Embed Size (px)
Citation preview

HSEHealth & Safety
Executive
Efficient techniques for risk assessment ofspace frame platforms exposed to random
wave and current loading
Some thoughts on extension to cover effects ofintermittency and directionality
Prepared by theUniversity of Liverpool
for the Health and Safety Executive
OFFSHORE TECHNOLOGY REPORT
2002/011

HSEHealth & Safety
Executive
Efficient techniques for risk assessment ofspace frame platforms exposed to random
wave and current loading
Some thoughts on extension to cover effects ofintermittency and directionality
G Najafian, R Burrows & R G TickellDepartment of Civil Engineering
University of LiverpoolLiverpoolL69 3GQ
United Kingdom
HSE BOOKS

ii
© Crown copyright 2002Applications for reproduction should be made in writing to:Copyright Unit, Her Majesty’s Stationery Office,St Clements House, 2-16 Colegate, Norwich NR3 1BQ
First published 2002
ISBN 0 7176 2342 4
All rights reserved. No part of this publication may bereproduced, stored in a retrieval system, or transmittedin any form or by any means (electronic, mechanical,photocopying, recording or otherwise) without the priorwritten permission of the copyright owner.
This report is made available by the Health and SafetyExecutive as part of a series of reports of work which hasbeen supported by funds provided by the Executive.Neither the Executive, nor the contractors concernedassume any liability for the reports nor do theynecessarily reflect the views or policy of the Executive.

iii
EXECUTIVE SUMMARY Offshore structures are subject to a wide variety of environmental loads (such as wind, wave and current) all of which exhibit a high degree of statistical uncertainty. The structural components, e.g., beams, columns, connections, piles, conductors and risers, must be proportioned to resist the effects of these loads. Uncertainties in capacities or member strengths arise because of material and fabrication variability and limitations in engineering theories to predict and conveniently interpret element and system response and capacity. As a result, a reliability-based approach is necessary to account for these uncertainties. One of the most important uncertainties arises in the prediction of the probability distribution of the extreme values of response (during a given period of exposure) due to wave and current loading. The major obstacle in the probabilistic analysis of wave and current effects, is the nonlinearity of the drag component of Morison's wave loading which results in non-Gaussian probability distributions for both loading and response. The problem is further compounded in the free surface zone due to load intermittency. The dynamic response of offshore structures is usually closer to a Gaussian distribution than that of quasi-static response, especially for structures with low damping ratios. However, extensive Monte Carlo simulations have shown that the dynamic responses of drag-dominated structures such as jacket platforms are distinctly non-Gaussian. Extensive time-domain simulation can be used to establish the probability distribution of response extreme values with good accuracy. However, given that the probability of failure of a structure during its service time requires the evaluation of response extreme values for many different combinations of significant waveheight, mean zero-crossing period, predominant wave direction, current, etc., extensive time domain simulation becomes impracticable. Consequently, the reliability analysis of the structure must be based on insufficiently long simulations, which leads to insufficiently accurate results due to significant sampling variability, or alternatively, on insufficiently accurate extreme value probability models (such as assuming that the response is Gaussian), which leads to potentially large systematic errors. In either case, the high level of uncertainty will lead to a high notional probability of failure for the structure. On the other hand, the uncertainty in the predicted values of response extremes, when determined from an accurate model, would be small, leading to a much lower notional probability of failure for the structure. It is beneficial, therefore, to develop accurate and efficient techniques for prediction of response extreme values for both quasi-static and dynamic structures. The successful outcome of a recent two-year EPSRC research study was to develop efficient but accurate techniques for the prediction of the probability distribution of the extreme values of response experienced by (linear) jacket structures exposed to random Morison wave loading under stationary sea-states. This resulted in the development of: a Factor Analysis Technique, as a more computationally efficient alternative to time simulation; a Dynamic Excess Kurtosis technique to estimate the scale of non-Gaussianity of the response for dynamic structures; and Najafian’s Extreme Value probability model (NEV) to provide representation of the extremal statistics. The current project has aimed to extend applicability of these methods. The specific objectives were:- to incorporate the effect of current and load intermittency in the splash zone into the NEV probability modelling approach; and also to extend the techniques for efficient evaluation of kurtosis (a crucial parameter in the characterisation of a probability distribution) to cases when current, load intermittency and wave directionality are important. The principal achievements from the study can be summarised as follows: • A robust implementation of the time simulation technique, directed towards the reliable
estimation of extreme values of response has been successfully extended to account for current and load intermittency in the splash zone.
• The Factor Analysis technique has been extended to account for current, wave directionality and load intermittency in the splash zone. The results of this technique have been compared

iv
against those from time simulation technique to confirm both its accuracy and its much higher computational efficiency (about 25 times for long-crested seas and at least 100 times for directional seas).
• The effects of current and load intermittency on the statistical properties of both dynamic and quasi-static responses have been thoroughly investigated.
• Extension of the Dynamic Excess Kurtosis Technique and Najafian’s Extreme Value probability model to the case of structures under the influence of load intermittency and current has been thoroughly investigated. Extensive investigation has shown that the Pierson-Holmes distribution can accurately account for the effect of current on the probability distribution of response. However, it cannot accurately model the effect of the load intermittency in the splash zone on the response probability distribution.
• A methodology for establishing an improved probability model for the response distribution arising from structures subject to load intermittency has been devised. The proposed methodology can also be used to determine the probabilistic properties of the dynamic response from those of the quasi-static response.

v
TABLE OF CONTENTS
Page No.
EXECUTIVE SUMMARY iii
1. BACKGROUND 1 2. THE EFFECT OF CURRENT ON THE WAVE FREQUENCY SPECTRUM 2 3. EVALUATION OF WAVE KINEMATICS IN THE FREE SURFACE ZONE 2 4. ACCOUNTING FOR LOAD INTERMITTENCY IN THE SPLASH ZONE 2 5. TEST STRUCTURES 2 6. TIME SIMULATION PROCEDURE FOR GENERATING EXTREME VALUES AND
OTHER STATISTICAL PROPERTIES OF RESPONSE 3 7. FACTOR ANALYSIS PROCEDURE FOR GENERATING EXTREME VALUES AND
OTHER STATISTICAL PROPERTIES OF RESPONSE 4 8. EXTENSION OF THE TIME SIMULATION AND FACTOR ANALYSIS PROCEDURES
TO ACCOUNT FOR WAVE DIRECTIONALTY 5 9. COMPARISON OF RESPONSE STATISTICS FROM TIME SIMULATION AND
FACTOR ANALYSIS PROCEDURES 7 10. EFFICIENCY OF THE FACTOR ANALYSIS PROCEDURE IN COMPARISON WITH
THE TIME SIMULATION PROCEDURE 7 11. PERFORMANCE OF PIERSON-HOLMES DISTRIBUTION IN MODELLING THE
PROBABILITY DISTRIBUTION OF QUASI-STATIC AND DYNAMIC RESPONSES 8 12. THE EFFECT OF LOAD INTERMITTENCY ON THE PROBABILITY
DISTRIBUTIONS OF THE RESPONSE AND ITS EXTREME VALUES 9 13. DYNAMIC EXCESS KURTOSIS TECHNIQUE 9 14. METHODOLOGY FOR IMPROVING ON THE DYNAMIC EXCESS KURTOSIS
TECHNIQUE AND ESTABLISHING AN ALTERNATIVE TO PIERSON-HOLMES DISTRIBUTION, TO BETTER ACCOUNT FOR LOAD INTERMITTENCY IN THE SPLASH ZONE 10
15. CLOSURE 11 ACKNOWLEDGEMENTS 11
REFERENCES 11

vi
APPENDIX A: THE EFFECT OF CURRENT ON THE FREQUENCY SPECTRUM 45 APPENDIX B: LOAD INTERMITTENCY IN THE SPLASH ZONE 55 APPENDIX C: CROSS-COVARIANCE MATRIX OF WATER PARTICLE KINEMATICS 56

1
1 - BACKGROUND Offshore structures are subject to a wide variety of environmental loads (such as wind, wave and current) all of which exhibit a high degree of statistical uncertainty. The structural components, e.g., beams, columns, connections, piles, conductors and risers, must be proportioned to resist the effects of these loads. Uncertainties in capacities or member strengths arise because of material and fabrication variability and limitations in engineering theories to predict and conveniently interpret element and system response and capacity. As a result, a reliability-based approach is necessary to account for these uncertainties. One of the most important uncertainties arises in the prediction of the probability distribution of the extreme values of response (during a given period of exposure) due to wave and current loading. The major obstacle in the probabilistic analysis of wave and current effects, is the nonlinearity of the drag component of Morison's wave loading which results in non-Gaussian probability distributions for both loading and response. The problem is further compounded by the members in the free surface zone due to load intermittency. The dynamic response of offshore structures is usually closer to a Gaussian distribution than that of quasi-static response, especially for structures with low damping ratios. However, extensive Monte Carlo simulations have shown that the dynamic responses of drag-dominated structures such as jacket platforms are distinctly non-Gaussian (Karunakaran et al., 1992). Extensive time-domain simulation can be used to establish the probability distribution of response extreme values with good accuracy. However, given that the probability of failure of a structure during its service time requires the evaluation of response extreme values for many different combinations of significant waveheight, mean zero-crossing period, predominant wave direction, current, etc., extensive time domain simulation becomes impracticable. Consequently, the reliability analysis of the structure must be based on insufficiently long simulations, which leads to insufficiently accurate results due to significant sampling variability, or alternatively, on insufficiently accurate extreme value probability models (such as assuming that the response is Gaussian), which leads to potentially large systematic errors. In either case, the high level of uncertainty will lead to a high notional probability of failure for the structure (Ditlevsen and Madsen, 1996). On the other hand, the uncertainty in the predicted values of response extremes, when determined from an accurate model, would be small, leading to a much lower notional probability of failure for the structure (Ditlevsen and Madsen, 1996). It is therefore beneficial to develop accurate and efficient techniques for prediction of response extreme values for both quasi-static and dynamic structures. The objective of a recent two-year EPSRC research study (Burrows, Najafian, Tickell, Hearn and Metcalfe, 2001), which led to the current project, was to develop efficient but accurate techniques for the prediction of the probability distribution of the response extreme values for a (linear) jacket structure exposed to random Morison wave loading due to a (stationary) sea-state. The study led to the development of the following procedure:
i. The computationally efficient Factor Analysis Technique (Najafian et al, 2002) was developed to simulate statistically independent values of the quasi-static response. The simulated data can be used to accurately estimate the first four statistical moments (mean, standard deviation, skewness and kurtosis) of quasi-static response. This is a substantial improvement over standard time simulation approaches.
ii. For cases when dynamic effects are important, the Dynamic Excess Kurtosis Technique was developed to calculate the kurtosis of dynamic response from their corresponding quasi-static values.
iii. Use the first four statistical moments of response to calculate the theoretical probability distribution of response by assuming that it is Pierson-Holmes (P-H) distributed (Najafian et al, 2000).

2
iv. Use Najafian’s Extreme Value (NEV) probability model (which is based on the assumption that the response itself is P-H distributed) to establish the theoretical probability distribution of response extreme values during a given period of exposure.
These techniques were tested by exposing a test structure to sea-states of varying intensity and proved to be both efficient and accurate. However, due to time restrictions, the effect of current, load intermittency in the splash zone and wave directionality were not incorporated in the developed models. The purpose of the current project reported here was to carry out further work to investigate the effect of current and load intermittency on the probabilistic properties of the response and its extreme values and to extend the foregoing procedure to cases when current, load intermittency and wave directionality are important. In particular, it was intended • to extend the Factor Analysis Technique to account for current, load intermittency in the
splash zone and wave directionality. • to establish whether the Dynamic Excess Kurtosis Technique leads to sufficiently accurate
estimates of dynamic response kurtosis. • to establish whether Pierson-Holmes and Najafian’s Extreme Value probability distributions
are good models for the distribution of response and its extreme values, respectively. • to introduce alternative methodology for establishing accurate probability models for the
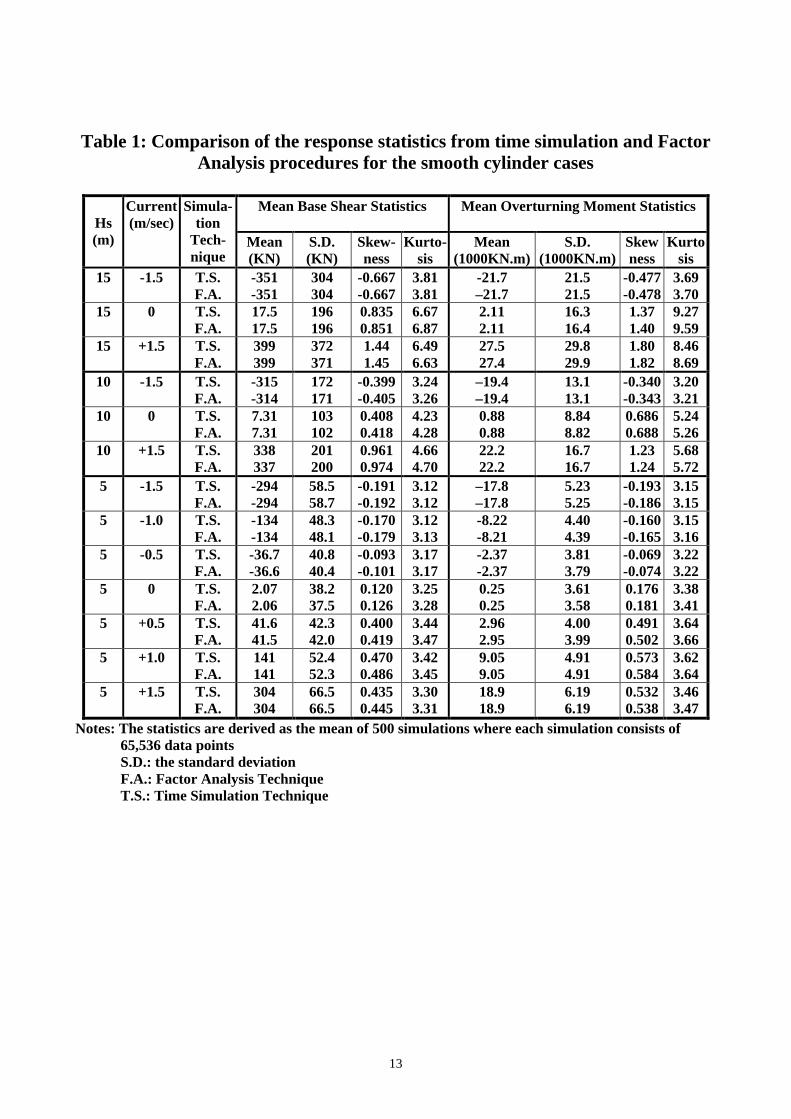
response and its extreme values in case the foregoing models are not sufficiently accurate. 2 - THE EFFECT OF CURRENT ON THE WAVE FREQUENCY SPECTRUM Both positive and negative currents have been considered in this project (a current is considered to be positive if it is in the direction of wave propagation). The surface elevation frequency spectrum in the frame of reference moving with the current would be different from that in a stationary frame of reference because the speed of the wave propagation in the two frames of reference would be different. In this project, the frequency spectrum in the frame of reference moving with the current is assumed to be a Pierson-Moskowitz spectrum defined by its significant wave height. This will then be modified to define the frequency spectrum for the stationary observer, i.e. the structure. The related issues are discussed in Hedges et al (1979), Hedges (1987), Hedges and Lee (1992) and Hedges and Akrigg (1993) and are given in Appendix A for completeness. The effects of both positive and negative currents on the surface elevation frequency spectrum are demonstrated in Figures 1 and 2, respectively. 3 - EVALUATION OF WAVE KINEMATICS IN THE FREE SURFACE ZONE A common industry practice consists of using linear wave theory in conjunction with empirical wave stretching techniques to provide a more realistic representation of near-surface water kinematics. The empirical wave stretching techniques popular in the offshore industry include vertical stretching, linear extrapolation, Wheeler stretching and delta stretching (Couch and Conte, 1997). Vertical stretching (Marshall and Inglis, 1986) is computationally more efficient and hence was adopted for this study. 4 - ACCOUNTING FOR LOAD INTERMITTENCY IN THE SPLASH ZONE A Heavyside function was used to account for load intermittency in the splash zone. The details are given in Appendix B. 5 - TEST STRUCTURES The main test structure, used in this report, is a simple two-dimensional structure in a water depth of 120m, as shown in Figure. 3. It is composed of three 1.00m diameter vertical legs with 23 nodal loads representing the distributed load on each leg. The distance between any two

3
adjacent legs is 20m. The total number of loads was considered to be 69, so that the statistical properties of response such as its kurtosis or extreme value probability distribution can be calculated accurately by extensive time simulation without excessive computer run-time demand. It should be noted that the foregoing structure is fictitious and is meant to easily provide a relatively large number of nodal loads with some spatial (horizontal and vertical) separation. In order to investigate the effect of water depth on probabilistic properties of response, a second test structure was introduced. The test structure, shown in Figure 4, is similar to the first test structure except that the water depth has increased to 250m and the number of nodes on each leg has increased to 33. Unless otherwise specified all the results in this report refer to the main test structure, shown in Figure 3. The structure was subjected to various uni-directional Pierson-Moskowitz sea-states (as measured by the observer moving with the current) defined by their associated significant wave heights (Hs = 15m, 10m and 5m). The current was assumed to vary between ±1.5m/sec and the mean wave zero-upcrossing period (in seconds and for the observer moving with the current) for each sea-state was taken to be sz HT 55.3= . As in Karunakaran et al (1993) and Vugts et al (1998), the two responses chosen for investigation were base shear and overturning moment. For all tests, the member surfaces were assumed to be either smooth or rough. The drag and inertia coefficients for the case of smooth cylinders were assumed to be 0.70 and 1.70, and for the case of rough cylinders were taken to be 1.3 and 1.5, respectively. For the case of dynamic response, the natural frequency of the structural system was assumed to be 0.15 Hz and the equivalent viscous damping (structural + hydrodynamic) ratio was assumed to be 0.03 unless otherwise specified. These values represent a structure with a significant dynamic response, modelled as a single-degree-of-freedom system with no time-varying hydrodynamic damping (fluid-structure interaction). Structures exposed to directional seas have also been considered. As simulation of directional seas are time consuming, a single-column structure, as shown in Figure 5, was chosen for this purpose. The spreading function is defined in Eq. (6) of Section 8 and the spreading parameter was taken to be n = 4 for all frequencies. 6 - TIME SIMULATION PROCEDURE FOR GENERATING EXTREME VALUES
AND OTHER STATISTICAL PROPERTIES OF RESPONSE The steps in this procedure are: (refer to the flowchart in Figure 6) 1. Define the frequency spectrum in the frame of reference moving with the current as a
Pierson-Moskowitz spectrum. 2. Calculate the frequency spectrum for the stationary observer, i.e. the structure (Appendix
A). 3. Simulate surface elevation as a Gaussian process at an arbitrary point from the given
frequency spectrum for a given period of time (e.g. three hours). 4. Calculate water particle kinematics at different nodes from the surface elevation record by
using appropriate transfer functions from linear wave theory and accounting for the presence of current (Hedges, 1987). Then add the current velocity to wave induced water particle velocity.
5. Calculate Morison loads at each node (Morison et al, 1950) accounting for load intermittency in the splash zone.
6. Calculate quasi-static response as a linear combination of nodal loads. If dynamic effects are important, the discrete Fourier transform (DFT) of the dynamic response is determined by multiplying the DFT of the quasi-static response by the frequency response function of the structure. The dynamic response is then determined by taking the Inverse Fourier Transform of its DFT.

4
7. The simulated records can be used to determine statistical properties of response, such as its mean period or its first four statistical moments. Furthermore, both the larger and the smaller extreme values of the generated response record can be determined. It should be noted that the ‘larger’ extreme value is always above the response mean while the ‘smaller’ extreme value is always below the mean. The larger and the smaller extreme values are sometimes referred to as the positive and negative extreme values. This terminology can, however, be misleading as both the larger and the smaller extremes can be positive or negative, depending on the value of the response mean. It is, therefore, preferable to differentiate between the two extremes by designation as the larger and the smaller extreme values.
8. Repeat the process many times to generate a large number of response extreme values and response statistics.
9. The theoretical value of the response statistics can be calculated by assuming that they are equal to the mean of the statistics from all the simulated records. In addition, response extreme values can be plotted on a Gumbel probability paper to compare their distribution against those predicted by different probability models.
According to Linear Random Wave Theory (LRWT), uni-directional seas can be modelled as the sum of a large number of progressive linear waves of different amplitudes travelling in the same direction (positive x axis) with random phases (Borgman, 1969). Then the surface elevation at point x at time t can be modelled as
)(cos),(1
iii
N
ii xktA tx εωη −−= ∑
=
(1)
where ωi are a set of equally-spaced discrete wave frequencies and ki are their associated wavenumbers. εi is the phase angle distributed uniformly in the range 0<εi<2π, and Ai is determined by one of the following two methods: (1) Deterministic Spectrum Amplitude technique (DSA) and (2) Non-Deterministic Spectrum Amplitude (NSA) Technique. That is
2*)()(
)(2)(
22ii
DSAiNSAi
iDSAi
A A
G A
βα
ωωηη
+=
∆=
(2)
where Gηη(ω) is the surface elevation frequency spectrum and ∆ω is the desired frequency interval. αi and βi are two independent standardised Gaussian random variables. Rice (1944, 1945) has shown that when N approaches infinity, the two models will be equivalent to each other. The difference between the two techniques for finite values of N have been discussed in Tucker et al (1984), Grigoriu (1993) and Morooka and Yokoo (1997). As far as the extreme value analysis is concerned, only the NSA technique should be used, especially for short simulations. 7 – FACTOR ANALYSIS PROCEDURE FOR GENERATING EXTREME VALUES
AND OTHER STATISTICAL PROPERTIES OF RESPONSE The steps in this procedure (Najafian et al, 2002) are: (refer to the flowchart in Figure 7) 1. Define the frequency spectrum in the frame of reference moving with the current as a
Pierson-Moskowitz spectrum. 2. Calculate the frequency spectrum for the stationary observer, i.e. the structure. 3. Use linear wave theory to calculate the matrix of cross-covariances between water particle
kinematics and surface elevation at different nodes. 4. Calculate the eigenvalues and eigenvectors of the foregoing matrix. 5. Determine all the important eigenvalues and their associated eigenvectors and ignore the
rest of them.

5
6. Simulate water particle kinematics and surface elevation at each node as a linear combination of important eigenvectors’ components.
7. Calculate Morison loads at each node accounting for load intermittency in the splash zone. 8. Calculate quasi-static response as a linear combination of all the nodal loads. 9. Calculate the statistical properties of quasi-static response such as its first four statistical
moments and its probability distribution. 10. If dynamic effects are important, use the Dynamic Excess Kurtosis Technique to calculate
the statistical properties of dynamic response such as its first four statistical moments. 11. Establish the probability distribution of response extreme values from Najafian’s Extreme
Value probability distribution (Burrows et al, 2001) and compare it with the probability distribution of extreme values from time simulation.
The importance of different eigenvectors for different values of significant waveheight and cylinder roughness condition are shown graphically in Figures 8-10. The eigenvalues have been normalised so that their total sum is equal to unity. These figures indicate that in all cases ten eigenvectors are sufficient. 8 - EXTENSION OF THE TIME SIMULATION AND FACTOR ANALYSIS
PROCEDURES TO ACCOUNT FOR WAVE DIRECTIONALTY Short-crested (directional) seas can be modelled as the sum of a large number of progressive linear waves of different amplitudes travelling in different directions with random phases (Borgman,1969). Let x and y be the coordinates in an arbitrary horizontal Cartesian coordinate system such that the positive y axis is 90 degrees anti-clockwise from the positive x axis. The waves are assumed to travel in a direction θ measured anti-clockwise from the positive x axis. Then the surface elevation at point (x,y) at time t can be modelled as
)]sincos[cos(),,(1 1
ijjji
N
i
M
jiij yxktAtyx εθθωη −+−= ∑∑
= =
(3)
where, as before, ωi are a set of equally-spaced discrete wave frequencies and ki are their associated wave numbers. εij are random phase angles, uniformly distributed in the range [0, 2π]. Aij is the amplitude of the wave with frequency ωi and direction θj. This model is frequently referred to as the double summation model. The directional wave spectrum Gηη(ω,θ) is defined by saying that the wave energy travelling in a small range of frequency ∆ω and a small range of directions ∆θ is G(ω,θ)∆ω∆θ. Then it is standard practice to put Gηη(ω,θ) = Gηη(ω).D(ω,θ), where Gηη(ω) is the point (uni-directional) spectrum and D(ω,θ) represents the angular distribution of energy at frequency ω. The relationship between Aij in the forgoing equation and the directional spectrum is
2*)()(
1),(
),()(
),(.)(2),(2)(
22
max
min
max
min
iiDSAijNSAij
jiijiDSAij
A A
dD
dGG
DGGA
βα
θθω
θθωω
θθωωωθωθω
θ
θ
θ
θηηηη
ηηηη
+=
=
=
∆∆=∆∆=
∫
∫ (4)

6
where, as before, (Aij)DSA and (Aij)NSA refer to the wave amplitude determined from Deterministic Spectrum Amplitude and Non-Deterministic Spectrum Amplitude techniques, respectively, and αi and βi are two independent standardised Gaussian random variables. As was the case for uni-directional seas, only the NSA technique should be used for extreme value analysis, especially for short simulations. The spreading function is defined by (Miles and Funke, 1989)
n
nn
fD
−+Γ
+Γ=
max
0
max 2)(
cos.)2/2/1(2
)2/1(),(
θθθπ
θπ
θ (5)
where Γ is the gamma function and θ0 is the mean (predominant) wave direction and the spreading parameter n may be a function of frequency. θmax is usually set at π/2. Then
( )0cos.
)2/2/1()2/1(
),( θθπ
θ −+Γ
+Γ= n
nn
fD (6)
For simple analysis, where a constant value of n, independent of frequency is used, the value n = 4 is recommended (Barltrop, 1998). The spreading function for n = 4 is shown in Figure 11. The double summation model offers a clear mental picture of the directional seas. However, its application for simulating directional seas is problematic as it leads to seas which are not homogeneous. In other words, the wave energy at a particular frequency can significantly vary from one point to another point (Forristal, 1981 and Pinkster, 1984). In fact, the wave energy in any frequency band can vary over space from approximately 0 to 4 times its average value regardless of how many directions are used (Miles and Funke, 1989). The problem in applying the double summation model is that all the energy in a cell of finite size ∆ω by ∆θ is represented by a single sinusoid. Consequently all the sinusoids with the same frequency travelling at different directions will combine to produce a sinusoidal water surface movement at that frequency, whose amplitude varies from point to point. In real seas this problem does not arise as the frequency band ∆ω is composed of many different frequencies. In other words, the signal in the frequency band ∆ω is a narrow-band random process rather than a sinusoid. Different techniques for simulating directional seas have been discussed by Miles and Funke, 1989 and Yuxiu et al, 1991. The recommended model is the Single Direction per Frequency Model. The Single Direction per Frequency model is defined as
2/2/
)]sincos[cos(),,(1 1
ωωωωω
εθθωη
∆+<<∆−
−+−= ∑∑= =
iiji
ijjjij
N
i
M
jijij yxktAtyx
(7)
Therefore, the difference between the double summation model defined in Eq. (3), and the Single Direction per Frequency model is that in the former model, the frequency interval [ωi-∆ω/2, ωi+∆ω/2] is always represented by a single frequency ωi, regardless of the direction θj, while in the latter model, the foregoing interval is represented by a different frequency within the interval for each direction. The Single Direction per Frequency model can efficiently be calculated via FFT if all the ωij are equally spaced. Therefore, in practice, the frequency interval

7
∆ω is divided into M equal subintervals, where M is the number of discrete directions. The Single Direction per Frequency model can then be written as
Mj
yxktAtyx
iij
ijjjij
N
i
M
jijij
ωωωω
εθθωη
∆−+∆−=
−+−= ∑∑= =
)2/1(2/
)]sincos[cos(),,(1 1
(8)
The extension of the Factor Analysis technique to directional seas does not involve any new theoretical issues. Evaluation of the matrix of cross-covariances between water particle kinematics at different nodes requires integration over both frequency and direction (Borgman, 1977). A complete list of the required cross-covariances is given in Appendix C. 9 - COMPARISON OF RESPONSE STATISTICS FROM TIME SIMULATION AND
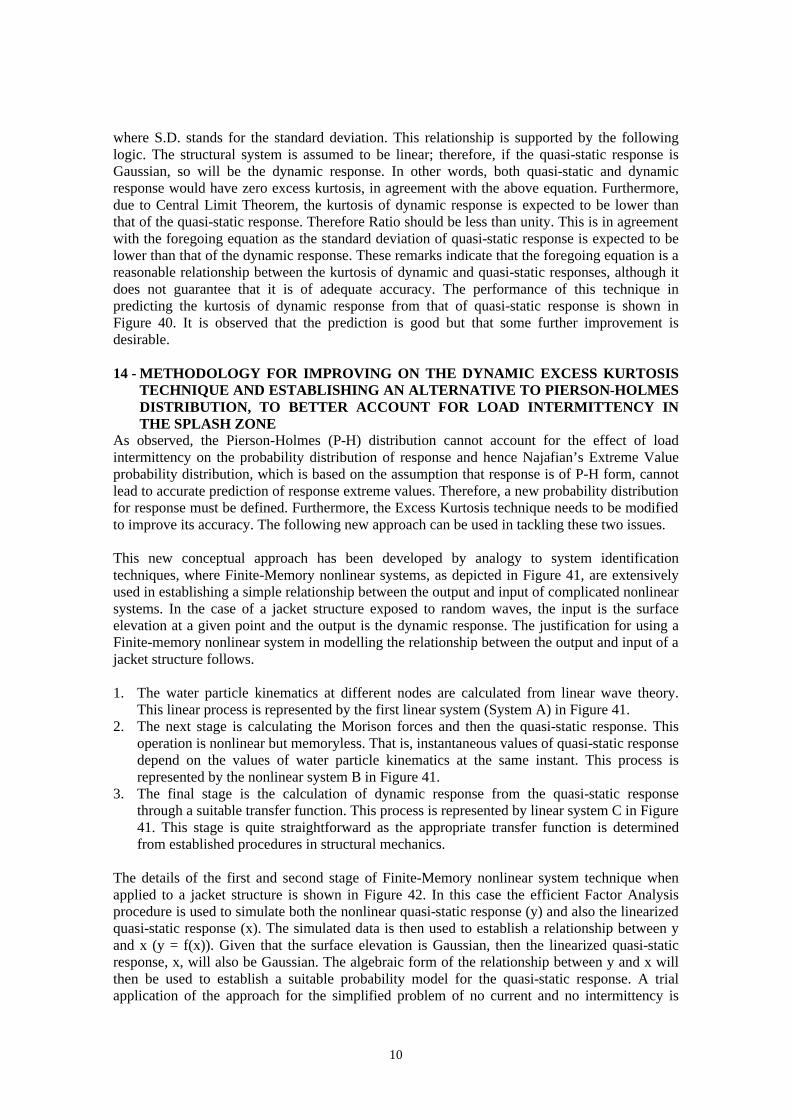
FACTOR ANALYSIS PROCEDURES In order to establish the accuracy of the technique and its efficiency, the main test structure (Figure 3) has been exposed to different combinations of (uni-directional) sea-states and current speeds. In each case 500 simulations have been performed where each simulation consists of 65,536 independent data points. For each simulation, the response mean, standard deviation, skewness and kurtosis have been calculated. This leads to a sample of 500 for each statistic. The mean of the sample is taken to be the real value of its associated statistic. Furthermore, for each case 500 time simulations have been performed where each simulation consists of 65,536 (correlated) data points. The time interval between two successive points is 0.25 seconds and therefore the duration of each time simulation is 16384 seconds (about 4½ hours). This exercise leads to a sample of 500 for the response mean, standard deviation, skewness and kurtosis. As before, the mean of the sample is taken to be the real value of its associated statistic. The statistics of (quasi-static) base shear and overturning moment from the two independent techniques are presented in Tables 1 and 2 for smooth and rough cylinder cases, respectively. The agreement between the two sets of values is very good. The effect of wave directionality on the statistics of response are presented in Table 3, where the structure in Figure 5 has been exposed to both uni-directional and directional (n = 4) seas. As expected, the wave directionality leads to lower values of response mean and standard deviations. Furthermore, the response kurtosis also decreases due to lower correlation between nodal kinematics in directional seas. 10 - EFFICIENCY OF THE FACTOR ANALYSIS PROCEDURE IN COMPARISON
WITH THE TIME SIMULATION PROCEDURE Data points simulated by the Factor Analysis technique are independent from each other (Figure 12) while those from the Time Simulation procedure are correlated (Figure 13). Consequently, the sampling variability of statistical properties of response when calculated from the Factor Analysis technique is considerably smaller than the sampling variability of their corresponding values from the Time Simulation technique, as depicted in Figures 14 to 23. Furthermore, simulating N data points by Factor Analysis is at least two times faster than simulating the same number of data points by time simulation. It can therefore be concluded that the Factor Analysis technique is considerably more efficient than the Time Simulation procedure in achieving the probability distribution of response and its extreme values to a given level of accuracy. In the case of uni-directional random seas the Factor Analysis procedure, on average, is about 25 times more efficient than time simulation. It should be noted that in some cases the number

8
of eigenvectors can be reduced and hence the efficiency can be improved. For example, reducing the number of eigenvectors from 10 to 5 in the case of Hs = 15m has a very small effect on its probability distribution. 11 - PERFORMANCE OF PIERSON-HOLMES DISTRIBUTION IN MODELLING
THE PROBABILITY DISTRIBUTION OF QUASI-STATIC AND DYNAMIC RESPONSE
• The Pierson-Holmes distribution is based on Morison’s equation and is defined as (Najafian et
al, 2000) ( ) 231121 XXXY βγγββ ++++= (9)
where Y is the random variable with Pierson-Holmes distribution, β1, β2, β3 and γ are the four parameters of the distribution 1X and 2X are two Gaussian random variables with the following properties 1;0][][ 2121 ==== XXXEXE σσ (10) • The skewness parameter, γ, models those factors such as current or load intermittency in the
splash zone which give rise to skewness. • The probability distribution of quasi-static overturning moment for a negative and positive
current are shown in Figures 24 and 25, respectively (load intermittency in the splash zone is ignored). It is observed that for these no-intermittency cases the Pierson-Holmes distribution is a very good model for the simulated data.
• The effect of load intermittency on the probability distribution of the response in the
absence of current is demonstrated in Figure 26, where the asymmetry in the probability distribution is clearly shown. It is observed that the simulated data deviates from the theoretical Pierson-Holmes (P-H) distribution. The effect of the asymmetry on the probability distribution of the extreme values is shown in Figure 27, where the magnitude of the larger extreme values are significantly higher than the magnitude of the smaller extreme values.
• The effect of positive current on the probability distribution of the quasi-static base shear
and its extreme values are shown in Figures 28 and 29. It is observed that, the probability distribution is heavily skewed toward positive values due to the combined effect of positive current and load intermittency. The P-H distribution is a relatively good model for the positive tail but is substantially different from that of the negative tail. The effect of the large asymmetry of the probability distribution on the extreme values is a huge gap between the magnitude of the larger and the smaller extreme values as shown in Figure 29.
• The effect of negative current on the probability distribution of the quasi-static response and
its extreme values are shown in Figures 30 to 35. In the case of quasi-static base shear (Figure 30), the probability distribution is skewed toward negative values due to the effect of negative current. The P-H distribution is a relatively good model for the negative tail but is substantially different from that of the positive tail, which is due to the effect of the load

9
intermittency in the splash zone. The effect of the asymmetry of the probability distribution together with a large negative response mean on the extreme values is a relatively large gap between the magnitude of the larger and the smaller extreme values as shown in Figure 31. Figures 32 and 33 are the same as Figures 30 and 31 except that they refer to the quasi-static overturning moment. The probability distribution is similar to that of the base shear except that the departure of the positive tail of the P-H distribution from the observed data is even more severe. The effect of this on the probability distribution of the extreme values is shown in Figure 33, where it is observed that for low probabilities of exceedence the magnitude of the larger extreme value is higher than the magnitude of the smaller extreme value notwithstanding the large negative current. In other words, the effect of load intermittency has proved to be more significant than the effect of the negative current. This can lead to some problem in predicting the extreme values at low probabilities of exceedence, as the positive tail of the response cannot be accurately modelled by the P-H distribution. Figures 34 and 35 are similar to Figures 32 and 33, except that they refer to dynamic responses. The difference between dynamic and quasi-static responses is not as pronounced as in the case of negative current the frequency spectrum is shifted toward the left and this subdues the dynamic response. For large dynamic effect, the asymmetry is expected to decrease and these problems will be partially resolved.
• Figure 36 is similar to Figure 30 except that the water depth has increased to 250m. It is
observed that in deeper water the departure from Pierson-Holmes distribution has decreased but that it is still significant.
• It is concluded that the Pierson-Holmes distribution can accurately account for the effect of
current on the probability distribution of response but that it cannot adequately cope with the load intermittency in the splash zone.
12 - THE EFFECT OF LOAD INTERMITTENCY ON THE PROBABILITY
DISTRIBUTIONS OF THE RESPONSE The effect of load intermittency on the probability distribution of response can be investigated by comparing the probability distribution of standardised response when the load intermittency is incorporated against its corresponding distribution for the no-intermittency condition. The probability distributions of response for both base shear and overturning moment (for Hs=15m and rough cylinder condition with different current values) are compared for two conditions: 1) load intermittency ignored and 2) load intermittency incorporated. The data was simulated by the Factor Analysis procedure (about one million data points for each case). The distributions are presented in Figures 37 to 39. It is observed that in all cases the departure of the second distribution from the first one (which can be modelled by the Pierson-Holmes distribution) is of the same sign for both positive and negative values of response. This observation can be used in finding a suitable substitute for the Pierson-Holmes distribution (refer to Section 14). 13 - DYNAMIC EXCESS KURTOSIS TECHNIQUE The relationship between the kurtosis of dynamic and quasi-static responses is intuitively taken to be (Burrows et al, 2001)
responseDynamicofDSresponsestaticQuasiofDS
Ratio
KurtosiskurtosisExcesskurtosisexcessstaticQuasiRatiokurtosisexcessDynamic
....
3)(*
−=
−=−=
(11)
10
where S.D. stands for the standard deviation. This relationship is supported by the following logic. The structural system is assumed to be linear; therefore, if the quasi-static response is Gaussian, so will be the dynamic response. In other words, both quasi-static and dynamic response would have zero excess kurtosis, in agreement with the above equation. Furthermore, due to Central Limit Theorem, the kurtosis of dynamic response is expected to be lower than that of the quasi-static response. Therefore Ratio should be less than unity. This is in agreement with the foregoing equation as the standard deviation of quasi-static response is expected to be lower than that of the dynamic response. These remarks indicate that the foregoing equation is a reasonable relationship between the kurtosis of dynamic and quasi-static responses, although it does not guarantee that it is of adequate accuracy. The performance of this technique in predicting the kurtosis of dynamic response from that of quasi-static response is shown in Figure 40. It is observed that the prediction is good but that some further improvement is desirable. 14 - METHODOLOGY FOR IMPROVING ON THE DYNAMIC EXCESS KURTOSIS
TECHNIQUE AND ESTABLISHING AN ALTERNATIVE TO PIERSON-HOLMES DISTRIBUTION, TO BETTER ACCOUNT FOR LOAD INTERMITTENCY IN THE SPLASH ZONE
As observed, the Pierson-Holmes (P-H) distribution cannot account for the effect of load intermittency on the probability distribution of response and hence Najafian’s Extreme Value probability distribution, which is based on the assumption that response is of P-H form, cannot lead to accurate prediction of response extreme values. Therefore, a new probability distribution for response must be defined. Furthermore, the Excess Kurtosis technique needs to be modified to improve its accuracy. The following new approach can be used in tackling these two issues. This new conceptual approach has been developed by analogy to system identification techniques, where Finite-Memory nonlinear systems, as depicted in Figure 41, are extensively used in establishing a simple relationship between the output and input of complicated nonlinear systems. In the case of a jacket structure exposed to random waves, the input is the surface elevation at a given point and the output is the dynamic response. The justification for using a Finite-memory nonlinear system in modelling the relationship between the output and input of a jacket structure follows. 1. The water particle kinematics at different nodes are calculated from linear wave theory.
This linear process is represented by the first linear system (System A) in Figure 41. 2. The next stage is calculating the Morison forces and then the quasi-static response. This
operation is nonlinear but memoryless. That is, instantaneous values of quasi-static response depend on the values of water particle kinematics at the same instant. This process is represented by the nonlinear system B in Figure 41.
3. The final stage is the calculation of dynamic response from the quasi-static response through a suitable transfer function. This process is represented by linear system C in Figure 41. This stage is quite straightforward as the appropriate transfer function is determined from established procedures in structural mechanics.
The details of the first and second stage of Finite-Memory nonlinear system technique when applied to a jacket structure is shown in Figure 42. In this case the efficient Factor Analysis procedure is used to simulate both the nonlinear quasi-static response (y) and also the linearized quasi-static response (x). The simulated data is then used to establish a relationship between y and x (y = f(x)). Given that the surface elevation is Gaussian, then the linearized quasi-static response, x, will also be Gaussian. The algebraic form of the relationship between y and x will then be used to establish a suitable probability model for the quasi-static response. A trial application of the approach for the simplified problem of no current and no intermittency is

11
demonstrated in Figures 43 and 44. In Figure 43, the relationship between y and x is assumed to be a third order polynomial. That is 3
31 xxy αα += (12)
while in Figure 44, the following model has been used ||21 xxxy αα += (13) Figure 43 shows that Eq. (12) leads to a significant overestimation of the higher values of response. In contrast Figure 44 shows a marked improvement on the accuracy of the higher response values when they are calculated from Eq. (13). It is therefore reasonable to assume that when Eq. (12) is used in establishing the probability distribution of response extreme values (as in Winterstein et al, 1994), the extreme values would be overestimated. In contrast, when Eq. (13) is used in establishing the probability distribution of response extreme values, the response extreme values must be predicted with much better accuracy. This expectation is confirmed by comparing the two extreme value distributions in Figure 45. The approach for the simplified case has been validated and the steps required to extend application to the case of current and intermittency have been outlined. When dynamic effects are important, the efficient short simulation technique can be used to establish the statistical properties of dynamic response. The details of the technique, which uses the relationship y = f(x) derived from the previously-described Finite-Memory nonlinear system technique, are given in Figure 46. 15 - CLOSURE Substantial progress has been made in achieving the objectives of the project, as indicated in the report. The way forward to developing the solutions to the remaining issues has been indicated. ACKNOWLEDGEMENTS The authors wish to extend their gratitude to the project sponsors, the Health and Safety Executive, and in particular to Mr Malcolm Birkinshaw, the Project Officer, and to Dr Navil Shetty & Mr Mark Manzocchi of W.S. Atkins Ltd, Leatherhead office, for their most valued advice in their steering role on the project. REFERENCES Borgman LE (1969) “Ocean wave simulation for engineering design” ASCE, Journal of
Waterways and Harbours Division, Vol 95, No WW4, pp. 557-583. Borgman LE (1977) “Directional wave spectra from wave sensors” in MD Earle and A
Malahoff (Eds) Ocean wave climate. New York: Plenum Press, pp 269-300. Barltrop NDP (1998) “Floating structures, a guide for design and analysis” Herefordshire,
England: Oilfield publications Ltd. Burrows R, Najafian G, Tickell RG, Hearn GE and Metcalfe AV (2001) “Efficient techniques
for risk assessment of space frame platforms exposed to random wave and current loading” Final (technical) report on EPSRC Contract RG/M13725/01, Dept. Civil Eng., University of Liverpool, 35p.
Couch AT and Conte JP (1997) “Field verification of linear and nonlinear hybrid wave models for offshore tower response prediction”. J. Offshore Mechanics and Arctic Engineering, Vol. 119, pp.158-165.
Ditlevsen O and Madsen HO (1996) “Structural Reliability Methods,” New York: John Wiley and Sons.

12
Forristal GZ (1981) “Kinematics of directionally spread waves” Proc Conf On Directional Wave Spectra Applications, University of Berkeley, USA.
Grigoriu M (1993) “On the spectral representation method in simulation,” Probabilistic Engineering Mechanics, Vol 8, No. 2, pp 75-90.
Hedges TS, Burrows R and Mason WG (1979) “Wave-Current interaction and its effect on fluid loading”. Internal Report, Civil Engineering Dept., University of Liverpool.
Hedges TS (1987) “Combinations of waves and currents: an introduction”. Proceeding of Institution of Civil Engineers, Vol. 82, pp. 567-585.
Hedges TS and Lee BW (1992) “The equivalent uniform current in wave-current computations” Coastal Engineering, Vol. 16, pp. 301-311.
Hedges TS, Tickell RG and Akrigg J (1993) “ Interaction of short-crested random waves and large scale currents” Coastal Engineering, Vol. 19, pp. 207-221.
Karunakaran D, Gudmestad DT and Spidsoe N (1992) “Nonlinear Dynamic Response Analysis of Dynamically Sensitive Slender Offshore Structures,” Proc 11th Int Conf on Offshore Mechanics and Arctic Engineering, Calgary, Canada. Vol. 1, No. A, pp. 207-214.
Karunakaran D, Leira BJ and Moan T (1993) “Reliability analysis of drag-dominated offshore structures,” Proc of the 3rd Int Offshore and Polar Engineering Conf, pp 600-605.
Marshall PW and Inglis RB (1986), “Wave kinematics and force coefficients”, ASCE Structures Congress, New Orleans, Louisiana, U.S.A.
Miles MD and Funke ER (1989) “A comparison of methods for synthesis of directional seas,” J of Offshore Mechanics and Arctic Engineering, Vol 111, pp 43-48.
Morison JR, O'Brien MP, Johnson JW and Shaaf SA (1950) “The force exerted by surface waves on piles,” AIME, Petroleum Transactions, Vol 189, pp 149-154.
Morooka CK and Yokoo IH (1997) “Numerical simulation and spectral analysis of irregular sea waves,” Int J of Offshore and Polar Engineering, Vol 7, No. 3, pp 189-196.
Najafian, G, Burrows, R, Tickell, RG, Metcalfe, AV and Hearn, GE (2000). “Pierson-Holmes: A probability distribution for stochastic modelling of wave-induced offshore structural loading and response,” Proc 19th Int Offshore Mechanics and Arctic Engineering Symp, New Orleans, USA, Paper No. OMAE-00-6119, pp 1-8.
Najafian G, Burrows R, Tickell RG and Metcalfe AV (2002) “Efficient derivation of statistical properties of wave-induced quasi-static response of offshore structures through simulation of independent response values” submitted for presentation at 1st Int ASRANET Colloquium, Glasgow, UK.
Pinkster JA (1984) “Numerical modelling of directional seas” Proceedings of the Symposium on Description and Modelling of Directional Seas, No c-1-11. Technical University of Denmark, Copenhegan.
Rice SO (1944,1945). “Mathematical analysis of random noise,” Bell System Technical Engineering Journal, Vols 23 and 24.
Tucker MJ, Carter DJT and Challenor PG (1984). “Numerical simulation of a random sea: a common error and its effect upon wave group statistics,” Applied Ocean Research, Vol 6, pp 118-122.
Vugts JH, Dob SL and Harland LA (1998) “The extreme dynamic response of bottom supported structures using an equivalent quasi-static design wave procedure,” Applied Ocean Research, Vol 20, pp 37-53.
Winterstein SR, Ude TC and Kleiven G (1994). “Springing and slow-drift responses: predicted extremes and fatigue vs. simulation,” BOSS 94, Vol 3, pp 1-15.
Yuxiu Y, Shuxue L and Li L (1991) “Numerical simulation of multi-directional random seas” China Ocean Engineering, Vol 5, No 3, pp 311-320.
13
Table 1: Comparison of the response statistics from time simulation and Factor Analysis procedures for the smooth cylinder cases
Mean Base Shear Statistics
Mean Overturning Moment Statistics
Hs (m)
Current (m/sec)
Simula- tion
Tech-nique
Mean (KN)
S.D. (KN)
Skew- ness
Kurto-sis
Mean (1000KN.m)
S.D. (1000KN.m)
Skewness
Kurtosis
15 -1.5 T.S. F.A.
-351 -351
304 304
-0.667 -0.667
3.81 3.81
-21.7 –21.7
21.5 21.5
-0.477 -0.478
3.69 3.70
15 0 T.S. F.A.
17.5 17.5
196 196
0.835 0.851
6.67 6.87
2.11 2.11
16.3 16.4
1.37 1.40
9.27 9.59
15 +1.5 T.S. F.A.
399 399
372 371
1.44 1.45
6.49 6.63
27.5 27.4
29.8 29.9
1.80 1.82
8.46 8.69
10 -1.5 T.S. F.A.
-315 -314
172 171
-0.399 -0.405
3.24 3.26
–19.4 –19.4
13.1 13.1
-0.340 -0.343
3.20 3.21
10 0 T.S. F.A.
7.31 7.31
103 102
0.408 0.418
4.23 4.28
0.88 0.88
8.84 8.82
0.686 0.688
5.24 5.26
10 +1.5 T.S. F.A.
338 337
201 200
0.961 0.974
4.66 4.70
22.2 22.2
16.7 16.7
1.23 1.24
5.68 5.72
5 -1.5 T.S. F.A.
-294 -294
58.5 58.7
-0.191 -0.192
3.12 3.12
–17.8 –17.8
5.23 5.25
-0.193 -0.186
3.15 3.15
5 -1.0 T.S. F.A.
-134 -134
48.3 48.1
-0.170 -0.179
3.12 3.13
-8.22 -8.21
4.40 4.39
-0.160 -0.165
3.15 3.16
5 -0.5 T.S. F.A.
-36.7 -36.6
40.8 40.4
-0.093 -0.101
3.17 3.17
-2.37 -2.37
3.81 3.79
-0.069 -0.074
3.22 3.22
5 0 T.S. F.A.
2.07 2.06
38.2 37.5
0.120 0.126
3.25 3.28
0.25 0.25
3.61 3.58
0.176 0.181
3.38 3.41
5 +0.5 T.S. F.A.
41.6 41.5
42.3 42.0
0.400 0.419
3.44 3.47
2.96 2.95
4.00 3.99
0.491 0.502
3.64 3.66
5 +1.0 T.S. F.A.
141 141
52.4 52.3
0.470 0.486
3.42 3.45
9.05 9.05
4.91 4.91
0.573 0.584
3.62 3.64
5 +1.5 T.S. F.A.
304 304
66.5 66.5
0.435 0.445
3.30 3.31
18.9 18.9
6.19 6.19
0.532 0.538
3.46 3.47
Notes: The statistics are derived as the mean of 500 simulations where each simulation consists of 65,536 data points S.D.: the standard deviation F.A.: Factor Analysis Technique T.S.: Time Simulation Technique

14
Table 2: Comparison of the response statistics from time simulation and Factor Analysis procedures for the rough cylinder cases
Mean Base Shear Statistics
Mean Overturning Moment Statistics
Hs (m)
Current (m/sec)
Simula- tion
Tech-nique
Mean (KN)
S.D. (KN)
Skew- ness
Kurto-sis
Mean (1000KN.m)
S.D. (1000KN.m)
Skew-ness
Kurtosis
15 -1.5 T.S. F.A.
-653 -651
524 523
-0.886 -0.887
4.15 4.15
-40.3 -40.3
36.5 36.5
-0.730 -0.731
4.04 4.04
15 -1.0 T.S. F.A.
-343 -342
401 400
-0.922 -0.922
5.04 5.01
–21.4 -21.3
29.3 29.3
-0.518 -0.523
5.34 5.33
15 -0.5 T.S. F.A.
-126 -126
312 312
-0.326 -0.324
6.80 6.91
-7.33 -7.31
25.0 25.0
0.481 0.493
8.89 9.12
15 0 T.S. F.A.
32.6 32.6
297 296
1.35 1.37
10.9 11.2
3.92 3.92
25.7 25.7
2.00 2.03
14.4 14.8
15 +0.5 T.S. F.A.
194 193
369 368
2.14 2.15
11.6 11.8
15.5 15.5
31.7 31.6
2.53 2.55
14.8 15.0
15 +1.0 T.S. F.A.
419 418
499 498
1.95 1.96
9.24 9.34
30.6 30.5
41.3 41.2
2.33 2.34
12.0 12.1
15 +1.5 T.S. F.A.
741 740
655 656
1.63 1.64
7.24 7.29
51.0 51.0
52.9 53.0
2.00 2.01
9.46 9.54
10 -1.5 T.S. F.A.
-584 -584
286 286
-0.590 -0.597
3.41 3.43
-36.0 -36.0
21.5 21.5
-0.580 -0.584
3.38 3.40
10 0 T.S. F.A.
13.6 13.6
128 128
0.904 0.931
7.17 7.42
1.64 1.64
11.7 11.7
1.33 1.35
9.10 9.40
10 +1.5 T.S. F.A.
627 627
345 345
1.14 1.15
5.13 5.17
41.2 41.2
28.8 28.9
1.44 1.44
6.38 6.41
5 -1.5 T.S. F.A.
-547 -546
91.1 91.5
-0.336 -0.341
3.22 3.23
-33.0 -33.0
7.96 7.99
-0.379 -0.378
3.30 3.30
5 0 T.S. F.A.
3.86 3.85
37.8 36.9
0.292 0.311
4.02 4.13
0.464 0.462
3.68 3.63
0.417 0.430
4.47 4.55
5 +1.5 T.S. F.A.
565 564
108 108
0.514 0.522
3.42 3.44
35.2 35.2
10.1 10.1
0.620 0.625
3.63 3.65
Notes: The statistics are derived as the mean of 500 simulations where each simulation consists of 65,536 data points S.D.: the standard deviation F.A.: Factor Analysis Technique T.S.: Time Simulation Technique

15
Table 3: Comparison of the response statistics from long-crested and short-crested seas for rough cylinder cases
One-legged structure (Figure 5)
Mean Base Shear Statistics
Mean Overturning Moment Statistics
Hs (m)
Current (m/sec)
Simulation Technique
Mean (KN)
S.D. (KN)
Skew- ness
Kurto-sis
Mean (1000
KN.m)
S.D. (1000
KN.m)
Skew-ness
Kurto- sis
15 -1.5 T.S. (long-crested) F.A. (long-crested) F.A. (short-crested)
-217 -217 -213
182 182 162
-0.874 -0.876 -0.789
4.18 4.20 3.92
-13.4 -13.4 -13.2
12.9 12.9 11.5
-0.665 -0.663 -0.613
4.18 4.22 3.89
15 -1.0 T.S. (long-crested) F.A. (long-crested) F.A. (short-crested)
-114 -114 -111
140 140 124
-0.859 -0.861 -0.798
5.16 5.21 4.76
-7.12 -7.12 -6.97
10.4 10.5 9.23
-0.348 -0.339 -0.365
6.01 6.13 5.40
15 -0.5 T.S. (long-crested) F.A. (long-crested) F.A. (short-crested)
-42.0 -42.1 -40.4
111 111 96.0
-0.132 -0.132 -0.163
7.72 7.76 6.94
-2.44 -2.44 -2.43
9.07 9.09 7.88
0.857 0.861 0.725
11.5 11.6 10.2
15 0 T.S. (long-crested) F.A. (long-crested) F.A. (short-crested)
10.8 10.8 9.38
107 107 91.3
1.62 1.64 1.56
13.0 13.2 12.2
1.31 1.31 1.13
9.46 9.47 8.15
2.42 2.44 2.30
18.4 18.7 17.2
15 +0.5 T.S. (long-crested) F.A. (long-crested) F.A. (short-crested)
64.7 64.7 60.1
132 132 115
2.36 2.37 2.26
13.7 13.7 12.8
5.17 5.17 4.79
11.6 11.6 10.1
2.88 2.88 2.75
18.4 18.3 17.0
15 +1.0 T.S. (long-crested) F.A. (long-crested) F.A. (short-crested)
140 140 133
177 177 156
2.12 2.13 2.01
10.5 10.7 9.85
10.2 10.2 9.65
15.0 15.0 13.3
2.59 2.62 2.48
14.3 14.7 13.4
15 +1.5 T.S. (long-crested) F.A. (long-crested) F.A. (short-crested)
247 247 240
232 232 207
1.79 1.78 1.68
8.21 8.22 7.64
17.0 17.0 16.4
19.1 19.1 17.1
2.25 2.25 2.12
11.4 11.4 10.5
Notes: The statistics are derived as the mean of 500 simulations where each simulation consists of 65,536 data points S.D.: the standard deviation F.A.: Factor Analysis Technique T.S.: Time Simulation Technique

16
0 0.05 0.1 0.15 0.2 0.25 0
50
100
150
200
250
300
350
400
450
500
Frequency (Hz)
Sur
face
ele
vatio
n fr
eque
ncy
spec
trum
Spectrum for observer moving with current Spectrum for stationary observer
Figure 1: Effect of positive current (1.5 m/sec) on frequency spectrum (Hs = 15m)
0 0.05 0.1 0.15 0.2 0.25 0
50
100
150
200
250
300
350
400
450
500
Frequency (Hz)
Sur
face
ele
vatio
n fr
eque
ncy
spec
trum
Spectrum for observer moving with current Spectrum for stationary observer
Figure 2: Effect of negative current (-1.5 m/sec) on frequency spectrum (Hs = 15m)
17
Figure 3: Main test structure

18
Figure 4: Second test structure in deeper water

19
Figure 5: Test structure for directional seas

20
Define the frequency
spectrum fora stationaryobserver
Simulate surface elevation at a givenpoint for a given
period of time as a realisation of a
Gaussian randomprocess
Calculatewater particle
kinematics and surface elevationat different nodes from linear wave
theory
CalculateMorison loads at
each node accountingfor intermittency
Calculate quasi-staticresponse as a linearcombination of all
the nodal loads
Calculate dynamic response
Are dynamic effects
important
Calculate the statistical propertiesof response such as its first four
statistical moments, its probability distribution and its extreme values
No
Yes
I < 500
No
Plot the probabilitydistribution of extreme
values on a Gumbel paper
I = I + 1
I = 1
Calculate the average valueof the first four statistical
moments of response from all the simulations
Stop
Figure 6: Flow chart for Time Simulation procedure
Start
Yes

21
Define the frequency
spectrum fora stationary
observer
Use linear wave theory to calculatethe matrix of cross-
covariances between water particle
kinematics and surface elevation at
different nodes
Calculate the eigenvalues and the eigenvectors of the foregoing
matrix
Determine all the important eigenvalues
and their associatedeigenvectors and ignore
the rest of them
Simulate water particlekinematics and surface
elevation at each node asa linear combination of
eigenvectors' components.
Simulate 1,000,000independent data points
for each kinematic
Are dynamic effects
important
Calculate the statistical properties of quasi-
static response such as its first fourstatistical moments and its theoretical Pierson-Holmes
probability distribution
Establish the probability distribution of response
extreme values from Najafian’s Extreme Value
probability distribution and compare it with the
probability distribution of extreme values from
time simulation
Stop
CalculateMorison loads at each node accounting
for intermittency
Calculate quasi-static
response as a linear
combination of all
the nodal loads
Calculate the statistical properties of dynamicresponse such as its first four statistical moments and its
theoretical Pierson-Holmes probability distributionfrom Dynamic Excess
Kurtosis technique
Figure 7: Flow chart for Factor Analysis procedure
Start
Yes
No

22
0 2 4 6 8 10 0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Eigenvalues from largest to smallest
Importance of successive eigenvalues
Run
ning
sum
of n
orm
aliz
ed e
igen
valu
es
Figure 8: The relative importance of successive eigenvalues for Hs=5m
0 2 4 6 8 10 0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Eigenvalues from largest to smallest
Importance of successive eigenvalues
Run
ning
sum
of n
orm
aliz
ed e
igen
valu
es
Figure 9: The relative importance of successive eigenvalues for Hs=10m

23
0 2 4 6 8 10 0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Eigenvalues from largest to smallest
Run
ning
sum
of n
orm
aliz
ed e
igen
valu
es
Figure 10: The relative importance of successive eigenvalues for Hs=15m
-100 -50 0 50 100 0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Angle from predominant wave direction in degrees
The
spr
eadi
ng fu
nctio
n
Figure 11: The spread function used for directional seas

24
0 200 400 600 800 1000 -2500
-2000
-1500
-1000
-500
0
500
1000
1500
2000
Data point number
Factor Analysis Technique; Hs=15m, current = 0 m/sec, Rough cylinder case
One
thou
sand
sim
ulat
ed d
ata
poin
ts fo
r qu
asi-s
tatic
bas
e sh
ear
Figure 12: Successive data points generated by Factor Analysis technique
are independent from each other
0 200 400 600 800 1000 -2500
-2000
-1500
-1000
-500
0
500
1000
1500
2000
Data point number
Time Simulation Technique; Hs=15m, current = 0 m/sec, Rough cylinder case
One
thou
sand
sim
ulat
ed d
ata
poin
ts fo
r qu
asi-s
tatic
bas
e sh
ear
Figure 13: Successive data points generated by Time Simulation technique are correlated

25
0.8 0.9 1 1.1 1.2 0.8
0.85
0.9
0.95
1
1.05
1.1
1.15
1.2
1.25
1.3
Standardized skewness of quasi-static base shear
Factor Analysis Technique; Hs=15m, current = -1.50 m/sec, Rough cylinder case
Sta
ndar
dize
d ku
rtos
is o
f qua
si-s
tatic
bas
e sh
ear
Figure 14: Sampling variability of skewness and kurtosis of quasi-static base shear from Factor Analysis Technique
0.8 0.9 1 1.1 1.2 0.8
0.85
0.9
0.95
1
1.05
1.1
1.15
1.2
1.25
1.3
Standardized skewness of quasi-static base shear
Time Simulation Technique; Hs=15m, current = -1.50 m/sec, Rough cylinder case
Sta
ndar
dize
d ku
rtos
is o
f qua
si-s
tatic
bas
e sh
ear
Figure 15: Sampling variability of skewness and kurtosis of quasi-static base shear
from Time Simulation technique

26
0.8 0.9 1 1.1 1.2 1.3 1.4 0.8
0.9
1
1.1
1.2
1.3
1.4
standardized skewness of quasi-static response
Factor Analysis Technique, Hs = 5m, current = 1.0 m/sec; smooth cylinder case
stan
dard
ized
kur
tosi
s of
qua
si-s
tatic
res
pons
e
Figure 16: Sampling variability of skewness and kurtosis of quasi-static base shear
from Factor Analysis Technique
0.8 0.9 1 1.1 1.2 1.3 1.4 0.8
0.9
1
1.1
1.2
1.3
1.4
standardized skewness of quasi-static response
Time Simulation Technique, Hs = 5m, current = 1.0 m/sec; smooth cylinder case
stan
dard
ized
kur
tosi
s of
qua
si-s
tatic
res
pons
e
Figure 17: Sampling variability of skewness and kurtosis of quasi-static base shear
from Time Simulation technique

27
0 100 200 300 400 500 -3.5
-3
-2.5
-2
-1.5
-1
-0.5
Quasi-static base shear simulation number
Factor Analysis Technique; Hs=15m, current = -1.50 m/sec, Rough cylinder case
The
ske
wne
ss p
aram
eter
in P
iers
on-H
olm
es d
istr
ibut
ion
Figure 18: Sampling variability of skewness parameter of quasi-static base shear
from Factor Analysis technique
0 100 200 300 400 500 -3.5
-3
-2.5
-2
-1.5
-1
-0.5
Quasi-static base shear simulation number
Time Simulation Technique; Hs=15m, current = -1.50 m/sec, Rough cylinder case
The
ske
wne
ss p
aram
eter
in P
iers
on-H
olm
es d
istr
ibut
ion
Figure 19: Sampling variability of skewness parameter of quasi-static base shear
from Time Simulation technique

28
0 100 200 300 400 500 3
4
5
6
7
8
9
Quasi-static base shear simulation number
Factor Analysis Technique; Hs=15m, current = 0.00 m/sec, Rough cylinder case
The
ske
wne
ss p
aram
eter
in P
iers
on-H
olm
es d
istr
ibut
ion
Figure 20: Sampling variability of skewness parameter of quasi-static base shear
from Factor Analysis technique
0 100 200 300 400 500 3
4
5
6
7
8
9
Quasi-static base shear simulation number
Time Simulation Technique; Hs=15m, current = 0.00 m/sec, Rough cylinder case
The
ske
wne
ss p
aram
eter
in P
iers
on-H
olm
es d
istr
ibut
ion
Figure 21: Sampling variability of skewness parameter of quasi-static base shear
from Time Simulation technique

29
0 100 200 300 400 500 1.4
1.6
1.8
2
2.2
2.4
2.6
2.8
3
3.2
3.4
Quasi-static base shear simulation number
Factor Analysis Technique; Hs=15m, current = +1.50 m/sec, Rough cylinder case
The
ske
wne
ss p
aram
eter
in P
iers
on-H
olm
es d
istr
ibut
ion
Figure 22: Sampling variability of skewness parameter of quasi-static base shear
from Factor Analysis technique
0 100 200 300 400 500 1.4
1.6
1.8
2
2.2
2.4
2.6
2.8
3
3.2
3.4
Quasi-static base shear simulation number
Time Simulation Technique; Hs=15m, current = +1.50 m/sec, Rough cylinder case
The
ske
wne
ss p
aram
eter
in P
iers
on-H
olm
es d
istr
ibut
ion
Figure 23: Sampling variability of skewness parameter of quasi-static base shear
from Time Simulation technique

30
0.0001 0.01 0.1 1 5 20 50 80 95 99 99.9 99.9999
-10
-5
0
5
10
Percentage less than
valu
es o
f the
nor
mal
ised
sig
nal
mean = -2.57e+004 Stnd dev. = 3.38e+004 skewness = -1.55 kurtosis = 7.25 maximum = 7.02 minimum = -11.8
Gaussian distribution Simulated data Pierson-Holmes distribution
Figure 24: Probability distribution of quasi-static overturning moment in comparison with the
theoretical Pierson-Holmes distribution. Hs=15m, rough cylinder case, no-intermittency, current = -1.0 m/sec
0.0001 0.01 0.1 1 5 20 50 80 95 99 99.9 99.9999
-10
-5
0
5
10
Percentage less than
valu
es o
f the
nor
mal
ised
sig
nal
mean = 2.58e+004 Stnd dev. = 3.38e+004 skewness = 1.55 kurtosis = 7.25 maximum = 12.8 minimum = -6.05
Gaussian distribution Simulated data Pierson-Holmes distribution
Figure 25: Probability distribution of quasi-static overturning moment in comparison with the
theoretical Pierson-Holmes distribution. Hs=15m, rough cylinder case, no-intermittency, current = +1.0 m/sec

31
0.0001 0.01 0.1 1 5 20 50 80 95 99 99.9 99.9999
-10
-5
0
5
10
Percentage less than
valu
es o
f the
nor
mal
ised
sig
nal
mean = 32.6 Stnd dev. = 298 skewness = 1.36 kurtosis = 10.8 maximum = 13.1 minimum = -6.19
Gaussian distribution Simulated data Pierson-Holmes distribution
Figure 26: Probability distribution of quasi-static base shear in comparison with the theoretical
Pierson-Holmes distribution. Hs=15m, rough cylinder case, load intermittency incorporated, current = 0.0.
99.9 90 50 20 5 1 0.1 0.01 0.001 0
1000
2000
3000
4000
5000
6000
7000
8000
9000
Percentage exceeding
Solid line: Largest extreme value; Broken: - smallest extreme value
Qua
si-s
tatic
bas
e sh
ear
extr
eme
valu
es
Figure 27: Probability distribution of the extreme values of quasi-static base shear.
Symbols ‘o’ and ‘*’ stand for the larger and minus smaller extreme values, respectively while solid and dashed lines are the Gumbel distributions fitted to the larger and minus smaller extreme values,
respectively. Hs=15m, rough cylinder case, load intermittency incorporated, current = 0.0.

32
0.0001 0.01 0.1 1 5 20 50 80 95 99 99.9 99.9999
-10
-8
-6
-4
-2
0
2
4
6
8
10
Percentage less than
valu
es o
f the
nor
mal
ised
sig
nal
mean = 738 Stnd dev. = 650 skewness = 1.65 kurtosis = 7.4 maximum = 10.3 minimum = -2.23
Gaussian distribution Simulated data Pierson-Holmes distribution
Figure 28: Probability distribution of quasi-static base shear in comparison with the theoretical
Pierson-Holmes distribution. Hs=15m, rough cylinder case, load intermittency incorporated, current = 1.5m/sec.
99.9 90 50 20 5 1 0.1 0.01 0.001 0
2000
4000
6000
8000
10000
12000
14000
Percentage exceeding
Solid line: Largest extreme value; Broken: - smallest extreme value
Qua
si-s
tatic
bas
e sh
ear
extr
eme
valu
es
Figure 29: Probability distribution of the extreme values of quasi-static base shear.
Symbols ‘o’ and ‘*’ stand for the larger and minus smaller extreme values, respectively while solid and dashed lines are the Gumbel distributions fitted to the larger and minus smaller extreme values,
respectively. Hs=15m, rough cylinder case, load intermittency incorporated, current = 1.5m/sec.

33
0.0001 0.01 0.1 1 5 20 50 80 95 99 99.9 99.9999 -8
-6
-4
-2
0
2
4
6
8
Percentage less than
valu
es o
f the
nor
mal
ised
sig
nal
mean = -652 Stnd dev. = 523 skewness = -0.889 kurtosis = 4.14 maximum = 5.37 minimum = -6.78
Gaussian distribution Simulated data Pierson-Holmes distribution
Figure 30: Probability distribution of quasi-static base shear in comparison with the theoretical
Pierson-Holmes distribution. Hs=15m, rough cylinder case, load intermittency incorporated, current = -1.5m/sec.
99.9 90 50 20 5 1 0.1 0.01 0.001 0
1000
2000
3000
4000
5000
6000
7000
Percentage exceeding
Solid line: Largest extreme value; Broken: - smallest extreme value
Qua
si-s
tatic
bas
e sh
ear
extr
eme
valu
es
Figure 31: Probability distribution of the extreme values of quasi-static base shear.
Symbols ‘o’ and ‘*’ stand for the larger and minus smaller extreme values, respectively while solid and dashed lines are the Gumbel distributions fitted to the larger and minus smaller extreme values,
respectively. Hs=15m, rough cylinder case, load intermittency incorporated, current = -1.5m/sec.

34
0.0001 0.01 0.1 1 5 20 50 80 95 99 99.9 99.9999
-8
-6
-4
-2
0
2
4
6
8
Percentage less than
valu
es o
f the
nor
mal
ised
sig
nal
mean = -4.03e+004 Stnd dev. = 3.64e+004 skewness = -0.73 kurtosis = 4.03 maximum = 8.12 minimum = -6.43
Gaussian distribution Simulated data Pierson-Holmes distribution
Figure 32: Probability distribution of quasi-static overturning moment in comparison with the
theoretical Pierson-Holmes distribution. Hs=15m, rough cylinder case, load intermittency incorporated, current = -1.5m/sec.
99.9 90 50 20 5 1 0.1 0.01 0.001 0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5 x 10 5
Percentage exceeding
Qua
si-s
tatic
ove
rtur
ning
mom
ent e
xtre
me
valu
es
Figure 33: Probability distribution of extreme values of quasi-static overturning moment.
Symbols ‘o’ and ‘*’ stand for the larger and minus smaller extreme values, respectively while solid and dashed lines are the Gumbel distributions fitted to the larger and minus smaller extreme values,
respectively. Hs=15m, rough cylinder case, load intermittency incorporated, current = -1.5m/sec.

35
0.0001 0.01 0.1 1 5 20 50 80 95 99 99.9 99.9999
-8
-6
-4
-2
0
2
4
6
8
Percentage less than
valu
es o
f the
nor
mal
ised
sig
nal
mean = -4.03e+004 Stnd dev. = 4.65e+004 skewness = -0.601 kurtosis = 3.97 maximum = 7.23 minimum = -8.12
normalised dynamic overturning moment
Gaussian distribution Simulated data Pierson-Holmes distribution
Figure 34: Probability distribution of dynamic overturning moment in comparison with the theoretical
Pierson-Holmes distribution. Hs=15m, rough cylinder case, load intermittency incorporated, current = -1.5m/sec.
99.9 90 50 20 5 1 0.1 0.01 0.001 0
1
2
3
4
5
6
7 x 10 5
Percentage exceeding
Dyn
amic
ove
rtur
ning
mom
ent e
xtre
me
valu
es
Figure 35: Probability distribution of the extreme values of dynamic overturning moment.
Symbols ‘o’ and ‘*’ stand for the larger and minus smaller extreme values, respectively while solid and dashed lines are the Gumbel distributions fitted to the larger and minus smaller extreme values,
respectively. Hs=15m, rough cylinder case, load intermittency incorporated, current = -1.5m/sec.

36
0.0001 0.01 0.1 1 5 20 50 80 95 99 99.9 99.9999 -8
-6
-4
-2
0
2
4
6
8
Percentage less than
valu
es o
f the
nor
mal
ised
sig
nal
mean = -1.22e+003 Stnd dev. = 574 skewness = -0.673 kurtosis = 3.7 maximum = 4.74 minimum = -6.65
Gaussian distribution Simulated data Pierson-Holmes distribution
Figure 36: Probability distribution of quasi-static base shear in comparison with the theoretical
Pierson-Holmes distribution. Hs=15m, rough cylinder case, load intermittency incorporated, current = -1.5m/sec.,
water depth =250m

37
0.0001 0.01 0.1 1 5 20 50 80 95 99 99.9 99.9999 -15
-10
-5
0
5
10
15
Percentage less than
valu
es o
f the
nor
mal
ised
sig
nals
o: No Intermittecy +: Intermittecy skewness -1.34 -0.32 kurtosis 7.95 6.9 maximum 9.27 13.9 minimum -12.4 -8.6
Quasi-static base shear; Hs=15m, Rough cylinders, Current = -0.50 m/sec
Figure 37: The effect of load intermittency on the probability distribution of quasi-static base shear.
(Hs=15m, rough cylinder case, current = -0.50 m/sec) (+: response distribution with intermittent loading; o: response distribution with no intermittency;
*: the difference between the two distributions)
0.0001 0.01 0.1 1 5 20 50 80 95 99 99.9 99.9999
-15
-10
-5
0
5
10
15
Percentage less than
valu
es o
f the
nor
mal
ised
sig
nals
o: No Intermittecy +: Intermittecy skewness 0.00465 1.38 kurtosis 8.22 11.2 maximum 12.9 17.4 minimum -11.8 -7.31
Quasi-static base shear; Hs=15m, Rough cylinders, Current = 0 m/sec
Figure 38: The effect of load intermittency on the probability distribution of quasi-static base shear.
(Hs=15m, rough cylinder case, current = 0 m/sec) (+: response distribution with intermittent loading; o: response distribution with no intermittency;
*: the difference between the two distributions)

38
0.0001 0.01 0.1 1 5 20 50 80 95 99 99.9 99.9999
-15
-10
-5
0
5
10
15
Percentage less than
valu
es o
f the
nor
mal
ised
sig
nals
o: No Intermittecy +: Intermittecy skewness 1.55 2.33 kurtosis 7.25 12.1 maximum 12.8 18.1 minimum -6.05 -2.79
Quasi-static overturning moment; Hs=15m, Rough cylinders, Current = 1.00 m/sec
Figure 39: The effect of load intermittency on the probability distribution of quasi-static overturning
moment Hs=15m, rough cylinder case, current = 1.00 m/sec
(+: response distribution with intermittent loading; o: response distribution with no intermittency; *: the difference between the two distributions)

39
0 2 4 6 8 10 0
1
2
3
4
5
6
7
8
9
10
Accurate value of dynamic response kurtosis
Dyn
amic
res
pons
e ku
rtos
is p
redi
cted
from
exc
ess
kurt
osis
pro
cedu
re
Base shear Overturning moment
Figure 40: The level of the accuracy of the Dynamic Excess Kurtosis technique

40
F igure 41 : T h e s tructure o f F inite-M e m o r y N o n l i n e a r S y s t e m u sed in sys tem ident i f i cat ion techniques
L inearS y stem
A
Z e ro-m e m o r y n o n linear sys tem
B
L inearS y stem
Cx(t)
u(t) v(t)y(t)
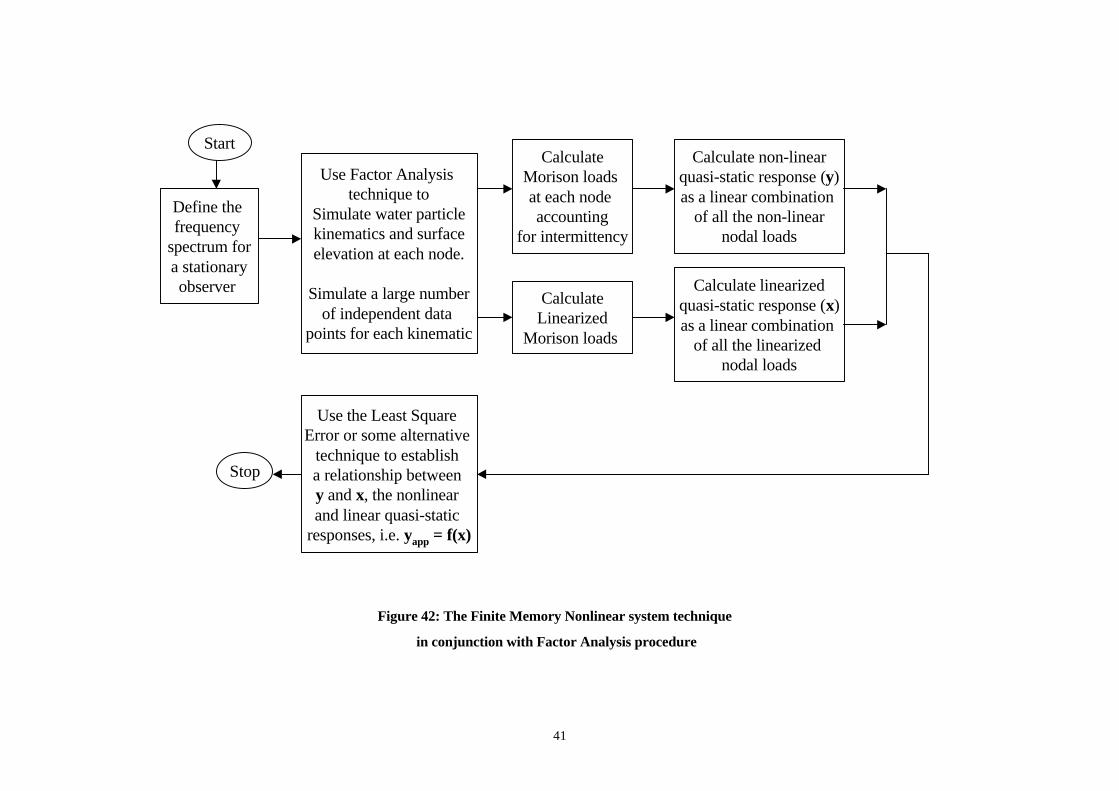
41
Define the frequency
spectrum fora stationaryobserver
Use Factor Analysis technique to
Simulate water particlekinematics and surfaceelevation at each node.
Simulate a large numberof independent data
points for each kinematic
Use the Least Square Error or some alternative
technique to establish a relationship between y and x, the nonlinear and linear quasi-static
responses, i.e. yapp = f(x)
Stop
CalculateMorison loads at each node accounting
for intermittency
Calculate non-linearquasi-static response (y)as a linear combination
of all the non-linearnodal loads
Figure 42: The Finite Memory Nonlinear system technique
in conjunction with Factor Analysis procedure
Start
CalculateLinearized
Morison loads
Calculate linearized quasi-static response (x) as a linear combination
of all the linearized nodal loads

42
Figure 43: The level of accuracy of the nonlinear drag-only response predicted as a third order polynomial of the linearized response; no current, no intermittency
Figure 44: The level of accuracy of the nonlinear drag-only response predicted as a second order function of the linearized response; no current, no intermittency
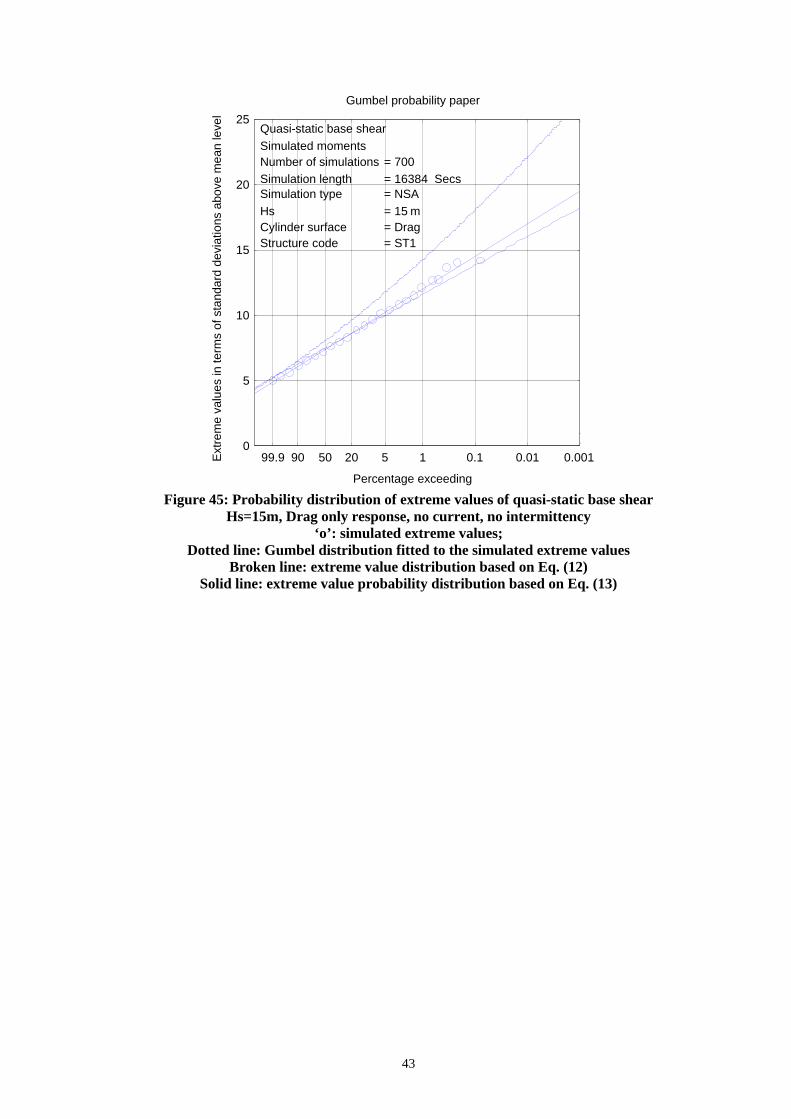
43
99.9 90 50 20 5 1 0.1 0.01 0.001 0
5
10
15
20
25
Percentage exceeding
Gumbel probability paper
Ext
rem
e va
lues
in te
rms
of s
tand
ard
devi
atio
ns a
bove
mea
n le
vel
Quasi-static base shear Simulated moments Number of simulations = 700 Simulation length = 16384 Secs Simulation type = NSA Hs = 15 m Cylinder surface = Drag Structure code = ST1
Figure 45: Probability distribution of extreme values of quasi-static base shear
Hs=15m, Drag only response, no current, no intermittency ‘o’: simulated extreme values;
Dotted line: Gumbel distribution fitted to the simulated extreme values Broken line: extreme value distribution based on Eq. (12)
Solid line: extreme value probability distribution based on Eq. (13)
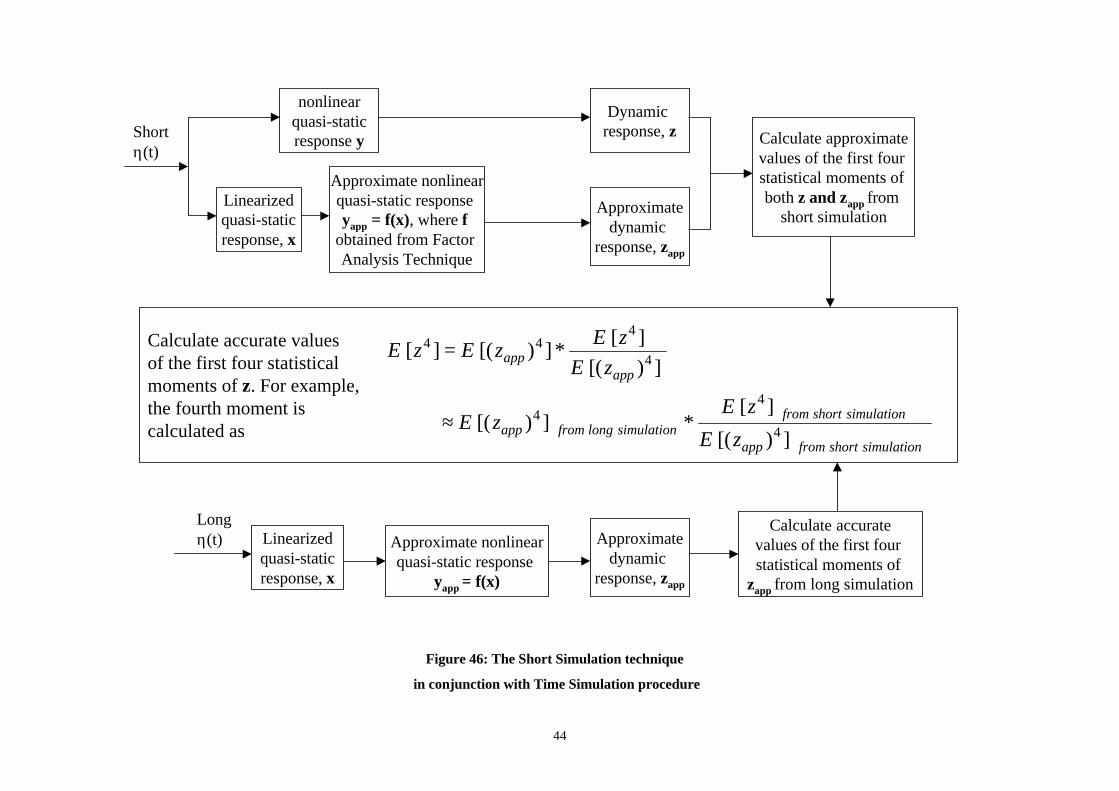
44
Figure 46: The Short Simulation technique
in conjunction with Time Simulation procedure
Shortη(t)
Linearizedquasi-staticresponse, x
Approximate nonlinearquasi-static response yapp = f(x), where f
obtained from Factor Analysis Technique
nonlinearquasi-staticresponse y
Dynamic response, z
Approximatedynamic
response, zapp
Calculate approximatevalues of the first four statistical moments of both z and zapp from
short simulation
Linearizedquasi-staticresponse, x
Approximate nonlinearquasi-static response
yapp = f(x)
Approximatedynamic
response, zapp
Longη(t)
Calculate accuratevalues of the first four statistical moments of
zapp from long simulation
Calculate accurate values of the first four statisticalmoments of z. For example,the fourth moment is calculated as
simulationshortfromapp
simulationshortfromsimulationlongfromapp
appapp
zE
zEzE
zEzE
zEzE
])([
][*])([
])([][
*])([][
4
44
4
444
≈
=

45
APPENDIX A THE EFFECT OF CURRENT ON THE FREQUENCY SPECTRUM
ωc : refers to the angular frequency of a wave component as observed by an observer in a frame
of reference moving with the current. ωs : refers to the angular frequency of a wave component as observed by an observer in a
stationary frame of reference. Assume that waves are generated on a current and that the current is steady and uniform and that it does not vary in the horizontal plane. Then the surface elevation frequency spectrum as observed in the moving frame of reference will be similar to the case when the frequency spectrum is generated in a no-current region and is observed by a stationary observer if their significant wave height is the same.
( )ccG ωηη
)( and ( )ssG ωηη)( denote the frequency spectrum, as observed by the moving and
stationary observers, respectively. It is intended to establish the relationship between the two. The relationship between ωc and ωs is
)(tanh dkkg
uk
c
sc
=
−=
ω
ωω (1)
where k is the wave number of the wave component whose angular frequencies in the moving and stationary frames of reference are denoted by ωc and ωs, respectively. According to Eq. (1), the relationship between k and ωc can be written as
g
dkkkf c2
)(tanh)(ω
== (2)
For deep water condition, tanh(kd) ≈ 1 and hence from Eq. (2), k is equal to
g
k c2ω
= (3)
Replacing for k in Eq. (1), leads to the following relationship between ωc and ωs for deep-water condition
02 =−+
sccg
uωωω (4)
The forgoing equation for positive and negative currents can be written as
00
00
2
2
<=−+
−
>=−+
ugu
ugu
scc
scc
ωωω
ωωω
(5)
The above quadratic equations can be solved to find an explicit relationship between ωc and ωs, that is

46
02
411
02
411
<−+
=
>+±−
=
u
gu
gu
u
gu
gu
s
c
s
c
ωω
ωω
m
(6)
The expression under the square root must be positive; therefore,
04
04
0041
0041
<≤
>−
≥
<≥−
>≥+
uug
uug
or
ugu
ug
u
s
s
s
s
ω
ω
ω
ω
(7)
On the other hand, ωc is always positive; therefore the first equation in (6) must have the
positive sign before the square root and also 00141 >≥−+ ugu
sω , which implies
that ωs would always be positive for the case of positive current. For negative current, ωc is always positive when the sign before the square root in (6) is positive. When the sign before the square root is negative, The following relationship must hold,
00
0141
<≥
<≤−
uor
ugu
s
s
ω
ω
(8)
According to Eq. (5), the relationship between ωs and ωc for negative current is
02 <+
−= u
gu
ccs ωωω (9)
Therefore, ωs is equal to zero when ωc = 0 or ug
c =ω . The maximum value of ωs, (ωs)max, is
obtained when the first derivative of ωs with respect to ωc is set equal to zero. As a result,

47
ug
at
ug
c
s
2ˆ
4)( max
=
=
ω
ω
(10)
Note that when current is negative, for each ωs value in the rangeug
s 40 pp ω , there are two
different ωc values, one smaller and one larger than cω̂ . The group velocity at cω̂ in the
moving frame of reference is uug
cc
g −===ω̂2
; that is, the group velocity with respect to
the current is equal to the current, but of opposite direction. Therefore the group velocity at
cω̂ for the stationary observer is equal to zero. As a result waves with frequencies greater than
cω̂ will never reach the stationary observer. In other words, only waves with frequencies in
the range ug
c 20 pp ω are of practical significance for negative currents. Consequently in the
case of negative currents, the sign before the square root in Eq. (6), must be negative. If we
choose the positive sign before the square root, then ug
c 2>ω and hence their corresponding
group velocity will be less that the absolute value of the current. That is
uug
cc
g −=<=ω2
. Therefore the acceptable relationships between ωc and ωs for both
positive and negative currents are
02
411
02
411
<−−+
=
>++−
=
u
gu
gu
u
gu
gu
s
c
s
c
ωω
ωω
(11)
The above equation can be summarised as
−+=
++−= 141
22
411
s
s
c gu
ug
gu
gu
ωω
ω (12)
For positive current ωc and ωs can be any positive numbers while for negative current they will
satisfyug
c 20 pp ω and
ug
s 40 pp ω (refer to Figures A.1 and A.2).
From Eq. (12), the first derivative of ωc with respect to ωs is

48
s
s
c
gu
gu
ωε
εω
ω
41
1
41
1
+=
=+
=′
(13)
Combining Eqs. (12) and (13), the relationship between ωc and ωs can be written as
ε
ωω
+=
12 s
c (14)
Now assume that the surface elevation frequency spectrum for the stationary observer at a given frequency ωs is ( )s
sG ωηη)( . It is intended to calculate the frequency spectrum for the observer
moving with the current at the equivalent frequency ε
ωω
+=
12 s
c . This can be achieved by
considering a small frequency interval dωs around ωs and a small frequency interval dωc around ωc, then the following relationships hold,
( ) ( )
( ) ( )
( ) ( )
( ) ( )
( )
+
==
+=+
==′
′=
′=
′=
′=
=
εω
ωε
ω
ωεε
ωω
εω
ωωωωω
ωωωωωωω
ωωωωωωω
ωωω
ωωωω
ηηηη
ηηηη
ηηηη
ηηηη
ηηηη
121
,
41;12
;1
,),14()13(.
;)(.)(
)(.)(
,
)(.)(
,
,
)()(
)()(
)()(
)()(
)()(
sc
cs
s
ss
cc
scc
scss
sscscc
sss
sscscc
ccc
scc
ccc
sss
GG
conditionswaterdeepforTherefore
gu
validareipsrelationshfollowingtheconditionswaterdeepforandEqstoAccording
depthswaterallforvalidGG
or
dGdG
Therefore
dGdG
Thereforedd
but
dGdG
(15)
Therefore,
( ) ( ) ( )
( )( ) bd
ac
dGdGdG
sc
sc
b
acc
cd
cssc
csc
d
css
s
====
=′= ∫∫∫
ωωωω
ωωωωωωωωω ηηηηηη)()()( )(.)(
(16)

49
Therefore, ( ) baG ccc ≤≤ ωωηη
)( , as observed by the moving observer, is seen as the
following frequency spectrum by the stationary observer
( ) ( ) ( )( )( )( )
( )
( )( ) bd
ac
gu
dcGG
toreducewillequationabovetheconditionswaterdeepFor
bdac
dcGG
sc
sc
s
ss
cc
ss
sc
sc
sscc
scss
====
+=
≤≤
+
==
====
≤≤′=
ωωωω
ωε
ωε
ωω
εω
ωωωω
ωωωωωω
ηηηη
ηηηη
41
121
,
*
)()(
)()(
(17)
Therefore, in deep water cases, ωc and ωs can be any positive numbers when the current is positive. In the case of negative currents, they should satisfy the following two
relationships:ug
c 20 pp ω and
ug
s 40 pp ω . The relationships between ωc and ωs for
negative and positive currents, are presented in Figures A.1 and A.2, respectively. For shallow-water condition, tanh(kd) ≈ kd and hence from Eq. (2), k is equal to
dgc
dgTL
dgk c
=
=
=ω
(18)
Replacing the above equation into Eq. (1) leads to
dgu
dgcoefd
d
dgu
coef
coef
s
c
sc
+==
+=
=
1
1
ωω
ωω
(19)
For a depth of 120m, and a current of –1.5m/s

50
equationswatershallowFromdd
coef
s
c
sc
−=
==
046.1
046.1956.0
ωω
ωω (20)
while using the deep-water equations at very low frequencies,
equationswaterdeepFrom
dd
s
c
sc
−=
=
1ωω
ωω (21)
It is therefore more appropriate to use the general equations to avoid approximations. To summarise, assuming that ( ) baG cc
c ≤≤ ωωηη)( is known, it is intended to calculate
( ) dcG sss ≤≤ ωωηη)( . According to equation (15), it is necessary to calculate both
cc and ωω ′ as functions of ωs. There are closed-form solutions for the special cases of deep-water and shallow-water conditions. But for the general case numerical techniques must be applied as follows: 1. Determine the lower and upper limits of ωc. That is, ba c ≤≤ ω . Waves with frequencies
out of this range are assumed to be insignificant. Then divide this interval into a number of equal sub-intervals and define a number of equidistant ωc values. Define ( )c
cG ωηη)( at these
cω values. 2. Calculate wave number kc for each ωc value from Eq. (2) using an appropriate numerical
technique. Also calculate sinh(kc.d) for wave components which are not in deep water, where d is the water depth. This is calculated in program wave_number2.m. These values will be applicable to the case where the current is negligible. In that case, the following steps are redundant.
3. Determine the corresponding (equivalent) ωs-eq value for each ωc value from Eq. (1). That is ukcceqs +=− ωω . Therefore, the wave number kc is associated with both ωc and their
corresponding ωs-eq values.
4. Note that the resultant ωs-eq values are not equidistant. Therefore determine the lower and upper limits of ωs-eq, that is, dc eqs ≤≤ −ω . Then divide the interval into a number of equal
sub-intervals and define a number of equidistant ωs values.
5. Calculate the wave number ks for each new ωs value by interpolation given that ωs-eq and their associated wave numbers, kc, have previously been calculated.
6. Calculate the corresponding (equivalent) ωc-eq value for each new ωs value from Eq. (1). That is uksseqc −=− ωω . Thus, ks values are associated with both equidistant ωs values
and their corresponding ωc-eq values. (The relationship between ωs and ωc for negative and positive currents are demonstrated in Figures A.3 and A.4, respectively).
7. Determine ( )eqccG −ωηη
)( by interpolation given that ωc and ( )ccG ωηη
)( are known.

51
8. Determine s
eqc
d
d
ω
ω − for each ωs value by an appropriate numerical technique. The variation
of this derivative with ωs for both negative and positive currents are demonstrated in Figures A.5 and A.6, respectively.
9. Calculate ( )ssG ωηη)( from Eq. (17). That is
( ) ( ) dcGd
dG seqc
c
s
eqcs
s ≤≤= −− ωω
ω
ωω ηηηη
)()( * . This is calculated in program
stationary_spectrum2.m. Also calculate sinh(ks.d) for those wave components which are not in deep water, where d is the water depth, in the same program. These values will replace sinh(kc.d), which were previously calculated in wave_number2.m and were only applicable to the case where the current was negligible.
10. Now that ( ) dcG sss ≤≤ ωωηη)( is known, the surface elevation at a given point can be
simulated from this spectrum, as previously described.
11. For all ωs values, their corresponding ωc-eq and ks values have already been calculated; therefore, water particle kinematics at any point can be simulated. The transfer functions for horizontal water particle velocity and acceleration at point (x2, z2), when the surface elevation is defined at point x1, are
( )( )
( )( ) ( )ϕωω
ϕ
ϕωω
∆−−−=
−=∆
∆−−=
−
−
.1exp.exp.)(
.
.
.1exp.)(sinh)(cosh
.)(
2
12
2
dzkT
iesinstabilitnumericalavoidtoconditionswaterdeepforequationfollowingtheUse
xxk
depthwatergeneraldkzk
T
seqcsu
s
s
seqcsu
(22)
and
)(.1)( sueqcsu TT ωωω −′ −=
(23)
It should be noted that for negative current, ε at ( )ugs 4=ω in Eq. (17) is zero, and hence
( )ssG ωηη)( would be infinity. It is therefore better to keep ( ) ( )ugs 498.00 pp ω . Therefore,
( ) ( )ugc 43.00 pp ω or ( ) ( )ugf c 068.00 pp . For a –1m/s current,
Hzfc 667.00 pp . This means that wave components with periods greater than 1.5 seconds will be included. Waves with shorter periods are not particularly significant. For current of –1.5 m/s, waves with periods longer than 2.25 seconds are included.

52
0 2 4 6 8 10 -3
-2
-1
0
1
2
3
wc: angular frequency (rad/sec) for the observer moving with the current
Relationship between ws and wc for a current of -g/8 = -1.2257 m/sec
ws
: ang
ular
freq
uenc
y (r
ad/s
ec)
for
the
stat
iona
ry o
bser
ver
(ws)max = g/(4|u|)
(wc = g/|u|; ws = 0
wc = g/(2|u|)
Figure A.1: Effect of negative current on wave frequency (deep-water condition assumed)
0 2 4 6 8 10 0
5
10
15
20
25
wc: angular frequency (rad/sec) for the observer moving with the current
Relationship between ws and wc for a current of g/8 = 1.2257 m/sec
ws
: ang
ular
freq
uenc
y (r
ad/s
ec)
for
the
stat
iona
ry o
bser
ver
Figure A.2: Effect of positive current on wave frequency (deep-water condition assumed)

53
0 0.5 1 1.5 2 2.5 3 0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
wc: angular frequency (rad/sec) for the observer moving with the current
Relationship between ws and wc for a current of g/8 = -1.2257
m/sec
ws
: ang
ular
freq
uenc
y (r
ad/s
ec)
for
the
stat
iona
ry
obse
rver
Figure A.3: Effect of negative current on wave frequency (general water depth condition assumed)
0 0.5 1 1.5 2 2.5 3 0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
wc: angular frequency (rad/sec) for the observer moving with the current
Relationship between ws and wc for a current of g/8 = 1.2257 m/sec
ws
: ang
ular
freq
uenc
y (r
ad/s
ec)
for
the
stat
iona
ry o
bser
ver
Figure A.4: Effect of positive current on wave frequency (general water depth condition assumed)

54
0 0.5 1 1.5 2 1
1.5
2
2.5
3
3.5
4
ws : angular frequency (rad/sec) for the stationary observer
Relationship between derivative of wc and ws for u = -1.2257 m/sec
Der
ivat
ive
of w
c w
ith r
espe
ct to
ws
Figure A.5: Derivative of ωc with respect to ωs for negative current (general water depth condition assumed)
0 1 2 3 4 5 0.55
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
ws : angular frequency (rad/sec) for the stationary observer
Relationship between derivative of wc and ws for u = 1.2257 m/sec
Der
ivat
ive
of w
c w
ith r
espe
ct to
ws
Figure A.6: Derivative of ωc with respect to ωs for positive current (general water depth condition assumed)

55
APPENDIX B LOAD INTERMITTENCY IN THE SPLASH ZONE
The elevation of the nodal point A above seabed is denoted by z and the surface elevation above the mean water level at that point is denoted by η(t). Then when water depth + η(t) is greater than z, the member is submerged and subject to loading; otherwise the member is exposed and receives no loading. This situation can be represented by the Heavyside function which is equal to one when its argument is positive and zero when its argument is negative.
00)(01)(
≤=>=
xxHxxH
(1)
The Heavyside function can be defined as
01)(00)(01)(
2)(1
)(
<−===>=
+=
xxsignxxsignxxsign
xsignxH
(2)
Therefore, the loading for points which are subject to intermittency, must be multiplied by )])([( ztdepthwaterH −+η (3) Points which are above or below the mean water level by up to six times the standard deviation of the surface elevation (i.e. 1.5*Hs) can be considered subject to intermittency. For other points below the mean water level, (η(t) – z) is always positive and hence the Heavyside function will always be equal to unity. There is, therefore, no need to multiply the loads by this function.

56
APPENDIX C CROSS-COVARIANCE MATRIX OF WATER PARTICLE KINEMATICS
Short-crested (directional) seas can be modelled as the sum of a large number of progressive linear waves of different amplitudes travelling in different directions with random phases (Borgman, 1969). Let x and y be the coordinates in an arbitrary horizontal Cartesian coordinate system such that the positive y axis is 90 degrees anti-clockwise from the positive x axis. The z axis is vertically upwards. The waves are assumed to travel in a direction θ measured anti-clockwise from the positive x axis. The cross-covariances between nodal kinematics at nodes I and J are given in the following tables (Borgman, 1977) where f stands for wave frequency and ω = 2πf is its angular frequency. Gηη(f) and D(f,θ) are the surface elevation frequency spectrum and the spreading function, respectively. Γhv and Γw stand for transfer functions converting the surface elevation to horizontal and vertical water particle kinematics, respectively and ]sincos[ θθϕ yxk ∆+∆=∆ is the phase shift between kinematics, where k is the wave number for the wave component with frequency f, and .∆x = xJ – xI and .∆y = yJ – yI. In the following equations η refers to surface elevation, U, V and W to x, y and z components of water particle velocity, and UD, VD and WD refer to x, y and z components of water particle acceleration. Table 1: Cross-covariances between the X component of water particle velocity at
node I and kinematics at node J E[(U)I . (U)J] = ( ) θϕθθ
θ
θηη ddfzzfDfG jhvihv
f
f∫ ∫
∆ΓΓ
max
min
max
min
cos)()(),()()(cos2
E[[(U)I . (UD)J] = ( ) θϕωθθ
θ
θηη ddfzzfDfG jhvihv
f
f∫ ∫
∆ΓΓ
max
min
max
min
sin)()(),()()(cos2
E[[(U)I . (V)J] = ( ) θϕθθθ
θ
θηη ddfzzfDfG jhvihv
f
f∫ ∫
∆ΓΓ
max
min
max
min
cos)()(),()()cos()sin(
E[[(U)I . (VD)J] = ( ) θϕωθθθ
θ
θηη ddfzzfDfG jhvihv
f
f∫ ∫
∆ΓΓ
max
min
max
min
sin)()(),()()cos()sin(
E[[(U)I . (W)J] = ( ) θϕθθ
θ
θηη ddfzzfDfG jwihv
f
f∫ ∫
∆ΓΓ
max
min
max
min
sin)()(),()()cos(
E[[(U)I . (WD)J] = ( ) θϕωθθ
θ
θηη ddfzzfDfG jwihv
f
f∫ ∫
∆ΓΓ−
max
min
max
min
cos)()(),()()cos(
E[[(U)I . (η)J] = ( ) θϕθθ
θ
θηη ddfzfDfG ihv
f
f∫ ∫
∆Γ
max
min
max
min
cos)(),()()cos(

57
Table 2: Cross-covariances between the X component of water particle acceleration at node I and kinematics at node J
E[(UD)I . (U)J] = ( ) θϕωθθ
θ
θηη ddfzzfDfG jhvihv
f
f∫ ∫
∆ΓΓ−
max
min
max
min
sin)()(),()()(cos2
E[[(UD)I . (UD)J] = ( ) θϕωθθ
θ
θηη ddfzzfDfG jhvihv
f
f∫ ∫
∆ΓΓ
max
min
max
min
cos)()(),()()(cos 22
E[[(UD)I . (V)J] = ( ) θϕωθθθ
θ
θηη ddfzzfDfG jhvihv
f
f∫ ∫
∆ΓΓ−
max
min
max
min
sin)()(),()()cos()sin(
E[[(UD)I . (VD)J] = ( ) θϕωθθθ
θ
θηη ddfzzfDfG jhvihv
f
f∫ ∫
∆ΓΓ
max
min
max
min
cos)()(),()()cos()sin( 2
E[[(UD)I . (W)J] = ( ) θϕωθθ
θ
θηη ddfzzfDfG jwihv
f
f∫ ∫
∆ΓΓ
max
min
max
min
cos)()(),()()cos(
E[[(UD)I . (WD)J] = ( ) θϕωθθ
θ
θηη ddfzzfDfG jwihv
f
f∫ ∫
∆ΓΓ
max
min
max
min
sin)()(),()()cos( 2
E[[(UD)I . (η)J] = ( ) θϕωθθ
θ
θηη ddfzfDfG ihv
f
f∫ ∫
∆Γ−
max
min
max
min
sin)(),()()cos(
Table 3: Cross-covariances between the Y component of water particle velocity at node I
and kinematics at node J E[(V)I . (U)J] = ( ) θϕθθθ
θ
θηη ddfzzfDfG jhvihv
f
f∫ ∫
∆ΓΓ
max
min
max
min
cos)()(),()()cos()sin(
E[[(V)I . (UD)J] = ( ) θϕωθθθ
θ
θηη ddfzzfDfG jhvihv
f
f∫ ∫
∆ΓΓ
max
min
max
min
sin)()(),()()cos()sin(
E[[(V)I . (V)J] = ( ) θϕθθ
θ
θηη ddfzzfDfG jhvihv
f
f∫ ∫
∆ΓΓ
max
min
max
min
cos)()(),()()(sin2
E[[(V)I . (VD)J] = ( ) θϕωθθ
θ
θηη ddfzzfDfG jhvihv
f
f∫ ∫
∆ΓΓ
max
min
max
min
sin)()(),()()(sin2
E[[(V)I . (W)J] = ( ) θϕθθ
θ
θηη ddfzzfDfG jwihv
f
f∫ ∫
∆ΓΓ
max
min
max
min
sin)()(),()()sin(
E[[(V)I . (WD)J] = ( ) θϕωθθ
θ
θηη ddfzzfDfG jwihv
f
f∫ ∫
∆ΓΓ−
max
min
max
min
cos)()(),()()sin(
E[[(V)I . (η)J] = ( ) θϕθθ
θ
θηη ddfzfDfG ihv
f
f∫ ∫
∆Γ
max
min
max
min
cos)(),()()sin(

58
Table 4: Cross-covariances between the Y component of water particle acceleration at node I and kinematics at node J
E[(VD)I . (U)J] ( ) θϕωθθθ
θ
θηη ddfzzfDfG jhvihv
f
f∫ ∫
∆ΓΓ−
max
min
max
min
sin)()(),()()cos()sin(
E[[(VD)I . (UD)J] = ( ) θϕωθθθ
θ
θηη ddfzzfDfG jhvihv
f
f∫ ∫
∆ΓΓ
max
min
max
min
cos)()(),()()cos()sin( 2
E[[(VD)I . (V)J] = ( ) θϕωθθ
θ
θηη ddfzzfDfG jhvihv
f
f∫ ∫
∆ΓΓ−
max
min
max
min
sin)()(),()()(sin2
E[[(VD)I . (VD)J] = ( ) θϕωθθ
θ
θηη ddfzzfDfG jhvihv
f
f∫ ∫
∆ΓΓ
max
min
max
min
cos)()(),()()(sin 22
E[[(VD)I . (W)J] = ( ) θϕωθθ
θ
θηη ddfzzfDfG jwihv
f
f∫ ∫
∆ΓΓ
max
min
max
min
cos)()(),()()sin(
E[[(VD)I . (WD)J] = ( ) θϕωθθ
θ
θηη ddfzzfDfG jwihv
f
f∫ ∫
∆ΓΓ
max
min
max
min
sin)()(),()()sin( 2
E[[(VD)I . (η)J] = ( ) θϕωθθ
θ
θηη ddfzfDfG ihv
f
f∫ ∫
∆Γ−
max
min
max
min
sin)(),()()sin(
Table 5: Cross-covariances between the vertical component of water particle velocity at node I and kinematics at node J
E[(W)I . (U)J] = ( ) θϕθθ
θ
θηη ddfzzfDfG jhviw
f
f∫ ∫
∆ΓΓ−
max
min
max
min
sin)()(),()()cos(
E[[(W)I . (UD)J] = ( ) θϕωθθ
θ
θηη ddfzzfDfG jhviw
f
f∫ ∫
∆ΓΓ
max
min
max
min
cos)()(),()()cos(
E[[(W)I . (V)J] = ( ) θϕθθ
θ
θηη ddfzzfDfG jhviw
f
f∫ ∫
∆ΓΓ−
max
min
max
min
sin)()(),()()sin(
E[[(W)I . (VD)J] = ( ) θϕωθθ
θ
θηη ddfzzfDfG jhviw
f
f∫ ∫
∆ΓΓ
max
min
max
min
cos)()(),()()sin(
E[[(W)I . (W)J] = ( ) θϕθ
θ
θηη ddfzzfDfG jwiw
f
f∫ ∫
∆ΓΓ
max
min
max
min
cos)()(),()(
E[[(W)I . (WD)J] = ( ) θϕωθ
θ
θηη ddfzzfDfG jwiw
f
f∫ ∫
∆ΓΓ
max
min
max
min
sin)()(),()(
E[[(W)I . (η)J] = ( ) θϕθ
θ
θηη ddfzfDfG iw
f
f∫ ∫
∆Γ−
max
min
max
min
sin)(),()(

59
Table 6: Cross-covariances between the vertical component of water particle acceleration at node I and kinematics at node J
E[(WD)I . (U)J] = ( ) θϕωθθ
θ
θηη ddfzzfDfG jhviw
f
f∫ ∫
∆ΓΓ−
max
min
max
min
cos)()(),()()cos(
E[[(WD)I . (UD)J] = ( ) θϕωθθ
θ
θηη ddfzzfDfG jhviw
f
f∫ ∫
∆ΓΓ−
max
min
max
min
sin)()(),()()cos( 2
E[[(WD)I . (V)J] = ( ) θϕωθθ
θ
θηη ddfzzfDfG jhviw
f
f∫ ∫
∆ΓΓ−
max
min
max
min
cos)()(),()()sin(
E[[(WD)I . (VD)J] = ( ) θϕωθθ
θ
θηη ddfzzfDfG jhviw
f
f∫ ∫
∆ΓΓ−
max
min
max
min
sin)()(),()()sin( 2
E[[(WD)I . (W)J] = ( ) θϕωθ
θ
θηη ddfzzfDfG jwiw
f
f∫ ∫
∆ΓΓ−
max
min
max
min
sin)()(),()(
E[[(WD)I . (WD)J] = ( ) θϕωθ
θ
θηη ddfzzfDfG jwiw
f
f∫ ∫
∆ΓΓ
max
min
max
min
cos)()(),()( 2
E[[(WD)I . (η)J] = ( ) θϕωθ
θ
θηη ddfzfDfG iw
f
f∫ ∫
∆Γ−
max
min
max
min
cos)(),()(
Table 7: Cross-covariances between surface elevation at node I and kinematics at node J
E[(η)I . (U)J] = ( ) θϕθθ
θ
θηη ddfzfDfG jhv
f
f∫ ∫
∆Γ
max
min
max
min
cos)(),()()cos(
E[[(η)I . (UD)J] = ( ) θϕωθθ
θ
θηη ddfzfDfG jhv
f
f∫ ∫
∆Γ
max
min
max
min
sin)(),()()cos(
E[[(η)I . (V)J] = ( ) θϕθθ
θ
θηη ddfzfDfG jhv
f
f∫ ∫
∆Γ
max
min
max
min
cos)(),()()sin(
E[[(η)I . (VD)J] = ( ) θϕωθθ
θ
θηη ddfzfDfG jhv
f
f∫ ∫
∆Γ
max
min
max
min
sin)(),()()sin(
E[[(η)I . (W)J] = ( ) θϕθ
θ
θηη ddfzfDfG jw
f
f∫ ∫
∆Γ
max
min
max
min
sin)(),()(
E[[(η)I . (WD)J] = ( ) θϕωθ
θ
θηη ddfzfDfG jw
f
f∫ ∫
∆Γ−
max
min
max
min
cos)(),()(
E[[(η)I . (η)J] = ( ) θϕθ
θ
θηη ddffDfG
f
f∫ ∫
∆
max
min
max
min
cos),()(

Printed and published by the Health and Safety ExecutiveC30 1/98
60

Printed and published by the Health and Safety ExecutiveC30 1/98
61

Printed and published by the Health and Safety ExecutiveC0.35 4/02

OTO 2002/011
£25.00 9 780717 623426
ISBN 0-7176-2342-4