-
8/3/2019 eBug - An Open Robotics Platform for Teaching and
Research
1/9
eBug - An Open Robotics Platform for Teaching and Research
Nicholas DAdemo Wen Lik Dennis Lui Wai Ho Li
Y. Ahmet Sekercioglu Tom
Drummond{nick.dademo|dennis.lui|wai.ho.li|ahmet.sekercioglu|tom.drummond}@monash.edu
Monash University, Australia
Abstract
The eBug is a low-cost and open robotics plat-form designed for
undergraduate teaching andacademic research in areas such as
multime-dia smart sensor networks, distributed control,
mobile wireless communication algorithms andswarm robotics. The
platform is easy to use,modular and extensible. Thus far, it has
beenused in a variety of applications, including aneight-hour
demonstration managed by under-graduates at the Monash University
Open Day.This paper describes both the eBug hardwareand software
which is in the process of beingopen-sourced online. The paper also
highlightsseveral research applications of the eBug, in-cluding its
use in a wireless control testbed andas the eyeBug; an eBug that
senses the worldin real-time using the Microsoft Kinect.
1 Introduction
The eBug was first conceived in 2008 as a platform toinvolve
undergraduates in a research project on wirelesscontrol of multiple
robots. Since then, the eBug hasundergone several iterations,
resulting in an extensibleplatform that has been used in a variety
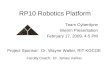
of research ap-plications as detailed in Section 3. The latest
versionis shown in Figure 1 which highlights the different lay-ers
of the eBug. The design is modular, modifiable andextensible in
that it allows layers to be both replacedor added depending on the
required application. TheeBug is intended to be used in several
research projectsin the near future which are detailed alongside
relevantreferences in Section 4. The hardware design and soft-ware
sources are available online at the Monash WirelessSensor and Robot
Networks Laboratory Website1.
1http://wsrnlab.ecse.monash.edu.au/
Figure 1: e-Bug exploded view
-
8/3/2019 eBug - An Open Robotics Platform for Teaching and
Research
2/9
Table 1: Comparison of similar-sized robotic platformsCost Open
Platform
eBug US $500 YesEPFL e-puck US $11901 NoK-Team K-Junior US
$11062 NoK-Team Khepera III US $42702 No
Robomote US $150
3
Yes
1.1 Similar Platforms
When compared with several other robotic platforms ofsimilar
size and capabilities (Table 1), the eBug differen-tiates itself by
firstly being a completely open platform.Here, open refers to the
complete design (both hard-ware and software) being available
online1 to the publicfor both improvement as well as customization.
Further-more, the relatively simple chassis design constructed
ofcommonly available parts and materials allows the eBugto be
replicated much more easily than other robotic
platforms. Thus, the eBug is suited to be constructedin-house by
students as a learning experience at educa-tional institutions
wishing to utilize the robot. For thisreason, the cost shown for
the eBug in Table 1 excludeslabour. By way of example, the first
author (a finalyear electrical engineering undergraduate at the
time ofwriting) was able to construct an eBug in approximately12
hours. This included the soldering of components onboth the logic
and power layers as well as the construc-tion of the mechanical
layer.
Out of the platforms listed in Table 1, the Robomote3
first produced by the University of Southern Californiain 2002
is the most similar to the eBug in terms of costand availability of
design files. One main difference isthat the eBug uses more modern
hardware. It also hasthe following advantages:
More advanced communications ca-pabilities (2.4 GHz 250 Kbps
XBee vs. 916.5 MHz19.2 Kbps OOK).
Designed to traverse a variety of surfaces, includingcarpet.
Features on-board lithium-polymer battery chargerand
supervisor/management circuitry.
Able to carry additional sensors/peripherals (i.e.
expandable).
1.2 Previous eBug Designs
Since 2008, the eBug has undergone several major
designiterations (Figure 2):
Design 1: (2008) Used DC motors and Ni-MH bat-teries.
2http://www.roadnarrows.com/ [23rd Aug
2011]3http://robotics.usc.edu/~robomote/ [4th Sep 2011]
Figure 2: Early eBug designs produced between 2008and 2009 (left
to right: designs 1-3)
Design 2: (2008) Produced in parallel to Design1. Featured IR
sensors for communication and im-proved wireless capabilities.
Design 3: (2009) Merger of first two designs withvarious
improvements.
Design 4: (2010-) Near-complete redesign. In-creased number of
features. Improved, more effi-cient, LiPo-based power supply
(Figure 1).
2 Design
As shown in Figure 1, the eBug features a modular de-sign which
separates the robot into distinct layers (frombottom to top):
Mechanical, Power, Logic, and Expan-sion Board. A modular design
such as this has the fol-lowing advantages:
If any modifications or improvements need to bemade to the Power
Layer for example, the LogicLayer does not also need to be changed
or re-designed - that is, the Logic Layer does not carehow the
Power Layer is implemented but only caresthat power is provided
appropriately.
Debugging is simplified by the separation of thepower and logic
sections of the eBug. For example,known-good layers can easily be
swapped betweenrobots, thus greatly speeding up the debugging
pro-cess.
In the case of hardware damage/faults, repair time
is reduced due to the fact that only the faulty layer(as opposed
to the entire unit) needs to be replaced.
If the eBug Logic board is not suitable for a par-ticular
application, a custom board with a similarshape can instead be used
by appropriately inter-facing with the Power Layer.
Additional layers can be created and added to theeBug to provide
extra functionality (see Section3.2).
-
8/3/2019 eBug - An Open Robotics Platform for Teaching and
Research
3/9
Figure 3: 25 eBug robots in various stages of assembly
2.1 Overview
The following are the major design goals set out prior tothe
design of the eBug and the corresponding results:
Long battery life for long-duration experi-ments: The eBug has
an approximate running timeof 3 hrs during heavy use in a typical
applicationsuch as described in Section 3.1. It also has a 14-hr
idle running time (using a 2500 mAh 3-cell LiPobattery).
Ability to travel on various surfaces: Due tothe use of hard
rubber wheels with small ground-contact area, the eBug is able to
travel on a varietyof surfaces.
Ability to carry extra weight of additionalexpansion layers: The
eBug is able to carry addi-tional weight while still retaining
mobility. Section3.2 details an example of a Microsoft Kinect
(ap-proximately 500 g) mounted on an eBug.
2.2 Hardware
Microcontroller
The eBug utilizes the Atmel AVR XMEGA 8/16-bit mi-crocontroller
which is capable of up to 32 MIPS at 3.3 V.Note that the XMEGA
100-pin variants, as used in the
eBug, are all pin-to-pin compatible. Several reasons forchoosing
this particular microcontroller include:
The XMEGA offers high-performance (typically1 MIPS/MHz).
Features a range of useful peripherals (e.g. DMA,Event System,
12-bit ADC/DAC, on-board USBcontroller) not usually found on
typical 8/16-bit mi-crocontrollers such as the AVR MEGA series
(asused in the popular Arduino platform).
Low power consumption - the XMEGA has a max-imum current draw of
only 20 mA.
As will be discussed later in this paper, the eBughas not been
designed to carry out complex, CPU-intensive tasks. Thus, a
higher-performance mi-crocontroller (i.e. 32-bit ARM Cortex-M
series) isnot required and would unnecessarily increase power
consumption. Open-source software development tools for the
Atmel AVR series of microcontrollers are freely-available (e.g.
WinAVR). Furthermore, Atmel alsoprovides a free Integrated
Development Environ-ment software package (AVR Studio).
Power
As shown in Figure 4, the eBug is powered by a 3-cell (11.1 V)
lithium-polymer battery and also featuresan on-board battery
charging circuit which allows therobot to be charged with an
external DC power adap-
tor. Furthermore, protection circuits constantly monitorthe
lithium-polymer pack to
Measure and maintain an accurate record of avail-able charge
which can also be displayed visually bya set of five on-board
LEDs.
Provide protection against the following events:
Cell over and under-voltage
Charge and discharge over-current
Charge and discharge over-temperature
Short-circuit
The majority of the on-board peripherals operate at sup-
ply voltages of 5 V and 3.3 V which are provided by abuck
switching regulator and an LDO regulator respec-tively. The eBug
can also be completely powered by anexternal DC power adaptor
allowing long periods of useduring development and debugging.
Another feature ofthis design is that the unregulated battery
supply voltagecan also be directly accessed at the Logic Layer.
This isuseful for add-on boards which may require a higher sup-ply
voltage or an unregulated supply (e.g. DC motors,actuators).
Communication
Wireless communication capabilities are provided by alow-cost,
low-power Digi XBee RF module operatingwithin the ISM 2.4 GHz
frequency band. The mod-ule has a maximum indoor range of
approximately 40 m(line-of-sight) at a transmit power of 2 mW with
currentconsumption ranging from 15 mA to 40 mA dependingon whether
the device is in the idle or transmit/receivestate. The module
features two modes of operation:
Transparent Operation: Module acts as a serial
linereplacement.
-
8/3/2019 eBug - An Open Robotics Platform for Teaching and
Research
4/9
Figure 4: eBug Power Supply Design
Figure 5: Simplified diagram showing the connections ofthe major
eBug peripherals to the AVR XMEGA
API Operation: Allows the full functionality of themodule to be
used (e.g. ZigBee addressing sup-port, remote configuration, remote
I/O pin sam-pling, mesh networking).
The eBug utilizes the XBee module in the API modeof operation in
order to allow the use of the above-mentioned advanced features.
API mode also offers thehigher performance of the two modes - a
maximum data
throughput of 35 Kbps. Furthermore, the XBee modulecan also be
put into sleep mode to lower power consump-tion when not
needed.
Sensors and Peripherals
The eBug features a range of sensors and peripherals asshown in
Figure 5:
Analog temperature sensor: Enables measurementof temperatures
from 2 C to 150 C with up to0.5 C accuracy.
Figure 6: eBug expansion header
Analog light sensor: Enables measurement of illumi-nances up to
100,000 lux via an adjustable softwaregain setting.
Speaker: Driven by a 1 W mono BTL audio power am-plifier. The
amplifier can be shutdown when not
needed to reduce power consumption.Liquid crystal display: 2x16
character LCD (with
software-adjustable intensity backlight) outputsvarious run-time
information such as CPU usage,test status, battery/supply
voltage(s), remainingbattery capacity etc.
RGB LEDs: 16 RGB LEDs driven by a two cascaded24-channel 12-bit
PWM LED drivers allow the gen-eration of almost any colour for
visual feedback pur-poses. These LEDs are located in equispaced
posi-tions on the edge of the eBug.
Infrared (IR) receivers/proximity sensors: IR re-ceivers or
alternatively, proximity sensors (or both)can be installed in 8
equispaced positions on theedge of the eBug depending on the
required appli-cation.
Infrared emitters: 16 IR emitters also equispaced onthe edge of
the eBug (but at intervals between theaforementioned IR
receivers/proximity sensors) canbe used for communication (via
modulation) or ba-sic obstacle detection when used in
combinationwith the infrared receivers or proximity sensors,
re-spectively.
Stepper motors: Two 10V 1.8
/step 35 mm hybridbipolar stepper motors provide the eBug with
mo-bility. The on-board stepper motor drivers are ca-pable of full,
as well as 1/2, 1/4, 1/8, and 1/16(micro-)step modes, thus allowing
the eBug to movesmoothly even at low speeds.
Expansion Header
Additional functionality can be easily added to the eBugvia the
Expansion Header which provides power (5 V and
-
8/3/2019 eBug - An Open Robotics Platform for Teaching and
Research
5/9
-
8/3/2019 eBug - An Open Robotics Platform for Teaching and
Research
6/9
Figure 10: eBug API example usage
the robot by simply using this high-level API. Figure 10shows an
example usage of the eBug API to wirelesslyread the value of the
temperature sensor connected tothe ADC.
3 Applications
3.1 Wireless Control TestbedThe first application of the eBug
was to create a testbedwhich not only demonstrated control of
multiple robotsover a wireless link (using a central computer, i.e.
cen-tralized control), but also served as a platform to testvarious
formation control algorithms using real hard-ware. While tracking
robots using augmented-reality(AR) markers has been demonstrated
before [Fiala,2004], the main focus of our application is to create
areliable testbed. As shown graphically in Figure 11, thetestbed
functions as a closed-loop control system as fol-lows:
1. Frame is grabbed from an overhead USB camera.2. Software
running on a nearby PC uses ARToolKit-
Plus 4 to firstly search the frame for any BCH-codedmarkers
(which are located on top of each eBug).The position and
orientation of each eBug in theframe is then calculated.
3. The appropriate control command (in the form of aneBug API
packet) is then calculated for each eBugdepending on the desired
control behaviour.
Figure 12: Overhead view in the control software
4. This command is then finally sent wirelessly (usingan XBee
module connected to the PC) to each eBug.Process repeats from Step
1.
A simple control algorithm was successfully imple-mented on the
testbed which directs each eBug towarda random target position
without collisions with other
robots. The testbed captures frames at 640x480 reso-lution at 60
FPS (frames per second) with control com-mands sent to each eBug at
100 ms intervals. Furthe-more, as the control software is modular
by design, morecomplex control algorithms can easily be run on
thetestbed. A video demonstrating the testbed is availableas a
multimedia attachment to the paper. It can also beviewed
online1.
3.2 eyeBug: eBug with RGB-D Sensing
Figure 13 shows the eyeBug, a real-world example ofhow more
powerful capabilities and features can be eas-ily added to the eBug
by utilizing its expandable de-sign. The eyeBug is an eBug extended
with a MicrosoftKinect5 sensor and a BeagleBoard-xM6:
The Microsoft Kinect is a low-cost RGB-D sensorthat provides
colour and depth images at 30 Hzthrough a USB interface. It has
rapidly gained agrowing user base in the robotics community as itis
both cheap (AUS$150) and has a large commu-nity of open-source
software developers. Exampleimages taken by the eyeBugs Kinect are
shown inFigure 14.
The BeagleBoard-xM is a low-cost ARM Cortex-A8
development board (AUS$150) which includes USB2.0 as well as
many other commonly-used interfaces(e.g UART, SPI, I2C,
Ethernet).
The Kinect communicates with the BeagleBoard-xM viaUSB and a
custom PCB designed to interface the Bea-gleBoards UART to the eBug
allows direct control of therobot. This Kinect Layer is placed
above the eBug LogicLayer and includes boost converter circuitry to
supply
4http://handheldar.icg.tugraz.at/
-
8/3/2019 eBug - An Open Robotics Platform for Teaching and
Research
7/9
Figure 11: Wireless control testbed configuration
the 10 V needed to power the Kinect. Furthermore,the board also
features a dedicated area for prototypingwhich provides access to
3.3 V-tolerant BeagleBoard-xMGPIO lines.
Preliminary results show that the eyeBug is able toperform a
pseudo-random walk around an arena while
avoiding obstacles. The Kinect is used to sense ob-stacles so
that the robot always turns away from thenearest-sensed obstacle.
The algorithm running on theBeagleBoard-xM (with an embedded
version of Ubuntu11.047) is implemented in C++ and makes use
ofOpenCV8 and the libfreenect9 drivers. The
unoptimisedimplementation of our algorithm runs in real-time at12
FPS on the eyeBug. Additional technical details canbe accessed
online1.
A video of the eyeBug is available as a multimediaattachment to
the paper. It can also be viewed online1.
3.3 Performance of Follow the Leader
Formation Control AlgorithmsThe eBugs were also used in a
project which tested theperformance of decentralized algorithms for
formation
5http://www.xbox.com/en-US/kinect6http://beagleboard.org/hardware-xM7http://rcn-ee.net/deb/rootfs/natty/ubuntu-11.
04-r3-minimal-armel.tar.xz8http://opencv.willowgarage.com/9http://openkinect.org/
control under noisy localization information and con-strained
communication conditions. Decentralized con-trol involves the
robots performing tasks without anexternal agent coordinating or
directing the individualrobots. This projects focus was to control
formations ofeBugs with two competing objectives:
1. Move all eBugs from their initial position to a
finaldestination through a path of travel (an arbitrarilydefined
trajectory).
2. Maintain the relative distance between the eBugssuch that a
set formation is retained during theirtravel [Lawton et al.,
2003].
The technique of reconciling those two competing objec-tives
defines different formation control algorithms.
In 2003, Lawton and his team published a seminal pa-per [Lawton
et al., 2003] and proposed three control lawsfor decentralized
formation control under progressively
more rigorous constraints. Using three prototype eBugsin our
research project, we began implementing thesecontrol strategies to
quantify their robustness againstlocalization estimation
inaccuracies and the effects ofrobot-to-robot communication channel
delays and band-width limits.
Early results obtained for one-leader, two-follower for-mations
were published in a technical report [Siripala,2010]. We are
currently bringing more eBugs online formore comprehensive
experiments with larger formations
-
8/3/2019 eBug - An Open Robotics Platform for Teaching and
Research
8/9
Figure 13: eyeBug
Figure 14: Images captured from the eyeBug - Left:RGB, Right:
Depth (the black area closest to the cam-era corresponds to the
approximate 50 cm Kinect sensordeadzone)
involving more complex communication and sensing sce-narios.
4 Conclusions and Future Work
This paper presents the design details of a low-cost
openrobotics platform, the eBug, which is modular, modifi-able and
extensible. Moreover, applications of the plat-
form have clearly demonstrated its ease of use; even
fornon-experts. We are currently expanding our numberof eBugs to 30
robots. This will allow us to tacklea variety of research projects
by validating theoreticalmodels with real world implementations.
Planned re-search projects include networked control systems
[Ab-dallah and Tanner, 2007; Antsaklis and Baillieul, 2007;Sinopoli
et al., 2003; Stubbs et al., 2006] over wirelessnetworks [Kumar,
2001] and networked robotics [Kimet al., 2009; Pohjola et al.,
2009; Jung et al., 2010],communication algorithms in mobile
wireless sensor net-works [Ekici et al., 2006], data harvesting
from sen-
sor fields by using mobile robots [Tekdas et al., 2009;Gu et
al., 2006], and formation control for roboticswarms [Anderson et
al., 2008; Lawton et al., 2003;Tanner et al., 2004; Ren et al.,
2007].
Acknowledgments
The authors would like to acknowledge the following peo-ple who
have contributed in making the eBug possible:
David McKechnie who provided the initial eBugconcept and design
in 2008.
Aidan Galt and Rory Paltridge who both designed
and produced early eBug iterations in 2008 and
2009respectively.
Alexandre Proust for all his work with the Kinect-related
software development.
Tony Brosinsky for his assistance in the productionof the eBug
mechanical layer.
Ray Cooper, Ian Reynolds, Geoff Binns, and Ray-mond Chapman for
their constant technical and lo-gistical support.
The Department of Electrical and Computer Sys-tems Engineering
for their financial support.
References
[Abdallah and Tanner, 2007] C. T. Abdallah and H. G.Tanner.
Complex Networked Control Systems. IEEEControl Systems Magazine,
27(4):3032, August 2007.
[Anderson et al., 2008] B. D. O. Anderson, C. Yu, B. Fi-dan, and
J. M. Hendrickx. Rigid Graph Control Archi-tectures for Autonomous
Formations. IEEE ControlSystems Magazine, pages 4863, December
2008.
-
8/3/2019 eBug - An Open Robotics Platform for Teaching and
Research
9/9
[Antsaklis and Baillieul, 2007] P. Antsaklis and J. Bail-lieul.
Special Issue on Technology of Networked Con-trol Systems.
Proceedings of the IEEE, 95(1):58, Jan-uary 2007.
[Ekici et al., 2006] E. Ekici, Y. Gu, and D.
Bozdag.Mobility-Based Communication in Wireless SensorNetworks.
IEEE Communications Magazine, pages
5662, July 2006.[Fiala, 2004] M. Fiala. Vision Guided Control of
Multi-
ple Robots. 1st Canadian Conference on Computerand Robot Vision
(CRV04), pages 241246, May2004.
[Gu et al., 2006] Y. Gu, D. Bozdag, R. W. Brewer, andE. Ekici.
Data Harvesting with Mobile Elementsin Wireless Sensor Networks.
Computer Networks,50:34493465, 2006.
[Jung et al., 2010] J. H. Jung, S. Park, and S-L Kim.Multi-Robot
Path Finding with Wireless MultihopCommunications. IEEE
Communications Magazine,
pages 126132, July 2010.[Kim et al., 2009] S-L. Kim, W. Burgard,
and D. Kim.
Wireless Communications in Networked Robotics.IEEE Wireless
yCommunications Magazine, pages 45, February 2009.
[Kumar, 2001] P. R. Kumar. New Technological Vistasfor Systems
and Control: The Example of WirelessNetworks. IEEE Control Systems
Magazine, 2001.
[Labrosse, 2011] J. J. Labrosse. MicroC/OS-II Real-Time
Operating System Kernel.
http://www.micrium.com/page/products/rtos/os-ii, 2011.
[Lawton et al., 2003] J. R. T. Lawton, R. W. Beard, andB. J.
Young. A Decentralized Approach to FormationManeuvers. IEEE
Transactions on Robotics and Au-tomation, 19(6):933941, December
2003.
[Pohjola et al., 2009] M. Pohjola, S. Nethi,and R. Jantti.
Wireless Control of a Multihop RobotSquad. IEEE Wireless
Communications, pages 1420,February 2009.
[Ren et al., 2007] W. Ren, R. W. Beard, and E. M.Atkins.
Information Consensus in Multivehicle Co-operative Control. IEEE
Control Systems Magazine,
pages 7182, April 2007.[Sinopoli et al., 2003] B. Sinopoli, L.
Schenato, S. Schaf-
fert, and S. S. Sastry. Distributed Control Appli-cations Within
Sensor Networks. Proceedings of theIEEE, 91(8):12351246, August
2003.
[Siripala, 2010] P. J. Siripala. Decentralized FormationControl
for Dancing eBugs. Technical report, Depart-ment of Electricaland
Computer Systems Engineering, Monash Univer-sity, 2010.
http://titania.ctie.monash.edu.au/ugrad-projects/pj-formation-control.pdf.
[Stubbs et al., 2006
]A. Stubbs, V. Vladimerou, A. T.Fulford, D. King, J. Strick, and
G. E. Dullerud. A
Hovercraft Testbed for Networked and DecentralizedControl:
Multivehicle Systems Control over Networks.IEEE Control Systems
Magazine, pages 5669, June2006.
[Tanner et al., 2004] H. G. Tanner, G. J. Pappas, andV. Kumar.
Leader-to-Formation Stability. IEEETransactions on Robotics and
Automation, 20(3):443455, June 2004.
[Tekdas et al., 2009] O. Tekdas, V. Isler, J. H. Lim, andA.
Terzis. Using Mobile Robots to Harvest Data from
Sensor Fields. IEEE Wireless Communications, pages2228, February
2009.