Embed Size (px)
Citation preview

PLEASE SCROLL DOWN FOR ARTICLE
This article was downloaded by: [University Of Exeter]On: 15 October 2010Access details: Access Details: [subscription number 918674994]Publisher Taylor & FrancisInforma Ltd Registered in England and Wales Registered Number: 1072954 Registered office: Mortimer House, 37-41 Mortimer Street, London W1T 3JH, UK
Dynamical SystemsPublication details, including instructions for authors and subscription information:http://www.informaworld.com/smpp/title~content=t713414890
A minimal system with a depth-two heteroclinic networkTsuyoshi Chawanyaa; Peter Ashwinb
a Graduate School of Information Science and Technology, Osaka University, Toyonaka, Japan b
Mathematics Research Institute, School of Engineering, Mathematics and Physical Sciences, Universityof Exeter, Exeter EX4 4QF, UK
First published on: 04 August 2010
To cite this Article Chawanya, Tsuyoshi and Ashwin, Peter(2010) 'A minimal system with a depth-two heteroclinicnetwork', Dynamical Systems, 25: 3, 397 — 412, First published on: 04 August 2010 (iFirst)To link to this Article: DOI: 10.1080/14689367.2010.500102URL: http://dx.doi.org/10.1080/14689367.2010.500102
Full terms and conditions of use: http://www.informaworld.com/terms-and-conditions-of-access.pdf
This article may be used for research, teaching and private study purposes. Any substantial orsystematic reproduction, re-distribution, re-selling, loan or sub-licensing, systematic supply ordistribution in any form to anyone is expressly forbidden.
The publisher does not give any warranty express or implied or make any representation that the contentswill be complete or accurate or up to date. The accuracy of any instructions, formulae and drug dosesshould be independently verified with primary sources. The publisher shall not be liable for any loss,actions, claims, proceedings, demand or costs or damages whatsoever or howsoever caused arising directlyor indirectly in connection with or arising out of the use of this material.

Dynamical SystemsVol. 25, No. 3, September 2010, 397–412
A minimal system with a depth-two heteroclinic network
Tsuyoshi Chawanyaa and Peter Ashwinb*
aGraduate School of Information Science and Technology, Osaka University, Toyonaka, Japan;bMathematics Research Institute, School of Engineering, Mathematics and Physical Sciences,
University of Exeter, Exeter EX4 4QF, UK
(Final version received 20 June 2010)
We present an example of a three-dimensional ordinary differential equation withan invariant set that is a heteroclinic network of depth two (a heteroclinicnetwork with a hierarchical structure) between hyperbolic equilibria. This is thefirst example of minimal dimension (namely, three dimensions) that is robust fora constrained system of ODEs – the constraint is that the flow preserves theboundaries of an invariant cube and an axis through opposite faces of the cube.We examine the system from both analytical and numerical viewpoints, and in aneighbourhood of the network we derive a reduced, one-dimensional, return mapwhere we observe a variety of complicated dynamical behaviours. This includesco-existence of infinitely many stable limit cycles, and we present evidence thatthere may be infinitely many chaotic attractors within this neighbourhood.
Keywords: heteroclinic network; attractor
1. Introduction
Heteroclinic and homoclinic cycles are important for understanding the dynamics ofnonlinear systems near intermittent and, indeed, chaotic states. They are cyclic flowinvariant sets composed purely of equilibria and their linked unstable manifolds. Asattractors, they are truly nonlinear phenomena that typically only appear at isolatedparameter values in general unconstrained systems. On the other hand, for dynamicalsystems with constraints, heteroclinic cycles may be robust and attracting, in particular forsystems with symmetries [1] or for dynamics on manifolds with boundary, such asdynamics on a simplex [2].
It is also known that heteroclinic cycles may link together to form heteroclinic networksof considerable complexity. As noted in [3–5] there may be additional types of connectionsthat are not from equilibrium to equilibrium; there may be connections to or from‘heteroclinic subcycles’. The cycles that may be connected to or from are called ‘childcycles’ in [4,5] and the more general ‘depth two’ networks [3] are where all points in theinvariant set are one of (a) equilibria, (b) connections between equilibria or (c) trajectoriesthat limit onto connections between equilibria, i.e. connections between connections.Depth two networks have previously been found in ODEs of dimension nine [3], eight [6],five [4,5] and four [7] but not until now in ODEs of dimension three. By a simple argument,one cannot find a depth two cycle between hyperbolic equilibria in dimension two, andhence the example we present here has a minimal dimension. To see that a depth two cycle
*Corresponding author. Email: [email protected]
ISSN 1468–9367 print/ISSN 1468–9375 online
� 2010 Taylor & Francis
DOI: 10.1080/14689367.2010.500102
http://www.informaworld.com
Downloaded By: [University Of Exeter] At: 13:04 15 October 2010

between hyperbolic equilibria requires a phase space of three or more dimensions, observethat if a heteroclinic cycle is attracting for a flow in R
2, then there will be a closed curvenear the cycle that can only be crossed once by any given trajectory.
The purpose of this article is to present what we believe to be one of the simplestexamples of a depth two heteroclinic cycle. The example appears as an invariant set for anexplicit polynomial ODE in three dimensions on a cube, and we note that it is robust toperturbations that leave the cube, and a line through the cube, invariant. The article isstructured as follows: in Section 2 we define the flow, describe its basic properties and thedepth two cycle as an invariant set composed of equilibria and unstable manifolds.Section 3 derives and discusses a reduced return map on a section near the cycle tounderstand its long-term dynamical behaviour. Technical details of the approximation ofthe map are given in the on-line Appendix A. Section 4 presents some numericalsimulations of orbits of the system and the reduced return map, including evidence ofinfinitely many limit cycles and infinitely many chaotic attractors. Finally, in Section 5 wegive a discussion of the relevance of the dynamics of the studied example to more generaldynamical systems.
2. An example with a depth two heteroclinic network
We consider the following three-dimensional ODE with (x, y, z)2R3:
_x ¼ vxðx, y, zÞ ¼ ð1� x2Þ½ð1� zÞðx� !y3Þ þ ð1þ zÞð�x� x3 þ ð2þ 2�Þxy2Þ�,
_y ¼ vyðx, y, zÞ ¼ ð1� y2Þ½ð1� zÞð�yþ 2x2yþ !x3Þ þ ð1þ zÞð�2yÞ�,
_z ¼ vzðx, y, zÞ ¼ ð1� z2Þ½1þ �ð1þ zÞ � 2ð1� x2Þð1� y2Þ�,
ð1Þ
where �, � and ! are parameters. We assume that the parameters are in the region j�j51/2,�� 0 and !41. The flow is such that the six planes (x¼�1, y¼�1, z¼�1) are invariantfor the flow, and hence the cube
C ¼ ½�1, 1�3
is an invariant set. In addition the system is invariant under the �-rotation around thez-axis, (x, y, z) � (�x,�y, z)¼Z�(x, y, z), and thus the z-axis
Z ¼ fð0, 0, zÞ : z 2 Rg
is also flow invariant. Recall that the intersections of invariant sets are also invariant,meaning that C \Z ¼ (0, 0,�1) as well as the vertices of C are equilibria of the flow.
2.1. Equilibria and invariant subspaces
The system (1) has, in addition to the vertices of C and C \Z, six additional equilibria(�1, 0, 1), (0,�1, 1), (�Ex,�Ey,�1) on the boundary of the invariant cube. We label theequilibria as shown in Table 1, noting that besides the listed ones, there exist symmetricimages of them under Z�. We use ~ to label these images, for example,~A ¼ Z�ðAÞ, ~B ¼ Z�ðBÞ.
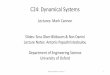
In the first place, let us examine the flow on the z¼�1 plane. As is illustratedin Figure 1, the fixed point in the centre of the square Q¼ (0, 0,�1) is a saddle point.
398 T. Chawanya and P. Ashwin
Downloaded By: [University Of Exeter] At: 13:04 15 October 2010

Its stable manifold consists of two orbits coming, respectively, from E and ~E. Its unstable
manifold consists of two orbits, both of which are asymptotic to heteroclinic cycle � on the
border of the square, i.e. four saddles and the straight orbits connecting them as
fA! B! ~A! ~B! Ag.We confirm that the unstable manifold of Q does not terminate inside the square, and
thus is asymptotic to �. First we will find the equilibria inside the square [�1, 1]�
[�1, 1]� {�1}. The flow on the z¼�1 plane can be written as
_x ¼ 2ð1� x2Þðx� !y3Þ,
_y ¼ 2ð1� y2Þð�yþ !x3 þ 2x2yÞ:ð2Þ
By solving _x ¼ 0, we obtain x¼!y3. Substituting this into another condition _y ¼ 0,
we obtain
yð�1þ !4y8 þ 2!2y6Þ ¼ 0: ð3Þ
(a)
A
A B
B
Q
E
E
~
~
~
x
y(b)
–1
–0.5
0
0.5
1
–1 –0.5 0 0.5 1
y
x
Figure 1. The qualitative flow on the z¼�1 plane. The stable and unstable manifolds of Q areshown (a) schematically and (b) numerically for !¼ 10.0. Note that � and � do not affect the flow onthis plane.
Table 1. The location and linear stability (eigenvalues of linearization)corresponding to the equilibria of (1) on the surface of the cube C.
Label Position (�x, �y, �z)
q (0, 0, 1) (�2, �4, 2� 4�)a (1, �1, 1) (�8�, 8, �2� 4�)b (1, 1, 1) (�8�, 8, �2� 4�)c (1, 0, 1) (8, �4, �2� 4�)d (0, 1, 1) (2þ 4�, 8, �2� 4�)Q (0, 0, �1) (2, �2, �2)A (1, �1, �1) (�4(!þ 1), 4(!�1), 2)B (1, 1, �1) (4(!� 1), �4(!þ 1), 2)E (Ex, Ey, �1) (þ, þ, �)
Dynamical Systems 399
Downloaded By: [University Of Exeter] At: 13:04 15 October 2010

The terms in the brackets are monotonically increasing in y2, and thus there exists only onepair of solutions y¼�Ey besides y¼ 0. Let us label the corresponding equilibria in this
plane as E ¼ ðEx ¼ !E3y,EyÞ and ~E ¼ ð�Ex, �EyÞ.
We show that E, ~E are not saddles. Let C denote a closed curve along (but not on) theedge of the square, and consider the degree of C: the rotation number of the image of C(by the map ðx, yÞ� ð _x, _yÞ) around the origin. As is easily confirmed, the degree of C is 1.The degree of C should coincide with the sum of index of equilibria encircled by C, andthere exist only three equilibria namely Q, E and ~E. Q is a saddle with index �1, thus other2 equilibria (E and ~E ) must have index þ1 (they must have the same index value becauseof the Z�-symmetry).
We introduce a transformation X¼ tanh�1(x), Y¼ tanh�1(y) that maps the inside ofthe square homeomorphically onto R
2. In the new coordinates
_X ¼ VXðxðX Þ, yðY ÞÞ ¼ 2ðx� !y3Þ,
_Y ¼ VYðxðX Þ, yðY ÞÞ ¼ 2ð�yþ !y3 þ 2x2yÞð4Þ
and thus
@
@XVX þ
@
@YVY ¼ 2x2ð1� y2Þ þ 2y2ð1� x2Þ � 0: ð5Þ
This positive divergence inside the square (except for the origin) indicates that (i) the flowhas no closed orbit and (ii) the flow has no attractor inside the square. It also indicates thatE and ~E are repelling equilibria. (The positive divergence implies existence of at least onepositive eigenvalue, and E and ~E are isolated equilibria with index þ1.) From thesearguments it is clear that the unstable manifold of Q cannot terminate inside the square,and thus must be asymptotic to the boundary cycle �.
The flow on the z¼þ1 plane is
_x ¼ 2ð1� x2Þð�x� x3 þ ð2þ 2�Þxy2Þ, _y ¼ 2ð1� y2Þð�2yÞ: ð6Þ
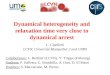
As illustrated in Figure 2, the flow has mirror symmetry on x¼ 0 and on y¼ 0, and theequilibrium in the centre of the square q¼ (0, 0,þ1) is a stable equilibrium, which is theunique attractor in this plane.
2.2. The heteroclinic network
We note that there is an ‘edge’ heteroclinic cycle � ¼ fA! B! ~A! ~B! Ag thatattracts almost all points inside the square on z¼�1 plane. However, it is repelling in thetransverse (z) direction because of the unstable manifolds at A and B being twodimensional.
The unstable set of � forms the side walls of the cube. There are eight equilibria a, ~a, b,~b, c, ~c, d, ~d, on the edge of the unstable set of �. All of these equilibria are placed on thez¼þ1 plane, and are attractive in the direction transverse to the z¼þ1 plane; however,they have instability in the xy-direction.
As for the flow restricted on the z¼þ1 plane, q is the unique stable equilibrium.However, it is also a saddle, since it is unstable in the z-direction. The unstable manifold ofq is on the z-axis, and terminates at Q. This point has an unstable direction, and as isshown before, its unstable manifolds are asymptotic to the heteroclinic cycle �. Thus, we
400 T. Chawanya and P. Ashwin
Downloaded By: [University Of Exeter] At: 13:04 15 October 2010

have demonstrated that
� ¼ fQ! � ! fd, ~d! a, b, ~a, ~b! c, ~cg ! q! Qg
is a heteroclinic network with depth two; we illustrate in Figure 3 the structure of this
network as inferred above.
a
a b
b
cc
d
d
q
~
~
~
~
x
y
Figure 2. Schematic diagram showing the flow on the z¼þ1 plane: there is a single sink at q thatattracts all trajectories except those on the boundary of the square.
z
B
~
~
~~
~
~
x
y
A
a
bq
Q
d
c
b
A
d
c
B
a
Figure 3. The complete heteroclinic network � consists of the union of the unstable manifolds of theequilibria marked A, B, Q, a, b, c, d, q and their symmetric images indicated by ~A, ~B, ~a, ~b, ~c, ~d. Notethe subcycle � connecting A,B, ~A, ~B.
Dynamical Systems 401
Downloaded By: [University Of Exeter] At: 13:04 15 October 2010

3. Analysis of the return map
3.1. Preparation
In this section, we examine properties of the return map to a surface of section near �. Westart with some definitions and notation, and then move on to the results; the details of theanalysis are given in the on-line Appendix A.
3.1.1. Transformed variables
In the following analysis, we frequently use the transformed variables
XðxÞ ¼ tanh�1ðxÞ
Yð yÞ ¼ tanh�1ð yÞ
ZðzÞ ¼ tanh�1ðzÞ
ð7Þ
as these are convenient to express the distance from invariant planes x¼�1, y¼�1,z¼�1 (e.g., in the neighbourhood of x¼ 1, X’ 0.5 log j1� xj) and for the analysis of thereturn map. Note that (1) in transformed variables can be written as a fourth-orderpolynomial system in (x, y, z):
_X ¼ Vxðx, y, zÞ ¼ ½ð1� zÞðx� !y3Þ þ ð1þ zÞð�x� x3 þ ð2þ 2�Þxy2Þ�
_Y ¼ Vyðx, y, zÞ ¼ ½ð1� zÞð�yþ 2x2yþ !x3Þ þ ð1þ zÞð�2yÞ�
_Z ¼ Vzðx, y, zÞ ¼ ½1þ �ð1þ zÞ � 2ð1� x2Þð1� y2Þ�:
ð8Þ
We will write (Vx(xP, yP, zP), Vy(x
P, yP, zP), Vz(xP, yP, zP)) where P¼ (xP, yP, zP) is one of
the equilibria, as ~�P ¼ ð�Px ,�
Py ,�
Pz Þ.
3.1.2. Upper bounds for growth of discrepancy between nearby orbits
We now provide some inequalities to evaluate the discrepancy between two nearby orbits.Let us write ~xi ¼ ðxi, yi, ziÞ and ~Xi ¼ ðtanh
�1ðxiÞ, tanh
�1ð yiÞ, tanh
�1ðziÞ
� �. Then
d
dtð~x1ðtÞ � ~x2ðtÞÞ
�������� � Cxk~x1ðtÞ � ~x2ðtÞk, ð9Þ
d
dtð ~X2ðtÞ � ~X1ðtÞÞ
�������� � CXk~x1ðtÞ � ~x2ðtÞk, ð10Þ
k~x1ðt1Þ � ~x2ðt1Þk � expðCxjt1 � t0jÞk~x1ðt0Þ � ~x2ðt0Þk, ð11Þ
kð ~X2ðt1Þ � ~X2ðt0ÞÞ � ð ~X1ðt1Þ � ~X1ðt0ÞÞk � CX expðCxjt1 � t0jÞk~x1ðt0Þ � ~x2ðt0Þk, ð12Þ
where Cx and CX are constants, for any t, t0 and t1.
3.1.3. Return map in a neighbourhood of the saddles and heteroclinic orbits
We will obtain an estimation for the return map, which is valid for a ‘smallneighbourhood’ of �. To be more concrete, let us first consider a small rectangularregion in the neighbourhood of each saddle.
402 T. Chawanya and P. Ashwin
Downloaded By: [University Of Exeter] At: 13:04 15 October 2010

Let P denote one of the saddles in �, namely, fa, b, c, d, ~a, ~b, ~c, ~d,A,B, ~A, ~B, q,Qg,and define U�(P) as
U�ðPÞ :¼ fðx, y, zÞ 2 ½�1, 1�3 : maxfjx� xPj, j y� yPj, jz� zPjg5 �g, ð13Þ
which is a rectangular region.For saddles Q and q, we also use a restricted subset of U�(�), given as
Uþ� ðQÞ :¼ U�ðQÞ \ fðx, y, zÞ : jxj4 j yjg, ð14Þ
Uþ� ðqÞ :¼ U�ðqÞ \ fðx, y, zÞ : jxj4 j yjg: ð15Þ
In the following argument, we assume that � is a small positive constant so that the flow inU�(P) is qualitatively the same as the linearized flow.
By hyperbolicity, we can assume that the distance from (local) unstable/stable manifolddecays/grows exponentially, and the rate of the decay/growth is at least half of thecorresponding eigenvalue. In addition, if �P
� 6¼ 0 (� is x, y or z), we require that2jV�ðx, y, zÞj4 j�P
� j holds for any (x, y, z)2U�(P). We also assume that � is sufficientlysmall to assure the exponential growth of x-component ( ddt jxj4 �Qx jxj=2
� �¼ jxj) in Uþ� ðQÞ,
(�5min{1/6, 1/!} is enough for this condition).We also assume that on each surface of U�(P), the direction of the flow (i.e. inflow/
outflow) is the same as the linearized one. Note that all the eigenvectors of the linearizedflow around the considered saddles are aligned in the direction of x, y or z. We alsoassume that
2ð!þ 1Þ�2 5 1, ð16Þ
which implies that the orbits do not escape from Uþ� ðQÞ and Uþ� ðqÞ through the planes{x¼ y} or {x¼�y}.
3.1.4. The transition between saddles
Let
P,P 0 2 fa, ~a, b, ~b, c, ~c, d, ~d, q,A, ~A,B, ~Bg
be two saddles such that there is a heteroclinic connection P!P0 that is a straight lineoriented in one of the x, y or z directions. For this (finite number of) heteroclinicconnections, we can obtain a lower bound for speed as
k~vð~xÞk4minfð1þ 2�Þ�, ð1� 2�Þ�, 4��, 2ð!� 1Þ�g, ð17Þ
thus the time needed for travel between U�(P) and U�(P0) is bounded below by a certain
constant.Consequently, we can say that if an orbit passes a point in a sufficiently small (��)
neighbourhood of the ‘transition segment’ of the straight heteroclinic connection (i.e. thesegment outside U�(P) and U�(P
0)), the orbit also connects U�(P) and U�(P0) within a
certain constant duration, and thus the amplitude of the corresponding change of ~X duringthe transition is also bounded by the constant CH. This means that we can chooseconstants �� and CH that satisfy the following hypothesis: Provided that (i) the distancebetween a point ~x and the straight heteroclinic orbit connecting P and P0 is smaller than ��
and (ii) ~x is not inside U�(P) and U�(P0), then we can find points ~xf and ~xt on the orbit
passing through ~x, such that ~xf 2 U�ðPÞ and ~xt 2 U�ðP0Þ and k ~Xt � ~Xf k5CH.
Dynamical Systems 403
Downloaded By: [University Of Exeter] At: 13:04 15 October 2010

To satisfy these requirements, � and �� should be fairly small but still bounded awayfrom zero. In the following arguments, the main target of our analysis is the case where thedistance of the orbit from � is much smaller than �, and so we approximate by treating thequantities of order jlog �j as insignificant.
3.2. Properties of the return map
Now let us turn to the return map on a certain surface of section. Let � denote a squareregion on the z¼ 0 plane, {(x, y, z) : jxj � ��, jyj � ��, z¼ 0}, and �þ denote a subset �þ¼
{(x, y, z) : jyj � jxj � ��, z¼ 0}. Let f~xðtÞg be an orbit of (1), with ~xð0Þ ¼ ðx�0 , y
�0 , 0Þ 2 �þ,
and �0¼� log jx(0)j.In the on-line Appendix A, we show that there is a set G�R of large measure in R
such that if �02G� then the orbit will return to �þ. Let ~x�1 ¼ ðx
�1 , y
�1 , 0Þ denote the next
intersection, and �1 :¼ � log jx�1 j, then �1 can be written in the form,
�1 ¼ �ð�0Þ þ ð�0, y�0 Þ: ð18Þ
We can conclude the following:
. j ð�0, y�0 Þj is bounded.
. �(�) is a piecewise linear function such that �(�) on �2 (k, kþ1) is given by
�ð�Þ ¼ �k þ�kþ1 ��k
kþ1 � kð�� kÞ, ð19Þ
where {k} is a monotonic increasing sequence. In fact, {k} and {�k} are divergentsequences that satisfy
limk!1
kþ1k¼!þ 1
!� 1, ð20Þ
and
limk!1
�2k
2k¼ð1þ 2�Þ
1� 2�,
limk!1
�2kþ1
2kþ1¼ð1þ 2�Þ
1� 2�ð1þ �Þ:
ð21Þ
. The set G� as detailed in the on-line Appendix A is
G� ¼ ðC�,1Þ n[k
ð2kþ1 � C, 2kþ1 þ CÞ, ð22Þ
where C� and C are constants. Note that {k} is a geometrically divergingsequence and thus G� includes in some sense ‘most’ sufficiently large numbers.
The obtained piecewise linear approximation has a repetitive structure built up fromcopies of two linear segments. Its asymptotic form has a discrete scale invariance with scalefactor (!þ 1)2/(!�1)2, as illustrated in Figure 4.
It should be noted that the approximation is valid only in G�, and the neighbourhoodsof the segment points (2kþ1) are excluded from G�. As is shown in the on-line AppendixA, the number of rotations around the z-axis differs by a half for the orbits corresponding
404 T. Chawanya and P. Ashwin
Downloaded By: [University Of Exeter] At: 13:04 15 October 2010

to the branches of both sides of 2kþ1. Thus, there must exist a certain point in theneighbourhood of each 2kþ1 that corresponds to the intersection with the stable manifoldof Q. Consequently, if an orbit of the approximate (reduced) return map falls in theneighbourhood of these points, it implies the existence of (extremely small but non-zero)probability that the distance from � in the next return to the surface of section becomesarbitrarily small.
4. Qualitative behaviour of the system
We now consider some aspects of the qualitative asymptotic behaviour of the orbits usingthe reduced return map � � �(�) derived in the previous section. We use the asymptoticform of the map (19) as a piecewise linear function to analyse the behaviour of the reducedsystem. We have also carried out direct numerical simulations and the results using bothapproaches are discussed below.
4.1. Dynamics of the reduced return map
If the reduced return map has an attractor A, then it is expected that the true return maphas a corresponding attracting set in �þ\ {(x, y, z) : log jxj 2B(A)} where B(A) is a certainneighbourhood of A, and thus the corresponding attracting set of the original flowalso exists.
It should be recalled that this does not work if 2kþ1 is contained in the attractor of thereduced return map. We consider two orbits that start from �þ and their starting pointscorrespond, respectively, to the branches separated at 2kþ1. Those two orbits come backto �þ with mutually opposite sign of x-component. Thus a connected set in �þ that
(S,Rα S)
(RωS,RαRβRωS)
(R2ωS,RαR2
ωS)
(Sa,Sa)
(Sb,Sb )
(R2ωSb,R
2ωSb)
Ω
Ψ(Ω
)
Figure 4. Asymptotic form of reduced return map ��ð�Þ schematically showing ��ð�Þ as a function of� (i.e. showing the approximate value of log(jxj) on returns to the section �).
Dynamical Systems 405
Downloaded By: [University Of Exeter] At: 13:04 15 October 2010

extends over the region corresponding to the segments on both the sides of 2kþ1 inevitablycross with the stable manifold of Q, and consequently cannot be an attractor. Therefore, if
2kþ1 is contained within a connected attractor of the reduced return map, we cannot
simply expect the existence of a corresponding chaotic attractor in the 3d-flow.Now let us look into the dynamics of the reduced return map using its asymptotic
form. Let us write a part of its asymptotic form �� on a segment ðS,R3!SÞ concretely as,
��ð�Þ ¼
R�SþR�R�R!S� R�S
R!S� Sð�� S Þ, for ðS � �5R!S Þ,
R�R�R!SþR�R
2!S� R�R�R!S
R2!S� R!S
ð�� R!S Þ, for ðR!S � �5R2!S Þ,
R�R2!Sþ
R�R�R3!S� R�R
2!S
R3!S� R2
!Sð�� R2
!S Þ, for ðR2!S � �5R3
!S Þ,
8>>>>>>><>>>>>>>:
ð23Þ
with
R� ¼1þ 2�
1� 2�,
R� ¼ 1þ �,
R! ¼!þ 1
!� 1:
ð24Þ
Note that R�40, R�41, R!41 follows from the assumption on the parameters �, �, !.We will be interested in parameters such that (23) has localized attractors, meaning
that the network � itself is in some sense marginally stable. Some necessary conditions for
the existence of localized attractors are:
R�5 1, ð25Þ
R�R�4 1: ð26Þ
If the first condition is not satisfied then the orbits of this map are monotonic increasing,
implying that � as a whole is attracting in its neighbourhood. If the second condition is not
satisfied then the orbits of this map are monotonic decreasing, although in this case one
cannot simply conclude that � is repelling, because of the orbits that may consistently hit
points in the complement of G�. In such cases, the network � could be a part of an
attractor.Note that (25) and (26) are equivalent to
�5 0 �4�4�
1þ 2�: ð27Þ
When these conditions are satisfied, there is a fixed point on each segment, namely,
Sa ¼ R!SþR�R� � 1
ðR�R� � 1Þ þ ð1� R�ÞR!ðR! � 1ÞR!S,
Sb ¼ Sþ1� R�
ð1� R�Þ þ ðR�R� � 1ÞR!ðR! � 1ÞS,
ð28Þ
406 T. Chawanya and P. Ashwin
Downloaded By: [University Of Exeter] At: 13:04 15 October 2010

and Sb (and its images by the scale transformation) is always unstable. However, Sa can bestable when
�15ðR�R
2! � R�R�R!Þ
R2! � R!
5 1 ð29Þ
is satisfied. This in turn implies that
�54
ð!� 1Þð1þ 2�Þ: ð30Þ
The map may have chaotic attractors; if in addition to (25) and (26),
ðR�R2! � R�R�R!Þ
R2! � R!
5�1 ð31Þ
holds (which implies that �4 4ð!�1Þð1þ2�Þ) and
��ðR2!S Þ4R!S
ð ��Þ2ðR2!S Þ4R2
!Sb
, ð32Þ
are satisfied then the map can have chaotic attractors that do not contain 2kþ1. Thismeans that most of the attractors of the reduced map is contained in G�. In such cases,original flow will have corresponding attractors that are also chaotic.
The reduced map also has chaotic attractors in the cases where (25), (26), (31) andeither
��ðR!S Þ5R2!S
ð ��Þ2ðR!S Þ5Sb
, ð33Þ
or
��ðR!S Þ5R2!Sb
��ðR2!S Þ4Sb
, ð34Þ
are satisfied. In such cases, however, each attractor of the reduced map contains (one ofthe) 2kþ1 that is not in G�, thus it is probable that the orbits of the original flow visit any
sufficiently small neighbourhood of the stable manifold of Q after a long stay on theapparent attractor. Thus, in this case, the family of attractors in the reduced system maycorrespond to a family of invariant sets in the original flow that are not attracting butnonetheless where long chaotic transients may be observed as orbits progress towards thenetwork �.
4.2. Numerical examples
In the analysis of the previous section, we have examined the behaviour of the orbits in a‘sufficiently small’ neighbourhood of �. This section demonstrates that some of the expectedregular structures in the reduced returnmap can be verified by numerical calculations for theoriginal system (1). Clearly, one needs to take great care in ensuring that the solutions
obtained have relevance to the original system and are not dominated by round-off errorswhen the trajectory comes close to the boundaries of the invariant cube or saddles.
Dynamical Systems 407
Downloaded By: [University Of Exeter] At: 13:04 15 October 2010

Because of this we use double precision floating point representations for the system,re-written in the coordinates (7) that map the cube onto the whole of R
3.The numerically obtained return map is shown in Figure 5. We numerically follow the
orbit with initial point (exp(��), 0, 0), and obtain the next intersection with the z¼ 0 planewith _z50 as (x0, y0, 0). The relation between � and �0 :¼� log jx0j is exhibited in the figurein linear scale (in box (a)), as well as in log scale (in boxes (b) and (c)). In this plot, theperiodic structure is apparent as expected from the asymptotic analysis.
4.2.1. Example with infinitely many limit cycles (!¼ 10.0, �¼�0.02, �¼ 0.3)
The reduced return map has infinitely many stable fixed point attractors for !¼ 10.0,�¼�0.02 and �¼ 0.3. Thus correspondingly, the original system is expected to havea family of infinitely many stable limit cycles. We can observe a few of them numerically,
(a)
0
20
40
60
80
100
120
0 20 40 60 80 100 120Ω
Ψ(Ω
)
(b)
10
100
10 100Ω
Ψ(Ω
)
(c)
10
100
10 100Ω
Ψ(Ω
)
Figure 5. Numerically obtained reduced return map for � (—), together with its piecewise linearapproximation (�0 ¼�(�)) ( ). In (a) and (b), the parameters are set to !¼ 10.0, �¼�0.02,�¼ 0.3. (a) is plotted in linear scale (note that � itself represents the logarithm of x-component�log jx0j), while (b) is the same map plotted in a log-scale. (c) is plotted in log-scale with!¼ 10.0,�¼�0.03, �¼ 0.55. �(�) is calculated with �¼ 0.01. As observed in the linear plot (a),estimation error does not diminish with large �, however it can be a ‘good’ approximation in largeregion of � as shown in log-scaled plots (b) and (c).
408 T. Chawanya and P. Ashwin
Downloaded By: [University Of Exeter] At: 13:04 15 October 2010

as is shown in Figure 6. There are two types of attractors that differ by their symmetryunder the action of Z�; each of the stable fixed point in the reduced return mapcorresponds to either a symmetric limit cycle or a pair of asymmetric limit cycles. Bothtypes of limit cycles appear alternately for increasing �.
4.2.2. Example with infinitely many presumably chaotic attractors (!¼ 10.0, �¼�0.03,�¼ 0.55)
For this parameter set the reduced return map has infinitely many chaotic attractorswithin G�. Thus, we expect that the original system has a family of infinitely manyattractors that are presumably chaotic. We can observe a few of them numerically, and oneof them is shown in Figure 7. As shown in the cobweb plot, the distance between the orbitand � fluctuates in an apparently chaotic manner. The escape routes from � also fluctuateand spread over a large part of the x¼ 1 plane. We suggest this indicates that thedimension of the attractor is slightly larger than 2, despite many parts of the attractorbeing confined to a small region around some one-dimensional connections.
5. Comments and discussion
In summary, we have presented and analysed the dynamics of a system of minimaldimension (three coupled ODEs) with a depth two heteroclinic network. Despite thedissipative nature of the flow, the network behaves as a marginally stable structure for theopen range of parameters that satisfy (25) and (26). For parameters that give marginalstability of the network, we find a rich dynamical behaviour in the neighbourhood of the
(a)
–100–80–60–40–20
0 20 40 60 80
100
3000 3200 3400 3600 3800 4000
X(t
)
X(t
)
t
(b)
–150
–100
–50
0
50
100
150
3000 3200 3400 3600 3800 4000t
(c)
–1 –0.5 0 0.5 1–1
–0.5 0
0.5 1
–1–0.5
0 0.5
1
x
y
z
(d)
–1 –0.5 0 0.5 1 –1
–0.5 0
0.5 1
–1–0.5
0 0.5
1
xy
z
Figure 6. Example of limit cycle attractors for !¼ 10.0, �¼�0.02, �¼ 0.30 with initial condition setto x¼ exp(��0), y¼ 0, z¼ 0 where �0 is 60 for (a) and (c) and 90 for (b) and (d). A time sequence ofX is shown in (a) and (c) and a phase space plot of (x, y, z) in (c) and (d). The limit cycle in (a) and (c)moves along � one half of a turn more than the limit cycle in (b) and (d).
Dynamical Systems 409
Downloaded By: [University Of Exeter] At: 13:04 15 October 2010

network, reflecting behaviour found in higher dimensional examples [4,5]. Howeverbecause of the minimal dimension we are able to analyse in detail the system via itsreduced return map. Although the constructive nature of the example means that there isno obvious physical interpretation of the variables, they could, for example, representpopulation fractions in a game dynamical system involving a number of interacting
populations, or coordinates in the orbit space (e.g. mode amplitudes) of a symmetricdynamical system.
Homoclinic cycles have been known to be important organizing centres for a variety ofcomplex nonlinear behaviours in both flows and maps, since the classical analysisof Shil’nikov [8]. This includes phenomena, such as existence of a countable number ofhorseshoes, and infinities of periodic sinks in a neighbourhood of an orbit homoclinic to aperiodic cycle; see, for example [9]. The example presented in this article has a morecomplex, but still understandable structure as a homoclinic network. However, it cannotbe simply viewed as a graph between vertices corresponding to the equilibria. It would be
interesting to explore how the localised attractors bifurcate from the network on changingparameters to enter the region where (25) and (26) are satisfied. Indeed, we suspect thatShil’nikov-type structures in parameter space will appear that will create, for example, theperiodic orbits in Figure 6 (a) and (b) as parts of saddle-node pairs where the Ra,b and Sa,b
periodic points appear. Note however that the reduced map description will break downwhen we approach such a bifurcation.
The mechanism involved in the creation of the infinity of stable periodic orbits isanalogous to that seen in the ‘phase-resetting’ case of cycling chaos [10] – the one-dimensional nature of the unstable manifold of Q is important for organizing approachesto the subcycle. One can similarly design systems where Q has a two-dimensional unstable
manifold, where we would expect to see richer dynamics as in ‘non phase-resetting’ cases ofcycling chaos. It would be interesting to understand this latter case, but this is beyond thescope of this article.
Also, we note that the essential elements of the example are robust for perturbationsto smooth vector fields that preserve the constraints. In our example, the cube C and the
(a)
50
55
60
65
70
75
80
50 55 60 65 70 75 80log |x |
log
|x„|
(b)
–1–0.5
0 0.5
1 –1–0.5
0 0.5
1
–1
–0.5
0
0.5
1
xy
z
Figure 7. Example of an apparently chaotic attractor for !¼ 10.0, �¼�0.03, �¼ 0.55 with initialcondition x¼ exp(��0), y¼ 0, z¼ 0 with �0¼ 64. (a) Cobweb plot taken from the orbit of 3d-flow.It exhibits the fluctuation of the value of log jx(t)j at the moment of intersection with the z¼ 0 planewith _z50. Numerically obtained return map (corresponding part of Figure 5c) is also shown in asolid line. (b) The orbit plotted in (x, y, z) coordinates.
410 T. Chawanya and P. Ashwin
Downloaded By: [University Of Exeter] At: 13:04 15 October 2010

z-axis Z are invariant and, although this may seem artificial, similar constraints arecommon in model equations of the dynamics of spin systems or neural systems. Theexistence of the depth two network is possible with another constraint that keeps a regioninvariant (that may or may not be a cube); for example, similar effects should be present ingame dynamical systems, and in orbit space coordinates for symmetric dynamical systems.Invariant subsets caused by symmetries are similarly the reason that robust depth twoheteroclinic networks can be observed, for example, in [7]. It is expected that we can find arobust depth two network in a flow on a three-dimensional simplex with an auxiliaryconstraint that is invariance of a line between two faces; such an example is shown inFigure 8.
In addition to the dynamical behaviour of infinities of periodic orbits and ofapparently chaotic attractors, we believe that the example may be useful to reveal therange of bifurcation and dynamical behaviours typical of robust networks with depth twoconnections. Although the system has in some sense minimal complexity, several issues onthis example system are still to be explored. This includes the topological structure of thebasins of infinitely many attractors. These issues are beyond the analysis based on thereduced return map, and we suspect that an analysis based on a higher dimensionalreduced system will be needed.
References
[1] M. Krupa, Robust heteroclinic cycles, J. Nonlinear Sci. 7 (1997), pp. 129–176.[2] J. Hofbauer and K. Sigmund, Evolutionary game dynamics, Bull. Amer. Math. Soc 40 (2003),
pp. 479–519.
[3] P. Ashwin and M.J. Field, Heteroclinic networks in coupled cell systems, Arch. Ration. Mech.
Anal. 148 (1999), pp. 107–143.[4] T. Chawanya, Infinitely many attractors in a game dynamics system, Prog. Theor. Phys. 95 (1996),
pp. 679–684.
[5] T. Chawanya, Coexistence of infinitely many attractors in a simple flow, Phys. D 109 (1997),
pp. 201–241.
A
B
C
q
Q
d
e
Figure 8. Schematic illustration of a three-dimensional simplex with an auxiliary constraint (the lineQ! q is invariant) and a flow on it with a robust depth two heteroclinic network consisting of thecycle A, B, C, connections C! d! q!Q and a ‘depth two’ connection from Q back to A, B, C.
Dynamical Systems 411
Downloaded By: [University Of Exeter] At: 13:04 15 October 2010

[6] O.M. Podvigina and P. Ashwin, The 1 :ffiffiffi2p
mode interaction and heteroclinic networks forBoussinesq convection, Phys. D 234 (2007), pp. 23–48.
[7] P. Ashwin and O.M. Podvigina, Noise-induced switching near a depth two heteroclinic network,and an application to Boussinesq convection, Chaos (2010) (to appear).
[8] L.P. Shil’nikov, A contribution to the problem of the structure of an extended neighbourhood of arough equilibrium of saddle-focus type, Math. USSR Sb. 10 (1970), pp. 91–102.
[9] J. Palis and F. Takens,Hyperbolicity and Sensitive Chaotic Dynamics at Homoclinic Bifurcations,
Cambridge University Press, Cambridge, UK, 1993.[10] P. Ashwin, M. Field, A.M. Rucklidge, and R. Sturman, Phase resetting effects for robust cycles
between chaotic sets, Chaos 13 (2003), pp. 973–981.
412 T. Chawanya and P. Ashwin
Downloaded By: [University Of Exeter] At: 13:04 15 October 2010