Embed Size (px)
Citation preview

Dynamically ConfiguredWaveform-Agile Sensor Systems
Antonia Papandreou-Suppappola
in collaboration with
D. Morrell, D. Cochran, S. Sira, A. Chhetri
Arizona State University
June 27, 2006
Supported by AFOSR MURI on Waveform Diversity for Full Spectral Dominance and DARPA ISP program

Sensing Activities at Arizona State University
SenSIP: Sensing, Signal and Information ProcessingCenter (http://enpub.fulton.asu.edu/sensip/)
Research Topics
Waveform-agile sensingSensor scheduling for tracking applicationsReal-time sensing using Berkeley mote sensors(perimeter security)Adaptive tracking imager systems

Waveform-Agile Sensing
Objective
To dynamically select and configure time-varyingwaveforms in clutter environments for waveform-agilesensors
Performance criterion: minimum mean square trackingerror
Nonlinear observation models preclude exact or closedform solutions
Solution
We use the unscented transform and a particle filter thatemploys probabilistic data association to deal with theuncertainty in the measurement origin due to clutter
A greedy search is used to find the sensor configurationthat minimizes the predicted tracking error

Target kinematics and observations models
���������
���������
������
������
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
������������
������������
������������������������
������������������������
Trajectory Target
B
A
θB
[rA rA]
[rB rB]
y x
y
θA
(xA, yA)x
(xB, yB)
Constant velocitykinematics model
Sensors measuredelay-Doppler
Narrowband receivedsignal model
Xk = FXk−1 + Wk, zk = h(Xk) + Vk

Clutter Modeling
Range
Ran
ge R
ate
Clutter
Observation
Predicted
Validation Gate
Target
Each sensor validatesmultiple observations
Zk = [z1k , z2
k , . . . , zmkk ]
Number of false alarmsassumed Poissondistributed due to clutter
µ(m) =exp(−ρVk)(ρVk)
m
m!
Clutter is assumed to be uniformly distributed in theobservation space

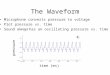
Waveform Structure
At every sampling instant, each sensor transmits a generalizedFM chirp
s(t) = a(t) exp(j2πbξ(t)), |t| < T/2 + tf
t0
Ttf tf
a(t)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
x 10−4
2
4
6
8
10
12
14
x 106
Time (s)
Fre
quen
cy (
Hz)
PFM κ = 2.8
LFM
EFM
HFM
Trapezoidal envelopeallows evaluation of theCRLB
Each sensor isindependently configured
Waveform parametervector is
θk = [ξk(t) λk bk]T

Problem Statement
At each sampling instant k, we seek the sensorconfiguration
θk =
[
θAk
θBk
]
,
that minimizes the predicted mean square tracking error
Cost function for greedy optimization
J(θk) = EXk, Zk|Z1:k−1
{
(Xk − Xk)TΛ(Xk − Xk)
}
The cost of using a waveform represents an average overfuture states, observations, and clutter realizations

Block Diagram
MSEPrediction
Target trackingParticle filter
Minimization
Sensors
Estimates of
Grid Search
MSE
TransformUnscented
Candidatewaveform
Configuration that minimizes predicted MSE
p(Xk|Z1:k, θ1:k)
∆f
λ[r r]T
ξ(t/tr)
p(Xk|Z1:k−1, θ1:k−1)

Performance Criterion
Due to the nonlinear observations model, the cost functionJ(θk) cannot be evaluated in closed form
Stochastic optimization techniques may be used to find thebest configuration θk, but they are computationallyexpensive and difficult to control
The unscented transform provides a suitable means ofevaluating the cost function
We use the covariance update of the unscented Kalmanfilter to approximate the cost

Predicted Cost Approximation
Prediction of state covariance Pk|k−1 = FPk−1|k−1FT + Q.
Unscented transform is used to generate Pixz and Pi
zzcorresponding to sensor i
Covariance update if there were no clutter
Pck|k = Pi
xz
(
Pizz + N(θi
k))−1
Pixz
T
Since measurements are of uncertain origin
Pik|k(θ
ik) = Pk|k−1 − qi
2kPc
k|k
Sequential updates for Sensor A and B yield Pk|k(θk)
Cost function is approximated as J(θk) ≈ Trace{ΛPk|k(θk)}

Radar SimulationAveraged mean square error - LFM only
0 1 2 3 4 5 610
1
102
103
104
Time (s)
Ave
rage
d M
SE
(m
2 )
λ minλ maxConfigured
ρ = 1e−3
ρ = 1e−4
Configured

Radar SimulationAveraged mean square error - agile phase function
0 1 2 3 4 5 6
101
102
103
Time (s)
Ave
rage
d M
SE
(m
2 )
LFMPFM κ = 2.8PFM κ = 3.0EFMHFMConfigured
Configured

Radar SimulationTypical waveform selection
0 1 2 3 4 5 6LFM
PFM (2.8)
PFM (3.0)
EFM
HFMSensor A
0 1 2 3 4 5 6LFM
PFM (2.8)
PFM (3.0)
EFM
HFM
Time (s)
Sensor B

Waveform Characterization
LFM PFM (2.8) PFM (3.0) EFM HFM0
0.5
1C
orre
latio
nco
effic
ient
LFM PFM (2.8) PFM (3.0) EFM HFM10
4
106
108
VG
Vol
ume
LFM PFM (2.8) PFM (3.0) EFM HFM
100
105
Waveform type
Con
ditio
nal
Var
ianc
e

Heavy Clutter Maritime Scenarios
Returns from sea clutter are known to exhibit spatial andtemporal correlation
For detection of small-RCS targets using low grazing angleradars, clutter density is high and thus SCR low: if weassume similar clutter statistics in several range bins andhigh pulse repetition frequency (PRF), then estimation ofthe subspace occupied by the clutter returns is possible
In low SCR scenarios, we can improve detection andtracking performance by subspace-based cluttersuppression

Sea Clutter Modeling
Following the work of Watts, Ward and Tough (2005)
Sea surface presents the incident radar beam with a largenumber of scattering centers
Independent contributions from the speckle give rise tolocally Gaussian statistics, characterized by shortcorrelation time (10–20 ms) and length scales
Texture (large-scale swell structures) modulates the localmean power of this speckle-like return
This texture can be modeled by a gamma distributedprocess which de-correlates much less rapidly (50-60 s)than the local speckle process
Radar return is then represented as the product of thisgamma process and a unit power Gaussian/Rayleighprocess

Waveform Adaptive Detection and Tracking
Clutter mapping,
Tracker updateinterval. . . . . . . . .. . .
. . . . . . . . . . . . . .
0 1 2 N−1 0 1 2 N−1
Waveform adaptation
PRI
Tracker update
dwell #
suppression and detection
k k + 1
k k + 1 k + 2 k + 3
Two time frames - short PRI and long tracker update
Radar scene is unchanged over two successive dwells

Clutter Suppression
. . . . . . . .
. . . . . . . . . . . . . . . .
MF output in range bins
range bins
. . . . . . . .
Transmittedsignal
r1r0 rj
0
1
N − 1
Scatterers assumed stationary across N snapshots in adwell in jth range bin (due to high PRF)Due to high clutter, target contribution is minimal acrossrange bins; estimate clutter space by estimating covariancematrix of clutter returns across neighboring range binsMeasurements extract a waveform-independent estimateof clutter subspace; orthogonal projection of receivedsignal on subspace can yield a clutter-suppressed signal

Clutter Suppression
Form the estimate of the covariance matrix of clutterreturns in the jth bin as Rj = 1
L
∑Li=1 ri rH
i where L is thenumber of bins surrounding the jth bin (training data)
Qj is the subspace corresponding to the M largest eigenvalues of Rj
r⊥j = (I − Qj)rj is the clutter suppressed signal
SCR is defined as the ratio of target power over total clutterpower in the range bin containing the target; betterdetection is achieved with higher scatterer density

Simulation Example
Pulse length: 100 ns
PRF: 2 kHz
Bandwidth: 15 MHz
SCR: −20 dB
LFM chirp waveform
N = 20 snapshots
L = 40 range-bins for covariance estimation
about 750 scatterers in the observation space
020
4060
80
05
1015
2025
0
10
20
30
40
Range bin
SCR −20 dB, ρ = 0.001
Tracker update
Mag
nitu
de o
f MF
sig
nal
Original signal, |rj|2
020
4060
80
05
1015
2025
0
0.5
1
1.5
Range bin
SCR −20 dB, ρ = 0.001
Tracker update
Mag
nitu
de o
f clu
tter−
supp
ress
ed s
igna
l
Clutter suppressed signal, |r⊥j |2

Performance of Clutter-suppression Algorithm
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.450
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Pfa
Pd −80
−75
−72
−71−70
−68
−67
−65
−55
Clutter map generated during the first dwell of each pairwill be used to design the waveform for the second dwell
Waveform design will aim at improving range estimation ofthe target, and eventually minimizing tracking error

Conclusions: Waveform Design
A greedy optimization algorithm for waveform scheduling tominimize the predicted mean square tracking error waspresented
Nonlinear observations models significantly complicate thewaveform selection problem
In more recent work, we incorporate the affect of thesidelobes of the ambiguity function on the estimation errors
We exploit the temporal correlation of clutter in asubspace-based approach to the suppression of clutterreturns (Asilomar 2006)

Binary Programming for Sensor Scheduling
Problem Statement
Track a moving target through a field of motes.
Measurements are acoustic energy from target; trackingdone at a base station
Motes are either active or in very low power standby mode.
Goal is to activate selected sensors to minimize energyconsumed while maintaining a desired track accuracy
Constrained discrete optimization problem: find set ofsensor configurations to satisfy constraint
Computational intractable as number of motes increases

Combined Tracking and Scheduling

Sensor Scheduling Approach
Pose constrained discrete optimization problem as aconstrained binary programmingApproximate computation of predicted tracker error
Linearize measurement model about predicted state(e.g. Extended Kalman Filter)Inverse of error covariance matrix (constraint function) islinear in binary control variables (1 if mote is used, 0 ismote is not used)Error is polynomial function of control variables
Binary programming for sensor schedulingNatural framework for on/off scheduling problemsLinear programming relaxation combined with Branch &Bound algorithm (existing software)Typically avoids significant enumeration of solution space

Sensor Costs: Energy Model
Packet Transmit Energy
Packet Receive Energy
Sensor Circuitry Energy
Processing Energy

Simulations and Results
Sensor field 100 m x 100 m
400 randomly placed acoustic sensors
Maximum sensors scheduled: 70
Energy use adopted from MICA2 datasheet
Target velocity: (3, -3) m/s
Target travels for 35 time steps of 1 s each
4,000 particles used in particle filter
Error threshold: 0.1 m2 to 0.6 m2

Tracking Performance
MC = true SE averaged over MC simulationsPred = SE predicted by schedulerPF = SE approximated by particle filterError threshold is 0.3 m2

Tracking Performance
Average number of sensors activated versus error threshold

Tracking Performance
Average energy consumption versus error threshold

Tracking Performance
Average run time versus error threshold

Conclusions: Sensor Scheduling
Sensor scheduling: Integral part of sensor signalprocessing:
Intelligent allocation of sensing resourcesReduce cost consumption of sensors
Sensor scheduling effective when:Scheduling formulation is amenable to optimizationNeed to exploit structure of the problem
Binary programming for sensor scheduling is a naturalframework for on/off scheduling problems that avoidssignificant enumeration of solution space