 10Control valve Outlet pressure resource MPa 8Rack Pinion diameter mm 30Gear Large diameter mm 100Gear Small diameter mm 50PID controller Proportional gain mdash 80PID controller Integral gain mdash 1PID controller Derivative gain mdash 0Constant signal Desired flow rate Lmin 80000Mass Quality kg 10
Cosimulation = + +
AMESim-Fluent Cosimulation of a control valve
UserCosim block used to handle dataexchanges between softwares
Gear
ReducerTransmitter
Flowmeter used to monitorvalve outlet flow rate
Rack and pinion
Mass used to compute the forcebalance on the valve spool
ReceiverWater properties
Inlet pressure source Outlet pressure source
Electrical motor used to convert the outputsignal of the PID controller into a rotary signal
PID controler used to calculate the deviationsignal and transmit the results to the actuator
Constant signal used to seta target flow rate value
Comparison element used to completethe subtraction between the constant
signal and the feedback signal to obtainthe deviation signal
Fluid(flow field)
Mechanical(regulating mechanism and actuator)
Electric(control system)
Figure 4 Modified the AMESim model for cosimulation
Fluid load Inletoutletflow rate
Inletoutletpressure
Valve displacementand velocity
FLUENT AMESim
Figure 5 Exchanged variables between two solvers
Science and Technology of Nuclear Installations 5
than 10minus7 for continuity and 10minus6 for other parameters thesimulated flow field was considered to have attained theconvergence criterion
In the FLUENT to AMESim direction when the cosi-mulation was launched FLUENTcalculated the flow aroundthe valve plug based on Equations (1) and (2) and then thevalue of the fluid load on the valve plug due to this flow aswell as the value of the inlet and outlet flow rate was sent toAMESim e movement area of the valve plug was con-trolled using dynamic mesh technology Ultimately dataexchange and coupling occurred between the codes ofAMESim and FLUENT
332 FLUENT Validation In order to prove the reliabilityof the parameter settings and the solution scheme in theFLUENT simulation a comparison validation was per-formed with the results of Qian et al[24] e model wasbased on a pilot-control globe valve and simulated in ANSYSFLUENT 170 maintaining all the parameter settings thesame as those of Qian et al [24] Figure 8 shows the steadyvalve plug displacement for our computational results andexperimental results of Qian et al[24] e trends of thesimulation results and experimental results were within anacceptable range is demonstrated the feasibility of thepure FLUENT simulation and validated the numerical set-tings used for the simulation of the valve in this study
34 Verification for the Coupled Scheme Due to the limi-tation of the experimental conditions we conducted theverification of the coupled scheme by comparing the resultsbetween the pure FLUENT simulation and the FLUENT
Pres
sure
inle
t
Pres
sure
out
let
200mm 200mm
Figure 7 Modified FLUENT grid model of fluid zones of the control valve
6 16 1810 122 84 14Cell number (104)
25200
25300
25400
25500
25600
25700
25800
25900
Out
let fl
ow ra
te (L
min
)
Figure 6 Flow rate under different computational cells
02468
101214161820222426
Stea
dy v
alve
plu
g di
spla
cem
ent (
mm
)
00 01 05 06 080702 0403Inlet pressure (MPa)
Quian et al (k = 5100Nm)Current study (k = 5100Nm)
Qian et al (k = 7700Nm)Current study (k = 7700Nm)
Figure 8 Comparison of the results of the current study and thoseof Qian et al[24]
6 Science and Technology of Nuclear Installations
AMESim cosimulation with the same parametersemodelwas based on a simplified spring-loaded check valve egoverning equation for this motion of the valve is expressedas follows
Fprime(t) kX(t) + Ffprime + mprime euroX (t) Ff
prime c _X(t)1113966 (4)
where Fprime(t) is the fluid load on the valve plug X(t) _X(t)and euroX(t) are the displacement velocity and acceleration ofthe valve plug respectively k is the stiffness of the spring mprimeis the mass of the valve plug c is the equivalent viscousdamping coefficient and the friction force of the valve plugFfprime is also equivalent to a viscous damping force which is
proportional to the speed of the valve plugIn the pure FLUENT simulation the valve plug motion
was solved using an iterative scheme based on the classicalRunge-Kutta method When the number of iteration timesteps was zero the valve was in a static statee accelerationof the valve plug euroX
n(t) at n time steps was calculated by
using the following equation
euroXn
(t) Fprimen(t) minus kX
n(t) minus c _X
n(t)
mprime (5)
where Fprimen(t) is the fluid load on the valve plug Xn(t) is thedisplacement of the valve plug and _X
n(t) is the velocity of
the valve plug at n number of time stepsen the displacement Xn+1(t) and velocity _X
n+1(t) of
the valve plug motion at the next number of time steps n + 1become
Xn+1
(t) Xn(t) + _X
n(t)Δt +
12
euroXn(t)Δt2
_Xn+1
(t) _Xn(t) + euroX
n(t)Δt
(6)
where Δt is the time stepe UDF was compiled to achieve the iteration scheme
and it was loaded into the FLUENT solver to control themovement of the valve plug More detailed settings andinformation related to the grid independence study and theselection of the time step for FLUENT calculations arediscussed in Section 33 e final grid model of the checkvalve is shown in Figure 9
In the FLUENTAMESim cosimulation a cosimulationmodel for the data exchange module and the spring systemwas established in the AMESim solver as shown in Fig-ure 10 e valve plug was represented by a mass For theexchanged variables between the two solvers FLUENTcalculated the fluid load on the valve plug based on Equa-tions (1) and (2) is fluid load was input to AMESim tosimulate the spring system based on Equation (4) efeedback on the velocity of the valve plug from AMESimwas in turn delivered to FLUENT to update the valve plugposition for the next iteration
Figure 11 shows a comparison of the results of thedisplacement response and fluid load on the valve plugbetween the pure FLUENT simulation and FLUENTAMESim cosimulation with the same parameters A goodagreement was observed which demonstrated the feasibilityof the coupled scheme
4 Results
41 Dynamic Studies Related to Valve Timing In the initialsimulation status the inlet and outlet pressures of thecontrol valve were 10 and 8MPa respectively Meanwhilethe valve opening was maintained at 10 First a steadysimulation using FLUENT was conducted to obtain a stableflow field and the flow rate at the valve outlet was 25820 Lmin en the cosimulation was performed for transientcalculation under the condition of setting the same time step(in AMESim and FLUENT solvers) residual accuracy (inFLUENT solver) and calculation tolerance (in AMESimsolver) Additionally the number of internal maximum it-erations for a single time step was set in the FLUENT solverso that the dynamic simulation can converge at each timestep e outlet flow rate set by the PID controller was80000 Lmin To attain the desired value of the outlet flowrate the actuator of the control valve adjusted the openingand closing of the valve plug according to the output signalof the controller When the flow rate at the valve outletattained the target value the valve opening no longerchanged at a balanced position and the cosimulationachieved convergence
Figure 12 shows the dynamic curves of the valve plugdisplacement flow rate at the valve outlet fluid load anddriving force of the actuator acting on the valve plug andvalve stem during the dynamic change of the valve openingIn the first 7ms the fluid load acting on the valve plugexhibited an oscillating and unstable form whereas thedriving force of the actuator originally increased and thendecreased And the direction of these two forces changedduring this period of time When the valve plug displace-ment increased to the first peak value of 40mm the valveopening was approximately 36 In this process the flowrate at the valve outlet transformed from a sharp accelerationwith a large curve slope to a linear acceleration which wasrelated to the increase and decrease in the valve plug speedSubsequently the valve plug moved toward the closingdirection and the flow rate variation at the valve outletslowed down After exceeding 4 of the desired flow valuethe outlet flow rate gradually decreased Since the signaldifference received by the PID controller was not zero thevalve plug continued to adjust continuously and its dis-placement again exhibited several decaying fluctuationsEventually at time t 035 s the flow rate at the valve outletwas approximately 80000 Lmin e valve plug remained ata final opening of 30 with a very small fluctuation Si-multaneously the resultant force of the valve plug wasapproximately zero which indicated that the fluid load anddriving force of the actuator acting on the plug tended to bestable but there was a slight fluctuation
A warship environment is complex and changeableWith the leaping change in the shiprsquos working conditionswhen a warship implements many complicated actions oftactics and techniques the valve plug is subjected to randomand oscillating fluid loads in the process of dynamic ad-justment especially from t 0001 s to t 0005 s andt 0012 s to t 0016 s (see Figure 13) e resultant force ofthis fluid load and driving force of the actuator may be
Science and Technology of Nuclear Installations 7
greater or less than the actual adjustment force required bythe valve plug reducing the control precision of the controlvalve Furthermore oscillating fluid loads can cause vibra-tion noise and other hazards on the valve plug ereforethe oscillating fluid loads need to be compensated on de-mand to reduce the valve plug oscillation and improve thestability of the control valve
Figures 14 and 15 depict the pressure field and velocitydistributions in the valve chamber during the valve plugmovement For the period of the simulation the mostrepresentative time points were selected e pressure dis-tributions in Figure 14 show that the pressure of the flowchannel showed a decreasing trend from the pipeline inlet tothe pipeline outlet from t 0001 s to t 06 s In the orifice
region between the valve plug and valve seat the flow areawas limited and the pressure drop was large the pressuredrop primarily overcame the resistance of the flow channelin the control valve As the valve plug moved from the firstmaximum displacement (at time t 0007 s) to the closingdirection a low-pressure region was generated on the side ofthe valve plug and seat Along with the dynamic adjustmentof the valve opening this low-pressure region was contin-uously enlarged and moved away from the valve seat to thevalversquos downstream chamber for 0012 slt tlt 0090 s A partof the low-pressure region also appeared at the top of thevalve housing At t 06 s the valve plug has attainedequilibrium and the low-pressure region was gradually notapparent Moreover we observed that the upper end of the
Pres
sure
inle
t
Pres
sure
out
let
50mm20mm Valve plug
Figure 9 Grid model for verification
Water properties
UserCosim block used to handle dataexchanges between soware types
Mass used to compute the forcebalance on the valve spool
Spring
Spool_VelocityUserCosim
InterfaceAMESimFLUENT
Fluid_Force
Figure 10 AMESim model for validation
1290
1300
1310
1320
1330
1340
1350
Plug
disp
lace
men
t (m
m)
2010 150500Time (s)
FLUENT simulationCosimulation
(a)
ndash7
ndash5
ndash3
ndash1
1
3
5
7
Flui
d lo
ad (N
)
20151000 05Time (s)
FLUENT simulationCosimulation
(b)
Figure 11 Comparison of the results of the pure FLUENT simulation and FLUENTAMESim cosimulation (a) Displacement response(b) Fluid load acting on valve plug
8 Science and Technology of Nuclear Installations
times104
times104
times104
10
13
16
19
22
25
Flui
d lo
ad (N
)
120
125
130
135
140
145
0001 0002 0003 0004 0005
001000 003 004002 005Time (s)
00130012 00150014 0016200
205
210
215
220
Figure 13 Transient variation of fluid loads on plug surfaces
0010
0015
0020
0025
0030
0035
0040
0045
Plug
disp
lace
men
t (m
)
0502 0600 0401 03Time (s)
(a)
20000
30000
40000
50000
60000
70000
80000
90000
Volu
me fl
ow ra
te (L
min
)
0502 0600 0401 03Time (s)
(b)
ndash150000
ndash100000
ndash50000
0
50000
100000
150000
200000
250000
300000
Flui
d lo
ad (N
)
0502 0600 0401 03Time (s)
(c)
ndash150000
ndash50000
50000
150000
250000
350000
450000
Driv
ing
forc
e (N
)
0502 04 0600 01 03Time (s)
(d)
Figure 12 Cosimulation results for the valversquos dynamic variation versus time (a) Valve plug displacement (b) Volume flow rate at the valveoutlet (c) Fluid load on the valve plug (d) Driving force of the actuator
Science and Technology of Nuclear Installations 9
t = 0001s t = 0007s t = 0012s
t = 0028s t = 0046s t = 0066s
t = 0090s t = 0150s t = 0600s
Pressure (Pa) 70E + 06 74E + 06 78E + 06 82E + 06 86E + 06 90E + 06 94E + 06 98E + 06
Figure 14 Pressure field distributions at different times
t = 0001s t = 0007s t = 0012s
t = 0028s t = 0046s t = 0066s
t = 0090s t = 0150s t = 0600s
8075706560555045403530252015105Velocity (ms)
Figure 15 Velocity magnitude distributions at different times
10 Science and Technology of Nuclear Installations
valve plug was attached to a low-pressure region which wasprone to cavitation resulting in potential damage to thevalve plug
For the pressure field of t 0007 s the fluid pressure inthe valve cavity decreased from the bottom face to the upperface of the valve plug and the maximum pressure in thevicinity of the bottom of the valve plug was approximately98MPa In the subsequent 5ms the area occupied by thehigh-pressure region on the lower half surface of the valveplug gradually expanded at t 0012 s in particular thepressure in the partial region was approximately 10MPaReferring to the fluid load curve obtained by AMESimshown in Figure 13 the fluid load acting on the valve plugcontinuously increased within this period (from t 0007 s tot 0012 s) e main reason was that as the valve plugmoved toward the closing direction during this period theflow area of the orifice region became smaller and thepressure fluctuation in the valve cavity increased which leadto a larger area of the high-pressure region on the lowersurface of the plug On the other hand the fluid load on thevalve plug was obtained by integrating the surface area of thevalve plug with the pressure distribution on the upper andlower surfaces of the valve plug us the increase of thepressure difference between the lower and upper surfaces ofthe valve plug made the fluid load increase A similarphenomenon occurred in the period from t 0090 to0150 s erefore the calculation results of AMESim wereobserved to correspond with those of FLUENT
Figure 15 shows the sequence of the velocity magnitudecontours In the initial opening process of the valve plug fortlt 0005 s the flow area at the orifice was small e flowchannels were in a strong throttling state which caused thefluid pressure to decrease and the velocity to increase in theorifice region As the fluid accelerated through the narrowgap of the orifice the valve seat functioned as a throatresulting in a jet at t 0007 s that hit the valve plug at highvelocities After t 0012 s the valve plug moved toward theclosing direction and an asymmetric jet occurred at bothsides of the valve seat e asymmetric accelerating fluidcaused the hydraulic inductance owing to inertia It acted onthe surface of the valve plug and coupled with the movingvalve plug as well as the uneven pressure gradient in thisregion which were the main reasons for variable and os-cillating fluid loads on the valve plug (see Figure 13)
From Figure 16 the velocity of the jet region was higherthan that of the nearby fluid region when the fluid flowedthrough the orifice In the first 10ms the high-speed andlow-speed streams were mixed in the nearby regionresulting in a strong shear effect which caused the formationof vortices in the low-speed region Owing to the structuralobstruction vortices appeared on the left side and top wall ofthe valve body where the fluid stagnated and its velocitydecreased At t 0012 s vortex production at the lip of thevalve seat resulted in unsteady shedding and a large amountof energy was removed the phenomenon of vortex sheddingchanged the pressure distribution around the valve seat (seeFigure 14) which caused a sudden change in the fluid loadon the valve plug Furthermore the jet spread out further tothe valversquos downstream chamber which cannot avoid the
flow pathrsquos bend resulting in the formation of a recirculationregion as shown at t 0028 s is recirculation regionexpanded to the bottom of the downstream pipeline andoccupied the flow channel space Consequently the main-stream fluid was squeezed and its flow direction wasdisturbed
42 Dynamic Studies Related to Different Valve Plugs Tofurther explore the dynamic performance of the controlvalve plug we changed the shape of the valve plug eprofile curves of two other valve plugs with the flow char-acteristics of quick-opening and equal percentage weredesigned according to the calculation formula of the in-herent flow characteristic [20 21] and the cosimulations forthese two valves were conducted During the simulationprocess the initial opening percentage of the valve plugdesired flow rate at valve outlet boundary conditions andsolution parameters were unchanged e simulation resultswere as follows
Figure 17 shows the variation in fluid loads on the valveplug under different plug shapes By comparison we ob-served that in the first 1ms the fluid load acting on the equalpercentage plug exhibited high-frequency oscillations alongthe horizontal axis which was far greater than that of thefluid load acting on the other two types of valve plugserefore more load compensation was needed for the equalpercentage plug in this time period e oscillation trend ofthe unstable fluid loads acting on the quick-opening plugwas similar to that of the linear plug which was charac-terized by irregular and pulse-like fluctuations and itsfluctuation amplitude was larger than that of the linear plugAs the valve opening increased the amplitude attenuation ofthe fluid load acting on the linear plug was the fastest eoscillating fluid loads experienced by three different types ofvalve plugs gradually decreased and then fluctuated within asmall range When the valve plug attained equilibrium thefluid load acting on the quick-opening plug was the largestwhereas the equal percentage plug was the smallest whichdiffers by approximately 13 times as shown in Table 2
Figure 18 shows the dynamic change in the flow rate atthe valve outlet As the initial displacement of the valve plugincreased the outlet flow rate for the control valve with theflow characteristic of equal percentage fluctuated signifi-cantly within 1mse flow behavior was consistent with thehigh-frequency oscillating fluid loads (Figure 17) the largerthe flow fluctuation the greater the oscillating amplitude ofthe fluid load on the valve plug is process produced animpulsive force on the valve plug which would causestructural failure When the outlet flow rate for the threecontrol valves with different flow characteristics tended tothe desired value all the valve plugs were balanced to achievethe goal of controlling the flow rate behind the valve
Figure 19 shows the flow curves when three controlvalves were in a stable state We observed that the outlet flowrate for every control valve was approximate to the targetvalue but it had a certain deviation from the desired valueand the deviation degree was less than 001 as shown inTable 3 In combination with the actual situation the valve
Science and Technology of Nuclear Installations 11
could not completely maintain the desired value because offactors such as its own structure and external interferenceduring the working process erefore this result suggestedthat after three types of control valves with flow charac-teristics of equal percentage quick-opening and linearattained equilibrium their outlet flow rate value with thedesired value had slight differences
On the other hand although the valve plug was balancedthe flow rate at the valve outlet still exhibited slight fluc-tuations near the desired value To compare the stability timeof different valve plugs we analyzed how fast the outlet flowrate stabilizes for each valve plug considering a deviation of01 (within the engineering allowable range) as the stabilitycriterion In other words when the outlet flow rate becameand remained in the range of 79920ndash80080 Lmin it wasconsidered to have attained stability Figure 19 and Table 3show that the outlet flow of the control valve with the flowcharacteristic of equal percentage was the first to attain therange of this zone and its stability time was the shortest Incontrast the control valve with the flow characteristic ofquick-opening lagged behind the other two valves
In summary when a certain pressure is given at the inletand outlet of the control valve (in this study the inlet andoutlet pressures were 10 and 8MPa respectively) the valveplug moves from a 10 opening to the balance position tocontrol the flow behind the valve e stability time of thecontrol valve with the flow characteristic of equal percentageis fast but this valve plug is subjected to sharply rapidlyoscillating fluid loads in the movement process the quick-opening valve plug takes a long time to attain stability andthe fluid load acting on the plug is large in the balanceposition e fluctuation amplitude of the fluid load appliedto the linear valve plug is relatively low and the damage tothis valve plug is small In practice the selection and design
t = 0001s
t = 0012s
t = 0066s
t = 0150s
t = 0007s
t = 0028s
t = 0090s
t = 0600s
8075706560555045403530252015105Velocity (ms)
Figure 16 Streamlines at different simulation times
times104
ndash5
0
5
10
15
20
25
30
Flui
d lo
ad (N
)
007 008003 006005004002001000Time (s)
times10ndash4
times106
ndash25ndash20ndash15ndash10
ndash505
2 864 100
LinearQuick-openingEqual percentage
Figure 17 Transient variation of fluid loads on different plugsurfaces
Table 2 Fluid load difference at the balance position for differentvalve plugs
e fluid loadon the plug Linear Quick-opening Equal percentage
At the balanceposition (N) 207867 223922 171488
12 Science and Technology of Nuclear Installations
requirements for the control valve plug are different owingto different working environments For example wheninvolving the high-security region on the warship thecontrol valve is required to respond rapidly in an emergencyto achieve rapid regulation erefore the valve plugrsquos
stability time is the focus and the valve plug with faststability time should be selected For control valves that workfrequently the valve plug is constantly in the process ofdynamic adjustment so we should choose the valve plugwith a smaller fluctuation amplitude of the fluid load
5 Conclusion
Based on the FSI a cosimulation for the mechanical-electric-fluid system of the control valve was performed using theFLUENT and AMESim platforms e interaction effectbetween the valve components and fluid flow was com-prehensively considered rough the coupling calculationand data exchange of the two software the opening curve ofthe control valve in the dynamic adjustment process wasobtained e UDF and dynamic mesh technology were alsoused to solve the problem of instantaneous changes in thecalculation region caused by the valve plug movement
Compared with the pure simulations this study per-formed a synchronous analysis of the unsteady flow fieldcharacteristics in the valve cavity and the dynamic responseof the actuator As the valve plug dynamically moved aplurality of low-pressure zones of different sizes appeared inthe valve chamber because of the FSI effect e jet flowformed by the asymmetric high-speed fluid near the valveseat area was accompanied by the vortex shedding phe-nomenon Moreover we observed that the valve plug surfacewas subjected to unstable and oscillating fluid loads whicheasily caused the valve plug to vibrate ese dynamicsimulation results can give theoretical guidance for accu-rately compensating the additional fluid load on the valveplug
e behavior of the control valve with different flowcharacteristics was compared by changing the valve plugshape For inlet and outlet pressures of the control valve of10 and 8MPa respectively the valve plug beginning to movefrom the 10 opening position the results indicated that thecontrol valve with the flow characteristic of equal percentagewas sensitive to the effect of the fluid flowe fluctuation inthe flow rate at this valve outlet and the oscillation of thefluid load acting on this valve plug were high for a smallopening exceeding those of the control valves with the flowcharacteristics of quick-opening and linear And more loadcompensation was required for the equal percentage plug Inaddition the control valve with the flow characteristic ofequal percentage was the first to attain equilibrium with thefastest stability time whereas the control valve with the flowcharacteristic of quick-opening was the slowest When thecontrol valve was stable the deviation between the outletflow rate value and the desired value for every type of controlvalve with three different flow characteristics was negligible
times104
0
1
2
3
4
5
6
7
8
9
10
Volu
me fl
ow ra
te (L
min
)
006 008002 004000Time (s)
times10ndash4
times104
150 105 2030354045505560
LinearQuick-openingEqual percentage
Figure 18 Outlet flow rate of the control valve corresponding todifferent plugs
times104
2
3
4
5
6
7
8
9
Volu
me fl
ow ra
te (L
min
)
01 04 0600 02 0503Time (s)
79920
80080
80000
80003
060504030201
LinearQuick-openingEqual percentage
Figure 19 Outlet flow rate of the control valve corresponding todifferent plugs in the balance position
Table 3 Flow rate difference in stable value and stable time fordifferent valve plugs
e flow rate atvalve outlet Linear Quick-opening Equal
percentageStable value (Lmin) 8000085 8000115 8000183Stability time (s) 0198 0245 0187
Science and Technology of Nuclear Installations 13
Owing to the various types of warship control valves theoperating characteristics of the valves should be completelymastered according to the actual working environmentswhen selecting them is study provides a new insightscheme on the dynamic analysis and performance evaluationin control valves e results are significant to reduce thefailure rate of the warship control valve improve the controlaccuracy and prolong the life of the valve
Data Availability
e data used to support the findings of this study are in-cluded within the article
Conflicts of Interest
e authors declare no conflicts of interest
Acknowledgments
is research was funded by the National Natural ScienceFoundation of China (Grant nos 51775310 and 51875316) theKey Research and Development Project of Shandong Province(Grant no 2019GHY112052) the Natural Science Foundationof Shandong Province (Grant no ZR2019MEE025) the Na-tional Key Research and Development Project of China (Grantno 2016YFD0701104) and the Project for Scientific ResearchInnovation Team of Young Scholar in Colleges and Univer-sities of Shandong Province (Grant no 2020KJB001)
References
[1] V Ahuja A Hosangadi P Cavallo and R Daines ldquoAnalysesof transient events in complex valve and feed systemsrdquo inProceedings Of the 41st AIAAASMESAEASEE Joint Pro-pulsion Conference And Exhibit pp 1ndash13 Tucson AZ USAJuly 2005
[2] P A Cavallo A Hosangadi and V Ahuja ldquoTransient sim-ulations of valve motion in cryogenic systemsrdquo in ProceedingsOf the 35th AIAA Fluid Dynamics Conference And Exhibitpp 1ndash11 Toronto Ontario Canada June 2005
[3] J Shipman A Hosangadi and V Ahuja ldquoUnsteady analysesof valve systems in rocket engine testing environmentsrdquo inProceedings Of the 40th AIAAASMESAEASEE Joint Pro-pulsion Conference And Exhibit pp 1ndash10 Fort LauderdaleFlorida USA July 2004
[4] B K Saha H Chattopadhyay P B Mandal andT Gangopadhyay ldquoDynamic simulation of a pressure regu-lating and shut-off valverdquo Computers amp Fluids vol 101pp 233ndash240 2014
[5] A Beune J G M Kuerten and M P C van Heumen ldquoCFDanalysis with fluid-structure interaction of opening high-pressure safety valvesrdquo Computers amp Fluids vol 64 no 3pp 108ndash116 2012
[6] R Morita F Inada M Mori K Tezuka and Y TsujimotoldquoCFD simulations and experiments of flow fluctuationsaround a steam control valverdquo Journal of Fluids Engineeringvol 129 no 1 pp 48ndash54 2007
[7] A Misra K Behdinan and W L Cleghorn ldquoSelf-excitedvibration of a control valve due to fluid-structure interactionrdquoJournal of Fluids and Structures vol 16 no 5 pp 649ndash6652002
[8] K Yonezawa R Ogawa K Ogi et al ldquoFlow-induced vibrationof a steam control valverdquo Journal of Fluids and Structuresvol 35 no 776 pp 76ndash88 2012
[9] C Bolin and A Engeda ldquoAnalysis of flow-induced instabilityin a redesigned steam control valverdquo Applied ermal En-gineering vol 83 pp 40ndash47 2015
[10] G Palau-Salvador P Gonzalez-Altozano and J Arviza-Valverde ldquoree-dimensional modeling and geometricalinfluence on the hydraulic performance of a control valverdquoJournal of Fluids Engineering vol 130 no 1 pp 151ndash1632008
[11] Y Xie Y Wang Y Liu F Cao and Y Pan ldquoUnsteadyanalyses of a control valve due to fluid-structure couplingrdquoMathematical Problems in Engineering vol 2013 Article ID174731 7 pages 2013
[12] J Tecza G Chochua and R Moll ldquoAnalysis of fluid-structureinteraction in a steam turbine throttle valverdquo in ProceedingsOf the ASME Turbo Expo Power for Land Sea and Airpp 2329ndash2338 Glasgow UK June 2010
[13] X Sun X Li Z Zheng and D Huang ldquoFluid-structure in-teraction analysis of a high-pressure regulating valve of a 600-MW ultra-supercritical steam turbinerdquo Proceedings of theInstitution of Mechanical Engineers Part A Journal of Powerand Energy vol 229 no 3 pp 270ndash279 2015
[14] H Wang M-j Peng Y-k Liu S-w Liu R-y Xu andH Saeed ldquoRemaining useful life prediction techniques ofelectric valves for nuclear power plants with convolutionkernel and LSTMrdquo Science and Technology of Nuclear In-stallations vol 2020 pp 1ndash13 2020
[15] R Fadaeinedjad M Moallem and G Moschopoulos ldquoSim-ulation of a wind turbine with doubly fed induction generatorby FAST and Simulinkrdquo IEEE Transactions on Energy Con-version vol 23 no 2 pp 690ndash700 2008
[16] R Zhang K P Lam S-c Yao and Y Zhang ldquoCoupledEnergyPlus and Computational Fluid Dynamics Simulationfor Natural Ventilationrdquo Building and Environment vol 68pp 100ndash113 2013
[17] T Kerh J J Lee and L C Wellford ldquoTransient fluid-structure interaction in a control valverdquo Journal of FluidsEngineering vol 119 no 2 pp 354ndash359 1997
[18] R Messahel C Regan M H Souli and C Ruiu ldquoNumericalinvestigation of homogeneous equilibrium model and fluid-structure interaction for multiphase water flows in pipesrdquoInternational Journal of Multiphase Flow vol 98 pp 56ndash662018
[19] LMS LMS ImagineLab AMESim Generic Co-simulation Rev13 Userrsquos Guide Roanne France 2013
[20] Emerson Electric Co Control Valve Handbook Lowa USA2005
[21] B Fitzgerald Control Valves for the Chemical Process In-dustries McGraw-Hill New York NY USA 1995
[22] V Yakhot and S A Orszag ldquoRenormalization group analysisof turbulence I Basic eoryrdquo Journal of Scientific Com-puting vol 1 no 1 pp 3ndash51 1986
[23] L Wang J Cui and K Yao ldquoNumerical simulation and analysisof gas flow field in serrated valve columnrdquo Chinese Journal ofChemical Engineering vol 16 no 4 pp 541ndash546 2008
[24] J-Y Qian Z-X Gao J-K Wang and Z-J Jin ldquoExperimentaland numerical analysis of spring stiffness on flow and valvecore movement in pilot control globe valverdquo InternationalJournal of Hydrogen Energy vol 42 no 27 pp 17192ndash172012017
14 Science and Technology of Nuclear Installations

verification of this coupled scheme was performed evelocity and displacement of the valve plug were computedin AMESim to obtain the opening curve of the valve plugWe applied a user-defined function (UDF) and dynamicmesh technology in FLUENTto control the movement of thevalve plug and the transient flow field of the valve plug atvarious movement times was obtained us the likelyunsteadiness of the flow dynamic response of the actuatorand different behavior of the control valve with various flowcharacteristics are presented in this paper
2 Mathematical Models
21 Flow Equation e fluid in this study was in an in-compressible and turbulent flow Hence the flow equationssatisfied the conservation laws of mass momentum andenergy [17 18] which were numerically solved in thecommercial software package FLUENT
e governing equations are described as followsContinuity equation
nabla middot (Urarr
) 0 (1)
Momentum equation
z(ρUrarr
)
zt+ nabla middot (ρU
rarrUrarr
) minusnablap + nabla middot (ϑ middot gradUrarr
) + ρfrarr
(2)
where Urarr
is the velocity vector t is the time ρ is the density pis the pressure ϑ is the kinetic viscosity and f
rarris the body
force vectorAs heat exchange is not involved the energy equation is
not considered
22 Fluid-Structure Interaction Dynamics EquationFigure 1 shows the sketch map of the simulated controlvalve e valve was mainly made up of a valve body a valveplug a valve stem an electric actuator a controller a valvedisplacement sensor and a flowmeter In this study thecontrol target was the valve outlet flow rate e operationprinciple of the control valve was as follows when thewarshiprsquos working conditions or operating conditionschanged the outlet flow rate of the control valve deviatedfrom the desired value rough the detection and trans-mission of the flowmeter and transmitter the outlet flow ratewas sent to the controller e controller compared this flowrate signal with the target signal and calculated an outputusing the corresponding control rule Based on this outputthe motor calculated speed and torqueis torque would beoutput by the actuator en according to the feedbackinformation of the valve positioner the flow area betweenthe valve plug and the valve seat was changed to make thevalve outlet flow rate consistent with the desired value so asto realize the flow control behind the valve
e valve plug and stem frequently moved along thevertical orientation because of the constraint of the valvebody structure When the control valve was operating thevalve plug and stem moved under the action of four forces
the fluid load Fl(t) electric driving force Fd(t) gravity forceG and friction force between the valve stem and the packingFf as shown in Figure 1 According to Newtonrsquos law theacceleration euroY(t) of the valve plug and valve stem relating totheir equivalent mass m is as follows
m euroY (t) Fl(t) + Fd(t) + G + Ff Ff c _Y(t)1113966 (3)
where _Y(t) is the velocity of the valve plug and stem c is theequivalent viscous damping coefficient and the frictionforce is equivalent to a viscous damping force which isproportional to the speed
3 Cosimulation Models
31 Schematic Design for the Cosimulation e schematic[19] of the cosimulation platform is shown in Figure 2 Onlyone executable application was available in the cosimulatione FLUENTmodel was identified as the master and pilotsof the AMESim model which was identified as a slave
For the two models to communicate with each other aninterface referred to as ldquoUserCosimrdquo was created on theAMESim sketch With this interface a dynamic link library(DLL) was generated from the AMESim model During thecosimulation FLUENT exchanged the input and output ofthe data and implemented the call of DLL files through asecondary development function called the UDF In thisprocess the medium software Microsoft Visual Studio wasused to achieve the bridging role All data were synchro-nously transmitted and exchanged and communicationbetween the two models occurred only at fixed time steps(see Figure 3)
Furthermore the movement of the valve plug wascompleted by the dynamic mesh technology In FLUENTthe dynamic mesh model can be used to simulate flowswhere the shape of the flow domain was changing with timebecause of motion on the flow domain boundaries emotion can be a prescribed motion (for example you can
Electric actuator
Valve plug
Valve stem
Valve body
Controller
D
Q
Fl
Ff
Fd
G
D valve positionerQ flowmeter and transmitter
Figure 1 Sketch of the simulated control valve
Science and Technology of Nuclear Installations 3
define the linear and angular velocities about the center ofgravity of a solid body with time) or an unprescribed motionwhere the subsequent motion was determined based on thesolution at the current time (for example the linear andangular velocities were computed from the force balance ona solid body) In order to apply the dynamic mesh model astarting volume mesh and the description of the motion ofmoving zones should be provided FLUENT provided threedynamic mesh motion methods to update the mesh in themoving zone which were smoothing layering andremeshing methods
32 AMESimModel for the Cosimulation e cosimulationmodel was built on the AMESim system (see Figure 4) emodel is divided into two parts the data exchange moduleand integrated model of the control valvee data exchangemodule called the UserCosim interface was used to set theexchanged variablese left side of the UserCosim interfacewas the variables calculated by AMESim and provided toFLUENT and the right side was the variables calculated byFLUENT and sent to AMESim Every variable appeared inpairs and was correlated with each other using the receiverand transmitter submodels And submodels with the samecolor belong to the same variable A receiver submodel canbe used to receive a variable from a transmitter submodelwithout any visible connection on the sketch In otherwords the receiver output was actually a duplicate of thetransmitter input All the exchanged variables on theboundary of the two software are presented in Figure 5 eintegrated model was composed of the control-valve flowfield regulating mechanism actuator and control system InAMESim the flow field was represented by inlet and outlet
pressure sources which were built using fluid models fromthe hydraulic library for flow boundary conditions eworking fluid was liquid water with a density of 9982 kgm3and dynamic viscosity of 0001003 kg(mmiddots) e regulatingmechanism and the actuator were represented by a massrack pinion reducer gear and motor which were builtfrom the mechanical library e function of the electricalmotor was to convert the output signal of the controller intothe thrust or torque of the valve e function of the gearreducer rack and pinion was to convert the thrust or torqueinto the displacement e regulating mechanism wascomposed of the valve plug and stem which were repre-sented by a mass block And a displacement sensor wasconnected next to the mass block to obtain the valve plugdisplacemente function of the regulating mechanismwasto change the flow area of the valve according to the dis-placement signal e control system was represented by aproportional-integral-differential (PID) controller and aseries of sensors which were built using electric signalmodels to link the control units and physical sensors Herethe sensor used a flowmeter which was installed on thedownstream pipeline of the control valve to monitor thevalve outlet flow and connected with the PID controller toform a flow feedback system e comparison elementcompared the feedback signal output by the flowmeter withthe target value signal to obtain the deviation signal enthe controller calculated the deviation signal and transmittedthe results to the actuatore initial parameters of each partof the model are listed in Table 1
In the AMESim to FLUENT direction when the cosi-mulation was launched AMESim provided the pressuresource values of the valve inlet and outlet as boundaryconditions for FLUENT e PID controlled the motor
AMESimmodel
AMESim DLL
Slave MasterMedium
AMESimsolver
FLUENTmodel
FLUENT UDF
FLUENTsolverMicroso visual studio
UserCosim InterfaceAMESimFLUENT
Figure 2 Schematic of the cosimulation platform
CALL CALL CALL
ReturnReturnReturn
FLUENT
AMESim
ΔtΔtΔt
Δt Δt Δt
Figure 3 Cosimulation time principle
4 Science and Technology of Nuclear Installations
operation according to the flowmeter measurement pro-vided by FLUENT to adjust the valve opening and closing tomaintain the actual flow rate close to the desired flow rateMeanwhile AMESim calculated the force balance on thevalve plug during the opening and closing of the controlvalve based on Equation (3) Subsequently the displacementof the valve plug resulting from the force balance calculationin AMESim was fed back to FLUENT to enable it to updatethe valve plug position and the dynamic mesh around thevalve
33 FLUENT Model for the Cosimulation
331 Parameter Settings of the Numerical Approach inFLUENT For the CFD simulation model of the controlvalve the profile curve of the valve plug was designedaccording to the formula of linear inherent flow charac-teristics [20 21] e front and rear pipelines of the valvewere lengthened twice and six times respectively compared
with the pipe diameter to ensure sufficient fluid flow egrid was generated using ANSYS ICEM An unstructuredgrid was used to mesh the entire flow field and the gridaround the valve seat and plug was refined Before selectingthe final cell number a grid independence study was per-formed with several types of computational cells Figure 6shows that the flow rate at the valve outlet varied withdifferent grid numbers When the grid number was 120000the flow rate did not change significantly To save compu-tation time we adopted this grid scheme Similarly the timestep was selected to be 10minus5s and the number of internalmaximum iterations for a single time step was 300 afterseveral levels of tests Here the dynamic parameters of thecontrol valve no longer produced a further change with thevariation in the time step Figure 7 shows the grid model ofthe control valve with a 10 opening e grid size wasapproximately 120000 cells
e simulation was carried out in software ANSYSFLUENT 170 the RNG turbulence k-ε model was adopted[22 23]e flowing fluid inside the valve was liquid water asthe same as AMESim All the walls were assumed to have noslip Pressure boundary conditions defined by the UDF wereapplied to the inlet and outlet of the control valve Duringtransient valve flow the valve plug and stem moved insidethe valve body e boundary surface of the valve plug andstem was defined as the dynamic mesh zones in the dynamicmesh setting e motion type of the dynamic zones wasrigid body motion which was an option available inFLUENT Mesh around the dynamic regions needs to bedefined to accommodate valve plug and stem motionSmoothing and remeshing were employed for this meshdefinitione displacement of the valve plug received fromAMESim was defined in the UDF And it can be read by themacro ldquoDEFINE_CG_MOTION()rdquo from FLUENT to re-generate the mesh A segregated solver was used and thePISO algorithm was applied to the coupling of pressure andvelocity And second-order upwind scheme was used for alldiscrete terms In the transmit simulation under relaxationfactors have an important influence on the convergence ofthe simulation Here the pressure the density the bodyforces k ε and the turbulent viscosity were set as 03 1 107 08 and 1 respectively When the residuals were less
Table 1 Nominal parameters of the AMESim model
Part Parameter Unit ValueControl valve Inlet pressure resource MPa 10Control valve Outlet pressure resource MPa 8Rack Pinion diameter mm 30Gear Large diameter mm 100Gear Small diameter mm 50PID controller Proportional gain mdash 80PID controller Integral gain mdash 1PID controller Derivative gain mdash 0Constant signal Desired flow rate Lmin 80000Mass Quality kg 10
Cosimulation = + +
AMESim-Fluent Cosimulation of a control valve
UserCosim block used to handle dataexchanges between softwares
Gear
ReducerTransmitter
Flowmeter used to monitorvalve outlet flow rate
Rack and pinion
Mass used to compute the forcebalance on the valve spool
ReceiverWater properties
Inlet pressure source Outlet pressure source
Electrical motor used to convert the outputsignal of the PID controller into a rotary signal
PID controler used to calculate the deviationsignal and transmit the results to the actuator
Constant signal used to seta target flow rate value
Comparison element used to completethe subtraction between the constant
signal and the feedback signal to obtainthe deviation signal
Fluid(flow field)
Mechanical(regulating mechanism and actuator)
Electric(control system)
Figure 4 Modified the AMESim model for cosimulation
Fluid load Inletoutletflow rate
Inletoutletpressure
Valve displacementand velocity
FLUENT AMESim
Figure 5 Exchanged variables between two solvers
Science and Technology of Nuclear Installations 5
than 10minus7 for continuity and 10minus6 for other parameters thesimulated flow field was considered to have attained theconvergence criterion
In the FLUENT to AMESim direction when the cosi-mulation was launched FLUENTcalculated the flow aroundthe valve plug based on Equations (1) and (2) and then thevalue of the fluid load on the valve plug due to this flow aswell as the value of the inlet and outlet flow rate was sent toAMESim e movement area of the valve plug was con-trolled using dynamic mesh technology Ultimately dataexchange and coupling occurred between the codes ofAMESim and FLUENT
332 FLUENT Validation In order to prove the reliabilityof the parameter settings and the solution scheme in theFLUENT simulation a comparison validation was per-formed with the results of Qian et al[24] e model wasbased on a pilot-control globe valve and simulated in ANSYSFLUENT 170 maintaining all the parameter settings thesame as those of Qian et al [24] Figure 8 shows the steadyvalve plug displacement for our computational results andexperimental results of Qian et al[24] e trends of thesimulation results and experimental results were within anacceptable range is demonstrated the feasibility of thepure FLUENT simulation and validated the numerical set-tings used for the simulation of the valve in this study
34 Verification for the Coupled Scheme Due to the limi-tation of the experimental conditions we conducted theverification of the coupled scheme by comparing the resultsbetween the pure FLUENT simulation and the FLUENT
Pres
sure
inle
t
Pres
sure
out
let
200mm 200mm
Figure 7 Modified FLUENT grid model of fluid zones of the control valve
6 16 1810 122 84 14Cell number (104)
25200
25300
25400
25500
25600
25700
25800
25900
Out
let fl
ow ra
te (L
min
)
Figure 6 Flow rate under different computational cells
02468
101214161820222426
Stea
dy v
alve
plu
g di
spla
cem
ent (
mm
)
00 01 05 06 080702 0403Inlet pressure (MPa)
Quian et al (k = 5100Nm)Current study (k = 5100Nm)
Qian et al (k = 7700Nm)Current study (k = 7700Nm)
Figure 8 Comparison of the results of the current study and thoseof Qian et al[24]
6 Science and Technology of Nuclear Installations
AMESim cosimulation with the same parametersemodelwas based on a simplified spring-loaded check valve egoverning equation for this motion of the valve is expressedas follows
Fprime(t) kX(t) + Ffprime + mprime euroX (t) Ff
prime c _X(t)1113966 (4)
where Fprime(t) is the fluid load on the valve plug X(t) _X(t)and euroX(t) are the displacement velocity and acceleration ofthe valve plug respectively k is the stiffness of the spring mprimeis the mass of the valve plug c is the equivalent viscousdamping coefficient and the friction force of the valve plugFfprime is also equivalent to a viscous damping force which is
proportional to the speed of the valve plugIn the pure FLUENT simulation the valve plug motion
was solved using an iterative scheme based on the classicalRunge-Kutta method When the number of iteration timesteps was zero the valve was in a static statee accelerationof the valve plug euroX
n(t) at n time steps was calculated by
using the following equation
euroXn
(t) Fprimen(t) minus kX
n(t) minus c _X
n(t)
mprime (5)
where Fprimen(t) is the fluid load on the valve plug Xn(t) is thedisplacement of the valve plug and _X
n(t) is the velocity of
the valve plug at n number of time stepsen the displacement Xn+1(t) and velocity _X
n+1(t) of
the valve plug motion at the next number of time steps n + 1become
Xn+1
(t) Xn(t) + _X
n(t)Δt +
12
euroXn(t)Δt2
_Xn+1
(t) _Xn(t) + euroX
n(t)Δt
(6)
where Δt is the time stepe UDF was compiled to achieve the iteration scheme
and it was loaded into the FLUENT solver to control themovement of the valve plug More detailed settings andinformation related to the grid independence study and theselection of the time step for FLUENT calculations arediscussed in Section 33 e final grid model of the checkvalve is shown in Figure 9
In the FLUENTAMESim cosimulation a cosimulationmodel for the data exchange module and the spring systemwas established in the AMESim solver as shown in Fig-ure 10 e valve plug was represented by a mass For theexchanged variables between the two solvers FLUENTcalculated the fluid load on the valve plug based on Equa-tions (1) and (2) is fluid load was input to AMESim tosimulate the spring system based on Equation (4) efeedback on the velocity of the valve plug from AMESimwas in turn delivered to FLUENT to update the valve plugposition for the next iteration
Figure 11 shows a comparison of the results of thedisplacement response and fluid load on the valve plugbetween the pure FLUENT simulation and FLUENTAMESim cosimulation with the same parameters A goodagreement was observed which demonstrated the feasibilityof the coupled scheme
4 Results
41 Dynamic Studies Related to Valve Timing In the initialsimulation status the inlet and outlet pressures of thecontrol valve were 10 and 8MPa respectively Meanwhilethe valve opening was maintained at 10 First a steadysimulation using FLUENT was conducted to obtain a stableflow field and the flow rate at the valve outlet was 25820 Lmin en the cosimulation was performed for transientcalculation under the condition of setting the same time step(in AMESim and FLUENT solvers) residual accuracy (inFLUENT solver) and calculation tolerance (in AMESimsolver) Additionally the number of internal maximum it-erations for a single time step was set in the FLUENT solverso that the dynamic simulation can converge at each timestep e outlet flow rate set by the PID controller was80000 Lmin To attain the desired value of the outlet flowrate the actuator of the control valve adjusted the openingand closing of the valve plug according to the output signalof the controller When the flow rate at the valve outletattained the target value the valve opening no longerchanged at a balanced position and the cosimulationachieved convergence
Figure 12 shows the dynamic curves of the valve plugdisplacement flow rate at the valve outlet fluid load anddriving force of the actuator acting on the valve plug andvalve stem during the dynamic change of the valve openingIn the first 7ms the fluid load acting on the valve plugexhibited an oscillating and unstable form whereas thedriving force of the actuator originally increased and thendecreased And the direction of these two forces changedduring this period of time When the valve plug displace-ment increased to the first peak value of 40mm the valveopening was approximately 36 In this process the flowrate at the valve outlet transformed from a sharp accelerationwith a large curve slope to a linear acceleration which wasrelated to the increase and decrease in the valve plug speedSubsequently the valve plug moved toward the closingdirection and the flow rate variation at the valve outletslowed down After exceeding 4 of the desired flow valuethe outlet flow rate gradually decreased Since the signaldifference received by the PID controller was not zero thevalve plug continued to adjust continuously and its dis-placement again exhibited several decaying fluctuationsEventually at time t 035 s the flow rate at the valve outletwas approximately 80000 Lmin e valve plug remained ata final opening of 30 with a very small fluctuation Si-multaneously the resultant force of the valve plug wasapproximately zero which indicated that the fluid load anddriving force of the actuator acting on the plug tended to bestable but there was a slight fluctuation
A warship environment is complex and changeableWith the leaping change in the shiprsquos working conditionswhen a warship implements many complicated actions oftactics and techniques the valve plug is subjected to randomand oscillating fluid loads in the process of dynamic ad-justment especially from t 0001 s to t 0005 s andt 0012 s to t 0016 s (see Figure 13) e resultant force ofthis fluid load and driving force of the actuator may be
Science and Technology of Nuclear Installations 7
greater or less than the actual adjustment force required bythe valve plug reducing the control precision of the controlvalve Furthermore oscillating fluid loads can cause vibra-tion noise and other hazards on the valve plug ereforethe oscillating fluid loads need to be compensated on de-mand to reduce the valve plug oscillation and improve thestability of the control valve
Figures 14 and 15 depict the pressure field and velocitydistributions in the valve chamber during the valve plugmovement For the period of the simulation the mostrepresentative time points were selected e pressure dis-tributions in Figure 14 show that the pressure of the flowchannel showed a decreasing trend from the pipeline inlet tothe pipeline outlet from t 0001 s to t 06 s In the orifice
region between the valve plug and valve seat the flow areawas limited and the pressure drop was large the pressuredrop primarily overcame the resistance of the flow channelin the control valve As the valve plug moved from the firstmaximum displacement (at time t 0007 s) to the closingdirection a low-pressure region was generated on the side ofthe valve plug and seat Along with the dynamic adjustmentof the valve opening this low-pressure region was contin-uously enlarged and moved away from the valve seat to thevalversquos downstream chamber for 0012 slt tlt 0090 s A partof the low-pressure region also appeared at the top of thevalve housing At t 06 s the valve plug has attainedequilibrium and the low-pressure region was gradually notapparent Moreover we observed that the upper end of the
Pres
sure
inle
t
Pres
sure
out
let
50mm20mm Valve plug
Figure 9 Grid model for verification
Water properties
UserCosim block used to handle dataexchanges between soware types
Mass used to compute the forcebalance on the valve spool
Spring
Spool_VelocityUserCosim
InterfaceAMESimFLUENT
Fluid_Force
Figure 10 AMESim model for validation
1290
1300
1310
1320
1330
1340
1350
Plug
disp
lace
men
t (m
m)
2010 150500Time (s)
FLUENT simulationCosimulation
(a)
ndash7
ndash5
ndash3
ndash1
1
3
5
7
Flui
d lo
ad (N
)
20151000 05Time (s)
FLUENT simulationCosimulation
(b)
Figure 11 Comparison of the results of the pure FLUENT simulation and FLUENTAMESim cosimulation (a) Displacement response(b) Fluid load acting on valve plug
8 Science and Technology of Nuclear Installations
times104
times104
times104
10
13
16
19
22
25
Flui
d lo
ad (N
)
120
125
130
135
140
145
0001 0002 0003 0004 0005
001000 003 004002 005Time (s)
00130012 00150014 0016200
205
210
215
220
Figure 13 Transient variation of fluid loads on plug surfaces
0010
0015
0020
0025
0030
0035
0040
0045
Plug
disp
lace
men
t (m
)
0502 0600 0401 03Time (s)
(a)
20000
30000
40000
50000
60000
70000
80000
90000
Volu
me fl
ow ra
te (L
min
)
0502 0600 0401 03Time (s)
(b)
ndash150000
ndash100000
ndash50000
0
50000
100000
150000
200000
250000
300000
Flui
d lo
ad (N
)
0502 0600 0401 03Time (s)
(c)
ndash150000
ndash50000
50000
150000
250000
350000
450000
Driv
ing
forc
e (N
)
0502 04 0600 01 03Time (s)
(d)
Figure 12 Cosimulation results for the valversquos dynamic variation versus time (a) Valve plug displacement (b) Volume flow rate at the valveoutlet (c) Fluid load on the valve plug (d) Driving force of the actuator
Science and Technology of Nuclear Installations 9
t = 0001s t = 0007s t = 0012s
t = 0028s t = 0046s t = 0066s
t = 0090s t = 0150s t = 0600s
Pressure (Pa) 70E + 06 74E + 06 78E + 06 82E + 06 86E + 06 90E + 06 94E + 06 98E + 06
Figure 14 Pressure field distributions at different times
t = 0001s t = 0007s t = 0012s
t = 0028s t = 0046s t = 0066s
t = 0090s t = 0150s t = 0600s
8075706560555045403530252015105Velocity (ms)
Figure 15 Velocity magnitude distributions at different times
10 Science and Technology of Nuclear Installations
valve plug was attached to a low-pressure region which wasprone to cavitation resulting in potential damage to thevalve plug
For the pressure field of t 0007 s the fluid pressure inthe valve cavity decreased from the bottom face to the upperface of the valve plug and the maximum pressure in thevicinity of the bottom of the valve plug was approximately98MPa In the subsequent 5ms the area occupied by thehigh-pressure region on the lower half surface of the valveplug gradually expanded at t 0012 s in particular thepressure in the partial region was approximately 10MPaReferring to the fluid load curve obtained by AMESimshown in Figure 13 the fluid load acting on the valve plugcontinuously increased within this period (from t 0007 s tot 0012 s) e main reason was that as the valve plugmoved toward the closing direction during this period theflow area of the orifice region became smaller and thepressure fluctuation in the valve cavity increased which leadto a larger area of the high-pressure region on the lowersurface of the plug On the other hand the fluid load on thevalve plug was obtained by integrating the surface area of thevalve plug with the pressure distribution on the upper andlower surfaces of the valve plug us the increase of thepressure difference between the lower and upper surfaces ofthe valve plug made the fluid load increase A similarphenomenon occurred in the period from t 0090 to0150 s erefore the calculation results of AMESim wereobserved to correspond with those of FLUENT
Figure 15 shows the sequence of the velocity magnitudecontours In the initial opening process of the valve plug fortlt 0005 s the flow area at the orifice was small e flowchannels were in a strong throttling state which caused thefluid pressure to decrease and the velocity to increase in theorifice region As the fluid accelerated through the narrowgap of the orifice the valve seat functioned as a throatresulting in a jet at t 0007 s that hit the valve plug at highvelocities After t 0012 s the valve plug moved toward theclosing direction and an asymmetric jet occurred at bothsides of the valve seat e asymmetric accelerating fluidcaused the hydraulic inductance owing to inertia It acted onthe surface of the valve plug and coupled with the movingvalve plug as well as the uneven pressure gradient in thisregion which were the main reasons for variable and os-cillating fluid loads on the valve plug (see Figure 13)
From Figure 16 the velocity of the jet region was higherthan that of the nearby fluid region when the fluid flowedthrough the orifice In the first 10ms the high-speed andlow-speed streams were mixed in the nearby regionresulting in a strong shear effect which caused the formationof vortices in the low-speed region Owing to the structuralobstruction vortices appeared on the left side and top wall ofthe valve body where the fluid stagnated and its velocitydecreased At t 0012 s vortex production at the lip of thevalve seat resulted in unsteady shedding and a large amountof energy was removed the phenomenon of vortex sheddingchanged the pressure distribution around the valve seat (seeFigure 14) which caused a sudden change in the fluid loadon the valve plug Furthermore the jet spread out further tothe valversquos downstream chamber which cannot avoid the
flow pathrsquos bend resulting in the formation of a recirculationregion as shown at t 0028 s is recirculation regionexpanded to the bottom of the downstream pipeline andoccupied the flow channel space Consequently the main-stream fluid was squeezed and its flow direction wasdisturbed
42 Dynamic Studies Related to Different Valve Plugs Tofurther explore the dynamic performance of the controlvalve plug we changed the shape of the valve plug eprofile curves of two other valve plugs with the flow char-acteristics of quick-opening and equal percentage weredesigned according to the calculation formula of the in-herent flow characteristic [20 21] and the cosimulations forthese two valves were conducted During the simulationprocess the initial opening percentage of the valve plugdesired flow rate at valve outlet boundary conditions andsolution parameters were unchanged e simulation resultswere as follows
Figure 17 shows the variation in fluid loads on the valveplug under different plug shapes By comparison we ob-served that in the first 1ms the fluid load acting on the equalpercentage plug exhibited high-frequency oscillations alongthe horizontal axis which was far greater than that of thefluid load acting on the other two types of valve plugserefore more load compensation was needed for the equalpercentage plug in this time period e oscillation trend ofthe unstable fluid loads acting on the quick-opening plugwas similar to that of the linear plug which was charac-terized by irregular and pulse-like fluctuations and itsfluctuation amplitude was larger than that of the linear plugAs the valve opening increased the amplitude attenuation ofthe fluid load acting on the linear plug was the fastest eoscillating fluid loads experienced by three different types ofvalve plugs gradually decreased and then fluctuated within asmall range When the valve plug attained equilibrium thefluid load acting on the quick-opening plug was the largestwhereas the equal percentage plug was the smallest whichdiffers by approximately 13 times as shown in Table 2
Figure 18 shows the dynamic change in the flow rate atthe valve outlet As the initial displacement of the valve plugincreased the outlet flow rate for the control valve with theflow characteristic of equal percentage fluctuated signifi-cantly within 1mse flow behavior was consistent with thehigh-frequency oscillating fluid loads (Figure 17) the largerthe flow fluctuation the greater the oscillating amplitude ofthe fluid load on the valve plug is process produced animpulsive force on the valve plug which would causestructural failure When the outlet flow rate for the threecontrol valves with different flow characteristics tended tothe desired value all the valve plugs were balanced to achievethe goal of controlling the flow rate behind the valve
Figure 19 shows the flow curves when three controlvalves were in a stable state We observed that the outlet flowrate for every control valve was approximate to the targetvalue but it had a certain deviation from the desired valueand the deviation degree was less than 001 as shown inTable 3 In combination with the actual situation the valve
Science and Technology of Nuclear Installations 11
could not completely maintain the desired value because offactors such as its own structure and external interferenceduring the working process erefore this result suggestedthat after three types of control valves with flow charac-teristics of equal percentage quick-opening and linearattained equilibrium their outlet flow rate value with thedesired value had slight differences
On the other hand although the valve plug was balancedthe flow rate at the valve outlet still exhibited slight fluc-tuations near the desired value To compare the stability timeof different valve plugs we analyzed how fast the outlet flowrate stabilizes for each valve plug considering a deviation of01 (within the engineering allowable range) as the stabilitycriterion In other words when the outlet flow rate becameand remained in the range of 79920ndash80080 Lmin it wasconsidered to have attained stability Figure 19 and Table 3show that the outlet flow of the control valve with the flowcharacteristic of equal percentage was the first to attain therange of this zone and its stability time was the shortest Incontrast the control valve with the flow characteristic ofquick-opening lagged behind the other two valves
In summary when a certain pressure is given at the inletand outlet of the control valve (in this study the inlet andoutlet pressures were 10 and 8MPa respectively) the valveplug moves from a 10 opening to the balance position tocontrol the flow behind the valve e stability time of thecontrol valve with the flow characteristic of equal percentageis fast but this valve plug is subjected to sharply rapidlyoscillating fluid loads in the movement process the quick-opening valve plug takes a long time to attain stability andthe fluid load acting on the plug is large in the balanceposition e fluctuation amplitude of the fluid load appliedto the linear valve plug is relatively low and the damage tothis valve plug is small In practice the selection and design
t = 0001s
t = 0012s
t = 0066s
t = 0150s
t = 0007s
t = 0028s
t = 0090s
t = 0600s
8075706560555045403530252015105Velocity (ms)
Figure 16 Streamlines at different simulation times
times104
ndash5
0
5
10
15
20
25
30
Flui
d lo
ad (N
)
007 008003 006005004002001000Time (s)
times10ndash4
times106
ndash25ndash20ndash15ndash10
ndash505
2 864 100
LinearQuick-openingEqual percentage
Figure 17 Transient variation of fluid loads on different plugsurfaces
Table 2 Fluid load difference at the balance position for differentvalve plugs
e fluid loadon the plug Linear Quick-opening Equal percentage
At the balanceposition (N) 207867 223922 171488
12 Science and Technology of Nuclear Installations
requirements for the control valve plug are different owingto different working environments For example wheninvolving the high-security region on the warship thecontrol valve is required to respond rapidly in an emergencyto achieve rapid regulation erefore the valve plugrsquos
stability time is the focus and the valve plug with faststability time should be selected For control valves that workfrequently the valve plug is constantly in the process ofdynamic adjustment so we should choose the valve plugwith a smaller fluctuation amplitude of the fluid load
5 Conclusion
Based on the FSI a cosimulation for the mechanical-electric-fluid system of the control valve was performed using theFLUENT and AMESim platforms e interaction effectbetween the valve components and fluid flow was com-prehensively considered rough the coupling calculationand data exchange of the two software the opening curve ofthe control valve in the dynamic adjustment process wasobtained e UDF and dynamic mesh technology were alsoused to solve the problem of instantaneous changes in thecalculation region caused by the valve plug movement
Compared with the pure simulations this study per-formed a synchronous analysis of the unsteady flow fieldcharacteristics in the valve cavity and the dynamic responseof the actuator As the valve plug dynamically moved aplurality of low-pressure zones of different sizes appeared inthe valve chamber because of the FSI effect e jet flowformed by the asymmetric high-speed fluid near the valveseat area was accompanied by the vortex shedding phe-nomenon Moreover we observed that the valve plug surfacewas subjected to unstable and oscillating fluid loads whicheasily caused the valve plug to vibrate ese dynamicsimulation results can give theoretical guidance for accu-rately compensating the additional fluid load on the valveplug
e behavior of the control valve with different flowcharacteristics was compared by changing the valve plugshape For inlet and outlet pressures of the control valve of10 and 8MPa respectively the valve plug beginning to movefrom the 10 opening position the results indicated that thecontrol valve with the flow characteristic of equal percentagewas sensitive to the effect of the fluid flowe fluctuation inthe flow rate at this valve outlet and the oscillation of thefluid load acting on this valve plug were high for a smallopening exceeding those of the control valves with the flowcharacteristics of quick-opening and linear And more loadcompensation was required for the equal percentage plug Inaddition the control valve with the flow characteristic ofequal percentage was the first to attain equilibrium with thefastest stability time whereas the control valve with the flowcharacteristic of quick-opening was the slowest When thecontrol valve was stable the deviation between the outletflow rate value and the desired value for every type of controlvalve with three different flow characteristics was negligible
times104
0
1
2
3
4
5
6
7
8
9
10
Volu
me fl
ow ra
te (L
min
)
006 008002 004000Time (s)
times10ndash4
times104
150 105 2030354045505560
LinearQuick-openingEqual percentage
Figure 18 Outlet flow rate of the control valve corresponding todifferent plugs
times104
2
3
4
5
6
7
8
9
Volu
me fl
ow ra
te (L
min
)
01 04 0600 02 0503Time (s)
79920
80080
80000
80003
060504030201
LinearQuick-openingEqual percentage
Figure 19 Outlet flow rate of the control valve corresponding todifferent plugs in the balance position
Table 3 Flow rate difference in stable value and stable time fordifferent valve plugs
e flow rate atvalve outlet Linear Quick-opening Equal
percentageStable value (Lmin) 8000085 8000115 8000183Stability time (s) 0198 0245 0187
Science and Technology of Nuclear Installations 13
Owing to the various types of warship control valves theoperating characteristics of the valves should be completelymastered according to the actual working environmentswhen selecting them is study provides a new insightscheme on the dynamic analysis and performance evaluationin control valves e results are significant to reduce thefailure rate of the warship control valve improve the controlaccuracy and prolong the life of the valve
Data Availability
e data used to support the findings of this study are in-cluded within the article
Conflicts of Interest
e authors declare no conflicts of interest
Acknowledgments
is research was funded by the National Natural ScienceFoundation of China (Grant nos 51775310 and 51875316) theKey Research and Development Project of Shandong Province(Grant no 2019GHY112052) the Natural Science Foundationof Shandong Province (Grant no ZR2019MEE025) the Na-tional Key Research and Development Project of China (Grantno 2016YFD0701104) and the Project for Scientific ResearchInnovation Team of Young Scholar in Colleges and Univer-sities of Shandong Province (Grant no 2020KJB001)
References
[1] V Ahuja A Hosangadi P Cavallo and R Daines ldquoAnalysesof transient events in complex valve and feed systemsrdquo inProceedings Of the 41st AIAAASMESAEASEE Joint Pro-pulsion Conference And Exhibit pp 1ndash13 Tucson AZ USAJuly 2005
[2] P A Cavallo A Hosangadi and V Ahuja ldquoTransient sim-ulations of valve motion in cryogenic systemsrdquo in ProceedingsOf the 35th AIAA Fluid Dynamics Conference And Exhibitpp 1ndash11 Toronto Ontario Canada June 2005
[3] J Shipman A Hosangadi and V Ahuja ldquoUnsteady analysesof valve systems in rocket engine testing environmentsrdquo inProceedings Of the 40th AIAAASMESAEASEE Joint Pro-pulsion Conference And Exhibit pp 1ndash10 Fort LauderdaleFlorida USA July 2004
[4] B K Saha H Chattopadhyay P B Mandal andT Gangopadhyay ldquoDynamic simulation of a pressure regu-lating and shut-off valverdquo Computers amp Fluids vol 101pp 233ndash240 2014
[5] A Beune J G M Kuerten and M P C van Heumen ldquoCFDanalysis with fluid-structure interaction of opening high-pressure safety valvesrdquo Computers amp Fluids vol 64 no 3pp 108ndash116 2012
[6] R Morita F Inada M Mori K Tezuka and Y TsujimotoldquoCFD simulations and experiments of flow fluctuationsaround a steam control valverdquo Journal of Fluids Engineeringvol 129 no 1 pp 48ndash54 2007
[7] A Misra K Behdinan and W L Cleghorn ldquoSelf-excitedvibration of a control valve due to fluid-structure interactionrdquoJournal of Fluids and Structures vol 16 no 5 pp 649ndash6652002
[8] K Yonezawa R Ogawa K Ogi et al ldquoFlow-induced vibrationof a steam control valverdquo Journal of Fluids and Structuresvol 35 no 776 pp 76ndash88 2012
[9] C Bolin and A Engeda ldquoAnalysis of flow-induced instabilityin a redesigned steam control valverdquo Applied ermal En-gineering vol 83 pp 40ndash47 2015
[10] G Palau-Salvador P Gonzalez-Altozano and J Arviza-Valverde ldquoree-dimensional modeling and geometricalinfluence on the hydraulic performance of a control valverdquoJournal of Fluids Engineering vol 130 no 1 pp 151ndash1632008
[11] Y Xie Y Wang Y Liu F Cao and Y Pan ldquoUnsteadyanalyses of a control valve due to fluid-structure couplingrdquoMathematical Problems in Engineering vol 2013 Article ID174731 7 pages 2013
[12] J Tecza G Chochua and R Moll ldquoAnalysis of fluid-structureinteraction in a steam turbine throttle valverdquo in ProceedingsOf the ASME Turbo Expo Power for Land Sea and Airpp 2329ndash2338 Glasgow UK June 2010
[13] X Sun X Li Z Zheng and D Huang ldquoFluid-structure in-teraction analysis of a high-pressure regulating valve of a 600-MW ultra-supercritical steam turbinerdquo Proceedings of theInstitution of Mechanical Engineers Part A Journal of Powerand Energy vol 229 no 3 pp 270ndash279 2015
[14] H Wang M-j Peng Y-k Liu S-w Liu R-y Xu andH Saeed ldquoRemaining useful life prediction techniques ofelectric valves for nuclear power plants with convolutionkernel and LSTMrdquo Science and Technology of Nuclear In-stallations vol 2020 pp 1ndash13 2020
[15] R Fadaeinedjad M Moallem and G Moschopoulos ldquoSim-ulation of a wind turbine with doubly fed induction generatorby FAST and Simulinkrdquo IEEE Transactions on Energy Con-version vol 23 no 2 pp 690ndash700 2008
[16] R Zhang K P Lam S-c Yao and Y Zhang ldquoCoupledEnergyPlus and Computational Fluid Dynamics Simulationfor Natural Ventilationrdquo Building and Environment vol 68pp 100ndash113 2013
[17] T Kerh J J Lee and L C Wellford ldquoTransient fluid-structure interaction in a control valverdquo Journal of FluidsEngineering vol 119 no 2 pp 354ndash359 1997
[18] R Messahel C Regan M H Souli and C Ruiu ldquoNumericalinvestigation of homogeneous equilibrium model and fluid-structure interaction for multiphase water flows in pipesrdquoInternational Journal of Multiphase Flow vol 98 pp 56ndash662018
[19] LMS LMS ImagineLab AMESim Generic Co-simulation Rev13 Userrsquos Guide Roanne France 2013
[20] Emerson Electric Co Control Valve Handbook Lowa USA2005
[21] B Fitzgerald Control Valves for the Chemical Process In-dustries McGraw-Hill New York NY USA 1995
[22] V Yakhot and S A Orszag ldquoRenormalization group analysisof turbulence I Basic eoryrdquo Journal of Scientific Com-puting vol 1 no 1 pp 3ndash51 1986
[23] L Wang J Cui and K Yao ldquoNumerical simulation and analysisof gas flow field in serrated valve columnrdquo Chinese Journal ofChemical Engineering vol 16 no 4 pp 541ndash546 2008
[24] J-Y Qian Z-X Gao J-K Wang and Z-J Jin ldquoExperimentaland numerical analysis of spring stiffness on flow and valvecore movement in pilot control globe valverdquo InternationalJournal of Hydrogen Energy vol 42 no 27 pp 17192ndash172012017
14 Science and Technology of Nuclear Installations

define the linear and angular velocities about the center ofgravity of a solid body with time) or an unprescribed motionwhere the subsequent motion was determined based on thesolution at the current time (for example the linear andangular velocities were computed from the force balance ona solid body) In order to apply the dynamic mesh model astarting volume mesh and the description of the motion ofmoving zones should be provided FLUENT provided threedynamic mesh motion methods to update the mesh in themoving zone which were smoothing layering andremeshing methods
32 AMESimModel for the Cosimulation e cosimulationmodel was built on the AMESim system (see Figure 4) emodel is divided into two parts the data exchange moduleand integrated model of the control valvee data exchangemodule called the UserCosim interface was used to set theexchanged variablese left side of the UserCosim interfacewas the variables calculated by AMESim and provided toFLUENT and the right side was the variables calculated byFLUENT and sent to AMESim Every variable appeared inpairs and was correlated with each other using the receiverand transmitter submodels And submodels with the samecolor belong to the same variable A receiver submodel canbe used to receive a variable from a transmitter submodelwithout any visible connection on the sketch In otherwords the receiver output was actually a duplicate of thetransmitter input All the exchanged variables on theboundary of the two software are presented in Figure 5 eintegrated model was composed of the control-valve flowfield regulating mechanism actuator and control system InAMESim the flow field was represented by inlet and outlet
pressure sources which were built using fluid models fromthe hydraulic library for flow boundary conditions eworking fluid was liquid water with a density of 9982 kgm3and dynamic viscosity of 0001003 kg(mmiddots) e regulatingmechanism and the actuator were represented by a massrack pinion reducer gear and motor which were builtfrom the mechanical library e function of the electricalmotor was to convert the output signal of the controller intothe thrust or torque of the valve e function of the gearreducer rack and pinion was to convert the thrust or torqueinto the displacement e regulating mechanism wascomposed of the valve plug and stem which were repre-sented by a mass block And a displacement sensor wasconnected next to the mass block to obtain the valve plugdisplacemente function of the regulating mechanismwasto change the flow area of the valve according to the dis-placement signal e control system was represented by aproportional-integral-differential (PID) controller and aseries of sensors which were built using electric signalmodels to link the control units and physical sensors Herethe sensor used a flowmeter which was installed on thedownstream pipeline of the control valve to monitor thevalve outlet flow and connected with the PID controller toform a flow feedback system e comparison elementcompared the feedback signal output by the flowmeter withthe target value signal to obtain the deviation signal enthe controller calculated the deviation signal and transmittedthe results to the actuatore initial parameters of each partof the model are listed in Table 1
In the AMESim to FLUENT direction when the cosi-mulation was launched AMESim provided the pressuresource values of the valve inlet and outlet as boundaryconditions for FLUENT e PID controlled the motor
AMESimmodel
AMESim DLL
Slave MasterMedium
AMESimsolver
FLUENTmodel
FLUENT UDF
FLUENTsolverMicroso visual studio
UserCosim InterfaceAMESimFLUENT
Figure 2 Schematic of the cosimulation platform
CALL CALL CALL
ReturnReturnReturn
FLUENT
AMESim
ΔtΔtΔt
Δt Δt Δt
Figure 3 Cosimulation time principle
4 Science and Technology of Nuclear Installations
operation according to the flowmeter measurement pro-vided by FLUENT to adjust the valve opening and closing tomaintain the actual flow rate close to the desired flow rateMeanwhile AMESim calculated the force balance on thevalve plug during the opening and closing of the controlvalve based on Equation (3) Subsequently the displacementof the valve plug resulting from the force balance calculationin AMESim was fed back to FLUENT to enable it to updatethe valve plug position and the dynamic mesh around thevalve
33 FLUENT Model for the Cosimulation
331 Parameter Settings of the Numerical Approach inFLUENT For the CFD simulation model of the controlvalve the profile curve of the valve plug was designedaccording to the formula of linear inherent flow charac-teristics [20 21] e front and rear pipelines of the valvewere lengthened twice and six times respectively compared
with the pipe diameter to ensure sufficient fluid flow egrid was generated using ANSYS ICEM An unstructuredgrid was used to mesh the entire flow field and the gridaround the valve seat and plug was refined Before selectingthe final cell number a grid independence study was per-formed with several types of computational cells Figure 6shows that the flow rate at the valve outlet varied withdifferent grid numbers When the grid number was 120000the flow rate did not change significantly To save compu-tation time we adopted this grid scheme Similarly the timestep was selected to be 10minus5s and the number of internalmaximum iterations for a single time step was 300 afterseveral levels of tests Here the dynamic parameters of thecontrol valve no longer produced a further change with thevariation in the time step Figure 7 shows the grid model ofthe control valve with a 10 opening e grid size wasapproximately 120000 cells
e simulation was carried out in software ANSYSFLUENT 170 the RNG turbulence k-ε model was adopted[22 23]e flowing fluid inside the valve was liquid water asthe same as AMESim All the walls were assumed to have noslip Pressure boundary conditions defined by the UDF wereapplied to the inlet and outlet of the control valve Duringtransient valve flow the valve plug and stem moved insidethe valve body e boundary surface of the valve plug andstem was defined as the dynamic mesh zones in the dynamicmesh setting e motion type of the dynamic zones wasrigid body motion which was an option available inFLUENT Mesh around the dynamic regions needs to bedefined to accommodate valve plug and stem motionSmoothing and remeshing were employed for this meshdefinitione displacement of the valve plug received fromAMESim was defined in the UDF And it can be read by themacro ldquoDEFINE_CG_MOTION()rdquo from FLUENT to re-generate the mesh A segregated solver was used and thePISO algorithm was applied to the coupling of pressure andvelocity And second-order upwind scheme was used for alldiscrete terms In the transmit simulation under relaxationfactors have an important influence on the convergence ofthe simulation Here the pressure the density the bodyforces k ε and the turbulent viscosity were set as 03 1 107 08 and 1 respectively When the residuals were less
Table 1 Nominal parameters of the AMESim model
Part Parameter Unit ValueControl valve Inlet pressure resource MPa 10Control valve Outlet pressure resource MPa 8Rack Pinion diameter mm 30Gear Large diameter mm 100Gear Small diameter mm 50PID controller Proportional gain mdash 80PID controller Integral gain mdash 1PID controller Derivative gain mdash 0Constant signal Desired flow rate Lmin 80000Mass Quality kg 10
Cosimulation = + +
AMESim-Fluent Cosimulation of a control valve
UserCosim block used to handle dataexchanges between softwares
Gear
ReducerTransmitter
Flowmeter used to monitorvalve outlet flow rate
Rack and pinion
Mass used to compute the forcebalance on the valve spool
ReceiverWater properties
Inlet pressure source Outlet pressure source
Electrical motor used to convert the outputsignal of the PID controller into a rotary signal
PID controler used to calculate the deviationsignal and transmit the results to the actuator
Constant signal used to seta target flow rate value
Comparison element used to completethe subtraction between the constant
signal and the feedback signal to obtainthe deviation signal
Fluid(flow field)
Mechanical(regulating mechanism and actuator)
Electric(control system)
Figure 4 Modified the AMESim model for cosimulation
Fluid load Inletoutletflow rate
Inletoutletpressure
Valve displacementand velocity
FLUENT AMESim
Figure 5 Exchanged variables between two solvers
Science and Technology of Nuclear Installations 5
than 10minus7 for continuity and 10minus6 for other parameters thesimulated flow field was considered to have attained theconvergence criterion
In the FLUENT to AMESim direction when the cosi-mulation was launched FLUENTcalculated the flow aroundthe valve plug based on Equations (1) and (2) and then thevalue of the fluid load on the valve plug due to this flow aswell as the value of the inlet and outlet flow rate was sent toAMESim e movement area of the valve plug was con-trolled using dynamic mesh technology Ultimately dataexchange and coupling occurred between the codes ofAMESim and FLUENT
332 FLUENT Validation In order to prove the reliabilityof the parameter settings and the solution scheme in theFLUENT simulation a comparison validation was per-formed with the results of Qian et al[24] e model wasbased on a pilot-control globe valve and simulated in ANSYSFLUENT 170 maintaining all the parameter settings thesame as those of Qian et al [24] Figure 8 shows the steadyvalve plug displacement for our computational results andexperimental results of Qian et al[24] e trends of thesimulation results and experimental results were within anacceptable range is demonstrated the feasibility of thepure FLUENT simulation and validated the numerical set-tings used for the simulation of the valve in this study
34 Verification for the Coupled Scheme Due to the limi-tation of the experimental conditions we conducted theverification of the coupled scheme by comparing the resultsbetween the pure FLUENT simulation and the FLUENT
Pres
sure
inle
t
Pres
sure
out
let
200mm 200mm
Figure 7 Modified FLUENT grid model of fluid zones of the control valve
6 16 1810 122 84 14Cell number (104)
25200
25300
25400
25500
25600
25700
25800
25900
Out
let fl
ow ra
te (L
min
)
Figure 6 Flow rate under different computational cells
02468
101214161820222426
Stea
dy v
alve
plu
g di
spla
cem
ent (
mm
)
00 01 05 06 080702 0403Inlet pressure (MPa)
Quian et al (k = 5100Nm)Current study (k = 5100Nm)
Qian et al (k = 7700Nm)Current study (k = 7700Nm)
Figure 8 Comparison of the results of the current study and thoseof Qian et al[24]
6 Science and Technology of Nuclear Installations
AMESim cosimulation with the same parametersemodelwas based on a simplified spring-loaded check valve egoverning equation for this motion of the valve is expressedas follows
Fprime(t) kX(t) + Ffprime + mprime euroX (t) Ff
prime c _X(t)1113966 (4)
where Fprime(t) is the fluid load on the valve plug X(t) _X(t)and euroX(t) are the displacement velocity and acceleration ofthe valve plug respectively k is the stiffness of the spring mprimeis the mass of the valve plug c is the equivalent viscousdamping coefficient and the friction force of the valve plugFfprime is also equivalent to a viscous damping force which is
proportional to the speed of the valve plugIn the pure FLUENT simulation the valve plug motion
was solved using an iterative scheme based on the classicalRunge-Kutta method When the number of iteration timesteps was zero the valve was in a static statee accelerationof the valve plug euroX
n(t) at n time steps was calculated by
using the following equation
euroXn
(t) Fprimen(t) minus kX
n(t) minus c _X
n(t)
mprime (5)
where Fprimen(t) is the fluid load on the valve plug Xn(t) is thedisplacement of the valve plug and _X
n(t) is the velocity of
the valve plug at n number of time stepsen the displacement Xn+1(t) and velocity _X
n+1(t) of
the valve plug motion at the next number of time steps n + 1become
Xn+1
(t) Xn(t) + _X
n(t)Δt +
12
euroXn(t)Δt2
_Xn+1
(t) _Xn(t) + euroX
n(t)Δt
(6)
where Δt is the time stepe UDF was compiled to achieve the iteration scheme
and it was loaded into the FLUENT solver to control themovement of the valve plug More detailed settings andinformation related to the grid independence study and theselection of the time step for FLUENT calculations arediscussed in Section 33 e final grid model of the checkvalve is shown in Figure 9
In the FLUENTAMESim cosimulation a cosimulationmodel for the data exchange module and the spring systemwas established in the AMESim solver as shown in Fig-ure 10 e valve plug was represented by a mass For theexchanged variables between the two solvers FLUENTcalculated the fluid load on the valve plug based on Equa-tions (1) and (2) is fluid load was input to AMESim tosimulate the spring system based on Equation (4) efeedback on the velocity of the valve plug from AMESimwas in turn delivered to FLUENT to update the valve plugposition for the next iteration
Figure 11 shows a comparison of the results of thedisplacement response and fluid load on the valve plugbetween the pure FLUENT simulation and FLUENTAMESim cosimulation with the same parameters A goodagreement was observed which demonstrated the feasibilityof the coupled scheme
4 Results
41 Dynamic Studies Related to Valve Timing In the initialsimulation status the inlet and outlet pressures of thecontrol valve were 10 and 8MPa respectively Meanwhilethe valve opening was maintained at 10 First a steadysimulation using FLUENT was conducted to obtain a stableflow field and the flow rate at the valve outlet was 25820 Lmin en the cosimulation was performed for transientcalculation under the condition of setting the same time step(in AMESim and FLUENT solvers) residual accuracy (inFLUENT solver) and calculation tolerance (in AMESimsolver) Additionally the number of internal maximum it-erations for a single time step was set in the FLUENT solverso that the dynamic simulation can converge at each timestep e outlet flow rate set by the PID controller was80000 Lmin To attain the desired value of the outlet flowrate the actuator of the control valve adjusted the openingand closing of the valve plug according to the output signalof the controller When the flow rate at the valve outletattained the target value the valve opening no longerchanged at a balanced position and the cosimulationachieved convergence
Figure 12 shows the dynamic curves of the valve plugdisplacement flow rate at the valve outlet fluid load anddriving force of the actuator acting on the valve plug andvalve stem during the dynamic change of the valve openingIn the first 7ms the fluid load acting on the valve plugexhibited an oscillating and unstable form whereas thedriving force of the actuator originally increased and thendecreased And the direction of these two forces changedduring this period of time When the valve plug displace-ment increased to the first peak value of 40mm the valveopening was approximately 36 In this process the flowrate at the valve outlet transformed from a sharp accelerationwith a large curve slope to a linear acceleration which wasrelated to the increase and decrease in the valve plug speedSubsequently the valve plug moved toward the closingdirection and the flow rate variation at the valve outletslowed down After exceeding 4 of the desired flow valuethe outlet flow rate gradually decreased Since the signaldifference received by the PID controller was not zero thevalve plug continued to adjust continuously and its dis-placement again exhibited several decaying fluctuationsEventually at time t 035 s the flow rate at the valve outletwas approximately 80000 Lmin e valve plug remained ata final opening of 30 with a very small fluctuation Si-multaneously the resultant force of the valve plug wasapproximately zero which indicated that the fluid load anddriving force of the actuator acting on the plug tended to bestable but there was a slight fluctuation
A warship environment is complex and changeableWith the leaping change in the shiprsquos working conditionswhen a warship implements many complicated actions oftactics and techniques the valve plug is subjected to randomand oscillating fluid loads in the process of dynamic ad-justment especially from t 0001 s to t 0005 s andt 0012 s to t 0016 s (see Figure 13) e resultant force ofthis fluid load and driving force of the actuator may be
Science and Technology of Nuclear Installations 7
greater or less than the actual adjustment force required bythe valve plug reducing the control precision of the controlvalve Furthermore oscillating fluid loads can cause vibra-tion noise and other hazards on the valve plug ereforethe oscillating fluid loads need to be compensated on de-mand to reduce the valve plug oscillation and improve thestability of the control valve
Figures 14 and 15 depict the pressure field and velocitydistributions in the valve chamber during the valve plugmovement For the period of the simulation the mostrepresentative time points were selected e pressure dis-tributions in Figure 14 show that the pressure of the flowchannel showed a decreasing trend from the pipeline inlet tothe pipeline outlet from t 0001 s to t 06 s In the orifice
region between the valve plug and valve seat the flow areawas limited and the pressure drop was large the pressuredrop primarily overcame the resistance of the flow channelin the control valve As the valve plug moved from the firstmaximum displacement (at time t 0007 s) to the closingdirection a low-pressure region was generated on the side ofthe valve plug and seat Along with the dynamic adjustmentof the valve opening this low-pressure region was contin-uously enlarged and moved away from the valve seat to thevalversquos downstream chamber for 0012 slt tlt 0090 s A partof the low-pressure region also appeared at the top of thevalve housing At t 06 s the valve plug has attainedequilibrium and the low-pressure region was gradually notapparent Moreover we observed that the upper end of the
Pres
sure
inle
t
Pres
sure
out
let
50mm20mm Valve plug
Figure 9 Grid model for verification
Water properties
UserCosim block used to handle dataexchanges between soware types
Mass used to compute the forcebalance on the valve spool
Spring
Spool_VelocityUserCosim
InterfaceAMESimFLUENT
Fluid_Force
Figure 10 AMESim model for validation
1290
1300
1310
1320
1330
1340
1350
Plug
disp
lace
men
t (m
m)
2010 150500Time (s)
FLUENT simulationCosimulation
(a)
ndash7
ndash5
ndash3
ndash1
1
3
5
7
Flui
d lo
ad (N
)
20151000 05Time (s)
FLUENT simulationCosimulation
(b)
Figure 11 Comparison of the results of the pure FLUENT simulation and FLUENTAMESim cosimulation (a) Displacement response(b) Fluid load acting on valve plug
8 Science and Technology of Nuclear Installations
times104
times104
times104
10
13
16
19
22
25
Flui
d lo
ad (N
)
120
125
130
135
140
145
0001 0002 0003 0004 0005
001000 003 004002 005Time (s)
00130012 00150014 0016200
205
210
215
220
Figure 13 Transient variation of fluid loads on plug surfaces
0010
0015
0020
0025
0030
0035
0040
0045
Plug
disp
lace
men
t (m
)
0502 0600 0401 03Time (s)
(a)
20000
30000
40000
50000
60000
70000
80000
90000
Volu
me fl
ow ra
te (L
min
)
0502 0600 0401 03Time (s)
(b)
ndash150000
ndash100000
ndash50000
0
50000
100000
150000
200000
250000
300000
Flui
d lo
ad (N
)
0502 0600 0401 03Time (s)
(c)
ndash150000
ndash50000
50000
150000
250000
350000
450000
Driv
ing
forc
e (N
)
0502 04 0600 01 03Time (s)
(d)
Figure 12 Cosimulation results for the valversquos dynamic variation versus time (a) Valve plug displacement (b) Volume flow rate at the valveoutlet (c) Fluid load on the valve plug (d) Driving force of the actuator
Science and Technology of Nuclear Installations 9
t = 0001s t = 0007s t = 0012s
t = 0028s t = 0046s t = 0066s
t = 0090s t = 0150s t = 0600s
Pressure (Pa) 70E + 06 74E + 06 78E + 06 82E + 06 86E + 06 90E + 06 94E + 06 98E + 06
Figure 14 Pressure field distributions at different times
t = 0001s t = 0007s t = 0012s
t = 0028s t = 0046s t = 0066s
t = 0090s t = 0150s t = 0600s
8075706560555045403530252015105Velocity (ms)
Figure 15 Velocity magnitude distributions at different times
10 Science and Technology of Nuclear Installations
valve plug was attached to a low-pressure region which wasprone to cavitation resulting in potential damage to thevalve plug
For the pressure field of t 0007 s the fluid pressure inthe valve cavity decreased from the bottom face to the upperface of the valve plug and the maximum pressure in thevicinity of the bottom of the valve plug was approximately98MPa In the subsequent 5ms the area occupied by thehigh-pressure region on the lower half surface of the valveplug gradually expanded at t 0012 s in particular thepressure in the partial region was approximately 10MPaReferring to the fluid load curve obtained by AMESimshown in Figure 13 the fluid load acting on the valve plugcontinuously increased within this period (from t 0007 s tot 0012 s) e main reason was that as the valve plugmoved toward the closing direction during this period theflow area of the orifice region became smaller and thepressure fluctuation in the valve cavity increased which leadto a larger area of the high-pressure region on the lowersurface of the plug On the other hand the fluid load on thevalve plug was obtained by integrating the surface area of thevalve plug with the pressure distribution on the upper andlower surfaces of the valve plug us the increase of thepressure difference between the lower and upper surfaces ofthe valve plug made the fluid load increase A similarphenomenon occurred in the period from t 0090 to0150 s erefore the calculation results of AMESim wereobserved to correspond with those of FLUENT
Figure 15 shows the sequence of the velocity magnitudecontours In the initial opening process of the valve plug fortlt 0005 s the flow area at the orifice was small e flowchannels were in a strong throttling state which caused thefluid pressure to decrease and the velocity to increase in theorifice region As the fluid accelerated through the narrowgap of the orifice the valve seat functioned as a throatresulting in a jet at t 0007 s that hit the valve plug at highvelocities After t 0012 s the valve plug moved toward theclosing direction and an asymmetric jet occurred at bothsides of the valve seat e asymmetric accelerating fluidcaused the hydraulic inductance owing to inertia It acted onthe surface of the valve plug and coupled with the movingvalve plug as well as the uneven pressure gradient in thisregion which were the main reasons for variable and os-cillating fluid loads on the valve plug (see Figure 13)
From Figure 16 the velocity of the jet region was higherthan that of the nearby fluid region when the fluid flowedthrough the orifice In the first 10ms the high-speed andlow-speed streams were mixed in the nearby regionresulting in a strong shear effect which caused the formationof vortices in the low-speed region Owing to the structuralobstruction vortices appeared on the left side and top wall ofthe valve body where the fluid stagnated and its velocitydecreased At t 0012 s vortex production at the lip of thevalve seat resulted in unsteady shedding and a large amountof energy was removed the phenomenon of vortex sheddingchanged the pressure distribution around the valve seat (seeFigure 14) which caused a sudden change in the fluid loadon the valve plug Furthermore the jet spread out further tothe valversquos downstream chamber which cannot avoid the
flow pathrsquos bend resulting in the formation of a recirculationregion as shown at t 0028 s is recirculation regionexpanded to the bottom of the downstream pipeline andoccupied the flow channel space Consequently the main-stream fluid was squeezed and its flow direction wasdisturbed
42 Dynamic Studies Related to Different Valve Plugs Tofurther explore the dynamic performance of the controlvalve plug we changed the shape of the valve plug eprofile curves of two other valve plugs with the flow char-acteristics of quick-opening and equal percentage weredesigned according to the calculation formula of the in-herent flow characteristic [20 21] and the cosimulations forthese two valves were conducted During the simulationprocess the initial opening percentage of the valve plugdesired flow rate at valve outlet boundary conditions andsolution parameters were unchanged e simulation resultswere as follows
Figure 17 shows the variation in fluid loads on the valveplug under different plug shapes By comparison we ob-served that in the first 1ms the fluid load acting on the equalpercentage plug exhibited high-frequency oscillations alongthe horizontal axis which was far greater than that of thefluid load acting on the other two types of valve plugserefore more load compensation was needed for the equalpercentage plug in this time period e oscillation trend ofthe unstable fluid loads acting on the quick-opening plugwas similar to that of the linear plug which was charac-terized by irregular and pulse-like fluctuations and itsfluctuation amplitude was larger than that of the linear plugAs the valve opening increased the amplitude attenuation ofthe fluid load acting on the linear plug was the fastest eoscillating fluid loads experienced by three different types ofvalve plugs gradually decreased and then fluctuated within asmall range When the valve plug attained equilibrium thefluid load acting on the quick-opening plug was the largestwhereas the equal percentage plug was the smallest whichdiffers by approximately 13 times as shown in Table 2
Figure 18 shows the dynamic change in the flow rate atthe valve outlet As the initial displacement of the valve plugincreased the outlet flow rate for the control valve with theflow characteristic of equal percentage fluctuated signifi-cantly within 1mse flow behavior was consistent with thehigh-frequency oscillating fluid loads (Figure 17) the largerthe flow fluctuation the greater the oscillating amplitude ofthe fluid load on the valve plug is process produced animpulsive force on the valve plug which would causestructural failure When the outlet flow rate for the threecontrol valves with different flow characteristics tended tothe desired value all the valve plugs were balanced to achievethe goal of controlling the flow rate behind the valve
Figure 19 shows the flow curves when three controlvalves were in a stable state We observed that the outlet flowrate for every control valve was approximate to the targetvalue but it had a certain deviation from the desired valueand the deviation degree was less than 001 as shown inTable 3 In combination with the actual situation the valve
Science and Technology of Nuclear Installations 11
could not completely maintain the desired value because offactors such as its own structure and external interferenceduring the working process erefore this result suggestedthat after three types of control valves with flow charac-teristics of equal percentage quick-opening and linearattained equilibrium their outlet flow rate value with thedesired value had slight differences
On the other hand although the valve plug was balancedthe flow rate at the valve outlet still exhibited slight fluc-tuations near the desired value To compare the stability timeof different valve plugs we analyzed how fast the outlet flowrate stabilizes for each valve plug considering a deviation of01 (within the engineering allowable range) as the stabilitycriterion In other words when the outlet flow rate becameand remained in the range of 79920ndash80080 Lmin it wasconsidered to have attained stability Figure 19 and Table 3show that the outlet flow of the control valve with the flowcharacteristic of equal percentage was the first to attain therange of this zone and its stability time was the shortest Incontrast the control valve with the flow characteristic ofquick-opening lagged behind the other two valves
In summary when a certain pressure is given at the inletand outlet of the control valve (in this study the inlet andoutlet pressures were 10 and 8MPa respectively) the valveplug moves from a 10 opening to the balance position tocontrol the flow behind the valve e stability time of thecontrol valve with the flow characteristic of equal percentageis fast but this valve plug is subjected to sharply rapidlyoscillating fluid loads in the movement process the quick-opening valve plug takes a long time to attain stability andthe fluid load acting on the plug is large in the balanceposition e fluctuation amplitude of the fluid load appliedto the linear valve plug is relatively low and the damage tothis valve plug is small In practice the selection and design
t = 0001s
t = 0012s
t = 0066s
t = 0150s
t = 0007s
t = 0028s
t = 0090s
t = 0600s
8075706560555045403530252015105Velocity (ms)
Figure 16 Streamlines at different simulation times
times104
ndash5
0
5
10
15
20
25
30
Flui
d lo
ad (N
)
007 008003 006005004002001000Time (s)
times10ndash4
times106
ndash25ndash20ndash15ndash10
ndash505
2 864 100
LinearQuick-openingEqual percentage
Figure 17 Transient variation of fluid loads on different plugsurfaces
Table 2 Fluid load difference at the balance position for differentvalve plugs
e fluid loadon the plug Linear Quick-opening Equal percentage
At the balanceposition (N) 207867 223922 171488
12 Science and Technology of Nuclear Installations
requirements for the control valve plug are different owingto different working environments For example wheninvolving the high-security region on the warship thecontrol valve is required to respond rapidly in an emergencyto achieve rapid regulation erefore the valve plugrsquos
stability time is the focus and the valve plug with faststability time should be selected For control valves that workfrequently the valve plug is constantly in the process ofdynamic adjustment so we should choose the valve plugwith a smaller fluctuation amplitude of the fluid load
5 Conclusion
Based on the FSI a cosimulation for the mechanical-electric-fluid system of the control valve was performed using theFLUENT and AMESim platforms e interaction effectbetween the valve components and fluid flow was com-prehensively considered rough the coupling calculationand data exchange of the two software the opening curve ofthe control valve in the dynamic adjustment process wasobtained e UDF and dynamic mesh technology were alsoused to solve the problem of instantaneous changes in thecalculation region caused by the valve plug movement
Compared with the pure simulations this study per-formed a synchronous analysis of the unsteady flow fieldcharacteristics in the valve cavity and the dynamic responseof the actuator As the valve plug dynamically moved aplurality of low-pressure zones of different sizes appeared inthe valve chamber because of the FSI effect e jet flowformed by the asymmetric high-speed fluid near the valveseat area was accompanied by the vortex shedding phe-nomenon Moreover we observed that the valve plug surfacewas subjected to unstable and oscillating fluid loads whicheasily caused the valve plug to vibrate ese dynamicsimulation results can give theoretical guidance for accu-rately compensating the additional fluid load on the valveplug
e behavior of the control valve with different flowcharacteristics was compared by changing the valve plugshape For inlet and outlet pressures of the control valve of10 and 8MPa respectively the valve plug beginning to movefrom the 10 opening position the results indicated that thecontrol valve with the flow characteristic of equal percentagewas sensitive to the effect of the fluid flowe fluctuation inthe flow rate at this valve outlet and the oscillation of thefluid load acting on this valve plug were high for a smallopening exceeding those of the control valves with the flowcharacteristics of quick-opening and linear And more loadcompensation was required for the equal percentage plug Inaddition the control valve with the flow characteristic ofequal percentage was the first to attain equilibrium with thefastest stability time whereas the control valve with the flowcharacteristic of quick-opening was the slowest When thecontrol valve was stable the deviation between the outletflow rate value and the desired value for every type of controlvalve with three different flow characteristics was negligible
times104
0
1
2
3
4
5
6
7
8
9
10
Volu
me fl
ow ra
te (L
min
)
006 008002 004000Time (s)
times10ndash4
times104
150 105 2030354045505560
LinearQuick-openingEqual percentage
Figure 18 Outlet flow rate of the control valve corresponding todifferent plugs
times104
2
3
4
5
6
7
8
9
Volu
me fl
ow ra
te (L
min
)
01 04 0600 02 0503Time (s)
79920
80080
80000
80003
060504030201
LinearQuick-openingEqual percentage
Figure 19 Outlet flow rate of the control valve corresponding todifferent plugs in the balance position
Table 3 Flow rate difference in stable value and stable time fordifferent valve plugs
e flow rate atvalve outlet Linear Quick-opening Equal
percentageStable value (Lmin) 8000085 8000115 8000183Stability time (s) 0198 0245 0187
Science and Technology of Nuclear Installations 13
Owing to the various types of warship control valves theoperating characteristics of the valves should be completelymastered according to the actual working environmentswhen selecting them is study provides a new insightscheme on the dynamic analysis and performance evaluationin control valves e results are significant to reduce thefailure rate of the warship control valve improve the controlaccuracy and prolong the life of the valve
Data Availability
e data used to support the findings of this study are in-cluded within the article
Conflicts of Interest
e authors declare no conflicts of interest
Acknowledgments
is research was funded by the National Natural ScienceFoundation of China (Grant nos 51775310 and 51875316) theKey Research and Development Project of Shandong Province(Grant no 2019GHY112052) the Natural Science Foundationof Shandong Province (Grant no ZR2019MEE025) the Na-tional Key Research and Development Project of China (Grantno 2016YFD0701104) and the Project for Scientific ResearchInnovation Team of Young Scholar in Colleges and Univer-sities of Shandong Province (Grant no 2020KJB001)
References
[1] V Ahuja A Hosangadi P Cavallo and R Daines ldquoAnalysesof transient events in complex valve and feed systemsrdquo inProceedings Of the 41st AIAAASMESAEASEE Joint Pro-pulsion Conference And Exhibit pp 1ndash13 Tucson AZ USAJuly 2005
[2] P A Cavallo A Hosangadi and V Ahuja ldquoTransient sim-ulations of valve motion in cryogenic systemsrdquo in ProceedingsOf the 35th AIAA Fluid Dynamics Conference And Exhibitpp 1ndash11 Toronto Ontario Canada June 2005
[3] J Shipman A Hosangadi and V Ahuja ldquoUnsteady analysesof valve systems in rocket engine testing environmentsrdquo inProceedings Of the 40th AIAAASMESAEASEE Joint Pro-pulsion Conference And Exhibit pp 1ndash10 Fort LauderdaleFlorida USA July 2004
[4] B K Saha H Chattopadhyay P B Mandal andT Gangopadhyay ldquoDynamic simulation of a pressure regu-lating and shut-off valverdquo Computers amp Fluids vol 101pp 233ndash240 2014
[5] A Beune J G M Kuerten and M P C van Heumen ldquoCFDanalysis with fluid-structure interaction of opening high-pressure safety valvesrdquo Computers amp Fluids vol 64 no 3pp 108ndash116 2012
[6] R Morita F Inada M Mori K Tezuka and Y TsujimotoldquoCFD simulations and experiments of flow fluctuationsaround a steam control valverdquo Journal of Fluids Engineeringvol 129 no 1 pp 48ndash54 2007
[7] A Misra K Behdinan and W L Cleghorn ldquoSelf-excitedvibration of a control valve due to fluid-structure interactionrdquoJournal of Fluids and Structures vol 16 no 5 pp 649ndash6652002
[8] K Yonezawa R Ogawa K Ogi et al ldquoFlow-induced vibrationof a steam control valverdquo Journal of Fluids and Structuresvol 35 no 776 pp 76ndash88 2012
[9] C Bolin and A Engeda ldquoAnalysis of flow-induced instabilityin a redesigned steam control valverdquo Applied ermal En-gineering vol 83 pp 40ndash47 2015
[10] G Palau-Salvador P Gonzalez-Altozano and J Arviza-Valverde ldquoree-dimensional modeling and geometricalinfluence on the hydraulic performance of a control valverdquoJournal of Fluids Engineering vol 130 no 1 pp 151ndash1632008
[11] Y Xie Y Wang Y Liu F Cao and Y Pan ldquoUnsteadyanalyses of a control valve due to fluid-structure couplingrdquoMathematical Problems in Engineering vol 2013 Article ID174731 7 pages 2013
[12] J Tecza G Chochua and R Moll ldquoAnalysis of fluid-structureinteraction in a steam turbine throttle valverdquo in ProceedingsOf the ASME Turbo Expo Power for Land Sea and Airpp 2329ndash2338 Glasgow UK June 2010
[13] X Sun X Li Z Zheng and D Huang ldquoFluid-structure in-teraction analysis of a high-pressure regulating valve of a 600-MW ultra-supercritical steam turbinerdquo Proceedings of theInstitution of Mechanical Engineers Part A Journal of Powerand Energy vol 229 no 3 pp 270ndash279 2015
[14] H Wang M-j Peng Y-k Liu S-w Liu R-y Xu andH Saeed ldquoRemaining useful life prediction techniques ofelectric valves for nuclear power plants with convolutionkernel and LSTMrdquo Science and Technology of Nuclear In-stallations vol 2020 pp 1ndash13 2020
[15] R Fadaeinedjad M Moallem and G Moschopoulos ldquoSim-ulation of a wind turbine with doubly fed induction generatorby FAST and Simulinkrdquo IEEE Transactions on Energy Con-version vol 23 no 2 pp 690ndash700 2008
[16] R Zhang K P Lam S-c Yao and Y Zhang ldquoCoupledEnergyPlus and Computational Fluid Dynamics Simulationfor Natural Ventilationrdquo Building and Environment vol 68pp 100ndash113 2013
[17] T Kerh J J Lee and L C Wellford ldquoTransient fluid-structure interaction in a control valverdquo Journal of FluidsEngineering vol 119 no 2 pp 354ndash359 1997
[18] R Messahel C Regan M H Souli and C Ruiu ldquoNumericalinvestigation of homogeneous equilibrium model and fluid-structure interaction for multiphase water flows in pipesrdquoInternational Journal of Multiphase Flow vol 98 pp 56ndash662018
[19] LMS LMS ImagineLab AMESim Generic Co-simulation Rev13 Userrsquos Guide Roanne France 2013
[20] Emerson Electric Co Control Valve Handbook Lowa USA2005
[21] B Fitzgerald Control Valves for the Chemical Process In-dustries McGraw-Hill New York NY USA 1995
[22] V Yakhot and S A Orszag ldquoRenormalization group analysisof turbulence I Basic eoryrdquo Journal of Scientific Com-puting vol 1 no 1 pp 3ndash51 1986
[23] L Wang J Cui and K Yao ldquoNumerical simulation and analysisof gas flow field in serrated valve columnrdquo Chinese Journal ofChemical Engineering vol 16 no 4 pp 541ndash546 2008
[24] J-Y Qian Z-X Gao J-K Wang and Z-J Jin ldquoExperimentaland numerical analysis of spring stiffness on flow and valvecore movement in pilot control globe valverdquo InternationalJournal of Hydrogen Energy vol 42 no 27 pp 17192ndash172012017
14 Science and Technology of Nuclear Installations

operation according to the flowmeter measurement pro-vided by FLUENT to adjust the valve opening and closing tomaintain the actual flow rate close to the desired flow rateMeanwhile AMESim calculated the force balance on thevalve plug during the opening and closing of the controlvalve based on Equation (3) Subsequently the displacementof the valve plug resulting from the force balance calculationin AMESim was fed back to FLUENT to enable it to updatethe valve plug position and the dynamic mesh around thevalve
33 FLUENT Model for the Cosimulation
331 Parameter Settings of the Numerical Approach inFLUENT For the CFD simulation model of the controlvalve the profile curve of the valve plug was designedaccording to the formula of linear inherent flow charac-teristics [20 21] e front and rear pipelines of the valvewere lengthened twice and six times respectively compared
with the pipe diameter to ensure sufficient fluid flow egrid was generated using ANSYS ICEM An unstructuredgrid was used to mesh the entire flow field and the gridaround the valve seat and plug was refined Before selectingthe final cell number a grid independence study was per-formed with several types of computational cells Figure 6shows that the flow rate at the valve outlet varied withdifferent grid numbers When the grid number was 120000the flow rate did not change significantly To save compu-tation time we adopted this grid scheme Similarly the timestep was selected to be 10minus5s and the number of internalmaximum iterations for a single time step was 300 afterseveral levels of tests Here the dynamic parameters of thecontrol valve no longer produced a further change with thevariation in the time step Figure 7 shows the grid model ofthe control valve with a 10 opening e grid size wasapproximately 120000 cells
e simulation was carried out in software ANSYSFLUENT 170 the RNG turbulence k-ε model was adopted[22 23]e flowing fluid inside the valve was liquid water asthe same as AMESim All the walls were assumed to have noslip Pressure boundary conditions defined by the UDF wereapplied to the inlet and outlet of the control valve Duringtransient valve flow the valve plug and stem moved insidethe valve body e boundary surface of the valve plug andstem was defined as the dynamic mesh zones in the dynamicmesh setting e motion type of the dynamic zones wasrigid body motion which was an option available inFLUENT Mesh around the dynamic regions needs to bedefined to accommodate valve plug and stem motionSmoothing and remeshing were employed for this meshdefinitione displacement of the valve plug received fromAMESim was defined in the UDF And it can be read by themacro ldquoDEFINE_CG_MOTION()rdquo from FLUENT to re-generate the mesh A segregated solver was used and thePISO algorithm was applied to the coupling of pressure andvelocity And second-order upwind scheme was used for alldiscrete terms In the transmit simulation under relaxationfactors have an important influence on the convergence ofthe simulation Here the pressure the density the bodyforces k ε and the turbulent viscosity were set as 03 1 107 08 and 1 respectively When the residuals were less
Table 1 Nominal parameters of the AMESim model
Part Parameter Unit ValueControl valve Inlet pressure resource MPa 10Control valve Outlet pressure resource MPa 8Rack Pinion diameter mm 30Gear Large diameter mm 100Gear Small diameter mm 50PID controller Proportional gain mdash 80PID controller Integral gain mdash 1PID controller Derivative gain mdash 0Constant signal Desired flow rate Lmin 80000Mass Quality kg 10
Cosimulation = + +
AMESim-Fluent Cosimulation of a control valve
UserCosim block used to handle dataexchanges between softwares
Gear
ReducerTransmitter
Flowmeter used to monitorvalve outlet flow rate
Rack and pinion
Mass used to compute the forcebalance on the valve spool
ReceiverWater properties
Inlet pressure source Outlet pressure source
Electrical motor used to convert the outputsignal of the PID controller into a rotary signal
PID controler used to calculate the deviationsignal and transmit the results to the actuator
Constant signal used to seta target flow rate value
Comparison element used to completethe subtraction between the constant
signal and the feedback signal to obtainthe deviation signal
Fluid(flow field)
Mechanical(regulating mechanism and actuator)
Electric(control system)
Figure 4 Modified the AMESim model for cosimulation
Fluid load Inletoutletflow rate
Inletoutletpressure
Valve displacementand velocity
FLUENT AMESim
Figure 5 Exchanged variables between two solvers
Science and Technology of Nuclear Installations 5
than 10minus7 for continuity and 10minus6 for other parameters thesimulated flow field was considered to have attained theconvergence criterion
In the FLUENT to AMESim direction when the cosi-mulation was launched FLUENTcalculated the flow aroundthe valve plug based on Equations (1) and (2) and then thevalue of the fluid load on the valve plug due to this flow aswell as the value of the inlet and outlet flow rate was sent toAMESim e movement area of the valve plug was con-trolled using dynamic mesh technology Ultimately dataexchange and coupling occurred between the codes ofAMESim and FLUENT
332 FLUENT Validation In order to prove the reliabilityof the parameter settings and the solution scheme in theFLUENT simulation a comparison validation was per-formed with the results of Qian et al[24] e model wasbased on a pilot-control globe valve and simulated in ANSYSFLUENT 170 maintaining all the parameter settings thesame as those of Qian et al [24] Figure 8 shows the steadyvalve plug displacement for our computational results andexperimental results of Qian et al[24] e trends of thesimulation results and experimental results were within anacceptable range is demonstrated the feasibility of thepure FLUENT simulation and validated the numerical set-tings used for the simulation of the valve in this study
34 Verification for the Coupled Scheme Due to the limi-tation of the experimental conditions we conducted theverification of the coupled scheme by comparing the resultsbetween the pure FLUENT simulation and the FLUENT
Pres
sure
inle
t
Pres
sure
out
let
200mm 200mm
Figure 7 Modified FLUENT grid model of fluid zones of the control valve
6 16 1810 122 84 14Cell number (104)
25200
25300
25400
25500
25600
25700
25800
25900
Out
let fl
ow ra
te (L
min
)
Figure 6 Flow rate under different computational cells
02468
101214161820222426
Stea
dy v
alve
plu
g di
spla
cem
ent (
mm
)
00 01 05 06 080702 0403Inlet pressure (MPa)
Quian et al (k = 5100Nm)Current study (k = 5100Nm)
Qian et al (k = 7700Nm)Current study (k = 7700Nm)
Figure 8 Comparison of the results of the current study and thoseof Qian et al[24]
6 Science and Technology of Nuclear Installations
AMESim cosimulation with the same parametersemodelwas based on a simplified spring-loaded check valve egoverning equation for this motion of the valve is expressedas follows
Fprime(t) kX(t) + Ffprime + mprime euroX (t) Ff
prime c _X(t)1113966 (4)
where Fprime(t) is the fluid load on the valve plug X(t) _X(t)and euroX(t) are the displacement velocity and acceleration ofthe valve plug respectively k is the stiffness of the spring mprimeis the mass of the valve plug c is the equivalent viscousdamping coefficient and the friction force of the valve plugFfprime is also equivalent to a viscous damping force which is
proportional to the speed of the valve plugIn the pure FLUENT simulation the valve plug motion
was solved using an iterative scheme based on the classicalRunge-Kutta method When the number of iteration timesteps was zero the valve was in a static statee accelerationof the valve plug euroX
n(t) at n time steps was calculated by
using the following equation
euroXn
(t) Fprimen(t) minus kX
n(t) minus c _X
n(t)
mprime (5)
where Fprimen(t) is the fluid load on the valve plug Xn(t) is thedisplacement of the valve plug and _X
n(t) is the velocity of
the valve plug at n number of time stepsen the displacement Xn+1(t) and velocity _X
n+1(t) of
the valve plug motion at the next number of time steps n + 1become
Xn+1
(t) Xn(t) + _X
n(t)Δt +
12
euroXn(t)Δt2
_Xn+1
(t) _Xn(t) + euroX
n(t)Δt
(6)
where Δt is the time stepe UDF was compiled to achieve the iteration scheme
and it was loaded into the FLUENT solver to control themovement of the valve plug More detailed settings andinformation related to the grid independence study and theselection of the time step for FLUENT calculations arediscussed in Section 33 e final grid model of the checkvalve is shown in Figure 9
In the FLUENTAMESim cosimulation a cosimulationmodel for the data exchange module and the spring systemwas established in the AMESim solver as shown in Fig-ure 10 e valve plug was represented by a mass For theexchanged variables between the two solvers FLUENTcalculated the fluid load on the valve plug based on Equa-tions (1) and (2) is fluid load was input to AMESim tosimulate the spring system based on Equation (4) efeedback on the velocity of the valve plug from AMESimwas in turn delivered to FLUENT to update the valve plugposition for the next iteration
Figure 11 shows a comparison of the results of thedisplacement response and fluid load on the valve plugbetween the pure FLUENT simulation and FLUENTAMESim cosimulation with the same parameters A goodagreement was observed which demonstrated the feasibilityof the coupled scheme
4 Results
41 Dynamic Studies Related to Valve Timing In the initialsimulation status the inlet and outlet pressures of thecontrol valve were 10 and 8MPa respectively Meanwhilethe valve opening was maintained at 10 First a steadysimulation using FLUENT was conducted to obtain a stableflow field and the flow rate at the valve outlet was 25820 Lmin en the cosimulation was performed for transientcalculation under the condition of setting the same time step(in AMESim and FLUENT solvers) residual accuracy (inFLUENT solver) and calculation tolerance (in AMESimsolver) Additionally the number of internal maximum it-erations for a single time step was set in the FLUENT solverso that the dynamic simulation can converge at each timestep e outlet flow rate set by the PID controller was80000 Lmin To attain the desired value of the outlet flowrate the actuator of the control valve adjusted the openingand closing of the valve plug according to the output signalof the controller When the flow rate at the valve outletattained the target value the valve opening no longerchanged at a balanced position and the cosimulationachieved convergence
Figure 12 shows the dynamic curves of the valve plugdisplacement flow rate at the valve outlet fluid load anddriving force of the actuator acting on the valve plug andvalve stem during the dynamic change of the valve openingIn the first 7ms the fluid load acting on the valve plugexhibited an oscillating and unstable form whereas thedriving force of the actuator originally increased and thendecreased And the direction of these two forces changedduring this period of time When the valve plug displace-ment increased to the first peak value of 40mm the valveopening was approximately 36 In this process the flowrate at the valve outlet transformed from a sharp accelerationwith a large curve slope to a linear acceleration which wasrelated to the increase and decrease in the valve plug speedSubsequently the valve plug moved toward the closingdirection and the flow rate variation at the valve outletslowed down After exceeding 4 of the desired flow valuethe outlet flow rate gradually decreased Since the signaldifference received by the PID controller was not zero thevalve plug continued to adjust continuously and its dis-placement again exhibited several decaying fluctuationsEventually at time t 035 s the flow rate at the valve outletwas approximately 80000 Lmin e valve plug remained ata final opening of 30 with a very small fluctuation Si-multaneously the resultant force of the valve plug wasapproximately zero which indicated that the fluid load anddriving force of the actuator acting on the plug tended to bestable but there was a slight fluctuation
A warship environment is complex and changeableWith the leaping change in the shiprsquos working conditionswhen a warship implements many complicated actions oftactics and techniques the valve plug is subjected to randomand oscillating fluid loads in the process of dynamic ad-justment especially from t 0001 s to t 0005 s andt 0012 s to t 0016 s (see Figure 13) e resultant force ofthis fluid load and driving force of the actuator may be
Science and Technology of Nuclear Installations 7
greater or less than the actual adjustment force required bythe valve plug reducing the control precision of the controlvalve Furthermore oscillating fluid loads can cause vibra-tion noise and other hazards on the valve plug ereforethe oscillating fluid loads need to be compensated on de-mand to reduce the valve plug oscillation and improve thestability of the control valve
Figures 14 and 15 depict the pressure field and velocitydistributions in the valve chamber during the valve plugmovement For the period of the simulation the mostrepresentative time points were selected e pressure dis-tributions in Figure 14 show that the pressure of the flowchannel showed a decreasing trend from the pipeline inlet tothe pipeline outlet from t 0001 s to t 06 s In the orifice
region between the valve plug and valve seat the flow areawas limited and the pressure drop was large the pressuredrop primarily overcame the resistance of the flow channelin the control valve As the valve plug moved from the firstmaximum displacement (at time t 0007 s) to the closingdirection a low-pressure region was generated on the side ofthe valve plug and seat Along with the dynamic adjustmentof the valve opening this low-pressure region was contin-uously enlarged and moved away from the valve seat to thevalversquos downstream chamber for 0012 slt tlt 0090 s A partof the low-pressure region also appeared at the top of thevalve housing At t 06 s the valve plug has attainedequilibrium and the low-pressure region was gradually notapparent Moreover we observed that the upper end of the
Pres
sure
inle
t
Pres
sure
out
let
50mm20mm Valve plug
Figure 9 Grid model for verification
Water properties
UserCosim block used to handle dataexchanges between soware types
Mass used to compute the forcebalance on the valve spool
Spring
Spool_VelocityUserCosim
InterfaceAMESimFLUENT
Fluid_Force
Figure 10 AMESim model for validation
1290
1300
1310
1320
1330
1340
1350
Plug
disp
lace
men
t (m
m)
2010 150500Time (s)
FLUENT simulationCosimulation
(a)
ndash7
ndash5
ndash3
ndash1
1
3
5
7
Flui
d lo
ad (N
)
20151000 05Time (s)
FLUENT simulationCosimulation
(b)
Figure 11 Comparison of the results of the pure FLUENT simulation and FLUENTAMESim cosimulation (a) Displacement response(b) Fluid load acting on valve plug
8 Science and Technology of Nuclear Installations
times104
times104
times104
10
13
16
19
22
25
Flui
d lo
ad (N
)
120
125
130
135
140
145
0001 0002 0003 0004 0005
001000 003 004002 005Time (s)
00130012 00150014 0016200
205
210
215
220
Figure 13 Transient variation of fluid loads on plug surfaces
0010
0015
0020
0025
0030
0035
0040
0045
Plug
disp
lace
men
t (m
)
0502 0600 0401 03Time (s)
(a)
20000
30000
40000
50000
60000
70000
80000
90000
Volu
me fl
ow ra
te (L
min
)
0502 0600 0401 03Time (s)
(b)
ndash150000
ndash100000
ndash50000
0
50000
100000
150000
200000
250000
300000
Flui
d lo
ad (N
)
0502 0600 0401 03Time (s)
(c)
ndash150000
ndash50000
50000
150000
250000
350000
450000
Driv
ing
forc
e (N
)
0502 04 0600 01 03Time (s)
(d)
Figure 12 Cosimulation results for the valversquos dynamic variation versus time (a) Valve plug displacement (b) Volume flow rate at the valveoutlet (c) Fluid load on the valve plug (d) Driving force of the actuator
Science and Technology of Nuclear Installations 9
t = 0001s t = 0007s t = 0012s
t = 0028s t = 0046s t = 0066s
t = 0090s t = 0150s t = 0600s
Pressure (Pa) 70E + 06 74E + 06 78E + 06 82E + 06 86E + 06 90E + 06 94E + 06 98E + 06
Figure 14 Pressure field distributions at different times
t = 0001s t = 0007s t = 0012s
t = 0028s t = 0046s t = 0066s
t = 0090s t = 0150s t = 0600s
8075706560555045403530252015105Velocity (ms)
Figure 15 Velocity magnitude distributions at different times
10 Science and Technology of Nuclear Installations
valve plug was attached to a low-pressure region which wasprone to cavitation resulting in potential damage to thevalve plug
For the pressure field of t 0007 s the fluid pressure inthe valve cavity decreased from the bottom face to the upperface of the valve plug and the maximum pressure in thevicinity of the bottom of the valve plug was approximately98MPa In the subsequent 5ms the area occupied by thehigh-pressure region on the lower half surface of the valveplug gradually expanded at t 0012 s in particular thepressure in the partial region was approximately 10MPaReferring to the fluid load curve obtained by AMESimshown in Figure 13 the fluid load acting on the valve plugcontinuously increased within this period (from t 0007 s tot 0012 s) e main reason was that as the valve plugmoved toward the closing direction during this period theflow area of the orifice region became smaller and thepressure fluctuation in the valve cavity increased which leadto a larger area of the high-pressure region on the lowersurface of the plug On the other hand the fluid load on thevalve plug was obtained by integrating the surface area of thevalve plug with the pressure distribution on the upper andlower surfaces of the valve plug us the increase of thepressure difference between the lower and upper surfaces ofthe valve plug made the fluid load increase A similarphenomenon occurred in the period from t 0090 to0150 s erefore the calculation results of AMESim wereobserved to correspond with those of FLUENT
Figure 15 shows the sequence of the velocity magnitudecontours In the initial opening process of the valve plug fortlt 0005 s the flow area at the orifice was small e flowchannels were in a strong throttling state which caused thefluid pressure to decrease and the velocity to increase in theorifice region As the fluid accelerated through the narrowgap of the orifice the valve seat functioned as a throatresulting in a jet at t 0007 s that hit the valve plug at highvelocities After t 0012 s the valve plug moved toward theclosing direction and an asymmetric jet occurred at bothsides of the valve seat e asymmetric accelerating fluidcaused the hydraulic inductance owing to inertia It acted onthe surface of the valve plug and coupled with the movingvalve plug as well as the uneven pressure gradient in thisregion which were the main reasons for variable and os-cillating fluid loads on the valve plug (see Figure 13)
From Figure 16 the velocity of the jet region was higherthan that of the nearby fluid region when the fluid flowedthrough the orifice In the first 10ms the high-speed andlow-speed streams were mixed in the nearby regionresulting in a strong shear effect which caused the formationof vortices in the low-speed region Owing to the structuralobstruction vortices appeared on the left side and top wall ofthe valve body where the fluid stagnated and its velocitydecreased At t 0012 s vortex production at the lip of thevalve seat resulted in unsteady shedding and a large amountof energy was removed the phenomenon of vortex sheddingchanged the pressure distribution around the valve seat (seeFigure 14) which caused a sudden change in the fluid loadon the valve plug Furthermore the jet spread out further tothe valversquos downstream chamber which cannot avoid the
flow pathrsquos bend resulting in the formation of a recirculationregion as shown at t 0028 s is recirculation regionexpanded to the bottom of the downstream pipeline andoccupied the flow channel space Consequently the main-stream fluid was squeezed and its flow direction wasdisturbed
42 Dynamic Studies Related to Different Valve Plugs Tofurther explore the dynamic performance of the controlvalve plug we changed the shape of the valve plug eprofile curves of two other valve plugs with the flow char-acteristics of quick-opening and equal percentage weredesigned according to the calculation formula of the in-herent flow characteristic [20 21] and the cosimulations forthese two valves were conducted During the simulationprocess the initial opening percentage of the valve plugdesired flow rate at valve outlet boundary conditions andsolution parameters were unchanged e simulation resultswere as follows
Figure 17 shows the variation in fluid loads on the valveplug under different plug shapes By comparison we ob-served that in the first 1ms the fluid load acting on the equalpercentage plug exhibited high-frequency oscillations alongthe horizontal axis which was far greater than that of thefluid load acting on the other two types of valve plugserefore more load compensation was needed for the equalpercentage plug in this time period e oscillation trend ofthe unstable fluid loads acting on the quick-opening plugwas similar to that of the linear plug which was charac-terized by irregular and pulse-like fluctuations and itsfluctuation amplitude was larger than that of the linear plugAs the valve opening increased the amplitude attenuation ofthe fluid load acting on the linear plug was the fastest eoscillating fluid loads experienced by three different types ofvalve plugs gradually decreased and then fluctuated within asmall range When the valve plug attained equilibrium thefluid load acting on the quick-opening plug was the largestwhereas the equal percentage plug was the smallest whichdiffers by approximately 13 times as shown in Table 2
Figure 18 shows the dynamic change in the flow rate atthe valve outlet As the initial displacement of the valve plugincreased the outlet flow rate for the control valve with theflow characteristic of equal percentage fluctuated signifi-cantly within 1mse flow behavior was consistent with thehigh-frequency oscillating fluid loads (Figure 17) the largerthe flow fluctuation the greater the oscillating amplitude ofthe fluid load on the valve plug is process produced animpulsive force on the valve plug which would causestructural failure When the outlet flow rate for the threecontrol valves with different flow characteristics tended tothe desired value all the valve plugs were balanced to achievethe goal of controlling the flow rate behind the valve
Figure 19 shows the flow curves when three controlvalves were in a stable state We observed that the outlet flowrate for every control valve was approximate to the targetvalue but it had a certain deviation from the desired valueand the deviation degree was less than 001 as shown inTable 3 In combination with the actual situation the valve
Science and Technology of Nuclear Installations 11
could not completely maintain the desired value because offactors such as its own structure and external interferenceduring the working process erefore this result suggestedthat after three types of control valves with flow charac-teristics of equal percentage quick-opening and linearattained equilibrium their outlet flow rate value with thedesired value had slight differences
On the other hand although the valve plug was balancedthe flow rate at the valve outlet still exhibited slight fluc-tuations near the desired value To compare the stability timeof different valve plugs we analyzed how fast the outlet flowrate stabilizes for each valve plug considering a deviation of01 (within the engineering allowable range) as the stabilitycriterion In other words when the outlet flow rate becameand remained in the range of 79920ndash80080 Lmin it wasconsidered to have attained stability Figure 19 and Table 3show that the outlet flow of the control valve with the flowcharacteristic of equal percentage was the first to attain therange of this zone and its stability time was the shortest Incontrast the control valve with the flow characteristic ofquick-opening lagged behind the other two valves
In summary when a certain pressure is given at the inletand outlet of the control valve (in this study the inlet andoutlet pressures were 10 and 8MPa respectively) the valveplug moves from a 10 opening to the balance position tocontrol the flow behind the valve e stability time of thecontrol valve with the flow characteristic of equal percentageis fast but this valve plug is subjected to sharply rapidlyoscillating fluid loads in the movement process the quick-opening valve plug takes a long time to attain stability andthe fluid load acting on the plug is large in the balanceposition e fluctuation amplitude of the fluid load appliedto the linear valve plug is relatively low and the damage tothis valve plug is small In practice the selection and design
t = 0001s
t = 0012s
t = 0066s
t = 0150s
t = 0007s
t = 0028s
t = 0090s
t = 0600s
8075706560555045403530252015105Velocity (ms)
Figure 16 Streamlines at different simulation times
times104
ndash5
0
5
10
15
20
25
30
Flui
d lo
ad (N
)
007 008003 006005004002001000Time (s)
times10ndash4
times106
ndash25ndash20ndash15ndash10
ndash505
2 864 100
LinearQuick-openingEqual percentage
Figure 17 Transient variation of fluid loads on different plugsurfaces
Table 2 Fluid load difference at the balance position for differentvalve plugs
e fluid loadon the plug Linear Quick-opening Equal percentage
At the balanceposition (N) 207867 223922 171488
12 Science and Technology of Nuclear Installations
requirements for the control valve plug are different owingto different working environments For example wheninvolving the high-security region on the warship thecontrol valve is required to respond rapidly in an emergencyto achieve rapid regulation erefore the valve plugrsquos
stability time is the focus and the valve plug with faststability time should be selected For control valves that workfrequently the valve plug is constantly in the process ofdynamic adjustment so we should choose the valve plugwith a smaller fluctuation amplitude of the fluid load
5 Conclusion
Based on the FSI a cosimulation for the mechanical-electric-fluid system of the control valve was performed using theFLUENT and AMESim platforms e interaction effectbetween the valve components and fluid flow was com-prehensively considered rough the coupling calculationand data exchange of the two software the opening curve ofthe control valve in the dynamic adjustment process wasobtained e UDF and dynamic mesh technology were alsoused to solve the problem of instantaneous changes in thecalculation region caused by the valve plug movement
Compared with the pure simulations this study per-formed a synchronous analysis of the unsteady flow fieldcharacteristics in the valve cavity and the dynamic responseof the actuator As the valve plug dynamically moved aplurality of low-pressure zones of different sizes appeared inthe valve chamber because of the FSI effect e jet flowformed by the asymmetric high-speed fluid near the valveseat area was accompanied by the vortex shedding phe-nomenon Moreover we observed that the valve plug surfacewas subjected to unstable and oscillating fluid loads whicheasily caused the valve plug to vibrate ese dynamicsimulation results can give theoretical guidance for accu-rately compensating the additional fluid load on the valveplug
e behavior of the control valve with different flowcharacteristics was compared by changing the valve plugshape For inlet and outlet pressures of the control valve of10 and 8MPa respectively the valve plug beginning to movefrom the 10 opening position the results indicated that thecontrol valve with the flow characteristic of equal percentagewas sensitive to the effect of the fluid flowe fluctuation inthe flow rate at this valve outlet and the oscillation of thefluid load acting on this valve plug were high for a smallopening exceeding those of the control valves with the flowcharacteristics of quick-opening and linear And more loadcompensation was required for the equal percentage plug Inaddition the control valve with the flow characteristic ofequal percentage was the first to attain equilibrium with thefastest stability time whereas the control valve with the flowcharacteristic of quick-opening was the slowest When thecontrol valve was stable the deviation between the outletflow rate value and the desired value for every type of controlvalve with three different flow characteristics was negligible
times104
0
1
2
3
4
5
6
7
8
9
10
Volu
me fl
ow ra
te (L
min
)
006 008002 004000Time (s)
times10ndash4
times104
150 105 2030354045505560
LinearQuick-openingEqual percentage
Figure 18 Outlet flow rate of the control valve corresponding todifferent plugs
times104
2
3
4
5
6
7
8
9
Volu
me fl
ow ra
te (L
min
)
01 04 0600 02 0503Time (s)
79920
80080
80000
80003
060504030201
LinearQuick-openingEqual percentage
Figure 19 Outlet flow rate of the control valve corresponding todifferent plugs in the balance position
Table 3 Flow rate difference in stable value and stable time fordifferent valve plugs
e flow rate atvalve outlet Linear Quick-opening Equal
percentageStable value (Lmin) 8000085 8000115 8000183Stability time (s) 0198 0245 0187
Science and Technology of Nuclear Installations 13
Owing to the various types of warship control valves theoperating characteristics of the valves should be completelymastered according to the actual working environmentswhen selecting them is study provides a new insightscheme on the dynamic analysis and performance evaluationin control valves e results are significant to reduce thefailure rate of the warship control valve improve the controlaccuracy and prolong the life of the valve
Data Availability
e data used to support the findings of this study are in-cluded within the article
Conflicts of Interest
e authors declare no conflicts of interest
Acknowledgments
is research was funded by the National Natural ScienceFoundation of China (Grant nos 51775310 and 51875316) theKey Research and Development Project of Shandong Province(Grant no 2019GHY112052) the Natural Science Foundationof Shandong Province (Grant no ZR2019MEE025) the Na-tional Key Research and Development Project of China (Grantno 2016YFD0701104) and the Project for Scientific ResearchInnovation Team of Young Scholar in Colleges and Univer-sities of Shandong Province (Grant no 2020KJB001)
References
[1] V Ahuja A Hosangadi P Cavallo and R Daines ldquoAnalysesof transient events in complex valve and feed systemsrdquo inProceedings Of the 41st AIAAASMESAEASEE Joint Pro-pulsion Conference And Exhibit pp 1ndash13 Tucson AZ USAJuly 2005
[2] P A Cavallo A Hosangadi and V Ahuja ldquoTransient sim-ulations of valve motion in cryogenic systemsrdquo in ProceedingsOf the 35th AIAA Fluid Dynamics Conference And Exhibitpp 1ndash11 Toronto Ontario Canada June 2005
[3] J Shipman A Hosangadi and V Ahuja ldquoUnsteady analysesof valve systems in rocket engine testing environmentsrdquo inProceedings Of the 40th AIAAASMESAEASEE Joint Pro-pulsion Conference And Exhibit pp 1ndash10 Fort LauderdaleFlorida USA July 2004
[4] B K Saha H Chattopadhyay P B Mandal andT Gangopadhyay ldquoDynamic simulation of a pressure regu-lating and shut-off valverdquo Computers amp Fluids vol 101pp 233ndash240 2014
[5] A Beune J G M Kuerten and M P C van Heumen ldquoCFDanalysis with fluid-structure interaction of opening high-pressure safety valvesrdquo Computers amp Fluids vol 64 no 3pp 108ndash116 2012
[6] R Morita F Inada M Mori K Tezuka and Y TsujimotoldquoCFD simulations and experiments of flow fluctuationsaround a steam control valverdquo Journal of Fluids Engineeringvol 129 no 1 pp 48ndash54 2007
[7] A Misra K Behdinan and W L Cleghorn ldquoSelf-excitedvibration of a control valve due to fluid-structure interactionrdquoJournal of Fluids and Structures vol 16 no 5 pp 649ndash6652002
[8] K Yonezawa R Ogawa K Ogi et al ldquoFlow-induced vibrationof a steam control valverdquo Journal of Fluids and Structuresvol 35 no 776 pp 76ndash88 2012
[9] C Bolin and A Engeda ldquoAnalysis of flow-induced instabilityin a redesigned steam control valverdquo Applied ermal En-gineering vol 83 pp 40ndash47 2015
[10] G Palau-Salvador P Gonzalez-Altozano and J Arviza-Valverde ldquoree-dimensional modeling and geometricalinfluence on the hydraulic performance of a control valverdquoJournal of Fluids Engineering vol 130 no 1 pp 151ndash1632008
[11] Y Xie Y Wang Y Liu F Cao and Y Pan ldquoUnsteadyanalyses of a control valve due to fluid-structure couplingrdquoMathematical Problems in Engineering vol 2013 Article ID174731 7 pages 2013
[12] J Tecza G Chochua and R Moll ldquoAnalysis of fluid-structureinteraction in a steam turbine throttle valverdquo in ProceedingsOf the ASME Turbo Expo Power for Land Sea and Airpp 2329ndash2338 Glasgow UK June 2010
[13] X Sun X Li Z Zheng and D Huang ldquoFluid-structure in-teraction analysis of a high-pressure regulating valve of a 600-MW ultra-supercritical steam turbinerdquo Proceedings of theInstitution of Mechanical Engineers Part A Journal of Powerand Energy vol 229 no 3 pp 270ndash279 2015
[14] H Wang M-j Peng Y-k Liu S-w Liu R-y Xu andH Saeed ldquoRemaining useful life prediction techniques ofelectric valves for nuclear power plants with convolutionkernel and LSTMrdquo Science and Technology of Nuclear In-stallations vol 2020 pp 1ndash13 2020
[15] R Fadaeinedjad M Moallem and G Moschopoulos ldquoSim-ulation of a wind turbine with doubly fed induction generatorby FAST and Simulinkrdquo IEEE Transactions on Energy Con-version vol 23 no 2 pp 690ndash700 2008
[16] R Zhang K P Lam S-c Yao and Y Zhang ldquoCoupledEnergyPlus and Computational Fluid Dynamics Simulationfor Natural Ventilationrdquo Building and Environment vol 68pp 100ndash113 2013
[17] T Kerh J J Lee and L C Wellford ldquoTransient fluid-structure interaction in a control valverdquo Journal of FluidsEngineering vol 119 no 2 pp 354ndash359 1997
[18] R Messahel C Regan M H Souli and C Ruiu ldquoNumericalinvestigation of homogeneous equilibrium model and fluid-structure interaction for multiphase water flows in pipesrdquoInternational Journal of Multiphase Flow vol 98 pp 56ndash662018
[19] LMS LMS ImagineLab AMESim Generic Co-simulation Rev13 Userrsquos Guide Roanne France 2013
[20] Emerson Electric Co Control Valve Handbook Lowa USA2005
[21] B Fitzgerald Control Valves for the Chemical Process In-dustries McGraw-Hill New York NY USA 1995
[22] V Yakhot and S A Orszag ldquoRenormalization group analysisof turbulence I Basic eoryrdquo Journal of Scientific Com-puting vol 1 no 1 pp 3ndash51 1986
[23] L Wang J Cui and K Yao ldquoNumerical simulation and analysisof gas flow field in serrated valve columnrdquo Chinese Journal ofChemical Engineering vol 16 no 4 pp 541ndash546 2008
[24] J-Y Qian Z-X Gao J-K Wang and Z-J Jin ldquoExperimentaland numerical analysis of spring stiffness on flow and valvecore movement in pilot control globe valverdquo InternationalJournal of Hydrogen Energy vol 42 no 27 pp 17192ndash172012017
14 Science and Technology of Nuclear Installations

than 10minus7 for continuity and 10minus6 for other parameters thesimulated flow field was considered to have attained theconvergence criterion
In the FLUENT to AMESim direction when the cosi-mulation was launched FLUENTcalculated the flow aroundthe valve plug based on Equations (1) and (2) and then thevalue of the fluid load on the valve plug due to this flow aswell as the value of the inlet and outlet flow rate was sent toAMESim e movement area of the valve plug was con-trolled using dynamic mesh technology Ultimately dataexchange and coupling occurred between the codes ofAMESim and FLUENT
332 FLUENT Validation In order to prove the reliabilityof the parameter settings and the solution scheme in theFLUENT simulation a comparison validation was per-formed with the results of Qian et al[24] e model wasbased on a pilot-control globe valve and simulated in ANSYSFLUENT 170 maintaining all the parameter settings thesame as those of Qian et al [24] Figure 8 shows the steadyvalve plug displacement for our computational results andexperimental results of Qian et al[24] e trends of thesimulation results and experimental results were within anacceptable range is demonstrated the feasibility of thepure FLUENT simulation and validated the numerical set-tings used for the simulation of the valve in this study
34 Verification for the Coupled Scheme Due to the limi-tation of the experimental conditions we conducted theverification of the coupled scheme by comparing the resultsbetween the pure FLUENT simulation and the FLUENT
Pres
sure
inle
t
Pres
sure
out
let
200mm 200mm
Figure 7 Modified FLUENT grid model of fluid zones of the control valve
6 16 1810 122 84 14Cell number (104)
25200
25300
25400
25500
25600
25700
25800
25900
Out
let fl
ow ra
te (L
min
)
Figure 6 Flow rate under different computational cells
02468
101214161820222426
Stea
dy v
alve
plu
g di
spla
cem
ent (
mm
)
00 01 05 06 080702 0403Inlet pressure (MPa)
Quian et al (k = 5100Nm)Current study (k = 5100Nm)
Qian et al (k = 7700Nm)Current study (k = 7700Nm)
Figure 8 Comparison of the results of the current study and thoseof Qian et al[24]
6 Science and Technology of Nuclear Installations
AMESim cosimulation with the same parametersemodelwas based on a simplified spring-loaded check valve egoverning equation for this motion of the valve is expressedas follows
Fprime(t) kX(t) + Ffprime + mprime euroX (t) Ff
prime c _X(t)1113966 (4)
where Fprime(t) is the fluid load on the valve plug X(t) _X(t)and euroX(t) are the displacement velocity and acceleration ofthe valve plug respectively k is the stiffness of the spring mprimeis the mass of the valve plug c is the equivalent viscousdamping coefficient and the friction force of the valve plugFfprime is also equivalent to a viscous damping force which is
proportional to the speed of the valve plugIn the pure FLUENT simulation the valve plug motion
was solved using an iterative scheme based on the classicalRunge-Kutta method When the number of iteration timesteps was zero the valve was in a static statee accelerationof the valve plug euroX
n(t) at n time steps was calculated by
using the following equation
euroXn
(t) Fprimen(t) minus kX
n(t) minus c _X
n(t)
mprime (5)
where Fprimen(t) is the fluid load on the valve plug Xn(t) is thedisplacement of the valve plug and _X
n(t) is the velocity of
the valve plug at n number of time stepsen the displacement Xn+1(t) and velocity _X
n+1(t) of
the valve plug motion at the next number of time steps n + 1become
Xn+1
(t) Xn(t) + _X
n(t)Δt +
12
euroXn(t)Δt2
_Xn+1
(t) _Xn(t) + euroX
n(t)Δt
(6)
where Δt is the time stepe UDF was compiled to achieve the iteration scheme
and it was loaded into the FLUENT solver to control themovement of the valve plug More detailed settings andinformation related to the grid independence study and theselection of the time step for FLUENT calculations arediscussed in Section 33 e final grid model of the checkvalve is shown in Figure 9
In the FLUENTAMESim cosimulation a cosimulationmodel for the data exchange module and the spring systemwas established in the AMESim solver as shown in Fig-ure 10 e valve plug was represented by a mass For theexchanged variables between the two solvers FLUENTcalculated the fluid load on the valve plug based on Equa-tions (1) and (2) is fluid load was input to AMESim tosimulate the spring system based on Equation (4) efeedback on the velocity of the valve plug from AMESimwas in turn delivered to FLUENT to update the valve plugposition for the next iteration
Figure 11 shows a comparison of the results of thedisplacement response and fluid load on the valve plugbetween the pure FLUENT simulation and FLUENTAMESim cosimulation with the same parameters A goodagreement was observed which demonstrated the feasibilityof the coupled scheme
4 Results
41 Dynamic Studies Related to Valve Timing In the initialsimulation status the inlet and outlet pressures of thecontrol valve were 10 and 8MPa respectively Meanwhilethe valve opening was maintained at 10 First a steadysimulation using FLUENT was conducted to obtain a stableflow field and the flow rate at the valve outlet was 25820 Lmin en the cosimulation was performed for transientcalculation under the condition of setting the same time step(in AMESim and FLUENT solvers) residual accuracy (inFLUENT solver) and calculation tolerance (in AMESimsolver) Additionally the number of internal maximum it-erations for a single time step was set in the FLUENT solverso that the dynamic simulation can converge at each timestep e outlet flow rate set by the PID controller was80000 Lmin To attain the desired value of the outlet flowrate the actuator of the control valve adjusted the openingand closing of the valve plug according to the output signalof the controller When the flow rate at the valve outletattained the target value the valve opening no longerchanged at a balanced position and the cosimulationachieved convergence
Figure 12 shows the dynamic curves of the valve plugdisplacement flow rate at the valve outlet fluid load anddriving force of the actuator acting on the valve plug andvalve stem during the dynamic change of the valve openingIn the first 7ms the fluid load acting on the valve plugexhibited an oscillating and unstable form whereas thedriving force of the actuator originally increased and thendecreased And the direction of these two forces changedduring this period of time When the valve plug displace-ment increased to the first peak value of 40mm the valveopening was approximately 36 In this process the flowrate at the valve outlet transformed from a sharp accelerationwith a large curve slope to a linear acceleration which wasrelated to the increase and decrease in the valve plug speedSubsequently the valve plug moved toward the closingdirection and the flow rate variation at the valve outletslowed down After exceeding 4 of the desired flow valuethe outlet flow rate gradually decreased Since the signaldifference received by the PID controller was not zero thevalve plug continued to adjust continuously and its dis-placement again exhibited several decaying fluctuationsEventually at time t 035 s the flow rate at the valve outletwas approximately 80000 Lmin e valve plug remained ata final opening of 30 with a very small fluctuation Si-multaneously the resultant force of the valve plug wasapproximately zero which indicated that the fluid load anddriving force of the actuator acting on the plug tended to bestable but there was a slight fluctuation
A warship environment is complex and changeableWith the leaping change in the shiprsquos working conditionswhen a warship implements many complicated actions oftactics and techniques the valve plug is subjected to randomand oscillating fluid loads in the process of dynamic ad-justment especially from t 0001 s to t 0005 s andt 0012 s to t 0016 s (see Figure 13) e resultant force ofthis fluid load and driving force of the actuator may be
Science and Technology of Nuclear Installations 7
greater or less than the actual adjustment force required bythe valve plug reducing the control precision of the controlvalve Furthermore oscillating fluid loads can cause vibra-tion noise and other hazards on the valve plug ereforethe oscillating fluid loads need to be compensated on de-mand to reduce the valve plug oscillation and improve thestability of the control valve
Figures 14 and 15 depict the pressure field and velocitydistributions in the valve chamber during the valve plugmovement For the period of the simulation the mostrepresentative time points were selected e pressure dis-tributions in Figure 14 show that the pressure of the flowchannel showed a decreasing trend from the pipeline inlet tothe pipeline outlet from t 0001 s to t 06 s In the orifice
region between the valve plug and valve seat the flow areawas limited and the pressure drop was large the pressuredrop primarily overcame the resistance of the flow channelin the control valve As the valve plug moved from the firstmaximum displacement (at time t 0007 s) to the closingdirection a low-pressure region was generated on the side ofthe valve plug and seat Along with the dynamic adjustmentof the valve opening this low-pressure region was contin-uously enlarged and moved away from the valve seat to thevalversquos downstream chamber for 0012 slt tlt 0090 s A partof the low-pressure region also appeared at the top of thevalve housing At t 06 s the valve plug has attainedequilibrium and the low-pressure region was gradually notapparent Moreover we observed that the upper end of the
Pres
sure
inle
t
Pres
sure
out
let
50mm20mm Valve plug
Figure 9 Grid model for verification
Water properties
UserCosim block used to handle dataexchanges between soware types
Mass used to compute the forcebalance on the valve spool
Spring
Spool_VelocityUserCosim
InterfaceAMESimFLUENT
Fluid_Force
Figure 10 AMESim model for validation
1290
1300
1310
1320
1330
1340
1350
Plug
disp
lace
men
t (m
m)
2010 150500Time (s)
FLUENT simulationCosimulation
(a)
ndash7
ndash5
ndash3
ndash1
1
3
5
7
Flui
d lo
ad (N
)
20151000 05Time (s)
FLUENT simulationCosimulation
(b)
Figure 11 Comparison of the results of the pure FLUENT simulation and FLUENTAMESim cosimulation (a) Displacement response(b) Fluid load acting on valve plug
8 Science and Technology of Nuclear Installations
times104
times104
times104
10
13
16
19
22
25
Flui
d lo
ad (N
)
120
125
130
135
140
145
0001 0002 0003 0004 0005
001000 003 004002 005Time (s)
00130012 00150014 0016200
205
210
215
220
Figure 13 Transient variation of fluid loads on plug surfaces
0010
0015
0020
0025
0030
0035
0040
0045
Plug
disp
lace
men
t (m
)
0502 0600 0401 03Time (s)
(a)
20000
30000
40000
50000
60000
70000
80000
90000
Volu
me fl
ow ra
te (L
min
)
0502 0600 0401 03Time (s)
(b)
ndash150000
ndash100000
ndash50000
0
50000
100000
150000
200000
250000
300000
Flui
d lo
ad (N
)
0502 0600 0401 03Time (s)
(c)
ndash150000
ndash50000
50000
150000
250000
350000
450000
Driv
ing
forc
e (N
)
0502 04 0600 01 03Time (s)
(d)
Figure 12 Cosimulation results for the valversquos dynamic variation versus time (a) Valve plug displacement (b) Volume flow rate at the valveoutlet (c) Fluid load on the valve plug (d) Driving force of the actuator
Science and Technology of Nuclear Installations 9
t = 0001s t = 0007s t = 0012s
t = 0028s t = 0046s t = 0066s
t = 0090s t = 0150s t = 0600s
Pressure (Pa) 70E + 06 74E + 06 78E + 06 82E + 06 86E + 06 90E + 06 94E + 06 98E + 06
Figure 14 Pressure field distributions at different times
t = 0001s t = 0007s t = 0012s
t = 0028s t = 0046s t = 0066s
t = 0090s t = 0150s t = 0600s
8075706560555045403530252015105Velocity (ms)
Figure 15 Velocity magnitude distributions at different times
10 Science and Technology of Nuclear Installations
valve plug was attached to a low-pressure region which wasprone to cavitation resulting in potential damage to thevalve plug
For the pressure field of t 0007 s the fluid pressure inthe valve cavity decreased from the bottom face to the upperface of the valve plug and the maximum pressure in thevicinity of the bottom of the valve plug was approximately98MPa In the subsequent 5ms the area occupied by thehigh-pressure region on the lower half surface of the valveplug gradually expanded at t 0012 s in particular thepressure in the partial region was approximately 10MPaReferring to the fluid load curve obtained by AMESimshown in Figure 13 the fluid load acting on the valve plugcontinuously increased within this period (from t 0007 s tot 0012 s) e main reason was that as the valve plugmoved toward the closing direction during this period theflow area of the orifice region became smaller and thepressure fluctuation in the valve cavity increased which leadto a larger area of the high-pressure region on the lowersurface of the plug On the other hand the fluid load on thevalve plug was obtained by integrating the surface area of thevalve plug with the pressure distribution on the upper andlower surfaces of the valve plug us the increase of thepressure difference between the lower and upper surfaces ofthe valve plug made the fluid load increase A similarphenomenon occurred in the period from t 0090 to0150 s erefore the calculation results of AMESim wereobserved to correspond with those of FLUENT
Figure 15 shows the sequence of the velocity magnitudecontours In the initial opening process of the valve plug fortlt 0005 s the flow area at the orifice was small e flowchannels were in a strong throttling state which caused thefluid pressure to decrease and the velocity to increase in theorifice region As the fluid accelerated through the narrowgap of the orifice the valve seat functioned as a throatresulting in a jet at t 0007 s that hit the valve plug at highvelocities After t 0012 s the valve plug moved toward theclosing direction and an asymmetric jet occurred at bothsides of the valve seat e asymmetric accelerating fluidcaused the hydraulic inductance owing to inertia It acted onthe surface of the valve plug and coupled with the movingvalve plug as well as the uneven pressure gradient in thisregion which were the main reasons for variable and os-cillating fluid loads on the valve plug (see Figure 13)
From Figure 16 the velocity of the jet region was higherthan that of the nearby fluid region when the fluid flowedthrough the orifice In the first 10ms the high-speed andlow-speed streams were mixed in the nearby regionresulting in a strong shear effect which caused the formationof vortices in the low-speed region Owing to the structuralobstruction vortices appeared on the left side and top wall ofthe valve body where the fluid stagnated and its velocitydecreased At t 0012 s vortex production at the lip of thevalve seat resulted in unsteady shedding and a large amountof energy was removed the phenomenon of vortex sheddingchanged the pressure distribution around the valve seat (seeFigure 14) which caused a sudden change in the fluid loadon the valve plug Furthermore the jet spread out further tothe valversquos downstream chamber which cannot avoid the
flow pathrsquos bend resulting in the formation of a recirculationregion as shown at t 0028 s is recirculation regionexpanded to the bottom of the downstream pipeline andoccupied the flow channel space Consequently the main-stream fluid was squeezed and its flow direction wasdisturbed
42 Dynamic Studies Related to Different Valve Plugs Tofurther explore the dynamic performance of the controlvalve plug we changed the shape of the valve plug eprofile curves of two other valve plugs with the flow char-acteristics of quick-opening and equal percentage weredesigned according to the calculation formula of the in-herent flow characteristic [20 21] and the cosimulations forthese two valves were conducted During the simulationprocess the initial opening percentage of the valve plugdesired flow rate at valve outlet boundary conditions andsolution parameters were unchanged e simulation resultswere as follows
Figure 17 shows the variation in fluid loads on the valveplug under different plug shapes By comparison we ob-served that in the first 1ms the fluid load acting on the equalpercentage plug exhibited high-frequency oscillations alongthe horizontal axis which was far greater than that of thefluid load acting on the other two types of valve plugserefore more load compensation was needed for the equalpercentage plug in this time period e oscillation trend ofthe unstable fluid loads acting on the quick-opening plugwas similar to that of the linear plug which was charac-terized by irregular and pulse-like fluctuations and itsfluctuation amplitude was larger than that of the linear plugAs the valve opening increased the amplitude attenuation ofthe fluid load acting on the linear plug was the fastest eoscillating fluid loads experienced by three different types ofvalve plugs gradually decreased and then fluctuated within asmall range When the valve plug attained equilibrium thefluid load acting on the quick-opening plug was the largestwhereas the equal percentage plug was the smallest whichdiffers by approximately 13 times as shown in Table 2
Figure 18 shows the dynamic change in the flow rate atthe valve outlet As the initial displacement of the valve plugincreased the outlet flow rate for the control valve with theflow characteristic of equal percentage fluctuated signifi-cantly within 1mse flow behavior was consistent with thehigh-frequency oscillating fluid loads (Figure 17) the largerthe flow fluctuation the greater the oscillating amplitude ofthe fluid load on the valve plug is process produced animpulsive force on the valve plug which would causestructural failure When the outlet flow rate for the threecontrol valves with different flow characteristics tended tothe desired value all the valve plugs were balanced to achievethe goal of controlling the flow rate behind the valve
Figure 19 shows the flow curves when three controlvalves were in a stable state We observed that the outlet flowrate for every control valve was approximate to the targetvalue but it had a certain deviation from the desired valueand the deviation degree was less than 001 as shown inTable 3 In combination with the actual situation the valve
Science and Technology of Nuclear Installations 11
could not completely maintain the desired value because offactors such as its own structure and external interferenceduring the working process erefore this result suggestedthat after three types of control valves with flow charac-teristics of equal percentage quick-opening and linearattained equilibrium their outlet flow rate value with thedesired value had slight differences
On the other hand although the valve plug was balancedthe flow rate at the valve outlet still exhibited slight fluc-tuations near the desired value To compare the stability timeof different valve plugs we analyzed how fast the outlet flowrate stabilizes for each valve plug considering a deviation of01 (within the engineering allowable range) as the stabilitycriterion In other words when the outlet flow rate becameand remained in the range of 79920ndash80080 Lmin it wasconsidered to have attained stability Figure 19 and Table 3show that the outlet flow of the control valve with the flowcharacteristic of equal percentage was the first to attain therange of this zone and its stability time was the shortest Incontrast the control valve with the flow characteristic ofquick-opening lagged behind the other two valves
In summary when a certain pressure is given at the inletand outlet of the control valve (in this study the inlet andoutlet pressures were 10 and 8MPa respectively) the valveplug moves from a 10 opening to the balance position tocontrol the flow behind the valve e stability time of thecontrol valve with the flow characteristic of equal percentageis fast but this valve plug is subjected to sharply rapidlyoscillating fluid loads in the movement process the quick-opening valve plug takes a long time to attain stability andthe fluid load acting on the plug is large in the balanceposition e fluctuation amplitude of the fluid load appliedto the linear valve plug is relatively low and the damage tothis valve plug is small In practice the selection and design
t = 0001s
t = 0012s
t = 0066s
t = 0150s
t = 0007s
t = 0028s
t = 0090s
t = 0600s
8075706560555045403530252015105Velocity (ms)
Figure 16 Streamlines at different simulation times
times104
ndash5
0
5
10
15
20
25
30
Flui
d lo
ad (N
)
007 008003 006005004002001000Time (s)
times10ndash4
times106
ndash25ndash20ndash15ndash10
ndash505
2 864 100
LinearQuick-openingEqual percentage
Figure 17 Transient variation of fluid loads on different plugsurfaces
Table 2 Fluid load difference at the balance position for differentvalve plugs
e fluid loadon the plug Linear Quick-opening Equal percentage
At the balanceposition (N) 207867 223922 171488
12 Science and Technology of Nuclear Installations
requirements for the control valve plug are different owingto different working environments For example wheninvolving the high-security region on the warship thecontrol valve is required to respond rapidly in an emergencyto achieve rapid regulation erefore the valve plugrsquos
stability time is the focus and the valve plug with faststability time should be selected For control valves that workfrequently the valve plug is constantly in the process ofdynamic adjustment so we should choose the valve plugwith a smaller fluctuation amplitude of the fluid load
5 Conclusion
Based on the FSI a cosimulation for the mechanical-electric-fluid system of the control valve was performed using theFLUENT and AMESim platforms e interaction effectbetween the valve components and fluid flow was com-prehensively considered rough the coupling calculationand data exchange of the two software the opening curve ofthe control valve in the dynamic adjustment process wasobtained e UDF and dynamic mesh technology were alsoused to solve the problem of instantaneous changes in thecalculation region caused by the valve plug movement
Compared with the pure simulations this study per-formed a synchronous analysis of the unsteady flow fieldcharacteristics in the valve cavity and the dynamic responseof the actuator As the valve plug dynamically moved aplurality of low-pressure zones of different sizes appeared inthe valve chamber because of the FSI effect e jet flowformed by the asymmetric high-speed fluid near the valveseat area was accompanied by the vortex shedding phe-nomenon Moreover we observed that the valve plug surfacewas subjected to unstable and oscillating fluid loads whicheasily caused the valve plug to vibrate ese dynamicsimulation results can give theoretical guidance for accu-rately compensating the additional fluid load on the valveplug
e behavior of the control valve with different flowcharacteristics was compared by changing the valve plugshape For inlet and outlet pressures of the control valve of10 and 8MPa respectively the valve plug beginning to movefrom the 10 opening position the results indicated that thecontrol valve with the flow characteristic of equal percentagewas sensitive to the effect of the fluid flowe fluctuation inthe flow rate at this valve outlet and the oscillation of thefluid load acting on this valve plug were high for a smallopening exceeding those of the control valves with the flowcharacteristics of quick-opening and linear And more loadcompensation was required for the equal percentage plug Inaddition the control valve with the flow characteristic ofequal percentage was the first to attain equilibrium with thefastest stability time whereas the control valve with the flowcharacteristic of quick-opening was the slowest When thecontrol valve was stable the deviation between the outletflow rate value and the desired value for every type of controlvalve with three different flow characteristics was negligible
times104
0
1
2
3
4
5
6
7
8
9
10
Volu
me fl
ow ra
te (L
min
)
006 008002 004000Time (s)
times10ndash4
times104
150 105 2030354045505560
LinearQuick-openingEqual percentage
Figure 18 Outlet flow rate of the control valve corresponding todifferent plugs
times104
2
3
4
5
6
7
8
9
Volu
me fl
ow ra
te (L
min
)
01 04 0600 02 0503Time (s)
79920
80080
80000
80003
060504030201
LinearQuick-openingEqual percentage
Figure 19 Outlet flow rate of the control valve corresponding todifferent plugs in the balance position
Table 3 Flow rate difference in stable value and stable time fordifferent valve plugs
e flow rate atvalve outlet Linear Quick-opening Equal
percentageStable value (Lmin) 8000085 8000115 8000183Stability time (s) 0198 0245 0187
Science and Technology of Nuclear Installations 13
Owing to the various types of warship control valves theoperating characteristics of the valves should be completelymastered according to the actual working environmentswhen selecting them is study provides a new insightscheme on the dynamic analysis and performance evaluationin control valves e results are significant to reduce thefailure rate of the warship control valve improve the controlaccuracy and prolong the life of the valve
Data Availability
e data used to support the findings of this study are in-cluded within the article
Conflicts of Interest
e authors declare no conflicts of interest
Acknowledgments
is research was funded by the National Natural ScienceFoundation of China (Grant nos 51775310 and 51875316) theKey Research and Development Project of Shandong Province(Grant no 2019GHY112052) the Natural Science Foundationof Shandong Province (Grant no ZR2019MEE025) the Na-tional Key Research and Development Project of China (Grantno 2016YFD0701104) and the Project for Scientific ResearchInnovation Team of Young Scholar in Colleges and Univer-sities of Shandong Province (Grant no 2020KJB001)
References
[1] V Ahuja A Hosangadi P Cavallo and R Daines ldquoAnalysesof transient events in complex valve and feed systemsrdquo inProceedings Of the 41st AIAAASMESAEASEE Joint Pro-pulsion Conference And Exhibit pp 1ndash13 Tucson AZ USAJuly 2005
[2] P A Cavallo A Hosangadi and V Ahuja ldquoTransient sim-ulations of valve motion in cryogenic systemsrdquo in ProceedingsOf the 35th AIAA Fluid Dynamics Conference And Exhibitpp 1ndash11 Toronto Ontario Canada June 2005
[3] J Shipman A Hosangadi and V Ahuja ldquoUnsteady analysesof valve systems in rocket engine testing environmentsrdquo inProceedings Of the 40th AIAAASMESAEASEE Joint Pro-pulsion Conference And Exhibit pp 1ndash10 Fort LauderdaleFlorida USA July 2004
[4] B K Saha H Chattopadhyay P B Mandal andT Gangopadhyay ldquoDynamic simulation of a pressure regu-lating and shut-off valverdquo Computers amp Fluids vol 101pp 233ndash240 2014
[5] A Beune J G M Kuerten and M P C van Heumen ldquoCFDanalysis with fluid-structure interaction of opening high-pressure safety valvesrdquo Computers amp Fluids vol 64 no 3pp 108ndash116 2012
[6] R Morita F Inada M Mori K Tezuka and Y TsujimotoldquoCFD simulations and experiments of flow fluctuationsaround a steam control valverdquo Journal of Fluids Engineeringvol 129 no 1 pp 48ndash54 2007
[7] A Misra K Behdinan and W L Cleghorn ldquoSelf-excitedvibration of a control valve due to fluid-structure interactionrdquoJournal of Fluids and Structures vol 16 no 5 pp 649ndash6652002
[8] K Yonezawa R Ogawa K Ogi et al ldquoFlow-induced vibrationof a steam control valverdquo Journal of Fluids and Structuresvol 35 no 776 pp 76ndash88 2012
[9] C Bolin and A Engeda ldquoAnalysis of flow-induced instabilityin a redesigned steam control valverdquo Applied ermal En-gineering vol 83 pp 40ndash47 2015
[10] G Palau-Salvador P Gonzalez-Altozano and J Arviza-Valverde ldquoree-dimensional modeling and geometricalinfluence on the hydraulic performance of a control valverdquoJournal of Fluids Engineering vol 130 no 1 pp 151ndash1632008
[11] Y Xie Y Wang Y Liu F Cao and Y Pan ldquoUnsteadyanalyses of a control valve due to fluid-structure couplingrdquoMathematical Problems in Engineering vol 2013 Article ID174731 7 pages 2013
[12] J Tecza G Chochua and R Moll ldquoAnalysis of fluid-structureinteraction in a steam turbine throttle valverdquo in ProceedingsOf the ASME Turbo Expo Power for Land Sea and Airpp 2329ndash2338 Glasgow UK June 2010
[13] X Sun X Li Z Zheng and D Huang ldquoFluid-structure in-teraction analysis of a high-pressure regulating valve of a 600-MW ultra-supercritical steam turbinerdquo Proceedings of theInstitution of Mechanical Engineers Part A Journal of Powerand Energy vol 229 no 3 pp 270ndash279 2015
[14] H Wang M-j Peng Y-k Liu S-w Liu R-y Xu andH Saeed ldquoRemaining useful life prediction techniques ofelectric valves for nuclear power plants with convolutionkernel and LSTMrdquo Science and Technology of Nuclear In-stallations vol 2020 pp 1ndash13 2020
[15] R Fadaeinedjad M Moallem and G Moschopoulos ldquoSim-ulation of a wind turbine with doubly fed induction generatorby FAST and Simulinkrdquo IEEE Transactions on Energy Con-version vol 23 no 2 pp 690ndash700 2008
[16] R Zhang K P Lam S-c Yao and Y Zhang ldquoCoupledEnergyPlus and Computational Fluid Dynamics Simulationfor Natural Ventilationrdquo Building and Environment vol 68pp 100ndash113 2013
[17] T Kerh J J Lee and L C Wellford ldquoTransient fluid-structure interaction in a control valverdquo Journal of FluidsEngineering vol 119 no 2 pp 354ndash359 1997
[18] R Messahel C Regan M H Souli and C Ruiu ldquoNumericalinvestigation of homogeneous equilibrium model and fluid-structure interaction for multiphase water flows in pipesrdquoInternational Journal of Multiphase Flow vol 98 pp 56ndash662018
[19] LMS LMS ImagineLab AMESim Generic Co-simulation Rev13 Userrsquos Guide Roanne France 2013
[20] Emerson Electric Co Control Valve Handbook Lowa USA2005
[21] B Fitzgerald Control Valves for the Chemical Process In-dustries McGraw-Hill New York NY USA 1995
[22] V Yakhot and S A Orszag ldquoRenormalization group analysisof turbulence I Basic eoryrdquo Journal of Scientific Com-puting vol 1 no 1 pp 3ndash51 1986
[23] L Wang J Cui and K Yao ldquoNumerical simulation and analysisof gas flow field in serrated valve columnrdquo Chinese Journal ofChemical Engineering vol 16 no 4 pp 541ndash546 2008
[24] J-Y Qian Z-X Gao J-K Wang and Z-J Jin ldquoExperimentaland numerical analysis of spring stiffness on flow and valvecore movement in pilot control globe valverdquo InternationalJournal of Hydrogen Energy vol 42 no 27 pp 17192ndash172012017
14 Science and Technology of Nuclear Installations

AMESim cosimulation with the same parametersemodelwas based on a simplified spring-loaded check valve egoverning equation for this motion of the valve is expressedas follows
Fprime(t) kX(t) + Ffprime + mprime euroX (t) Ff
prime c _X(t)1113966 (4)
where Fprime(t) is the fluid load on the valve plug X(t) _X(t)and euroX(t) are the displacement velocity and acceleration ofthe valve plug respectively k is the stiffness of the spring mprimeis the mass of the valve plug c is the equivalent viscousdamping coefficient and the friction force of the valve plugFfprime is also equivalent to a viscous damping force which is
proportional to the speed of the valve plugIn the pure FLUENT simulation the valve plug motion
was solved using an iterative scheme based on the classicalRunge-Kutta method When the number of iteration timesteps was zero the valve was in a static statee accelerationof the valve plug euroX
n(t) at n time steps was calculated by
using the following equation
euroXn
(t) Fprimen(t) minus kX
n(t) minus c _X
n(t)
mprime (5)
where Fprimen(t) is the fluid load on the valve plug Xn(t) is thedisplacement of the valve plug and _X
n(t) is the velocity of
the valve plug at n number of time stepsen the displacement Xn+1(t) and velocity _X
n+1(t) of
the valve plug motion at the next number of time steps n + 1become
Xn+1
(t) Xn(t) + _X
n(t)Δt +
12
euroXn(t)Δt2
_Xn+1
(t) _Xn(t) + euroX
n(t)Δt
(6)
where Δt is the time stepe UDF was compiled to achieve the iteration scheme
and it was loaded into the FLUENT solver to control themovement of the valve plug More detailed settings andinformation related to the grid independence study and theselection of the time step for FLUENT calculations arediscussed in Section 33 e final grid model of the checkvalve is shown in Figure 9
In the FLUENTAMESim cosimulation a cosimulationmodel for the data exchange module and the spring systemwas established in the AMESim solver as shown in Fig-ure 10 e valve plug was represented by a mass For theexchanged variables between the two solvers FLUENTcalculated the fluid load on the valve plug based on Equa-tions (1) and (2) is fluid load was input to AMESim tosimulate the spring system based on Equation (4) efeedback on the velocity of the valve plug from AMESimwas in turn delivered to FLUENT to update the valve plugposition for the next iteration
Figure 11 shows a comparison of the results of thedisplacement response and fluid load on the valve plugbetween the pure FLUENT simulation and FLUENTAMESim cosimulation with the same parameters A goodagreement was observed which demonstrated the feasibilityof the coupled scheme
4 Results
41 Dynamic Studies Related to Valve Timing In the initialsimulation status the inlet and outlet pressures of thecontrol valve were 10 and 8MPa respectively Meanwhilethe valve opening was maintained at 10 First a steadysimulation using FLUENT was conducted to obtain a stableflow field and the flow rate at the valve outlet was 25820 Lmin en the cosimulation was performed for transientcalculation under the condition of setting the same time step(in AMESim and FLUENT solvers) residual accuracy (inFLUENT solver) and calculation tolerance (in AMESimsolver) Additionally the number of internal maximum it-erations for a single time step was set in the FLUENT solverso that the dynamic simulation can converge at each timestep e outlet flow rate set by the PID controller was80000 Lmin To attain the desired value of the outlet flowrate the actuator of the control valve adjusted the openingand closing of the valve plug according to the output signalof the controller When the flow rate at the valve outletattained the target value the valve opening no longerchanged at a balanced position and the cosimulationachieved convergence
Figure 12 shows the dynamic curves of the valve plugdisplacement flow rate at the valve outlet fluid load anddriving force of the actuator acting on the valve plug andvalve stem during the dynamic change of the valve openingIn the first 7ms the fluid load acting on the valve plugexhibited an oscillating and unstable form whereas thedriving force of the actuator originally increased and thendecreased And the direction of these two forces changedduring this period of time When the valve plug displace-ment increased to the first peak value of 40mm the valveopening was approximately 36 In this process the flowrate at the valve outlet transformed from a sharp accelerationwith a large curve slope to a linear acceleration which wasrelated to the increase and decrease in the valve plug speedSubsequently the valve plug moved toward the closingdirection and the flow rate variation at the valve outletslowed down After exceeding 4 of the desired flow valuethe outlet flow rate gradually decreased Since the signaldifference received by the PID controller was not zero thevalve plug continued to adjust continuously and its dis-placement again exhibited several decaying fluctuationsEventually at time t 035 s the flow rate at the valve outletwas approximately 80000 Lmin e valve plug remained ata final opening of 30 with a very small fluctuation Si-multaneously the resultant force of the valve plug wasapproximately zero which indicated that the fluid load anddriving force of the actuator acting on the plug tended to bestable but there was a slight fluctuation
A warship environment is complex and changeableWith the leaping change in the shiprsquos working conditionswhen a warship implements many complicated actions oftactics and techniques the valve plug is subjected to randomand oscillating fluid loads in the process of dynamic ad-justment especially from t 0001 s to t 0005 s andt 0012 s to t 0016 s (see Figure 13) e resultant force ofthis fluid load and driving force of the actuator may be
Science and Technology of Nuclear Installations 7
greater or less than the actual adjustment force required bythe valve plug reducing the control precision of the controlvalve Furthermore oscillating fluid loads can cause vibra-tion noise and other hazards on the valve plug ereforethe oscillating fluid loads need to be compensated on de-mand to reduce the valve plug oscillation and improve thestability of the control valve
Figures 14 and 15 depict the pressure field and velocitydistributions in the valve chamber during the valve plugmovement For the period of the simulation the mostrepresentative time points were selected e pressure dis-tributions in Figure 14 show that the pressure of the flowchannel showed a decreasing trend from the pipeline inlet tothe pipeline outlet from t 0001 s to t 06 s In the orifice
region between the valve plug and valve seat the flow areawas limited and the pressure drop was large the pressuredrop primarily overcame the resistance of the flow channelin the control valve As the valve plug moved from the firstmaximum displacement (at time t 0007 s) to the closingdirection a low-pressure region was generated on the side ofthe valve plug and seat Along with the dynamic adjustmentof the valve opening this low-pressure region was contin-uously enlarged and moved away from the valve seat to thevalversquos downstream chamber for 0012 slt tlt 0090 s A partof the low-pressure region also appeared at the top of thevalve housing At t 06 s the valve plug has attainedequilibrium and the low-pressure region was gradually notapparent Moreover we observed that the upper end of the
Pres
sure
inle
t
Pres
sure
out
let
50mm20mm Valve plug
Figure 9 Grid model for verification
Water properties
UserCosim block used to handle dataexchanges between soware types
Mass used to compute the forcebalance on the valve spool
Spring
Spool_VelocityUserCosim
InterfaceAMESimFLUENT
Fluid_Force
Figure 10 AMESim model for validation
1290
1300
1310
1320
1330
1340
1350
Plug
disp
lace
men
t (m
m)
2010 150500Time (s)
FLUENT simulationCosimulation
(a)
ndash7
ndash5
ndash3
ndash1
1
3
5
7
Flui
d lo
ad (N
)
20151000 05Time (s)
FLUENT simulationCosimulation
(b)
Figure 11 Comparison of the results of the pure FLUENT simulation and FLUENTAMESim cosimulation (a) Displacement response(b) Fluid load acting on valve plug
8 Science and Technology of Nuclear Installations
times104
times104
times104
10
13
16
19
22
25
Flui
d lo
ad (N
)
120
125
130
135
140
145
0001 0002 0003 0004 0005
001000 003 004002 005Time (s)
00130012 00150014 0016200
205
210
215
220
Figure 13 Transient variation of fluid loads on plug surfaces
0010
0015
0020
0025
0030
0035
0040
0045
Plug
disp
lace
men
t (m
)
0502 0600 0401 03Time (s)
(a)
20000
30000
40000
50000
60000
70000
80000
90000
Volu
me fl
ow ra
te (L
min
)
0502 0600 0401 03Time (s)
(b)
ndash150000
ndash100000
ndash50000
0
50000
100000
150000
200000
250000
300000
Flui
d lo
ad (N
)
0502 0600 0401 03Time (s)
(c)
ndash150000
ndash50000
50000
150000
250000
350000
450000
Driv
ing
forc
e (N
)
0502 04 0600 01 03Time (s)
(d)
Figure 12 Cosimulation results for the valversquos dynamic variation versus time (a) Valve plug displacement (b) Volume flow rate at the valveoutlet (c) Fluid load on the valve plug (d) Driving force of the actuator
Science and Technology of Nuclear Installations 9
t = 0001s t = 0007s t = 0012s
t = 0028s t = 0046s t = 0066s
t = 0090s t = 0150s t = 0600s
Pressure (Pa) 70E + 06 74E + 06 78E + 06 82E + 06 86E + 06 90E + 06 94E + 06 98E + 06
Figure 14 Pressure field distributions at different times
t = 0001s t = 0007s t = 0012s
t = 0028s t = 0046s t = 0066s
t = 0090s t = 0150s t = 0600s
8075706560555045403530252015105Velocity (ms)
Figure 15 Velocity magnitude distributions at different times
10 Science and Technology of Nuclear Installations
valve plug was attached to a low-pressure region which wasprone to cavitation resulting in potential damage to thevalve plug
For the pressure field of t 0007 s the fluid pressure inthe valve cavity decreased from the bottom face to the upperface of the valve plug and the maximum pressure in thevicinity of the bottom of the valve plug was approximately98MPa In the subsequent 5ms the area occupied by thehigh-pressure region on the lower half surface of the valveplug gradually expanded at t 0012 s in particular thepressure in the partial region was approximately 10MPaReferring to the fluid load curve obtained by AMESimshown in Figure 13 the fluid load acting on the valve plugcontinuously increased within this period (from t 0007 s tot 0012 s) e main reason was that as the valve plugmoved toward the closing direction during this period theflow area of the orifice region became smaller and thepressure fluctuation in the valve cavity increased which leadto a larger area of the high-pressure region on the lowersurface of the plug On the other hand the fluid load on thevalve plug was obtained by integrating the surface area of thevalve plug with the pressure distribution on the upper andlower surfaces of the valve plug us the increase of thepressure difference between the lower and upper surfaces ofthe valve plug made the fluid load increase A similarphenomenon occurred in the period from t 0090 to0150 s erefore the calculation results of AMESim wereobserved to correspond with those of FLUENT
Figure 15 shows the sequence of the velocity magnitudecontours In the initial opening process of the valve plug fortlt 0005 s the flow area at the orifice was small e flowchannels were in a strong throttling state which caused thefluid pressure to decrease and the velocity to increase in theorifice region As the fluid accelerated through the narrowgap of the orifice the valve seat functioned as a throatresulting in a jet at t 0007 s that hit the valve plug at highvelocities After t 0012 s the valve plug moved toward theclosing direction and an asymmetric jet occurred at bothsides of the valve seat e asymmetric accelerating fluidcaused the hydraulic inductance owing to inertia It acted onthe surface of the valve plug and coupled with the movingvalve plug as well as the uneven pressure gradient in thisregion which were the main reasons for variable and os-cillating fluid loads on the valve plug (see Figure 13)
From Figure 16 the velocity of the jet region was higherthan that of the nearby fluid region when the fluid flowedthrough the orifice In the first 10ms the high-speed andlow-speed streams were mixed in the nearby regionresulting in a strong shear effect which caused the formationof vortices in the low-speed region Owing to the structuralobstruction vortices appeared on the left side and top wall ofthe valve body where the fluid stagnated and its velocitydecreased At t 0012 s vortex production at the lip of thevalve seat resulted in unsteady shedding and a large amountof energy was removed the phenomenon of vortex sheddingchanged the pressure distribution around the valve seat (seeFigure 14) which caused a sudden change in the fluid loadon the valve plug Furthermore the jet spread out further tothe valversquos downstream chamber which cannot avoid the
flow pathrsquos bend resulting in the formation of a recirculationregion as shown at t 0028 s is recirculation regionexpanded to the bottom of the downstream pipeline andoccupied the flow channel space Consequently the main-stream fluid was squeezed and its flow direction wasdisturbed
42 Dynamic Studies Related to Different Valve Plugs Tofurther explore the dynamic performance of the controlvalve plug we changed the shape of the valve plug eprofile curves of two other valve plugs with the flow char-acteristics of quick-opening and equal percentage weredesigned according to the calculation formula of the in-herent flow characteristic [20 21] and the cosimulations forthese two valves were conducted During the simulationprocess the initial opening percentage of the valve plugdesired flow rate at valve outlet boundary conditions andsolution parameters were unchanged e simulation resultswere as follows
Figure 17 shows the variation in fluid loads on the valveplug under different plug shapes By comparison we ob-served that in the first 1ms the fluid load acting on the equalpercentage plug exhibited high-frequency oscillations alongthe horizontal axis which was far greater than that of thefluid load acting on the other two types of valve plugserefore more load compensation was needed for the equalpercentage plug in this time period e oscillation trend ofthe unstable fluid loads acting on the quick-opening plugwas similar to that of the linear plug which was charac-terized by irregular and pulse-like fluctuations and itsfluctuation amplitude was larger than that of the linear plugAs the valve opening increased the amplitude attenuation ofthe fluid load acting on the linear plug was the fastest eoscillating fluid loads experienced by three different types ofvalve plugs gradually decreased and then fluctuated within asmall range When the valve plug attained equilibrium thefluid load acting on the quick-opening plug was the largestwhereas the equal percentage plug was the smallest whichdiffers by approximately 13 times as shown in Table 2
Figure 18 shows the dynamic change in the flow rate atthe valve outlet As the initial displacement of the valve plugincreased the outlet flow rate for the control valve with theflow characteristic of equal percentage fluctuated signifi-cantly within 1mse flow behavior was consistent with thehigh-frequency oscillating fluid loads (Figure 17) the largerthe flow fluctuation the greater the oscillating amplitude ofthe fluid load on the valve plug is process produced animpulsive force on the valve plug which would causestructural failure When the outlet flow rate for the threecontrol valves with different flow characteristics tended tothe desired value all the valve plugs were balanced to achievethe goal of controlling the flow rate behind the valve
Figure 19 shows the flow curves when three controlvalves were in a stable state We observed that the outlet flowrate for every control valve was approximate to the targetvalue but it had a certain deviation from the desired valueand the deviation degree was less than 001 as shown inTable 3 In combination with the actual situation the valve
Science and Technology of Nuclear Installations 11
could not completely maintain the desired value because offactors such as its own structure and external interferenceduring the working process erefore this result suggestedthat after three types of control valves with flow charac-teristics of equal percentage quick-opening and linearattained equilibrium their outlet flow rate value with thedesired value had slight differences
On the other hand although the valve plug was balancedthe flow rate at the valve outlet still exhibited slight fluc-tuations near the desired value To compare the stability timeof different valve plugs we analyzed how fast the outlet flowrate stabilizes for each valve plug considering a deviation of01 (within the engineering allowable range) as the stabilitycriterion In other words when the outlet flow rate becameand remained in the range of 79920ndash80080 Lmin it wasconsidered to have attained stability Figure 19 and Table 3show that the outlet flow of the control valve with the flowcharacteristic of equal percentage was the first to attain therange of this zone and its stability time was the shortest Incontrast the control valve with the flow characteristic ofquick-opening lagged behind the other two valves
In summary when a certain pressure is given at the inletand outlet of the control valve (in this study the inlet andoutlet pressures were 10 and 8MPa respectively) the valveplug moves from a 10 opening to the balance position tocontrol the flow behind the valve e stability time of thecontrol valve with the flow characteristic of equal percentageis fast but this valve plug is subjected to sharply rapidlyoscillating fluid loads in the movement process the quick-opening valve plug takes a long time to attain stability andthe fluid load acting on the plug is large in the balanceposition e fluctuation amplitude of the fluid load appliedto the linear valve plug is relatively low and the damage tothis valve plug is small In practice the selection and design
t = 0001s
t = 0012s
t = 0066s
t = 0150s
t = 0007s
t = 0028s
t = 0090s
t = 0600s
8075706560555045403530252015105Velocity (ms)
Figure 16 Streamlines at different simulation times
times104
ndash5
0
5
10
15
20
25
30
Flui
d lo
ad (N
)
007 008003 006005004002001000Time (s)
times10ndash4
times106
ndash25ndash20ndash15ndash10
ndash505
2 864 100
LinearQuick-openingEqual percentage
Figure 17 Transient variation of fluid loads on different plugsurfaces
Table 2 Fluid load difference at the balance position for differentvalve plugs
e fluid loadon the plug Linear Quick-opening Equal percentage
At the balanceposition (N) 207867 223922 171488
12 Science and Technology of Nuclear Installations
requirements for the control valve plug are different owingto different working environments For example wheninvolving the high-security region on the warship thecontrol valve is required to respond rapidly in an emergencyto achieve rapid regulation erefore the valve plugrsquos
stability time is the focus and the valve plug with faststability time should be selected For control valves that workfrequently the valve plug is constantly in the process ofdynamic adjustment so we should choose the valve plugwith a smaller fluctuation amplitude of the fluid load
5 Conclusion
Based on the FSI a cosimulation for the mechanical-electric-fluid system of the control valve was performed using theFLUENT and AMESim platforms e interaction effectbetween the valve components and fluid flow was com-prehensively considered rough the coupling calculationand data exchange of the two software the opening curve ofthe control valve in the dynamic adjustment process wasobtained e UDF and dynamic mesh technology were alsoused to solve the problem of instantaneous changes in thecalculation region caused by the valve plug movement
Compared with the pure simulations this study per-formed a synchronous analysis of the unsteady flow fieldcharacteristics in the valve cavity and the dynamic responseof the actuator As the valve plug dynamically moved aplurality of low-pressure zones of different sizes appeared inthe valve chamber because of the FSI effect e jet flowformed by the asymmetric high-speed fluid near the valveseat area was accompanied by the vortex shedding phe-nomenon Moreover we observed that the valve plug surfacewas subjected to unstable and oscillating fluid loads whicheasily caused the valve plug to vibrate ese dynamicsimulation results can give theoretical guidance for accu-rately compensating the additional fluid load on the valveplug
e behavior of the control valve with different flowcharacteristics was compared by changing the valve plugshape For inlet and outlet pressures of the control valve of10 and 8MPa respectively the valve plug beginning to movefrom the 10 opening position the results indicated that thecontrol valve with the flow characteristic of equal percentagewas sensitive to the effect of the fluid flowe fluctuation inthe flow rate at this valve outlet and the oscillation of thefluid load acting on this valve plug were high for a smallopening exceeding those of the control valves with the flowcharacteristics of quick-opening and linear And more loadcompensation was required for the equal percentage plug Inaddition the control valve with the flow characteristic ofequal percentage was the first to attain equilibrium with thefastest stability time whereas the control valve with the flowcharacteristic of quick-opening was the slowest When thecontrol valve was stable the deviation between the outletflow rate value and the desired value for every type of controlvalve with three different flow characteristics was negligible
times104
0
1
2
3
4
5
6
7
8
9
10
Volu
me fl
ow ra
te (L
min
)
006 008002 004000Time (s)
times10ndash4
times104
150 105 2030354045505560
LinearQuick-openingEqual percentage
Figure 18 Outlet flow rate of the control valve corresponding todifferent plugs
times104
2
3
4
5
6
7
8
9
Volu
me fl
ow ra
te (L
min
)
01 04 0600 02 0503Time (s)
79920
80080
80000
80003
060504030201
LinearQuick-openingEqual percentage
Figure 19 Outlet flow rate of the control valve corresponding todifferent plugs in the balance position
Table 3 Flow rate difference in stable value and stable time fordifferent valve plugs
e flow rate atvalve outlet Linear Quick-opening Equal
percentageStable value (Lmin) 8000085 8000115 8000183Stability time (s) 0198 0245 0187
Science and Technology of Nuclear Installations 13
Owing to the various types of warship control valves theoperating characteristics of the valves should be completelymastered according to the actual working environmentswhen selecting them is study provides a new insightscheme on the dynamic analysis and performance evaluationin control valves e results are significant to reduce thefailure rate of the warship control valve improve the controlaccuracy and prolong the life of the valve
Data Availability
e data used to support the findings of this study are in-cluded within the article
Conflicts of Interest
e authors declare no conflicts of interest
Acknowledgments
is research was funded by the National Natural ScienceFoundation of China (Grant nos 51775310 and 51875316) theKey Research and Development Project of Shandong Province(Grant no 2019GHY112052) the Natural Science Foundationof Shandong Province (Grant no ZR2019MEE025) the Na-tional Key Research and Development Project of China (Grantno 2016YFD0701104) and the Project for Scientific ResearchInnovation Team of Young Scholar in Colleges and Univer-sities of Shandong Province (Grant no 2020KJB001)
References
[1] V Ahuja A Hosangadi P Cavallo and R Daines ldquoAnalysesof transient events in complex valve and feed systemsrdquo inProceedings Of the 41st AIAAASMESAEASEE Joint Pro-pulsion Conference And Exhibit pp 1ndash13 Tucson AZ USAJuly 2005
[2] P A Cavallo A Hosangadi and V Ahuja ldquoTransient sim-ulations of valve motion in cryogenic systemsrdquo in ProceedingsOf the 35th AIAA Fluid Dynamics Conference And Exhibitpp 1ndash11 Toronto Ontario Canada June 2005
[3] J Shipman A Hosangadi and V Ahuja ldquoUnsteady analysesof valve systems in rocket engine testing environmentsrdquo inProceedings Of the 40th AIAAASMESAEASEE Joint Pro-pulsion Conference And Exhibit pp 1ndash10 Fort LauderdaleFlorida USA July 2004
[4] B K Saha H Chattopadhyay P B Mandal andT Gangopadhyay ldquoDynamic simulation of a pressure regu-lating and shut-off valverdquo Computers amp Fluids vol 101pp 233ndash240 2014
[5] A Beune J G M Kuerten and M P C van Heumen ldquoCFDanalysis with fluid-structure interaction of opening high-pressure safety valvesrdquo Computers amp Fluids vol 64 no 3pp 108ndash116 2012
[6] R Morita F Inada M Mori K Tezuka and Y TsujimotoldquoCFD simulations and experiments of flow fluctuationsaround a steam control valverdquo Journal of Fluids Engineeringvol 129 no 1 pp 48ndash54 2007
[7] A Misra K Behdinan and W L Cleghorn ldquoSelf-excitedvibration of a control valve due to fluid-structure interactionrdquoJournal of Fluids and Structures vol 16 no 5 pp 649ndash6652002
[8] K Yonezawa R Ogawa K Ogi et al ldquoFlow-induced vibrationof a steam control valverdquo Journal of Fluids and Structuresvol 35 no 776 pp 76ndash88 2012
[9] C Bolin and A Engeda ldquoAnalysis of flow-induced instabilityin a redesigned steam control valverdquo Applied ermal En-gineering vol 83 pp 40ndash47 2015
[10] G Palau-Salvador P Gonzalez-Altozano and J Arviza-Valverde ldquoree-dimensional modeling and geometricalinfluence on the hydraulic performance of a control valverdquoJournal of Fluids Engineering vol 130 no 1 pp 151ndash1632008
[11] Y Xie Y Wang Y Liu F Cao and Y Pan ldquoUnsteadyanalyses of a control valve due to fluid-structure couplingrdquoMathematical Problems in Engineering vol 2013 Article ID174731 7 pages 2013
[12] J Tecza G Chochua and R Moll ldquoAnalysis of fluid-structureinteraction in a steam turbine throttle valverdquo in ProceedingsOf the ASME Turbo Expo Power for Land Sea and Airpp 2329ndash2338 Glasgow UK June 2010
[13] X Sun X Li Z Zheng and D Huang ldquoFluid-structure in-teraction analysis of a high-pressure regulating valve of a 600-MW ultra-supercritical steam turbinerdquo Proceedings of theInstitution of Mechanical Engineers Part A Journal of Powerand Energy vol 229 no 3 pp 270ndash279 2015
[14] H Wang M-j Peng Y-k Liu S-w Liu R-y Xu andH Saeed ldquoRemaining useful life prediction techniques ofelectric valves for nuclear power plants with convolutionkernel and LSTMrdquo Science and Technology of Nuclear In-stallations vol 2020 pp 1ndash13 2020
[15] R Fadaeinedjad M Moallem and G Moschopoulos ldquoSim-ulation of a wind turbine with doubly fed induction generatorby FAST and Simulinkrdquo IEEE Transactions on Energy Con-version vol 23 no 2 pp 690ndash700 2008
[16] R Zhang K P Lam S-c Yao and Y Zhang ldquoCoupledEnergyPlus and Computational Fluid Dynamics Simulationfor Natural Ventilationrdquo Building and Environment vol 68pp 100ndash113 2013
[17] T Kerh J J Lee and L C Wellford ldquoTransient fluid-structure interaction in a control valverdquo Journal of FluidsEngineering vol 119 no 2 pp 354ndash359 1997
[18] R Messahel C Regan M H Souli and C Ruiu ldquoNumericalinvestigation of homogeneous equilibrium model and fluid-structure interaction for multiphase water flows in pipesrdquoInternational Journal of Multiphase Flow vol 98 pp 56ndash662018
[19] LMS LMS ImagineLab AMESim Generic Co-simulation Rev13 Userrsquos Guide Roanne France 2013
[20] Emerson Electric Co Control Valve Handbook Lowa USA2005
[21] B Fitzgerald Control Valves for the Chemical Process In-dustries McGraw-Hill New York NY USA 1995
[22] V Yakhot and S A Orszag ldquoRenormalization group analysisof turbulence I Basic eoryrdquo Journal of Scientific Com-puting vol 1 no 1 pp 3ndash51 1986
[23] L Wang J Cui and K Yao ldquoNumerical simulation and analysisof gas flow field in serrated valve columnrdquo Chinese Journal ofChemical Engineering vol 16 no 4 pp 541ndash546 2008
[24] J-Y Qian Z-X Gao J-K Wang and Z-J Jin ldquoExperimentaland numerical analysis of spring stiffness on flow and valvecore movement in pilot control globe valverdquo InternationalJournal of Hydrogen Energy vol 42 no 27 pp 17192ndash172012017
14 Science and Technology of Nuclear Installations

greater or less than the actual adjustment force required bythe valve plug reducing the control precision of the controlvalve Furthermore oscillating fluid loads can cause vibra-tion noise and other hazards on the valve plug ereforethe oscillating fluid loads need to be compensated on de-mand to reduce the valve plug oscillation and improve thestability of the control valve
Figures 14 and 15 depict the pressure field and velocitydistributions in the valve chamber during the valve plugmovement For the period of the simulation the mostrepresentative time points were selected e pressure dis-tributions in Figure 14 show that the pressure of the flowchannel showed a decreasing trend from the pipeline inlet tothe pipeline outlet from t 0001 s to t 06 s In the orifice
region between the valve plug and valve seat the flow areawas limited and the pressure drop was large the pressuredrop primarily overcame the resistance of the flow channelin the control valve As the valve plug moved from the firstmaximum displacement (at time t 0007 s) to the closingdirection a low-pressure region was generated on the side ofthe valve plug and seat Along with the dynamic adjustmentof the valve opening this low-pressure region was contin-uously enlarged and moved away from the valve seat to thevalversquos downstream chamber for 0012 slt tlt 0090 s A partof the low-pressure region also appeared at the top of thevalve housing At t 06 s the valve plug has attainedequilibrium and the low-pressure region was gradually notapparent Moreover we observed that the upper end of the
Pres
sure
inle
t
Pres
sure
out
let
50mm20mm Valve plug
Figure 9 Grid model for verification
Water properties
UserCosim block used to handle dataexchanges between soware types
Mass used to compute the forcebalance on the valve spool
Spring
Spool_VelocityUserCosim
InterfaceAMESimFLUENT
Fluid_Force
Figure 10 AMESim model for validation
1290
1300
1310
1320
1330
1340
1350
Plug
disp
lace
men
t (m
m)
2010 150500Time (s)
FLUENT simulationCosimulation
(a)
ndash7
ndash5
ndash3
ndash1
1
3
5
7
Flui
d lo
ad (N
)
20151000 05Time (s)
FLUENT simulationCosimulation
(b)
Figure 11 Comparison of the results of the pure FLUENT simulation and FLUENTAMESim cosimulation (a) Displacement response(b) Fluid load acting on valve plug
8 Science and Technology of Nuclear Installations
times104
times104
times104
10
13
16
19
22
25
Flui
d lo
ad (N
)
120
125
130
135
140
145
0001 0002 0003 0004 0005
001000 003 004002 005Time (s)
00130012 00150014 0016200
205
210
215
220
Figure 13 Transient variation of fluid loads on plug surfaces
0010
0015
0020
0025
0030
0035
0040
0045
Plug
disp
lace
men
t (m
)
0502 0600 0401 03Time (s)
(a)
20000
30000
40000
50000
60000
70000
80000
90000
Volu
me fl
ow ra
te (L
min
)
0502 0600 0401 03Time (s)
(b)
ndash150000
ndash100000
ndash50000
0
50000
100000
150000
200000
250000
300000
Flui
d lo
ad (N
)
0502 0600 0401 03Time (s)
(c)
ndash150000
ndash50000
50000
150000
250000
350000
450000
Driv
ing
forc
e (N
)
0502 04 0600 01 03Time (s)
(d)
Figure 12 Cosimulation results for the valversquos dynamic variation versus time (a) Valve plug displacement (b) Volume flow rate at the valveoutlet (c) Fluid load on the valve plug (d) Driving force of the actuator
Science and Technology of Nuclear Installations 9
t = 0001s t = 0007s t = 0012s
t = 0028s t = 0046s t = 0066s
t = 0090s t = 0150s t = 0600s
Pressure (Pa) 70E + 06 74E + 06 78E + 06 82E + 06 86E + 06 90E + 06 94E + 06 98E + 06
Figure 14 Pressure field distributions at different times
t = 0001s t = 0007s t = 0012s
t = 0028s t = 0046s t = 0066s
t = 0090s t = 0150s t = 0600s
8075706560555045403530252015105Velocity (ms)
Figure 15 Velocity magnitude distributions at different times
10 Science and Technology of Nuclear Installations
valve plug was attached to a low-pressure region which wasprone to cavitation resulting in potential damage to thevalve plug
For the pressure field of t 0007 s the fluid pressure inthe valve cavity decreased from the bottom face to the upperface of the valve plug and the maximum pressure in thevicinity of the bottom of the valve plug was approximately98MPa In the subsequent 5ms the area occupied by thehigh-pressure region on the lower half surface of the valveplug gradually expanded at t 0012 s in particular thepressure in the partial region was approximately 10MPaReferring to the fluid load curve obtained by AMESimshown in Figure 13 the fluid load acting on the valve plugcontinuously increased within this period (from t 0007 s tot 0012 s) e main reason was that as the valve plugmoved toward the closing direction during this period theflow area of the orifice region became smaller and thepressure fluctuation in the valve cavity increased which leadto a larger area of the high-pressure region on the lowersurface of the plug On the other hand the fluid load on thevalve plug was obtained by integrating the surface area of thevalve plug with the pressure distribution on the upper andlower surfaces of the valve plug us the increase of thepressure difference between the lower and upper surfaces ofthe valve plug made the fluid load increase A similarphenomenon occurred in the period from t 0090 to0150 s erefore the calculation results of AMESim wereobserved to correspond with those of FLUENT
Figure 15 shows the sequence of the velocity magnitudecontours In the initial opening process of the valve plug fortlt 0005 s the flow area at the orifice was small e flowchannels were in a strong throttling state which caused thefluid pressure to decrease and the velocity to increase in theorifice region As the fluid accelerated through the narrowgap of the orifice the valve seat functioned as a throatresulting in a jet at t 0007 s that hit the valve plug at highvelocities After t 0012 s the valve plug moved toward theclosing direction and an asymmetric jet occurred at bothsides of the valve seat e asymmetric accelerating fluidcaused the hydraulic inductance owing to inertia It acted onthe surface of the valve plug and coupled with the movingvalve plug as well as the uneven pressure gradient in thisregion which were the main reasons for variable and os-cillating fluid loads on the valve plug (see Figure 13)
From Figure 16 the velocity of the jet region was higherthan that of the nearby fluid region when the fluid flowedthrough the orifice In the first 10ms the high-speed andlow-speed streams were mixed in the nearby regionresulting in a strong shear effect which caused the formationof vortices in the low-speed region Owing to the structuralobstruction vortices appeared on the left side and top wall ofthe valve body where the fluid stagnated and its velocitydecreased At t 0012 s vortex production at the lip of thevalve seat resulted in unsteady shedding and a large amountof energy was removed the phenomenon of vortex sheddingchanged the pressure distribution around the valve seat (seeFigure 14) which caused a sudden change in the fluid loadon the valve plug Furthermore the jet spread out further tothe valversquos downstream chamber which cannot avoid the
flow pathrsquos bend resulting in the formation of a recirculationregion as shown at t 0028 s is recirculation regionexpanded to the bottom of the downstream pipeline andoccupied the flow channel space Consequently the main-stream fluid was squeezed and its flow direction wasdisturbed
42 Dynamic Studies Related to Different Valve Plugs Tofurther explore the dynamic performance of the controlvalve plug we changed the shape of the valve plug eprofile curves of two other valve plugs with the flow char-acteristics of quick-opening and equal percentage weredesigned according to the calculation formula of the in-herent flow characteristic [20 21] and the cosimulations forthese two valves were conducted During the simulationprocess the initial opening percentage of the valve plugdesired flow rate at valve outlet boundary conditions andsolution parameters were unchanged e simulation resultswere as follows
Figure 17 shows the variation in fluid loads on the valveplug under different plug shapes By comparison we ob-served that in the first 1ms the fluid load acting on the equalpercentage plug exhibited high-frequency oscillations alongthe horizontal axis which was far greater than that of thefluid load acting on the other two types of valve plugserefore more load compensation was needed for the equalpercentage plug in this time period e oscillation trend ofthe unstable fluid loads acting on the quick-opening plugwas similar to that of the linear plug which was charac-terized by irregular and pulse-like fluctuations and itsfluctuation amplitude was larger than that of the linear plugAs the valve opening increased the amplitude attenuation ofthe fluid load acting on the linear plug was the fastest eoscillating fluid loads experienced by three different types ofvalve plugs gradually decreased and then fluctuated within asmall range When the valve plug attained equilibrium thefluid load acting on the quick-opening plug was the largestwhereas the equal percentage plug was the smallest whichdiffers by approximately 13 times as shown in Table 2
Figure 18 shows the dynamic change in the flow rate atthe valve outlet As the initial displacement of the valve plugincreased the outlet flow rate for the control valve with theflow characteristic of equal percentage fluctuated signifi-cantly within 1mse flow behavior was consistent with thehigh-frequency oscillating fluid loads (Figure 17) the largerthe flow fluctuation the greater the oscillating amplitude ofthe fluid load on the valve plug is process produced animpulsive force on the valve plug which would causestructural failure When the outlet flow rate for the threecontrol valves with different flow characteristics tended tothe desired value all the valve plugs were balanced to achievethe goal of controlling the flow rate behind the valve
Figure 19 shows the flow curves when three controlvalves were in a stable state We observed that the outlet flowrate for every control valve was approximate to the targetvalue but it had a certain deviation from the desired valueand the deviation degree was less than 001 as shown inTable 3 In combination with the actual situation the valve
Science and Technology of Nuclear Installations 11
could not completely maintain the desired value because offactors such as its own structure and external interferenceduring the working process erefore this result suggestedthat after three types of control valves with flow charac-teristics of equal percentage quick-opening and linearattained equilibrium their outlet flow rate value with thedesired value had slight differences
On the other hand although the valve plug was balancedthe flow rate at the valve outlet still exhibited slight fluc-tuations near the desired value To compare the stability timeof different valve plugs we analyzed how fast the outlet flowrate stabilizes for each valve plug considering a deviation of01 (within the engineering allowable range) as the stabilitycriterion In other words when the outlet flow rate becameand remained in the range of 79920ndash80080 Lmin it wasconsidered to have attained stability Figure 19 and Table 3show that the outlet flow of the control valve with the flowcharacteristic of equal percentage was the first to attain therange of this zone and its stability time was the shortest Incontrast the control valve with the flow characteristic ofquick-opening lagged behind the other two valves
In summary when a certain pressure is given at the inletand outlet of the control valve (in this study the inlet andoutlet pressures were 10 and 8MPa respectively) the valveplug moves from a 10 opening to the balance position tocontrol the flow behind the valve e stability time of thecontrol valve with the flow characteristic of equal percentageis fast but this valve plug is subjected to sharply rapidlyoscillating fluid loads in the movement process the quick-opening valve plug takes a long time to attain stability andthe fluid load acting on the plug is large in the balanceposition e fluctuation amplitude of the fluid load appliedto the linear valve plug is relatively low and the damage tothis valve plug is small In practice the selection and design
t = 0001s
t = 0012s
t = 0066s
t = 0150s
t = 0007s
t = 0028s
t = 0090s
t = 0600s
8075706560555045403530252015105Velocity (ms)
Figure 16 Streamlines at different simulation times
times104
ndash5
0
5
10
15
20
25
30
Flui
d lo
ad (N
)
007 008003 006005004002001000Time (s)
times10ndash4
times106
ndash25ndash20ndash15ndash10
ndash505
2 864 100
LinearQuick-openingEqual percentage
Figure 17 Transient variation of fluid loads on different plugsurfaces
Table 2 Fluid load difference at the balance position for differentvalve plugs
e fluid loadon the plug Linear Quick-opening Equal percentage
At the balanceposition (N) 207867 223922 171488
12 Science and Technology of Nuclear Installations
requirements for the control valve plug are different owingto different working environments For example wheninvolving the high-security region on the warship thecontrol valve is required to respond rapidly in an emergencyto achieve rapid regulation erefore the valve plugrsquos
stability time is the focus and the valve plug with faststability time should be selected For control valves that workfrequently the valve plug is constantly in the process ofdynamic adjustment so we should choose the valve plugwith a smaller fluctuation amplitude of the fluid load
5 Conclusion
Based on the FSI a cosimulation for the mechanical-electric-fluid system of the control valve was performed using theFLUENT and AMESim platforms e interaction effectbetween the valve components and fluid flow was com-prehensively considered rough the coupling calculationand data exchange of the two software the opening curve ofthe control valve in the dynamic adjustment process wasobtained e UDF and dynamic mesh technology were alsoused to solve the problem of instantaneous changes in thecalculation region caused by the valve plug movement
Compared with the pure simulations this study per-formed a synchronous analysis of the unsteady flow fieldcharacteristics in the valve cavity and the dynamic responseof the actuator As the valve plug dynamically moved aplurality of low-pressure zones of different sizes appeared inthe valve chamber because of the FSI effect e jet flowformed by the asymmetric high-speed fluid near the valveseat area was accompanied by the vortex shedding phe-nomenon Moreover we observed that the valve plug surfacewas subjected to unstable and oscillating fluid loads whicheasily caused the valve plug to vibrate ese dynamicsimulation results can give theoretical guidance for accu-rately compensating the additional fluid load on the valveplug
e behavior of the control valve with different flowcharacteristics was compared by changing the valve plugshape For inlet and outlet pressures of the control valve of10 and 8MPa respectively the valve plug beginning to movefrom the 10 opening position the results indicated that thecontrol valve with the flow characteristic of equal percentagewas sensitive to the effect of the fluid flowe fluctuation inthe flow rate at this valve outlet and the oscillation of thefluid load acting on this valve plug were high for a smallopening exceeding those of the control valves with the flowcharacteristics of quick-opening and linear And more loadcompensation was required for the equal percentage plug Inaddition the control valve with the flow characteristic ofequal percentage was the first to attain equilibrium with thefastest stability time whereas the control valve with the flowcharacteristic of quick-opening was the slowest When thecontrol valve was stable the deviation between the outletflow rate value and the desired value for every type of controlvalve with three different flow characteristics was negligible
times104
0
1
2
3
4
5
6
7
8
9
10
Volu
me fl
ow ra
te (L
min
)
006 008002 004000Time (s)
times10ndash4
times104
150 105 2030354045505560
LinearQuick-openingEqual percentage
Figure 18 Outlet flow rate of the control valve corresponding todifferent plugs
times104
2
3
4
5
6
7
8
9
Volu
me fl
ow ra
te (L
min
)
01 04 0600 02 0503Time (s)
79920
80080
80000
80003
060504030201
LinearQuick-openingEqual percentage
Figure 19 Outlet flow rate of the control valve corresponding todifferent plugs in the balance position
Table 3 Flow rate difference in stable value and stable time fordifferent valve plugs
e flow rate atvalve outlet Linear Quick-opening Equal
percentageStable value (Lmin) 8000085 8000115 8000183Stability time (s) 0198 0245 0187
Science and Technology of Nuclear Installations 13
Owing to the various types of warship control valves theoperating characteristics of the valves should be completelymastered according to the actual working environmentswhen selecting them is study provides a new insightscheme on the dynamic analysis and performance evaluationin control valves e results are significant to reduce thefailure rate of the warship control valve improve the controlaccuracy and prolong the life of the valve
Data Availability
e data used to support the findings of this study are in-cluded within the article
Conflicts of Interest
e authors declare no conflicts of interest
Acknowledgments
is research was funded by the National Natural ScienceFoundation of China (Grant nos 51775310 and 51875316) theKey Research and Development Project of Shandong Province(Grant no 2019GHY112052) the Natural Science Foundationof Shandong Province (Grant no ZR2019MEE025) the Na-tional Key Research and Development Project of China (Grantno 2016YFD0701104) and the Project for Scientific ResearchInnovation Team of Young Scholar in Colleges and Univer-sities of Shandong Province (Grant no 2020KJB001)
References
[1] V Ahuja A Hosangadi P Cavallo and R Daines ldquoAnalysesof transient events in complex valve and feed systemsrdquo inProceedings Of the 41st AIAAASMESAEASEE Joint Pro-pulsion Conference And Exhibit pp 1ndash13 Tucson AZ USAJuly 2005
[2] P A Cavallo A Hosangadi and V Ahuja ldquoTransient sim-ulations of valve motion in cryogenic systemsrdquo in ProceedingsOf the 35th AIAA Fluid Dynamics Conference And Exhibitpp 1ndash11 Toronto Ontario Canada June 2005
[3] J Shipman A Hosangadi and V Ahuja ldquoUnsteady analysesof valve systems in rocket engine testing environmentsrdquo inProceedings Of the 40th AIAAASMESAEASEE Joint Pro-pulsion Conference And Exhibit pp 1ndash10 Fort LauderdaleFlorida USA July 2004
[4] B K Saha H Chattopadhyay P B Mandal andT Gangopadhyay ldquoDynamic simulation of a pressure regu-lating and shut-off valverdquo Computers amp Fluids vol 101pp 233ndash240 2014
[5] A Beune J G M Kuerten and M P C van Heumen ldquoCFDanalysis with fluid-structure interaction of opening high-pressure safety valvesrdquo Computers amp Fluids vol 64 no 3pp 108ndash116 2012
[6] R Morita F Inada M Mori K Tezuka and Y TsujimotoldquoCFD simulations and experiments of flow fluctuationsaround a steam control valverdquo Journal of Fluids Engineeringvol 129 no 1 pp 48ndash54 2007
[7] A Misra K Behdinan and W L Cleghorn ldquoSelf-excitedvibration of a control valve due to fluid-structure interactionrdquoJournal of Fluids and Structures vol 16 no 5 pp 649ndash6652002
[8] K Yonezawa R Ogawa K Ogi et al ldquoFlow-induced vibrationof a steam control valverdquo Journal of Fluids and Structuresvol 35 no 776 pp 76ndash88 2012
[9] C Bolin and A Engeda ldquoAnalysis of flow-induced instabilityin a redesigned steam control valverdquo Applied ermal En-gineering vol 83 pp 40ndash47 2015
[10] G Palau-Salvador P Gonzalez-Altozano and J Arviza-Valverde ldquoree-dimensional modeling and geometricalinfluence on the hydraulic performance of a control valverdquoJournal of Fluids Engineering vol 130 no 1 pp 151ndash1632008
[11] Y Xie Y Wang Y Liu F Cao and Y Pan ldquoUnsteadyanalyses of a control valve due to fluid-structure couplingrdquoMathematical Problems in Engineering vol 2013 Article ID174731 7 pages 2013
[12] J Tecza G Chochua and R Moll ldquoAnalysis of fluid-structureinteraction in a steam turbine throttle valverdquo in ProceedingsOf the ASME Turbo Expo Power for Land Sea and Airpp 2329ndash2338 Glasgow UK June 2010
[13] X Sun X Li Z Zheng and D Huang ldquoFluid-structure in-teraction analysis of a high-pressure regulating valve of a 600-MW ultra-supercritical steam turbinerdquo Proceedings of theInstitution of Mechanical Engineers Part A Journal of Powerand Energy vol 229 no 3 pp 270ndash279 2015
[14] H Wang M-j Peng Y-k Liu S-w Liu R-y Xu andH Saeed ldquoRemaining useful life prediction techniques ofelectric valves for nuclear power plants with convolutionkernel and LSTMrdquo Science and Technology of Nuclear In-stallations vol 2020 pp 1ndash13 2020
[15] R Fadaeinedjad M Moallem and G Moschopoulos ldquoSim-ulation of a wind turbine with doubly fed induction generatorby FAST and Simulinkrdquo IEEE Transactions on Energy Con-version vol 23 no 2 pp 690ndash700 2008
[16] R Zhang K P Lam S-c Yao and Y Zhang ldquoCoupledEnergyPlus and Computational Fluid Dynamics Simulationfor Natural Ventilationrdquo Building and Environment vol 68pp 100ndash113 2013
[17] T Kerh J J Lee and L C Wellford ldquoTransient fluid-structure interaction in a control valverdquo Journal of FluidsEngineering vol 119 no 2 pp 354ndash359 1997
[18] R Messahel C Regan M H Souli and C Ruiu ldquoNumericalinvestigation of homogeneous equilibrium model and fluid-structure interaction for multiphase water flows in pipesrdquoInternational Journal of Multiphase Flow vol 98 pp 56ndash662018
[19] LMS LMS ImagineLab AMESim Generic Co-simulation Rev13 Userrsquos Guide Roanne France 2013
[20] Emerson Electric Co Control Valve Handbook Lowa USA2005
[21] B Fitzgerald Control Valves for the Chemical Process In-dustries McGraw-Hill New York NY USA 1995
[22] V Yakhot and S A Orszag ldquoRenormalization group analysisof turbulence I Basic eoryrdquo Journal of Scientific Com-puting vol 1 no 1 pp 3ndash51 1986
[23] L Wang J Cui and K Yao ldquoNumerical simulation and analysisof gas flow field in serrated valve columnrdquo Chinese Journal ofChemical Engineering vol 16 no 4 pp 541ndash546 2008
[24] J-Y Qian Z-X Gao J-K Wang and Z-J Jin ldquoExperimentaland numerical analysis of spring stiffness on flow and valvecore movement in pilot control globe valverdquo InternationalJournal of Hydrogen Energy vol 42 no 27 pp 17192ndash172012017
14 Science and Technology of Nuclear Installations

times104
times104
times104
10
13
16
19
22
25
Flui
d lo
ad (N
)
120
125
130
135
140
145
0001 0002 0003 0004 0005
001000 003 004002 005Time (s)
00130012 00150014 0016200
205
210
215
220
Figure 13 Transient variation of fluid loads on plug surfaces
0010
0015
0020
0025
0030
0035
0040
0045
Plug
disp
lace
men
t (m
)
0502 0600 0401 03Time (s)
(a)
20000
30000
40000
50000
60000
70000
80000
90000
Volu
me fl
ow ra
te (L
min
)
0502 0600 0401 03Time (s)
(b)
ndash150000
ndash100000
ndash50000
0
50000
100000
150000
200000
250000
300000
Flui
d lo
ad (N
)
0502 0600 0401 03Time (s)
(c)
ndash150000
ndash50000
50000
150000
250000
350000
450000
Driv
ing
forc
e (N
)
0502 04 0600 01 03Time (s)
(d)
Figure 12 Cosimulation results for the valversquos dynamic variation versus time (a) Valve plug displacement (b) Volume flow rate at the valveoutlet (c) Fluid load on the valve plug (d) Driving force of the actuator
Science and Technology of Nuclear Installations 9
t = 0001s t = 0007s t = 0012s
t = 0028s t = 0046s t = 0066s
t = 0090s t = 0150s t = 0600s
Pressure (Pa) 70E + 06 74E + 06 78E + 06 82E + 06 86E + 06 90E + 06 94E + 06 98E + 06
Figure 14 Pressure field distributions at different times
t = 0001s t = 0007s t = 0012s
t = 0028s t = 0046s t = 0066s
t = 0090s t = 0150s t = 0600s
8075706560555045403530252015105Velocity (ms)
Figure 15 Velocity magnitude distributions at different times
10 Science and Technology of Nuclear Installations
valve plug was attached to a low-pressure region which wasprone to cavitation resulting in potential damage to thevalve plug
For the pressure field of t 0007 s the fluid pressure inthe valve cavity decreased from the bottom face to the upperface of the valve plug and the maximum pressure in thevicinity of the bottom of the valve plug was approximately98MPa In the subsequent 5ms the area occupied by thehigh-pressure region on the lower half surface of the valveplug gradually expanded at t 0012 s in particular thepressure in the partial region was approximately 10MPaReferring to the fluid load curve obtained by AMESimshown in Figure 13 the fluid load acting on the valve plugcontinuously increased within this period (from t 0007 s tot 0012 s) e main reason was that as the valve plugmoved toward the closing direction during this period theflow area of the orifice region became smaller and thepressure fluctuation in the valve cavity increased which leadto a larger area of the high-pressure region on the lowersurface of the plug On the other hand the fluid load on thevalve plug was obtained by integrating the surface area of thevalve plug with the pressure distribution on the upper andlower surfaces of the valve plug us the increase of thepressure difference between the lower and upper surfaces ofthe valve plug made the fluid load increase A similarphenomenon occurred in the period from t 0090 to0150 s erefore the calculation results of AMESim wereobserved to correspond with those of FLUENT
Figure 15 shows the sequence of the velocity magnitudecontours In the initial opening process of the valve plug fortlt 0005 s the flow area at the orifice was small e flowchannels were in a strong throttling state which caused thefluid pressure to decrease and the velocity to increase in theorifice region As the fluid accelerated through the narrowgap of the orifice the valve seat functioned as a throatresulting in a jet at t 0007 s that hit the valve plug at highvelocities After t 0012 s the valve plug moved toward theclosing direction and an asymmetric jet occurred at bothsides of the valve seat e asymmetric accelerating fluidcaused the hydraulic inductance owing to inertia It acted onthe surface of the valve plug and coupled with the movingvalve plug as well as the uneven pressure gradient in thisregion which were the main reasons for variable and os-cillating fluid loads on the valve plug (see Figure 13)
From Figure 16 the velocity of the jet region was higherthan that of the nearby fluid region when the fluid flowedthrough the orifice In the first 10ms the high-speed andlow-speed streams were mixed in the nearby regionresulting in a strong shear effect which caused the formationof vortices in the low-speed region Owing to the structuralobstruction vortices appeared on the left side and top wall ofthe valve body where the fluid stagnated and its velocitydecreased At t 0012 s vortex production at the lip of thevalve seat resulted in unsteady shedding and a large amountof energy was removed the phenomenon of vortex sheddingchanged the pressure distribution around the valve seat (seeFigure 14) which caused a sudden change in the fluid loadon the valve plug Furthermore the jet spread out further tothe valversquos downstream chamber which cannot avoid the
flow pathrsquos bend resulting in the formation of a recirculationregion as shown at t 0028 s is recirculation regionexpanded to the bottom of the downstream pipeline andoccupied the flow channel space Consequently the main-stream fluid was squeezed and its flow direction wasdisturbed
42 Dynamic Studies Related to Different Valve Plugs Tofurther explore the dynamic performance of the controlvalve plug we changed the shape of the valve plug eprofile curves of two other valve plugs with the flow char-acteristics of quick-opening and equal percentage weredesigned according to the calculation formula of the in-herent flow characteristic [20 21] and the cosimulations forthese two valves were conducted During the simulationprocess the initial opening percentage of the valve plugdesired flow rate at valve outlet boundary conditions andsolution parameters were unchanged e simulation resultswere as follows
Figure 17 shows the variation in fluid loads on the valveplug under different plug shapes By comparison we ob-served that in the first 1ms the fluid load acting on the equalpercentage plug exhibited high-frequency oscillations alongthe horizontal axis which was far greater than that of thefluid load acting on the other two types of valve plugserefore more load compensation was needed for the equalpercentage plug in this time period e oscillation trend ofthe unstable fluid loads acting on the quick-opening plugwas similar to that of the linear plug which was charac-terized by irregular and pulse-like fluctuations and itsfluctuation amplitude was larger than that of the linear plugAs the valve opening increased the amplitude attenuation ofthe fluid load acting on the linear plug was the fastest eoscillating fluid loads experienced by three different types ofvalve plugs gradually decreased and then fluctuated within asmall range When the valve plug attained equilibrium thefluid load acting on the quick-opening plug was the largestwhereas the equal percentage plug was the smallest whichdiffers by approximately 13 times as shown in Table 2
Figure 18 shows the dynamic change in the flow rate atthe valve outlet As the initial displacement of the valve plugincreased the outlet flow rate for the control valve with theflow characteristic of equal percentage fluctuated signifi-cantly within 1mse flow behavior was consistent with thehigh-frequency oscillating fluid loads (Figure 17) the largerthe flow fluctuation the greater the oscillating amplitude ofthe fluid load on the valve plug is process produced animpulsive force on the valve plug which would causestructural failure When the outlet flow rate for the threecontrol valves with different flow characteristics tended tothe desired value all the valve plugs were balanced to achievethe goal of controlling the flow rate behind the valve
Figure 19 shows the flow curves when three controlvalves were in a stable state We observed that the outlet flowrate for every control valve was approximate to the targetvalue but it had a certain deviation from the desired valueand the deviation degree was less than 001 as shown inTable 3 In combination with the actual situation the valve
Science and Technology of Nuclear Installations 11
could not completely maintain the desired value because offactors such as its own structure and external interferenceduring the working process erefore this result suggestedthat after three types of control valves with flow charac-teristics of equal percentage quick-opening and linearattained equilibrium their outlet flow rate value with thedesired value had slight differences
On the other hand although the valve plug was balancedthe flow rate at the valve outlet still exhibited slight fluc-tuations near the desired value To compare the stability timeof different valve plugs we analyzed how fast the outlet flowrate stabilizes for each valve plug considering a deviation of01 (within the engineering allowable range) as the stabilitycriterion In other words when the outlet flow rate becameand remained in the range of 79920ndash80080 Lmin it wasconsidered to have attained stability Figure 19 and Table 3show that the outlet flow of the control valve with the flowcharacteristic of equal percentage was the first to attain therange of this zone and its stability time was the shortest Incontrast the control valve with the flow characteristic ofquick-opening lagged behind the other two valves
In summary when a certain pressure is given at the inletand outlet of the control valve (in this study the inlet andoutlet pressures were 10 and 8MPa respectively) the valveplug moves from a 10 opening to the balance position tocontrol the flow behind the valve e stability time of thecontrol valve with the flow characteristic of equal percentageis fast but this valve plug is subjected to sharply rapidlyoscillating fluid loads in the movement process the quick-opening valve plug takes a long time to attain stability andthe fluid load acting on the plug is large in the balanceposition e fluctuation amplitude of the fluid load appliedto the linear valve plug is relatively low and the damage tothis valve plug is small In practice the selection and design
t = 0001s
t = 0012s
t = 0066s
t = 0150s
t = 0007s
t = 0028s
t = 0090s
t = 0600s
8075706560555045403530252015105Velocity (ms)
Figure 16 Streamlines at different simulation times
times104
ndash5
0
5
10
15
20
25
30
Flui
d lo
ad (N
)
007 008003 006005004002001000Time (s)
times10ndash4
times106
ndash25ndash20ndash15ndash10
ndash505
2 864 100
LinearQuick-openingEqual percentage
Figure 17 Transient variation of fluid loads on different plugsurfaces
Table 2 Fluid load difference at the balance position for differentvalve plugs
e fluid loadon the plug Linear Quick-opening Equal percentage
At the balanceposition (N) 207867 223922 171488
12 Science and Technology of Nuclear Installations
requirements for the control valve plug are different owingto different working environments For example wheninvolving the high-security region on the warship thecontrol valve is required to respond rapidly in an emergencyto achieve rapid regulation erefore the valve plugrsquos
stability time is the focus and the valve plug with faststability time should be selected For control valves that workfrequently the valve plug is constantly in the process ofdynamic adjustment so we should choose the valve plugwith a smaller fluctuation amplitude of the fluid load
5 Conclusion
Based on the FSI a cosimulation for the mechanical-electric-fluid system of the control valve was performed using theFLUENT and AMESim platforms e interaction effectbetween the valve components and fluid flow was com-prehensively considered rough the coupling calculationand data exchange of the two software the opening curve ofthe control valve in the dynamic adjustment process wasobtained e UDF and dynamic mesh technology were alsoused to solve the problem of instantaneous changes in thecalculation region caused by the valve plug movement
Compared with the pure simulations this study per-formed a synchronous analysis of the unsteady flow fieldcharacteristics in the valve cavity and the dynamic responseof the actuator As the valve plug dynamically moved aplurality of low-pressure zones of different sizes appeared inthe valve chamber because of the FSI effect e jet flowformed by the asymmetric high-speed fluid near the valveseat area was accompanied by the vortex shedding phe-nomenon Moreover we observed that the valve plug surfacewas subjected to unstable and oscillating fluid loads whicheasily caused the valve plug to vibrate ese dynamicsimulation results can give theoretical guidance for accu-rately compensating the additional fluid load on the valveplug
e behavior of the control valve with different flowcharacteristics was compared by changing the valve plugshape For inlet and outlet pressures of the control valve of10 and 8MPa respectively the valve plug beginning to movefrom the 10 opening position the results indicated that thecontrol valve with the flow characteristic of equal percentagewas sensitive to the effect of the fluid flowe fluctuation inthe flow rate at this valve outlet and the oscillation of thefluid load acting on this valve plug were high for a smallopening exceeding those of the control valves with the flowcharacteristics of quick-opening and linear And more loadcompensation was required for the equal percentage plug Inaddition the control valve with the flow characteristic ofequal percentage was the first to attain equilibrium with thefastest stability time whereas the control valve with the flowcharacteristic of quick-opening was the slowest When thecontrol valve was stable the deviation between the outletflow rate value and the desired value for every type of controlvalve with three different flow characteristics was negligible
times104
0
1
2
3
4
5
6
7
8
9
10
Volu
me fl
ow ra
te (L
min
)
006 008002 004000Time (s)
times10ndash4
times104
150 105 2030354045505560
LinearQuick-openingEqual percentage
Figure 18 Outlet flow rate of the control valve corresponding todifferent plugs
times104
2
3
4
5
6
7
8
9
Volu
me fl
ow ra
te (L
min
)
01 04 0600 02 0503Time (s)
79920
80080
80000
80003
060504030201
LinearQuick-openingEqual percentage
Figure 19 Outlet flow rate of the control valve corresponding todifferent plugs in the balance position
Table 3 Flow rate difference in stable value and stable time fordifferent valve plugs
e flow rate atvalve outlet Linear Quick-opening Equal
percentageStable value (Lmin) 8000085 8000115 8000183Stability time (s) 0198 0245 0187
Science and Technology of Nuclear Installations 13
Owing to the various types of warship control valves theoperating characteristics of the valves should be completelymastered according to the actual working environmentswhen selecting them is study provides a new insightscheme on the dynamic analysis and performance evaluationin control valves e results are significant to reduce thefailure rate of the warship control valve improve the controlaccuracy and prolong the life of the valve
Data Availability
e data used to support the findings of this study are in-cluded within the article
Conflicts of Interest
e authors declare no conflicts of interest
Acknowledgments
is research was funded by the National Natural ScienceFoundation of China (Grant nos 51775310 and 51875316) theKey Research and Development Project of Shandong Province(Grant no 2019GHY112052) the Natural Science Foundationof Shandong Province (Grant no ZR2019MEE025) the Na-tional Key Research and Development Project of China (Grantno 2016YFD0701104) and the Project for Scientific ResearchInnovation Team of Young Scholar in Colleges and Univer-sities of Shandong Province (Grant no 2020KJB001)
References
[1] V Ahuja A Hosangadi P Cavallo and R Daines ldquoAnalysesof transient events in complex valve and feed systemsrdquo inProceedings Of the 41st AIAAASMESAEASEE Joint Pro-pulsion Conference And Exhibit pp 1ndash13 Tucson AZ USAJuly 2005
[2] P A Cavallo A Hosangadi and V Ahuja ldquoTransient sim-ulations of valve motion in cryogenic systemsrdquo in ProceedingsOf the 35th AIAA Fluid Dynamics Conference And Exhibitpp 1ndash11 Toronto Ontario Canada June 2005
[3] J Shipman A Hosangadi and V Ahuja ldquoUnsteady analysesof valve systems in rocket engine testing environmentsrdquo inProceedings Of the 40th AIAAASMESAEASEE Joint Pro-pulsion Conference And Exhibit pp 1ndash10 Fort LauderdaleFlorida USA July 2004
[4] B K Saha H Chattopadhyay P B Mandal andT Gangopadhyay ldquoDynamic simulation of a pressure regu-lating and shut-off valverdquo Computers amp Fluids vol 101pp 233ndash240 2014
[5] A Beune J G M Kuerten and M P C van Heumen ldquoCFDanalysis with fluid-structure interaction of opening high-pressure safety valvesrdquo Computers amp Fluids vol 64 no 3pp 108ndash116 2012
[6] R Morita F Inada M Mori K Tezuka and Y TsujimotoldquoCFD simulations and experiments of flow fluctuationsaround a steam control valverdquo Journal of Fluids Engineeringvol 129 no 1 pp 48ndash54 2007
[7] A Misra K Behdinan and W L Cleghorn ldquoSelf-excitedvibration of a control valve due to fluid-structure interactionrdquoJournal of Fluids and Structures vol 16 no 5 pp 649ndash6652002
[8] K Yonezawa R Ogawa K Ogi et al ldquoFlow-induced vibrationof a steam control valverdquo Journal of Fluids and Structuresvol 35 no 776 pp 76ndash88 2012
[9] C Bolin and A Engeda ldquoAnalysis of flow-induced instabilityin a redesigned steam control valverdquo Applied ermal En-gineering vol 83 pp 40ndash47 2015
[10] G Palau-Salvador P Gonzalez-Altozano and J Arviza-Valverde ldquoree-dimensional modeling and geometricalinfluence on the hydraulic performance of a control valverdquoJournal of Fluids Engineering vol 130 no 1 pp 151ndash1632008
[11] Y Xie Y Wang Y Liu F Cao and Y Pan ldquoUnsteadyanalyses of a control valve due to fluid-structure couplingrdquoMathematical Problems in Engineering vol 2013 Article ID174731 7 pages 2013
[12] J Tecza G Chochua and R Moll ldquoAnalysis of fluid-structureinteraction in a steam turbine throttle valverdquo in ProceedingsOf the ASME Turbo Expo Power for Land Sea and Airpp 2329ndash2338 Glasgow UK June 2010
[13] X Sun X Li Z Zheng and D Huang ldquoFluid-structure in-teraction analysis of a high-pressure regulating valve of a 600-MW ultra-supercritical steam turbinerdquo Proceedings of theInstitution of Mechanical Engineers Part A Journal of Powerand Energy vol 229 no 3 pp 270ndash279 2015
[14] H Wang M-j Peng Y-k Liu S-w Liu R-y Xu andH Saeed ldquoRemaining useful life prediction techniques ofelectric valves for nuclear power plants with convolutionkernel and LSTMrdquo Science and Technology of Nuclear In-stallations vol 2020 pp 1ndash13 2020
[15] R Fadaeinedjad M Moallem and G Moschopoulos ldquoSim-ulation of a wind turbine with doubly fed induction generatorby FAST and Simulinkrdquo IEEE Transactions on Energy Con-version vol 23 no 2 pp 690ndash700 2008
[16] R Zhang K P Lam S-c Yao and Y Zhang ldquoCoupledEnergyPlus and Computational Fluid Dynamics Simulationfor Natural Ventilationrdquo Building and Environment vol 68pp 100ndash113 2013
[17] T Kerh J J Lee and L C Wellford ldquoTransient fluid-structure interaction in a control valverdquo Journal of FluidsEngineering vol 119 no 2 pp 354ndash359 1997
[18] R Messahel C Regan M H Souli and C Ruiu ldquoNumericalinvestigation of homogeneous equilibrium model and fluid-structure interaction for multiphase water flows in pipesrdquoInternational Journal of Multiphase Flow vol 98 pp 56ndash662018
[19] LMS LMS ImagineLab AMESim Generic Co-simulation Rev13 Userrsquos Guide Roanne France 2013
[20] Emerson Electric Co Control Valve Handbook Lowa USA2005
[21] B Fitzgerald Control Valves for the Chemical Process In-dustries McGraw-Hill New York NY USA 1995
[22] V Yakhot and S A Orszag ldquoRenormalization group analysisof turbulence I Basic eoryrdquo Journal of Scientific Com-puting vol 1 no 1 pp 3ndash51 1986
[23] L Wang J Cui and K Yao ldquoNumerical simulation and analysisof gas flow field in serrated valve columnrdquo Chinese Journal ofChemical Engineering vol 16 no 4 pp 541ndash546 2008
[24] J-Y Qian Z-X Gao J-K Wang and Z-J Jin ldquoExperimentaland numerical analysis of spring stiffness on flow and valvecore movement in pilot control globe valverdquo InternationalJournal of Hydrogen Energy vol 42 no 27 pp 17192ndash172012017
14 Science and Technology of Nuclear Installations

t = 0001s t = 0007s t = 0012s
t = 0028s t = 0046s t = 0066s
t = 0090s t = 0150s t = 0600s
Pressure (Pa) 70E + 06 74E + 06 78E + 06 82E + 06 86E + 06 90E + 06 94E + 06 98E + 06
Figure 14 Pressure field distributions at different times
t = 0001s t = 0007s t = 0012s
t = 0028s t = 0046s t = 0066s
t = 0090s t = 0150s t = 0600s
8075706560555045403530252015105Velocity (ms)
Figure 15 Velocity magnitude distributions at different times
10 Science and Technology of Nuclear Installations
valve plug was attached to a low-pressure region which wasprone to cavitation resulting in potential damage to thevalve plug
For the pressure field of t 0007 s the fluid pressure inthe valve cavity decreased from the bottom face to the upperface of the valve plug and the maximum pressure in thevicinity of the bottom of the valve plug was approximately98MPa In the subsequent 5ms the area occupied by thehigh-pressure region on the lower half surface of the valveplug gradually expanded at t 0012 s in particular thepressure in the partial region was approximately 10MPaReferring to the fluid load curve obtained by AMESimshown in Figure 13 the fluid load acting on the valve plugcontinuously increased within this period (from t 0007 s tot 0012 s) e main reason was that as the valve plugmoved toward the closing direction during this period theflow area of the orifice region became smaller and thepressure fluctuation in the valve cavity increased which leadto a larger area of the high-pressure region on the lowersurface of the plug On the other hand the fluid load on thevalve plug was obtained by integrating the surface area of thevalve plug with the pressure distribution on the upper andlower surfaces of the valve plug us the increase of thepressure difference between the lower and upper surfaces ofthe valve plug made the fluid load increase A similarphenomenon occurred in the period from t 0090 to0150 s erefore the calculation results of AMESim wereobserved to correspond with those of FLUENT
Figure 15 shows the sequence of the velocity magnitudecontours In the initial opening process of the valve plug fortlt 0005 s the flow area at the orifice was small e flowchannels were in a strong throttling state which caused thefluid pressure to decrease and the velocity to increase in theorifice region As the fluid accelerated through the narrowgap of the orifice the valve seat functioned as a throatresulting in a jet at t 0007 s that hit the valve plug at highvelocities After t 0012 s the valve plug moved toward theclosing direction and an asymmetric jet occurred at bothsides of the valve seat e asymmetric accelerating fluidcaused the hydraulic inductance owing to inertia It acted onthe surface of the valve plug and coupled with the movingvalve plug as well as the uneven pressure gradient in thisregion which were the main reasons for variable and os-cillating fluid loads on the valve plug (see Figure 13)
From Figure 16 the velocity of the jet region was higherthan that of the nearby fluid region when the fluid flowedthrough the orifice In the first 10ms the high-speed andlow-speed streams were mixed in the nearby regionresulting in a strong shear effect which caused the formationof vortices in the low-speed region Owing to the structuralobstruction vortices appeared on the left side and top wall ofthe valve body where the fluid stagnated and its velocitydecreased At t 0012 s vortex production at the lip of thevalve seat resulted in unsteady shedding and a large amountof energy was removed the phenomenon of vortex sheddingchanged the pressure distribution around the valve seat (seeFigure 14) which caused a sudden change in the fluid loadon the valve plug Furthermore the jet spread out further tothe valversquos downstream chamber which cannot avoid the
flow pathrsquos bend resulting in the formation of a recirculationregion as shown at t 0028 s is recirculation regionexpanded to the bottom of the downstream pipeline andoccupied the flow channel space Consequently the main-stream fluid was squeezed and its flow direction wasdisturbed
42 Dynamic Studies Related to Different Valve Plugs Tofurther explore the dynamic performance of the controlvalve plug we changed the shape of the valve plug eprofile curves of two other valve plugs with the flow char-acteristics of quick-opening and equal percentage weredesigned according to the calculation formula of the in-herent flow characteristic [20 21] and the cosimulations forthese two valves were conducted During the simulationprocess the initial opening percentage of the valve plugdesired flow rate at valve outlet boundary conditions andsolution parameters were unchanged e simulation resultswere as follows
Figure 17 shows the variation in fluid loads on the valveplug under different plug shapes By comparison we ob-served that in the first 1ms the fluid load acting on the equalpercentage plug exhibited high-frequency oscillations alongthe horizontal axis which was far greater than that of thefluid load acting on the other two types of valve plugserefore more load compensation was needed for the equalpercentage plug in this time period e oscillation trend ofthe unstable fluid loads acting on the quick-opening plugwas similar to that of the linear plug which was charac-terized by irregular and pulse-like fluctuations and itsfluctuation amplitude was larger than that of the linear plugAs the valve opening increased the amplitude attenuation ofthe fluid load acting on the linear plug was the fastest eoscillating fluid loads experienced by three different types ofvalve plugs gradually decreased and then fluctuated within asmall range When the valve plug attained equilibrium thefluid load acting on the quick-opening plug was the largestwhereas the equal percentage plug was the smallest whichdiffers by approximately 13 times as shown in Table 2
Figure 18 shows the dynamic change in the flow rate atthe valve outlet As the initial displacement of the valve plugincreased the outlet flow rate for the control valve with theflow characteristic of equal percentage fluctuated signifi-cantly within 1mse flow behavior was consistent with thehigh-frequency oscillating fluid loads (Figure 17) the largerthe flow fluctuation the greater the oscillating amplitude ofthe fluid load on the valve plug is process produced animpulsive force on the valve plug which would causestructural failure When the outlet flow rate for the threecontrol valves with different flow characteristics tended tothe desired value all the valve plugs were balanced to achievethe goal of controlling the flow rate behind the valve
Figure 19 shows the flow curves when three controlvalves were in a stable state We observed that the outlet flowrate for every control valve was approximate to the targetvalue but it had a certain deviation from the desired valueand the deviation degree was less than 001 as shown inTable 3 In combination with the actual situation the valve
Science and Technology of Nuclear Installations 11
could not completely maintain the desired value because offactors such as its own structure and external interferenceduring the working process erefore this result suggestedthat after three types of control valves with flow charac-teristics of equal percentage quick-opening and linearattained equilibrium their outlet flow rate value with thedesired value had slight differences
On the other hand although the valve plug was balancedthe flow rate at the valve outlet still exhibited slight fluc-tuations near the desired value To compare the stability timeof different valve plugs we analyzed how fast the outlet flowrate stabilizes for each valve plug considering a deviation of01 (within the engineering allowable range) as the stabilitycriterion In other words when the outlet flow rate becameand remained in the range of 79920ndash80080 Lmin it wasconsidered to have attained stability Figure 19 and Table 3show that the outlet flow of the control valve with the flowcharacteristic of equal percentage was the first to attain therange of this zone and its stability time was the shortest Incontrast the control valve with the flow characteristic ofquick-opening lagged behind the other two valves
In summary when a certain pressure is given at the inletand outlet of the control valve (in this study the inlet andoutlet pressures were 10 and 8MPa respectively) the valveplug moves from a 10 opening to the balance position tocontrol the flow behind the valve e stability time of thecontrol valve with the flow characteristic of equal percentageis fast but this valve plug is subjected to sharply rapidlyoscillating fluid loads in the movement process the quick-opening valve plug takes a long time to attain stability andthe fluid load acting on the plug is large in the balanceposition e fluctuation amplitude of the fluid load appliedto the linear valve plug is relatively low and the damage tothis valve plug is small In practice the selection and design
t = 0001s
t = 0012s
t = 0066s
t = 0150s
t = 0007s
t = 0028s
t = 0090s
t = 0600s
8075706560555045403530252015105Velocity (ms)
Figure 16 Streamlines at different simulation times
times104
ndash5
0
5
10
15
20
25
30
Flui
d lo
ad (N
)
007 008003 006005004002001000Time (s)
times10ndash4
times106
ndash25ndash20ndash15ndash10
ndash505
2 864 100
LinearQuick-openingEqual percentage
Figure 17 Transient variation of fluid loads on different plugsurfaces
Table 2 Fluid load difference at the balance position for differentvalve plugs
e fluid loadon the plug Linear Quick-opening Equal percentage
At the balanceposition (N) 207867 223922 171488
12 Science and Technology of Nuclear Installations
requirements for the control valve plug are different owingto different working environments For example wheninvolving the high-security region on the warship thecontrol valve is required to respond rapidly in an emergencyto achieve rapid regulation erefore the valve plugrsquos
stability time is the focus and the valve plug with faststability time should be selected For control valves that workfrequently the valve plug is constantly in the process ofdynamic adjustment so we should choose the valve plugwith a smaller fluctuation amplitude of the fluid load
5 Conclusion
Based on the FSI a cosimulation for the mechanical-electric-fluid system of the control valve was performed using theFLUENT and AMESim platforms e interaction effectbetween the valve components and fluid flow was com-prehensively considered rough the coupling calculationand data exchange of the two software the opening curve ofthe control valve in the dynamic adjustment process wasobtained e UDF and dynamic mesh technology were alsoused to solve the problem of instantaneous changes in thecalculation region caused by the valve plug movement
Compared with the pure simulations this study per-formed a synchronous analysis of the unsteady flow fieldcharacteristics in the valve cavity and the dynamic responseof the actuator As the valve plug dynamically moved aplurality of low-pressure zones of different sizes appeared inthe valve chamber because of the FSI effect e jet flowformed by the asymmetric high-speed fluid near the valveseat area was accompanied by the vortex shedding phe-nomenon Moreover we observed that the valve plug surfacewas subjected to unstable and oscillating fluid loads whicheasily caused the valve plug to vibrate ese dynamicsimulation results can give theoretical guidance for accu-rately compensating the additional fluid load on the valveplug
e behavior of the control valve with different flowcharacteristics was compared by changing the valve plugshape For inlet and outlet pressures of the control valve of10 and 8MPa respectively the valve plug beginning to movefrom the 10 opening position the results indicated that thecontrol valve with the flow characteristic of equal percentagewas sensitive to the effect of the fluid flowe fluctuation inthe flow rate at this valve outlet and the oscillation of thefluid load acting on this valve plug were high for a smallopening exceeding those of the control valves with the flowcharacteristics of quick-opening and linear And more loadcompensation was required for the equal percentage plug Inaddition the control valve with the flow characteristic ofequal percentage was the first to attain equilibrium with thefastest stability time whereas the control valve with the flowcharacteristic of quick-opening was the slowest When thecontrol valve was stable the deviation between the outletflow rate value and the desired value for every type of controlvalve with three different flow characteristics was negligible
times104
0
1
2
3
4
5
6
7
8
9
10
Volu
me fl
ow ra
te (L
min
)
006 008002 004000Time (s)
times10ndash4
times104
150 105 2030354045505560
LinearQuick-openingEqual percentage
Figure 18 Outlet flow rate of the control valve corresponding todifferent plugs
times104
2
3
4
5
6
7
8
9
Volu
me fl
ow ra
te (L
min
)
01 04 0600 02 0503Time (s)
79920
80080
80000
80003
060504030201
LinearQuick-openingEqual percentage
Figure 19 Outlet flow rate of the control valve corresponding todifferent plugs in the balance position
Table 3 Flow rate difference in stable value and stable time fordifferent valve plugs
e flow rate atvalve outlet Linear Quick-opening Equal
percentageStable value (Lmin) 8000085 8000115 8000183Stability time (s) 0198 0245 0187
Science and Technology of Nuclear Installations 13
Owing to the various types of warship control valves theoperating characteristics of the valves should be completelymastered according to the actual working environmentswhen selecting them is study provides a new insightscheme on the dynamic analysis and performance evaluationin control valves e results are significant to reduce thefailure rate of the warship control valve improve the controlaccuracy and prolong the life of the valve
Data Availability
e data used to support the findings of this study are in-cluded within the article
Conflicts of Interest
e authors declare no conflicts of interest
Acknowledgments
is research was funded by the National Natural ScienceFoundation of China (Grant nos 51775310 and 51875316) theKey Research and Development Project of Shandong Province(Grant no 2019GHY112052) the Natural Science Foundationof Shandong Province (Grant no ZR2019MEE025) the Na-tional Key Research and Development Project of China (Grantno 2016YFD0701104) and the Project for Scientific ResearchInnovation Team of Young Scholar in Colleges and Univer-sities of Shandong Province (Grant no 2020KJB001)
References
[1] V Ahuja A Hosangadi P Cavallo and R Daines ldquoAnalysesof transient events in complex valve and feed systemsrdquo inProceedings Of the 41st AIAAASMESAEASEE Joint Pro-pulsion Conference And Exhibit pp 1ndash13 Tucson AZ USAJuly 2005
[2] P A Cavallo A Hosangadi and V Ahuja ldquoTransient sim-ulations of valve motion in cryogenic systemsrdquo in ProceedingsOf the 35th AIAA Fluid Dynamics Conference And Exhibitpp 1ndash11 Toronto Ontario Canada June 2005
[3] J Shipman A Hosangadi and V Ahuja ldquoUnsteady analysesof valve systems in rocket engine testing environmentsrdquo inProceedings Of the 40th AIAAASMESAEASEE Joint Pro-pulsion Conference And Exhibit pp 1ndash10 Fort LauderdaleFlorida USA July 2004
[4] B K Saha H Chattopadhyay P B Mandal andT Gangopadhyay ldquoDynamic simulation of a pressure regu-lating and shut-off valverdquo Computers amp Fluids vol 101pp 233ndash240 2014
[5] A Beune J G M Kuerten and M P C van Heumen ldquoCFDanalysis with fluid-structure interaction of opening high-pressure safety valvesrdquo Computers amp Fluids vol 64 no 3pp 108ndash116 2012
[6] R Morita F Inada M Mori K Tezuka and Y TsujimotoldquoCFD simulations and experiments of flow fluctuationsaround a steam control valverdquo Journal of Fluids Engineeringvol 129 no 1 pp 48ndash54 2007
[7] A Misra K Behdinan and W L Cleghorn ldquoSelf-excitedvibration of a control valve due to fluid-structure interactionrdquoJournal of Fluids and Structures vol 16 no 5 pp 649ndash6652002
[8] K Yonezawa R Ogawa K Ogi et al ldquoFlow-induced vibrationof a steam control valverdquo Journal of Fluids and Structuresvol 35 no 776 pp 76ndash88 2012
[9] C Bolin and A Engeda ldquoAnalysis of flow-induced instabilityin a redesigned steam control valverdquo Applied ermal En-gineering vol 83 pp 40ndash47 2015
[10] G Palau-Salvador P Gonzalez-Altozano and J Arviza-Valverde ldquoree-dimensional modeling and geometricalinfluence on the hydraulic performance of a control valverdquoJournal of Fluids Engineering vol 130 no 1 pp 151ndash1632008
[11] Y Xie Y Wang Y Liu F Cao and Y Pan ldquoUnsteadyanalyses of a control valve due to fluid-structure couplingrdquoMathematical Problems in Engineering vol 2013 Article ID174731 7 pages 2013
[12] J Tecza G Chochua and R Moll ldquoAnalysis of fluid-structureinteraction in a steam turbine throttle valverdquo in ProceedingsOf the ASME Turbo Expo Power for Land Sea and Airpp 2329ndash2338 Glasgow UK June 2010
[13] X Sun X Li Z Zheng and D Huang ldquoFluid-structure in-teraction analysis of a high-pressure regulating valve of a 600-MW ultra-supercritical steam turbinerdquo Proceedings of theInstitution of Mechanical Engineers Part A Journal of Powerand Energy vol 229 no 3 pp 270ndash279 2015
[14] H Wang M-j Peng Y-k Liu S-w Liu R-y Xu andH Saeed ldquoRemaining useful life prediction techniques ofelectric valves for nuclear power plants with convolutionkernel and LSTMrdquo Science and Technology of Nuclear In-stallations vol 2020 pp 1ndash13 2020
[15] R Fadaeinedjad M Moallem and G Moschopoulos ldquoSim-ulation of a wind turbine with doubly fed induction generatorby FAST and Simulinkrdquo IEEE Transactions on Energy Con-version vol 23 no 2 pp 690ndash700 2008
[16] R Zhang K P Lam S-c Yao and Y Zhang ldquoCoupledEnergyPlus and Computational Fluid Dynamics Simulationfor Natural Ventilationrdquo Building and Environment vol 68pp 100ndash113 2013
[17] T Kerh J J Lee and L C Wellford ldquoTransient fluid-structure interaction in a control valverdquo Journal of FluidsEngineering vol 119 no 2 pp 354ndash359 1997
[18] R Messahel C Regan M H Souli and C Ruiu ldquoNumericalinvestigation of homogeneous equilibrium model and fluid-structure interaction for multiphase water flows in pipesrdquoInternational Journal of Multiphase Flow vol 98 pp 56ndash662018
[19] LMS LMS ImagineLab AMESim Generic Co-simulation Rev13 Userrsquos Guide Roanne France 2013
[20] Emerson Electric Co Control Valve Handbook Lowa USA2005
[21] B Fitzgerald Control Valves for the Chemical Process In-dustries McGraw-Hill New York NY USA 1995
[22] V Yakhot and S A Orszag ldquoRenormalization group analysisof turbulence I Basic eoryrdquo Journal of Scientific Com-puting vol 1 no 1 pp 3ndash51 1986
[23] L Wang J Cui and K Yao ldquoNumerical simulation and analysisof gas flow field in serrated valve columnrdquo Chinese Journal ofChemical Engineering vol 16 no 4 pp 541ndash546 2008
[24] J-Y Qian Z-X Gao J-K Wang and Z-J Jin ldquoExperimentaland numerical analysis of spring stiffness on flow and valvecore movement in pilot control globe valverdquo InternationalJournal of Hydrogen Energy vol 42 no 27 pp 17192ndash172012017
14 Science and Technology of Nuclear Installations

valve plug was attached to a low-pressure region which wasprone to cavitation resulting in potential damage to thevalve plug
For the pressure field of t 0007 s the fluid pressure inthe valve cavity decreased from the bottom face to the upperface of the valve plug and the maximum pressure in thevicinity of the bottom of the valve plug was approximately98MPa In the subsequent 5ms the area occupied by thehigh-pressure region on the lower half surface of the valveplug gradually expanded at t 0012 s in particular thepressure in the partial region was approximately 10MPaReferring to the fluid load curve obtained by AMESimshown in Figure 13 the fluid load acting on the valve plugcontinuously increased within this period (from t 0007 s tot 0012 s) e main reason was that as the valve plugmoved toward the closing direction during this period theflow area of the orifice region became smaller and thepressure fluctuation in the valve cavity increased which leadto a larger area of the high-pressure region on the lowersurface of the plug On the other hand the fluid load on thevalve plug was obtained by integrating the surface area of thevalve plug with the pressure distribution on the upper andlower surfaces of the valve plug us the increase of thepressure difference between the lower and upper surfaces ofthe valve plug made the fluid load increase A similarphenomenon occurred in the period from t 0090 to0150 s erefore the calculation results of AMESim wereobserved to correspond with those of FLUENT
Figure 15 shows the sequence of the velocity magnitudecontours In the initial opening process of the valve plug fortlt 0005 s the flow area at the orifice was small e flowchannels were in a strong throttling state which caused thefluid pressure to decrease and the velocity to increase in theorifice region As the fluid accelerated through the narrowgap of the orifice the valve seat functioned as a throatresulting in a jet at t 0007 s that hit the valve plug at highvelocities After t 0012 s the valve plug moved toward theclosing direction and an asymmetric jet occurred at bothsides of the valve seat e asymmetric accelerating fluidcaused the hydraulic inductance owing to inertia It acted onthe surface of the valve plug and coupled with the movingvalve plug as well as the uneven pressure gradient in thisregion which were the main reasons for variable and os-cillating fluid loads on the valve plug (see Figure 13)
From Figure 16 the velocity of the jet region was higherthan that of the nearby fluid region when the fluid flowedthrough the orifice In the first 10ms the high-speed andlow-speed streams were mixed in the nearby regionresulting in a strong shear effect which caused the formationof vortices in the low-speed region Owing to the structuralobstruction vortices appeared on the left side and top wall ofthe valve body where the fluid stagnated and its velocitydecreased At t 0012 s vortex production at the lip of thevalve seat resulted in unsteady shedding and a large amountof energy was removed the phenomenon of vortex sheddingchanged the pressure distribution around the valve seat (seeFigure 14) which caused a sudden change in the fluid loadon the valve plug Furthermore the jet spread out further tothe valversquos downstream chamber which cannot avoid the
flow pathrsquos bend resulting in the formation of a recirculationregion as shown at t 0028 s is recirculation regionexpanded to the bottom of the downstream pipeline andoccupied the flow channel space Consequently the main-stream fluid was squeezed and its flow direction wasdisturbed
42 Dynamic Studies Related to Different Valve Plugs Tofurther explore the dynamic performance of the controlvalve plug we changed the shape of the valve plug eprofile curves of two other valve plugs with the flow char-acteristics of quick-opening and equal percentage weredesigned according to the calculation formula of the in-herent flow characteristic [20 21] and the cosimulations forthese two valves were conducted During the simulationprocess the initial opening percentage of the valve plugdesired flow rate at valve outlet boundary conditions andsolution parameters were unchanged e simulation resultswere as follows
Figure 17 shows the variation in fluid loads on the valveplug under different plug shapes By comparison we ob-served that in the first 1ms the fluid load acting on the equalpercentage plug exhibited high-frequency oscillations alongthe horizontal axis which was far greater than that of thefluid load acting on the other two types of valve plugserefore more load compensation was needed for the equalpercentage plug in this time period e oscillation trend ofthe unstable fluid loads acting on the quick-opening plugwas similar to that of the linear plug which was charac-terized by irregular and pulse-like fluctuations and itsfluctuation amplitude was larger than that of the linear plugAs the valve opening increased the amplitude attenuation ofthe fluid load acting on the linear plug was the fastest eoscillating fluid loads experienced by three different types ofvalve plugs gradually decreased and then fluctuated within asmall range When the valve plug attained equilibrium thefluid load acting on the quick-opening plug was the largestwhereas the equal percentage plug was the smallest whichdiffers by approximately 13 times as shown in Table 2
Figure 18 shows the dynamic change in the flow rate atthe valve outlet As the initial displacement of the valve plugincreased the outlet flow rate for the control valve with theflow characteristic of equal percentage fluctuated signifi-cantly within 1mse flow behavior was consistent with thehigh-frequency oscillating fluid loads (Figure 17) the largerthe flow fluctuation the greater the oscillating amplitude ofthe fluid load on the valve plug is process produced animpulsive force on the valve plug which would causestructural failure When the outlet flow rate for the threecontrol valves with different flow characteristics tended tothe desired value all the valve plugs were balanced to achievethe goal of controlling the flow rate behind the valve
Figure 19 shows the flow curves when three controlvalves were in a stable state We observed that the outlet flowrate for every control valve was approximate to the targetvalue but it had a certain deviation from the desired valueand the deviation degree was less than 001 as shown inTable 3 In combination with the actual situation the valve
Science and Technology of Nuclear Installations 11
could not completely maintain the desired value because offactors such as its own structure and external interferenceduring the working process erefore this result suggestedthat after three types of control valves with flow charac-teristics of equal percentage quick-opening and linearattained equilibrium their outlet flow rate value with thedesired value had slight differences
On the other hand although the valve plug was balancedthe flow rate at the valve outlet still exhibited slight fluc-tuations near the desired value To compare the stability timeof different valve plugs we analyzed how fast the outlet flowrate stabilizes for each valve plug considering a deviation of01 (within the engineering allowable range) as the stabilitycriterion In other words when the outlet flow rate becameand remained in the range of 79920ndash80080 Lmin it wasconsidered to have attained stability Figure 19 and Table 3show that the outlet flow of the control valve with the flowcharacteristic of equal percentage was the first to attain therange of this zone and its stability time was the shortest Incontrast the control valve with the flow characteristic ofquick-opening lagged behind the other two valves
In summary when a certain pressure is given at the inletand outlet of the control valve (in this study the inlet andoutlet pressures were 10 and 8MPa respectively) the valveplug moves from a 10 opening to the balance position tocontrol the flow behind the valve e stability time of thecontrol valve with the flow characteristic of equal percentageis fast but this valve plug is subjected to sharply rapidlyoscillating fluid loads in the movement process the quick-opening valve plug takes a long time to attain stability andthe fluid load acting on the plug is large in the balanceposition e fluctuation amplitude of the fluid load appliedto the linear valve plug is relatively low and the damage tothis valve plug is small In practice the selection and design
t = 0001s
t = 0012s
t = 0066s
t = 0150s
t = 0007s
t = 0028s
t = 0090s
t = 0600s
8075706560555045403530252015105Velocity (ms)
Figure 16 Streamlines at different simulation times
times104
ndash5
0
5
10
15
20
25
30
Flui
d lo
ad (N
)
007 008003 006005004002001000Time (s)
times10ndash4
times106
ndash25ndash20ndash15ndash10
ndash505
2 864 100
LinearQuick-openingEqual percentage
Figure 17 Transient variation of fluid loads on different plugsurfaces
Table 2 Fluid load difference at the balance position for differentvalve plugs
e fluid loadon the plug Linear Quick-opening Equal percentage
At the balanceposition (N) 207867 223922 171488
12 Science and Technology of Nuclear Installations
requirements for the control valve plug are different owingto different working environments For example wheninvolving the high-security region on the warship thecontrol valve is required to respond rapidly in an emergencyto achieve rapid regulation erefore the valve plugrsquos
stability time is the focus and the valve plug with faststability time should be selected For control valves that workfrequently the valve plug is constantly in the process ofdynamic adjustment so we should choose the valve plugwith a smaller fluctuation amplitude of the fluid load
5 Conclusion
Based on the FSI a cosimulation for the mechanical-electric-fluid system of the control valve was performed using theFLUENT and AMESim platforms e interaction effectbetween the valve components and fluid flow was com-prehensively considered rough the coupling calculationand data exchange of the two software the opening curve ofthe control valve in the dynamic adjustment process wasobtained e UDF and dynamic mesh technology were alsoused to solve the problem of instantaneous changes in thecalculation region caused by the valve plug movement
Compared with the pure simulations this study per-formed a synchronous analysis of the unsteady flow fieldcharacteristics in the valve cavity and the dynamic responseof the actuator As the valve plug dynamically moved aplurality of low-pressure zones of different sizes appeared inthe valve chamber because of the FSI effect e jet flowformed by the asymmetric high-speed fluid near the valveseat area was accompanied by the vortex shedding phe-nomenon Moreover we observed that the valve plug surfacewas subjected to unstable and oscillating fluid loads whicheasily caused the valve plug to vibrate ese dynamicsimulation results can give theoretical guidance for accu-rately compensating the additional fluid load on the valveplug
e behavior of the control valve with different flowcharacteristics was compared by changing the valve plugshape For inlet and outlet pressures of the control valve of10 and 8MPa respectively the valve plug beginning to movefrom the 10 opening position the results indicated that thecontrol valve with the flow characteristic of equal percentagewas sensitive to the effect of the fluid flowe fluctuation inthe flow rate at this valve outlet and the oscillation of thefluid load acting on this valve plug were high for a smallopening exceeding those of the control valves with the flowcharacteristics of quick-opening and linear And more loadcompensation was required for the equal percentage plug Inaddition the control valve with the flow characteristic ofequal percentage was the first to attain equilibrium with thefastest stability time whereas the control valve with the flowcharacteristic of quick-opening was the slowest When thecontrol valve was stable the deviation between the outletflow rate value and the desired value for every type of controlvalve with three different flow characteristics was negligible
times104
0
1
2
3
4
5
6
7
8
9
10
Volu
me fl
ow ra
te (L
min
)
006 008002 004000Time (s)
times10ndash4
times104
150 105 2030354045505560
LinearQuick-openingEqual percentage
Figure 18 Outlet flow rate of the control valve corresponding todifferent plugs
times104
2
3
4
5
6
7
8
9
Volu
me fl
ow ra
te (L
min
)
01 04 0600 02 0503Time (s)
79920
80080
80000
80003
060504030201
LinearQuick-openingEqual percentage
Figure 19 Outlet flow rate of the control valve corresponding todifferent plugs in the balance position
Table 3 Flow rate difference in stable value and stable time fordifferent valve plugs
e flow rate atvalve outlet Linear Quick-opening Equal
percentageStable value (Lmin) 8000085 8000115 8000183Stability time (s) 0198 0245 0187
Science and Technology of Nuclear Installations 13
Owing to the various types of warship control valves theoperating characteristics of the valves should be completelymastered according to the actual working environmentswhen selecting them is study provides a new insightscheme on the dynamic analysis and performance evaluationin control valves e results are significant to reduce thefailure rate of the warship control valve improve the controlaccuracy and prolong the life of the valve
Data Availability
e data used to support the findings of this study are in-cluded within the article
Conflicts of Interest
e authors declare no conflicts of interest
Acknowledgments
is research was funded by the National Natural ScienceFoundation of China (Grant nos 51775310 and 51875316) theKey Research and Development Project of Shandong Province(Grant no 2019GHY112052) the Natural Science Foundationof Shandong Province (Grant no ZR2019MEE025) the Na-tional Key Research and Development Project of China (Grantno 2016YFD0701104) and the Project for Scientific ResearchInnovation Team of Young Scholar in Colleges and Univer-sities of Shandong Province (Grant no 2020KJB001)
References
[1] V Ahuja A Hosangadi P Cavallo and R Daines ldquoAnalysesof transient events in complex valve and feed systemsrdquo inProceedings Of the 41st AIAAASMESAEASEE Joint Pro-pulsion Conference And Exhibit pp 1ndash13 Tucson AZ USAJuly 2005
[2] P A Cavallo A Hosangadi and V Ahuja ldquoTransient sim-ulations of valve motion in cryogenic systemsrdquo in ProceedingsOf the 35th AIAA Fluid Dynamics Conference And Exhibitpp 1ndash11 Toronto Ontario Canada June 2005
[3] J Shipman A Hosangadi and V Ahuja ldquoUnsteady analysesof valve systems in rocket engine testing environmentsrdquo inProceedings Of the 40th AIAAASMESAEASEE Joint Pro-pulsion Conference And Exhibit pp 1ndash10 Fort LauderdaleFlorida USA July 2004
[4] B K Saha H Chattopadhyay P B Mandal andT Gangopadhyay ldquoDynamic simulation of a pressure regu-lating and shut-off valverdquo Computers amp Fluids vol 101pp 233ndash240 2014
[5] A Beune J G M Kuerten and M P C van Heumen ldquoCFDanalysis with fluid-structure interaction of opening high-pressure safety valvesrdquo Computers amp Fluids vol 64 no 3pp 108ndash116 2012
[6] R Morita F Inada M Mori K Tezuka and Y TsujimotoldquoCFD simulations and experiments of flow fluctuationsaround a steam control valverdquo Journal of Fluids Engineeringvol 129 no 1 pp 48ndash54 2007
[7] A Misra K Behdinan and W L Cleghorn ldquoSelf-excitedvibration of a control valve due to fluid-structure interactionrdquoJournal of Fluids and Structures vol 16 no 5 pp 649ndash6652002
[8] K Yonezawa R Ogawa K Ogi et al ldquoFlow-induced vibrationof a steam control valverdquo Journal of Fluids and Structuresvol 35 no 776 pp 76ndash88 2012
[9] C Bolin and A Engeda ldquoAnalysis of flow-induced instabilityin a redesigned steam control valverdquo Applied ermal En-gineering vol 83 pp 40ndash47 2015
[10] G Palau-Salvador P Gonzalez-Altozano and J Arviza-Valverde ldquoree-dimensional modeling and geometricalinfluence on the hydraulic performance of a control valverdquoJournal of Fluids Engineering vol 130 no 1 pp 151ndash1632008
[11] Y Xie Y Wang Y Liu F Cao and Y Pan ldquoUnsteadyanalyses of a control valve due to fluid-structure couplingrdquoMathematical Problems in Engineering vol 2013 Article ID174731 7 pages 2013
[12] J Tecza G Chochua and R Moll ldquoAnalysis of fluid-structureinteraction in a steam turbine throttle valverdquo in ProceedingsOf the ASME Turbo Expo Power for Land Sea and Airpp 2329ndash2338 Glasgow UK June 2010
[13] X Sun X Li Z Zheng and D Huang ldquoFluid-structure in-teraction analysis of a high-pressure regulating valve of a 600-MW ultra-supercritical steam turbinerdquo Proceedings of theInstitution of Mechanical Engineers Part A Journal of Powerand Energy vol 229 no 3 pp 270ndash279 2015
[14] H Wang M-j Peng Y-k Liu S-w Liu R-y Xu andH Saeed ldquoRemaining useful life prediction techniques ofelectric valves for nuclear power plants with convolutionkernel and LSTMrdquo Science and Technology of Nuclear In-stallations vol 2020 pp 1ndash13 2020
[15] R Fadaeinedjad M Moallem and G Moschopoulos ldquoSim-ulation of a wind turbine with doubly fed induction generatorby FAST and Simulinkrdquo IEEE Transactions on Energy Con-version vol 23 no 2 pp 690ndash700 2008
[16] R Zhang K P Lam S-c Yao and Y Zhang ldquoCoupledEnergyPlus and Computational Fluid Dynamics Simulationfor Natural Ventilationrdquo Building and Environment vol 68pp 100ndash113 2013
[17] T Kerh J J Lee and L C Wellford ldquoTransient fluid-structure interaction in a control valverdquo Journal of FluidsEngineering vol 119 no 2 pp 354ndash359 1997
[18] R Messahel C Regan M H Souli and C Ruiu ldquoNumericalinvestigation of homogeneous equilibrium model and fluid-structure interaction for multiphase water flows in pipesrdquoInternational Journal of Multiphase Flow vol 98 pp 56ndash662018
[19] LMS LMS ImagineLab AMESim Generic Co-simulation Rev13 Userrsquos Guide Roanne France 2013
[20] Emerson Electric Co Control Valve Handbook Lowa USA2005
[21] B Fitzgerald Control Valves for the Chemical Process In-dustries McGraw-Hill New York NY USA 1995
[22] V Yakhot and S A Orszag ldquoRenormalization group analysisof turbulence I Basic eoryrdquo Journal of Scientific Com-puting vol 1 no 1 pp 3ndash51 1986
[23] L Wang J Cui and K Yao ldquoNumerical simulation and analysisof gas flow field in serrated valve columnrdquo Chinese Journal ofChemical Engineering vol 16 no 4 pp 541ndash546 2008
[24] J-Y Qian Z-X Gao J-K Wang and Z-J Jin ldquoExperimentaland numerical analysis of spring stiffness on flow and valvecore movement in pilot control globe valverdquo InternationalJournal of Hydrogen Energy vol 42 no 27 pp 17192ndash172012017
14 Science and Technology of Nuclear Installations

could not completely maintain the desired value because offactors such as its own structure and external interferenceduring the working process erefore this result suggestedthat after three types of control valves with flow charac-teristics of equal percentage quick-opening and linearattained equilibrium their outlet flow rate value with thedesired value had slight differences
On the other hand although the valve plug was balancedthe flow rate at the valve outlet still exhibited slight fluc-tuations near the desired value To compare the stability timeof different valve plugs we analyzed how fast the outlet flowrate stabilizes for each valve plug considering a deviation of01 (within the engineering allowable range) as the stabilitycriterion In other words when the outlet flow rate becameand remained in the range of 79920ndash80080 Lmin it wasconsidered to have attained stability Figure 19 and Table 3show that the outlet flow of the control valve with the flowcharacteristic of equal percentage was the first to attain therange of this zone and its stability time was the shortest Incontrast the control valve with the flow characteristic ofquick-opening lagged behind the other two valves
In summary when a certain pressure is given at the inletand outlet of the control valve (in this study the inlet andoutlet pressures were 10 and 8MPa respectively) the valveplug moves from a 10 opening to the balance position tocontrol the flow behind the valve e stability time of thecontrol valve with the flow characteristic of equal percentageis fast but this valve plug is subjected to sharply rapidlyoscillating fluid loads in the movement process the quick-opening valve plug takes a long time to attain stability andthe fluid load acting on the plug is large in the balanceposition e fluctuation amplitude of the fluid load appliedto the linear valve plug is relatively low and the damage tothis valve plug is small In practice the selection and design
t = 0001s
t = 0012s
t = 0066s
t = 0150s
t = 0007s
t = 0028s
t = 0090s
t = 0600s
8075706560555045403530252015105Velocity (ms)
Figure 16 Streamlines at different simulation times
times104
ndash5
0
5
10
15
20
25
30
Flui
d lo
ad (N
)
007 008003 006005004002001000Time (s)
times10ndash4
times106
ndash25ndash20ndash15ndash10
ndash505
2 864 100
LinearQuick-openingEqual percentage
Figure 17 Transient variation of fluid loads on different plugsurfaces
Table 2 Fluid load difference at the balance position for differentvalve plugs
e fluid loadon the plug Linear Quick-opening Equal percentage
At the balanceposition (N) 207867 223922 171488
12 Science and Technology of Nuclear Installations
requirements for the control valve plug are different owingto different working environments For example wheninvolving the high-security region on the warship thecontrol valve is required to respond rapidly in an emergencyto achieve rapid regulation erefore the valve plugrsquos
stability time is the focus and the valve plug with faststability time should be selected For control valves that workfrequently the valve plug is constantly in the process ofdynamic adjustment so we should choose the valve plugwith a smaller fluctuation amplitude of the fluid load
5 Conclusion
Based on the FSI a cosimulation for the mechanical-electric-fluid system of the control valve was performed using theFLUENT and AMESim platforms e interaction effectbetween the valve components and fluid flow was com-prehensively considered rough the coupling calculationand data exchange of the two software the opening curve ofthe control valve in the dynamic adjustment process wasobtained e UDF and dynamic mesh technology were alsoused to solve the problem of instantaneous changes in thecalculation region caused by the valve plug movement
Compared with the pure simulations this study per-formed a synchronous analysis of the unsteady flow fieldcharacteristics in the valve cavity and the dynamic responseof the actuator As the valve plug dynamically moved aplurality of low-pressure zones of different sizes appeared inthe valve chamber because of the FSI effect e jet flowformed by the asymmetric high-speed fluid near the valveseat area was accompanied by the vortex shedding phe-nomenon Moreover we observed that the valve plug surfacewas subjected to unstable and oscillating fluid loads whicheasily caused the valve plug to vibrate ese dynamicsimulation results can give theoretical guidance for accu-rately compensating the additional fluid load on the valveplug
e behavior of the control valve with different flowcharacteristics was compared by changing the valve plugshape For inlet and outlet pressures of the control valve of10 and 8MPa respectively the valve plug beginning to movefrom the 10 opening position the results indicated that thecontrol valve with the flow characteristic of equal percentagewas sensitive to the effect of the fluid flowe fluctuation inthe flow rate at this valve outlet and the oscillation of thefluid load acting on this valve plug were high for a smallopening exceeding those of the control valves with the flowcharacteristics of quick-opening and linear And more loadcompensation was required for the equal percentage plug Inaddition the control valve with the flow characteristic ofequal percentage was the first to attain equilibrium with thefastest stability time whereas the control valve with the flowcharacteristic of quick-opening was the slowest When thecontrol valve was stable the deviation between the outletflow rate value and the desired value for every type of controlvalve with three different flow characteristics was negligible
times104
0
1
2
3
4
5
6
7
8
9
10
Volu
me fl
ow ra
te (L
min
)
006 008002 004000Time (s)
times10ndash4
times104
150 105 2030354045505560
LinearQuick-openingEqual percentage
Figure 18 Outlet flow rate of the control valve corresponding todifferent plugs
times104
2
3
4
5
6
7
8
9
Volu
me fl
ow ra
te (L
min
)
01 04 0600 02 0503Time (s)
79920
80080
80000
80003
060504030201
LinearQuick-openingEqual percentage
Figure 19 Outlet flow rate of the control valve corresponding todifferent plugs in the balance position
Table 3 Flow rate difference in stable value and stable time fordifferent valve plugs
e flow rate atvalve outlet Linear Quick-opening Equal
percentageStable value (Lmin) 8000085 8000115 8000183Stability time (s) 0198 0245 0187
Science and Technology of Nuclear Installations 13
Owing to the various types of warship control valves theoperating characteristics of the valves should be completelymastered according to the actual working environmentswhen selecting them is study provides a new insightscheme on the dynamic analysis and performance evaluationin control valves e results are significant to reduce thefailure rate of the warship control valve improve the controlaccuracy and prolong the life of the valve
Data Availability
e data used to support the findings of this study are in-cluded within the article
Conflicts of Interest
e authors declare no conflicts of interest
Acknowledgments
is research was funded by the National Natural ScienceFoundation of China (Grant nos 51775310 and 51875316) theKey Research and Development Project of Shandong Province(Grant no 2019GHY112052) the Natural Science Foundationof Shandong Province (Grant no ZR2019MEE025) the Na-tional Key Research and Development Project of China (Grantno 2016YFD0701104) and the Project for Scientific ResearchInnovation Team of Young Scholar in Colleges and Univer-sities of Shandong Province (Grant no 2020KJB001)
References
[1] V Ahuja A Hosangadi P Cavallo and R Daines ldquoAnalysesof transient events in complex valve and feed systemsrdquo inProceedings Of the 41st AIAAASMESAEASEE Joint Pro-pulsion Conference And Exhibit pp 1ndash13 Tucson AZ USAJuly 2005
[2] P A Cavallo A Hosangadi and V Ahuja ldquoTransient sim-ulations of valve motion in cryogenic systemsrdquo in ProceedingsOf the 35th AIAA Fluid Dynamics Conference And Exhibitpp 1ndash11 Toronto Ontario Canada June 2005
[3] J Shipman A Hosangadi and V Ahuja ldquoUnsteady analysesof valve systems in rocket engine testing environmentsrdquo inProceedings Of the 40th AIAAASMESAEASEE Joint Pro-pulsion Conference And Exhibit pp 1ndash10 Fort LauderdaleFlorida USA July 2004
[4] B K Saha H Chattopadhyay P B Mandal andT Gangopadhyay ldquoDynamic simulation of a pressure regu-lating and shut-off valverdquo Computers amp Fluids vol 101pp 233ndash240 2014
[5] A Beune J G M Kuerten and M P C van Heumen ldquoCFDanalysis with fluid-structure interaction of opening high-pressure safety valvesrdquo Computers amp Fluids vol 64 no 3pp 108ndash116 2012
[6] R Morita F Inada M Mori K Tezuka and Y TsujimotoldquoCFD simulations and experiments of flow fluctuationsaround a steam control valverdquo Journal of Fluids Engineeringvol 129 no 1 pp 48ndash54 2007
[7] A Misra K Behdinan and W L Cleghorn ldquoSelf-excitedvibration of a control valve due to fluid-structure interactionrdquoJournal of Fluids and Structures vol 16 no 5 pp 649ndash6652002
[8] K Yonezawa R Ogawa K Ogi et al ldquoFlow-induced vibrationof a steam control valverdquo Journal of Fluids and Structuresvol 35 no 776 pp 76ndash88 2012
[9] C Bolin and A Engeda ldquoAnalysis of flow-induced instabilityin a redesigned steam control valverdquo Applied ermal En-gineering vol 83 pp 40ndash47 2015
[10] G Palau-Salvador P Gonzalez-Altozano and J Arviza-Valverde ldquoree-dimensional modeling and geometricalinfluence on the hydraulic performance of a control valverdquoJournal of Fluids Engineering vol 130 no 1 pp 151ndash1632008
[11] Y Xie Y Wang Y Liu F Cao and Y Pan ldquoUnsteadyanalyses of a control valve due to fluid-structure couplingrdquoMathematical Problems in Engineering vol 2013 Article ID174731 7 pages 2013
[12] J Tecza G Chochua and R Moll ldquoAnalysis of fluid-structureinteraction in a steam turbine throttle valverdquo in ProceedingsOf the ASME Turbo Expo Power for Land Sea and Airpp 2329ndash2338 Glasgow UK June 2010
[13] X Sun X Li Z Zheng and D Huang ldquoFluid-structure in-teraction analysis of a high-pressure regulating valve of a 600-MW ultra-supercritical steam turbinerdquo Proceedings of theInstitution of Mechanical Engineers Part A Journal of Powerand Energy vol 229 no 3 pp 270ndash279 2015
[14] H Wang M-j Peng Y-k Liu S-w Liu R-y Xu andH Saeed ldquoRemaining useful life prediction techniques ofelectric valves for nuclear power plants with convolutionkernel and LSTMrdquo Science and Technology of Nuclear In-stallations vol 2020 pp 1ndash13 2020
[15] R Fadaeinedjad M Moallem and G Moschopoulos ldquoSim-ulation of a wind turbine with doubly fed induction generatorby FAST and Simulinkrdquo IEEE Transactions on Energy Con-version vol 23 no 2 pp 690ndash700 2008
[16] R Zhang K P Lam S-c Yao and Y Zhang ldquoCoupledEnergyPlus and Computational Fluid Dynamics Simulationfor Natural Ventilationrdquo Building and Environment vol 68pp 100ndash113 2013
[17] T Kerh J J Lee and L C Wellford ldquoTransient fluid-structure interaction in a control valverdquo Journal of FluidsEngineering vol 119 no 2 pp 354ndash359 1997
[18] R Messahel C Regan M H Souli and C Ruiu ldquoNumericalinvestigation of homogeneous equilibrium model and fluid-structure interaction for multiphase water flows in pipesrdquoInternational Journal of Multiphase Flow vol 98 pp 56ndash662018
[19] LMS LMS ImagineLab AMESim Generic Co-simulation Rev13 Userrsquos Guide Roanne France 2013
[20] Emerson Electric Co Control Valve Handbook Lowa USA2005
[21] B Fitzgerald Control Valves for the Chemical Process In-dustries McGraw-Hill New York NY USA 1995
[22] V Yakhot and S A Orszag ldquoRenormalization group analysisof turbulence I Basic eoryrdquo Journal of Scientific Com-puting vol 1 no 1 pp 3ndash51 1986
[23] L Wang J Cui and K Yao ldquoNumerical simulation and analysisof gas flow field in serrated valve columnrdquo Chinese Journal ofChemical Engineering vol 16 no 4 pp 541ndash546 2008
[24] J-Y Qian Z-X Gao J-K Wang and Z-J Jin ldquoExperimentaland numerical analysis of spring stiffness on flow and valvecore movement in pilot control globe valverdquo InternationalJournal of Hydrogen Energy vol 42 no 27 pp 17192ndash172012017
14 Science and Technology of Nuclear Installations

requirements for the control valve plug are different owingto different working environments For example wheninvolving the high-security region on the warship thecontrol valve is required to respond rapidly in an emergencyto achieve rapid regulation erefore the valve plugrsquos
stability time is the focus and the valve plug with faststability time should be selected For control valves that workfrequently the valve plug is constantly in the process ofdynamic adjustment so we should choose the valve plugwith a smaller fluctuation amplitude of the fluid load
5 Conclusion
Based on the FSI a cosimulation for the mechanical-electric-fluid system of the control valve was performed using theFLUENT and AMESim platforms e interaction effectbetween the valve components and fluid flow was com-prehensively considered rough the coupling calculationand data exchange of the two software the opening curve ofthe control valve in the dynamic adjustment process wasobtained e UDF and dynamic mesh technology were alsoused to solve the problem of instantaneous changes in thecalculation region caused by the valve plug movement
Compared with the pure simulations this study per-formed a synchronous analysis of the unsteady flow fieldcharacteristics in the valve cavity and the dynamic responseof the actuator As the valve plug dynamically moved aplurality of low-pressure zones of different sizes appeared inthe valve chamber because of the FSI effect e jet flowformed by the asymmetric high-speed fluid near the valveseat area was accompanied by the vortex shedding phe-nomenon Moreover we observed that the valve plug surfacewas subjected to unstable and oscillating fluid loads whicheasily caused the valve plug to vibrate ese dynamicsimulation results can give theoretical guidance for accu-rately compensating the additional fluid load on the valveplug
e behavior of the control valve with different flowcharacteristics was compared by changing the valve plugshape For inlet and outlet pressures of the control valve of10 and 8MPa respectively the valve plug beginning to movefrom the 10 opening position the results indicated that thecontrol valve with the flow characteristic of equal percentagewas sensitive to the effect of the fluid flowe fluctuation inthe flow rate at this valve outlet and the oscillation of thefluid load acting on this valve plug were high for a smallopening exceeding those of the control valves with the flowcharacteristics of quick-opening and linear And more loadcompensation was required for the equal percentage plug Inaddition the control valve with the flow characteristic ofequal percentage was the first to attain equilibrium with thefastest stability time whereas the control valve with the flowcharacteristic of quick-opening was the slowest When thecontrol valve was stable the deviation between the outletflow rate value and the desired value for every type of controlvalve with three different flow characteristics was negligible
times104
0
1
2
3
4
5
6
7
8
9
10
Volu
me fl
ow ra
te (L
min
)
006 008002 004000Time (s)
times10ndash4
times104
150 105 2030354045505560
LinearQuick-openingEqual percentage
Figure 18 Outlet flow rate of the control valve corresponding todifferent plugs
times104
2
3
4
5
6
7
8
9
Volu
me fl
ow ra
te (L
min
)
01 04 0600 02 0503Time (s)
79920
80080
80000
80003
060504030201
LinearQuick-openingEqual percentage
Figure 19 Outlet flow rate of the control valve corresponding todifferent plugs in the balance position
Table 3 Flow rate difference in stable value and stable time fordifferent valve plugs
e flow rate atvalve outlet Linear Quick-opening Equal
percentageStable value (Lmin) 8000085 8000115 8000183Stability time (s) 0198 0245 0187
Science and Technology of Nuclear Installations 13
Owing to the various types of warship control valves theoperating characteristics of the valves should be completelymastered according to the actual working environmentswhen selecting them is study provides a new insightscheme on the dynamic analysis and performance evaluationin control valves e results are significant to reduce thefailure rate of the warship control valve improve the controlaccuracy and prolong the life of the valve
Data Availability
e data used to support the findings of this study are in-cluded within the article
Conflicts of Interest
e authors declare no conflicts of interest
Acknowledgments
is research was funded by the National Natural ScienceFoundation of China (Grant nos 51775310 and 51875316) theKey Research and Development Project of Shandong Province(Grant no 2019GHY112052) the Natural Science Foundationof Shandong Province (Grant no ZR2019MEE025) the Na-tional Key Research and Development Project of China (Grantno 2016YFD0701104) and the Project for Scientific ResearchInnovation Team of Young Scholar in Colleges and Univer-sities of Shandong Province (Grant no 2020KJB001)
References
[1] V Ahuja A Hosangadi P Cavallo and R Daines ldquoAnalysesof transient events in complex valve and feed systemsrdquo inProceedings Of the 41st AIAAASMESAEASEE Joint Pro-pulsion Conference And Exhibit pp 1ndash13 Tucson AZ USAJuly 2005
[2] P A Cavallo A Hosangadi and V Ahuja ldquoTransient sim-ulations of valve motion in cryogenic systemsrdquo in ProceedingsOf the 35th AIAA Fluid Dynamics Conference And Exhibitpp 1ndash11 Toronto Ontario Canada June 2005
[3] J Shipman A Hosangadi and V Ahuja ldquoUnsteady analysesof valve systems in rocket engine testing environmentsrdquo inProceedings Of the 40th AIAAASMESAEASEE Joint Pro-pulsion Conference And Exhibit pp 1ndash10 Fort LauderdaleFlorida USA July 2004
[4] B K Saha H Chattopadhyay P B Mandal andT Gangopadhyay ldquoDynamic simulation of a pressure regu-lating and shut-off valverdquo Computers amp Fluids vol 101pp 233ndash240 2014
[5] A Beune J G M Kuerten and M P C van Heumen ldquoCFDanalysis with fluid-structure interaction of opening high-pressure safety valvesrdquo Computers amp Fluids vol 64 no 3pp 108ndash116 2012
[6] R Morita F Inada M Mori K Tezuka and Y TsujimotoldquoCFD simulations and experiments of flow fluctuationsaround a steam control valverdquo Journal of Fluids Engineeringvol 129 no 1 pp 48ndash54 2007
[7] A Misra K Behdinan and W L Cleghorn ldquoSelf-excitedvibration of a control valve due to fluid-structure interactionrdquoJournal of Fluids and Structures vol 16 no 5 pp 649ndash6652002
[8] K Yonezawa R Ogawa K Ogi et al ldquoFlow-induced vibrationof a steam control valverdquo Journal of Fluids and Structuresvol 35 no 776 pp 76ndash88 2012
[9] C Bolin and A Engeda ldquoAnalysis of flow-induced instabilityin a redesigned steam control valverdquo Applied ermal En-gineering vol 83 pp 40ndash47 2015
[10] G Palau-Salvador P Gonzalez-Altozano and J Arviza-Valverde ldquoree-dimensional modeling and geometricalinfluence on the hydraulic performance of a control valverdquoJournal of Fluids Engineering vol 130 no 1 pp 151ndash1632008
[11] Y Xie Y Wang Y Liu F Cao and Y Pan ldquoUnsteadyanalyses of a control valve due to fluid-structure couplingrdquoMathematical Problems in Engineering vol 2013 Article ID174731 7 pages 2013
[12] J Tecza G Chochua and R Moll ldquoAnalysis of fluid-structureinteraction in a steam turbine throttle valverdquo in ProceedingsOf the ASME Turbo Expo Power for Land Sea and Airpp 2329ndash2338 Glasgow UK June 2010
[13] X Sun X Li Z Zheng and D Huang ldquoFluid-structure in-teraction analysis of a high-pressure regulating valve of a 600-MW ultra-supercritical steam turbinerdquo Proceedings of theInstitution of Mechanical Engineers Part A Journal of Powerand Energy vol 229 no 3 pp 270ndash279 2015
[14] H Wang M-j Peng Y-k Liu S-w Liu R-y Xu andH Saeed ldquoRemaining useful life prediction techniques ofelectric valves for nuclear power plants with convolutionkernel and LSTMrdquo Science and Technology of Nuclear In-stallations vol 2020 pp 1ndash13 2020
[15] R Fadaeinedjad M Moallem and G Moschopoulos ldquoSim-ulation of a wind turbine with doubly fed induction generatorby FAST and Simulinkrdquo IEEE Transactions on Energy Con-version vol 23 no 2 pp 690ndash700 2008
[16] R Zhang K P Lam S-c Yao and Y Zhang ldquoCoupledEnergyPlus and Computational Fluid Dynamics Simulationfor Natural Ventilationrdquo Building and Environment vol 68pp 100ndash113 2013
[17] T Kerh J J Lee and L C Wellford ldquoTransient fluid-structure interaction in a control valverdquo Journal of FluidsEngineering vol 119 no 2 pp 354ndash359 1997
[18] R Messahel C Regan M H Souli and C Ruiu ldquoNumericalinvestigation of homogeneous equilibrium model and fluid-structure interaction for multiphase water flows in pipesrdquoInternational Journal of Multiphase Flow vol 98 pp 56ndash662018
[19] LMS LMS ImagineLab AMESim Generic Co-simulation Rev13 Userrsquos Guide Roanne France 2013
[20] Emerson Electric Co Control Valve Handbook Lowa USA2005
[21] B Fitzgerald Control Valves for the Chemical Process In-dustries McGraw-Hill New York NY USA 1995
[22] V Yakhot and S A Orszag ldquoRenormalization group analysisof turbulence I Basic eoryrdquo Journal of Scientific Com-puting vol 1 no 1 pp 3ndash51 1986
[23] L Wang J Cui and K Yao ldquoNumerical simulation and analysisof gas flow field in serrated valve columnrdquo Chinese Journal ofChemical Engineering vol 16 no 4 pp 541ndash546 2008
[24] J-Y Qian Z-X Gao J-K Wang and Z-J Jin ldquoExperimentaland numerical analysis of spring stiffness on flow and valvecore movement in pilot control globe valverdquo InternationalJournal of Hydrogen Energy vol 42 no 27 pp 17192ndash172012017
14 Science and Technology of Nuclear Installations

Owing to the various types of warship control valves theoperating characteristics of the valves should be completelymastered according to the actual working environmentswhen selecting them is study provides a new insightscheme on the dynamic analysis and performance evaluationin control valves e results are significant to reduce thefailure rate of the warship control valve improve the controlaccuracy and prolong the life of the valve
Data Availability
e data used to support the findings of this study are in-cluded within the article
Conflicts of Interest
e authors declare no conflicts of interest
Acknowledgments
is research was funded by the National Natural ScienceFoundation of China (Grant nos 51775310 and 51875316) theKey Research and Development Project of Shandong Province(Grant no 2019GHY112052) the Natural Science Foundationof Shandong Province (Grant no ZR2019MEE025) the Na-tional Key Research and Development Project of China (Grantno 2016YFD0701104) and the Project for Scientific ResearchInnovation Team of Young Scholar in Colleges and Univer-sities of Shandong Province (Grant no 2020KJB001)
References
[1] V Ahuja A Hosangadi P Cavallo and R Daines ldquoAnalysesof transient events in complex valve and feed systemsrdquo inProceedings Of the 41st AIAAASMESAEASEE Joint Pro-pulsion Conference And Exhibit pp 1ndash13 Tucson AZ USAJuly 2005
[2] P A Cavallo A Hosangadi and V Ahuja ldquoTransient sim-ulations of valve motion in cryogenic systemsrdquo in ProceedingsOf the 35th AIAA Fluid Dynamics Conference And Exhibitpp 1ndash11 Toronto Ontario Canada June 2005
[3] J Shipman A Hosangadi and V Ahuja ldquoUnsteady analysesof valve systems in rocket engine testing environmentsrdquo inProceedings Of the 40th AIAAASMESAEASEE Joint Pro-pulsion Conference And Exhibit pp 1ndash10 Fort LauderdaleFlorida USA July 2004
[4] B K Saha H Chattopadhyay P B Mandal andT Gangopadhyay ldquoDynamic simulation of a pressure regu-lating and shut-off valverdquo Computers amp Fluids vol 101pp 233ndash240 2014
[5] A Beune J G M Kuerten and M P C van Heumen ldquoCFDanalysis with fluid-structure interaction of opening high-pressure safety valvesrdquo Computers amp Fluids vol 64 no 3pp 108ndash116 2012
[6] R Morita F Inada M Mori K Tezuka and Y TsujimotoldquoCFD simulations and experiments of flow fluctuationsaround a steam control valverdquo Journal of Fluids Engineeringvol 129 no 1 pp 48ndash54 2007
[7] A Misra K Behdinan and W L Cleghorn ldquoSelf-excitedvibration of a control valve due to fluid-structure interactionrdquoJournal of Fluids and Structures vol 16 no 5 pp 649ndash6652002
[8] K Yonezawa R Ogawa K Ogi et al ldquoFlow-induced vibrationof a steam control valverdquo Journal of Fluids and Structuresvol 35 no 776 pp 76ndash88 2012
[9] C Bolin and A Engeda ldquoAnalysis of flow-induced instabilityin a redesigned steam control valverdquo Applied ermal En-gineering vol 83 pp 40ndash47 2015
[10] G Palau-Salvador P Gonzalez-Altozano and J Arviza-Valverde ldquoree-dimensional modeling and geometricalinfluence on the hydraulic performance of a control valverdquoJournal of Fluids Engineering vol 130 no 1 pp 151ndash1632008
[11] Y Xie Y Wang Y Liu F Cao and Y Pan ldquoUnsteadyanalyses of a control valve due to fluid-structure couplingrdquoMathematical Problems in Engineering vol 2013 Article ID174731 7 pages 2013
[12] J Tecza G Chochua and R Moll ldquoAnalysis of fluid-structureinteraction in a steam turbine throttle valverdquo in ProceedingsOf the ASME Turbo Expo Power for Land Sea and Airpp 2329ndash2338 Glasgow UK June 2010
[13] X Sun X Li Z Zheng and D Huang ldquoFluid-structure in-teraction analysis of a high-pressure regulating valve of a 600-MW ultra-supercritical steam turbinerdquo Proceedings of theInstitution of Mechanical Engineers Part A Journal of Powerand Energy vol 229 no 3 pp 270ndash279 2015
[14] H Wang M-j Peng Y-k Liu S-w Liu R-y Xu andH Saeed ldquoRemaining useful life prediction techniques ofelectric valves for nuclear power plants with convolutionkernel and LSTMrdquo Science and Technology of Nuclear In-stallations vol 2020 pp 1ndash13 2020
[15] R Fadaeinedjad M Moallem and G Moschopoulos ldquoSim-ulation of a wind turbine with doubly fed induction generatorby FAST and Simulinkrdquo IEEE Transactions on Energy Con-version vol 23 no 2 pp 690ndash700 2008
[16] R Zhang K P Lam S-c Yao and Y Zhang ldquoCoupledEnergyPlus and Computational Fluid Dynamics Simulationfor Natural Ventilationrdquo Building and Environment vol 68pp 100ndash113 2013
[17] T Kerh J J Lee and L C Wellford ldquoTransient fluid-structure interaction in a control valverdquo Journal of FluidsEngineering vol 119 no 2 pp 354ndash359 1997
[18] R Messahel C Regan M H Souli and C Ruiu ldquoNumericalinvestigation of homogeneous equilibrium model and fluid-structure interaction for multiphase water flows in pipesrdquoInternational Journal of Multiphase Flow vol 98 pp 56ndash662018
[19] LMS LMS ImagineLab AMESim Generic Co-simulation Rev13 Userrsquos Guide Roanne France 2013
[20] Emerson Electric Co Control Valve Handbook Lowa USA2005
[21] B Fitzgerald Control Valves for the Chemical Process In-dustries McGraw-Hill New York NY USA 1995
[22] V Yakhot and S A Orszag ldquoRenormalization group analysisof turbulence I Basic eoryrdquo Journal of Scientific Com-puting vol 1 no 1 pp 3ndash51 1986
[23] L Wang J Cui and K Yao ldquoNumerical simulation and analysisof gas flow field in serrated valve columnrdquo Chinese Journal ofChemical Engineering vol 16 no 4 pp 541ndash546 2008
[24] J-Y Qian Z-X Gao J-K Wang and Z-J Jin ldquoExperimentaland numerical analysis of spring stiffness on flow and valvecore movement in pilot control globe valverdquo InternationalJournal of Hydrogen Energy vol 42 no 27 pp 17192ndash172012017
14 Science and Technology of Nuclear Installations