Embed Size (px)
Citation preview
V I L M A P E T R A U S K I E N Ė
S U M M A R Y O F D O C T O R A L D I S S E R T A T I O N
K a u n a s2 0 1 5
D Y N A M I C V I S U A L C R Y P T O G R A P H Y B A S E D
O N N O N - L I N E A R O S C I L L A T I O N S
T E C H N O L O G I C A L S C I E N C E S , M E C H A N I C A L
E N G I N E E R I N G ( 0 9 T )
KAUNAS UNIVERSITY OF TECHNOLOGY
VILMA PETRAUSKIENブ
DYNAMIC VISUAL CRYPTOGRAPHY BASED ON NON-LINEAR OSCILLATIONS
Summary of Doctoral Dissertation Technological Sciences, Mechanical Engineering (09T)
2015, KAUNAS
The research was accomplished during the period of 2010 – 2014 at Kaunas University of Technology, Faculty of Mathematics and Natural Sciences, Department of Mathematical Modelling. The research was supported by Lithuanian State Science and Studies Foundation and Research Council of Lithuania.
Scientific supervisor:
Prof. Dr. Habil. Minvydas Kazys RAGULSKIS (Kaunas University of Technology, Technological Sciences, Mechanical Engineering – 09T).
Dissertation Defense Board of Mechanical Engineering Science Field:
Prof. Dr. Habil. Vytautas OSTAŠEVIČIUS (Kaunas University of Technology, Technological Sciences, Mechanical Engineering – 09T) – chairman;
Prof. Dr. Rimvydas GAIDYS (Kaunas University of Technology, Technological Sciences, Mechanical Engineering – 09T);
Prof. Dr. Vytenis JANKAUSKAS (Aleksandras Stulginskis University, Technological Sciences, Mechanical Engineering – 09T);
Assoc. Prof. Dr. Giedrius JANUŠAS (Kaunas University of Technology, Technological Sciences, Mechanical Engineering – 09T);
Prof. Dr. Habil. Genadijus KULVIETIS (Vilnius Gediminas Technical University, Technological Sciences, Mechanical Engineering – 09T);
Prof. Dr. Habil. Arvydas PALEVIČIUS (Kaunas University of Technology, Technological Sciences, Mechanical Engineering – 09T).
The official defense of the dissertation will be held at 10 a.m. on 27th of March, 2015 at the Board of Mechanical Engineering Science Field public meeting in the Dissertation Defense Hall at the Central Building of Kaunas University of Technology.
Adress: K. Donelaičio str. 73-403, LT-44029 Kaunas, Lithuania.
The summary of dissertation was sent on 27th February, 2015.
The dissertation is available on the internet (http://ktu.edu) and at the library of Kaunas University of Technology (K. Donelaičio str. 20, LT-44239, Kaunas, Lithuania).

KAUNO TECHNOLOGIJOS UNIVERSITETAS
VILMA PETRAUSKIENブ
VIZUALINブS KRIPTOGRAFIJOS SISTEMOS PAGRSTOS NETIESINIAIS VIRPESIAIS
Daktaro disertacijos santrauka Technologijos mokslai, mechanikos inžinerija (09T)
2015, KAUNAS
Disertacija rengta 2010–2014 metais Kauno technologijos universitete, Matematikos ir gamtos moksl fakultete, Matematinio modeliavimo katedroje, remiant Lietuvos valstybiniam mokslo ir studij fondui ir Lietuvos mokslo tarybai.
Mokslinis vadovas:
prof. habil. dr. Minvydas Kazys RAGULSKIS (Kauno technologijos universitetas, technologiniai mokslai, mechanikos inžinerija – 09T).
Mechanikos inžinerijos mokslo krypties taryba:
prof. habil. dr. Vytautas OSTAŠEVIČIUS (Kauno technologijos universitetas, technologijos mokslai, mechanikos inžinerija – 09T) – pirmininkas;
prof. dr. Rimvydas GAIDYS (Kauno technologijos universitetas, technologijos mokslai, mechanikos inžinerija – 09T);
prof. dr. Vytenis JANKAUSKAS (Aleksandro Stulginskio universitetas, technologijos mokslai, mechanikos inžinerija – 09T);
doc. dr. Giedrius JANUŠAS (Kauno technologijos universitetas, technologijos mokslai, mechanikos inžinerija – 09T);
prof. habil.dr. Genadijus KULVIETIS (Vilniaus Gedimino technikos universitetas, technologijos mokslai, mechanikos inžinerija – 09T);
prof. habil. dr. Arvydas PALEVIČIUS (Kauno technologijos universitetas, technologijos mokslai, mechanikos inžinerija – 09T).
Disertacija bus ginama viešame mechanikos inžinerijos mokslo krypties disertacijos gynimo tarybos posプdyje 2015 m. kovo 27 d. 10 val. Kauno technologijos universiteto centrini rm disertacij gynimo salプje.
Adresas: K. Donelaičio g. 73-403, 44029 Kaunas, Lietuva.
Disertacijos santrauka išsista 2015 m. vasario 27 d.
Disertacija galima peržirプti internete (http://ktu.edu) ir Kauno technologijos universiteto bibliotekoje (K. Donelaičio g. 20, Kaunas).
5
INTRODUCTION
Relevance of the topic Investigation of visual cryptography systems covers such complex
questions as formation of interference time-averaged moiré patterns, ill-conditioned inverse problems, and control of chaotic attractors. The researches necessary for this topic may be relatively divided into the following groups: moiré optics, cryptography, analysis of chaotic systems, and experimental studies. All of these research fields are closely interrelated with each other and united by the investigated processes in the context of non-linear oscillations.
The method of dynamic visual cryptography and its algorithmic realisation was suggested in 2009 [1]. It has been essential to continue the previous investigations on dynamic visual cryptography and transfer them on the experimental level. Researches in visual cryptography are closely related with the realisations of time-averaged optical methods. These realisations are used for construction of experimental moiré equipment to realise dynamic visual cryptography.
It has been necessary to carry out not only researches that are based on encoded image oscillation using a shaker table, with a possibility to ensure required parameters of oscillations but also to implement the decoding algorithms on the computer screen. The works related to the analysed topic widen the achievements in the fields of the theory and application of non-linear dynamical systems and oscillations, as well as provide conditions for the further research efforts in dynamic visual cryptography.
The object of the research: optical experimental realisations of time-averaged moiré methods intended for the applications of dynamic visual cryptography.
The objective of the research: to create and experimentally realise the conception of dynamic visual cryptography based on non-linear oscillations.
To achieve the formulated objective, the following problems are solved:
1. To carry out the theoretical analysis by searching for the ways to increase the security of dynamic visual cryptography using non-linear oscillations.
2. To formulate the target function for determining the trajectory of optimal decoding, to solve formulated optimisation task using genetic algorithms.
3. To design appropriate means of vibration generation, control and optics for experimental realisation of increased security visual cryptography.
4. To investigate and test experimentally the possibility to realise dynamic visual cryptography effects using chaotic oscillations.
6
5. To create experimental equipment operating on the principle of dynamic visual cryptography intended for the diagnostics of human vision.
The methods and software for the research: • The theory of optical moiré method has been used for the researches
which is extended and further developed. • For the creation and realisation of dynamic visual cryptography
conception based on non-linear oscillations, information visualisation and processing methods have been used that are based on mathematical and statistical analysis, principles of digital image processing.
• To perform the investigations, the software tools such as computing environment Matlab R2009b has been used for the analysis of images and Matlab toolboxes have been used for the processing of the data.
• For the creation of experimental software, Adobe software has been used (Adobe Flach Profesional CS8).
• The obtained results of the experiments have been processed by mathematical statistics methods using IBM SPSS Statistics programme.
Scientific novelty and practical significance of the research: • An optimal time function has been found and methods of visual
encoding in the moiré grating have enabled to increase the security of dynamic visual cryptography.
• To determine the reliability of oscillations, non-contact optical methodology has been proposed allowing determining faults without any additional measures in the vibrating constructions.
• To evaluate the intensity of optical chaotic oscillations, methodologies based on the effects of dynamic visual cryptography have been introduced.
• Derivations associating pixel measurements, movement parameters, physical screen characteristics, interpretation of visual time-averaged image, have allowed designing new equipment for human vision testing enabling to record the ability of human vision to interpret time-averaged images.
Information provided for the defence: 1. A near-optimal time function realising the enhanced security of
dynamic visual cryptography has been discovered. 2. The credibility method based on time-averaged moiré patterns to test
shaker tables has been created. 3. Dynamic visual cryptography methods have been applied for the
evaluation of optical chaotic oscillations.
7
4. Operating equipment for human vision testing based on dynamic visual cryptography has been designed.
Approval of the results: The experiments were performed at the Institute of Defence Technologies,
at Kaunas University of Technology and at the Ophthalmology Clinics, at the Hospital of Lithuanian University of Health Sciences. The results have been used by carrying out the project “Dynamic Visual Cryptography for Human Vision Studies” by Lithuanian Science Fund. The period of the project is 2012–2014.
The major results of the dissertation were published in 4 publications, 3 of which are published in the Institute for Scientific Information (ISI) as the main list of publications with citing indexes; one was published in the international data base of publications. The topics covered in dissertation were presented at 2 international conferences and 1 national conference. During the exhibition-contest “KTU Technorama 2014”, the paper on “Dynamic Visual Cryptography for Human Vision Studies” was presented and a third place award was received. The article “Dynamic Visual Cryptography for Optical Control of Vibration Generation Equipment” was reviewed in Canadian data base “Advances in Engineering” which introduces the latest science discoveries and news.
The scope and structure of the paper: Doctoral dissertation consists of an introduction, 5 major sections,
conclusions, list of references and list of the author’s publications. The scope of the dissertation is 113 pages. There are 62 illustrations, 6 tables, the list of 88 cited sources within 85 pages of the main part of the dissertation.
1. LITERATURE REVIEW
Visual cryptography is a cryptographic technique which allows visual information to be encrypted in such a way that the decryption can be performed by the human visual system, without the aid of computers. Visual cryptography was pioneered by Naor and Shamir in 1994 [2]. They demonstrated a visual secret sharing scheme, where the secret image was broken up into n shares so that only someone with all n shares could decrypt the image, while any n-1 shares revealed no information about the original image.
Many advances in visual cryptography have been done since 1994. Visual cryptography for colour images has been proposed in [3, 4]. Ideal contrast visual cryptography schemes have been introduced in [5]. A general multi-secret visual cryptography scheme is presented in [6]; incrementing visual cryptography scheme using random grids is described in [7]. A new cheating prevention visual cryptography scheme is discussed in [8].
Geometric moiré [9, 10] is a classical in-plane whole-field non-destructive optical experimental technique based on the analysis of visual patterns produced by superposition of two regular gratings that geometrically interfere. The
8
synthesis process involves production of such two images that the required moiré pattern emerges when those images are superimposed [11].
Body identification tasks based on moiré can be applied in biomedicine as well [12].
An alternative image hiding method based on time-averaging moiré is proposed in [1]. This method is based not on the static superposition of shares (or geometric moiré images), but on time-averaging geometric moiré. This method generates only one picture; the secret image can be interpreted with the naked eye only when the original encoded image is harmonically oscillated in a predefined direction at strictly defined amplitude of oscillation. This dynamic visual cryptography scheme requires a computer to encode a secret, but one can decode the secret without a computing device. Only one picture is generated, and the secret is leaked from this picture when parameters of the oscillation are appropriately tuned. Additional image security measures are implemented in [13] where the secret image is not leaked at any parameters, at any directions of the harmonic oscillation – additional requirements are raised for the time function determining the process of oscillation. Particularly, the secret image can be interpreted with the naked eye in [13] only when the time function describing the oscillation of the encoded image is a triangular waveform (the density function of the time function is a symmetric uniform density function).
The shape of the waveform is optimised in [14] where the criterion of optimality was based on the magnitude of the derivative of the standard at the amplitude corresponding to the formation of the first moiré fringe. The standard is computed as the variation of grayscale levels around the mean grayscale level in the time averaged image while the derivative of the standard in respect to the amplitude of a piece-wise uniform waveform defines the applicable interval of amplitudes for visual decryption of the secret image.
Moiré grating on the surface of a one-dimensional structure in the state of equilibrium can be interpreted as a periodic variation of black and white colours [1]:
+= xxF
λ
π2cos
2
1
2
1)( (1.1)
where x is the longitudinal coordinate; F(x) is grayscale level of the surface at point x; λ is the pitch of the grating. Numerical value 0 of F(x) corresponds to black colour; 1 corresponds to white colour, and all intermediate values – to appropriate grayscale levels. The assumption that the deflection from the state of equilibrium varies harmonically in time:
ξ(t)=s⋅sin(ωt+ϕ),
9
where ω is the cyclic frequency, ϕ is the phase and s is the amplitude of harmonic oscillations. Then, the time averaged grayscale level can be expressed like [15]:
( )( )
+=
=
+−+∫
∞→
sJx
dttsxT
T
T
λ
π
λ
π
ϕωλ
π
22cos
2
1
2
1
sin2
cos2
1
2
11lim
0
0
(1.2)
where T is the exposure time; J0 is the zero order Bessel function of the first
kind. Time-averaged fringes will form when 02
0 =
sJ
λ
π, the canters of
fringes coincide with the locations where the intensity is equal to 0.5. Construction of the envelope function which modulates the grating and
characterizes the formation of fringes is .2
2
1
2
10
± sJ
λ
π
The relationship between the pitch of the grating, the amplitude of harmonic oscillations and the order of a time-averaged fringe takes the following form:
...,2,1;2
== iirisλ
π (1.3)
where r i denotes ith root of the zero order Bessel function of the first kind. That the moiré grating F(x) is a stepped periodic function – the grating is formed as the array of white and dark bands [13]:
( )
( ) ( )( )
( ) ( )
+
++
−∈
++
+∪
+
−∈
=
jb
jb
x
jjb
jb
jx
xF
λλ
λλ
λλλ
λλ
λ
2
1;
2
1 when ,0
1;2
1
2
1; when ,1
(1.4)
where K,2,1,0 ±±=j and the parameter b determines the ratio the widths of
white and black bands in a moiré grating. The Fourier expansion of Eq. (1.4) reads:
∑+∞
=
++=
1
0 2sin
2cos
2)(
kkk
xkb
xka
axF
λ
π
λ
π
(1.5)
where
10
( )( )( ) ( )( )
( )( ) ( )( )....,2,1;
1cos1cos
,1sin1sin
;120
=−−+
=
+−−=−=
kk
bkbkb
k
bkbkaba
k
k
π
ππ
π
ππ
(1.6)
When the function describing the deflection from the state of equilibrium is not a harmonic but a triangular waveform function, then the time averaged grayscale level can be expressed as follows:
( )
++= ∑
∞+
= sk
sk
xkb
xka
aFxH
kkkss
λ
π
λ
π
λ
π
λ
πζ
2
2sin
2sin
2cos
2ˆ;|
1
0 (1.7)
Harmonic oscillations yield:
( )
++= ∑
+∞
=
sk
Jxk
bxk
aa
FxHk
kksλ
π
λ
π
λ
πζ
22sin
2cos
2
~;| 0
1
0 (1.8)
Secret information is formed in the rectangular moiré grating only when it is vibrated by the motion law (e.g. zig-zag), direction, and amplitude.
Significant results have been achieved in human vision studies both in Lithuania and abroad. First of all, Jankauskienė’s extensive works should be mentioned in the field of eye micro movement studies [16]. Significant results in human eye movement studies, as well as tracking of moving objects have been obtained by Laurinaitis group at the Centre of Biomedicine Engineering, at Šiauliai University [17]. At the international level, such scientific journals as Perception, Vision Reseach, Nature, Eye (published by the group) should be mentioned as they mainly focus on different aspects of human vision.
Taking into account works of dynamic visual cryptography and human vision studies, it has been decided that it is important to continue the researches and realise them experimentally, use for the identification of system parameters and control. In this dissertation, the optimal time function has been found that allows ensuring optimal security of encoded image. It has been shown that the optical effects of dynamic visual cryptography can be realised by using experimental measures based on the devices generating oscillations and control techniques. The possibilities for chaotic dynamic cryptography have been analysed. Having employed optical effects, on the screens of digital computers, functioning equipment based on dynamic visual cryptography has been designed enabling to evaluate the functionality of human vision system.
11
2. NEAR-OPTIMAL TIME FUNCTION FOR SECURE DYNAMIC VISUAL CRYPTOGRAPHY
The strategy for the selection of an optimal time function for dynamic visual cryptography is presented in this section. Evolutionary algorithms are used to obtain the symmetric piece-wise uniform density function. The fitness function of each chromosome is associated with the derivative of the standard of the time-averaged moiré image. The reconstructed near-optimal time function represents the smallest interval of amplitudes where an interpretable moiré pattern is generated in the time-averaged image. Such time functions can be effectively exploited in computational implementation of secure dynamic visual cryptography.
A stepped grayscale function (Eq. 1.4) is considered in this section. We will consider a piece-linear function ξs(t) (a function describing dynamic deflection from state of equilibrium) as a realisation of ξs; its which density function ps(x) satisfies following requirements:
a) ( ) 0 ; when 0 >>= ssxxps ;
b) ( ) ( )xpxp ss −= for all R∈x .
We will assume that the density function ps(x) comprises 2n equispaced columns symmetrically distributed in the interval [−s; s] (Fig. 2.1). Due to the symmetry we will consider the vector (γ1, γ2,...,γn) representing the right half of the density function γi denotes the area of the i-th column).
Fig. 2.1. A piece-wise uniform density function comprising 2n equispaced columns. The density is described by the weight-vector ((γ1, γ2,...,γn); γi is the area of the i-th column
The following problem of combinatorial optimization is considered: find a vector (γ1, γ2,...,γn) maximizing the target function:

12
( )
( )
⋅+
′⋅
⋅+
=
=′
∑
∑
∞
=
∞
=
λ
π
λ
π
λ
π
λσ
kPba
kP
kPba
s
sk
kk
ssk
kk
2
22
2
2
22
1
22
1
22
(2.1)
with the following constraints ∑=
=
n
ii
1 2
1γ ir 0>iγ , ni ,,2,1 K= in force.
In order to reduce the computational costs of the problem, an integer programming problem is analysed instead: integer values of γ1, γ2,...,γn are sought
and then they are normalised with respect to ∑=
n
ii
1
2 γ . The sum H = γ1+γ2+...+γn is
fixed (following the properties of the density function) what yields
( )
( )max,
2
22
2
2
22
1
22
1
22
→
⋅+
′⋅
⋅+
=
=′
∑
∑
∞
=
∞
=
λ
π
λ
π
λ
π
λσ
kPba
kP
kPba
s
sk
kk
ssk
kk
(2.2)
at Hn
ii =∑
=1
γ ; (2.3)
0>iγ , ni ,,2,1 K= . (2.4)
where γi, ni ,,2,1 K= ; H∈N. It can be noted that the quantity of vectors (γ1, γ2,...,γn), satisfying 2.3 and
2.4 constrains is equal to ( )( ) 2/21 +−+−= nHnHNγ
.
Evolutionary algorithms for solving the problem 2.2 – 2.4 will be used. Every chromosome represents a vector (γ1, γ2,...,γn). The length of each chromosome is 12 and the sum H = 60, i.e. a gene is the integer between 1 and 49. The width of the columns is fixed, thus the magnitude of a gene is proportional to the height of a corresponding column. The fitness of the chromosome is estimated by ( )2/λσ =′ s .
The initial population comprises N randomly generated chromosomes. Each chromosome in the initial population was generated in such way that 2.3 and 2.4 requirements hold true. All chromosomes (γ1, γ2,...,γn) lie on hyperplane, described by equation 2.3 and inequalities 2.4. The procedure of generation of the chromosomes is following:
- generate an integer γ1 distributed uniformly over the interval [1; H − n + 1]; - generate an integer γ2 distributed uniformly over [1; H − n + 1 - γ1];

13
- ...
- generate γn-1 distributed uniformly over
−+− ∑−
=
2
1
1;1n
iinH γ ;
- calculate the gene .11
1∑−
=
−+−=
n
iin nH γγ
Replications are allowed in the initial population. Therefore chromosomes (γ1, γ2,...,γn) are distributed uniformly over the hyperplane, described by eq. 2.2 and eq. 2.4 and the probability for all chromosomes to be selected into the initial
population is uniform and equals to ( )!1
11
2
11
1
1
+−
=⋅⋅⋅
−
⋅
+− nHnHnHK
The fitness of each chromosome is evaluated and an even number of chromosomes is selected to the mating population (the size of the mating population is equal to the size of initial population). A random roulette method for the selection of chromosomes is used; the chance that a chromosome will be selected is proportional to its fitness value. All chromosomes are paired randomly when process of mating is over.
The crossover between two chromosomes is executed for all pairs in the mating population. A one-point crossover method is used and the location of this point is random. A crossover coefficient κ is introduced, which characterises a probability that the crossover procedure will be executed for a pair of chromosomes. If a chromosome violates condition 13 after crossover, a norming procedure is applied:
( )
⋅
⋅
⋅=′′′
∑∑∑===
n
ii
n
n
ii
n
ii
n
HHH
11
2
1
121 round,,round,round,,,
γ
γ
γ
γ
γ
γγγγ KK
(2.5)
If the new chromosome ( )nγγγ ′′′ ,,, 21 K violates condition 2.4, it is rounded
to the nearest (H − n + 1) - digit number from n columns. In order to avoid the convergence to one local solution, a mutation
procedure is used. The mutation parameter µ (0<µ<1) determines the probability for a chromosome to mutate. The quantity of round (µ · N) chromosomes is randomly selected to expose to the mutation and one gene of each chromosome is changed by adding a random number distributed uniformly over the interval [1; H − n + 1]. The norming procedure is applied for the mutated chromosomes.
The following parameters of the evolutionary algorithms must be pre-selected: the crossover coefficient κ, the mutation parameter µ and the size of the population N.
In order to tune the parameters κ and µ, an artificial problem is constructed: a best density function comprising 6 columns is sought (the length
14
of a chromosome is 3 and H = 15). The optimal (full sorting) solution for this problem is the vector (1;1;13) and its fitness equals to
.18816565067223,02
=
=′λ
σ ss Now evolutionary algorithms are
commenced for the same problem; the population size is set to N = 20, what correspond to N=20, what correspond to
( )( )%99.22
182
40
23151315
220≈=
+−+−
⋅=
γN
Nof all chromosomes.
The parameters κ and µ are selected according to the frequency of optimal solution (1; 1; 13) in the population and according to the mean value of the fitness function. Three independent trials of evolutionary algorithms containing 5 generations were executed.
The number of successful trials and the mean value of the fitness function of the population is highest at κ = 0.6 and µ = 0.05. Thus these parameter values of the evolutionary algorithm are fixed and a piece-wise uniform density function comprising 24 columns with H = 60 is sought (it is unrealistic to solve such a problem using brute-force full sorting strategies). The number of possible
solutions is ( )( )
.12252
2126011260=
+−+−
=γ
N The size of the population is
N=300 which comprises %49.241225
300≈=
γN
N of all chromosomes. The number
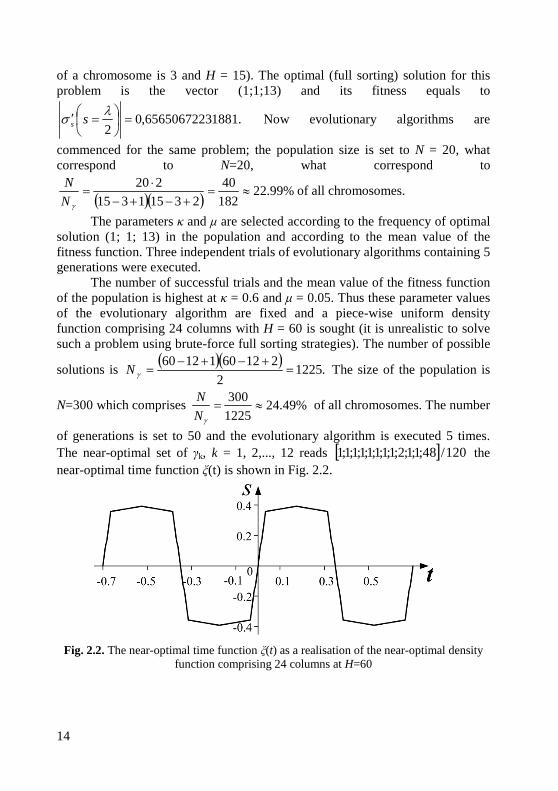
of generations is set to 50 and the evolutionary algorithm is executed 5 times. The near-optimal set of γk, k = 1, 2,..., 12 reads [ ] 120/48;1;1;2;1;1;1;1;1;1;1;1 the near-optimal time function ξ(t) is shown in Fig. 2.2.
Fig. 2.2. The near-optimal time function ξ(t) as a realisation of the near-optimal density function comprising 24 columns at H=60
15
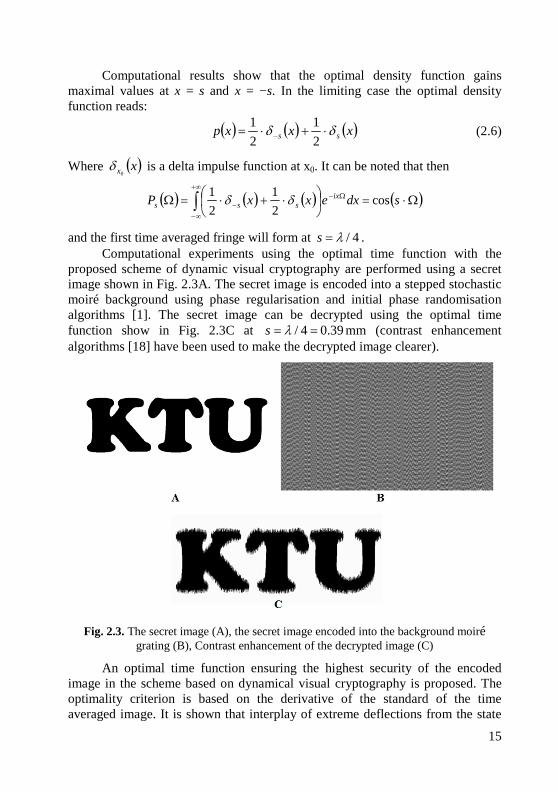
Computational results show that the optimal density function gains maximal values at x = s and x = −s. In the limiting case the optimal density function reads:
( ) ( ) ( )xxxp ss δδ ⋅+⋅=
− 2
1
2
1 (2.6)
Where ( )xx0δ is a delta impulse function at x0. It can be noted that then
( ) ( ) ( ) ( )∫
+∞
∞−
Ω−
−Ω⋅=
⋅+⋅=Ω sdxexxP ix
sss cos2
1
2
1δδ
and the first time averaged fringe will form at 4/λ=s . Computational experiments using the optimal time function with the
proposed scheme of dynamic visual cryptography are performed using a secret image shown in Fig. 2.3A. The secret image is encoded into a stepped stochastic moiré background using phase regularisation and initial phase randomisation algorithms [1]. The secret image can be decrypted using the optimal time function show in Fig. 2.3C at 39.04/ == λs mm (contrast enhancement algorithms [18] have been used to make the decrypted image clearer).
Fig. 2.3. The secret image (A), the secret image encoded into the background moiré grating (B), Contrast enhancement of the decrypted image (C)
An optimal time function ensuring the highest security of the encoded image in the scheme based on dynamical visual cryptography is proposed. The optimality criterion is based on the derivative of the standard of the time averaged image. It is shown that interplay of extreme deflections from the state
16
of equilibrium can be considered as a near-optimal realisation of the decoding phase and can be effectively exploited in computational implementation of secure dynamic visual cryptography.
3. DYNAMIC VISUAL CRYPTOGRAPHY FOR OPTICAL CONTROL OF VIBRATION GENERATION EQUIPMENT
An optical experimental technique based on dynamic visual cryptography is proposed in the third section for the optical control of vibration generation equipment. A secret image is embedded into a stochastic background using initial stochastic phase deflection and phase matching algorithms. The embedded image can be interpreted with the naked eye when the structure vibrates in the pre-determined mode; the decoding of the image is based on the formation of moiré fringes in the time-averaged image. A simple visual inspection is enough to determine if the amplitude of vibrations is kept in the tolerated range.
Moiré grating on the surface of a one-dimensional structure in the state of equilibrium is describes by equation (1.1).
Time-average geometric moiré is an optical experimental method when the moiré grating is formed on the surface of an oscillating structure and time averaging techniques are used for the registration of time averaged patterns of fringes [19]. The assumption that the deflection from the state of equilibrium varies harmonically in time:
( ) ( )ϕω += tstu sin (3.1)
In this case, the one-dimensional time-averaged image is described according to the formula (1.2).
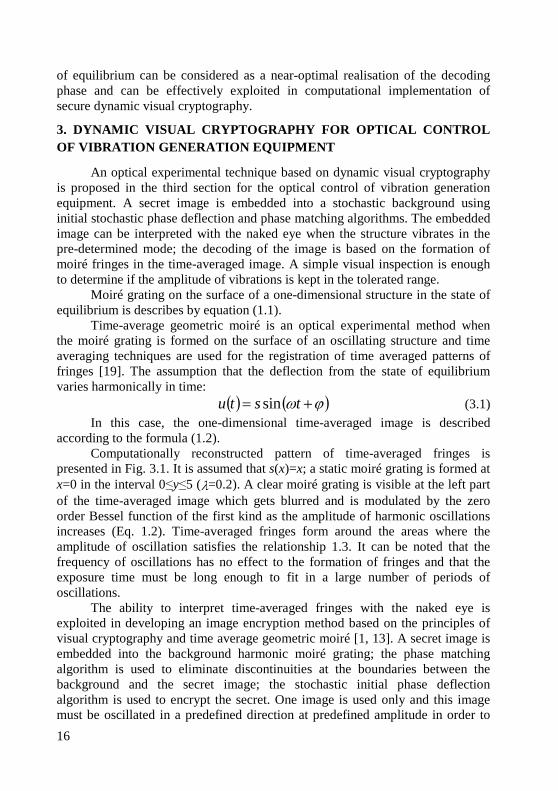
Computationally reconstructed pattern of time-averaged fringes is presented in Fig. 3.1. It is assumed that s(x)=x; a static moiré grating is formed at x=0 in the interval 0≤y≤5 (λ=0.2). A clear moiré grating is visible at the left part of the time-averaged image which gets blurred and is modulated by the zero order Bessel function of the first kind as the amplitude of harmonic oscillations increases (Eq. 1.2). Time-averaged fringes form around the areas where the amplitude of oscillation satisfies the relationship 1.3. It can be noted that the frequency of oscillations has no effect to the formation of fringes and that the exposure time must be long enough to fit in a large number of periods of oscillations.
The ability to interpret time-averaged fringes with the naked eye is exploited in developing an image encryption method based on the principles of visual cryptography and time average geometric moiré [1, 13]. A secret image is embedded into the background harmonic moiré grating; the phase matching algorithm is used to eliminate discontinuities at the boundaries between the background and the secret image; the stochastic initial phase deflection algorithm is used to encrypt the secret. One image is used only and this image must be oscillated in a predefined direction at predefined amplitude in order to
17
produce time-averaged moiré fringes induced by the motion blur. It is important that the direction of harmonic oscillations used to decode the secret must coincide with the direction perpendicular to the constitutive moiré grating lines used to encode the secret. Theoretically, the time of exposure should tend to infinity. In practice, it is enough that a large number of periods of oscillation would fit into the time of exposure.
Fig. 3.1. . Computationally reconstructed pattern of time-averaged fringes (A); the modulating zero order Bessel function of the first kind (B) and the standard deviation of
the grayscale level in the time-averaged image (C)
The image can be fixed onto the surface of a solid non-deformable body which performs periodic oscillations. The experimental setup used for the implementation of this visualisation technique comprises a shaker table and an ordinary optical camera (Fig. 3.2).
Fig. 3.2. The general view of the experimental setup
18
The encoded image is printed by an ordinary digital printer and glued onto the surface of a rigid structure which is fixed to the head of the shaker table. It is important to check that this rigid structure (and the fixture in whole) would not possess structural resonances at the pre-determined range of excitation frequencies: the visual decoding procedure is based on in-plane periodic oscillations. The frequency must be high enough if the decoding is visual and performed with the naked eye. On the other hand, the exposure time must be long enough to accommodate a sufficient number of periods of oscillations if the time-averaged image is to be acquired by a photographic camera. The error introduced by a finite exposure time diminishes within a range of few percents as T becomes longer than 10 periods of harmonic oscillation.
We select the frequency of oscillations 60 Hz, and the time of exposure T=1/15 s. Thus, around 4 periods of oscillations fit into the time of exposure. If some fractional part of the period is cut out at the beginning or at the end of the exposure interval, that has a small effect to the process of time averaging.
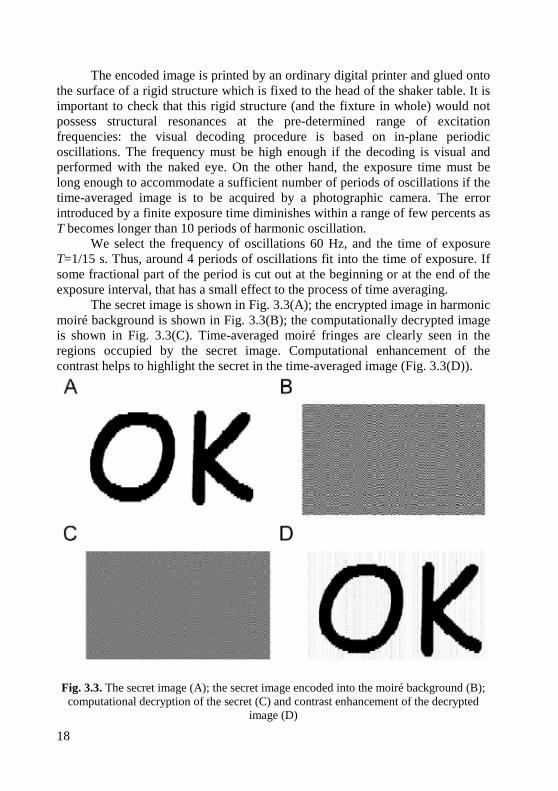
The secret image is shown in Fig. 3.3(A); the encrypted image in harmonic moiré background is shown in Fig. 3.3(B); the computationally decrypted image is shown in Fig. 3.3(C). Time-averaged moiré fringes are clearly seen in the regions occupied by the secret image. Computational enhancement of the contrast helps to highlight the secret in the time-averaged image (Fig. 3.3(D)).
Fig. 3.3. The secret image (A); the secret image encoded into the moiré background (B); computational decryption of the secret (C) and contrast enhancement of the decrypted
image (D)
19
The sensitivity of the proposed method is determined by pitches of moiré gratings used to represent the background and the secret image. The pitch at the background is
0λ and the pitch at the region inherent to the secret image is
1λ.
The highest possible resolution of the proposed technique (in the amplitude domain) could be achieved when
1λ is almost equal to
0λ, but such extremes
will not be considered because the optical interpretation of the secret image would become problematic then. Instead, one shall consider the opposite situation when
1λ is located as far as possible from
0λ and its recurrent values
(contrast differences of the background and the secret image are highest then). The proposed technique is based on the principle of visual cryptography.
In other words, one must accurately tune the amplitude of oscillations in order to decrypt the secret (undeveloped time-averaged fringes prevent visual decryption). The secret image is interpretable if the standard deviation is not higher than 0.01 (a dashed line in Fig. 3.1(C)). Then, regions of amplitudes ensuring visual decryption of the secret are marked as thick solid intervals on the a-axis in Fig. 3.1(C). The width of the interval around the first root of the zero order Bessel function of the first kind is about 10 times smaller than ∆s (Fig. 3.1(C)). The proposed optical control technique can discriminate a change of the amplitude of oscillations larger than 0.05 mm. Note that this can be achieved using an ordinary digital printer without special printing surface preparation techniques.
Two different waveforms have been investigated in this section – harmonic and triangular waveforms. The basic idea of the proposed optical control technique is based on the fact that sophisticated computational tools are required to encode the secret image, but the decoding process is completely visual. In other words, the decoding process is based on the inability of human visual system to track fast moving objects.
A simple optical control technique for the control of vibrating equipment is proposed in this section. Such a control technique can be advantageous in particular industrial or technological environments (a laboratory shaker table for precise mixing of fluid suspensions could be a typical example).
4. DYNAMIC VISUAL CRYPTOGRAPHY BASED ON CHAOTIC OSCILLATIONS
The main objective of this section is to investigate the feasibility of chaotic dynamic visual cryptography where the time function determining the deflection of the encoded image from the state of equilibrium is a Gaussian process with zero mean and pre-determined variance.
One-dimensional harmonic moiré grating (Eq. 1.1) has been analysed. A periodic moiré grating can be expanded into the Fourier series according to (Eq. 1.5). It is shown in [15] that the Fourier transform of the Gaussian density
20
function representing stochastic oscillations around the state of equilibrium reads:
−=
λ
σπ
λ
π
σ
kkP
2
2
1exp
2
(4.1)
where σ is the standard deviation of the Gaussian process. The envelope function characterising the decay of the contrast of the time-
averaged moiré grating blurred by chaotic oscillations reads:
( )
−±=
λ
πσσ
2
2
1exp
2
1
2
1~P (4.1)
note that no time-averaged fringes are formed by chaotic oscillations: the moiré grating is monotonically blurred as the standard deviation σ is increased (4.1 fig.). Actually, the sharp image of the static harmonic moiré grating is produced at σ = 0:
( )
+=
=
xxHλ
π
σ
2cos
2
1
2
10
(4.3)
And the time-averaged image is completely blurred out as σ→∞
( )
2
1=
∞→σxH (4.4)
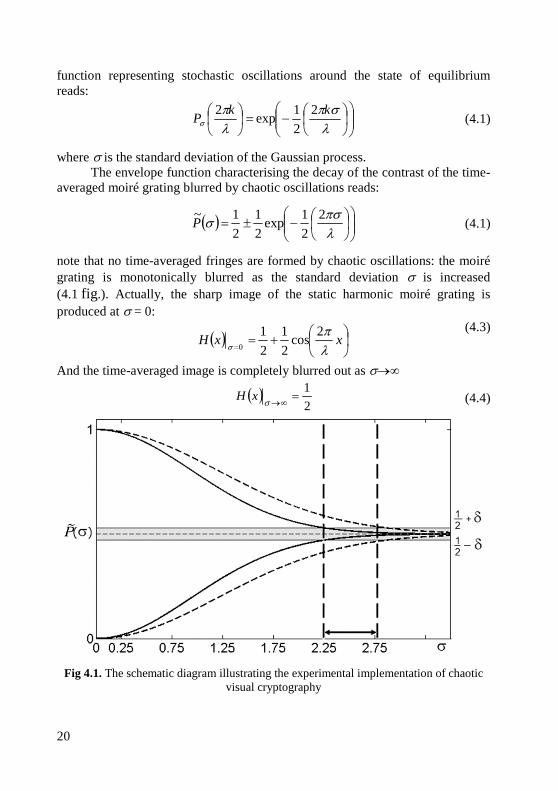
Fig 4.1. The schematic diagram illustrating the experimental implementation of chaotic visual cryptography
21
The law of motion ξ(t) is now assumed to be a Gaussian process (since we consider chaotic oscillations). The decay of the modulating envelope function
)(~σP at λ0 = 22ε = 5.94 mm and λ1 = 20ε = 5.4 mm is illustrated in Fig. 4.1 by
thin solid lines and thin dashed lines accordingly (ε is the size of the pixel and is equal to 0.27 mm). The horizontal dashed line is located at 0.5 and denotes the centre of a time-averaged moiré fringe e (time-averaged fringes become fully developed at σ→∞). A 2δ-width band around 0.5 is marked by a light grey colour in Fig. 4.1; here δ stands for the blur level which is interpreted as a fully developed fringe by a human visual system. In other words, the σ-region between two thick vertical lines (Fig. 4.1) is applicable for visual cryptography based on chaotic oscillations. The time averaged image of the moiré grating with λ0-pitch will be interpreted as an interference fringe, and the moiré grating with λ1-pitch will not be interpreted as an interference fringe in that range of σ.
In that respect, the way how the secret image is leaked by chaotic dynamic visual cryptography is different from dynamic visual cryptography based on periodic oscillations. Periodic oscillations can be used to leak the secret from the cover image in two different modes. But chaotic dynamic cryptography does not allow such “flipping” of the time-averaged image. If the pitch of the moiré grating is higher for the secret than for the background image, then time-averaged fringes could form only in the background. If time-averaged fringes formed in the region occupied by the secret, they would also necessarily form in the background (Fig. 4.1) and visual decryption of the secret image would be impossible.
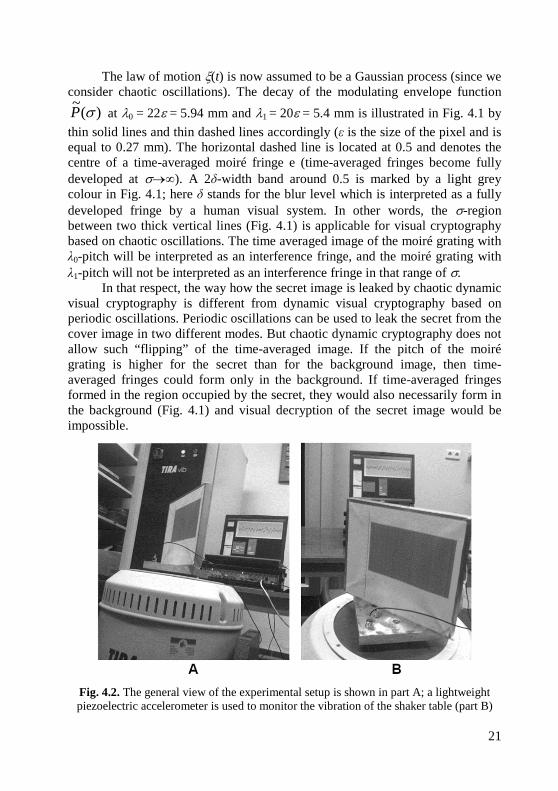
Fig. 4.2. The general view of the experimental setup is shown in part A; a lightweight piezoelectric accelerometer is used to monitor the vibration of the shaker table (part B)
22
Chaotic visual cryptography (as any visual cryptography scheme) requires special digital algorithms to encode the secret image. However, the decoding process is a completely visual procedure which does not require a computer. The encoded cover image can be fixed onto the surface of a structure which performs chaotic oscillations.
The experimental setup for the implementation of this decoding technique does comprise two basic elements: a shaker table and an ordinary optical camera (Fif. 4.2). The encoded image is printed using an ordinary digital printer and is glued onto the surface of a rigid structure which is fixed to the head of the shaker table.
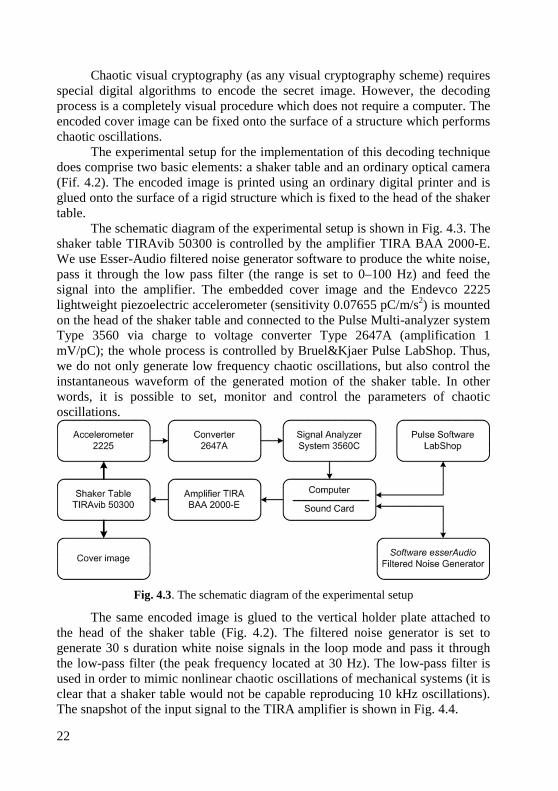
The schematic diagram of the experimental setup is shown in Fig. 4.3. The shaker table TIRAvib 50300 is controlled by the amplifier TIRA BAA 2000-E. We use Esser-Audio filtered noise generator software to produce the white noise, pass it through the low pass filter (the range is set to 0–100 Hz) and feed the signal into the amplifier. The embedded cover image and the Endevco 2225 lightweight piezoelectric accelerometer (sensitivity 0.07655 pC/m/s2) is mounted on the head of the shaker table and connected to the Pulse Multi-analyzer system Type 3560 via charge to voltage converter Type 2647A (amplification 1 mV/pC); the whole process is controlled by Bruel&Kjaer Pulse LabShop. Thus, we do not only generate low frequency chaotic oscillations, but also control the instantaneous waveform of the generated motion of the shaker table. In other words, it is possible to set, monitor and control the parameters of chaotic oscillations.
Fig. 4.3. The schematic diagram of the experimental setup
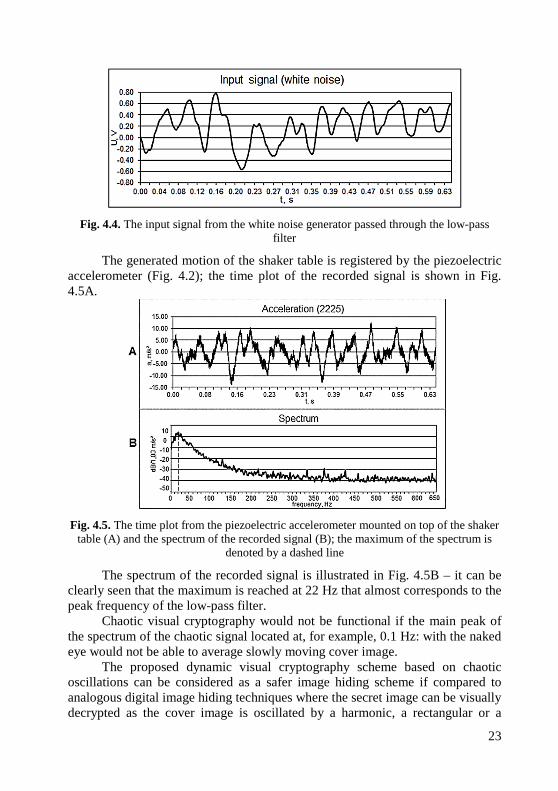
The same encoded image is glued to the vertical holder plate attached to the head of the shaker table (Fig. 4.2). The filtered noise generator is set to generate 30 s duration white noise signals in the loop mode and pass it through the low-pass filter (the peak frequency located at 30 Hz). The low-pass filter is used in order to mimic nonlinear chaotic oscillations of mechanical systems (it is clear that a shaker table would not be capable reproducing 10 kHz oscillations). The snapshot of the input signal to the TIRA amplifier is shown in Fig. 4.4.
23
Fig. 4.4. The input signal from the white noise generator passed through the low-pass filter
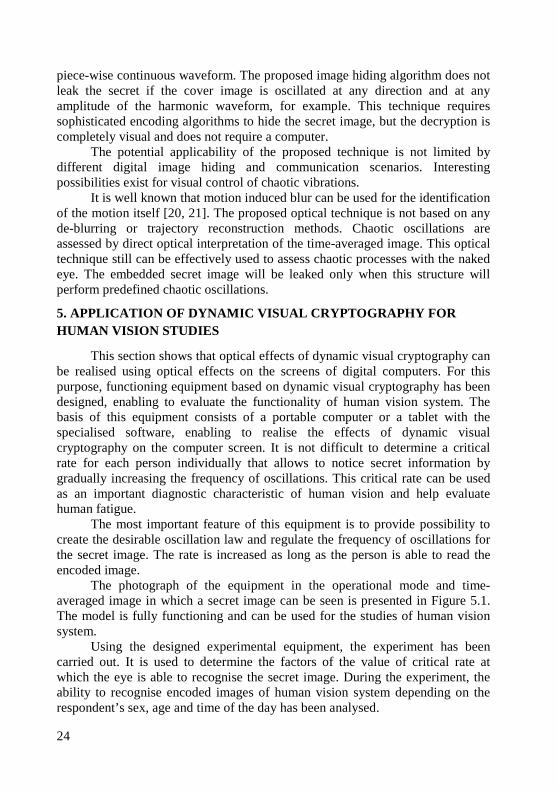
The generated motion of the shaker table is registered by the piezoelectric accelerometer (Fig. 4.2); the time plot of the recorded signal is shown in Fig. 4.5A.
Fig. 4.5. The time plot from the piezoelectric accelerometer mounted on top of the shaker table (A) and the spectrum of the recorded signal (B); the maximum of the spectrum is
denoted by a dashed line
The spectrum of the recorded signal is illustrated in Fig. 4.5B – it can be clearly seen that the maximum is reached at 22 Hz that almost corresponds to the peak frequency of the low-pass filter.
Chaotic visual cryptography would not be functional if the main peak of the spectrum of the chaotic signal located at, for example, 0.1 Hz: with the naked eye would not be able to average slowly moving cover image.
The proposed dynamic visual cryptography scheme based on chaotic oscillations can be considered as a safer image hiding scheme if compared to analogous digital image hiding techniques where the secret image can be visually decrypted as the cover image is oscillated by a harmonic, a rectangular or a
24
piece-wise continuous waveform. The proposed image hiding algorithm does not leak the secret if the cover image is oscillated at any direction and at any amplitude of the harmonic waveform, for example. This technique requires sophisticated encoding algorithms to hide the secret image, but the decryption is completely visual and does not require a computer.
The potential applicability of the proposed technique is not limited by different digital image hiding and communication scenarios. Interesting possibilities exist for visual control of chaotic vibrations.
It is well known that motion induced blur can be used for the identification of the motion itself [20, 21]. The proposed optical technique is not based on any de-blurring or trajectory reconstruction methods. Chaotic oscillations are assessed by direct optical interpretation of the time-averaged image. This optical technique still can be effectively used to assess chaotic processes with the naked eye. The embedded secret image will be leaked only when this structure will perform predefined chaotic oscillations.
5. APPLICATION OF DYNAMIC VISUAL CRYPTOGRAPHY FOR HUMAN VISION STUDIES
This section shows that optical effects of dynamic visual cryptography can be realised using optical effects on the screens of digital computers. For this purpose, functioning equipment based on dynamic visual cryptography has been designed, enabling to evaluate the functionality of human vision system. The basis of this equipment consists of a portable computer or a tablet with the specialised software, enabling to realise the effects of dynamic visual cryptography on the computer screen. It is not difficult to determine a critical rate for each person individually that allows to notice secret information by gradually increasing the frequency of oscillations. This critical rate can be used as an important diagnostic characteristic of human vision and help evaluate human fatigue.
The most important feature of this equipment is to provide possibility to create the desirable oscillation law and regulate the frequency of oscillations for the secret image. The rate is increased as long as the person is able to read the encoded image.
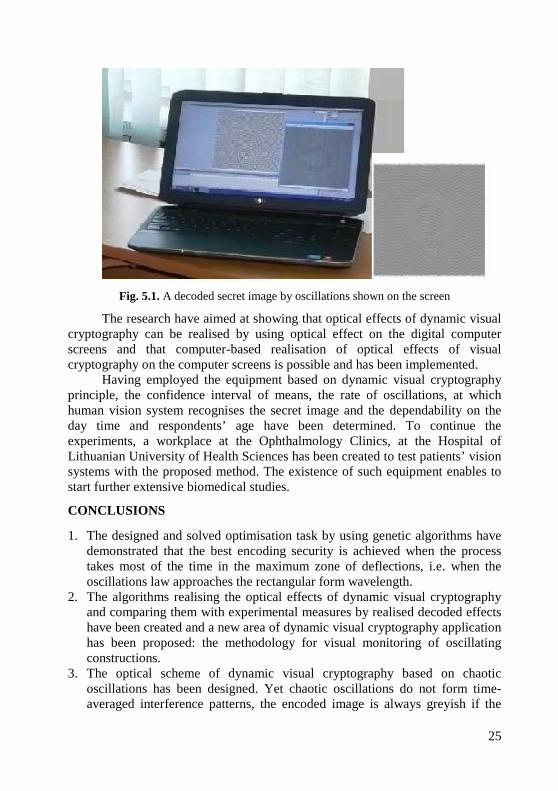
The photograph of the equipment in the operational mode and time-averaged image in which a secret image can be seen is presented in Figure 5.1. The model is fully functioning and can be used for the studies of human vision system.
Using the designed experimental equipment, the experiment has been carried out. It is used to determine the factors of the value of critical rate at which the eye is able to recognise the secret image. During the experiment, the ability to recognise encoded images of human vision system depending on the respondent’s sex, age and time of the day has been analysed.
25
Fig. 5.1. A decoded secret image by oscillations shown on the screen
The research have aimed at showing that optical effects of dynamic visual cryptography can be realised by using optical effect on the digital computer screens and that computer-based realisation of optical effects of visual cryptography on the computer screens is possible and has been implemented.
Having employed the equipment based on dynamic visual cryptography principle, the confidence interval of means, the rate of oscillations, at which human vision system recognises the secret image and the dependability on the day time and respondents’ age have been determined. To continue the experiments, a workplace at the Ophthalmology Clinics, at the Hospital of Lithuanian University of Health Sciences has been created to test patients’ vision systems with the proposed method. The existence of such equipment enables to start further extensive biomedical studies.
CONCLUSIONS
1. The designed and solved optimisation task by using genetic algorithms have demonstrated that the best encoding security is achieved when the process takes most of the time in the maximum zone of deflections, i.e. when the oscillations law approaches the rectangular form wavelength.
2. The algorithms realising the optical effects of dynamic visual cryptography and comparing them with experimental measures by realised decoded effects have been created and a new area of dynamic visual cryptography application has been proposed: the methodology for visual monitoring of oscillating constructions.
3. The optical scheme of dynamic visual cryptography based on chaotic oscillations has been designed. Yet chaotic oscillations do not form time-averaged interference patterns, the encoded image is always greyish if the
26
intensity of chaotic oscillations is increased, but the grey index is sensitive to encoded image moiré image grating step. This effect conditions that the secret image will be seen when the parameters of chaotic oscillations occur in the acceptable value interval determined in advance.
4. Having established the theoretical relations relating pixel measurements, motion parameters, physical characteristics of the screen and visual interpretation of formatting time-averaged image, it has been found out that the optical effects of dynamic visual cryptography can be realised on the digital computer screens.
5. Operating equipment for human vision studies based on dynamic visual cryptography has been designed. The most important feature of the equipment is to provide with possibility to create the desirable oscillation law and regulate the frequency of oscillations for the secret image when it moves according to the intended law. The rate is increased as long as the patient is able to read the encoded image.
6. Having carried out the statistical analysis, it has been observed that average frequency of oscillations at which a human eye is able to identify a secret image ranging from 11.78 to 13.05 Hz. It may be assumed that its value depends on the human fatigue. The less human experiences the fatigue, the image will be visible at the lower frequency of oscillations, although it depends on the particular physiological features of the human (e.g. eye diseases).
REFERENCES
1. M. Ragulskis and A. Aleksa, Image hiding based on time-averaging moiré, Opt. Commun., vol. 282, no. 14, pp. 2752–2759, 2009.
2. Shamir A. and Naor M., Visual cryptography, Lect. Notes Comput. Sci., vol. 950, pp. 1–12, 1994.
3. Y.-C. Hou, Visual cryptography for color images, Pattern Recognit., vol. 36, no. 7, pp. 1619–1629, 2003.
4. S. Cimato, R. De Prisco, and A. De Santis, Colored visual cryptography without color darkening, Theor. Comput. Sci., vol. 374, no. 1–3, pp. 261–276, 2007.
5. S. Cimato, A. De Santis, A. L. Ferrara, and B. Masucci, Ideal contrast visual cryptography schemes with reversing, Inf. Process. Lett., vol. 93, no. 4, pp. 199–206, 2005.
6. C.-N. Yang and T.-H. Chung, A general multi-secret visual cryptography scheme, Opt. Commun., vol. 283, no. 24, pp. 4949–4962, 2010.
7. R.-Z. Wang, Y.-C. Lan, Y.-K. Lee, S.-Y. Huang, S.-J. Shyu, and T.-L. Chia, Incrementing visual cryptography using random grids, Opt. Commun., vol. 283, no. 21, pp. 4242–4249, 2010.
27
8. Y.-C. Chen, D.-S. Tsai, and G. Horng, A new authentication based cheating prevention scheme in Naor–Shamir’s visual cryptography, J. Vis. Commun. Image Represent., vol. 23, no. 8, pp. 1225–1233, 2012.
9. Kobayashi A.S., Handbook on Experimental Mechanics., 2nd Edition. SEM Bethel, CT, 1993.
10. Patorski K. and Kujawinska M., Handbook of the Moiré Fringe Technique. Amsterdam: Elsevier, 1993.
11. Y. Desmedt and T. van Le, Moiré cryptography, presented at the Seventh ACM Conference on Computer and Communications Security, 2000, pp. 116–124.
12. P. F. Gomes, M. Sesselmann, C. D. C. M. Faria, P. A. Araújo, and L. F. Teixeira-Salmela, Measurement of scapular kinematics with the moiré fringe projection technique, J. Biomech., vol. 43, no. 6, pp. 1215–1219, 2010.
13. M. Ragulskis, A. Aleksa, and Z. Navickas, Image hiding based on time-averaged fringes produced by non-harmonic oscillations, J. Opt. Pure Appl. Opt., vol. 11, no. 12, p. 125411, 2009.
14. E. Sakyte, R. Palivonaite, A. Aleksa, and M. Ragulskis, Image hiding based on near-optimal moiré gratings, Opt. Commun., vol. 284, no. 16–17, pp. 3954–3964, 2011.
15. M. Ragulskis, L. Saunoriene, and R. Maskeliunas, The structure of moire grating lines and its influence to time-averaged fringes, Exp. Tech., vol. 33, no. 2, pp. 60–64, 2009.
16. Jankauskiene, Investigation of eye micromovements in patients with Graves’ ophthalmopathy, in VISION RESEARCH, vol. 36, THE BOULEVARD, LANGFORD LANE, KIDLINGTON, OXFORD, ENGLAND OX5 1GB: PERGAMON-ELSEVIER SCIENCE LTD, 1996, pp. 350–350.
17. Laurutis, V, (paskutinis), Daunys, G, and Zemblys, R, Quantitative Analysis of Catch-up Saccades Executed during Two-dimensional Smooth Pursuit, Electron. Electr. Eng., no. 98, 2010.
18. Ragulskis M. and Navickas Z., Hash functions construction based on time average moire, Discrete Contin. Dyn. Syst.-Ser. B, vol. 8, no. 4, pp. 1007–1020, 2007.
19. C. Y. Liang, Y. Y. Hung, A. J. Durelli, and J. D. Hovanesian, Time-averaged moire method for in-plane vibrational analysis, J. Sound Vib., vol. 62, no. 2, pp. 267–275, 1979.
20. X. Ting-Fa and Z. Peng, Object’s translational speed measurement using motion blur information, Measurement, vol. 43, no. 9, pp. 1173–1179, 2010.
21. X. Deng, Y. Shen, M. Song, D. Tao, J. Bu, and C. Chen, Video-based non-uniform object motion blur estimation and deblurring, Neurocomputing, vol. 86, pp. 170–178, 2012.
28
LIST OF SCIETIFIC PUBLICATIONS ON THE THEME OF THE DISSERTATION
Papers in Master List Journals of the Institute of Scientific Information (ISI)
1. Petrauskienė V.; Aleksa A.; Fedaravičius A.; Ragulskis M. Dynamic visual cryptography for optical control of vibration generation equipment // Optics and Lasers in Engineering. Oxford: Elsevier Ltd. ISSN 0143-8166. 2012, vol. 50, Issues 6, p. 869-876. [ISI Web of Science].
2. Petrauskienė V.; Palivonaitė R.; Aleksa A.; Ragulskis M. Dynamic visual cryptography based on chaotic oscillations // Communications in Nonlinear Science and Numerical Simulation. Amsterdam : Elsevier Science. ISSN 1007-5704. 2014, vol. 19, Issues 1, p. 112-120. [Science Citation Index Expanded (Web of Science)].
3. Petrauskienė V.; Survila A.; Fedaravičius A.; Ragulskis M. Dynamic visual cryptography for optical assessment of chaotic oscillations // Optics and Laser Technology. Oxford : Elsevier. ISSN 0030-3992. 2014, vol. 57, p. 129-135. [Science Citation Index Expanded (Web of Science)].
Articles in other scientific publications:
1. Petrauskienė V.; Ragulskienė J.; Šakytė E.; Ragulskis M. Near-optimal time function for secure dynamic visual cryptography // Advances in Visual Computing : 7th International Symposium, ISVC 2011, September 26-28, 2011, Las Vegas, USA: proceedings. Part 2. Heidelberg, Dordrecht, London, New York: Springer, 2011. (Lecture Notes in Computer Science, vol. 6939, ISSN 0302-9743). ISBN 9783642240270. p. 300-309. [SpringerLINK].
Demonstration Project:
1. Aleksa A.; Petrauskienė V.; Ragulskis M. Stochastic Time-Averaged Moiré Fringes. WOLFRAM Demonstration Project. http://demonstrations.wolfram.com/StochasticTimeAveragedMoireFringes/
INFORMATION ABOUT THE AUTHOR
Personal Information: Date of Birth: March 7, 1975. Place of Birth: Panevėžys. Education: 1993 – 1997 Bachelor in Science of Applied mathematics, Faculty of Fundamental Science, Kaunas University of Technology. 1997 – 1999 Master in Science of Applied mathematics, Faculty of Fundamental Science, Kaunas University of Technology.
29
2010 – 2014 Doctoral studies in Technological Sciences (Mechanical Engineering 09T), Department of Mathematical Modelling, Faculty of Mathematics and Natural Sciences. Teaching experience: Since 2003 Assistant (later Lecturer), Department of Mathematical Modelling, Faculty of Mathematics and Natural Sciences, Kaunas University of Technology. E-mail: [email protected]
REZIUM Ė
Tyrim ų objektas – laike vidurkintų muaro metodų optinės eksperimentinės realizacijos, skirtos dinaminės vizualinės kriptografijos taikymams.
Darbo tikslas – sukurti ir eksperimentiškai realizuoti dinaminės vizualinės kriptografijos koncepciją pagrįstą netiesinių sistemų virpesiais.
Suformuluotam tikslui pasiekti darbe yra sprendžiami uždaviniai: 1. Atlikti teorinius tyrimus, ieškant būdų dinaminės vizualinės
kriptografijos saugumui padidinti panaudojant netiesinių sistemų virpesius.
2. Suformuluoti tikslo funkciją optimalios dekodavimo trajektorijos nustatymui, suformuluotam optimizavimo uždaviniui spręsti panaudoti genetinius algoritmus.
3. Sukonstruoti atitinkamas vibracijų generavimo ir valdymo bei optines priemones padidinto saugumo vizualinės kriptografijos eksperimentinei realizacijai.
4. Ištirti ir eksperimentiškai patikrinti galimybę dinaminės vizualinės kriptografijos efektus realizuoti panaudojant chaotinius virpesius.
5. Sukurti dinaminės vizualinės kriptografijos principu funkcionuojantį eksperimentinį įrenginį, skirtą žmogaus regos sistemos diagnostikai.
Tyrimo metodai programinės priemonės: • Tyrimuose naudojama optinio muaro metodo teorija, ji praplečiama ir
toliau vystoma. • Dinaminės vizualinės kriptografijos, pagrįstos netiesiniais virpesiais,
koncepcijos sukūrimui ir realizavimui naudojami informacijos vizualizavimo ir apdorojimo metodai, kurie yra pagrįsti matematine bei statistine analize, skaitmeninių vaizdų apdorojimo principais.
• Tyrimams atlikti naudojamos programinės priemonės parašytos Matlab R2009b terpėje, vaizdų analizavimui ir apdorojimui panaudotos Matlab sistemos įrankinės.
• Eksperimentinio kompiuterinio įrenginio sukūrimui panaudotos Adobe kompanijos programinės priemonės (Adobe Flach Profesional CS8).
30
• Gauti eksperimentų rezultatai apdorojami matematinės statistikos metodais pasinaudojant IBM SPSS Statistics programa.
Darbo mokslinis naujumas ir praktinė svarba: • Surasta beveik optimali laiko funkcija ir patobulinti vaizdo kodavimo
muaro gardelėje metodai leido padidinti dinaminės vizualinės kriptografijos saugumą.
• Vibruojančių sistemų patikimumui nustatyti pasiūlyta bekontaktė optinė tyrimo metodika, leidžiantis tiesiogiai, be papildomų priemonių nustatyti gedimus atsirandančius vibruojančiose konstrukcijose.
• Optiniam chaotinių virpesių intensyvumui vertinti pasiūlyta naudoti metodikas, pagrįstas dinaminės vizualinės kriptografijos efektais.
• Išvesti sąryšiai, susiejantys pikselio išmatavimus, judesio parametrus, ekrano fizines charakteristikas, laike vidurkinto vaizdo vizualinį interpretavimą, leido sukonstruoti naują žmogaus regos sistemos tyrimo įrenginį įgalinantį registruoti žmogaus regos sistemos gebėjimą interpretuoti laike vidurkintus vaizdus.
Gynimui pateikiama: 1. Rasta beveik optimali laiko funkcija, leidžianti padidinti dinaminės
vizualinės kriptografijos saugumą. 2. Sukurtas vibrostendų patikimumo tyrimo metodas pagrįstas laike
vidurkintomis muaro juostomis. 3. Dinaminės vizualinės kriptografijos metodai pritaikyti optiniam
chaotinių virpesių vertinimui. 4. Sukonstruotas dinaminės vizualinės kriptografijos pagrindu
funkcionuojantis žmogaus regos sistemos tyrimo įrenginys. Darbo rezultatų aprobavimas: Eksperimentai buvo atlikti Kauno technologijos universiteto Gynybos
technologijų instituto laboratorijoje ir Lietuvos sveikatos mokslų universiteto ligoninės Akių ligų klinikoje. Rezultatai panaudoti atliekant Lietuvos mokslo fondo projektą „Dinaminė vizualinė kriptografija žmogaus regos sistemos tyrimams“. Projekto laikotarpis – 2012–2014 m.
Pagrindiniai disertacijos darbo rezultatai paskelbti 4 publikacijose, 3 iš jų mokslinės informacijos instituto (ISI) pagrindinio sąrašo leidiniuose su citavimo indeksais, vienas paskelbtas tarptautinės duomenų bazės leidinyje. Disertacijoje nagrinėjama tematika buvo pristatyta 2 tarptautinėse ir 1 respublikinėje konferencijose. Parodoje-konkurse „KTU Technorama 2014“ pristatytas darbas „Dinaminės vizualinės kriptografijos taikymas žmogaus regos sistemos tyrimams“ buvo apdovanotas užėmus trečiąją vietą. Pagal kompanijos Wolfram kvietimą sukurtas demonstracinis projektas „Stochastic Time-Averaged Moiré Fringes“ ir patalpintas Wolfram Demonstrations Project bibliotekoje. Straipsnis „Dynamic visual cryptography for optical control of vibration generation
equipment“ apžvelgtas Kanados internetinėje duomenų bazėje „Advances in Engineering“, pristatančioje paskutinius mokslo atradimus bei naujienas.
Darbo apimtis ir strukt ūra: Daktaro disertaciją sudaro įvadas, 5 pagrindiniai skyriai, išvados,
literatūros sąrašas ir autoriaus publikacijų sąrašas. Disertacijos apimtis yra 113 puslapių. Disertacijos pagrindinėje dalyje, apimančioje 85 puslapius yra 62 paveikslai, 6 lentelės, 88 šaltinių cituojamos literatūros sąrašas. UDK – 534.2 + 530.182] (043.3) SL344. 2015-02-10, 2 leidyb. apsk. l. Tiražas 70 egz. Užsakymas 59. Išleido leidykla „Technologija“, Studentų g. 54, 51424 Kaunas Spausdino leidyklos „Technologija“ spaustuvė, Studentų g. 54, 51424 Kaunas


![An Approach for Grey Scale Image in Visual Cryptography ... · visual cryptography via half toning [8]. This visual cryptography technique uses dots to stimulate contiguous tone imagery](https://img.pdfslide.net/doc/110x75/60228ce1debc865c13580072/an-approach-for-grey-scale-image-in-visual-cryptography-visual-cryptography.jpg)