-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
1/35
CSCI-8810 Image Processing - Project 2(By Akshay Choche)
Edge Detection
Component Labeling
Pyramid Construction
First-Order & Zero-Order Hold Scheme
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
2/35
This project is actually continuation of Project 1. In this
project I have implemented various Edge detection
Algorithms like Roberts Operator, Kirsh Operator. Also a
component labeling algorithm was implemented.
This project can be categorized as below.
1) Edge Detection Algorithms.
I) Robert's Operator.
II) Sobel Operator.
III) Prewitt Operator.
IV)Kirsh Operator.
V) Finding the Laplacian of a grey scale image and Displaying it
on screen.
2) Component Labeling.
3) Pyramid Construction.
4) Expanding pyramid using hold schemes.
I) Zero-Order Hold Scheme.
II) First-Order Hold Scheme.
1.I) Edge Detection using Robert's Operator:
Robert's Operator is used for detecting the Edges in an image.
Its a differential operator which tries
to approximate the gradient of an image through discrete
differentiation. The Masks used for this are
as below.
Figure 1.1.a Roberts Operator Mask 1 and Mask 2 Respectively
Lets look at some examples below.
Figure 1.1.b Original Figure 1.1.c After Applying Mask 1
Figure 1.1.d After Applying Mask 2 Figure 1.1.e After Merging
O/P from Mask 1&2
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
3/35
Although this method works well you will be astonished after
looking at the o/p using other operators like
Prewitt's or Kirsh's. Lets look at some more examples of Roberts
operator before we move to next operator.
Figure 1.1.f Original
Figure 1.1.g After Applying Mask 1 Figure 1.1.f After Applying
Mask 2
Figure 1.1.h After Merging O/P from Mask 1&2
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
4/35
I know that the O/P shown above is not convincing but I still
selected such an image so that I could
highlight the performance of other operators.
1.II.a) Edge Detection Using Sobel Operator:
Sobel operator is also used for edge detection. It is also a
differential operator used for
approximating the gradient of an image. However this operator
uses a different mask which performs lot
better than the Robert's Operator. This is evident from the
examples shown below. Sobel operator is moreinclined towards
finding horizontal and vertical edges first and then using these
intermediate results to
generate a final O/P.
Figure 1.2.a Masks used for Sobel Operator.(here A is original
image)
Figure 1.2.b Strength of Sobel Operator Figure 1.2.c Phase of
Sobel Operator
Lets look at some examples.
Figure 1.2.d Original Figure 1.2.e After applying Mask Gy
Figure 1.2.f After applying Mask Gx Figure 1.2.g After Merging
O/P from Gx & Gy
It is evident that Sobel operator performs way better than
Roberts Operator. Using Sobel operator you arenot only able to get
the boundaries of the coins but you can also get some boundary
information that there
on the coin themselves (i.e. the faces of presidents).
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
5/35
Now lets try this operator on the bike image (Figure 1.1.f).
Figure 1.2.h Original Image
Figure 1.2.i After applying Mask Gy Figure 1.2.j After applying
Mask Gx
Figure 1.2.k After Merging O/P from Mask 1&2
We can observe that (Figure 1.2.k) is way better than (Figure
1.1.h).
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
6/35
1.II.b) Edge Detection Using Alternate Sobel operator:
The only difference between this method and the one shown above
is that the Mask used differ.
Figure 1.2.l Masks used for Alternate Sobel Operator.
Figure 1.2.m Strength of Sobel Operator Figure 1.2.n Phase of
Sobel Operator
Lets look at an example,
Figure 1.2.o Original Image Figure 1.2.p After applying Mask
Gx
Figure 1.2.q After applying Mask Gy Figure 1.2.r After Merging
O/P from Mask 1&2
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
7/35
1.III) Edge Detection Using Prewitt Operator:
Prewitt Operator is another operator that can be used for edge
detection. However Prewitt Operator
is more inclined towards finding the horizontal and vertical
edges and then using both of these intermediate
result to generate a final image. The Masks used for this
operator are as below.
Figure 1.3.a Masks used for Prewitt Operator(here A is original
image).
Figure 1.3.b Final result generated using Gx &Gy.
Lets look at some Examples to illustrate the functioning of this
Operator.
Figure 1.3.c Original Image Figure 1.3.d After applying Mask
Gy
Figure 1.3.e After applying Mask Gx Figure 1.3.f After Merging
O/P from Mask 1&2
Again we can see that even this operator works better than the
Roberts Operator.
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
8/35
Now lets try this operator on the bike image (Figure 1.1.f).
Figure 1.3.g Original Image
Figure 1.3.h After applying Mask Gy Figure 1.3.i After applying
Mask Gx
Figure 1.3.j After Merging O/P from Mask 1&2
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
9/35
1.IV) Edge Detection Using Kirsh Operator:
Another variation in Edge detecting algorithms is Kirsh
Operator. This variation finds the edge at
positive and negative 45O angles. Then uses these intermediate
results to generate a final image. The Masks
used for these operation are as shown below.
Figure 1.4.a Masks used for Kirsh Operator.
Figure 1.4.b Final result generated using Gx &Gy.
Lets look at some Examples to illustrate the functioning of this
Operator.
Figure 1.4.c Original Image Figure 1.4.d After applying Mask
Gx
Figure 1.4.e After applying Mask Gy Figure 1.4.f After Merging
O/P from Mask 1&2
Again we can see that even this operator works better than the
Roberts Operator.
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
10/35
Now lets try this operator on the bike image (Figure 1.1.f).
Figure 1.4.g Original Image
Figure 1.4.h After applying Mask Gx Figure 1.4.i After applying
Mask Gy
Figure 1.4.j After Merging O/P from Mask 1&2
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
11/35
1.V) Edge Detection using Laplacian Matrix:
This edge detection technique is a second order differential
operator which tries to approximate
the gradient of an image through second order discrete
differentiation. It uses the following mask in
order to find the Laplacian of an image.
a b
Figure 1.5.a,b Masks used for Laplacian Transform
Below is an example where we find Laplacian on an image and use
scaling in order to display it.
Figure 1.5.c Original Image
Figure 1.5.d After applying Mask a Figure 1.5.e After applying
Mask b
Now lets try this operator on the bike image (Figure 1.1.f).
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
12/35
Figure 1.5.f Original Image.
Figure 1.5.g After applying Mask a. Figure 1.5.h After applying
Mask b.
This concludes the Edge Detection Part of this report. Lets do
some experiments with these Operators and
see how they perform. Also throughout this report I have been
criticizing Roberts Operator, Is there a way to
improve its performance, well we will try to answer that
question too.
Now, lets use some general image and see how these operators
perform.
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
13/35
Figure 1.6.a Original Image Figure 1.6.b After Roberts
Operator
Figure 1.6.c After Sobel Operator Figure 1.6.d After Sobel
Alternate Operator
Figure 1.6.e After Prewitt Operator Figure 1.6.f After Kirsh
Operator
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
14/35
Now lets talk about how can we improve Roberts Operator. Well I
think why not apply Roberts operator
again but this time to the O/P generated from the first stage
(i.e. Figure 1.6.b). This is much better than the
previous O/P.
Figure 1.6.g After applying Roberts Operator to Figure 1.6.b
In the first report I kept on saying that smoothing or noise
reduction makes the boundaries lighter and lighter
i.e. the boundaries start disappearing. Lets confirm what we
said previously.
Figure 1.7.a Original Image Figure 1.7.b After applying Sobel's
Operator
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
15/35
Figure 1.7.c After apply Averaging Mask of Order 10 Figure 1.7.d
After applying Sobel Operator to
to Figure 17.a Figure 1.7.c
On comparing figure 1.7.d and figure 1.7.b we can see that Noise
reduction indeed makes the edges lighter.
Lets see how edge detection works with a noisy image. How it
behaves before noise reduction and after
noise reduction.
Figure 1.8.a Noisy Image Figure 1.8.b Applying Sobel to Fig
1.8.a
Figure 1.8.c After applying Sobel operator to Fig 1.8.a but this
time we apply noise reduction first.
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
16/35
Finally lets conclude this section with experimenting how edge
detection works with Black and White
Image.
Figure 1.8.d Original Image Figure 1.8.e After Iterative
Thresholding.
Figure 1.8.f After Sobel Operator Figure 1.8.g After Prewitt
Operator
You can see that the O/P generated after converting the image to
Black and White is way better than
previous results. Compare figures 1.8.f and 1.8.g with figure
1.7.b.
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
17/35
2) Component Labeling:
Component Labeling allows a user to identify objects/blobs in an
image. The algorithm simply
traverses through all the pixels and tries to estimate pixels
which could potentially belong to a single
component. The algorithm that I have implemented is 4 connect.
This is sometimes also refereed to as blob
extraction or blob discovery. In the program implementation I
try to find not only how many
components are present in the image but also try to estimate
their average size in number of pixels.
Figure 2.a 4-Connect Component Labeling
Lets look at some of the examples.
Figure 2.b Original Image
Figure 2.c The O/P generated at the console.
The Fig 2.c describes the O/P that we get to see on the console.
It identifies that there are 3 components in
the original image. Below we can see the components identified
by this systems.
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
18/35
Figure 2.d First Component Identified. Figure 2.e Second
Component Identified.
Figure 2.f Third Component Identified.
Lets look at another example.
Figure 2.g Original Image.
Now lets look at the O/P.
Figure 2.f O/P at console
The components identified by the program are as below.
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
19/35
(a) (b) (c)
Figure 2.g. (a)(b)(c) Represents the components identified by
the software
One good this about this software is that it correctly
identified (b) as a single component.
Looking at these results we feel that component labeling is
really a neat way for blob identification. So are
there any drawback to this algorithm? Well there is one but its
not a serious drawback. Lets see this with an
example.
Figure 2.e Original Image with 1 component.
Figure 2.f O/P at console
The program identifies that there are 2 components in the image
above but we can see only one.
Figure 2.g First Component Identified Figure 2.h Second
Component Identified
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
20/35
But why is the program saying that there are two components when
we can actually see that there is just a
single component. Well the 4 connect method that we use is the
root cause of all this. It only checks the left
and the top neighbor of a pixel, thus it fails to see that these
images are actually connected diagonally as
shown below.
Figure 2.i Its a magnification of the connection between the
white component, the red circle highlights the connection.
So is there are way to over come this, well the answer is yes we
can go for 8 connect method
Figure 2.j Eight Connect Method
This discussion concludes the components labeling section of
this report.
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
21/35
3) Pyramid Construction:
Given an image we construct multi-resolution version of the same
image by smoothing and sub
sampling. Example if the image has a resolution of 512X512 we
construct its equivalent in following
resolution (256X256, 128X128, 64X64, 32X32, 16X16). These 5
images can be considered as layers in a
pyramid with the original image representing the base of the
pyramid and the others being the upper layers
of the pyramid.
Lets look at an Example.
Figure 3.a Original Image
Figure 3.a Pyramid Construction from an image
Individually the Image look like this.
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
22/35
256X256 128X128 64X64 32X32 16X16
Figure 3.b Various Levels of the Pyramid
Although its not necessary that the Image be of 512X512
resolution, but it helps in simplifying the code.Apart from that
Ideally the resolution of the image should be in 2 to the power n (
2 n ). If the original image
doesn't support this we can always do that algorithmically by
introduction black or white band at the edges.
So can we use the same technique and try to increase the
resolution of an image? Well theoretically the
answer is yes we can do that but that problem with it is that
after some iteration, when we blow up the
image it will start looking bad visually and would contain large
number of blocks. Lets see how that works
now we will take image with resolution 32X32 and try to
blow/enlarge it to resolution of 256X256.
Figure 3.c Original 32X32
64X64 128X128 256X256
Figure 3.d After increasing the Resolution by First-Order hold
scheme.
Here we can see that as we go on increasing the resolution of
the image it starts to have many BLOBs in it
and is visually not that great. However this is very important
in pattern recognition. In pattern recognition
you would actually want BLOBs, as per information theory BLOBs
represent information so rather than
scanning the entire image one would actually Blow up a lesser
resolution version of an image and search for
BLOBs in it. Once you find a BLOB you could restrict the search
area to the BLOB location in the originalimage and thus this would
save you lot of time. The process of increasing the resolution of
an image can be
achieved using First-Order hold Scheme and Zero-Order Hold
Scheme which will be discussed in the later
section.
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
23/35
Now Lets see what happens when we convert the levels of the
pyramid to black and white and then apply
Edge detection technique.
Figure 3.e Generating 5 levels of pyramids for Image in
fig3.a
Figure 3.f Generating B/W image using Iterative
Thresholding.
Figure 3.g After Performing Sobel Operator on Fig 3.f
We can see in the Figure 3.g how various components in the image
start converging into BLOBs as we
move from 256, 128, 64 and so on, and these BLOBs can be used
for pattern recognition. I know the
original image chosen for this operation is not appropriate but
after the last section we will do some more
experimentation for pattern recognition.
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
24/35
4.I) Zero-Order Hold Scheme:
This is a very simple way to blow up an image. Here you go on
increasing the resolution of an
image. The increase is in powers of 2. Example if we have an
image with resolution 64X64 and we want to
blow it up to 512X512 then we increase it first to 128X128 then
to 256X256 and finally to 512X512. Also
the net work done over here is simple, we just copy the pixel
from initial image into 4 adjacent location in
the final image.
2 5
3 6
(a)
2 2 5 5
2 2 5 5
3 3 6 6
3 3 6 6
(b)
Figure 4.1.a Represents the Zero-Order Hold Scheme where values
are repeated from (a) to (b)
Now lets look at a real example we will take a 128X128 image and
blow it up to 512X512.
Figure 4.1.b Original Image 128X128
Iteration 1: We generate a 256X256 equivalent using Zero-Order
hold scheme.
Figure 4.1.c Increase the resolution to 256X256
Iteration 2: Finally we blow up the image to 512X512
resolution.
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
25/35
Figure 4.1.d Increase the resolution to 512X512
This is how the Zero-Order hold scheme works. I had mentioned
earlier that thou its theoretically possible
for us to blow up an image to even higher resolution, but we
start to see boxing effect as we go on
increasing the resolution, as see in the image above. However
although we start seeing BLOBs in the image
these BLOBs are use full in pattern recognition.
Lets us check out another example. Lets apply zero-order hold
scheme on a 64X64 resolution pic as shown
below.
Figure 4.1.e 64 X 64 Original Image
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
26/35
Figure 4.1.f After applying zero order hold scheme (128X128)
Figure 4.1.g After applying zero order hold scheme (256X256)
Figure 4.1.h After applying zero order hold scheme (512X512)
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
27/35
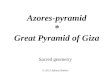
4.II) First-Order Hold Scheme:
This is another way to blow up an image. Even in this case we go
on increasing the resolution in
powers of 2, but instead to just plainly copying pixel value at
adjacent location in new image we calculate
the average among the neighboring pixels to determine new pixel
values.
Figure 4.2.a Initial Row Expansion
Look at the image above we simply stretch the original image
array horizontally to create empty spaces
between column for new pixels and fill them up with the average
of its two neighbors. Example between 8
and 4 in the first row of Original Image Array we insert 6 which
is average of 8 and 4, we carry this process
for each neighbor in each row and get the matrix as shown in the
right hand side image. In the next step we
carry out the same thing, but this time we create empty space
between rows and fill them up with average of
the neighbors (i.e. Column Expansion) as show below.
Figure 4.2.b After Column Expansion
Like in the example shown above we insert a new pixel between 8
and 4, which is 6 i.e. the average of 8 and
6, we repeat this for every neighbors in every column till we
get a matrix as shown in the right hand side of
the image. Generally the decimal values are rounded to the
nearest integer.
Enough with the theory now lets look at a real example we will
take a 128X128 image and blow it up to512X512. We will use the same
image as in Figure 4.1.b.
Figure 4.2.c Original 128X128 image
Iteration 1: We generate a 256X256 equivalent using First-Order
hold scheme.
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
28/35
Figure 4.2.d After increasing the resolution to 256X256 using
First-Order hold scheme
Iteration 2: Finally we blow up the image to 512X512
resolution.
Figure 4.2.e After increasing the resolution to 512X512 using
First-Order hold scheme
Clearly we can see that First-Order hold scheme performs much
better than the Zero-Order hold scheme. To
see the difference compare Figure 4.2.e with Figure 4.1.d and
compare Figure 4.2.d with Figure 4.1.c.
Lets us check out another example. Lets apply first-order hold
scheme on a 64X64 resolution pic as shown
below.
Figure 4.2.f 64 X 64 Original Image
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
29/35
Figure 4.2.g After applying first order hold scheme
(128X128)
Figure 4.2.g After applying first order hold scheme
(256X256)
Figure 4.2.f After applying first order hold scheme
(512X512)
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
30/35
Patter Recognition Experiment:
I have been saying that we can use the pyramid and hold scheme
to perform pattern recognition.
Now lets see how can we do that. Say we are given an image and
have been asked to write a code to find a
ship in that image. We have been told that the ship would cover
about 40% of the image. We are told to do
some pattern recognition in order to achieve our goal. Here is
one way of finding the ship.
Figure 5.a Original 512X512 resolution Image
Step 1) Find 5 levels of pyramid for this image. (i.e. Obtain
the image in following resolutions 256X256,
128X128 till16X16).
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
31/35
(a) (b) (c) (d) (e)
Figure 5.b Five levels of Pyramid.
Step 2) Convert each image into its Black and White
equivalent.
(a) (b) (c) (d) (e)
Figure 5.c Coverting them to Black and White.
Step 3) Apply edge detection Algorithm to each of the image say
Sobel's Operator.
(a) (b) (c) (d) (e)
Figure 5.d Applying Sobel's Operator to above images
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
32/35
Step 4) Blow up each image to 256X256 resolution using
First-Order Hold Scheme.
Figure 6 Applied First-Order Hold Scheme Figure 7 Applied
First-Order Hold Scheme
to 5.d (e) to 5.d (d)
Figure 8 Applied First-Order Hold Scheme Figure 9 Applied
First-Order Hold Scheme
to 5.d (c) to 5.d (b)
Figure 10 Applied First-Order Hold Scheme
to 5.d (a)
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
33/35
We see a single Blob in Figure 6 which roughly covers 40%-50% of
the image. This could be something
that we were looking for. So we Blow up the Fig 5.d (e) using
first-order hold scheme to get figure 7, which
confirms that fact about a single large Blob. So we narrow down
our search area to that vicinity in the
original picture and hence it takes relatively less time to
detect the presence of ship in the original image(i.e.
Figure 5.a).
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
34/35
Refernces of the images used in the report:
http://inperc.com/wiki/index.php?title=Gray_scale_function
http://www.wikipedia.org
http://academic.mu.edu/phys/matthysd/web226/images/
http://www.ece.rice.edu/~wakin/images/
http://inperc.com/wiki/index.php?title=Gray_scale_functionhttp://academic.mu.edu/phys/matthysd/web226/images/http://www.ece.rice.edu/~wakin/images/http://inperc.com/wiki/index.php?title=Gray_scale_functionhttp://academic.mu.edu/phys/matthysd/web226/images/http://www.ece.rice.edu/~wakin/images/
-
8/2/2019 Edge Detection Com Pol a Belling Pyramid Hold
Scheme
35/35
h ttp://www.cs.tut.fi/~foi/GCF-BM3D/images/boat.png
http://www.cs.tut.fi/~foi/GCF-BM3D/images/boat.pnghttp://www.cs.tut.fi/~foi/GCF-BM3D/images/boat.pnghttp://www.cs.tut.fi/~foi/GCF-BM3D/images/boat.png