Embed Size (px)
Citation preview

電気学会論文誌 D(産業応用部門誌)IEEJ Transactions on Industry ApplicationsVol.137 No.12 pp.924–933 DOI: 10.1541/ieejias.137.924
論 文
自動列車運転装置を用いた省エネルギー運転制御手法の実証試験
正 員 渡邉翔一郎∗a) 非 会 員 佐藤 安弘∗ 正 員 古関 隆章∗∗
正 員 水間 毅∗∗∗ 非 会 員 田中 龍治∗∗∗∗ 正 員 宮路 佳浩∗∗∗∗
終身会員 磯部 栄介∗5
Vehicle Test for Verifying Energy-Saving Train Control Based on Automatic TrainOperation System
Shoichiro Watanabe∗a), Member, Yasuhiro Sato∗, Non-member, Takafumi Koseki∗∗, Member, Takeshi Mizuma∗∗∗, Member,
Ryuji Tanaka∗∗∗∗, Non-member, Yoshihiro Miyaji∗∗∗∗, Member, Eisuke Isobe∗5, Life Member
(2017年7月6日受付)
Recently, there has been an increasing interest in energy saving operations in railway systems due to its significant
advantages compared with strategies that involve the enhancement of hardware instruments. The authors focus on
Automatic Train Operation (ATO) as a suitable method to evaluate the effects of energy-saving operation under simple
conditions. The difference from other previous works is that the authors aim to conduct substantiative experiments on
track and design explicitly-considered energy-saving operations. The authors perform on-track tests to measure the
efficiency of the motors on trains and the measured values are used for numerical calculation to enhance accuracy. In
this study, an energy-saving ATO is designed and installed in rolling stocks. This designed ATO consists of the three
following methods: The first method is to install coasting in speed profiles and decrease the maximum speed by jerk
regulation. The second method is to use power-limiting braking in the braking section and increase the regenerative
energy. The third method is to update the notch control algorithm for using the motor effectively. The authors per-
form on-track tests to evaluate the energy-saving effect of the proposed method compared with conventional running
profiles.
キーワード:自動列車運転装置,リニアモータ駆動鉄道,運転手法,ジャーク制御,電力制限ブレーキ,惰行運転
Keywords: automatic train operation, linear motor railway system, driving operation method, jerk regulation, power-limiting brak-ing, coasting
a) Correspondence to: Shoichiro Watanabe. E-mail: [email protected]∗ 独立行政法人自動車技術総合機構交通安全環境研究所〒182-0012 東京都調布市深大寺東町 7-42-27National Traffic Safety and Environment Laboratory, Na-tional Agency for Automobile and Land Transport Technol-ogy7-42-27, Jindaiji-higashimachi, Chofu, Tokyo 182-0012,Japan
∗∗ 東京大学大学院工学系研究科電気系工学専攻〒113-8656 東京都文京区本郷 7-3-1Department of Electrical Engineering and Information Sys-tems, Graduate School of Engineering, The University ofTokyo7-3-1, Hongo, Bunkyo-ku, Tokyo 113-8656, Japan
∗∗∗ 東京大学大学院新領域創成科学研究科先端エネルギー工学専攻〒277-8561 千葉県柏市柏の葉 5-1-5
1. 序 論
〈1・1〉 電気鉄道に期待される省エネルギー技術
地球環境問題への意識の高まりから,持続可能な社会の実現に向けて省エネルギー技術の研究開発が進んでいる。
Department of Advanced Energy,Graduate School of FrontierSciences, The University of Tokyo5-1-5, Kashiwanoha, Kashiwa 277-8561, Japan
∗∗∗∗(株)日立製作所鉄道ビジネスユニット〒312-8506 茨城県ひたちなか市市毛 1070番地Rail Systems Business Unit, Hitachi, Ltd.1070, Ichige, Hitachinaka, Ibaraki 312-8506, Japan
∗5 日本地下鉄協会リニアメトロ推進本部〒101-0047 東京都千代田区内神田 2-10-12内神田すいすいビル 9階Linear Promoting Division, Japan Subway Association2-10-12, Uchikanda, Chiyoda-ku, Tokyo 101-0047, Japan
c© 2017 The Institute of Electrical Engineers of Japan. 924
省エネルギー運転制御手法の実証試験(渡邉翔一郎,他)
運輸部門で見ると,鉄道は少ないエネルギーで効率よく輸送することができ,環境親和性に優れた交通輸送手段である。特に電気鉄道では回生ブレーキ技術により列車の運動エネルギーを電気エネルギーとして再利用することができ,
その環境性能を高めている。
〈1・2〉 直流電気鉄道の省エネルギー化 大都市に普
及する電気鉄道の電力供給システムの多くは直流饋電である。この直流電気鉄道においては,電気機器・設備の改良と,運行管理・運転手法の工夫による省エネルギー化が研究されてきた。電気機器・設備の改良においては回生電力
を有効に活用するための蓄電装置に関する研究 (1)や列車の主回路制御に関する研究 (2)がある。一方で運行管理・運転手法の研究では,消費電力量に着目
した駅間走行時分の最適化 (3)や列車の走り方を工夫する省
エネルギー運転パターンの実証試験 (4)が行われている。著者らはこの運行管理・運転手法に注目し,理論的検討を進めてきた。
〈1・3〉 運行管理・運転手法の利点と研究動向 運行管理・運転手法のアプローチは提案手法を実用化するのに必要なコストが比較的小さく,またその省エネルギー効果は
大きいことが利点である (5)。したがって運転パターンの最適化研究 (6) (7)や鉄道事業者による運転工夫の取り組み (8) (9),メーカによる手動運転への運転支援の研究開発 (10)も進み,
近年運行管理・運転手法は注目を集めている研究分野である。鉄道車両は運転士による手動運転で運行されることが多いが,運転パターンに関する研究ではその理論が比較的検討しやすく,結果が馴染みやすいケーススタディとして
列車の運転操作をコンピュータで制御する自動列車運転装置(ATO:Automatic Train Operation)を備えた路線に着目した研究も積極的に行われている (11)~(16)。
2. 著者らの先行研究での検討と本研究の目的
〈2・1〉 理論的検討 前章で述べた通り,ATOは理論的検討を簡潔な条件下で,一般論として評価するのに適し
ている。著者らの先行研究 (17)~(19)では営業路線での実証試験を前提に,次章で説明する省エネルギー運転手法を取り入れた ATO制御器を設計した。提案手法の初段階の実証には,天候をはじめとする外乱
の少ない路線が適切と考え,地下鉄を対象路線に選定した。提案手法を評価するには,消費電力量に高い感度で影響する駅間走行時分を秒オーダで合わせる必要がある。そこで高精度な計算手法を確立するために,先行研究 (17) (19)では実
証試験対象車両ならびにその路線にて事前試験を行い,必要なパラメータの取得を行った。この結果,事前試験の走行結果と数値計算結果の消費電力量の差は 5%以内になった (19)。これにより ATO設計に必要な数値計算の準備が整
い,提案手法を考慮した ATO制御器を設計した。ATO制御器の設計に際しては実務制約を考慮する必要が
ある。本稿での実務制約とは,( 1)安全性を確保するため
の制約,( 2)鉄道事業者の規則に適合するための制約,( 3)
車両機器の応答性能を考慮した制約の 3つを指す。先行研究 (17)~(19)ではこれらの制約を論理的に整理し,理論検討の段階で制約条件として検討した。これらの検討は提案手法の今後の早期の技術普及のために重要である。
〈2・2〉 本研究の目的 運行管理・運転手法のアプローチによる電気鉄道の省エネルギー化の核心は,「限られた駅間走行時分内で,どれだけ省エネルギー運転制御手法に時
間を割り当てられるか」である。本研究では割り当てる時間を増やす手法と,省エネルギー運転制御手法を述べ,その論理が適切であることを実証試験結果に基づいて説明する。本研究では提案する手法の一般性および有用性を示すた
めに,先行研究 (17) (19)の理論的検討を実証試験にて検証し,同一走行時分で電力量を評価することを目的とする。そして,提案手法が制約条件として考慮した実務制約を満たすことを示す。
本研究では営業路線の始発駅から終着駅まで,往復合計30駅間分の実証試験を行った結果を示す。そして実務制約の条件を満たしつつ,現行の駅間走行時分において省エネルギー運転パターンを適用することにより消費電力量が削
減されることを示す。そしてその中から 2駅間を代表して抜粋し,提案手法の効果を詳細に分析,考察する。
3. 省エネルギー効果と時間の関係
〈3・1〉 用語の定義 電気鉄道の運転手法の工夫による省エネルギー効果は時間と密接な関係にある。この関係
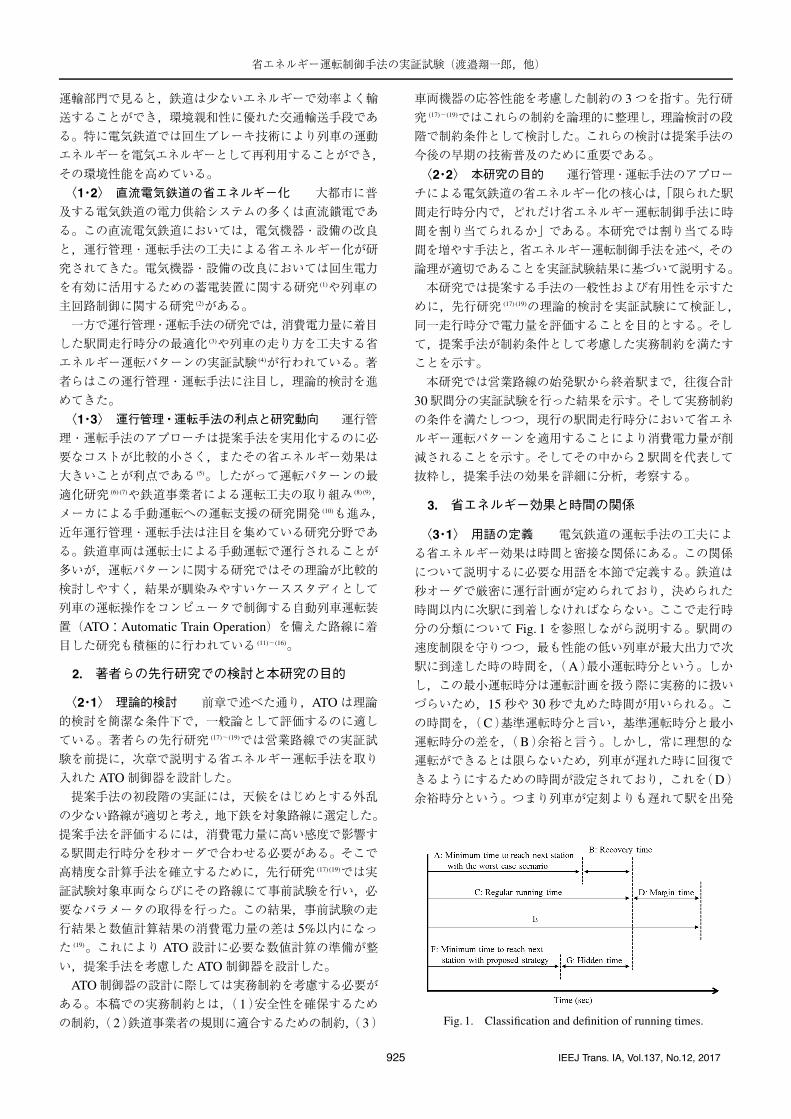
について説明するに必要な用語を本節で定義する。鉄道は秒オーダで厳密に運行計画が定められており,決められた時間以内に次駅に到着しなければならない。ここで走行時分の分類について Fig. 1を参照しながら説明する。駅間の
速度制限を守りつつ,最も性能の低い列車が最大出力で次駅に到達した時の時間を,(A)最小運転時分という。しかし,この最小運転時分は運転計画を扱う際に実務的に扱いづらいため,15秒や 30秒で丸めた時間が用いられる。こ
の時間を,(C)基準運転時分と言い,基準運転時分と最小運転時分の差を,(B)余裕と言う。しかし,常に理想的な運転ができるとは限らないため,列車が遅れた時に回復で
きるようにするための時間が設定されており,これを(D)余裕時分という。つまり列車が定刻よりも遅れて駅を出発
Fig. 1. Classification and definition of running times.
925 IEEJ Trans. IA, Vol.137, No.12, 2017
省エネルギー運転制御手法の実証試験(渡邉翔一郎,他)
した場合,あるいは定刻に出発しても途中の安全確認等で減速した場合には,余裕時分を用いて回復運転を行い,(E)に示す時間内に次駅に到着すればその先は定刻通り運転することができる。そして列車が出発駅から到着駅まで走行
するのに要する時間を駅間走行時分と呼ぶ。
〈3・2〉 埋蔵時分(hidden time) 実際には,列車の走行性能は先述の最小運転時分で基準とした車両性能よりも
良いため,(F)で示す時間で次駅に到着することが可能である。したがって(G)に示すように次駅に到着するまで時間に自由度が得られ,駅間走行時分内で走り方を変更する,乗り心地を重視して操作を緩やかにする等の工夫をするこ
とができる。加えて,後に述べる列車運転制御法を工夫すればその時間を生み出すことができ,より大きな自由度を得ることができる。この(G)で表される時間を本研究では埋蔵時分(hidden time)と名付ける。したがって,この埋
蔵時分をうまく活用して運転操作を工夫し,次駅に定刻に到着する手法が省エネルギーな列車運転制御法である。なお,基準運転時分など,時間の呼び方は鉄道事業者に
よって異なる。そこで本研究では文献 (20)~ (22)を参考に用語を定義した。
4. 提案手法
本章では本稿で明らかにする範囲の提案手法について説明する。著者らの研究では(1)駅間走行時分を安全に確保
する手法,( 2)埋蔵時分を有効に活用して列車の走り方を工夫する手法,( 3)駅間走行時分の最適化 (3)の手法について実証試験を行った。本稿では上記の( 1)( 2)を考察する。詳細は先行研究の文献 (17)~ (19)に譲り,本章では概要を
説明する。
〈4・1〉 駅間走行時分を安全に確保する手法 列車運転制御法を工夫して省エネルギー効果を得るためには埋蔵時
分を適切に活用することが重要である。その埋蔵時分は鉄道事業者によって予め運行計画に含まれていると考えられるが,列車運転制御法を工夫することでより多くの埋蔵時分を得ることができる。もしくは,駅間走行時分が少ない
ため走り方を工夫する余地がない駅間であっても〈4・2〉に述べる提案手法を適用することにより走り方を工夫し,埋蔵時分を生み出すことができる。本研究ではジャーク制御を改良し,乗り心地を維持しつつ列車が駅を出発する始動
時の低速域の時間を節約して埋蔵時分を生み出す。
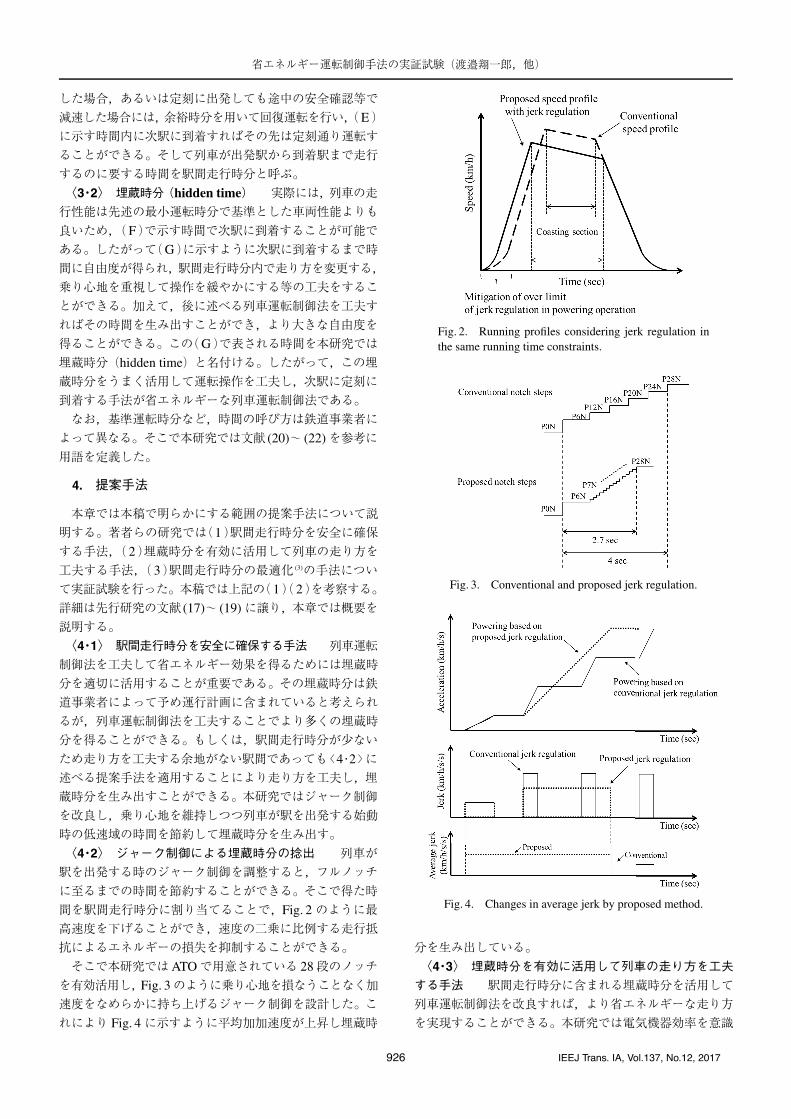
〈4・2〉 ジャーク制御による埋蔵時分の捻出 列車が駅を出発する時のジャーク制御を調整すると,フルノッチ
に至るまでの時間を節約することができる。そこで得た時間を駅間走行時分に割り当てることで,Fig. 2のように最高速度を下げることができ,速度の二乗に比例する走行抵抗によるエネルギーの損失を抑制することができる。
そこで本研究ではATOで用意されている 28段のノッチを有効活用し,Fig. 3のように乗り心地を損なうことなく加速度をなめらかに持ち上げるジャーク制御を設計した。こ
れにより Fig. 4に示すように平均加加速度が上昇し埋蔵時
Fig. 2. Running profiles considering jerk regulation inthe same running time constraints.
Fig. 3. Conventional and proposed jerk regulation.
Fig. 4. Changes in average jerk by proposed method.
分を生み出している。
〈4・3〉 埋蔵時分を有効に活用して列車の走り方を工夫
する手法 駅間走行時分に含まれる埋蔵時分を活用して列車運転制御法を改良すれば,より省エネルギーな走り方
を実現することができる。本研究では電気機器効率を意識
926 IEEJ Trans. IA, Vol.137, No.12, 2017
省エネルギー運転制御手法の実証試験(渡邉翔一郎,他)
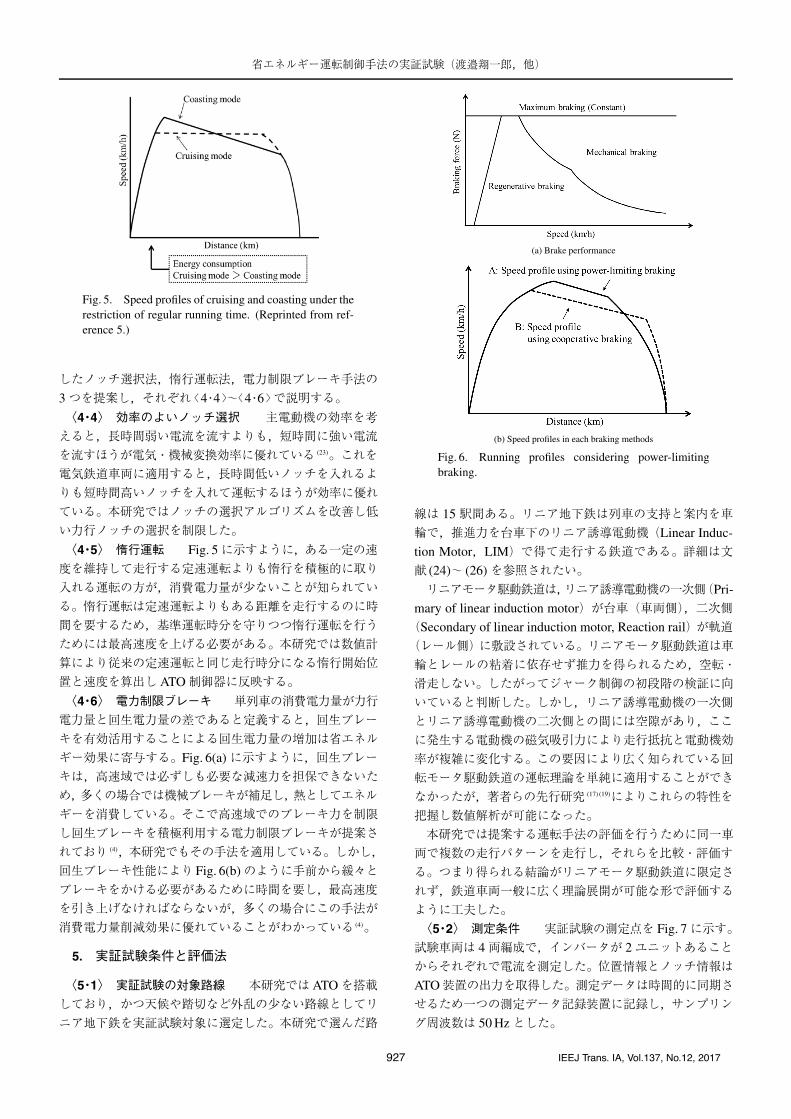
Fig. 5. Speed profiles of cruising and coasting under therestriction of regular running time. (Reprinted from ref-erence 5.)
したノッチ選択法,惰行運転法,電力制限ブレーキ手法の
3つを提案し,それぞれ〈4・4〉~〈4・6〉で説明する。
〈4・4〉 効率のよいノッチ選択 主電動機の効率を考えると,長時間弱い電流を流すよりも,短時間に強い電流を流すほうが電気・機械変換効率に優れている (23)。これを電気鉄道車両に適用すると,長時間低いノッチを入れるよ
りも短時間高いノッチを入れて運転するほうが効率に優れている。本研究ではノッチの選択アルゴリズムを改善し低い力行ノッチの選択を制限した。
〈4・5〉 惰行運転 Fig. 5に示すように,ある一定の速度を維持して走行する定速運転よりも惰行を積極的に取り
入れる運転の方が,消費電力量が少ないことが知られている。惰行運転は定速運転よりもある距離を走行するのに時間を要するため,基準運転時分を守りつつ惰行運転を行う
ためには最高速度を上げる必要がある。本研究では数値計算により従来の定速運転と同じ走行時分になる惰行開始位置と速度を算出し ATO制御器に反映する。
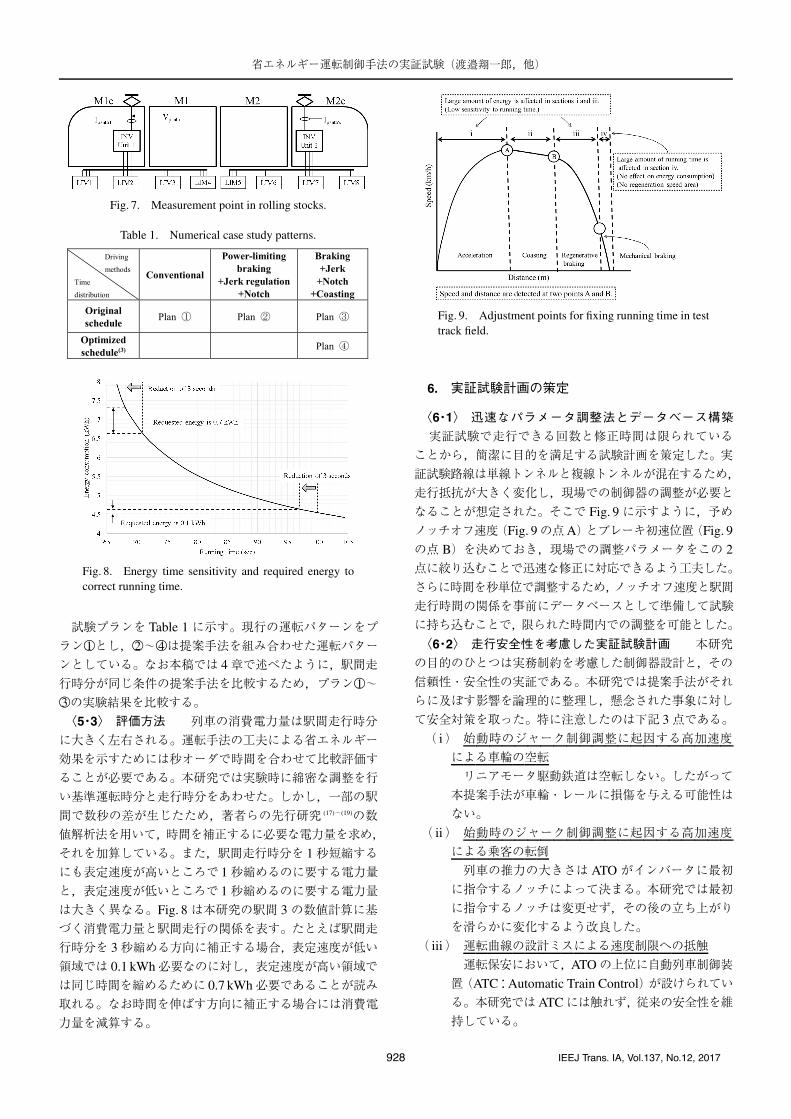
〈4・6〉 電力制限ブレーキ 単列車の消費電力量が力行電力量と回生電力量の差であると定義すると,回生ブレー
キを有効活用することによる回生電力量の増加は省エネルギー効果に寄与する。Fig. 6(a)に示すように,回生ブレーキは,高速域では必ずしも必要な減速力を担保できないため,多くの場合では機械ブレーキが補足し,熱としてエネル
ギーを消費している。そこで高速域でのブレーキ力を制限し回生ブレーキを積極利用する電力制限ブレーキが提案されており (4),本研究でもその手法を適用している。しかし,回生ブレーキ性能により Fig. 6(b)のように手前から緩々と
ブレーキをかける必要があるために時間を要し,最高速度を引き上げなければならないが,多くの場合にこの手法が消費電力量削減効果に優れていることがわかっている (4)。
5. 実証試験条件と評価法
〈5・1〉 実証試験の対象路線 本研究では ATOを搭載しており,かつ天候や踏切など外乱の少ない路線としてリ
ニア地下鉄を実証試験対象に選定した。本研究で選んだ路
(a) Brake performance
(b) Speed profiles in each braking methods
Fig. 6. Running profiles considering power-limitingbraking.
線は 15駅間ある。リニア地下鉄は列車の支持と案内を車輪で,推進力を台車下のリニア誘導電動機(Linear Induc-
tion Motor,LIM)で得て走行する鉄道である。詳細は文献 (24)~ (26)を参照されたい。
リニアモータ駆動鉄道は,リニア誘導電動機の一次側(Pri-
mary of linear induction motor)が台車(車両側),二次側(Secondary of linear induction motor, Reaction rail)が軌道(レール側)に敷設されている。リニアモータ駆動鉄道は車
輪とレールの粘着に依存せず推力を得られるため,空転・滑走しない。したがってジャーク制御の初段階の検証に向いていると判断した。しかし,リニア誘導電動機の一次側
とリニア誘導電動機の二次側との間には空隙があり,ここに発生する電動機の磁気吸引力により走行抵抗と電動機効率が複雑に変化する。この要因により広く知られている回転モータ駆動鉄道の運転理論を単純に適用することができ
なかったが,著者らの先行研究 (17) (19)によりこれらの特性を把握し数値解析が可能になった。本研究では提案する運転手法の評価を行うために同一車両で複数の走行パターンを走行し,それらを比較・評価す
る。つまり得られる結論がリニアモータ駆動鉄道に限定されず,鉄道車両一般に広く理論展開が可能な形で評価するように工夫した。
〈5・2〉 測定条件 実証試験の測定点を Fig. 7に示す。試験車両は 4両編成で,インバータが 2ユニットあること
からそれぞれで電流を測定した。位置情報とノッチ情報はATO装置の出力を取得した。測定データは時間的に同期させるため一つの測定データ記録装置に記録し,サンプリン
グ周波数は 50 Hzとした。
927 IEEJ Trans. IA, Vol.137, No.12, 2017
省エネルギー運転制御手法の実証試験(渡邉翔一郎,他)
Fig. 7. Measurement point in rolling stocks.
Table 1. Numerical case study patterns.
Fig. 8. Energy time sensitivity and required energy tocorrect running time.
試験プランを Table 1に示す。現行の運転パターンをプラン 1©とし, 2©~ 4©は提案手法を組み合わせた運転パターンとしている。なお本稿では 4章で述べたように,駅間走
行時分が同じ条件の提案手法を比較するため,プラン 1©~3©の実験結果を比較する。〈5・3〉 評価方法 列車の消費電力量は駅間走行時分
に大きく左右される。運転手法の工夫による省エネルギー効果を示すためには秒オーダで時間を合わせて比較評価することが必要である。本研究では実験時に綿密な調整を行い基準運転時分と走行時分をあわせた。しかし,一部の駅
間で数秒の差が生じたため,著者らの先行研究 (17)~(19)の数値解析法を用いて,時間を補正するに必要な電力量を求め,それを加算している。また,駅間走行時分を 1秒短縮するにも表定速度が高いところで 1秒縮めるのに要する電力量
と,表定速度が低いところで 1秒縮めるのに要する電力量は大きく異なる。Fig. 8は本研究の駅間 3の数値計算に基づく消費電力量と駅間走行の関係を表す。たとえば駅間走行時分を 3秒縮める方向に補正する場合,表定速度が低い
領域では 0.1 kWh必要なのに対し,表定速度が高い領域では同じ時間を縮めるために 0.7 kWh必要であることが読み取れる。なお時間を伸ばす方向に補正する場合には消費電
力量を減算する。
Fig. 9. Adjustment points for fixing running time in testtrack field.
6. 実証試験計画の策定
〈6・1〉 迅速なパラメータ調整法とデータベース構築
実証試験で走行できる回数と修正時間は限られている
ことから,簡潔に目的を満足する試験計画を策定した。実証試験路線は単線トンネルと複線トンネルが混在するため,走行抵抗が大きく変化し,現場での制御器の調整が必要と
なることが想定された。そこで Fig. 9に示すように,予めノッチオフ速度(Fig. 9の点A)とブレーキ初速位置(Fig. 9
の点 B)を決めておき,現場での調整パラメータをこの 2
点に絞り込むことで迅速な修正に対応できるよう工夫した。
さらに時間を秒単位で調整するため,ノッチオフ速度と駅間走行時間の関係を事前にデータベースとして準備して試験に持ち込むことで,限られた時間内での調整を可能とした。
〈6・2〉 走行安全性を考慮した実証試験計画 本研究の目的のひとつは実務制約を考慮した制御器設計と,その
信頼性・安全性の実証である。本研究では提案手法がそれらに及ぼす影響を論理的に整理し,懸念された事象に対して安全対策を取った。特に注意したのは下記 3点である。( i) 始動時のジャーク制御調整に起因する高加速度
による車輪の空転リニアモータ駆動鉄道は空転しない。したがって本提案手法が車輪・レールに損傷を与える可能性は
ない。( ii) 始動時のジャーク制御調整に起因する高加速度
による乗客の転倒列車の推力の大きさは ATO がインバータに最初
に指令するノッチによって決まる。本研究では最初に指令するノッチは変更せず,その後の立ち上がりを滑らかに変化するよう改良した。
( iii) 運転曲線の設計ミスによる速度制限への抵触
運転保安において,ATOの上位に自動列車制御装置(ATC:Automatic Train Control)が設けられている。本研究ではATCには触れず,従来の安全性を維持している。
928 IEEJ Trans. IA, Vol.137, No.12, 2017
省エネルギー運転制御手法の実証試験(渡邉翔一郎,他)
7. 実証試験結果
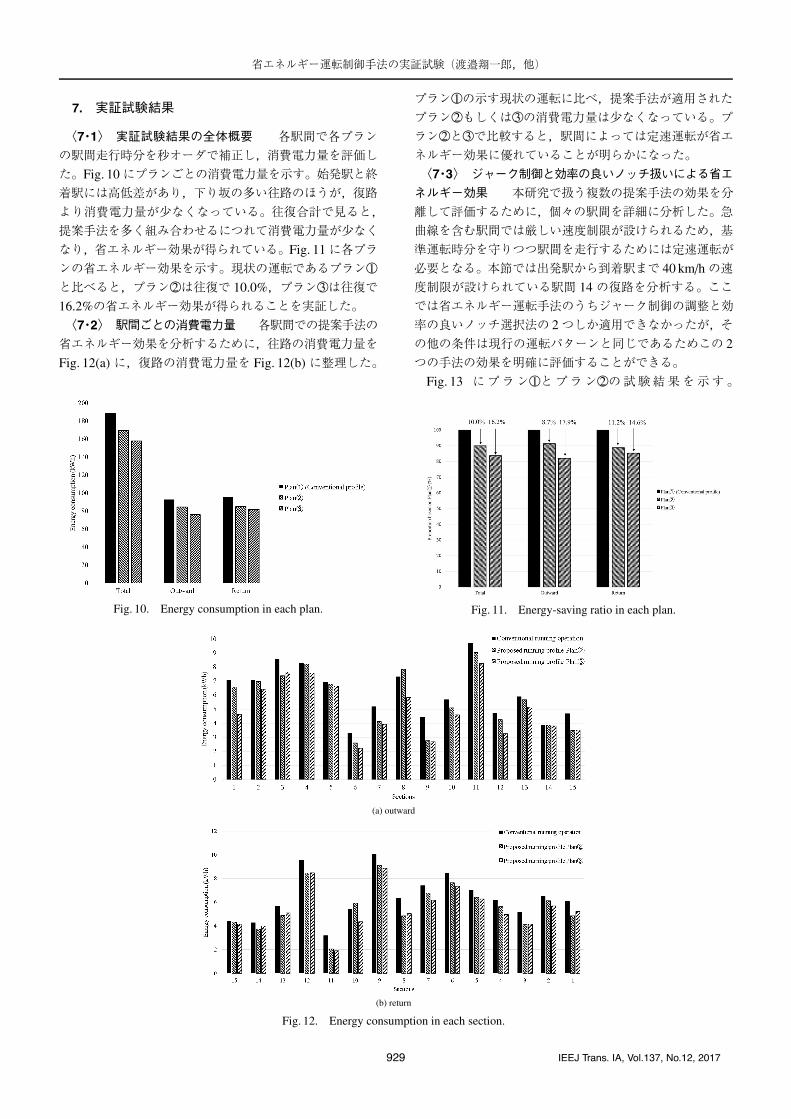
〈7・1〉 実証試験結果の全体概要 各駅間で各プランの駅間走行時分を秒オーダで補正し,消費電力量を評価した。Fig. 10にプランごとの消費電力量を示す。始発駅と終着駅には高低差があり,下り坂の多い往路のほうが,復路
より消費電力量が少なくなっている。往復合計で見ると,提案手法を多く組み合わせるにつれて消費電力量が少なくなり,省エネルギー効果が得られている。Fig. 11に各プランの省エネルギー効果を示す。現状の運転であるプラン 1©と比べると,プラン 2©は往復で 10.0%,プラン 3©は往復で16.2%の省エネルギー効果が得られることを実証した。
〈7・2〉 駅間ごとの消費電力量 各駅間での提案手法の省エネルギー効果を分析するために,往路の消費電力量を
Fig. 12(a)に,復路の消費電力量を Fig. 12(b)に整理した。
Fig. 10. Energy consumption in each plan.
プラン 1©の示す現状の運転に比べ,提案手法が適用されたプラン 2©もしくは 3©の消費電力量は少なくなっている。プラン 2©と 3©で比較すると,駅間によっては定速運転が省エネルギー効果に優れていることが明らかになった。
〈7・3〉 ジャーク制御と効率の良いノッチ扱いによる省エ
ネルギー効果 本研究で扱う複数の提案手法の効果を分離して評価するために,個々の駅間を詳細に分析した。急曲線を含む駅間では厳しい速度制限が設けられるため,基準運転時分を守りつつ駅間を走行するためには定速運転が
必要となる。本節では出発駅から到着駅まで 40 km/hの速度制限が設けられている駅間 14の復路を分析する。ここでは省エネルギー運転手法のうちジャーク制御の調整と効率の良いノッチ選択法の 2つしか適用できなかったが,そ
の他の条件は現行の運転パターンと同じであるためこの 2
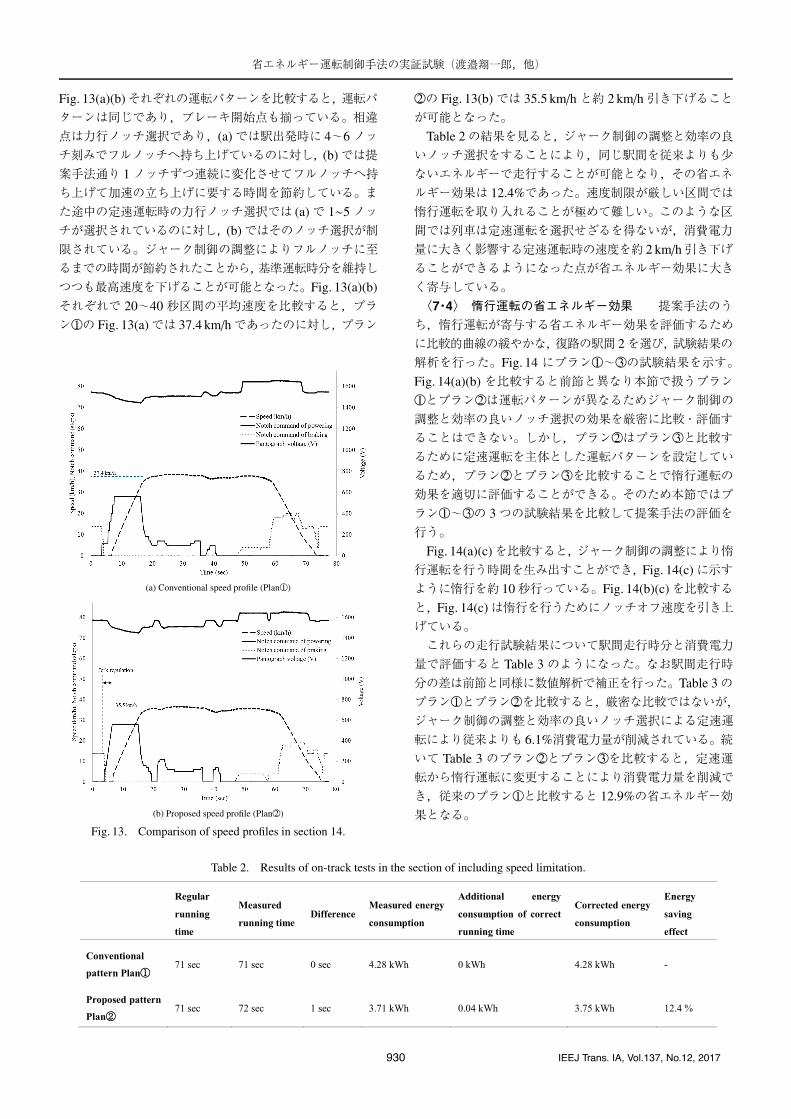
つの手法の効果を明確に評価することができる。Fig. 13 にプラン 1©とプラン 2©の試験結果を示す。
Fig. 11. Energy-saving ratio in each plan.
(a) outward
(b) return
Fig. 12. Energy consumption in each section.
929 IEEJ Trans. IA, Vol.137, No.12, 2017
省エネルギー運転制御手法の実証試験(渡邉翔一郎,他)
Fig. 13(a)(b)それぞれの運転パターンを比較すると,運転パターンは同じであり,ブレーキ開始点も揃っている。相違点は力行ノッチ選択であり,(a)では駅出発時に 4~6ノッチ刻みでフルノッチへ持ち上げているのに対し,(b)では提
案手法通り 1ノッチずつ連続に変化させてフルノッチへ持ち上げて加速の立ち上げに要する時間を節約している。また途中の定速運転時の力行ノッチ選択では (a)で 1∼5ノッチが選択されているのに対し,(b)ではそのノッチ選択が制
限されている。ジャーク制御の調整によりフルノッチに至るまでの時間が節約されたことから,基準運転時分を維持しつつも最高速度を下げることが可能となった。Fig. 13(a)(b)
それぞれで 20~40秒区間の平均速度を比較すると,プラン 1©の Fig. 13(a)では 37.4 km/hであったのに対し,プラン
(a) Conventional speed profile (Plan 1©)
(b) Proposed speed profile (Plan 2©)
Fig. 13. Comparison of speed profiles in section 14.
Table 2. Results of on-track tests in the section of including speed limitation.
2©の Fig. 13(b)では 35.5 km/hと約 2 km/h引き下げることが可能となった。
Table 2の結果を見ると,ジャーク制御の調整と効率の良いノッチ選択をすることにより,同じ駅間を従来よりも少
ないエネルギーで走行することが可能となり,その省エネルギー効果は 12.4%であった。速度制限が厳しい区間では惰行運転を取り入れることが極めて難しい。このような区間では列車は定速運転を選択せざるを得ないが,消費電力
量に大きく影響する定速運転時の速度を約 2 km/h引き下げることができるようになった点が省エネルギー効果に大きく寄与している。
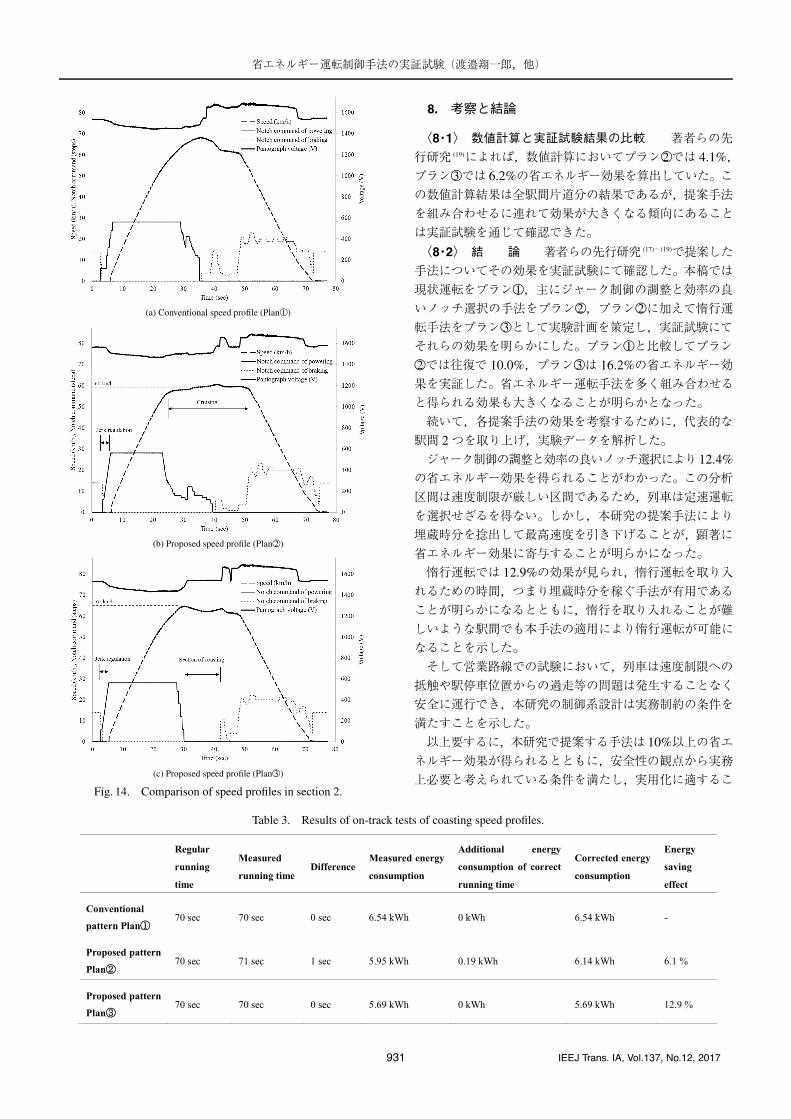
〈7・4〉 惰行運転の省エネルギー効果 提案手法のうち,惰行運転が寄与する省エネルギー効果を評価するために比較的曲線の緩やかな,復路の駅間 2を選び,試験結果の解析を行った。Fig. 14 にプラン 1©~ 3©の試験結果を示す。Fig. 14(a)(b)を比較すると前節と異なり本節で扱うプラン1©とプラン 2©は運転パターンが異なるためジャーク制御の調整と効率の良いノッチ選択の効果を厳密に比較・評価することはできない。しかし,プラン 2©はプラン 3©と比較するために定速運転を主体とした運転パターンを設定しているため,プラン 2©とプラン 3©を比較することで惰行運転の効果を適切に評価することができる。そのため本節ではプラン 1©~ 3©の 3つの試験結果を比較して提案手法の評価を
行う。Fig. 14(a)(c)を比較すると,ジャーク制御の調整により惰行運転を行う時間を生み出すことができ,Fig. 14(c)に示すように惰行を約 10秒行っている。Fig. 14(b)(c)を比較する
と,Fig. 14(c)は惰行を行うためにノッチオフ速度を引き上げている。これらの走行試験結果について駅間走行時分と消費電力量で評価すると Table 3のようになった。なお駅間走行時
分の差は前節と同様に数値解析で補正を行った。Table 3のプラン 1©とプラン 2©を比較すると,厳密な比較ではないが,ジャーク制御の調整と効率の良いノッチ選択による定速運
転により従来よりも 6.1%消費電力量が削減されている。続いて Table 3 のプラン 2©とプラン 3©を比較すると,定速運転から惰行運転に変更することにより消費電力量を削減でき,従来のプラン 1©と比較すると 12.9%の省エネルギー効
果となる。
930 IEEJ Trans. IA, Vol.137, No.12, 2017
省エネルギー運転制御手法の実証試験(渡邉翔一郎,他)
(a) Conventional speed profile (Plan 1©)
(b) Proposed speed profile (Plan 2©)
(c) Proposed speed profile (Plan 3©)
Fig. 14. Comparison of speed profiles in section 2.
Table 3. Results of on-track tests of coasting speed profiles.
8. 考察と結論
〈8・1〉 数値計算と実証試験結果の比較 著者らの先行研究 (19)によれば,数値計算においてプラン2©では 4.1%,プラン 3©では 6.2%の省エネルギー効果を算出していた。この数値計算結果は全駅間片道分の結果であるが,提案手法
を組み合わせるに連れて効果が大きくなる傾向にあることは実証試験を通じて確認できた。
〈8・2〉 結 論 著者らの先行研究 (17)~(19)で提案した手法についてその効果を実証試験にて確認した。本稿では
現状運転をプラン 1©,主にジャーク制御の調整と効率の良いノッチ選択の手法をプラン 2©,プラン 2©に加えて惰行運転手法をプラン 3©として実験計画を策定し,実証試験にてそれらの効果を明らかにした。プラン 1©と比較してプラン2©では往復で 10.0%,プラン 3©は 16.2%の省エネルギー効果を実証した。省エネルギー運転手法を多く組み合わせると得られる効果も大きくなることが明らかとなった。続いて,各提案手法の効果を考察するために,代表的な
駅間 2つを取り上げ,実験データを解析した。ジャーク制御の調整と効率の良いノッチ選択により 12.4%
の省エネルギー効果を得られることがわかった。この分析区間は速度制限が厳しい区間であるため,列車は定速運転
を選択せざるを得ない。しかし,本研究の提案手法により埋蔵時分を捻出して最高速度を引き下げることが,顕著に省エネルギー効果に寄与することが明らかになった。惰行運転では 12.9%の効果が見られ,惰行運転を取り入
れるための時間,つまり埋蔵時分を稼ぐ手法が有用であることが明らかになるとともに,惰行を取り入れることが難しいような駅間でも本手法の適用により惰行運転が可能に
なることを示した。そして営業路線での試験において,列車は速度制限への抵触や駅停車位置からの過走等の問題は発生することなく安全に運行でき,本研究の制御系設計は実務制約の条件を
満たすことを示した。以上要するに,本研究で提案する手法は 10%以上の省エネルギー効果が得られるとともに,安全性の観点から実務上必要と考えられている条件を満たし,実用化に適するこ
931 IEEJ Trans. IA, Vol.137, No.12, 2017
省エネルギー運転制御手法の実証試験(渡邉翔一郎,他)
とが実証された。〈8・3〉 今後の課題 著者らの先行研究 (17)ではプラン
4©で示した駅間走行時分の配分最適化を提案している。研究分析を進め,運行管理・運転手法の省エネルギー効果を
明らかにしていきたい。謝 辞
本研究は平成 28年度日本学術振興会(JSPS)科研費–特別研究員奨励費 JP16J07015の支援を受けたものである。研
究支援に感謝申し上げる。また実証試験に協力いただいたリニア地下鉄事業者をはじめとする関係者のご協力,ご指導に感謝申し上げる。
文 献
( 1) 菊地拓哉・名村伸生・高木 亮:「ラインリセプティビティ推定を用いた直流電鉄用地上型蓄電装置の充放電制御の基礎検討」,電学交通・電気鉄道・フィジカルセンサ合同研, TER-16-17, PHS16-11, pp.51–55(2016)
( 2) 小林宏泰・齋藤達仁・松尾健太郎・秋田真佑・近藤圭一郎・鈴木剛志・岩崎哲也・渡辺 翔・津村哲広・山口 秀・安藤敏哉:「軽負荷回生制御の改良による遠方負荷への回生電力供給能力向上に関する現車試験」,電学交通・電気鉄道・フィジカルセンサ合同研, TER-16-16,PHS16-10, pp.45–50 (2016)
( 3) M. Miyatake: “A Simple Mathematical Model for Energy-saving TrainScheduling”, IEEJ Trans. IA, Vol.131, pp.860–861 (2011)
( 4) S. Watanabe, Z. Yang, T. Koseki, K. Kondo, T. Mizuma, and Y. Hamazaki:“Experimental verification of power-limiting brake: Energy-saving train op-eration assistance”, IEEJ Trans. IA, Vol.134, No.8, pp.767–775 (2014) (inJapanese)渡邉翔一郎・他:「現車試験による電力制限ブレーキの性能評価:—
電気鉄道の省エネルギー運転支援効果の実証—」,電学論 D, Vol.134,No.8, pp.767–775 (2014)
( 5) 渡邉翔一郎・宮武昌史・高木 亮・小川知行:「運転方法の工夫による直流電気鉄道車両の消費電力量変化の実態把握」,平成 28 年電学産業応用部門大会シンポジウム「鉄道事業におけるエネルギー消費の実態把握」,鉄道電気利用における省エネルギー・新エネルギー技術の効果の検証調査専門委員会, 5-S1-5,群馬 (2016)
( 6) V. Doan, S. Watanabe, and T. Koseki: “The design of an optimal runningcurve for train operation based on a novel parameterization method aimingto minimize the total energy consumption”, Computers in Railways XIV:Railway Engineering Design and Optimization, Vol.135, p.175 (2014)
( 7) H. Ko, T. Koseki, and M. Miyatake: “Numerical study on dynamic program-ming applied to optimization of running profile of a train”, IEEJ Trans. IA,Vol.125, pp.1084–1092 (2005)
( 8) 井関一隆:「JR 西日本における電力削減に向けた挑戦:運転士とともに(特集鉄道の電力技術)」, 鉄道車両と技術, Vol.19, No.3, pp.2–8(2013)
( 9) 濱﨑康宏:「新京成電鉄における省電力への取り組み(特集回生エネルギー)」,鉄道車両と技術, Vol.18, No.12, pp.15–21 (2012)
(10) 富川英朝・角谷彰彦・竹葉豊幸・三吉 京:「運転支援—海外における省エネ運転実証試験—」,平成 27 年電学産業応用部門大会講演論文集, pp.65–70 (2015)
(11) Gu, Qing, et al.: “Energy-efficient train operation in urban rail transit us-ing real-time traffic information”, Intelligent Transportation Systems, IEEETransactions on 15.3, pp.1216–1233 (2014)
(12) J. Yin, D. Chen, and L. Li: “Intelligent Train Operation Algorithms for Sub-way by Expert System and Reinforcement Learning”, IEEE Trans. on Intel-ligent Transportation Systems, Vol.15, No.6, pp.2561–2571 (2014)
(13) G. Qing, M. Yu, and M. Fei: “Energy Saving for Automatic Train Controlin Moving Block Signaling System”, China Communications, Vol.11, No.2,pp.12–22 (2014)
(14) F.-R. Adrian, et al.: “Design of Robust and Energy-Efficient ATO Speed Pro-files of Metropolitan Lines Considering Train Load Variations and Delays”,The Journal of Intelligent Transportation Systems, Vol.16, pp.2061–2071(2015)
(15) W. Carvajal-Carreno, A.P. Cucala, and A. Fernandez-Cardador: “Optimaldesign of energy-efficient ATO CBTC driving for metro lines based onNSGA-II with fuzzy parameters”, Eng Appl Artif Intell, Vol.36, pp.164–177(2014)
(16) M. Dominguez, A. Fernandez, A.P. Cucala, and P. Lukaszewicz: “Optimaldesign of metro automatic train operation speed profiles for reducing en-ergy consumption”, Proc. of the Institution of Mechanical Engineers PartF-Journal of Rail and Rapid Transit, Vol.225, No.F5, pp.463–473 (2011)
(17) 渡邉翔一郎・古関隆章・磯部栄介:「リニア駆動鉄道の電力変換効率測定による省エネルギー運転手法の効果の推定」,平成 28 年電学産業応用部門大会, 5-37,群馬 (2016)
(18) 渡邉翔一郎・古関隆章・田中龍治・磯部栄介:「自動列車運転装置を用いた省エネルギー運転制御手法の実証試験」, 電学交通・電気鉄道/ITS 合同研, TER-16-070, ITS-16-049, pp.35–40 (2016)
(19) S. Watanabe, T. Koseki, and E. Isobe: “Evaluation of Automatic TrainOperation Design for Energy-Saving Based on the Measured Efficiency ofLinear-Motor Train”, IEEJ Trans. IA, Vol.137, No.6, pp.460–468 (2017) (inJapanese)渡邉翔一郎・古関隆章・磯部栄介:「リニア駆動鉄道の効率測定結果に基づく省エネルギー ATO の設計と性能評価」, 電学論 D, Vol.137,No.6, pp.460–468 (2017)
(20) 富井規夫:「列車ダイヤのひみつ:定時運行のしくみ」, pp.11–111,成山堂 (2005)
(21) 電気学会・鉄道における運行計画・運行管理業務高度化に関する調査専門委員会編:「鉄道ダイヤ回復の技術」, pp.1–30,オーム社 (2010)
(22) 富井規夫:「鉄道ダイヤのつくりかた」, pp.43–78,オーム社 (2012)(23) K. Kondo, S. Kinoshita, M. Miyatake, and K. Yoshimoto: “Similar and par-
ticular Power Electronics Technologies Between Automobile Traction andRailway Vehice Traciton”, The Papers of Technical Meeting on VehicleTechnology IEE Japan (2009)
(24) S. Watanabe, T. Koseki, Y. Noda, and M. Miyatake: “Optimized Energy-Saving Speed Profile in Linear-Motor Railway System”, IEEJ Trans. IA,Vol.137, No.1, pp.44–52 (2017) (in Japanese)渡邉翔一郎・古関隆章・野田慶親・宮武昌史:「リニア駆動鉄道の最適省エネルギー運転曲線」,電学論 D, Vol.137, No.1, pp.44–52 (2017)
(25) S. Nonaka and K. Yoshida: “Analysis of Double-sided Linear Motors”,The Journal of the Institute of Electrical Engineers of Japan, Vol.90, No.5,pp.880–889 (1970) (in Japanese)野中作太郎・吉田欣二郎:「両側式リニアモータの特性解析」, 電学誌, Vol.90, No.5, pp.880–889 (1970)
(26) N. Fujii, I. Hirata, K. Kawamura, and K. Nishimura: “Investigation of HighPerformance Drive of Linear Motor Train for Urban Transit”, IEEJ Trans.IA, Vol.114, No.9, pp.910–917 (1994) (in Japanese)藤井信男・平田征生・河村憲太郎・西村晃一郎:「リニアモータ電車の高性能推進方式についての検討」,電学論 D, Vol.114, No.9, pp.910–917(1994)
渡 邉 翔一郎 (正員) 1989 年生。2017 年 3月東京大学大学院
工学系研究科電気系工学専攻博士課程修了。博士
(工学)。2017 年 4 月独立行政法人自動車技術総
合機構交通安全環境研究所入所。電気鉄道の運転
理論,自動列車運転制御による省エネルギー運転
に関する実証研究に従事。IAROR 会員,電気学
会鉄道電気利用における省エネルギー・新エネル
ギー技術の効果の検証調査専門委員会委員,電気
学会鉄道の運転に関する概念と用語の国際比較と標準化調査専門委員
会幹事補佐,電学交通・電気鉄道技術委員会特命幹事。
佐 藤 安 弘 (非会員) 1963 年生。1986 年東京理科大学理工
学部土木工学科卒業。1986年運輸省交通安全公害
研究所(当時)入所。交通安全環境研究所交通シ
ステム研究領域副研究領域長,同研究所鉄道認証
室長を経て現在同研究所交通システム研究部長。
鉄道の走行安定性に関する研究に従事。土木学会
会員。
932 IEEJ Trans. IA, Vol.137, No.12, 2017
省エネルギー運転制御手法の実証試験(渡邉翔一郎,他)
古 関 隆 章 (正員) 1963 年 7 月 29 日生。1992 年東京大学
大学院工学系研究科電気工学専攻博士課程修了。
同大学工学部講師,助教授,同大学工学系研究科
電子情報学専攻准教授,同大学工学系研究科電気
系工学専攻准教授を経て現在同専攻教授。工学博
士。電気機器制御の交通・輸送分野への応用の研
究に従事。日本 AEM学会,日本機械学会,精密
工学会,日本鉄道電気技術協会,IEEE 会員。
水 間 毅 (正員) 1955 年生。1984 年東京大学大学院工学
系研究科電気工学専攻博士課程修了(工学博士)。
1984 年運輸省交通安全公害研究所(当時)入所,
2011年交通安全環境研究所理事を経て,2017年か
ら東京大学新領域創成科学研究科先端エネルギー
工学専攻特任教授。新しい交通システムの安全性
評価試験法の研究,鉄道からの磁界解析に従事。
田 中 龍 治 (非会員) 1991年日立製作所入社。現在,鉄道車
両用信号保安装置の設計,システム取りまとめ業
務に従事。
宮 路 佳 浩 (正員) 1989 年日立製作所入社。現在,鉄道車
両用制御装置の設計,システム取りまとめ業務に
従事。
磯 部 栄 介 (終身会員) 1948年 1月 2日生。1971年慶應義
塾大学工学部電気工学科修了。(株)日立製作所
鉄道ビジネスユニット勤務,(一社)日本地下鉄
協会リニアメトロ推進本部部長兼務,電気機器制
御の鉄道分野への応用の開発(計画・設計)・実
用化(製造・試験・評価)・監理業務に従事。日本
技術士会会員(総合技術監理部門,機械部門,電
気電子部門)。
933 IEEJ Trans. IA, Vol.137, No.12, 2017





























