Embed Size (px)
Citation preview

ECE 4510/5530Microcontroller Applications
Chapter 6
Dr. Bradley J. BazuinAssociate Professor
Department of Electrical and Computer EngineeringCollege of Engineering and Applied Sciences

ECE 4510/5530
2
Chapter 6
• Resets• Interrupts• Differences between • Interrupt/Reset Handlers
– Interrupt Service Routines
• Clock and Reset Block• Low Power Modes• COP watchdog timer

ECE 2510 3
What is a Reset?
• Hardware Reset– All hardware and software placed in the initial, default state.
• All registers and values reset to default conditions.• Assume RAM contains random binary values or is unchanged.
(If the power goes off, memory can change, if not, it stays the same.)– Activated by: Power turning on or reset pin on microcontroller
• Software Reset– Restart or reinitialize software without resetting the hardware
• Hardware memory are not changed except under program control, hardware peripheral registers may be “protected”.
• Registers/memory not initialized or used by the software are likely to remain unchanged.
– Activated by: a software command or, if programmed and enabled, a non-maskable interrupt pin … often called NMI(for us, the XIRQ can be used for this task if enabled)

ECE 2510 4
What is an Interrupt?
• An interrupt is a special event that requires the CPU to stop normal program execution and perform some “service related to the event”. – Examples of interrupts include I/O completion, timer time-out,
illegal opcodes, arithmetic overflow, divide-by-0, etc.– For most PCs, an interrupt is caused by a real-world event or by
something going wrong.– In most “real-time” signal processing almost all events drive
interrupts and interrupts are prioritized so the most important interrupt is worked on first.
• Interrupt sources– External: an external pin or level causes the interrupt– Internal: an internal microcontroller peripheral device or CPU
operation causes the interrupt– Software: the swi assembly language instruction is an interrupt

ECE 4510/5530
5
Reset Features
• The initial values of some CPU registers, flip-flops, and the control registers in I/O interface chips must be established in order for the computer to function properly.– The reset mechanism establishes these initial conditions for the
computer system.
• There are at least two types of resets: power-on reset and manual reset. – The power-on reset establishes the initial values of registers and
I/O control registers.– The manual reset without power-down allows the computer to get
out of most error conditions if hardware doesn’t fail.
• A reset is nonmaskable. After a reset, the CPU always starts at a defined address.

ECE 4510/5530
6
Hardware vs. Software Reset
• Hardware Resets are caused due to physical hardware conditions. (e.g. power-on, reset pin activated)– All processor register defaults set, all initialization performed
• Software Resets– Often associated with activation of a non-maskable interrupt
(NMI)– May not reset processor hardware, such as registers or peripherals.– May be used to stop a program and restart the operating system or
CPU monitor or Software (like D-Bug12).

ECE 2510 7
Interrupts
• Interrupts Features– Respond to real time hardware, “software events”, or program
software initiated interrupts.– Software errors can cause software interrupts,
usually referred to as a trap or a fault• Illegal instruction, illegal memory address, etc. • (advanced memory management page fault or segmentation fault)
– SWI is a software interrupt • Transfers program execution to D-Bug12
– Activated by: software or IRQ pin if enabled or a peripheral device hardware interrupt if enabled.
– Software interrupts happen at defined times in code execution– Hardware interrupts happen at random times during code execution

ECE 4510/5530
Functions of Interrupts
• Performing time-critical operations or applications– Real-time data sample systems– Power failure
• Coordinating I/O activities and preventing CPU from being tied up
• Providing a graceful way to handle or exit from errors• Reminding the CPU to perform routine tasks
– Time-of-Day– Health check and status– Other Periodic Functions– Task Switching for a multitasking operating system

ECE 4510/5530
9
Example of Real-Time Code Flow
• Sequential Code with Infinite Loop– Process as time is available
• Interrupts that must be immediately processed
External Interrupt Priority
Interrupt 1
Int 1 Process
Set Int 1 Flag
RTI
Interrupt 2
Int 2 Process
Set Int 2 Flag
RTI
Interrupt M
Int M Process
Set Int M Flag
RTI

ECE 4510/5530
10
Multi-tasking Operating Systems
• Modern computer systems consists of multiple application programs in the memory– CPU time is divided into many short time slots of 10 to 20ms– Multitasking operating systems assign a program to be executed
for one time slot– At end of a time slot or when program is waiting for the
completion of an I/O operation, the operating system takes over and assigns another program for execution
• This technique is called multi-tasking and dramatically improve the CPU performance
• This multi-tasking technique is implemented by using periodic timer interrupts

ECE 4510/5530
Basics of Interrupts (1 of 5)
• Interrupt priority– Allow multiple pending interrupt requests– Resolve the order of service for multiple pending interrupts
• Interrupt maskability– Interrupts that can not be ignored by the CPU are called
nonmaskable interrupts. (An NMI is usually the highest priority interrupt).
– Interrupts that can be ignored by the CPU are called maskable interrupts.
– A maskable interrupt must be enabled before it can interrupt the CPU and must be disabled when it is not allowed to interrupt the CPU.
– An interrupt is enabled by setting an enable/disable bit or flag.

ECE 4510/5530
Basics of Interrupts (2 of 5)
• Interrupt service– CPU executes a program called the interrupt service routine.– A complete interrupt service cycle includes
1. Saving the program counter value in the stack2. Saving the CPU status (including the CPU status register and some
other registers) in the stack3. Identifying the cause of interrupt4. Resolving the starting address of the corresponding interrupt service
routine (ISR)5. Executing the interrupt service routine6. Restoring the CPU status and the program counter from the stack7. Restarting the interrupted program
– An ISR often looks exactly like a subroutine call, except that it is called due to an interrupt.

ECE 4510/5530
Basics of Interrupts (3 of 5)
• Interrupt vector– Starting address of the interrupt service routine
• Interrupt vector table– A table where all interrupt vectors are stored
• Methods of determining interrupt vectors– Predefined locations (Microchip PIC18, 8051 variants)– Fetching the vector from a predefined memory location (HCS12)– Executing an interrupt acknowledge cycle to fetch a vector number
in order to locate the interrupt vector (68000 and x86 families)

ECE 4510/5530
Basics of Interrupts (4 of 5)
• Steps required for interrupt programming– Step 1. Initializing the interrupt vector table– Step 2. Writing the interrupt service routine– Step 3. Enabling the desired interrupts at the appropriate location
in the system code.
• The overhead of interrupts– Saving and restoring of CPU status and other registers. (HCS12
needs to save all CPU registers).– Execution time of instructions of the interrupt service routine.
• Overhead time required to enter and exit an ISR– The execution of the return-from-interrupt (RTI) instruction that
will restore all the CPU registers.

ECE 4510/5530
Basics of Interrupts (5 of 5)
• Nasty details when using interrupts– Interrupt happen at random times that may not be predictable.
• Plan for the worst– Microprocessors should cleanly transition from normal operation to the
interrupt• They typically finish the instruction they are executing and save the
address of next instruction in stack so that it can resume the program later.– Microprocessor needs to identify the cause of the interrupt before it can
take appropriate action. This is built into the microprocessor hardware.– Interrupts will force the microprocessor to stop executing an
application program briefly• What is the application priority as compared to the interrupt?
– Interrupts if they return should resume the previous application code as though nothing happened (registers, CCR, etc.).

Important Interrupt Concepts
• Enabling and Disabling Interrupts– The programmer can let them happen or not– Typically global and local enables (one or all and then one each)– Typically the “interrupt status” can be checked even when not
enabled (polling is when software checks for “events”
• Pending interrupt– An interrupt waiting to happen
• Nested interrupts– When an interrupt is allowed to occur while the software is
executing another interrupt– Typically, interrupts are disabled automatically while an interrupt
is being serviced … waiting interrupts are “pending”.
ECE 2510 16

Using Interrupts
• Initialize the interrupting function and set the local interrupt enable bit– clear pending interrupts if possible
• Make sure a valid interrupt service routine (ISR) exists• Make sure the system can find the ISR code
– A ISR address table is often used for defined types of interrupts– Also called an interrupt vector (IV) table (address of address)
• When ready, set the global interrupt enable– Pending interrupts will immediately be serviced– Interrupt ISR will start where the IV says, even if you forgot to
define where in the IVECE 2510 17

ECE 4510/5530
18
Major Interrupt Issues
• Maskable/Non-Maskable Interrupts• Interrupt Priority• Interrupt Service• Interrupt Vector• Interrupt Programming• Interrupt Overhead

ECE 4510/5530
19
Maskable Interrupt Operation
• Program can request the CPU to service or ignore a maskable interrupt by setting or clearing an enable bit– When an interrupt is enabled, the CPU will respond to it– When an interrupt is disabled, the CPU will ignore it
• An interrupt is said to be pending when active but not yet serviced by the CPU
• Pending interrupt may or may not be serviced depending on whether or not they have priority and are enabled
• Computer system normally provides a global (all maskable interrupts) and local interrupt masking capability

ECE 2510 20
Maskable Interrupt Operation
• Program can request the CPU to service or ignore a maskable interrupt by setting or clearing an enable bit– When an interrupt is enabled, the CPU will respond to it– When an interrupt is disabled, the CPU will ignore it
• Multiple level masks (both enabled to operate):– Global enable bit
• all local interrupts are enabled or disabled– Local enable bit
• each interruptible function has an enable/disable bit
• HC12 also has a special XIRQ interrupt

ECE 4510/5530
21
NMI and the HC12
• The XIRQ input is an updated version of the NMI input found on earlier generations of MCUs.– Non-maskable interrupts are often used to deal with major system failures, such
as loss of power.– However, enabling non-maskable interrupts before a system is fully powered
and initialized can lead to spurious interrupts. The X bit provides a mechanism for enabling non-maskable interrupts after a system is stable.
– By default, the X bit is set to 1 during reset. As long as the X bit remains set, interrupt service requests made via the XIRQ pin are not recognized. An instruction must clear the X bit to enable non-maskable interrupt service requests made via the XIRQ pin. Once the X bit has been cleared to 0, software cannot reset it to 1 by writing to the CCR. The X bit is not affected by maskable interrupts.
b7 b6 b5 b4 b3 b2 b1 b0
S X H I N Z V C The CCR

ECE 2510 22
Enabling the XIRQ pin Interrupt
• After Reset, the X status bit is set to 1• To allow XIRQ based “non-maskable interrupts” set the bit
to 0
ANDCC #$BF ;AND CCR with 1011 1111 or $BF
Also needed: interrupt vector and XIRQ ISR
b7 b6 b5 b4 b3 b2 b1 b0
S X H I N Z V C The CCR
Initially off, manually turned on

ECE 2510 23
XIRQ and the CCR X Bit
• When an XIRQ interrupt occurs after non-maskable interrupts are enabled, both the X bit and the I bit are set automatically to prevent other interrupts from being recognized during the interrupt service routine. – The mask bits are set after the registers are pushed onto the stacked, but
before the interrupt vector is fetched.– Normally, a return-from-interrupt (RTI) instruction at the end of the
interrupt service routine restores register values that were present before the interrupt occurred.
• Since the CCR is stacked before the X bit is set, the RTI normally clears the X bit, and thus re-enables non-maskable interrupts. – It is possible to manipulate the stacked value of X so that X is set after an
RTI, but there is no software method to reset X (and disable XIRQ) once X has been cleared.
Interrupts are disabled once an interrupt occurs and an
ISR begins

ECE 4510/5530
24
Global Interrupt Mask
• When none of the interrupts are desirable, the processor can disable all the interrupts by clearing the global interrupt enable bit.
• CCR bit I is the global interrupt mask bit– The I bit enables and disables maskable interrupt sources. – By default, the I bit is set to 1 during reset. – An instruction must clear the I bit to enable maskable interrupts. – While the I bit is set, maskable interrupts can become pending and
are remembered, but operation continues uninterrupted until the I bit is cleared.
b7 b6 b5 b4 b3 b2 b1 b0
S X H I N Z V C

ECE 4510/5530
25
Enabling Global Interrupt
• After Reset, the I status bit is set to 1• To allow interrupts (except NMI) set the bit to 0
ANDCC #$EF ; AND CCR with 1110 1111 or $EForCLI ; Clear interrupt mask bitAlso needed:
lower level interrupt enables, interrupt vectors, and ISRs
• To disable interrupts reset the bit to 1ORCC #$10 ; OR CCR with 0001 0000 or $10orSEI ; Set interrupt mask bit
The CCRb7 b6 b5 b4 b3 b2 b1 b0
S X H I N Z V C

ECE 2510 26
CCR: I Mask Bit
• When an interrupt occurs after interrupts are enabled, the I bit is automatically set to prevent other maskable interrupts during the interrupt service routine. – The I bit is set after the registers are stacked, but before the first
instruction in the interrupt service routine is executed.– Normally, an RTI instruction at the end of the interrupt service
routine restores register values that were present before the interrupt occurred.
• Interrupts can be re-enabled by clearing the I bit within the service routine– implementing a nested interrupt management scheme requires
great care and seldom improves system performance.

Interrupt Hints
• At the beginning of the program, execute an “SEI”– Insure that interrupts will not occur during initialization. – You will be initializing peripherals and enabling the local interrupt
bits. So the global bit keeps them from occuring.
• When initialization is complete, enable interrupts “CLI”– Typically just prior to starting the main programming loop
• Try never to use nested interrupts– To perform nested interrupts, you must execute a CLI inside the
ISR that can be nested– If priority/time is a problem, for non-critical interrupts immediately
set flags and return … thereby spending as little time as possible in the ISR.
ECE 2510 27

ECE 4510/5530
28
Individual Interrupt Mask Bits
• The processor can selectively enable certain interrupts while at the same time disable other undesirable interrupts– When an interrupt is undesirable it can be disabled while at the
same time allowing other interrupt sources to be serviced by the processor
• This is achieved by providing each interrupt source an enable bit in addition to the global interrupt mask– These bits are defined as part of the on-chip peripheral devices and
parallel I/O ports– Example: the IRQ pin
• Bit 6 of the INTCR or IRQCR register (Addr. $001E) must be set

ECE 4510/5530
29
Major Interrupt Issues
• Maskable Interrupts• Interrupt Priority• Interrupt Service• Interrupt Vector• Interrupt Programming• Interrupt Overhead

ECE 4510/5530
30
Interrupt Priority
• Controller may supports multiple interrupt sources at the same time– It is possible that several interrupts would be pending at the same
time– CPU has to decide which interrupt to service during this situation– Solution to this situation is to prioritize the interrupts
• Interrupt with highest priority receives service before interrupts at lower priorities– Many microcontrollers prioritize interrupts in hardware.
In the HC12, interrupt priority is based on the higest interrupt vector address
– For those microcontrollers that do not prioritize interrupts, software can be written to handle certain interrupts before others.

ECE 2510 31
Interrupt Vector Table (1 of 2)
ResetsSWIsXIRQ
Priority
IRQ
Peripheral Interrupts
ECT
SPI
SCI
Ports

ECE 2510 32
Interrupt Vector Table (2 of 2)Priority
Peripheral Interrupts
Ports
SPI

ECE 4510/5530
33
HCS12 Priority
• The priority and vector addresses of all HCS12 interrupts are listed in Table 6.1 on p. 228.
• To raise a one maskable interrupt source to the highest maskable interrupt priority, write the low byte of the vector address of this interrupt to the HPRIO register (Addr. $001F).
PSEL5 PSEL4 PSEL3 PSEL2 PSEL1PSEL7 PSEL6 07 6 5 4 3 2 1 0
Figure 6.1 Highest priority I interrupt register
$001F

ECE 4510/5530
34
Major Interrupt Issues
• Maskable Interrupts• Interrupt Priority• Interrupt Service• Interrupt Vector• Interrupt Programming• Interrupt Overhead

ECE 4510/5530
35
Interrupt Service
• CPU provides service to an interrupt by executing a program called an interrupt service routine (ISR)– The ISR begins at predefined address locations– The HCS12 has a predefined location for each interrupt where the
address of the ISR can be found. This is called an interrupt vector.
• After providing service to an interrupt, the CPU must resume normal program execution– It achieves this by saving the program counter and the CPU status
information before executing the interrupt service routine and then restoring the saved program counter and CPU status before exiting the interrupt service routine.

ECE 4510/5530
36
Interrupt Service
• Interrupt service cycle involves1. Saving the program counter value in the stack2. Saving the CPU status (including the CPU status register and
some other registers) in the stack3. Identifying the source of the interrupt4. Resolving the starting address of the corresponding interrupt
service routine5. Executing the interrupt service routine6. Restoring CPU status from the stack7. Restoring the CPU status and the program counter from the stack8. Resuming the interrupted program

ECE 4510/5530
37
ISR Starting Address or Vector
• The term interrupt vector refers to the starting address of the interrupt service routine
• Different processors use varying ways to determine the interrupt vector1. Predefined locations (Microchip PIC18, 8051 variants)2. Executing an interrupt acknowledge cycle to fetch a vector
number in order to locate the interrupt vector (68000 and x86 families)
3. Fetching the vector from a predefined memory location (HCS12)

ECE 4510/5530
38
Interrupt Acknowledge(68000 and x86 families)
• Execute an interrupt acknowledge cycle to fetch a vector number in order to locate the interrupt vector– During the interrupt acknowledge cycle, the microprocessor
performs a read bus cycle, and the external I/O device that requested the interrupt places a number on the data bus to identify itself
– This number is called the interrupt vector number– CPU can figure out the starting address of the interrupt service
routine by using this number– Freescale 68000 and intel x86 family supports this method

ECE 4510/5530
39
Predefined ISR Locations(Microchip PIC18, 8051 variants)
• Predefined ISR locations, where the starting address of the service routine is predefined when the microcontroller is designed– Processor uses a table to store all the interrupt service routines– Ex: Intel 8051 microcontrollers– Each interrupt is allocated same number of bytes to hold its service
routine– Each routine is allocated eight words– If routine requires more than eight words, the solution is to place a
jump instruction in the predefined location to jump to the actual service routine

ECE 4510/5530
40
Interrupt Vector(HCS12)
• Fetch the interrupt vector from a predefined memory location– In this approach, the interrupt vector of each interrupt source is
stored at a predefined location in the interrupt vector table– The microprocessor or microcontroller can access it directly to
obtain the interrupt vector– HCS12 and most other freescale microcontrollers use this approach

ECE 4510/5530
41
Interrupt Vector Addresses
No CCR Mask$FFFE, $FFFF Power-On (POR) or External Reset$FFFC, $FFFD Clock Monitor Reset$FFFA, $FFFB Computer Operating Properly
Reset(COP Watchdog Timer Reset)$FFF8, $FFF9 Unimplemented Instruction Trap$FFF6, $FFF7 Software Interrupt Instruction (SWI)
X-bit CCR Mask$FFF4, $FFF5 XIRQ Pin
I-bit CCR Mask$FFF2, $FFF3 IRQ Pin$FFC0–$FFF1 Device-Specific Interrupt Sources
See Table 6.1 on p. 268 for a complete list

ECE 2510 42
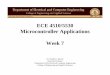
Interrupts using D-Bug12
• D-Bug12 contains default interrupt handlers for all of the implemented MC9S12DP256 interrupt vectors. – However, to allow a programmer to utilize peripherals in an interrupt driven
manner, a RAM based interrupt vector table is provided by D-Bug12. Each of the 64 entries in the table consists of a two byte address with the table beginning at $3E00.
– Initially, all entries in the table have an address of $0000. Storing a value other than $0000 in any of the RAM interrupt vector table entries causes execution of the interrupt service routine pointed to by the address when an associated interrupt occurs.
• If an unmasked interrupt occurs and a table entry contains the default address of $0000, program execution is returned to D-Bug12 where a message is displayed indicating the source of the interrupt and displays the CPU registers at the point where the program was interrupted.

ECE 4510/5530
43
D-Bug12 RAM Based Interrupts
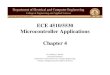
• Figure 4 shows the correspondence between the interrupt source and the two byte RAM interrupt vector. – SCIO will be ignored,
it is used by D-Bug12
• Use these addresses instead of those previously presented …
From: Reference Guide For D–Bug12 Version 4.x.x

ECE 4510/5530
44
Major Interrupt Issues
• Maskable Interrupts• Interrupt Priority• Interrupt Service• Interrupt Vector• Interrupt Programming• Interrupt Overhead

ECE 2510 45
Example of Real-Time Code Flow
• Sequential Code with Infinite Loop– Process as time is available
• Interrupts that must be immediately processed
External Interrupt Priority
Interrupt 1
Int 1 Process
Set Int 1 Flag
RTI
Interrupt 2
Int 2 Process
Set Int 2 Flag
RTI
Interrupt M
Int M Process
Set Int M Flag
RTI

ECE 2510 46
Example “Software” Radio(like a cellular telephone)
• Digital Signal Processing Section– Other blocks are RF, analog, discrete digital, or …

ECE 2510 47
Example Software Radio DSP Code
Based on TI TMS320C6701 Processor Audio example
• Squares are hardware peripherals, either embeeded in the processor or discrete ICs
• ISRs are interrupt service routines
– Handle real-time data block movements
• Red receiver to audio• Orange Mic to transmit
Audio Line-In
AudioLine-Out
Audio Codec
DDR DXR
DMA0
McBSP0 Serial Port
AudioDMA ISR
Receiver DDC Output
TransmitDUC Input
DDR DXR
DMA1
McBSP1Serial Port
BasebandDMA ISR
Demodulation
Audio In Memory
Audio Out Memory
BasebandIn
Memory
BasebandOut
Memory
ModulationCommand and Control
Display and Status
Main Program Loop Routines
Watch Dog Timeout
Watch Dog ISR
InAudio In Audio out Out

ECE 2510 48
Interrupt Routine Programming
• Interrupt programming deals with how to provide service to the interrupt. Three steps are involved in interrupt programming:– Step 1a. Set the interrupt vector table with the ISR start address.
• Maybe be performed automatically using assembler/compiler directives.
– Step 1b. Initializing the peripheral hardware involved.– Step 2. Writing the interrupt service routine.– Step 3. Enabling the desired interrupts at the appropriate
location in the system code.

ECE 2510 49
Interrupt Programming: Step 1a
• Step1a:– Initialize the interrupt vector table– This step is not needed for microprocessors that have predefined
interrupt vectors, but we need to do it!– Two methods to initialize the interrupt vector table
• Can be done using the .org assembler directive• By loading the start address of ISR into index register and storing it
into the Debug-12 interrupt vector table memory
• Step 1b:– Initialize peripherals that will be used
• I/O port directions, levels, etc.

ECE 2510 50
Interrupt Programming: Step 1 Example
Ex: • Method1 (may cause ICC12 size problems)
.org $xxxx ; xxxx is the vector table addressInterrupt_vector: .word ISR_1 ; store the starting address of
; interrupt service routine 1– The above instruction stores the start address of interrupt service
routine by name ISR_1 into the interrupt vector table address specified by the .org assembler directive
• Method2ldx #ISR_1 ; Load start address of interrupt service routine to
; index register Xstx $xxxx ; Store the start address to the interrupt vector table
; address specified

ECE 4510/5530
51
Interrupt Programming: Step 2
• Step2:– Write the interrupt service routine– Interrupt service routine should be as short as possible– For some interrupts, the service routine may only output a message
to indicate that something unusual has occurred
• An ISR is similar to the subroutine– An ISR uses a return from interrupt (RTI) instead of return from
subroutine (RTS) instruction
• Execution of the RTI instruction will automatically restore all the CPU registers.– Interrupts automatically push and pull register and status values

ECE 4510/5530
52
Interrupt programming: Step 2 Example
Ex:IRQ_ISR:
ldaa #$55adda $1032staa PortArti
• This service routine adds $55 to the contents of address $1032 and writes the result to PORTA (Addr. $0000) whenever a particular interrupt occurs
• Execution of the RTI instruction will return CPU control to the new address

ECE 4510/5530
53
Interrupt Programming:Step 3
• Enable the interrupts to be serviced– Interrupts can be enabled by clearing the global interrupt mask– Set the local interrupt enable bits in the I/O control registers
• One common mistake is forgetting to enable interrupts when writing interrupt driven applications!
• Commands:SEI instruction for disabling the global interrupt maskCLI instruction for clearing the global interrupt mask

ECE 2510 54
• Find new PC• Push Y• Push X• Push D• Push CCR• Set I bit in CCR
– Disable I interrupts
• Set X bit in CCR– Disable XIRQ
interrupt
Interrupt Execution

ECE 4510/5530
55
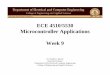
• The stack order on entry of an interrupt– The HCS12 saves all CPU registers on an interrupt.– The order of saving CPU registers is shown below.
• The RTI instruction– RTI is used to terminate interrupt service routines.– RTI will restore CPU registers from the stack.– The HCS12 will continue to execute the interrupted program unless there
is another pending interrupt.
.
Figure 6 .3 Stack o rde r o n entry to inte rrupts
re turn address
[Y]
[X]
[B]
[A]
[CCR] SP
SP + 1
SP + 2SP + 3
SP + 5
SP + 7
Stack after an Interrupt
Return.L
Return.H
Y.H
Y.L
Return Address
Protect Y
Initial SP
X.H
X.LProtect X
A or D.H
B or D.LProtect D=A:B
CCRProtect CCRPost Int SP(9 bytes)
1,SP
0,SP
2,SP
3,SP
5,SP
7,SP

ECE 4510/5530
56
Interrupt Stack Memory Layout

ECE 4510/5530
57
Major Interrupt Issues
• Maskable Interrupts• Interrupt Priority• Interrupt Service• Interrupt Vector• Interrupt Programming• Interrupt Overhead

ECE 2510 58
When Does the MCU Recognize Interrupt Requests?
• The MCU recognizes the interrupt request when it completes the execution of the current instruction unless the current instruction is a fuzzy logic instruction. For fuzzy logic instructions, the HCS12 recognizes the interrupt immediately.– Once enabled, an interrupt request can be recognized at any time
after the I mask bit is cleared
• Before HCS12 starts to service an interrupt, it will set the I mask to disable other maskable interrupts
• when CPU begins to service an interrupt, the instruction queue is refilled, return address is calculated and contents of all CPU registers (except Stack Pointer) are saved onto the stack

ECE 2510 59
Overhead of Interrupt Start
• Although interrupt mechanism provides many advantages, it also involves some overhead
• The overhead of HCS12 interrupt includes:– Saving CPU registers including A, B, X, Y and CCR and fetching
the interrupt vector takes at least 9E cycles– RTI instruction restores all the CPU registers that have been stored
in the stack by the CPU during the interrupt takes from 8 to 11E clock cycles (based on whether a new interrupt is pending)
• Execution time of the interrupt service routine depends on the type and the number of instructions in the service routine
• Total overhead is thus at least 17E clock cycles, which amounts to almost 0.7 μsec for a 24MHz E-clock

ECE 2510 60
Return From Interrupt (RTI)
RTI Instruction:• RTI instruction is used to terminate interrupt service routines• RTI is an 8-cycle instruction when no other interrupt is pending and a
11-cycle instruction when other interrupt is pending• In either case first 5 cycles are used to restore the CCR, B:A, X, Y and
the return address from the stack• HCS12 then clears the I mask to enable further maskable interrupts• If no interrupt is pending, three program words are fetched to fill the
instruction queue from the area of return address and processing proceeds from there

ECE 2510 61
Pending Interrupt Requests
• If another interrupt is pending after registers are restored– A new vector is fetched– Stack pointer is adjusted to point at the CCR value that was just
recovered (SP=SP-9)– This makes it appear that registers are stacked again– Then three program words are fetched to refill the instruction
queue, starting at the address the vector points to– Processing then continues with execution of the instruction that is
now at the head of the queue

ECE 4510/5530
62
Interrupts in EVB Mode
• D-Bug12 contains default interrupt handlers for all of the implemented MC9S12DP256 interrupt vectors. – However, to allow a programmer to utilize peripherals in an interrupt
driven manner, a RAM based interrupt vector table is provided by D-Bug12. Each of the 64 entries in the table consists of a two byte address with the table beginning at $3E00.
• Initially, all entries in the table have an address of $0000. Storing a value other than $0000 in any of the RAM interrupt vector table entries causes execution of the interrupt service routine pointed to by the address when an associated interrupt occurs. – If an unmasked interrupt occurs and a table entry contains the default
address of $0000, program execution is returned to D-Bug12 where a message is displayed indicating the source of the interrupt and displays the CPU registers at the point where the program was interrupted.

ECE 4510/5530
63
D-Bug12 RAM Based Interrupts
• Figure 4 shows the correspondence between the interrupt source and the two byte RAM interrupt vector. – SCIO will be ignored,
it is used by D-Bug12
• Use these addresses instead of those previously presented …
From: Reference Guide For D–Bug12 Version 4.x.x

SPECIFIC INTERRUPT ELEMENTS
ECE 4510/5530
64

ECE 4510/5530
65
External (IRQ) interrupt
• IRQ pin the only external maskable interrupt signal available in the HCS12
• IRQ interrupt pin can be edge- triggered (falling edge) or level-triggered (low) signal
• The triggering method is selected by programming the IRQE bit of the “Interrupt Control register” (IRQCR)
• The IRQ pin interrupt has a local enable bit IRQEN bit, which is bit6 of the IRQCR (location $001E)

ECE 4510/5530
66
External (IRQ) Interrupt
• IRQCR Register

ECE 4510/5530
67
Making IRQ Level-sensitive
• Pros– Multiple interrupt sources can be tied to this pin. Whenever one of
the interrupt sources that are tied to the IRQ pin is low, an interrupt request will be detected by the HCS12
• Cons– Need to make sure that the IRQ signal has become inactive before
the IRQ service routine is complete if there is only one interrupt request pending.

ECE 4510/5530
68
Making IRQ Edge-sensitive
• Pros– Advantage of making the IRQ interrupt edge-sensitive (falling
edge) is that the user does not need to concern about the assertion time of the IRQ signal
• Cons– This approach is not appropriate in a noisy environment– Any noise spikes could generate an undesirable interrupt request
on the IRQ pin

ECE 2510 69
External IRQ Example
Ex: • Assume that the IRQ pin of HCS12 is connected to a 1-Hz
digital waveform and PortB is connected to eight LED’s. • Write a program to configure PortB for output and enable
the IRQ interrupt• Write the service routine for the IRQ interrupt• Service routine for the IRQ interrupt should simply
increment a counter and output it to PortB (a parallel port on the microprocessor)

ECE 2510 70
External IRQ Example Steps
• Step1: Write ISR start address into the IRQ vector address• Step2: Configure PortB as output port• Step3: Disable global maskable interrupt pin• Step4: Enable IRQ interrupt, by enabling the local interrupt
in the interrupt register• Step5: Enable global maskable interrupts• Step6: Develop the interrupt service routine

ECE 2510 71
Using IRQ: Code (1 of 2)
.area prog(abs)PortB = $01DDRB = $03 ; DDRB is the data direction registers for PORTB to
; configure a I/O pin for output (1) or input (0), write a 1 or 0 to; the corresponding bit in the data direction register
IRQCR = $1E ;Defined as INTCR in Register definition file.text_main::
sei ; set interrupt mask (insure ints off)lds #$3C00 ; load the stack pointerldx #IRQ_isr ;Load start addr of ISRstx $3E72 ;Store in the vector locationldaa #$FF ;set PortB as output portstaa DDRBldaa #$00staa PortB ;Initial output to the port

ECE 2510 72
Using IRQ: Code (2 of 2)
ldaa #$C0staa IRQCR ; falling edge external interrupt enablecli ; clear interrupt mask to enable I interrupts
End: nop ; do nothingnopbra End
.org $1400IRQ_isr:
inc 1,SP ; increment A reg in interrupt stackstaa PortB ; let the PortB outputs be the A reg valuerti

ECE 2510 73
External IRQ Example C Code (1 of 2)
#include <hc12def.h>#include <mc9s12dp512.h> //header file to be includedchar i = 0;
main() {
asm(“sei”); // insure that INTs are offDDRB = 0xFF; // initialize port DDRPORTB = i; // provide an initial output valueINTCR = 0xC0; // setup and enable IRQasm(“cli”); // enable INTswhile() {asm(“nop”); // do nothing}
}

ECE 2510 74
External IRQ Example C Code (2 of 2)
// The ISR code with pragma so an RTI is used for returning#pragma interrupt_handler IRQ_isr void IRQ_isr (void) {
i = i+1;PORTB = i;
}
// Make sure the address of the ISR is in the Int Vector Table#pragma abs_address:0x3E72 void (*ISR_VECTOR[]) () = {IRQ_isr}; #pragma end_abs_address

ECE 2510 75
Non Maskable Interrupts
• Three interrupts are available in this category– XIRQ pin– SWI instruction– Unimplemented opcode trap

ECE 2510 76
Non Maskable (XIRQ)
• XIRQ Pin Interrupt Non Maskable interrupt– Disabled during a system reset and upon entering the service
routine of another XIRQ interrupt.
• If X bit in the CCR sets, XIRQ pin is disabled
• After system initialization, software can clear X bit of the CCR register to enable the XIRQ interrupt using
andcc #$BF ; anding CCR register instruction– Software cannot reset the X bit from 0 to 1 once it has been
cleared, and hence the interrupt requests made via the XIRQ pin become non maskable

ECE 2510 77
Non Maskable SWI & Opcode Trap
• Unimplemented Opcode Trap:– If HCS12 attempts to execute one of the unused opcodes, an
unimplemented opcode trap occurs
• Software Interrupt Instruction (SWI):– Execution of the SWI instruction causes an interrupt without an
interrupt request signal– SWI is not inhibited by the global mask bits in the CCR– SWI instruction is commonly used in the debug monitor to
implement breakpoints and to transfer control from a user program to the debug monitor

CLOCK AND RESET GENERATOR
ECE 4510/5530
78

ECE 4510/5530
79
Microcontroller Clocks
• Welcome to hardware …
• Typical microcontrollers have multi-function clock generation circuitry. Built in user flexibility …– On IC clock generation– External input clock ports– External crystal connections for clocks– Clock rate multiplication/division circuits (PLL or counters)– Low power allowances (slow or stop the clock)– Special operation during power-on reset and hardware reset– Periodic clock based interrupts (watchdog timer)– And more …..

ECE 4510/5530
80
Clock and Reset Generation Block (CRG) (1 of 2)

ECE 4510/5530
81
Clock and Reset Generation Block (CRG) (2 of 2)
• CRG generates the clock signals required by the HCS12 instruction execution and all peripheral operations.– The clock signal has the form of square waveform.
• Crystal oscillators are often used to generate clock signals.– The crystal oscillator output is sinusoidal wave and must be squared up
before it can be used. The HCS12 has an internal circuit to do this square up operation.
– The CRG block also has a PLL circuit that can multiply the frequency of the incoming clock signal.
• The CRG can also accept an external oscillator (square waveform). – The XCLKS signal must be tied low (for MC9S12DP256B) in order to
use external clock signal.

ECE 4510/5530
82
CRG Configuration Registers
CRG Block User Guide V02.07, Doc. Number S12CRGV2/D

ECE 4510/5530
83
MC9S12DP256B Device User Guide
MC9S12DP256B Device User Guide V02.15, Doc. Number 9S12DP256BDGV2/D

ECE 4510/5530
84
Phaselockloop
1
0
1
0
Clockmonitor
Oscillator OSCCLK
PLLCLK
PLLSEL or SCM
SCM
clockphase
generator2
WAIT,STOP
wait(RTIWAI),stop(PSTP,PRE)
RTI enable
RTI
COP
wait (COPWAI),stop(PSTP, PCE)
COP enable
wait (SYSWAI),stop
stop (PSTP)
wait (CWAI,SYSWAI)stop
Coreclock
Busclock
oscillatorclock
oscillatorclock (pseudo stopmode)
extal
xtal
gatingcondition
= clock gate
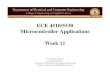
Figure 6.15 HCS12 clock generation circuit
SYSCLK
Choice of Clock Source (1 of 3)
E-Clock
Real Time Interrupt
Comp. Operating Properly

ECE 4510/5530
85
Choice of Clock Source (2 of 3)
• The user can choose between using the external crystal or oscillator to produce the clock signal.– The external crystal is connected between the EXTAL and XTAL
pins and needs an on-chip oscillator circuitry to square it up.– The external clock source provided by the oscillator is connected
to the EXTAL pin and has a 2.5V peak-to-peak magnitude for D family.
• The XCLKS signal must be grounded to select the external clock signal.

ECE 4510/5530
86
Crystal or External Clock Connection
CRG Block User Guide V02.07, Doc. Number S12CRGV2/D

ECE 4510/5530
87
Choice of Clock Source (3 of 3)
• The output from the OSC module in Figure 6.4 may bypass or go through the PLL circuit.– The PLL circuit has the capability to multiply incoming signal
frequency and stabilize its output signal frequency.
• Either the OSCCLK or the PLLCLK can be chosen as the SYSCLK which will be divided by 2 to derive the bus clock to control the instruction execution and peripheral operation. (E-clock from timing).

ECE 4510/5530
88
Phase Lock Loops
• A Phase Lock Loop is capable of providing an integer change up or down in the clock rate input to the PLL– A voltage controlled oscillator is used
CRG Block User Guide V02.07, Doc. Number S12CRGV2/D

ECE 4510/5530
89
(SYNR + 1)PLLCLK = 2 OSCCLK ----------------------- (6.1)
(REFDV + 1)
Phase Locked Loop (PLL) (1 of 5)
• The frequency of the PLLCLK is controlled by registers synthesizer (SYNR) and reference divide (REFDY) using the following equation:
NOTE: PLLCLK must not exceed the maximum operating system frequency.
Maximum bus frequency is 25 MHz.
Therefore, maximum PLLCLK is 50 MHz.
The lab modules use a 16 MHz external crystal, PLLCLK of 48 MHz, and
E-clock (bus frequency) of 24 MHz.

ECE 4510/5530
90
PLL Rate Registers
• SYNR: 0 to 63• REFDV: 0 to 15
1612min OSCCLKPLLCLK
1642max OSCCLKPLLCLK
CRG Block User Guide V02.07, Doc. Number S12CRGV2/D

ECE 4510/5530
91
PLL Control Register (1)
• Read: anytime• Write: refer to each bit for individual write conditions• CME — Clock Monitor Enable Bit
– 1 = Clock monitor is enabled. Slow or stopped clocks will cause a clock monitor reset sequence or Self Clock Mode.
– 0 = Clock monitor is disabled.• PLLON — Phase Lock Loop On Bit
– 1 = PLL is turned on. If AUTO bit is set, the PLL will lock automatically.– 0 = PLL is turned off.
• AUTO — Automatic Bandwidth Control Bit– 1 = Automatic Mode Control is enabled and ACQ bit has no effect.– 0 = Automatic Mode Control is disabled and the PLL is under software control, using ACQ bit.
• ACQ — Acquisition Bit– 1 = High bandwidth filter is selected.– 0 = Low bandwidth filter is selected.
CRG Block User Guide V02.07, Doc. Number S12CRGV2/D

ECE 4510/5530
92
PLL Control Register (2)
• PRE — RTI Enable during Pseudo Stop Bit– 1 = RTI continues running during Pseudo Stop Mode.– 0 = RTI stops running during Pseudo Stop Mode.
• PCE — COP Enable during Pseudo Stop Bit– 1 = COP continues running during Pseudo Stop Mode– 0 = COP stops running during Pseudo Stop Mode
• SCME — Self Clock Mode Enable Bit– 0 = Detection of crystal clock failure causes clock monitor reset .– 1 = Detection of crystal clock failure forces the MCU in Self Clock Mode
CRG Block User Guide V02.07, Doc. Number S12CRGV2/D

ECE 4510/5530
93
CRG Clock Selection (1)
Read: anytimeWrite: refer to each bit for individual write conditions• PLLSEL — PLL Select Bit
– 1 = System clocks are derived from PLLCLK.– 0 = System clocks are derived from OSCCLK.
• PSTP — Pseudo Stop Bit– This bit controls the functionality of the oscillator during Stop Mode.– 1 = Oscillator continues to run in Stop Mode (Pseudo Stop). The oscillator amplitude is reduced.– 0 = Oscillator is disabled in Stop Mode.
• SYSWAI — System clocks stop in Wait Mode Bit– 1 = In Wait Mode the system clocks stop.– 0 = In Wait Mode the system clocks continue to run.
• ROAWAI — Reduced Oscillator Amplitude in Wait Mode Bit.– 1 = Reduced oscillator amplitude in Wait Mode.– 0 = Normal oscillator amplitude in Wait Mode.
CRG Block User Guide V02.07, Doc. Number S12CRGV2/D

ECE 4510/5530
94
CRG Clock Selection (2)
• PLLWAI — PLL stops in Wait Mode Bit– 1 = PLL stops in Wait Mode.– 0 = PLL keeps running in Wait Mode.– If PLLWAI is set, the CRG will clear the PLLSEL bit before entering Wait Mode. The PLLON bit
remains set during Wait Mode but the PLL is powered down. Upon exiting Wait Mode, the PLLSEL bit has to be set manually in case PLL clock is required.
– While the PLLWAI bit is set the AUTO bit is set to 1 in order to allow the PLL to automatically lock on the selected target frequency after exiting Wait Mode.
• CWAI — Core stops in Wait Mode Bit– 1 = Core clock stops in Wait Mode.– 0 = Core clock keeps running in Wait Mode.
• RTIWAI — RTI stops in Wait Mode Bit– 1 = RTI stops and initializes the RTI dividers whenever the part goes into Wait Mode.– 0 = RTI keeps running in Wait Mode.
• COPWAI — COP stops in Wait Mode Bit– 1 = COP stops and initializes the COP dividers whenever the part goes into Wait Mode.– 0 = COP keeps running in Wait Mode.
CRG Block User Guide V02.07, Doc. Number S12CRGV2/D

ECE 4510/5530
95
movb #2,SYNR ; set SYNR to 2movb #0,REFDV ; set REFDV to 0movb #$80,CRGSEL ; enable PLL, keep SYSCLK running in wait mode,
; keep RTI, COP, PLL & core running in wait modemovb #$60,PLLCTL ; disable clock monitor, enable PLL, set automatic
; bandwidth control, disable RTI & COP in pseudo stop
Phase Locked Loop Example 6.2
• Example 6.2 There is a system that derives its bus clock from the PLL circuit and an external clock of 8 MHz is selected. The desired bus clock is 24 MHz. Write an instruction sequence to perform the desired configuration.– Solution:
• The frequency of OSCCLK is 8 MHz.– The XCLKS pin must be grounded to select oscillator as clock source.
• Make the SYSCLK frequency 48 MHz.• 48 MHz = 2 8 MHz [SYNR + 1] /[REFDV + 1]
– One solution is to set SYNR and REFDV to 2 and 0, respectively.

ECE 4510/5530
96
movb #5,SYNR ; set SYNR to 5movb #0,REFDV ; set REFDV to 0movb #$80,CRGSEL ; enable PLL, keep SYSCLK running in wait mode,
; keep RTI, COP, PLL & core running in wait modemovb #$60,PLLCTL ; disable clock monitor, enable PLL, set automatic
; bandwidth control, disable RTI & COP in pseudo stop
Phase Locked Loop Example 6.3
• Example 6.3 There is a system that uses a 4 MHz crystal oscillator to derive a 24 MHz bus clock. Write an instruction sequence to perform the required configuration.– Solution:
• The OSCCLK and PLLCLK frequencies are 4 MHz and 48 MHz, respectively.
– The XCLKS pin must be pulled to high to select external crystal to generate clock signals
• 48 MHz = 2 4 MHz [SYNR + 1] /[REFDV + 1] • One solution is to set SYNR and REFDV to 5 and 0, respectively.

ECE 4510/5530
97
CRG and PLL Status
CRG Block User Guide V02.07, Doc. Number S12CRGV2/D
• RTIF — Real Time Interrupt Flag– 1 = RTI time-out has occurred.– 0 = RTI time-out has not yet occurred.
• PORF — Power on Reset Flag– 1 = Power on reset has occurred.– 0 = Power on reset has not occurred.
• LOCKIF — PLL Lock Interrupt Flag– 1 = LOCK bit has changed.– 0 = No change in LOCK bit.
• LOCK — Lock Status Bit– 1 = PLL VCO is within the desired tolerance of the target frequency.– 0 = PLL VCO is not within the desired tolerance of the target frequency.

ECE 4510/5530
98
CRG and PLL Status
• TRACK — Track Status Bit– 1 = Tracking mode status.– 0 = Acquisition mode status.
• SCMIF — Self Clock Mode Interrupt Flag– 1 = SCM bit has changed.– 0 = No change in SCM bit.
• SCM — Self Clock Mode Status Bit– 1 = MCU is operating in Self Clock Mode with OSCCLK in an unknown state. All clocks are derived from
PLLCLK running at its minimum frequency fSCM.– 0 = MCU is operating normally with OSCCLK available.
CRG Block User Guide V02.07, Doc. Number S12CRGV2/D

ECE 4510/5530
99
Clock Monitor
• The clock monitor circuit is based on an internal resistor-capacitor (RC) time delay so that it can operate without any MCU clocks. – If no OSCCLK edges are detected within this RC time delay, the clock
monitor indicates failure which asserts self clock mode or generates a system reset depending on the state of SCME bit.
– If the clock monitor is disabled or the presence of clocks is detected no failure is indicated.
• The clock monitor function is enabled/disabled by the CME control bit. (PLLCTL)– If no OSCCLK edges are detected within the RC time delay, the clock
monitor may reset the MCU if the CME bit in the PLLCTL register is set to 1.
– The SCME bit of the PLLCTL register must be cleared to 0 for clock monitor to work.

ECE 4510/5530
100
Real-time interrupt (RTI) (1 of 3)
• The RTI can be used to generate a hardware interrupt at a fixed periodic rate. If enabled (by setting RTIE=1), this interrupt will occur at the rate selected by the RTICTL ($003B) register. – The RTI runs with a gated OSCCLK. At the end of the RTI time-out
period the RTIF flag is set to one and a new RTI time-out period starts immediately.
• A write to the RTICTL register restarts the RTI time-out period.– If the PRE bit is set, the RTI will continue to run in Pseudo-Stop Mode.
(in PLLCTL)
• The RTI interrupt is enabled by the interrupt enable register (CRGINT).

ECE 4510/5530
101
RTI Counter Chain
CRG Block User Guide V02.07, Doc. Number S12CRGV2/D
102112122132142152162
161 to
Note: OSCCLK not SYSCLK and not E-Clock

ECE 4510/5530
102
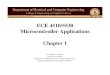
RTI Control Register (RTICTL)
• RTR[6:4] — Real Time Interrupt Prescale Rate Select Bits– These bits select the prescale rate for the RTI. See Table 3-2.
• RTR[3:0] — Real Time Interrupt Modulus Counter Select Bits– These bits select the modulus counter target value to provide additional
granularity
CRG Block User Guide V02.07, Doc. Number S12CRGV2/D
Addr: $003B

ECE 4510/5530
103
RTI RatesTable 6.4 RTI interrupt period (in units of OSCCLK cycle)
RTR[3:0] RTR[6:4]000(off)
001(210)
010(211)
011(212)
100(213)
101(214)
110(215)
111(216)
0000 (1)0001(2)0010 (3)0011 (4)0100 (5)0101 (6)0110 (7)0111 (8)1000 (9)1001 (10)1010 (11)1011 (12)1100 (13)1101 (14)1110 (15)1111 (16)
off*off*off*off*off*off*off*off*off*off*off*off*off*off*off*off*
210
2210
3210
4210
5210
6210
7210
8210
9210
10210
11210
12210
13210
14210
15210
16210
211
2211
3211
4211
5211
6211
7211
8211
9211
10211
11211
12211
13211
14211
15211
16211
212
2212
3212
4212
5212
6212
7212
8212
9212
10212
11212
12212
13212
14212
15212
16212
213
2213
3213
4213
5213
6213
7213
8213
9213
10213
11213
12213
13213
14213
15213
16213
214
2214
3214
4214
5214
6214
7214
8214
9214
10214
11214
12214
13214
14214
15214
16214
215
2215
3215
4215
5215
6215
7215
8215
9215
10215
11215
12215
13215
14215
15215
16215
216
2216
3216
4216
5216
6216
7216
8216
9216
10216
11216
12216
13216
14216
15216
16216

ECE 4510/5530
104
CRG Interrupt Enable Register (CRGINT)
• RTIE — Real Time Interrupt Enable Bit.– 1 = Interrupt will be requested whenever RTIF is set.– 0 = Interrupt requests from RTI are disabled.
• LOCKIE — Lock Interrupt Enable Bit– 1 = Interrupt will be requested whenever LOCKIF is set.– 0 = LOCK interrupt requests are disabled.
• SCMIE — Self Clock Mode Interrupt Enable Bit– 1 = Interrupt will be requested whenever SCMIF is set.– 0 = SCM interrupt requests are disabled.
CRG Block User Guide V02.07, Doc. Number S12CRGV2/D
Addr: $0038

ECE 4510/5530
105
Initialize RTI Code (1)
.area prog(abs)RTICTL = $003B ;RTICTL register addressCRGINT = $0038 ;CRGINT register addressRTIIV = $3E70 ;RTI D-Bug12 Interrupt Vector address
.text_main::
ldx #RTI_isr ;Load start addr of ISRstx RTIIV ;Store in the vector locationldaa #$1F ;RTI Rate is 16 x 2^10 * OSCClock
; OSCclock = 16 MHz (?)staa RTICTL ; approximately 1.024 msec

ECE 4510/5530
106
Initialize RTI Code (2)sei ; set interrupt maskldaa CRGINToraa #$80 ; set the RTIE interruptstaa CRGINT cli ; clear interrupt mask
End: Nop ; infinite loopbra End
.org $1600RTI_isr:
nop ; interrupt routine here…rti

ECE 4510/5530
107
The RTI as a Watchdog Timer
• Important control information:A write to the RTICTL register restarts the RTI time-out period.
• Therefore, for real-time processing, make the RTI time greater than the maximum time that is takes one of the infinite software loops – Include all possible times: loop code, interrupt ISR code and time
• At the end of every loop, re-write the RTICTL register
• If the RTI interrupt occurs, the software broke!– The RTI ISR should be an error recovery routine.

ECE 4510/5530
108
Computer Operating Properly (COP) Circuit
• COP is a free running watchdog timer and allows the user to determine whether the application software operates properly.
– The COP is a timer circuit that will time out if it is not rearmed within a preset time limit.
– The COP will reset the MCU when it times out and the user would know if the software operated properly.
– The time out period of the COP is controlled by the COPCTL register.
• The application software must include an instruction sequence to prevent the COP from timing out when this is enabled.
• To prevent the COP from timing out for applications that uses COP function, write $55 and then $AA into the ARMCOP register.

ECE 4510/5530
109
COP Counter Chain
CRG Block User Guide V02.07, Doc. Number S12CRGV2/D
142
162182
202
222
232
242
Note: OSCCLK not SYSCLK and not E-Clock

ECE 4510/5530
110
COP Control Register (COPCTL)
• WCOP — Window COP Mode Bit– When set, a write to the ARMCOP register must occur in the last 25% of the selected period. A
write during the first 75% of the selected period will reset the part. As long as all writes occur during this window, $55 can be written as often as desired. Once $AA is written after the $55, the time-out logic restarts and the user must wait until the next window before writing to ARMCOP.
– 1 = Window COP operation– 0 = Normal COP operation
• RSBCK — COP and RTI stop in Active BDM mode Bit– 1 = Stops the COP and RTI counters whenever the part is in Active BDM mode.– 0 = Allows the COP and RTI to keep running in Active BDM mode.
• CR[2:0] — COP Watchdog Timer Rate select– These bits select the COP time-out rate. The COP time-out period is OSCCLK period divided
by CR[2:0] value. Writing a nonzero value to CR[2:0] enables the COP counter and starts the time-out period. A COP counter time-out causes a system reset. This can be avoided by periodically (before time-out) reinitializing the COP counter via the ARMCOP register.
CRG Block User Guide V02.07, Doc. Number S12CRGV2/D
Addr: $003C

ECE 4510/5530
111
COP Watchdog Timer Rates
• For a 16 MHz OSCCLK these correspond to approximately:– 1.02 msec– 4.09 msec– 16.4 msec– 65.5 msec– 262 msec– 524 msec– 1049 msec
CRG Block User Guide V02.07, Doc. Number S12CRGV2/D

ECE 4510/5530
112
ARM COP Register
• When the COP is disabled (CR[2:0] = "000") writing to this register has no effect.
• When the COP is enabled by setting CR[2:0] nonzero, the following applies:– Writing any value other than $55 or $AA causes a COP reset. – To restart the COP time-out period you must write $55 followed by a write of $AA.
Other instructions may be executed between these writes but the sequence ($55, $AA) must be completed prior to COP end of time-out period to avoid a COP reset.
– Sequences of $55 writes or sequences of $AA writes are allowed. – When the WCOP bit is set (COPCTL), $55 and $AA writes must be done in the last
25% of the selected time-out period; writing any value in the first 75% of the selected period will cause a COP reset.
CRG Block User Guide V02.07, Doc. Number S12CRGV2/D
Addr: $003F

ECE 4510/5530
113
Initialize COP Code
.area prog(abs)COPCTL = $003C ;COPCTL register addressARMCOP = $003F ;ARMCOP register address
.text_main::
ldaa #$55 ; execute this code t0 insure the staa ARMCOP ; COP is reset to start ldaa #$AA ; the COP timeoutstaa ARMCOPldaa #$07 ;COP Period is 2^24 / OSCClock
; OSCclock = 48 MHzstaa COPCTL ; approximately 349 msec
; the COP is running, so be careful

ECE 4510/5530
114
Running COP CodeMainLoop: ; infinite loop
….….
ldaa #$55 ; execute this code once per loopstaa ARMCOP ; the loop should take longer than ldaa #$AA ; the COP timeoutstaa ARMCOP
bra MainLoop
Note: The COP Interrupt Vector ($FFFA,$FFFB) is not supported by D-Bug12, Therefore, using the COP may cause your code to return control to D-Bug12, but I haven’t tried it!

ECE 4510/5530
115
Lower Power Mode
• It is desirable to minimize power consumption when the MCU is not busy performing useful operations.
• The execution of the WAI instruction places the HCS12 MCU in wait mode and reduces power consumption significantly.– In wait mode, CPU clocks are stopped, but clock signals for peripheral
functions continue to run.
• The CPU leaves the wait mode when one of more of the following events occur:– Maskable interrupts that are not disabled.– Nonmaskable interrupts– Resets
• Reset is not the best way to get out of wait state because it will restart everything and takes longer to resume normal operation.

ECE 4510/5530
116
Stop-Standby Mode
• Stop mode is entered when the MCU executes the STOP instruction. When this instruction is executed, the MCU enters standby mode.– The STOP instruction has no effect if the S flag of the CCR register is 1.
• In stop mode, all clock signals in the MCU are stopped.
• Asserting the RESET, IRQ, or XIRQ signal ends the standby mode.

ECE 4510/5530
117
Resets
• There are four sources of reset:– Power-on (POR) and low-voltage detector (LVD) reset– RESET pin– COP reset– Clock monitor reset

ECE 4510/5530
118
Power-on Reset
• The HCS12 has a circuit to assert reset when the VDD supply to the MCU has reached a certain level.
• The CRG module performs a quality check on the incoming clock signal as soon as a power-on reset is triggered.
• The CRG module will release the reset signal only when the clock check is successful.

ECE 4510/5530
119
IN
GND
RESET
To RESETof HCS12
VDD
MC34064
VDD
4.7
1
3
Figure 6.18 A typical external reset circuit
manual reset
4.7
4.7
2F
External Reset
• The RESET pin allows the user to reset the MCU.
• The MCU can differentiate the external and internal reset signals.
• When the power supply drops to a certain level, it may corrupt the EEPROM.
– It is desirable to have a circuit that can detect this situation and asserts a reset to the MCU.
• The Motorola MC34064 is a chip that can detect low voltage on power supply and reset the CPU.
• An external reset circuit incorporating an MC34064 is shown.

ECE 4510/5530
120
Table 6.5 HCS12 Mode Selection
BKGD MODB MODA Mode
00001111
00110011
01010101
Special single chipSpecial expanded narrow
Special peripheralSpecial expanded wide
Normal single chipNormal expanded narrow
Reserved (forced to peripheral)Normal expanded wide
Port A
general-purpose I/OADDR[15:8]DATA[7:0]ADDR/DATAADDR/DATAGeneral-purpose I/OADDR[15:8]DATA[7:0]--ADDR/DATA
Port B
general-purpose I/OADDR[7:0]ADDR/DATAADDR/DATAGeneral-purpose I/OADDR[7:0]--ADDR/DATA
HCS12 Operation Modes
• The HCS12 can operate in eight different operation modes.• The states of MODC, MODB, and MODA pins are latched
to determine the MCU operation modes.– Expanded modes allow the user to access external memory where
single chip modes do not.– In expanded modes, Port A and B become the time-multiplexed
address and data port.

ECE 4510/5530
121
Timing Example
• Software Loop• RTI Interrupt

ECE 4510/5530
122
End of Chap 6 Material
• And now for an RTI timing example

ECE 4510/5530
123
LED Time Displays
• The hardware module in the lab can implement a Modulo-256 counter that updates the count onto an LED module every 100 ms. The assembly program to implement the Modulo256 counter and the 100 ms delay is given on the following pages.
• Use a microcontroller with a clock oscillator (OSCCLK) of 8.000 MHz, an internal core clock (PLLCLK=SYSCLK) of 48.000 MHz and a bus clock (E-clock) of 24.000 MHz (note that 8.000 x 3/2 = 24.000).

ECE 4510/5530
124
Init., Outer Loop, LED Write.area program(abs)PTT = $0240DDRT = $0242
.text_main::
lds #$3C00ldaa #$FFstaa DDRT ; Set Port T as Output Portldaa #$00staa PTT ; write $00 to Port T
Loop:ldx #$Xcnt ; 2E, Load X register with count
Loop1:ldy #$Ycnt ; 2E, Load Y register with countjsr Delay2msec ; 4E (used inside delay loop)dbne X, Loop1 ; 3E/1Einca ; 1E, Increment Accumulator Astaa PTT ; 2Ebra Loop ; 3E

ECE 4510/5530
125
Outer Loop Timing Estimate
• Assuming a 2 msec subroutine, 50 x 2 msec = 100 msec.• Therefore, assume an Xcnt of 50 and adjust as needed.
• If Xreg=50 and Tinner is 2 msec, what is the error
000,000,24
321121322 reg
reginner
XXTTime
000,000,246
000,000,245
regreginner
XXTTime
sec67.10000,000,24
256000,000,24
6000,000,24
5
regX
Error

ECE 4510/5530
126
Delay 2 msec Code
Delay2msec: ; The jsr is 4E prior to this statementpshy ; 2Epuly ; 3Enop ; 1Enop ; 1Enop ; 1Enop ; 1Edbne Y, Delay2msec ; 3E/1Erts ; 5 E
JSR Loop: loop taken = 2+3+1+1+1+1+3=12, loop not taken = 2+3+1+1+1+1+1 = 10
1000
2_
5101124
RateClockEY
Time reg

ECE 4510/5530
127
Delay 2 msec Computation
• E-Clock Rate is 24,000,000 Hz
1000
2000,000,24
5101124
regY
Time
000,2421000
000,000,2425112
regY
000,412
000,2421
regY
999,3regY
sec208sec2
000,000,245112
nmY
Time reg

ECE 4510/5530
128
Combining Inner and Outer(to achieve 100 msec delay)
• Combining with Yreg=3999 and Xreg=50
000,000,24
5112 reg
inner
YT
000,000,24
6000,000,24
5000,000,24
5112
reg
regreg X
XY
Time
000,000,246
000,000,245
regreginner
XXTTime
000,000,24
6000,000,24112
regreg XYTime
sec250000,000,4
1000,000,24
6 nError

ECE 4510/5530
129
Using the Real-time interrupt (RTI)
• The RTI can be used to generate a hardware interrupt at a fixed periodic rate. If enabled (by setting RTIE=1), this interrupt will occur at the rate selected by the RTICTL register. – The RTI runs with a gated OSCCLK. At the end of the RTI time-out
period the RTIF flag is set to one and a new RTI time-out period starts immediately.
– If the PRE bit is set, the RTI will continue to run in Pseudo-Stop Mode. (in PLLCTL)
• A write to the RTICTL register restarts the RTI time-out period.
• The RTI interrupt is enabled by the interrupt enable register (CRGINT).

ECE 4510/5530
130
RTI Counter Chain
CRG Block User Guide V02.07, Doc. Number S12CRGV2/D
102112122132142152162
161 to
Note: OSCCLK not SYSCLK and not E-Clock

ECE 4510/5530
131
Replacing with an RTI
• Determine the interrupt vector to be set.– $3E70 from D-Bug12 on next page
• Initialize the appropriate peripheral registers– RTICTL
• Write the ISR– Coding with functional modifications
• Enable the interrupts prior to the main programming loop– SEI– CRGINT– CLI

ECE 4510/5530
132
D-Bug12 RAM Based Interrupts
• Figure 4 shows the correspondence between the interrupt source and the two byte RAM interrupt vector. – SCIO will be ignored,
it is used by D-Bug12
• Use these addresses instead of those previously presented …
From: Reference Guide For D–Bug12 Version 4.x.x

ECE 4510/5530
133
RTI Count
• Determine the required count to generate 2 msec.– OSCCLK=16.000 MHz
000,12
000,000,16
Count000,32Count
Use 1 and 2^15 (actual 2.048 msec)
Count 16000
RTR(3:0) log2 Ceil(log2) RTI Count error Floor(log2) RTI Count error1 16000.00 13.97 14 16384 -2% 13 8192 49%2 8000.00 12.97 13 16384 -2% 12 8192 49%3 5333.33 12.38 13 24576 -54% 12 12288 23%4 4000.00 11.97 12 16384 -2% 11 8192 49%5 3200.00 11.64 12 20480 -28% 11 10240 36%6 2666.67 11.38 12 24576 -54% 11 12288 23%7 2285.71 11.16 12 28672 -79% 11 14336 10%8 2000.00 10.97 11 16384 -2% 10 8192 49%9 1777.78 10.80 11 18432 -15% 10 9216 42%
10 1600.00 10.64 11 20480 -28% 10 10240 36%11 1454.55 10.51 11 22528 -41% 10 11264 30%12 1333.33 10.38 11 24576 -54% 10 12288 23%13 1230.77 10.27 11 26624 -66% 10 13312 17%14 1142.86 10.16 11 28672 -79% 10 14336 10%15 1066.67 10.06 11 30720 -92% 10 15360 4%16 1000.00 9.97 10 16384 -2% 9 8192 49%

ECE 4510/5530
134
RTI RatesTable 6.4 RTI interrupt period (in units of OSCCLK cycle)
RTR[3:0] RTR[6:4]000(off)
001(210)
010(211)
011(212)
100(213)
101(214)
110(215)
111(216)
0000 (1)0001(2)0010 (3)0011 (4)0100 (5)0101 (6)0110 (7)0111 (8)1000 (9)1001 (10)1010 (11)1011 (12)1100 (13)1101 (14)1110 (15)1111 (16)
off*off*off*off*off*off*off*off*off*off*off*off*off*off*off*off*
210
2210
3210
4210
5210
6210
7210
8210
9210
10210
11210
12210
13210
14210
15210
16210
211
2211
3211
4211
5211
6211
7211
8211
9211
10211
11211
12211
13211
14211
15211
16211
212
2212
3212
4212
5212
6212
7212
8212
9212
10212
11212
12212
13212
14212
15212
16212
213
2213
3213
4213
5213
6213
7213
8213
9213
10213
11213
12213
13213
14213
15213
16213
214
2214
3214
4214
5214
6214
7214
8214
9214
10214
11214
12214
13214
14214
15214
16214
215
2215
3215
4215
5215
6215
7215
8215
9215
10215
11215
12215
13215
14215
15215
16215
216
2216
3216
4216
5216
6216
7216
8216
9216
10216
11216
12216
13216
14216
15216
16216

ECE 4510/5530
135
RTI Control Register (RTICTL)
• RTR[6:4] — Real Time Interrupt Prescale Rate Select Bits– These bits select the prescale rate for the RTI. See Table 3-2.
• RTR[3:0] — Real Time Interrupt Modulus Counter Select Bits– These bits select the modulus counter target value to provide additional
granularity• Therefore, for RTICTL with 1 and 2^15
– 1 RTR[3:0] = 0000– 2^14 RTR[6:4] = 110– RTICTL = 0 110 0000 = $60
CRG Block User Guide V02.07, Doc. Number S12CRGV2/D

ECE 4510/5530
136
CRG Interrupt Enable Register (CRGINT)
CRG Block User Guide V02.07, Doc. Number S12CRGV2/D
• RTIE — Real Time Interrupt Enable Bit.– 1 = Interrupt will be requested whenever RTIF is set.– 0 = Interrupt requests from RTI are disabled.
• LOCKIE — Lock Interrupt Enable Bit– 1 = Interrupt will be requested whenever LOCKIF is set.– 0 = LOCK interrupt requests are disabled.
• SCMIE — Self Clock Mode Interrupt Enable Bit– 1 = Interrupt will be requested whenever SCMIF is set.– 0 = SCM interrupt requests are disabled.
• RTI Interrupt Enable - CRGINT Register– CRGINT = 1 00 0 00 0 0 = $80

ECE 4510/5530
137
RTI Timer Code (1).area prog(abs)PTT = $0240 ; Port address for Port TDDRT = $0242 ; DDR for Port TCRGFLG = $0037 ; Register addressCRGINT = $0038 ; Register addressRTICTL = $003B ; Register addressXcount = 50 ; Outer Loop Count value.org 1100OuterCount: .byte Xcount ; global outer loop count addressLedValue .byte 0 ; global value of the LED.text_main::
ldx #RTI_isr ;Load start address of ISRstx $3E70 ;Store in the RTI vector locationldaa #$FF ;set Port T as output portstaa DDRTldaa LedValue ; set the initial LED valuestaa PTTldaa #$60 ;set RTICTLstaa RTICTLsei ; set interrupt mask (redundant)ldaa CRGINToraa #$80 ; set the RTIE interruptstaa CRGINT cli ; clear interrupt mask (global int enable)

ECE 4510/5530
138
Main Loop and ISR Code (2)
mainloop: nop ; provide some instructions that can be interruptednopbra mainloop
.org $1500RTI_isr:
lda CRGFLG ; The RTI Int Flag must be resetoraa #$80 ; Writing a 1 to bit 7 resets RTIFstaa CRGFLG ;lda OuterCount ; Load outer count valuedeca ; decriment the counterbeq LedChange ; change the LEDstaa OuterCount ; save the new count valuerti ; return from interrupt
LedChange :lda #Xcount ; restore outer loop countstaa OuterCount ; save the new count valuelda LedValue ; load the current LED byteinca ; increment staa LedValue ; store the new LED value to memorystaa PTT ; write the new LED value to the LEDsrti ; return from interrupt