Embed Size (px)
Citation preview

ECE 4750 Computer Architecture, Fall 2014
T02 FSM Processors
School of Electrical and Computer EngineeringCornell University
revision: 2014-09-10-14-15
1 Finite-State-Machine Processors 2
2 Implementing FSM Control Units 13
2.1. Hardwired FSMs . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2. Horizontally Microcoded FSM . . . . . . . . . . . . . . . . 15
2.3. Vertically Microcoded FSM . . . . . . . . . . . . . . . . . . 17
3 Analyzing Processor Performance 18
4 Case Study: Transition from CISC to RISC 20
1
1 Finite-State-Machine Processors
1. Finite-State-Machine Processors
TimeProgram
=Instructions
Program× Cycles
Instruction× Time
Cycles
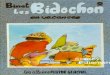
• Instructions / program depends on source code, compiler, ISA• Cycles / instruction (CPI) depends on ISA, microarchitecture• Time / cycle depends upon microarchitecture and implementation
Microarchitecture CPI Cycle Time
Topic 01 Single-Cycle Processor 1 longthis topic→ FSM Processor >1 short
Topic 03 Pipelined Processor ≈1 short
Technology Constraints
• Assume legacy technologywhere logic is expensive, sowe want to minimize thenumber of registers andcombinational logic
• Assume an (unrealistic)combinational memory
• Assume multi-ported registerfiles and memories are tooexpensive, these structurescan only have a singleread/write port
Control Status
Control Unit
Datapath
mreqval
mreqop
mrespdata
<1 cyclecombinational
Memory
regfile
mreqaddr
mreqdata
2
1 Finite-State-Machine Processors
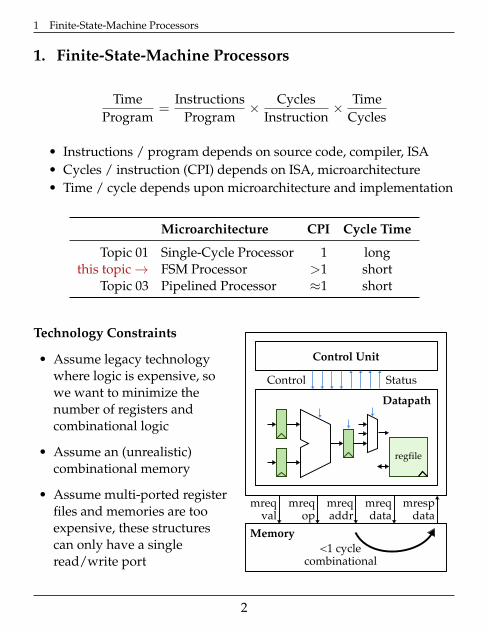
High-Level Idea for FSM Processors
addu addiu mul lw sw j jal jr bne
F Fetch Instr
D Decode Instr
R Read Regs
A Arithmetic
M Access Mem
W Write Reg
U Update PC
F D A M WU R
lw
F D A WU R
addu
F D A MU R
sw
F DU
j
F D A M WU R
lw
F D A WU R
addu
F D A MU R
sw
F DU
j
3

1 Finite-State-Machine Processors
Implementing Fetch Sequence
PC IR
ir_enpc_en
Dat
apat
h B
us
pc_bus_en
A
a_en
+4
alu_bus_en
mrespdata
mreqaddr
RD
rd_bus_en
To control unit
F0
F1
F2
(pseudo-control-signal syntax)
4

1 Finite-State-Machine Processors
Implementing ADDU Instruction
PC IR
ir_enpc_en
Dat
apat
h B
us
pc_bus_en
A
a_en
+4
alu_bus_en
mrespdata
mreqaddr
RD
rd_bus_en
To control unit
B
b_en
RFrf_wen
rf_bus_en
alu_func
alu func
A + 4
A + B
alu
rf_addr_sel
rsrtrd
F0
F1
F2
A0
A1
A2
(pseudo-control-signal syntax)
5

1 Finite-State-Machine Processors
Implementing ADDIU Instruction
PC IR
ir_enpc_en
Dat
apat
h B
us
pc_bus_en
A
a_en
+4
alu_bus_en
mrespdata
mreqaddr
RD
rd_bus_en
To control unit
B
b_en
RFrf_wen
rf_bus_en
alu_func
alu func
A + 4
A + B
alu
rf_addr_sel
rsrtrd
sextimm
iau_bus_en
F0
F1
F2
A0
A1
A2
AI0
AI1
AI2
(pseudo-control-signal syntax)
6

1 Finite-State-Machine Processors
Full Datapath for PARCv1 FSM Processor
PC IR
ir_enpc_en
Dat
apat
h B
us
pc_bus_en
A
a_en
+4
alu_bus_en
mrespdata
mreqaddr
RD
rd_bus_en
To control unit
B
b_en
RFrf_wen
rf_bus_en
alu_func
alu func
A + 4
A + B
alu
rf_addr_sel
rsrtrd
sextimm
iau_bus_en
>>
b_sel
>>C
c_selc_en
A +? B mreqdata
WD
wd_en
iau_func
A jt B
iau func
IR.sext_imm
IR.target_sll2
iau31
IR.sext_imm_sll2
alu_bus_en
eq
MUL Instruction Pseudo-Control-Assembly Fragment
F0
F1
F2
A0
A1
A2
AI0
AI1
AI2
M0
M1
M2
M34
M3
M0: A <- RF[0]M1: B <- RF[rs]M2: C <- RF[rt]M3: A <- A +? B;
B <- B << 1; C <- C >> 1M4: A <- A +? B;
B <- B << 1; C <- C >> 1...
M35: R[rd] <- A +? B;B <- B << 1; C <- C >> 1goto F0
7

1 Finite-State-Machine Processors
LW Instruction Pseudo-Control-Assembly Fragment
F0
F1
F2
A0
A1
A2
AI0
AI1
AI2
M0
M1
M2
M34
M3
L0
L1
L2
L3
L0: A <- RF[rs]L1: B <- IR.sext_immL2: mreq_addr <- A + BL3: R[rt] <- MRD; goto F0
SW Instruction Pseudo-Control-Assembly Fragment
F0
F1
F2
A0
A1
A2
AI0
AI1
AI2
M0
M1
M2
M34
M3
L0
L1
L2
L3
S0
S1
S2
S3
S0: WD <- RF[rt]S1: A <- RF[rs]S2: B <- IR.sext_immS3: mreq_addr <- A + B;
goto F0
8

1 Finite-State-Machine Processors
J Instruction Pseudo-Control-Assembly Fragment
F0
F1
F2
A0
A1
A2
AI0
AI1
AI2
M0
M1
M2
M34
M3
L0
L1
L2
L3
S0
S1
S2
S3
J0
J1
J0: B <- IR.target_sll2J1: PC <- A jt B; goto F0
JAL Instruction Pseudo-Control-Assembly Fragment
F0
F1
F2
A0
A1
A2
AI0
AI1
AI2
M0
M1
M2
M34
M3
L0
L1
L2
L3
S0
S1
S2
S3
J0
J1
JA0
JA1
JA2
JA0: R[31] <- PCJA1: B <- IR.target_sll2JA2: PC <- A jt B; goto F0
9

1 Finite-State-Machine Processors
JR Instruction Pseudo-Control-Assembly Fragment
F0
F1
F2
A0
A1
A2
AI0
AI1
AI2
M0
M1
M2
M34
M3
L0
L1
L2
L3
S0
S1
S2
S3
J0
J1
JA0
JA1
JA2
JR0
JR0: PC <- R[rs]; goto F0
BNE Instruction Pseudo-Control-Assembly Fragment
F0
F1
F2
A0
A1
A2
AI0
AI1
AI2
M0
M1
M2
M34
M3
L0
L1
L2
L3
S0
S1
S2
S3
J0
J1
JA0
JA1
JA2
JR0 B0
B1
B2
B3
B4
B0: A <- R[rs]B1: B <- R[rt]B2: A <- IR.sext_imm_sll2;
goto F0 if A == BB3: B <- PCB4: PC <- A + B; goto F0
10

1 Finite-State-Machine Processors
Adding a Complex Instruction
FSM processors simplify adding complex instructions, since new instruc-tions usually do not require datapath modifications, only additional states.
addu.mm rd, rs, rt
M[ R[rd] ]←M[ R[rs] ] + M[ R[rt] ]
PC IR
ir_enpc_en
Dat
apat
h B
us
pc_bus_en
A
a_en
+4
alu_bus_en
mrespdata
mreqaddr
RD
rd_bus_en
To control unit
B
b_en
RFrf_wen
rf_bus_en
alu_func
alu func
A + 4
A + B
alu
rf_addr_sel
rsrtrd
sextimm
iau_bus_en
>>
b_sel
>>C
c_selc_en
A +? B mreqdata
WD
wd_en
iau_func
A jt B
iau func
IR.sext_imm
IR.target_sll2
iau31
IR.sext_imm_sll2
alu_bus_en
eq
11

1 Finite-State-Machine Processors
Adding a New Auto-Incrementing Load Instruction
Implement the following auto-incrementing load instruction using pseudo-control-sign syntax. Modify the datapath if necessary.
lw.ai rt, imm(rs)
R[rt]←M[ R[rs] + sext(imm) ]; R[rs]← R[rs] + 4
PC IR
ir_enpc_en
Dat
apat
h B
us
pc_bus_en
A
a_en
+4
alu_bus_en
mrespdata
mreqaddr
RD
rd_bus_en
To control unit
B
b_en
RFrf_wen
rf_bus_en
alu_func
alu func
A + 4
A + B
alu
rf_addr_sel
rsrtrd
sextimm
iau_bus_en
>>
b_sel
>>C
c_selc_en
A +? B mreqdata
WD
wd_en
iau_func
A jt B
iau func
IR.sext_imm
IR.target_sll2
iau31
IR.sext_imm_sll2
alu_bus_en
eq
12

2 Implementing FSM Control Units
2. Implementing FSM Control Units
F0
F1
F2
A0
A1
A2
AI0
AI1
AI2
M0
M1
M2
M34
M3
L0
L1
L2
L3
S0
S1
S2
S3
J0
J1
JA0
JA1
JA2
JR0 B0
B1
B2
B3
B4
We will study three techniquesfor implementing FSM controlunits:
• Hardwired control units arehigh-performance, butinflexible
• Horizontal µcodingincreases flexibility, requireslarge control store
• Vertical µcoding is anintermediate design point
2.1. Hardwired FSMs
State
ControlSignalLogic
StateTransition
Logic
Control Signals(22)
Status Signals(1)
13

2 Implementing FSM Control Units 2.1. Hardwired FSMs
Control signal output table for hardwired control unit
PC IR
ir_enpc_en
Dat
apat
h B
us
pc_bus_en
A
a_en
+4
alu_bus_en
mrespdata
mreqaddr
RD
rd_bus_en
To control unit
B
b_en
RFrf_wen
rf_bus_en
alu_func
alu func
A + 4
A + B
alu
rf_addr_sel
rsrtrd
sextimm
iau_bus_en
>>
b_sel
>>C
c_selc_en
A +? B mreqdata
WD
wd_en
iau_func
A jt B
iau func
IR.sext_imm
IR.target_sll2
iau31
IR.sext_imm_sll2
alu_bus_en
eq
F0: mreq_addr <- PC; A <- PC
F1: IR <- RD
F2: PC <- A + 4; A <- A + 4
goto inst
A0: A <- RF[rs]
A1: B <- RF[rt]
A2: R[rd] <- A + B
goto F0
Bus Enables Register Enables Mux Func RF MReq
state PC IAU ALU RF RD PC IR A B C WD A B IAU ALU sel wen val op
14

2 Implementing FSM Control Units 2.2. Horizontally Microcoded FSM
2.2. Horizontally Microcoded FSM
• Use memory array (called the control store) instead of random logicto encode both the control signal logic and the state transition logic
• Enables a more systematic approach to implementing complexmulti-cycle instructions
• Microcoding can produce good performance if accessing the controlstore is much faster than accessing main memory
• Read-only control stores might be replaceable enabling in-fieldupdates, while read-write control stores can simplify diagnosticsand microcode patches
15

2 Implementing FSM Control Units 2.2. Horizontally Microcoded FSM
Handling micro-control flow with horizontal microcoding
F0
F1
F2
A0
A1
A2
AI0
AI1
AI2
index csigs (22b) next state (2b)
00
01
10
11
index csigs (22b) next state (3b)
0000
0001
0010
0011
0100
0101
0110
0111
1000
1001
1010
1011
1100
1101
1110
1111
16

2 Implementing FSM Control Units 2.3. Vertically Microcoded FSM
2.3. Vertically Microcoded FSM
• Horizontal microcode has wider micro-instructions
– Multiple parallel operations per micro-instruction– Fewer microcode steps per macroinstruction– Sparser encoding = more bits, but less decoding logic
• Vertical microcode has narrower micro-instructions
– Typically a single datapath operation per micro-instruction– More microcode steps per macroinstruction– More compact = less bits, but more decoding logic
17
3 Analyzing Processor Performance
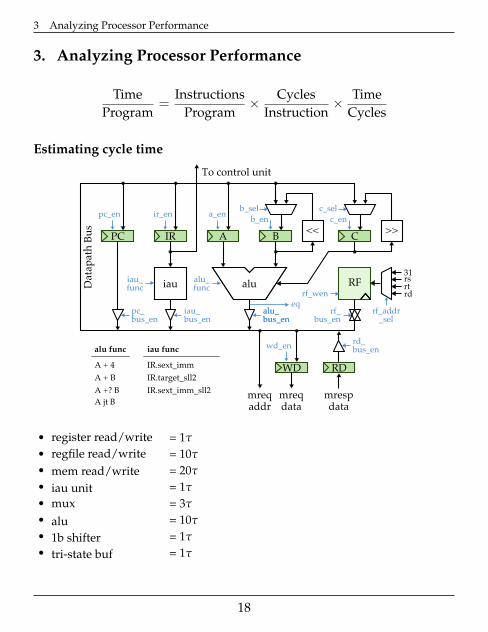
3. Analyzing Processor Performance
TimeProgram
=Instructions
Program× Cycles
Instruction× Time
Cycles
Estimating cycle time
PC IR
ir_enpc_en
Dat
apat
h B
us
pc_bus_en
A
a_en
+4
alu_bus_en
mrespdata
mreqaddr
RD
rd_bus_en
To control unit
B
b_en
RFrf_wen
rf_bus_en
alu_func
alu func
A + 4
A + B
alu
rf_addr_sel
rsrtrd
sextimm
iau_bus_en
>>
b_sel
>>C
c_selc_en
A +? B mreqdata
WD
wd_en
iau_func
A jt B
iau func
IR.sext_imm
IR.target_sll2
iau31
IR.sext_imm_sll2
alu_bus_en
eq
• register read/write = 1τ
• regfile read/write = 10τ
• mem read/write = 20τ
• iau unit = 1τ
• mux = 3τ
• alu = 10τ
• 1b shifter = 1τ
• tri-state buf = 1τ
18

3 Analyzing Processor Performance
Estimating execution time
Using our first-order equation for processor performance, how long inns will it take to execute the vvadd example assuming n is 64?
loop:lw r12, 0(r4)lw r13, 0(r5)addu r14, r12, r13sw r14, 0(r6)addiu r4, r4, 4addiu r5, r5, 4addiu r6, r6, 4addiu r7, r7, -1bne r7, r0, loopjr r31
Using our first-order equation for processor performance, how long inns will it take to execute the mystery program assuming n is 64 and thatwe find a match on the 10th element.
addiu r12, r0, 0loop:lw r13, 0(r4)bne r13, r6, fooaddiu r2, r12, 0jr r31
foo:addiu r4, r4, 4addiu r12, r12, 1bne r12, r5, loopaddiu r2, r0, -1jr r31
19

4 Case Study: Transition from CISC to RISC
4. Case Study: Transition from CISC to RISC
• Microcoding thrived in the 1970’s
– ROMs significantly faster than DRAMs– For complex instruction sets, microcode was cheaper and simpler– New instructions supported without modifying datapath– Fixing bugs in controller is easier– ISA compatibility across models relatively straight-forward
— Maurice Wilkes, 1954
20

4 Case Study: Transition from CISC to RISC
IBM 360 Microprogramming
M30 M40 M50 M65
Datapath width (bits) 8 16 32 64µinst width (bits) 50 52 85 87µcode size (1K µinsts) 4 4 2.75 2.75µstore technology CCROS TCROS BCROS BCROSµstore cycle (ns) 750 625 500 200Memory cycle (ns) 1500 2500 2000 750Rental fee ($K/month) 4 7 15 35
TROS = transformer read-only storage (magnetic storage)BCROS = balanced capacitor read-only storage (capacitive storage)
CCROS = card capacitor read-only storage (metal punch cards, replace in field)
Only the fastest models (75,95) were hardwired
IBM 360/M30 microprogram for register-register logical OR
OR
Fetch first byteof operands
Instruction Fetch
Writeback Result
Prepare for Next Byte
21

4 Case Study: Transition from CISC to RISC
IBM 360/M30 microprogram for register-register binary ADD
Analyzing Microcoded Machines
• John Cocke and group at IBM
– Working on a simple pipelined processor, 801, and advanced compilers
– Ported experimental PL8 compiler to IBM 370, and only used simpleregister-register and load/store instructions similar to 801
– Code ran faster than other existing compilers that used all 370instructions! (up to 6 MIPS, whereas 2 MIPS considered good before)
• Joel Emer and Douglas Clark at DEC
– Measured VAX-11/780 using external hardware– Found it was actually a 0.5 MIPS machine, not a 1 MIPS machine– 20% of VAX instrs = 60% of µcode, but only 0.2% of the dynamic execution
• VAX 8800, high-end VAX in 1984
– Control store: 16K×147b RAM, Unified Cache: 64K×8b RAM– 4.5×more microstore RAM than cache RAM!
22

4 Case Study: Transition from CISC to RISC
From CISC to RISC
• Key changes in technology constraints
– Logic, RAM, ROM all implemented with MOS transistors– RAM ≈ same speed as ROM
• Use fast RAM to build fast instruction cache of user-visibleinstructions, not fixed hardware microfragments
– Change contents of fast instruction memory to fit what app needs
• Use simple ISA to enable hardwired pipelined implementation
– Most compiled code only used a few of CISC instructions– Simpler encoding allowed pipelined implementations– Load/Store Reg-Reg ISA as opposed to Mem-Mem ISA
• Further benefit with integration
– Early 1980’s→ fit 32-bit datapath, small caches on single chip– No chip crossing in common case allows faster operation
μPC
ROM for
μInst
Small
Decoder
User PC
RAM for
Instr Cache
"Larger"
Decoder
Vertical μCode
ControllerRISC
Controller
23
4 Case Study: Transition from CISC to RISC
Ratio of
MIPS
to
VAX
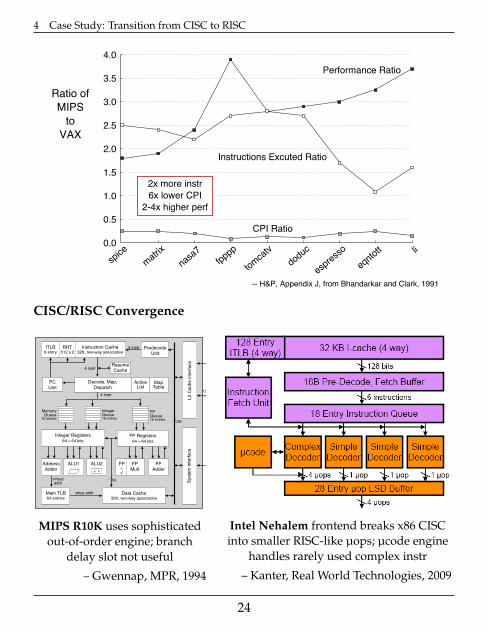
-- H&P, Appendix J, from Bhandarkar and Clark, 1991
Performance Ratio
Instructions Excuted Ratio
CPI Ratio
4.0
3.5
3.0
2.5
2.0
1.5
1.0
0.5
0.0
spice
matri
x
nasa7
fpppp
tom
catv
doduc
espre
sso
eqntott li
2x more instr
6x lower CPI
2-4x higher perf
CISC/RISC Convergence
by Linley Gwennap
Not to be left out in the move to thenext generation of RISC, MIPS Tech-nologies (MTI) unveiled the design ofthe R10000, also known as T5. As thespiritual successor to the R4000, thenew design will be the basis of high-end
MIPS processors for some time, at least until 1997. Byswapping superpipelining for an aggressively out-of-order superscalar design, the R10000 has the potentialto deliver high performance throughout that period.
The new processor uses deep queues decouple theinstruction fetch logic from the execution units. Instruc-tions that are ready to execute can jump ahead of thosewaiting for operands, increasing the utilization of the ex-ecution units. This technique, known as out-of-order ex-ecution, has been used in PowerPC processors for sometime (see 081402.PDF ), but the new MIPS design is themost aggressive implementation yet, allowing more in-structions to be queued than any of its competitors.
Taking advantage of its experience with the 200-MHz R4400, MTI was able to streamline the design andexpects it to run at a high clock rate. Speaking at theMicroprocessor Forum, MTI’s Chris Rowen said that thefirst R10000 processors will reach a speed of 200 MHz,50% faster than the PowerPC 620. At this speed, he ex-pects performance in excess of 300 SPECint92 and 600SPECfp92, challenging Digital’s 21164 for the perfor-mance lead. Due to schedule slips, however, the R10000has not yet taped out; we do not expect volume ship-ments until 4Q95, by which time Digital may enhancethe performance of its processor.
Speculative Execution Beyond BranchesThe front end of the processor is responsible for
maintaining a continuous flow of instructions into thequeues, despite problems caused by branches and cachemisses. As Figure 1 shows, the chip uses a two-way set-associative instruction cache of 32K. Like other highlysuperscalar designs, the R10000 predecodes instructionsas they are loaded into this cache, which holds four extra
bits per instruction. These bits reducethe time needed to determine the ap-propriate queue for each instruction.
The processor fetches four instruc-tions per cycle from the cache and de-codes them. If a branch is discovered, itis immediately predicted; if it is pre-dicted taken, the target address is sentto the instruction cache, redirecting thefetch stream. Because of the one cycleneeded to decode the branch, takenbranches create a “bubble” in the fetchstream; the deep queues, however, gen-erally prevent this bubble from delay-ing the execution pipeline.
The sequential instructions thatare loaded during this extra cycle arenot discarded but are saved in a “re-sume” cache. If the branch is later de-termined to have been mispredicted, thesequential instructions are reloadedfrom the resume cache, reducing themispredicted branch penalty by onecycle. The resume cache has four entriesof four instructions each, allowing spec-ulative execution beyond four branches.
The R10000 design uses the stan-dard two-bit Smith method to predict
M I C R O P R O C E S S O R R E P O R T
MIPS R10000 Uses Decoupled Architecture Vol. 8, No. 14, October 24, 1994 © 1994 MicroDesign Resources
MIPS R10000 Uses Decoupled ArchitectureHigh-Performance Core Will Drive MIPS High-End for Years
1 9 9 4
FORUMMICROPROCESSOR
Figure 1. The R10000 uses deep instruction queues to decouple the instruction fetch logicfrom the five function units.
Instruction Cache32K, two-way associative
PC
Unit
Predecode
Unit
ITLB8 entry
Decode, Map,
DispatchActive
ListMapTable
Main TLB64 entries
ALU1
Data Cache32K, two-way associative
FP
Adder
4 instr
4 instr
4 instr
MemoryQueue
16 entries
IntegerQueue16 entries
FPQueue16 entries
ALU2 FP
Mult÷!
FP÷"
virtualaddr
phys addr
64
DataSRAM
128
512K-16M
Avala
nche B
us (
64 b
it a
ddr/
data
)
L2 C
ache Inte
rface
128
Syste
m Inte
rface
TagSRAM
BHT512 x 2
Resume
Cache
Address
Adder
Integer Registers64 ! 64 bits
FP Registers64 ! 64 bits
MIPS R10K uses sophisticatedout-of-order engine; branch
delay slot not useful
– Gwennap, MPR, 1994
Intel Nehalem frontend breaks x86 CISCinto smaller RISC-like µops; µcode engine
handles rarely used complex instr
– Kanter, Real World Technologies, 2009
24

4 Case Study: Transition from CISC to RISC
Microprogamming Today
• Microprogramming is far from extinct
• Played a crucial role in microprocessors of the 1980s(DEC VAX, Motorola 68K series, Intel 386/486)
• Microprogramming plays assisting role in many modern processors(AMD Phenom, Intel Nehalem, Intel Atom, IBM Z196)
– 761 Z196 instructions executed with hardwired control– 219 Z196 “complex” instructions always executed with microcode– 24 Z196 instructions conditionally executed with microcode
• Patchable microcode common for post-fabrication bug fixes (Intelprocessors load µcode patches at bootup)
25