Embed Size (px)
Citation preview

MAE 545: Lecture 13 (10/29)
Elastic deformation energy for beams and thin filaments

2
Deformations of macroscopic beams
Lt
undeformed beam beamcross-section
beam made of material with
Young’s modulusE0
L(1 + ✏)
stretching
✏strain
Es
L=
k✏2
2
k / E0t2
twisting
�
angle of twist� = ⌦L
Et
L=
C⌦2
2C / E0t
4
Bending and twisting is much easier than stretching for long and narrow beams!
R R
radius of curvature
bending
A / E0t4
Eb
L=
A
2R2

3
Energy cost of deformationsrotation rate ofmaterial frame
zx
y
E =Z
ds
2⇥A1⌦2
1 + A2⌦22 + C⌦2
3
⇤
R1 = ⌦�11 R2 = ⌦�1
2
p = 2⇡⌦�13
bending around twisting aroundbending around e2e1 e3
Bending and twisting represented as rotations of material frame
undeformed beam deformed beam
s
d~eids
= ~⌦⇥ ~ei~⌦ = ⌦1~e1 + ⌦2~e2 + ⌦3~e3
~e1 ~e1~e2 ~e2
~e3~e3

4
Energy cost of deformationsrotation rate ofmaterial frame
zx
y
E =Z
ds
2⇥A1⌦2
1 + A2⌦22 + C⌦2
3
⇤
Bending and twisting represented as rotations of material frame
undeformed beam deformed beam
s
d~eids
= ~⌦⇥ ~ei~⌦ = ⌦1~e1 + ⌦2~e2 + ⌦3~e3
~e1 ~e1~e2 ~e2
~e3~e3
Bending and twisting modes are coupled,because successive rotations do not commute!
Ry
⇣⇡
2
⌘Rz
⇣⇡
2
⌘z = Ry
⇣⇡
2
⌘z = x
Rz
⇣⇡
2
⌘Ry
⇣⇡
2
⌘z = Rz
⇣⇡
2
⌘x = y
plectonemes

5
Elastic energy of deformations in the general form
Energy density for a deformed filament can be Taylor expanded around the minimum energy ground state
E =
Z L
0
ds
2
A11⌦
21 +A22⌦
22 + C⌦2
3 + 2A12⌦1⌦2 +2A13⌦1⌦3 + 2A23⌦2⌦3
twist-bend coupling
+k✏2 +2D1✏⌦1 + 2D2✏⌦2 + 2D3✏⌦3
�
twist-stretchcoupling
bend-stretchcoupling
Energy density is positive definitive functional!A11, A22, A33, k > 0
A2ij < AiiAjj
D2i < kAii
In principle 10 elastic constants, but symmetries of filament shape determine how many independent
elastic constants are allowed!

6
Beams with uniform cross-section along the long axis
~e1~e2
~e3
beamcross-section
Beam has mirror symmetry through a plane perpendicular to . ~e3
Two beam deformations that are mirror images of each other must have the same energy cost!

7
Beams with uniform cross-section along the long axis
~e1~e2
~e3
beamcross-section
E =
Z L
0
ds
2
A11⌦
21 +A22⌦
22 + C⌦2
3+2A12⌦1⌦2 �
Twist is decoupled from bending and stretching!
+k✏2 + 2D1✏⌦1 + 2D2✏⌦2
Beam has mirror symmetry through a plane perpendicular to . ~e3
A13 = A23 = D3 = 0

8
Blades of propellers and turbines are chiral, therefore there is coupling between twist and bend deformations!
Twist-bend coupling in propellers and turbineswind turbine airplane propeller
ship propeller

9
Beams with isosceles triangle cross-section
~e1~e2
~e3
beamcross-section
~e1
~e2
~e3�
Beam has 2-fold rotational symmetry around axis . ~e2
Note: n-fold rotational symmetry is symmetry
due to rotation by angle .2⇡/n
Beam has mirror symmetry through a plane perpendicular to . ~e3
Beam has mirror symmetry through a plane perpendicular to . ~e1

10
bending around ~e1 bending around ~e2 twisting around
How mirroring around affects bending and twisting?
⌦1 ⌦2⌦3
⌦1 �⌦3
Note: mirroring doesn’t affect stretching
mirrorimage mirror
imagemirrorimage
~e1~e2
~e3
beamcross-section
~e1
~e2
~e3�
~e1
�⌦2
~e3
A12 = A13 = D2 = D3 = 0

⌦3
11
bending around ~e1 bending around ~e2 twisting around
How rotation by around affects bending and twisting?
⌦1 ⌦2⌦3
⌦1
Note: rotation doesn’t affect stretching
rotation
~e1~e2
~e3
beamcross-section
~e1
~e2
~e3�
�⌦2
~e3
⇡ ~e2
rotation rotation
A12 = A23 = D2 = 0

12
Elastic energy for beams of various cross-sectionsbeam
cross-sectionE =
Z L
0
ds
2
A11⌦
21 +A22⌦
22 + C⌦2
3+2A12⌦1⌦2 �
E =
Z L
0
ds
2
A11⌦
21 +A22⌦
22 + C⌦2
3
+k✏2 + 2D1✏⌦1
�
+k✏2 + 2D1✏⌦1 + 2D2✏⌦2

13
Beams with rectangular cross-section
~e1~e2
~e3
beamcross-section
~e1
~e2
~e3�
Beam has 2-fold rotational symmetry around axis . ~e2
Beam has mirror symmetry through a plane perpendicular to . ~e3
Beam has mirror symmetry through a plane perpendicular to . ~e1
Beam has mirror symmetry through a plane perpendicular to . ~e2
Beam has 2-fold rotational symmetry around axis . ~e3

⌦2
14
bending around ~e1 bending around ~e2 twisting around
How mirroring around affects bending and twisting?
⌦1 ⌦2⌦3
�⌦3
Note: mirroring doesn’t affect stretching
mirrorimage mirror
imagemirrorimage
~e1
~e2
~e3�
~e3
~e2
~e1~e2
~e3
beamcross-section
�⌦1
A12 = A23 = D1 = D3 = 0

⌦3
�⌦1
15
bending around ~e1 bending around ~e2 twisting around
How rotation by around affects bending and twisting?
⌦2
Note: rotation doesn’t affect stretching
rotation
�⌦2
~e3
⇡
rotation rotation
~e3
~e1
~e2
~e3�
~e1~e2
~e3
beamcross-section
⌦1 ⌦3
A13 = A23 = D1 = D2 = 0

16
Elastic energy for beams of various cross-sectionsbeam
cross-sectionE =
Z L
0
ds
2
A11⌦
21 +A22⌦
22 + C⌦2
3+2A12⌦1⌦2�
E =
Z L
0
ds
2
A11⌦
21 +A22⌦
22 + C⌦2
3
+k✏2 + 2D1✏⌦1
�
+k✏2 + 2D1✏⌦1 + 2D2✏⌦2
E =
Z L
0
ds
2
A11⌦
21 +A22⌦
22 + C⌦2
3 + k✏2�

17
Beams with square cross-section
~e1~e2
~e3
beamcross-section
~e1
~e2
~e3�
Beam has 2-fold rotational symmetry around axis . ~e2
Beam has mirror symmetry through a plane perpendicular to . ~e3
Beam has mirror symmetry through a plane perpendicular to . ~e1
Beam has mirror symmetry through a plane perpendicular to . ~e2
Beam has 4-fold rotational symmetry around axis . ~e3

⌦3�⌦1
18
bending around ~e1 bending around ~e2 twisting around
How rotation by around affects bending and twisting?
⌦2
Note: rotation doesn’t affect stretching
rotation
~e3
rotation rotation
~e3
~e1
~e2
~e3�
beamcross-section
⌦1 ⌦3
⇡/2
~e1~e2
~e3
⌦2
A11 = A22, A12 = D1 = D2 = 0

19
Elastic energy for beams of various cross-sectionsbeam
cross-section
E =
Z L
0
ds
2
A11⌦
21 +A22⌦
22 + C⌦2
3+2A12⌦1⌦2�
E =
Z L
0
ds
2
A11⌦
21 +A22⌦
22 + C⌦2
3
+k✏2 + 2D1✏⌦1
�
+k✏2 + 2D1✏⌦1 + 2D2✏⌦2
E =
Z L
0
ds
2
A11⌦
21 +A22⌦
22 + C⌦2
3 + k✏2�
E =
Z L
0
ds
2
A�⌦2
1 + ⌦22
�+ C⌦2
3 + k✏2�
+2A12(s)⌦1(s)⌦2(s) + 2A13(s)⌦1(s)⌦3(s) + 2A23(s)⌦2(s)⌦3(s)
E =
Z L
0
ds
2
A11(s)⌦
21(s) +A22(s)⌦
22(s) + C(s)⌦2
3(s)
+k(s)✏(s)2 + 2D1(s)✏(s)⌦1(s) + 2D2(s)✏(s)⌦2(s) + 2D3(s)✏(s)⌦3(s)
�

20
DNA
982
Mar
ko a
nd
Sig
gia
Mac
rom
olec
ules
, V
ol.
27, N
o. 4, 1
994
V
Fig
ure
1.
Sch
emat
ic d
iagr
am o
f th
e B
-DN
A m
olec
ule.
T
he
mol
ecul
ar d
iam
eter
is d
= 2
0 A
, th
e he
lical
rep
eat l
engt
h is
1 =
27
r/w
0 =
34 A
, cor
resp
ondi
ng to
a s
tack
of a
bout 1
0.5
nuc
leic
aci
d bas
es.
The
nucl
eotide
s ar
e bo
und
betw
een
the
suga
r-ph
osph
ate
back
bone
hel
ices
: w
e no
te t
he
arro
ws
on t
he
side
vie
w (
upper
p
ort
ion
of
figure
), w
hich
indic
ate
the
oppo
site
dir
ecte
dnes
s of
the
two
helic
es.
The
wid
e m
ajor
gro
ove
is m
arke
d “M”,
whi
le th
e na
rrow
er m
inor
gro
ove
is m
arke
d “m
”. T
he
low
er p
art
of t
he
fig
ure
sho
ws t
he
end
view
of
B-D
NA
, wit
h ta
ngen
t t d
irec
ted o
ut
of t
he
pag
e.
11.
Ela
stic
Fre
e E
ne
rgy
of DNA
A.
Sy
mm
etr
y A
naly
sis.
B-D
NA
mo
lecu
les2
are
rig
ht-
h
and
ed c
hir
al r
od
s of
cro
ss-s
ecti
on
al d
iam
eter
d =
21
A.
As sc
hem
atic
ally
sho
wn
in F
igu
re 1
, th
e p
airs
of n
ucl
eoti
des
(o
ccu
py
ing
the m
ajo
r gro
ove
reg
ion
, den
ote
d M
in
Fig
ure
1) a
re a
rran
ged
in
a h
elix
wit
h a
pit
ch o
f ab
ou
t 1
= 3
4 A
co
rres
po
nd
ing
to
a h
elic
al r
epea
t ev
ery
10.5
bas
e p
airs
(b
p).
W
e d
efin
e th
e m
ole
cula
r ax
is (
the c
ente
r of
th
e
mo
lecu
le) to
be
des
crib
ed b
y t
he s
pac
e cu
rve
r(s),
wit
h s
b
ein
g a
rcle
ng
th.
Th
e t
ang
ent
t 1 d
r/d
s th
us
has
un
it
len
gth
.
At
any
s,
con
sid
er t
he
pla
ne
per
pen
dic
ula
r to
t.
Th
e
two s
ug
ar-p
ho
sph
ate
bac
kb
on
es (
the tw
o h
elic
es, d
raw
n
wit
h o
pp
osi
ng
arr
ow
s in
Fig
ure
1) i
nte
rsec
t th
is p
lan
e a
t tw
o p
oin
ts R
an
d S
. W
e d
efin
e u t
o b
e th
e u
nit
vec
tor
in
this
pla
ne
tha
t p
oin
ts f
rom
th
e m
ole
cula
r ax
is t
o t
he
mid
po
int
of E
. A
fin
al u
nit
vec
tor
v i
s d
efin
ed b
y v =
t
X u s
o t
ha
t th
e s
et (u, v,
t) f
orm
s a
rig
ht-
han
ded
co
ord
inat
e sy
stem
at
each
po
int
s.
It w
ill
be
hel
pfu
l to
te
mp
ora
rily
use
in
dex
ed v
ecto
rs e
(l) u, e
(2) =
v, a
nd
e(3
)
= t.
A g
ener
al d
efo
rmat
ion
of
the m
ole
cule
th
at
mai
nta
ins
t2 = 1
may
be
des
crib
ed b
y i
nfi
nit
esim
al r
ota
tio
ns
Q(s
) of
th
e c
oo
rdin
ate
axe^
:^^^
de“
’
ds
-- -
+
ill
x e
“’
wh
ere 00 =
2*/
1=
0.1
85 A
-l d
eter
min
es t
he h
elic
al r
epea
t le
ng
th i
n t
he a
bse
nce
of
def
orm
atio
ns.
W
e m
ay t
hin
k o
f th
e c
om
po
nen
ts O
i =
il.e
ci)
as “
stra
ins”
whic
h lo
call
y
gen
erat
e ro
tati
on
s of
th
e c
oo
rdin
ates
aro
un
d e
(’).
If Q =
0
, th
e m
ole
cule
tak
es i
ts u
nd
isto
rted
co
nfi
gu
rati
on
sh
ow
n
in F
igure
1.
Th
e m
ole
cula
r ax
is r
(s) i
s o
bta
ined
for g
ener
al
Q b
y i
nte
gra
tin
g t
he t
ang
ent
equ
atio
n d
r/d
s =
e(3
).
Th
e in
teg
ral
Tw
= L
/1 +
J d
s Q
3/(
2r
) is d
efin
ed t
o b
e th
e d
ou
ble
hel
ix “
twis
t”3
wh
ere
L i
s th
e m
ole
cule
len
gth
, an
d w
her
e th
e i
nte
gra
l is
fro
m s
= 0
to
s =
L.
Fo
r an
u
nd
isto
rted
mo
lecu
le, T
w =
L/1, an
d T
w ju
st c
ou
nts
th
e
nu
mb
er o
f h
elic
al t
urn
s of
len
gth
1 a
lon
g t
he c
hai
n.
Fo
r a
dis
tort
ed c
hai
n, t
he e
xces
s tw
ist
per
hel
ix r
epea
t is
(T
w
- L/l)/(L/l)
= (
Q3
)/
~0
,
wh
ere
we
use
th
e n
ota
tio
n (
Q3
) =
L-’J
; d
s Q
3(s) to
den
ote
an
av
erag
e al
on
g t
he c
hai
n o
f le
ng
th L
>>
1.
Sin
ce w
e as
sum
e th
at th
e Q
= 0
sta
te is
eq
uil
ibri
um
, we
may
wri
te t
he f
ree
ener
gy
fo
r sm
all
stra
ins
as a
Tay
lor
exp
ansi
on
in
a a
nd
its
s d
eriv
ativ
es.1
0 T
he lo
wes
t o
rder
term
s ar
e
(2)
wh
ere
we
hav
e in
tro
du
ced
th
e m
atri
ces
Aij
an
d A
ijk, w
hic
h
are
sym
met
ric
un
der
all
per
mu
tati
on
s of
th
eir
ind
ices
, an
d w
her
e th
e i
nte
gra
l ru
ns
over
th
e m
ole
cula
r ax
is o
f le
ng
th L
. If
we
ign
ore
nu
cleo
tid
e-se
qu
ence
dep
end
ence
of
th
e e
last
ic p
rop
erti
es o
f th
e m
ole
cule
(o
r if
we
rest
rict
o
ur
atte
nti
on
to
sy
mm
etri
c re
pea
ts s
uch
as ($
i)N
th
en
th
e
A m
atri
ces
hav
e n
o s
dep
end
ence
, si
nce
in
th
ese
coo
rdi-
n
ates
, ev
ery
po
int
alo
ng
th
e m
ole
cule
in
th
e u
nd
isto
rted
st
ate
is e
qu
ival
ent.
W
e w
ill r
efer
to
thes
e m
atri
ces
as th
e
“ela
stic
co
nst
ants
”: t
hey
may
dep
end
on
en
vir
on
men
tal
fact
ors
(te
mp
erat
ure
, io
nic
str
eng
th,
pH
, et
c.).
W
e w
ill
ign
ore
th
e c
on
stan
t fr
ee e
ner
gy
A0 fo
r th
e r
emai
nd
er o
f th
is p
aper
.
Th
e s
ec
on
d-o
rde
r m
atr
ix h
as
six
in
de
pe
nd
en
t co
mp
on
ents
: A
ll,
A22
, A
33,
A12,
A13
9 an
d A
23.
We
now
sh
ow
how
sy
mm
etri
es m
ake
som
e of
th
ese
com
po
nen
ts
van
ish
. N
ote
th
at
rota
tio
n b
y 1
80’
aro
un
d t
he v
ecto
r u
is a
sy
mm
etry
of
the u
nd
isto
rted
mo
lecu
le (
see
Fig
ure
1).
N
ow c
on
sid
er a
n in
fin
ites
imal
seg
men
t of
len
gth
ds
fro
m
s =
-d
s/2
to
ds/
2,
wit
h u
nif
orm
str
ain
Q =
(01, 02, O
S).
R
ota
tio
n o
f th
is s
egm
ent
by
180
’ ar
ou
nd
u(s
= 0
) y
ield
s p
reci
sely
th
e s
egm
ent
con
fig
ura
tio
n w
ith
un
ifo
rm s
trai
n
il’ =
(4
1,
Qz, O
3).
T
her
efo
re c
on
fig
ura
tio
ns D a
nd
D’ h
ave
the s
ame
free
en
erg
y,
ind
icat
ing
th
at
A12
=
A13 =
0.l
’
We
no
te t
ha
t ro
tati
on
s b
y 1
80’
aro
un
d e
ith
er t
(0)
or
v(0
) d
o n
ot
tak
e o
ur
infi
nit
esim
al d
isto
rted
seg
men
t to
a
con
fig
ura
tio
n w
ith
tran
sfo
rmed
D b
ecau
se th
ese
op
erat
ion
s are
no
t sy
mm
etri
es o
f th
e u
nd
isto
rted
mole
cule
. T
he la
ck
of s
ym
met
ry u
nd
er t
hes
e o
per
atio
ns
is d
ue to
the e
xis
ten
ce
of t
wo
dis
tin
ct reg
ion
s of
th
e D
NA
su
rfac
e b
ou
nd
ed b
y th
e
two
hel
ices
, mar
ked
“M
” an
d “
m”
in F
igu
re 1
. T
hes
e tw
o
regio
ns ar
e re
ferr
ed to
as t
he ”
maj
or g
roove”
an
d th
e “
min
or
gro
ov
e”, r
esp
ecti
vel
y.
Th
e m
ino
r gro
ove
is n
arro
w, w
hil
e th
e m
ajo
r gro
ove
is w
ider
, fi
lled
up
by t
he n
ucl
eoti
des
w
hic
h a
re b
ou
nd
bet
wee
n th
e b
ack
bo
nes
. T
he tw
o g
rooves
ar
e al
so d
isti
ng
uis
hed
by
th
e o
pp
osi
te d
irec
ted
nes
s of
th
e
sug
ar-p
ho
sph
ate
bac
kb
on
es o
n t
hei
r b
ou
nd
arie
s.
A r
o-
tati
on
of
the u
nd
isto
rted
mo
lecu
le a
rou
nd
eit
her
t o
r v b
y
180”
exch
ang
es t
he m
ajo
r an
d m
ino
r gro
oves
.
Ch
iral
po
lym
ers
wit
ho
ut
this
par
ticu
lar
bro
ken
sym
- m
etry
(e.
g. a
do
ub
le-h
elix
po
lym
er w
ith
in
dis
tin
gu
ish
able
b
ack
bo
nes
, an
d th
eref
ore
inv
aria
nt u
nd
er r
ota
tio
n b
y 18
0’
abo
ut t)
wil
l h
ave
A23 =
0.
Fin
ally
, o
ne
sho
uld
no
te t
ha
t re
flec
tio
ns
(use
ful
in d
eriv
atio
n o
f th
e e
last
ic e
ner
gy
of
thin
ro
ds
wit
h r
efle
ctio
n s
ym
met
ries
lO can
no
t b
e u
sed
to
an
aly
ze a
ch
iral
ro
d s
uch
as
DN
A.
Th
us,
the n
on
zero
ele
men
ts o
f th
en
= 2
ela
stic
co
nst
ant
mat
rix
are
All
, A22, A
33, an
d A
23.
Ph
ysi
call
y, A
11 an
d A
22
are
(dis
tin
ct)
ben
din
g c
on
stan
ts a
sso
ciat
ed w
ith
ben
ds
loca
lly
in th
e p
lan
es p
erp
end
icu
lar
to u a
nd
v, r
esp
ecti
vel
y.
We
exp
ect
thes
e co
nst
ants
to
be
app
rox
imat
ely
eq
ual
to
th
e b
end
per
sist
ence
len
gth
~5
00
A
.4 T
he c
on
stan
t A33 i
s ju
st t
he
tw
ist
rig
idit
y,
an
d i
s ro
ug
hly
eq
ual
to
th
e t
wis
t p
ersi
sten
ce l
eng
th 2
50
0 A
.4
In a
dd
itio
n t
o th
e b
end
ing
rig
idit
ies
an
d tw
ist
rig
idit
y,
we
hav
e a
cou
pli
ng
A23 o
f b
end
s ab
ou
t th
e lo
cal v
ax
is a
nd
th
e tw
ist in
the q
uad
rati
c (O
(Q2
))
elas
tic
theo
ry.
Its
ov
eral
l m
agn
itu
de
sho
uld
als
o b
e co
ntr
oll
ed b
y th
e d
egre
e by w
hic
h
rota
tio
ns
of
the m
ole
cule
by 180°
abo
ut
v a
nd
t a
re n
ot
sym
met
ries
. F
or
DN
A,
thes
e o
per
atio
ns
esse
nti
ally
ex-
chan
ge
the m
ajo
r an
d m
ino
r gro
oves
of t
he
mo
lecu
le, w
hic
h
are
rath
er d
iffe
ren
t in
str
uct
ure
: w
e th
us
exp
ect A
23 =
Ai,
.
~e3~e1
~e2
982 Marko and Siggia Macromolecules, Vol. 27, No. 4, 1994
V
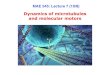
Figure 1. Schematic diagram of the B-DNA molecule. The molecular diameter is d = 20 A, the helical repeat length is 1 = 27r/w0 = 34 A, corresponding to a stack of about 10.5 nucleic acid bases. The nucleotides are bound between the sugar-phosphate backbone helices: we note the arrows on the side view (upper portion of figure), which indicate the opposite directedness of the two helices. The wide major groove is marked “M”, while the narrower minor groove is marked “m”. The lower part of the figure shows the end view of B-DNA, with tangent t directed out of the page.
11. Elastic Free Energy of DNA
A. Symmetry Analysis. B-DNA molecules2 are right- handed chiral rods of cross-sectional diameter d = 21 A. As schematically shown in Figure 1, the pairs of nucleotides (occupying the major groove region, denoted M in Figure 1) are arranged in a helix with a pitch of about 1 = 34 A corresponding to a helical repeat every 10.5 base pairs (bp). We define the molecular axis (the center of the molecule) to be described by the space curve r(s), with s being arclength. The tangent t 1 dr/ds thus has unit length.
At any s, consider the plane perpendicular to t. The two sugar-phosphate backbones (the two helices, drawn with opposing arrows in Figure 1) intersect this plane at two points R and S. We define u to be the unit vector in this plane that points from the molecular axis to the
midpoint of E. A final unit vector v is defined by v = t X u so that the set (u, v, t) forms a right-handed coordinate system at each point s. It will be helpful to temporarily use indexed vectors e(l) u, e(2) = v, and e(3)
= t. A general deformation of the molecule that maintains
t2 = 1 may be described by infinitesimal rotations Q(s) of the coordinate axe^:^^^
de“’
ds -- - + ill x e“’
where 00 = 2* /1= 0.185 A-l determines the helical repeat length in the absence of deformations. We may think of the components Oi = il.eci) as “strains” which locally generate rotations of the coordinates around e(’). If Q = 0, the molecule takes its undistorted configuration shown in Figure 1. The molecular axis r(s) is obtained for general Q by integrating the tangent equation dr/ds = e(3).
The integral T w = L/1 + J ds Q 3 / ( 2 r ) is defined to be the double helix “twist”3 where L is the molecule length, and where the integral is from s = 0 to s = L. For an undistorted molecule, T w = L/1, and Tw just counts the number of helical turns of length 1 along the chain. For a distorted chain, the excess twist per helix repeat is (Tw - L/l)/(L/l) = ( Q 3 ) / ~ 0 , where we use the notation ( Q 3 ) = L-’J; ds Q3(s) to denote an average along the chain of length L >> 1.
Since we assume that the Q = 0 state is equilibrium, we may write the free energy for small strains as a Taylor expansion in a and its s derivatives.10 The lowest order
terms are
(2)
where we have introduced the matrices Aij and Aijk, which are symmetric under all permutations of their indices, and where the integral runs over the molecular axis of length L. If we ignore nucleotide-sequence dependence of the elastic properties of the molecule (or if we restrict our attention to symmetric repeats such as ($i)N then the A matrices have no s dependence, since in these coordi- nates, every point along the molecule in the undistorted state is equivalent. We will refer to these matrices as the “elastic constants”: they may depend on environmental factors (temperature, ionic strength, pH, etc.). We will ignore the constant free energy A0 for the remainder of this paper.
The second-order matrix has six independent components: All , A22, A33, A12, A139 and A23. We now show how symmetries make some of these components vanish. Note that rotation by 180’ around the vector u is a symmetry of the undistorted molecule (see Figure 1). Now consider an infinitesimal segment of length ds from s = -ds/2 to ds/2, with uniform strain Q = (01, 02, OS). Rotation of this segment by 180’ around u(s = 0) yields precisely the segment configuration with uniform strain il’ = ( 4 1 , Qz, O3). Therefore configurations D and D’ have the same free energy, indicating that A12 = A13 = 0.l’
We note that rotations by 180’ around either t(0) or v(0) do not take our infinitesimal distorted segment to a configuration with transformed D because these operations are not symmetries of the undistorted molecule. The lack of symmetry under these operations is due to the existence of two distinct regions of the DNA surface bounded by the two helices, marked “M” and “m” in Figure 1. These two regions are referred to as the ”major groove” and the “minor groove”, respectively. The minor groove is narrow, while the major groove is wider, filled up by the nucleotides which are bound between the backbones. The two grooves are also distinguished by the opposite directedness of the sugar-phosphate backbones on their boundaries. A ro- tation of the undistorted molecule around either t or v by 180” exchanges the major and minor grooves.
Chiral polymers without this particular broken sym- metry (e.g. a double-helix polymer with indistinguishable backbones, and therefore invariant under rotation by 180’ about t) will have A23 = 0. Finally, one should note that reflections (useful in derivation of the elastic energy of thin rods with reflection symmetrieslO cannot be used to analyze a chiral rod such as DNA.
Thus, the nonzero elements of then = 2 elastic constant matrix are All , A22, A33, and A23. Physically, A11 and A22
are (distinct) bending constants associated with bends locally in the planes perpendicular to u and v, respectively. We expect these constants to be approximately equal to the bend persistence length ~ 5 0 0 A.4 The constant A33 is just the twist rigidity, and is roughly equal to the twist persistence length 2500 A.4
In addition to the bending rigidities and twist rigidity, we have a coupling A23 of bends about the local v axis and the twist in the quadratic (O(Q2)) elastic theory. Its overall magnitude should also be controlled by the degree by which rotations of the molecule by 180° about v and t are not symmetries. For DNA, these operations essentially ex- change the major and minor grooves of the molecule, which are rather different in structure: we thus expect A23 =Ai,.
~e1
~e2
~e3
p⇡
3.4n
m
For simplicity we ignore DNA sequence dependence
of elastic constants!
DNA is chiral and has right-handed helical
structure cross section
In the undeformed state DNA has spontaneous twist
!0 = 2⇡/p ⇡ 1.8 nm�1
Twist strain is measured relative to the
spontaneous twist
⌦3
d~eids
=⇣~⌦+ !0~e3
⌘⇥ ~ei

21
DNA982
Mar
ko a
nd
Sig
gia
Mac
rom
olec
ules
, V
ol.
27, N
o. 4, 1
994
V
Fig
ure
1.
Sch
emat
ic d
iagr
am o
f th
e B
-DN
A m
olec
ule.
T
he
mol
ecul
ar d
iam
eter
is d
= 2
0 A
, th
e he
lical
rep
eat l
engt
h is
1 =
27
r/w
0 =
34 A
, cor
resp
ondi
ng to
a s
tack
of a
bout 1
0.5
nuc
leic
aci
d bas
es.
The
nucl
eotide
s ar
e bo
und
betw
een
the
suga
r-ph
osph
ate
back
bone
hel
ices
: w
e no
te t
he
arro
ws
on t
he
side
vie
w (
upper
p
ort
ion
of
figure
), w
hich
indic
ate
the
oppo
site
dir
ecte
dnes
s of
the
two
helic
es.
The
wid
e m
ajor
gro
ove
is m
arke
d “M”,
whi
le th
e na
rrow
er m
inor
gro
ove
is m
arke
d “m
”. T
he
low
er p
art
of t
he
fig
ure
sho
ws t
he
end
view
of
B-D
NA
, wit
h ta
ngen
t t d
irec
ted o
ut
of t
he
pag
e.
11.
Ela
stic
Fre
e E
ne
rgy
of DNA
A.
Sy
mm
etr
y A
naly
sis.
B-D
NA
mo
lecu
les2
are
rig
ht-
h
and
ed c
hir
al r
od
s of
cro
ss-s
ecti
on
al d
iam
eter
d =
21
A.
As sc
hem
atic
ally
sho
wn
in F
igu
re 1
, th
e p
airs
of n
ucl
eoti
des
(o
ccu
py
ing
the m
ajo
r gro
ove
reg
ion
, den
ote
d M
in
Fig
ure
1) a
re a
rran
ged
in
a h
elix
wit
h a
pit
ch o
f ab
ou
t 1
= 3
4 A
co
rres
po
nd
ing
to
a h
elic
al r
epea
t ev
ery
10.5
bas
e p
airs
(b
p).
W
e d
efin
e th
e m
ole
cula
r ax
is (
the c
ente
r of
th
e
mo
lecu
le) to
be
des
crib
ed b
y t
he s
pac
e cu
rve
r(s),
wit
h s
b
ein
g a
rcle
ng
th.
Th
e t
ang
ent
t 1 d
r/d
s th
us
has
un
it
len
gth
.
At
any
s,
con
sid
er t
he
pla
ne
per
pen
dic
ula
r to
t.
Th
e
two s
ug
ar-p
ho
sph
ate
bac
kb
on
es (
the tw
o h
elic
es, d
raw
n
wit
h o
pp
osi
ng
arr
ow
s in
Fig
ure
1) i
nte
rsec
t th
is p
lan
e a
t tw
o p
oin
ts R
an
d S
. W
e d
efin
e u t
o b
e th
e u
nit
vec
tor
in
this
pla
ne
tha
t p
oin
ts f
rom
th
e m
ole
cula
r ax
is t
o t
he
mid
po
int
of E
. A
fin
al u
nit
vec
tor
v i
s d
efin
ed b
y v =
t
X u s
o t
ha
t th
e s
et (u, v,
t) f
orm
s a
rig
ht-
han
ded
co
ord
inat
e sy
stem
at
each
po
int
s.
It w
ill
be
hel
pfu
l to
te
mp
ora
rily
use
in
dex
ed v
ecto
rs e
(l) u, e
(2) =
v, a
nd
e(3
)
= t.
A g
ener
al d
efo
rmat
ion
of
the m
ole
cule
th
at
mai
nta
ins
t2 = 1
may
be
des
crib
ed b
y i
nfi
nit
esim
al r
ota
tio
ns
Q(s
) of
th
e c
oo
rdin
ate
axe^
:^^^
de“
’
ds
-- -
+
ill
x e
“’
wh
ere 00 =
2*/
1=
0.1
85 A
-l d
eter
min
es t
he h
elic
al r
epea
t le
ng
th i
n t
he a
bse
nce
of
def
orm
atio
ns.
W
e m
ay t
hin
k o
f th
e c
om
po
nen
ts O
i =
il.e
ci)
as “
stra
ins”
whic
h lo
call
y
gen
erat
e ro
tati
on
s of
th
e c
oo
rdin
ates
aro
un
d e
(’).
If Q =
0
, th
e m
ole
cule
tak
es i
ts u
nd
isto
rted
co
nfi
gu
rati
on
sh
ow
n
in F
igure
1.
Th
e m
ole
cula
r ax
is r
(s) i
s o
bta
ined
for g
ener
al
Q b
y i
nte
gra
tin
g t
he t
ang
ent
equ
atio
n d
r/d
s =
e(3
).
Th
e in
teg
ral
Tw
= L
/1 +
J d
s Q
3/(
2r
) is d
efin
ed t
o b
e th
e d
ou
ble
hel
ix “
twis
t”3
wh
ere
L i
s th
e m
ole
cule
len
gth
, an
d w
her
e th
e i
nte
gra
l is
fro
m s
= 0
to
s =
L.
Fo
r an
u
nd
isto
rted
mo
lecu
le, T
w =
L/1, an
d T
w ju
st c
ou
nts
th
e
nu
mb
er o
f h
elic
al t
urn
s of
len
gth
1 a
lon
g t
he c
hai
n.
Fo
r a
dis
tort
ed c
hai
n, t
he e
xces
s tw
ist
per
hel
ix r
epea
t is
(T
w
- L/l)/(L/l)
= (
Q3
)/
~0
,
wh
ere
we
use
th
e n
ota
tio
n (
Q3
) =
L-’J
; d
s Q
3(s) to
den
ote
an
av
erag
e al
on
g t
he c
hai
n o
f le
ng
th L
>>
1.
Sin
ce w
e as
sum
e th
at th
e Q
= 0
sta
te is
eq
uil
ibri
um
, we
may
wri
te t
he f
ree
ener
gy
fo
r sm
all
stra
ins
as a
Tay
lor
exp
ansi
on
in
a a
nd
its
s d
eriv
ativ
es.1
0 T
he lo
wes
t o
rder
term
s ar
e
(2)
wh
ere
we
hav
e in
tro
du
ced
th
e m
atri
ces
Aij
an
d A
ijk, w
hic
h
are
sym
met
ric
un
der
all
per
mu
tati
on
s of
th
eir
ind
ices
, an
d w
her
e th
e i
nte
gra
l ru
ns
over
th
e m
ole
cula
r ax
is o
f le
ng
th L
. If
we
ign
ore
nu
cleo
tid
e-se
qu
ence
dep
end
ence
of
th
e e
last
ic p
rop
erti
es o
f th
e m
ole
cule
(o
r if
we
rest
rict
o
ur
atte
nti
on
to
sy
mm
etri
c re
pea
ts s
uch
as ($
i)N
th
en
th
e
A m
atri
ces
hav
e n
o s
dep
end
ence
, si
nce
in
th
ese
coo
rdi-
n
ates
, ev
ery
po
int
alo
ng
th
e m
ole
cule
in
th
e u
nd
isto
rted
st
ate
is e
qu
ival
ent.
W
e w
ill r
efer
to
thes
e m
atri
ces
as th
e
“ela
stic
co
nst
ants
”: t
hey
may
dep
end
on
en
vir
on
men
tal
fact
ors
(te
mp
erat
ure
, io
nic
str
eng
th,
pH
, et
c.).
W
e w
ill
ign
ore
th
e c
on
stan
t fr
ee e
ner
gy
A0 fo
r th
e r
emai
nd
er o
f th
is p
aper
.
Th
e s
ec
on
d-o
rde
r m
atr
ix h
as
six
in
de
pe
nd
en
t co
mp
on
ents
: A
ll,
A22
, A
33,
A12,
A13
9 an
d A
23.
We
now
sh
ow
how
sy
mm
etri
es m
ake
som
e of
th
ese
com
po
nen
ts
van
ish
. N
ote
th
at
rota
tio
n b
y 1
80’
aro
un
d t
he v
ecto
r u
is a
sy
mm
etry
of
the u
nd
isto
rted
mo
lecu
le (
see
Fig
ure
1).
N
ow c
on
sid
er a
n in
fin
ites
imal
seg
men
t of
len
gth
ds
fro
m
s =
-d
s/2
to
ds/
2,
wit
h u
nif
orm
str
ain
Q =
(01, 02, O
S).
R
ota
tio
n o
f th
is s
egm
ent
by
180
’ ar
ou
nd
u(s
= 0
) y
ield
s p
reci
sely
th
e s
egm
ent
con
fig
ura
tio
n w
ith
un
ifo
rm s
trai
n
il’ =
(4
1,
Qz, O
3).
T
her
efo
re c
on
fig
ura
tio
ns D a
nd
D’ h
ave
the s
ame
free
en
erg
y,
ind
icat
ing
th
at
A12
=
A13 =
0.l
’
We
no
te t
ha
t ro
tati
on
s b
y 1
80’
aro
un
d e
ith
er t
(0)
or
v(0
) d
o n
ot
tak
e o
ur
infi
nit
esim
al d
isto
rted
seg
men
t to
a
con
fig
ura
tio
n w
ith
tran
sfo
rmed
D b
ecau
se th
ese
op
erat
ion
s are
no
t sy
mm
etri
es o
f th
e u
nd
isto
rted
mole
cule
. T
he la
ck
of s
ym
met
ry u
nd
er t
hes
e o
per
atio
ns
is d
ue to
the e
xis
ten
ce
of t
wo
dis
tin
ct reg
ion
s of
th
e D
NA
su
rfac
e b
ou
nd
ed b
y th
e
two
hel
ices
, mar
ked
“M
” an
d “
m”
in F
igu
re 1
. T
hes
e tw
o
regio
ns ar
e re
ferr
ed to
as t
he ”
maj
or g
roove”
an
d th
e “
min
or
gro
ov
e”, r
esp
ecti
vel
y.
Th
e m
ino
r gro
ove
is n
arro
w, w
hil
e th
e m
ajo
r gro
ove
is w
ider
, fi
lled
up
by t
he n
ucl
eoti
des
w
hic
h a
re b
ou
nd
bet
wee
n th
e b
ack
bo
nes
. T
he tw
o g
rooves
ar
e al
so d
isti
ng
uis
hed
by
th
e o
pp
osi
te d
irec
ted
nes
s of
th
e
sug
ar-p
ho
sph
ate
bac
kb
on
es o
n t
hei
r b
ou
nd
arie
s.
A r
o-
tati
on
of
the u
nd
isto
rted
mo
lecu
le a
rou
nd
eit
her
t o
r v b
y
180”
exch
ang
es t
he m
ajo
r an
d m
ino
r gro
oves
.
Ch
iral
po
lym
ers
wit
ho
ut
this
par
ticu
lar
bro
ken
sym
- m
etry
(e.
g. a
do
ub
le-h
elix
po
lym
er w
ith
in
dis
tin
gu
ish
able
b
ack
bo
nes
, an
d th
eref
ore
inv
aria
nt u
nd
er r
ota
tio
n b
y 18
0’
abo
ut t)
wil
l h
ave
A23 =
0.
Fin
ally
, o
ne
sho
uld
no
te t
ha
t re
flec
tio
ns
(use
ful
in d
eriv
atio
n o
f th
e e
last
ic e
ner
gy
of
thin
ro
ds
wit
h r
efle
ctio
n s
ym
met
ries
lO can
no
t b
e u
sed
to
an
aly
ze a
ch
iral
ro
d s
uch
as
DN
A.
Th
us,
the n
on
zero
ele
men
ts o
f th
en
= 2
ela
stic
co
nst
ant
mat
rix
are
All
, A22, A
33, an
d A
23.
Ph
ysi
call
y, A
11 an
d A
22
are
(dis
tin
ct)
ben
din
g c
on
stan
ts a
sso
ciat
ed w
ith
ben
ds
loca
lly
in th
e p
lan
es p
erp
end
icu
lar
to u a
nd
v, r
esp
ecti
vel
y.
We
exp
ect
thes
e co
nst
ants
to
be
app
rox
imat
ely
eq
ual
to
th
e b
end
per
sist
ence
len
gth
~5
00
A
.4 T
he c
on
stan
t A33 i
s ju
st t
he
tw
ist
rig
idit
y,
an
d i
s ro
ug
hly
eq
ual
to
th
e t
wis
t p
ersi
sten
ce l
eng
th 2
50
0 A
.4
In a
dd
itio
n t
o th
e b
end
ing
rig
idit
ies
an
d tw
ist
rig
idit
y,
we
hav
e a
cou
pli
ng
A23 o
f b
end
s ab
ou
t th
e lo
cal v
ax
is a
nd
th
e tw
ist in
the q
uad
rati
c (O
(Q2
))
elas
tic
theo
ry.
Its
ov
eral
l m
agn
itu
de
sho
uld
als
o b
e co
ntr
oll
ed b
y th
e d
egre
e by w
hic
h
rota
tio
ns
of
the m
ole
cule
by 180°
abo
ut
v a
nd
t a
re n
ot
sym
met
ries
. F
or
DN
A,
thes
e o
per
atio
ns
esse
nti
ally
ex-
chan
ge
the m
ajo
r an
d m
ino
r gro
oves
of t
he
mo
lecu
le, w
hic
h
are
rath
er d
iffe
ren
t in
str
uct
ure
: w
e th
us
exp
ect A
23 =
Ai,
.
~e3~e1
~e2
982 Marko and Siggia Macromolecules, Vol. 27, No. 4, 1994
V
Figure 1. Schematic diagram of the B-DNA molecule. The molecular diameter is d = 20 A, the helical repeat length is 1 = 27r/w0 = 34 A, corresponding to a stack of about 10.5 nucleic acid bases. The nucleotides are bound between the sugar-phosphate backbone helices: we note the arrows on the side view (upper portion of figure), which indicate the opposite directedness of the two helices. The wide major groove is marked “M”, while the narrower minor groove is marked “m”. The lower part of the figure shows the end view of B-DNA, with tangent t directed out of the page.
11. Elastic Free Energy of DNA
A. Symmetry Analysis. B-DNA molecules2 are right- handed chiral rods of cross-sectional diameter d = 21 A. As schematically shown in Figure 1, the pairs of nucleotides (occupying the major groove region, denoted M in Figure 1) are arranged in a helix with a pitch of about 1 = 34 A corresponding to a helical repeat every 10.5 base pairs (bp). We define the molecular axis (the center of the molecule) to be described by the space curve r(s), with s being arclength. The tangent t 1 dr/ds thus has unit length.
At any s, consider the plane perpendicular to t. The two sugar-phosphate backbones (the two helices, drawn with opposing arrows in Figure 1) intersect this plane at two points R and S. We define u to be the unit vector in this plane that points from the molecular axis to the
midpoint of E. A final unit vector v is defined by v = t X u so that the set (u, v, t) forms a right-handed coordinate system at each point s. It will be helpful to temporarily use indexed vectors e(l) u, e(2) = v, and e(3)
= t. A general deformation of the molecule that maintains
t2 = 1 may be described by infinitesimal rotations Q(s) of the coordinate axe^:^^^
de“’
ds -- - + ill x e“’
where 00 = 2* /1= 0.185 A-l determines the helical repeat length in the absence of deformations. We may think of the components Oi = il.eci) as “strains” which locally generate rotations of the coordinates around e(’). If Q = 0, the molecule takes its undistorted configuration shown in Figure 1. The molecular axis r(s) is obtained for general Q by integrating the tangent equation dr/ds = e(3).
The integral T w = L/1 + J ds Q 3 / ( 2 r ) is defined to be the double helix “twist”3 where L is the molecule length, and where the integral is from s = 0 to s = L. For an undistorted molecule, T w = L/1, and Tw just counts the number of helical turns of length 1 along the chain. For a distorted chain, the excess twist per helix repeat is (Tw - L/l)/(L/l) = ( Q 3 ) / ~ 0 , where we use the notation ( Q 3 ) = L-’J; ds Q3(s) to denote an average along the chain of length L >> 1.
Since we assume that the Q = 0 state is equilibrium, we may write the free energy for small strains as a Taylor expansion in a and its s derivatives.10 The lowest order
terms are
(2)
where we have introduced the matrices Aij and Aijk, which are symmetric under all permutations of their indices, and where the integral runs over the molecular axis of length L. If we ignore nucleotide-sequence dependence of the elastic properties of the molecule (or if we restrict our attention to symmetric repeats such as ($i)N then the A matrices have no s dependence, since in these coordi- nates, every point along the molecule in the undistorted state is equivalent. We will refer to these matrices as the “elastic constants”: they may depend on environmental factors (temperature, ionic strength, pH, etc.). We will ignore the constant free energy A0 for the remainder of this paper.
The second-order matrix has six independent components: All , A22, A33, A12, A139 and A23. We now show how symmetries make some of these components vanish. Note that rotation by 180’ around the vector u is a symmetry of the undistorted molecule (see Figure 1). Now consider an infinitesimal segment of length ds from s = -ds/2 to ds/2, with uniform strain Q = (01, 02, OS). Rotation of this segment by 180’ around u(s = 0) yields precisely the segment configuration with uniform strain il’ = ( 4 1 , Qz, O3). Therefore configurations D and D’ have the same free energy, indicating that A12 = A13 = 0.l’
We note that rotations by 180’ around either t(0) or v(0) do not take our infinitesimal distorted segment to a configuration with transformed D because these operations are not symmetries of the undistorted molecule. The lack of symmetry under these operations is due to the existence of two distinct regions of the DNA surface bounded by the two helices, marked “M” and “m” in Figure 1. These two regions are referred to as the ”major groove” and the “minor groove”, respectively. The minor groove is narrow, while the major groove is wider, filled up by the nucleotides which are bound between the backbones. The two grooves are also distinguished by the opposite directedness of the sugar-phosphate backbones on their boundaries. A ro- tation of the undistorted molecule around either t or v by 180” exchanges the major and minor grooves.
Chiral polymers without this particular broken sym- metry (e.g. a double-helix polymer with indistinguishable backbones, and therefore invariant under rotation by 180’ about t) will have A23 = 0. Finally, one should note that reflections (useful in derivation of the elastic energy of thin rods with reflection symmetrieslO cannot be used to analyze a chiral rod such as DNA.
Thus, the nonzero elements of then = 2 elastic constant matrix are All , A22, A33, and A23. Physically, A11 and A22
are (distinct) bending constants associated with bends locally in the planes perpendicular to u and v, respectively. We expect these constants to be approximately equal to the bend persistence length ~ 5 0 0 A.4 The constant A33 is just the twist rigidity, and is roughly equal to the twist persistence length 2500 A.4
In addition to the bending rigidities and twist rigidity, we have a coupling A23 of bends about the local v axis and the twist in the quadratic (O(Q2)) elastic theory. Its overall magnitude should also be controlled by the degree by which rotations of the molecule by 180° about v and t are not symmetries. For DNA, these operations essentially ex- change the major and minor grooves of the molecule, which are rather different in structure: we thus expect A23 =Ai,.
~e1
~e2
~e3
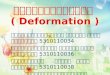
cross section
A12 = A13 = D1 = 0
Twist strain is measured relative to the
spontaneous twist
⌦3
d~eids
=⇣~⌦+ !0~e3
⌘⇥ ~ei
DNA has 2-fold rotational symmetry around axis . ~e1
E =
Z L
0
ds
2
A11⌦
21 +A22⌦
22 + C⌦2
3 + 2A23⌦2⌦3
+k✏2 + 2D2✏⌦2 + 2D3✏⌦3
�
Elastic energy for deforming DNA
k ⇠ 1000pN
C/kBT ⇠ 100nm
A11/kBT ⇡ A22/kBT = `p ⇠ 50nm
A23, D2 ⇠ 0D3/kBT ⇠ �20

22
Magnetic tweezers
Force on magnetic bead is proportional to the gradient of magnetic field and can be
adjusted by raising or lowering the magnet
Torque on magnetic bead can be produced by rotating the magnet.

23
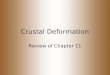
Twist-stretch coupling
attachment points at both ends suitable for MTs torque mea-surements by annealing two complementary single strands thatcarry multiple biotin or digoxigenin labels at their respective 5′ends (Fig. 1 C and D and Materials and Methods). The function-alized single-stranded constructs were generated by carrying outinitial in vitro transcription reactions that incorporated labelednucleotides and stalled at a missing fourth nucleotide (Fig. 1 C andD). After purification, transcription reactions were restarted andcompleted in the presence of all four unlabeled nucleotides. Thefinal annealed 4.2-kbp dsRNA constructs can be tethered betweenan anti-digoxigenin–coated flow cell surface and streptavidin-coated magnetic beads for manipulation in the MTs (Fig. 1E).
Force–Extension Response of dsRNA. Using the ability of MTs toexert precisely calibrated stretching forces (18, 19) (Materials andMethods and SI Appendix, Fig. S1), we first probed the force–extension response of dsRNA. The stretching behavior oftorsionally relaxed dsRNA at low forces (F < 5 pN) is well-described by the (inextensible) worm-like chain (WLC) model(20, 21) (SI Appendix, Fig. S2A). From fits of the WLC model, wedetermined the contour length LC = 1.15 ± 0.02 μm and thebending persistence length ARNA = 57 ± 2 nm in the presence of100 mM monovalent salt (SI Appendix, Fig. S2A), in good
agreement with the expected length (1.16 μm, assuming 0.28 nmper bp) (22, 23) and previous single-molecule stretching experi-ments (15, 16). ARNA decreases with increasing ionic strength(16) (SI Appendix, Fig. S1), in a manner well-described by modelsthat partition it into an electrostatic and a salt-independentcomponent (SI Appendix, Fig. S1K). Taking into account the saltdependence, ARNA is consistently ∼20% larger than ADNA at thesame ionic strength (SI Appendix, Fig. S1).Stretching dsRNA at forces >10 pN, we observed elastic
stretching that can be fit by the extensible WLCmodel (21, 24) upto∼40 pN (SI Appendix, Fig. S2B) and an overstretching transitionfor torsionally unconstrainedmolecules (SI Appendix, Fig. S2C), inagreement with previous single-molecule studies (16, 17). Fromfits of the extensibleWLCmodel, we found SRNA = 350 ± 100 pN,about threefold lower than SDNA (SI Appendix, Fig. S1G and TableS1). Our value for the SRNA is in reasonable agreement with, al-though slightly lower than, the value of SRNA∼500 pN determinedin single-molecule optical tweezers measurements (25), possiblydue to subtle differences between magnetic and optical tweezersexperiments. For torsionally unconstrained molecules, the over-stretching transition is marked by a rapid increase in extension to1.8 ± 0.1 times the crystallographic length over a narrow forcerange at F = 54 ± 5 pN (SI Appendix, Fig. S2C). In contrast, usingour torsionally constrained dsRNA, we observed enthalpicstretching beyond the contour length but no sharp overstretchingtransition up to F = 75 pN (SI Appendix, Fig. S2D). The increasedresistance to overstretching for torsionally constrained dsRNAcompared with torsionally unconstrained dsRNA is qualitativelysimilar to the behavior of dsDNA (26–28) (SI Appendix, Fig. S1Hand I). The dependence of the overstretching transition fordsRNA on torsional constraint and on salt (SI Appendix, Fig. S2Cand D) suggests that it might involve melting as well as a tran-sition to a previously unidentified conformation that we name“S-RNA,” in analogy to S-DNA (SI Appendix, Fig. S1).
Twist Response of dsRNA. We used the ability of MTs to controlthe rotation of the magnetic beads (18) to map out the responseof dsRNA upon over- and underwinding at constant stretchingforces. Starting with a torsionally relaxed molecule (correspondingto zero turns in Fig. 2), the tether extension remains initially ap-proximately constant upon overwinding (corresponding to in-creasing linking number) until the molecule reaches a bucklingpoint (Fig. 2A, dashed lines and SI Appendix, Fig. S3). Furtheroverwinding beyond the buckling point leads to a rapid linear de-crease of the tether extension with an increasing number of turns,due to the formation of plectonemes. The critical supercoilingdensity σbuck for buckling increases with stretching force and agreeswithin experimental error with the values found for DNA and witha mechanical model originally developed for supercoiled DNA (9)(Fig. 2B and SI Appendix,Materials and Methods). The decrease inextension per added turn in the plectonemic regime providesa measure for the size of the plectonemes and decreases with in-creasing stretching force (Fig. 2C). The extension vs. turns slopesfor dsRNA are within experimental error of those for dsDNA, andare in approximate agreement with the mechanical model forsupercoiling (Fig. 2C). Underwinding the dsRNA tether atstretching forces F < 1 pN gives rise to a buckling response similarto what is observed upon overwinding and the formation of neg-atively supercoiled plectonemes. In contrast, for F > 1 pN, theover- and underwinding response is asymmetric and the tetherextension remains approximately constant upon underwinding(Fig. 2A), likely due to melting of the double helix, as has beenobserved for DNA (29) (SI Appendix, Fig. S3 K and L).If unwinding at F > 1 pN is continued for several hundred
turns, we eventually observe another structural transition markedby an abrupt change in the extension vs. turns response at asupercoiling density of σ ∼ –1.9 (Fig. 2D). We term this previouslyunidentified highly underwound and left-handed RNA confor-mation with a helicity of –12.6 bp per turn “L-RNA,” in analogy towhat has been observed for highly underwound DNA (11) (SIAppendix, Fig. S3L). We note that the helicity and elongation that
Fig. 1. Construction of a torsionally constrained double-stranded RNA formagnetic tweezers measurements. (A) Comparison of A-form dsRNA [ProteinData Bank (PDB) ID code 1RNA (57)] and B-form dsDNA [PDB ID code 2BNA(58)]. (B) Cartoon of the elastic deformations of dsRNA: bending, stretching, andtwisting. (C) Schematic of the protocol to generate double-stranded RNAmolecules with multiple attachment points at both ends. Initial transcriptionreactions incorporate multiple biotinylated adenosine (green circles) or digoxi-genated uracil (yellow squares) bases and stall at a fourth nucleotide. Afterpurification, transcription reactions are restarted and complete the 4.2-kbptranscripts. In the final step, thepurifiedRNA strands are annealed to yield dsRNAwith chemical modifications at each end. (D) Schematic of the two DNA tem-plates used to generate dsRNA with multiple labels at both ends. (E) Cartoon ofa magnetic tweezers experiment on dsRNA (not to scale). A streptavidin-coatedmagnetic bead is tethered to an anti-digoxigenin–coated surface by a dsRNAmolecule with multiple attachment points at both ends. A surface-attached ref-erence bead is tracked simultaneously for drift correction. Permanent magnetsabove the flow cell are used to exert a stretching force F and to control the ro-tation of themagnetic bead via its preferred axism0. N, north pole; S, south pole.
Lipfert et al. PNAS | October 28, 2014 | vol. 111 | no. 43 | 15409
BIOPH
YSICSAND
COMPU
TATIONALBIOLO
GY
J. Lipfert et al., PNAS 111, 15408 (2014)
We determined the effective twist persistence length CRNAfrom the slopes in the linear torque–response regime, wherethe torque after N turns is 2π·N·kBT·CRNA/LC (where kB isBoltzmann’s constant and T is the absolute temperature; Fig. 3C,solid colored lines). CRNA increases with increasing force andis 99 ± 5 nm at F = 6.5 pN. Compared with dsDNA, CRNA issimilar to but slightly lower than CDNA, and both quantitiesexhibit similar force dependence, in qualitative agreementwith a model valid in the high force limit (37) (Fig. 3F and SIAppendix, Materials and Methods). Combining the results fromstretching and torque measurements at different forces, we de-lineate the phase diagram for dsRNA as a function of appliedforce and torque (Fig. 3G).
Twist–Stretch Coupling. The linear elastic rod model has a fourthparameter, D, that describes the coupling between twist andstretch. We measured the twist–stretch coupling for dsRNA bymonitoring changes in the extension upon over- and under-winding while holding the molecule at constant stretching forcesthat are large enough to suppress bending and writhe fluctua-tions (38, 39) (Fig. 4A). We found that for small deformations (inthe range –0.02 < σ < 0.025, which excludes the melting, buck-ling, and A-to-P–form transitions) dsRNA shortens upon over-winding, with a slope of (d∆L/dN)RNA = –0.85 ± 0.04 nm perturn, independent of stretching force in the range F = 4–8 pN(Fig. 4 B and C). This is in stark contrast to dsDNA, whichwe observed to lengthen upon overwinding by (d∆L/dN)DNA =+0.44 ± 0.1 nm per turn (Fig. 4 B and C), in good agreementwith previous measurements (38–41). Our measurements suggestthat dsRNA has a positive twist–stretch coupling equal to DRNA =–SRNA·(d∆L/dN)RNA/(2π·kBT) = +11.5 ± 3.3 (assuming SRNA = 350pN; SI Appendix,Materials and Methods), in contrast to the negativetwist–stretch coupling of dsDNA (38–41), DDNA = –17 ± 5.
Dynamics at the Buckling Transition. Next, we investigated the dy-namics at the buckling transition. When a dsRNA was twistedclose to the critical supercoiling density, we observed jumps in theextension traces, corresponding to transitions between the pre-and postbuckling states (Fig. 5A). Recording extension traces ata fixed number of applied turns, the population of the post-buckling state increases whereas the population of the prebuck-ling state decreases with an increasing number of applied turns(Fig. 5A). After selecting a threshold to separate the pre- andpostbuckling states (SI Appendix, Fig. S5 A–D), the pre- andpostbuckling populations and dwell time distributions can bequantified. The dependence of the postbuckling population onthe number of applied turns is well-described by a two-statemodel (42) (Fig. 5B and SI Appendix,Materials and Methods) fromwhich we determined the number of turns converted from twist towrithe during the buckling transition ΔNb ∼4 turns (SI Appendix,Fig. S5L). The dwell times in the pre- and postbuckling state areexponentially distributed (SI Appendix, Fig. S5 E–G), and theirmean residence times depend exponentially on the number ofapplied turns (Fig. 5C). We determined the overall characteristicbuckling times τbuck, that is, the dwell times at the point where thepre- and postbuckling states are equally populated, from fits ofthe exponential dependence of the mean residence times on thenumber of applied turns (Fig. 5C and SI Appendix, Materials andMethods). τbuck increases with increasing salt concentration andstretching force (Fig. 5E). The force dependence of τbuck is well-described by an exponential model (solid lines in Fig. 5E), τbuck =τbuck,0·exp(d·F/kBT); from the fit we obtain the buckling time atzero force τbuck,0 = 13 and 52 ms and the distance to the transitionstate along the reaction coordinate d = 5.1 and 5.5 nm for the 100and 320 mM monovalent salt data, respectively.Interestingly, comparing τbuck for dsRNA with dsDNA of
similar length under otherwise identical conditions (Fig. 5 D andE), we found that the buckling dynamics of dsRNA are muchslower than those of dsDNA, with the characteristic bucklingtimes differing by at least two orders of magnitude. For example,
we found τbuck = 10.1 ± 3.7 s for dsRNA compared with ∼0.05 sfor dsDNA at F = 4 pN and 320 mM salt (Fig. 5E).
DiscussionOur experiments are consistent with dsRNA behaving as a linearelastic rod for small deformations from the A-form helix, andallow us to empirically determine all four elastic constants ofthe model: A, S, C, and D (SI Appendix, Table S1). To go beyondthe isotropic rod model, toward a microscopic interpretationof the results, we describe a “knowledge-based” base pair-levelmodel that considers the six base-step parameters slide, shift,rise, twist, roll, and tilt (SI Appendix, Fig. S6 and Materials andMethods; a full description of modeling for a blind predictionchallenge is given in ref. 43). Average values and elastic cou-plings of the base-step parameters for dsRNA and dsDNA froma database of nucleic acid crystal structures are used in a MonteCarlo protocol to simulate stretching and twisting experiments (SIAppendix, Materials and Methods). This base pair-level modelcorrectly predicts the bending persistence length for dsRNA to beslightly larger than for dsDNA, SRNA to be at least a factor of twosmaller than SDNA, and C to be of similar magnitude for dsRNAand dsDNA (SI Appendix, Table S2). The significant difference instretch modulus S between dsRNA and dsDNA can be explainedfrom the “spring-like” path of the RNA base pairs’ center axis,compared with dsDNA (SI Appendix, Fig. S6B). Beyond theagreement with experiment in terms of ratios of dsRNA anddsDNA properties, the absolute values ofA, S, andC all fall withina factor of two of our experimental results for both molecules.Whereas the values for A, S, and C are fairly similar for
dsRNA and dsDNA, our experiments revealed an unexpecteddifference in the sign of the twist–stretch coupling D for dsRNAand dsDNA. The twist–stretch coupling has important biological
Fig. 4. Double-stranded RNA has a positive twist–stretch coupling. (A) Timetraces of the extension of a dsRNA tether held at F = 7 pN and underwound by−6 or overwound by 12 turns. Raw traces (120 Hz) are in red and filtered data(10 Hz) are in gray. The data demonstrate that dsRNA shortens when over-wound. (B) Changes in tether extension upon over- and underwinding at F = 7pN of a 4.2-kbp dsRNA and a 3.4-kbp dsDNA tether. Linear fits to the data(lines) indicate that the dsDNA lengthens by ∼0.5 nm per turn, whereas thedsRNA shortens by ∼0.8 nm per turn upon overwinding. Symbols denote themean and standard deviation for four measurements on the same molecule.(C) Slopes upon overwinding of dsRNA and dsDNA tethers as a function of F(mean and SEM of at least four molecules in TE + 100 mM NaCl buffer). Dataof Lionnet et al. (38) are shown as a black line with the uncertainty indicatedin gray; data from Gore et al. (39) are shown as a black square. The red line isthe average over all dsRNA data. (D) Models of oppositely twisting 50-bpsegments of dsDNA (Left) and dsRNA (Right) under 0 and 40 pN stretchingforces, derived from base pair-level models consistent with experimentalmeasurements (SI Appendix, Table S6 and Materials and Methods). The or-ange bars represent the long axis of the terminal base pair.
Lipfert et al. PNAS | October 28, 2014 | vol. 111 | no. 43 | 15411
BIOPH
YSICSAND
COMPU
TATIONALBIOLO
GY
�5 0 5 10
�15
�10
�5
0
5
turns
�L
[nm]
RNA DNA
Twist-stretch coupling has opposite sign for double stranded RNA and DNA!
F = 7pN bead is turned with a magnet
L+�L

24
Response of DNA to external forces and torques
~r(L) ~F
~M
E =
Z L
0
ds
2
A11⌦
21 +A22⌦
22 + C⌦2
3 + k✏2 + 2D3✏⌦3
��~F · ~r(L)
DNA torque
force
work due to external force and torqueDNA end to end distance
~e1~e2
~e3
~r(L) =
Z L
0ds
d~r
ds=
Z L
0ds ~e3(1 + ✏)
rotation of DNA end
~�(L) =
Z L
0ds
d~�
ds=
Z L
0ds ~⌦
� ~M · ~�(L)

25
Response of DNA to external forces and torques
~r(L) ~F
~M
DNA torque
force
~e1~e2
~e3
E =
Z L
0ds
✓1
2
A11⌦
21 +A22⌦
22 + C⌦2
3 + k✏2 + 2D3✏⌦3
�� ~F · ~e3(1 + ✏)� ~M · ~⌦
◆
The configuration of DNA that minimizes energy is described by Euler-Lagrange equations
E =
Z L
0ds g(✏,⌦1,⌦2,⌦3)
0 =d
ds
✓@g
@(d✏/ds)
◆� @g
@✏0 =
d
ds
✓@g
@(d�i/ds)
◆� @g
@�i
⌦i = d�/ds

26
Tension and torque along DNA backbone
~r(L) ~F
~M
DNA torque
force
~e1~e2
~e3
E =
Z L
0ds
✓1
2
A11⌦
21 +A22⌦
22 + C⌦2
3 + k✏2 + 2D3✏⌦3
�� ~F · ~e3(1 + ✏)� ~M · ~⌦
◆
0 =d
ds
✓@g
@(d✏/ds)
◆� @g
@✏
Euler-Lagrange equations
k✏(s) +D3⌦3(s) = ~F · ~e3(s)
tension along DNA
0 =d
ds
✓@g
@(d�i/ds)
◆� @g
@�i
⌦i = d�/ds
A11⌦1(s)~e1(s) +A22⌦2(s)~e2(s)
+ [C⌦3(s) +D3✏(s)]~e3(s) = ~M
torque along DNA
Euler-Lagrange equations thus describe local force and torque balance!

27
Twist-stretch coupling
J. Lipfert et al., PNAS 111, 15408 (2014)
We determined the effective twist persistence length CRNAfrom the slopes in the linear torque–response regime, wherethe torque after N turns is 2π·N·kBT·CRNA/LC (where kB isBoltzmann’s constant and T is the absolute temperature; Fig. 3C,solid colored lines). CRNA increases with increasing force andis 99 ± 5 nm at F = 6.5 pN. Compared with dsDNA, CRNA issimilar to but slightly lower than CDNA, and both quantitiesexhibit similar force dependence, in qualitative agreementwith a model valid in the high force limit (37) (Fig. 3F and SIAppendix, Materials and Methods). Combining the results fromstretching and torque measurements at different forces, we de-lineate the phase diagram for dsRNA as a function of appliedforce and torque (Fig. 3G).
Twist–Stretch Coupling. The linear elastic rod model has a fourthparameter, D, that describes the coupling between twist andstretch. We measured the twist–stretch coupling for dsRNA bymonitoring changes in the extension upon over- and under-winding while holding the molecule at constant stretching forcesthat are large enough to suppress bending and writhe fluctua-tions (38, 39) (Fig. 4A). We found that for small deformations (inthe range –0.02 < σ < 0.025, which excludes the melting, buck-ling, and A-to-P–form transitions) dsRNA shortens upon over-winding, with a slope of (d∆L/dN)RNA = –0.85 ± 0.04 nm perturn, independent of stretching force in the range F = 4–8 pN(Fig. 4 B and C). This is in stark contrast to dsDNA, whichwe observed to lengthen upon overwinding by (d∆L/dN)DNA =+0.44 ± 0.1 nm per turn (Fig. 4 B and C), in good agreementwith previous measurements (38–41). Our measurements suggestthat dsRNA has a positive twist–stretch coupling equal to DRNA =–SRNA·(d∆L/dN)RNA/(2π·kBT) = +11.5 ± 3.3 (assuming SRNA = 350pN; SI Appendix,Materials and Methods), in contrast to the negativetwist–stretch coupling of dsDNA (38–41), DDNA = –17 ± 5.
Dynamics at the Buckling Transition. Next, we investigated the dy-namics at the buckling transition. When a dsRNA was twistedclose to the critical supercoiling density, we observed jumps in theextension traces, corresponding to transitions between the pre-and postbuckling states (Fig. 5A). Recording extension traces ata fixed number of applied turns, the population of the post-buckling state increases whereas the population of the prebuck-ling state decreases with an increasing number of applied turns(Fig. 5A). After selecting a threshold to separate the pre- andpostbuckling states (SI Appendix, Fig. S5 A–D), the pre- andpostbuckling populations and dwell time distributions can bequantified. The dependence of the postbuckling population onthe number of applied turns is well-described by a two-statemodel (42) (Fig. 5B and SI Appendix,Materials and Methods) fromwhich we determined the number of turns converted from twist towrithe during the buckling transition ΔNb ∼4 turns (SI Appendix,Fig. S5L). The dwell times in the pre- and postbuckling state areexponentially distributed (SI Appendix, Fig. S5 E–G), and theirmean residence times depend exponentially on the number ofapplied turns (Fig. 5C). We determined the overall characteristicbuckling times τbuck, that is, the dwell times at the point where thepre- and postbuckling states are equally populated, from fits ofthe exponential dependence of the mean residence times on thenumber of applied turns (Fig. 5C and SI Appendix, Materials andMethods). τbuck increases with increasing salt concentration andstretching force (Fig. 5E). The force dependence of τbuck is well-described by an exponential model (solid lines in Fig. 5E), τbuck =τbuck,0·exp(d·F/kBT); from the fit we obtain the buckling time atzero force τbuck,0 = 13 and 52 ms and the distance to the transitionstate along the reaction coordinate d = 5.1 and 5.5 nm for the 100and 320 mM monovalent salt data, respectively.Interestingly, comparing τbuck for dsRNA with dsDNA of
similar length under otherwise identical conditions (Fig. 5 D andE), we found that the buckling dynamics of dsRNA are muchslower than those of dsDNA, with the characteristic bucklingtimes differing by at least two orders of magnitude. For example,
we found τbuck = 10.1 ± 3.7 s for dsRNA compared with ∼0.05 sfor dsDNA at F = 4 pN and 320 mM salt (Fig. 5E).
DiscussionOur experiments are consistent with dsRNA behaving as a linearelastic rod for small deformations from the A-form helix, andallow us to empirically determine all four elastic constants ofthe model: A, S, C, and D (SI Appendix, Table S1). To go beyondthe isotropic rod model, toward a microscopic interpretationof the results, we describe a “knowledge-based” base pair-levelmodel that considers the six base-step parameters slide, shift,rise, twist, roll, and tilt (SI Appendix, Fig. S6 and Materials andMethods; a full description of modeling for a blind predictionchallenge is given in ref. 43). Average values and elastic cou-plings of the base-step parameters for dsRNA and dsDNA froma database of nucleic acid crystal structures are used in a MonteCarlo protocol to simulate stretching and twisting experiments (SIAppendix, Materials and Methods). This base pair-level modelcorrectly predicts the bending persistence length for dsRNA to beslightly larger than for dsDNA, SRNA to be at least a factor of twosmaller than SDNA, and C to be of similar magnitude for dsRNAand dsDNA (SI Appendix, Table S2). The significant difference instretch modulus S between dsRNA and dsDNA can be explainedfrom the “spring-like” path of the RNA base pairs’ center axis,compared with dsDNA (SI Appendix, Fig. S6B). Beyond theagreement with experiment in terms of ratios of dsRNA anddsDNA properties, the absolute values ofA, S, andC all fall withina factor of two of our experimental results for both molecules.Whereas the values for A, S, and C are fairly similar for
dsRNA and dsDNA, our experiments revealed an unexpecteddifference in the sign of the twist–stretch coupling D for dsRNAand dsDNA. The twist–stretch coupling has important biological
Fig. 4. Double-stranded RNA has a positive twist–stretch coupling. (A) Timetraces of the extension of a dsRNA tether held at F = 7 pN and underwound by−6 or overwound by 12 turns. Raw traces (120 Hz) are in red and filtered data(10 Hz) are in gray. The data demonstrate that dsRNA shortens when over-wound. (B) Changes in tether extension upon over- and underwinding at F = 7pN of a 4.2-kbp dsRNA and a 3.4-kbp dsDNA tether. Linear fits to the data(lines) indicate that the dsDNA lengthens by ∼0.5 nm per turn, whereas thedsRNA shortens by ∼0.8 nm per turn upon overwinding. Symbols denote themean and standard deviation for four measurements on the same molecule.(C) Slopes upon overwinding of dsRNA and dsDNA tethers as a function of F(mean and SEM of at least four molecules in TE + 100 mM NaCl buffer). Dataof Lionnet et al. (38) are shown as a black line with the uncertainty indicatedin gray; data from Gore et al. (39) are shown as a black square. The red line isthe average over all dsRNA data. (D) Models of oppositely twisting 50-bpsegments of dsDNA (Left) and dsRNA (Right) under 0 and 40 pN stretchingforces, derived from base pair-level models consistent with experimentalmeasurements (SI Appendix, Table S6 and Materials and Methods). The or-ange bars represent the long axis of the terminal base pair.
Lipfert et al. PNAS | October 28, 2014 | vol. 111 | no. 43 | 15411
BIOPH
YSICSAND
COMPU
TATIONALBIOLO
GY
�5 0 5 10
�15
�10
�5
0
5
turns
�L
[nm]
Twist-stretch coupling has opposite sign for double stranded RNA and DNA!
F = 7pN bead is turned with a magnet
L+�L
k✏(s) +D3⌦3(s) = ~F · ~e3(s)
⌦3 = 2⇡Nturns/L
�L = L✏ =FL
k� 2⇡D3
kNturns

28
force
F < Fcr
force
F > Fcrzx
y
F F
z(L) z(L)
Assume the very thin beam (filament) limit with ✏ ! 0
Analyze the stability of flat configuration by investigating the energy cost of slightly deformed profile with
~r(s) = (0, y(s), z(s))
~e3 =d~r
ds= (0, y0, z0) z0 =
p1� y02 z(s) =
Z s
0d`p
1� y0(`)2
Bending strain
⌦2 =1
R2=
✓d2~r
ds2
◆2
= y002+ z00
2=
y002
1� y02
Euler buckling instability

29
force
F < Fcr
force
F > Fcrzx
y
F F
z(L) z(L)
Assume small deformations around the flat configuration
y(s) =X
q
eiqsy(q) analyze with Fourier modes
Buckled configurations have lover energy for
F > Fcr = Aq2minE ⇡ +FL+X
q
1
2
�Aq4 � Fq2
�|y(s)|2
E ⇡Z L
0ds
1
2Ay00
2 � 1
2Fy02 + F
�
E =
Z L
0ds
A
2⌦2 + Fz(L) =
Z L
0ds
A
2
y002
(1� y02)+ F
p1� y02
�
Note: buckling direction corresponds to the lower value of bending rigidity A
Euler buckling instability

30
Euler buckling instabilityclamped
boundaries
Fcr =4⇡2A
L2
y(0) = y0(0) = y(L) = y0(L) = 0
qmin = 2⇡/L
hinged boundaries
qmin = ⇡/L
y(0) = y00(0) = y(L) = y00(L) = 0
Fcr =⇡2A
L2
one end clamped the other free
Fcr =⇡2A
4L2
qmin = ⇡/2L
y(0) = y0(0) = y00(L) = y000(L) = 0
The amplitudes of buckled modes are determined by the 4th order terms in
energy functional that we ignored
E ⇡Z L
0ds
A
2y002(1 + y02) + F
✓1� 1
2y02 +
1
8y04
◆�
y(qmin) /q(F �Aq2min)/(Aq4min)

31
Torsional instabilityM < Mcr M > Mcr
plectoneme
torque
torque
critical torque for clamped boundaries
number of turnsthat lead to torsional instability
Mcr ⇡ 9A
LNturns =
L⌦3
2⇡=
LMcr
2⇡C⇡ 1.4
A
C

32
Twist, Writhe and Linking numbersLn=Tw+Wr linking number: total number of turns of a particular endTw =
R L0 ds⌦3(s)/2⇡ twist: number of turns due to twisting the beam
Wr writhe: number of crossings when curve is projected on a plane

33
Torsional instability
M < Mcr
M > Mcr
plectoneme
torque
torque
F
F
E =CL[2⇡Ln]2
2E =
CL[2⇡ (Ln�Wr)]2
2+ Ebend + F�L
Torsional instability occurs, because part of the twisting energy can be released by bending and forming a plectoneme.
Pulling force suppresses instability.
�L

34J. Lipfert et al., PNAS 111, 15408 (2014)
implications, such as for how mutations affect binding sites, be-cause a base pair deletion or insertion changes not only thelength but also the twist of the target sequence, changes thatneed to be compensated by distortions of the nucleic acid uponprotein binding (39). Nevertheless, accounting for the twist–stretch coupling D in a model of nucleic acid elasticity appearsto be challenging. Previous elastic models originally developedfor dsDNA (44, 45) predict a positive twist–stretch couplingfor dsRNA, in agreement with our measurements for DRNA al-though at odds with the results for dsDNA (SI Appendix, Mate-rials and Methods). In contrast, elastic models that consider a stiffbackbone wrapped around a softer core give negative D pre-dictions for both dsRNA and dsDNA (39, 46). Likewise, the basepair-level Monte Carlo model yields a negative twist–stretch cou-pling for both dsDNA and dsRNA, disagreeing with the positivesign we observe for DRNA (SI Appendix, Table S2), although wenote that relatively modest changes to the base-step parameterscan reproduce the experimentally observed value for DRNA(Fig. 4D and SI Appendix, Materials and Methods). Interestingly,an all-atom, implicit-solvent model of dsDNA homopolymersfound A-form dsDNA to unwind upon stretching whereas B-formdsDNA overwound when stretched close to its equilibrium con-formation (47). Although these simulation results are in qualitativeagreement with our findings for A-form dsRNA and B-formdsDNA, their simulation predicts un- and overwinding, respectively,by ∼3° per 0.1 nm, which corresponds to values of jDj ∼50, namely
a factor of three to five larger in magnitude than the experimen-tally observed values forDRNA andDDNA. In summary, a completemicroscopic understanding of the twist–stretch coupling for bothdsRNA and dsDNA may require higher-resolution (all-atom,explicit-solvent) models and novel experimental methods.A second surprising contrast between dsRNA and dsDNA is
the much slower buckling dynamics for dsRNA. The two ordersof magnitude difference in τbuck is particularly astonishing, be-cause the parameters that characterize the end points of thebuckling transitions and the difference between them, such asσbuck (Fig. 2B), Γbuck (Fig. 3E), the extension jump (SI Appendix,Fig. S5I), and ΔNb (SI Appendix, Fig. S5L), are all similar (withinat most 20–30% relative difference) for dsRNA and dsDNA.Several models that describe the buckling transition in an elasticrod framework (characterized by A and C) find reasonable agree-ment between experimental results for dsDNA and the parame-ters that characterize the end points of the buckling transition (42,48–50). In contrast, there is currently no fully quantitative modelfor the buckling dynamics. A recent effort to model the timescaleof the buckling transition for dsDNA found submillisecondbuckling times, much faster than what is experimentally observed,suggesting that the viscous drag of the micrometer-sized beads orparticles used in the experiments might considerably slow downthe observed buckling dynamics for dsDNA (48).The observed difference in τbuck suggests that the transition
state and energy barrier for buckling are different for dsRNA anddsDNA. We speculate that because the transition state mightinvolve sharp local bending of the helix (on a length scale of ∼5nm, suggested by the fit to the force dependence; Fig. 5E), theobserved difference might possibly be due to high flexibility ofdsDNA on short length scales, which would lower the energeticcost of creating sharp transient bends. An anomalous flexibility ofdsDNA on short length scales is hotly debated (51), and has beensuggested by different experiments, including cyclization assays inbulk using ligase (52) or at the single-molecule level using FRET(53), small-angle X-ray scattering measurements on gold-labeledsamples (54), and atomic force microscopy imaging of surface-immobilized DNA (55), even though the evidence remains con-troversial (51). If the observed difference in τbuck betweendsDNA and dsRNA is indeed due to an anomalous flexibility ofdsDNA on short length scales, a clear prediction is that similarexperiments for dsRNA should fail to observe a correspondinglevel of flexibility. In addition, this striking, unpredicted differ-ence between dsDNA and dsRNA again exposes a critical gap incurrent modeling of nucleic acids.In conclusion, we have probed the elastic responses and struc-
tural transitions of dsRNA under applied forces and torques. Wefind the bending and twist persistence lengths and the force–tor-que phase diagram of dsRNA to be similar to dsDNA and thestretch modulus of dsRNA to be threefold lower than that ofdsDNA, in agreement with base pair-level model predictions.Surprisingly, however, we observed dsRNA to have a positivetwist–stretch coupling, in agreement with naïve expectations but incontrast to dsDNA and to base pair-level modeling. In addition,we observe a striking difference of the buckling dynamics fordsRNA, for which the characteristic buckling transition time is twoorders of magnitude slower than that of dsDNA. Our resultsprovide a benchmark and challenge for quantitative models ofnucleic acid mechanics and a comprehensive experimental foun-dation for modeling complex RNAs in vitro and in vivo. In addi-tion, we envision our assay to enable a new class of quantitativesingle-molecule experiments to probe the proposed roles of twistand torque in RNA–protein interactions and processing (4, 56).
Materials and MethodsSee SI Appendix, Materials and Methods for details. In brief, the double-stranded RNA constructs for magnetic tweezers experiments were generatedby annealing two 4,218-kb complementary single-stranded RNA molecules thatcarry multiple biotin or digoxigenin labels at their respective 5′ ends (Fig. 1C).The product of the annealing reaction is a 4,218-bp (55.6% GC content) fullydouble-stranded RNA construct with multiple biotin labels at one end and
Fig. 5. Slow buckling transition for dsRNA. (A) Time traces of the extensionof a 4.2-kbp dsRNA tether for varying numbers of applied turns (indicated onthe far right) at the buckling transition for F = 2 pN in 320 mM NaCl. (Right)Extension histograms (in gray) fitted by double Gaussians (brown lines). Rawdata were acquired at 120 Hz (gray) and data were filtered at 20 Hz (red).(Inset) Schematic of the buckling transition. (B) Fraction of the time spent inthe postbuckling state vs. applied turns for the data in A and fit of a two-statemodel (black line; SI Appendix, Materials and Methods). (C) Mean residencetimes in the pre- and postbuckling state vs. applied turns for the data in Aand fits of an exponential model (lines; SI Appendix, Materials and Meth-ods). (D) Extension vs. time traces for dsRNA (red) and dsDNA (blue) both atF = 4 pN in TE buffer with 320 mM NaCl added. Note the different timescalesfor dsRNA and dsDNA. (E) Characteristic buckling times for 4.2-kbp dsRNA inTE buffer with 100 mM (red points) and 320 mM (orange points) NaCl added(mean and SEM of at least four independent molecules). Solid lines are fits ofan exponential model. Measurements with 3.4-kbp dsDNA tethers in 320 mMNaCl at F = 4 pN yielded characteristic buckling times of ∼50 ms (horizontaldashed line); however, this value represents only an upper limit, because ourtime resolution for these fast transitions is biased by the acquisition frequencyof the CCD camera (120 Hz). For comparison, we show data for 10.9- and 1.9-kbp DNA (upper and lower triangles, respectively) from ref. 42.
15412 | www.pnas.org/cgi/doi/10.1073/pnas.1407197111 Lipfert et al.
Stochastic switching between two states near instability for twisting RNA
puling force F = 2pN
pplectoneme
(Nturns
) = e�Eplectoneme
(Nturns
)/kBT
e�Estraight
(Nturns
)/kBT+e�E
plectoneme
(Nturns
)/kBT
probability of observing a plectoneme