Embed Size (px)
Citation preview

ECE 4007 L01 DK6 1
FAST: Fully Autonomous Sentry Turret
ECE 4007 L01 DK6Dr. David Keezer
Patrick Croom, Kevin Neas, Anthony Ogidi, Joleon Pettway
ECE 4007 L01 DK6 2
FAST Overview
• Fully Autonomous Sentry Turret – area denial gun turret with integral IFF capabilities
• Improve security, reduce unnecessary casualties, and reduce operational costs
• Intended for US Department of Defense, other armed federal organizations, and licensed private security companies
• $2500 component cost; $200,000 prototype development
ECE 4007 L01 DK6 3
Design Objectives
• Once activated, this system will operate without user interaction
• Uses visual monitoring to detect significant sources of movement
• Rapidly engages targets while avoiding designated friendly personnel
• Easy to use, portable, and low cost
ECE 4007 L01 DK6 4
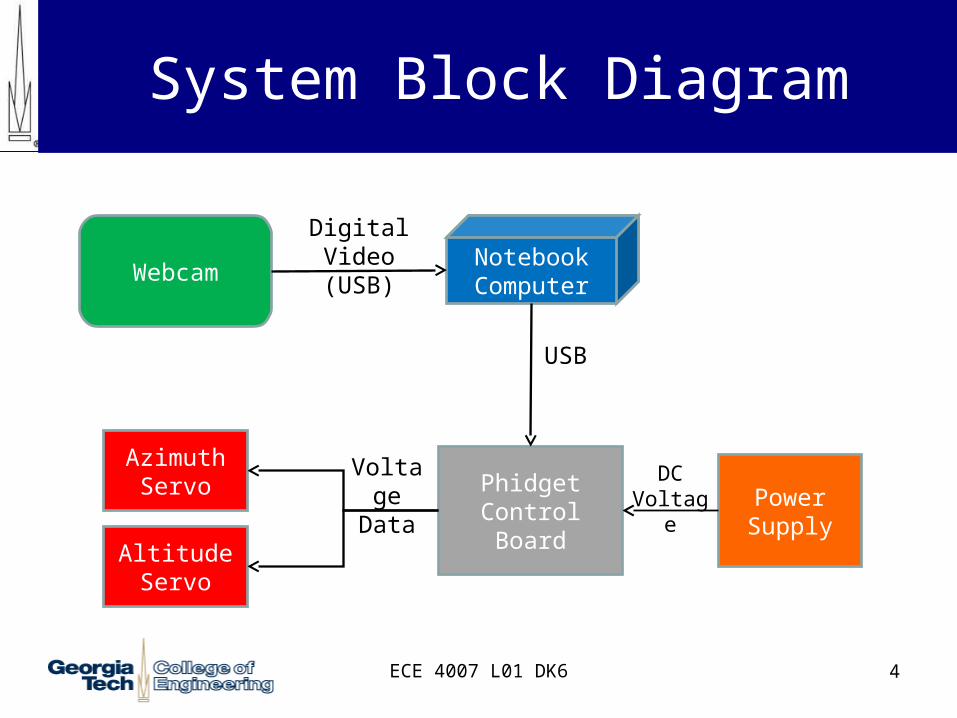
System Block Diagram
WebcamNotebook Computer
Phidget Control Board
Azimuth Servo
Altitude Servo
Power Supply
Digital Video(USB)
USB
DC Voltage
Voltage Data

Turret Configuration
Stand Dimensions: 2’x2’x2’Feet
ECE 4007 L01 DK6 5

ECE 4007 L01 DK6 6
Mechanical Turret
• Will consist of:– Phidget servo controller– A pair of HiTec Servomotors– Pan and Tilt servo mount– Mounted laser pointer

ECE 4007 L01 DK6 7
Motion Tracking Interface

ECE 4007 L01 DK6 8
Motion Tracking Algorithm
StartSave
Current Frame
Save Next Frame
Detect Differences
Locate rectangle around
connecting edges
Mark largest rectangle and its center on
video
Send coordinates
to servo motors

• Identify Friend/Foe (IFF) Capability– Identity determined by color of uniforms– Sample color around aim-point– Compare to predetermined “safe” color
spectrum– Color Spectrum Example:
• Safe Color: Red • Color Range Accepted as “Red”:
– R: 235-255; G: 0-50; B: 0-50
ECE 4007 L01 DK6 9
Target Differentiation

ECE 4007 L01 DK6 10
Problem #1: Target Acquisition Rate
• Motion Tracking software currently exhibits a delay between image capture and target identification
• Acquisition time needs to be fast enough to prevent targets from bypassing the turret

ECE 4007 L01 DK6 11
Target Acquisition Rate Solutions
• Reduce Image Resolution – Improve Simple Compression Algorithm
• Filter and sort motion sources based on relative size
• Employ a more powerful central processor

ECE 4007 L01 DK6 12
Problem #2: Target Differentiation
• Current software converts images to grayscale
• IFF code may decrease run speed
• Color sampling locations may not be consistent

ECE 4007 L01 DK6 13
Preliminary Acceptance Testing

ECE 4007 L01 DK6 14
Project Schedule
• 3/29/10 – Basic Servo Control functional
• 4/05/10 – Total System Integration
• 4/19/10 – IFF Operational• 4/26/10 – Prototype Complete
ECE 4007 L01 DK6 15
Conclusions
• FAST – Revolutionary New Defense Technology
• Reliable Basic Design– Functional Motion Tracking
• Problems:– Acquisition Rate– Target Differentiation
• Questions?