Embed Size (px)
Citation preview

E-Gesture: A Collaborative Architecturefor Energy-efficient Gesture Recognition
with Hand-worn Sensor and Mobile Devices
Taiwoo Park1, Jinwon Lee1, Inseok Hwang1,Chungkuk Yoo1, Lama Nachman2, Junehwa Song1
KAIST1, Intel Corporation2
ACM SenSys 2011

Hand Gesture-Based Mobile Interaction

Smartphone
Mobile Gesture Interaction Framework
Hand-worn Sensors
…
Applications
Motion Sensor(s)

Design Challenges
• Providing Energy-efficient Gesture Processing
• Accurately Detecting and Classifying Hand Gestures
Mobility Noises
(Segmenting)

Design Challenges
• Providing Energy-efficient Gesture Processing
• Accurately Detecting and Classifying Hand Gestures
Mobility Noises
20hrs Sensor, 250mAh
24hrs 17hrs Smartphone
Over 90% False detections
Only 70% Classification
(Segmenting)
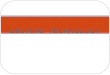
Design Challenges
• Providing Energy-efficient Gesture Processing
• Accurately Detecting and Classifying Hand Gestures
Mobility Noises
20hrs Sensor, 250mAh
24hrs 17hrs Smartphone
Over 90% False detections
Only 70% Classification
(Segmenting)

E-Gesture ArchitectureWristwatch Device Smartphone
① Sensing ② Detection ③ Classification ④ Notification(Segmentation)
1
2
3
4

Collaboration between devicesDetection on wristwatch, classification on smartphone
Collaboration between sensorsAccel triggers gyro for energy efficiencyGyro adapts accel to mobility changes
Why ‘collaborative’?

Approaches
• Investigated characteristics of Accel and Gyro– Accelerometer: Mobility-Sensitive, Energy-Efficient– Gyroscope: Mobility-Robust, Energy-Hungry
• Designed energy-efficient, mobility-robust gesture detection architecture– Triggering Gyroscope by analyzing Accelerometer Signal– Adjusting Accelerometer sensitivity by Gyroscope Validation
• Suggested two gesture classification architectures considering users’ mobilities (based on HMM)
(threshold)

Approaches
• Investigated characteristics of Accel and Gyro– Accelerometer: Mobility-Sensitive, Energy-Efficient– Gyroscope: Mobility-Robust, Energy-Hungry
• Designed energy-efficient, mobility-robust gesture detection architecture– Triggering Gyroscope by analyzing Accelerometer Signal– Adjusting Accelerometer sensitivity by Gyroscope Validation
• Suggested two gesture classification architectures considering users’ mobilities (based on HMM)
(threshold)

Approaches
• Investigated characteristics of Accel and Gyro– Accelerometer: Mobility-Sensitive, Energy-Efficient– Gyroscope: Mobility-Robust, Energy-Hungry
• Designed energy-efficient, mobility-robust gesture detection architecture– Triggering Gyroscope by analyzing Accelerometer Signal– Adjusting Accelerometer sensitivity by Gyroscope Validation
• Suggested two gesture classification architectures considering users’ mobilities (based on HMM)
(threshold)

Energy-Performance Tradeoff of Accel and Gyro
Energy Consumption
Mobility Robustness
Segmentation Accuracy
Accel-based Low Poor PassableGyro-based High (9x accel) Good Good

Example of Mobility Noises
Standing still Walking Running

Waveform of real mobile gesture
Accel
Gyro
RMS offorce
Waveform of ‘Touching ear’ while running
RMS ofrotation
Mobility Noise

Accel threshold should fit to mobility
Lower fixed threshold False-positiveson high mobility
Higher fixed threshold False-negativeson low mobility

Mobility Situation
RIDE STAND WALK RUN
Accel-based 0.15G 0.15G 0.2G 0.35G
Gyro-based 25 degree/sec
Optimal threshold for Accel and Gyro(minimizes FPs without incurring FNs)
False-Positives per mobility with optimal threshold

However gyroscope is energy-hungry..
Sensor-side Energy Profile(Atmega128L, CC2420, Accel and Gyro)
AccelGyroscope

However gyroscope is energy-hungry..
Accel Gyro Accel and Gyro arecomplementary
in terms ofperformanceand energy

Approaches
• Investigated characteristics of Accel and Gyro– Accelerometer: Mobility-Sensitive, Energy-Efficient– Gyroscope: Mobility-Robust, Energy-Hungry
• Designed energy-efficient, mobility-robust gesture detection architecture– Triggering Gyroscope by analyzing Accelerometer Signal– Adjusting Accelerometer threshold by Gyroscope Validation
• Suggested two gesture classification architectures considering users’ mobilities (based on HMM)
(threshold)

Closed-loop Collaborative Segmentation
Gyro-basedDetector
Gyro-based Detector
Accurate, High energy

Closed-loop Collaborative Segmentation
Gyro-basedDetector
Trigger Gyro-basedDetector
Accel-basedDetector
Gyro-based Detector
Open-loop Detector
Accurate, High energy

Closed-loop Collaborative Segmentation
Gyro-basedDetector
Trigger Gyro-basedDetector
Accel-basedDetector
Gyro-based Detector
Open-loop Detector
Accurate, High energy
Accurate, High energy(because of mobility)

Closed-loop Collaborative Segmentation
Accurate,Low energy
Trigger Gyro-basedDetector
Accel-basedDetector
Feedback
Closed-loop Collaborative Detector

Closed-loop Collaborative Segmentation
Accurate,Low energy
Trigger Gyro-basedDetector
Accel-basedDetector
Feedback
Closed-loop Collaborative Detector
Performance-preserving, Energy-saving Collaborative Sensor Fusion

Approaches
• Investigated characteristics of Accel and Gyro– Accelerometer: Mobility-Sensitive, Energy-Efficient– Gyroscope: Mobility-Robust, Energy-Hungry
• Designed energy-efficient, mobility-robust gesture detection architecture– Triggering Gyroscope by analyzing Accelerometer Signal– Adjusting Accelerometer sensitivity by Gyroscope Validation
• Suggested two gesture classification models considering users’ mobilities (based on HMM)
(threshold)

Basic HMM• Trained with samples collected in stationary setting• Classification accuracy drops in mobile situation
Model for Gesture A
Model for Gesture B
Model for Garbages
Gesture Candidate
Sample
Gesture A orGesture B or
… orGarbage
Raw, Delta, Integral(18 features)
Probabilities
…
8-state left-right HMMs

Basic HMM• Trained with samples collected in stationary setting• Classification accuracy drops in mobile situation
Model for Gesture A
Model for Gesture B
Model for Garbages
CandidateGesture Sample
Gesture A orGesture B or
… orGarbage
Raw, Delta, Integral(18 features)
Probabilities
…
Design alternatives:1) Adapt models to mobility changes (in run-time)
2) Train several different models forpredefined set of mobility situations
8-state left-right HMMs

Adaptive HMM• Update the models with gesture samples
– Negative update scheme of uWave [PerCom09]– By MLLR (Maximum Likelihood Linear Regression) adaptation
On-line adaptationwith users’ gesture samples
Model for Gesture A
Model for Gesture B
Model for Garbages
CandidateGesture Sample
Gesture A orGesture B or
… orGarbage
…
Wrong!!!
Raw, Delta, Integral(18 features)
Probabilities
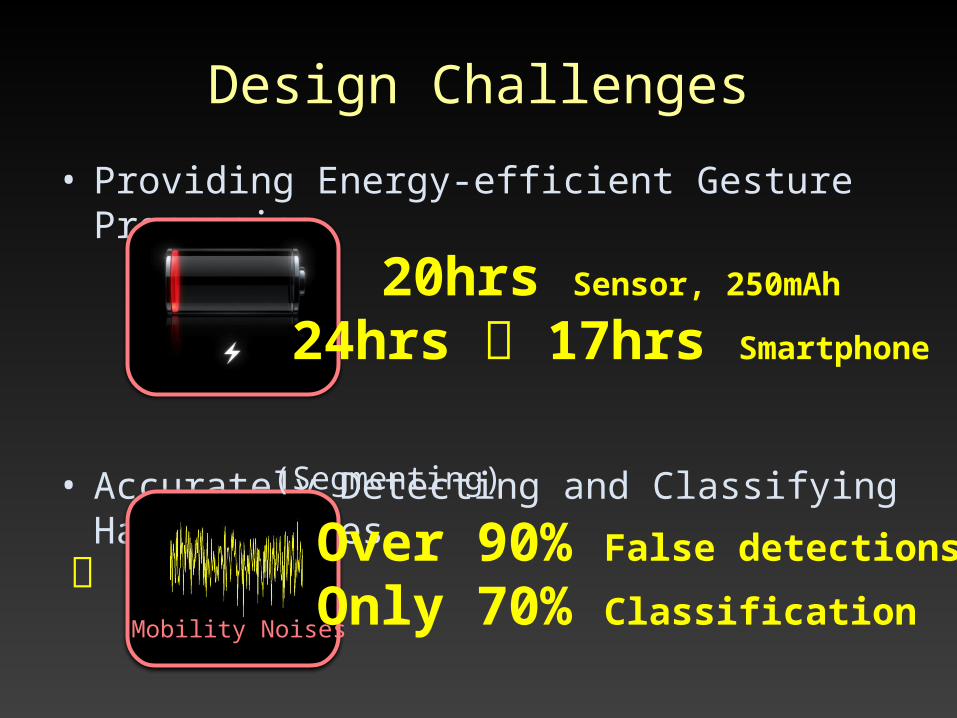
Multi-Situation HMM• Train models separately for representative mobility
situations– e.g. Riding a car, Standing, Walking, Running
• Classify by evaluating all models
CandidateGesture Sample
Gesture A orGesture B or
… orGarbage
Model for Gesture AModel for Gesture B
Model for Garbages
…Model for Gesture AModel for Gesture B…
Model for Gesture AModel for Gesture B…
Trained for RIDE
Trained for STAND
Trained for WALK
𝑁𝑢𝑚𝑏𝑒𝑟 𝑜𝑓 𝑚𝑜𝑑𝑒𝑙𝑠=𝑁𝑢𝑚𝑏𝑒𝑟 𝑜𝑓 𝑠𝑖𝑡𝑢𝑎𝑡𝑖𝑜𝑛𝑠×𝑁𝑢𝑚𝑏𝑒𝑟 𝑜𝑓 𝑔𝑒𝑠𝑡𝑢𝑟𝑒𝑠
Raw, Delta, Integral(18 features)
Probabilities

Brief Comparison betweenClassification Architectures
Basic Adaptive Multi-Situa-tion
Adaptation cost(Users’ burden) none large none
Training cost # of gestures # of gestures# of gestures x
# of mobile situations
Evaluation cost(Processing) # of gestures # of gestures
# of gestures x# of mobile situations

Brief Comparison betweenClassification Architectures
Basic Adaptive Multi-Situa-tion
Adaptation cost(Users’ burden) none large none
Training cost # of gestures # of gestures# of gestures x
# of mobile situations
Evaluation cost(Processing) # of gestures # of gestures
# of gestures x# of mobile situations

IMPLEMENTATION
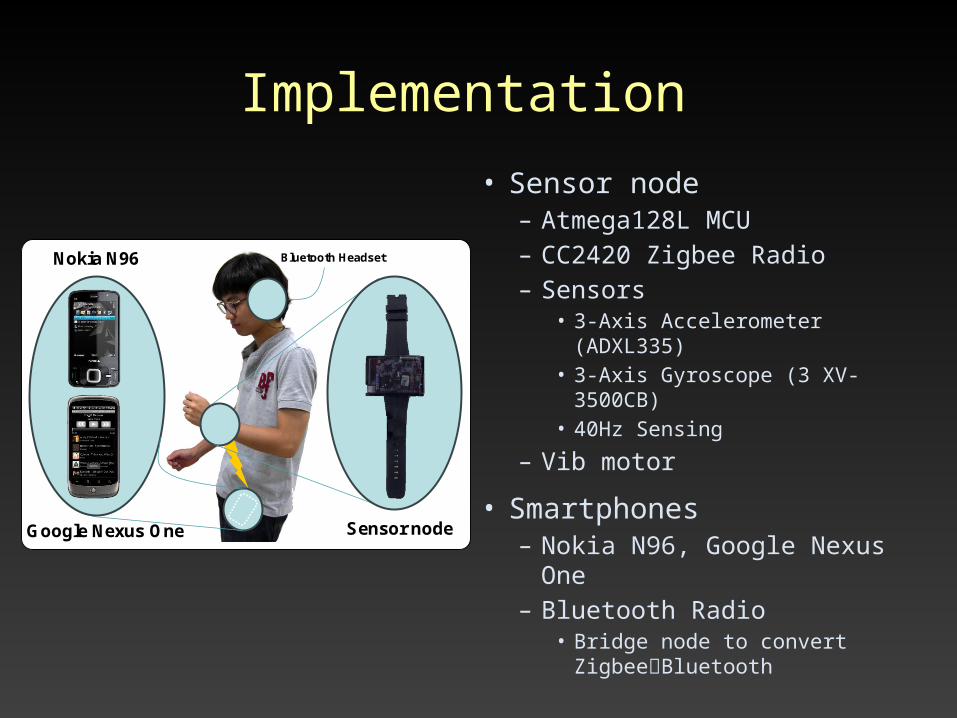
• Sensor node– Atmega128L MCU– CC2420 Zigbee Radio– Sensors
• 3-Axis Accelerometer (ADXL335)• 3-Axis Gyroscope (3 XV-3500CB)• 40Hz Sensing
– Vib motor
• Smartphones– Nokia N96, Google Nexus One– Bluetooth Radio
• Bridge node to convert ZigbeeBluetooth
Implementation
Google Nexus One Sensor node
Nokia N96 Bluetooth Headset
Implementation• Ported HTK to Mobile OSs
– Google Android 2.1 with NDK rev.3– Nokia S60 3.2.0 with Open C++ library
• Application interface– Helps application developers easily define and develop gesture UIs

Sample Applications
• Swan Boat [Ubicomp09][MM09][ACE09]– Collaborative boat-racing exertion game– Utilizes hand gestures as additional game input
• Punching together, flapping together
• Mobile Music Player, Phone Call Manager– Featuring eye-free, touch-free controls– User can control the application by hand gestures
Hand-worn Sensors

EVALUATION
Gesture Data WorkloadThreshold(Sensitivity) AdaptationEnergy EfficiencyClassification Accuracy

Gesture Data Workload• 4 Representative mobility situations
– Riding a car, Standing, Walking, Running
• 8 Intuitive gestures
• Data Collection– 4 situations × 8 gestures × 30 samples × 7 participants
= Collected 6720 gesture samples in total– Also collected non-gestures to generate test workloads
• Workload configuration (for energy efficiency)– Ratio of gestures: 10% of total time– Mobility mixture: 75% from stationary (50% STAND, 25% RIDE)
25% from mobile (12.5% WALK, 12.5% RUN)
1
23 Earpose (12)Laydown (21)Throw (13)Draw (31)Leftflick (11)Rightflick (11)
Leftknob
Rightknob

Higher Threshold in Higher Mobility
Lower Threshold in Lower Mobility
Threshold adaptation ofClosed-loop detector
Q: Does the closed-loop collaborative detector adapt accelerometer threshold well?

Performance of Closed-loop Detector
False positivesfrom
accel detector
False negativesfrom
accel detector
Q: How much does the closed-loop detectorsuppress false-positives and false-negatives
from the accel-based detector?

Next two questions:
• How much energy does the E-Gesture save?– Sensor– Smartphone
• Does the suggested classification models provide sufficient accuracy for user interaction?

Sensor-side Energy Savings fromClosed-loop Architecture
46mW
39mW (↓15%)
19mW (↓59%)
59% less energy consumption, 2.4x longer lifetime
250mAhLi-ion
Battery
transmitraw sensing data:
20 hrstransmit only
detected gestures(no sensor control)23.7 hrs (1.2x)transmit only
detected gestures (closed-loop detection):
48.7 hrs (2.4x)Energy Consumption

Mobile-side Energy Savings from Sensor-side gesture detection
All processing on mobile:42.1hrs
Sensor-side Gesture Detection:
74hrs (1.8x)
122mW
70mW(↓43%)
1400mAhLi-ion
Battery
3G/WiFi on
Energy Consumption

Gesture Classification Performance
AdaptationCost
4xGestureModels
(Precision)

Conclusion• A mobile gestural interaction platform
• A collaborative gesture interaction architecture– Collaborative sensor-mobile gesture data processing
• 1.8x longer battery lifetime for Smartphone
– Closed-loop collaborative sensor-side segmentation• 2.4x longer battery lifetime for Hand-worn Sensor
+ preserving gyroscope’s detection performance
• Experiments under different representative mobile situations– Up to 94.6% of classification accuracy on mobile usage
by mobility-considered classification architecture design
Thanks! Questions?


Conclusion
• 2.4x longer battery lifetime for Hand-worn Sensor+ preserving gyroscope’s detection performance
by sensor-wise collaboration• 1.8x longer battery lifetime for Smartphone
by device-wise collaboration• Up to 94.6% of classification accuracy on mobile usage
by mobility-considered classification architecture design
Achievements:
• Opportunities for further energy savings– Early filtering on sensor devices
• Improvement on classification architecture
Future Work:

Accuracy breakdown by mobility situation

• Sensor node– Atmega128L MCU– CC2420 Zigbee Radio– Sensors
• 3-Axis Accelerometer (ADXL335)• 3-Axis Gyroscope (3 XV-3500CB)• 40Hz Sensing
– Vib motor
• Smartphones– Nokia N96, Google Nexus One– Bluetooth Radio
• Bridge node to convert ZigbeeBluetooth
Implementation Detail (Hardware)
Google Nexus One Sensor node
Nokia N96 Bluetooth Headset
• We carefully chose gyroscope with very small latency– <30ms: XV-3500CB (Epson)
• Drops one sample Same accuracy with complete samples
– >50ms: ADXRS620 (Analog Devices), IDG-500 (Invensense)• Drops two+ samples 0.4%+ of accuracy loss
OUR CHOICE

Accel-based trigger alone is not effective:
• Mobility noises trigger gyroscope very frequently
FN with a High Threshold(Accel-based Segmentor)
FP with a Low Threshold(Accel-based Segmentor)
Accel GyroTrigger
hard to usehigher thresholdbecause of FNs

If we take in account the bridge node: 51hrs (1.2x)

Accel’s sensitivity should fit to mobility
Mobility SituationRIDE STAND WALK RUN
Accel-based 0.15G 0.15G 0.2G 0.35GGyro-based 25 degree/sec
Optimal threshold for Accel and Gyro(minimizing false detections without ignorance)
Higher Fixed Sensitivity False Detections on Higher mobility
Lower Fixed Sensitivity Ignorance on Lower mobilityPrecision ↓
Recall ↓

Closed-loop Collaborative Segmentation
Gyro-basedDetector
Accurate,High energy
Accurate, High energyor
Insensitive, Low energy
Accurate,Low energy
Trigger Gyro-basedDetector
Accel-basedDetector
Trigger Gyro-basedDetector
Accel-basedDetector
Feedback
Gyro-based Detector
Open-loop Detector
Closed-loop Collaborative Detector










![WristLens: Enabling Single-Handed Surface Gesture ... · ABSTRACT WristLens is a system for surface interaction from wrist-worn wear- ... Skinput [14] detects the location of finger](https://img.pdfslide.net/doc/110x75/5f9ea0f5bda1f3349601ff64/wristlens-enabling-single-handed-surface-gesture-abstract-wristlens-is-a-system.jpg)