-
8/17/2019 Dynamics Ppt
1/52
1
Dynamics of viscously
damped linear MDOF systems
Dr C S ManoharDepartment of Civil Engineering
Professor of Structural Engineering
Indian Institute of Science
Bangalore 560 012 India
[email protected]
mailto:[email protected]:[email protected]
-
8/17/2019 Dynamics Ppt
2/52
2
Topics
Nature of equations of motion and uncoupling
Classical and non - classical damping models
Input - output relations in time domainInput - output relations
in frequency domain
Forced vibration analysis using modal expansion
-
8/17/2019 Dynamics Ppt
3/52
3
A rigid bar supported on two springs
1 1 1 2 2
2
O : Elastic centre
O : Centre of gravity
k L k L
Two DOF-s
1 Translation
1 Rotation
1 2 1 2l l L L L
-
8/17/2019 Dynamics Ppt
4/52
4
1 1 2 2
2 2 2 1 1 1
1 2 1 1 2 2
2 2
1 1 2 2 1 1 2 2
0
0
00
0
my k y l k y l
I k y l l k y l l
k k k l k l m y y
k l k l k l k l I
is diagonal and is non-diagonal M K
Static coupling
-
8/17/2019 Dynamics Ppt
5/52
5
1 2
2 2
1 1 2 2
00
0
k k m me z z
k L k Lme m
is non-diagonal and is diagonal M K
Inertial coupling
-
8/17/2019 Dynamics Ppt
6/52
6
1 1 2 2
2
1 2 2
0m ml k k k L x x
ml m k L k L
is non-diagonal and is non-diagonal M K
Static and inertial coupling
-
8/17/2019 Dynamics Ppt
7/52
7
Remarks
•Equations of motion for MDOF systems are generally
coupled
•Coupling between co-ordinates is manifest in the form of
structural matrices being nondiagonal
•Coupling is not an intrinsic property of a vibrating
system.
It is dependent upon the choice of the coordinate system.
This choice itself is arbitrary.
•Equations of motion are not unique.
They depend upon the choice of coordinate system.
-
8/17/2019 Dynamics Ppt
8/52
8
Remarks (continued)
•The best choice of coordinate system is the one
in which the coupling is absent. That is, the structural
matrices are all diagonal.
•These coordinates are called the natural coordinates
for the system. Determination of these coordinates for
a given system constitutes a major theme in structural
dynamics. Theory of ODEs and linear algebra help us.
-
8/17/2019 Dynamics Ppt
9/52
9
0 00 ; 0
, and , in general, are non-diagonal
Equations are coupledSuppose we introduce a new set of
dependent
variables ( ) using the transformation
( )where is a tra
MX CX KX F t X X X X
M C K
Z t
X t TZ t T n n
nsformaiton matrix, to be
selected.
How to uncouple equations of motion?
-
8/17/2019 Dynamics Ppt
10/52
10
0 00 ; 0
( )( )
( )
( )
, ,& structural matrices in the new coordinate system.
( ) force vector in the new coord
t t t t
MX CX KX F t
X X X X
X t TZ t MTZ t CTZ t KTZ t F t
T MTZ t T CTZ t T KTZ t T F t
MZ t CZ t KZ t F t
M C K
F t
inate system
Can we select such that , ,& are all ?
If yes, equation for ( ) would then represent a set of
uncoupled
equations and hence can be solved easily.
T M C K
Z t
Question
DIAGONAL
-
8/17/2019 Dynamics Ppt
11/52
11
How to select to achieve this?T
Consider the seemingly unrelated problem of
undamped free vibration analysis
0
Seek a special solution to this set of equations in which
all points on the sturcutre oscillate harmonically at thesa
MX KX
2
2
me frequency.
That is
exp ; 1,2, ,
or, exp where is a 1 vector.
exp & exp
exp 0
k k x t r i t k n
X t R i t R n
X t i R i t X t R i t
MR KR i t
-
8/17/2019 Dynamics Ppt
12/52
12
2
2
2
exp 0
0
This is a algebraic eigenvalue problem.
;
is positive semi-definite
is positive definite
Eigensolutions would be real valued
and eigenvalues w
t t
MR KR i t
RM KR
KR MR
K K M M
K
M
Note
ould be non-negative.
-
8/17/2019 Dynamics Ppt
13/52
13
2
2
12
12 2
12
12
0
Let exist.
0
0 0
If exists, =0 is the solution.
Condition for existence of nontrivial solution is that
should not exist
KR MR
K M R
K M
K M K M R
IR R
K M R
K M
2
2 2 2
1 2
1 2
.
0
This is called the characteristic equaiton.
This leads to the characteristic values
and associated eigenvectors
, , , .
n
n
K M
R R R
-
8/17/2019 Dynamics Ppt
14/52
14
2
2
2
Consider - th and -th eigenpairs.
(1)
(2)
(1)
(3)
(2)
r r r
s s s
t
s
t t
s r r s r
t
r
t
r s s
r s
KR MR
KR MR
R
R KR R MR
R R KR
Orthogonaility property of eigenvectors
2
2
2
2 2
(4)
Transpose both sides of equation (4)
Since & , we get
(5)
Substract (3) and (5)
0
t
r s
t t t t
s r s s r
t t
t t
s r s s r
t
r s s r
R MR
R K R R M R
K K M M
R KR R MR
R MR
0
0
t s r
t
s r
R MR r s
R KR r s
2
Normalization
1t
s s
t s s s
R MR
R KR
-
8/17/2019 Dynamics Ppt
15/52
15
21 ( )
2 2 2
1 2
Introduce
Diag
nn n
n
R R R
t
t
M I
K
Orthogonality relations
Select T
-
8/17/2019 Dynamics Ppt
16/52
16
0 0
2
0 ; 0
( )( )
( )
( )
; 1, 2, ,
How about initial conditions?(0) 0
(0) 0 0
0 (0) & 0 (0)
t t t
r r r r
t t
t t
MX KX F t
X X X X
X t Z t M Z t K Z t F t
M Z t K Z t F t
IZ t Z t F t
z z f t r n
X Z
MX M Z Z
Z MX Z MX
Consider
Undamped
Forced
Vibration Analysis
-
8/17/2019 Dynamics Ppt
17/52
17
0
1
1 0
0 10 cos sin sin
010 cos sin sin
t r
r r r r r r
r r
n
k kr r
r
t n
r kr r r r r r
r r r
z z t z t t t f d
X t Z t
x t z t
z z t t t f d
-
8/17/2019 Dynamics Ppt
18/52
18
0 00 ; 0
( )
( )
( )
( )
If is not a diagonal matrix, the
equations
t t t t
t
t
MX CX KX F t
X X X X
X t Z t
M Z t C Z t K Z t F t
M Z t C Z t K Z t F t
IZ t C Z t Z t F t
C
How about damped forced response analysis?
of motion would still remain coupled.
-
8/17/2019 Dynamics Ppt
19/52
19
If the damping matrix is such that
is a diagonal matrix, then equaitons would
get uncoupled.
Such matrices are called classical damping matrices.
Rayleigh's proport
t
C
C
C
Classical damping models
Example
ional damping matrix
t t t
C M K
C M K
I
-
8/17/2019 Dynamics Ppt
20/52
20
2
2
[ ]
[ ] [ ]
2 2
T T
T T
i
n n
nn
n
C M K
C M K
I K
I Diag
c
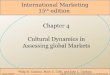
•Rayleigh damping model imposes prescribed variations
•on modal damping values as function of the mode count
•There are only two free parameters.
•These parameters can be determined using known values of
damping ratios
•
for two modes.
-
8/17/2019 Dynamics Ppt
21/52
21
100
101
102
103
10-4
10-3
10-2
10-1
100
frequency rad/s
e t a
mass and stiffness proportional
stiffness proportional
mass proportional
-
8/17/2019 Dynamics Ppt
22/52
22
2
0
( )
0 (0) & 0 (0)
2 ; 1,2, ,
with 0 & 0 specified.
exp cos sin
1 exp
t
t t
r r r r r r r
r r
r r r r dr r dr
t
r r r
dr
IZ t C Z t Z t F t
Z MX Z MX
z z z f t r n
z z
z t t a t b t
t f d
-
8/17/2019 Dynamics Ppt
23/52
23
0
1
1 0
1exp cos sin exp
1exp cos sin exp
1,2, ,
t
r r r r dr r dr r r r
dr
n
k kr r r
t n
kr r r r dr r dr r r r
r dr
z t t a t b t t f d
X t Z t
x t z t
t a t b t t f d
k n
-
8/17/2019 Dynamics Ppt
24/52
24
MDOF system with -th dof driven by an unit harmonic
force s
exp0 0 1 0 0
MX CX KX F i t F
th entry s
response of the -th coordinate due tounit harmonic driving
at -th coordinate.
rs X t r
s
lim ?rst
X t
-
8/17/2019 Dynamics Ppt
25/52
25
0
0
2
0
2
0 0 0
2
0
2
0
exp
0 0 1 0 0
lim exp
exp
exp
exp exp exp exp
exp exp
t
MX CX KX F i t
F
X t X i t
X t X i i t
X t X i t
MX i t CX i i t KX i t F i t
M i C K X i t F i t
M i C K X F
-
8/17/2019 Dynamics Ppt
26/52
26
2
0
0 0
2
0
2
0
2
0
2
0
exp exp
&
is classical (Diagonal) with 2
t t
t
nn n n
t t
t t t t
t
M i C K X F
X t X i t Z i t
M I K
C C
M i C K Z F
M i C K Z F
M i C K Z F
I i Z F
Diagonal
-
8/17/2019 Dynamics Ppt
27/52
27
2
0
1 1
0 2 2 2 2
0 2 2
0 0
1
2 21
2 2
Recall
0 0 1 0 0 ( -th entry=1; rest=0)
2
lim exp exp
2
t
N N t
nk k kn k
k k
nn n n n n n
sn
n
n n n
N
r rn nt
n
N rn sn
n n n n
I i Z F
F F
Z i i
F s
Z i
X t Z i t X t Z i t
i
2 2
1
exp
exp
2
rs rs
N rn sn
rs
n n n n
i t
X t H i t
H
i
N
-
8/17/2019 Dynamics Ppt
28/52
28
2 21
2 21
12
2 21
exp2
2
is symmetric but not Hermitian
2
N rn sn
rs
n n n n
N
rn snrs
n n n n
rs sr
rs sr
rs
N rn sn
n n n n
X t i t i
H i
X t X t H H
H H
H
H M i C k i
Remarks
-
8/17/2019 Dynamics Ppt
29/52
29
*
12
2 21
Conceptually simple
Computationally difficult to implement
2
Computationally easier to implement
Not al
N N rn sn
n n n n
H M i C k
H i
l modes need to be included
(Nor it is advisable to include all modes)
-
8/17/2019 Dynamics Ppt
30/52
30
MDOF system with -th dof driven by an unit impulse
force s
0 0; 0 0
0 0 1 0 0
MX CX KX F t
X X
F
th entry s
response of the -th coordinate due to
unit impulse driving at -th coordinate.
rs X t r
s
-
8/17/2019 Dynamics Ppt
31/52
31
0 0 1 0 0
&
is classical (Diagonal) with 2
t t
t
nn n n
t t t t
t
MX CX KX F t
F
X t Z t
M I K
C C
M Z t C Z t K Z t F t
M Z t C Z t K Z t F t
IZ Z Z F t
-
8/17/2019 Dynamics Ppt
32/52
32
2
1
1
1
2
0 0; 0 0
exp sin
1exp sin
t
N
n n n n n n jn j ns
j
n n
snn ns n n n dn
dn
N
r rn n
n
N
rs rn sn n n dn
n dn
IZ Z Z F t
z z z F t t
z z
z t h t t t
X Z
X t z t
h t t t
1N
-
8/17/2019 Dynamics Ppt
33/52
33
1
1exp sin
Remarks
Matrix of impulse response functions
Not all modes need to be included in the summation
If an arbitrary load
N
r rs rn sn n n dn
n dn
rs sr
rs
t
s
X t h t t t
h t h t
h t h t
h t h t
f
0
10
is applied at the -th dof (instead of
unit impulse excitation)
1exp sin
t
rs rs s
t N
s rn sn n n dn
n dn
s
X t h t f d
f t t d
-
8/17/2019 Dynamics Ppt
34/52
34
2
2 1 1
Are & the only two orthogonality relations?
.
Consider
(It may be noted that is the flexibility matrix)
Pre-multiply both
t t
n n n
n n n
M I K
K M
I K M K
More on orthogonality relat
N
ions
o
2 1
1
2 1
1
1 2 1 1
1 1
sides by
0 for
is orthogonal to .
Consider
Pre-multiply both sides by
0 foris orthogonal to
thi
t
k
t t
k n n k n
n n n
t
k
t t
k n n k n
M
M MK M n k
MK M
I K M
MK M
MK M MK MK M n k MK MK M
s leads to an infinite family of orthogonality relations.
-
8/17/2019 Dynamics Ppt
35/52
35
2
1
2
1
2
1
1
2
1
1
Consider
1
Pre-multiply both sides by
1 0 for
is orthogonal to
1Consider
Pre-multiply both sides by
n n n
n n
n
t
k
t t
k n k n
n
n n
n
t
k
t
k
M K
I M K
K
K KM K n k
KM K
I M K
KM K
KM
nd2 family
1 1
2
1 1
1 0 for
is orthogonal to
this leads to an infinite family of orthogonality relations.
t
n k n
n
K KM KM K n k
KM KM K
-
8/17/2019 Dynamics Ppt
36/52
36
matrix satisfies two infinite families of orthogonality
relations
with & being two special cases of these
family of orthgonality relations.
t t M I K
1 1 1
1 2 3
1 1 1
1 2 3
Do these additional orthogonality relations help is modeling
damping better?
: Rayleigh's damping model
C=
By virtue of d
C M K
M MK M MK MK M
K KM K KM KM K
Yes.
RecallGeneralization
iscussions in the preceding slides,
would be diagonal.
t C
-
8/17/2019 Dynamics Ppt
37/52
37
The generalization admits as many free parameters as is neededto
model damping. This number can match the number of modes for
which damping ratio is known.
In fact, damping can be specified i
Remarks
ndependently for all the modes
without worrying about the underlying matrix. Thus, for
example,we can say that damping is 5% for all modes. A C matirx can
be derived,
if needed, consistent with this
C
information, using generalized Rayleigh
damping model.
N
-
8/17/2019 Dynamics Ppt
38/52
38
1
1
1
1 1
1
1 1
1
Diagonal 2
Naive approach: C=
More helpful approach:
Similarly
N
i i
t
i i
t
t t
t
t t t
t
t
C
M I M
M
M
M
C M M
Determination of a classical matrix given
This can be used even when all modes are
not included in the analysis (which invariably is the case).
-
8/17/2019 Dynamics Ppt
39/52
39
Damping depends upon material, details of joints and
supports.
Energy disspated in a cycle when a structure is oscillating
harmonical
Modal damping when the sturcture is
made up of different materials
ly
is proportional to KE (or PE) in a cycle
(Excercise: show this for a sdof system).
Consider a structure that is oscillating in its -th mode. Let
the structure
be made up of s number of mat
n
erials (e.g., RCC, steel, soil,...).
Let damping ratio for -th material in the -th mode.
(e.g., RCC~5%, steel ~2%, soil~10%).
Let equivalent damping ratio for the structure in the -th
mode
n
r
n
eq
r n
n
.
Let total KE (or PE) stored in structral parts made up of r-th
material
in the -th mode.
n
r E
n
-
8/17/2019 Dynamics Ppt
40/52
40
1
1
can be computed based on undamped normal mode shapes.
sn n
r r n r eq s
nr
r
n
r
E
E
E
-
8/17/2019 Dynamics Ppt
41/52
41
What happens if is not diagonal?t C
0 0; 0 ; 0
The matrix does not uncouple this set of equations.
We augment the above equation by the identity - 0
and write
- 0
0 - 0
0
MX CX KX F t X X X X
MX MX
MX CX KX F t
MX MX
M M X
M C K X
2 2 2 2 2 12 1
0
Introduce
00 - 0; ; ;
0 N N N N N N
X
F t X
M M X y A B p t
F t M C K X
A
-
8/17/2019 Dynamics Ppt
42/52
42
is the new 2 1 response vector (state vector)
and B are the new structural matrices of size 2 2
and are symmetric ;
and are not positive defninite
and B are in gene
t t
Ay By p t
y t N
A N N
A B A A B B
A B
A
ral non-diagonal equations are coupled.
: Transform
2 2 transformation matrix to be selected such that
the transformation would uncouple the above equations of
motion.
y Tz
T N N
y Tz ATz BTz p t
T
Strategy
(equations in the transformed coordinate system)
Aspiration: to select such that and are both diagonal so
that
represents a set of 2 uncoupled equations wh
t t t ATz T BTz T p t q t
Az Bz q t
T A B
Az Bz q t N
ich can
be solved easily.
Ay By p t
-
8/17/2019 Dynamics Ppt
43/52
43
: Determine T by determining the
eigensolutions associated with and matrices.
Free vibration analysis
0
Seek solutions of the form exp( )
exp( ) exp( ) 0
The
Ay By p t
A B
Ay By
y t R t
AR t BR t
BR AR
Strategy
required transofrmation matrix would be obtained by
solving
this eigenvalue problem.
0
For nontrivial soutions the inverse of must not exist
characteristic equation 0
B A R
B A
B A
If is an eigenpair we haveR
-
8/17/2019 Dynamics Ppt
44/52
44
* * * * *
* *
1
If , is an eigenpair we have
Taking conjugation on both sides we get
Note: and are real valued and &
If , is an eigenpair, , is also an eigenpair
Eigenvalues: ,
R
BR AR
BR AR A B A A B B
R R
* * *
2 1 2
* * *
1 2 1 2
, , , , , ,
Eigenvectors: , , , , , , ,
Recall
if exp exp
exp
N N
N N R R R R R R
X y X t t X t t X
y t R
Orthogonality relations
-
8/17/2019 Dynamics Ppt
45/52
45
Consider the th and th eigenpairs , & ,
Transpose both sides of the first of the above equations
S
m m n n
m m m
n n n
t t
n m m n m
t t
m n n m n
t t t t
m n m m n
m n R R
BR AR
BR AR
R BR R AR
R BR R AR
R B R R A R
Orthogonality relations
ince &
Subtracting the above equations, we get 0
0 & 0
t t t t
m n m m n
t t
m n m m n
t t
m n n m n
t
m n m n
t t
m n m n
A A B B R BR R AR
R BR R AR
R BR R AR
R AR
R AR m n R BR m n
-
8/17/2019 Dynamics Ppt
46/52
46
* * *1 2 1 2
* * * * * *
1 1 2 2 1 1 2 2
* * *
1 2 1 2
1
2
1 2
* *
Define the modal matrix
=
Let
0 0
0 0
= &
0
k k
k
k
N N
N N N N
N N
N
N
R R
R R R R R R
-
8/17/2019 Dynamics Ppt
47/52
47
* * *
1 2 1 2
1 1 2
We have
0 & 0
Select the normalization constant such that
1 so that .
We also have
Define the modal matrix
=
t t
m n m n
t t
n n n n n
k k
k
k
N N
R AR m n R BR m n
R AR R BR
R R
R R R R R R
* * * * * *
2 1 1 2 2
* * *
1 2 1 2
N N N N
N N
-
8/17/2019 Dynamics Ppt
48/52
48
1
2
1 2
* *
*
*
0 0
0 0Let = &
0
The orthogonality relations can now be written as
0
0
Use the transformation matirx .
N
N
t
t
A I
B
T
-
8/17/2019 Dynamics Ppt
49/52
49
0
*
*
; 0
Transform
By virtue of orthogonality relations we have
0&
0
0
0
This represents a set of
t t t
t t
Ay By p t y y
y z
A z B z p t
A z B z p t q t
A I B
I z z q t
Forced response analysis
2 uncoupled first order equations.
Missions accomplished!
N
-
8/17/2019 Dynamics Ppt
50/52
50
* *
* *
* * * *
* *
00
0
Let
00
0
( )
( )Initial conditions
0 0 0 0
t
t t
t t
t
t
t
I z z F t
u z
v
u u
F t v v
u u F t
v v F t
y z z Ay
Response when -th dof is driven by a unit harmonic
excitationr
-
8/17/2019 Dynamics Ppt
51/52
51
* *
1
* * *
1
0 0 1 -th dof 1 exp
( )
( )
( ) exp ; 1,2, ,
( ) exp ; 1,2, ,
li
t
t
t
N
j j j nj jr
n
N
j j j nj jr
n
F t r i t
u u F t
v v F t
u u F t i t j N
v v F t i t j N
*
*
* **
*
* *
*
*
1 1
exp expm & lim
lim exp
jr jr
j jt t
j j
N N kj jr kj jr
k kj j kj j k t
j j j j
i t i t u t v t
i i
x u x t u v
x v
x t u t v t x t i t
i i
-
8/17/2019 Dynamics Ppt
52/52
52
* *
*1
* *
*1
lim exp exp
Frequency response function
N kj jr kj jr
k kr t
j j j
N kj jr kj jr
kr
j j j
x t i t i t i i
i i

![[PPT]Group Dynamics - Western Illinois Universityfaculty.wiu.edu/J-Dobson/349GroupDynamics.ppt · Web viewGroup Dynamics Lecture #13 Social Psychology One of the roots of OB Social](https://img.pdfslide.net/doc/110x75/5abaed817f8b9ad1768c1fba/pptgroup-dynamics-western-illinois-viewgroup-dynamics-lecture-13-social-psychology.jpg)




![[PPT]The Critique: Group Communication · Web viewThe Critique: Group Communication Dynamics So what do we look for? What is there to see in a group? Elements of Group Dynamics Communication](https://img.pdfslide.net/doc/110x75/5abaed817f8b9ad1768c1fc9/pptthe-critique-group-communication-viewthe-critique-group-communication-dynamics.jpg)
![[PPT] Session code: - An adventure in Microsoft Dynamics 365 ... · Web viewITD03 Extending Dynamics NAV using .NET framework interoperability Erik Hougaard # NAVUGSummit Notes to](https://img.pdfslide.net/doc/110x75/611c523f5f16f5693274a9c7/ppt-session-code-an-adventure-in-microsoft-dynamics-365-web-view-itd03.jpg)





![[PPT]Computational Fluid Dynamics: An Introductionuser.engineering.uiowa.edu/~fluids/posting/home/CFD/CFD... · Web viewIntroduction to Computational Fluid Dynamics (CFD) Maysam Mousaviraad,](https://img.pdfslide.net/doc/110x75/5aedbf837f8b9a90319017cb/pptcomputational-fluid-dynamics-an-fluidspostinghomecfdcfdweb-viewintroduction.jpg)


![Business Dynamics Simulator for Startups and SMEs [ppt; © Sinisa Sovilj]](https://img.pdfslide.net/doc/110x75/55c39d29bb61eb023b8b4628/business-dynamics-simulator-for-startups-and-smes-ppt-sinisa-sovilj.jpg)









![Group Dynamics-Final Ppt[2]](https://img.pdfslide.net/doc/110x75/543e7949afaf9f255e8b464e/group-dynamics-final-ppt2.jpg)

