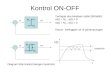
Standard PLC Program PID Controller
Seq D2HDocument \h \r1 ACESYS Program
PID Controller
Doc-To-Help Standard Manual By FLS Automation
FLS Automation A/S
Hffdingsvej 77
DK-2500 Valby
Copenhagen
Denmark
+45 36 18 27 00
Fax: +45 36 18 27 99Printing History:
VersionAceV6.5.4
$Revision:: 1 $
Last modified$Modtime:: 26. October 2001 $
AuthorPoul Nielsen
Last modified by$Author:: Finn Kousgaard Poulsen $
Name of Word File$Workfile:: PID_Controller.doc $
Index Range0-1000
Disclaimer:
Information in this document is subject to change without notice
and does not represent a commitment on the part of FLS Automation
A/S.
The present documentation from FLS Automation A/S is subject to
the content of the ordered, confirmed and supplied system
configuration.
Options specified and described in the FLS Automation A/S
documentation as part of the general description but initially
neither ordered by the customer nor confirmed by the seller - will
not commit the supplier to any further and future supply and/or
installation.
FLS Automation A/S assumes no responsibility for any errors that
may appear in this document.
Copyright FLS Automation A/S. All rights reserved.
Contents
1PID Controller
Introduction1Operating modes31. Automatic mode32. Manual mode33.
Cascade mode34. Balanced Mode3List of Abbreviations4PID Controller
Input parameters/Flags51. NO PID Controller Number52. PVNO Number
of the Analog block used as PV53. PV_TRACK Enable/Disable PV
Tracking54. AUTO_EN Enable/Disable Auto mode55. EXT1_EN
Enable/Disable External 1 mode (Cascade)56. EXT1SP External 1
Setpoint (Cascade)57. FR1 Enable/Disable Force 1 (Up) Value58.
FR1SP Force 1 (Up) Value59. FR2 Enable/Disable Force 2 (Down)
Value510. FR2SP Force 2 Value511. EXT2 Enable/Disable External 2
(Balanced) Mode612. EXT2SP External 2 Setpoint (Balanced Mode)613.
EXTPV_EN Enable/Disable External PV614. EXTPV External PV
(Value)615. EXT_FAULT External Fault6PID Controller Output
parameters/Flags71. CV - Controlled Value72. CO - Physical Analog
Output73. AUTO - Controller in Auto74. AINORM - Process Variable
Normalised75. SPNORM - Set point Normalised7PID Controller
Interface Flags81. PID_PARA_CTLx P, I, Dparameter 1 .. 482. FR_AUTO
Force Auto83. FR_MAN Force Manual84. FR_EXT1 Force External 1
(Cascade)85. INV Inverse Operation8Additional Parameter Settings91.
Deviation Fault92. Ramp Time93. Output Min/Max94. Upper/Lower
Deadband9Program structure10ECS-Faceplate
Controller11ECS-Faceplate, PID Parameters 112ECS-Faceplate, PID
Parameters 213ECS-Faceplate, Trend Curve diagram14Controller status
to ECS15Siemens S7-program structure16Reserved Function-blocks in
STEP716Reserved data blocks16PID Controller Step7 program structure
118PID Controller Step7 program structure 219PID Controller Step7
program structure 320Control Logix program structure21Calling
Subroutines for PID Controllers25Defining Module type26Point
address Configuration27Concept program structure29Special output
pins for PID-ACESYS.29Concept program structure30A and B point
address configuration31
PID Controller
Introduction
The PID function block is pre-programmed to handle all commonly
used control loops, such as standard loops, cascade control and
Balanced Mode etc., and a step controller in combination with the
positioner.
All Controllers have the functions of Manual/Auto changeover. In
Manual operating mode the output can be controlled directly with
+/- or a decimal value can be set directly.
Four set of controller parameters P-I-D are available. If a
controlled system has different dynamics based on the operating
point, then a different set of PID-controller parameters can be
adapted through the ECS system.
Tracking of setpoint and output for bumble transfer is also a
part of the controller.
A PID controller, often called a three-point controller, has
three important parameters to be set. The P-value (proportional
part), the I-value (integral time) and the D-value (derivative
time). All pre-programmed ACESYS controllers have their D part
equal to zero.
The standard PID faceplate allows, depending on the mode the
user, to adjust the set point or output value of the associated PID
controller. The value may be adjusted by manual entry, by moving
the slider bar or by a percentage adjustment. Through the external
modes provision is made for support of cascaded control loops. In
this case the Aux. signal could reflect an external set point.
PID loops are implemented at the PLC level so the values
displayed in the faceplate describe the immediate values in the
PLC.
The PID parameter window allows for examination and modification
of the Proportional, Integral and Derivative controller parameters
as well as setting values for maximal and minimal allowed output.
Any parameter change is logged in the ECS event system and
therefore traceable. Change of parameters in the PID controller is
only allowed for users being granted the proper access privileges.
Being a general faceplate the faceplate model can be modified to
make an exact match of the PID parameters available in the PLC.
The PID trend window provides a short-term trend display for the
measurements involved in the PID control. The curves are updated
every second and the window length of the display is 10 minutes. In
addition to providing a quick overview of the control performance
due to fast updating, the PID trend window is suitable for tuning
of fast control loops. Long term history information on the PID
values must be found using the general trend utility.
Operating modes
The following four operating modes are possible:
1. Automatic mode
This operating mode is released from the faceplate, and if the
interface Controller in Automatic mode Enable = 1 and there are no
faults controller will go into AUTO mode. In Auto mode the
controller is using the internal setpoint send out from the ECS
system.
The Automatic setpoint can be set in three different ways.
Via 1% or 5% keys
Entering a decimal figure
Using the sliding bar
2. Manual mode
This operating mode is released from the faceplate, and is a
flip-flop function with the Auto mode.
In operating mode MANUAL the output can be controlled directly
with more / less or a value can be set directly as a decimal
value.
3. Cascade mode
This operating mode is released from the faceplate, and if the
interface Controller in Cascade mode Enable = 1, then the
controller will accept the External 1 setpoint.
4. Balanced Mode
With Interface Controller Balanced mode = "1", done in the PLC
program, will the controller go into Balanced mode, and then the
Balanced setpoint value is transferred to the output of the
controller. For example, when two controllers are connected to form
a cascade, the output of the primary controller can be connected as
the Balanced mode set point of the secondary controller. This
interface is normally written into in manual mode by the ECS system
if the program does not provide it. (E.g.: If the controller is the
leading one in a cascade, the set point of the subordinate
controller is connected to this interface.)
An example of Balanced mode is also the ratio calculation of a
mill total feed is transferred via the controller to the external
controller when the total feed controller is in AUTO.
List of Abbreviations
FLSAHTCAnalog signal descriptionInterface
NONRPID-Controller Number \Relate "PID_Controller.doc!26",
"PID-Controller Number" \D2HTargetDefault Input integer
PV_NORX1NRNumber of the analog block used as PV \Relate
"PID_Controller.doc!2", "Number of the analog block used as PV"
\D2HTargetDefault Input integer
PV_TRACKRSNFEnable/Disable PV tracking \Relate
"PID_Controller.doc!3", "Enable/Disable PV tracking"
\D2HTargetDefault Input Flag
AUTO_ENRFGSEnable/Disable Auto modeInput Flag
EXT1_ENRWEE1Enable/Disable Extern l Set Point (Cascade) \Relate
"PID_Controller.doc!5", "Enable/Disable Extern l Set Point
(Cascade)" \D2HTargetDefault Input Flag
EXT1SPRWEX1Extern l Set Point ( Cascade) \Relate
"PID_Controller.doc!6", "Extern l Set Point ( Cascade)"
\D2HTargetDefault Input Floating point
FR1RWEE2Enable/Disable Force Value l (Up) Set Point \Relate
"PID_Controller.doc!7", "Enable/Disable Force Value l (Up) Set
Point" \D2HTargetDefault Input Flag
FR1SPRWEX2Force Value l (Up) Set Point \Relate
"PID_Controller.doc!8", "Force Value l (Up) Set Point"
\D2HTargetDefault Input Floating point
FR2RWEE3Enable/Disable Force Value 2 (Down) Set Point \Relate
"PID_Controller.doc!9", "Enable/Disable Force Value 2 (Down) Set
Point" \D2HTargetDefault Input Flag
FR2SPRWEX3Force Value 2 (Down) Set Point \Relate
"PID_Controller.doc!10", "Force Value 2 (Down) Set Point"
\D2HTargetDefault Input Floating point
EXT2RWEE4Enable/Disable Extern 2 Set Point (Balanced Mode)
\Relate "PID_Controller.doc!11", "Enable/Disable Extern 2 Set Point
(Balanced Mode)" \D2HTargetDefault Input Flag
EXT2SPRWEX4Extern 2 Set Point (Balanced Mode) \Relate
"PID_Controller.doc!12", "Extern 2 Set Point (Balanced Mode)"
\D2HTargetDefault Input Floating point
EXTPV_ENRX2NREnable/Disable Extern PV \Relate
"PID_Controller.doc!13", "Enable/Disable Extern PV"
\D2HTargetDefault Input Flag
EXTPVRX2PVExtern PV \Relate "PID_Controller.doc!14", "Extern PV"
\D2HTargetDefault Input Floating point
EXT_FAULTRSAExternal Fault \Relate "PID_Controller.doc!15",
"External Fault" \D2HTargetDefault Input Flag
CVRYCOControlled Value \Relate "PID_Controller.doc!16",
"Controlled Value" \D2HTargetDefault Output Floating point
CORYAPhysical Analog Output \Relate "PID_Controller.doc!17",
"Physical Analog Output" \D2HTargetDefault Output integer
AUTORAUTController in Auto = "1" \Relate
"PID_Controller.doc!18", "Controller in Auto = ^341^34"
\D2HTargetDefault Output Flag
AINORMRX1NORMPV Normalized in 0-100 \Relate
"PID_Controller.doc!19", "PV Normalized in 0-100" \D2HTargetDefault
Output Floating point
SPNORMRWENORMSet Point Normalized in 0-100 \Relate
"PID_Controller.doc!20", "Set Point Normalized in 0-100"
\D2HTargetDefault Output Floating point
PID_PARA_CTL1RTA1PID-Controller use PID-Set 1 \Relate
"PID_Controller.doc!21", "PID-Controller use PID-Set 1"
\D2HTargetDefault Interface Flag
PID_PARA_CTL2RTA2PID-Controller use PID-Set 2 \Relate
"PID_Controller.doc!21", "PID-Controller use PID-Set 2"
\D2HTargetDefault Interface Flag
PID_PARA_CTL3RTA3PID-Controller use PID-Set 3 \Relate
"PID_Controller.doc!21", "PID-Controller use PID-Set 3"
\D2HTargetDefault Interface Flag
PID_PARA_CTL4RTA4PID-Controller use PID-Set 4 \Relate
"PID_Controller.doc!21", "PID-Controller use PID-Set 4"
\D2HTargetDefault Interface Flag
FR_AUTOFR_RFGSForce PID-Controller into AUTO MODE \Relate
"PID_Controller.doc!22", "Force PID-Controller into AUTO MODE"
\D2HTargetDefault Interface Flag
FR_MANFR_RHNDForce PID-Controller into MANUAL MODE \Relate
"PID_Controller.doc!23", "Force PID-Controller into MANUAL MODE"
\D2HTargetDefault Interface Flag
FR_EXT1FR_RWEE1Force PID-Controller into EXTERNAL 1 MODE
(Cascade) \Relate "PID_Controller.doc!24" \D2HTargetDefault
Interface Flag
INVRINVInverse operating mode of the PID-Controller \Relate
"PID_Controller.doc!25", "Inverse operating mode of the
PID-Controller" \D2HTargetDefault Interface Flag
PID Controller Input parameters/Flags
1. NO PID Controller Number
This parameter must be assigned each module, within a range of
140, and must be unique.
2. PVNO Number of the Analog block used as PV
This parameter is a decimal number for this controller is using
the Process Variable subroutine there.
3. PV_TRACK Enable/Disable PV Tracking
A logic 1 on this parameter will let the Automatic setpoint
follow the actual value in Manual mode, for a bumbles transfer when
the controller is swapped from Manual to Automatic mode, and
visa-verse.
4. AUTO_EN Enable/Disable Auto mode
A logic 1 on this parameter permits the controller to go into
Auto mode, when selected from the faceplate.
5. EXT1_EN Enable/Disable External 1 mode (Cascade)
A logic 1 on the External 1 parameter allows the controller to
be selected into cascade mode from the faceplate.
6. EXT1SP External 1 Setpoint (Cascade)
The controller will use the External 1 setpoint shown on the
faceplate, when selected. The setpoint can come from e.g. a
calculation or a master controller.
7. FR1 Enable/Disable Force 1 (Up) Value
A logic 1 on this parameter will force the controller output up
to the setpoint given on Forced 1 (up) Value.
The controller will after the force is removed go into Manual
mode.
8. FR1SP Force 1 (Up) Value
Setpoint for the controller when its brought into Force 1 (up)
mode.
9. FR2 Enable/Disable Force 2 (Down) Value
A logic 1 on this parameter will force the controller output
down to the setpoint given on Forced 2 (Down) Value
The controller will after the force is removed go into Manual
mode.
10. FR2SP Force 2 Value
Setpoint for the controller when its brought into Force 2 (Down)
mode.
11. EXT2 Enable/Disable External 2 (Balanced) Mode
A logic 1 on this parameter will bring the controller in
Balanced mode.
Balanced Mode, where the leading controller in a cascade sets
its CV, so bumbles auto man transition is ensured.
12. EXT2SP External 2 Setpoint (Balanced Mode)
The controller will use the Setpoint Balanced Mode when there is
a Logic 1 on the Balanced Mode parameter. The setpoint can come
from e.g. a calculation or a master controller.
13. EXTPV_EN Enable/Disable External PV
A logic 1 on this parameter will enable the controller to use an
external PV, which could come from e.g. a calculation
14. EXTPV External PV (Value)
This value is this Variable, normalised in a range from 0-100,
could come from e.g. from a calculation e.g. PV mill total feed
15. EXT_FAULT External Fault
An external fault signal switches the controller to mode Manual.
The controller displays a fault. This signal is in addition to the
analog fault and the fault from the corresponding positioner
module.
PID Controller Output parameters/Flags
1. CV - Controlled Value
The Controlled Value is an output from the controller and is
normalised in a range from 0-100. This output can e.g. be used as
inputs to slave controllers or as input to the Positioner.
2. CO - Physical Analog Output
This is an output from the controller for the analog output
module.
3. AUTO - Controller in Auto
In Auto mode is an output flag which is logic 1 when the
controller is in Auto mode.
4. AINORM - Process Variable Normalised
This Process Variable, normalised in range from 0-100, is output
coming from the Analog Measuring module.
If the PV gets faulty the controller will swap into Manual
mode.
5. SPNORM - Set point Normalised
This is the actual setpoint, normalised in range from 0-100,
used by the controller.
PID Controller Interface Flags
1. PID_PARA_CTLx P, I, Dparameter 1 .. 4
The controller can be set to use four sets of PID-parameters.
Setting the actual flag in the PLC for the set one wants to use
individually enables them. It can be useful to swap between
different sets of parameters e.g. in a cooling tower control were
the amount of gasses lead through the cooling changes drastically,
depending on the process situation.
2. FR_AUTO Force Auto
The controller can be forced into "Auto" mode by programming a
logically "1" on this parameter.
3. FR_MAN Force Manual
The controller can be forced into "Manual" mode by programming a
logically "1" on this parameter.
4. FR_EXT1 Force External 1 (Cascade)
The controller can be forced into "Cascade" mode by programming
a logically "1" on this parameter.
5. INV Inverse Operation
The controller will operate in inverse mode, PV increase = CV
decrease, by programming a logically "1" on this parameter. (The
Normal operation of the controller is PV increase = CV
increases.)
Additional Parameter Settings
1. Deviation Fault
If the Setpoint plus/minus the PV value exceed the inserted max.
limit value and the deviation fault enable is enabled and the alarm
delay time has expired, then an alarm will be generated, indicating
"DEV. FAULT"
2. Ramp Time
The output of the controller can by means of the Ramp Time, when
it's enabled, be set to follow a certain time-driven curve. The
smaller the time is set the smaller are changes over the time
period.
3. Output Min/Max
The output of the controller can be limited by given in the
values for minimum and maximum of the controller. The range is 0 to
100%.
4. Upper/Lower Deadband
If the process variable or the setpoint is affected by higher
frequency noise and the controller is optimally set, the noise will
also affect the controller output. This can lead to faster wear and
tear on the final control element. The Deadband function can
suppress this noise and thereby reduce oscillation of the
controller output.
Program structure
Below is shown a layout of a standard PID Controller:
ECS-Faceplate Controller
The operator can bring up the following faceplate by right hand
clicking on a motor symbol or a motor status field.
ECS-Faceplate, PID Parameters 1
ECS-Faceplate, PID Parameters 2
ECS-Faceplate, Trend Curve diagram
Controller status to ECS
The ECS system is polling a data block in the PLC for retrieving
status from the controller. Below are showing the various states a
controller can be in.
The PID Controller uses the B-point algorithm no. 40 for the
controller mode.
Siemens S7-program structure
The programming language STEP7 corresponds to IEC standard IEC
1131-3 and DIN EN-61131-3.
The ACESYS PID controllers are realised using the standard
MODREG (= modular control) package for PLCs in the SIMATIC family.
The MODREG function blocks are not a part of ACESYS and have to be
purchased separately together with their manual.
STEP7 is used for SIMATIC Functions, it stores programs in
FC-blocks and is using Function Blocks (FBs) as subroutines.
In ACESYS FB-blocks are already pre-programmed for all motors,
valves, gates and dampers, which can be programmed. The following
diagram shows in which Function blocks (FCs) that the subroutines
(FBs) are to be programmed.
Reserved Function-blocks in STEP7
Reserved data blocks
For the purpose to store and organise data for ECS communication
and internal status of a function block, Data Blocks are used.
In the following table the overview of used DBs is shown:
In ACESYS controller the setpoint are stored in DB20. The first
word is the Auto setpoint and the next is the Manual setpoint the
consecutive order is: data word; Controller No * 8, e.g..
Controller No. 2 (2 x 8 = DW16).
Data block No.: 21 contain the Controller modes. The first word
is the controller mode and the next is the timestamp. The
consecutive order is: data word; Controller No * 4, e.g. Controller
No. 2 (2 x 4 = DW8).
PID Controller Step7 program structure 1
Continuing on next page
PID Controller Step7 program structure 2
PID Controller Step7 program structure 3
Control Logix program structure
A AceSys subroutine called Z12_FLSA_Controller is used for all
PID Controllers. One tag has to be created for each PID Controller
as shown below:
It is possible to manipulate and monitor data in the data
structures for the created tags. In general tags starting with int
should not be changed since they are for internal use in the
subroutine.
In the following example are shown necessary rungs to program a
PID-Controller:
Selecting PID-parameters:
It is possible to select between 4 sets of PID parameters. In
the above rungs parameter set 1 is selected.
Inverted Operating mode:
To invert the operation mode of the PID controller, set the INV
flag high. The default value is low.
Auto Mode:
The AUTO_EN is used to control if it should be possible to
select Auto Mode from the faceplate. If the flag is low, it is not
possible to select Auto mode from faceplate.
The FR_AUTO is used to force the PID into Auto Mode controlled
by the PLC-program.
Manual Mode:
The FR_MAN is used to force the PID into Manual Mode controlled
by the PLC-program.
Force Up:
The variable FR1SP is the setpoint for Force Up mode. The value
has to be in the interval 0-100.
To force the PID into Force Up mode the pin FR1 has to be
set.
Force Up will bring the PID into manual mode.
Force Down:
The variable FR2SP is the setpoint for Force Down mode. The
value has to be in the interval 0-100.
To force the PID into Force Down mode the pin FR2 has to be
set.
Force Down will bring the PID into manual mode.
Cascade Mode:
The variable EXT1SP is the setpoint for Cascade Mode. The value
has to be in the interval 0-100.
To bring the PID into Cascade mode the pin EXT1 has to be set.
The PID must be in Auto Mode to activate Cascade Mode.
The EXT1_EN is used to control if it should be possible to
select Cascade Mode from the faceplate. If the flag is low, it is
not possible to select Cascade Mode from faceplate.
The Auto Setpoint will be tracked in Cascade Mode.
Balanced Mode:
The variable EXT2SP is the setpoint for Balanced Mode. The value
has to be in the interval 0-100.
To bring the PID into Balanced mode the pin EXT2 has to be
set.
Balanced Mode will bring the PID into manual mode.
The Manual Setpoint will be tracked in Balanced Mode.
Extern PV:
The variable EXTPV is used to decide the wanted external PV. The
value has to be in the interval 0-100.
To activate the External Process Value the pin EXTPV_EN has to
be set.
PV Track:
If the PID is in Manual Mode and the flag PV_TRACK is high, the
Auto Setpoint will track on the Process value. The purpose is to
obtain a bumbles transfer when the controller is swapped from
Manual to Auto Mode.
Process Value:
The Process Value for the PID is moved to the variable AINORM.
The value has to be in the range 0-100.
To ensure that the PID is not acting on a invalid process value
the flag ANA_OK is used to bring the status from the analog signal
to the PID. The flag must be high to bring the PID into Auto
Mode.
Calling the Subroutine:
1st instruction:Assign the unit number
2nd instruction:Code for the signal type (e.g. 1 = 4-20mA)
3rd instruction:Code for the analog output type (e.g. 0 = 1756
series)
4th instruction:Calling the subroutine with the following
parameters:
Routine Name:Z12_FLSA_Controller
Input par.:Unit tag
Input par.:Group/Route command tag
Return par.:Unit tagOutputs:
Two outputs are available from the PID Controller. The CO output
is for direct connection of a analog output, in the range decided
by the input signals CODE and MOD_TYPE. CV is a output in the range
0-100.
If the PID Controller is controlling a positioner nothing has to
be connected to the output pins. Connection has to be done on the
positioner.
Calling Subroutines for PID Controllers
The subroutines for PID Controllers are call from the program
F00_DISPATCHER. This dispatcher is executed every 100mS. In the
dispatcher program is implemented a counter counting to 10.
Depending of the value of this counter various subroutines are
called. The purpose of this program is to reduce the PLC load. Each
PID Controller subroutine is executed every seconds.
Defining Module type
Since the raw value range from Control Logix I/O module return
differ it has been necessary to assign a new input to the analog
block, when using Control Logix PLCs. The following table shows the
supported combinations of output modules and signals:
Signal DataRaw range and limits
MOD_TYPECODELow SignalHigh SignalRAW_MINRAW_MAX
0=1756-xxxx (Output)0= 0-20mA0 (0mA)100 (20mA)0 (0mA)100
(20mA)
0=1756-xxxx (Output)1= 4-20mA *-25 (0mA)100 (20mA)0 (4mA)100
(20mA)
0=1756-xxxx (Output)6= 0-10V0 (0V)100 (10V)0 (0V)100 (10V)
10=1794-OE4/B (Output)0= 0-20mA **0 (0mA)31200 (20mA)0
(0mA)31200 (20mA)
10=1794-OE4/B (Output)1= 4-20mA **0 (0mA)31200 (20mA)6240
(4mA)31200 (20mA)
10=1794-OE4/B (Output)6= 0-10V **0 (0V)31200 (10V)0 (0V)31200
(10V)
100=Calc 0-100100=Calc01000100
101=Calc 0-4095100=Calc0409504095
102=Calc 0-31200100=Calc031200031200
* Module Config 0-20mA
** Module Config 0-10V / 0-20mA
For the 1756-serie modules it is expected that the modules are
configured to use the output range 0-100 equal to the signal range
indicated by the code.
Example 1:
Module= 0 (1756-series)
Code= 1 (4-20mA)
Module has to be configured for input range 0-20mA
High signal = 20.0mA / High Engineering = 100.0
Low signal = 0.0mA / Low Engineering = -25.0
Example 2:
Module= 0 (1756-series)
Code= 0 (0-20mA)
Module has to be configured for input range 0-20mA
High signal = 20mA / High Engineering = 100.0
Low signal = 0.0mA / Low Engineering = 0.0
Point address Configuration
For each PID controller one B-point and two A-points are
necessary. The B-point is used to monitor the PID mode, and the
A-points are used to set and monitor the SPA (Setpoint Auto) and
SPM (Setpoint Manual).
The following picture illustrates the configuration of the
B-point for PID mode:
The index for PID_MODE corresponds to the variable NO assigned
before calling the subroutine for the PID Controller.
B-point algorithm no. 40 is used for PID-mode.
The following picture illustrates the configuration of A-points
for PID setpoint Auto and Manual:
The configuration of the address for SPA and SPM is the same,
except for the index for the PID_SETPOINT. The index is calculated
as follow:
Index for SPA: (NO * 2 ) 1
Index for SPA: NO * 2
The variable NO is assigned before calling the subroutine for
the PID Controller.
A-point algorithm no. 3 is used for Setpoint Auto.
A-point algorithm no. 4 is used for Setpoint Manual.
Concept program structure
Special input pins for PID-ACESYS.
INV: Literal (Data type: BOOL (0 or 1)) for direct or inverse
reaction of the controller. 0=Direct reaction (ERROR increasing
means controller output increasing). 1= Inverse reaction (ERROR
increasing means controller output decrease).
P_en: Literal (Data type: BOOL (0 or 1)) for enabling P-portion
(Gain factor) in the controller. 1= Enable, 0= Disable.
I_en: Literal (Data type: BOOL (0 or 1)) for enabling I-portion
(Integration factor) in the controller. 1= Enable, 0= Disable.
D_en: Literal (Data type: BOOL (0 or 1)) for enabling D-portion
(Differentiation factor) in the controller. 1= Enable, 0=
Disable.
The controller works after the formula:
Y=(err*P)+(err*I)+(err*D) if all factors are enabled.
PIDpar: Literal (Data type: UINT) for selecting which PID
constant the controller must be working after. 1=PID-set 1,
2=PID-set 2, 3=PID-set 3, 4=PID-set 4. (Chapter ECS-Faceplate, PID
Parameters 1 & 2, show that the controller are able to work
with 4 different sets of PID parameters).
SPpoint: Literal (Data type: UINT) pointing to 4xx-register
where the PID-ACESYS block can read the Automatic Setpoint (SPA)
and the Manuel Setpoint (SPM) from ECS. It must be the same literal
as the direct 4xx-register address connected to the output pin
(STAT1), but without the number 4 in front of it. (ex. If
STAT1=%4:05107, then SPpoint=5107)
PARAno: Literal (Data type: UINT) pointing to 4xx-register where
the parameter area for the PID_ASEC is beginning. Each PID-ACESYS
block is taken up 80 words as parameter area. (See Data-layout for
the Concept program Chapter 15 page 19)
DEP_COM: Structured variable (Data type: DEPCOM) containing all
Department commands. (See Group table 1)
Special output pins for PID-ACESYS.
STAT1: Direct 4xx-register address (Data type: RealArr2 of 2
real values (4words)) holding the Automatic Setpoint (SPA) and the
Manuel Setpoint (SPM) from ECS.
STAT2: Direct 4xx-register address (Data type: Word-array of 2
words.) holding status information and timestamp for the
controller. These 2 words are read by the ECS. 1.Word: contain
status information about the analog signal. 2.Word: contain
Timestamp for events in the PID-ACESYS block. (Se Data-layout for
the Concept program Chapter 15 page 19)
Concept program structure
A and B point address configuration
The PID-ACESYS block needs 3 points in the ECS.
Next you will see the 1. Point: an A-point (Automatic Setpoint)
address configuration in the ECS.
The point Code: UF01M013F1_SPA.
PLC: 1 (PLC no. (In which PLC this point is reading)).
Input type: Float (Reading 2 words: The value of the Automatic
Setpoint)
Input Register: 5107 (equal to the data register address
%4:05107 connected to the output pin STAT1 on the PID-ACESYS
block)
Input Bit: Always zero.
Output type: Holding Register (Reading 1 word).
Output Register: 5107 (the same as input register).
Output Bit: Always zero.
Parameter type: Holding Register (Pointer for start reading data
register area of 80 words).
Parameter Register: 49081 (equal to the data type UINT connected
to the input pin PARAno on the PID-ACESYS block).
Next you will see the 2. Point: an A-point (Manual Setpoint)
address configuration in the ECS.
The point Code: UF01M013F1_SPM.
PLC: 1 (PLC no. (In which PLC this point is reading)).
Input type: Float (Reading 2 words: The value of the Manual
Setpoint)
Input Register: 5109 (equal to the data register address
%4:05109 which must be data register address connected to the
output pin STAT1 + 2 (5107 + 2 = 5109).
Input Bit: Always zero.
Output type: Holding Register (Reading 1 word).
Output Register: 5109 (the same as input register). Output Bit:
Always zero.
Parameter type: Holding Register (Pointer for start reading data
register area of 80 words).
Parameter Register: 49081 (equal to the data type UINT connected
to the input pin PARAno on the PID-ACESYS block).
Next you will see the 3. Point: a B-point (The MODE of the PID)
address configuration in the ECS.
The point Code: UF01M013F1_MODE.
PLC: 1 (PLC no. (In which PLC this point is reading)).
Input type: HR-16bit/Timestamp (Reading 2 words: 1.word=Status
for the PID. 2.word=Timestamp for when an event happened.)
Input Register: 5111 (equal to the data register address
%4:05111 connected to the output pin STAT2 on the PID-ACESYS
block)
Input Bit: Always zero.
Output type: Holding Register (Reading 1 word).
Output Register: 49107 (equal to the data register address
%4:49107, which must be parameter address + 26
(49081+26=49107).
Output Bit: Always zero.
Parameter type: Holding Register (Pointer for start reading data
register area of 80 words).
Parameter Register: 49081 (equal to the data type UINT connected
to the input pin PARAno on the PID-ACESYS block)
_1014112248.doc
EMBED PBrush
_1061041808.doc
EMBED Visio.Drawing.5
_995868450.vsd
_1061041813.vsd
_1061043193.docValue
Value Text
Text Color
Alarm State
Symbol Offset
Operating
Hours
1
Auto
Green
Normal
1
FALSE
2
Cascade
Gold
Normal
1
FALSE
3
Forced Dn
Cyan
Normal
0
FALSE
4
Forced Up
Cyan
Normal
0
FALSE
5
Manual
Brown
Normal
0
FALSE
6
Balance
White
Normal
0
FALSE
7
Dev. Fault
Flash Red
Alarm
0
TRUE
8
Dev. Fault
Red
Alarm
0
TRUE
9
Ext. Fault
Red
Alarm
0
TRUE
10
AI Fault
Red
Alarm
0
TRUE
_1061812300.doc
_1014112504.doc
EMBED PBrush
_1014201113.doc
EMBED PBrush
_1014112456.doc
EMBED PBrush
_995869504.docData block DB20 controller setpoints
DW8
Setpoint controller #1
DW12
Man setpoint controller #1
DW16
Setpoint controller #2
DW20
Man setpoint controller #2
DW24
Setpoint controller #3
DW28
Man setpoint controller #3
DW32
Setpoint controller #4
DW36
Man setpoint controller #4
..
DW320
Setpoint controller #40
DW322
Man Setpoint controller #40
_1003086011.doc
EMBED PBrush
_1003086158.doc
EMBED PBrush
_1003086323.doc
EMBED PBrush
_995869647.docData block DB21 controller Mode
DW4
Mode controller #1
DW6
Time Stamp controller #1
DW8
Mode controller #2
DW10
Time Stamp controller #2
DW12
Mode controller #3
DW14
Time Stamp controller #3
DW16
Mode controller #4
DW18
Time Stamp controller #4
..
DW160
Mode controller #40
DW162
Time Stamp controller #40
_995869175.docBlock list Controllers
FC2001
Controller #1
FC2002
Controller #2
FC2003
Controller #3
FC2040
Controller #40























![Pi Pid Controller[eBook.veyq.Ir]](https://img.pdfslide.net/doc/110x75/577cd44b1a28ab9e789821ba/pi-pid-controllerebookveyqir.jpg)