Embed Size (px)
Citation preview

ECE317 : Feedback and Control
Lecture :Bode plots
Dr. Richard Tymerski
Dept. of Electrical and Computer Engineering
Portland State University
1

Course roadmap
2
Laplace transform
Transfer function
Block Diagram
Linearization
Models for systems
• electrical
• mechanical
• example system
Modeling Analysis Design
Stability
• Pole locations
• Routh-Hurwitz
Time response
• Transient
• Steady state (error)
Frequency response
• Bode plot
Design specs
Frequency domain
Bode plot
Compensation
Design examples
Matlab & PECS simulations & laboratories

Frequency response (review)
• Steady state output • Frequency is same as the input frequency
• Amplitude is that of input (A) multiplied by
• Phase shifts
• Frequency response function (FRF): G(jw)
• Bode plot: Graphical representation of G(jw)
3
Gain
G(s)
y(t)Stable

Phase shift (review)
4
G(s)

Bode plot of G(jw) (review)
• Bode diagram consists of gain plot & phase plot
5
Log-scale

Sketching Bode plot
• Basic functions• Constant gain
• Differentiator and Integrator
• First order system and its inverse
• Second order system
• Product of basic functions1. Sketch Bode plot of each factor, and
2. Add the Bode plots graphically.
6

Bode plot of a constant gain
7
10-2
10-1
100
101
102
19
19.5
20
20.5
21
10-2
10-1
100
101
102
-1
-0.5
0
0.5
1
(for all)
Old method:

8
𝐻(𝑠) = 𝐴
New method:

Sketching Bode plot
• Basic functions• Constant gain
• Differentiator and Integrator
• First order system and its inverse
• Second order system
• Product of basic functions1. Sketch Bode plot of each factor, and
2. Add the Bode plots graphically.
9

Bode plot of a differentiator
10
10-2
10-1
100
101
102
-40
-20
0
20
40
10-2
10-1
100
101
102
89
89.5
90
90.5
91
Old method:

11
𝐻(𝑠) = 𝐴𝑠
New method:

Bode plot of an integrator
12
10-2
10-1
100
101
102
-40
-20
0
20
40
10-2
10-1
100
101
102
-91
-90.5
-90
-89.5
-89
Mirror image of the
Bode plot of G(s)=s
with respect to w-axis.
Old method:

13
𝐻(𝑠) =𝐴
𝑠
New method:

Sketching Bode plot
• Basic functions• Constant gain
• Differentiator and Integrator
• First order system and its inverse
• Second order system
• Product of basic functions1. Sketch Bode plot of each factor, and
2. Add the Bode plots graphically.
14

10-2
10-1
100
101
102
-50
-40
-30
-20
-10
0
10-2
10-1
100
101
102
-100
-80
-60
-40
-20
0
Bode plot of a 1st order system
15
Corner frequencyStraight-line approximation
Old method:

16
𝐻(𝑠) =𝐴
1 +𝑠𝜔𝑜
New method:

Bode plot of an inverse system
17
Mirror image of the
original Bode plot with
respect to w-axis.10
-210
-110
010
110
20
10
20
30
40
50
10-2
10-1
100
101
102
0
20
40
60
80
100
Old method:

18
Bode plot: Zero at
𝐻(𝑠) = 𝐴 1 +𝑠
𝜔𝑜
𝜔𝑜
New method:

Sketching Bode plot
• Basic functions• Constant gain
• Differentiator and Integrator
• First order system and its inverse
• Second order system
• Product of basic functions1. Sketch Bode plot of each factor, and
2. Add the Bode plots graphically.
19

Bode plot of a 2nd order system
20
10-1
100
101
-60
-40
-20
0
20
10-1
100
101
-200
-150
-100
-50
0
resonance
Resonant freq.
Peak gain
Old method:

21
Bode plot of a 2nd order system
𝐻(𝑠) =𝐴
1 +𝑠
𝑄𝜔𝑜+
𝑠𝜔𝑜
2
𝑄 =1
2𝜍
New method:

Sketching Bode plot
• Basic functions• Constant gain
• Differentiator and Integrator
• First order system and its inverse
• Second order system
• Product of basic functions1. Sketch Bode plot of each factor, and
2. Add the Bode plots graphically.
22
Main advantage of Bode plot!

An advantage of Bode plot
• Bode plot of a series connection G1(s)G2(s) is the addition of each Bode plot of G1 and G2.• Gain
• Phase
• Later, we use this property to design C(s) so that G(s)C(s) has a “desired” shape of Bode plot.
23

Short proofs
• Use polar representation
Then,
Therefore,
24

Example 1
• Sketch the Bode plot of a transfer function
1. Decompose G(s) into a product form:
2. Sketch a Bode plot for each component on the same graph.
3. Add them all on both gain and phase plots.
25

Example 1 (cont’d)
26
dB
deg
-20

Example 2
27
dB
deg
-20

Example 3
28
dB
deg
-20
-40

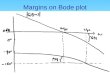
Remark
• You can use MATLAB command “bode” to obtain the precise magnitude and phase responses.
29

Summary
• Sketches of Bode plots • Basic transfer functions
• Products of basic transfer functions
• The new approach to sketching Bode plots is useful:• With simplified annotations we’re able to quickly obtain
good approximations to magnitude and phase values.
• This approach will be particularly useful in the process of compensator design where simplified design expressions will be derived from the sketched plots. (After a design is completed, it may be verified with MATLAB using the exact transfer function expressions).
• Next, practice sketching Bode plots
30