Embed Size (px)
Citation preview

Economic MPC and Real-time Decision Makingwith
Application to Large-Scale HVAC Energy Systems
J.B. Rawlings N.R. Patel M.J. Wenzel R.D. TurneyM.J. Risbeck C.T. Maravelias
FOCAPO/CPC 2017Tucson, Arizona
January 8–12, 2017
FOCAPO/CPC 2017 1 / 34

Outline
1 Stanford Energy System Innovations (SESI) project
2 Expanding the Industrial Scope of Model Predictive ControlDiscrete decisionsIs the control robust?Economic MPC with periodic constraint
3 Conclusions
4 Future Work
FOCAPO/CPC 2017 2 / 34

The $485-million Stanford Energy System Innovations (SESI) project;replaced an aging 50-MW natural-gas-fired cogeneration plant with a newheat-recovery system to provide heating and cooling to the campus.
FOCAPO/CPC 2017 3 / 34
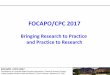
A new 80-megavolt-ampere electrical substation brings electricity from thegrid. Crews also converted 155 campus buildings from steam to hot-waterdistribution and installed a 22-mile-long network of new pipe.
FOCAPO/CPC 2017 4 / 34

The star of the show: three heat-recovery chillers—the largest in theU.S.—that strip waste heat from 155 campus buildings.
FOCAPO/CPC 2017 5 / 34

Johnson Controls developed the Central Energy Plant Optimization Model(CEPOM); the algorithm optimizes a 10-day forecast every 15 minutes,considering campus loads, weather patterns, price of electricity, availableequipment and many other factors.
FOCAPO/CPC 2017 6 / 34

Large-scale commercial application
FOCAPO/CPC 2017 7 / 34

Control Decomposition
High Level
Low-LevelWaterside
AirsideSubsystem
1
AirsideSubsystem
n
AirsideSubsystem
2
WatersidePID
AirsidePID 1
AirsidePID 2
AirsidePID n
· · ·
· · ·
Disturbance Forecasts,Electricity Pricing
Low-LevelAirside
DisturbanceEstimate
CoolingLoad
AggregateSystem Curve
DemandProfile
MeasurementsTemperature
SetpointsMeasurements
EquipmentSetpoints
FOCAPO/CPC 2017 8 / 34

The disturbance forecast: weather and electricity prices
0 1 2 3 4 5 6 722
24
26
28
30
32
34
Am
b.T
emp
.(◦
C)
0 1 2 3 4 5 6 7
Time (days)
0.00
0.03
0.06
0.09
0.12
0.15
Ele
c.pr
ice
($/k
Wh
)
FOCAPO/CPC 2017 9 / 34

High-level problem: Optimal production and averagebuilding temperatures (25 buildings)
0 1 2 3 4 5 6 7−60
−40
−20
0
20
40
60
80
Co
olin
gL
oad
(MW
)
Demand Production Storage Unmet
0 1 2 3 4 5 6 7
Time (days)
20
21
22
23
Avg
.T
emp
.(◦
C)
FOCAPO/CPC 2017 10 / 34

Low level airside: Optimal zone temperatures andsetpoints (20 zones in each of 25 buildings)
0 1 2 3 4 5 6 720.0
20.8
21.6
22.4
Zon
eT
emp
.(◦
C)
0 1 2 3 4 5 6 7
Time (days)
16
18
20
22
Tem
p.
Set
poi
nt
(◦C
)
FOCAPO/CPC 2017 11 / 34

Low level waterside: Production and Gantt chart forcentral plant equipment
0 1 2 3 4 5 6 7−60−40−20
020406080
Co
olin
gL
oad
(MW
) Demand Production Storage Unmet
0 1 2 3 4 5 6 7
Time (days)
Tow
ers
Ch
iller
sP
um
ps
FOCAPO/CPC 2017 12 / 34

Real-time computational requirements
The optimizations were solved using Gurobi 6.0 via Matlab R2016bon a machine with 8GB RAM and 2.66GHz Intel Core 2 QuadProcessor Q8400.
The high-level problem took 35 seconds to solve.
The low-level airside subproblems took about 15 seconds each tosolve.
The low-level waterside subproblem was given two minutes ofcomputation time, after which the incumbent solution (with anoptimality gap of 0.2%) was accepted.
Since control executions occur every 15 minutes, this decompositioncan easily be implemented online.
Solution times can be further decreased by using a horizon shorterthan one week (Risbeck, Maravelias, Rawlings, and Turney, 2016).
FOCAPO/CPC 2017 13 / 34

SESI operation summary
In operation since December 2015 (Wenzel, Turney, and Drees, 2016).
The central plant was run in autonomous mode about 90% of thetime (including time off-line for plant maintenance).
Achieved 10% to 15% additional savings in operating costs comparedto control by the best team of trained human operators (Stagner,2016).
This large-scale implementation demonstrates the significant potentialbenefits to applying model-based optimization to large HVAC systems
FOCAPO/CPC 2017 14 / 34
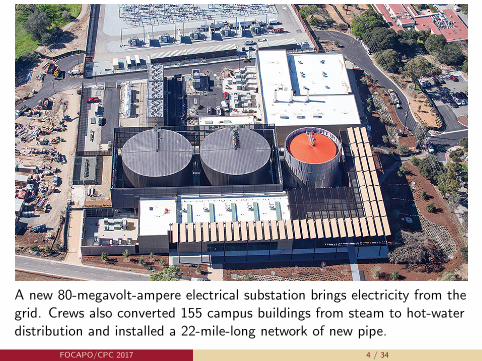
Literature review for multiple problem elements
Buildings
Stochastic MPC for buildingsOldewurtel, Parisio, Jones, Gyalistras, Gwerder,Stauch, Lehmann, and Morari (2012)
Ma, Matusko, and Borrelli (2015)
Scheduling for central plants with TESKapoor, Powell, Cole, Kim, and Edgar (2013)
Scheduling/control for TES and buildings
Mayer, Killian, and Kozek (2015)
Touretzky and Baldea (2016)
Discrete Actuators
Mixed logical dynamical/piecewise affinesystems
Bemporad and Morari (1999)
Lazar, Heemels, Weiland, and Bemporad (2006)
Switched SystemsEl-Farra and Christofides (2003)
Quantization as a disturbanceQuevedo, Goodwin, and De Dona (2004)
Kobayshi and Hiraishi (2013)
Economic MPC
StabilityDiehl, Amrit, and Rawlings (2011)
Ellis, Durand, and Christofides (2014)
Grune and Stieler (2014)
Average PerformanceAngeli, Amrit, and Rawlings (2012)
Muller, Angeli, and Allgower (2014)
Periodic Systems
LinearBohm, Raff, Reble, and Allgower (2009)
Limon, Alamo, de la Pena, Zeilinger, Jones, andPereira (2012)
NonlinearHuang, Harinath, and Biegler (2011)
Zanon, Gros, and Diehl (2013)
Falugi and Mayne (2013)
FOCAPO/CPC 2017 15 / 34

MPC: Supporting theory for this class of problems
Problem 1—stabilizing a steady state
XN
x(0)Xf
κf (·)
Stability Assumption: Vf (f (x , κf (x))) ≤ Vf (x)− `(x , κf (x))
FOCAPO/CPC 2017 16 / 34

Nominal Stability Result—stabilizing a steady state
Denoting the (possibly multivalued) control law as κN(·), closed-loopsystem is
x+ ∈ F (x) := {f (x , u) | u ∈ κN(x)} (1)
Theorem 1 (Exponential stability of (sub)optimal MPC)
The origin of the closed-loop system (1) is exponentially stable on(arbitrarily large) compact subsets of the feasible set XN . (Pannocchia,Rawlings, and Wright, 2011)
∗Feasible set XN is the set of x that can reach Xf within N steps whilemeeting constraints.
FOCAPO/CPC 2017 17 / 34

Problem 1—Extension to discrete actuators
So the first question of interest is how much effort is required toextend all of the existing MPC theory to handle discrete actuators.
The answer, surprisingly, is none. Consider themain assumption about the input feasible set (Rao and Rawlings, 1999)
The set U is compact and contains the origin.
Notice that U is not required to contain the origin in its interior as iscommon in much of the early MPC literature.
Therefore, to treat discrete actuators, we simply change the set U toenforce discreteness in some subset of the actuators.
FOCAPO/CPC 2017 18 / 34

Problem 1—Extension to discrete actuators
So the first question of interest is how much effort is required toextend all of the existing MPC theory to handle discrete actuators.
The answer, surprisingly, is none. Consider themain assumption about the input feasible set (Rao and Rawlings, 1999)
The set U is compact and contains the origin.
Notice that U is not required to contain the origin in its interior as iscommon in much of the early MPC literature.
Therefore, to treat discrete actuators, we simply change the set U toenforce discreteness in some subset of the actuators.
FOCAPO/CPC 2017 18 / 34

Continuous and mixed continuous-discrete actuators
u1
(a)
u2
u1
(b)
u2
Figure 1: Typical input constraint sets U for (a) continuous actuators and (b) mixedcontinuous-discrete actuators; the origin (•) is the equilibrium of interest.
FOCAPO/CPC 2017 19 / 34

Problem 2—Inherent robustness of (sub)optimal MPC
Real systems are affected by disturbances that cause the nominal model tono longer hold
Process errors d lead to model error x+ = f (x , u) + d
Measurement errors e corrupt x estimate to x + e
With disturbances, the closed-loop system becomes
x+ ∈ Fde(x) := {f (x , u) + d | u ∈ κN(x + e)} (2)
Theorem 2 (Robust exponential stability of (sub)optimal MPC)
The origin of the perturbed closed-loop system (2) is robustlyexponentially stable on (arbitrarily large) compact subsets of the feasibleset XN . (Pannocchia et al., 2011)
FOCAPO/CPC 2017 20 / 34

Problem 2—Inherent robustness of (sub)optimal MPC
Real systems are affected by disturbances that cause the nominal model tono longer hold
Process errors d lead to model error x+ = f (x , u) + d
Measurement errors e corrupt x estimate to x + e
With disturbances, the closed-loop system becomes
x+ ∈ Fde(x) := {f (x , u) + d | u ∈ κN(x + e)} (2)
Theorem 2 (Robust exponential stability of (sub)optimal MPC)
The origin of the perturbed closed-loop system (2) is robustlyexponentially stable on (arbitrarily large) compact subsets of the feasibleset XN . (Pannocchia et al., 2011)
FOCAPO/CPC 2017 20 / 34

Problem 2—Extension to discrete actuators
Once again, the extension to discrete actuators is immediate
The set U need not be convex, connected, etc.—it need only containthe origin
However, design choices become more striking with discrete actuators:
Theory precludes a large change in control action at the setpointI System must be locally stabilizable using only unsaturated actuatorsI Discrete actuators are always saturated
Single (set)point stabilization may no longer be an appropriate goal
FOCAPO/CPC 2017 21 / 34

Problem 2—Extension to discrete actuators
Once again, the extension to discrete actuators is immediate
The set U need not be convex, connected, etc.—it need only containthe origin
However, design choices become more striking with discrete actuators:
Theory precludes a large change in control action at the setpointI System must be locally stabilizable using only unsaturated actuatorsI Discrete actuators are always saturated
Single (set)point stabilization may no longer be an appropriate goal
FOCAPO/CPC 2017 21 / 34
Problem 2—Extension to discrete actuators
Once again, the extension to discrete actuators is immediate
The set U need not be convex, connected, etc.—it need only containthe origin
However, design choices become more striking with discrete actuators:
Theory precludes a large change in control action at the setpointI System must be locally stabilizable using only unsaturated actuatorsI Discrete actuators are always saturated
Single (set)point stabilization may no longer be an appropriate goal
FOCAPO/CPC 2017 21 / 34

Feasible Sets
MPC is stabilizing on XN
but XN may not be what you expect
10 15 20 25 30T1
10
15
20
25
30
T2
Continuous Actuator
10 15 20 25 30T1
10
15
20
25
30Discrete Actuator
Xf X1 X2 X3 X4 X5 X6
FOCAPO/CPC 2017 22 / 34

Feasible Sets
MPC is stabilizing on XN but XN may not be what you expect
10 15 20 25 30T1
10
15
20
25
30
T2
Continuous Actuator
10 15 20 25 30T1
10
15
20
25
30Discrete Actuator
Xf X1 X2 X3 X4 X5 X6
FOCAPO/CPC 2017 22 / 34

Problem 3—Economic MPC with periodic constraints
Let the sequences (xp,up) denote a given T -periodic solution to a periodicnonlinear system
xp(i + 1) = f (xp(i), up(i), i)
xp(i + T ) = xp(i), up(i + T ) = up(i)
In the third problem, we assume a periodic solution is available, butchange the controller’s goal from stabilization of the periodic solution(tracking) to optimization of economic performance.
The periodic solution then serves as a useful end constraint for theeconomic optimization problem.
The stage cost `(x , u) is free to be chosen as an economic profitfunction and has no connection to distance from (xp, up) as in thetracking case.
FOCAPO/CPC 2017 23 / 34

Setup for economic MPC with periodic constraint
xp(t + 1)
xp(t)
(x , t)
XN(t)
xp(t − 1)
xp(t + N)
Figure 2: The periodic solution xp(t) as end constraint for economic MPC problem fora system with initial condition (x , t) and N = 2.
FOCAPO/CPC 2017 24 / 34

Mixed-Integer Programming
Mixed-integer optimization has the following general form:
minx∈Rn
f (x)
s.t. g(x) ≤ 0
xi ∈ I, i ∈ I ⊆ {1, . . . , n}Objective function f , constraints g , and integer variables I
Special case is mixed-integer quadratic program (MIQP)I f is convex quadraticI g is linear (i.e., affine)
MIQP software (e.g., Gurobi, SCIP, CPLEX) can find solutions much moreefficiently than a brute force search.
Relax integrality constraints and solve
Branch on fractional variables to enforce integrality and repeat
FOCAPO/CPC 2017 25 / 34
Mixed-Integer Programming
Mixed-integer optimization has the following general form:
minx∈Rn
f (x)
s.t. g(x) ≤ 0
xi ∈ I, i ∈ I ⊆ {1, . . . , n}Objective function f , constraints g , and integer variables I
Special case is mixed-integer quadratic program (MIQP)I f is convex quadraticI g is linear (i.e., affine)
MIQP software (e.g., Gurobi, SCIP, CPLEX) can find solutions much moreefficiently than a brute force search.
Relax integrality constraints and solve
Branch on fractional variables to enforce integrality and repeat
FOCAPO/CPC 2017 25 / 34

Mixed-Integer Programming
Mixed-integer optimization has the following general form:
minx∈Rn
f (x)
s.t. g(x) ≤ 0
xi ∈ I, i ∈ I ⊆ {1, . . . , n}Objective function f , constraints g , and integer variables I
Special case is mixed-integer quadratic program (MIQP)I f is convex quadraticI g is linear (i.e., affine)
MIQP software (e.g., Gurobi, SCIP, CPLEX) can find solutions much moreefficiently than a brute force search.
Relax integrality constraints and solve
Branch on fractional variables to enforce integrality and repeat
FOCAPO/CPC 2017 25 / 34

Computational Burden
Exhaustive branching can take an extremely long time. Luckily, powerfulsolvers have a number of other techniques.
Pre-solve to remove unnecessary variables or equality constraints
Derive valid inequalities to improve relaxation bound
Employ strong branching or other methods to choose the “best”fractional variable to branch on
Retain basis information so re-solving a branch is quick
However, MIQP is attractive for a number of reasons.
Discrete variables can model discrete (e.g., on/off) decisions
A conservative estimate of optimality gap is available
Less difficult than general nonlinear global optimization (with orwithout discrete variables)
FOCAPO/CPC 2017 26 / 34
Computational Burden
Exhaustive branching can take an extremely long time. Luckily, powerfulsolvers have a number of other techniques.
Pre-solve to remove unnecessary variables or equality constraints
Derive valid inequalities to improve relaxation bound
Employ strong branching or other methods to choose the “best”fractional variable to branch on
Retain basis information so re-solving a branch is quick
However, MIQP is attractive for a number of reasons.
Discrete variables can model discrete (e.g., on/off) decisions
A conservative estimate of optimality gap is available
Less difficult than general nonlinear global optimization (with orwithout discrete variables)
FOCAPO/CPC 2017 26 / 34
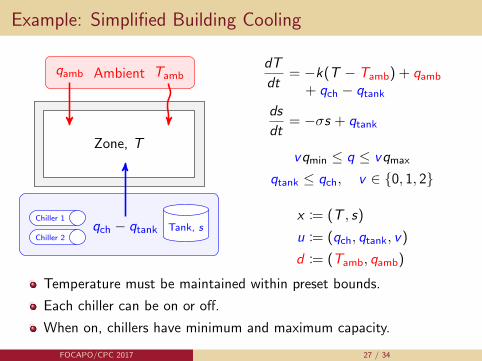
Example: Simplified Building Cooling
Zone, T
Ambientqamb Tamb
Chiller 1
Chiller 2qch − qtank Tank, s
dT
dt= −k(T − Tamb) + qamb
+ qch − qtank
ds
dt= −σs + qtank
vqmin ≤ q ≤ vqmax
qtank ≤ qch, v ∈ {0, 1, 2}
x := (T , s)
u := (qch, qtank, v)
d := (Tamb, qamb)
Temperature must be maintained within preset bounds.
Each chiller can be on or off.
When on, chillers have minimum and maximum capacity.
FOCAPO/CPC 2017 27 / 34
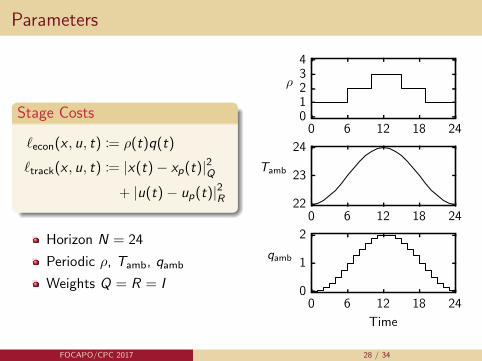
Parameters
Stage Costs
`econ(x , u, t) := ρ(t)q(t)
`track(x , u, t) := |x(t)− xp(t)|2Q+ |u(t)− up(t)|2R
Horizon N = 24
Periodic ρ, Tamb, qamb
Weights Q = R = I
0 6 12 18 2401234
ρ
0 6 12 18 2422
23
24
Tamb
0 6 12 18 24
Time
0
1
2
qamb
FOCAPO/CPC 2017 28 / 34
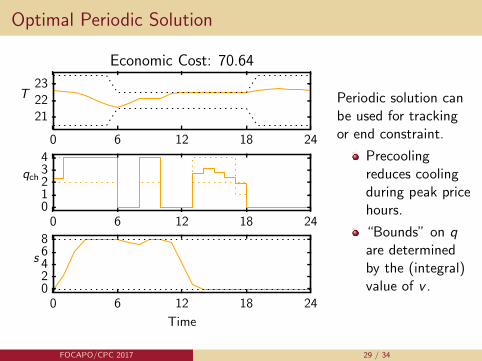
Optimal Periodic Solution
0 6 12 18 24
212223
T
Economic Cost: 70.64
0 6 12 18 2401234
qch
0 6 12 18 24
Time
02468
s
Periodic solution canbe used for trackingor end constraint.
Precoolingreduces coolingduring peak pricehours.
“Bounds” on qare determinedby the (integral)value of v .
FOCAPO/CPC 2017 29 / 34

Tracking MPC
0 6 12 18 24
212223
T
Economic Cost: 77.80
0 6 12 18 2401234
qch
0 6 12 18 24
Time
02468
s
Tracking MPCconverges to theperiodic reference.
Initial conditionT (0) = 2,s(0) = 0.
Stage costpenalizes changesin T , s, qch,qtank, and v .
FOCAPO/CPC 2017 30 / 34
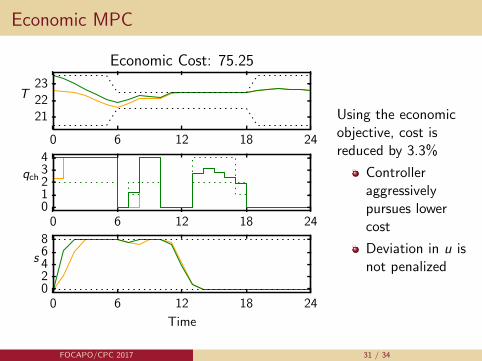
Economic MPC
0 6 12 18 24
212223
T
Economic Cost: 75.25
0 6 12 18 2401234
qch
0 6 12 18 24
Time
02468
s
Using the economicobjective, cost isreduced by 3.3%
Controlleraggressivelypursues lowercost
Deviation in u isnot penalized
FOCAPO/CPC 2017 31 / 34

Conclusions
MPC is well suited to high-level operational goals like energy or costminimization.
MPC of large-scale HVAC energy systems offers significant economicbenefit over current operations.
Hierarchical decomposition is the key design step. Several candidatesremain viable for this step.
Supporting MPC theory: discrete actuators and general nonlinearsystems
I Nominal stability of optimal and suboptimal MPC with a steady-stateoperating point (Rawlings and Risbeck, 2016)
I Inherent robustness of suboptimal MPC with mixedcontinuous/discrete actuators (Allan, Risbeck, and Rawlings, 2016)
I Asymptotic stability of the periodic tracking problem with terminalregion
I Asymptotic stability of economic MPC with periodic end constraint
FOCAPO/CPC 2017 32 / 34

Conclusions
MPC is well suited to high-level operational goals like energy or costminimization.
MPC of large-scale HVAC energy systems offers significant economicbenefit over current operations.
Hierarchical decomposition is the key design step. Several candidatesremain viable for this step.
Supporting MPC theory: discrete actuators and general nonlinearsystems
I Nominal stability of optimal and suboptimal MPC with a steady-stateoperating point (Rawlings and Risbeck, 2016)
I Inherent robustness of suboptimal MPC with mixedcontinuous/discrete actuators (Allan et al., 2016)
I Asymptotic stability of the periodic tracking problem with terminalregion
I Asymptotic stability of economic MPC with periodic end constraint
FOCAPO/CPC 2017 32 / 34

Conclusions
MPC is well suited to high-level operational goals like energy or costminimization.
MPC of large-scale HVAC energy systems offers significant economicbenefit over current operations.
Hierarchical decomposition is the key design step. Several candidatesremain viable for this step.
Supporting MPC theory: discrete actuators and general nonlinearsystems
I Nominal stability of optimal and suboptimal MPC with a steady-stateoperating point (Rawlings and Risbeck, 2016)
I Inherent robustness of suboptimal MPC with mixedcontinuous/discrete actuators (Allan et al., 2016)
I Asymptotic stability of the periodic tracking problem with terminalregion
I Asymptotic stability of economic MPC with periodic end constraint
FOCAPO/CPC 2017 32 / 34
Conclusions
MPC is well suited to high-level operational goals like energy or costminimization.
MPC of large-scale HVAC energy systems offers significant economicbenefit over current operations.
Hierarchical decomposition is the key design step. Several candidatesremain viable for this step.
Supporting MPC theory: discrete actuators and general nonlinearsystems
I Nominal stability of optimal and suboptimal MPC with a steady-stateoperating point (Rawlings and Risbeck, 2016)
I Inherent robustness of suboptimal MPC with mixedcontinuous/discrete actuators (Allan et al., 2016)
I Asymptotic stability of the periodic tracking problem with terminalregion
I Asymptotic stability of economic MPC with periodic end constraint
FOCAPO/CPC 2017 32 / 34
Future Work
Release test problem based on Stanford SESI system for the researchcommunity to benchmark new control system designs(other decompositions, robust MPC, stochastic MPC, etc.)
Software! We all need it. We shouldn’t all be duplicating it. Freesource model recommended for research community. Why?fama, nullus fortuna!
Hierarchical decomposition: quantify the complexity/performancetradeoff
Large energy systems as players in the real-time electricity market
Combined scheduling and control
More large-scale applications. Move the needle on total US energyconsumption
Process industries: anything planned besides DMC(n)?
FOCAPO/CPC 2017 33 / 34

Future Work
Release test problem based on Stanford SESI system for the researchcommunity to benchmark new control system designs(other decompositions, robust MPC, stochastic MPC, etc.)
Software! We all need it. We shouldn’t all be duplicating it. Freesource model recommended for research community. Why?
fama, nullus fortuna!
Hierarchical decomposition: quantify the complexity/performancetradeoff
Large energy systems as players in the real-time electricity market
Combined scheduling and control
More large-scale applications. Move the needle on total US energyconsumption
Process industries: anything planned besides DMC(n)?
FOCAPO/CPC 2017 33 / 34
Future Work
Release test problem based on Stanford SESI system for the researchcommunity to benchmark new control system designs(other decompositions, robust MPC, stochastic MPC, etc.)
Software! We all need it. We shouldn’t all be duplicating it. Freesource model recommended for research community. Why?fama, nullus fortuna!
Hierarchical decomposition: quantify the complexity/performancetradeoff
Large energy systems as players in the real-time electricity market
Combined scheduling and control
More large-scale applications. Move the needle on total US energyconsumption
Process industries: anything planned besides DMC(n)?
FOCAPO/CPC 2017 33 / 34

Future Work
Release test problem based on Stanford SESI system for the researchcommunity to benchmark new control system designs(other decompositions, robust MPC, stochastic MPC, etc.)
Software! We all need it. We shouldn’t all be duplicating it. Freesource model recommended for research community. Why?fama, nullus fortuna!
Hierarchical decomposition: quantify the complexity/performancetradeoff
Large energy systems as players in the real-time electricity market
Combined scheduling and control
More large-scale applications. Move the needle on total US energyconsumption
Process industries: anything planned besides DMC(n)?
FOCAPO/CPC 2017 33 / 34
Future Work
Release test problem based on Stanford SESI system for the researchcommunity to benchmark new control system designs(other decompositions, robust MPC, stochastic MPC, etc.)
Software! We all need it. We shouldn’t all be duplicating it. Freesource model recommended for research community. Why?fama, nullus fortuna!
Hierarchical decomposition: quantify the complexity/performancetradeoff
Large energy systems as players in the real-time electricity market
Combined scheduling and control
More large-scale applications. Move the needle on total US energyconsumption
Process industries: anything planned besides DMC(n)?
FOCAPO/CPC 2017 33 / 34
Future Work
Release test problem based on Stanford SESI system for the researchcommunity to benchmark new control system designs(other decompositions, robust MPC, stochastic MPC, etc.)
Software! We all need it. We shouldn’t all be duplicating it. Freesource model recommended for research community. Why?fama, nullus fortuna!
Hierarchical decomposition: quantify the complexity/performancetradeoff
Large energy systems as players in the real-time electricity market
Combined scheduling and control
More large-scale applications. Move the needle on total US energyconsumption
Process industries: anything planned besides DMC(n)?
FOCAPO/CPC 2017 33 / 34

Future Work
Release test problem based on Stanford SESI system for the researchcommunity to benchmark new control system designs(other decompositions, robust MPC, stochastic MPC, etc.)
Software! We all need it. We shouldn’t all be duplicating it. Freesource model recommended for research community. Why?fama, nullus fortuna!
Hierarchical decomposition: quantify the complexity/performancetradeoff
Large energy systems as players in the real-time electricity market
Combined scheduling and control
More large-scale applications. Move the needle on total US energyconsumption
Process industries: anything planned besides DMC(n)?
FOCAPO/CPC 2017 33 / 34

Future Work
Release test problem based on Stanford SESI system for the researchcommunity to benchmark new control system designs(other decompositions, robust MPC, stochastic MPC, etc.)
Software! We all need it. We shouldn’t all be duplicating it. Freesource model recommended for research community. Why?fama, nullus fortuna!
Hierarchical decomposition: quantify the complexity/performancetradeoff
Large energy systems as players in the real-time electricity market
Combined scheduling and control
More large-scale applications. Move the needle on total US energyconsumption
Process industries: anything planned besides DMC(n)?
FOCAPO/CPC 2017 33 / 34
Acknowledgments
Thanks to Johnson Controls, Inc. for sample data, equipment models,and research funding.
The authors gratefully acknowledge the financial support of the NSFthrough grant #CTS-1603768.
FOCAPO/CPC 2017 34 / 34
References I
D. A. Allan, M. J. Risbeck, and J. B. Rawlings. Stability and robustness ofmodel predictive control with discrete actuators. In American ControlConference, pages 32–37, Boston, MA, July 6–8, 2016.
D. Angeli, R. Amrit, and J. B. Rawlings. On average performance andstability of economic model predictive control. IEEE Trans. Auto. Cont.,57(7):1615–1626, 2012.
C. Bohm, T. Raff, M. Reble, and F. Allgower. LMI-based model predictivecontrol for linear discrete-time periodic systems. In L. Magni,D. Raimondo, and F. Allgower, editors, Nonlinear Model PredictiveControl - Towards New Challenging Applications, pages 99–108.Springer Berlin / Heidelberg, 2009.
A. Bemporad and M. Morari. Control of systems integrating logic,dynamics, and constraints. Automatica, 35:407–427, 1999.
FOCAPO/CPC 2017 1 / 7

References II
M. Diehl, R. Amrit, and J. B. Rawlings. A Lyapunov function for economicoptimizing model predictive control. IEEE Trans. Auto. Cont., 56(3):703–707, 2011.
N. H. El-Farra and P. D. Christofides. Coordinating feedback andswitching for control of hybrid nonlinear processes. AIChE J., 49(8):2079–2098, 2003.
M. Ellis, H. Durand, and P. D. Christofides. A tutorial review of economicmodel predictive control methods. J. Proc. Cont., 24(8):1156–1178,2014.
P. Falugi and D. Q. Mayne. Tracking a periodic reference using nonlinearmodel predictive control. In 52nd IEEE Conference on Decision andControl, pages 5096–5100, 2013. doi: 10.1109/CDC.2013.6760689.
L. Grune and M. Stieler. Asymptotic stability and transient optimality ofeconomic mpc without terminal conditions. J. Proc. Cont., 24(8):1187–1196, 2014.
FOCAPO/CPC 2017 2 / 7

References III
R. Huang, E. Harinath, and L. T. Biegler. Lyapunov stability ofeconomically oriented NMPC for cyclic processes. J. Proc. Cont., 21:501–509, 2011.
K. Kapoor, K. M. Powell, W. J. Cole, J. S. Kim, and T. F. Edgar.Improved large-scale process cooling operation through energyoptimization. Processes, 1(3):312–329, 2013.
K. Kobayshi and K. Hiraishi. Computational techniques for modelpredictive control of large-scale systems with continuous-valued anddiscrete-valued inputs. J. Appl. Math., 2013:9, 2013.
M. Lazar, W. Heemels, S. Weiland, and A. Bemporad. Stabilizing modelpredictive control of hybrid systems. IEEE Trans. Auto. Cont., 51(11):1813–1818, 2006.
FOCAPO/CPC 2017 3 / 7

References IV
D. Limon, T. Alamo, D. de la Pena, M. N. Zeilinger, C. Jones, andM. Pereira. MPC for tracking periodic reference signals. In Proceedingsof the IFAC Conference on Nonlinear Model Predictive Control, numberEPFL-CONF-181940, 2012.
M. A. Muller, D. Angeli, and F. Allgower. Transient average constraints ineconomic model predictive control. Automatica, 50(11):2943–2950,2014.
Y. Ma, J. Matusko, and F. Borrelli. Stochastic model predictive control forbuilding HVAC systems: Complexity and conservatism. IEEE Trans.Cont. Sys. Tech., 23(1):101–116, 2015.
B. Mayer, M. Killian, and M. Kozek. Management of hybrid energy supplysystems in buildings using mixed-integer model predictive control.Energ. Convers. Manage., 98:470–483, 2015.
FOCAPO/CPC 2017 4 / 7
References V
F. Oldewurtel, A. Parisio, C. N. Jones, D. Gyalistras, M. Gwerder,V. Stauch, B. Lehmann, and M. Morari. Use of model predictive controland weather forecasts for energy efficient building climate control.Energ. Buildings, 45:15–27, 2012.
G. Pannocchia, J. B. Rawlings, and S. J. Wright. Conditions under whichsuboptimal nonlinear MPC is inherently robust. Sys. Cont. Let., 60:747–755, 2011.
N. R. Patel, J. B. Rawlings, M. J. Wenzel, and R. D. Turney. Design andapplication of distributed economic model predictive control forlarge-scale building temperature regulation. In 4th International HighPerformance Buildings Conference at Purdue, West Lafayette, IN, July11–14, 2016.
D. E. Quevedo, G. C. Goodwin, and J. A. De Dona. Finite constraint setreceding horizon quadratic control. Int. J. Robust and NonlinearControl, 14(4):355–377, 2004.
FOCAPO/CPC 2017 5 / 7

References VI
C. V. Rao and J. B. Rawlings. Steady states and constraints in modelpredictive control. AIChE J., 45(6):1266–1278, 1999.
J. B. Rawlings and M. J. Risbeck. Model predictive control with discreteactuators: Theory and application. Accepted to Automatica, 2016.
M. J. Risbeck, C. T. Maravelias, J. B. Rawlings, and R. D. Turney.Closed-loop scheduling for cost minimization in HVAC central plants. In4th International High Performance Buildings Conference at Purdue,West Lafayette, IN, July 11–14 2016.
J. Stagner. Enterprise optimization solution (EOS) cost savings vs. manualplant dispatching. Report on Central Energy Facility, Stanford EnergySystem Innovations, 2016.
C. R. Touretzky and M. Baldea. A hierarchical scheduling and controlstrategy for thermal energy storage systems. Energ. Buildings, 110:94–107, 2016.
FOCAPO/CPC 2017 6 / 7

References VII
M. J. Wenzel, R. D. Turney, and K. H. Drees. Autonomous optimizationand control for central plants with energy storage. In 4th InternationalHigh Performance Buildings Conference at Purdue, West Lafayette, IN,2016.
M. Zanon, S. Gros, and M. Diehl. A lyapunov function for periodiceconomic optimizing model predictive control. In Decision and Control(CDC), 2013 IEEE 52nd Annual Conference on, pages 5107–5112, 2013.
FOCAPO/CPC 2017 7 / 7