Embed Size (px)
Citation preview

Contents lists available at ScienceDirect
Journal of the Mechanics and Physics of Solids
Journal of the Mechanics and Physics of Solids 67 (2014) 100–128
http://d0022-50
n CorrE-m
journal homepage: www.elsevier.com/locate/jmps
Effect of deformation frequency on temperature and stressoscillations in cyclic phase transition of NiTi shapememory alloy
Hao Yin a,c, Yongjun He b, Qingping Sun a,n
a Department of Mechanical and Aerospace Engineering, The Hong Kong University of Science and Technology, Hong Kong, Chinab UME-MS, ENSTA-ParisTech, Chemin de la Hunière, 91761 Palaiseau Cedex, Francec State Key Lab of Water Resources and Hydropower Engineering and School of Civil Engineering, Wuhan University, Wuhan, China
a r t i c l e i n f o
Article history:Received 25 January 2013Received in revised form2 December 2013Accepted 28 January 2014Available online 14 February 2014
Keywords:Cyclic phase transitionNiTi shape memory alloyTemperature and stress oscillationsThermomechanical couplingTime scales of phase transitionand heat transfer
x.doi.org/10.1016/j.jmps.2014.01.01396 & 2014 Elsevier Ltd. All rights reserved.
esponding author. Tel.: þ852 23588655; faxail address: [email protected] (Q.P. Sun).
a b s t r a c t
Distinctive temperature and stress oscillations can be observed in superelastic shapememory alloys (SMAs) when they subject to displacement-controlled cyclic phasetransition. In this paper, we examine the effect of the deformation frequency on thethermal and mechanical responses of the polycrystalline superelastic NiTi rods understress-induced cyclic phase transition. By synchronized measurement of the evolutions inoverall temperature and stress–strain curve over the frequency range of 0.0004–1 Hz(corresponding average strain rate range of 4.8�10�5/s–1.2�10�1/s) in stagnant air, itwas found that both the temperature evolution and the stress–strain curve varysignificantly with the frequency and the number of cycles. For each frequency, steady-state cyclic thermal and mechanical responses of the specimen were reached after atransient stage, exhibiting stabilization. In the steady-state, the average temperatureoscillated around a mean temperature plateau which increased monotonically with thefrequency and rose rapidly in the high frequency range due to the rapid accumulation ofhysteresis heat. The oscillation was mainly caused by the release and absorption of latentheat and increased with the frequency, eventually reaching a saturation value. Thevariations in the stress responses followed similar frequency dependence as the tem-perature. The steady-state stress–strain hysteresis loop area, as a measure of the material'sdamping capacity, first increased then decreased with the frequency in a non-monotonicmanner. The experimental data were analyzed and discussed based on the simplifiedlumped heat transfer analysis and the Clausius–Clapeyron relationship, incorporating theinherent thermomechanical coupling in the material's response. We found that, for givenmaterial's properties and specimen geometries, all such frequency-dependent variationsin temperature, stress and damping capacity were essentially determined by thecompetition between the time scale of the heat release (i.e. the phase transitionfrequency) and the time scale of the heat transfer to the ambient. The results emphasizethat, the two time scales of loading and heat transfer must be clearly specified whencharacterizing and modeling the cyclic behavior of SMA materials.
& 2014 Elsevier Ltd. All rights reserved.
: þ852 23581543.

Nomenclature
T temperatureT0 room temperatureTmax maximum temperature in a cycleTmin minimum temperature in a cycleTmean mean temperature in a cycleT1stmax first cycle maximum temperature
Tsmax steady-state cycle maximum temperature
T1st�halfmean first half cycle mean temperature
Tsmean steady-state cycle mean temperature
Tsmin steady-state cycle minimum temperature
ΔTs steady-state cycle temperature oscillationamplitude
ΔTtransientmax change of Tmax in transient stage
ΔTtransientmean change of Tmean in transient stage
smax maximum stress in a cycles1stmax first cycle maximum stressssmax steady-state cycle maximum stresssf forward transformation plateau stresssr reverse transformation plateau stressΔstransientmax change of smax in transient stage¼ ssmax �s1stmaxε nominal strain_ε nominal strain rateD non-isothermal hysteresis loop area
D0 isothermal hysteresis loop area at roomtemperature
Ds steady-state hysteresis loop areal0 latent heat per unit volumekf temperature coefficient for sfkr temperature coefficient for srttransient time needed to reach steady-stateNtransient number of cycles needed to reach steady-stateth lumped convection timetsh lumped convection time in the steady-statetp deformation periodtp normalized deformation period¼ðtp=tsh Þh lumped convective coefficientAf austenite finish temperaturef frequency of the cyclic deformationf modelcritical critical frequency by modelf expcritical critical frequency by experimentu end-displacement of rod specimenu0 maximum end-displacement of rod specimenλ heat capacity per unit volumeR radius of the NiTi rod specimenρ densitycp specific heat capacity per unit massk thermal conductivityL0 gauge length of the specimen
H. Yin et al. / J. Mech. Phys. Solids 67 (2014) 100–128 101
1. Introduction
Superelastic NiTi shape memory alloys (SMAs) are increasingly used in many fields, from biomedical human artificialjoints to small-scale sensors and actuators in micro-electro-mechanical-systems (MEMS). This material also has potentialapplications in devices of vibration and damping control for large and small scale engineering structures. These applicationsutilize the material's large deformation and damping capacity from reversible transformations between austenite andmartensite phases. Miyazaki et al. (1986) first found that residual strain, transformation stress and the hysteresis loopchanged significantly during cyclic deformation. Since the fatigue and degradation of the devices strongly rely on thethermal and mechanical responses of the material in the cyclic transformation (see Stalmans et al., 1994; Strnadel et al.,1995; Abeyaratne and Kim, 1997; Tobushi et al., 1997; Otsuka and Wayman, 1998; Hornbogen, 2002; Dolce and Cardone,2005; Nemat-Nasser and Guo, 2006; Zaki and Moumni, 2007; Demers et al., 2009; Kang et al., 2009; Morin et al., 2011a,2011b), performances of the material under cyclic loading are always of key concern in the applications (Piedboeuf et al.,1998; Dolce and Cardone, 2001; Lim and McDowell, 2002; Saadat et al., 2002; Puglisi and Truskinovsky 2005; Dolce andCardone, 2005; Predki et al., 2006; Pan and Cho, 2007; Soul et al., 2010). One important aspect of the mechanical behaviorsof SMA material is the strong rate or frequency dependence (Van Humbeeck and Delaey, 1981; Piedboeuf et al., 1998;Tobushi et al., 1998; Gandhi and Wolons, 1999; Liu et al., 1999; Schmidt and Lammering, 2004; Pieczyska et al., 2005; Zhuand Zhang, 2007; Grabe and Bruhns, 2008; Soul et al., 2010; He and Sun, 2010a, 2010b; Zhang et al., 2010; Amini et al., 2011;He and Sun, 2011; Morin et al., 2011a, 2011b; Sun et al., 2012; Yan et al., 2012; Yin and Sun, 2012; Ahadi and Sun, 2013; Yinet al., 2013) due to heat generation, heat accumulation, heat transfer and the intrinsic temperature dependence of thetransformation stress of the material (Clausius–Claperyon relation). Many researchers (see Van Humbeeck and Delaey, 1981;Leo et al., 1993; Ortin, 1995; Shaw and Kyriakides, 1995, 1997; Brinson et al., 2004; Petryk, 2005; Vitiello et al., 2005; Grabeand Bruhns, 2008; Bernardini and Rega, 2010; He et al., 2010; Morin et al., 2011a, 2011b; among many others) have shownthat there exists a complex interaction and coupling among the stress, internal heat sources and temperature fields. Thestress–strain responses of the material in the cyclic phase transitions are intrinsically non-isothermal and are accompaniedby distinctive oscillations in the strain and the temperature fields (Zhu and Zhang, 2007; Heller et al., 2009; Torra et al.,2010; He and Sun, 2010a; Soul et al., 2010; Morin et al., 2011a, 2011b; Yin, 2013). Both the amplitude of the oscillation andthe mean value of the temperature vary significantly with the deformation frequency. From both academic and practicalpoints of view, a comprehensive understanding of the coupling effect and the roles of the time scales of phase transition (orthe frequency of the loading) and heat transfer in the thermal and mechanical responses of the material is required (Ortinand Delaey, 2002; He and Sun, 2010a; Sun et al., 2012). However, these important aspects remain relatively unexplored, both

H. Yin et al. / J. Mech. Phys. Solids 67 (2014) 100–128102
experimentally and theoretically. Systematic, well controlled experiments over a wide range of deformation frequenciesplay critical roles in obtaining first hand data and in comprehending and modeling such multi-scaled phenomena. At thesame time, in order to have a clear picture of the non-isothermal cyclic responses of the NiTi material, the following keyphysical factors must be taken into consideration:
(1)
Internal heat sources: From the continuum mechanics point of view, a nonlinear, non-monotonic constitutive equationcan be used to describe the first order phase transition process in NiTi polycrystals where typical instability events ofnucleation of high strain domains, at both micro- and macro-levels, are involved in the process (Shaw and Kyriakides,1997; Brinson et al., 2004; Heller et al., 2009; Torra et al., 2010; Zhang et al., 2010; Sun and He, 2008; He and Sun, 2009,2010a, 2010b, 2010c; Soul et al., 2010; Delpueyo et al., 2011, 2012). This localized transformation (deformation) alsoserves as the heterogeneous heat source since it is accompanied by the release of the latent heat and the hysteresis heatof the material at the macroscopic level. The hysteresis heat released is approximately equal to the area of the stress–strain hysteresis loop in each specific cycle, ignoring the energy transmitted to the ambient surroundings byacoustic waves.(2)
Heat transfer: The generated heat will transfer via conduction within the specimen (at the two clamping ends as well)and through convection between the specimen and the external ambient, leading to a swift temperature variation of thematerial and strongly affecting the overall stress–strain responses since the stress is temperature dependent (Clausius–Claperyon relation).(3)
Competition of different physical processes that have different characteristic time scales: At the macroscopic level, the heatgeneration and exchange between the specimen and the environment (via the clamping grips and the ambient) undercyclic phase transition depend on both the deformation frequency (providing a time scale of the heat release) and theambient condition (defining the time scale of heat transfer to the outside) (Ortin and Delaey, 2002; He and Sun, 2010a;He et al., 2010). This also implies that the temperature variations and therefore the stress–strain responses of thematerial strongly depend on particular specimen geometry (such as the shape and size of the rod, strip or tube) and theambient conditions (air or water of different velocities).(4)
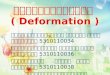
The coupling between thermal and mechanical quantities: This is demonstrated in Fig. 1 by comparing the heat source andthe temperature profile with the stress–strain curves during the transient stage (Yin, 2013). The temperature variation(due to the release and transfer of the latent and hysteresis heat) and the stress–strain response (N.B. the area of thestress–strain hysteresis loop itself is the heat source) are strongly coupled to each other and continuously change beforereaching their respective steady-state profiles.When modeling and understanding the cyclic responses of SMAs, one must fully recognize that the material nonlinearity(i.e. phase transition), non-equilibrium (heat transfer) and the coupling are inherent in the cyclic phase transition processand constitute the main physical origins of the observed temporal evolution of the thermal and mechanical fields. The abovefactors also pose challenging issues in experimental quantification of the cyclic responses of the material. Firstly, thetransient temperature variations of the specimen during the cyclic phase transitions must be measured with sufficienttime resolution, especially for high frequency loading. Secondly, the specific heat transfer condition of the specimen withthe ambient must be well calibrated and controlled, because the tests with specimens of different size and shape in differentsurrounding ambient can give totally different results (Shaw and Kyriakides, 1995; He et al., 2010; He and Sun, 2011).Thirdly, to have a good understanding of the physical processes, the measurements of the mechanical and thermalquantities need to be synchronized. Special loading and measurement facilities need to be developed to meet thesechallenges. Finally, in modeling and understanding this complicated process, simple method and model must be developedto get insight on the nature of the process and to identify the key governing parameters.
Another important issue in the cyclic response of NiTi is the physical mechanism underlying the observed stabilization inthe hysteretic response (see Piedboeuf et al., 1998; Liu et al., 1999; Schmidt and Lammering, 2004; Zhu and Zhang, 2007; Heand Sun, 2010a; Morin et al., 2011a, 2011b). Different from the cyclic loading of ductile metals where a stabilized hystereticstress–strain response can be reached (Courtney, 1990, McGraw-Hill) due to the generation and saturation of defects (suchas dislocations) at microscopic level, the cyclic phase transition of NiTi SMA involves at least two mechanisms of differentphysical origins which coexist and interact to reach stabilization. The first mechanism is the generation and saturation ofcomplex dislocation microstructures in the grain boundaries of the NiTi polycrystal due to the back-and-forth motion ofphase boundaries. This mechanism can lead to both residual martensite and macroscopic plastic deformation (as part of theresidual strain) during either deformation or thermal cycling (Stachowiak and McCormick, 1988; Stalmans et al., 1992; Boand Lagoudas, 1999; Lagoudas and Bo, 1999; Ortin and Delaey, 2002; Kockar et al., 2008; Yang et al., 2012). In thedeformation cycles (Miyazaki et al., 1986; Tanaka et al., 1992, 1993; Strnadel et al., 1995; Abeyaratne and Kim, 1997; Ortinand Delaey, 2002; Pieczyska et al., 2005; Nemat-Nasser and Guo, 2006; Demers et al., 2009; Kang et al., 2009; Morin et al.,2011a, 2011b), the superelastic stress–strain loop drifts with the number of cycles; the transformation stress and hysteresisarea decrease and residual strain increases monotonically. They can eventually become saturated after about 100 cycles(Notice that it is true only for the samples used in the present test, in general, the number of cycles for shakedown alsodepends on the ambient temperature and the applied strain amplitude). This mechanism of stabilization by deformation(plasticity/dislocation) is very effective in stabilizing the superelasticity and is often employed to train the specimen prior to

0 2 4 60
200
400
600
Nom
inal
Str
ess
σ (M
Pa)
Nominal Strain ε (%)
0 2 4 620
30
40
50
Cycles n
Tem
per
atu
re T
(C
)
0 30 60 90 120 150
20
40
60
80
Cycles n
Tem
per
atu
re T
(C
)
0 2 4 60
150
300
450
the 1st cycle
the 5th cycle
Nom
inal
Str
ess
σ (M
Pa)
Nominal Strain ε (%)
Drifts and Oscillations
of Temperature
Change of stress and
stress-strain curves
Heat release and heat transfer (Hysteresis
heat in each cycle continuously
changes during the transient stage)
Via Clausius-Clapeyron relation
Heating (A→M)
Cooling (M→A)
d�tT� ))((
Heating (A→M)
Cooling (M→A)
Change of temperature
Temperature profiles in the 150 cycles at 1 Hz Stress-strain curves in the 150 cycles at 1Hz
Transient
stage
Steady-state
Stage (n>100)
Synchronized
tSselcyc5tsrifehtniseliforperutarepmeT ress-strain curves in the first 5 cycles
Synchronized
20MPa
5 C
))t(T(σ)(tT
The 1 cycle
The 5 cycle
The steady-state
cycle (n>100)
Fig. 1. Schematics showing the coupling between the thermal and mechanical responses of the rod in the transient stage.
H. Yin et al. / J. Mech. Phys. Solids 67 (2014) 100–128 103
actual service. The second mechanism of stabilization is the thermomechanical coupling (see Fig. 1), it operates via thetemperature variation of the specimen (caused by the latent heat release/absorption, hysteresis heat release and the heattransfer with the ambient) and the temperature dependence of the transition stress. For an as-received fresh specimen, thissecond mechanism works interactively under cyclic transformation with the first mechanism to reach the stabilized cyclicresponse of the material. Preliminary experiments on the trained NiTi rods where the first mechanism has reachedsaturation (Tobushi et al., 1998; Torra et al., 2010; He and Sun, 2010a; Soul et al., 2010; Yin, 2013) showed that the secondmechanism alone can produce a distinctive frequency-dependent temperature variation, leading to the change of the stress–strain curve and the hysteresis loop area (damping capacity). Although research work on the thermomechanical couplingand cyclic behavior of NiTi have increased rapidly over the past decades (Miyazaki et al., 1986; Stachowiak and McCormick,1988; Tanaka et al., 1992, 1993; Abeyaratne and Kim, 1997; Bo and Lagoudas, 1999; Lim and Mcdowell, 2002; Nemat-Nasserand Guo, 2006; Zaki and Moumni, 2007; Zhu and Zhang., 2007; Torra et al., 2010; Heller et al., 2009; Bernardini and Rega,2010; He and Sun, 2010a; Morin et al., 2011a, 2011b), much work remains to be done on the role of the second mechanism inthe cyclic responses of NiTi. In particular, systematic experiments and modeling which aim at revealing the roles of the heatrelease and the heat transfer and the associated characteristic time scales in the responses over a wide range of loadingfrequencies are required.
This paper reports the experiments and analysis on the time evolution of temperature and stress–strain curves ofsuperelastic NiTi polycrystalline shape memory alloy rods during the reversible phase transitions under cyclic tensiledeformation at different frequencies in stagnant air. Section 2 describes the NiTi material, the specimen and the experimentalsetups. Section 3 reports on the experimental results obtained from synchronized measurement of the temperature andstress–strain history of the specimen. The physical origins of the observed phenomena and the important roles of thegoverning parameters and thermo-mechanical coupling in the observed transient and steady-state (stabilized) behavior are

Pump
input
Grip
40mm
Dis
pla
cem
ent
Crosshead
Movable Cylinder (gives displacement input)
output
Grip
Thermocouples(25um diameter)
MTS clamps
Thermocouple No. 1Thermocouple No. 2Thermocouple No. 3
Time
Tem
per
ature
Time
Test specimen
Data Logger (records temperature oscillation)
26.5°C
Load cell (records stress oscillation)
output
Positioning nuts
Str
ess
Tungsten steel clamps with pyramid-shaped teethTime
Fig. 2. Schematic drawing showing the experimental set-up for the synchronized measurement of thermal and mechanical quantities.
Table 1Thermal and mechanical properties of the polycrystalline NiTi SMA rod.
Property Symbol Unit Value
Specific heat capacity per unit mass cp J/(kg K) 500Density ρ kg m�3 6450Heat capacity per unit volume λ¼ρcp J/m3 K 3.225�106
Latent heat per unit volume l0 J/m3 7.74�107
Isothermal hysteresis heat per unit volume D0 J/m3 6.58�106
Temperature coefficient for isothermal forward transformation kf MPa/K 6.56Temperature coefficient for isothermal reverse transformation kr MPa/K 7.09Austenite finish temperature Af 1C 17.13
H. Yin et al. / J. Mech. Phys. Solids 67 (2014) 100–128104
discussed. In Section 4, theoretical analysis is performed to understand the phenomena and is compared with theexperimental data. The conclusions are given in Section 5.
2. Material, specimen preparation and experimental setups
The material used in the experiment was a commercial superelastic polycrystalline, straight annealed, NiTi rod of 3.5 mmdiameter with a dark oxide surface (Johnson Matthey Inc., USA). The overall length of the rod specimen used in theexperiment was 70 mm with 15 mm clamping length at each end, so the gauge length of the specimen was 40 mm (Fig. 2).The austenite finish temperature Af of the material is 17.1 1C so the starting phase of the specimen is austenite at roomtemperature (25 1C) and will exhibit superelastic behavior under stress. The grain size of the specimen is about 100 nm, thelatent heat, isothermal hysteresis heat (i.e. the isothermal stress–strain loop area after training), heat capacity and otherthermomechanical properties of the material are listed in Table 1. The coefficients kf and kr for the temperature dependenceof the forward (A-M) and reverse (M-A) transformation plateau stresses measured by the isothermal tensile test atdifferent constant temperatures are also listed in Table 1. All specimens used in the test were cut from the same piece of rod.
Displacement-controlled sinusoidal cyclic tensile loading and unloading was carried out on a MTS 858 universal testingmachine with a hydraulic power unit. To examine the effect of frequency on the thermal and mechanical responses, 15 cyclicdeformation frequencies ranging from 0.0004 Hz to 1 Hz (average strain rate 4.8�10�5/s–1.2�10�1/s) were used in thetest as shown in Table 2. The measurement of the evolutions of the stress–strain curve and the surface temperature of thespecimen were synchronized in the test. Specially designed grips clamped the rod specimen to ensure that no slip occurredbetween the specimen and the grips during the cyclic tests (Fig. 2).
An ultra-thin naked ‘K’ type thermocouple (from Omega, USA) having a diameter of 0.025 mm and relaxation time of0.05 s was used to capture the rapid temperature variation in the high frequency cyclic phase transition. Two very thin

Table 2Summary of cyclic loading conditions of the 15 tests.
Test no. 1 2 3 4 5
Frequency (Hz) 4�10�4 7�10�4 1�10�3 2�10�3 4�10�3
Average strain rate (s�1) 4.8�10�5 8.4�10�5 1.2�10�4 2.4�10�4 4.8�10�4
Test no. 6 7 8 9 10
Frequency (Hz) 7�10�3 1�10�2 2�10�2 4�10�2 7�10�2
Average strain rate (s�1) 8.4�10�4 1.2�10�3 2.4�10�3 4.8�10�3 8.4�10�3
Test no. 11 12 13 14 15
Frequency (Hz) 1�10�1 2�10�1 4�10�1 7�10�1 1Average strain rate (s�1) 1.2�10�2 2.4�10�2 4.8�10�2 8.4�10�2 1.2�10�1
H. Yin et al. / J. Mech. Phys. Solids 67 (2014) 100–128 105
connection cables of the thermocouple were electrically insulated by RTV silicon (Versachem, USA). To ensure good contact,the thermocouple was pasted on the surface of the specimen using Kapton Tape. In our experiments, it should be noticedthat the localized transformation domains in NiTi lead to a non-uniform temperature field but heat conduction always tendsto make the temperature uniform. This means that for most of the deformation period, the temperature field can be treatedas uniform due to heat conduction (see Appendix A for more detailed analysis). To check the position-dependence in themeasured temperatures, three thermocouples were located at different points along the gauge length section (Fig. 2). Theresults showed that the response from these three thermocouples were almost identical (Fig. 2) at the frequency of0.0007 Hz, so the spatial inhomogeneity of the measured temperature within the gauge length can be ignored and the datafrom a single thermocouple can be used as the specimen's representative temperature (i.e. volume-averaged temperature).The time evolution of the temperature was recorded by an Agilent 34970A data logger with maximum 215 readingsper second. Typically more than 50 temperature data points were acquired in each cycle.
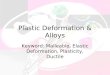
The experiments were conducted in the lab with ambient static air temperature of 25 1C. The transfer of heat betweenthe specimen and the surroundings in the actual experiment was attributed to conduction via the grips and convection viaair. The heat transfer condition of the rod specimen can be characterized by an overall lumped convective coefficient hwhich was measured by an independent experiment. To measure h under actual test conditions, the NiTi rod was insertedinto two stainless steel blocks (made of the same material having the same depth of contact as the grips, see Fig. A2(b) inAppendix A) and heated by electric resistance heating. The electrical current ranges from 0.2 A to 25 A to achieve differentstable temperature differences ΔT between the rod and the air (ΔT ranges from 0 1C to 127 1C). The overall lumpedconvective coefficient h of the rod specimen consists of two terms representing the contribution from pure conduction andpure convection respectively (as shown in Eq. (A9), details discussed in Appendix A). The measured relationship between hand ΔT (see Holman, 2009) is summarized in Fig. 3(a).
To remove the effect of cyclic plasticity due to dislocation (the first mechanism), the fresh as-received rod specimen wastrained by cyclic deformation for 200 cycles at strain rate 1.5�10-3/s with a maximum strain of 7.5% to ensure fulltransformation and eliminate the effect of dislocation. A preload stress of 10 MPa was applied in order to avoid unexpectedcompression in training. As shown in Fig. 3(b), such training leads to the mechanical shake down of the stress–strain curvewith a final repeating hysteresis loop, which is evidenced by a gradual decrease and saturation (E100 MPa) of the appliedstress and a gradual increase and saturation (E1%) of the residual strain. With such training, the effect of the firstmechanism in the subsequent cyclic tests can be ignored. Cyclic tests were then performed on the trained specimen underdisplacement-controlled sinusoidal deformation which gives a cyclic strain variation from 0%-6%-0% (see Fig. 2). Aprogrammed preload of 50 MPa was set for each cyclic test to avoid possible compression in high frequency unloading incase there was an unexpected undershoot of the machine.
All the tested specimens had been trained before the cyclic tests. Moreover, Fig. 3(c) shows the stress–strain curves (atstrain rate of 1.2�10�3/s and with a pre-stress of 50 MPa) for a single rod specimen after each of the 9 cyclic tests. It is seenthat the changes in the stress–strain curves are very small (except the one at 1 Hz), therefore the damage caused by thecyclic loading was judged as ignorable.
3. Experimental results
The variations of temperature and stress–strain curves due to the pure thermal effect (i.e. via the second mechanism)during cyclic loading mainly consist of two stages: transient stage and steady-state stage. The effect of the deformationfrequency on the temperature and the stress–strain responses in the two stages will be reported in Sections 3.1 and 3.2respectively.

0 2 4 6 80
100
200
300
400
500
Nominal Strain ε (%)
No
min
al S
tres
s σ
(MP
a)
0 25 50 75 100 125 1500
25
50
75
100
125
Fitted h: 30+12 (ΔT/L)1/4 (Holman, 2009)
Experiment data of h
th=(λR/2h)
Lum
ped
convec
tion t
ime
t h (s)
Lum
ped
convec
tive
coef
fici
ent
h (
W/(
m2K
))
ΔΤ (oC)
.
0
15
30
45
60
0 1 2 3 4 5 60
100
200
300
400
500
After 1Hz cyclic test
After 0.7Hz cyclic test
After 0.4Hz cyclic test
After 0.2Hz cyclic test
After 0.1Hz cyclic test
After 0.07Hz cyclic test
After 0.04Hz cyclic test
After 0.02Hz cyclic test
After 0.004Hz cyclic test
No
min
al s
tres
s (M
Pa)
Norminal strain (%)
Programmed
maximum strain
Programmed end load
Residual strain after training
First training cycle
Steady-state cycles (n≥150)
Fig. 3. (a) Measured lumped convective coefficient h of the rod heated to different temperatures by electric resistance, the fitted curves for h and thelumped characteristic convection time th , (b) evolution of the nominal stress–strain curves of the NiTi rod with the training cycles in the pre-test training atstrain rate 1.5�10�3/s and (c) the stress–strain curves at strain rate of 1.2�10�3/s after each cyclic test.
H. Yin et al. / J. Mech. Phys. Solids 67 (2014) 100–128106
3.1. Temperature and stress variations in the transient stage
Figs. 4–6 show the typical results of the measured temperature variations and non-isothermal stress–strain curves at thelow, intermediate and high frequencies of 0.0007 Hz, 0.04 Hz and 1 Hz respectively. The measured temperature and stressoscillations for all 15 frequencies are summarized in Figs. 7 and 8, respectively, showing that the cyclic responses of thespecimen are highly dependent on frequency. For each frequency, there exists a transient stage where the response driftswith the number of cycles until it eventually reaches the steady-state stage.

0
4
8
12
16
20
Cycles n
Nom
inal
str
ain ε
(%
)
εT
σ
2 3-200
0
200
400
600
800 No
nim
al stress σ (M
Pa)
0
20
40
60
80
Tem
per
ature
T (
oC
)
0 1 2 3 4 5 60
200
400
600
No
min
al S
tres
s σ
(MP
a)
Nominal Strain ε (%)
0 1 2 3 4 5
20
40
60
80
Tem
per
ature
T (
oC
)
Cycles n
Steady-state cycles
The first cycle
0.0007Hz
Isothermal caseCT os
min 1.21= CT osmean 1.25=
CT osmax 1.29=CT os 0.8=Δ
Programmed preload
Fig. 4. Evolutions of (a) temperature and (b) stress–strain curve from transient to steady-state under cyclic deformation of the trained rod at the lowdeformation frequency of 0.0007 Hz. The synchronized stress, strain and temperature variations in a steady-state cycle are shown in (c) (Ts
max – steady-statemaximum temperature, Ts
min – steady-state minimum temperature, Tsmean – steady-state mean temperature, ΔTs – steady-state temperature oscillation
amplitude).
0 1 2 3 4 5 60
200
400
600
No
min
al S
tres
s σ
(MP
a)
Nominal Strain ε (%)
0 5 10 15 20 25 30
20
40
60
80
Tem
per
ature
T (
oC
)
Cycles n
Steady-state cycles
(n≥8)
The first cycle
Isothermal case
0
4
8
12
16
20 No
nim
al stress σ(M
Pa)T
emper
ature
T (
oC
)
σ
T
ε
Nom
inal
str
ain ε
(%)
14 15Cycle n
-200
0
200
400
600
800
0
20
40
60
80
0.04Hz
CT osmin 6.17=
CT osmean 9.28=
CT osmax 3.40=CT os 7.22=Δ
Fig. 5. Evolutions of (a) temperature and (b) stress–strain curve from transient to steady-state under cyclic deformation of the trained rod at theintermediate deformation frequency of 0.04 Hz. The synchronized stress, strain and temperature variations in a steady-state cycle are shown in (c) (Ts
max –
steady-state maximum temperature, Tsmin – steady-state minimum temperature, Ts
mean – steady-state mean temperature, ΔTs – steady-state temperatureoscillation amplitude).
H. Yin et al. / J. Mech. Phys. Solids 67 (2014) 100–128 107

0
4
8
12
16
20
-200
0
200
400
600
800
0
20
40
60
80
Cycle n
No
nim
al stress σ(M
Pa)
ε
T σ
Tem
per
ature
T (
oC
)
Nom
inal
str
ain ε
(%)
120 121
0 1 2 3 4 5 60
200
400
600
Nominal Strain ε (%)
No
min
al S
tres
s σ
(MP
a)
Steady-state cycles
(n≥100)
The first cycle
Isothermal case
0 30 60 90 120 150
20
40
60
80
Cycles n
Tem
per
atu
re T
(oC
)
0.0 0.2 0.4 0.6 0.8 148.0 148.2 148.4 148.6 148.8 149.0
20
30
40
50
60
70
80Steady state cycle
23.0oC
Tem
per
ature
T (
oC
)
Time t (s)
20.6oC
1st cycle
1Hz
CT osmin 4.49=
CT osmean 9.60=
CT osmax 4.72=
CT os 0.23=Δ
Fig. 6. Evolutions of (a) temperature and (b) stress–strain curve from transient to steady-state under cyclic deformation of the trained rod at the highdeformation frequency of 1 Hz. The synchronized stress, strain, temperature variations in a steady-state cycle are shown in (c) (Ts
max – steady-statemaximum temperature, Ts
min – steady-state minimum temperature, Tsmean – steady-state mean temperature, ΔTs - steady-state temperature oscillation
amplitude). (d) Comparison of temperature evolution and stress–strain response between the first cycle and the steady-state cycle (n¼149).
H. Yin et al. / J. Mech. Phys. Solids 67 (2014) 100–128108
As shown in Fig. 4, at the very low frequency of 0.0007 Hz where the average strain rate in the cycle was only 8.4�10�5/s, thetransient stages of the temperature and the stress–strain curve were much less obvious. The temperature oscillated with theamplitude of ΔTs¼Ts
max�Tsmin¼8.0 1C in each cycle and there was no observable difference between the first cycle and the steady-
state cycles. The corresponding superelastic stress–strain curves of all cycles, though non-isothermal due to the release/absorptionof the latent heat and hysteresis heat, almost coincided with each other as shown in Fig. 4(b). At this low frequency, the heat effecton the cyclic thermal and mechanical responses was very limited since the heat transfer via convection and conduction was muchfaster than the heat generation (i.e. loading time of 714 s). The mean temperature of each cycle (Tmean¼25.1 1C) was only a littlehigher than the room temperature (25 1C). Compared with the isothermal case (see the isothermal curve with two flat plateaus inFig. 4(b)), the stress–strain curve exhibited a little hardening and the hysteresis loop area (D) was very close to the isothermal case(D0) for the post-trained specimen. It is well recognized (see Muller and Villaggio, 1977; Puglisi and Truskinovsky, 2005; Petryk,2005; Ortin, 1995; Ortin and Delaey, 2002; Planes and Manosa, 2001; Sun and He, 2008) that the isothermal hysteresis loop area(also called rate-independent hysteresis in literature) is mainly caused by microscopic level mechanical dissipative events and canbe used as a characteristic property of the polycrystalline material.
At the intermediate frequency of 0.04 Hz (see Fig. 5), the deformation period tp (¼ 1=f ) was 25 s, close to thecharacteristic lumped convection time th (23–60 s, see Fig. 3(a)) of the specimen. The heat release time at this frequency was

0 30 60 90 120 150
20
40
60
80
Cycles n
Tem
per
atu
re T
(C
)
0 30 60 90 120
20
40
60
80
Cycles n
Tem
per
atu
re T
(C
)
0 30 60 90 120
20
40
60
80
Tem
per
ature
T (
C)
Cycles n
0 10 20 30 40 50
20
40
60
80
Cycles n
Tem
per
ature
T (
C)
0 10 20 30 40 50
20
40
60
80
Tem
per
atu
re T
(C
)
Cycles n0 5 10 15 20 25 30
20
40
60
80
Cycles n
Tem
per
atu
re T
(C
)
0 5 10 15 20 25
20
40
60
80
Tem
per
atu
re T
(C
)
Cycles n0 3 6 9 12 15
20
40
60
80
Cycles n
Tem
per
atu
re T
(C
)
0 3 6 9
20
40
60
80
Cycles n
Tem
per
atu
re T
(C
)
0 3 6 9
20
40
60
80
Tem
per
atu
re T
(C
)
Cycles n0 1 2 3 4 5 6
20
40
60
80
Cycles n
Tem
per
atu
re T
(C
)
0 1 2 3 4 5 6
20
40
60
80
Tem
per
ature
T (
C)
Cycles n
0 1 2 3 4 5 6
20
40
60
80
Cycles n
Tem
per
ature
T (
C)
0 1 2 3 4 5
20
40
60
80
Tem
per
atu
re T
(C
)
Cycles n0 1 2 3 4 5
20
40
60
80
Cycle n
Tem
per
atu
re T
(C
)
CT osmax 0.37=
0.2Hz
0.04Hz0.02Hz
0.0004Hz 0.001Hz
0.1Hz
0.004Hz
0.4Hz
0.01Hz
1Hz
0.0007Hz
0.002Hz 0.007Hz
0.07Hz
0.7Hz
CT osmax 6.27= CT os
max 1.29= CT osmax 3.30=
CT osmax 7.32= CT os
max 3.35= CT osmax 7.36=
CT osmax 9.37= CT os
max 3.40=
CT osmax 9.42= CT os
max 3.45=CT os
max 6.50=
CT osmax 8.58= CT os
max 5.66=CT os
max 4.72=
CT osmean 0.25=
CT osmean 1.31=
CT osmean 9.26=
CT osmean 7.25=
CT osmean 1.47=
CT osmean 1.25=
CT osmean 3.33=
CT osmean 5.27=
CT osmean 2.26=
CT osmean 8.54=
CT osmean 5.25=
CT osmean 5.38=
CT osmean 9.28=
CT osmean 7.26=
CT osmean 9.60=
CT os 2.5=Δ
CT os 0.14=Δ
CT os 0.8=Δ
CT os 3.18=Δ
CT os 2.20=Δ CT os 9.20=Δ
CT os 7.9=Δ
CT os 0.20=Δ
CT os 7.22=Δ
CT os 7.23=Δ CT os 1.24=Δ CT os 3.24=Δ
CT os 5.23=ΔCT os 4.23=Δ CT os 0.23=Δ
Fig. 7. Temperature evolutions of the trained rod specimen under cyclic deformation of 15 different frequencies (ΔTs – steady-state temperature oscillationamplitude, Ts
max – steady-state maximum temperature, Tsmean – steady-state mean temperature).
H. Yin et al. / J. Mech. Phys. Solids 67 (2014) 100–128 109
comparable to the system's heat transfer time. The measured temperature and stress–strain responses showed significanttransient stages before they finally reached their respective steady-states. As the thermal effect strengthened, it broughtsignificant oscillation and non-isothermal features to the temperature variation and the stress–strain curves. The magnitudeof the temperature oscillation ΔT reached about 23 1C and the whole temperature profile drifted down with the number ofcycles but the mean temperature in a cycle (Tmean) of the specimen was still higher than room temperature. The total drift inthe mean temperature was –6 1C in the transient stage bringing the steady-state mean temperature to 28.9 1C.Correspondingly, the maximum temperature (peak value) Tmax of a cycle decreased from 46.5 1C in the first cycle to40.3 1C in the steady-state cycles. Compared with the case of the low frequency cyclic loading in Fig. 4, the increases in boththe steady-state temperature oscillation amplitude ΔTs and the mean temperature Ts
mean were more significant. At thisfrequency, the start temperature of the second cycle was lower than that of the first cycle and the start temperature of thethird cycle was lower than that of the second cycle. The start temperature continued decreasing until it reached its steady-state value. About 7 cycles were needed to reach the steady state. Because of the temperature dependence of the stress, thecorresponding cyclic stress–strain curves became a hardening type (mainly due to self-heating caused by latent heat inloading and self-cooling in unloading). Accompanying the mean temperature decrease in the transient stage, the stress–strain curve drifted downward, eventually reaching its steady-state loop.

0 1 20
200
400
600
No
min
al S
tres
s �
(MP
a)N
om
inal
Str
ess �
(MP
a)N
om
inal
Str
ess �
(MP
a)N
om
inal
Str
ess �
(MP
a)N
om
inal
Str
ess �
(MP
a)
No
min
al S
tres
s �
(MP
a)N
om
inal
Str
ess �
(MP
a)N
om
inal
Str
ess �
(MP
a)N
om
inal
Str
ess �
(MP
a)N
om
inal
Str
ess �
(MP
a)
No
min
al S
tres
s �
(MP
a)N
om
inal
Str
ess �
(MP
a)N
om
inal
Str
ess �
(MP
a)N
om
inal
Str
ess �
(MP
a)N
om
inal
Str
ess �
(MP
a)
Cycles n Cycles n Cycles n
Cycles n Cycles n Cycles n
Cycles n Cycles n Cycles n
Cycles n Cycles n Cycles n
Cycles n Cycles n Cycles n
0 1 2 3 40
200
400
600
0 1 2 30
200
400
600
0 1 2 3 40
200
400
600
0 1 2 3 40
200
400
600
0 1 2 3 4 5 6 70
200
400
600
0 1 2 3 4 50
200
400
600
0 2 4 6 8 100
200
400
600
0 4 8 12 160
200
400
600
0 4 8 12 16 20 240
200
400
600
0 10 20 300
200
400
600
0 10 20 300
200
400
600
0 20 40 60 800
200
400
600
0 20 40 60 80 1000
200
400
600
0 30 60 90 120 1500
200
400
600
0.0007Hz
1Hz0.4Hz
0.04Hz
0.004Hz
0.07Hz
0.0004Hz 0.001Hz
0.002Hz
0.01Hz 0.02Hz
0.2Hz
0.7Hz
MPas 9.418max =σ MPas 9.418max =σ MPas 9.427max =σ
MPas 4.436max =σ MPas 0.449max =σ
MPas 9.456max =σ
MPas 1.460max =σ MPas 6.466max =σ MPas 3.474max =σ
MPas 2.482max =σ MPas 4.489max =σ MPas 4.511max =σ
MPas 7.548max =σ MPas 8.592max =σ MPas 2.611max =σ
st1
maxσ
st1
maxσst1
maxσst1
maxσ
st1
maxσ st1
maxσ st1
maxσ0.1Hz
st1
maxσst1
maxσst1
maxσ
0.007Hz
Fig. 8. Stress evolutions of the trained rod specimen under cyclic deformation of 15 different frequencies (ssmax – steady-state maximum stress, s1stmax - firstcycle maximum stress).
H. Yin et al. / J. Mech. Phys. Solids 67 (2014) 100–128110
At the frequency of 1 Hz (see Fig. 6), the forward phase transition time (tp/2) was only about 0.5 s which was muchshorter than the characteristic lumped convection time th of the specimen (23–60 s as shown in Fig. 3(a)). The thermaleffect on the cyclic responses became even more significant (Fig. 6). On the one hand, the fast release/absorption of the

H. Yin et al. / J. Mech. Phys. Solids 67 (2014) 100–128 111
latent heat caused a very rapid temperature increase/decrease of the specimen and made the temperature oscillationamplitude to reach the saturation value of 23 1C. On the other hand, the released heat from the hysteresis loop (mechanicaldissipative heat) in each loading–unloading cycle had insufficient time to transfer out (because tp{th ) and rapidlyaccumulated in the specimen. This hysteresis heat accumulation caused a large increase in the mean temperature (Tmean) ofthe specimen and a significant shift up of the stress–strain loops. As shown in Fig. 6(a), Tmean increased to a saturationplateau of 60.9 1C. The saturation was due to a balance between the hysteresis heat release and the heat transfer toenvironment. During the transient stage, the increase of Tmean also increased the amount of heat transferred out (becauseheat convection increases with Tmean–T0). In the steady-state stage, the heat transferred out equaled to the hysteresis heatreleased so there was no further heat accumulation inside the specimen and Tmean did not increase further (i.e. saturation).The amplitude of the temperature oscillation in the transient stage was almost constant for all cycles. The little change in thetemperature oscillation amplitude shown in Fig. 6(d) (ΔT¼20.6 1C for the 1st cycle while ΔTs¼23.0 1C for the steady-statecycle) was due to the undershoot of the machine (in the starting cycles the maximum strain did not reach the prescribedvalue (6%)). The peak value of the temperature (Tmax) increased from 46.5 1C in the first cycle to 72.4 1C in the steady-statecycles. It took about 110 cycles to reach the steady-state. The corresponding stress–strain curves that exhibited stronghardening due to rapid temperature increase/decrease in loading/unloading shifted upward significantly and eventuallyreached a stable loop because of the repeated temperature variation in the steady-state and the temperature dependence ofthe transformation stress. It is noticed that the steady-state non-isothermal hysteresis loop area at 1 Hz is much smallerthan the isothermal case and no longer represents a characteristic property of the material (see He et al., 2010; He and Sun,2011 on the rate dependent hysteresis loop area).
Figs. 7 and 8 summarize the variations of temperature and stress with time for all the cyclic tests at 15 differentfrequencies. For all the cases, the temperature variation with time at each frequency can be treated as the superposition ofan oscillation part over a mean temperature part. The amplitude of the temperature oscillation increased monotonicallywith the frequency and finally reached a saturated value (see the cases of 0.4 Hz, 0.7 Hz and 1 Hz in Fig. 7). The meantemperature in a cycle (Tmean) was always higher than the room temperature T0 (¼25 1C). It drifted down with the numberof cycles for the intermediate frequency deformation (see the cases from 0.004 Hz to 0.1 Hz in Fig. 7) and drifted up for highfrequency deformation (see the cases from 0.2 Hz to 1 Hz in Fig. 7) until the steady-state (Ts
mean) was reached. The number ofcycles needed to reach the steady-state for each frequency of loading varied with the loading frequency. As will be discussedin Section 4, the time scale of the transient stage is related to the characteristic heat transfer time of the system (i.e. thespecimen and the ambient). The difference of the maximum temperatures between the first and steady-state cycles(ΔTtransient
max ¼ Tsmax�T1st
max) varies non-monotonically with the frequency as shown in Fig. 9. We can see the same trend in thedifference of the mean-temperature between the first and the steady-state cycles (ΔTtransient
mean ¼ Tsmean�T1st�half
mean ) as plotted inFig. 9 for comparison (N.B. in the experiment, we used the mean temperature over half cycle to have more data points and tobetter describe the transient stage temperature change).
For each frequency, the measured stress–strain curves changed with the number of cycles in the transient stage in asimilar way to that of the temperature. Compared with the first cycle, the stress–strain loops changed little in the lowfrequency range (see the typical curves at 0.0007 Hz in Fig. 4), drifted down in the intermediate frequency range (see thetypical curves at 0.04 Hz in Fig. 5) and drifted up significantly in the high frequency range (see the curves at 1 Hz in Fig. 6).The difference in the maximum stresses between the first cycle and the steady-state cycle Δstransientmax ð ¼ ssmax�s1stmaxÞ for allfrequencies are marked in Fig. 8 and summarized in Fig. 9 for comparison with the temperature change. It can be seen that,with the increase in frequency, the values of Δstransientmax , ΔTtransient
max and ΔTtransientmean changed non-monotonically from the
negatives in the low and intermediate frequency range to the positives in the high frequency range. In addition to theextremely low frequency where it is isothermal (a trivial case here), there exists a critical frequency of about 0.2 Hz (withthe deformation period tp ¼ 5 s) at which , ΔTtransient
max and ΔTtransientmean are zero and for which there is no transient stage in the
temperature and stress–strain profiles. The roles of the two time scales (loading time and heat transfer time) in thefrequency-dependent temperature and stress oscillations will be discussed in Section 4.
3.2. Temperature and stress variations in the steady-state stage
In the steady-state stage, neither the temperature nor the stress–strain variations changed with the number of cyclesduring the cyclic phase transition. The temperature simply oscillated with a constant amplitude ΔTsð ¼ Ts
max�TsminÞ around a
mean temperature plateau (Tsmean), making it easily quantified by the superposition of these two parts. The stress oscillation
can be characterized by the maximum stress smax since the minimum strain was selected to make the minimum stressapproximately zero. The existence of the steady-state is indicative of the fact that the total heat generated in a cycle insidethe specimen is equal to the heat transferred to the ambient (Section 4 provides a detailed analysis).
The variation of the steady-state mean temperature Tsmean (i.e. the value of the plateau) with the frequency is shown in
Fig. 10(a), where Tsmean increases monotonically with the frequency. In particular, Ts
mean increases more rapidly in the highfrequency range because of the high rate of hysteresis heat accumulation at those frequencies. The amplitude oftemperature oscillation in the steady-state also increases monotonically with the frequency as shown in Fig. 10(b), but itbecame saturated (around 23 1C) in the high frequency range. The oscillation comes from the release and absorption of thesame amount of latent heat (l0¼7.74�107 J/m3) so the amplitude of the oscillation in the high frequency (near adiabatic

0 50 100 150 20020
30
40
50
60
70
Tem
per
ature
T (
oC
)
Time t (s)
halfstmean
smean
transientmean
stmax
smax
transientmax
stmax
smax
transientmax TTTTTT −−=Δ−=Δ−=Δ 111 ,,σσσ
max1stσ s
maxσmaxT
T
1st
smaxThalfst
mean−1
smeanT
stmaxT
T
1
smaxT
halfstmean
−1
smeanT
0.02Hz
0.4Hz stmax1σ
smaxσ
0
50
100
150
200 Change of the maximum stress Δσ transient
max
Chan
ge
of
the
max
imu
m t
emper
atu
re Δ
Τ tr
ansi
ent
max
Chan
ge
of
the
mea
n t
emper
ature
ΔΤ
tran
sien
tm
ean
(oC
)
Chan
ge
of
the
max
imum
str
ess
Δσ tr
ansi
ent
max
(MP
a)
Frequency f (Hz)
10-3 10
-2 10
-1 1
-20
-10
0
10
20
30
Change of the maximum temperature ΔΤ transientmax
Change of the mean temperature ΔΤ transientmean
0 20 40 60 800
200
400
600
Cycles n
No
min
al S
tres
s σ
(MP
a)
10
20
30
40
50
Tem
per
ature
T (
oC
)
Cycles n0 2 4 6 8 10 0 2 4 6 8 10
0
200
400
600
Cycles n
No
min
al S
tres
s σ
(MP
a)
Fig. 9. (a) The definitions of the measured change of the maximum stress Δstransientmax , the change of the maximum temperature ΔTtransientmax and the change of
the mean temperature ΔTtransientmean in the transient stage and (b) the non-monotonic frequency dependence of Δstransientmax , ΔTtransient
max and ΔTtransientmean .
H. Yin et al. / J. Mech. Phys. Solids 67 (2014) 100–128112
condition) became constant. The maximum and the minimum temperatures in the steady-state cycle (Tsmax and Ts
min) areplotted in Fig. 10(c). It is seen that Ts
max (due to the forward transformation) increases monotonically with the frequencywhile Ts
min (due to the reverse transformation) varies non-monotonically with the frequency. This type of non-monotonicity

20
30
40
50
60
70
Mea
n t
emper
ature
Ts m
ean (
oC
)
Frequency f (Hz)
Model (Eq. 10a)
Experiment
10-3 10-2 10-1 1
Frequency f (Hz)
10-3 10-2 10-1 1
Frequency f (Hz)
10-3 10-2 10-1 1
5
10
15
20
25
30
Tem
per
ature
osc
illa
tion a
mpli
tude
ΔTs (o
C)
Model (Eq. 10b)
Experiment
20
40
60
80
Tem
per
ature
T (o
C)
Model T smax (Eq. 10c)
Model T smin (Eq. 10d)
Experiment T smax
Experiment T smin
Fig. 10. Experimental results of the frequency dependence of temperature variation in the steady-state cycles: (a) the mean temperature Tsmean , (b) the
temperature oscillation amplitude ΔTs and (c) the maximum temperature Tsmax and the minimum temperature Ts
min . The modeling results from Section 4are also plotted for comparison.
H. Yin et al. / J. Mech. Phys. Solids 67 (2014) 100–128 113

400
450
500
550
600
650
10-4 10
-3 10
-2 10
-1 1
Steady-state maximum stress σ smax
Ste
ady-s
tate
max
imum
tem
per
ature
Τs m
ax (
oC
)
Ste
ady-s
tate
max
imum
str
ess
σ s max
(M
Pa)
Frequency f (Hz)
20
30
40
50
60
70 Steady-state maximum temperature Τ s
max
0 10 20 30 40 50400
450
500
550
600
650
Linear fit of the experiment results:
σ smax=403.6+4.5 (T s
max-T0 )
Ste
ady-s
tate
max
imum
str
ess
σ s max
(M
Pa) Experiment results: Steady-state maximum stress σ s
max
and Steady-state maximum temperature T smax
T smax-T0 (
oC)
0 10 20 30 40 50
100
200
300
400
500
600
700
0 1 2 3 4 50
200
400
600
Str
ess
σ (M
Pa)
Strain ε (%)
σr=123.17+krΔT
Forward transformation plateau stress σf
Reverse transformation plateau stress σr
Linear fit of forward transformation
Linear fit of reverse transformation
Nom
inal
str
ess
σ (M
Pa)
Temperature increase ΔT (oC)
σf=278.92+kfΔT
Fig. 11. (a) Variation of the steady-state maximum temperature and the steady-state maximum stress with the frequency, (b) the correlation between thesteady-state maximum stress and the steady-state maximum temperature, (c) the temperature dependence of the isothermal forward and reversetransformation plateau stresses (with the coefficients kf¼6.56 MPa/oC and kr¼7.09 MPa/oC respectively).
H. Yin et al. / J. Mech. Phys. Solids 67 (2014) 100–128114
in Tsmin is similar to that found in a single loading–unloading cycle under different constant strain rates and can be explained
and captured by the model prediction in the work of He and Sun (2010a, 2011).Due to the monotonic increase of Ts
max with the frequency, the maximum stress ssmax in the steady-state stress–straincurve also increased monotonically with the frequency as shown in Fig. 11(a). The correlation between ssmax and Ts
max, shownin Fig. 11(b), indicates a linear relationship with a proportional coefficient of 4.5 MPa/oC which is lower than the measuredtemperature coefficient kf (¼6.56 MPa/oC) of the isothermal plateau stress shown in Fig. 11(c). We have to emphasize that,since the real phase transition in loading is a rather complicated process involving strong non-isothermal and non-homogeneous temperature distribution, we can only roughly estimate the stress oscillation from the temperature oscillation

0
2
4
6
8
10
Isothermal value of D0
Model predictions of Ds: Eq. (14b)
Experiment data of Ds
Hyst
eres
is l
oop a
rea
D (1
06J/
m3)
10-4 10-3 10-2 10-1 1
Frequency f (Hz)
Fig. 12. Comparison between the model prediction and the experimental data on the frequency dependence of the steady-state hysteresis loop area Ds.
H. Yin et al. / J. Mech. Phys. Solids 67 (2014) 100–128 115
data based on such correlation. In the present experiment, a cyclic transformation at the frequency of 1 Hz in roomtemperature (¼25 1C) stagnant air can raise the specimen's temperature to 72.5 1C and the stress up to 611 MPa (see Fig. 6).Although large increase in the stress due to the latent heat at relatively adiabatic loading rates was reported by others, nosystematic measurement and analysis of this kind of large increase in the stress due to the transformation hysteresis heatand the latent heat has been performed before.
Fig. 12 shows the non-monotonic frequency dependence of the measured hysteresis loop areas of the steady-state cycle(Ds). It is seen that Ds first increased from the isothermal value of 6.61�106 J/m3 to the peak value 7.99�106 J/m3 (at0.002 Hz) then decreased to 3.61�106 J/m3 (at 1 Hz). Ds represents the mechanical energy dissipation per unit volume persteady-state cycle and it is an important parameter for SMA damping applications, e.g., seismic dampers. It is also animportant factor governing the mean temperature of the steady-state cycle (Ts
mean). Such non-monotonic variation of Ds withthe frequency will be analyzed and discussed in Section 4.
Finally, it must be emphasized that after each cyclic experiment of the trained specimen, the residual strain was checkedand found to be ignorable. We reloaded the specimen at a low strain rate for one cycle after each test and found thespecimen's stress–strain curves to be almost the same (Fig. 3(c)), which means that the microstructure change can beignored after these cyclic tests. This confirmed the pre-assumption that the thermo-mechanical response observed in theabove cyclic deformation is dominated by the second mechanism (thermal effect) and we can basically exclude the effect ofplasticity/dislocation and residual martensite on the observed phenomena in this section. (Remark: In general there shouldbe no exclusive operation between the first and the second mechanisms in the cyclic phase transition. They both canproduce the transient and steady-state responses during the cyclic deformation. Here, in order to clearly differentiate thecontributions from the two different mechanisms, we purposely trained the specimen to remove the major effects ofdislocation/plasticity and residual martensite so as to clearly illustrate the pure thermal effect from the second mechanism).
To end this section, we summarize the key observations on the thermomechanical responses of the NiTi rods under cyclicphase transition as follows:
(1)
Under cyclic deformation both temperature and stress vary in the form of periodic oscillations which experiencetransient stages before reaching their steady-states (thermal shake down). The time ttransient (¼(Ntransient)/f) required toreach the steady-state cycle appears proportional to the lumped convection time tsh by a factor of 3 (see Fig. 13). Thetrend and the magnitude of the temperature variation in the transient stage strongly depends on the frequency (Fig. 7):both the mean temperature and the maximum temperature of a cycle decrease at relatively low frequency and increaseat high frequency with the cycle number in the transient stage. The mean temperature variation in the transient stagevanishes at the critical frequency of about 0.2 Hz (see Figs. 7, 9 and 14).(2)
Following the transient stage is the stage of steady-state oscillation where the temperature oscillates around a meantemperature plateau for each given frequency (Fig. 7). The oscillation is mainly attributed to the release/absorption of thelatent heat and the amplitude of the oscillation increases with the loading frequency and eventually becomes saturated atthe high frequency range (near the adiabatic condition, see Fig. 10(b)). The value of the steady-state mean temperatureincreases monotonically with the frequency (Fig. 10(a)). Such increase is attributed to the accumulation of the hysteresisheat (steady-state stress–strain loop area). It is observed that the higher the frequency, the higher the mean temperatureplateau. The steady-state mean temperature plateau at a given frequency reflects the balance between the heat supplyrate and the heat transfer rate, which is determined by the loading frequency (setting the time scale of heat release), thecharacteristic hysteresis heat, heat capacity and the convective heat transfer property of the ambient.
0.0
0
50
100
150
200 ths
ttransient
3.2 ths
Tim
e t (
s)
Frequency f (Hz)
0.2 0.4 0.6 0.8 1.0
Fig. 13. Comparison among the frequency dependent lumped relaxation time tsh , the time needed to reach steady-state (ttransient), and 3.2tsh .
-10
0
10
20
30
f expcritical f model
critical
Experiment fcritical =0.16Hzexp
Model prediction fcritical =0.23Hzmodel
Experiment ΔTmean
transient
transient
Model predictions ΔTmean : Eq.(6)
Mea
n t
emper
ature
chan
ge
ΔT
tran
sien
tm
ean
(°C
)
10-3 10-2 10-1 1
Frequency f (Hz)
Fig. 14. Comparison between the experimental results and model predictions (Eq.(6)) of the mean temperature change ΔTtransientmean in the transient stage.
The measured critical frequency (f expcritical) and the predicted critical frequency (f modelcritical) are also shown for comparison.
H. Yin et al. / J. Mech. Phys. Solids 67 (2014) 100–128116
(3)
Under cyclic deformation, the stress–strain curve varied at the same pace as the temperature because of the intrinsictemperature dependence of the stress (Claperyon–Clausius relation). The stress–strain response also experiencedtransient stage where the stress–strain curve gradually drifts downward or upward with the number of cycles before itreaches the steady-state hysteresis loop (Figs. 8 and 9). As summarized in Fig. 9, the frequency dependence of stressfollows the same trend as that of the temperature. Also, the maximum stress and the maximum temperature in thesteady-state correlated linearly. There is significant increase in the stress due to the transformation heat (hysteresis heatplus latent heat). It is believed that such heat effect, which is ignored in most of the fatigue and cyclic phase transition ofNiTi, will be an important factor in determining the cyclic response of the material and will lead to the acceleration ofdegradation and fatigue failure of the material under high frequency loading conditions.4. Analysis and discussion
To have a deep understanding of the above observed phenomena, especially to quantify the roles of the time scale of heatrelease and the time scale of the heat transfer in the observed material behavior, we need to analyze both transient andsteady-state responses to identify the governing parameters. It is important to note that, as shown in Fig. 1, in the transientstage, the stress–strain loop (N.B. its area represents the mechanically dissipated heat (heat source D)) and the temperaturevariation in a cycle are coupled to each other and keep changing until the steady-state is reached. The lumped heat transferequation (Eq. (A10) in Appendix A) for the temperature history will be a nonlinear ordinary differential equation since boththe lumped convection coefficient h and the hysteresis heat D are not constants and depend on the frequency and numberof cycles. Instead of solving this complex nonlinear equation, we adopt simplified assumptions for h and D in the following

H. Yin et al. / J. Mech. Phys. Solids 67 (2014) 100–128 117
(also see Appendix A) and aim to capture the key quantitative features of the transient and the steady-state temperaturevariations under different frequencies in the ambient static air.
Consider a NiTi SMA rod specimen of radius R and gauge length L0 under displacement-controlled sinusoidal cyclicdeformation of frequency f (the period tp ¼ 1=f ). The specimen's end displacement u(t), nominal strain εðtÞ and strain rate_εðtÞ for tA ½0;1� are respectively:
uðtÞ ¼ u0
2ð1� cos ωtÞ ð1Þ
εðtÞ ¼ u0
2L0ð1� cos ωtÞ ð2Þ
_εðtÞ ¼ u0ω
2L0sin ðωtÞ ð3Þ
where u0 is the maximum end-displacement and ω is the angular frequency (ω¼2πf). By using the lumped-analysis method(Cotta and Mikhailov, 1997) and certain simplifying assumptions (see Appendix A), we derived the following heat transfergoverning equation for the rod specimen's volume-averaged temperature T(t) as
λdTðtÞdt
¼ � 2hR
ðTðtÞ�T0Þþl0ω2
sin ðωtÞþ Dωπ
sin 2ðωtÞ ð4Þ
where λ is the heat capacity per unit volume, h is the lumped convective coefficient of the rod (including convection andconduction). The first term of the right-hand side of Eq. (4) represents the lumped heat convection while the second andthird terms represent the rate of the latent heat release and the hysteresis heat release, respectively. The rates of the twoheat sources are approximated in different sinusoidal forms (see Appendix A for details). For each given loading frequency,both h and D depend on the specimen's temperature history and therefore are not constants in the transient stage. For thepurpose of simplicity and as a first approximation, h and D can take their respective steady-state values (i.e. let h¼hs andD¼Ds at a given loading frequency f) in Eq. (4). Then Eq. (4) can be easily solved as a linear ODE with the initial conditionTðtÞ
��t ¼ 0 ¼ T0 to give the expression of TðtÞ as
TðtÞ ¼ T0þDstshω2πλ
þ l0tsh2ω2
2λð1þtsh2ω2Þ
� 2Dstsh3ω3
πλð1þ4tsh2ω2Þ
0@
1Ae� t=t
sh þ l0tshω
2λffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1þtsh
2ω2
q sin ωt� cos �1 1ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1þtsh
2ω2
q0B@
1CA
264
� Dstshω
2πλffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1þ4tsh
2ω2
q sin 2ωtþ sin �1 1ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1þ4tsh
2ω2
q0B@
1CA375 ð5aÞ
where tsh ¼ λR=2hs is the characteristic lumped convection time in the steady-state (see Fig. 3(a)) or the relaxation time(Holman, 2009; He et al., 2010). Eq. (5a) can be expressed as
TðtÞ ¼ T0þAþB e� t=tsh þC sin ðωt�α1Þ�E sin ð2ωtþα2Þ ð5bÞwhere A, B, C, E, α1, and α2, as shown below, are combinations of the internal and external governing parameters whichcharacterize the material properties, the ambient and the loading:
A¼ Dstshω2πλ ¼ Dstsh f
λ ¼ Dstshλtp
¼ Ds
λtp
B¼ l0tsh2ω2
2λð1þ tsh2ω2Þ
� 2Dstsh3ω3
πλð1þ4tsh2ω2Þ
� �¼ l0
2λð1þðtp 2=4π2ÞÞ
� 4Ds
λtp ððtp 2=4π2Þþ4Þ
C ¼ l0tshω
2λ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1þ tsh
2ω2
q ¼ l0
2λffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1þðtp 2
=4π2Þp
E¼ Dstshω
2πλ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1þ4tsh
2ω2
q ¼ Ds
2πλffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi4þðtp 2
=4π2Þp
α1 ¼ cos �1 1ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1þ tsh
2ω2
q ¼ cos �1 1ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1þð4π2=tp 2Þ
pα2 ¼ sin �1 1ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
1þ4tsh2ω2
q ¼ sin �1 1ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1þð16π2=tp 2Þ
p
8>>>>>>>>>>>>>>>>>>>>>>>>><>>>>>>>>>>>>>>>>>>>>>>>>>:
In the above, the loading period tp has been normalized by the characteristic lumped convection time tsh (i.e. tp ¼ tp=tsh ).Since l0cD for most NiTi polycrystals (He and Sun, 2010a), we have CcE and the last term of Eq. (5b) can be ignored. Sothe temperature evolution T(t) (or the temperature difference ΔTðtÞð ¼ TðtÞ�T0Þ) is mainly governed by three terms:
TðtÞ ¼ T0þAþB e� t=tsh þC sin ðωt�α1Þ ð5cÞ

H. Yin et al. / J. Mech. Phys. Solids 67 (2014) 100–128118
Eq. (5c) can be considered as the superposition of the mean temperature evolution TmeanðtÞ and the temperatureoscillation ToscillationðtÞ:
TðtÞ ¼ T0þAþB ee� t=ts
h þC sin ðωt�α1Þ ¼ TmeanðtÞþToscillationðtÞ;
where
TmeanðtÞ ¼ T0þAþBe� t=tsh
ToscillationðtÞ ¼ C sin ðωt�α1Þ
(ð5dÞ
It is noted that the term B e� t=tsh characterizes the mean temperature change in the transient stage (Fig. 14), AþT0 is thesteady-state mean temperature and C is the amplitude of oscillation (Fig. 10). In the following, we discuss in detail thesolutions for the transient and steady-state stages and compare the solutions with the experimental data.
4.1. Predictions of temperature variation in the transient stage
To understand the measured temperature change ΔTtransientmean in the transient stage as shown in Fig. 9, we examine the
following theoretical predictions of Eq. (5d):
ΔTtransientmean � ðTmeanÞt-1�ðTmeanÞt ¼ 0 ¼ B e�1=tsh �e�0=tsh
h i¼ �B
¼ � l02λð1þðtp2=4π2ÞÞ
� 4Ds
λUtp Uððtp2=4π2Þþ4Þ
" #¼ l0
2λ
� �4π2f 2 Utsh
2
ð4π2f 2 Utsh2þ1Þ
8Ds
l0
� �f Utsh U ð4π2f 2 Utsh
2þ1Þð16π2f 2 Utsh
2þ1Þ�1
24
35
ð6Þ
It shows that ΔTtransientmean originates from the latent heat l0 and the hysteresis heat Ds. The two heat sources have opposite
effects on ΔTtransientmean and the sign of ΔTtransient
mean is frequency dependent through the term (tP or f Utsh ). The opposite effects of l0and Ds on ΔTtransient
mean can be explained as follow: when considering only the effect of the hysteresis heat Ds (assuming l0¼0 inEq. (5a)), we see that the temperature at the end of the 1st loading cycle will be higher than the start temperature of thecycle (i.e. T1st
End4T1stStart), except the isothermal case where tp-1 (tshω-0) and T1st
End¼T1stStart . Since T1st
End is also the starttemperature of the 2nd cycle (i.e. T2st
Start¼T1stEnd), similarly we have T1st
StartrT2ndStartrT3rd
Startr⋯ until steady-state cycles. Thatmeans the hysteresis heat of each cycle raises the temperature of the specimen so that ΔTtransient
mean Z0 (see Eq. (6), the equalsign applies to the isothermal case). In contrast, when there is only the latent heat l0 (assuming Ds¼0), it is easy to see fromEq. (5a) that T1st
EndoT1stStart , which can also be easily observed in many experiments of NiTi under one loading–unloading cycle:
for example in a strip under a loading–unloading cycle of strain rate 3.3�10�3/s (see Figs. 3 and 4 of the paper by Zhanget al., 2010), the cycle-end temperature was 14 1C, which is much lower than the cycle-start temperature (roomtemperature), and a layer of moisture on the specimen's surface was clearly observed at the end of the cycle! The reasonis that the released latent heat of the forward transformation is partly transferred out to the environment during the loadingand the beginning of unloading (there is a stage of martensite elastic unloading before the reverse phase transformation);then, during reverse phase transformation, the latent heat absorption surely makes the temperature to be lower than theinitial temperature (where the effect of latent heat l0 is dominant over that of the hysteresis heat Ds for the intermediatestrain rates). With the similar latent heat release/absorption and heat-transfer processes, the temperature would driftdownward in the following cycles T1st
start4T1stEnd ¼ T2nd
start4T2ndEnd ¼ T3rd
start4⋯. Therefore, the effect of latent heat l0 leads toΔTtransient
mean r0 (see Eq. (6)), which is opposite to the hysteresis-heat effect.Using typical values of the tested NiTi material (l0, λ in Table 1, th in Fig. 3(a) and the hysteresis heat Ds in Fig. 12), the
predicted frequency dependence of ΔTtransientmean is shown in Fig. 14. It is seen that, depending on the frequency, the predicted
ΔTtransientmean can be positive and negative and varies non-monotonically with the frequency. The predictions agree well with
the experimental data. Theoretically, there are two frequencies for which ΔTtransientmean ¼ 0 (i.e. B¼0). The first is a trivial case
where f¼0 Hz (i.e. tp-1) since the effects of the heat sources on the temperature vanish. The second case of ΔTtransientmean ¼ 0
at f¼0.23 Hz is of particular interest where the effects of latent heat and hysteresis heat cancel each other (see Eq. (6)),which was experimentally observed at a frequency around f¼0.2 Hz. For these two cases (with ΔTtransient
mean ¼ 0), there is notransient stage, i.e., the temperature variation and the stress–strain loops of all cycles coincide (see the experimental data off¼0.1 Hz and f¼0.2 Hz in Figs. 7 and 8).
For all other frequencies (fa0 Hz and fa0.23 Hz), there always exists transient stages before the steady-states arereached. For each of these frequencies, the time (ttransient) required to reach the steady-state can be roughly estimated by the

H. Yin et al. / J. Mech. Phys. Solids 67 (2014) 100–128 119
following truncation:
ðTmeanÞt ¼ ttransient �ðTmeanÞt-1ðTmeanÞt ¼ 0�ðTmeanÞt-1
¼ e� ttransient=tsh
e�0=tsh¼ 4% ) ttransient ¼ tsh ln
14%
� �¼ 3:2tsh ð7Þ
That means, approximately, it takes about 3 times of the characteristic heat convection time tsh to reach the steady-state.The experimentally observed ttransient versus the frequency is shown in Fig. 13 where the measured tsh versus the frequency isalso plotted for comparison. It is seen that, for high frequencies (f40.1 Hz), tsh is of the order of E30 s and ttransient is of theorder of E100 s which is indeed around 3 times of tsh . The number of cycles to reach the steady-state can be approximatedas a linear function of frequency:
Ntransient ¼ttransient
tp� 3:2Utsh=tp ¼ 3:2Utsh f ð8Þ
In other words, the higher the frequency, the more cycles (Ntransient) are needed to reach the steady state. This is alsosupported by the experimental data.
4.2. Predictions of temperature variation in steady-state cycles
When t-1, Be� t=tsh-0. Eq. (5c) gives the temperature variation in the steady-state as
TðtÞ ¼ T0þAþC sin ðωt�α1Þ ð9ÞWith the above steady-state solution, the steady-state mean temperature Ts
mean, temperature oscillation amplitude ΔTs,maximum temperature Ts
max and minimum temperature Tsmin can be predicted as
Tsmean ¼ T0þA¼ T0þ
Ds
λUtpð10aÞ
ΔTs ¼ 2C ¼ l0
λffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1þðtp2=4π2Þ
q ð10bÞ
Tsmax ¼ Ts
meanþΔTs
2¼ T0þAþC ¼ T0þ
Ds
λUtpþ l0
2λffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1þðtp2=4π2Þ
q ð10cÞ
Tsmin ¼ Ts
mean�ΔTs
2¼ T0þA�C ¼ T0þ
Ds
λUtp� l0
2λffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1þðtp2=4π2Þ
q ð10dÞ
These theoretical predictions clearly show that the steady-state mean temperature Tsmean (i.e. the temperature plateaus
shown in Fig. 7) is governed by the hysteresis heat Ds and tp (see Eq. (10a)), while the temperature oscillation amplitude ΔTs
is governed by the latent heat l0 and tp (Eq. (10b)). As shown in Fig. 10, these theoretical predictions agree well with theexperimental data without any fitting parameters. It is seen that Ts
mean, ΔTs and Ts
max all increase monotonically with theloading frequency f (decreasing tp ). The main difference is that, at high frequency (tp-0), Ts
mean and Tsmax increase
significantly while ΔTs approaches a saturated value:
ΔTs� tp-0 ¼
l0λ
ð11Þ
It is also noted that Tsmin has non-monontonic frequency dependence. This is caused by the opposite effects of the latent
heat and hysteresis heat on Tsmin: during unloading (reverse transformation) latent heat leads to cooling while hysteresis
heat leads to heating (see Eq. (10d)). A similar prediction on Tsmin was also obtained by He and Sun (2010a, 2011) using a five-
stage piece-wise linear stress–strain curve of the material.The reason why the experimental results of steady-state temperature oscillation are less than the model prediction in the
intermediate frequency range (0.007–0.07 Hz in Fig. 10(b)) is because at that frequency range, the transformed martensitecannot be totally transformed back to austenite after unloading due to cooling. As shown in Fig. 15, in the intermediatefrequency range, the specimen's average temperature during steady-state cyclic loading can be as low as 16.8 1C which isless than the austenite finish temperature (Af¼17.1 1C). So, part of the martensite cannot be transformed back to Austenite,which is evidenced by the stress–strain responses in Fig. 15 where when the nominal strain goes back to 0, the nominalstress is less than the preload (or when the nominal stress is reduced to the preload, the strain is still not zero), indicatingthat residual martensite exists in the specimen. Since the amount of phase transformation becomes less, the released and

0 5 10 15 20 25
20
40
60
80
Tem
per
ature
T (
C)
Cycles n0 3 6 9 12 15
20
40
60
80
Cycles n
Tem
per
atu
re T
(C
)
0 3 6 9
20
40
60
80
Cycles n
Tem
per
atu
re T
(C
)
CT osmax 0.37=
0.04Hz0.02Hz0.01Hz
CT osmax 9.37= CT os
max 3.40=
CT osmean 9.26= CT os
mean 5.27= CT osmean 9.28=
CT os 2.20=Δ CT os 9.20=Δ CT os 7.22=Δ
0.04Hz0.02Hz0.01Hz
0 2 4 60
200
400
600
Nom
inal
Str
ess
σ (M
Pa)
Nominal Strain ε (%)
0 2 4 60
200
400
600
No
min
al S
tres
s σ
(MP
a)
Nominal Strain ε (%)
0 2 4 60
200
400
600
Nom
inal
Str
ess
σ (M
Pa)
Nominal Strain ε (%)
Fig. 15. The variations of the specimen's average temperature and the stress–strain responses at 0.01 Hz, 0.02 Hz and 0.04 Hz cyclic phase transition.
H. Yin et al. / J. Mech. Phys. Solids 67 (2014) 100–128120
absorbed latent heat becomes less accordingly, the temperature oscillation becomes less than the model prediction (whichassumes the latent heat release is constant).
The above discussion about the steady-state cycles implies that a superelastic SMA component under cyclic loadingusually works at temperatures which are quite different from the ambient temperature. Particularly at high frequency, theworking temperature of the SMA material can be very high due to the rapid accumulation of hysteresis heat (e.g.Tmax¼72.4 1C for 1 Hz for the current tests), which will lead to a very high working stress of the material underdisplacement-controlled cyclic deformation. Finally, comparisons between the model prediction and the experiments of thewhole temperature history for the three typical frequencies are shown in Fig. 16. It is seen that the predictions agree wellwith the experiments without any fitting parameters.
4.3. Frequency dependence of hysteresis loop area and stress responses
Using the solution of the temperature evolution (Eq. (5a)) and the Clausius–Claperyon relationship, we can approximatethe stress variation with time as
sðTðtÞÞ ¼ s0ðT0ÞþΔsðΔTðtÞÞ ð12ÞThen the hysteresis loop area Dn (i.e. the mechanical energy dissipation per unit volume of the nth cycle) can be obtained
by integrating the stress in Eq. (12) over the strain for the nth cycle:
Dn ¼ ∮ ðs0ðT0ÞþΔsðΔTÞÞdε¼ ∮s0ðT0Þdεþ∮ΔsðΔTÞdε
¼D0þεmaxω
2
Z 2nπ�πð Þ=ω
2π=ωð Þðn�1ÞðkfΔTÞ sin ωt dtþ εmaxω
2
Z 2nπ=ω
2nπ�πð Þ=ωðkrΔTÞ sin ωt dt ð13Þ
The hysteresis loop area Ds in the steady-state cycle can be easily obtained using the steady-state temperature, thenEq. (13) gives
Ds ¼D0þðkf �krÞεmaxDstshω
2πλþðkf þkrÞ
εmaxπl0tshω
8λð1þtsh2ω2Þ
ð14aÞ
where kf and kr are the temperature coefficients for forward and reverse transformation plateau stresses respectively.Eq. (14a) shows that Ds consists of three terms. The first term is the isothermal contribution D0 which is a constant.
The second term represents the contribution by the mean temperature change due to the hysteresis heat Ds. Since kf okr ,this term monotonically decreases with the frequency. The third term represents the non-isothermal contribution whichoriginates mainly from the stress variation due to the temperature oscillation controlled by l0. We can easily see that thisterm changes non-monotonically with the frequency, and reaches a peak at tsh Uω¼ 1. From Eq. (14a) we obtain Ds as
Ds ¼D0þðkf þkrÞðεmaxπl0tshω=8λð1þtsh
2ω2ÞÞ
1�ðkf �krÞðεmaxtshω=2πλÞð14bÞ
The predicted values of Ds for cyclic loading at different frequencies are shown in Fig. 12 for comparison with theexperimental data. It is seen that the measured Ds first increased from 6.61�106 J/m3 (at near isothermal case) up to thepeak value 7.99�106 J/m3 at 0.002 Hz, then decreases to 3.61�106 J/m3 (at 1 Hz). Although the prediction (predicted peakvalue is 9.48 �106 J/m3) is about 15% higher than the experimental data, the qualitative feature of the non-monotonicvariation with frequency is well captured by the prediction (Eq. (14b)). There are two primary sources which cause the 15%

0
15
30
45
60
Experimental results
Model prediction: Eq.(5a)
Mean temperature prediction
Tem
per
ature
T (
oC
)T
emper
ature
T (
oC
)
Tem
per
ature
T (
oC
)
0
15
30
45
60
Experimental results
Model prediction: Eq.(5a)
Mean temperature prediction
0.004Hz
0.04Hz
0.4Hz
0
15
30
45
60
Experimental results
Model prediction: Eq.(5a)
Mean temperature prediction
Cycle number n
Cycle number n
Cycle number n
1 2 3 4 5
3 6 9 12 15
20 40 60 80
Fig. 16. Comparison between the experimental results and the model predictions of the temperature variations for cyclic deformation at (a) 0.004 Hz,(b) 0.04 Hz and (c) 0.4 Hz.
H. Yin et al. / J. Mech. Phys. Solids 67 (2014) 100–128 121
discrepancy: The first one is the approximation of the heat sources in evaluating the temperature variation. In Eq. (A7) of theAppendix A, we assume that the rate of latent heat release is proportional to the strain rate, while the hysteresis heat releaserate is proportional to the square of the strain rate. These two assumptions are only correct in the lumped sense, i.e. the total

H. Yin et al. / J. Mech. Phys. Solids 67 (2014) 100–128122
heat release/absorption are correct (see the discussion in the paragraph above the Eq. (A7)). Nevertheless, it is obvious thatduring the elastic deformation of austenite and martensite phases, there is no release of latent heat and hysteresis heat. Thisassumption causes error in the prediction of the temperature. The second source of error in the theoretical model is theapplication of the Clausius–Clapeyron relation (i.e. the temperature dependence of the transformation stresses) to the wholestrain range of the loading–unloading cycle to estimate the hysteresis loop D (see Eq. (13)). In fact, the cycle includes elasticloading/unloading of Austenite, elastic loading/unloading of Martensite, A-M forward transformation region and M-A reversetransformation region. The Clausius–Clapeyron relation describing the temperature dependence of phase-transformationstresses is only valid for the A-M and M-A regions where martensite and austenite phases co-exist, it is not valid for thetwo regions of the pure elastic deformation of austenite and martensite. That means, in these two elastic regions, even there aretemperature variations, the stress variation does not follow the Clausius–Clapeyron relation and has little contribution to thehysteresis loop. Therefore, by using the Clausius–Clapeyron relation in the whole strain range of the loading–unloading cycle (i.e.phase transition regions plus elastic regions), we overestimated the temperature effect on the hysteresis loop area and thereforecausing the discrepancy between prediction and measurement.
Remark: kf okr is generally true for most of superelastic NiTi SMAs tested without plastic deformation (see data in Fig. 11(c) and Shaw and Kyriakides, 1995, 1997). Moreover, Liu et al. (2008) explained this relation by thermodynamic analysis withthe fact that the transformation strain of the reverse transformation is smaller than that of the forward transformation(because ds=dT
��f orward�transition ¼ ðρ ΔS=εtrjf orward�transitionÞ; ds=dT
��reverse�transition ¼ ðρ ΔS=εtr jreverse�transitionÞ). Therefore, we
adopt this relation kf okr in discussing Eq. (14a) which captures the experimental observation that Ds decreases withincreasing frequency in the high frequency range (Fig. 12). If we use the relationship of kf4kr which so far has neither beenobserved experimentally nor proved theoretically, the results would be qualitatively different: Ds would increase withincreasing frequency in the high frequency range (see Eq. (14a) where the third term approaches a constant), which is notconsistent with the experimental observation.
The significant frequency dependence of the cyclic stress response can be clearly seen from the s–ε curves in Figs. 4–6.For 1 Hz loading, the maximum stress ssmax reached 611.22 MPa (see Fig. 8) and maximum temperature reachedTsmax¼72.4 1C (see Fig. 7). We can imagine that both ssmax and Ts
max would further increase if the loading frequency goesbeyond 1 Hz. The significant increase in ssmax is due to the significant increase in the mean temperature plateau Ts
mean asshown in Fig. 6. So far, the maximum stress in our cyclic tests has been kept below the material's plastic yielding stress ofabout 1000 MPa (see Qian et al., 2004, 2006). Here we mean two kinds of “plasticity” under external loading. One is thematerial's macroscopic overall plastic flow stress which, for the NiTi used in the paper, is typically about 900–1000 MP asmeasured in uniaxial tensile tests (Qian et al., 2006). The other is the microscale, discrete and local plasticity such asdislocation accumulation at the grain boundary. Such micro-plasticity events take place usually at applied stress level(�400 MPa in this manuscript during training) much lower than the macroscopic plastic yielding stress of the material, andis responsible for the observed cyclic training effect (or calledmicro-shakedown phenomena) in NiTi SMA. During the trainingprocess, the cyclic forward and reverse motion of the A–M interfaces inside a grain created dislocations that accumulate atthe grain boundaries, leading to the macroscopic irreversible residual strain of the order of less than 1%. It is expected that ata higher frequency (41 Hz) the first mechanism (microstructure degradation) would participate and interact with thesecond mechanism (thermal effect) in the cyclic deformation, which is very important but out of the scope of this paper.
5. Summary and conclusions
The thermomechanical responses of a superelastic NiTi SMA rod under displacement-controlled cyclic phase transition arerather complicated due to the microstructure degradation, temperature variation, heat transfer and the thermomechanicalcoupling. The cyclic stress–strain curves are non-isothermal and strongly influenced by the combination and interaction ofinternal and external governing parameters (internal parameters such as heat capacity, latent heat and isothermal hysteresisheat; and external parameters such as the training process, the imposed strain amplitude, deformation frequency, specimengeometry and the heat transfer condition of the ambient). The stress–strain relationship and the damping capacity are no longerpure intrinsic material properties. In this paper, to investigate the pure thermal effect on the cyclic phase transition behavior ofthe rod specimen, we have purposely removed the effect of the dislocation by training the specimen before the experiment. Bysynchronized measurements of the thermal and mechanical quantities, we systematically quantified the temperature, stress–strain and damping property of the material under displacement-controlled cyclic phase transition in the frequency range of0.0004–1 Hz. We have identified the latent and hysteresis heats as the two heat sources and examined the effects of the heatrelease rate and the heat transfer rate on both the temperature variation and the cyclic stress–strain behavior of the rod. Theexperimental data are discussed and analysed and are further compared with the predictions from the lumped heat transfermodeling analysis for better understanding. Both experiment and analysis show that, among the many internal and externalgoverning parameters, the deformation frequency, the heat source (latent and hysteresis heats), the heat transfer and thethermomechanical coupling have predominant effects in determining the temperature and the stress–strain response of the rodspecimen. The key conclusions of the paper are as follows:
�
The volume-averaged temperature as well as the stress–strain responses of the NiTi rod under cyclic phase transition ofeach frequency basically consist of two stages: the initial transient stage and the following steady-state stage. In the
H. Yin et al. / J. Mech. Phys. Solids 67 (2014) 100–128 123
transient stage, the competition between heat generation and heat transfer as well as the coupling between the thermaland mechanical quantities are reflected by the observed drifts of both the temperature variation and the stress–strainloop with the number of cycles. The drift in the stress–strain loop (drift up or down) follows the same trend as thetemperature. The magnitude of the drift varies with the frequency in a non-monotonic way. In the steady-state,the temperature of the specimen oscillates around a mean temperature plateau and the stress–strain curves collapseonto a single loop. The achievement of the steady-state or the stabilized response is indicative of the balance betweenthe heat generation and the heat transfer. It is the effect of heat (i.e. the resultant effect of the latent heat release/absorption, the hysteresis heat release and the heat transfer between the specimen and the ambient air) that leads to thestabilization of both the temperature and the stress–strain responses.
�
Both experimental data and analysis show that the oscillation of the specimen's temperature is mainly caused by thelatent heat release/absorption during the forward/reverse phase transition while the difference between the steady-statemean temperature (Tsmean) and the room temperature (Tsmean�T0 ¼Dstsh f =λ) is mainly caused by the accumulation of the
hysteresis heat in the cyclic phase transition. The steady-state temperature oscillation ΔTs increased with the frequencyand eventually reached the saturated value of l0=λ; while the steady-state mean temperature Ts
mean increasedmonotonically with the frequency due to the fast accumulation of the hysteresis heat. The variations of both ΔTs andTsmean with the frequency in the steady-state are determined by the ratio of the two time scales: the characteristic time tp
of the heat generation inside the material and the characteristic time tsh of heat transfer to the ambient. Theoreticalpredictions of both ΔTs and Ts
mean agree well with the experimental data without any fitting parameters.
� The stress in the cyclic loading strongly depends on the deformation frequency. The maximum stress (at the strain of 6%)in the stress–strain curve of the steady-state cycles increases monotonically with the frequency and can reach 611 MPa(400 MPa for the isothermal case) at the frequency of 1 Hz for the rod. The stress hysteresis loop area D (dampingcapacity of the material) is strongly coupled with the temperature variation in the cycle. D drifts with the number ofcycles until it reaches its steady-state value Ds. Both experiment and analysis show that Ds first increases then decreaseswith the frequency in a non-monotonic way. At the frequency of 1 Hz, Ds is about half of the isothermal value (D0). Thesemust be taken into account when using SMA as high-frequency damping devices.
�
The significant loading frequency dependence of the thermal and mechanical responses of the NiTi SMA materialreported in this paper strongly indicate that, in characterizing and modeling the stress–strain relationship of the SMAmaterials, one must clearly specify the time scale of loading and the time scale of the heat transfer between the specimenand the ambient. In addition to the factors such as the specimen geometry, the mean strain, the amplitude of the strainvariation and the ambient condition, etc., the hysteresis loop area (hysteresis heat) and deformation frequency playimportant roles in the material's thermomechanical responses and degradation through heat accumulation and heattransfer. More specifically, for a given ambient and specimen geometry, it is expected that the smaller the hysteresis ofthe material and the lower the frequency, the lower the temperature and the stress level and therefore the lower thematerial degradation will be.Acknowledgment
The authors are grateful for the financial support of this work from the Hong Kong Research Grant Council (RGC) throughGrant no. 619113, the Natural Science Foundation of China (Project no. 11128204) and the State Key Lab of Water Resourcesand Hydropower Engineering of WHU, China.
Appendix A. Governing equation and solution for the volume-averaged temperature T(t)
The method to build the governing equation for the volume-averaged temperature TðtÞ of the rod is basically from theheat transfer equation and lumped analysis (Cotta and Mikhailov, 1997). It is well known that, for a body of volume V and
Heat flow via conduction
Heat flow via convection
V
S
T(x, t) =V
dvtTV
tT ),()( x1
Fig. A1. Schematic diagram of the lumped analysis method for the transient heat transfer problem, from T(x, t) to the lumped temperature T(t).

H. Yin et al. / J. Mech. Phys. Solids 67 (2014) 100–128124
boundary surface S (Fig. A1), the differential heat transfer equation can be derived from the local energy balance at anyposition x, as
λ∂Tðx; tÞ
∂t¼∇ k∇Tðx; tÞþgðx; tÞ; ðA1Þ
where λð ¼ ρcÞ is the heat capacity per unit volume and k is the heat conductivity, g(x,t) is the heat source. Lumped systemanalysis can be applied to Eq. (A1) for the body under the condition of low temperature gradient and can yield a verysimplified expression of the volume-averaged temperature (for more details, please refer to Cotta and Mikhailov, 1997). Anoverall volume averaging of Eq. (A1) in region V not only defines the volume-averaged temperature TðtÞð ¼ ð1=VÞRVTðx; tÞdvÞwhich is a function of time only, but also turns Eq. (A1) as
λdTðtÞdt
¼ 1V
ZV∇ k∇Tðx; tÞdvþgðtÞ; xAV ; t40; ðA2Þ
where
gðtÞ ¼ 1V
ZVgðx; tÞdv: ðA3Þ
We consider a NiTi SMA rod of radius R and gauge length L0 under displacement-controlled sinusoidal cyclic deformationof frequency f (period tp¼1/f). The sinusoidal displacement u(t), strain εðtÞ and strain rate _εðtÞ are respectively:
uðtÞ ¼ u0
2ð1� cos ωtÞ; ðA4Þ
εðtÞ ¼ u0
2L0ð1� cos ωtÞ; ðA5Þ
_εðtÞ ¼ u0ω
2L0sin ωt; ðA6Þ
where u0 is the amplitude of the displacement and ω is the angular frequency (ω¼2πf). Now we derive the evolution of thespecimen's volume-averaged temperature T(t) by lumped system analysis. To simplify the case, we used the followingassumptions:
(1)
Latent heat release/absorption and hysteresis heat release are the two internal heat sources of the material and theirrates are approximated as being proportional to the applied strain rate and the square of the strain rate, respectively,without separating the loading–unloading process into different subsections (He and Sun, 2010a);(2)
The heat flow through the two grips are modeled as heat conduction through the two end cross-sections of the gauge(of length L0) which experiences cyclic phase transition as shown in Fig. A2.The volume-averaged heat source gðtÞð ¼ RVgðx; tÞdv) in Eq. (A2) includes the latent heat (the total amount per unitvolume is l0) and the hysteresis heat (D per unit volume). The latent heat comes from the phase transition and therefore therate of latent heat release can be assumed to be proportional to the phase transformation rate or strain rate (i.e. positive inloading and negative in unloading). By assumption (1), we can write the latent heat release rate as ðl0ω=2Þ sin ðωtÞ whichsatisfies the condition that the integral of the latent heat release rate in loading and unloading is l0 and –l0 respectively(i.e.
R tp=20 ðl0ω=2Þ sin ðωtÞdt ¼ � R tptp=2ðl0ω=2Þ sin ðωtÞdt ¼ l0). At the same time, the friction-type hysteresis heat is released and
its rate increases with the strain rate and is always positive in both loading and unloading. Therefore we simply assume the
Convectio
nC
onductio
n
Gag
e length
L0
Convectio
n
Conductio
n
L0 Two end
Cross -sections
+Electrical current
-
Fig. A2. (a) Heat transfer conditions in the real experimental and the model, and (b) the experimental setup for electric resistance heating.

H. Yin et al. / J. Mech. Phys. Solids 67 (2014) 100–128 125
hysteresis heat release rate is proportional to the square of the strain rate as ðDω=πÞ sin 2ðωtÞ. The assumption we made ismainly to simplify the model and to make sure that hysteresis heat release is always positive during loading and unloading.We also assure the total hysteresis heat released in one cycle is D, i.e.
R tp0 ðDω=πÞ sin 2ðωtÞdt ¼ R tp=2
0 ðDω=πÞsin 2ðωtÞdtþ R tptp=2ðDω=πÞ sin 2ðωtÞdt ¼ ðD=2ÞþðD=2Þ ¼D(the hysteresis loop area). Now, we have
gavðtÞ ¼1V
ZVgðx; tÞdv¼ l0ω
2sin ðωtÞþ Dω
πsin 2ðωtÞ ðA7Þ
We apply the divergence theorem to transform the volume integral of Eq. (A2) to a surface integral:
1V
ZV∇ k∇T dv¼ 1
V
ZSk∂T∂n
ds ðA8Þ
The surface integralRSkð∂T=∂nÞds includes the heat convection through the rod's side surface with the heat flow
Qconvð ¼ �hAsideðT�T0Þ ¼ �h2πRL0ðT�T0ÞÞ (h is the natural convection coefficient of the side surface in air and depends onthe temperature difference (Holman, 2009)) and the heat conduction through the two end cross-sections with the heat flowQcondð ¼ �2kAendjdT=dxj ¼ �2kπR2ðαðT�T0Þ=L0Þ; k is the conductivity and α is a constant). Now
RSkð∂T=∂nÞds (the total heat
flow through the outer surface S) of Eq. (A8) becomes:ZSk∂T∂n
ds¼ �2αkπR2 ðT�T0ÞL0
�h2πRL0ðT�T0Þ ¼ �h2πRL0ðT�T0Þ ðA9Þ
In the above, h is the lumped effective heat convection coefficient of the side surface (i.e. already including theconduction contribution at the two end cross-sections of the rod) and h¼ ðð2αk=L20Þþð2h=RÞÞðR=2Þ. It is seen that h decreaseswith the increase in L0 and h-h when L0c
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðαkR=hÞ
p. So, with Eqs. (A7) and (A9), (A2) becomes
λdTdt
¼ � 2hR
ðT�T0Þþl0ω2
sin ðωtÞþ Dωπ
sin 2ðωtÞ ðA10Þ
Since both h and D depend on the temperature and the temperature history for each loading frequency, Eq. (A10) is anonlinear ordinary differential equation (ODE). For the purpose of simplicity and as a first approximation, we simply take hand D in Eq. (A10) as h¼hs and D¼Ds, i.e., using the steady-state values of h and D for each frequency of loading. Then, Eq.(A10) becomes ODE with constant coefficients:
λdTdt
¼ � 2hsR
ðT�T0Þþl0ω2
sin ðωtÞþ Dsω
πsin 2ðωtÞ ðA11Þ
Solving Eq. (A11) with the initial condition T jt ¼ 0 ¼ T0, we have
TðtÞ ¼ T0þDstshω2πλ
!þ l0tsh
2ω2
2λð1þtsh2ω2Þ
� 2Dstsh3ω3
πλð1þ4tsh2ω2Þ
0@
1Ae� t=tsh þ l0tshω
2λffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1þtsh
2ω2
q sin ωt� cos �1 1ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1þtsh
2ω2
q0B@
1CA
264
� Dstshω
2πλffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1þ4tsh
2ω2
q sin 2ωtþ sin �1 1ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1þ4tsh
2ω2
q0B@
1CA375 ðA12Þ
where tsh ð ¼ λR=2hs Þ is the characteristic time scale of the lumped effective convection through the side surface. The firstterm on the right side of Eq. (A12) gives the steady-state mean temperature of the specimen, which is caused by theaccumulation of the steady-state hysteresis heat (stress–strain loop area) of the phase transition. The second term is thespecimen's average temperature variation in the transient stage. It decays exponentially with time t. Its sign depends onthe values of l0;D; λ;ω; tsh . The last term represents the temperature oscillations caused by latent heat and hysteresis heat,respectively. It is noticed that, different from latent heat release, there are two heat pulses (one in loading and one inunloading) that make the period of temperature change (due to the hysteresis heat) only half of that due to the latent heat.The key assumption underlying the lumped analysis is the small temperature gradient in the system, while the geometricshape of the system can be arbitrary (please see the book (Cotta and Mikhailov, 1997) on the lumped analysis method).
Remark: To check the reliability of the thermocouple measurement on the specimen's average temperature, directexperimental observation on the temperature distribution at the specimen's surface along the axis of the rod was performedby using a high time-resolution infrared camera (FLIR SC7700, at the capture rate of 5–200frames/s) as shown in Fig. A3.Fig. A3(1) gives evidence how temperature field varied at high frequency, Fig. A3(3) gives evidence how temperature fieldvaried at intermediate frequency, Fig. A3(5) and (6) show the difference between the mean temperature measured by thethermocouple and that by the infrared camera. During the phase nucleation and transformation, the temperaturedistribution is non-uniform in the beginning because of localized phase transformation, and then becomes more uniformdue to rapid heat conduction within the specimen. For example, during the loading process in the first cycle of highfrequency cyclic phase transition (see Fig. A3(1)), the nucleation and growth of martensite bands release latent heat andcause non-uniform temperature rise (see the non-uniform distributed temperature profiles in Fig. A3(2), line 6 and line 7are the most significant ones). After 0.11 s (1/9 of the period), the temperature becomes uniform (from line 6 to line 8). Thesame phenomena can be seen in the steady-state cycles during intermediate frequency (0.01 Hz) cyclic loading (see Fig. A3

015
20
25
30
35
40
45
Tem
per
ature
T (
oC
)
Axial position x (mm)
020
30
40
50tp/24tp/97tp/18tp/35tp/182tp/9tp/6tp/9tp/180
Axial position x (mm)
Tem
per
ature
T (
oC
)
54
24(oC)
(oC)
0% 6% 0%
0% 6% 0%
1Hz cyclic loading, first cycle Loading
0.01Hz cyclic loading, steady-state cycle Loading
42
12
0
20
30
40
50 Thermocouple Infrared camera
Cycles n
Tem
per
ature
T (
oC
)
0.01Hz
0
20
40
60
80 Thermocouple
Infrared camera
0.4Hz
Tem
per
ature
T (
oC
)
Cycles n
12
34
5
6
7
8
910
(1) (2)
(3)(4)
(5) (6)
1
2
3
4
56
7
8
910
1
2
3
4
5
6
7
8
9
10
1
2
3
4
5
6
7
8
9
10
10 20 30 40
10 20 30 40
20 40 60 801 2 3 4 5 6
Fig. A3. (1) The variation of temperature morphology during the first cycle and (2) the variation of temperature T(x) along the axial position x from thebutton of the rod during loading at that cycle for 1 Hz cyclic loading; and (3) and (4) for 0.01 Hz cyclic loading. Comparison between the specimen's averagetemperatures obtained from thermocouple and from infrared camera at (5) 0.01 Hz and (6) 0.4 Hz. (The readers are referred to the colored web version ofthis article for detailed interpretation of the temperature distribution.)
H. Yin et al. / J. Mech. Phys. Solids 67 (2014) 100–128126
(3) and (4)). By comparing the specimen's average temperatures from three thermocouples and infrared camera in Fig. A3(5)and (6), we can see there is no significant difference, so the specimen's average temperature obtained from thethermocouple in the manuscript can characterize the volume-averaged temperature of the specimen.
References
Ahadi, A., Sun, Q.P., 2013. Stress hysteresis and temperature dependence of phase transition stress in nanostructured NiTi—Effects of grain size. Appl. Phys.Lett. 103, 021902.
Amini, A., He, Y.J., Sun, Q.P., 2011. Loading rate dependency of maximum nanoindentation depth in nano-grained NiTi shape memory alloy. Mater. Lett. 65,464–466.
Abeyaratne, R., Kim, S.J., 1997. Cyclic effects in shape memory alloys: a one-dimensional continuum model. Int. J. Solids Struct. 34, 3273–3289.

H. Yin et al. / J. Mech. Phys. Solids 67 (2014) 100–128 127
Bernardini, D., Rega, G., 2010. The influence of model parameters and of the thermomechanical coupling on the behavior of shape memory devices. Int. J.Nonlinear Mech. 45, 933–946.
Bo, Z.H., Lagoudas, D.C., 1999. Thermomechanical modeling of polycrystalline SMAs under cyclic loading, Part I: theoretical derivations. Int. J. Eng. Sci. 37,1089–1140.
Brinson, L.C., Schmidt, I., Lammering, R., 2004. Stress-induced transformation behavior of a polycrystalline NiTi shape memory alloy: micro andmacromechanical investigations via in situ optical microscopy. J Mech. Phys. Solids 52, 1549–1571.
Courtney, T.H., 1990. Mechanical Behavior of Materials, first ed. McGraw-Hill, New York.Cotta, R.M., Mikhailov, M.D., 1997. Heat Conduction: Lumped Analysis, Integral Transforms, Symbolic Computation, first ed. John Wiley & Sons, New Jersey.Delpueyo, D., Balandraud, X., Grédiac, M., 2011. Applying infrared thermography to analyse martensitic microstructures in a Cu–Al–Be shape-memory alloy
subjected to a cyclic loading. Mater. Sci. Eng. A 528, 8249–8258.Delpueyo, D., Grédiac, M., Balandraud, X., Badulescu, C., 2012. Investigation of martensitic microstructures in a monocrystalline Cu–Al–Be shape memory
alloy with the grid method and infrared thermography. Mech. Mater. 45, 34–51.Demers, V., Brailovski, V., Prokoshkin, S.D., Inaekyan, K.E., 2009. Thermomechanical fatigue of nanostructured Ti–Ni shape memory alloys. Mater. Sci. Eng. A
513–514, 185–196.Dolce, M., Cardone, D., 2001. Mechanical behavior of shape memory alloys for seismic applications 2 Austenite NiTi wires subjected to tension. Int. J. Mech.
Sci. 43, 2657–2677.Dolce, M., Cardone, D., 2005. Fatigue resistance of SMA-martensite bars subjected to flexural bending. Int. J. Mech. Sci. 47, 1693–1717.Gandhi, F., Wolons, D., 1999. Characterization of the pseudoelastic damping behavior of shape memory alloy wires using complex modulus. Smart Mater.
Struct. 8, 49–56.Grabe, C., Bruhns, O.T., 2008. On the viscous and strain rate dependent behavior of polycrystalline NiTi. Int. J. Solids Struct. 45, 1876–1895.He, Y.J., Sun, Q.P., 2009. Effects of structural and material length scales on stress-induced martensite macro-domain patterns in tube configurations. Int. J.
Solids Struct. 46, 3045–3060.He, Y.J., Sun, Q.P., 2010a. Frequency-dependent temperature evolution in NiTi shape memory alloy under cyclic loading. Smart Mater. Struct. 19, 115014.He, Y.J., Sun, Q.P., 2010b. Rate-dependent domain spacing in a stretched NiTi strip. Int. J. Solids Struct. 47, 2775–2783.He, Y.J., Sun, Q.P., 2010c. Macroscopic equilibrium domain structure and geometric compatibility in elastic phase transition of thin plates. Int. J. Mech. Sci.
52, 198–211.He, Y.J., Sun, Q.P., 2011. On non-monotonic rate dependence of stress hysteresis of superelastic shape memory alloy bars. Int. J. Solids Struct. 48, 1688–1695.He, Y.J., Yin, H., Zhou, R.H., Sun, Q.P., 2010. Ambient effects on damping peak of shape memory alloy. Mater. Lett. 64, 1483–1486.Heller, L., Sittner, P., Pilch, J., Landa, M., 2009. Factors controlling superelastic damping capacity of SMAs. J. Mater. Eng. Perform. 18, 603–611.Holman, J.P., 2009. Heat Transfer, 10th ed. Mcgraw-Hill, New York.Hornbogen, E., 2002. Some effects of martensitic transformation on fatigue resistance. Fatigue Fract. Eng. Mater. Struct. 25, 785–790.Humbeeck, J. Van, Delaey, L., 1981. The influence of strain-rate amplitude and temperature on the hysteresis of a pseudoelastic Cu–Zn–Al single crystal. J.
Phys. 42, C5–1007.Kang, G.Z., Kan, Q.H., Qian, L.M., Liu, Y.J., 2009. Ratchetting deformation of super-elastic and shape-memory NiTi alloys. Mech. Mater. 41, 139–153.Kockar, B., Karaman, I., Kim, J.I., Chumlyakov, Y.I., Sharp, J., Yu, C.-J. (Mike)., 2008. Thermomechanical cyclic response of an ultrafine-grained NiTi shape
memory alloy. Acta Mater. 56, 3630–3646.Lagoudas, D.C., Bo, Z.H., 1999. Thermomechanical modeling of polycrystalline SMAs under cyclic loading Part II: material characterization and experimental
results for a stable transformation cycle. Int. J. Eng. Sci. 37, 1141–1173.Leo, P.H., Shield, T.W., Bruno, O.P., 1993. Transient heat transfer effects on the pseudoelastic behavior of shape-memory wires. Acta Metall. Mater. 41,
2477–2485.Lim, T.J., McDowell, D.L., 2002. Cyclic thermomechanical behavior of a polycrystalline pseudoelastic shape memory alloy. J. Mech. Phys. Solids 50, 651–676.Liu, Y., Xie, Z.L., Humbeeck, J. Van, 1999. Cyclic deformation of NiTi shape memory alloys. Mater. Sci. Eng. A 273–275, 673–678.Liu, Y., Mahmud, A., Kursawea, F., Nam, T.H., 2008. Effect of pseudoelastic cycling on the Clausius–Clapeyron relation for stress-inducedmartensitic
transformation in NiTi. J. Alloy Compd. 449, 82–87.Miyazaki, S., Imai, T., Igo, Y., Otska, K., 1986. Effect of cyclic deformation on the pseudoelasticity characteristics of Ti–Ni alloys. Metall. Trans. A 17, 115–120.Morin, C., Moumni, Z., Zaki, W., 2011a. A constitutive model for shape memory alloys accounting for thermomechanical coupling. Int. J. Plast. 27, 748–767.Morin, C., Moumni, Z., Zaki, W., 2011b. Thermomechanical coupling in shape memory alloys under cyclic loadings Experimental analysis and constitutive
modeling. Int. J. Plast. 27, 1959–1980.Muller, I., Villaggio, P., 1977. A model for an elastic–plastic body. Arch. Ration. Mech. Anal. 65, 25–46.Nemat-Nasser, S., Guo, W.G., 2006. Superelastic and cyclic response of NiTi SMA at various strain rates and temperatures. Mech. Mater. 38, 463–474.Ortin, J., 1995. Thermodynamics and kinetics of phase transition: an introduction. In: Berveiller, M., Fischer, F.D. (Eds.), Mechanics of Solids with Phase
Changes. Springer-Verlag, Wien, New York, pp. 1–52.Ortin, J., Delaey, L., 2002. Hysteresis in shape-memory alloys. Int. J. Nonlinear Mech. 37, 1275–1281.Otsuka, K., Wayman, C.M., 1998. Shape Memory Materials. Cambridge University Press, Cambridge, UK.Pan, Q., Cho, C.D., 2007. The investigation of a shape memory alloy micro-damper for MEMS applications. Sensors 7, 1887–1900.Petryk, H., 2005. Thermodynamic conditions for stability in materials with rate-independent dissipation. Philos. Trans. R. Soc. A 363, 2479–2515.Pieczyska, E., Gadaj, S., Nowacki, W.K., Hoshio, K., Makino, Y., Tobushi, H., 2005. Characteristics of energy storage and dissipation in TiNi shape memory
alloy. Sci. Tech. Adv. Mater. 6, 889–894.Piedboeuf, M.C., Gauvin, R., Thomas, M., 1998. Damping behavior of shape memory alloys: strain amplitude, frequency and temperature effects. J. Sound
Vib. 214, 885–901.Planes, A., Manosa, L., 2001. Vibrational properties of shape-memory alloys. Solid State Phys. 55, 159–267.Predki, W., Klonne, M., Knopik, A., 2006. Cyclic torsional loading of pseudoelastic NiTi shape memory alloys: damping and fatigue. Mater. Sci. Eng. A 417,
182–189.Puglisi, G., Truskinovsky, L., 2005. Thermodynamics of rate-independent plasticity. J. Mech. Phys. Solids 53, 655–679.Qian, L.M., Xiao, X.D., Sun, Q.P., Yu, T.X., 2004. Anomalous relationship between hardness and wear properties of a superelastic nickel–titanium alloy. Appl.
Phys. Lett. 84, 1076–1078.Qian, L.M., Sun, Q.P., Xiao, X.D., 2006. Role of phase transition in the unusual microwear behavior of superelastic NiTi shape memory alloy. Wear 260,
509–522.Saadat, S., Salichs, J., Noori, M., Hou, Z., Davoodi, H., Bar-on, I., Suzuki, Y., Masuda, A., 2002. An overview of vibration and seismic applications of NiTi shape
memory alloy. Smart Mater. Struct. 11, 218–229.Schmidt, I., Lammering, R, 2004. The damping behaviour of superelastic NiTi components. Mater. Sci. Eng. A 378, 70–75.Shaw, J.A., Kyriakides, S., 1997. On the nucleation and propagation of phase transformation fronts in a NiTi alloy. Acta Mater. 45, 683–700.Shaw, J.A., Kyriakides, S., 1995. Thermomechanical aspects of NiTi. J. Mech. Phys. Solids 43, 1243–1281.Soul, H., Isalgue, A., Yawny, A., Torra, V., Lovey, F.C., 2010. Pseudoelastic fatigue of NiTi wires: frequency and size effects on damping capacity. Smart Mater.
Struct. 19, 085006.Stachowiak, G.B., McCormick, P.G., 1988. Shape memory behavior associated with the R and Martensitic transformations in a NiTi alloy. Acta Metal. 36, 291–297.Stalmans, R., Humbeeck, J. Van, Delaey, L., 1992. The two way memory effect in copper-based shape memory alloys-thermodynamics and mechanisms. Acta
Metall. Mater. 40, 2921–2931.Stalmans, R., Humbeeck, J, Van, Delaey, L., 1994. Degradation of the shape memory effect in copper-based alloys. Scr. Metall. Mater. 31, 1573–1576.

H. Yin et al. / J. Mech. Phys. Solids 67 (2014) 100–128128
Strnadel, B., Ohashi, S., Ohtsuka, H., Miyazaki, S., Ishihara, T., 1995. Effect of mechanical cycling on the pseudoelasticity characteristics of Ti–Ni and Ti–Ni–Cualloys. Mater. Sci. Eng. A 203, 187–196.
Sun, Q.P., He, Y.J., 2008. A multiscale continuummodel of the grain-size dependence of the stress hysteresis in shape memory alloy polycrystals. Int. J. SolidsStruct. 45, 3868–3896.
Sun, Q.P., Zhao, H., Zhou, R.H., Saletti, D., Yin, H., 2012. Recent advances in spatiotemporal evolution of thermomechanical fields during the solid–solidphase transition. CR. Mecanique 340, 349–358.
Tanaka, K., Hayashi, T., Itoh, Y., Tobushi, H., 1992. Analysis of thermomechanical behavior of shape memory alloys. Mech. Mater. 13, 207–215.Tanaka, K., Tanaka, Y., Enomoto, K., Poterasu, V.F., Sugano, Y., 1993. Design of thermoelastic materials using direct sensitivity and optimization methods.
Reduction of thermal stresses in functionally gradient materials. Comput. Method Appl. M 106, 271–284.Tobushi, H., Hachisuka, T., Yamada, S., Lin, P.H., 1997. Rotating-bending fatigue of a TiNi shape-memory alloy wire. Mech. Mater. 26, 35–42.Tobushi, H., Shimeno, Y., Hachisuka, T., Tanaka, K., 1998. Influence of strain rate on superelastic properties of TiNi shape memory alloy. Mater. Charact. 57,
58–63.Torra, V., Auguet, C., Isalgue, A., Lovey, F.C., Sepulveda, A., Soul, H., 2010. Metastable effects on martensitic transformation in SMA Part VIII. Temperature
effects on cycling. J. Therm. Anal. Calorim. 102, 671–680.Vitiello, A., Giorleo, G., Morace, R.E., 2005. Analysis of thermomechanical behaviors of Nitinol wires with high strain rates. Smart Mater. Struct. 14, 215–221.Yan, Y., Yin, H., Sun, Q.P., Huo, Y., 2012. Rate dependence of temperature fields and energy dissipations in non-static pseudoelasticity. Continuum Mech.
Therm. 24, 675–695.Yang, S.Y., Liu, Y., Wang, C.P., Liu, X.J., 2012. Martensite stabilization and thermal cycling stability of two-phase NiMnGa-based high-temperature shape
memory alloys. Acta Mater. 60, 4255–4267.Yin, H., 2013. Ph.D. thesis. The Hong Kong University of Science and Technology.Yin, H., Sun, Q.P., 2012. Temperature variation in NiTi shape memory alloy during cyclic phase transition. J. Mater. Eng. Perform. 21, 2505–2508.Yin, H., Yan, Y., Huo, Y.Z., Sun, Q.P., 2013. Rate dependent damping of single crystal CuAlNi shape memory alloy. Mater. Lett. 109, 287–290.Zaki, W., Moumni, Z., 2007. A 3D model of the cyclic thermomechanical behavior of shape memory alloys. J. Mech. Phys. Solids 55, 2427–2454.Zhang, X.H., Feng, P., He, Y.J., Yu, T.X., Sun, Q.P., 2010. Experimental study on rate dependence of macroscopic domain and stress hysteresis in NiTi shape
memory alloy strips. Int. J. Mech. Sci. 52, 1660–1670.Zhu, S., Zhang, Y., 2007. A thermomechanical constitutive model for superelastic SMAwire with strain-rate dependence. Smart Mater. Struct. 16, 1696–1707
.