Embed Size (px)
Citation preview
University of Louisville Instructor Dr. Aly A. Farag
Electrical and Computer Engineering Summer 2009
EC
E 6
00: In
tro
duct
ion
to
Sh
ape
An
alys
is L
ab #
4 –
Co
nvex
Hull in
2D
1
ECE 600: Introduction to Shape Analysis
Lab #4 – Convex Hull in 2D
(Assigned Thursday 6/11/09 – Due Thursday 6/18/09)
In this lab, we will discuss the details of computing convex hull using Graham's algorithm, refer to lecture
notes for more theoretical details. We start with data structures, then tackle the sorting step, and finally
present the code.
Table of Contents Table of Code Snippets ................................................................................................................................ 1
1. Data Representation ................................................................................................................................ 3
2. Sorting ........................................................................................................................................................ 6
2.1 FindLowest. ................................................................................................................................... 6
2.2 Sorting Relation ............................................................................................................................. 7
2.3 Slopes .............................................................................................................................................. 7
2.4 Using Left Predicate ..................................................................................................................... 8
2.5 Compare ......................................................................................................................................... 8
2.6 QuickSort ..................................................................................................................................... 10
3. Graham Algorithm ................................................................................................................................ 14
Task 12: ........................................................................................................................................... 18
Table of Code Snippets
Code 1 - Vertex2D class after modification to compute the convex hull ................................................. 3
Code 2 – Stack functions added Vertex2D class .......................................................................................... 5
Code 3 – Example how to use stack data structure ...................................................................................... 5
Code 4 - FindLowest function ......................................................................................................................... 6
ECE 600 - Su 09; Dr. Farag

University of Louisville Instructor Dr. Aly A. Farag
Electrical and Computer Engineering Summer 2009
EC
E 6
00: In
tro
duct
ion
to
Sh
ape
An
alys
is L
ab #
4 –
Co
nvex
Hull in
2D
2
Code 5 – Swap function .................................................................................................................................... 6
Code 6 - Compare function .............................................................................................................................. 8
Code 7 - QuickSort function .......................................................................................................................... 13
Code 8 - Partition function, Version 2 ......................................................................................................... 14
ECE 600 - Su 09; Dr. Farag
University of Louisville Instructor Dr. Aly A. Farag
Electrical and Computer Engineering Summer 2009
EC
E 6
00: In
tro
duct
ion
to
Sh
ape
An
alys
is L
ab #
4 –
Co
nvex
Hull in
2D
3
1. Data Representation
As usual, we have a choice between storing the points in an array or a list. We choose in this
instance to use an array, anticipating using a sorting routine that expects its data in a contiguous
section of memory. Each point will be represented by a structure paralleling that used for vertices in
polygon triangulation lab, i.e. Vertex2D, however it will be modified to serve the purpose of convex
hull computation.
The points are stored in an array (rather than a linked list) called P with P(1),P(1),...,P(n)
corresponding to 𝑝0, 𝑝1, … , 𝑝𝑛−1, note that Matlab arrays are one-based indexed. Each P(i) is a
structure with fields for its coordinates, a unique identifying number, vertexID, and a flag to mark
deletion, isDeleted, such member will be added to the Vertex2D class.
Thus, we are given an array of points P, where P(i) is of type Vertex2D, and optimally we are
required to extract from them the following:
(1) All points on the hull in arbitrary order (array of points subset of P can be used)
(2) The extreme points in arbitrary order (array of points subset of P can be used)
(3) All the points on the hull in boundary traversal order ( a linked list containing such
(4) The extreme points in boundary traversal order
Where an array of points which is subset of P is sufficient to represent the first two outputs, while a
linked list structure can be used to represented the last two outputs to maintain the boundary
traversal order. See Code 1 to see the modification done for Vertex2D class.
Code 1 - Vertex2D class after modification to compute the convex hull
classdef Vertex2D < handle
% in this class we will define the basic building block of a polygon
properties
vertexID % index or id number assigned to the current vertex
% which reveals its order within the polygon
point % point coordinates for this vertex
% members used for polygon triangulation, i.e. if Vertex2D is
% used as a linked list of vertices to define the
% boundary of a polygon
isEar % ear status, true if this vertex is an ear
isAdded = 0 % a flag to indicate whether this vertex is
% added to the vertex list of the polygon or not
index_in_vertexList = 0;
% members used for convex hull computation (Graham's Algorithm)
isDeleted % a flag which mark point deletion
% members used to used Vertex2D as a node in either a linked list
% or a stack
ECE 600 - Su 09; Dr. Farag
University of Louisville Instructor Dr. Aly A. Farag
Electrical and Computer Engineering Summer 2009
EC
E 6
00: In
tro
duct
ion
to
Sh
ape
An
alys
is L
ab #
4 –
Co
nvex
Hull in
2D
4
next % next vertex
prev % previous vertex
end
methods
%% constructor,
% take care to modify the constructor to add the added
% member (isDeleted)
%% get/set access methods
% don’t forget to add a set and get access function for isDeleted
%% disp function
% modify the function to display isDeleted
end
end
Now, throughout the computation of the convex hull of the given set of points P, we need to
maintain a stack of so-far added points to the convex hull boundary. In Lab 3 we have implemented
Vertex2D as a doubly linked list to represent a polygon, however to compute the convex hull, we
need to view it as a stack, hence we will add some functionalities on Vertex2D class to enable using
it as a node in a stack.
Conceptually, a stack is simple: a data structure that allows adding and removing elements in a
particular order. Every time an element is added, it goes on the top of the stack; the only element
that can be removed is the element that was at the top of the stack. Consequently, a stack is said to
have "first in last out" behavior (or "last in, first out"). The first item added to a stack will be the last
item removed from a stack.
Stacks have some useful terminology associated with them:
1. Push To add an element to the stack, such element will be the head/top of the stack, hence
this addition can be thought of inserting a node at the end of a linked list.
2. Pop To remove an element from the stack, this element is the last one, hence moving the
head/top of the stack one step down, thus this removal can be thought of deleting the last
node from a linked list.
3. Peek To look at (traverse) elements in the stack without removing them
4. LIFO Refers to the last in, first out behavior of the stack
5. FILO Equivalent to LIFO
Thus, the stack is most naturally represented by a singly linked list of cells, each of which "contains"
a vertex, such that we always have the access to the top of the stack which is the last element being
pushed in such a single linked list. See Code 2 for the functions added to Vertex2D class to allowing
the implementation of stack functions.
ECE 600 - Su 09; Dr. Farag
University of Louisville Instructor Dr. Aly A. Farag
Electrical and Computer Engineering Summer 2009
EC
E 6
00: In
tro
duct
ion
to
Sh
ape
An
alys
is L
ab #
4 –
Co
nvex
Hull in
2D
5
Code 2 – Stack functions added Vertex2D class
%% functions related to stack implementation
function stackTop = Push(stackTop,newNode)
newNode.insertAfter(stackTop);
stackTop = newNode;
end
function [stackTop, popedNode] = Pop(stackTop)
popedNode = Vertex2D(stackTop.vertexID,stackTop.point);
stackTop = stackTop.prev;
stackTop.next = [];
end
function Peek(stackTop)
% loop backward from the stacktop till the first element being
% pushed and display node info
while(1)
disp(stackTop);
% termination condition
if isempty(stackTop.prev)
break
end
stackTop = stackTop.prev;
end
end
See Code 3 for an example how to use the stack
Code 3 – Example how to use stack data structure
% test stack
x = [0 10 12 20 13 10 12 14 8 6 10 7 0 1 3 5 -2 5];
y = [0 7 3 8 17 12 14 9 10 14 15 18 16 13 15 8 9 5];
% let's fill a stack of vertices for the previous coordinates
% the first point will be the starting head/top of the stack
starting_point = Point2D(x(1),y(1));
stackTop = Vertex2D(0,starting_point);
for i = 2 : length(x)
curPoint = Point2D(x(i),y(i));
curVertex = Vertex2D(i-1,curPoint);
stackTop = stackTop.Push(curVertex);
end
% go over the stack element and display node information without removing
% them
stackTop.Peek();
ECE 600 - Su 09; Dr. Farag
University of Louisville Instructor Dr. Aly A. Farag
Electrical and Computer Engineering Summer 2009
EC
E 6
00: In
tro
duct
ion
to
Sh
ape
An
alys
is L
ab #
4 –
Co
nvex
Hull in
2D
6
% remove the last pushed node in the stack
stackTop = stackTop.Pop();
2. Sorting
2.1 FindLowest.
We first start with the easiest aspect of the sorting step: finding the rightmost lowest point in the set.
The function FindLowest (Code 4) accomplishes this and swaps the point into P(1) (note that
Matlab arrays are one-based indexed). The straightforward Swap is shown in Code 5. Note that
these functions are utility functions hence they are not included in any class definition.
Code 4 - FindLowest function
function P = FindLowest(P)
% this function finds the rightmost lowest point in a given array of vertices
each of type Vertex2D.
% this function accomplishes this and swaps the point into P(0).
lowestIndex = 1;
lowestPoint = P(lowestIndex).point;
for i = 2 : length(P)
curPoint = P(i).point;
if (curPoint.y < lowestPoint.y) || ...
((curPoint.y == lowestPoint.y)&&(curPoint.x > lowestPoint.x))
lowestIndex = i;
lowestPoint = P(lowestIndex).point;
end
end
P = Swap(P,1,lowestIndex);
Code 5 – Swap function
function P = Swap(P,i,j)
% this function will swap array element at index i with array element at
% index j and return the array P after swap has been occured
tempElement = P(i);
P(i) = P(j);
P(j) = tempElement;
ECE 600 - Su 09; Dr. Farag
University of Louisville Instructor Dr. Aly A. Farag
Electrical and Computer Engineering Summer 2009
EC
E 6
00: In
tro
duct
ion
to
Sh
ape
An
alys
is L
ab #
4 –
Co
nvex
Hull in
2D
7
2.2 Sorting Relation
The sorting step seems straightforward, but there are hidden pitfalls if we want to guarantee an
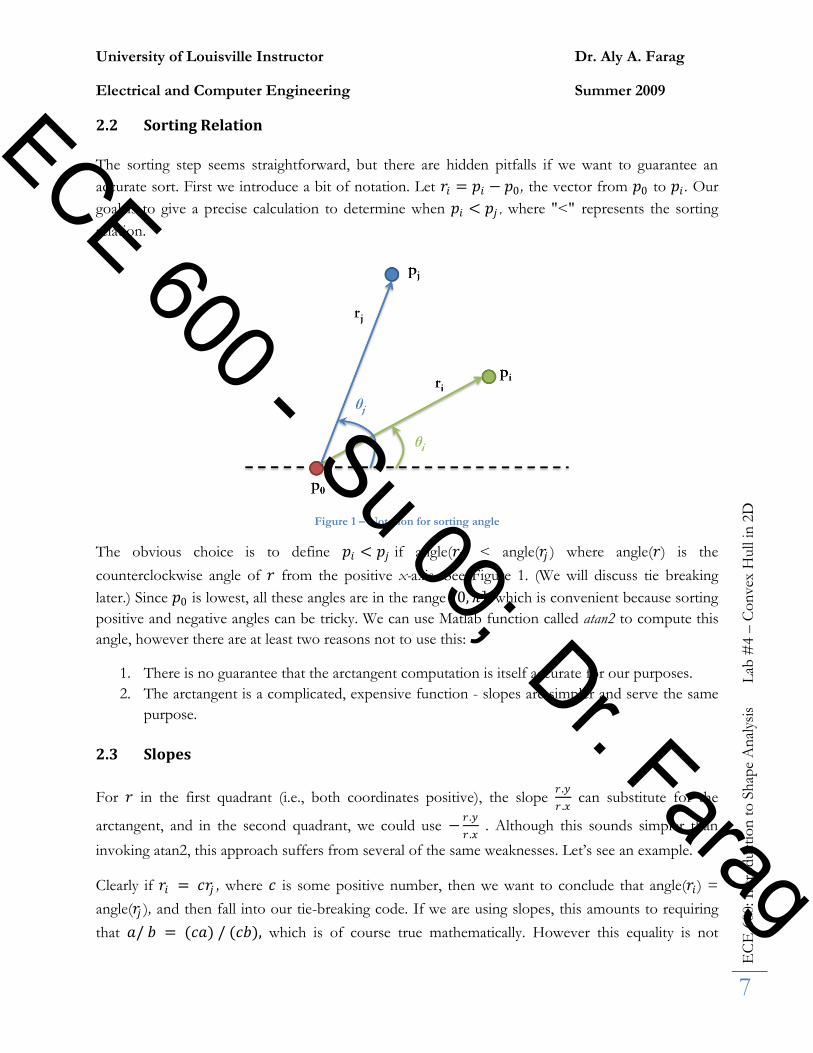
accurate sort. First we introduce a bit of notation. Let 𝑟𝑖 = 𝑝𝑖 − 𝑝0, the vector from 𝑝0 to 𝑝𝑖 . Our
goal is to give a precise calculation to determine when 𝑝𝑖 < 𝑝𝑗 , where "<" represents the sorting
relation.
Figure 1 – Notation for sorting angle
The obvious choice is to define 𝑝𝑖 < 𝑝𝑗 if angle(𝑟𝑖) < angle(𝑟𝑗 ) where angle(𝑟) is the
counterclockwise angle of 𝑟 from the positive x-axis. See Figure 1. (We will discuss tie breaking
later.) Since 𝑝0 is lowest, all these angles are in the range (0, 𝜋], which is convenient because sorting
positive and negative angles can be tricky. We can use Matlab function called atan2 to compute this
angle, however there are at least two reasons not to use this:
1. There is no guarantee that the arctangent computation is itself accurate for our purposes.
2. The arctangent is a complicated, expensive function - slopes are simpler and serve the same
purpose.
2.3 Slopes
For 𝑟 in the first quadrant (i.e., both coordinates positive), the slope 𝑟 .𝑦
𝑟 .𝑥 can substitute for the
arctangent, and in the second quadrant, we could use −𝑟 .𝑦
𝑟 .𝑥 . Although this sounds simpler than
invoking atan2, this approach suffers from several of the same weaknesses. Let’s see an example.
Clearly if 𝑟𝑖 = 𝑐𝑟𝑗 , where 𝑐 is some positive number, then we want to conclude that angle(𝑟𝑖) =
angle(𝑟𝑗 ), and then fall into our tie-breaking code. If we are using slopes, this amounts to requiring
that 𝑎/ 𝑏 = (𝑐𝑎) / (𝑐𝑏), which is of course true mathematically. However this equality is not
ECE 600 - Su 09; Dr. Farag
University of Louisville Instructor Dr. Aly A. Farag
Electrical and Computer Engineering Summer 2009
EC
E 6
00: In
tro
duct
ion
to
Sh
ape
An
alys
is
L
ab #
4 –
Co
nvex
Hull in
2D
8
guaranteed to hold for floating-point division. It depends on the machine. Some machines performs
division by reciprocating and multiplying, and the two operations sometimes lead to small errors.
2.4 Using Left Predicate
The solution is already in hand: the Left predicate, the function to determine whether a point is left
of a line determined by two other points, is precisely what we need to compare 𝑟𝑖 and 𝑟𝑗 .
Recall that Left was itself a simple test on the value of getTriangleArea, which computes the signed
area of the triangle determined by three points. We will use this area function rather than Left, as it
is then easier to distinguish ties.
2.5 Compare
Now, given two points, 𝑝𝑖 and 𝑝𝑗 , we want to compare them, i.e. 𝑝𝑖 < 𝑝𝑗 ? with respect to 𝑝0. If 𝑝𝑗
is on the left of the directed line 𝑝0𝑝𝑖 , then 𝑝𝑖 < 𝑝𝑗 , i.e. 𝑝𝑖 < 𝑝𝑗 if 𝑎𝑟𝑒𝑎 𝑝0, 𝑝𝑖 , 𝑝𝑗 > 0, hence -1 is
returned to indicate less than. When the area is zero, we fall into a sorting collinearity. To decide
which point is closer to 𝑝0, we can avoid computing the distance by noting that if 𝑝𝑖 is closer, then
𝑟𝑖 = 𝑝𝑖 − 𝑝0 projects to a shorter length than does 𝑟𝑗 = 𝑝𝑗 − 𝑝0 . If 𝑝𝑖 is closer, we mark it for later
deletion, if 𝑝𝑗 is closer, mark it instead. If 𝑝𝑖 = 𝑝𝑗 then we mark the one with lower index for later
deletion (which one we choose to delete does not matter, however consistency is needed). In all
cases, either -1, 0 or 1 is returned according to the angular sorting rule. For implementation issues, it
was found that it is preferred to separate the comparison code (Code 6) from the part related to
marking a point for deletion (Code 7), where the later is called after sorting the vertices.
Code 6 - Compare function
function decision = compare(p0,pi,pj)
% this function compares pi and pj with respect to p0 using the angular
% sorting rule
% getting the area of the triangle of vertices po,pi and pj
A = area(p0,pi,pj);
if A > 0
decision = -1; % less than
else if A < 0
decision = 1; % greater than
else
% points are collinear with p0
% compute the projections of ri = pi-po and rj = pj-po
x = abs(pi.point.x - p0.point.x) - abs(pj.point.x - p0.point.x);
y = abs(pi.point.y - p0.point.y) - abs(pj.point.y - p0.point.y);
if (x<0)||(y<0)
ECE 600 - Su 09; Dr. Farag
University of Louisville Instructor Dr. Aly A. Farag
Electrical and Computer Engineering Summer 2009
EC
E 6
00: In
tro
duct
ion
to
Sh
ape
An
alys
is L
ab #
4 –
Co
nvex
Hull in
2D
9
decision = -1;
else if (x>0) || (y>0)
decision = 1;
else
% points are coincident
decision = 0;
end
end
end
end
Code 7 - markDeletion function
function P = markDeletion(P)
% this function indicate whether each vertex in the array P should be
% deleted or not (this is after sorting)
p0 = P(1);
for i = 2 : length(P)-1
pi = P(i);
pj = P(i+1);
% getting the area of the triangle of vertices po,pi and pj
A = area(p0,pi,pj);
if A == 0
% points are collinear with p0
% compute the projections of ri = pi-po and rj = pj-po
x = abs(pi.point.x - p0.point.x) - abs(pj.point.x - p0.point.x);
y = abs(pi.point.y - p0.point.y) - abs(pj.point.y - p0.point.y);
if (x<0)||(y<0)
P(i).isDeleted = 1;
else if (x>0) || (y>0)
P(i+1).isDeleted = 1;
else
% points are coincident
if pi.vertexID > pj.vertexID
P(i+1).isDeleted = 1;
else
P(i).isDeleted = 1;
end
end
end
end
end
Now, we will discuss the overall sorting method which employs the compare function.
ECE 600 - Su 09; Dr. Farag
University of Louisville Instructor Dr. Aly A. Farag
Electrical and Computer Engineering Summer 2009
EC
E 6
00: In
tro
duct
ion
to
Sh
ape
An
alys
is L
ab #
4 –
Co
nvex
Hull in
2D
10
2.6 QuickSort
QuickSort is a well-known sorting algorithm that on average makes 𝑂(𝑛 log 𝑛) comparisons to sort
𝑛 elements. However, in the worst case, it makes 𝑂(𝑛2) comparisons. Quicksort sorts by employing
a divide and conquer strategy to divide a list into two sub-lists.
The steps are:
(1) Pick an element, called a pivot, from the list.
(2) Reorder the list so that all elements which are less than the pivot come before the pivot and
all elements greater than the pivot come after it (equal values can go either way). After this
partitioning, the pivot is in its final position. This is called the partition operation.
(3) Recursively sort the sub-list of lesser elements and the sub-list of greater elements.
The base case of the recursion is lists of size zero or one, which are always sorted.
Algorithm: QuickSort
function quicksort(array) variables: less, greater if length(array) ≤ 1 return array Select and remove a pivot value pivot from array for each x in array if x ≤ pivot then append x to less else append x to greater return concatenate(quicksort(less), pivot, quicksort(greater))
ECE 600 - Su 09; Dr. Farag
University of Louisville Instructor Dr. Aly A. Farag
Electrical and Computer Engineering Summer 2009
EC
E 6
00: In
tro
duct
ion
to
Sh
ape
An
alys
is L
ab #
4 –
Co
nvex
Hull in
2D
11
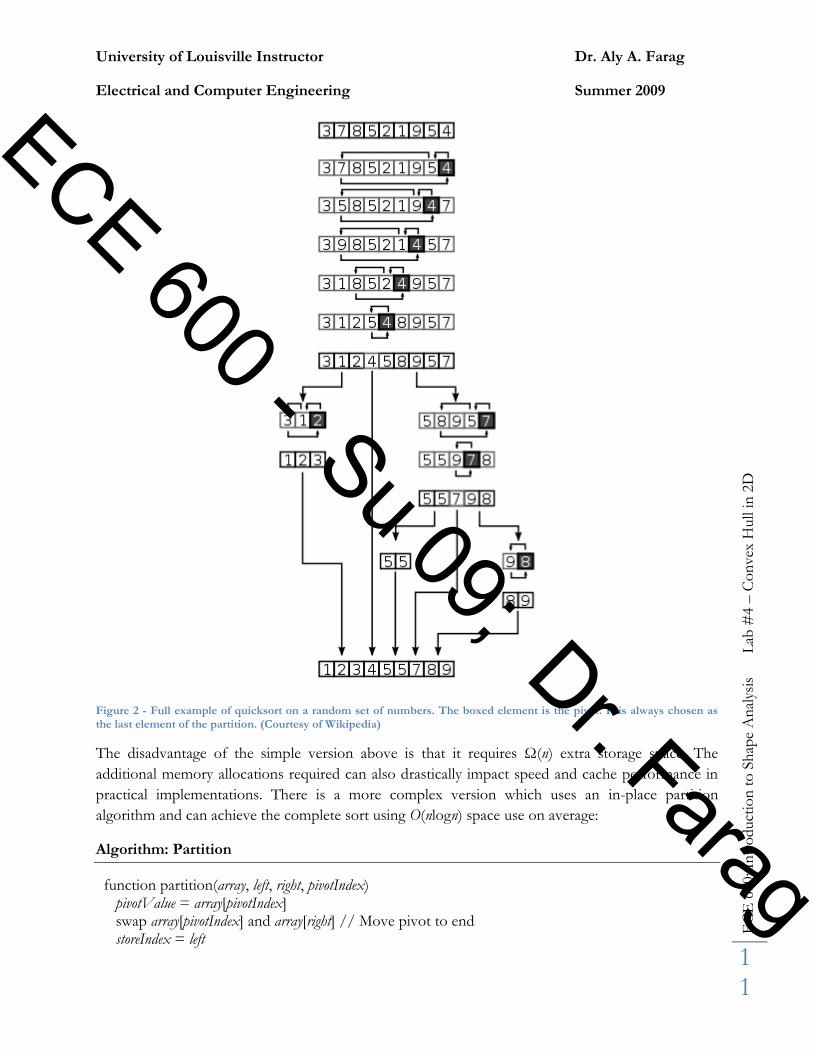
Figure 2 - Full example of quicksort on a random set of numbers. The boxed element is the pivot. It is always chosen as the last element of the partition. (Courtesy of Wikipedia)
The disadvantage of the simple version above is that it requires Ω(n) extra storage space. The
additional memory allocations required can also drastically impact speed and cache performance in
practical implementations. There is a more complex version which uses an in-place partition
algorithm and can achieve the complete sort using O(nlogn) space use on average:
Algorithm: Partition
function partition(array, left, right, pivotIndex) pivotValue = array[pivotIndex] swap array[pivotIndex] and array[right] // Move pivot to end storeIndex = left
ECE 600 - Su 09; Dr. Farag
University of Louisville Instructor Dr. Aly A. Farag
Electrical and Computer Engineering Summer 2009
EC
E 6
00: In
tro
duct
ion
to
Sh
ape
An
alys
is L
ab #
4 –
Co
nvex
Hull in
2D
12
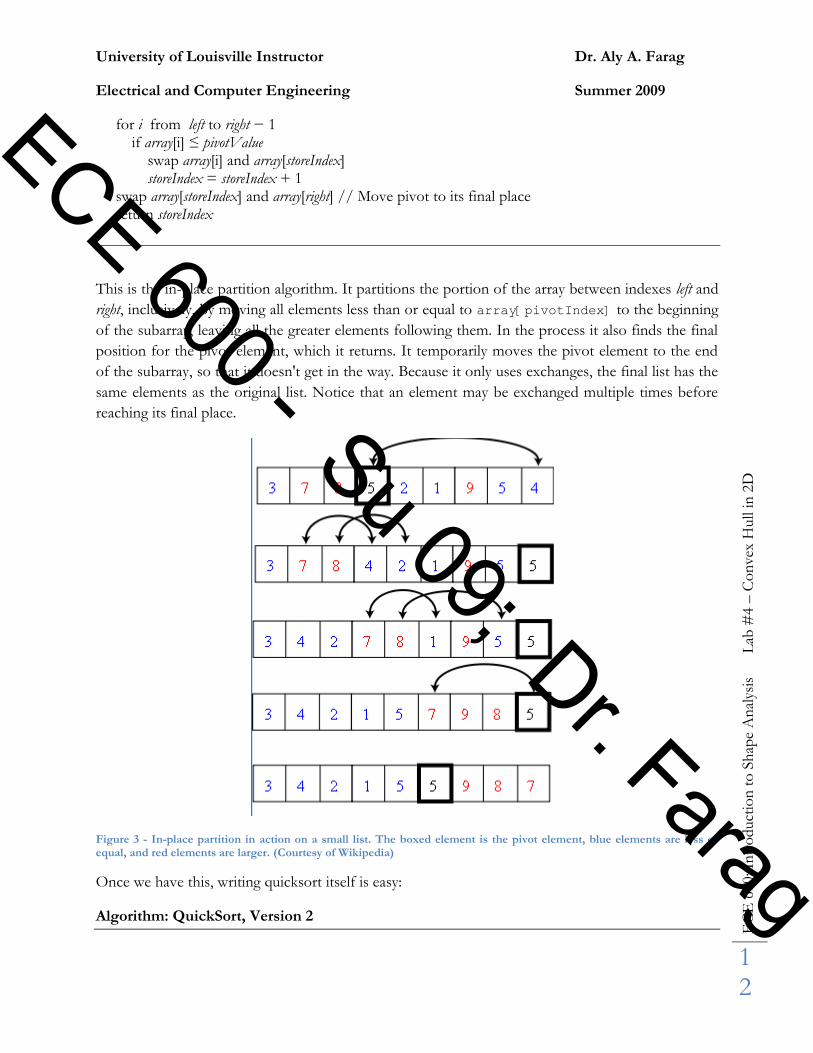
for i from left to right − 1 if array[i] ≤ pivotValue swap array[i] and array[storeIndex] storeIndex = storeIndex + 1 swap array[storeIndex] and array[right] // Move pivot to its final place return storeIndex
This is the in-place partition algorithm. It partitions the portion of the array between indexes left and
right, inclusively, by moving all elements less than or equal to array[pivotIndex] to the beginning
of the subarray, leaving all the greater elements following them. In the process it also finds the final
position for the pivot element, which it returns. It temporarily moves the pivot element to the end
of the subarray, so that it doesn't get in the way. Because it only uses exchanges, the final list has the
same elements as the original list. Notice that an element may be exchanged multiple times before
reaching its final place.
Figure 3 - In-place partition in action on a small list. The boxed element is the pivot element, blue elements are less or equal, and red elements are larger. (Courtesy of Wikipedia)
Once we have this, writing quicksort itself is easy:
Algorithm: QuickSort, Version 2
ECE 600 - Su 09; Dr. Farag
University of Louisville Instructor Dr. Aly A. Farag
Electrical and Computer Engineering Summer 2009
EC
E 6
00: In
tro
duct
ion
to
Sh
ape
An
alys
is L
ab #
4 –
Co
nvex
Hull in
2D
13
function quicksort(array, left, right) if right > left select a pivot index (e.g. pivotIndex = left) pivotNewIndex = partition(array, left, right, pivotIndex) quicksort(array, left, pivotNewIndex - 1) quicksort(array, pivotNewIndex + 1, right)
See Code 8 for the direct implementation of the preceding algorithm to quicksort an array of
numbers.
Code 8 - QuickSort function
function P = quicksort(P,leftIndex,rightIndex)
% this function will sort the given array of vertices (with P(1) being the
% rightmost lowest point) according to the angle compute counterclockwise,
% this function will use the compare function implemented to compare pi
% with pj with respect to p0, which uses the area function instead of
% actually find such counterclockwise angle which is error prone.
if leftIndex >= rightIndex
return
end
[P,index] = partition(P,leftIndex,rightIndex);
P = quicksort(P,leftIndex,index-1);
P = quicksort(P,index+1,rightIndex);
function [P,index] = partition(P,leftIndex,rightIndex)
% Partition the array into two halves and return the
% index about which the array is partitioned
% Makes the leftmost element a good pivot
pivotIndex = leftIndex;
pivotValue = P(pivotIndex);
index = leftIndex;
P = Swap(P,pivotIndex,rightIndex);
for i = leftIndex : rightIndex
if P(i) < pivotValue
P = Swap(P,i,index);
index = index + 1;
end
end
P = Swap(P,rightIndex,index);
ECE 600 - Su 09; Dr. Farag
University of Louisville Instructor Dr. Aly A. Farag
Electrical and Computer Engineering Summer 2009
EC
E 6
00: In
tro
duct
ion
to
Sh
ape
An
alys
is L
ab #
4 –
Co
nvex
Hull in
2D
14
Now, we will adapt the preceding code in order to sort an array of given vertices according to the
counterclockwise angle with respect to the rightmost lowest point. See Code 9. Note that the only
part which needs modification is the partition function where comparisons take place.
Code 9 - Partition function, Version 2
function [P,index] = partition(P,leftIndex,rightIndex)
% Partition the array into two halves and return the
% index about which the array is partitioned
% Makes the leftmost element a good pivot
pivotIndex = leftIndex;
%pivotValue = P(pivotIndex);
index = leftIndex;
p0 = P(1);
pj = P(pivotIndex);
P = Swap(P,pivotIndex,rightIndex);
for i = leftIndex : rightIndex
pi = P(i);
decision = compare(p0,pi,pj);
%if P(i) < pivotValue
if decision == -1
P = Swap(P,i,index);
index = index + 1;
end
end
P = Swap(P,rightIndex,index);
3. Graham Algorithm
Having worked out the sorting details, let us move to the top level and discuss the main
functionality of extreme points computation (Code 12). The points are read in, the rightmost lowest
is swapped with P(1) in FindLowest, and P(2) .... , P(n) are sorted by angle with quicksort. The
repeated calls to the compare function mark a number of points for deletion by setting the flag
isDeleted field. The next (easy) task is to delete those points, which we accomplish with a simple
function called Squash (Code 10). This maintains two indices i and j into the points array P, copying
P(i) on top of P(j) for all undeleted points i. After this the most problematic cases are gone and we
can proceed with the Graham scan (Code 11)
Code 10 - Squash function
function newP = Squash(P)
% this function returns those points which are not marked for deletion
% ignoring the rest
n = length(P);
ECE 600 - Su 09; Dr. Farag
University of Louisville Instructor Dr. Aly A. Farag
Electrical and Computer Engineering Summer 2009
EC
E 6
00: In
tro
duct
ion
to
Sh
ape
An
alys
is L
ab #
4 –
Co
nvex
Hull in
2D
15
j = 0;
for i = 1 : n
if ~P(i).isDeleted % if not marked for deletion
j = j +1;
newP(j) = P(i);
end
end
Recall the Graham scan algorithm, which can be summarized using the following pseudocode;
Algorithm: Graham Scan, Version B
Find rightmost lowest point, label it as 𝑝0
Sort all other points angularly about 𝑝0,
In case of tie, delete the point closer to 𝑝0 (or all but one copy for multiple points)
Stack 𝑆 = 𝑝1,𝑝0 = (𝑝𝑡 , 𝑝𝑡−1) ; 𝑡 indexes the top of the stack
Set 𝑖 ← 2
While 𝑖 < 𝑛 do
If 𝑝𝑖 is strictly left of (𝑝𝑡−1, 𝑝𝑡)
Then Push (𝑝𝑖 , 𝑆) and set 𝑖 ← 𝑖 + 1
Else Pop(𝑆)
Code 11 - Graham function
function stackTop = Graham (P)
% this function finds the convex hull points of a given array of
% vertices/points in the boundary traversal order (counterclockwise)
% the convex hull is a stack of vertices whose top is returned by this
% function
% the first point in the convex hull will be p0 which is the lowest
% rightmost point
stackTop = P(1);
% now let's push the second point
stackTop = stackTop.Push(P(2));
% bottom two elements in this stack will not be removed
i = 3;
while i <= length(P)
% top two points in the stack
p1 = stackTop.prev;
p2 = stackTop;
if Left(p1,p2,P(i))
stackTop = stackTop.Push(P(i));
ECE 600 - Su 09; Dr. Farag
University of Louisville Instructor Dr. Aly A. Farag
Electrical and Computer Engineering Summer 2009
EC
E 6
00: In
tro
duct
ion
to
Sh
ape
An
alys
is L
ab #
4 –
Co
nvex
Hull in
2D
16
i = i + 1;
else
stackTop = stackTop.Pop();
end
end
Now the main function will be,
Code 12 - main function
function main
% first, let's get the points
x = [3,3,0,2,-2,-3,6,-3,-5,-5,1,-3,4,5,-5,3,0,0,7];
y = [3,5,1,5,2,2,5,4,2,-1,-2,-2,2,1,1,-2,5,0,4];
figure
xlim([-6 8]);
ylim([-3 6]);
hold on
% let's fill the vertices array
for i = 1 : length(x)
curPoint = Point2D(x(i),y(i));
curPoint.draw('DrawHandle',gca,...
'ColorMarkerStyle','r*:','LineWidth',2);
hold on
text(curPoint.x+0.5,curPoint.y+0.5,num2str(i-1));
P(i) = Vertex2D(i-1,curPoint);
end
% getting the lowest rightmost point in P and placing it in P(1)
P = FindLowest(P);
% sort the points with respect to P(1) using the counterclockwise angle.
P = quicksort(P,1,length(P));
for i = 1 : length(P)
fprintf(' %d',P(i).vertexID);
end
fprintf('\n');
P = markDeletion(P);
for i = 1 : length(P)
fprintf(' %d',P(i).isDeleted);
end
fprintf('\n');
% maintain only vertices which are not marked for deletion
P = Squash(P);
% call the Graham scan algorithm
ECE 600 - Su 09; Dr. Farag
University of Louisville Instructor Dr. Aly A. Farag
Electrical and Computer Engineering Summer 2009
EC
E 6
00: In
tro
duct
ion
to
Sh
ape
An
alys
is L
ab #
4 –
Co
nvex
Hull in
2D
17
stackTop = Graham(P);
% now let's visualize the outputs
while(1)
curPoint = stackTop.point;
curPoint.draw('DrawHandle',gca,...
'ColorMarkerStyle','b*:','LineWidth',2);
hold on
pause(0.5);
% termination condition
if isempty(stackTop.prev)
break
end
stackTop = stackTop.prev;
end
Task 1: Examine the preceding code using the given set of points which include all types of collinearities,
then do the following:
(a) Tabulate the points after angular sorting each with its delete flag and vertex ID.
(b) Tabulate the points after apply the Squash function.
(c) Show the stack (with vertexID’s only) and the value of 𝑖 at the top of the while loop.
(d) Visualize the intermediate results (each pop and push) throughout consecutive iterations.
Task 2: Graham Algorithm is mainly used to obtain the extreme points of a given set of points, with some
minor changes in the given code we can obtain all points on the hull’s boundary with boundary traversal
order, in this task you are required to analyze the given code and indicate these minor changes then develop
another version of this code to obtain points on the hull, experiment your modifications using the given set
of points and report any difficulties/special cases encountered during such modification, in particular when
applied on the given set of point.
Task 3: All points collinear. What will the code output if all input points are collinear?
Task 4: Best case. How many iterations of the scan's while loop (in Graham Algorithm version B)
occur if the input points are all already on the hull?
Task 5: Worst case. Construct a set of points for each n that causes the largest number of iterations of
the while loop of the scan (in Graham Algorithm version B).
Task 6: Graham's algorithm has no obvious extension to three dimensions: It depends crucially on
angular sorting, which has no direct counterpart in three dimensions. In the lecture notes we have
discussed the Incremental Algorithm to compute convex hull, your task is to implement this
algorithm using linked lists to represent points on the hull.
ECE 600 - Su 09; Dr. Farag
University of Louisville Instructor Dr. Aly A. Farag
Electrical and Computer Engineering Summer 2009
EC
E 6
00: In
tro
duct
ion
to
Sh
ape
An
alys
is L
ab #
4 –
Co
nvex
Hull in
2D
18
Task 7: Degenerate tangents. Modify the incremental algorithm as presented to output the correct hull
when a tangent line from p includes an edge of Q. The "correct" hull should not have three collinear
vertices.
Task 8: Collinearities. Modify the incremental algorithm to work with sets of points that may include
three or more collinear points, hint extend task 7.
Task 9: Optimal incremental algorithm. Presort the points by their x coordinate, so that 𝑝 ∉ 𝒬 at each
step. Now try to arrange the search for tangent lines in such a manner that the total work over the
life of the algorithm is O(n). This then provides an O(n logn) algorithm.
Task 10: Write a report to summarize the theoretical background needed for this lab and your experimental
results. Your report should begin with a cover page introducing the project title and group members. It is
important to note that all figure axes should be labeled properly. You are required to submit your MATLAB
codes (fully commented) with a readme file describing your files and how to use them in terms of input and
output.
Good Luck
ECE 600 - Su 09; Dr. Farag
























![[Farag fouda] kebenaran_yang_hilang_sisi_kelam_pr(book_fi.org)](https://img.pdfslide.net/doc/110x75/55cd7ab0bb61ebe3718b4634/farag-fouda-kebenaranyanghilangsisikelamprbookfiorg.jpg)



