Embed Size (px)
Citation preview

Vol. 24 No. 127 電波研究所季報 March 1978
pp. 109-120
研究
衛星の電力収支シミュレーション
丸山 隆* 松浦延夫*
(昭和52年9月27日受理)
COMRUTER SIMULATION ON ELECTRIC POWER BALANCE
OF THE SATELLITE
By
Takashi MARUYAMA and Nobuo MATUURA
On February 29, 1976, the Ionosphere Sounding Satellite (ISS, UME, 1976ー019A)was launched
by the National Space Development Agency of Japan (NASDA) from the Tanegashima Space
Center. About a month after the launching, however, an accident happened on the power subsys-
tern and as the results the function of the spacecraft had been aborted. The backup flight model,
ISS-b, is now scheduled to be launched on February, 1978.
The main objectives of the ISS project are to observe the worldwide distributions of the iono-
sphere and radio atmospheric noise. In order to carry out them efficiently, the ISS operation sche-
dule is made automatically following the pre-programed procedure with the aid of the main com・
puter system, TOSBAC 5600/160, installed at the Radio Research Laboratories, Head Quarter. It
is one of the most important points in scheduling to avoid the over spending of the battery energy,
and so it is necessary to simulate the status of the power budget, mainly the state of charge of
the battery, throughout the period of the schedule. Whenever the over spending may be predicted,
the schedule will have to be corrected.
In this paper, the outline of the simulation method is described, and the results from the
simulation are compared with those obtained from analysis of the telemetered house-keeping data
concerning with the power subsystem of the ISS, which were obtained before the .accident.
1. まえカt き
電離層観測衛星(IonosphereSounding Satellite,
IS S,うめ)は, 1976年2月29日,宇宙開発事業団
によって種ケ島宇宙センターから打上げられたが,約1
か月後iζ電源系統の故障のため衛星の機能を停止し,電
波研究所による定常連凋までに至らなかった。なお,
*情報処理部衛星データ解析研究室
109
1978年2月に予備機 (ISS-b)の打上げが計画さ
れている。 Is Sの定常運用時においては,その観測計
画を電波研究所本所の大型計算機システム(TOSBAC
5600/160) Iとより自動作成する。その際,作成された観
測計画に従って衛星の電力収支について計算機シミュレ
ーションを行い,乙れによって電力の過度消費を未然に
防止する。もし過度消費が予想される場合には,各方面
と協議して計画案を修正しなければならない。

110
Z軸
スピン刺l
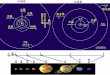
第1図 IS Sの外観と姿勢の定義
本文では,衛星の地上lとおける諸実験の結果を基にし
た軌道上での電力収支の簡単な計算法について述べ,更
にIs S運用中の1か月聞に取得した電源系統lζ関する
ハウスキーピングデータの解析結果についても触れる。
2. 衛星の日照条件
I S Sは一次電源として太陽電池を使用し,日照時iと
は通常,その発生電力が各サブシステムの合計消費電力
を上回る。乙の余剰電力の一部は蓄電池に蓄えられ,日
陰時の電源として使用される。太陽電池は衛星本体(円
筒形)の側面に取付けられており,発生電力は姿勢lζ大
きく影響される。乙の場合の姿勢とは,第1図lζ示され
電波研究所季報
(%】
0 日) 100 1日I 211J WI :ll川:l!>I 4山,l!>J 51XI 5日1(11)打 i:げ
第2図 日陰率及び姿勢の変化予測(文献(9)参照)
るように,円筒の中心軸(衛星幾何学軸)と太陽光入射
ベクトルの成す角 (rspss)である。姿勢は,衛星の残留
磁気モーメントと地球磁場との相互作用,あるいは重力
勾配によるトルクによって大きく変化する。また,電力
の発生は日照時IC限られ,衛星軌道函と太陽方向との角
度によって日陰率が変化するため平均発生電力が変動す
る。 Is Sの軌道は高度lOOOkm,軌道傾斜角 70° の円
軌道で,地球の偏平による摂動によって軌道面は1日に
約zo回転し,地球の公転と合せて太陽方向IC対し 1日
lζ約30回転する。第2図は,日陰率及び姿勢の変化予
エクスベリメントコンノfータ
斗ft術系
第3図 IS S「うめJ電源系統概念図

Vol. 24 No. 127 March 1978
測である冊。乙れによれば,打上げ後430日前後には,
最高時 (rspss=90。)の約40%の発生電力となる。し
たがって,効率的な運用を行うためには電力収支を考慮
した上で観測計画を作成する必要がある。
3. 電源系の基礎概念
第3図に Is Sの電源系統のプロック図を示す。図か
らも明らかな様IC,大きく三部分,すなわち太陽電池
系,蓄電池系,及び負荷系lζ分けて考える乙とができ
る。以下では各部分について簡単に述べ,それぞれの電
気的特性を簡単な関数で近似する。
3. I 太陽電池系
太陽電池系は,太陽電池パネル及び.パス電圧上限値ibll
御回路(OVC:Over Voltage Cゐntroller)から構成さ
れる。太陽電池パネルは,受光面積 4cm2の太陽電池素
子を直列約72段,並列1又は2列のストリングとして
合計36ストリング,約5000枚用いている。また,パス
ラインへの接続は逆流防止ダイオードを通して行われ,
日陰時には乙のダイオードによってパネルはパスライン
から切離される。 ov c回路はOv C検出部,及び分流
回路から成り,分流回路はパネルの中間タップにスイッ
チを通して接続されている。乙乙で,便宜上中間タップ
よりパス電位(Vbus)側を上部太陽電池, アース電位
側を下部太陽電池と呼ぶ。パス電圧が一定基準値を超え
た場合, Ov C検出部は乙れを検出して分流回路を作動
し,下部太陽電池の出力を分流する乙とでパス電圧を下
げる。乙れにより,太陽電池の発生電力が抑えられる。
単体での太陽電池パネル出力特性と,乙れを双曲線で
近似した一例を第4図に示す。上部及び下部太陽電池パ
ネルに分離した場合,分割比lζ応じて横軸(電圧値)が
異なる他は類似の特性である。乙の場合の双曲線を表す
のに必要なパラメータは, lsII, VoP, A, Bの四つで
あり,基準条件下(0。c'rspss=90°)での値をlsII。,
VoP。, A0,B。とし,温度係数 a1, av,入射臨界角
2.0I-I_.
¥tt
‘" 1.s -アシ
手1.0】
0.5
0 0 10 "" L
t
r
uu
第4図太陽電池パネル出力特性黒丸は実測でNASD
A資料による(4分割した内のltlc)
111
1.u•-
1械J
,,
0 5
。。 :<o 自』 5削,~,
」、同ノ‘ピd 向(ff!:)
第5図実効入射光量の角度依存黒丸は計算機シミュレ
ーションでNASDA資料による
r••i. r .. 2.入射角度係数 ni.n2を用いて次式で与え
る。
ゐH=(l+α1T)f3lsH。VoP=(l+αvT)VoP。A=f3A0
B=f3B。
/白内-r•v ¥ J /3=1-(ー~1'¥ 90-rssJ I
…(1-a)
…(1-b)
…(1-c)
…(1-d)
…・・(1-e)
j= f 1 : rspss:s;;9Q。l 2 : rspss>90°
乙乙で, Tは太陽電池パネル表面温度である。また, /3 は実効的な入射光量変化を表し,アンテナの影,カバー
ガラスの影響を含む。 Pのグラフを第5図iζ示す。上で
述べた四つのパラメータを用いると, V-I特性は次式
より求まる。
(I一ゐH)(l-A(V-Vop)} =B ・・・・・・(2)
O~.I<IsH, o~玉 V<VoP
上部及ひ.下部太鴎電池の場合について(2)式をIについて
解いた結果を(3)式とする。
l1=F1(Vi) 上部太陽電池…・・・(3一 叫
ん=F2(Vi) 下部太陽電池・・・・・・(3-b)
ov c回路を含めた太陽電池系の出力特性は,中間タッ
プの電圧を Vsとして(4),(5)式を解いて求まる。
i) ov C回路が未作動のとき
l1=F1(V-Vs) ……(4-a)
I戸F2(Vs) ・・・・・・(4-b)
l=l1=l2
ii) ov C回路が作動しているとき
l1=F1(V-Vs)
l2=F2(Vs)
…(4-c)
…・・(5-a)
.・・・・(5-b)
l=l1=l2-Vs/RsH ……(5-c)
乙乙で, RsHは分流抵抗の値である。
3.2 蓄電池系
蓄電池系は,公称容量5AHのニッケル・カドミウム
翠電池,充放電回路,蓄電池論理回路,及びリコンディ

112
30
司I
(ボルト}
20』
電 波研究所季報
OPP初期化 | (初めて運用するとき)
観測計画スケジュール
。初 40 60 剖 加 120 |縦貫データ作表・作図
STATE OF CHAR四例}
I~釦l.~ '.)~fr計岡一次案作成第6図蓄電池充放電特性(文献(1)参照)
2.5
2.0
議L(
7 ンペ 1.07 )
0.5
。。 20 40 60 80 100 120 STATE OF CHARGE(%)
第7図蓄電池効率(文献(1)参照)
ショニング回路から成る。蓄電池論理回路は蓄電池の充
電状態を監視し,日照時で充電完了の場合,第3図のス
イッチ S2を開き弱充電状態とする。通常は太陽電池の
発生電力が各サブシステムの合計消費電力を上回り,そ
の差が充電される。充電が進行するに従って,蓄電池端
子電圧が臨界値を超えた場合,又は一定の温度条件を充
した場合,充電完了と見なし S2を開く。乙れによっ
て,充電はトリクル抵抗を通した弱(トリクル)充電モ
ードとなり,過充電が防止される。日!被時iζ弱充電モー
ドで負荷電力が一時的に急増した場合,あるいは日陰時
IC S2が聞いていた場合,放電はダイオードを通して行
われトリクル抵抗による電圧降下は生じない。リコンデ
ィショニング回路は,蓄電池を完全に放電させ再び充電
する乙とによって劣化した性能の回復を計る機能で通常
は用いられない。乙のほかに, ISS-bでは不測の事
態に備えてコマンドによる蓄電池の切離しが可能にな
る。
蓄電池の充放電特性は,第6図iζ示す様ICS字状であ
るが,通常は平坦部分が動作点になるので(6)式で乙れを
近似する。
V=九十(者).Q 充電時 ・(6-a)
コメント NG
計画監視
-M
コメント
,l(・耐読み If'.し
第8図観測計聞作成プログラム概要(文献闘参照)
tdV¥ V=Voa+(dQ}<tQ 放電時・・・・・・(6-b)
乙乙で, Voe, Voaは充電開始電圧及び放電終期電圧,
(dV/dQ)c, rtは平坦部の傾きである。(6)式では特性を
記述するパラメータを充電及び放電の二つの場合IC分け
たが,厳密には充放電電流の値に応じて連続的に変化す
る。蓄電池の特性を記述する重要な要素として,ほかに
充電効率守がある。一般に申は電荷 Q の増加と共に
低下し,充電率1009彰付近で急激に OIC近づく。また,
充電電流にも大きく左右され,弱充電程効率は低下す
る。守の変化の一例を第7図に示す。 守の近似とし
て,乙乙では守がOとなる臨界容量 Q制"" 同充電電
流 Im帥及び甲の代表的な値引を与えて,臨界値以
内では守=Tjo,とれを趨えた場合は守=Oとする。

113
電力状態変化に関係するコマンド機能第l表
1978 March No. 127 Vol. 24
’AO
’uqoan噌
Fano
”’onunwd
噌
A
句
。
anτRUFOn
’nanwdAυnL
句
doontntaonuunU
噌
A
’i
’i
・4
・A’A
唱
A
’A噌
i
伺’un404qυ
,n官民
UFOPDFUFO
テレメトリ送信機 136MHz ON
400MHz ON
出力上昇
出力制御
136MHz OFF
400MHz OFF
テレメトリエンコーダ- #1 ON
事2 ON
衛星動作チェックモード ON
実時間制調U ON
記録開始
再生開始
テープレコーダー停止
再生開始・自動記録
テレメトリー動作停止
遅延記録 1
2
3
TOP 電源 ON
PI C電源 ON
RAN電源 ON
RP T電源 ON
観測機器電源 OFF
フル充電
トリクル充電
リコンディション
コマンド番号能機内部番号
ON
OFF
Tin,uq
o
a
,raFO
可
4nonwdnυ
’in
,uqdaaτraFO
巧
dnonudAυ
・in,uqoaaτrapont
tz
・‘,Eム’Ez.‘aA
唱
Ea.,EE.,E‘,EA
’E‘,E・・0FU
内ソムMn,“。,“。,“
nl“nJunr“
P. v l=G( V) =_____!!.___+一一+んV Ro
九, Ro,んの値は,各サブシステムの作動状況を幾つ
かのグループ(運用状態インデクスで表す)に分類し,
それぞれの場合毎lζ与える。乙の分類を第3表IC示す。
・・・・(7)
4. 1 電力状態に影響を及ぼす状態変化の抽出
運用計画作成プログラム山の概略を第8図に示す。
図中でシミュレーションとは,複数個(例えばIs Sと
ISIS-1, 2)の衛星の運用上での競合関係,ある
いはコマンドの論理性等の地球局側のシミュレーショ
ン,及びIs Sの逐次電力解析である。
計画一次案作成の前にあらかじめ必要な期間の軌道及
び姿勢の予測計算を行う。これらの結果及び作成された
観測計画案(計画一次案)は,磁気ディスク上にファイ
ルとして保存されている。軌道データファイルから日照
状態の変化,及び周囲番号の更新をその時刻と共に抽出
する。また,観測計画ファイ Jレからは電力状態lζ影響を
及ぼすコマンド(第1表〕を抽出する。更に,衛星は内
部iζ各種のタイマーを搭載し,電力状態変化はコマンド
送信時IC限らず,その一定時間後に現れる場合もある。
乙のタイマ一機能を第2表lこ示す。次iζ,抽出したコマ
ンドからタイマ一機能を考慮して運用状態変化を求め,
第3表の分類lζ従ってその時刻における運用状態インデ
クス (ILOD)を決定する。最後に,以上のすべての
変化を時刻順に並べ換え,次の逐次電力解析の入力デー
タとする。
4.2 逐次電力解析
観測計画開始時刻における初期電力状態を与え,逐次
計算によって計画全期間(一週間又は一か月間)にわた
JI慎手算・計4.
電力状態変化に関係するタイ 7 一機能第2表
時間(分)
’An
4
q
o
a笹
FOFOnt
蓄電池の特性を記述するパラメータは温度依存性が強
く,運用条件によって発熱,又は吸熱量が変化するた
め,温度の予測をせずに充放電特性及び効率を近似する
パラメータの数を増すことは無意味と恩われるので最小
限にとどめた。
3.3 負荷系
パスラインは電圧変動が大きいので,各サブシステム
への電力供給はサブシステムコンパータ(SSC)及び
エクスペリメントコンパータ(EXC)を通して行われ
る。 Ex Cは主として観測機器用で,パス電圧が臨界値
以下になった場合,下限電圧制御回路(UVC:Under
Voltage Controller)によって切離され電力の消費を抑
制する。 Ss Cはテレメトリ送信機等の非観測機器用
で,常iζ作動している。
負荷特性は,コンパータの変換効率を含めて(7)式で与
える。
句’n,unυnUAUFOFO
唱g
----A
’EAnyu内《
U
旬
A
内,“,aτ
”。
能
テレメトリー送信制御
記録停止
二周遅延記録(遅延 1)
四周遅延記録(遅延2)
六周遼延記録(遅延3)
再生停止
自動記録
機内部番号
る電力状態を求める。逐次計算のステップ(dt)は通常
10分程度とするが, 4.1で求めた状態変化の生じた場合
には,状態変化の数に応じてステップを細分する。初期
値として与える電力状態は,次の各項である。
i) 蓄電池容鼠(SOC:State of Charge), Qo
ii) 蓄電池端子電圧, Vt0
iii) パス電圧, Vbus0

114
第3表迩用状態インデクス
テレメトリー送信機
巡Ill状態OFF 136 MHz 400 MHz 136 MHz ON
ON ON 400 MHz ON
ビーコン状態 2 3 4
災時l:¥Jテレメトリー 6 8
実災時1時間チェック ・ 12 13 14 IUJテレメトリー
日己主主チェッタ 15 15 15
記録II寺チェック ・ 16 17 18 実 II日テ レメトリー
再生テレメトリ ー 19 20 21
実笑時11¥JltllJliJ. 22 23 24 II寺!日lテレメトリー
記録制n!IJ 25 25 25
記:;l!;録H寺制川1テij[リレ・メト')ー 26 27 28
iv) 衛星内部機構で決定される内部状態指標(OV
C, UV C作動の有・1m,充電モー ド〉
v) コ7 ント‘及び軌道によって決定される外部状態
指標(日照状態, 迎用状態,リコンディション回
路の on/o任,各餓iJliH幾総電源の on/off)
ただし,iv)項で充電モー ドはコマン ドによる切換えも
可能であり, コマン ドと内部状態と矛盾する場合はコマ
ンドを佼先する。
』~Iζ述べたように, 太陽電池 ノぞネ ノレの 11\力n_;:流を F
(V),負荷電流を G(V)とすれは\ その差 S(V) G
(V)は蓄電池の充(放) 't~~@:流である。 蓄屯他端子電
圧 (V」。),及び状態指標から求まる充放1]J:経路を与える
と,蓄電池回路の I-V特性,l=B(V)が求まる。ζ
電波研究所季報
l、防 a世E也!l',)J朴刊
/
('1 d江Hit
ト-r
制4
;;fl 9図 'dJ:il!i(;系の勤flJ¥
れICよって,パス泣圧は次式で決定される。 (第9区l参
J!i日)
B(Vb山)=F(Vius〕-G(Vi.u.,) (8)
次IC, Vbusをmいて各部の屯流,';;i;(圧を求め, 蓄電
池容量(Q),内部状態指標を更新し, 次のステップの
初期値とする。Q は(9)式から求まる。
Q=Q。+Lit甲β(Vbus) ・・・(9)
内t¥11状態指標については,ヒ ステ リシスを持つ,すなわ
ち臨界氾圧は上昇||寺と下降時とで異なるので,前ステッ
プの結よIi:と比較し屯圧変化方向を考慮して決定する。外
部状態指僚は,状態変化のある ときだけ 4.1の結泉を用
いて更新する。
また,太陽\ffii也特性を求めるのに姿勢データを用いる
が,姿勢変化は緩やかであるから,周囲番号更新H寺のみ
軌道データファイノレから引用し更新する。
ON
OFF REV. N0.62 4. 01
3.0
町在
流 2.0
『J
ンぺ 1.01 日陰ア)
。
-1.0 ムーへー2.0 一1550 1600 1610 1620 1630
Hキ主1j(UT)
第 10図 チェックモード ・データの一例

115 1978 March No. 127 Vol. 24
充電モードの変化
/~j回答号
67
69
75
HK シミュレ評価データ
。。。
。。
x
。
。。。。
。
x
0
oxo
。0
x
残りの4枚(M1A~M.A)は開放電圧測定用であり,
入射光量による電圧の変動はわずかである。乙乙では,
M1Bの短絡電流について解析した。第1図からわかる
ように, T•P••>90° では M1B Iζアンテナ等の突出物の
影は生じない。
6.1 HKデータの処理
モニタ・セルの出力電流は,太陽,地球,衛星の相対
位置と素子の法線方向によって変化する。チェックモー
ド時のデータ・サンプリング間隔= 1 sec,スピン周期
=4.4secを考慮して, 64秒間(フレーム識別番号 1~
64,又は65~128)のデータを用いて出力電流変化のパ
ターンを求める。なお,軌道周期は約105分であるか
ら,乙の聞の衛星の移動は約470kmである。姿勢センサ
により求まるスピン周期の概略値 Tsp’を用いて64秒
間のデータを1スピン周期内に還元する。乙のとき正し
いスピン周期TspとTsp’が等しければ,還元して得た
グラフはスピンによる出力電流の変化を完全に表してお
。
。。。
ド↓↓0
1
0
↓1
↓0
0
↓1
0
↓↓o寸
0
↓o叶
1
1
1
1
n
v
n
u
n
U
A
U
A
H
V
A
U
A
υ
a
U
A
U
n
U
日
日
目
。
日
0
日
1
日
目
。
日
日
1
日
日
1
日
日
目
。
日
日
日
日
1
。
×
時間(時分秒)
051330-052700
021047-021413
035748 040148
191711ー 192909
024505-024912
043250-043603
013107-014443
050654 051040
020412-020823
035151-035315
031209-031434
011250ー011632
030106-030406
235859-000209
014638-014826
003301-003558
022104-022512
010830-011141
235248-235544
014102-014418
234616-234843
002045-002337
005525-011028
001533-001857
230143-230438
225535-230355
。κ“an宮
F司uvan官
n民vnud
’ZA
内《UF
内UFhvn唱uan--F町u
n
,・
aMU
’Eゐの,UFhuonUAUJMnuun‘un
,・
an--n,・
0nv
aaτrDFDPRuponO
白
MU
自白
n3Qd
。,UA
U
n
u
’i
’A
句。”0
・4raFDnuu
’iO
4
F
D
F
O
A
U
’Bム
n7huny“
nF白向次“
ndMnκ“
ny“
n,un
’unγLun‘un
唱
υ
内‘un
唱
uaa--.
第4表
通算日
66
63
64
65
テレメトリ・データとの比較
5. I 太陽電池出カの変動
第 10図はチェックモード・データの一例で,太陽電
池出力電流,蓄電池充放電電流,及び充電モードであ
る。強充電時 (15h55田~16h28mUT)には二つの電流
値の差は短周期の変動を除きほぼ一定しており,衛星の
負荷電流を表している。乙の短周期の変動は,スピンに
よるアンテナの影の変化によると考えられる。我々の計
算法では数分間隔の逐次計算であるから,乙の種の変動
はすべて無視している。
1615UT付近にピークを持つ緩やかな変動は,乙の前
後で衛星の運用状態が一定である乙とから,外部要因に
よると考えられる。乙れらの点、については後輩で詳述す
る。
5.
76
77
78
nWu
--ゐ内‘uan--F拘u
n
’nnun6
自白血δ
89
* 0:強充電1:弱充電
5.2 充電モードの変化
逐次計算間隔を2分IC設定し,約1か月間(1976年3
月3日~29日)のシミュレーションを行った。地上試
験で不確定であったパラメータ及び初期値についてはH
Kデータを参考にして決定した。電源系各部の特性につ
いて単純な仮定をおいているため,また所期の目的が1
週間乃至1か月間の電力過不足の予測であるから,充電
モードの変化lζ着目してみる。第4表は実時間チェック
モード時の充電モードを, HKデータとシミュレーショ
ンとで比較したものである。ただし,日陰時のデータは
除外してある。表中で“0-1”は強充電から弱充電へ,
“1-0”はその逆の変化を表す。 “0ヘ “1”は,
それぞれ強充電,弱充電のまま変化していない場合を表
している。約8割のパスについては,モード変化時刻の
差が5分以内,又は同一モード(変化のない場合)であ
る。結果については,運用計画作成への反映方法に今後
の課題が残るが,観測回数の妥当性に関して目安が得ら
れる。
アルベド入力による太陽電池出力の上昇
既に前章で述べたように,太陽電池出力IC::比較的長周
期の変動が見られた。乙の変動の原因を知るために,衛
星内部状態,特に負荷の変動及び蓄電池電荷によって大
きく変化する太陽電池パネル出力よりは,むしろモニタ
ー用太陽電池索子(モニタ・セル)出力を利用する方が
好都合であるので,そのデータを解析した。モニタ・セ
ルは,衛星本体の側面に取付けられた放射線による劣化
監視用の素子(2cm×2cm)で,全部で8枚あり,乙の
内4枚(M1B~M.B)は低抵抗を接続し短絡電流を測
定している。短絡電流は入射光量に比例し,乙れによっ
てパネル全体への入射光量の変動を知る乙とができる。
6.

電波研究所季報116
地理純度(deg)
70 60 40 20 。
・-
-
-, .・・ 〆’L.・,
o • I’ .,,唱u _,.,.,,,.. I _,,・・一/ I •-・・I I "•
ノ,・/ノ
・//・J 〆・ノ ,, .ちノノ一一ー
• HKデータ
一一計算(不均一モデル)
ーーー ク(均一モデル)
60
1.3
相1N 1.2
力
)~ 1.1
~.39
スピン同州(秒)
l
沼
・4AJ
ι
i
ーし千lーや叶
. . . . . . . . .
. . . . .
. .
. . . . . . .
. . .
.
. . -
ll叫lili--回
-
a
1
1
スピン半(RPM)
l~.40
-¥4.43
13. 6;;1-・
!. 0
一ι,,
1640
REV.62
1610 1620 1630 H事刻(UT)
モニタ・セル平均出力電流
1600
第 14図
1630
スピン率(スピンj剖倒)の時間変化REV.62
1610 1620 II寺刻(UT)
lWO 。
第 11図
1632UT
目ヘ・.’・. .
16おUT
(¥
1619UT
・' . ・. . - . . .. .・. ..
1612UT
ー・・・・.. 、.
.. t
:: ー・・
1606UT
戸ト
1600UT
’\
ド 1
150
電iTii. (
・J 100
7 /
J、Z7
--・・ ・ 6 ‘,. ..‘ ・5 、l・6・.-
/'•、、4匂,. I・
.‘許 可也
-|』
kH
F
トー50
、・-一一、『
-
-ー・・・・O/j 2π 1r 。
" 。1r
モニタ・セJレ出力電流変化
" 0
スピン位相
。
第12図
π 。"
地理w主(deg)
-211 -40 吋 II 71)→(} 40 ?
tiO 70
• H Kデータ
一一計算(不均一モデル)
ーーー φ (均一モデル)
60 。20 ,JO
I. 3
.. ・. ・F・II
.•;ノ・/,o I I . ,, ・f’
-・・ /,’ .--〆
.・ d'~
十IIN 1.2・一
帯lI
」
Ill1L
HU
L一一一一」1mo 0340
II.~ 刻( UT)
--'一一11320 l
υ:Ho l
{日{}{} ()140 0430
REV.27~28
{ル120
モニタ・セノレ平均出力活流第 13凶

Vol. 24 No. 127 March 1978 117
地理締皮(deg}
40 60 70 60 40 20 0 -20 -40 -ti() -70 -60 40 -20
I. 3
:~1 I.
iL. I
I. o.ト蝿--・H 輔副
• H Kデータ一一計算(不均一モデル)
ー-- ,, (均一モデル)
..
1150 l201l 1210 1220 1230 1240 1250 1300 1310 1320
n,j< ;I{!] (UT)
第 15図 モニタ・セノレ平均出力電流 REV.443
り,このグラフは滑らかなはずである。一般的には
Tspと Tsp’とは異なるので,乙のグラフに平滑化処
理を施し,処理前のグラフと比較する。二つのグラフの
差から最小自乗法を用いて正確なスピン周期が求まる。
第 11図は,乙うして求めたTspの時間変化の一例で
あるが,日照開始直後は出力の変化速度が大きいため解
が求まらない。また,時間の経過と共iζスピン率が低下
しており,日照による温度上昇のためアンテナ等の熱膨
張が慣性能率を大きくしていることがわかる。第12図
は Tspを用いて還元した出力電流の変化を示す。左端
のグラフは日照開始直後のもので,素子が太陽方向を向
いた半周期にのみ出力が見られる。衛星の移動と共lζ反
太陽方向に出力が現れ,ピークの位置も移動する。右端
のグラフでは,衛星位置は赤道上空である。 1スピン周
期にわたって出力を積分した結果を第 13~15図IC示す。
乙れが太陽電池パネル出力に対応する。乙乙で,衛星が
日照状態IC変化した直後の値を1としてある。
6.2 アルベド入力の計算
地球は,その表面あるいは大気によって太陽光の一部
を地球外lζ反射,散乱している。この反射光来は入射光
束より小さく,その比を(地球の)アルベドと呼んでい
る。最近の研究凶細川では,地球の平均アルベドは約
0.30とされているが,エネルギーに関して定常状態を保
っとすれば吸収した太陽エネルギーと等エネノレギーの熱
穏射を行う。これを黒体編射と仮定すれば,地球の赤外
有効温度は約250Kとなる。
と乙ろで, Is Sは高度lOOOkmの円軌道であるか
ら,乙れらの穏射の影響を強く受けるはずである。第16
図に熱穏射,太陽光(6000Kの黒体縞射)及び太陽電池
の分光特性を示す。図からわかるように,太陽電池出力
iζ対する熱縞射の影響は無視できる。アノレベド入力のス
I. 0•-
RU
ハU
制対強度
O.ll 0.1 .o 10.0
;店長(μ)
第16図分光特性文献(6)参照
太陽z
x y
第 17図
ベクトルは太陽光のそれと同様であるとして,次の仮定
の下ICモニタ・セル出力を評価する。
i)出力はセルへの入射光束IC比例する。
ii)地球表面あるいは大気による反射,散乱は天頂半
球l乙対して等方的とする。

118 電波研究 所 季報
m 1s1'l!1アノレベ
アノレベドの他lζii;;:も大きく寄与するWP'Iは雲の分市とJ湿
地方の雪及び)]<.で:あるが,~:の分111· は一定していないの
で,乙乙では平均的なアノレベド分布をJIJL、る。実際KffJ
いた分布は,約 2.i!週間Kわたって NIMBUSJI, :III衛
星ICよってf(QIJt1Jされた結果{川叶l引を問時化したもので
ある。
地球tj:i心を原点としてi括星位置がZ<1411」二となる雌標
系,第 17ばlを川いて,各記号創立|の様IC定義する。地
球半径を rB, 衛星地心距離を η とすれば,地表面要
素 σと衛星の距離 Jは(10)式となる。
l=[r.,2十l'Is2-2rsnscos 0]112 ・ U日
σへの太陽光入射frJを 1σ,セノレへのアノレベド光入射jI1,
太陽光入射角をそれぞれん,んとする。セノレにlfe.1i!:f.入
射する太陽光点を lとすれば,全人射光よねI1i(l1)式より
求まる。
l=すJ:to山川
A(!I,の)汽ん)仰σ)手
sin OdOd伊+f(A,)
ただし,関数/(え)は次のように定義される。
/CJ.)= cos J. I J. I寸
)
- l
f(J.)=0 IJ.I>言
また, 11,ψ は σのj也理経度,純度で,A(tl,ゆ〕は σ
でのアノレベドである。アノレベドの値は第 18図 IC示すア
Jレベド世界分布図を参照して決定する。
1スピン周期にわたって積分した入射光東の訂釘結果
を第 13~15図iζ示す。実線はtlHS図のアノレベドをJIJい
口 o.z 囲 0.4
ド分 (jj 図
たJt\合,破線はアJレベ ト‘を均一(0.30)とした湯合であ
る。乙 ζで,アノレベドを考慮しない 場合 (A三0)の額
分入射光東を 11ζ刷絡{じしである。これらの結果から,
第9闘に見られる太陽市池山力の緩やかな変動はアJレベ
トー入力によるti',力上昇と考えられる。また,乙れらのグ
ラフlζ見られる一般的傾向として,比較的高純度で計卸
値とHKデータのずれが大きいのは,アJレベ ド分布を簡
略化したためと思われる。文献<1 •1 - < 1 01 Iζよれば極地方
のアJレベドは 0.5~o.7である。乙のほかのずれは,す
でに触れたようにアルベ トに最も大きく寄与する主の分
布を平均化した点,あるいは散乱を!j/J:方的と した点にあ
ると忠、われる。しかし,詳しい解析は問題を複雑化する
7こめijわなかっfこ。
6. 3 アンテナ影による出力変動
モニタ ・セノレ山ブJデータから求めた Tsp汝びスピン
bf.fl]をJ日いて,太陽屯池パネ Jレ出力屯流のスピン位相IC
よる変化を求めた結果を第 19図K示す。太陽方向との
相対的なスピン位相ゅは,モニタ ・セル(M1B)出力
の&大値をゆ=π12としてある。RE V. 8, R E V. 22
"&ひ REV. 62 (15"59'"08'~16"0om1isu T)のクラフ
は七|!!日開始直後の状態で,すべて負荷状態は同等(蓄',; Ll
J也は強充筒状態,運用モー ドはチェ y ク記録)である。
第1図に示すように,I S Sは本体からの突出物として
1刈のブームと直交ダイポール(ステム)アンテナを持
ち,ブームの展開,ステムアンテナの展事11はそれぞれ
R E V. 14, R E V. 27 IC尖行されたから,これら 3つの
グラフの差はアンテナの影の影轡を示している。特』ER
EV.22とRE V. 62 (155908~160001 UT)の差から,

119
密接に関連している熱の問題は無視せざるを得なかっ
た。特性パラメータについては不明なものが多く,また
温度との関係が深いため,一部のHKデータを参考にし
て適当IC決める結果になってしまった。今後, ISS-
bでは定常運用を通じてパラメータを決定すると共に,
「うめ」の解析結果等を考慮して計算方法の改良を行う
必要がある。
1978
dlw也
、一品-h
o口
同
。
も
も1
4
3
b
o
a
g
M
x
h
ロox-R
。。。
B
O
A
x
k
f
JVJ山kwpLr
ロロ・{酬。∞
3
0
ロロ---
M唱
山一九ぬ
3
ロ田口保持、
1c
aロ
’
k
k
m
v
田
叫
『
。ロ
ヨ
若
6
0
0
3
田
山
川
’
IF刊
日
2
a
E
H一凪。も
ロロ
σ
Uベ
ι川@
O
AU
ワ匂
March No. 127 Vol. 24
3 0
2 5
辞
木研究の主対象である Is Sの電源系に関する資料,
並びに Is S「うめ」の取得データiζ関する資料を提供
して下さった宇宙開発事業団関係各位に深謝致します。
また,本研究の促進lζ御援助を頂いた電波研究所ISS
研究運用木部各位lζ感謝致します。
謝
11';'切( i'T¥
• nl‘γ同 1;15,,1~1丁目,;
l< HI孔.221;1gc,9~1;5"巴
。HI孔.fi2!S5"08~lti<>ll!
ロ RE¥'.fi2161820~1r,1児1
太
問•;[
苦J.5力7昔話
アン,てァ 10
(1) P. Bauer ; Batteries for Space Power Systems,
NASA SP-172.
(2) P. Bauer ; Computer Simulation of Satellite
Electric Power Systems, IEEE, AES-5, pp. 934
-942, 1969.
(3) J. Bacher and D. Rusta ; The Analysis of Vol-
tage-Limited Battery Charging Systems, IEEE,
AES-4, pp, 792-798, 1968.
(4)大村勝敏,回口三省,岩本邦雄;太陽電池と周辺技
f;jij,電子材料, No.10, pp. 69一75,1974.
(5) 笹木辰雄,他;人工衛星用太陽電池パネル,三菱電
機技報, 48,No. 8, pp. 1026-1033, 1974.
(6)木村謙次郎,鈴木舷夫,桜井宏治;人工衛星用シリ
コン太陽電池, シャープ技報, 16, pp. 55-64,
1971.
(7)後川昭雄,高橋慶治;科学衛星の太陽電池出力,東
京大学宇宙航空研究所報告, 5,pp. 61一79,1969.
(8)高橋慶治,後川昭雄;科学衛星用太陽電池パネルの
軌道上における出力の評価,電子通信学会技術研究報
子子, SANE 75 15.
(9) 「うめ」予備機の改善;宇宙開発委員会技術部会第
一分科会配布資料,宇宙開発事業団,昭和51年11月
29日.
献文考参
’" スピンr:,111 ,.
スピンによる太陽電池パネル出力の変動
:i,r, 1百"
05
0 u
乙の出力低下は
第19図
ステムアンテナの影響が著しい。また,
4回の対称性を示している。
R EV. 62 (161820~161923UT)のグラフは,すで
に述べたアJレベドの影響を受けている。 REV.62の2
つのグラフの差はいに無関係で一定している乙とから,
アルベド入力に対するアンテナの影の影響は少ない。こ
れは,直射太陽光の場合点光源、のため影が鮮明であるの
に対して,アルベド光では面光源で影が不鮮明となるた
めと考えられる。すなわち,太陽電池パネルは 4cm2の
定電流素子(電流は入射光量IL比例する)を基lとしてい
るため,直列接続lζ対しては最小出力の系-子が全体の出
力電流を決定する問。したがって,影は分散した方が集
中した場合より影響が小さくなる。乙の乙とは,ステム
アンテナ展伸後lζアルベド入力による太陽電池バネJレ111
力上昇が,単一セル(モニタ・セJレ)の場合IL評価した
値より大きくなることを意味している。実際lζ,第 10
図で 1615UT付近のピークは日照開始時の 1.5倍以上
になっているが,第14図で対応するピークは1.3倍以
下である。 仰) ISS P M各サブシステムの取扱説明書。
(11) 電離層観測衛星 (ISS)追跡管制実施計画書,字
宙開発事業団追跡管制部,昭和51年1月。
(12) 人工衛星追跡管制報告 No.14,宇宙開発事業団追
跡管制部,昭和51年 10月。
(13) 電離j菌観測衛星プロジェクト実施計画書,電離層観
測衛/J1研究運用本部(電波研究所),昭和 51年度。
び
電力収支予測は非常に複雑な問題である。しかし,衛
星運用計画の一次案を作るためには乙の問題を避けて通
る乙とはできず,定常的IL用いられる,従って簡単な計
算方法の開発が必m要になった訳である。とのため電力と
すむ7.

120
U4J E. Raschke and M. Pasternak ; The Global
Radiation Balance of the Earth Atmosphere Sys-
tem Obtained from Radiation Data of the Me-
teorological Satellite NIMBUS II, Space Resear-
ch VIII, pp. 1033-1043, 1968.
回 E.Raschke, T. H. Yonder Haar, W.R. Ban-
deen and M. Pasternak ; The Radiation Balance
of the Earth-Atmosphere System during June
電波研究所季報
and July 1969 from NIMBUS 3 Radiation Me-
asurements-Some Preliminary Results, Space
Research XI, pp. 661-667, 1971.
附 T.H. Yonder Haar, E. Raschke, M. Pasternak
and W. Bandeen ; The Radiation Budget of the
Earth-Atmosphere System as Measured from the
NIMBUS 3 Satellite (1969-1970), Space Research
XII, pp. 491-498, 1972.
lffllllllllllllllllllllllllllllllllllllllllllllllllllllllllllllllllllllllllllllllllllllllllllllllllllllllll』