Embed Size (px)
Citation preview

3/4/2018
1
EE140 Introduction to
Communication Systems
Review
1
Architecture of a (Digital) Communication System
2
Source A/Dconverter
Sourceencoder
Channelencoder Modulator
Channel
DetectorChanneldecoder
Sourcedecoder
D/Aconverter
User
Transmitter
Receiver
Absent ifsource isdigital
Noise

3/4/2018
2
Architecture of a (Digital) Communication System
3
Source A/Dconverter
Sourceencoder
Channelencoder Modulator
Channel
DetectorChanneldecoder
Sourcedecoder
D/Aconverter
User
Transmitter
Receiver
Absent ifsource isdigital
Noise
Deterministic signals
– Classification of signals
– Review of Fourier Transform
– Frequency-domain properties
– Time-domain properties
– Vector space and orthogonality
4

3/4/2018
3
Random signals
– Review of probability and random variables
– Random processes: basic concepts
– Gaussian white processes
5
Architecture of a (Digital) Communication System
6
Source A/Dconverter
Sourceencoder
Channelencoder Modulator
Channel
DetectorChanneldecoder
Sourcedecoder
D/Aconverter
User
Transmitter
Receiver
Absent ifsource isdigital
Noise

3/4/2018
4
Analog Modulation
– Amplitude modulation
• DSB
• SSB
• VSB
– Pulse modulation
– Angle modulation (phase/frequency)
7
Architecture of a (Digital) Communication System
8
Source A/Dconverter
Sourceencoder
Channelencoder Modulator
Channel
DetectorChanneldecoder
Sourcedecoder
D/Aconverter
User
Transmitter
Receiver
Absent ifsource isdigital
Noise

3/4/2018
5
Sampling and Quantization
• Sampling
– periodic sampling
– frequency domain representation of sampling
– Reconstruction of a bandlimited signal from samples
– change the sampling rate using discrete-time processing
• Quantization
– Uniform quantizer
– Non-uniform quantizer
– Vector quantization
– Sigma-delta modulation
9
Architecture of a (Digital) Communication System
10
Source A/Dconverter
Sourceencoder
Channelencoder Modulator
Channel
DetectorChanneldecoder
Sourcedecoder
D/Aconverter
User
Transmitter
Receiver
Absent ifsource isdigital
Noise

3/4/2018
6
Contents
• Information Theory
• Source Coding
11
Architecture of a (Digital) Communication System
12
Source A/Dconverter
Sourceencoder
Channelencoder Modulator
Channel
DetectorChanneldecoder
Sourcedecoder
D/Aconverter
User
Transmitter
Receiver
Absent ifsource isdigital
Noise

3/4/2018
7
Contents
• Signal Propagation
• Channel Models
• Channel Capacity
13
Contents
• Signal Waveforms
• Inter-symbol interference
• Signal design with zero ISI
• Signal design with controlled ISI
• Tx/Rx filter design with channel response
• Equalization
14

3/4/2018
8
Signal Design for Bandlimited Channel Zero ISI
• Nyquist condition for Zero ISI for pulse shape 1 0 0 0
or ∑ T
• With the above condition, the receiver output simplifies to
15
Nyquist Condition: Ideal Case• Nyquist’s first method for eliminating ISI is to use
1 | |
0
/
/
• = Nyquist bandwidth
• The minimum transmission bandwidth for zero ISI. A channel with bandwidth can support a max. transmission rate of 2 symbols/sec
16

3/4/2018
9
Practical Solution: Raised Cosine Spectrum• is made up of 3 parts: passband, stopband,
and transition band. The transition band is shaped like a cosine wave.
17
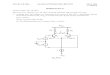
Equalizer Configuration
• Overall frequency response
• Nyquist criterion for zero-ISI
• Ideal zero-ISI equalizer is an inverse channel filter with
∝1
| | 1/218

3/4/2018
10
19
More about Equalization
Zero-Forcing Equalizer• : received pulse from a channel to be equalized
• ∑ 1, 00, 1, … ,
To suppose 2N adjacent interference terms
20

3/4/2018
11
Zero-Forcing Equalizer (cont’d)• Rearrange to matrix form
21
Architecture of a (Digital) Communication System
22
Source A/Dconverter
Sourceencoder
Channelencoder Modulator
Channel
DetectorChanneldecoder
Sourcedecoder
D/Aconverter
User
Transmitter
Receiver
Absent ifsource isdigital
Noise

3/4/2018
12
Content• Signal Space • Coherent reception -- binary modulations
– BPSK– BFSK– BASK
• Noncoherent reception– Noncoherent detection of BFSK– Differential PSK (DPSK)
23
Signal Space• Basic Idea: If a signal can be represented by n-
tuple, then it can be treated in much the same way as a n-dim vector.
• Consider a signal x(t) and suppose that
• If every signal can be written as above, then are the basis functions
24
N
iii )t(x)t(x
1
φ
Nii )t( 1φ

3/4/2018
13
Basis Functions for a Signal Set• Consider a set of M signals (M-ary symbol)
with finite energy. That is
• Then, we can express each of these waveforms as weighted linear combination of orthonormal signals
where N ≤ M is the dimension of the signal space, and are called the orthonormal basis functions
25
Mii )t(s 1
dt)t(si
2
N
jjiji )t(s)t(s
1
φ
Njj )t(1
φ
Gram Schmidt Orthogonalization (GSO) Procedure
• Suppose a signal set is given
• Find the orthogonal basis functions for this signal set
where
26
Mii )t(s 1
Njj )t(1
φ

3/4/2018
14
Binary Phase-Shift Keying (BPSK)• Modulation
“1” cos 2π
“0” cos 2π π cos 2π
– 0 , bit duration– : carrier frequency, ≫ 1/
– : transmitted signal energy per bit, i.e.
• The pair of signals differ only in a 180-degree phase shift
27
Signal Space Representation for BPSK• The basis function for BPSK
∅2cos 2 0
• Then ∅ and ∅
• A binary PSK system is characterized by signal space that is one-dimensional (i.e. N=1), and has two message points (i.e. M =2)
28
0 ∅ 2

3/4/2018
15
Decision Rule of BPSK• Assume that the two signals are equally likely, i.e.
0.5
• The optimum decision boundary is the midpoint of the line joining these two message points
• Decision rule:– Guess signal (or binary 1) was transmitted if the
received signal point r falls in region (r>0)– Guess signal (or binary 0) was transmitted otherwise
(r 0)29
0 ∅
- rr
Region Region
Probability of Error for BPSK• The conditional probability of the receiver deciding
in favor of given that is transmitted is0
1 2
• Due to symmetry 0
30

3/4/2018
16
for BPSK (cont’d)• Since the signals and are equally likely to
be transmitted, the average probability of error is
0.5 0.52
• This ratio is normally called bit energy to noise density ratio (or SNR/bit)
31
depends on ratio
Probability of Error and the Distance Between Signals
• In general,
32
2
BPSK BFSK BASK
, 2 , 2 , 2
2

3/4/2018
17
Content• M-ary modulations
– MASK– MPSK– MFSK– MQAM
• Performance trade-off
33
M-ary Phase-Shift Keying (MPSK)• The phase of the carrier takes on M possible values:
2 1 / , 1,… ,• Signal set:
2cos 2
2 1
– Energy per symbol– ≫
• Basis functions
∅2cos 2
∅2sin 2
34
1,… ,0
0

3/4/2018
18
MPSK (cont’d)• Signal space representation
s2
cos 22 1
2cos 2 cos
2 1 2sin 2 sin
2 1
cos2 1
∅ sin2 1
∅
cos sin
1,… ,
35
• Euclidean distance
2 12
• The minimum Euclidean distance is
2 12
2
– plays an important role in determining error performance (union bound)
• In the case of PSK modulation, the error probability is dominated by the erroneous selection of either one of the two signal points adjacent to the transmitted signal point
• Consequently, an approximation to the symbol error probability is
2/
/=2
36
MPSK

3/4/2018
19
M-ary Quadrature Amplitude Modulation(MQAM正交幅度调制)
• In MPSK, in-phase and quadrature components are interrelated in such a way that the envelope is constant (circular constellation)
• If we relax this constraint, we get M-ary QAM
37
MQAM• Signal set:
2cos 2
2sin 2 0
– is the energy of the signal with the lowest amplitude– , are a pair of independent integers
• Basis functions:
∅2cos 2 ∅
2sin 2 0
• Signal space representation
38

3/4/2018
20
Error Performance of MQAM• Upper bound of the symbol error probability
43
1 for 2
• Exercises:Determine the increase in required to maintain the same error performance if the number of bits per symbol is increased from k to k+1, when k is large.
39
Fundamental Tradeoff:Bandwidth Efficiency and Energy Efficiency
• To see the ultimate power-bandwidth tradeoff, we need to use Shannon’s channel capacity theorem:– Channel Capacity is the theoretical upper bound for the
maximum rate at which information could be transmitted without error (Shannon 1948)
– For a bandlimited channel corrupted by AWGN, the maximum rate achievable is given by
log 1 log 1
• Note that
• Thus2 / 1
40

3/4/2018
21
Content• Optimal Receive
– Concept– MAP, ML rules– Optimal receive in AWGN channel
• Correlator-type demodulator• Matched-filter-type demodulator
• Decision• Performance analysis
41
MAP Decision Criterion (cont’d)• By Bayes’ Rule:
|
• Since our criterion is to minimize the probability of detection error given , we deduce that the optimum decision rule is to choose if and only if is maximum for .
• Equivalently,
• This decision rule is known as maximum a posterior or MAP decision criterion
42

3/4/2018
22
ML Decision Criterion• If ⋯ , i.e., the signals { } are
equiprobable, finding the signal that maximizes is equivalent to finding the signal that
maximizes |• The conditional pdf | is usually called the
likelihood function. The decision criterion based on the maximum of | is called the Maximum-Likelihood (ML) criterion.
• ML decision rule:
• In any digital communication systems, the decision task ultimately reverts to one of these rules
43
Correlation Type Demodulator• The received signal r(t) is passed through a parallel
bank of N cross correlators which basically compute the projection of r(t) onto the N basis functions
∅ , 1,… ,
44

3/4/2018
23
Matched-Filter Type Demodulator• Alternatively, we may apply the received signal r(t)
to a bank of N matched filters and sample the output of filters at . The impulse responses of the filters are
∅ , 0
45
What is Matched Filter ?• The matched filter (MF) is the optimal linear filter
maximizing the output SNR.• Derivation of the MF
– Input signal component ↔
– Input noise component with PSD /2
– Output signal component
46

3/4/2018
24
Solution of Matched Filter• When the max output SNR 2 / is achieved, we
have∗
∗
∗
• Transfer function of the matched filter: complex conjugate of the input signal spectrum
• Impulse response: time-reversal and delayed version of the input signal
47
Determining the Optimum DecisionRegions
• In general, boundaries of decision regions are perpendicular bisectors of the lines joining the original transmitted signals
• Example: three equiprobable2-dim signals
48

3/4/2018
25
Probability of Error using DecisionRegions
• Suppose is transmitted and is received• Correct decision is made when ∈ with
probability∈ |
• Averaging over all possible transmitted symbols, we obtain the average probability of making correct decision
∈
• Average probability of error
1 1 ∈
49
Example: analysis• Now consider our example with binary data
transmission− Given is transmitted, then
∈
− Since is Gaussian with zero mean and variance /2
2 2ln
1/2
50

3/4/2018
26
Example: analysis (cont’d)• Note that when
2
/2
/2 22
51
Union Bound• Conditional error probability
→2
• Finally, with equally likely messages, the average probability of symbol error is upper bounded by
1 12
• The most general formulation of union bound
52

3/4/2018
27
Union Bound (cont’d)• Let denote the minimum distance, i.e.
min, ,
• Since · is a monotone decreasing function
21
2
• Consequently, we may simplify the union bound as
1
• Simplified form of union bound
53
Synchronization
• Synchronization
– Carrier synchronization
– Symbol/Bit synchronization
– Frame synchronization
– Network Synchronization
54

3/4/2018
28
Architecture of a (Digital) Communication System
55
Source A/Dconverter
Sourceencoder
Channelencoder Modulator
Channel
DetectorChanneldecoder
Sourcedecoder
D/Aconverter
User
Transmitter
Receiver
Absent ifsource isdigital
Noise
Contents
• Linear block code introduction
• Hamming codes
• Linear block codes
• Decoding of LBC
• Cyclic code, BCH code, R-S code
56

3/4/2018
29
Linear Block Code• : A block code of block length over an
alphabet χ is a non-empty set of -tuples of symbols from χ.– , . . . , , . . . , , . . . ,
– The -tuples of the code are called codewords.
• Rate:– channel alphabet: symbols– information symbols: tuples– number or codewords:
– code length: – rate
1log
– , code57
Hamming Distance• The Hamming distance between -tuples is the
number of components in which the n-tuples differ
, ∑ , , where ,1, if0, if
– , 0 with equality if and only if (nonnegativity)– , , (symmetry)– , , , (triangle inequality)– Hamming distance is a coarse or pessimistic measure of
difference.
• Other useful distances in error control coding:– , distance on a circle, is applicable to phase
shift coding.– ,is used with sensewords in .
58

3/4/2018
30
Minimum Distance• The minimum (Hamming) distance ∗ of a block
code is the minimum distance between any two codewords:
∗ min , ∶ , arecodewordsand
• Properties of minimum distance:– ∗ 1since Hamming distance between distinct codewords
is a positive integer.– ∗ if code has two or more codewords.– ∗ 1or ∗ ∞for the useless code with only one
codeword. (This is a convention, not a theorem.)– ∗ ∗ if ⊆ —smaller codes have larger (or
equal) minimum distance.
• The minimum distance of a code determines both error-detecting ability and error-correcting ability.
59
Error-detecting Ability• Suppose that a block code is used for error
detection only.– If the received -tuple is not a codeword, a detectable error
has occurred– If the received -tuple is a codeword but not the
transmitted codeword, an error has occurred that cannot be detected.
• : The guaranteed error-detecting ability is ∗ 1.
• The error-detecting ability is a worst case measure of the code.
60

3/4/2018
31
Error-correcting Ability (cont’d)• : Using nearest-neighbor decoding, errors of
weight t can be corrected if and only if 2 ∗. (For Hamming distance, equivalently, 2 1 ∗).
• : The “spheres” of radius surrounding the codewords do not overlap. Otherwise, there would be two codewords 2 distant. Therefore when errors occur, the decoder can unambiguously decide which codeword was sent.
61
Minimum Weight• The Hamming weight is the number of
nonzero components of .• Facts:
– 0,
– 1, 2 1 2 2 1
– 0if and only if 0
• Definition: The minimum (Hamming) weight of a block code is the weight of the nonzero codewordwith smallest weight:
min ∗ min ∶ ∈ , 0
• Examples of minimum weight:– Simple parity-check codes: ∗ 2.– Repetition codes: ∗ .– (7,4) Hamming code: ∗ 3. 62

3/4/2018
32
Minimum Distance = Minimum Weight• Theorem: For every linear block code, ∗ ∗.
Proof : We show that ∗ ∗ and ∗ ∗.– (≥) Let be a nonzero minimum-weight codeword. the 0
vector is a codeword, so∗ 0, ∗
– (≤) Let be two closest codewords. Then is a nonzero codeword, so
∗ , ∗
Combining these two inequalities, we obtain ∗ ∗.
• It is easier to find minimum weight than minimum distance because the weight minimization considers only a single parameter.
63
Syndrome (校正子) Decoding• Encoding for LBC is vector-matrix multiplication.• Maximum-likelihood decoding: maximize |• Decoding is inherently nonlinear. Fact: linear
decoders are very weak.• However, several steps in the decoding process are
linear:– syndrome computation– correction after error pattern and location have been found– extracting estimated message from estimated codeword
• Definition: The error vector or error pattern is the difference between the received -tuple and the transmitted codeword :
≜ ⇒ 64

3/4/2018
33
Syndrome Decoding (cont’d)• Multiply both sides of the equation by :
≜ 0 – The syndrome of the senseword is defined to be .– The syndrome of (known to receiver) equals the
syndrome of the error pattern e (not known to receiver but must be estimated).
• Decoding consists of finding the most plausible (貌似真实的) error pattern such that
• “Plausible” depends on the error characteristics:– For binary symmetric channel, most plausible means
smallest number of bit errors. Decoder picks error pattern of smallest weight satisfying .
– For bursty channels, error patterns are plausible if the symbol errors are close together.
65
Syndrome Decoding (cont’d)• Syndrome table decoding:
1. Calculate syndrome of received -tuple.2. Find most plausible error pattern with .3. Estimate transmitted codeword: .4. Determine message from the encoding equation .
• Only step 2 requires nonlinear operations.• For small values of , lookup tables can be used
for step 2.• Step 4 is not needed for systematic encoders, since
1: .
66

3/4/2018
34
Contents
• Convolutional code
– Review
– Viterbi decoder
– Examples of CC
• Construct long codes
• Turbo code
• LDPC code
67
CC Example• Rate-1/2 convolutional code
– The rational function is also element of the field 68

3/4/2018
35
Finite-state Transition Diagram (cont’d)
69
Viterbi Decoder Example• Rate-1/2 convolutional code
70
2 2( ) 1 1G D D D D
10,10, 00,01, 11, 01, 11

3/4/2018
36
Architecture of a (Digital) Communication System
71
Source A/Dconverter
Sourceencoder
Channelencoder Modulator
Channel
DetectorChanneldecoder
Sourcedecoder
D/Aconverter
User
Transmitter
Receiver
Absent ifsource isdigital
Noise
Contents
• Multiple access
– TDMA
– FDMA (OFDMA)
– CDMA
– SDMA
72