Embed Size (px)
Citation preview
모션 시스템 튜닝
애플리케이션 기술서
중요 사용자 정보
이 제품을 설치, 구성, 운전, 또는 유지보수하기 전에 이 문서와 이 장비의 설치, 구성, 운전에 관한 추가 재원 섹션
에 표기된 문서를 읽어 주십시오. 사용자는 해당되는 모든 규정, 법규, 표준의 요구사항과 함께 설치 및 배선 설명
을 잘 숙지해야 합니다.
설치, 조정, 운전, 사용, 조립, 해체, 유지보수를 포함한 활동은 해당 실무 규정에 따라 적절한 교육을 받은 자가 수
행해야 합니다.
이 장비를 제조자가 지정하지 않은 방식으로 사용하는 경우, 장비가 제공하는 보호 기능이 손상될 수 있습니다.
어떤 경우에도 로크웰 오토메이션은 본 장비의 사용 또는 적용으로 인해 발생하는 간접적 또는 파생적 손해에 대
해 책임을 지지 않습니다.
본 매뉴얼에 포함된 예와 도표는 설명 목적으로만 제공됩니다. 특정 설치와 관련된 다양한 변수 및 요구 사항으로
인해, 로크웰 오토메이션은 이러한 예와 도표에 근거한 실제 사용에 대해 책임을 지지 않습니다.
로크웰 오토메이션은 본 매뉴얼에 설명된 정보, 회로, 장비 또는 소프트웨어의 사용과 관련된 특허권에 대해 어떠
한 책임도 지지 않습니다.
로크웰 오토메이션의 서면 허가 없이 본 매뉴얼 내용의 전부 또는 일부를 복제하는 행위는 금지되어 있습니다.
본 매뉴얼은 다음과 같은 안전 고려 사항에 대해 설명합니다.
특정한 사전 예방책을 제시하는 라벨이 장비의 표면이나 내부에 부착될 수 있습니다.
Allen-Bradley, Rockwell Software 및 Rockwell Automation은 로크웰 오토메이션의 고유 상표입니다.
로크웰 오토메이션의 소유가 아닌 상표는 각 해당 기업의 재산입니다.
WARNING: 위험 환경에서 폭발을 유발하여 부상, 사망, 재산 피해 또는 경제적 손실을 초래할
수 있는 사례 또는 상황에 대한 정보를 나타냅니다.
ATTENTION: 부상, 사망, 재산 피해 또는 경제적 손실을 초래할 수 있는 사례 또는 상황에 대한
정보를 나타냅니다. 위험을 식별 및 회피하고 중요성을 인지하기 위해 주의를 기울여야 합니다.
주 의 본 제품을 적용하거나 이해하는 데 매우 중요한 정보를 나타냅니다.
SHOCK HAZARD: 라벨은 장비의 표면 또는 내부에 부착되어(예: 드라이브 또는 모터) 고전압
이 흐르고 있음을 경고합니다.
BURN HAZARD: 라벨은 장비의 표면 또는 내부에 부착되어(예: 드라이브 또는 모터) 표면 온도
가 매우 높음을 경고합니다.
ARC FLASH HAZARD: 아크 섬락의 잠재적 위험을 경고하기 위한 라벨이 장비의 표면 또는 내
부, 예를 들어 MCC 등에 부착될 수 있습니다. 아크 섬락은 심각한 부상이나 사망을 초래할 수
있습니다. 적절한 개인 보호장비(PPE)를 착용하십시오. 안전 작업 및 개인 보호장비(PPE)에 대한
모든 규제 요구사항을 따르십시오.
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 3
목차
1장배경 서보 루프 대역폭 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
댐핑 계수 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12드라이브 모델 시간 상수 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13토크 스칼라(Scalar). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14부하 관측기 기능(Load observer) . . . . . . . . . . . . . . . . . . . . . . . . . 16
장점 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16작동 방법 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16Kinetix 6000 드라이브 구성 . . . . . . . . . . . . . . . . . . . . . . . . . . 19Kinetix 5500 및 6500 드라이브 구성 . . . . . . . . . . . . . . . . . . . 21
2장아웃오브박스 튜닝 Sercos Drives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
게인(Gain) 계산 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23Kinetix 6000 드라이브 권장 설정 . . . . . . . . . . . . . . . . . . . . . . 24
CIP Drives. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26게인(Gain) 계산 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26Kinetix 5500 및 6500 드라이브 권장 설정 . . . . . . . . . . . . . . . 28
추가 튜닝이 필요한가? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3장오토 튜닝 Sercos 드라이브 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
충격 시험(Bump Test). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31게인(Gain) 계산 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32Kinetix 6000 드라이브 권장 설정 . . . . . . . . . . . . . . . . . . . . . . 37
CIP 드라이브 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41충격 시험(Bump Test). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41게인(Gain) 계산 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42Kinetix 5500 및 6500 드라이브 권장 설정 . . . . . . . . . . . . . . . 46
추가 튜닝이 필요한가? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4장수동 튜닝 축 초기화 (선택) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
속도 루프 튜닝 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53위치 루프 튜닝 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
목차
5장필터 및 보상 고주파 공진의 보상 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
노치 필터(Notch Filter). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61Sercos 드라이브 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62CIP 드라이브. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
로우패스 필터(Low-pass Filter). . . . . . . . . . . . . . . . . . . . . . . . . . . 63Sercos 드라이브 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64CIP 드라이브. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
CIP 드라이브 리드/래그 필터(Lead-Lag Filter) . . . . . . . . . . . . . . . 65마찰 보상 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
정지 마찰 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66슬라이딩 마찰. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67점성 마찰 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
백래시(Backlesh) 보상 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68Sercos 드라이브 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69CIP 드라이브. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
6장Kinetix 300 드라이브 튜닝 제어 루프 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
오토 튜닝 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71튜닝 방식 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71작동 방법 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
수동 튜닝 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74필터 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
피드백 필터 및 로우패스 필터(Low-pass Filter) . . . . . . . . . . . 78공진기 및 노치 필터(Notch Filter) . . . . . . . . . . . . . . . . . . . . . 78
부록 A튜닝을 위한 이동 프로파일 생성
예 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81예 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83예 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
부록 B튜닝을 위한 트렌드 생성 트렌드 속성 대화상자. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
이름 탭 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85일반 탭 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85표시 탭 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86펜 탭. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86X축 탭. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90Y축 탭. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 5
목차
샘플링 탭 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91수치 막대 정보 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
부록 CIDN 쓰기 메시지로 Sercos 게인(Gain) 설정
부하 관측기 구성 속성 설정 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95부하 관측기 게인(Gain) 설정 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
부록 D수직축 튜닝 고려사항. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
튜닝 방식 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99Sercos 드라이브 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99CIP 드라이브. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
부록 E구성도 Sercos 드라이브 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
CIP 드라이브 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102위치 루프 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102속도 루프 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103토크/전류 루프 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
색인

6 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
목차
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 7
1 장
배경
이 문서는 아래 항목에 익숙한 모션 제어 사용자들을 위해 작성되었습니다.
• Kinetix® 서보 드라이브
• Sercos 또는 Ethernet/IP 통신
• Studio 5000 Logix Designer™ 애플리케이션 활용 및 새로운 모션 축
생성
• 모션 제어 애플리케이션의 제어 루프 작동 방식 이해
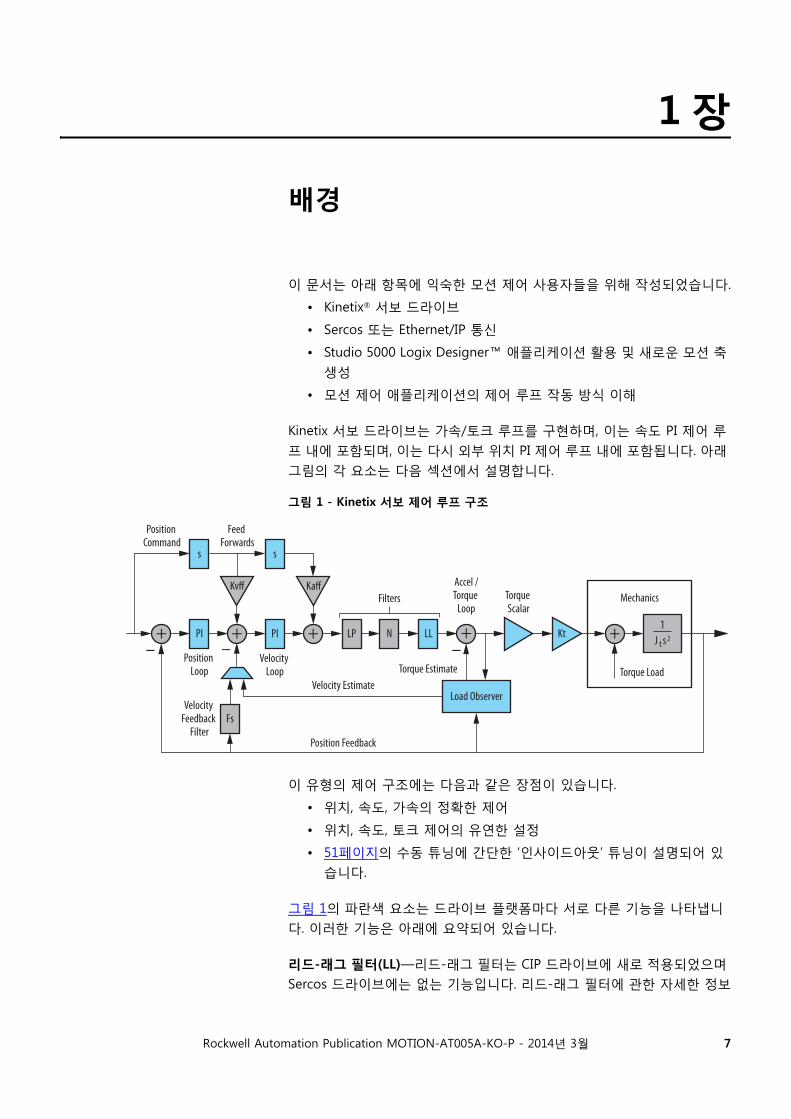
Kinetix 서보 드라이브는 가속/토크 루프를 구현하며, 이는 속도 PI 제어 루
프 내에 포함되며, 이는 다시 외부 위치 PI 제어 루프 내에 포함됩니다. 아래
그림의 각 요소는 다음 섹션에서 설명합니다.
그림 1 - Kinetix 서보 제어 루프 구조
이 유형의 제어 구조에는 다음과 같은 장점이 있습니다.
• 위치, 속도, 가속의 정확한 제어
• 위치, 속도, 토크 제어의 유연한 설정
• 51페이지의 수동 튜닝에 간단한 ‘인사이드아웃’ 튜닝이 설명되어 있
습니다.
그림 1의 파란색 요소는 드라이브 플랫폼마다 서로 다른 기능을 나타냅니
다. 이러한 기능은 아래에 요약되어 있습니다.
리드-래그 필터(LL)—리드-래그 필터는 CIP 드라이브에 새로 적용되었으며
Sercos 드라이브에는 없는 기능입니다. 리드-래그 필터에 관한 자세한 정보
Load Observer
Filters
Accel /Torque
LoopTorque Scalar
Torque Load
Mechanics
+ PI + +PI
s s
LL KtLP
Fs
+N +
Kvff Kaff
Position Loop
Position Command
Feed Forwards
Velocity Loop
Velocity Feedback
Filter
Velocity Estimate
Position Feedback
Torque Estimate
1
J t s 2
– – –
8 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
1장 배경
는 66페이지의 CIP 드라이브 리드/래그 필터(Lead-Lag Filter)를 참조하십시
오.
위치 명령 및 피드포워드 명령—CIP 드라이브의 정밀 보간기는 3차 위치 명
령, 2차 속도 피드포워드, 1차 가속 피드포워드를 생성합니다. Sercos 드라
이브에서, 정밀 보간기는 2차 위치 명령, 1차 속도 피드포워드, 0차 가속 피
드포워드를 생성합니다. 0차 가속 피드포워드 신호란 실제 업데이트가 비
정기 업데이트 간격(CUR)으로 이루어지는 것을 의미합니다. 이것이 많은
Sercos 애플리케이션이 가속 피드포워드를 사용했을 때 장점을 누리지 못
하는 한 가지 이유입니다.
토크 스칼라(Scalar) 및 모터 토크 상수 (Kt)—토크 스칼라(Scalar)는 튜닝과
전체 모션 성능에 영향을 줍니다. 모터 토크 상수는 토크 스칼라(Scalar)에
영향을 미칩니다. 토크 스칼라(Scalar), 모터 토크 상수, CIP 드라이브와
Sercos 드라이브의 차이점에 관한 자세한 정보는 15페이지의 토크 스칼라
(Scalar)를 참조하세요.
부하 관측기 및 속도 추정—부하 관측기 및 속도 추정에 관한 자세한 정보
는 17페이지의 부하 관측기 기능(Load observer)을 참조하세요.
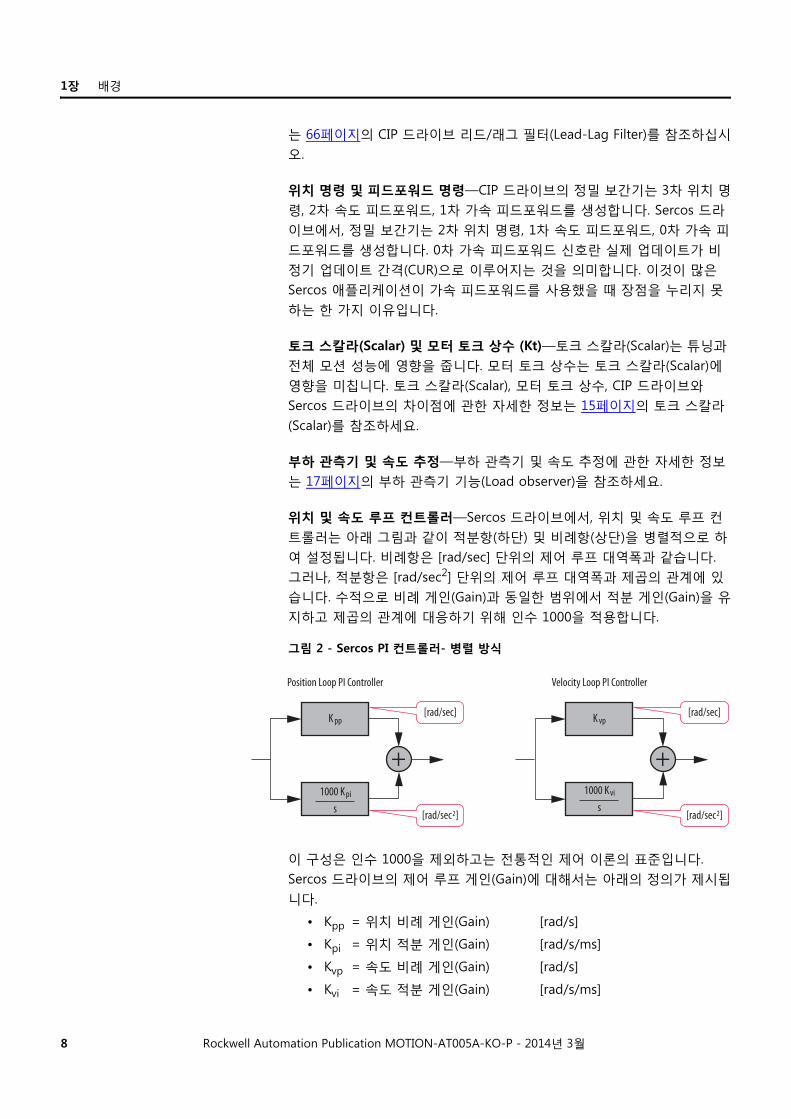
위치 및 속도 루프 컨트롤러—Sercos 드라이브에서, 위치 및 속도 루프 컨
트롤러는 아래 그림과 같이 적분항(하단) 및 비례항(상단)을 병렬적으로 하
여 설정됩니다. 비례항은 [rad/sec] 단위의 제어 루프 대역폭과 같습니다.
그러나, 적분항은 [rad/sec2] 단위의 제어 루프 대역폭과 제곱의 관계에 있
습니다. 수적으로 비례 게인(Gain)과 동일한 범위에서 적분 게인(Gain)을 유
지하고 제곱의 관계에 대응하기 위해 인수 1000을 적용합니다.
그림 2 - Sercos PI 컨트롤러- 병렬 방식
이 구성은 인수 1000을 제외하고는 전통적인 제어 이론의 표준입니다.
Sercos 드라이브의 제어 루프 게인(Gain)에 대해서는 아래의 정의가 제시됩
니다.
• Kpp = 위치 비례 게인(Gain) [rad/s]
• Kpi = 위치 적분 게인(Gain) [rad/s/ms]
• Kvp = 속도 비례 게인(Gain) [rad/s]
• Kvi = 속도 적분 게인(Gain) [rad/s/ms]
+
K pp K vp
1000 Kpi
s[rad/sec ]2
[rad/sec]
+
[rad/sec ]2
[rad/sec]
Position Loop PI Controller Velocity Loop PI Controller
1000 Kvi
s
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 9
1장 배경
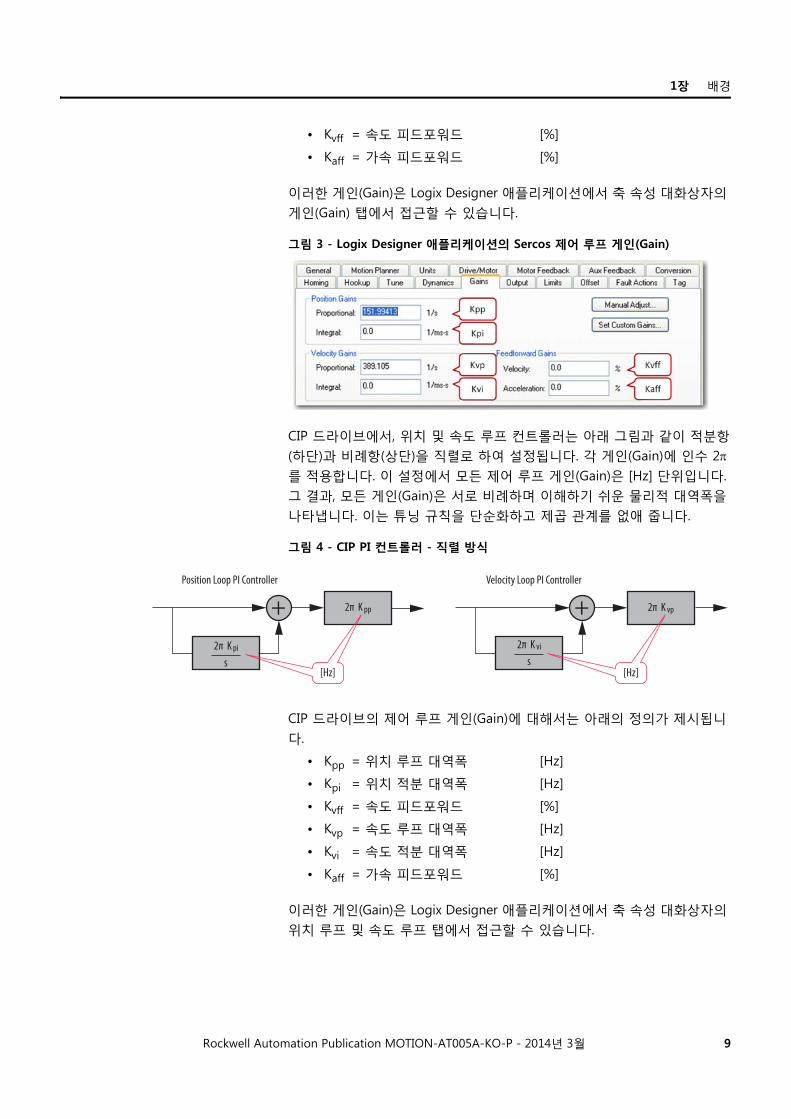
• Kvff = 속도 피드포워드 [%]
• Kaff = 가속 피드포워드 [%]
이러한 게인(Gain)은 Logix Designer 애플리케이션에서 축 속성 대화상자의
게인(Gain) 탭에서 접근할 수 있습니다.
그림 3 - Logix Designer 애플리케이션의 Sercos 제어 루프 게인(Gain)
CIP 드라이브에서, 위치 및 속도 루프 컨트롤러는 아래 그림과 같이 적분항
(하단)과 비례항(상단)을 직렬로 하여 설정됩니다. 각 게인(Gain)에 인수 2를 적용합니다. 이 설정에서 모든 제어 루프 게인(Gain)은 [Hz] 단위입니다.
그 결과, 모든 게인(Gain)은 서로 비례하며 이해하기 쉬운 물리적 대역폭을
나타냅니다. 이는 튜닝 규칙을 단순화하고 제곱 관계를 없애 줍니다.
그림 4 - CIP PI 컨트롤러 - 직렬 방식
CIP 드라이브의 제어 루프 게인(Gain)에 대해서는 아래의 정의가 제시됩니
다.
• Kpp = 위치 루프 대역폭 [Hz]
• Kpi = 위치 적분 대역폭 [Hz]
• Kvff = 속도 피드포워드 [%]
• Kvp = 속도 루프 대역폭 [Hz]
• Kvi = 속도 적분 대역폭 [Hz]
• Kaff = 가속 피드포워드 [%]
이러한 게인(Gain)은 Logix Designer 애플리케이션에서 축 속성 대화상자의
위치 루프 및 속도 루프 탭에서 접근할 수 있습니다.
Position Loop PI Controller Velocity Loop PI Controller
+ K pp2π
[Hz]s
K pi2π
+
[Hz]s
K vi2π
K vp2π
10 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
1장 배경
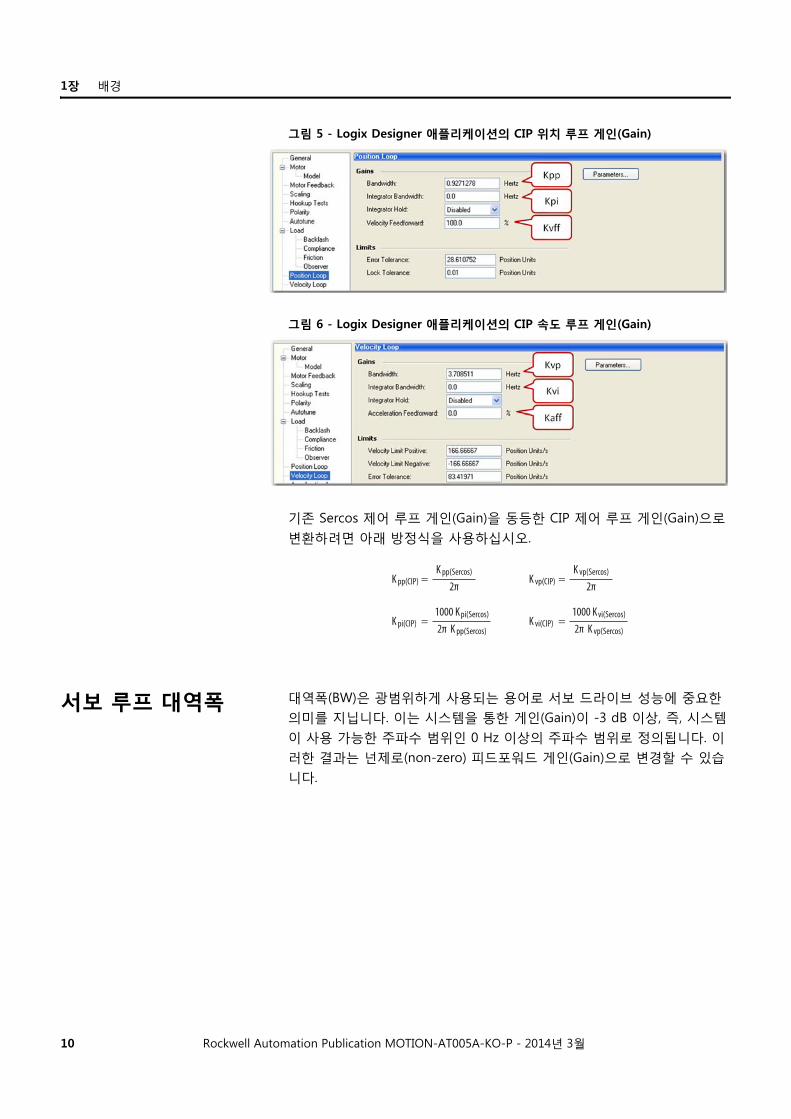
그림 5 - Logix Designer 애플리케이션의 CIP 위치 루프 게인(Gain)
그림 6 - Logix Designer 애플리케이션의 CIP 속도 루프 게인(Gain)
기존 Sercos 제어 루프 게인(Gain)을 동등한 CIP 제어 루프 게인(Gain)으로
변환하려면 아래 방정식을 사용하십시오.
서보 루프 대역폭 대역폭(BW)은 광범위하게 사용되는 용어로 서보 드라이브 성능에 중요한
의미를 지닙니다. 이는 시스템을 통한 게인(Gain)이 -3 dB 이상, 즉, 시스템
이 사용 가능한 주파수 범위인 0 Hz 이상의 주파수 범위로 정의됩니다. 이
러한 결과는 넌제로(non-zero) 피드포워드 게인(Gain)으로 변경할 수 있습
니다.
K pp(CIP) =K pp(Sercos)
K vp(CIP) =
K vi(CIP) =
K vp(Sercos)
K pi(CIP) =
2π
1000 Kpi(Sercos)
K pp(Sercos)2π
1000 Kvi(Sercos)
K vp(Sercos)2π
2π
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 11
1장 배경
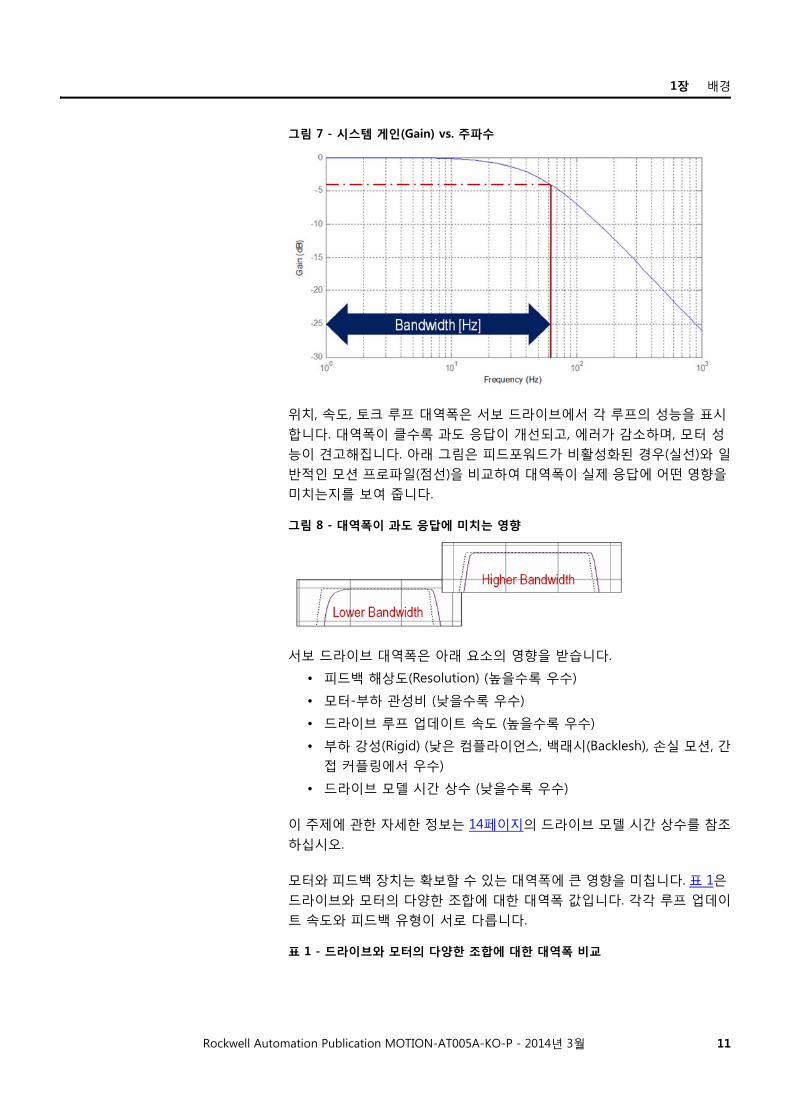
그림 7 - 시스템 게인(Gain) vs. 주파수
위치, 속도, 토크 루프 대역폭은 서보 드라이브에서 각 루프의 성능을 표시
합니다. 대역폭이 클수록 과도 응답이 개선되고, 에러가 감소하며, 모터 성
능이 견고해집니다. 아래 그림은 피드포워드가 비활성화된 경우(실선)와 일
반적인 모션 프로파일(점선)을 비교하여 대역폭이 실제 응답에 어떤 영향을
미치는지를 보여 줍니다.
그림 8 - 대역폭이 과도 응답에 미치는 영향
서보 드라이브 대역폭은 아래 요소의 영향을 받습니다.
• 피드백 해상도(Resolution) (높을수록 우수)
• 모터-부하 관성비 (낮을수록 우수)
• 드라이브 루프 업데이트 속도 (높을수록 우수)
• 부하 강성(Rigid) (낮은 컴플라이언스, 백래시(Backlesh), 손실 모션, 간
접 커플링에서 우수)
• 드라이브 모델 시간 상수 (낮을수록 우수)
이 주제에 관한 자세한 정보는 14페이지의 드라이브 모델 시간 상수를 참조
하십시오.
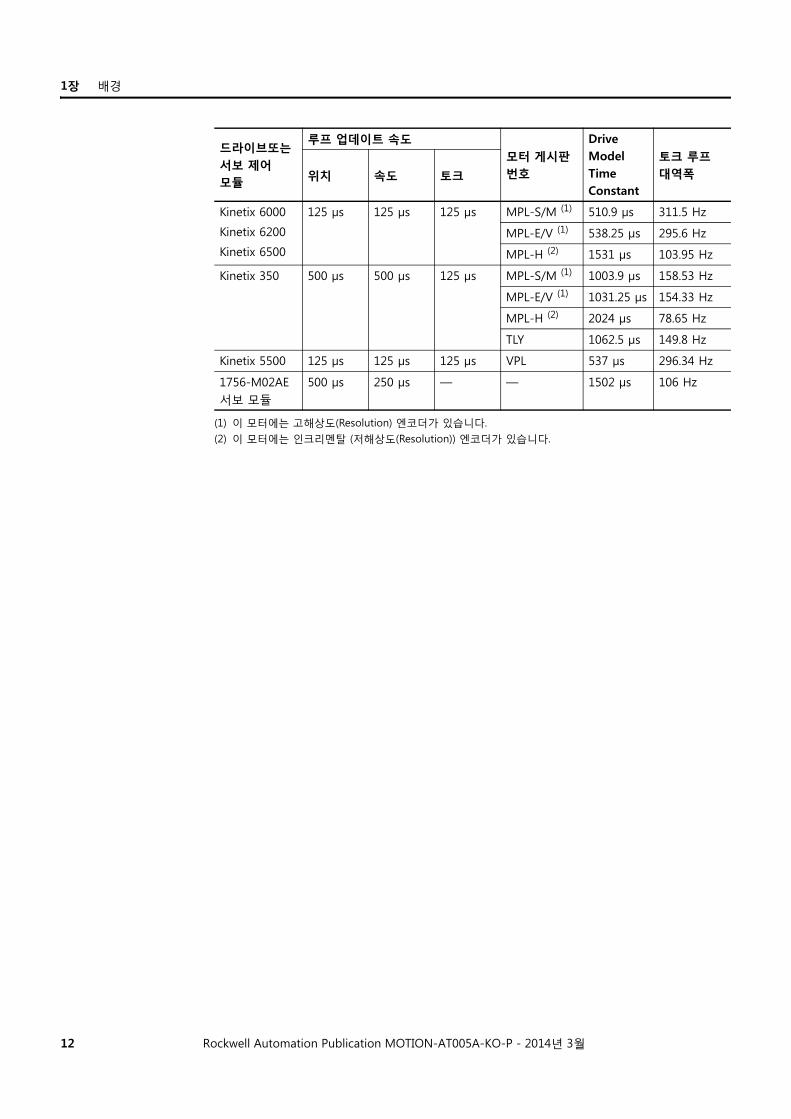
모터와 피드백 장치는 확보할 수 있는 대역폭에 큰 영향을 미칩니다. 표 1은
드라이브와 모터의 다양한 조합에 대한 대역폭 값입니다. 각각 루프 업데이
트 속도와 피드백 유형이 서로 다릅니다.
표 1 - 드라이브와 모터의 다양한 조합에 대한 대역폭 비교
12 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
1장 배경
드라이브 또는 서보 제어 모듈
루프 업데이트 속도모터 게시판 번호
Drive Model Time Constant
토크 루프 대역폭위치 속도 토크
Kinetix 6000
Kinetix 6200
Kinetix 6500
125 µs 125 µs 125 µs MPL-S/M (1) 510.9 µs 311.5 Hz
MPL-E/V (1) 538.25 µs 295.6 Hz
MPL-H (2) 1531 µs 103.95 Hz
Kinetix 350 500 µs 500 µs 125 µs MPL-S/M (1) 1003.9 µs 158.53 Hz
MPL-E/V (1) 1031.25 µs 154.33 Hz
MPL-H (2) 2024 µs 78.65 Hz
TLY 1062.5 µs 149.8 Hz
Kinetix 5500 125 µs 125 µs 125 µs VPL 537 µs 296.34 Hz
1756-M02AE 서보 모듈
500 µs 250 µs — — 1502 µs 106 Hz
(1) 이 모터에는 고해상도(Resolution) 엔코더가 있습니다.
(2) 이 모터에는 인크리멘탈 (저해상도(Resolution)) 엔코더가 있습니다.
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 13
1장 배경
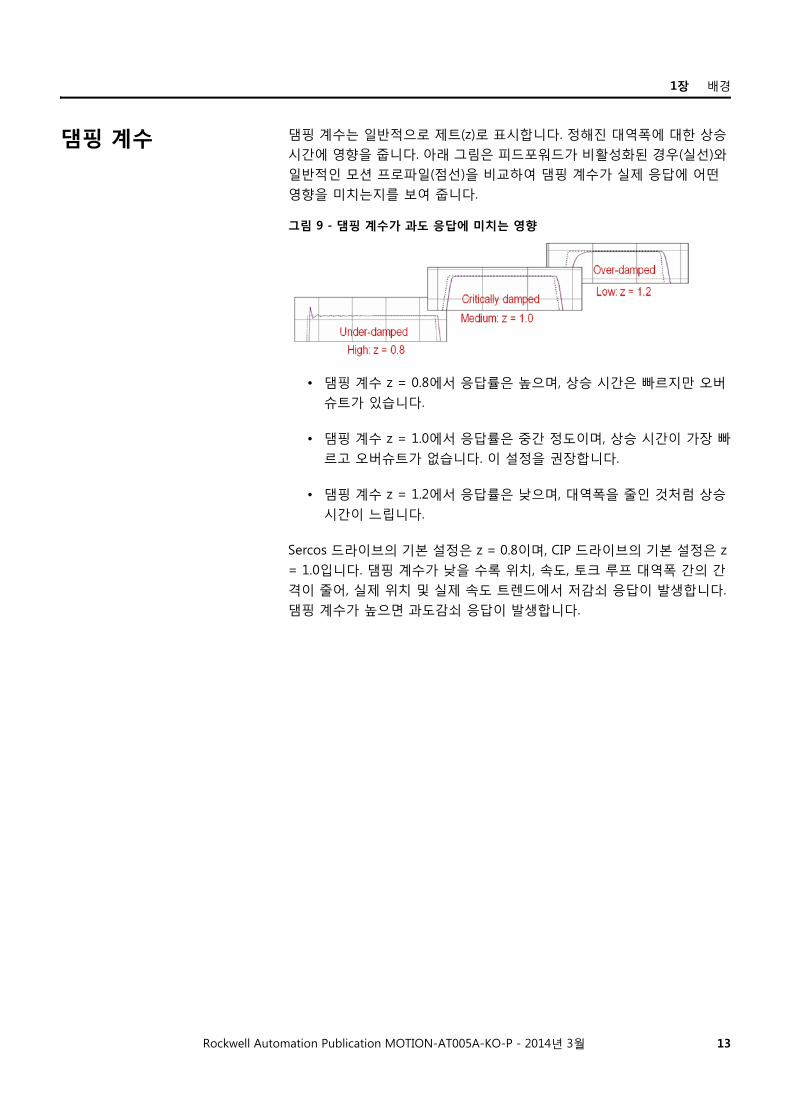
댐핑 계수 댐핑 계수는 일반적으로 제트(z)로 표시합니다. 정해진 대역폭에 대한 상승
시간에 영향을 줍니다. 아래 그림은 피드포워드가 비활성화된 경우(실선)와
일반적인 모션 프로파일(점선)을 비교하여 댐핑 계수가 실제 응답에 어떤
영향을 미치는지를 보여 줍니다.
그림 9 - 댐핑 계수가 과도 응답에 미치는 영향
• 댐핑 계수 z = 0.8에서 응답률은 높으며, 상승 시간은 빠르지만 오버
슈트가 있습니다.
• 댐핑 계수 z = 1.0에서 응답률은 중간 정도이며, 상승 시간이 가장 빠
르고 오버슈트가 없습니다. 이 설정을 권장합니다.
• 댐핑 계수 z = 1.2에서 응답률은 낮으며, 대역폭을 줄인 것처럼 상승
시간이 느립니다.
Sercos 드라이브의 기본 설정은 z = 0.8이며, CIP 드라이브의 기본 설정은 z
= 1.0입니다. 댐핑 계수가 낮을 수록 위치, 속도, 토크 루프 대역폭 간의 간
격이 줄어, 실제 위치 및 실제 속도 트렌드에서 저감쇠 응답이 발생합니다.
댐핑 계수가 높으면 과도감쇠 응답이 발생합니다.
14 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
1장 배경
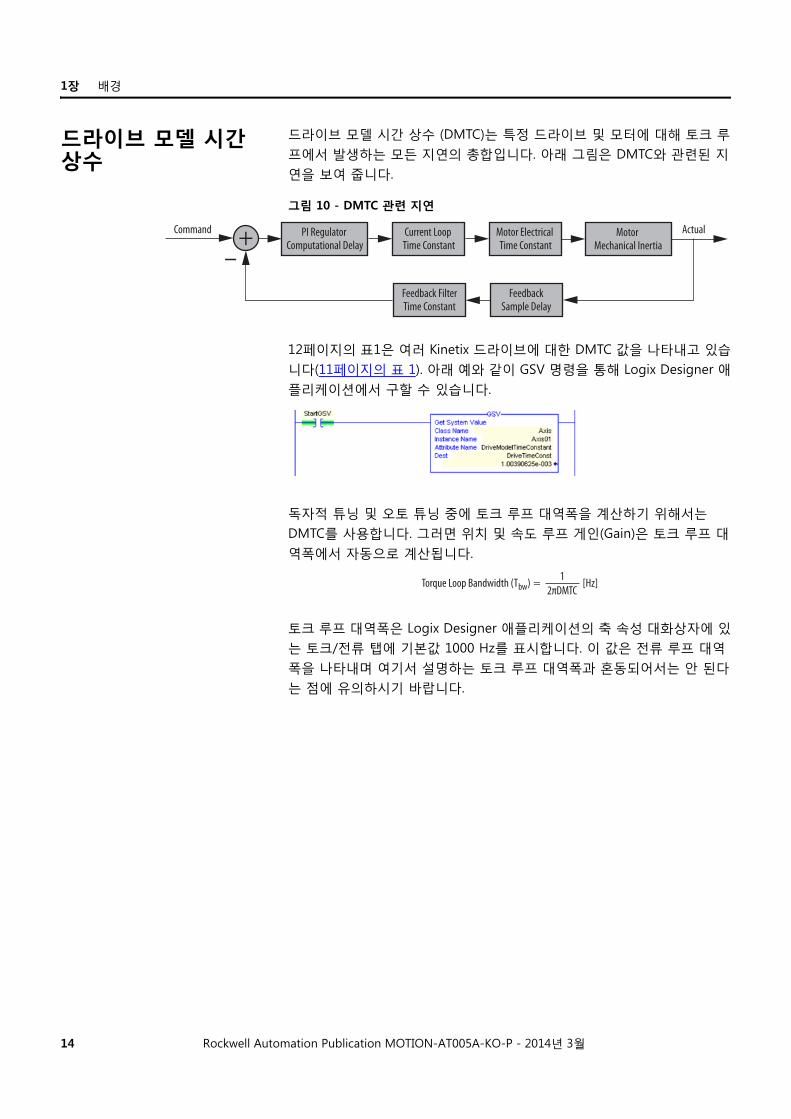
드라이브 모델 시간 상수
드라이브 모델 시간 상수 (DMTC)는 특정 드라이브 및 모터에 대해 토크 루
프에서 발생하는 모든 지연의 총합입니다. 아래 그림은 DMTC와 관련된 지
연을 보여 줍니다.
그림 10 - DMTC 관련 지연
12페이지의 표1은 여러 Kinetix 드라이브에 대한 DMTC 값을 나타내고 있습
니다(11페이지의 표 1). 아래 예와 같이 GSV 명령을 통해 Logix Designer 애
플리케이션에서 구할 수 있습니다.
독자적 튜닝 및 오토 튜닝 중에 토크 루프 대역폭을 계산하기 위해서는
DMTC를 사용합니다. 그러면 위치 및 속도 루프 게인(Gain)은 토크 루프 대
역폭에서 자동으로 계산됩니다.
토크 루프 대역폭은 Logix Designer 애플리케이션의 축 속성 대화상자에 있
는 토크/전류 탭에 기본값 1000 Hz를 표시합니다. 이 값은 전류 루프 대역
폭을 나타내며 여기서 설명하는 토크 루프 대역폭과 혼동되어서는 안 된다
는 점에 유의하시기 바랍니다.
Command PI Regulator Computational Delay
Actual+ Motor
Mechanical Inertia
Current Loop Time Constant
Motor Electrical Time Constant
Feedback FilterTime Constant
FeedbackSample Delay
–
1=
2πDMTC[Hz]Torque Loop Bandwidth (T )bw
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 15
1장 배경
토크 스칼라(Scalar) 토크 스칼라(Scalar)는 제어 대상 시스템을 통일된 게인(Gain)으로 조정하는
토크 루프에 있는 게인(Gain)입니다. 다시 말해, 토크 스칼라(Scalar)를 적용
하면 모터와 부하가 하나의 게인(Gain)을 갖습니다.
그림 11 - 시스템의 토크 스케일링
토크 스케일링은 속도 루프 응답이 모터 게인(Gain) 또는 부하 관성의 영향
을 받지 않도록 하며, 속도 루프 응답은 Kvp으로 설정한 속도 루프 대역폭에
의해 표현됩니다. 토크 스칼라(Scalar)는 전체 시스템 게인(Gain)의 역할을
합니다. 아래의 정의를 적용합니다.
• Kt = 모터 토크 상수
• Jm= 모터 관성
• Jl = 부하 관성
• R = Jl / Jm = 부하 관성비
• Jt = Jm (R+1) = 총 시스템 관성
토크 스칼라(Scalar)는 R과 두 파라미터 Kt와 Jm으로 이루어진 함수로, 모터
를 선택할 때 Logix Designer 애플리케이션의 모션 데이터베이스에서 쿼리
를 추출합니다.
그림 12 - 토크 스칼라(Scalar) 계산
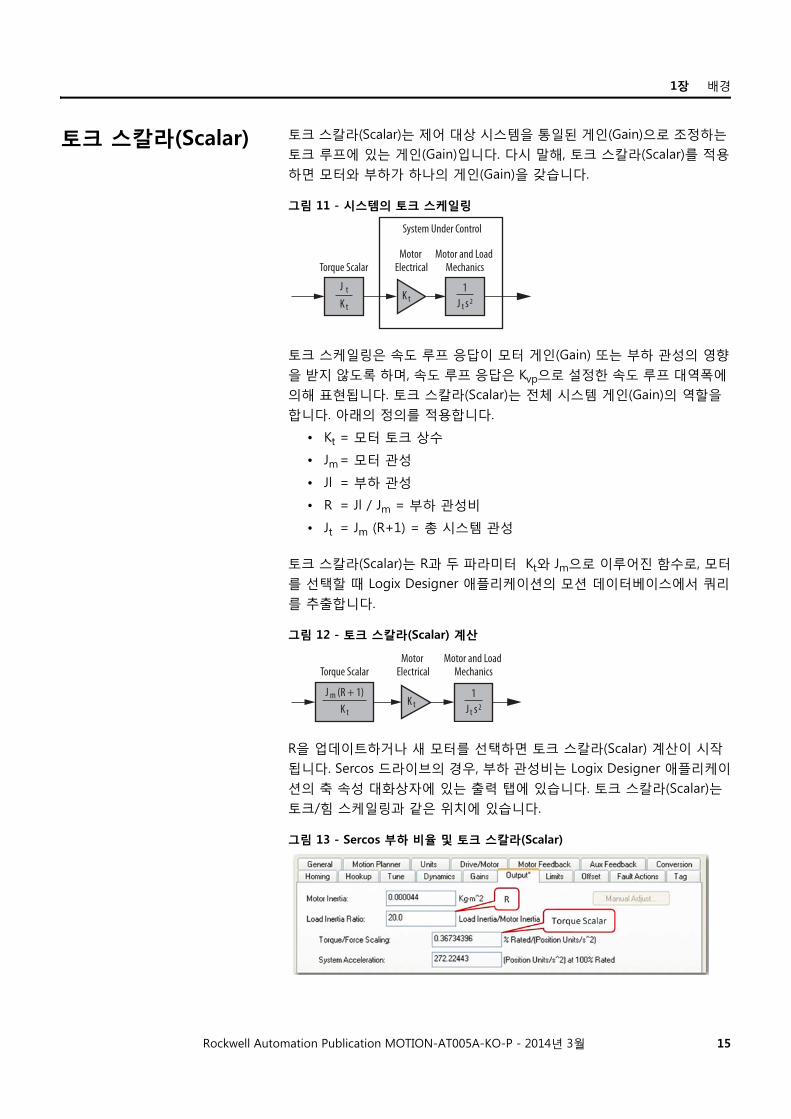
R을 업데이트하거나 새 모터를 선택하면 토크 스칼라(Scalar) 계산이 시작
됩니다. Sercos 드라이브의 경우, 부하 관성비는 Logix Designer 애플리케이
션의 축 속성 대화상자에 있는 출력 탭에 있습니다. 토크 스칼라(Scalar)는
토크/힘 스케일링과 같은 위치에 있습니다.
그림 13 - Sercos 부하 비율 및 토크 스칼라(Scalar)
Torque Scalar
System Under Control
Motor and Load Mechanics
Motor Electrical
1
J t s 2K t
K t
J t
Torque ScalarMotor
ElectricalMotor and Load
Mechanics
1
J t s 2K t
J (R + 1)m
K t
16 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
1장 배경
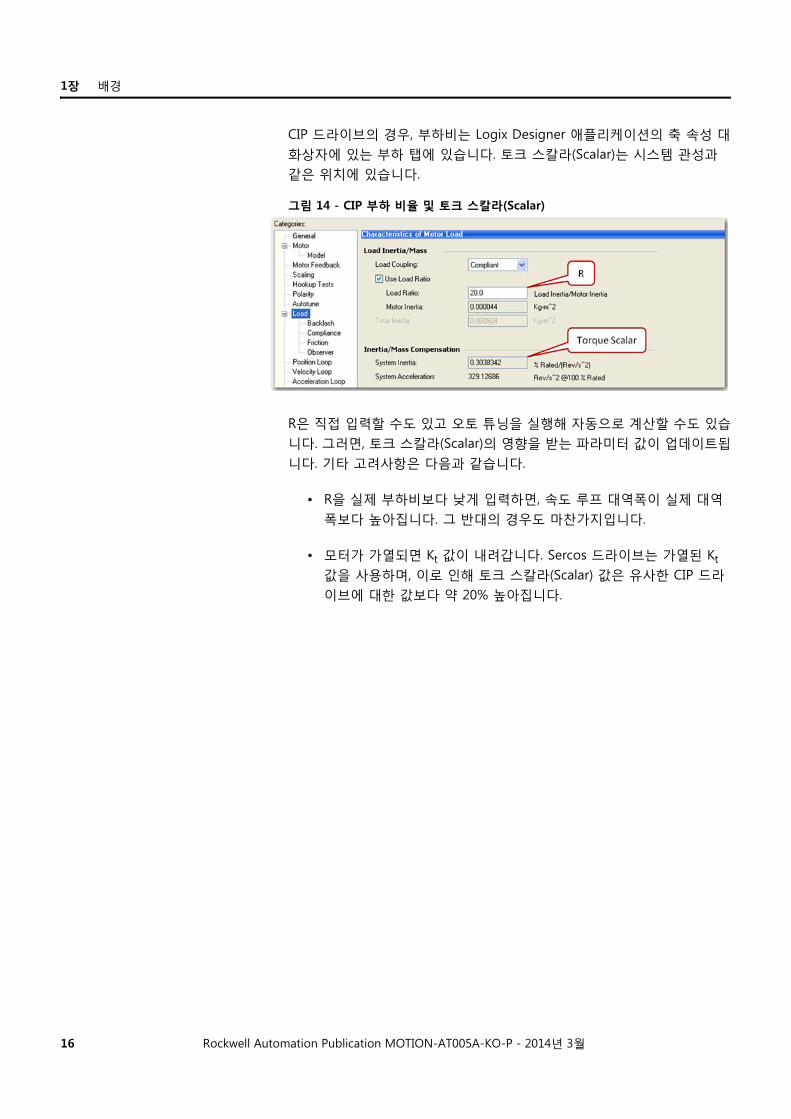
CIP 드라이브의 경우, 부하비는 Logix Designer 애플리케이션의 축 속성 대
화상자에 있는 부하 탭에 있습니다. 토크 스칼라(Scalar)는 시스템 관성과
같은 위치에 있습니다.
그림 14 - CIP 부하 비율 및 토크 스칼라(Scalar)
R은 직접 입력할 수도 있고 오토 튜닝을 실행해 자동으로 계산할 수도 있습
니다. 그러면, 토크 스칼라(Scalar)의 영향을 받는 파라미터 값이 업데이트됩
니다. 기타 고려사항은 다음과 같습니다.
• R을 실제 부하비보다 낮게 입력하면, 속도 루프 대역폭이 실제 대역
폭보다 높아집니다. 그 반대의 경우도 마찬가지입니다.
• 모터가 가열되면 Kt 값이 내려갑니다. Sercos 드라이브는 가열된 Kt
값을 사용하며, 이로 인해 토크 스칼라(Scalar) 값은 유사한 CIP 드라
이브에 대한 값보다 약 20% 높아집니다.
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 17
1장 배경
부하 관측기 기능(Load observer)
부하 관측기의 특징은 모터의 기계 부하를 추산해 그에 대해 보상함으로써,
마치 모터가 무부하 상태인 것처럼 작동되게 하여 상대적으로 쉽게 제어되
도록 만드는 드라이브 내부 제어 루프입니다. 그 결과, 부하 관측기는 속도
루프 대역폭 내의 돌발적 관성/토크 변경, 컴플라이언스, 백래시(Backlesh),
공진 등의 외란 및 부하 역학에 대해 자동으로 보상합니다.
장점
부하 관측기에 독자적 제어 루프 게인(Gain)을 사용할 수 있으며 이 때는 부
하를 알 수 없으므로 부하 관성비 = 0입니다. 또는 오토 튜닝된 제어 루프
게인(Gain)인 경우 오토 튜닝 절차를 수행함으로써 부하 관성비를 확인 또
는 계산할 수 있습니다.
독자적 제어 루프 게인(Gain)을 적용하는 경우, 부하 관측기는 아래 기능을
수행합니다.
• 튜닝 없이 상대적으로 고성능 모션 제어를 수행합니다.
• 일정 기간 동안 부하 공진 및 기계 마모에 대해 자동 보상을 수행합니
다.
오토 튜닝된 제어 루프 게인(Gain)을 적용하는 경우, 부하 관측기는 아래 기
능을 수행합니다.
• 시스템 대역폭을 증가시킵니다.
• 트래킹 에러를 줄여, 라인 속도가 증가합니다.
• 이동 부품을 철저하게 제어하여, 마모를 줄이고 자재 비용을 절감합
니다.
작동 방법
부하 관측기는 제어 루프 내의 가속 신호에 작동하며 가속 기준 및 실제 위
치 피드백을 모니터합니다. 부하 관측기는 이상적인 무부하 모터를 모델링
하여 부하 토크 추정치를 토크 단위로 생성하는데, 이는 이상적인 모델과
실제 모터 및 역학의 편차를 나타냅니다. 이 편차는 부하 역학에 의해 모터
샤프트에 나타나는 반응 토크를 말합니다. 이는 폐 루프 동작에 의해 실시
간으로 예측된 후 보상됩니다.
18 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
1장 배경
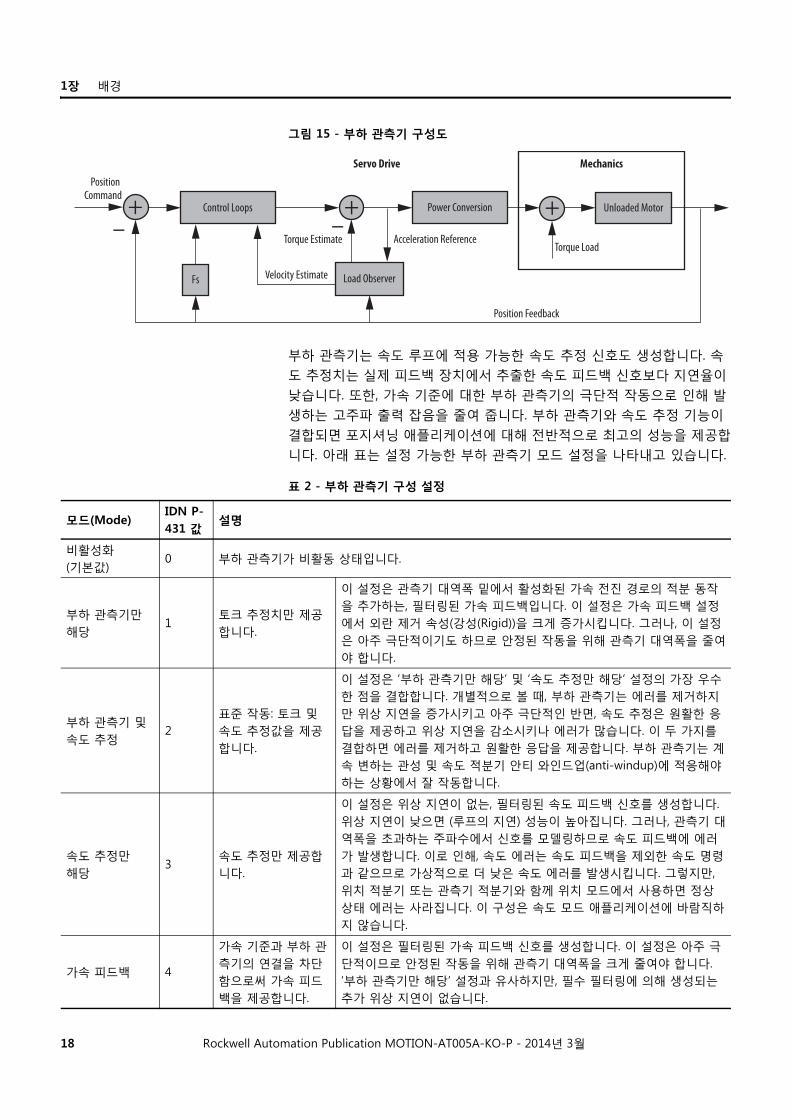
그림 15 - 부하 관측기 구성도
부하 관측기는 속도 루프에 적용 가능한 속도 추정 신호도 생성합니다. 속
도 추정치는 실제 피드백 장치에서 추출한 속도 피드백 신호보다 지연율이
낮습니다. 또한, 가속 기준에 대한 부하 관측기의 극단적 작동으로 인해 발
생하는 고주파 출력 잡음을 줄여 줍니다. 부하 관측기와 속도 추정 기능이
결합되면 포지셔닝 애플리케이션에 대해 전반적으로 최고의 성능을 제공합
니다. 아래 표는 설정 가능한 부하 관측기 모드 설정을 나타내고 있습니다.
표 2 - 부하 관측기 구성 설정
+ +– –
+
Position Command
Control Loops
Fs Velocity Estimate
Position Feedback
Torque EstimateTorque Load
MechanicsServo Drive
Acceleration Reference
Load Observer
Power Conversion Unloaded Motor
모드(Mode)IDN P-431 값
설명
비활성화 (기본값)
0 부하 관측기가 비활동 상태입니다.
부하 관측기만 해당
1토크 추정치만 제공합니다.
이 설정은 관측기 대역폭 밑에서 활성화된 가속 전진 경로의 적분 동작을 추가하는, 필터링된 가속 피드백입니다. 이 설정은 가속 피드백 설정에서 외란 제거 속성(강성(Rigid))을 크게 증가시킵니다. 그러나, 이 설정은 아주 극단적이기도 하므로 안정된 작동을 위해 관측기 대역폭을 줄여야 합니다.
부하 관측기 및 속도 추정
2표준 작동: 토크 및 속도 추정값을 제공합니다.
이 설정은 ‘부하 관측기만 해당’ 및 ‘속도 추정만 해당’ 설정의 가장 우수한 점을 결합합니다. 개별적으로 볼 때, 부하 관측기는 에러를 제거하지만 위상 지연을 증가시키고 아주 극단적인 반면, 속도 추정은 원활한 응답을 제공하고 위상 지연을 감소시키나 에러가 많습니다. 이 두 가지를 결합하면 에러를 제거하고 원활한 응답을 제공합니다. 부하 관측기는 계속 변하는 관성 및 속도 적분기 안티 와인드업(anti-windup)에 적응해야 하는 상황에서 잘 작동합니다.
속도 추정만 해당
3속도 추정만 제공합니다.
이 설정은 위상 지연이 없는, 필터링된 속도 피드백 신호를 생성합니다. 위상 지연이 낮으면 (루프의 지연) 성능이 높아집니다. 그러나, 관측기 대역폭을 초과하는 주파수에서 신호를 모델링하므로 속도 피드백에 에러가 발생합니다. 이로 인해, 속도 에러는 속도 피드백을 제외한 속도 명령과 같으므로 가상적으로 더 낮은 속도 에러를 발생시킵니다. 그렇지만, 위치 적분기 또는 관측기 적분기와 함께 위치 모드에서 사용하면 정상 상태 에러는 사라집니다. 이 구성은 속도 모드 애플리케이션에 바람직하지 않습니다.
가속 피드백 4
가속 기준과 부하 관측기의 연결을 차단함으로써 가속 피드백을 제공합니다.
이 설정은 필터링된 가속 피드백 신호를 생성합니다. 이 설정은 아주 극단적이므로 안정된 작동을 위해 관측기 대역폭을 크게 줄여야 합니다. ‘부하 관측기만 해당’ 설정과 유사하지만, 필수 필터링에 의해 생성되는 추가 위상 지연이 없습니다.
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 19
1장 배경
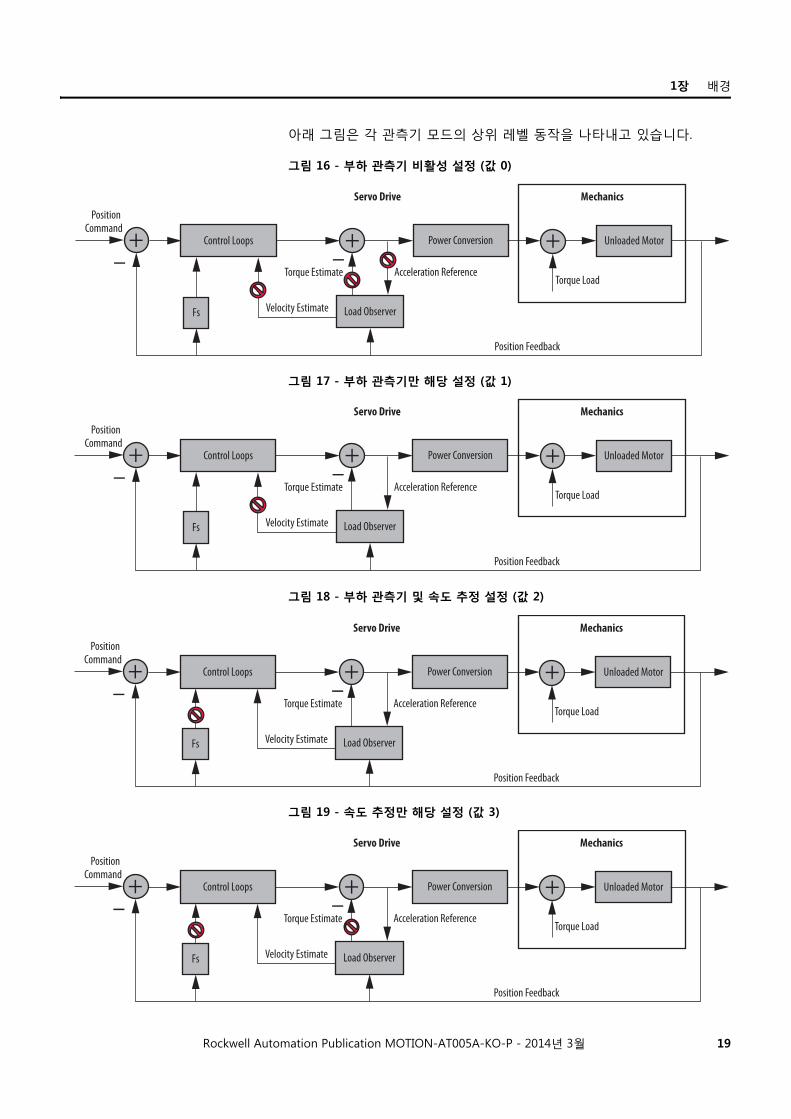
아래 그림은 각 관측기 모드의 상위 레벨 동작을 나타내고 있습니다.
그림 16 - 부하 관측기 비활성 설정 (값 0)
그림 17 - 부하 관측기만 해당 설정 (값 1)
그림 18 - 부하 관측기 및 속도 추정 설정 (값 2)
그림 19 - 속도 추정만 해당 설정 (값 3)
+ +– –
+
Position Command
Control Loops
Fs Velocity Estimate
Position Feedback
Torque EstimateTorque Load
MechanicsServo Drive
Acceleration Reference
Load Observer
Power Conversion Unloaded Motor
+ +– –
+
Position Command
Control Loops
Fs Velocity Estimate
Position Feedback
Torque EstimateTorque Load
MechanicsServo Drive
Acceleration Reference
Load Observer
Power Conversion Unloaded Motor
+ +– –
+
Position Command
Control Loops
Fs Velocity Estimate
Position Feedback
Torque EstimateTorque Load
MechanicsServo Drive
Acceleration Reference
Load Observer
Power Conversion Unloaded Motor
+ +– –
+
Position Command
Control Loops
Fs Velocity Estimate
Position Feedback
Torque EstimateTorque Load
MechanicsServo Drive
Acceleration Reference
Load Observer
Power Conversion Unloaded Motor
20 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
1장 배경
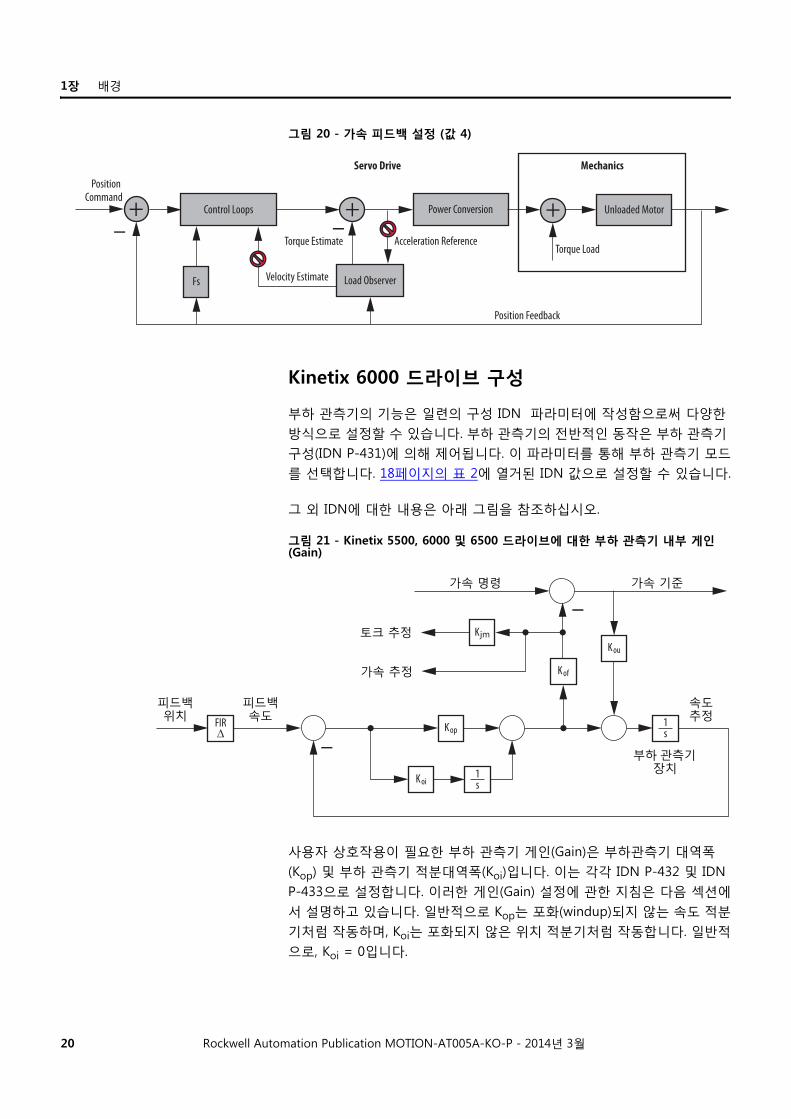
그림 20 - 가속 피드백 설정 (값 4)
Kinetix 6000 드라이브 구성
부하 관측기의 기능은 일련의 구성 IDN 파라미터에 작성함으로써 다양한
방식으로 설정할 수 있습니다. 부하 관측기의 전반적인 동작은 부하 관측기
구성(IDN P-431)에 의해 제어됩니다. 이 파라미터를 통해 부하 관측기 모드
를 선택합니다. 18페이지의 표 2에 열거된 IDN 값으로 설정할 수 있습니다.
그 외 IDN에 대한 내용은 아래 그림을 참조하십시오.
그림 21 - Kinetix 5500, 6000 및 6500 드라이브에 대한 부하 관측기 내부 게인(Gain)
사용자 상호작용이 필요한 부하 관측기 게인(Gain)은 부하관측기 대역폭
(Kop) 및 부하 관측기 적분대역폭(Koi)입니다. 이는 각각 IDN P-432 및 IDN
P-433으로 설정합니다. 이러한 게인(Gain) 설정에 관한 지침은 다음 섹션에
서 설명하고 있습니다. 일반적으로 Kop는 포화(windup)되지 않는 속도 적분
기처럼 작동하며, Koi는 포화되지 않은 위치 적분기처럼 작동합니다. 일반적
으로, Koi = 0입니다.
+ +– –
+
Position Command
Control Loops
Fs Velocity Estimate
Position Feedback
Torque EstimateTorque Load
MechanicsServo Drive
Acceleration Reference
Load Observer
Power Conversion Unloaded Motor
–
–
1s
1s
FIRΔ
Kjm
Koi
Kop
Kof
Kou
토크 추정
가속 추정
가속 기준가속 명령
피드백 위치
피드백 속도
부하 관측기 장치
속도 추정
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 21
1장 배경
사용자 상호작용이 필요 없는 부하 관측기 게인(Gain)은 부하 관측기피드백
게인(Gain)(Kof) 및 부하 관측기입력 게인(Gain)(Kou)입니다. 이는 부하 관측
기 구성을 기준으로 내부에서 자동으로 설정됩니다. 단, 가속 피드백 모드
일 때는 0과 1 사이의 일반적인 값으로 IDN P-434를 사용하여 Kof를 수동으
로도 설정할 수 있습니다.
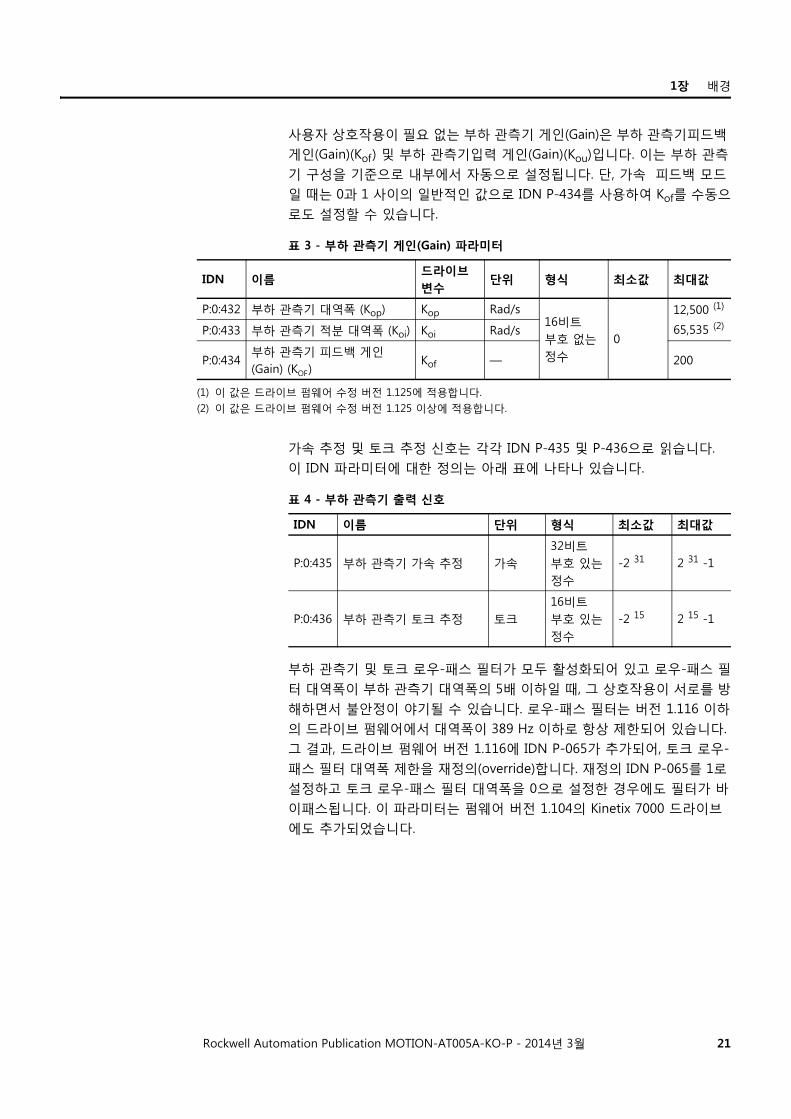
표 3 - 부하 관측기 게인(Gain) 파라미터
가속 추정 및 토크 추정 신호는 각각 IDN P-435 및 P-436으로 읽습니다.
이 IDN 파라미터에 대한 정의는 아래 표에 나타나 있습니다.
표 4 - 부하 관측기 출력 신호
부하 관측기 및 토크 로우-패스 필터가 모두 활성화되어 있고 로우-패스 필
터 대역폭이 부하 관측기 대역폭의 5배 이하일 때, 그 상호작용이 서로를 방
해하면서 불안정이 야기될 수 있습니다. 로우-패스 필터는 버전 1.116 이하
의 드라이브 펌웨어에서 대역폭이 389 Hz 이하로 항상 제한되어 있습니다.
그 결과, 드라이브 펌웨어 버전 1.116에 IDN P-065가 추가되어, 토크 로우-
패스 필터 대역폭 제한을 재정의(override)합니다. 재정의 IDN P-065를 1로
설정하고 토크 로우-패스 필터 대역폭을 0으로 설정한 경우에도 필터가 바
이패스됩니다. 이 파라미터는 펌웨어 버전 1.104의 Kinetix 7000 드라이브
에도 추가되었습니다.
IDN 이름드라이브 변수
단위 형식 최소값 최대값
P:0:432 부하 관측기 대역폭 (Kop) Kop Rad/s16비트 부호 없는 정수
0
12,500 (1)
65,535 (2)P:0:433 부하 관측기 적분 대역폭 (Koi) Koi Rad/s
P:0:434부하 관측기 피드백 게인(Gain) (KOF)
Kof — 200
(1) 이 값은 드라이브 펌웨어 수정 버전 1.125에 적용합니다.
(2) 이 값은 드라이브 펌웨어 수정 버전 1.125 이상에 적용합니다.
IDN 이름 단위 형식 최소값 최대값
P:0:435 부하 관측기 가속 추정 가속32비트 부호 있는 정수
-2 31 2 31 -1
P:0:436 부하 관측기 토크 추정 토크16비트 부호 있는 정수
-2 15 2 15 -1
22 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
1장 배경
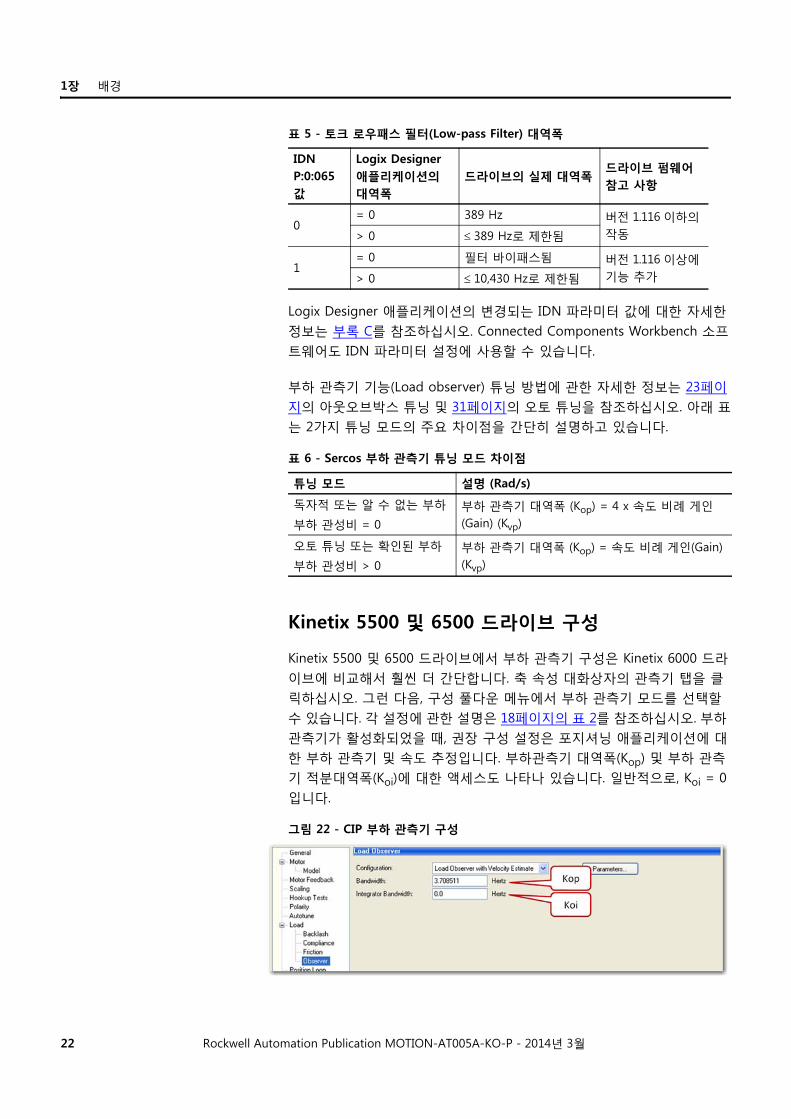
표 5 - 토크 로우패스 필터(Low-pass Filter) 대역폭
Logix Designer 애플리케이션의 변경되는 IDN 파라미터 값에 대한 자세한
정보는 부록 C를 참조하십시오. Connected Components Workbench 소프
트웨어도 IDN 파라미터 설정에 사용할 수 있습니다.
부하 관측기 기능(Load observer) 튜닝 방법에 관한 자세한 정보는 23페이
지의 아웃오브박스 튜닝 및 31페이지의 오토 튜닝을 참조하십시오. 아래 표
는 2가지 튜닝 모드의 주요 차이점을 간단히 설명하고 있습니다.
표 6 - Sercos 부하 관측기 튜닝 모드 차이점
Kinetix 5500 및 6500 드라이브 구성
Kinetix 5500 및 6500 드라이브에서 부하 관측기 구성은 Kinetix 6000 드라
이브에 비교해서 훨씬 더 간단합니다. 축 속성 대화상자의 관측기 탭을 클
릭하십시오. 그런 다음, 구성 풀다운 메뉴에서 부하 관측기 모드를 선택할
수 있습니다. 각 설정에 관한 설명은 18페이지의 표 2를 참조하십시오. 부하
관측기가 활성화되었을 때, 권장 구성 설정은 포지셔닝 애플리케이션에 대
한 부하 관측기 및 속도 추정입니다. 부하관측기 대역폭(Kop) 및 부하 관측
기 적분대역폭(Koi)에 대한 액세스도 나타나 있습니다. 일반적으로, Koi = 0
입니다.
그림 22 - CIP 부하 관측기 구성
IDN P:0:065 값
Logix Designer 애플리케이션의 대역폭
드라이브의 실제 대역폭드라이브 펌웨어 참고 사항
0= 0 389 Hz 버전 1.116 이하의
작동> 0 389 Hz로 제한됨
1= 0 필터 바이패스됨 버전 1.116 이상에
기능 추가> 0 10,430 Hz로 제한됨
튜닝 모드 설명 (Rad/s)
독자적 또는 알 수 없는 부하
부하 관성비 = 0
부하 관측기 대역폭 (Kop) = 4 x 속도 비례 게인(Gain) (Kvp)
오토 튜닝 또는 확인된 부하
부하 관성비 > 0
부하 관측기 대역폭 (Kop) = 속도 비례 게인(Gain) (Kvp)
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 23
1장 배경
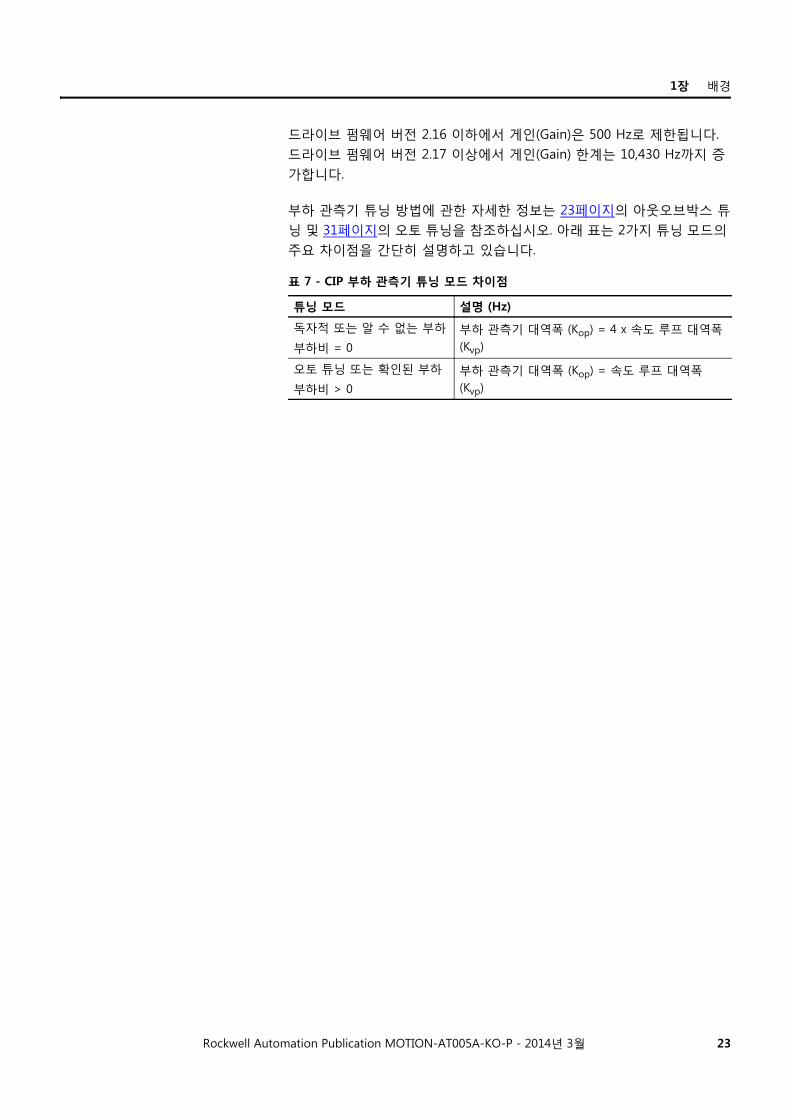
드라이브 펌웨어 버전 2.16 이하에서 게인(Gain)은 500 Hz로 제한됩니다.
드라이브 펌웨어 버전 2.17 이상에서 게인(Gain) 한계는 10,430 Hz까지 증
가합니다.
부하 관측기 튜닝 방법에 관한 자세한 정보는 23페이지의 아웃오브박스 튜
닝 및 31페이지의 오토 튜닝을 참조하십시오. 아래 표는 2가지 튜닝 모드의
주요 차이점을 간단히 설명하고 있습니다.
표 7 - CIP 부하 관측기 튜닝 모드 차이점
튜닝 모드 설명 (Hz)
독자적 또는 알 수 없는 부하
부하비 = 0
부하 관측기 대역폭 (Kop) = 4 x 속도 루프 대역폭 (Kvp)
오토 튜닝 또는 확인된 부하
부하비 > 0
부하 관측기 대역폭 (Kop) = 속도 루프 대역폭 (Kvp)

24 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
1장 배경
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 23
2 장
아웃오브박스 튜닝
‘아웃오브박스(Out-of-Box)’라는 뜻은 새 축이 생성될 때 이 축에 대해 미리
설정되는 기본 제어 루프 게인(Gain) 설정값을 말합니다. 이 시점에는 부하
를 알 수 없기 때문에, 모터는 무부하이며 부하비 R = 0이라고 가정합니다.
그러나, 부하를 알고 있거나 오토 튜닝을 수행한 경우, 부하비 R > 0입니다.
이 점이 최초 및 오토 튜닝 규칙에 영향을 미치는 주요 차이점입니다. 그러
므로, ‘아웃오브박스’라는 용어는 R = 0을, ‘오토 튜닝’은 R > 0을 뜻합니다.
이 장에서, 게인(Gain) 계산에 관한 부분은 새로운 축이 생성될 때 공개된
제품에서 현재 게인(Gain)이 어떻게 계산되는지 설명합니다. 그러나, 새 축
의 시운전에는 이 장에서 제시하는 아웃오브박스 권장 설정에 관한 부분을
시작 지점으로 사용해야 합니다. 이 설정으로 우수한 모션 성능이 산출되는
경우가 많으며 더 이상의 튜닝 간섭이 필요하지 않습니다.
Sercos Drives 아래 부분은 Sercos 드라이브의 아웃오브박스 튜닝에 관해 설명합니다.
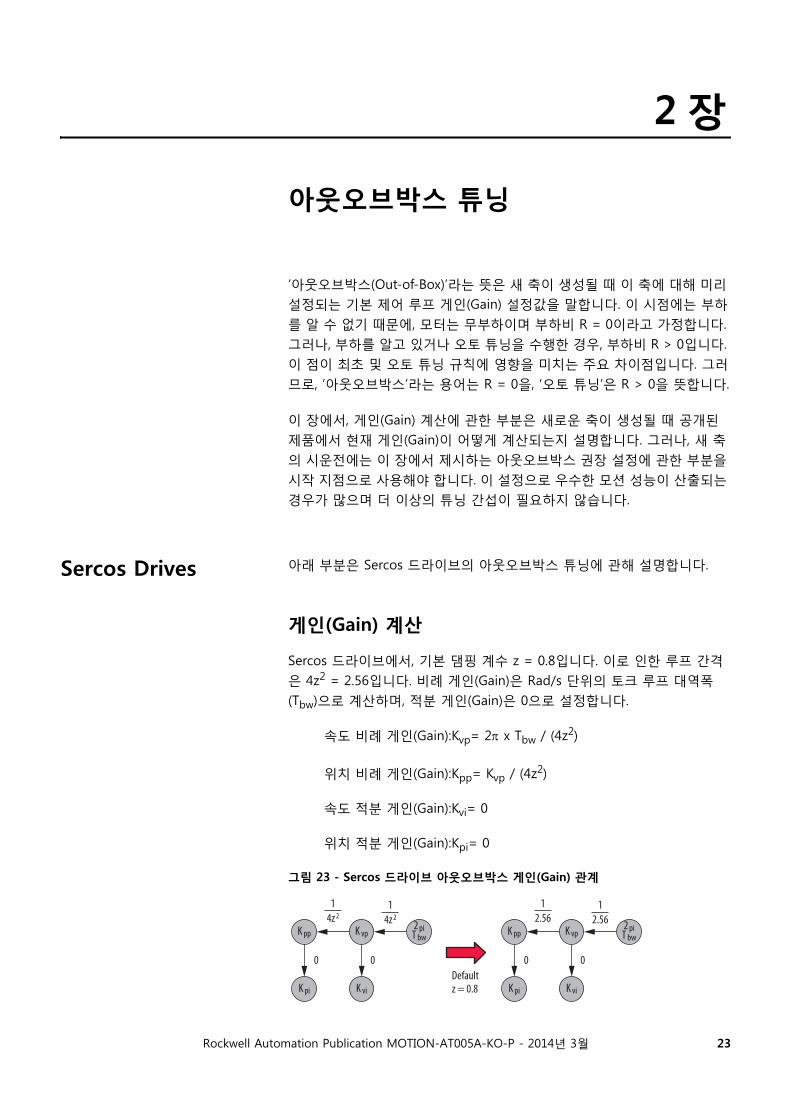
게인(Gain) 계산
Sercos 드라이브에서, 기본 댐핑 계수 z = 0.8입니다. 이로 인한 루프 간격
은 4z2 = 2.56입니다. 비례 게인(Gain)은 Rad/s 단위의 토크 루프 대역폭
(Tbw)으로 계산하며, 적분 게인(Gain)은 0으로 설정합니다.
속도 비례 게인(Gain):Kvp= 2 x Tbw / (4z2)
위치 비례 게인(Gain):Kpp= Kvp / (4z2)
속도 적분 게인(Gain):Kvi= 0
위치 적분 게인(Gain):Kpi= 0
그림 23 - Sercos 드라이브 아웃오브박스 게인(Gain) 관계
K pp
K pi K vi
K vp T bw
1
4z 2
1
4z 2
0 0
1
2.561
2.56
0 0
Default z = 0.8
K pp
K pi K vi
K vp2 pi
T bw
2 pi
24 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
2장 아웃오브박스 튜닝
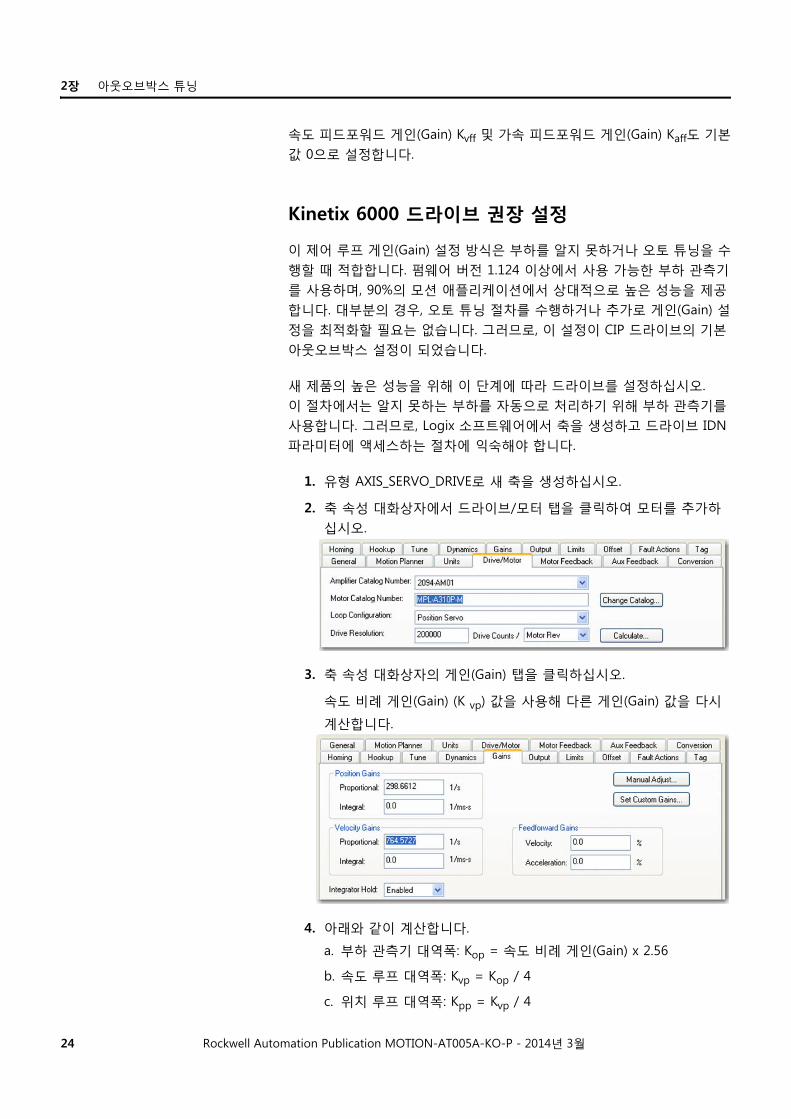
속도 피드포워드 게인(Gain) Kvff 및 가속 피드포워드 게인(Gain) Kaff도 기본
값 0으로 설정합니다.
Kinetix 6000 드라이브 권장 설정
이 제어 루프 게인(Gain) 설정 방식은 부하를 알지 못하거나 오토 튜닝을 수
행할 때 적합합니다. 펌웨어 버전 1.124 이상에서 사용 가능한 부하 관측기
를 사용하며, 90%의 모션 애플리케이션에서 상대적으로 높은 성능을 제공
합니다. 대부분의 경우, 오토 튜닝 절차를 수행하거나 추가로 게인(Gain) 설
정을 최적화할 필요는 없습니다. 그러므로, 이 설정이 CIP 드라이브의 기본
아웃오브박스 설정이 되었습니다.
새 제품의 높은 성능을 위해 이 단계에 따라 드라이브를 설정하십시오.
이 절차에서는 알지 못하는 부하를 자동으로 처리하기 위해 부하 관측기를
사용합니다. 그러므로, Logix 소프트웨어에서 축을 생성하고 드라이브 IDN
파라미터에 액세스하는 절차에 익숙해야 합니다.
1. 유형 AXIS_SERVO_DRIVE로 새 축을 생성하십시오.
2. 축 속성 대화상자에서 드라이브/모터 탭을 클릭하여 모터를 추가하
십시오.
3. 축 속성 대화상자의 게인(Gain) 탭을 클릭하십시오.
속도 비례 게인(Gain) (K vp) 값을 사용해 다른 게인(Gain) 값을 다시
계산합니다.
4. 아래와 같이 계산합니다.
a. 부하 관측기 대역폭: Kop = 속도 비례 게인(Gain) x 2.56
b. 속도 루프 대역폭: Kvp = Kop / 4
c. 위치 루프 대역폭: Kpp = Kvp / 4
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 25
2장 아웃오브박스 튜닝
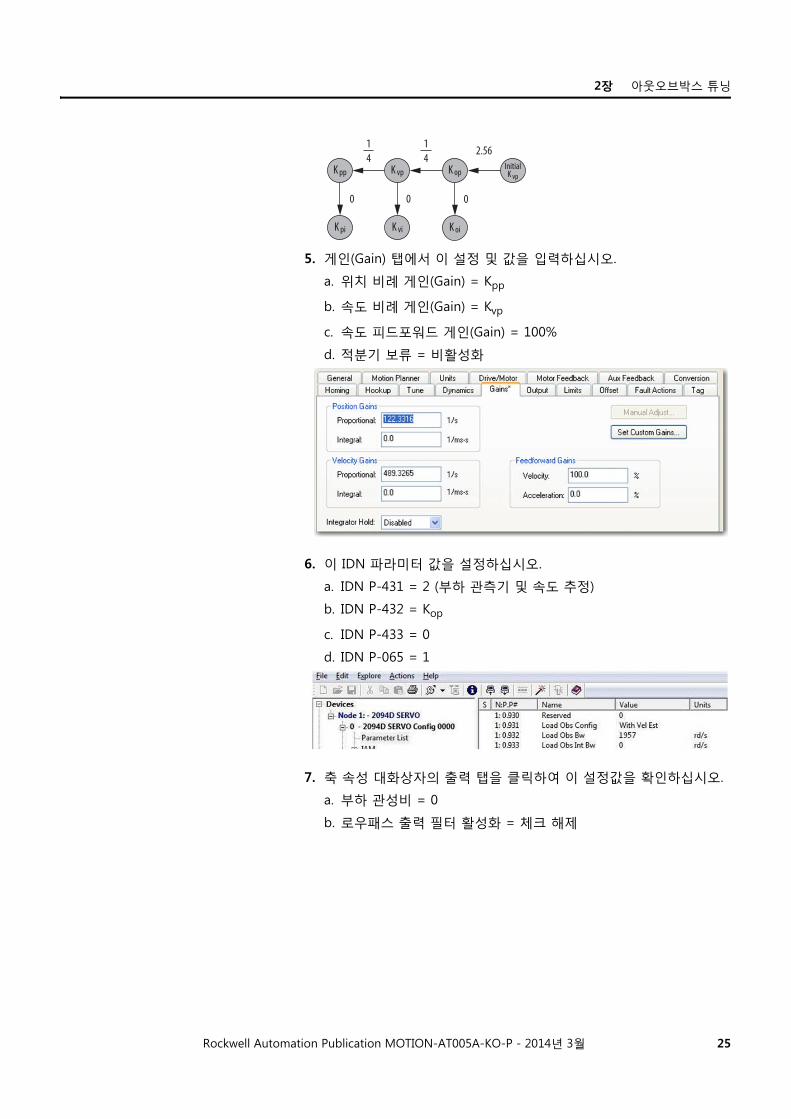
5. 게인(Gain) 탭에서 이 설정 및 값을 입력하십시오.
a. 위치 비례 게인(Gain) = Kpp
b. 속도 비례 게인(Gain) = Kvp
c. 속도 피드포워드 게인(Gain) = 100%
d. 적분기 보류 = 비활성화
6. 이 IDN 파라미터 값을 설정하십시오.
a. IDN P-431 = 2 (부하 관측기 및 속도 추정)
b. IDN P-432 = Kop
c. IDN P-433 = 0
d. IDN P-065 = 1
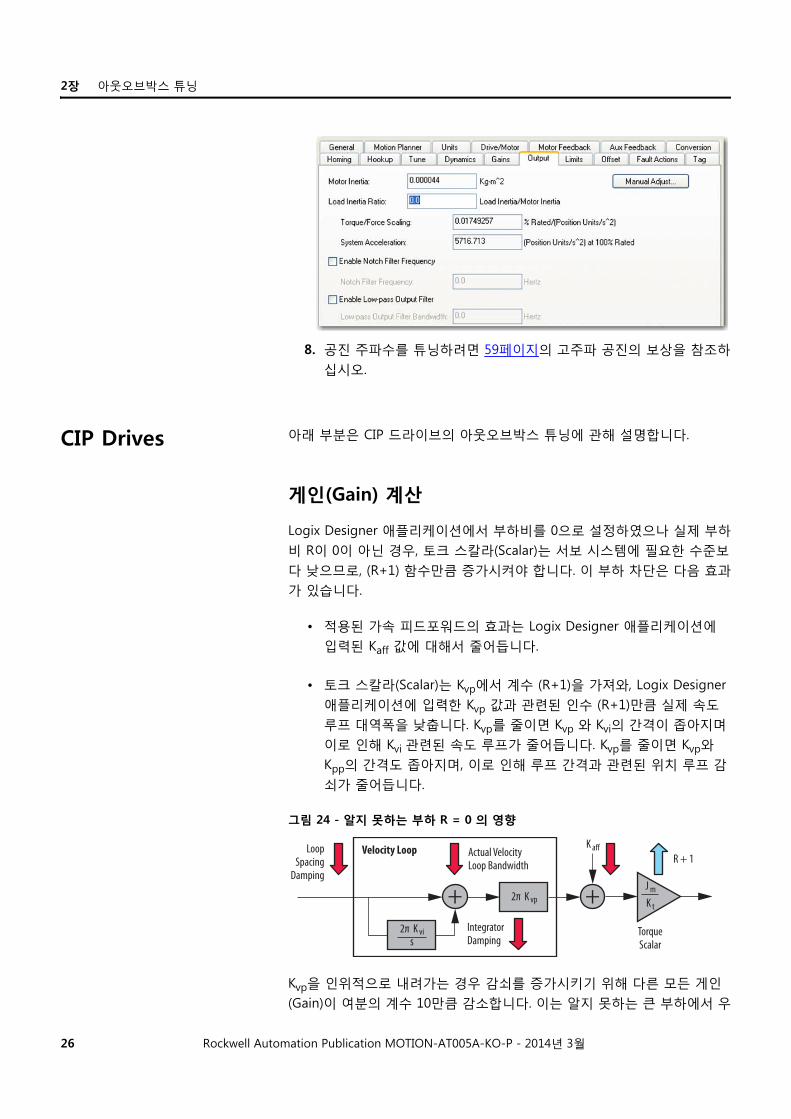
7. 축 속성 대화상자의 출력 탭을 클릭하여 이 설정값을 확인하십시오.
a. 부하 관성비 = 0
b. 로우패스 출력 필터 활성화 = 체크 해제
1
4
1
4
0 0 0
2.56
K vp
InitialK pp
K pi K vi
K vp K op
K oi
26 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
2장 아웃오브박스 튜닝
8. 공진 주파수를 튜닝하려면 59페이지의 고주파 공진의 보상을 참조하
십시오.
CIP Drives 아래 부분은 CIP 드라이브의 아웃오브박스 튜닝에 관해 설명합니다.
게인(Gain) 계산
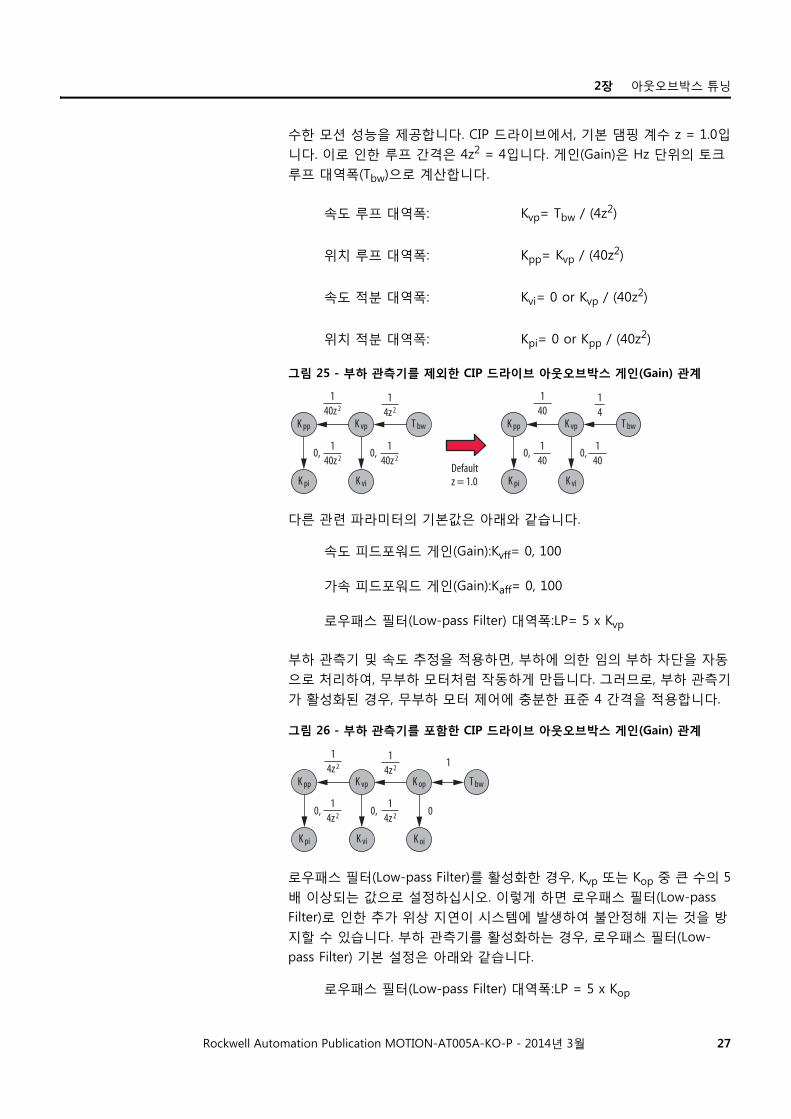
Logix Designer 애플리케이션에서 부하비를 0으로 설정하였으나 실제 부하
비 R이 0이 아닌 경우, 토크 스칼라(Scalar)는 서보 시스템에 필요한 수준보
다 낮으므로, (R+1) 함수만큼 증가시켜야 합니다. 이 부하 차단은 다음 효과
가 있습니다.
• 적용된 가속 피드포워드의 효과는 Logix Designer 애플리케이션에
입력된 Kaff 값에 대해서 줄어듭니다.
• 토크 스칼라(Scalar)는 Kvp에서 계수 (R+1)을 가져와, Logix Designer
애플리케이션에 입력한 Kvp 값과 관련된 인수 (R+1)만큼 실제 속도
루프 대역폭을 낮춥니다. Kvp를 줄이면 Kvp 와 Kvi의 간격이 좁아지며
이로 인해 Kvi 관련된 속도 루프가 줄어듭니다. Kvp를 줄이면 Kvp와
Kpp의 간격도 좁아지며, 이로 인해 루프 간격과 관련된 위치 루프 감
쇠가 줄어듭니다.
그림 24 - 알지 못하는 부하 R = 0 의 영향
Kvp을 인위적으로 내려가는 경우 감쇠를 증가시키기 위해 다른 모든 게인
(Gain)이 여분의 계수 10만큼 감소합니다. 이는 알지 못하는 큰 부하에서 우
Velocity Loop Actual Velocity Loop Bandwidth
R + 1
Integrator Damping
TorqueScalar
LoopSpacing
Damping
+ K vp2π
sK vi2π
+
K aff
K t
J m
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 27
2장 아웃오브박스 튜닝
수한 모션 성능을 제공합니다. CIP 드라이브에서, 기본 댐핑 계수 z = 1.0입
니다. 이로 인한 루프 간격은 4z2 = 4입니다. 게인(Gain)은 Hz 단위의 토크
루프 대역폭(Tbw)으로 계산합니다.
속도 루프 대역폭: Kvp= Tbw / (4z2)
위치 루프 대역폭: Kpp= Kvp / (40z2)
속도 적분 대역폭: Kvi= 0 or Kvp / (40z2)
위치 적분 대역폭: Kpi= 0 or Kpp / (40z2)
그림 25 - 부하 관측기를 제외한 CIP 드라이브 아웃오브박스 게인(Gain) 관계
다른 관련 파라미터의 기본값은 아래와 같습니다.
속도 피드포워드 게인(Gain):Kvff= 0, 100
가속 피드포워드 게인(Gain):Kaff= 0, 100
로우패스 필터(Low-pass Filter) 대역폭:LP= 5 x Kvp
부하 관측기 및 속도 추정을 적용하면, 부하에 의한 임의 부하 차단을 자동
으로 처리하여, 무부하 모터처럼 작동하게 만듭니다. 그러므로, 부하 관측기
가 활성화된 경우, 무부하 모터 제어에 충분한 표준 4 간격을 적용합니다.
그림 26 - 부하 관측기를 포함한 CIP 드라이브 아웃오브박스 게인(Gain) 관계
로우패스 필터(Low-pass Filter)를 활성화한 경우, Kvp 또는 Kop 중 큰 수의 5
배 이상되는 값으로 설정하십시오. 이렇게 하면 로우패스 필터(Low-pass
Filter)로 인한 추가 위상 지연이 시스템에 발생하여 불안정해 지는 것을 방
지할 수 있습니다. 부하 관측기를 활성화하는 경우, 로우패스 필터(Low-
pass Filter) 기본 설정은 아래와 같습니다.
로우패스 필터(Low-pass Filter) 대역폭:LP = 5 x Kop
1
40z 2
1
40z 2
1
40z 2
1
4z 2
0, 0,
1
40
1
40
1
40
1
4
0, 0,
Default z = 1.0
K pp
K pi K vi
K vp T bw K pp
K pi K vi
K vp T bw
1
4z 2
1
4z 2
1
4z 2
1
4z 20, 0, 0
1
K pp
K pi K vi
K vp
K oi
K op T bw
28 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
2장 아웃오브박스 튜닝
Kinetix 5500 및 6500 드라이브 권장 설정
이 제어 루프 게인(Gain) 설정 방식은 부하를 알지 못하거나 오토 튜닝을 수
행할 때 적합합니다. 이 방법은 부하 관측기를 사용하며 90%의 모션 애플
리케이션에서 상대적으로 높은 성능을 제공합니다. 대부분의 경우, 오토 튜
닝 절차를 수행하거나 추가로 게인(Gain) 설정을 최적화할 필요는 없습니다
. 그러므로, 이 설정이 CIP 드라이브의 기본 아웃오브박스 설정이 되었습니
다.
새 제품의 높은 성능을 위해 이 단계에 따라 드라이브를 설정하십시오.
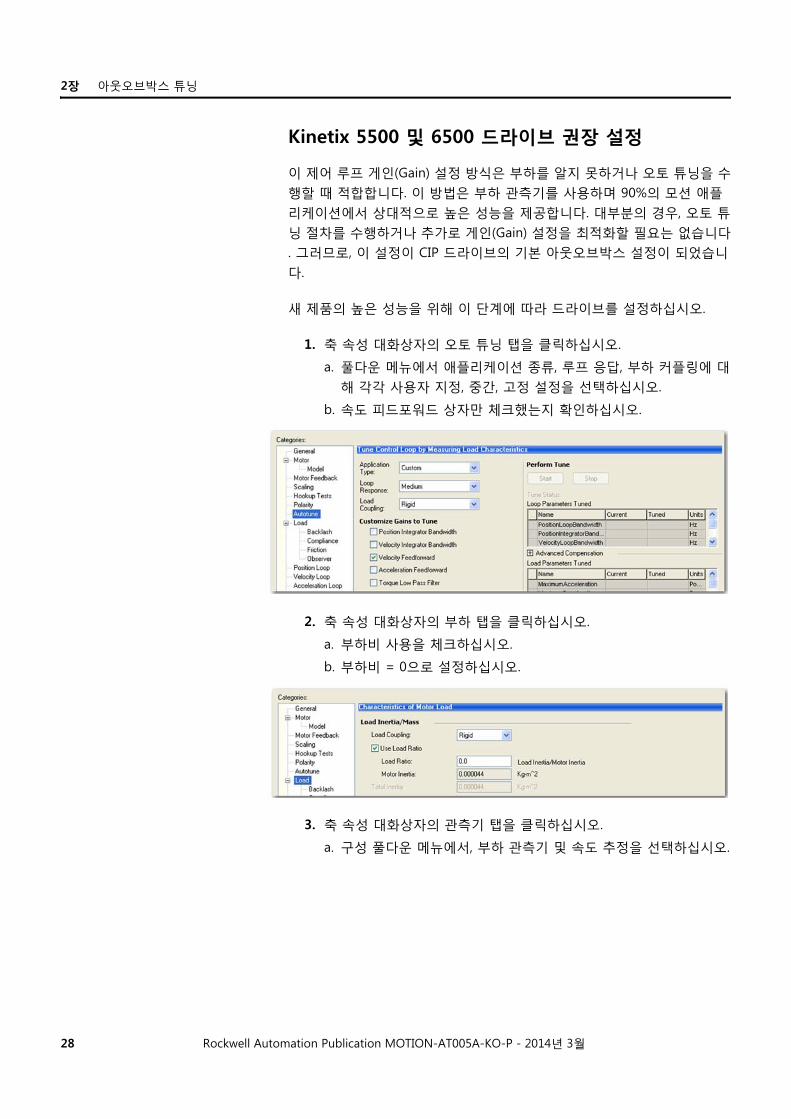
1. 축 속성 대화상자의 오토 튜닝 탭을 클릭하십시오.
a. 풀다운 메뉴에서 애플리케이션 종류, 루프 응답, 부하 커플링에 대
해 각각 사용자 지정, 중간, 고정 설정을 선택하십시오.
b. 속도 피드포워드 상자만 체크했는지 확인하십시오.
2. 축 속성 대화상자의 부하 탭을 클릭하십시오.
a. 부하비 사용을 체크하십시오.
b. 부하비 = 0으로 설정하십시오.
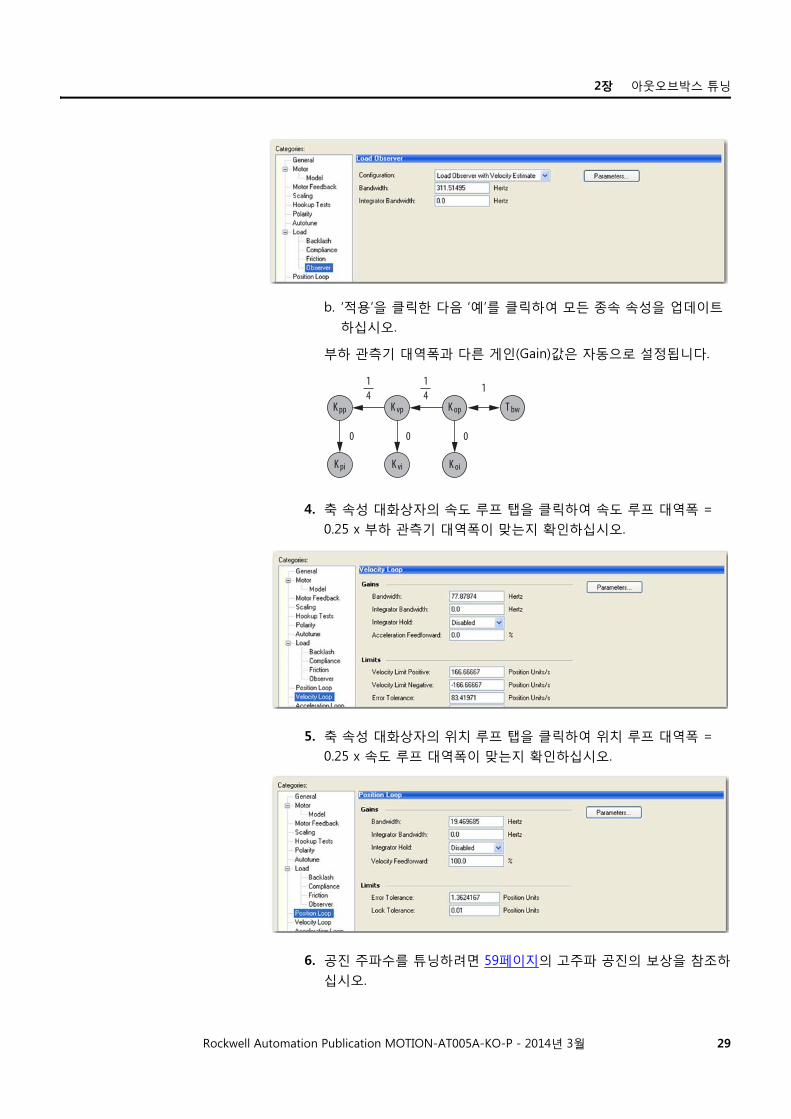
3. 축 속성 대화상자의 관측기 탭을 클릭하십시오.
a. 구성 풀다운 메뉴에서, 부하 관측기 및 속도 추정을 선택하십시오.
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 29
2장 아웃오브박스 튜닝
b. ‘적용’을 클릭한 다음 ‘예’를 클릭하여 모든 종속 속성을 업데이트
하십시오.
부하 관측기 대역폭과 다른 게인(Gain)값은 자동으로 설정됩니다.
4. 축 속성 대화상자의 속도 루프 탭을 클릭하여 속도 루프 대역폭 =
0.25 x 부하 관측기 대역폭이 맞는지 확인하십시오.
5. 축 속성 대화상자의 위치 루프 탭을 클릭하여 위치 루프 대역폭 =
0.25 x 속도 루프 대역폭이 맞는지 확인하십시오.
6. 공진 주파수를 튜닝하려면 59페이지의 고주파 공진의 보상을 참조하
십시오.
1
4
1
4
0 0 0
1
K pp
K pi K vi
K vp
K oi
K op T bw
30 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
2장 아웃오브박스 튜닝
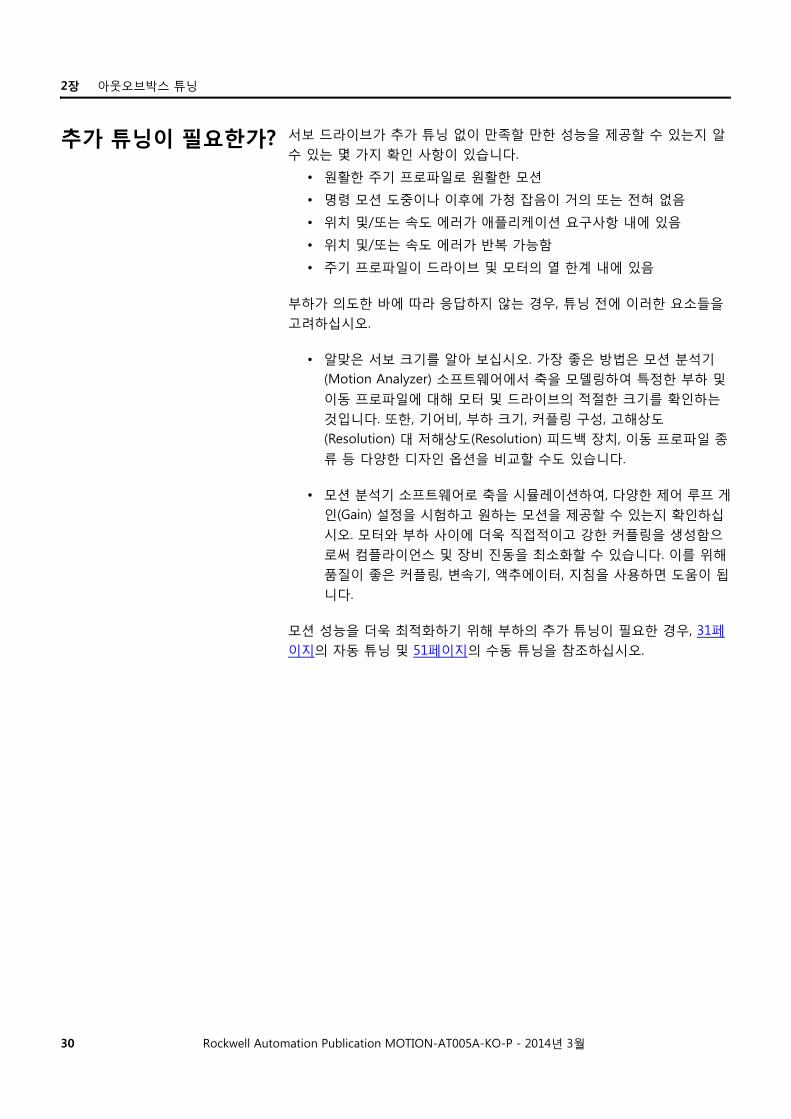
추가 튜닝이 필요한가? 서보 드라이브가 추가 튜닝 없이 만족할 만한 성능을 제공할 수 있는지 알
수 있는 몇 가지 확인 사항이 있습니다.
• 원활한 주기 프로파일로 원활한 모션
• 명령 모션 도중이나 이후에 가청 잡음이 거의 또는 전혀 없음
• 위치 및/또는 속도 에러가 애플리케이션 요구사항 내에 있음
• 위치 및/또는 속도 에러가 반복 가능함
• 주기 프로파일이 드라이브 및 모터의 열 한계 내에 있음
부하가 의도한 바에 따라 응답하지 않는 경우, 튜닝 전에 이러한 요소들을
고려하십시오.
• 알맞은 서보 크기를 알아 보십시오. 가장 좋은 방법은 모션 분석기
(Motion Analyzer) 소프트웨어에서 축을 모델링하여 특정한 부하 및
이동 프로파일에 대해 모터 및 드라이브의 적절한 크기를 확인하는
것입니다. 또한, 기어비, 부하 크기, 커플링 구성, 고해상도
(Resolution) 대 저해상도(Resolution) 피드백 장치, 이동 프로파일 종
류 등 다양한 디자인 옵션을 비교할 수도 있습니다.
• 모션 분석기 소프트웨어로 축을 시뮬레이션하여, 다양한 제어 루프 게
인(Gain) 설정을 시험하고 원하는 모션을 제공할 수 있는지 확인하십
시오. 모터와 부하 사이에 더욱 직접적이고 강한 커플링을 생성함으
로써 컴플라이언스 및 장비 진동을 최소화할 수 있습니다. 이를 위해
품질이 좋은 커플링, 변속기, 액추에이터, 지침을 사용하면 도움이 됩
니다.
모션 성능을 더욱 최적화하기 위해 부하의 추가 튜닝이 필요한 경우, 31페
이지의 자동 튜닝 및 51페이지의 수동 튜닝을 참조하십시오.
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 31
3 장
오토 튜닝
‘아웃오브박스(Out-of-Box)’라는 뜻은 새 축이 생성될 때 이 축에 대해 미리
설정되는 기본 제어 루프 게인(Gain) 설정값을 말합니다. 이 시점에는 부하
를 알 수 없기 때문에, 모터는 무부하이며 부하비 R = 0이라고 가정합니다.
그러나, 부하를 알고 있거나 오토 튜닝을 수행한 경우, 부하비 R > 0입니다.
이 점이 최초 및 오토 튜닝 규칙에 영향을 미치는 주요 차이점입니다. 그러
므로, ‘아웃오브박스’라는 용어는 R = 0을, ‘오토 튜닝’은 R > 0을 뜻합니다.
오토 튜닝은 사용자의 개입을 최소한으로 하면서 두 가지 기본 기능을 자동
으로 수행합니다.
• 오토 튜닝은 부하비(R)를 측정하기 위해 ‘충격 시험(Bump Test)’에서
일시적으로 모션을 시작합니다. 그러면 R로 토크 스칼라(Scalar) 및
시스템 가속이 계산됩니다. 그런 다음 이 파라미터로 축 역학 및 한계
가 계산됩니다.
• 토크 루프 대역폭(Tbw)을 기준으로 제어 루프 게인(Gain)이 계산되며,
이 대역폭은 드라이브 모델 시간 상수(DMTC)에서 계산하고, 다시 이
상수는 선택한 드라이브 및 모터를 기준으로 알아 냅니다.
Sercos 드라이브 아래 부분은 Sercos 드라이브의 오토 튜닝에 관해 설명합니다.
충격 시험(Bump Test)
오토 튜닝에서 충격 시험(Bump Test)을 수행할 때, 가속 및 감속 시간을 측
정하는 동안 순간 튜닝 토크를 모터에 적용합니다. 이 정보를 사용하여 부
하비(R), 토크 스칼라(Scalar), 시스템 관성을 계산합니다. 축 속성 대화상자
의 튜닝 탭에서 상단 4가지 파라미터를 사용하여 충격 시험(Bump Test) 중
모터와 부하를 특정한 위치, 속도, 가속, 방향 한계 내에 유지합니다.
32 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
3장 오토 튜닝
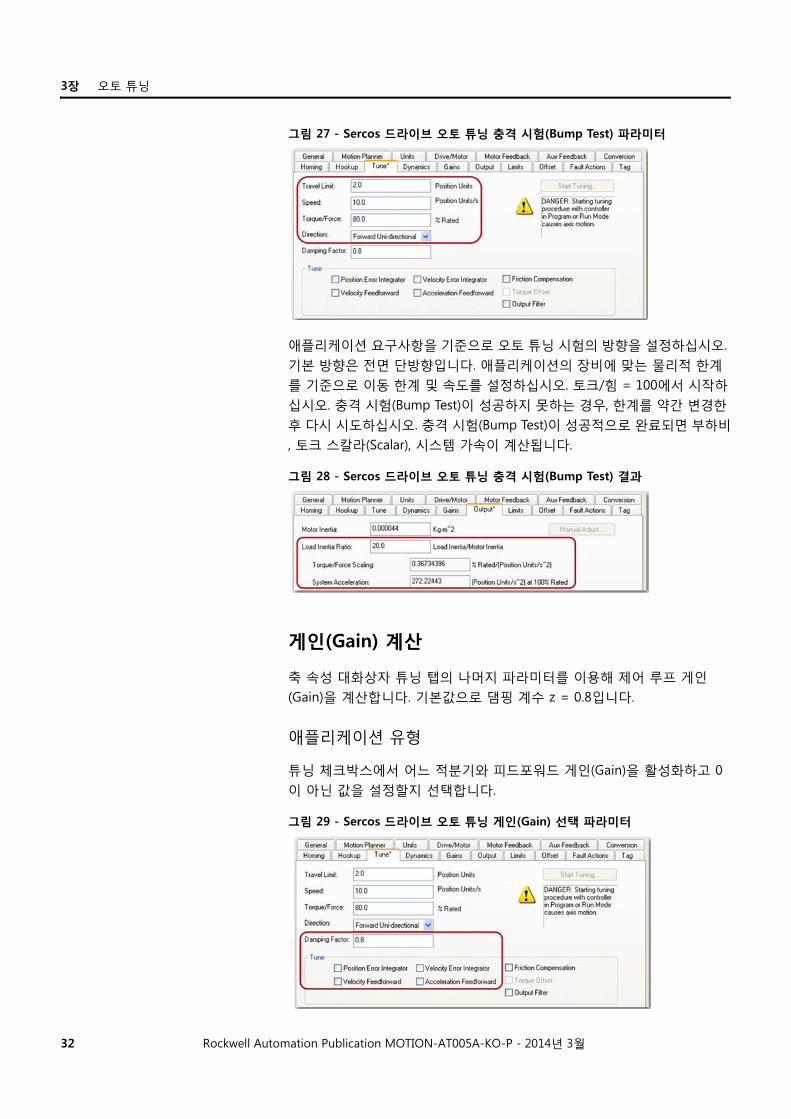
그림 27 - Sercos 드라이브 오토 튜닝 충격 시험(Bump Test) 파라미터
애플리케이션 요구사항을 기준으로 오토 튜닝 시험의 방향을 설정하십시오.
기본 방향은 전면 단방향입니다. 애플리케이션의 장비에 맞는 물리적 한계
를 기준으로 이동 한계 및 속도를 설정하십시오. 토크/힘 = 100에서 시작하
십시오. 충격 시험(Bump Test)이 성공하지 못하는 경우, 한계를 약간 변경한
후 다시 시도하십시오. 충격 시험(Bump Test)이 성공적으로 완료되면 부하비
, 토크 스칼라(Scalar), 시스템 가속이 계산됩니다.
그림 28 - Sercos 드라이브 오토 튜닝 충격 시험(Bump Test) 결과
게인(Gain) 계산
축 속성 대화상자 튜닝 탭의 나머지 파라미터를 이용해 제어 루프 게인
(Gain)을 계산합니다. 기본값으로 댐핑 계수 z = 0.8입니다.
애플리케이션 유형
튜닝 체크박스에서 어느 적분기와 피드포워드 게인(Gain)을 활성화하고 0
이 아닌 값을 설정할지 선택합니다.
그림 29 - Sercos 드라이브 오토 튜닝 게인(Gain) 선택 파라미터
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 33
3장 오토 튜닝
활성화할 적분기와 피드포워드 게인(Gain)을 조합하는 방식이 많이 있습니
다.
아래 표는 몇 가지 일반적인 애플리케이션 및 각각의 경우 어느 적분기와
피드포워드 게인(Gain)을 활성화할지 보여 주고 있습니다.
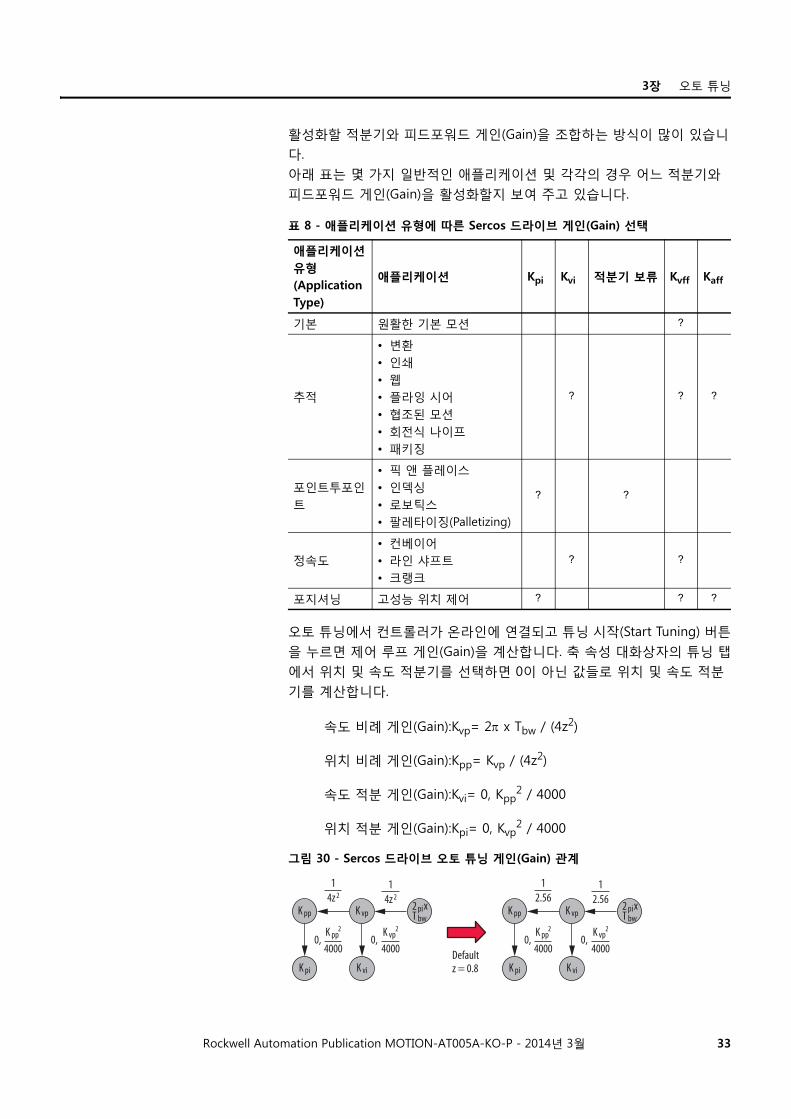
표 8 - 애플리케이션 유형에 따른 Sercos 드라이브 게인(Gain) 선택
오토 튜닝에서 컨트롤러가 온라인에 연결되고 튜닝 시작(Start Tuning) 버튼
을 누르면 제어 루프 게인(Gain)을 계산합니다. 축 속성 대화상자의 튜닝 탭
에서 위치 및 속도 적분기를 선택하면 0이 아닌 값들로 위치 및 속도 적분
기를 계산합니다.
속도 비례 게인(Gain):Kvp= 2 x Tbw / (4z2)
위치 비례 게인(Gain):Kpp= Kvp / (4z2)
속도 적분 게인(Gain):Kvi= 0, Kpp2 / 4000
위치 적분 게인(Gain):Kpi= 0, Kvp2 / 4000
그림 30 - Sercos 드라이브 오토 튜닝 게인(Gain) 관계
애플리케이션 유형(Application Type)
애플리케이션 Kpi Kvi 적분기 보류 Kvff Kaff
기본 원활한 기본 모션 ?
추적
• 변환• 인쇄• 웹• 플라잉 시어• 협조된 모션• 회전식 나이프• 패키징
? ? ?
포인트투포인트
• 픽 앤 플레이스• 인덱싱• 로보틱스• 팔레타이징(Palletizing)
? ?
정속도• 컨베이어• 라인 샤프트• 크랭크
? ?
포지셔닝 고성능 위치 제어 ? ? ?
1
4z 2
1
4z 2
0, 0,
x
1
2.561
2.56
0, 0,
Default z = 0.8
K pp2
4000
K vp2
4000
K pp
K pi K vi
K vp T bw
2 pi K pp
K pi K vi
K vp
K pp2
4000
K vp2
4000
xT bw
2 pi
34 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
3장 오토 튜닝
Sercos 드라이브에서 댐핑 계수는 적분기 간격을 제외한 루프 간격에 영향
을 줍니다. 강성(Rigid)(Rigid) 부하에는 루프 간격 4z2가 충분하지만, 규격
(Compliant)으로 분류되는 대부분의 부하에는 너무 열이 높을 수 있습니다.
그러므로, 제어 루프 게인(Gain)은 자주 디튜닝(de-tune)해야만 합니다. 다
른 관련 파라미터의 기본값은 아래와 같습니다.
속도 피드포워드 게인(Gain):Kvff= 0, 100
가속 피드포워드 게인(Gain):Kaff= 0, 100
로우패스 필터(Low-pass Filter) 대역폭:LP= 4 x Kvp / (2)
튜닝 시작
다음 절차에 따라 오토 튜닝을 실행하십시오. 오토 튜닝을 수행할 때 트렌
드를 같이 실행하면 좋습니다. 자세한 정보는 부록 B를 참조하십시오.
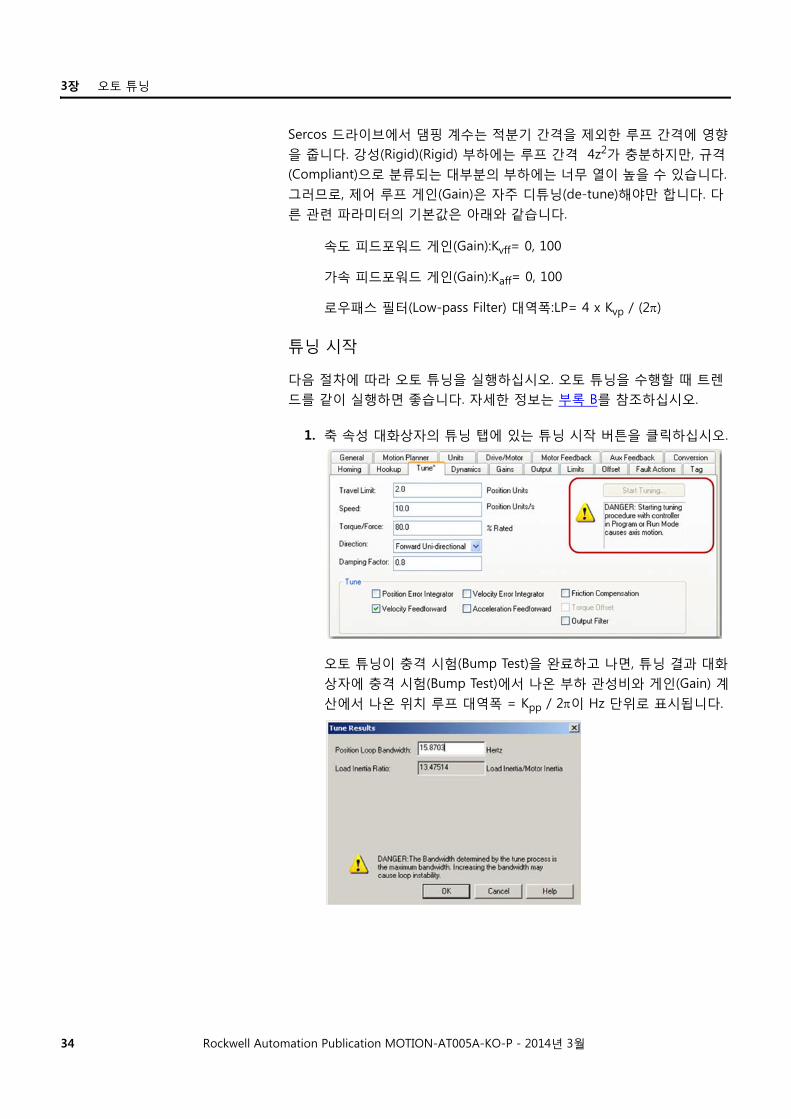
1. 축 속성 대화상자의 튜닝 탭에 있는 튜닝 시작 버튼을 클릭하십시오.
오토 튜닝이 충격 시험(Bump Test)을 완료하고 나면, 튜닝 결과 대화
상자에 충격 시험(Bump Test)에서 나온 부하 관성비와 게인(Gain) 계
산에서 나온 위치 루프 대역폭 = Kpp / 2이 Hz 단위로 표시됩니다.
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 35
3장 오토 튜닝
2. 이 때, 계산된 위치 루프 대역폭을 증가 또는 감소시켜 더 높거나 낮
은 값으로 게인(Gain)을 다시 계산할 수 있습니다.
대부분의 부하는 규격(Compliant)이지만 강성(Rigid)(Rigid) 부하에
대한 게인(Gain)은 자동 계산되므로, 위치 루프 대역폭을 반드시 낮추
어야 합니다. 부하가 규격(Compliant)일 경우 안정성을 확보하려면
부하 관성비로 나눈 수를 시작점으로 합니다.
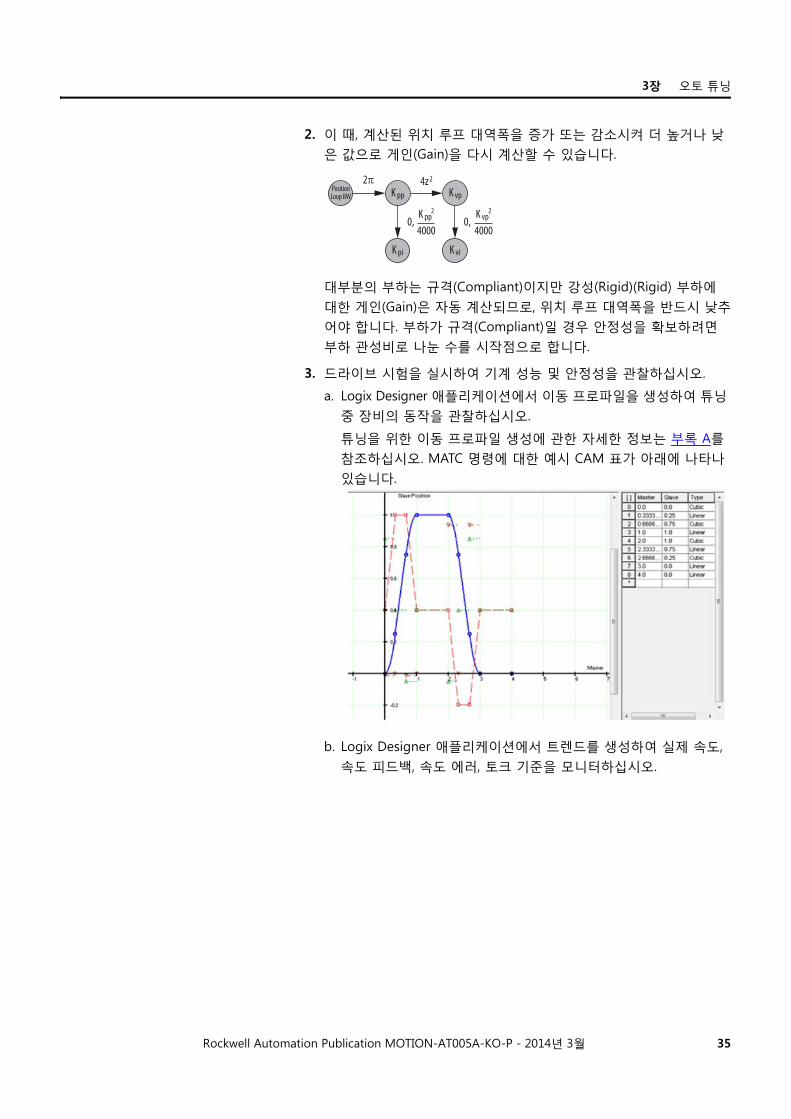
3. 드라이브 시험을 실시하여 기계 성능 및 안정성을 관찰하십시오.
a. Logix Designer 애플리케이션에서 이동 프로파일을 생성하여 튜닝
중 장비의 동작을 관찰하십시오.
튜닝을 위한 이동 프로파일 생성에 관한 자세한 정보는 부록 A를
참조하십시오. MATC 명령에 대한 예시 CAM 표가 아래에 나타나
있습니다.
b. Logix Designer 애플리케이션에서 트렌드를 생성하여 실제 속도,
속도 피드백, 속도 에러, 토크 기준을 모니터하십시오.
2π 4z 2
0, 0,
PositionLoop BW K pp
K pi K vi
K vp
K pp2
4000
K vp2
4000
36 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
3장 오토 튜닝
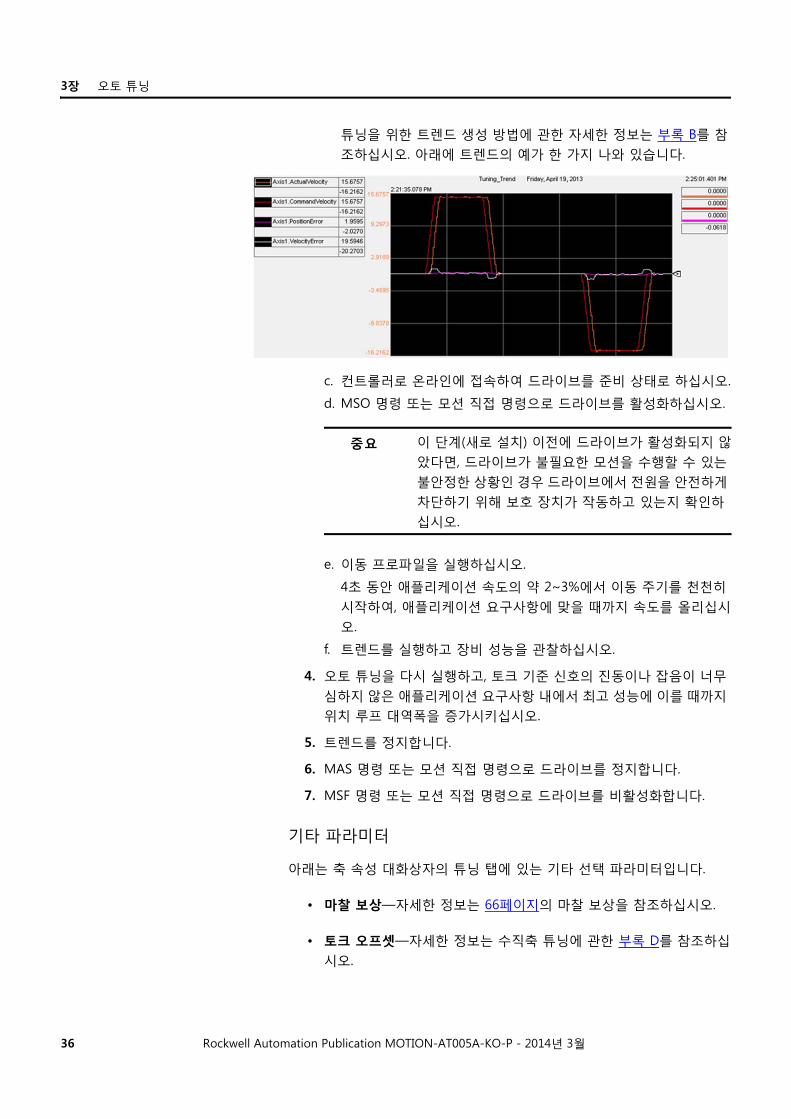
튜닝을 위한 트렌드 생성 방법에 관한 자세한 정보는 부록 B를 참
조하십시오. 아래에 트렌드의 예가 한 가지 나와 있습니다.
c. 컨트롤러로 온라인에 접속하여 드라이브를 준비 상태로 하십시오.
d. MSO 명령 또는 모션 직접 명령으로 드라이브를 활성화하십시오.
e. 이동 프로파일을 실행하십시오.
4초 동안 애플리케이션 속도의 약 2~3%에서 이동 주기를 천천히
시작하여, 애플리케이션 요구사항에 맞을 때까지 속도를 올리십시
오.
f. 트렌드를 실행하고 장비 성능을 관찰하십시오.
4. 오토 튜닝을 다시 실행하고, 토크 기준 신호의 진동이나 잡음이 너무
심하지 않은 애플리케이션 요구사항 내에서 최고 성능에 이를 때까지
위치 루프 대역폭을 증가시키십시오.
5. 트렌드를 정지합니다.
6. MAS 명령 또는 모션 직접 명령으로 드라이브를 정지합니다.
7. MSF 명령 또는 모션 직접 명령으로 드라이브를 비활성화합니다.
기타 파라미터
아래는 축 속성 대화상자의 튜닝 탭에 있는 기타 선택 파라미터입니다.
• 마찰 보상—자세한 정보는 66페이지의 마찰 보상을 참조하십시오.
• 토크 오프셋—자세한 정보는 수직축 튜닝에 관한 부록 D를 참조하십
시오.
중요 이 단계(새로 설치) 이전에 드라이브가 활성화되지 않
았다면, 드라이브가 불필요한 모션을 수행할 수 있는
불안정한 상황인 경우 드라이브에서 전원을 안전하게
차단하기 위해 보호 장치가 작동하고 있는지 확인하
십시오.
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 37
3장 오토 튜닝
• 출력 필터—이 체크박스는 로우패스 출력 필터를 활성화시킵니다.
노치 필터(Notch Filter)와 함께 사용해 진동 잡음 및 고주파 공진을 억
제합니다.
자세한 정보는 59페이지의 고주파 공진의 보상을 참조하십시오.
오토 튜닝이 활성화되면, 로우패스 출력 필터 주파수(LP)를 Hz 단위로
계산합니다.
로우패스 필터(Low-pass Filter) 대역폭:LP = 4 x Kvp / (2)
• 적분기 보류—적분기 보류를 활성화하면, 속도 명령은 0이 아닐 때
서보 루프가 위치 및 속도 적분기를 임시로 비활성화시킵니다. 이 기
능은 모션 중 적분기 포화 및 위상 지연을 최소화하기 위해 포인트포
인트 이동에 사용합니다.
적분기 보류를 비활성화하면, 모든 활성 위치 및 속도 적분기가 활성화됩니다.
Kinetix 6000 드라이브 권장 설정
이 절차는 오토 튜닝을 실행한 후 부하 관측기 기능(Load observer)을 설정
하는 내용입니다. 이 방식은 부하 관성비를 알고 있거나 수동으로 계산한 경
우, 즉 부하 관성비가 0보다 클 때, 모든 기존 게인(Gain)에 적합합니다. 권
장 아웃오브박스 설정을 우선 적용해 보는 것이 좋습니다.
1. 축 속성 대화상자의 튜닝 탭을 클릭하여 오토 튜닝을 수행하십시오.
관성 부하가 변동적인 경우, 기계 관성이 가장 낮은 지점에서 오토 튜
닝을 수행합니다. 수동으로 부하 관성비를 계산한 경우, 최소 부하 관
성을 사용합니다.
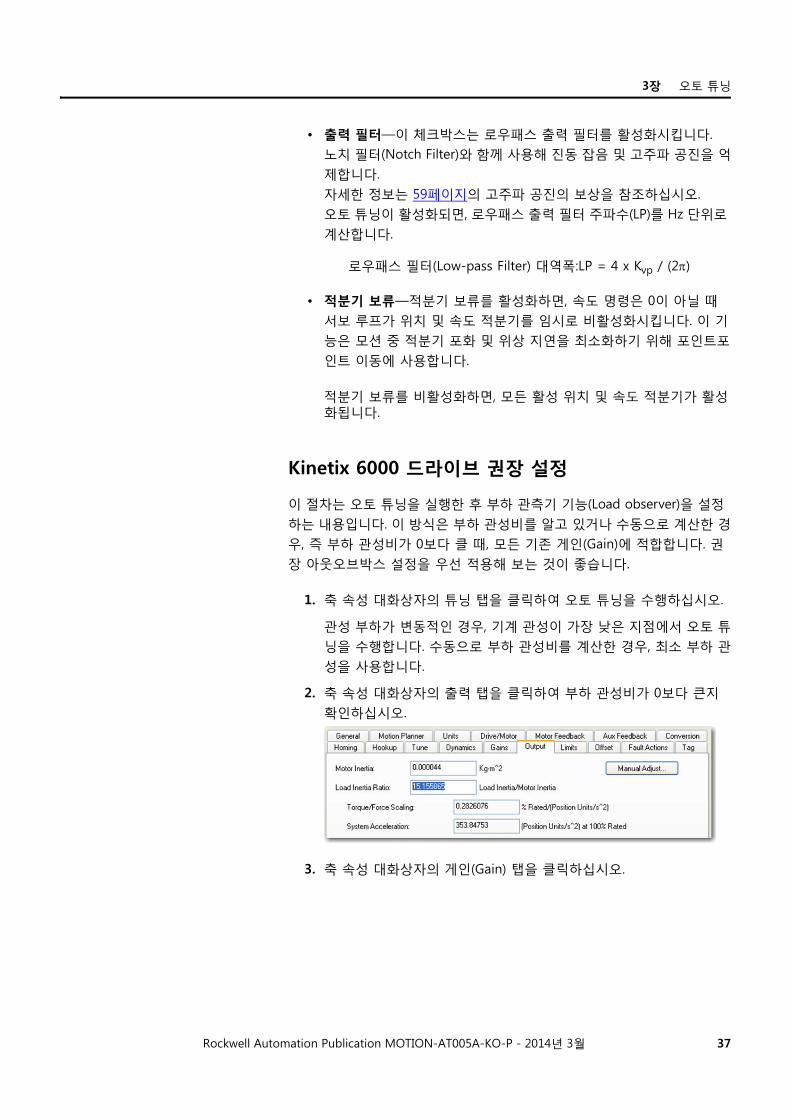
2. 축 속성 대화상자의 출력 탭을 클릭하여 부하 관성비가 0보다 큰지
확인하십시오.
3. 축 속성 대화상자의 게인(Gain) 탭을 클릭하십시오.
38 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
3장 오토 튜닝
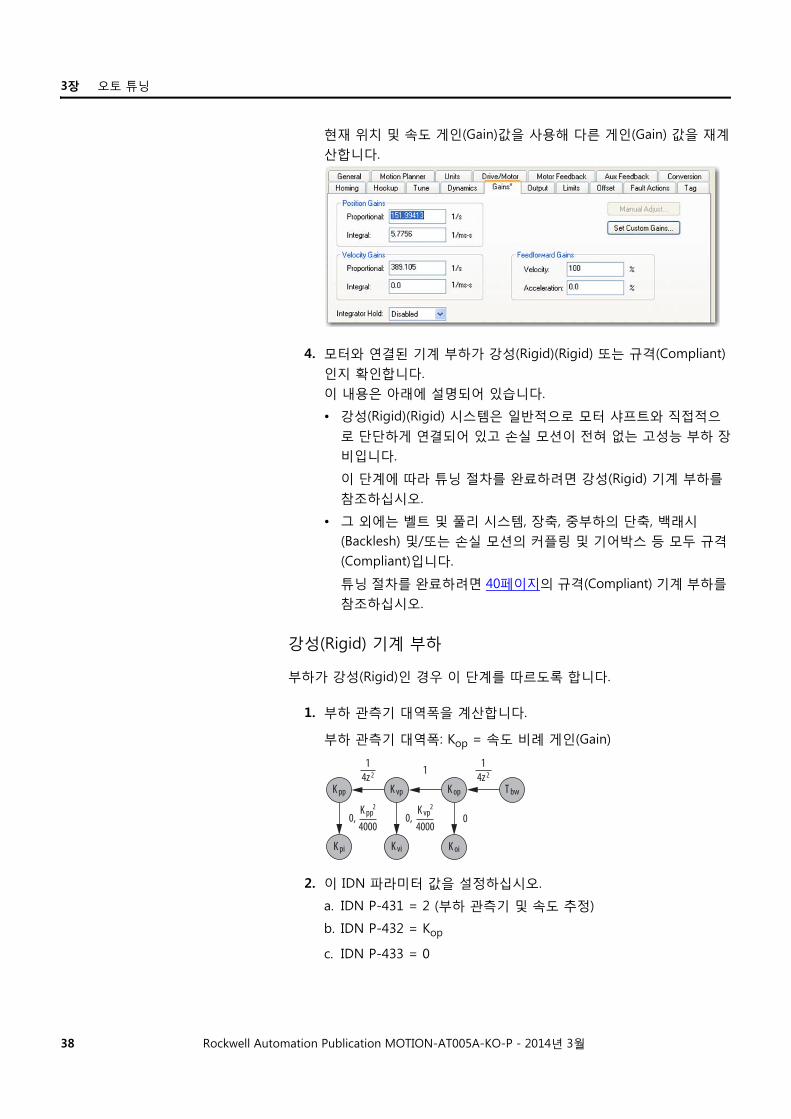
현재 위치 및 속도 게인(Gain)값을 사용해 다른 게인(Gain) 값을 재계
산합니다.
4. 모터와 연결된 기계 부하가 강성(Rigid)(Rigid) 또는 규격(Compliant)
인지 확인합니다.
이 내용은 아래에 설명되어 있습니다.
• 강성(Rigid)(Rigid) 시스템은 일반적으로 모터 샤프트와 직접적으
로 단단하게 연결되어 있고 손실 모션이 전혀 없는 고성능 부하 장
비입니다.
이 단계에 따라 튜닝 절차를 완료하려면 강성(Rigid) 기계 부하를
참조하십시오.
• 그 외에는 벨트 및 풀리 시스템, 장축, 중부하의 단축, 백래시
(Backlesh) 및/또는 손실 모션의 커플링 및 기어박스 등 모두 규격
(Compliant)입니다.
튜닝 절차를 완료하려면 40페이지의 규격(Compliant) 기계 부하를
참조하십시오.
강성(Rigid) 기계 부하
부하가 강성(Rigid)인 경우 이 단계를 따르도록 합니다.
1. 부하 관측기 대역폭을 계산합니다.
부하 관측기 대역폭: Kop = 속도 비례 게인(Gain)
2. 이 IDN 파라미터 값을 설정하십시오.
a. IDN P-431 = 2 (부하 관측기 및 속도 추정)
b. IDN P-432 = Kop
c. IDN P-433 = 0
0
11
4z 2
1
4z 2
0, 0,
K pp
K pi K vi
K vp
K oi
K op
K pp2
4000
K vp2
4000
T bw
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 39
3장 오토 튜닝
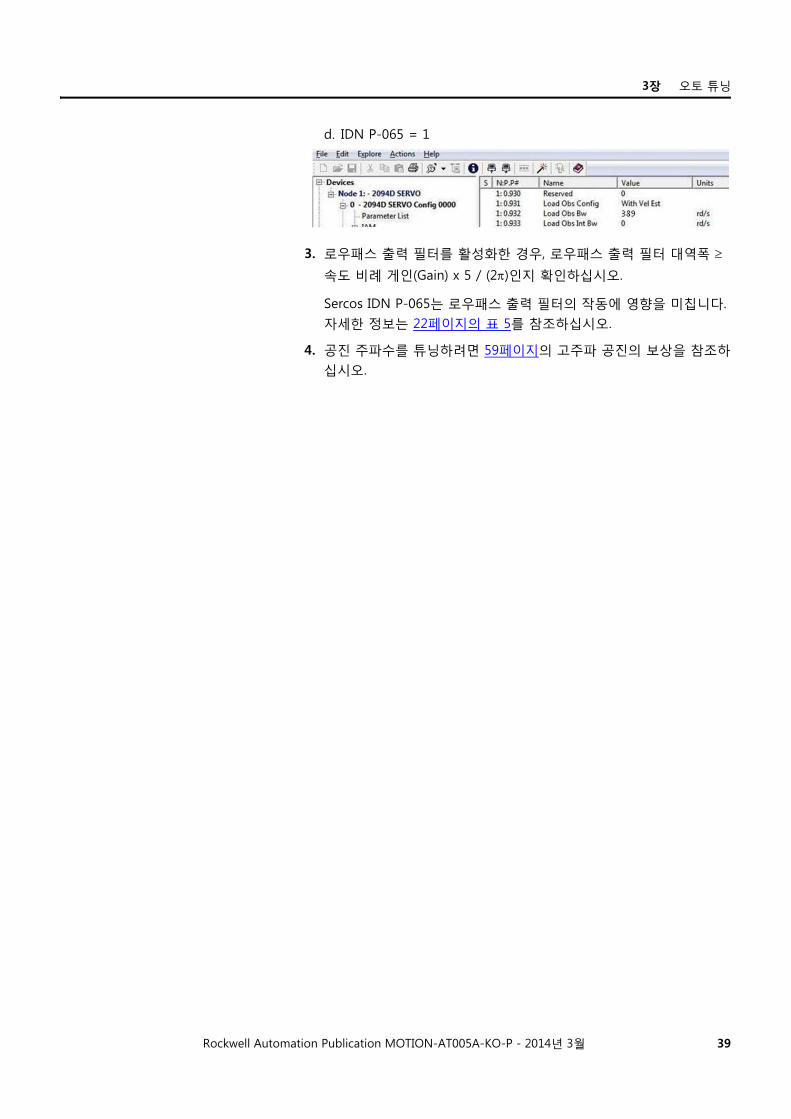
d. IDN P-065 = 1
3. 로우패스 출력 필터를 활성화한 경우, 로우패스 출력 필터 대역폭
속도 비례 게인(Gain) x 5 / (2)인지 확인하십시오.
Sercos IDN P-065는 로우패스 출력 필터의 작동에 영향을 미칩니다.
자세한 정보는 22페이지의 표 5를 참조하십시오.
4. 공진 주파수를 튜닝하려면 59페이지의 고주파 공진의 보상을 참조하
십시오.
40 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
3장 오토 튜닝
규격(Compliant) 기계 부하
규격(Compliant) 설정은 모든 게인(Gain)을 계수(부하 관성비 +1)만큼 감소
시킨 다음 부하 관측기 대역폭을 계산합니다. 일반적으로, 이렇게 감소시킨
것은 너무 보수적이며, 루프 응답이 너무 느려지고 에러가 많아집니다. 단,
안정성은 확보됩니다.
부하가 규격(Compliant)인 경우 이 단계를 따르도록 합니다.
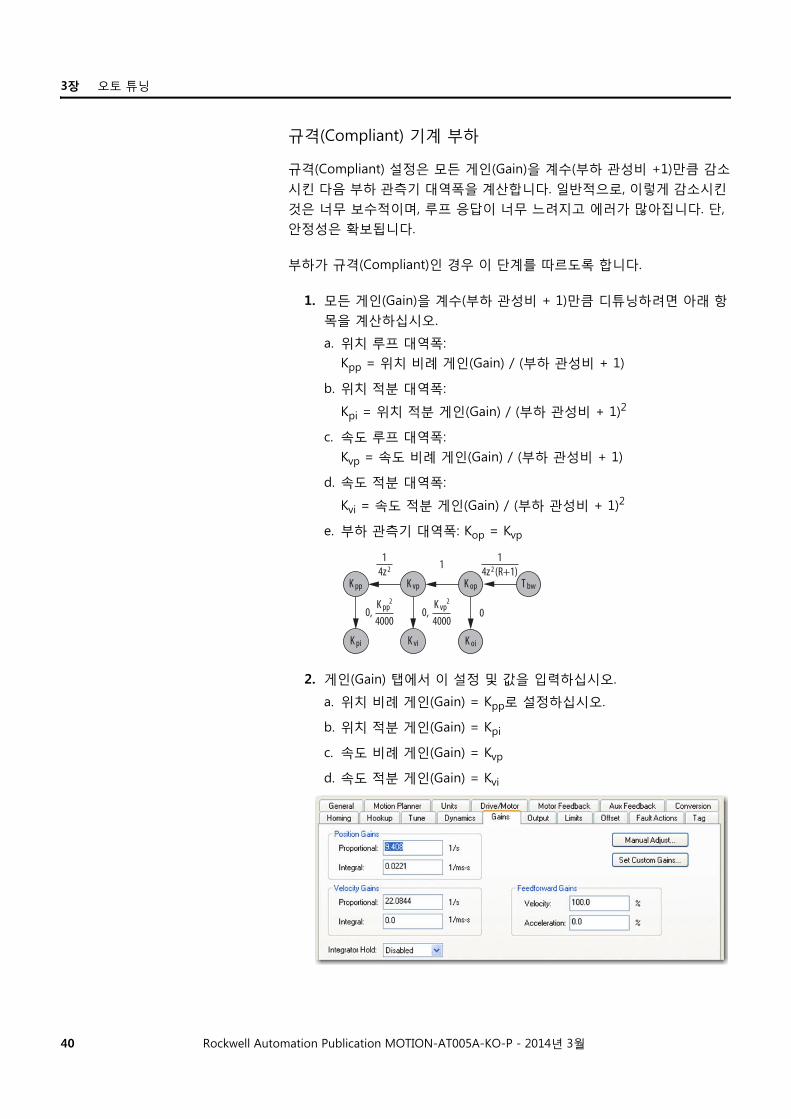
1. 모든 게인(Gain)을 계수(부하 관성비 + 1)만큼 디튜닝하려면 아래 항
목을 계산하십시오.
a. 위치 루프 대역폭:
Kpp = 위치 비례 게인(Gain) / (부하 관성비 + 1)
b. 위치 적분 대역폭:
Kpi = 위치 적분 게인(Gain) / (부하 관성비 + 1)2
c. 속도 루프 대역폭:
Kvp = 속도 비례 게인(Gain) / (부하 관성비 + 1)
d. 속도 적분 대역폭:
Kvi = 속도 적분 게인(Gain) / (부하 관성비 + 1)2
e. 부하 관측기 대역폭: Kop = Kvp
2. 게인(Gain) 탭에서 이 설정 및 값을 입력하십시오.
a. 위치 비례 게인(Gain) = Kpp로 설정하십시오.
b. 위치 적분 게인(Gain) = Kpi
c. 속도 비례 게인(Gain) = Kvp
d. 속도 적분 게인(Gain) = Kvi
0
11
4z 2
1
4z (R+1)2
0, 0,
K pp
K pi K vi
K vp
K oi
K op
K pp2
4000
K vp2
4000
T bw
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 41
3장 오토 튜닝
수동으로 게인(Gain)을 계수만큼 증가시켜 응답을 최적화하려면, 51
페이지의 수동 튜닝을 참조하십시오.
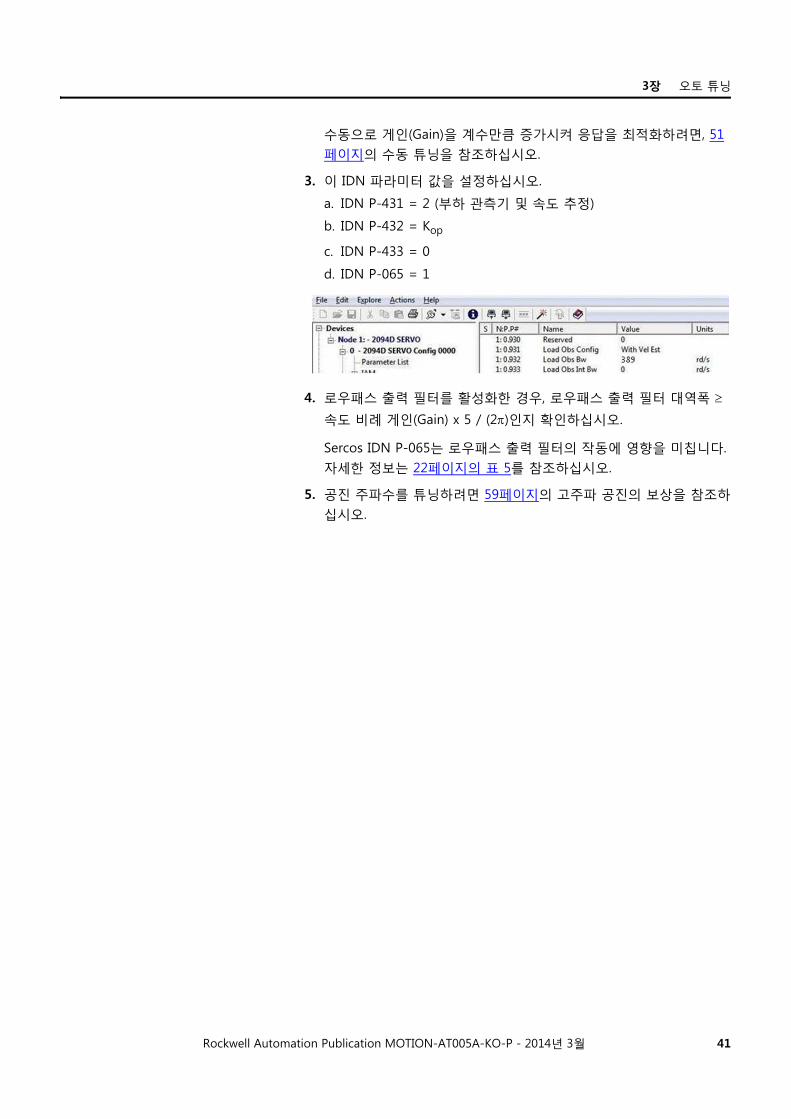
3. 이 IDN 파라미터 값을 설정하십시오.
a. IDN P-431 = 2 (부하 관측기 및 속도 추정)
b. IDN P-432 = Kop
c. IDN P-433 = 0
d. IDN P-065 = 1
4. 로우패스 출력 필터를 활성화한 경우, 로우패스 출력 필터 대역폭
속도 비례 게인(Gain) x 5 / (2)인지 확인하십시오.
Sercos IDN P-065는 로우패스 출력 필터의 작동에 영향을 미칩니다.
자세한 정보는 22페이지의 표 5를 참조하십시오.
5. 공진 주파수를 튜닝하려면 59페이지의 고주파 공진의 보상을 참조하
십시오.
42 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
3장 오토 튜닝
CIP 드라이브 아래 부분은 CIP 드라이브의 오토 튜닝에 관해 설명합니다.
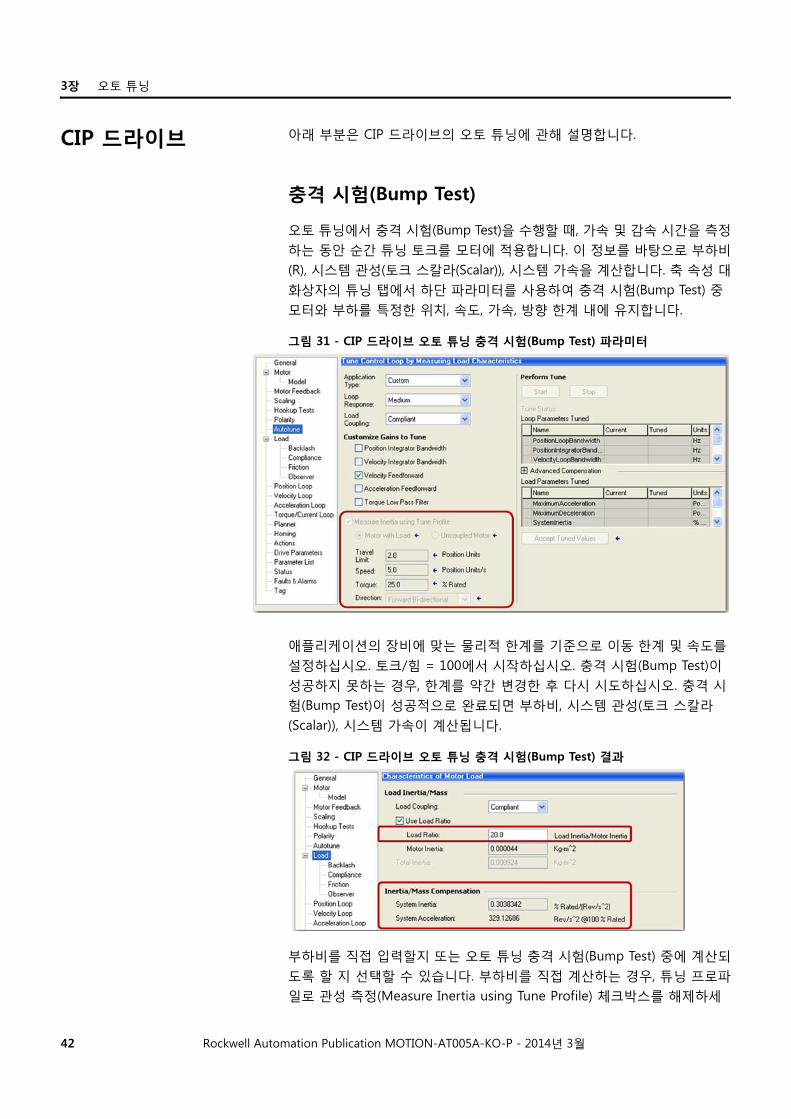
충격 시험(Bump Test)
오토 튜닝에서 충격 시험(Bump Test)을 수행할 때, 가속 및 감속 시간을 측정
하는 동안 순간 튜닝 토크를 모터에 적용합니다. 이 정보를 바탕으로 부하비
(R), 시스템 관성(토크 스칼라(Scalar)), 시스템 가속을 계산합니다. 축 속성 대
화상자의 튜닝 탭에서 하단 파라미터를 사용하여 충격 시험(Bump Test) 중
모터와 부하를 특정한 위치, 속도, 가속, 방향 한계 내에 유지합니다.
그림 31 - CIP 드라이브 오토 튜닝 충격 시험(Bump Test) 파라미터
애플리케이션의 장비에 맞는 물리적 한계를 기준으로 이동 한계 및 속도를
설정하십시오. 토크/힘 = 100에서 시작하십시오. 충격 시험(Bump Test)이
성공하지 못하는 경우, 한계를 약간 변경한 후 다시 시도하십시오. 충격 시
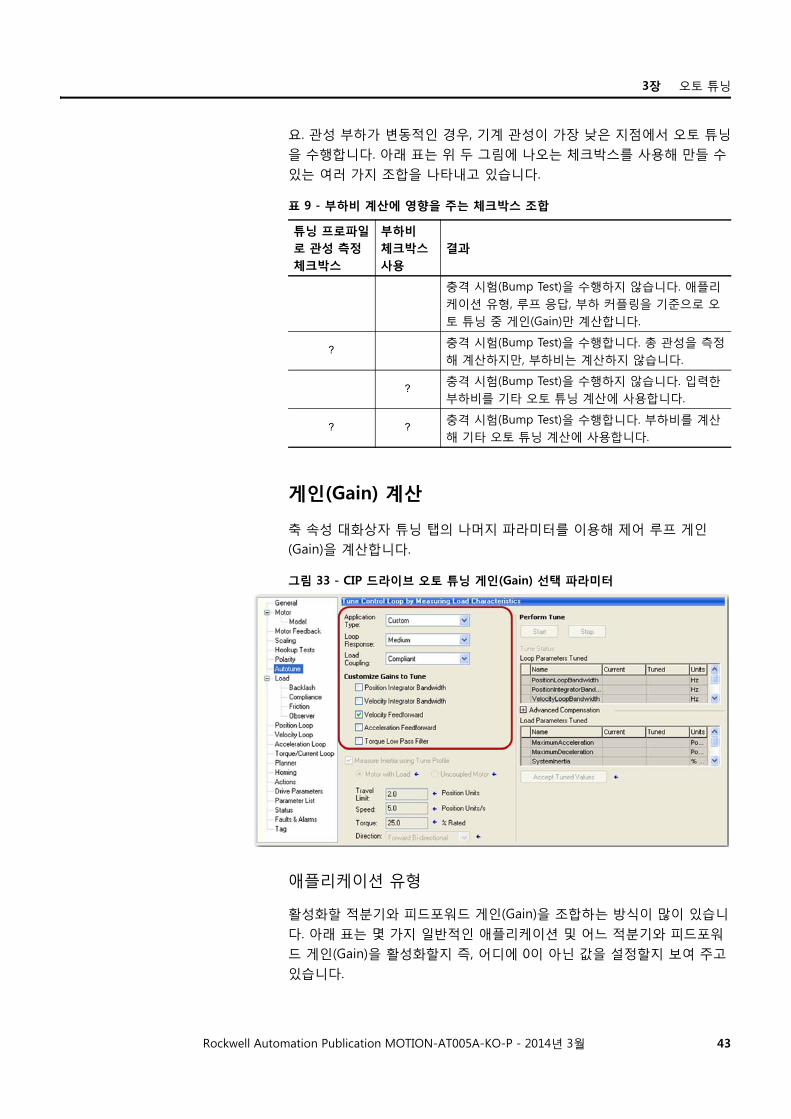
험(Bump Test)이 성공적으로 완료되면 부하비, 시스템 관성(토크 스칼라
(Scalar)), 시스템 가속이 계산됩니다.
그림 32 - CIP 드라이브 오토 튜닝 충격 시험(Bump Test) 결과
부하비를 직접 입력할지 또는 오토 튜닝 충격 시험(Bump Test) 중에 계산되
도록 할 지 선택할 수 있습니다. 부하비를 직접 계산하는 경우, 튜닝 프로파
일로 관성 측정(Measure Inertia using Tune Profile) 체크박스를 해제하세
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 43
3장 오토 튜닝
요. 관성 부하가 변동적인 경우, 기계 관성이 가장 낮은 지점에서 오토 튜닝
을 수행합니다. 아래 표는 위 두 그림에 나오는 체크박스를 사용해 만들 수
있는 여러 가지 조합을 나타내고 있습니다.
표 9 - 부하비 계산에 영향을 주는 체크박스 조합
게인(Gain) 계산
축 속성 대화상자 튜닝 탭의 나머지 파라미터를 이용해 제어 루프 게인
(Gain)을 계산합니다.
그림 33 - CIP 드라이브 오토 튜닝 게인(Gain) 선택 파라미터
애플리케이션 유형
활성화할 적분기와 피드포워드 게인(Gain)을 조합하는 방식이 많이 있습니
다. 아래 표는 몇 가지 일반적인 애플리케이션 및 어느 적분기와 피드포워
드 게인(Gain)을 활성화할지 즉, 어디에 0이 아닌 값을 설정할지 보여 주고
있습니다.
튜닝 프로파일로 관성 측정 체크박스
부하비 체크박스 사용
결과
충격 시험(Bump Test)을 수행하지 않습니다. 애플리케이션 유형, 루프 응답, 부하 커플링을 기준으로 오토 튜닝 중 게인(Gain)만 계산합니다.
?충격 시험(Bump Test)을 수행합니다. 총 관성을 측정해 계산하지만, 부하비는 계산하지 않습니다.
?충격 시험(Bump Test)을 수행하지 않습니다. 입력한 부하비를 기타 오토 튜닝 계산에 사용합니다.
? ?충격 시험(Bump Test)을 수행합니다. 부하비를 계산해 기타 오토 튜닝 계산에 사용합니다.
44 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
3장 오토 튜닝
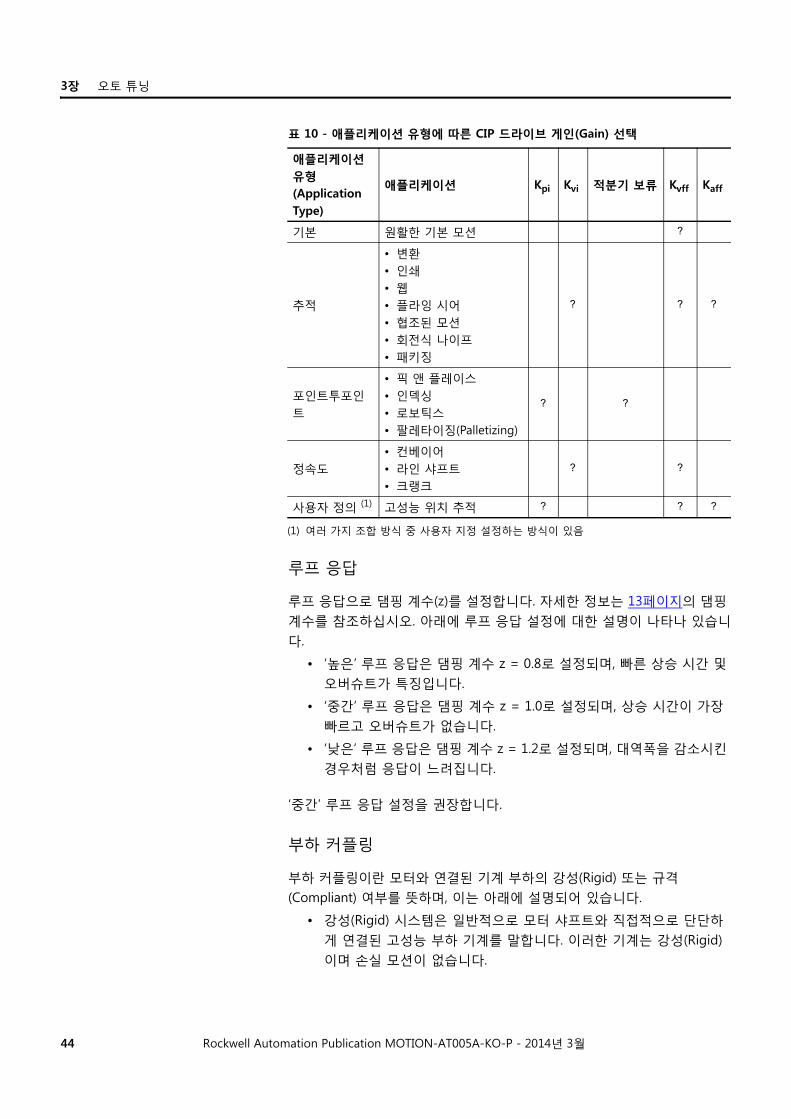
표 10 - 애플리케이션 유형에 따른 CIP 드라이브 게인(Gain) 선택
루프 응답
루프 응답으로 댐핑 계수(z)를 설정합니다. 자세한 정보는 13페이지의 댐핑
계수를 참조하십시오. 아래에 루프 응답 설정에 대한 설명이 나타나 있습니
다.
• ‘높은’ 루프 응답은 댐핑 계수 z = 0.8로 설정되며, 빠른 상승 시간 및
오버슈트가 특징입니다.
• ‘중간’ 루프 응답은 댐핑 계수 z = 1.0로 설정되며, 상승 시간이 가장
빠르고 오버슈트가 없습니다.
• ‘낮은’ 루프 응답은 댐핑 계수 z = 1.2로 설정되며, 대역폭을 감소시킨
경우처럼 응답이 느려집니다.
‘중간’ 루프 응답 설정을 권장합니다.
부하 커플링
부하 커플링이란 모터와 연결된 기계 부하의 강성(Rigid) 또는 규격
(Compliant) 여부를 뜻하며, 이는 아래에 설명되어 있습니다.
• 강성(Rigid) 시스템은 일반적으로 모터 샤프트와 직접적으로 단단하
게 연결된 고성능 부하 기계를 말합니다. 이러한 기계는 강성(Rigid)
이며 손실 모션이 없습니다.
애플리케이션 유형(Application Type)
애플리케이션 Kpi Kvi 적분기 보류 Kvff Kaff
기본 원활한 기본 모션 ?
추적
• 변환• 인쇄• 웹• 플라잉 시어• 협조된 모션• 회전식 나이프• 패키징
? ? ?
포인트투포인트
• 픽 앤 플레이스• 인덱싱• 로보틱스• 팔레타이징(Palletizing)
? ?
정속도• 컨베이어• 라인 샤프트• 크랭크
? ?
사용자 정의 (1)
(1) 여러 가지 조합 방식 중 사용자 지정 설정하는 방식이 있음
고성능 위치 추적 ? ? ?
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 45
3장 오토 튜닝
• 그 외에 벨트 및 풀리 시스템, 장축, 중부하의 단축, 백래시(Backlesh)
및/또는 손실 모션의 커플링 및 기어박스 등은 모두 규격(Compliant)
입니다.
강성(Rigid) 커플링—강성(Rigid) 부하에는 루프 간격 4z2가 충분합니다. 그
러므로 오토 튜닝은 아래 제어 루프 게인(Gain) 계산을 수행합니다. 기본값
으로 댐핑 계수 z = 1.0입니다.
그림 34 - 부하 관측기 게인(Gain)을 제외한 CIP 드라이브 오토 튜닝 강성(Rigid) 관계
축 속성 대화상자의 관측기 탭에서 부하 관측기를 활성화했을 때, 오토 튜
닝은 강성(Rigid) 부하 커플링에 대해 아래 제어 루프 게인(Gain) 계산을 수
행합니다.
모든 오토 튜닝 규칙에서 Kop = Kvp임을 유의하십시오.
그림 35 - CIP 드라이브 오토 튜닝 강성(Rigid) 및 부하 관측기 게인(Gain) 관계
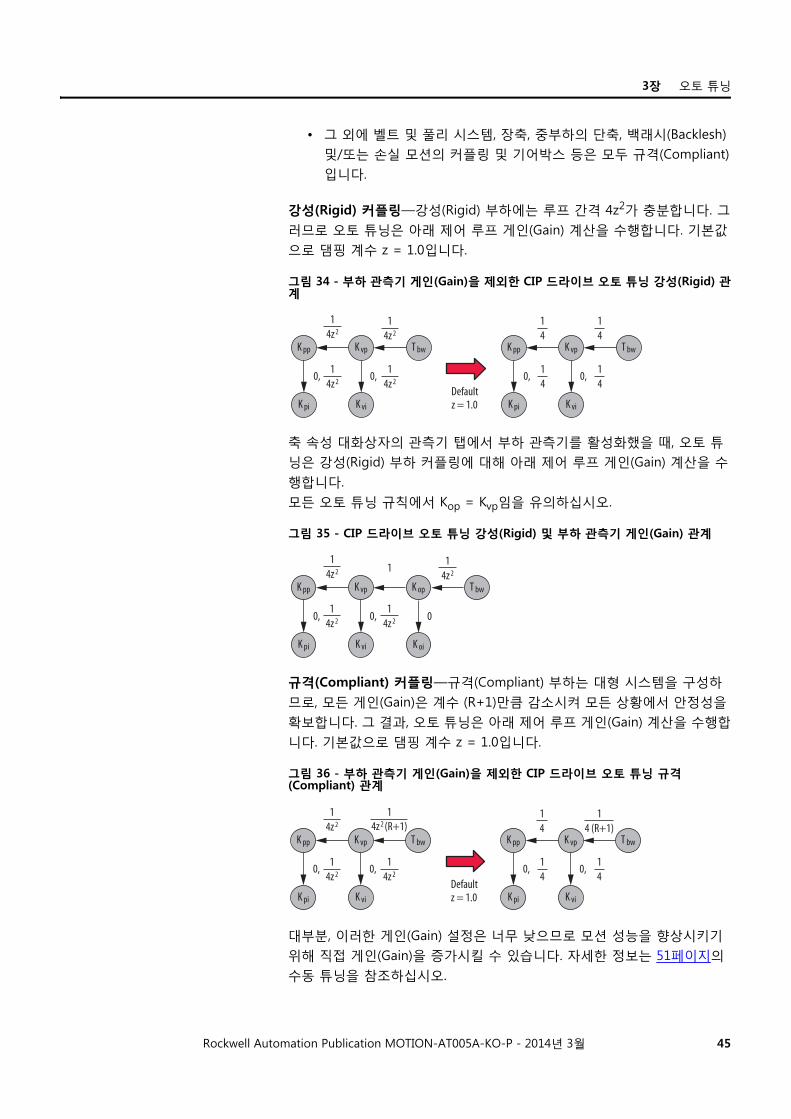
규격(Compliant) 커플링—규격(Compliant) 부하는 대형 시스템을 구성하
므로, 모든 게인(Gain)은 계수 (R+1)만큼 감소시켜 모든 상황에서 안정성을
확보합니다. 그 결과, 오토 튜닝은 아래 제어 루프 게인(Gain) 계산을 수행합
니다. 기본값으로 댐핑 계수 z = 1.0입니다.
그림 36 - 부하 관측기 게인(Gain)을 제외한 CIP 드라이브 오토 튜닝 규격(Compliant) 관계
대부분, 이러한 게인(Gain) 설정은 너무 낮으므로 모션 성능을 향상시키기
위해 직접 게인(Gain)을 증가시킬 수 있습니다. 자세한 정보는 51페이지의
수동 튜닝을 참조하십시오.
1
4z 2
1
4z 2
1
4z 2
1
4z 20, 0,
1
4
1
4
1
4
1
40, 0,
Default z = 1.0
K pp
K pi K vi
K vp T bw K pp
K pi K vi
K vp T bw
1
4z 2
1
4z 2
1
4z 2
1
4z 20, 0, 0
1
K pp
K pi K vi
K vp
K oi
K op T bw
1
4z 2
1
4z 2
1
4z 20, 0,
1
4 (R+1)
1
4
1
4
1
40, 0,
Default z = 1.0
1
4z (R+1)2
K pp
K pi K vi
K vp T bw K pp
K pi K vi
K vp T bw
46 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
3장 오토 튜닝
축 속성 대화상자의 관측기 탭에서 부하 관측기를 활성화했을 때, 오토 튜
닝은 아래 제어 루프 게인(Gain) 계산을 수행합니다. 모든 오토 튜닝 규칙에
서 Kop = Kvp임을 유의하십시오.
그림 37 - CIP 드라이브 오토 튜닝 규격(Compliant) 및 부하 관측기 게인(Gain) 관계
튜닝 수행
애플리케이션 유형, 루프 응답, 부하 커플링 풀다운 메뉴에서 설정값을 선택
하고 나면, 컨트롤러로 온라인에 접속해 오토 튜닝을 수행할 준비를 완료합
니다.
1. 축 속성 대화상자의 오토 튜닝 탭에서 시작 버튼을 클릭하십시오.
2. 튜닝이 완료될 때까지 기다리십시오.
3. 튜닝 값 수락(Accept Tuned Values)을 클릭하십시오.
4. 드라이브 시험을 실시하여 기계 성능 및 안정성을 관찰하십시오.
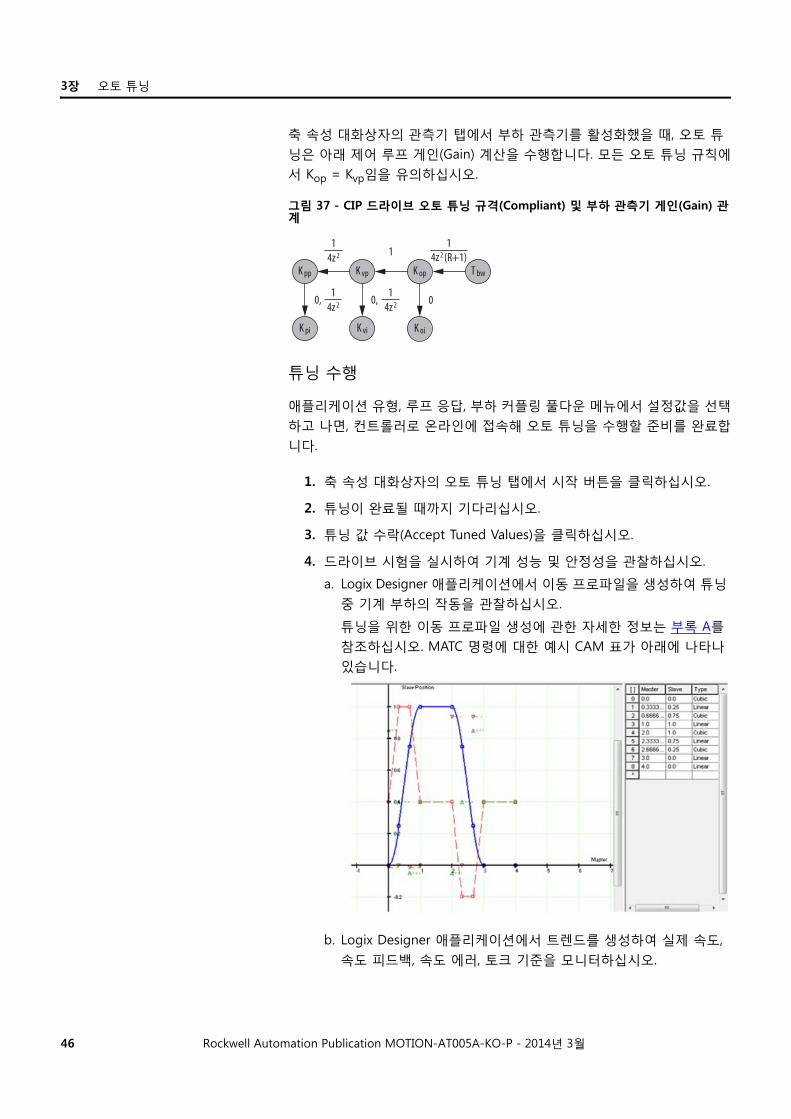
a. Logix Designer 애플리케이션에서 이동 프로파일을 생성하여 튜닝
중 기계 부하의 작동을 관찰하십시오.
튜닝을 위한 이동 프로파일 생성에 관한 자세한 정보는 부록 A를
참조하십시오. MATC 명령에 대한 예시 CAM 표가 아래에 나타나
있습니다.
b. Logix Designer 애플리케이션에서 트렌드를 생성하여 실제 속도,
속도 피드백, 속도 에러, 토크 기준을 모니터하십시오.
1
4z 2
1
4z 2
1
4z 20, 0, 0
11
4z (R+1)2
K pp
K pi K vi
K vp
K oi
K op T bw
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 47
3장 오토 튜닝
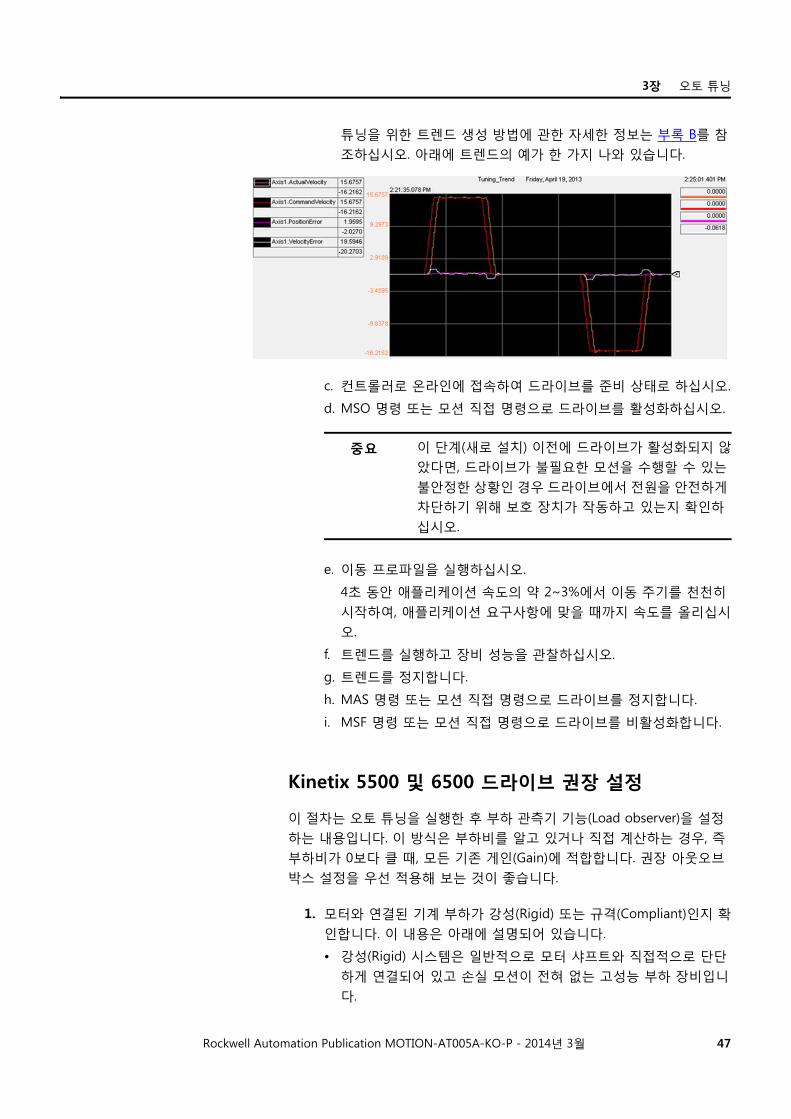
튜닝을 위한 트렌드 생성 방법에 관한 자세한 정보는 부록 B를 참
조하십시오. 아래에 트렌드의 예가 한 가지 나와 있습니다.
c. 컨트롤러로 온라인에 접속하여 드라이브를 준비 상태로 하십시오.
d. MSO 명령 또는 모션 직접 명령으로 드라이브를 활성화하십시오.
e. 이동 프로파일을 실행하십시오.
4초 동안 애플리케이션 속도의 약 2~3%에서 이동 주기를 천천히
시작하여, 애플리케이션 요구사항에 맞을 때까지 속도를 올리십시
오.
f. 트렌드를 실행하고 장비 성능을 관찰하십시오.
g. 트렌드를 정지합니다.
h. MAS 명령 또는 모션 직접 명령으로 드라이브를 정지합니다.
i. MSF 명령 또는 모션 직접 명령으로 드라이브를 비활성화합니다.
Kinetix 5500 및 6500 드라이브 권장 설정
이 절차는 오토 튜닝을 실행한 후 부하 관측기 기능(Load observer)을 설정
하는 내용입니다. 이 방식은 부하비를 알고 있거나 직접 계산하는 경우, 즉
부하비가 0보다 클 때, 모든 기존 게인(Gain)에 적합합니다. 권장 아웃오브
박스 설정을 우선 적용해 보는 것이 좋습니다.
1. 모터와 연결된 기계 부하가 강성(Rigid) 또는 규격(Compliant)인지 확
인합니다. 이 내용은 아래에 설명되어 있습니다.
• 강성(Rigid) 시스템은 일반적으로 모터 샤프트와 직접적으로 단단
하게 연결되어 있고 손실 모션이 전혀 없는 고성능 부하 장비입니
다.
중요 이 단계(새로 설치) 이전에 드라이브가 활성화되지 않
았다면, 드라이브가 불필요한 모션을 수행할 수 있는
불안정한 상황인 경우 드라이브에서 전원을 안전하게
차단하기 위해 보호 장치가 작동하고 있는지 확인하
십시오.
48 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
3장 오토 튜닝
• 그 외에 벨트 및 풀리 시스템, 장축, 중부하의 단축, 백래시
(Backlesh) 및/또는 손실 모션의 커플링 및 기어박스 등은 모두 규
격(Compliant)입니다.
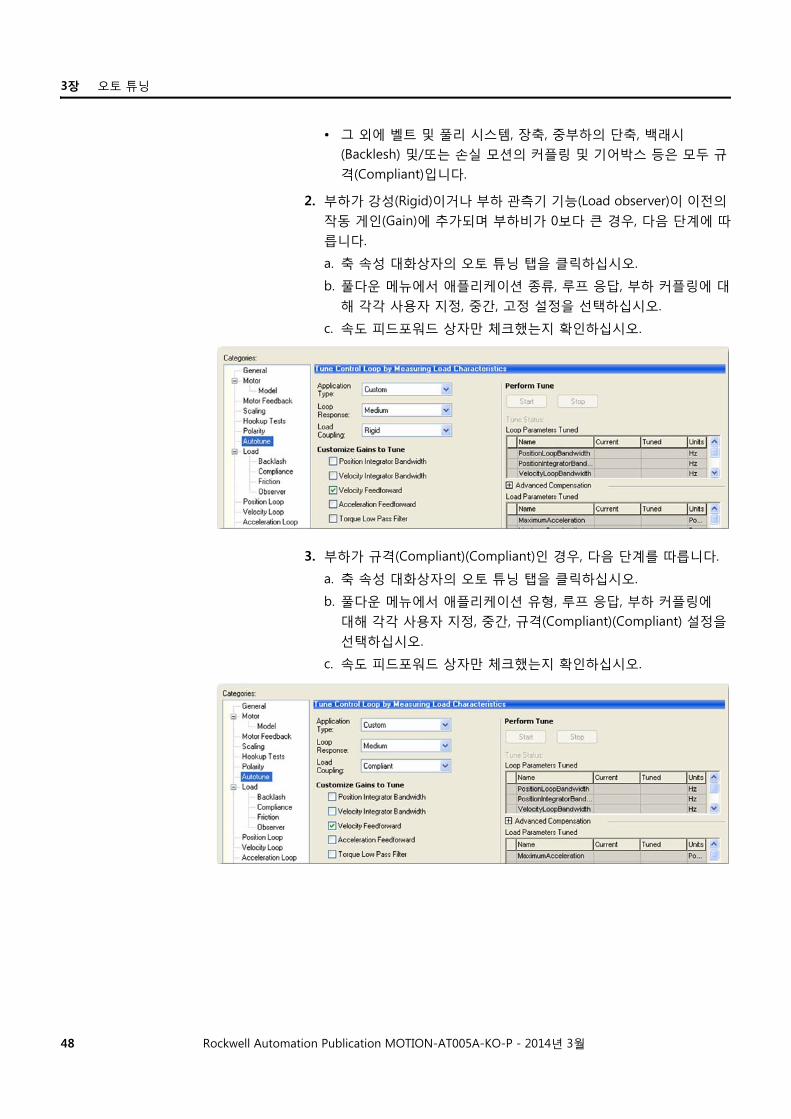
2. 부하가 강성(Rigid)이거나 부하 관측기 기능(Load observer)이 이전의
작동 게인(Gain)에 추가되며 부하비가 0보다 큰 경우, 다음 단계에 따
릅니다.
a. 축 속성 대화상자의 오토 튜닝 탭을 클릭하십시오.
b. 풀다운 메뉴에서 애플리케이션 종류, 루프 응답, 부하 커플링에 대
해 각각 사용자 지정, 중간, 고정 설정을 선택하십시오.
c. 속도 피드포워드 상자만 체크했는지 확인하십시오.
3. 부하가 규격(Compliant)(Compliant)인 경우, 다음 단계를 따릅니다.
a. 축 속성 대화상자의 오토 튜닝 탭을 클릭하십시오.
b. 풀다운 메뉴에서 애플리케이션 유형, 루프 응답, 부하 커플링에
대해 각각 사용자 지정, 중간, 규격(Compliant)(Compliant) 설정을
선택하십시오.
c. 속도 피드포워드 상자만 체크했는지 확인하십시오.
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 49
3장 오토 튜닝
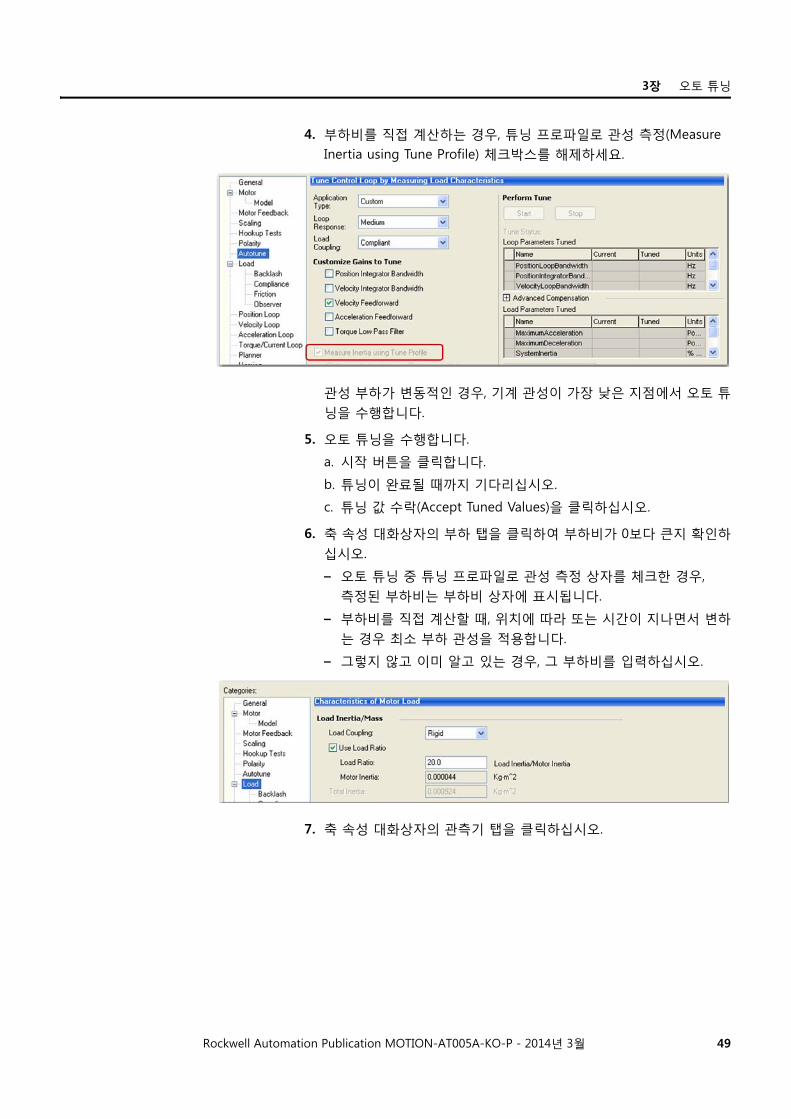
4. 부하비를 직접 계산하는 경우, 튜닝 프로파일로 관성 측정(Measure
Inertia using Tune Profile) 체크박스를 해제하세요.
관성 부하가 변동적인 경우, 기계 관성이 가장 낮은 지점에서 오토 튜
닝을 수행합니다.
5. 오토 튜닝을 수행합니다.
a. 시작 버튼을 클릭합니다.
b. 튜닝이 완료될 때까지 기다리십시오.
c. 튜닝 값 수락(Accept Tuned Values)을 클릭하십시오.
6. 축 속성 대화상자의 부하 탭을 클릭하여 부하비가 0보다 큰지 확인하
십시오.
– 오토 튜닝 중 튜닝 프로파일로 관성 측정 상자를 체크한 경우,
측정된 부하비는 부하비 상자에 표시됩니다.
– 부하비를 직접 계산할 때, 위치에 따라 또는 시간이 지나면서 변하
는 경우 최소 부하 관성을 적용합니다.
– 그렇지 않고 이미 알고 있는 경우, 그 부하비를 입력하십시오.
7. 축 속성 대화상자의 관측기 탭을 클릭하십시오.
50 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
3장 오토 튜닝
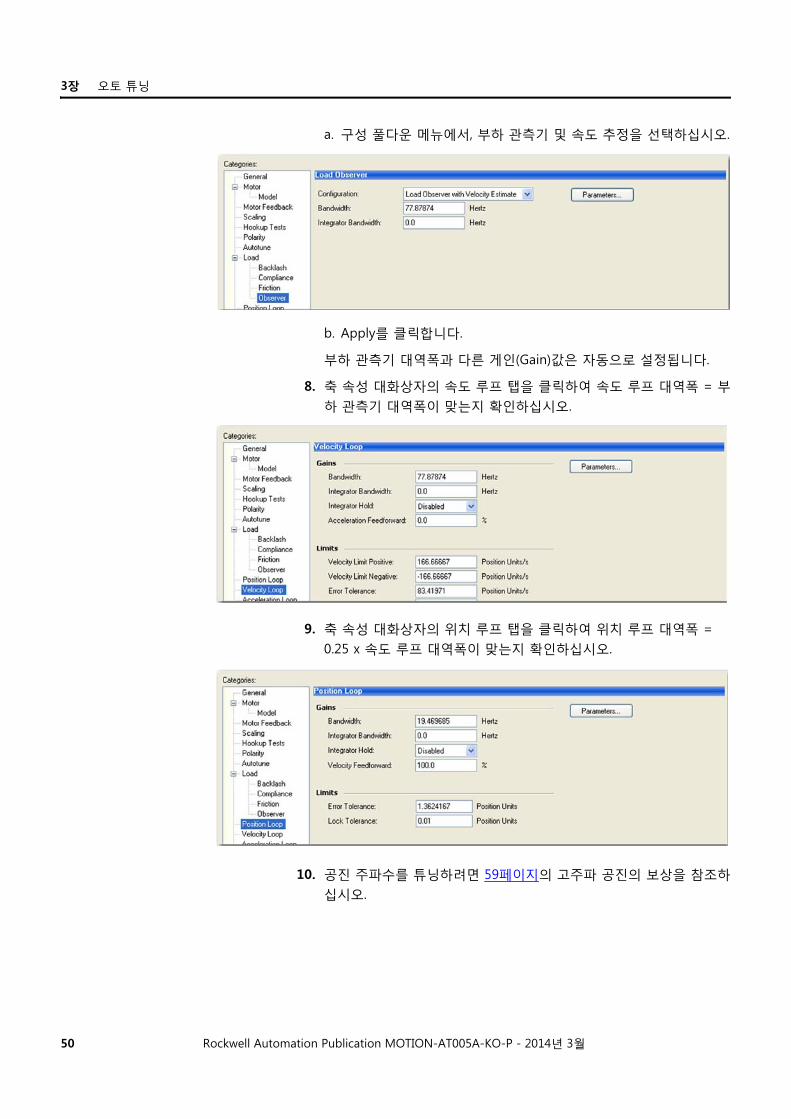
a. 구성 풀다운 메뉴에서, 부하 관측기 및 속도 추정을 선택하십시오.
b. Apply를 클릭합니다.
부하 관측기 대역폭과 다른 게인(Gain)값은 자동으로 설정됩니다.
8. 축 속성 대화상자의 속도 루프 탭을 클릭하여 속도 루프 대역폭 = 부
하 관측기 대역폭이 맞는지 확인하십시오.
9. 축 속성 대화상자의 위치 루프 탭을 클릭하여 위치 루프 대역폭 =
0.25 x 속도 루프 대역폭이 맞는지 확인하십시오.
10. 공진 주파수를 튜닝하려면 59페이지의 고주파 공진의 보상을 참조하
십시오.
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 51
3장 오토 튜닝
추가 튜닝이 필요한가? 서보 드라이브가 추가 튜닝 없이 만족할 만한 성능을 제공할 수 있는지 알
수 있는 몇 가지 확인 사항이 있습니다.
• 원활한 주기 프로파일로 원활한 모션
• 명령 모션 도중이나 이후에 가청 잡음이 거의 또는 전혀 없음
• 위치 및/또는 속도 에러가 애플리케이션의 요구사항 내에서 발생
• 위치 및/또는 속도 에러가 반복 가능함
부하가 의도한 바에 따라 응답하지 않는 경우, 튜닝 전에 이러한 요소들을
고려하십시오.
• 알맞은 서보 크기를 알아 보십시오. 가장 좋은 방법은 모션 분석기
(Motion Analyzer) 소프트웨어에서 축을 모델링하여 특정한 부하 및
이동 프로파일에 대해 모터 및 드라이브의 적절한 크기를 확인하는
것입니다. 또한, 기어비, 부하 크기, 커플링 구성, 고해상도
(Resolution) 대 저해상도(Resolution) 피드백 장치 등 다양한 디자인
옵션을 비교할 수도 있습니다.
• 모션 분석기 소프트웨어로 축을 시뮬레이션하여, 다양한 제어 루프 게
인(Gain) 설정을 시험하고 원하는 모션을 제공할 수 있는지 확인하십
시오. 모터와 부하 사이에 더욱 직접적이고 강한 커플링을 생성함으
로써 컴플라이언스 및 장비 진동을 최소화할 수 있습니다. 이를 위해
품질이 좋은 커플링, 변속기, 액추에이터, 지침을 사용하면 도움이 됩
니다.
모션 성능을 더욱 최적화하기 위해 부하를 추가 튜닝해야 하는 경우, 51페
이지의 수동 튜닝을 참조하십시오.

52 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
3장 오토 튜닝
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 51
4 장
수동 튜닝
이 장은 서보 드라이브 수동 튜닝에 일반적으로 수용되는 방식을 설명합니
다. 이 방식은 내부 속도 루프를 튜닝한 다음 외부 위치 루프를 튜닝하기 때
문에 ‘인사이드 아웃’ 튜닝이라고도 합니다 이 방식은 안정성 한계 지점까
지 제어 루프 게인(Gain)을 증가시킨 다음 정해진 퍼센트만틈 내리는 방식
입니다. 다양한 게인(Gain)에 대한 일반적 범위도 지침으로 정해져 있습니
다.
아웃오브박스 및 오토 튜닝 강성(Rigid) 방식은 상대적으로 높은 성능을 얻
습니다. 단, 튜닝이 익숙한 경우이거나 최고 성능이 필요할 경우에, 이 방식
을 통해 오토 튜닝 규격(Compliant) 설정에서 성능을 더욱 최적화할 수 있
습니다. 이전에 설명한 방식으로 원하는 수준의 성능을 얻을 수 없는 다음
상황에서 이 방식을 사용할 수 있습니다.
• 아웃오브박스 또는 오토 튜닝 설정으로 시작하여 성능을 최적화하고
자 할 때
• 까다로운 축을 초기 상태에서 튜닝할 때
기타 요구사항으로 아래 사항이 있습니다.
• 안정된 작동을 제공하는 일련의 게인(Gain)으로 시작합니다
• 튜닝 중 모터에 부하를 인가해 줍니다
• 드라이브에서 중첩된 속도-위치 루프 구조를 사용합니다.
예: Sercos 및 CIP 드라이브
축 초기화 (선택) 앞장에서 설명한 오토 튜닝이나 아웃오브박스 설정으로 축을 설정했지만
더 높은 성능을 원하는 경우, 이 장을 생략하고 54페이지의 속도 루프 튜닝
로 바로 가십시오.
기계 부하가 불안정하거나 제어 루프 게인(Gain)값이 적절하지 않은 경우,
이 섹션부터 시작하십시오. 단, 23페이지의 아웃오브박스 튜닝 및 31페이지
의 오토 튜닝에 설명된 권장 방식으로 안정적인 결과를 얻을 수 있으므로,
우선 적용해 보는 것이 좋습니다.
축을 초기 상태의 기본 설정으로 돌리려면 이 단계를 따르십시오.
1. Logix Designer 애플리케이션에서 컨트롤러를 오프라인 상태로 만듭
니다.

52 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
4장 수동 튜닝
2. 축 속성 대화상자를 열어 주십시오.
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 53
4장 수동 튜닝
3. 아래 방법 중 하나를 사용해 축 설정을 초기값으로 리셋합니다.
• 모터 종류를 ‘없음(none)’으로 설정한 다음 모터의 카탈로그 번호
를 다시 선택합니다.
• 축과 드라이브를 삭제했다가 다시 생성합니다.
4. 아래 축 파라미터를 설정합니다.
a. 루프 유형 = 위치 서보로 설정
b. 댐핑 계수 z = 1.0 (루프 응답 = CIP 드라이브에서 중간)으로 설정
c. Kpp 및 Kpi = 0 설정
d. Kvp 및 Kvi = 0 설정
e. 위치 및 속도 적분기 보류 = 비활성으로 설정
f. 부하 관측기 구성 = 비활성으로 설정
g. Kop 및 Koi = 0 설정
h. Kvff 및 Kaff = 0 설정
i. 로우패스 필터(Low-pass Filter) 대역폭 = 0으로 설정
j. 노치 필터(Notch Filter) 주파수 = 0으로 설정
k. 리드/래그 필터(Lead-Lag Filter) 게인(Gain) = 1로 설정
l. 리드/래그 필터(Lead-Lag Filter) 대역폭 = 0으로 설정
5. 축의 동적 한계를 설정합니다.
a. 토크 한계를 애플리케이션 요구사항에 맞게 설정합니다.
b. 장애를 방지하기 위해 위치 에러 공차를 큰 값으로 변경합니다.
c. CIP 드라이브의 경우, 장애를 방지하기 위해 속도 에러 공차를 큰
값으로 변경합니다.
6. 부하 관성비를 설정합니다.
a. 이전 오토 튜닝에서 R이 0보다 큰 것으로 확인된 경우, Logix
Designer 애플리케이션에 입력합니다.
b. 기계 관성이 최저인 지점에서 R을 계산한 경우, 그 값을 Logix
Designer 애플리케이션에 입력합니다.
c. 그렇지 않으면, Logix Designer 애플리케이션에 R=0으로 설정합
니다.
7. Kvp에 대한 초기값을 설정합니다.
54 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
4장 수동 튜닝
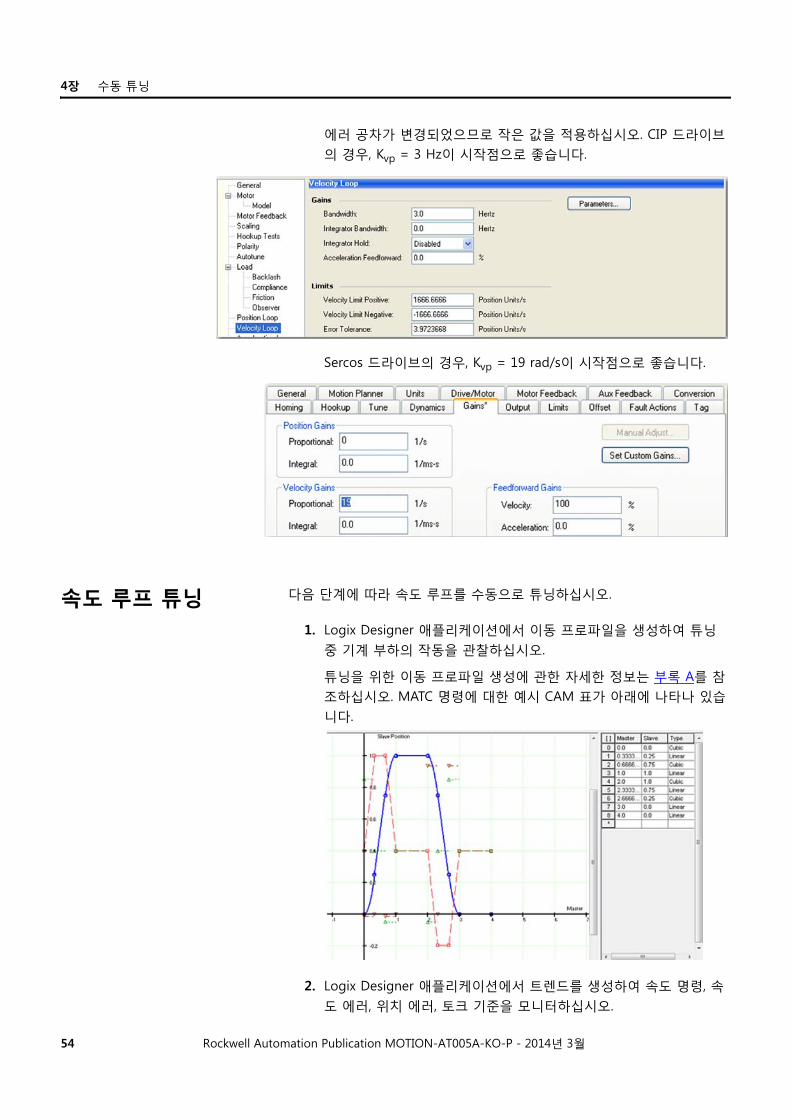
에러 공차가 변경되었으므로 작은 값을 적용하십시오. CIP 드라이브
의 경우, Kvp = 3 Hz이 시작점으로 좋습니다.
Sercos 드라이브의 경우, Kvp = 19 rad/s이 시작점으로 좋습니다.
속도 루프 튜닝 다음 단계에 따라 속도 루프를 수동으로 튜닝하십시오.
1. Logix Designer 애플리케이션에서 이동 프로파일을 생성하여 튜닝
중 기계 부하의 작동을 관찰하십시오.
튜닝을 위한 이동 프로파일 생성에 관한 자세한 정보는 부록 A를 참
조하십시오. MATC 명령에 대한 예시 CAM 표가 아래에 나타나 있습
니다.
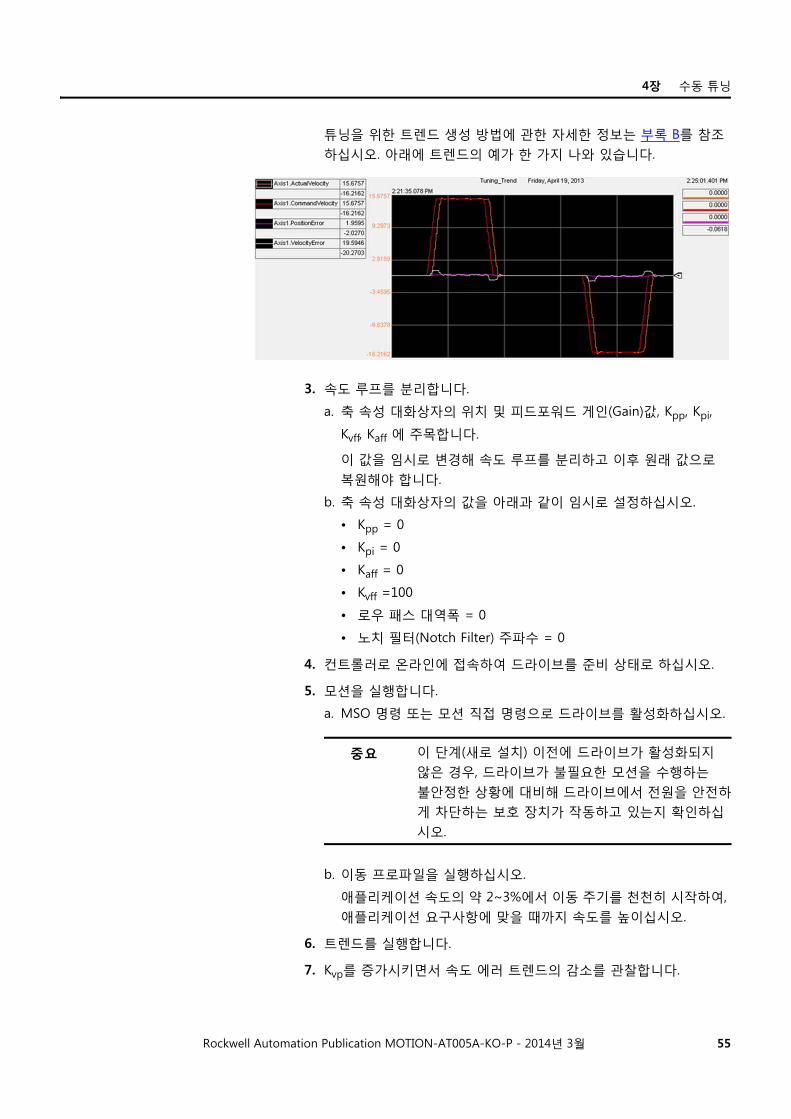
2. Logix Designer 애플리케이션에서 트렌드를 생성하여 속도 명령, 속
도 에러, 위치 에러, 토크 기준을 모니터하십시오.
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 55
4장 수동 튜닝
튜닝을 위한 트렌드 생성 방법에 관한 자세한 정보는 부록 B를 참조
하십시오. 아래에 트렌드의 예가 한 가지 나와 있습니다.
3. 속도 루프를 분리합니다.
a. 축 속성 대화상자의 위치 및 피드포워드 게인(Gain)값, Kpp, Kpi,
Kvff, Kaff 에 주목합니다.
이 값을 임시로 변경해 속도 루프를 분리하고 이후 원래 값으로
복원해야 합니다.
b. 축 속성 대화상자의 값을 아래과 같이 임시로 설정하십시오.
• Kpp = 0
• Kpi = 0
• Kaff = 0
• Kvff =100
• 로우 패스 대역폭 = 0
• 노치 필터(Notch Filter) 주파수 = 0
4. 컨트롤러로 온라인에 접속하여 드라이브를 준비 상태로 하십시오.
5. 모션을 실행합니다.
a. MSO 명령 또는 모션 직접 명령으로 드라이브를 활성화하십시오.
b. 이동 프로파일을 실행하십시오.
애플리케이션 속도의 약 2~3%에서 이동 주기를 천천히 시작하여,
애플리케이션 요구사항에 맞을 때까지 속도를 높이십시오.
6. 트렌드를 실행합니다.
7. Kvp를 증가시키면서 속도 에러 트렌드의 감소를 관찰합니다.
중요 이 단계(새로 설치) 이전에 드라이브가 활성화되지
않은 경우, 드라이브가 불필요한 모션을 수행하는
불안정한 상황에 대비해 드라이브에서 전원을 안전하
게 차단하는 보호 장치가 작동하고 있는지 확인하십
시오.
56 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
4장 수동 튜닝
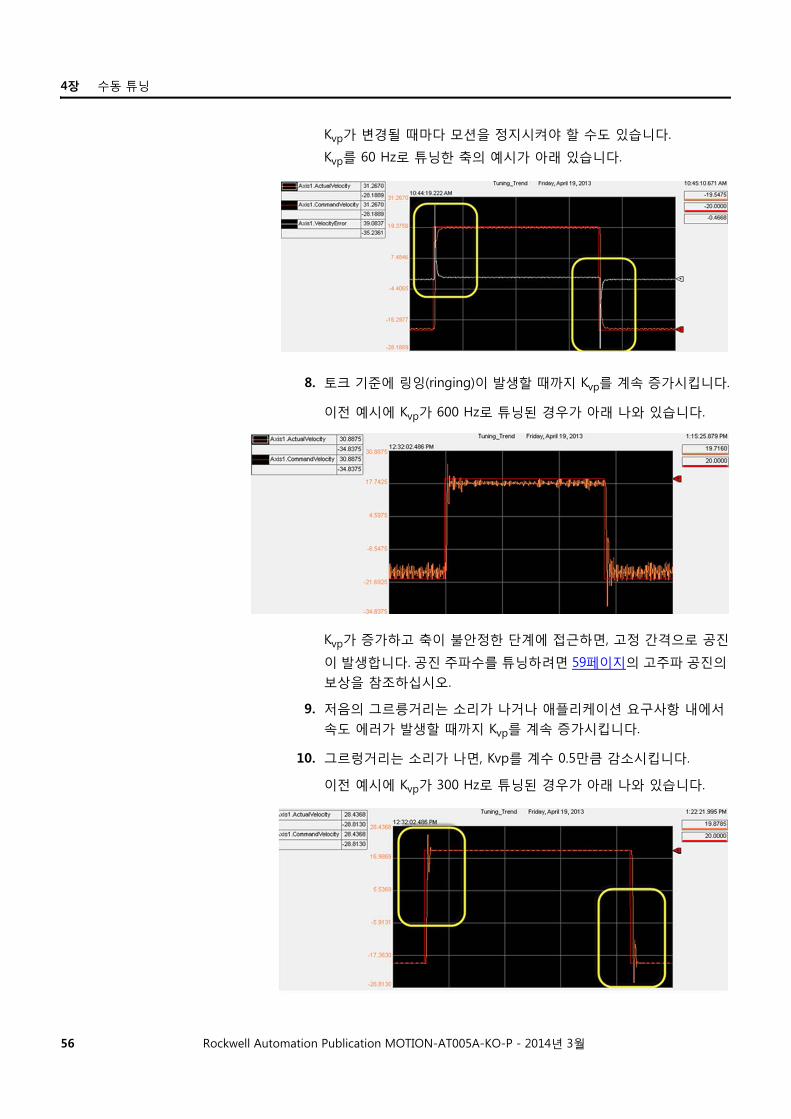
Kvp가 변경될 때마다 모션을 정지시켜야 할 수도 있습니다.
Kvp를 60 Hz로 튜닝한 축의 예시가 아래 있습니다.
8. 토크 기준에 링잉(ringing)이 발생할 때까지 Kvp를 계속 증가시킵니다.
이전 예시에 Kvp가 600 Hz로 튜닝된 경우가 아래 나와 있습니다.
Kvp가 증가하고 축이 불안정한 단계에 접근하면, 고정 간격으로 공진
이 발생합니다. 공진 주파수를 튜닝하려면 59페이지의 고주파 공진의
보상을 참조하십시오.
9. 저음의 그르릉거리는 소리가 나거나 애플리케이션 요구사항 내에서
속도 에러가 발생할 때까지 Kvp를 계속 증가시킵니다.
10. 그르렁거리는 소리가 나면, Kvp를 계수 0.5만큼 감소시킵니다.
이전 예시에 Kvp가 300 Hz로 튜닝된 경우가 아래 나와 있습니다.
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 57
4장 수동 튜닝
이 예에서는, 고주파 공진이 발생하지 않았습니다.
11. 이동 프로파일의 역학을 증가시킵니다. 예를 들어, MATC 또는 다른
이동 명령어로 시간 스케일링 및 거리 스케일링을 증가시켜 애플리케
이션의 동적 및 이동 한계에 접근하는 적극적 이동 프로파일을 생성
합니다.
12. 8~10단계를 반복하십시오.
13. 해당 애플리케이션에 대해 다른 게인(Gain)을 설정해야 하는지 확인
하려면 33페이지의 표 8을 참조하십시오.
17페이지의 부하 관측기 기능(Load observer)도 참조하십시오.
• CIP 드라이브의 경우, 다양한 적분 게인(Gain)에 대한 일반적인 값
이
정해져 있습니다.
0 Koi Kop / 4
0 Kvi Kvp / 4
• Sercos 드라이브의 경우, 다양한 적분 게인(Gain)에 대한 일반적인
값이 정해져 있습니다.
0 Koi Kop / 4
0 Kvi Kvp2 / 4000
14. 트렌드를 정지합니다.
15. MAS 명령 또는 모션 직접 명령으로 드라이브를 정지합니다.
16. MSF 명령 또는 모션 직접 명령으로 드라이브를 비활성화합니다.
17. 위치 루프를 다시 활성화하려면 3a 단계에 나오는 원래의 값으로
위치 및 피드포워드 게인(Gain)을 복구하십시오.
58 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
4장 수동 튜닝
위치 루프 튜닝 이전 섹션의 속도 루프 튜닝이 완료되면, 다음 단계에 따라서 위치 루프를
수동으로 튜닝하십시오.
1. 컨트롤러로 온라인에 접속하여 드라이브를 준비 상태로 하십시오.
2. 모션을 실행합니다.
a. MSO 명령 또는 모션 직접 명령으로 드라이브를 활성화하십시오.
b. 이동 프로파일을 실행하십시오.
4초 동안 애플리케이션 속도의 약 2~3%에서 이동 주기를 천천히
시작하여, 애플리케이션 요구사항에 맞을 때까지 속도를 올리십시
오.
3. 트렌드를 실행합니다.
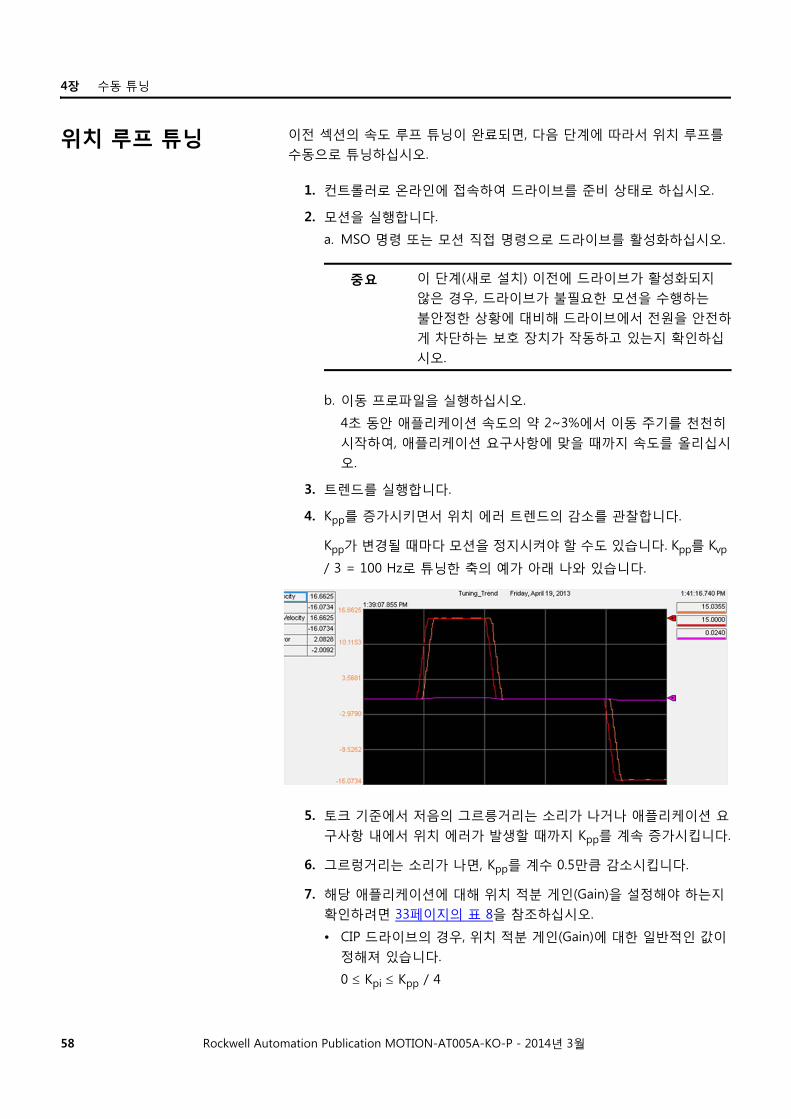
4. Kpp를 증가시키면서 위치 에러 트렌드의 감소를 관찰합니다.
Kpp가 변경될 때마다 모션을 정지시켜야 할 수도 있습니다. Kpp를 Kvp
/ 3 = 100 Hz로 튜닝한 축의 예가 아래 나와 있습니다.
5. 토크 기준에서 저음의 그르릉거리는 소리가 나거나 애플리케이션 요
구사항 내에서 위치 에러가 발생할 때까지 Kpp를 계속 증가시킵니다.
6. 그르렁거리는 소리가 나면, Kpp를 계수 0.5만큼 감소시킵니다.
7. 해당 애플리케이션에 대해 위치 적분 게인(Gain)을 설정해야 하는지
확인하려면 33페이지의 표 8을 참조하십시오.
• CIP 드라이브의 경우, 위치 적분 게인(Gain)에 대한 일반적인 값이
정해져 있습니다.
0 Kpi Kpp / 4
중요 이 단계(새로 설치) 이전에 드라이브가 활성화되지
않은 경우, 드라이브가 불필요한 모션을 수행하는
불안정한 상황에 대비해 드라이브에서 전원을 안전하
게 차단하는 보호 장치가 작동하고 있는지 확인하십
시오.
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 59
4장 수동 튜닝
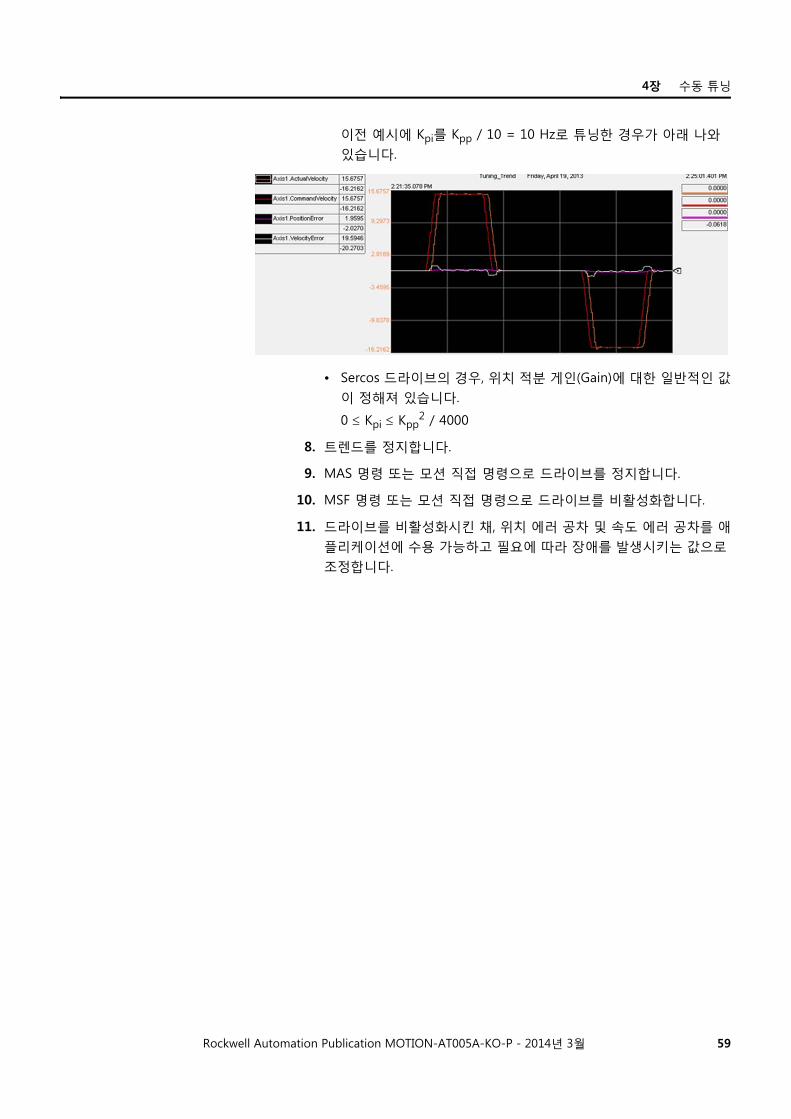
이전 예시에 Kpi를 Kpp / 10 = 10 Hz로 튜닝한 경우가 아래 나와
있습니다.
• Sercos 드라이브의 경우, 위치 적분 게인(Gain)에 대한 일반적인 값
이 정해져 있습니다.
0 Kpi Kpp2 / 4000
8. 트렌드를 정지합니다.
9. MAS 명령 또는 모션 직접 명령으로 드라이브를 정지합니다.
10. MSF 명령 또는 모션 직접 명령으로 드라이브를 비활성화합니다.
11. 드라이브를 비활성화시킨 채, 위치 에러 공차 및 속도 에러 공차를 애
플리케이션에 수용 가능하고 필요에 따라 장애를 발생시키는 값으로
조정합니다.

60 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
4장 수동 튜닝
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 59
5 장
필터 및 보상
고주파 공진의 보상 모든 모션 애플리케이션의 약 15%에는 부하 장비의 가청 고주파 잡음으로
여겨지는 고주파 공진이 발생합니다. 또한, 모든 애플리케이션은 성능을 최
적화하면서 게인(Gain)을 한계까지 끌어 올리면 결국 공진을 보입니다.
아래 단계에 따라 고주파 공진을 파악한 후 감소시킵니다.
1. 모션 직접 명령을 사용해 아래 이동 순서를 수행합니다.
a. MSO 명령으로 드라이브를 활성화하십시오.
b. MAJ 또는 MAM 명령으로 축을 천천히 시작하십시오.
c. MAS 명령으로 축을 정지시키십시오.
d. MSF 명령으로 드라이브를 비활성화하십시오.
2. 해당 모션 애플리케이션에 가청 고주파 공진이 발생하는지 확인하십
시오.
• 이동 순서 중 가청 고주파 공진이 발생하지 않는 경우, 남은 단계
를 무시하고 튜닝을 완료합니다.
• 이동 순서 중에 가청 고주파 공진이 발생하는 경우, FFT 스마트폰
또는 태블릿 애플리케이션을 이용해 주된 공진 주파수를 찾으십시
오. 이 주파수는 아래 iAnalyzer Lite 예에서 최고점으로 나타납니
다.
3. 공진이 Hz 단위의 토크 루프 대역폭 아래 있고 저음의 그르렁거리는
소리가 나는 경우, 불안정한 상태이므로 아래 단계를 진행하기 전에
제어 루프 게인(Gain)을 감소시켜야 합니다.
중요 축을 시작하기 전에 가청 공진이 들려, MAJ 및 MAS
명령이 불필요해지는 경우도 있습니다.
60 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
5장 필터 및 보상
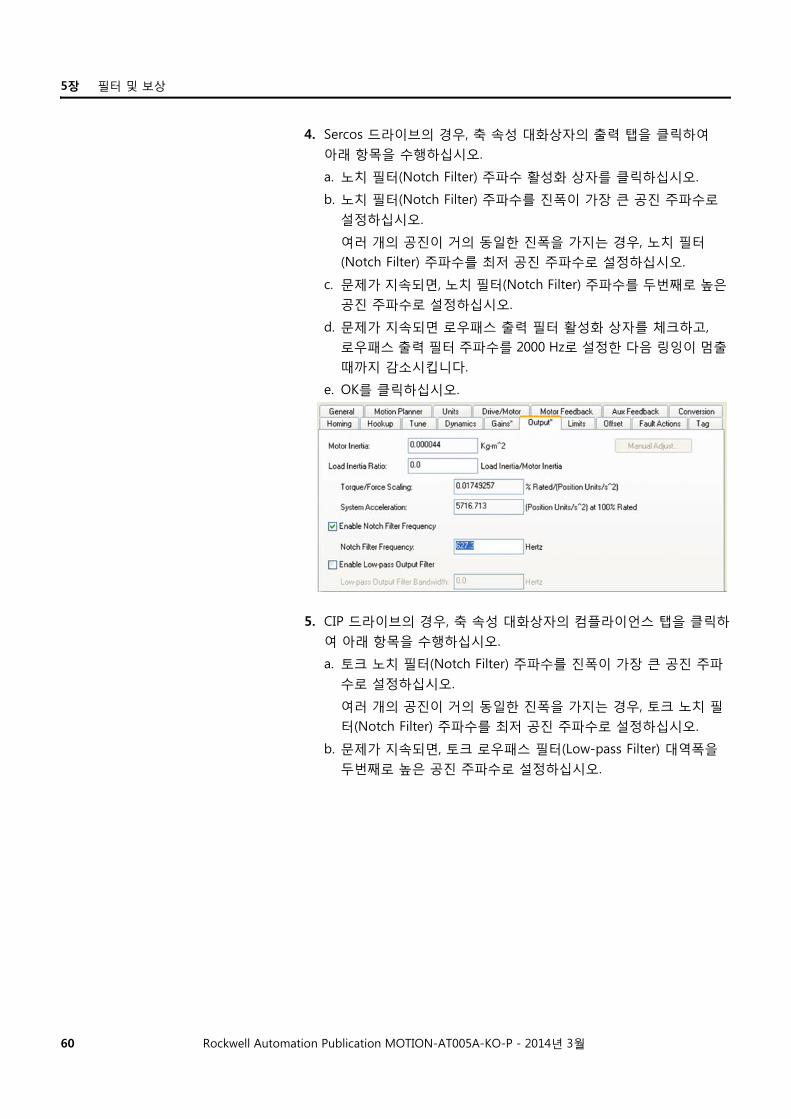
4. Sercos 드라이브의 경우, 축 속성 대화상자의 출력 탭을 클릭하여
아래 항목을 수행하십시오.
a. 노치 필터(Notch Filter) 주파수 활성화 상자를 클릭하십시오.
b. 노치 필터(Notch Filter) 주파수를 진폭이 가장 큰 공진 주파수로
설정하십시오.
여러 개의 공진이 거의 동일한 진폭을 가지는 경우, 노치 필터
(Notch Filter) 주파수를 최저 공진 주파수로 설정하십시오.
c. 문제가 지속되면, 노치 필터(Notch Filter) 주파수를 두번째로 높은
공진 주파수로 설정하십시오.
d. 문제가 지속되면 로우패스 출력 필터 활성화 상자를 체크하고,
로우패스 출력 필터 주파수를 2000 Hz로 설정한 다음 링잉이 멈출
때까지 감소시킵니다.
e. OK를 클릭하십시오.
5. CIP 드라이브의 경우, 축 속성 대화상자의 컴플라이언스 탭을 클릭하
여 아래 항목을 수행하십시오.
a. 토크 노치 필터(Notch Filter) 주파수를 진폭이 가장 큰 공진 주파
수로 설정하십시오.
여러 개의 공진이 거의 동일한 진폭을 가지는 경우, 토크 노치 필
터(Notch Filter) 주파수를 최저 공진 주파수로 설정하십시오.
b. 문제가 지속되면, 토크 로우패스 필터(Low-pass Filter) 대역폭을
두번째로 높은 공진 주파수로 설정하십시오.
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 61
5장 필터 및 보상
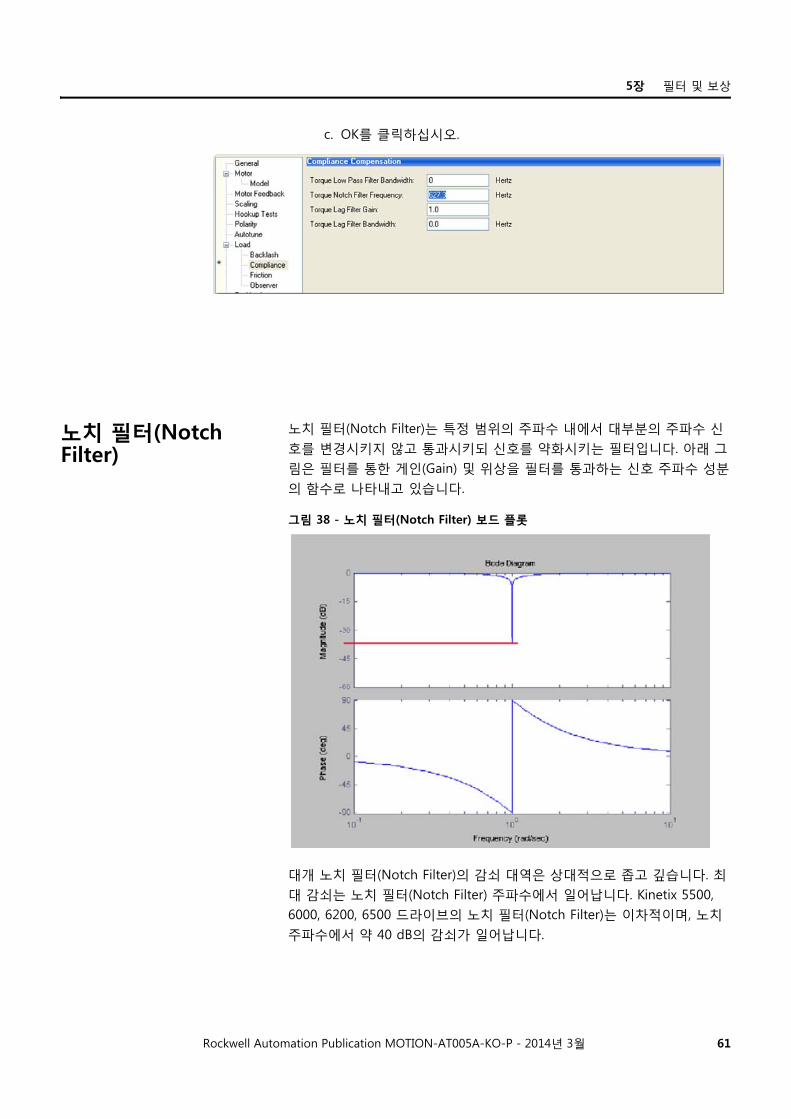
c. OK를 클릭하십시오.
노치 필터(Notch Filter)
노치 필터(Notch Filter)는 특정 범위의 주파수 내에서 대부분의 주파수 신
호를 변경시키지 않고 통과시키되 신호를 약화시키는 필터입니다. 아래 그
림은 필터를 통한 게인(Gain) 및 위상을 필터를 통과하는 신호 주파수 성분
의 함수로 나타내고 있습니다.
그림 38 - 노치 필터(Notch Filter) 보드 플롯
대개 노치 필터(Notch Filter)의 감쇠 대역은 상대적으로 좁고 깊습니다. 최
대 감쇠는 노치 필터(Notch Filter) 주파수에서 일어납니다. Kinetix 5500,
6000, 6200, 6500 드라이브의 노치 필터(Notch Filter)는 이차적이며, 노치
주파수에서 약 40 dB의 감쇠가 일어납니다.
62 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
5장 필터 및 보상
어떤 필터와 함께 쓰더라도, 출력은 입력시와는 달라집니다. 이러한 편이는
모든 주파수에 존재합니다. 출력은 노치 주파수까지 입력을 지연시키고, 노
치 주파수를 넘는 주파수에 대한 입력을 유도합니다.
노치 필터(Notch Filter)는 공진 주파수가 제어 루프 대역폭보다 높을 때 공
진 제어에 효과적입니다. 로우패스 필터(Low-pass Filter)와 마찬가지로, 노
치 필터(Notch Filter)는 고주파 공진을 촉발할 수 있는 장비 출력 에너지를
현저하게 감소시킴으로써 효과를 얻습니다. 공진 주파수가 상대적으로 제
어 루프 대역폭에 가까운 경우에도 사용할 수 있습니다. 노치 필터(Notch
Filter)로 인한 위상 지연이 노치 주파수 주위에 집중되어 있기 때문입니다.
노치 피터의 효과를 높이려면 노치 필터(Notch Filter) 주파수를 자연적 부
하 공진 주파수에 아주 가깝게 설정해야 합니다.
노치 필터(Notch Filter) 설정에 대한 자세한 정보는 59페이지의 고주파 공
진의 보상를 참조하십시오.
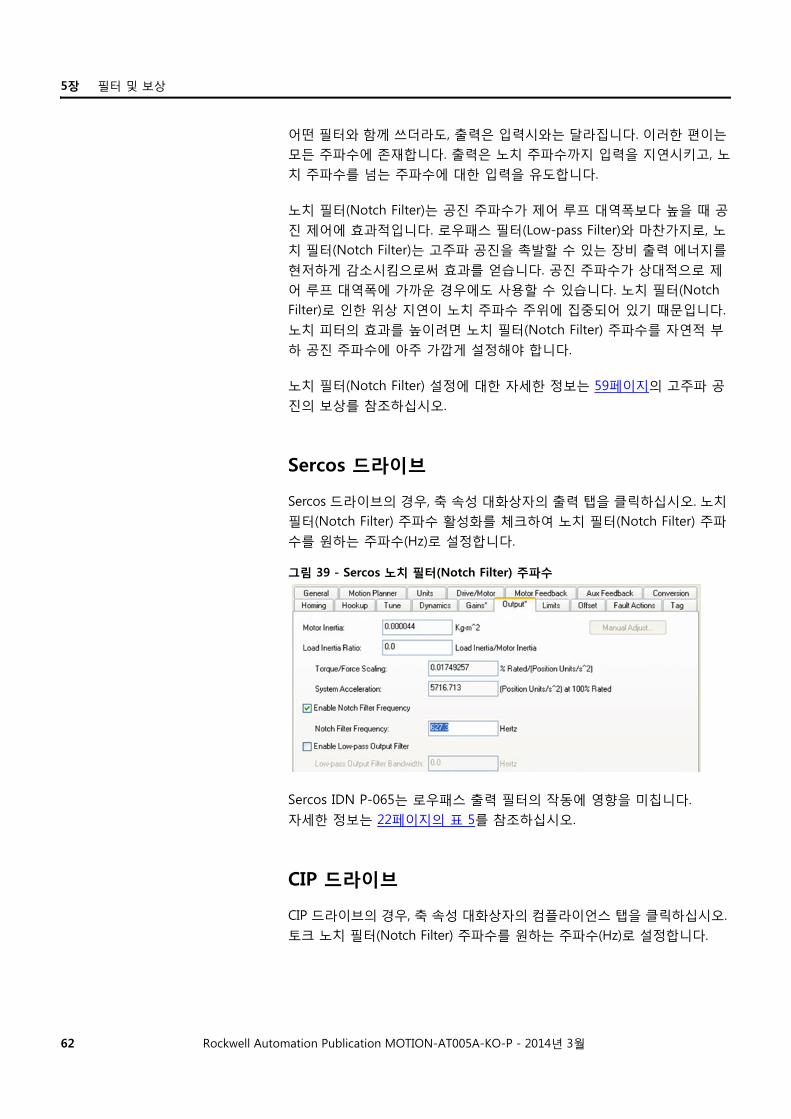
Sercos 드라이브
Sercos 드라이브의 경우, 축 속성 대화상자의 출력 탭을 클릭하십시오. 노치
필터(Notch Filter) 주파수 활성화를 체크하여 노치 필터(Notch Filter) 주파
수를 원하는 주파수(Hz)로 설정합니다.
그림 39 - Sercos 노치 필터(Notch Filter) 주파수
Sercos IDN P-065는 로우패스 출력 필터의 작동에 영향을 미칩니다.
자세한 정보는 22페이지의 표 5를 참조하십시오.
CIP 드라이브
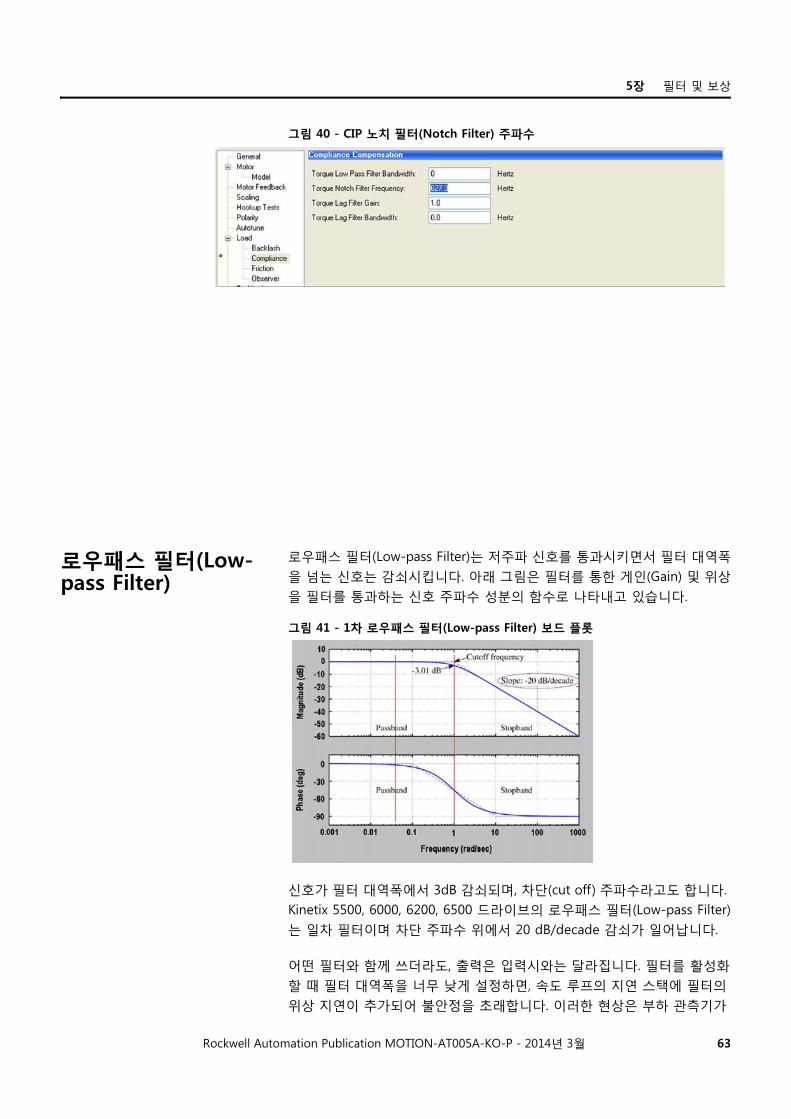
CIP 드라이브의 경우, 축 속성 대화상자의 컴플라이언스 탭을 클릭하십시오.
토크 노치 필터(Notch Filter) 주파수를 원하는 주파수(Hz)로 설정합니다.
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 63
5장 필터 및 보상
그림 40 - CIP 노치 필터(Notch Filter) 주파수
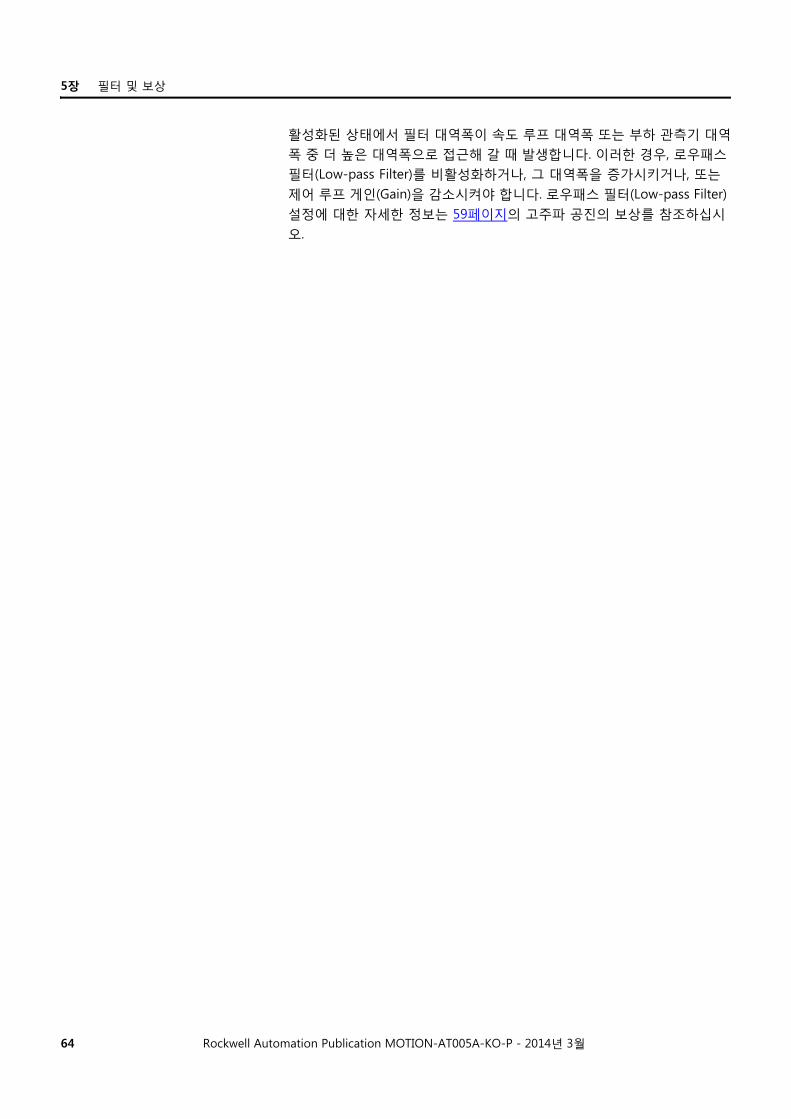
로우패스 필터(Low-pass Filter)
로우패스 필터(Low-pass Filter)는 저주파 신호를 통과시키면서 필터 대역폭
을 넘는 신호는 감쇠시킵니다. 아래 그림은 필터를 통한 게인(Gain) 및 위상
을 필터를 통과하는 신호 주파수 성분의 함수로 나타내고 있습니다.
그림 41 - 1차 로우패스 필터(Low-pass Filter) 보드 플롯
신호가 필터 대역폭에서 3dB 감쇠되며, 차단(cut off) 주파수라고도 합니다.
Kinetix 5500, 6000, 6200, 6500 드라이브의 로우패스 필터(Low-pass Filter)
는 일차 필터이며 차단 주파수 위에서 20 dB/decade 감쇠가 일어납니다.
어떤 필터와 함께 쓰더라도, 출력은 입력시와는 달라집니다. 필터를 활성화
할 때 필터 대역폭을 너무 낮게 설정하면, 속도 루프의 지연 스택에 필터의
위상 지연이 추가되어 불안정을 초래합니다. 이러한 현상은 부하 관측기가
64 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
5장 필터 및 보상
활성화된 상태에서 필터 대역폭이 속도 루프 대역폭 또는 부하 관측기 대역
폭 중 더 높은 대역폭으로 접근해 갈 때 발생합니다. 이러한 경우, 로우패스
필터(Low-pass Filter)를 비활성화하거나, 그 대역폭을 증가시키거나, 또는
제어 루프 게인(Gain)을 감소시켜야 합니다. 로우패스 필터(Low-pass Filter)
설정에 대한 자세한 정보는 59페이지의 고주파 공진의 보상를 참조하십시
오.
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 65
5장 필터 및 보상
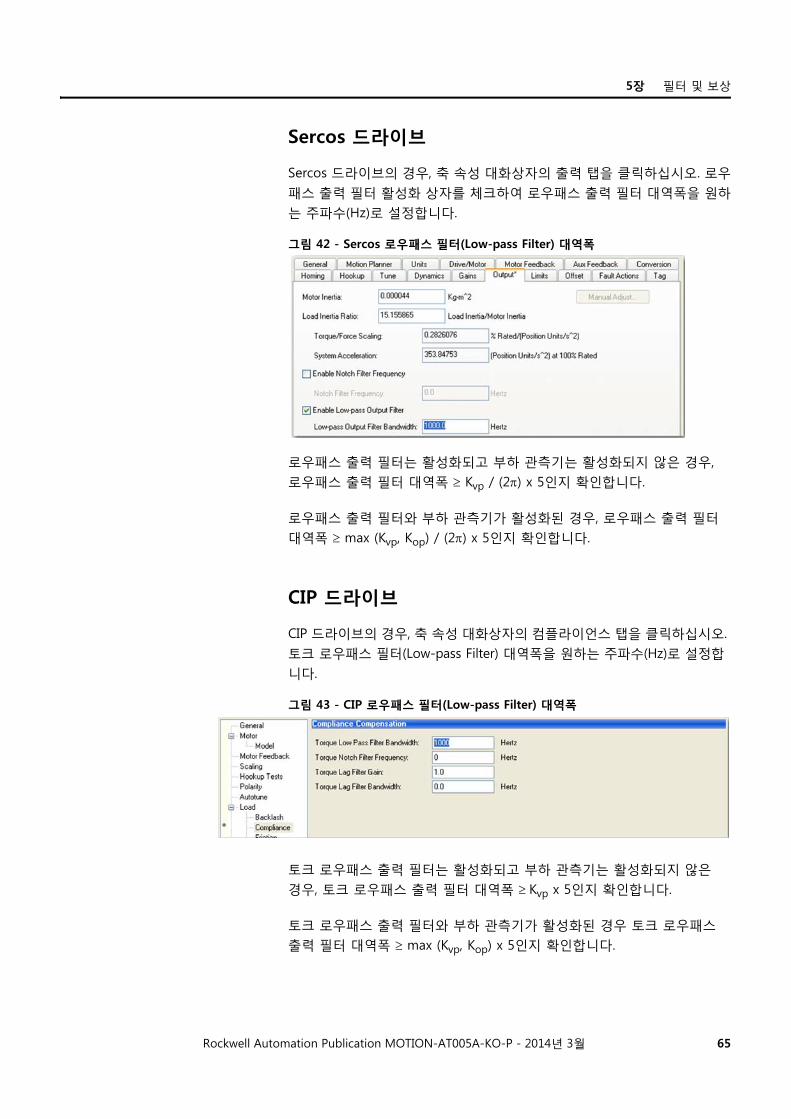
Sercos 드라이브
Sercos 드라이브의 경우, 축 속성 대화상자의 출력 탭을 클릭하십시오. 로우
패스 출력 필터 활성화 상자를 체크하여 로우패스 출력 필터 대역폭을 원하
는 주파수(Hz)로 설정합니다.
그림 42 - Sercos 로우패스 필터(Low-pass Filter) 대역폭
로우패스 출력 필터는 활성화되고 부하 관측기는 활성화되지 않은 경우,
로우패스 출력 필터 대역폭 Kvp / (2) x 5인지 확인합니다.
로우패스 출력 필터와 부하 관측기가 활성화된 경우, 로우패스 출력 필터
대역폭 max (Kvp, Kop) / (2) x 5인지 확인합니다.
CIP 드라이브
CIP 드라이브의 경우, 축 속성 대화상자의 컴플라이언스 탭을 클릭하십시오.
토크 로우패스 필터(Low-pass Filter) 대역폭을 원하는 주파수(Hz)로 설정합
니다.
그림 43 - CIP 로우패스 필터(Low-pass Filter) 대역폭
토크 로우패스 출력 필터는 활성화되고 부하 관측기는 활성화되지 않은
경우, 토크 로우패스 출력 필터 대역폭 Kvp x 5인지 확인합니다.
토크 로우패스 출력 필터와 부하 관측기가 활성화된 경우 토크 로우패스
출력 필터 대역폭 max (Kvp, Kop) x 5인지 확인합니다.
66 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
5장 필터 및 보상
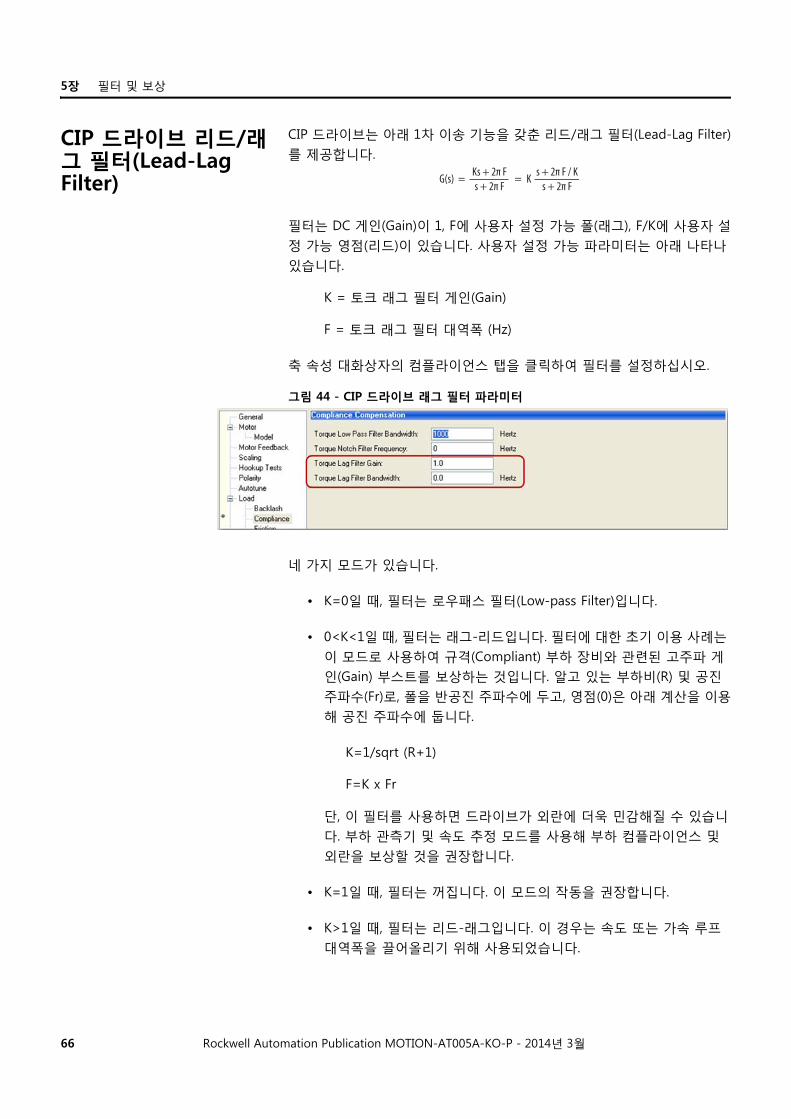
CIP 드라이브 리드/래그 필터(Lead-Lag Filter)
CIP 드라이브는 아래 1차 이송 기능을 갖춘 리드/래그 필터(Lead-Lag Filter)
를 제공합니다.
필터는 DC 게인(Gain)이 1, F에 사용자 설정 가능 폴(래그), F/K에 사용자 설
정 가능 영점(리드)이 있습니다. 사용자 설정 가능 파라미터는 아래 나타나
있습니다.
K = 토크 래그 필터 게인(Gain)
F = 토크 래그 필터 대역폭 (Hz)
축 속성 대화상자의 컴플라이언스 탭을 클릭하여 필터를 설정하십시오.
그림 44 - CIP 드라이브 래그 필터 파라미터
네 가지 모드가 있습니다.
• K=0일 때, 필터는 로우패스 필터(Low-pass Filter)입니다.
• 0<K<1일 때, 필터는 래그-리드입니다. 필터에 대한 초기 이용 사례는
이 모드로 사용하여 규격(Compliant) 부하 장비와 관련된 고주파 게
인(Gain) 부스트를 보상하는 것입니다. 알고 있는 부하비(R) 및 공진
주파수(Fr)로, 폴을 반공진 주파수에 두고, 영점(0)은 아래 계산을 이용
해 공진 주파수에 둡니다.
K=1/sqrt (R+1)
F=K x Fr
단, 이 필터를 사용하면 드라이브가 외란에 더욱 민감해질 수 있습니
다. 부하 관측기 및 속도 추정 모드를 사용해 부하 컴플라이언스 및
외란을 보상할 것을 권장합니다.
• K=1일 때, 필터는 꺼집니다. 이 모드의 작동을 권장합니다.
• K>1일 때, 필터는 리드-래그입니다. 이 경우는 속도 또는 가속 루프
대역폭을 끌어올리기 위해 사용되었습니다.
G(s) K=s + 2π F
Ks + 2π F=
s + 2π F
s + 2π F / K
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 67
5장 필터 및 보상
마찰 보상 마찰 보상은 보상 방향 토크 또는 힘을 모터에 적용하여 기계 시스템의 마
찰 영향을 극복하고 소요되는 제어 노력을 줄이는 것입니다. 정지 마찰, 슬
라이딩(쿨롬) 마찰, 점성 마찰의 보상을 지원하기 위해 개별 특성이 정의되
어 있습니다. 기존의 마찰 보상 방식과 관련된 모터 디더링(dithering)을 완
화시키기 위해 보상 창 특성도 제공합니다.
정지 마찰
기계 부하에 충분한 정지 마찰이 있는 것은 특이한 일이 아니며, 이를 대개
‘스틱션(sticktion)’이라고 합니다. 이 때 기계 부하는 중요한 위치 에러가 있
더라도 이동을 거부합니다. 위치 적분 게인(Gain)을 사용해 충분한 드라이
브 출력을 발생시켜 에러를 수정할 수 있으나, 어떤 애플리케이션에서는 이
러한 방법으로 즉각적인 반응이 없을 수 있습니다. 한 가지 대안책은 정지
마찰 보상을 사용하여 넌제로(non-zero) 위치 에러가 존재하는 가운데 스틱
션(sticktion)을 중단시키는 것입니다. 이 방법은 정지 마찰 보상 특성에 의
해 결정되는, 고정 토크 수준을 현재 신호를 기준으로 한 토크 기준 신호 값
에 더하거나 뺌으로써 이루어집니다. 이러한 형식의 마찰 보상은 드라이브
가 정지되어 있는 경우 즉, 위치 명령에 아무 변경이 없을 때 적용됩니다.
정지 마찰 보상 값은 스틱션을 극복하는 값 바로 밑의 값으로 해야 합니다.
값이 더 크면 ‘디더(dither)’가 발생하는데, 스틱션을 과도 보상하면서 명령
된 위치를 중심으로 한 부하의 빠른 전후 모션을 뜻하는 현상입니다.
정지 마찰 보상을 적용할 때 디더 문제를 해결하려면, 부하가 정지해 있을
때 현재 명령 위치 주위에 마찰 보상 창을 적용합니다. 마찰 보상 창 내에
실제 위치 에러가 있는 경우, 정지 마찰 보상 값을 서보 드라이브 출력에 적
용하지만, 위치 에러 신호 대 마찰 보상 창의 비율로 스케일링됩니다. 적분
기가 포화되면 발생하는 헌팅 효과를 방지하기 위해 창 내에서 위치 루프
및 속도 루프 적분기도 비활성화 됩니다. 그러므로, 위치 에러가 마찰 보상
창 특성 값에 접근하거나 그 값을 초과하는 즉시, 전체 정지 마찰 보상 값이
적용됩니다. 0의 마찰 보상 창 값은 이러한 기능을 효과적으로 비활성화합
니다.
넌제로(non-zero) 마찰 보상 창은 토크 기준에 적용되는 경우 정지 마찰 보
상을 효과적으로 약화시키고, 이로 인해 생성될 수 있는 디더링 및 헌팅 효
과를 감소시킵니다. 이 기능은 더 높은 정지 마찰 보상 값이 적용되도록 함
으로써, 더 우수한 포인트투포인트 (point-to-point) 포지셔닝 결과를 얻습
니다.
68 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
5장 필터 및 보상
슬라이딩 마찰
슬라이딩 마찰 또는 쿨롬 마찰은 기계 부하가 이동하는 한 속도와 관계 없는
마찰 요소입니다. 슬라이딩 마찰은 특정 기계 시스템에 대해 언제나 정지 마
찰보다 작습니다. 슬라이딩 마찰 보상 방법은 기본적으로 정지 마찰과 동일
하지만, 토크 기준 신호에 추가되는 토크 수준은 정지 마찰을 극복하기 위해
적용되는 것보다 작으며, 슬라이딩 마찰 보상 특성에 의해 결정됩니다. 슬라
이딩 마찰 보상은 모터에 이동 명령이 내려진 상태에서만 적용됩니다.
점성 마찰
점성 마찰은 기계 시스템의 속도와 함께 연속적으로 증가하는 마찰 요소로
정의됩니다. 점성 마찰의 보상 방법은 설정된 점성 마찰 보상 값과 모터 속
도를 곱하여 그 결과를 토크 기준 신호에 적용하는 것입니다. 점성 마찰 보
상은 모터에 이동 명령이 내려진 상태에서만 적용됩니다.
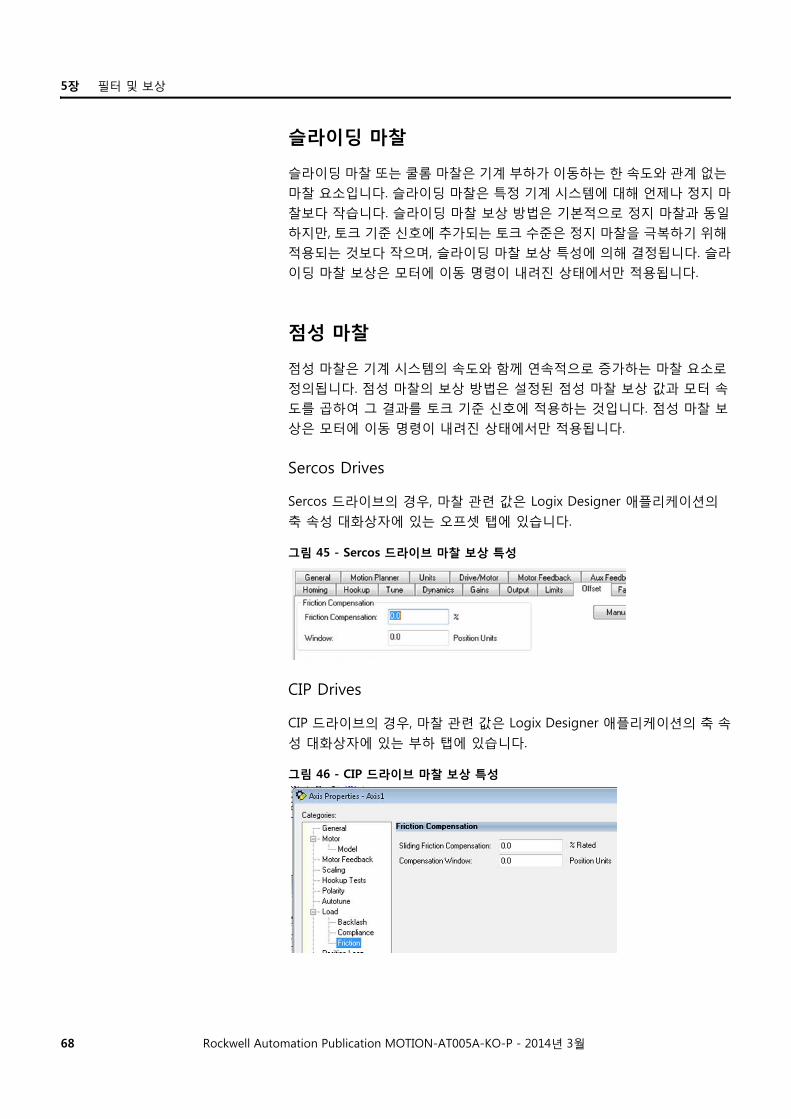
Sercos Drives
Sercos 드라이브의 경우, 마찰 관련 값은 Logix Designer 애플리케이션의
축 속성 대화상자에 있는 오프셋 탭에 있습니다.
그림 45 - Sercos 드라이브 마찰 보상 특성
CIP Drives
CIP 드라이브의 경우, 마찰 관련 값은 Logix Designer 애플리케이션의 축 속
성 대화상자에 있는 부하 탭에 있습니다.
그림 46 - CIP 드라이브 마찰 보상 특성
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 69
5장 필터 및 보상
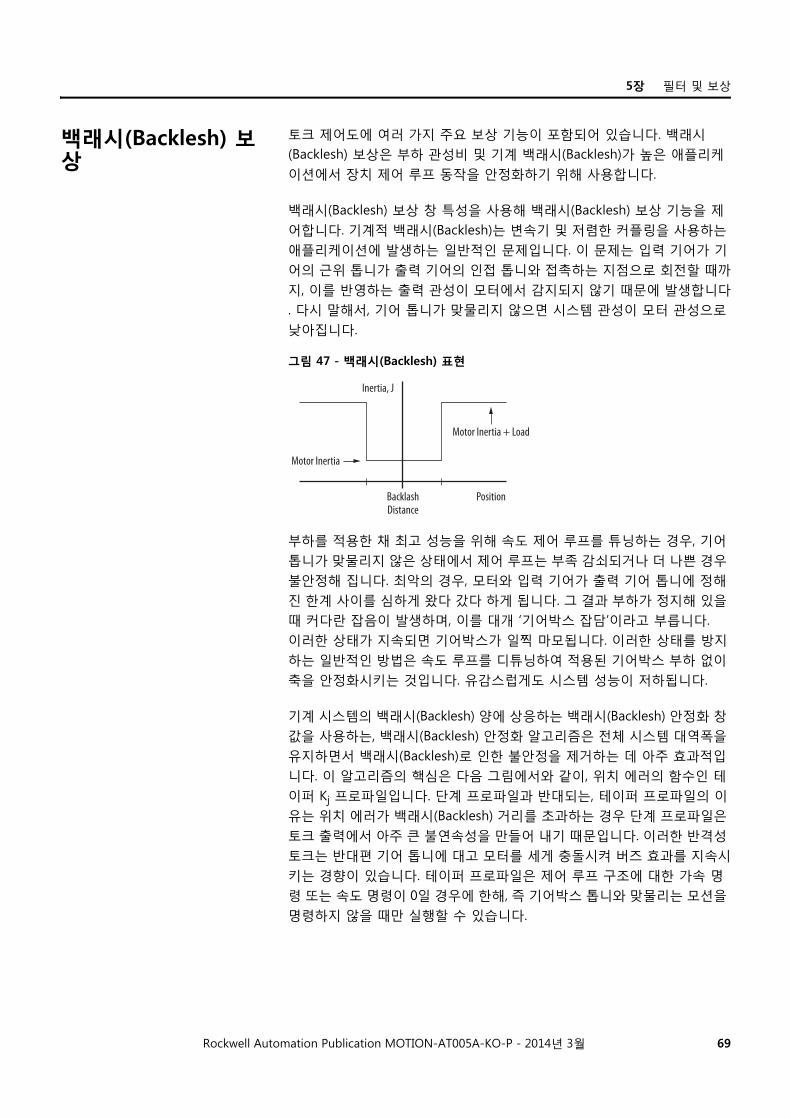
백래시(Backlesh) 보상
토크 제어도에 여러 가지 주요 보상 기능이 포함되어 있습니다. 백래시
(Backlesh) 보상은 부하 관성비 및 기계 백래시(Backlesh)가 높은 애플리케
이션에서 장치 제어 루프 동작을 안정화하기 위해 사용합니다.
백래시(Backlesh) 보상 창 특성을 사용해 백래시(Backlesh) 보상 기능을 제
어합니다. 기계적 백래시(Backlesh)는 변속기 및 저렴한 커플링을 사용하는
애플리케이션에 발생하는 일반적인 문제입니다. 이 문제는 입력 기어가 기
어의 근위 톱니가 출력 기어의 인접 톱니와 접촉하는 지점으로 회전할 때까
지, 이를 반영하는 출력 관성이 모터에서 감지되지 않기 때문에 발생합니다
. 다시 말해서, 기어 톱니가 맞물리지 않으면 시스템 관성이 모터 관성으로
낮아집니다.
그림 47 - 백래시(Backlesh) 표현
부하를 적용한 채 최고 성능을 위해 속도 제어 루프를 튜닝하는 경우, 기어
톱니가 맞물리지 않은 상태에서 제어 루프는 부족 감쇠되거나 더 나쁜 경우
불안정해 집니다. 최악의 경우, 모터와 입력 기어가 출력 기어 톱니에 정해
진 한계 사이를 심하게 왔다 갔다 하게 됩니다. 그 결과 부하가 정지해 있을
때 커다란 잡음이 발생하며, 이를 대개 ‘기어박스 잡담’이라고 부릅니다.
이러한 상태가 지속되면 기어박스가 일찍 마모됩니다. 이러한 상태를 방지
하는 일반적인 방법은 속도 루프를 디튜닝하여 적용된 기어박스 부하 없이
축을 안정화시키는 것입니다. 유감스럽게도 시스템 성능이 저하됩니다.
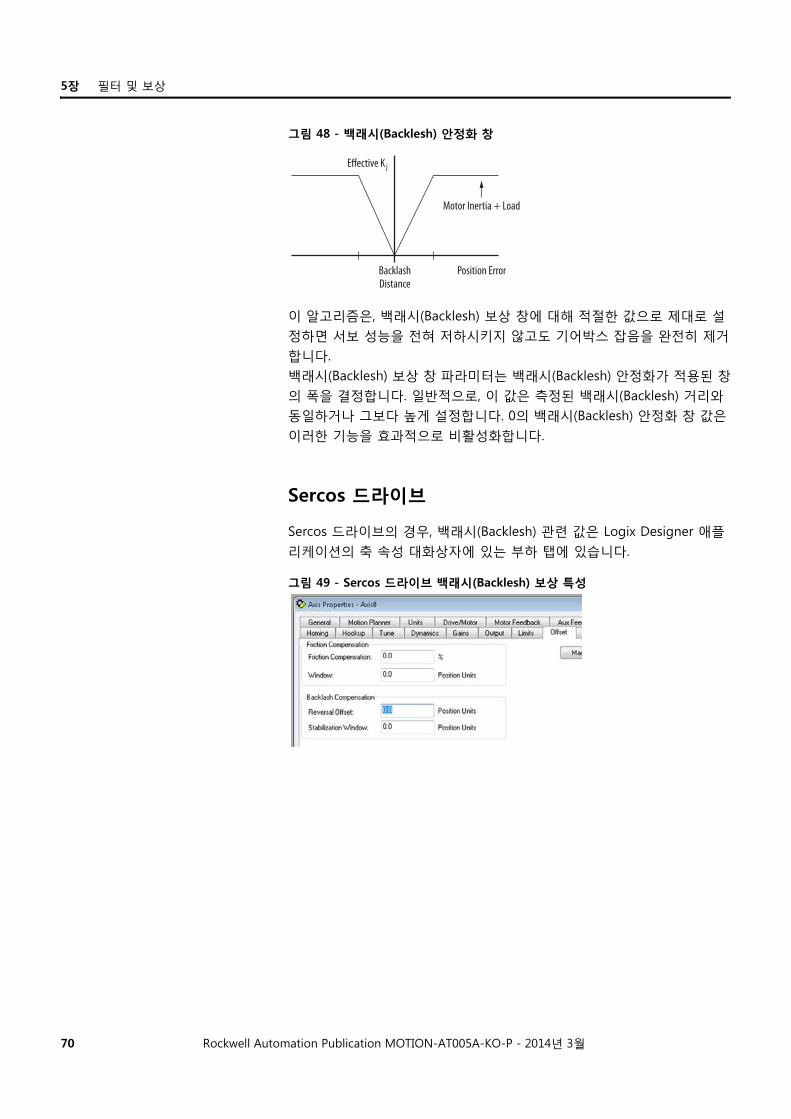
기계 시스템의 백래시(Backlesh) 양에 상응하는 백래시(Backlesh) 안정화 창
값을 사용하는, 백래시(Backlesh) 안정화 알고리즘은 전체 시스템 대역폭을
유지하면서 백래시(Backlesh)로 인한 불안정을 제거하는 데 아주 효과적입
니다. 이 알고리즘의 핵심은 다음 그림에서와 같이, 위치 에러의 함수인 테
이퍼 Kj 프로파일입니다. 단계 프로파일과 반대되는, 테이퍼 프로파일의 이
유는 위치 에러가 백래시(Backlesh) 거리를 초과하는 경우 단계 프로파일은
토크 출력에서 아주 큰 불연속성을 만들어 내기 때문입니다. 이러한 반격성
토크는 반대편 기어 톱니에 대고 모터를 세게 충돌시켜 버즈 효과를 지속시
키는 경향이 있습니다. 테이퍼 프로파일은 제어 루프 구조에 대한 가속 명
령 또는 속도 명령이 0일 경우에 한해, 즉 기어박스 톱니와 맞물리는 모션을
명령하지 않을 때만 실행할 수 있습니다.
Motor Inertia
Position
Motor Inertia + Load
BacklashDistance
Inertia, J
70 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
5장 필터 및 보상
그림 48 - 백래시(Backlesh) 안정화 창
이 알고리즘은, 백래시(Backlesh) 보상 창에 대해 적절한 값으로 제대로 설
정하면 서보 성능을 전혀 저하시키지 않고도 기어박스 잡음을 완전히 제거
합니다.
백래시(Backlesh) 보상 창 파라미터는 백래시(Backlesh) 안정화가 적용된 창
의 폭을 결정합니다. 일반적으로, 이 값은 측정된 백래시(Backlesh) 거리와
동일하거나 그보다 높게 설정합니다. 0의 백래시(Backlesh) 안정화 창 값은
이러한 기능을 효과적으로 비활성화합니다.
Sercos 드라이브
Sercos 드라이브의 경우, 백래시(Backlesh) 관련 값은 Logix Designer 애플
리케이션의 축 속성 대화상자에 있는 부하 탭에 있습니다.
그림 49 - Sercos 드라이브 백래시(Backlesh) 보상 특성
Position Error
Motor Inertia + Load
BacklashDistance
Effective K j
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 71
5장 필터 및 보상
CIP 드라이브
CIP 드라이브의 경우, 백래시(Backlesh) 관련 값은 Logix Designer 애플리케
이션의 축 속성 대화상자에 있는 부하 탭에 있습니다.
그림 50 - CIP 드라이브 백래시(Backlesh) 보상 특성

72 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
5장 필터 및 보상
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 71
6 장
Kinetix 300 드라이브 튜닝
이 장은 오토 튜닝 방법을 설명하고, Kinetix 300 드라이브 제어 루프 및 필
터 그리고 그 사용 방법을 설명합니다. 아래 설명하는 오토 튜닝 방법는 대
부분의 애플리케이션에 적합합니다.
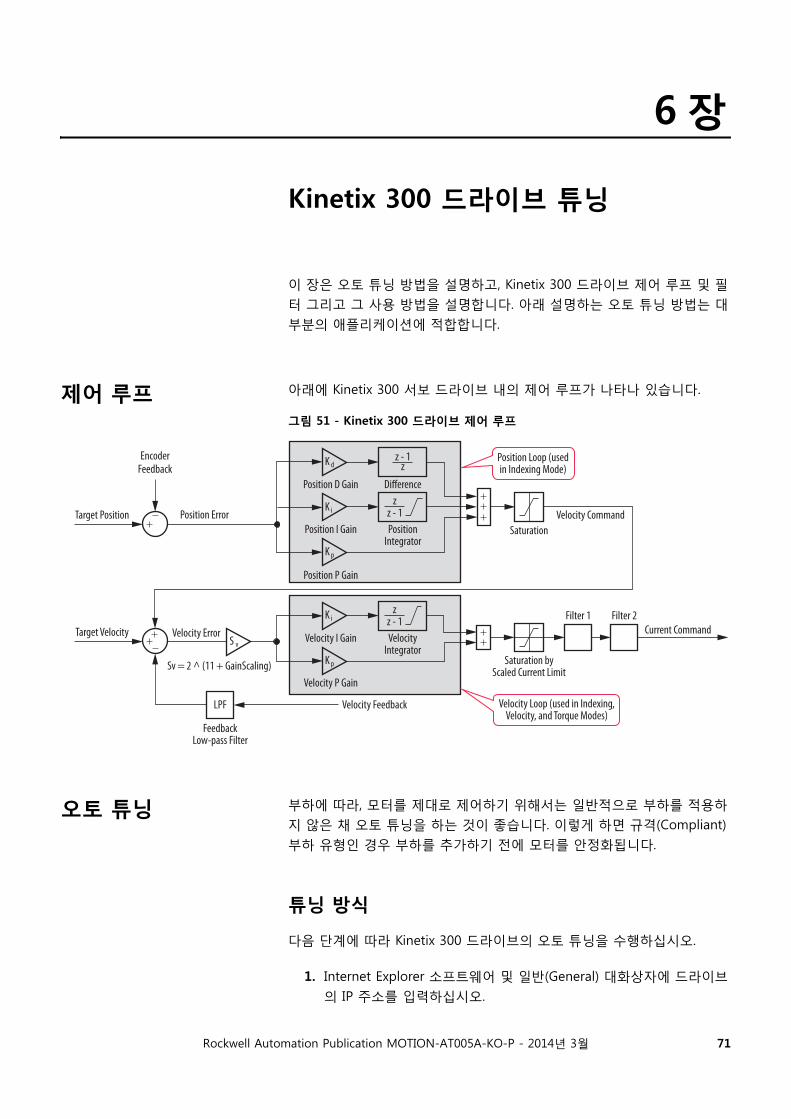
제어 루프 아래에 Kinetix 300 서보 드라이브 내의 제어 루프가 나타나 있습니다.
그림 51 - Kinetix 300 드라이브 제어 루프
오토 튜닝 부하에 따라, 모터를 제대로 제어하기 위해서는 일반적으로 부하를 적용하
지 않은 채 오토 튜닝을 하는 것이 좋습니다. 이렇게 하면 규격(Compliant)
부하 유형인 경우 부하를 추가하기 전에 모터를 안정화됩니다.
튜닝 방식
다음 단계에 따라 Kinetix 300 드라이브의 오토 튜닝을 수행하십시오.
1. Internet Explorer 소프트웨어 및 일반(General) 대화상자에 드라이브
의 IP 주소를 입력하십시오.
Position D Gain Difference
Position I Gain PositionIntegrator
Position P Gain
EncoderFeedback
Target Position Position Error
K d
K i
K p
Target Velocity
Sv = 2 ^ (11 + GainScaling)
Velocity Error
Velocity Feedback
Saturation byScaled Current Limit
Filter 1 Filter 2
Saturation
Position Loop (usedin Indexing Mode)
Velocity Loop (used in Indexing,Velocity, and Torque Modes)
FeedbackLow-pass Filter
Current Command
zz - 1
zz - 1
Velocity I Gain VelocityIntegrator
Velocity P Gain
K i
K p
S v
zz - 1
LPF
Velocity Command
72 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
6장 Kinetix 300 드라이브 튜닝
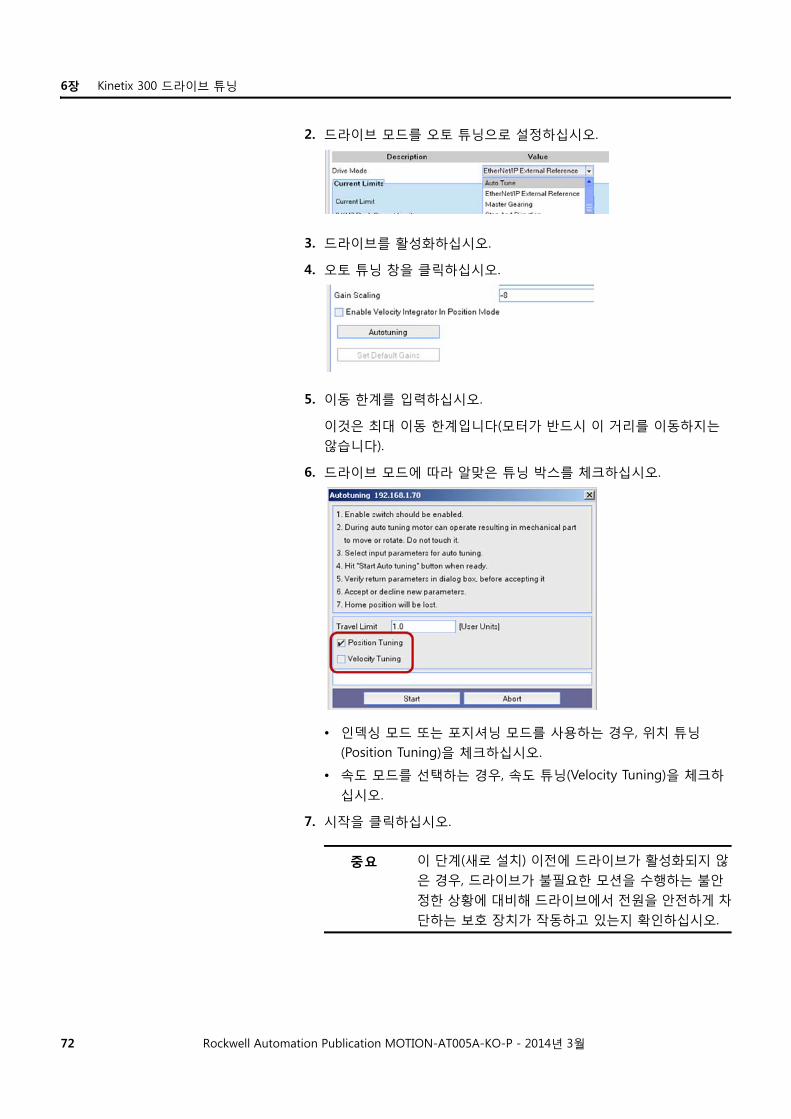
2. 드라이브 모드를 오토 튜닝으로 설정하십시오.
3. 드라이브를 활성화하십시오.
4. 오토 튜닝 창을 클릭하십시오.
5. 이동 한계를 입력하십시오.
이것은 최대 이동 한계입니다(모터가 반드시 이 거리를 이동하지는
않습니다).
6. 드라이브 모드에 따라 알맞은 튜닝 박스를 체크하십시오.
• 인덱싱 모드 또는 포지셔닝 모드를 사용하는 경우, 위치 튜닝
(Position Tuning)을 체크하십시오.
• 속도 모드를 선택하는 경우, 속도 튜닝(Velocity Tuning)을 체크하
십시오.
7. 시작을 클릭하십시오.
중요 이 단계(새로 설치) 이전에 드라이브가 활성화되지 않
은 경우, 드라이브가 불필요한 모션을 수행하는 불안
정한 상황에 대비해 드라이브에서 전원을 안전하게 차
단하는 보호 장치가 작동하고 있는지 확인하십시오.
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 73
6장 Kinetix 300 드라이브 튜닝
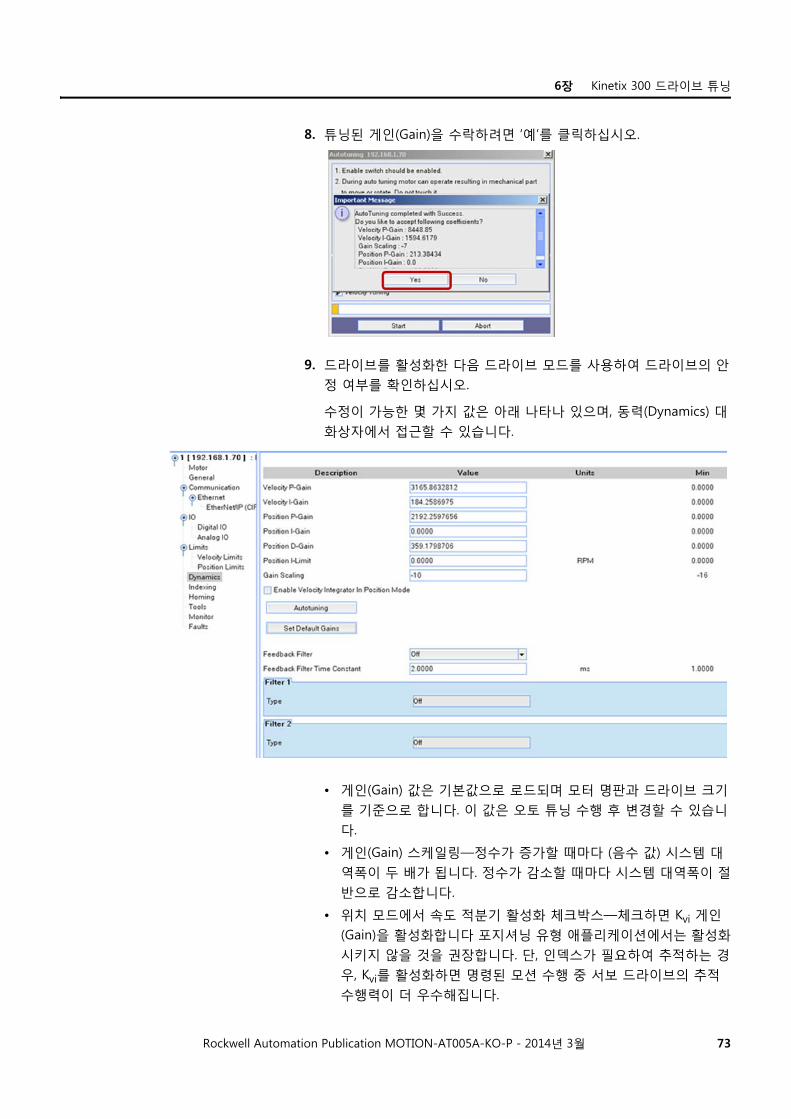
8. 튜닝된 게인(Gain)을 수락하려면 ‘예’를 클릭하십시오.
9. 드라이브를 활성화한 다음 드라이브 모드를 사용하여 드라이브의 안
정 여부를 확인하십시오.
수정이 가능한 몇 가지 값은 아래 나타나 있으며, 동력(Dynamics) 대
화상자에서 접근할 수 있습니다.
• 게인(Gain) 값은 기본값으로 로드되며 모터 명판과 드라이브 크기
를 기준으로 합니다. 이 값은 오토 튜닝 수행 후 변경할 수 있습니
다.
• 게인(Gain) 스케일링—정수가 증가할 때마다 (음수 값) 시스템 대
역폭이 두 배가 됩니다. 정수가 감소할 때마다 시스템 대역폭이 절
반으로 감소합니다.
• 위치 모드에서 속도 적분기 활성화 체크박스—체크하면 Kvi 게인
(Gain)을 활성화합니다 포지셔닝 유형 애플리케이션에서는 활성화
시키지 않을 것을 권장합니다. 단, 인덱스가 필요하여 추적하는 경
우, Kvi를 활성화하면 명령된 모션 수행 중 서보 드라이브의 추적
수행력이 더 우수해집니다.
74 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
6장 Kinetix 300 드라이브 튜닝
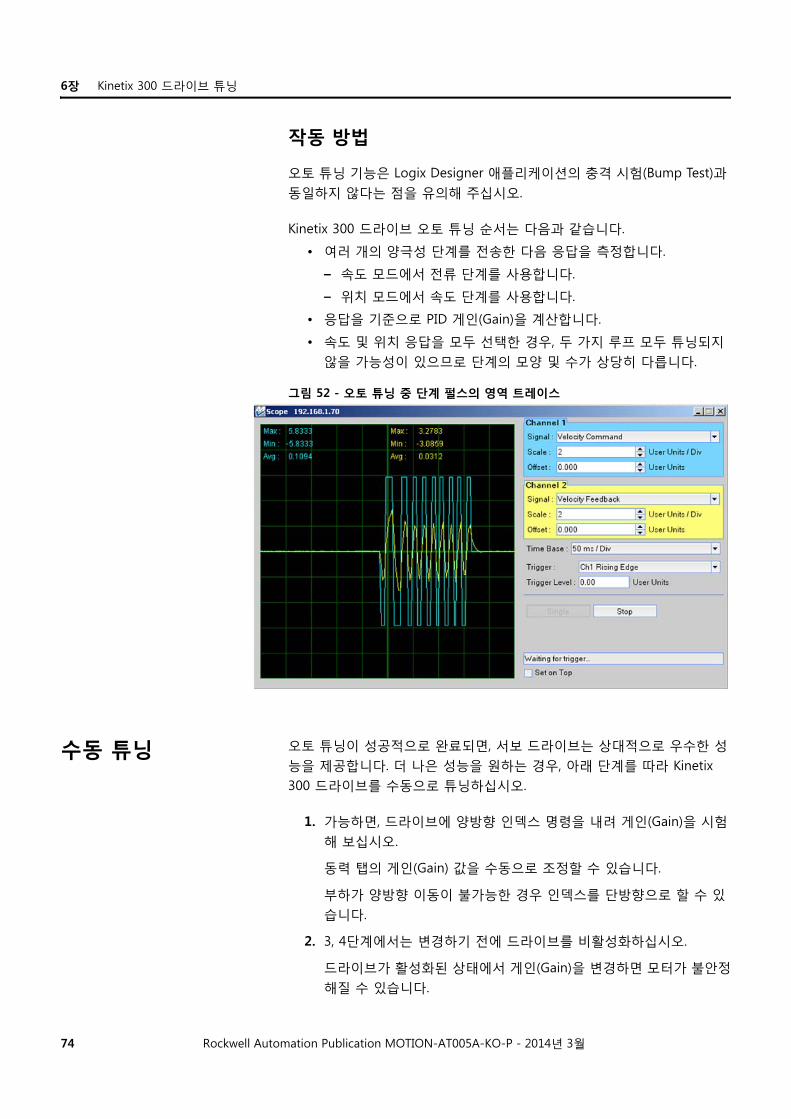
작동 방법
오토 튜닝 기능은 Logix Designer 애플리케이션의 충격 시험(Bump Test)과
동일하지 않다는 점을 유의해 주십시오.
Kinetix 300 드라이브 오토 튜닝 순서는 다음과 같습니다.
• 여러 개의 양극성 단계를 전송한 다음 응답을 측정합니다.
– 속도 모드에서 전류 단계를 사용합니다.
– 위치 모드에서 속도 단계를 사용합니다.
• 응답을 기준으로 PID 게인(Gain)을 계산합니다.
• 속도 및 위치 응답을 모두 선택한 경우, 두 가지 루프 모두 튜닝되지
않을 가능성이 있으므로 단계의 모양 및 수가 상당히 다릅니다.
그림 52 - 오토 튜닝 중 단계 펄스의 영역 트레이스
수동 튜닝 오토 튜닝이 성공적으로 완료되면, 서보 드라이브는 상대적으로 우수한 성
능을 제공합니다. 더 나은 성능을 원하는 경우, 아래 단계를 따라 Kinetix
300 드라이브를 수동으로 튜닝하십시오.
1. 가능하면, 드라이브에 양방향 인덱스 명령을 내려 게인(Gain)을 시험
해 보십시오.
동력 탭의 게인(Gain) 값을 수동으로 조정할 수 있습니다.
부하가 양방향 이동이 불가능한 경우 인덱스를 단방향으로 할 수 있
습니다.
2. 3, 4단계에서는 변경하기 전에 드라이브를 비활성화하십시오.
드라이브가 활성화된 상태에서 게인(Gain)을 변경하면 모터가 불안정
해질 수 있습니다.
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 75
6장 Kinetix 300 드라이브 튜닝
3. 게인(Gain) 스케일링 값을 변경하십시오.
이 값을 이용하는 것은 CIP 드라이브에 관해 이전 섹션에서 설명한
시스템 대역폭 변경과 유사합니다. 게인(Gain) 스케일링은 정수이며,
아래 인수로 설정합니다.
• 정수가 증가할 때마다 (게인(Gain) 스케일링 값은 음수) 시스템 대
역폭이 두 배가 됩니다.
• 정수가 감소할 때마다 시스템 대역폭이 절반으로 감소합니다.
4. 드라이브가 위치 모드에 있는 경우, 속도 적분기 또는 위치 적분기를
사용해 트래킹 오류를 개선하십시오.
작은 양으로 시작해 오버슈트 및 안정성에 대해 속도를 모니터하면서
증가시킵니다. 시작점으로 Kvp 또는 Kpp 게인(Gain)의 2%가 좋습니다
.
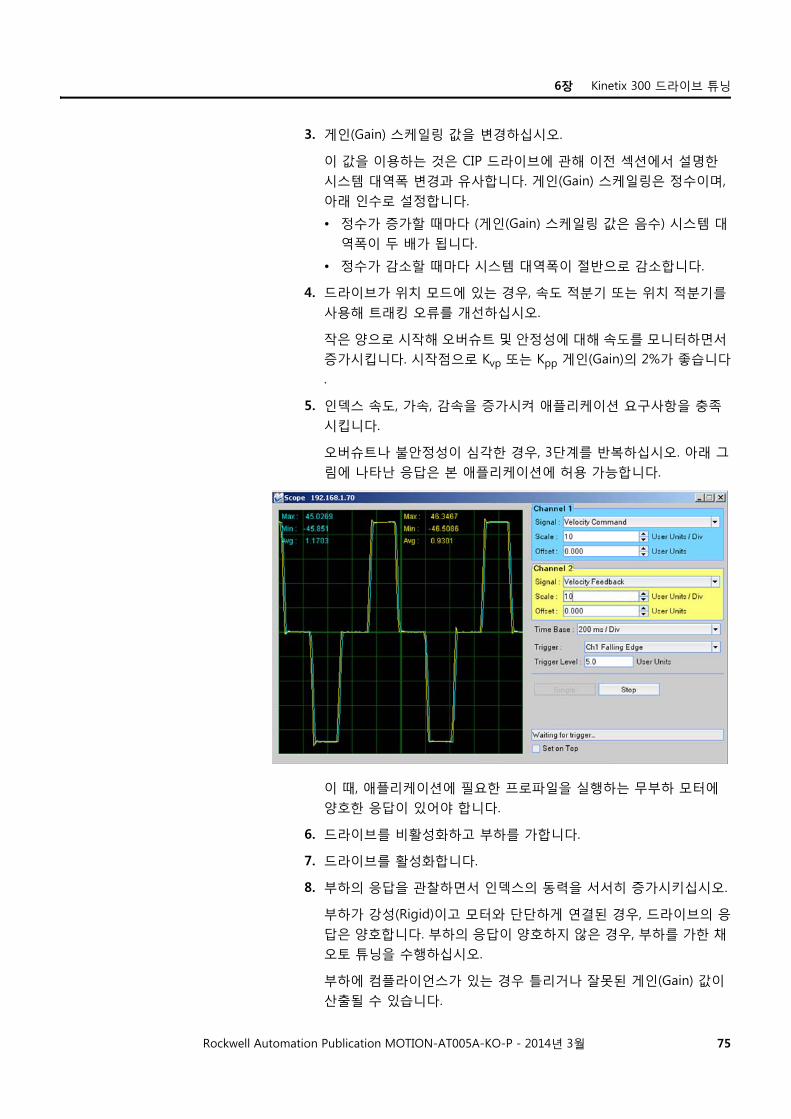
5. 인덱스 속도, 가속, 감속을 증가시켜 애플리케이션 요구사항을 충족
시킵니다.
오버슈트나 불안정성이 심각한 경우, 3단계를 반복하십시오. 아래 그
림에 나타난 응답은 본 애플리케이션에 허용 가능합니다.
이 때, 애플리케이션에 필요한 프로파일을 실행하는 무부하 모터에
양호한 응답이 있어야 합니다.
6. 드라이브를 비활성화하고 부하를 가합니다.
7. 드라이브를 활성화합니다.
8. 부하의 응답을 관찰하면서 인덱스의 동력을 서서히 증가시키십시오.
부하가 강성(Rigid)이고 모터와 단단하게 연결된 경우, 드라이브의 응
답은 양호합니다. 부하의 응답이 양호하지 않은 경우, 부하를 가한 채
오토 튜닝을 수행하십시오.
부하에 컴플라이언스가 있는 경우 틀리거나 잘못된 게인(Gain) 값이
산출될 수 있습니다.
76 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
6장 Kinetix 300 드라이브 튜닝
9. 드라이브 모드에 따라, 인사이드아웃 속도 및 위치 루프 튜닝에 대해
51페이지의 수동 튜닝에 정의된 단계를 이 때 계속 수행할 수도 있습
니다.
59페이지의 고주파 공진의 보상도 참조하십시오.
예
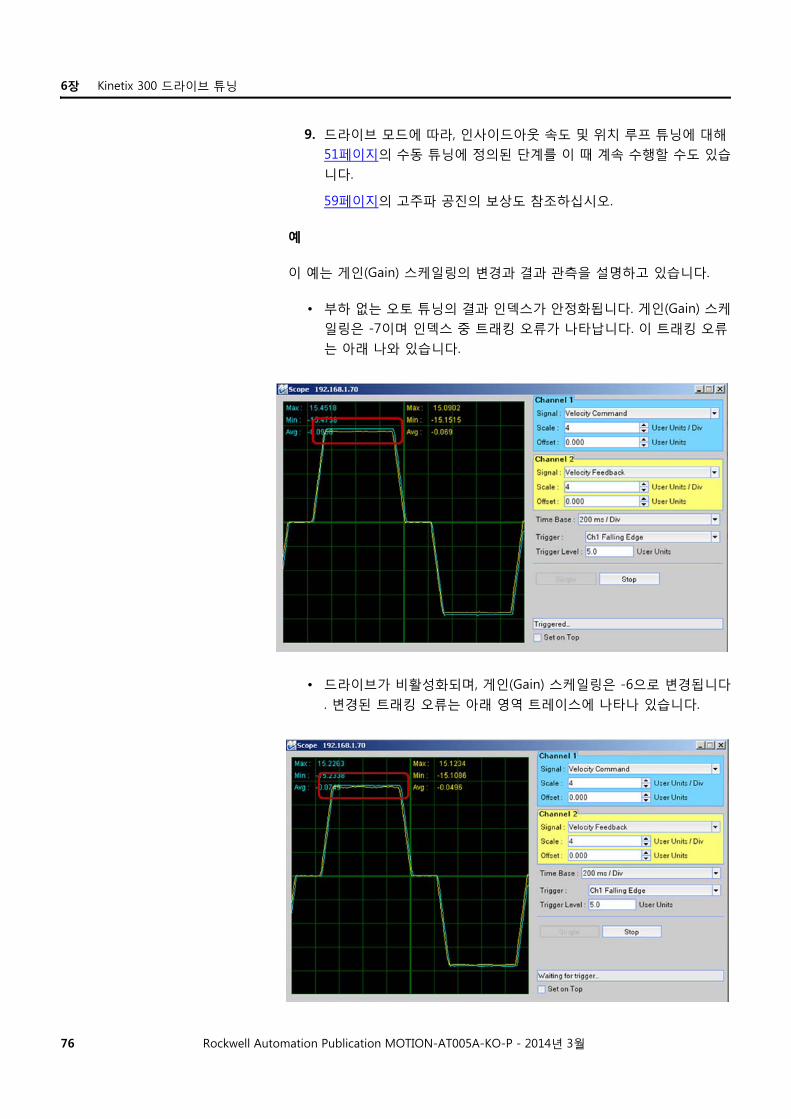
이 예는 게인(Gain) 스케일링의 변경과 결과 관측을 설명하고 있습니다.
• 부하 없는 오토 튜닝의 결과 인덱스가 안정화됩니다. 게인(Gain) 스케
일링은 -7이며 인덱스 중 트래킹 오류가 나타납니다. 이 트래킹 오류
는 아래 나와 있습니다.
• 드라이브가 비활성화되며, 게인(Gain) 스케일링은 -6으로 변경됩니다
. 변경된 트래킹 오류는 아래 영역 트레이스에 나타나 있습니다.
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 77
6장 Kinetix 300 드라이브 튜닝
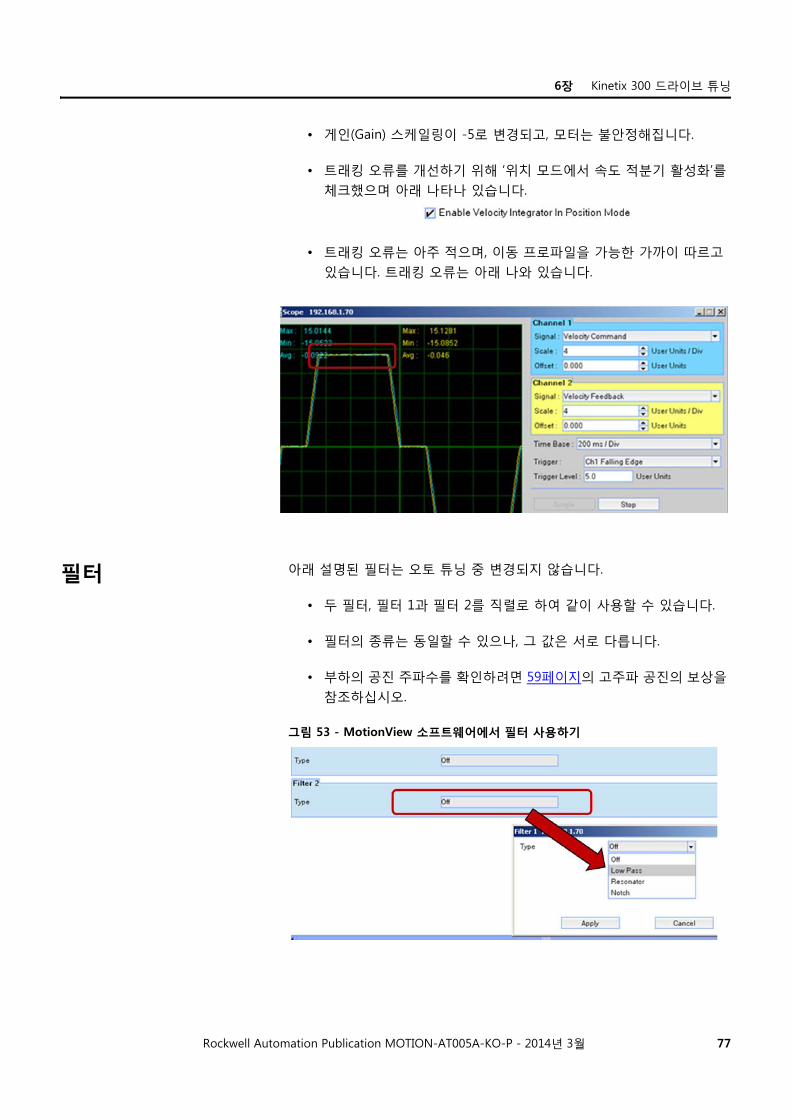
• 게인(Gain) 스케일링이 -5로 변경되고, 모터는 불안정해집니다.
• 트래킹 오류를 개선하기 위해 ‘위치 모드에서 속도 적분기 활성화’를
체크했으며 아래 나타나 있습니다.
• 트래킹 오류는 아주 적으며, 이동 프로파일을 가능한 가까이 따르고
있습니다. 트래킹 오류는 아래 나와 있습니다.
필터 아래 설명된 필터는 오토 튜닝 중 변경되지 않습니다.
• 두 필터, 필터 1과 필터 2를 직렬로 하여 같이 사용할 수 있습니다.
• 필터의 종류는 동일할 수 있으나, 그 값은 서로 다릅니다.
• 부하의 공진 주파수를 확인하려면 59페이지의 고주파 공진의 보상을
참조하십시오.
그림 53 - MotionView 소프트웨어에서 필터 사용하기
78 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
6장 Kinetix 300 드라이브 튜닝
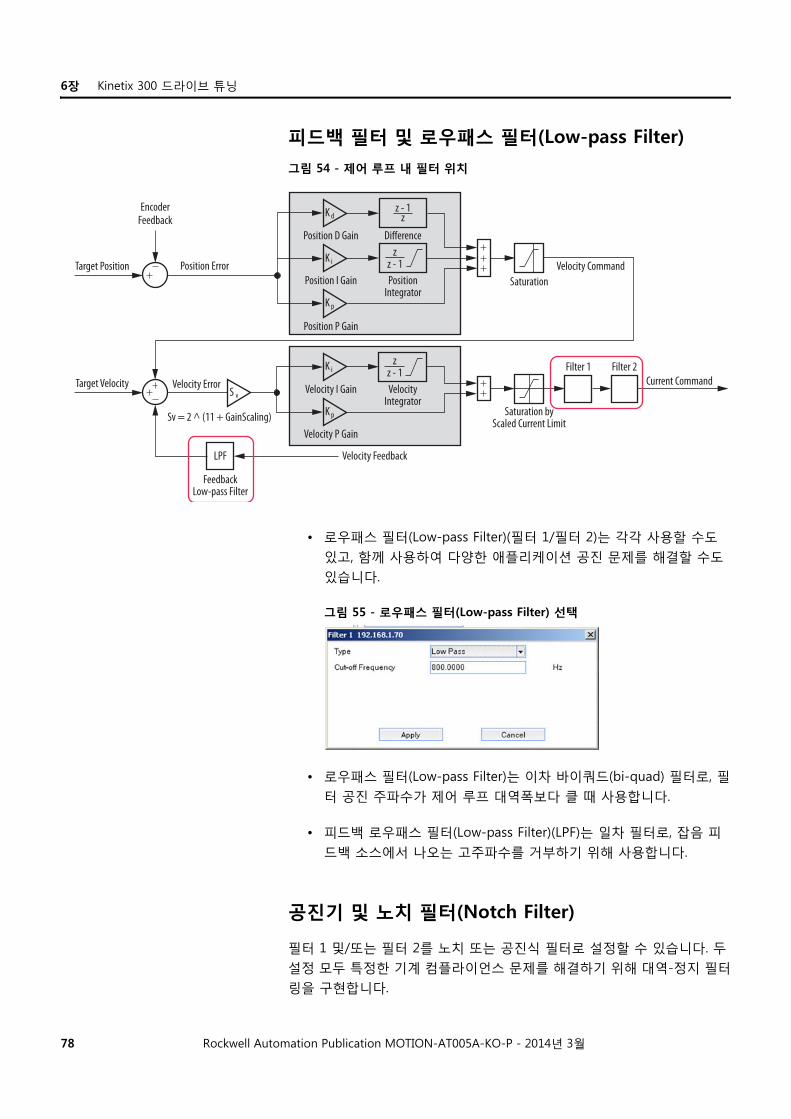
피드백 필터 및 로우패스 필터(Low-pass Filter)
그림 54 - 제어 루프 내 필터 위치
• 로우패스 필터(Low-pass Filter)(필터 1/필터 2)는 각각 사용할 수도
있고, 함께 사용하여 다양한 애플리케이션 공진 문제를 해결할 수도
있습니다.
그림 55 - 로우패스 필터(Low-pass Filter) 선택
• 로우패스 필터(Low-pass Filter)는 이차 바이쿼드(bi-quad) 필터로, 필
터 공진 주파수가 제어 루프 대역폭보다 클 때 사용합니다.
• 피드백 로우패스 필터(Low-pass Filter)(LPF)는 일차 필터로, 잡음 피
드백 소스에서 나오는 고주파수를 거부하기 위해 사용합니다.
공진기 및 노치 필터(Notch Filter)
필터 1 및/또는 필터 2를 노치 또는 공진식 필터로 설정할 수 있습니다. 두
설정 모두 특정한 기계 컴플라이언스 문제를 해결하기 위해 대역-정지 필터
링을 구현합니다.
Position D Gain Difference
Position I Gain PositionIntegrator
Position P Gain
EncoderFeedback
Target Position Position Error
K d
K i
K p
Target Velocity
Sv = 2 ^ (11 + GainScaling)
Velocity Error
Velocity Feedback
Velocity Command
Saturation byScaled Current Limit
Filter 1 Filter 2
Saturation
FeedbackLow-pass Filter
Current Command
zz - 1
zz - 1
Velocity I Gain VelocityIntegrator
Velocity P Gain
K i
K p
S v
zz - 1
LPF
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 79
6장 Kinetix 300 드라이브 튜닝
공진기 필터에는 노치와 약간 다른 이송 기능이 있으며, 감쇠의 깊이를 보
장합니다. 그러므로, 게인(Gain) 계수에 따라 롤오프(roll off)가 달라집니다.
노치 필터(Notch Filter)에는 고정 롤오프가 있으며, 감쇠 게인(Gain)은 감쇠
대역폭 (노치의 폭)에 따라 달라집니다.
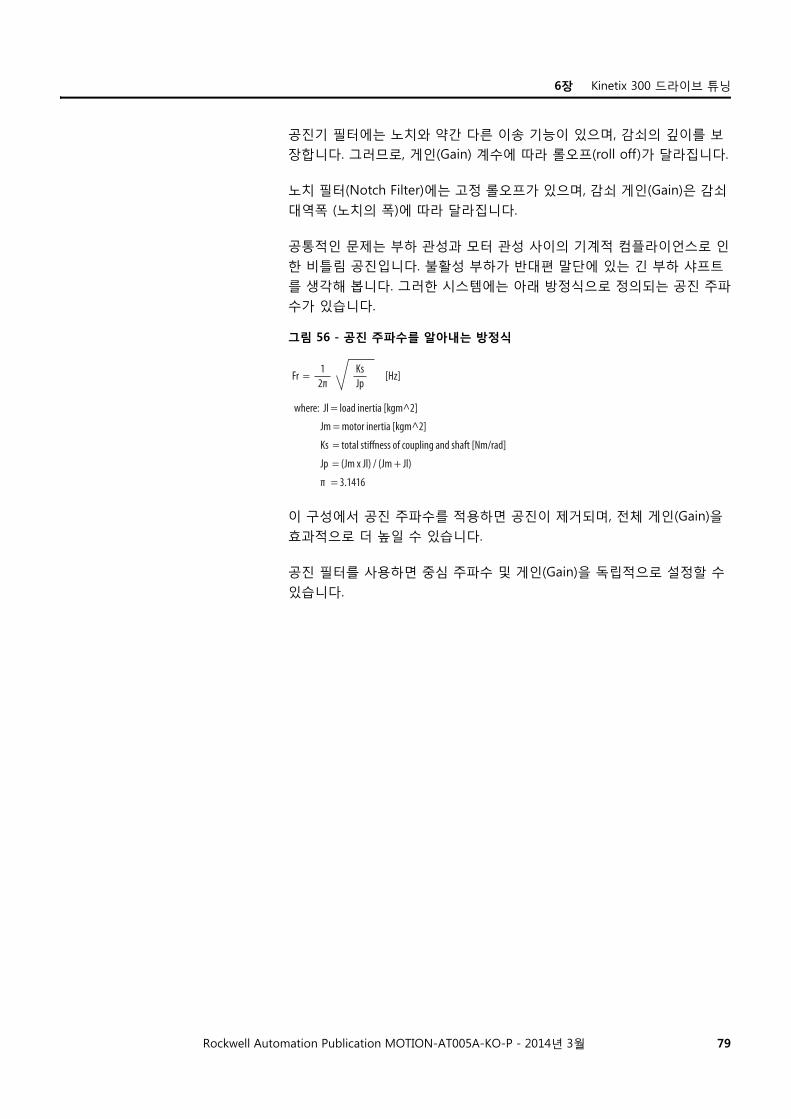
공통적인 문제는 부하 관성과 모터 관성 사이의 기계적 컴플라이언스로 인
한 비틀림 공진입니다. 불활성 부하가 반대편 말단에 있는 긴 부하 샤프트
를 생각해 봅니다. 그러한 시스템에는 아래 방정식으로 정의되는 공진 주파
수가 있습니다.
그림 56 - 공진 주파수를 알아내는 방정식
이 구성에서 공진 주파수를 적용하면 공진이 제거되며, 전체 게인(Gain)을
효과적으로 더 높일 수 있습니다.
공진 필터를 사용하면 중심 주파수 및 게인(Gain)을 독립적으로 설정할 수
있습니다.
Fr = [Hz]2π
1
Jp
Ks
where: Jl = load inertia [kgm^2]
Jm = motor inertia [kgm^2]
Ks = total stiffness of coupling and shaft [Nm/rad]
Jp = (Jm x Jl) / (Jm + Jl)
π = 3.1416

80 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
6장 Kinetix 300 드라이브 튜닝
Notes:
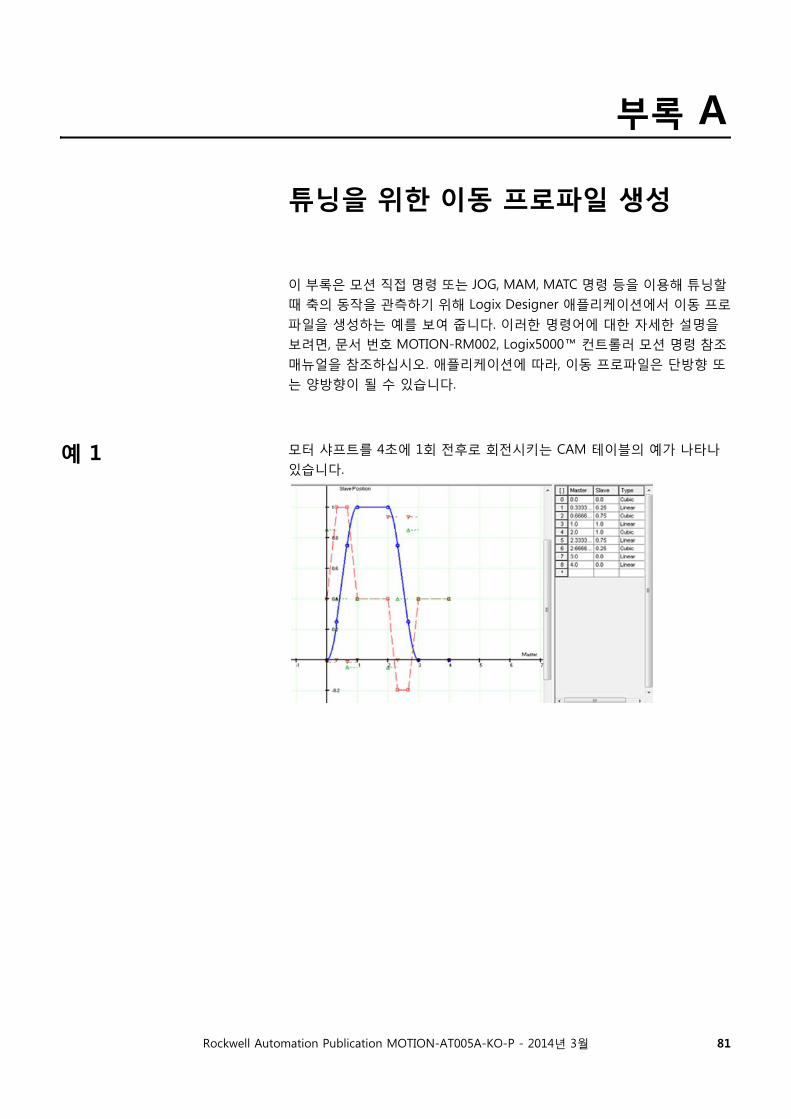
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 81
부록 A
튜닝을 위한 이동 프로파일 생성
이 부록은 모션 직접 명령 또는 JOG, MAM, MATC 명령 등을 이용해 튜닝할
때 축의 동작을 관측하기 위해 Logix Designer 애플리케이션에서 이동 프로
파일을 생성하는 예를 보여 줍니다. 이러한 명령어에 대한 자세한 설명을
보려면, 문서 번호 MOTION-RM002, Logix5000™ 컨트롤러 모션 명령 참조
매뉴얼을 참조하십시오. 애플리케이션에 따라, 이동 프로파일은 단방향 또
는 양방향이 될 수 있습니다.
예 1 모터 샤프트를 4초에 1회 전후로 회전시키는 CAM 테이블의 예가 나타나
있습니다.
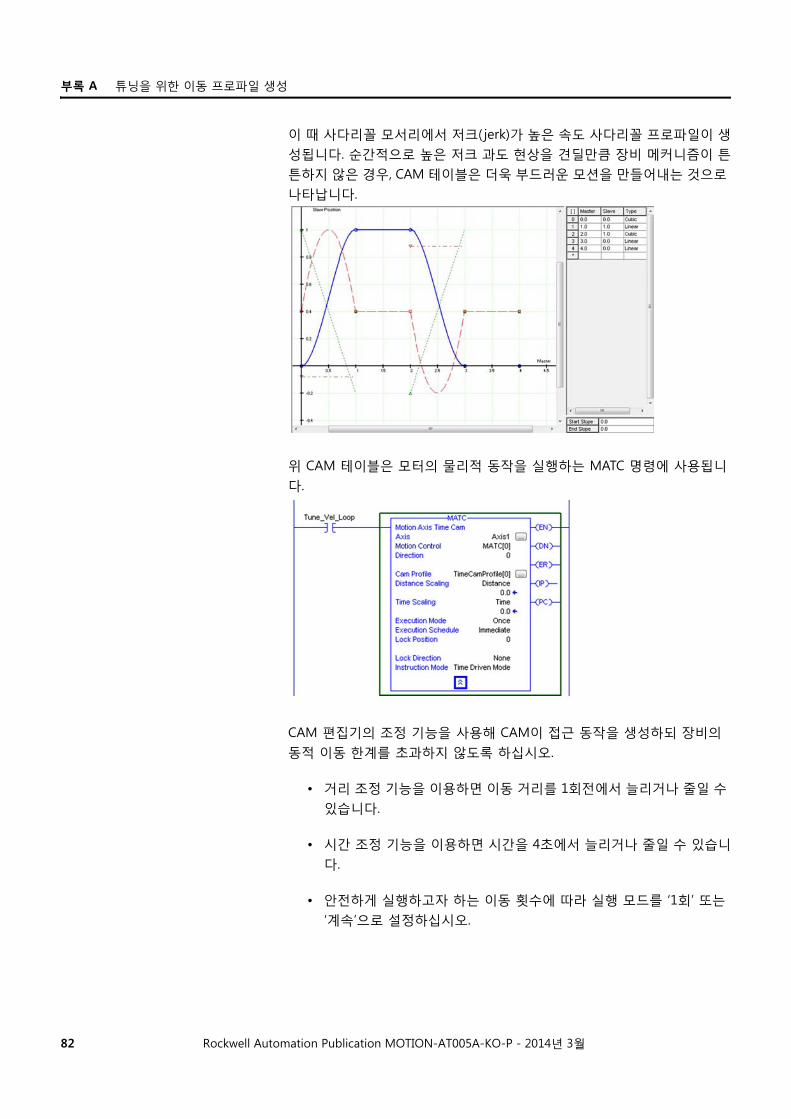
82 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
부록 A 튜닝을 위한 이동 프로파일 생성
이 때 사다리꼴 모서리에서 저크(jerk)가 높은 속도 사다리꼴 프로파일이 생
성됩니다. 순간적으로 높은 저크 과도 현상을 견딜만큼 장비 메커니즘이 튼
튼하지 않은 경우, CAM 테이블은 더욱 부드러운 모션을 만들어내는 것으로
나타납니다.
위 CAM 테이블은 모터의 물리적 동작을 실행하는 MATC 명령에 사용됩니
다.
CAM 편집기의 조정 기능을 사용해 CAM이 접근 동작을 생성하되 장비의
동적 이동 한계를 초과하지 않도록 하십시오.
• 거리 조정 기능을 이용하면 이동 거리를 1회전에서 늘리거나 줄일 수
있습니다.
• 시간 조정 기능을 이용하면 시간을 4초에서 늘리거나 줄일 수 있습니
다.
• 안전하게 실행하고자 하는 이동 횟수에 따라 실행 모드를 ‘1회’ 또는
‘계속’으로 설정하십시오.
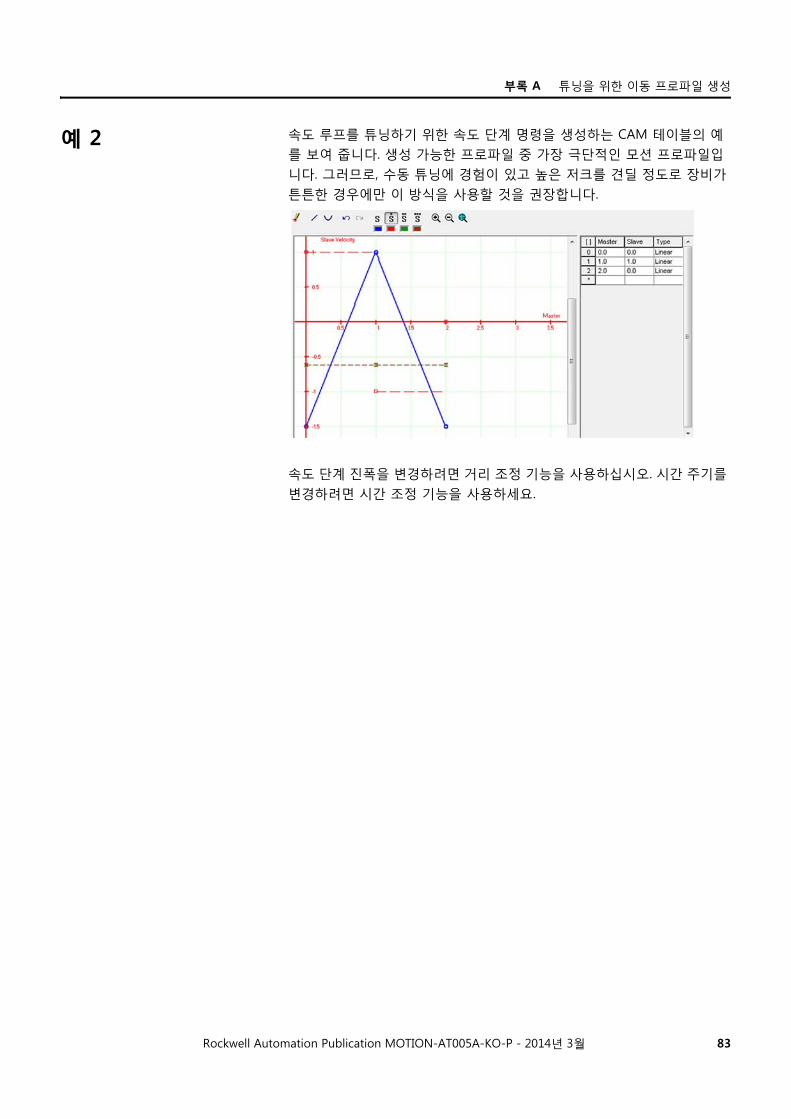
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 83
부록 A 튜닝을 위한 이동 프로파일 생성
예 2 속도 루프를 튜닝하기 위한 속도 단계 명령을 생성하는 CAM 테이블의 예
를 보여 줍니다. 생성 가능한 프로파일 중 가장 극단적인 모션 프로파일입
니다. 그러므로, 수동 튜닝에 경험이 있고 높은 저크를 견딜 정도로 장비가
튼튼한 경우에만 이 방식을 사용할 것을 권장합니다.
속도 단계 진폭을 변경하려면 거리 조정 기능을 사용하십시오. 시간 주기를
변경하려면 시간 조정 기능을 사용하세요.
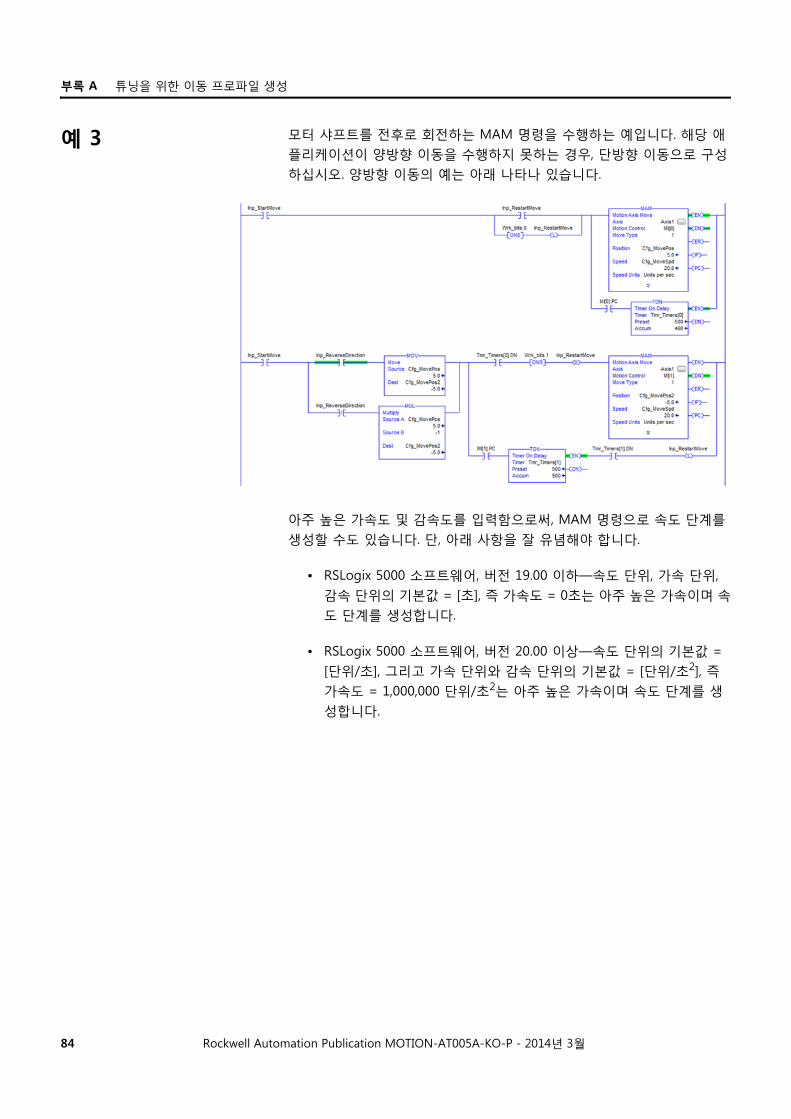
84 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
부록 A 튜닝을 위한 이동 프로파일 생성
예 3 모터 샤프트를 전후로 회전하는 MAM 명령을 수행하는 예입니다. 해당 애
플리케이션이 양방향 이동을 수행하지 못하는 경우, 단방향 이동으로 구성
하십시오. 양방향 이동의 예는 아래 나타나 있습니다.
아주 높은 가속도 및 감속도를 입력함으로써, MAM 명령으로 속도 단계를
생성할 수도 있습니다. 단, 아래 사항을 잘 유념해야 합니다.
• RSLogix 5000 소프트웨어, 버전 19.00 이하—속도 단위, 가속 단위,
감속 단위의 기본값 = [초], 즉 가속도 = 0초는 아주 높은 가속이며 속
도 단계를 생성합니다.
• RSLogix 5000 소프트웨어, 버전 20.00 이상—속도 단위의 기본값 =
[단위/초], 그리고 가속 단위와 감속 단위의 기본값 = [단위/초2], 즉
가속도 = 1,000,000 단위/초2는 아주 높은 가속이며 속도 단계를 생
성합니다.
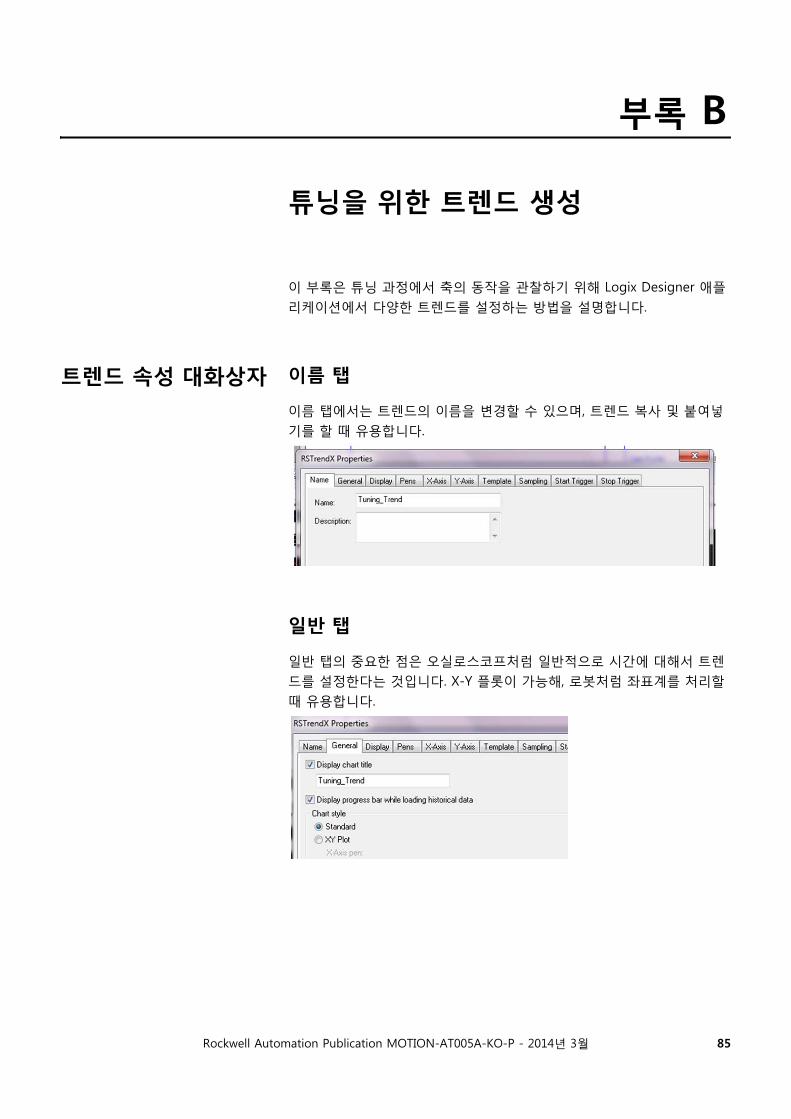
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 85
부록 B
튜닝을 위한 트렌드 생성
이 부록은 튜닝 과정에서 축의 동작을 관찰하기 위해 Logix Designer 애플
리케이션에서 다양한 트렌드를 설정하는 방법을 설명합니다.
트렌드 속성 대화상자 이름 탭
이름 탭에서는 트렌드의 이름을 변경할 수 있으며, 트렌드 복사 및 붙여넣
기를 할 때 유용합니다.
일반 탭
일반 탭의 중요한 점은 오실로스코프처럼 일반적으로 시간에 대해서 트렌
드를 설정한다는 것입니다. X-Y 플롯이 가능해, 로봇처럼 좌표계를 처리할
때 유용합니다.
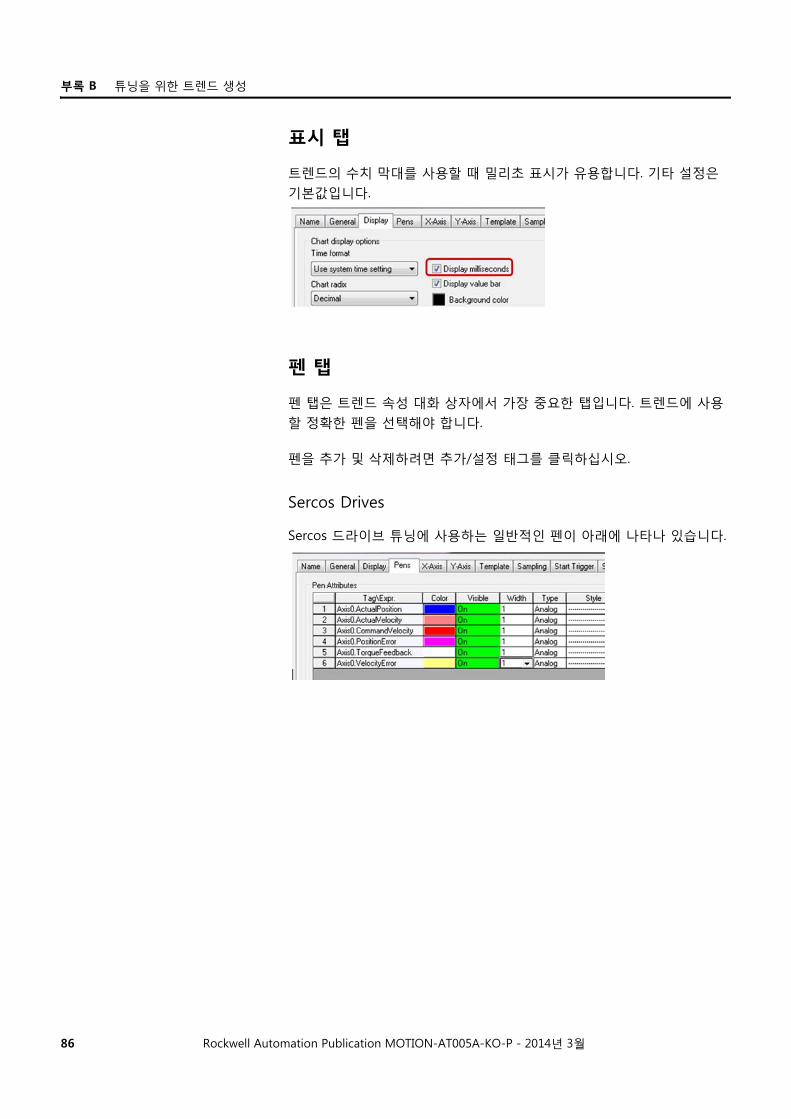
86 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
부록 B 튜닝을 위한 트렌드 생성
표시 탭
트렌드의 수치 막대를 사용할 때 밀리초 표시가 유용합니다. 기타 설정은
기본값입니다.
펜 탭
펜 탭은 트렌드 속성 대화 상자에서 가장 중요한 탭입니다. 트렌드에 사용
할 정확한 펜을 선택해야 합니다.
펜을 추가 및 삭제하려면 추가/설정 태그를 클릭하십시오.
Sercos Drives
Sercos 드라이브 튜닝에 사용하는 일반적인 펜이 아래에 나타나 있습니다.
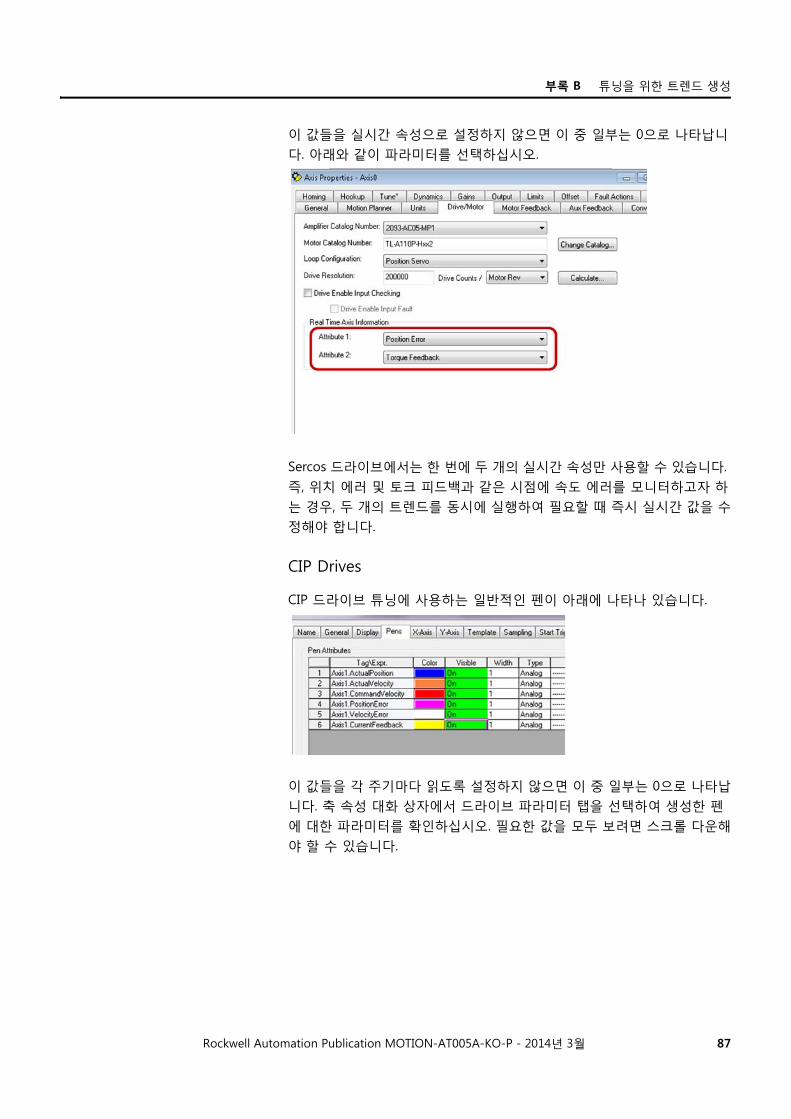
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 87
부록 B 튜닝을 위한 트렌드 생성
이 값들을 실시간 속성으로 설정하지 않으면 이 중 일부는 0으로 나타납니
다. 아래와 같이 파라미터를 선택하십시오.
Sercos 드라이브에서는 한 번에 두 개의 실시간 속성만 사용할 수 있습니다.
즉, 위치 에러 및 토크 피드백과 같은 시점에 속도 에러를 모니터하고자 하
는 경우, 두 개의 트렌드를 동시에 실행하여 필요할 때 즉시 실시간 값을 수
정해야 합니다.
CIP Drives
CIP 드라이브 튜닝에 사용하는 일반적인 펜이 아래에 나타나 있습니다.
이 값들을 각 주기마다 읽도록 설정하지 않으면 이 중 일부는 0으로 나타납
니다. 축 속성 대화 상자에서 드라이브 파라미터 탭을 선택하여 생성한 펜
에 대한 파라미터를 확인하십시오. 필요한 값을 모두 보려면 스크롤 다운해
야 할 수 있습니다.
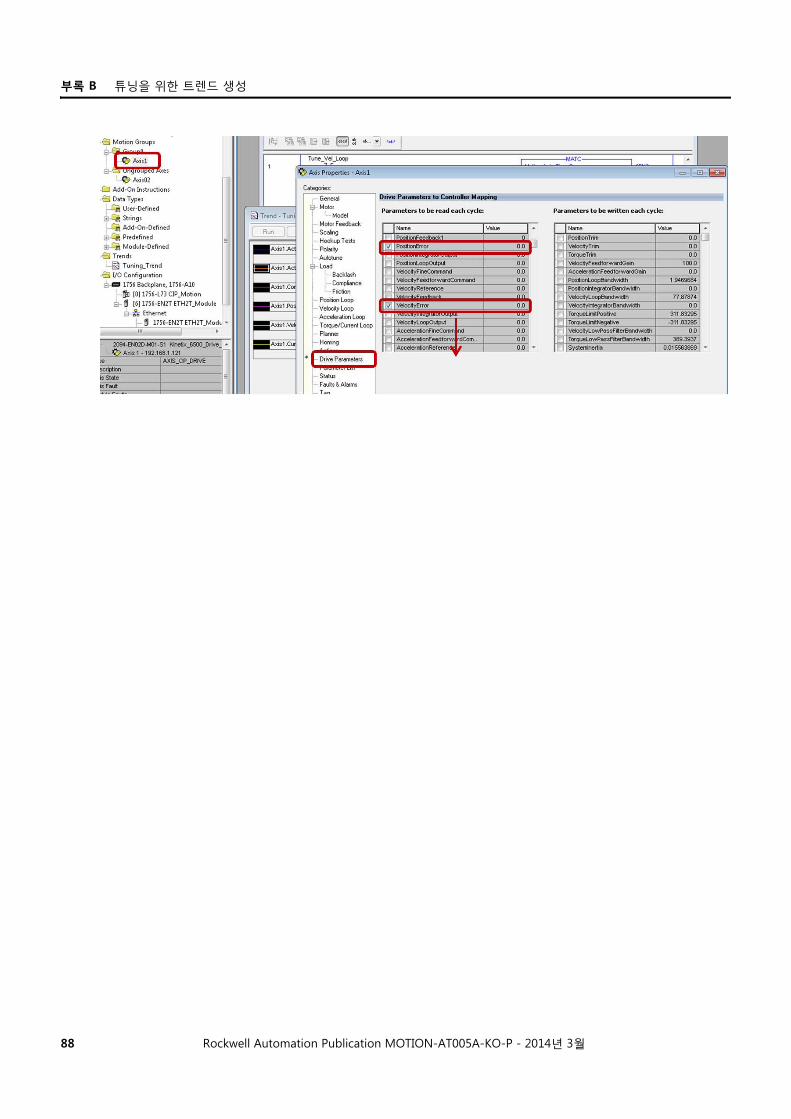
88 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
부록 B 튜닝을 위한 트렌드 생성
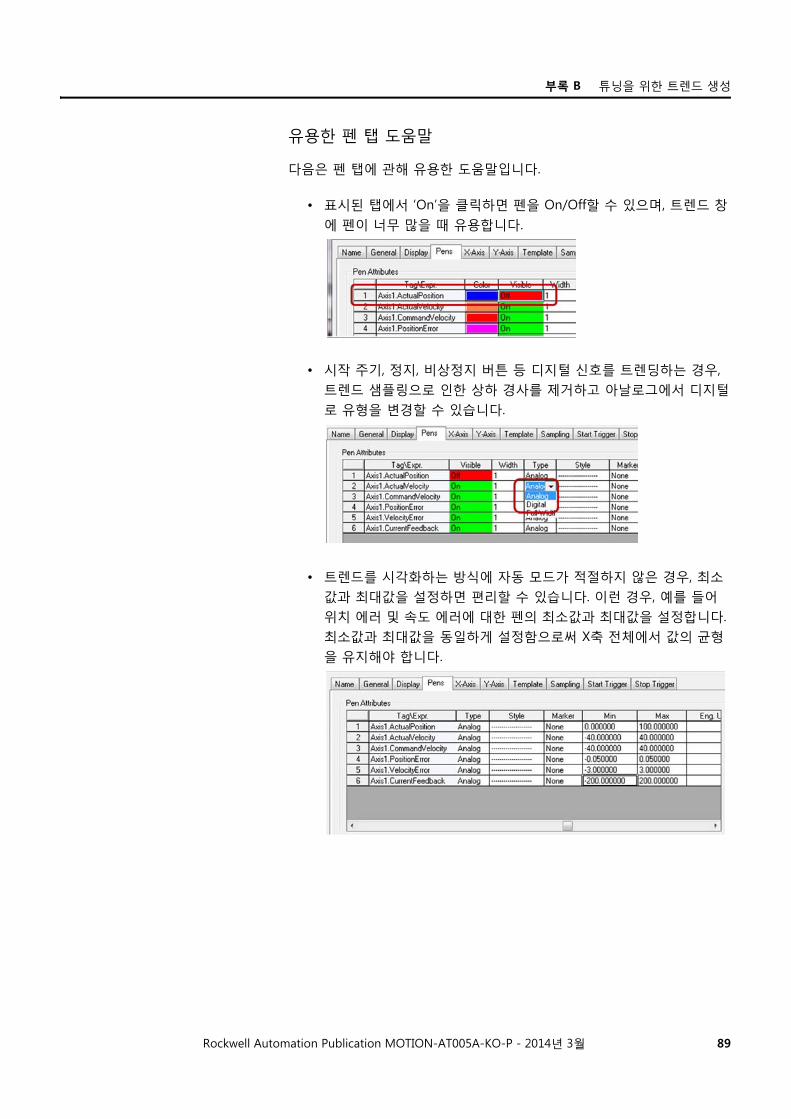
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 89
부록 B 튜닝을 위한 트렌드 생성
유용한 펜 탭 도움말
다음은 펜 탭에 관해 유용한 도움말입니다.
• 표시된 탭에서 ‘On’을 클릭하면 펜을 On/Off할 수 있으며, 트렌드 창
에 펜이 너무 많을 때 유용합니다.
• 시작 주기, 정지, 비상정지 버튼 등 디지털 신호를 트렌딩하는 경우,
트렌드 샘플링으로 인한 상하 경사를 제거하고 아날로그에서 디지털
로 유형을 변경할 수 있습니다.
• 트렌드를 시각화하는 방식에 자동 모드가 적절하지 않은 경우, 최소
값과 최대값을 설정하면 편리할 수 있습니다. 이런 경우, 예를 들어
위치 에러 및 속도 에러에 대한 펜의 최소값과 최대값을 설정합니다.
최소값과 최대값을 동일하게 설정함으로써 X축 전체에서 값의 균형
을 유지해야 합니다.
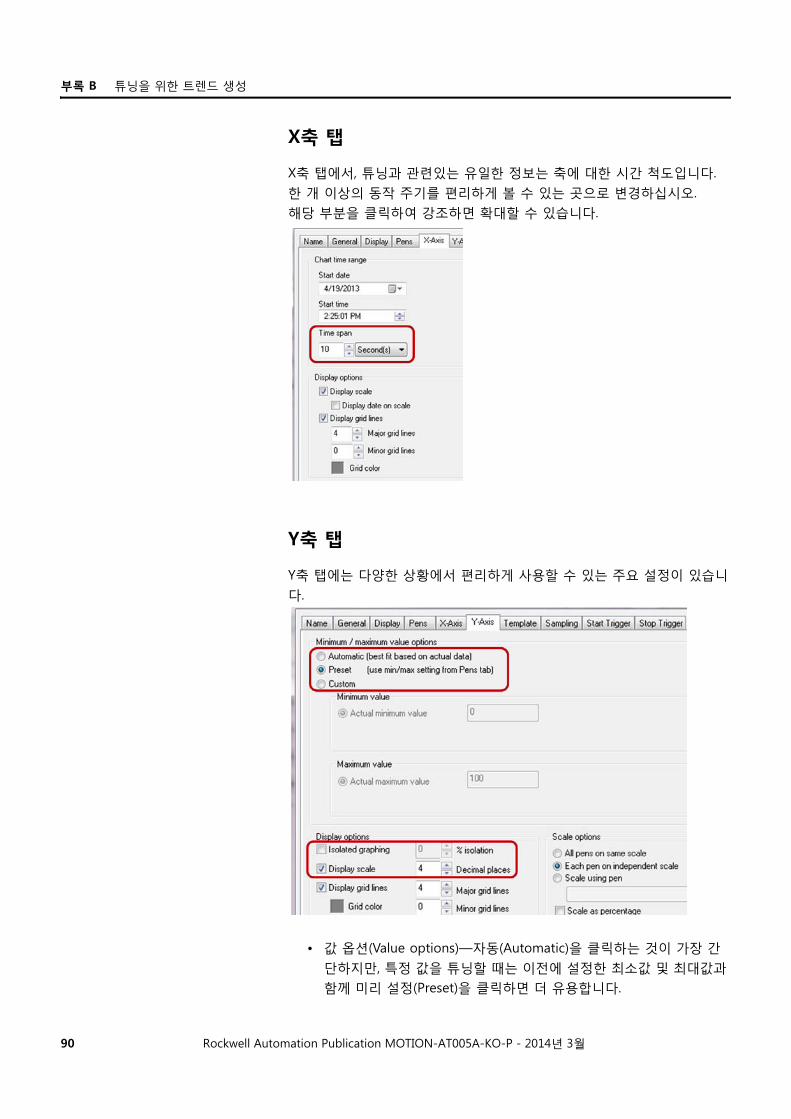
90 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
부록 B 튜닝을 위한 트렌드 생성
X축 탭
X축 탭에서, 튜닝과 관련있는 유일한 정보는 축에 대한 시간 척도입니다.
한 개 이상의 동작 주기를 편리하게 볼 수 있는 곳으로 변경하십시오.
해당 부분을 클릭하여 강조하면 확대할 수 있습니다.
Y축 탭
Y축 탭에는 다양한 상황에서 편리하게 사용할 수 있는 주요 설정이 있습니
다.
• 값 옵션(Value options)—자동(Automatic)을 클릭하는 것이 가장 간
단하지만, 특정 값을 튜닝할 때는 이전에 설정한 최소값 및 최대값과
함께 미리 설정(Preset)을 클릭하면 더 유용합니다.
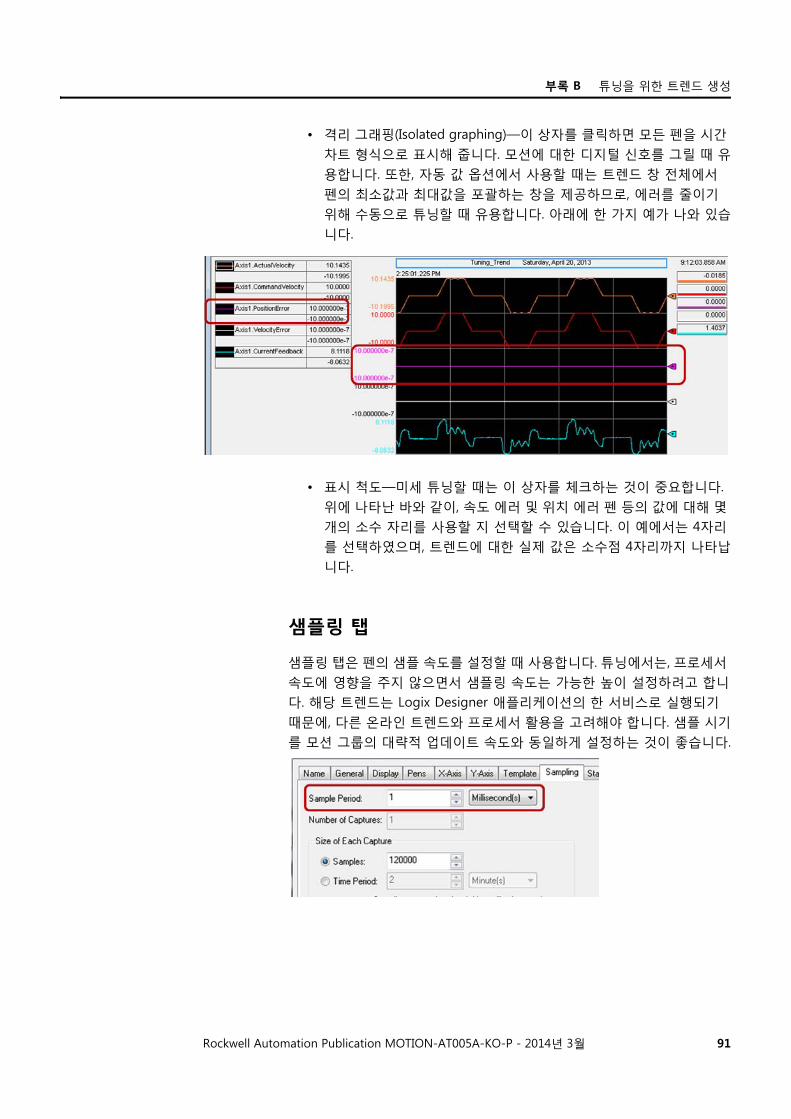
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 91
부록 B 튜닝을 위한 트렌드 생성
• 격리 그래핑(Isolated graphing)—이 상자를 클릭하면 모든 펜을 시간
차트 형식으로 표시해 줍니다. 모션에 대한 디지털 신호를 그릴 때 유
용합니다. 또한, 자동 값 옵션에서 사용할 때는 트렌드 창 전체에서
펜의 최소값과 최대값을 포괄하는 창을 제공하므로, 에러를 줄이기
위해 수동으로 튜닝할 때 유용합니다. 아래에 한 가지 예가 나와 있습
니다.
• 표시 척도—미세 튜닝할 때는 이 상자를 체크하는 것이 중요합니다.
위에 나타난 바와 같이, 속도 에러 및 위치 에러 펜 등의 값에 대해 몇
개의 소수 자리를 사용할 지 선택할 수 있습니다. 이 예에서는 4자리
를 선택하였으며, 트렌드에 대한 실제 값은 소수점 4자리까지 나타납
니다.
샘플링 탭
샘플링 탭은 펜의 샘플 속도를 설정할 때 사용합니다. 튜닝에서는, 프로세서
속도에 영향을 주지 않으면서 샘플링 속도는 가능한 높이 설정하려고 합니
다. 해당 트렌드는 Logix Designer 애플리케이션의 한 서비스로 실행되기
때문에, 다른 온라인 트렌드와 프로세서 활용을 고려해야 합니다. 샘플 시기
를 모션 그룹의 대략적 업데이트 속도와 동일하게 설정하는 것이 좋습니다.
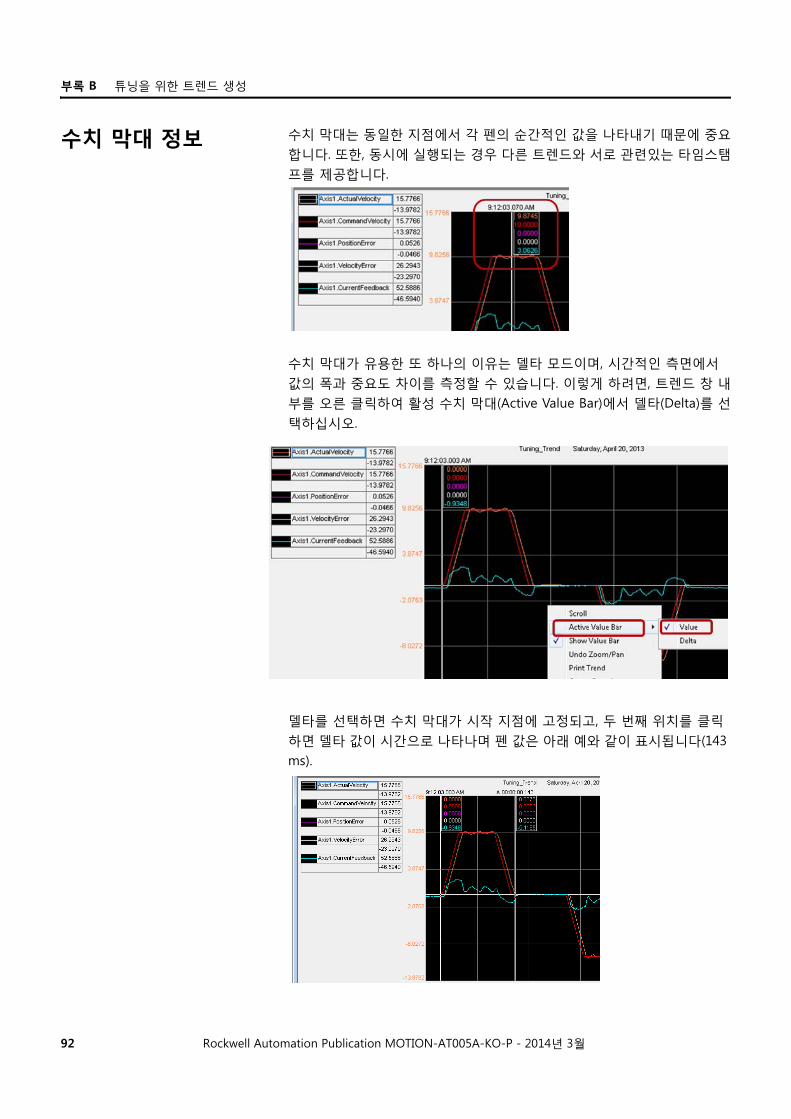
92 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
부록 B 튜닝을 위한 트렌드 생성
수치 막대 정보 수치 막대는 동일한 지점에서 각 펜의 순간적인 값을 나타내기 때문에 중요
합니다. 또한, 동시에 실행되는 경우 다른 트렌드와 서로 관련있는 타임스탬
프를 제공합니다.
수치 막대가 유용한 또 하나의 이유는 델타 모드이며, 시간적인 측면에서
값의 폭과 중요도 차이를 측정할 수 있습니다. 이렇게 하려면, 트렌드 창 내
부를 오른 클릭하여 활성 수치 막대(Active Value Bar)에서 델타(Delta)를 선
택하십시오.
델타를 선택하면 수치 막대가 시작 지점에 고정되고, 두 번째 위치를 클릭
하면 델타 값이 시간으로 나타나며 펜 값은 아래 예와 같이 표시됩니다(143
ms).
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 93
부록 B 튜닝을 위한 트렌드 생성
수치 막대를 지우고 기본 상태로 돌아오려면, 트렌드 창 내부를 오른 클릭
하여 활성 수치 막대(Active Value Bar)에서 델타(Delta)를 선택하십시오.
그런 다음 수치 막대를 다시 확인하십시오.

94 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
부록 B 튜닝을 위한 트렌드 생성
Notes:
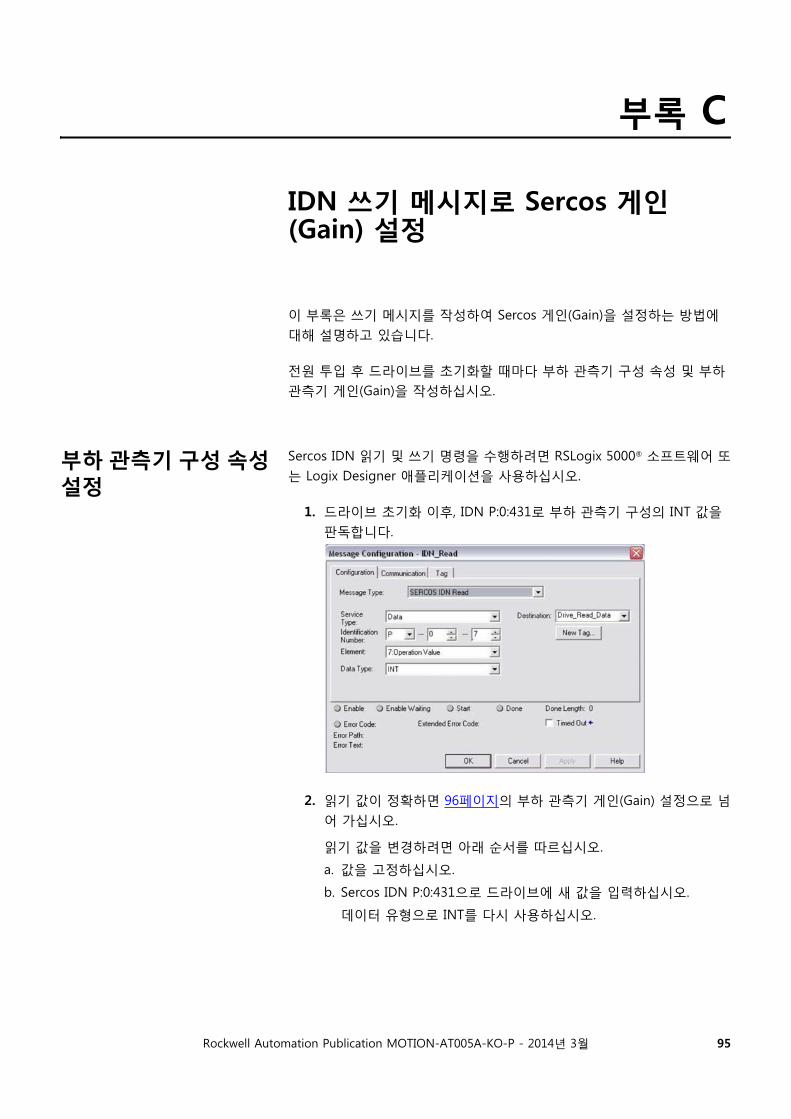
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 95
부록 C
IDN 쓰기 메시지로 Sercos 게인(Gain) 설정
이 부록은 쓰기 메시지를 작성하여 Sercos 게인(Gain)을 설정하는 방법에
대해 설명하고 있습니다.
전원 투입 후 드라이브를 초기화할 때마다 부하 관측기 구성 속성 및 부하
관측기 게인(Gain)을 작성하십시오.
부하 관측기 구성 속성 설정
Sercos IDN 읽기 및 쓰기 명령을 수행하려면 RSLogix 5000® 소프트웨어 또
는 Logix Designer 애플리케이션을 사용하십시오.
1. 드라이브 초기화 이후, IDN P:0:431로 부하 관측기 구성의 INT 값을
판독합니다.
2. 읽기 값이 정확하면 96페이지의 부하 관측기 게인(Gain) 설정으로 넘
어 가십시오.
읽기 값을 변경하려면 아래 순서를 따르십시오.
a. 값을 고정하십시오.
b. Sercos IDN P:0:431으로 드라이브에 새 값을 입력하십시오.
데이터 유형으로 INT를 다시 사용하십시오.
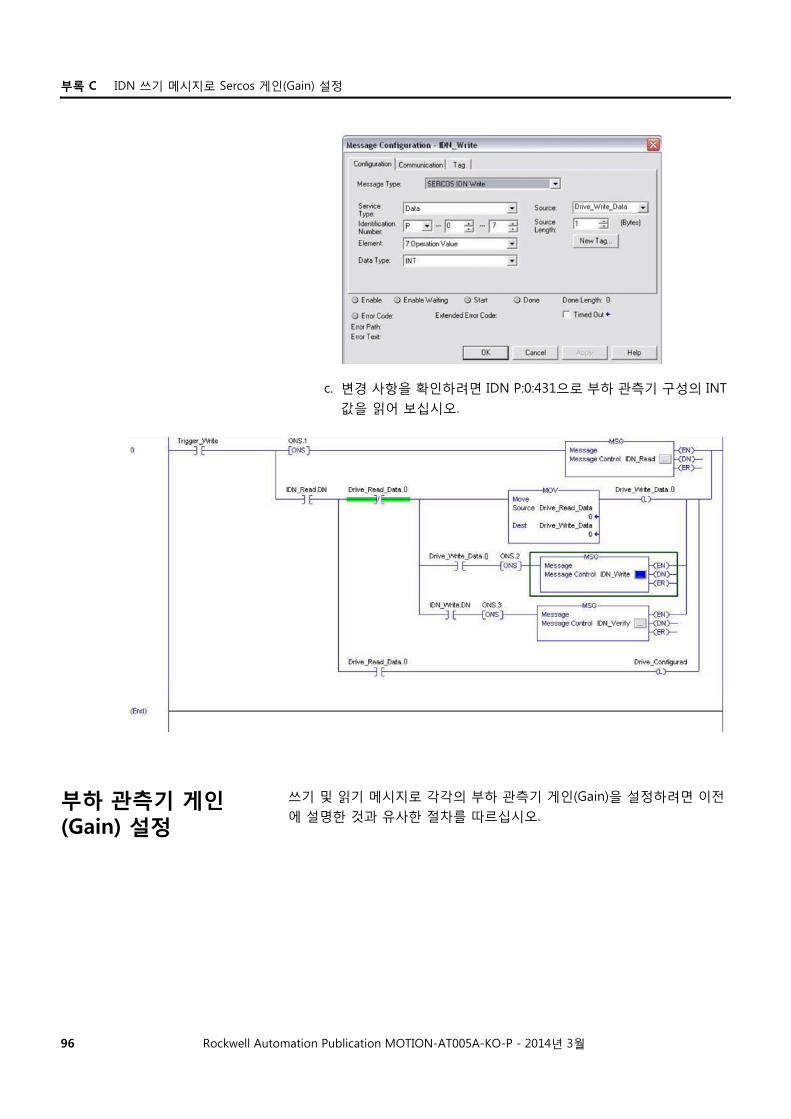
96 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
부록 C IDN 쓰기 메시지로 Sercos 게인(Gain) 설정
c. 변경 사항을 확인하려면 IDN P:0:431으로 부하 관측기 구성의 INT
값을 읽어 보십시오.
부하 관측기 게인(Gain) 설정
쓰기 및 읽기 메시지로 각각의 부하 관측기 게인(Gain)을 설정하려면 이전
에 설명한 것과 유사한 절차를 따르십시오.
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 97
부록 D
수직축 튜닝
Kinetix 드라이브는 오토 튜닝 기능을 사용해 억속 브레이크로 수직 축을 튜
닝할 수 있습니다.
고려사항 제공하는 툴을 이용하면 브레이크 제어가 어렵지 않습니다. 다음은 몇 가지
고려할 사항입니다.
• 억속 브레이크는 정지 브레이크가 아닙니다.
애플리케이션에서 이 브레이크로 부하를 정지하려고 하는 경우, 브레
이크가 맞물리지 않습니다. 단, 브레이크에서 높은 토크의 제로 속도
감지가 발생하는 경우, 브레이크가 장시간에 걸쳐 손상될 수 있습니
다. 정지력이 필요한 경우 억속 브레이크 외부의 축에 기계적 정지 및
/또는 재생 수단을 사용할 수 있습니다. 이는 모션 애널라이져 소프트
웨어를 사용해 모델링할 수 있습니다.
• 비상 정지 시 브레이크 드랍
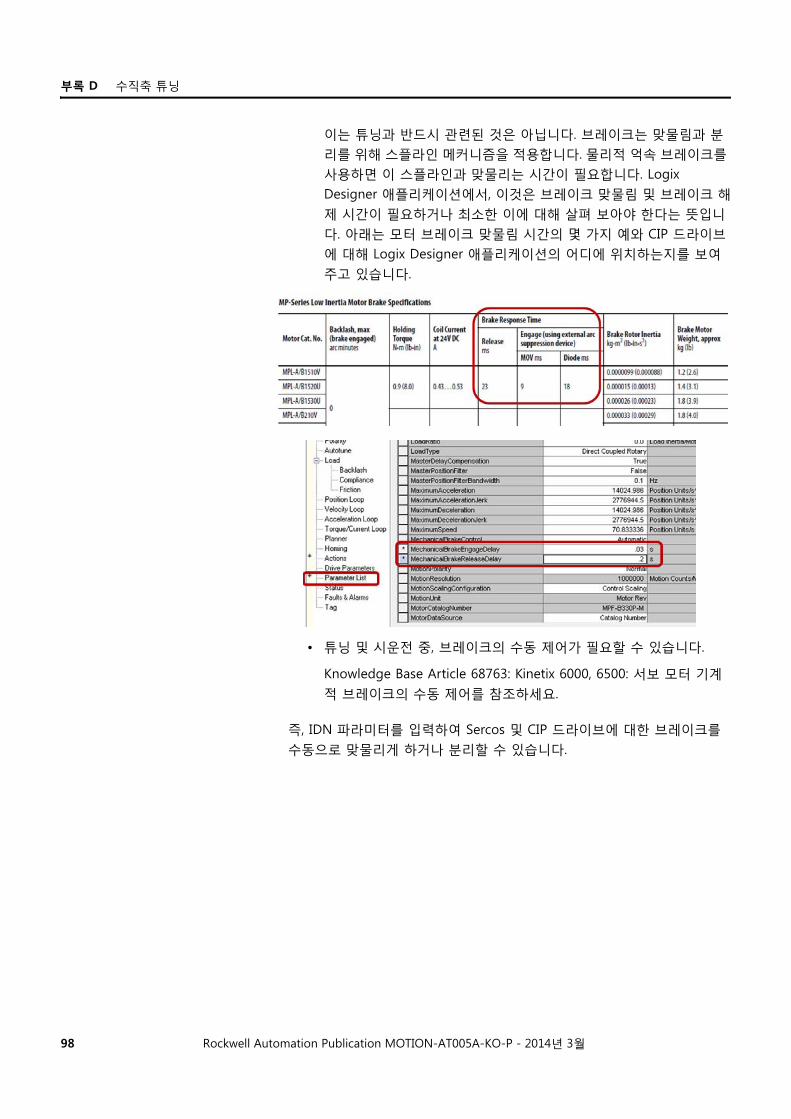
98 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
부록 D 수직축 튜닝
이는 튜닝과 반드시 관련된 것은 아닙니다. 브레이크는 맞물림과 분
리를 위해 스플라인 메커니즘을 적용합니다. 물리적 억속 브레이크를
사용하면 이 스플라인과 맞물리는 시간이 필요합니다. Logix
Designer 애플리케이션에서, 이것은 브레이크 맞물림 및 브레이크 해
제 시간이 필요하거나 최소한 이에 대해 살펴 보아야 한다는 뜻입니
다. 아래는 모터 브레이크 맞물림 시간의 몇 가지 예와 CIP 드라이브
에 대해 Logix Designer 애플리케이션의 어디에 위치하는지를 보여
주고 있습니다.
• 튜닝 및 시운전 중, 브레이크의 수동 제어가 필요할 수 있습니다.
Knowledge Base Article 68763: Kinetix 6000, 6500: 서보 모터 기계
적 브레이크의 수동 제어를 참조하세요.
즉, IDN 파라미터를 입력하여 Sercos 및 CIP 드라이브에 대한 브레이크를
수동으로 맞물리게 하거나 분리할 수 있습니다.
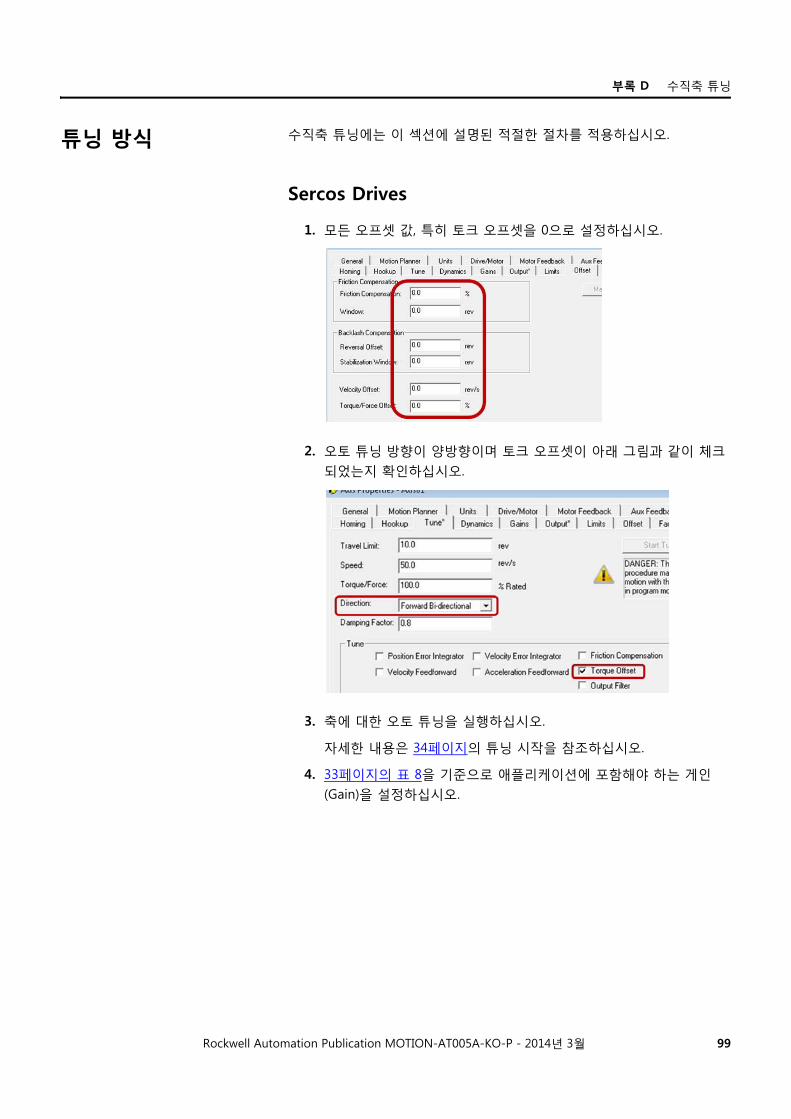
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 99
부록 D 수직축 튜닝
튜닝 방식 수직축 튜닝에는 이 섹션에 설명된 적절한 절차를 적용하십시오.
Sercos Drives
1. 모든 오프셋 값, 특히 토크 오프셋을 0으로 설정하십시오.
2. 오토 튜닝 방향이 양방향이며 토크 오프셋이 아래 그림과 같이 체크
되었는지 확인하십시오.
3. 축에 대한 오토 튜닝을 실행하십시오.
자세한 내용은 34페이지의 튜닝 시작을 참조하십시오.
4. 33페이지의 표 8을 기준으로 애플리케이션에 포함해야 하는 게인
(Gain)을 설정하십시오.
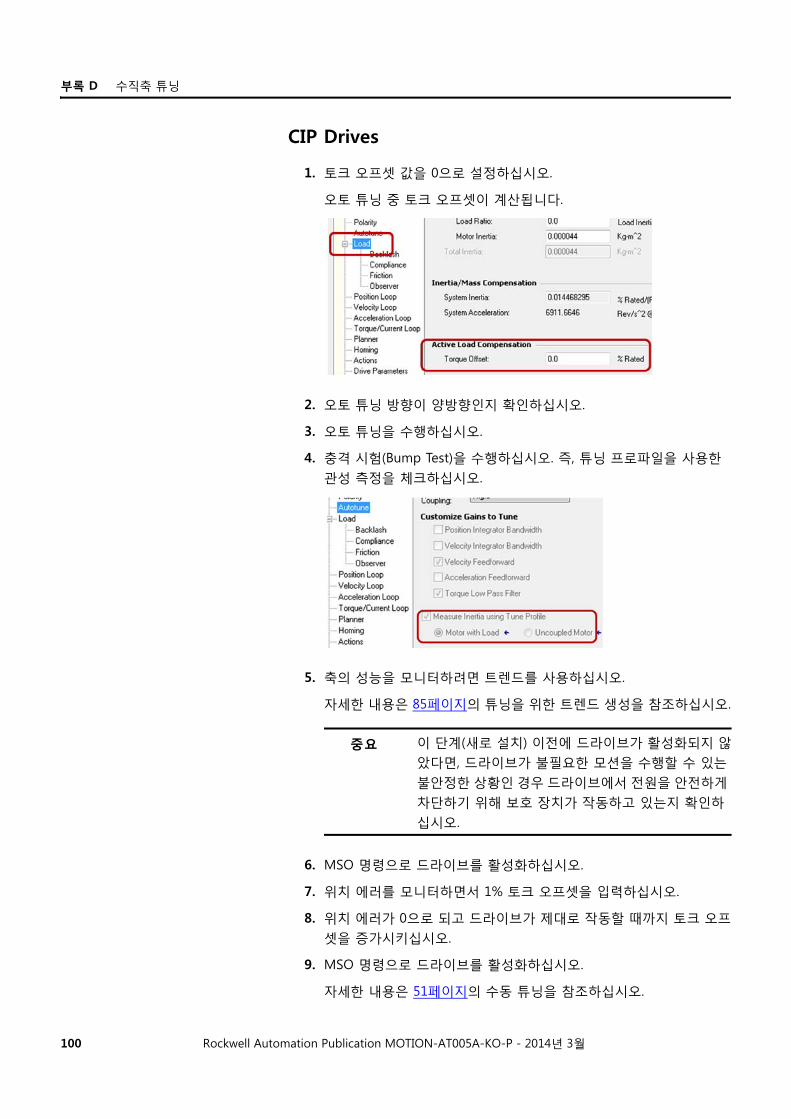
100 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
부록 D 수직축 튜닝
CIP Drives
1. 토크 오프셋 값을 0으로 설정하십시오.
오토 튜닝 중 토크 오프셋이 계산됩니다.
2. 오토 튜닝 방향이 양방향인지 확인하십시오.
3. 오토 튜닝을 수행하십시오.
4. 충격 시험(Bump Test)을 수행하십시오. 즉, 튜닝 프로파일을 사용한
관성 측정을 체크하십시오.
5. 축의 성능을 모니터하려면 트렌드를 사용하십시오.
자세한 내용은 85페이지의 튜닝을 위한 트렌드 생성을 참조하십시오.
6. MSO 명령으로 드라이브를 활성화하십시오.
7. 위치 에러를 모니터하면서 1% 토크 오프셋을 입력하십시오.
8. 위치 에러가 0으로 되고 드라이브가 제대로 작동할 때까지 토크 오프
셋을 증가시키십시오.
9. MSO 명령으로 드라이브를 활성화하십시오.
자세한 내용은 51페이지의 수동 튜닝을 참조하십시오.
중요 이 단계(새로 설치) 이전에 드라이브가 활성화되지 않
았다면, 드라이브가 불필요한 모션을 수행할 수 있는
불안정한 상황인 경우 드라이브에서 전원을 안전하게
차단하기 위해 보호 장치가 작동하고 있는지 확인하
십시오.
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 23
부록 A
구성도
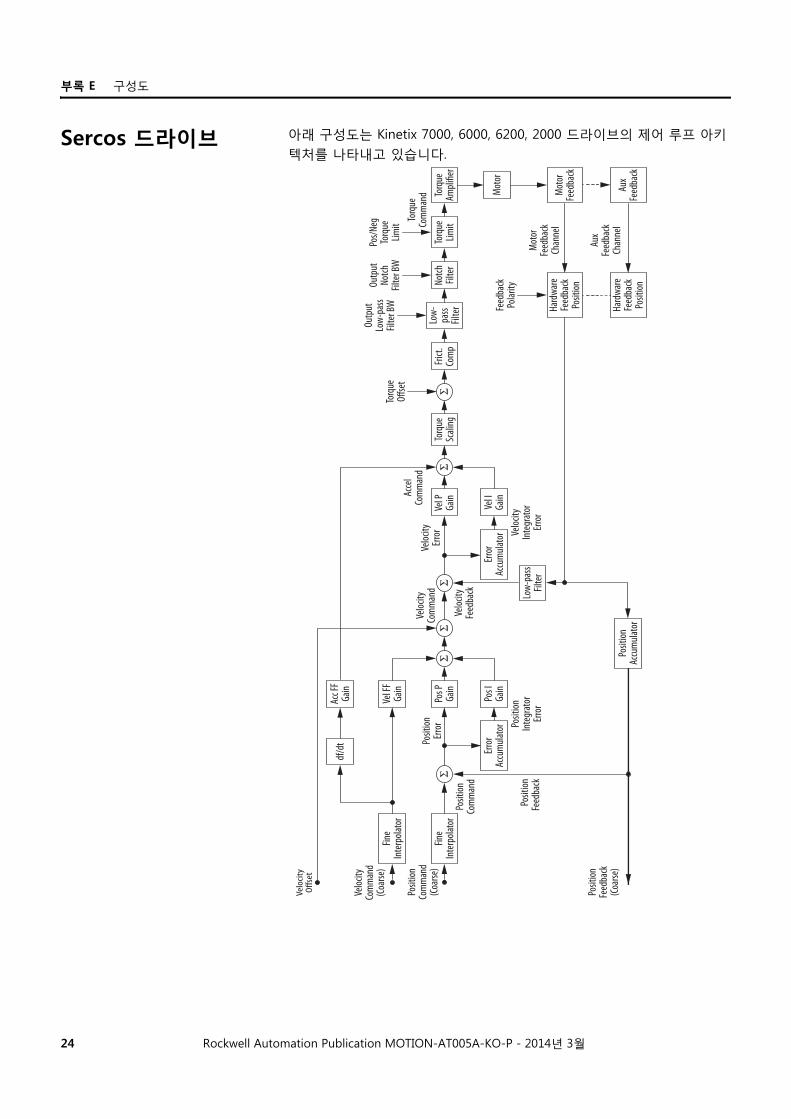
24 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
부록 E 구성도
Sercos 드라이브 아래 구성도는 Kinetix 7000, 6000, 6200, 2000 드라이브의 제어 루프 아키
텍처를 나타내고 있습니다.
Vel
oci
tyO
ffse
t
Velo
city
Com
man
d(C
oars
e)
Posi
tion
Com
man
d(C
oars
e)
Posi
tion
Feed
back
(Coa
rse)
Low
-pas
sFi
lter
Fine
Inte
rpol
ator
Posi
tion
Com
man
d
Posi
tion
Erro
r
Velo
city
Com
man
dVe
loci
tyEr
ror
Acce
lCo
mm
and
Har
dwar
eFe
edba
ckPo
sitio
n
Posi
tion
Feed
back
Posi
tion
Inte
grat
orEr
ror
Velo
city
Inte
grat
orEr
ror
Torq
ueO
ffse
t
ΣΣ
ΣΣ
Torq
ueSc
alin
gVe
loci
tyFe
edba
ck
Har
dwar
eFe
edba
ckPo
sitio
n
Feed
back
Pola
rity
Out
put
Low
-pas
sFi
lter B
W
Out
put
Not
chFi
lter B
W
Pos/
Neg
Torq
ueLi
mit
Low
-pa
ssFi
lter
Fine
Inte
rpol
ator
Pos P
Gain
Pos I
Gain
Vel P
Gain
Vel I
Gain
Fric
t.Co
mp
Mot
orFe
edba
ck
Mot
orFe
edba
ckCh
anne
l
Aux
Feed
back
Chan
nel
Aux
Feed
back
Torq
ueLi
mit
Torq
ueAm
plifi
er
Torq
ueCo
mm
and
Not
chFi
lter
Mot
orEr
ror
Accu
mul
ator
Posi
tion
Accu
mul
ator
Erro
rAc
cum
ulat
or
Vel F
FGa
in
Acc
FFGa
indf
/dt
ΣΣ
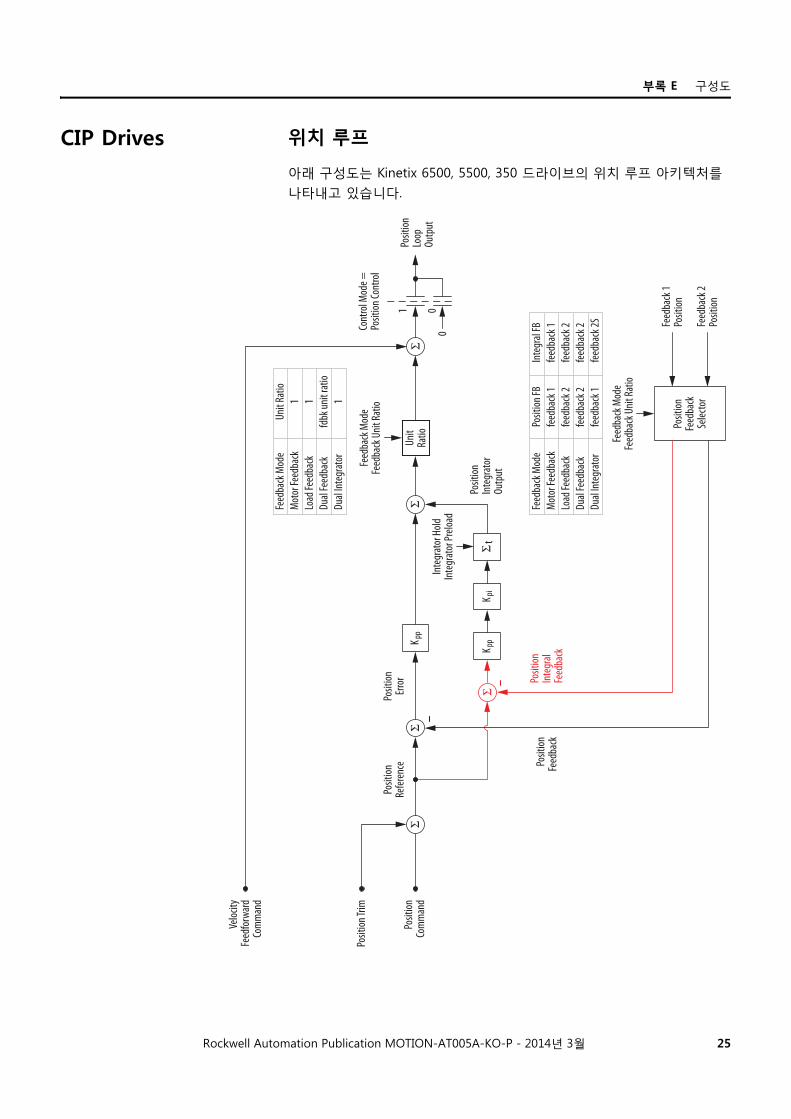
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 25
부록 E 구성도
CIP Drives 위치 루프
아래 구성도는 Kinetix 6500, 5500, 350 드라이브의 위치 루프 아키텍처를
나타내고 있습니다.
Posi
tion
Trim
Velo
city
Feed
forw
ard
Com
man
d
Posi
tion
Com
man
d
Posi
tion
Refe
renc
e Posi
tion
Feed
back
Posi
tion
Erro
r
Feed
back
Mod
eFe
edba
ck U
nit R
atio
Inte
grat
or H
old
Inte
grat
or P
relo
ad
Uni
tRa
tio
Cont
rol M
ode
=Po
sitio
n Co
ntro
l
Posi
tion
Loop
Out
put
1
0
ΣΣ
0
Posi
tion
Inte
grat
orO
utpu
t
Posi
tion
Inte
gral
Feed
back
Kpp
Kpp
Kpi
ΣΣ
tΣ
Σ
Posi
tion
Feed
back
Sele
ctor
Feed
back
1Po
sitio
n
Feed
back
2Po
sitio
n
Feed
back
Mod
eFe
edba
ck U
nit R
atio
Feed
back
Mod
e
Mot
or F
eedb
ack
Load
Fee
dbac
k
Dua
l Fee
dbac
k
Dua
l Int
egra
tor
Uni
t Rat
io
1 1
fdbk
uni
t rat
io
1
Feed
back
Mod
e
Mot
or F
eedb
ack
Load
Fee
dbac
k
Dua
l Fee
dbac
k
Dua
l Int
egra
tor
Posi
tion
FB
feed
back
1
feed
back
2
feed
back
2
feed
back
1
Inte
gral
FB
feed
back
1
feed
back
2
feed
back
2
feed
back
2S
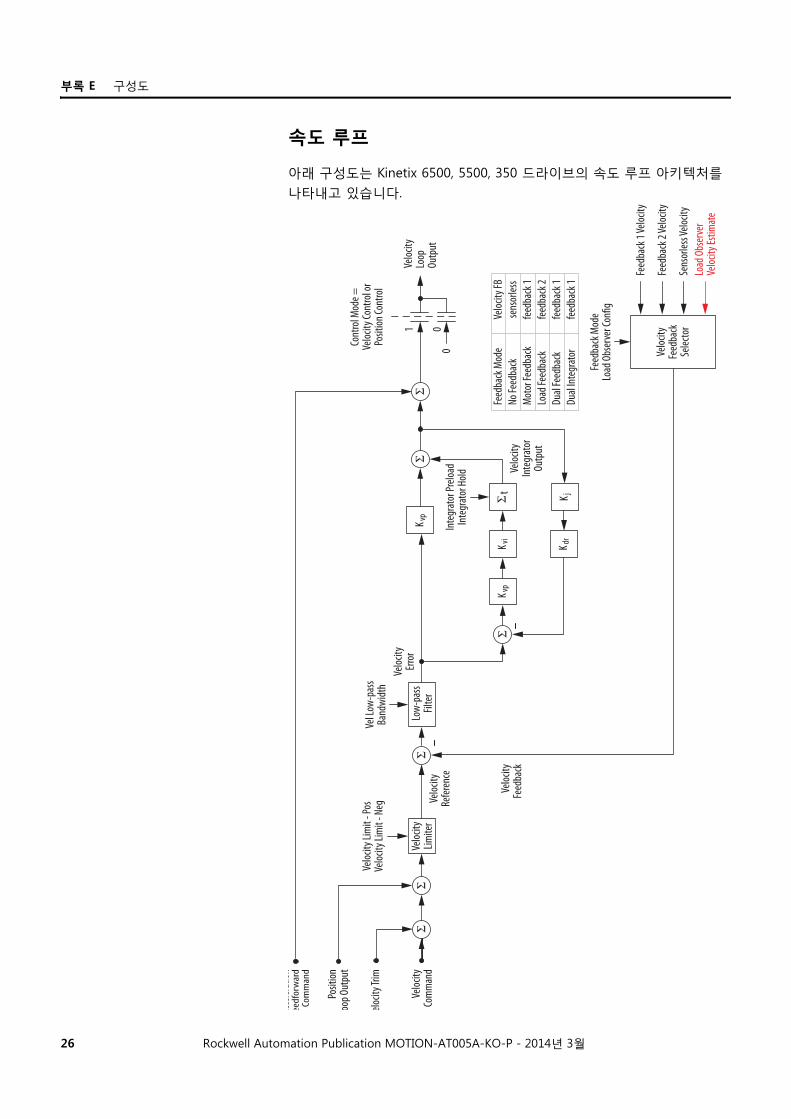
26 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
부록 E 구성도
속도 루프
아래 구성도는 Kinetix 6500, 5500, 350 드라이브의 속도 루프 아키텍처를
나타내고 있습니다.
eloc
ity
Trim
Acc
eler
atio
nee
dfo
rwar
dCo
mm
and
Posi
tion
oop
Out
put
Velo
city
Com
man
dVe
loci
tyLi
mite
rVe
loci
tyRe
fere
nce
Velo
city
Erro
r
Vel L
ow-p
ass
Band
wid
th
Velo
city
Feed
back
Velo
city
Feed
back
Sele
ctor
Feed
back
Mod
eLo
ad O
bser
ver C
onfig
Cont
rol M
ode
=Ve
loci
ty C
ontr
ol o
rPo
sitio
n Co
ntro
l
Velo
city
Loop
Out
put
1
0
ΣΣ
Σ
Σ
0
Low
-pas
sFi
lter
Load
Obs
erve
rVe
loci
ty E
stim
ate
Kvp
Kvp
Kdr
Kj
Kvi
tΣ
Velo
city
Inte
grat
orO
utpu
t
Inte
grat
or P
relo
adIn
tegr
ator
Hol
d
Feed
back
1 V
eloc
ity
Feed
back
2 V
eloc
ity
Sens
orle
ss V
eloc
ity
Velo
city
Lim
it - P
osVe
loci
ty L
imit
- Neg
Feed
back
Mod
e
No
Feed
back
Mot
or F
eedb
ack
Load
Fee
dbac
k
Dua
l Fee
dbac
k
Dua
l Int
egra
tor
Velo
city
FB
sens
orle
ss
feed
back
1
feed
back
2
feed
back
1
feed
back
1
ΣΣ
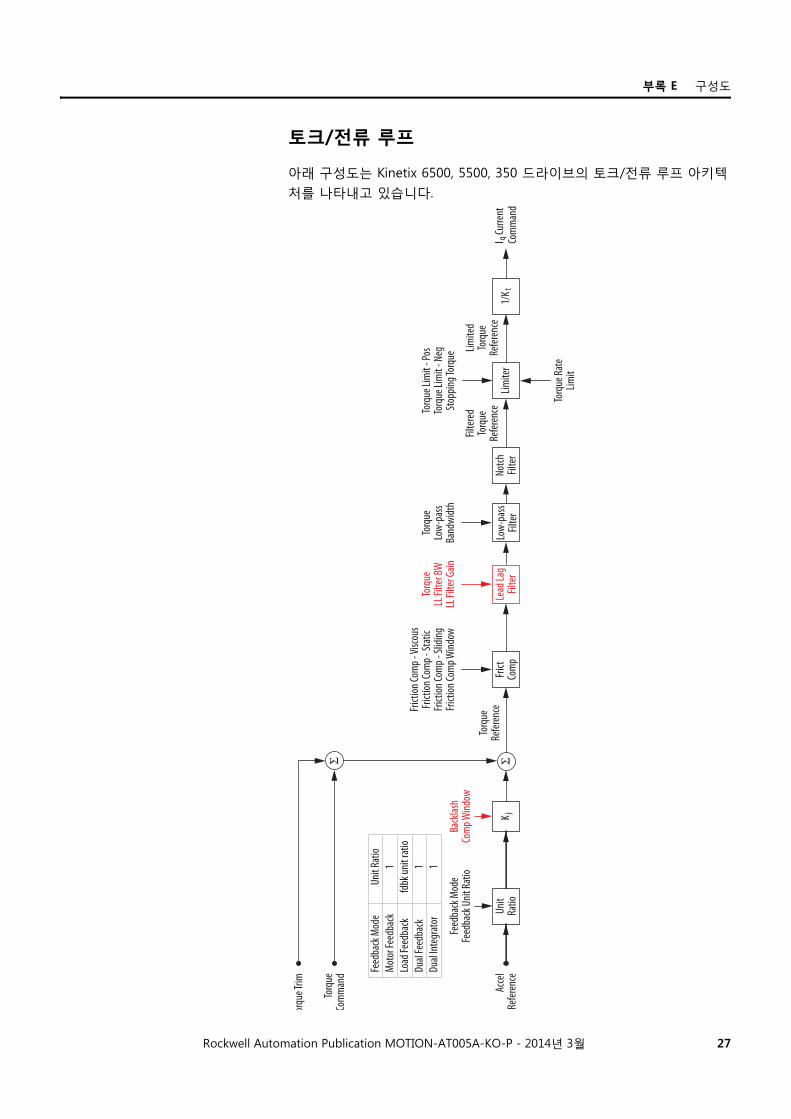
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 27
부록 E 구성도
토크/전류 루프
아래 구성도는 Kinetix 6500, 5500, 350 드라이브의 토크/전류 루프 아키텍
처를 나타내고 있습니다.
Acce
lRe
fere
nce
Torq
ueCo
mm
and
orqu
e Tr
im
Uni
tRa
tioFr
ict
Com
p
Torq
ueRe
fere
nce
Torq
ueLo
w-p
ass
Band
wid
th
Filte
red
Torq
ueRe
fere
nce
Low
-pas
sFi
lter
Not
chFi
lter
Torq
ue R
ate
Lim
it
Lim
ited
Torq
ueRe
fere
nce
Lim
iter
Fric
tion
Com
p - V
isco
usFr
ictio
n Co
mp
- Sta
ticFr
ictio
n Co
mp
- Slid
ing
Fric
tion
Com
p W
indo
w
Torq
ue L
imit
- Pos
Torq
ue L
imit
- Neg
Stop
ping
Torq
ue
Σ Σ
Back
lash
Com
p W
indo
w
Torq
ueLL
Filt
er B
WLL
Filt
er G
ain
Lead
Lag
Filte
r1/
Kt
Kj
Com
man
dCu
rren
tI q
Feed
back
Mod
eFe
edba
ck U
nit R
atio
Feed
back
Mod
e
Mot
or F
eedb
ack
Load
Fee
dbac
k
Dua
l Fee
dbac
k
Dua
l Int
egra
tor
Uni
t Rat
io
1
fdbk
uni
t rat
io
1 1

28 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
부록 E 구성도
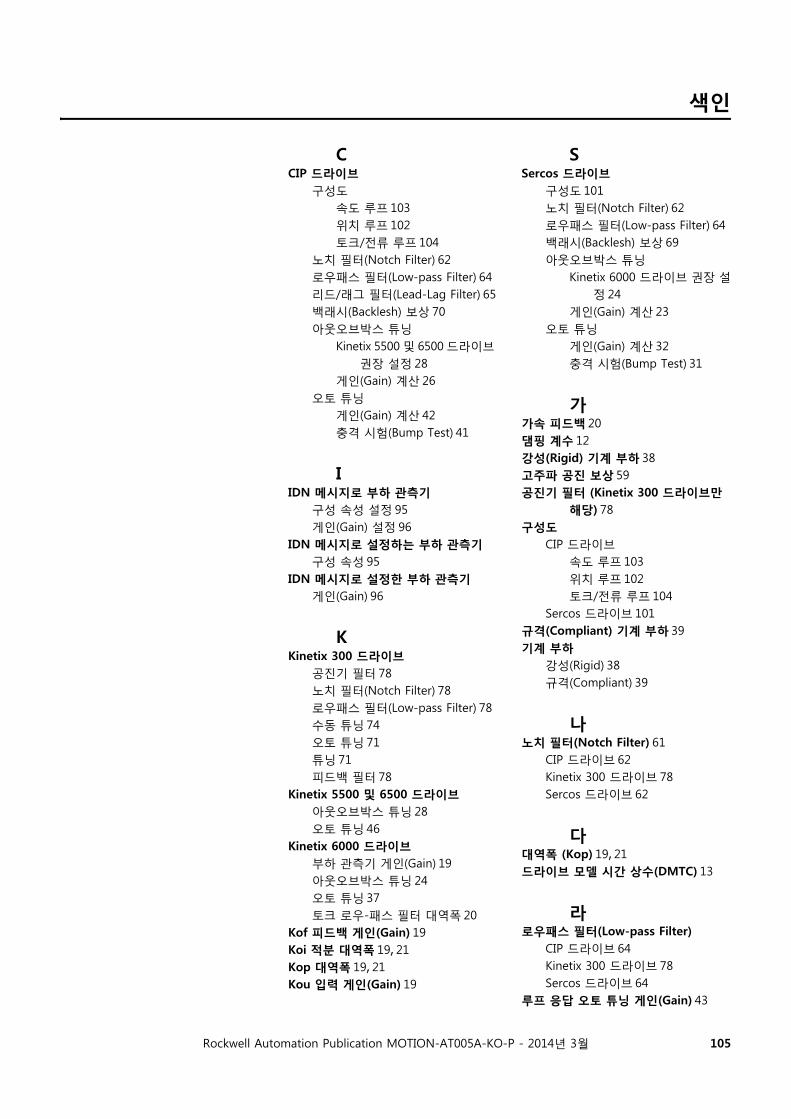
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 105
색인
CCIP 드라이브
구성도속도 루프 103위치 루프 102토크/전류 루프 104
노치 필터(Notch Filter) 62로우패스 필터(Low-pass Filter) 64리드/래그 필터(Lead-Lag Filter) 65백래시(Backlesh) 보상 70아웃오브박스 튜닝
Kinetix 5500 및 6500 드라이브 권장 설정 28
게인(Gain) 계산 26오토 튜닝
게인(Gain) 계산 42충격 시험(Bump Test) 41
IIDN 메시지로 부하 관측기
구성 속성 설정 95게인(Gain) 설정 96
IDN 메시지로 설정하는 부하 관측기구성 속성 95
IDN 메시지로 설정한 부하 관측기게인(Gain) 96
KKinetix 300 드라이브
공진기 필터 78노치 필터(Notch Filter) 78로우패스 필터(Low-pass Filter) 78수동 튜닝 74오토 튜닝 71튜닝 71피드백 필터 78
Kinetix 5500 및 6500 드라이브아웃오브박스 튜닝 28오토 튜닝 46
Kinetix 6000 드라이브부하 관측기 게인(Gain) 19아웃오브박스 튜닝 24오토 튜닝 37토크 로우-패스 필터 대역폭 20
Kof 피드백 게인(Gain) 19Koi 적분 대역폭 19, 21Kop 대역폭 19, 21Kou 입력 게인(Gain) 19
SSercos 드라이브
구성도 101노치 필터(Notch Filter) 62로우패스 필터(Low-pass Filter) 64백래시(Backlesh) 보상 69아웃오브박스 튜닝
Kinetix 6000 드라이브 권장 설정 24
게인(Gain) 계산 23오토 튜닝
게인(Gain) 계산 32충격 시험(Bump Test) 31
가가속 피드백 20댐핑 계수 12강성(Rigid) 기계 부하 38고주파 공진 보상 59공진기 필터 (Kinetix 300 드라이브만
해당) 78구성도
CIP 드라이브속도 루프 103위치 루프 102토크/전류 루프 104
Sercos 드라이브 101규격(Compliant) 기계 부하 39기계 부하
강성(Rigid) 38규격(Compliant) 39
나노치 필터(Notch Filter) 61
CIP 드라이브 62Kinetix 300 드라이브 78Sercos 드라이브 62
다대역폭 (Kop) 19, 21드라이브 모델 시간 상수(DMTC) 13
라로우패스 필터(Low-pass Filter)
CIP 드라이브 64Kinetix 300 드라이브 78Sercos 드라이브 64
루프 응답 오토 튜닝 게인(Gain) 43
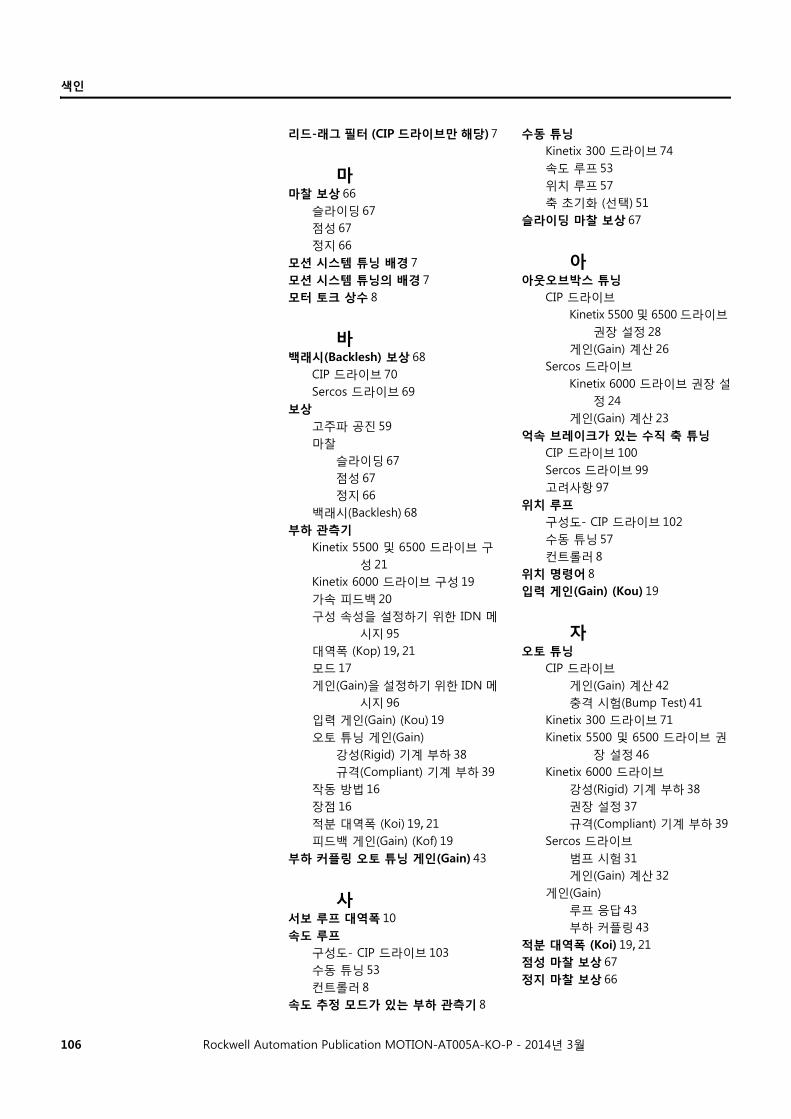
106 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
색인
리드-래그 필터 (CIP 드라이브만 해당) 7
마마찰 보상 66
슬라이딩 67점성 67정지 66
모션 시스템 튜닝 배경 7모션 시스템 튜닝의 배경 7모터 토크 상수 8
바백래시(Backlesh) 보상 68
CIP 드라이브 70Sercos 드라이브 69
보상고주파 공진 59마찰
슬라이딩 67점성 67정지 66
백래시(Backlesh) 68부하 관측기
Kinetix 5500 및 6500 드라이브 구성 21
Kinetix 6000 드라이브 구성 19가속 피드백 20구성 속성을 설정하기 위한 IDN 메
시지 95대역폭 (Kop) 19, 21모드 17게인(Gain)을 설정하기 위한 IDN 메
시지 96입력 게인(Gain) (Kou) 19오토 튜닝 게인(Gain)
강성(Rigid) 기계 부하 38규격(Compliant) 기계 부하 39
작동 방법 16장점 16적분 대역폭 (Koi) 19, 21피드백 게인(Gain) (Kof) 19
부하 커플링 오토 튜닝 게인(Gain) 43
사서보 루프 대역폭 10속도 루프
구성도- CIP 드라이브 103수동 튜닝 53컨트롤러 8
속도 추정 모드가 있는 부하 관측기 8
수동 튜닝Kinetix 300 드라이브 74속도 루프 53위치 루프 57축 초기화 (선택) 51
슬라이딩 마찰 보상 67
아아웃오브박스 튜닝
CIP 드라이브Kinetix 5500 및 6500 드라이브
권장 설정 28게인(Gain) 계산 26
Sercos 드라이브Kinetix 6000 드라이브 권장 설
정 24게인(Gain) 계산 23
억속 브레이크가 있는 수직 축 튜닝CIP 드라이브 100Sercos 드라이브 99고려사항 97
위치 루프구성도- CIP 드라이브 102수동 튜닝 57컨트롤러 8
위치 명령어 8입력 게인(Gain) (Kou) 19
자오토 튜닝
CIP 드라이브게인(Gain) 계산 42충격 시험(Bump Test) 41
Kinetix 300 드라이브 71Kinetix 5500 및 6500 드라이브 권
장 설정 46Kinetix 6000 드라이브
강성(Rigid) 기계 부하 38권장 설정 37규격(Compliant) 기계 부하 39
Sercos 드라이브범프 시험 31게인(Gain) 계산 32
게인(Gain)루프 응답 43부하 커플링 43
적분 대역폭 (Koi) 19, 21점성 마찰 보상 67정지 마찰 보상 66
Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월 107
색인
차축 초기화 (선택 - 수동 튜닝) 51
타토크 스칼라(Scalar) 8, 14토크/전류 루프 구성도 - CIP 드라이브
104토크를 시스템에 맞게 조정 14튜닝
Kinetix 300 드라이브 71억속 브레이크가 있는 수직 축
CIP 드라이브 100Sercos 드라이브 99고려사항 97
튜닝 배경 7튜닝을 위한 수치 막대 트렌드 정보 92튜닝을 위한 이동 프로파일
예 1 81예 2 83예 3 84
튜닝을 위한 이동 프로파일 생성예 1 81예 2 83예 3 84
튜닝을 위한 트렌드 (트렌드 속성 대화 상자를 이용해 생성)
X축 탭 90Y축 탭 90샘플링 탭 91수치 막대 정보 92이름 탭 85일반 탭 85펜 탭 86표시 탭 86
튜닝을 위한 트렌드 생성수치 막대 정보 92트렌드 속성 대화 상자
X축 탭 90Y축 탭 90샘플링 탭 91이름 탭 85일반 탭 85펜 탭 86표시 탭 86
튜닝을 위한 트렌드 정보 및 수치 막대 92
튜닝을 위한 트렌드를 생성하는 X축 탭 90
튜닝을 위한 트렌드를 생성하는 Y축 탭 90
튜닝을 위한 트렌드를 생성하는 샘플링 탭 91
튜닝을 위한 트렌드를 생성하는 이름 탭 85
튜닝을 위한 트렌드를 생성하는 일반 탭 85
튜닝을 위한 트렌드를 생성하는 트렌드 속성 대화 상자
X축 탭 90Y축 탭 90샘플링 탭 91수치 막대 정보 92이름 탭 85펜 탭 86표시 탭 86
튜닝을 위한 트렌드를 생성하는 트렌드 특성 대화 상자
일반 탭 85튜닝을 위한 트렌드를 생성하는 펜 탭
CIP 드라이브 트렌딩 87Sercos 드라이브 트렌딩 86유용한 펜 탭 도움말 89
튜닝을 위한 트렌드를 생성하는 표시 탭 86
파피드백 게인(Gain) (Kof) 19피드백 필터 (Kinetix 300 드라이브만
해당) 78피드포워드 명령어 8필터
Kinetix 300 드라이브공진기 78노치 78로우패스 78피드백 78
노치 61CIP 드라이브 62Sercos 드라이브 62
로우패스CIP 드라이브 64Sercos 드라이브 64
리드/래그 (CIP 드라이브만 해당) 65
필터 및 보상 59

108 Rockwell Automation Publication MOTION-AT005A-KO-P - 2014년 3월
색인

Publication MOTION-AT005A-KO-P - 2014년 3월 Copyright © 2014 Rockwell Automation, Inc. All rights reserved.
로크웰 오토메이션 지원
로크웰 오토메이션은 고객의 제품 사용을 지원하기 위해 웹 상에 기술 정보를 제공하고 있습니다.
http://www.rockwellautomation.com/support에서는 기술 및 어플리케이션 참고 자료, 샘플 코드, 소프트웨어 서
비스 팩 링크를 보실 수 있습니다. 소프트웨어 업데이트, 지원 상담 및 포럼, 기술 정보, FAQ, 제품 알림 업데이트
등록을 원하시면 https://rockwellautomation.custhelp.com/의 지원 센터를 방문하실 수도 있습니다.
또한, 설치, 구성, 문제 해결에 대한 여러 가지 지원 프로그램이 마련되어 있습니다. 자세한 정보를 원하시면 지역
판매점 또는 로크웰 오토메이션 대리점으로 연락하거나 http://www.rockwellautomation.com/services/online-
phone의 지원 센터를 방문하실 수도 있습니다.
설치 지원
제품 설치 후 최초 24시간 내에 문제가 발생하는 경우, 이 매뉴얼의 내용을 다시 읽어 주십시오. 제품 작동을 위한
초기 지원을 원하시면 소비자 지원팀으로 문의해 주십시오.
신제품 간편 반환
로크웰 오토메이션은 제품의 공장 출하 시 모든 제품을 시험하여 제대로 작동하는지 확인합니다. 단, 구매하신 제
품이 작동하지 않아 반환해야 하는 경우, 아래 절차를 따라 주십시오.
문서 피드백
귀하의 의견은 고객의 필요에 맞는 문서를 제공하는 데 도움이 됩니다. 문서 개선에 대한 의견이 있으시면
http://www.rockwellautomation.com/literature/에 있는 문서 번호 RA-DU002 양식을 기재해 주십시오.
미국 또는 캐나다 1.440.646.3434
그 외 국가 http://www.rockwellautomation.com/rockwellautomation/support/overview.page에서 Worldwide
Locator를 사용하거나, 해당 지역의 로크웰 오토메이션 대리점으로 연락하십시오.
미국 판매점으로 연락하십시오. 제품을 반환하려면 판매점에 소비자 지원 케이스 번호 (번호를 받으려면 위 전
화 번호로 전화하세요)를 제시해야 합니다.
그 외 국가 해당 지역 로크웰 오토메이션 대리점으로 반환 절차를 문의해 주십시오.