Embed Size (px)
Citation preview

Lw
AT
a
ARR2AA
KDSDLGW
1
ibrw(oeoetsspi
nin
dt
0d
Electric Power Systems Research 84 (2012) 72– 82
Contents lists available at SciVerse ScienceDirect
Electric Power Systems Research
jou rn al h om epa ge: www.elsev ier .com/ locate /epsr
oad reallocation based algorithm for state estimation in distribution networksith distributed generators
ndrija T. Saric ∗, Aleksandar Rankovicechnical Faculty Cacak, University of Kragujevac, Serbia
r t i c l e i n f o
rticle history:eceived 31 December 2010eceived in revised form2 September 2011ccepted 9 October 2011vailable online 8 November 2011
a b s t r a c t
In this paper is proposed a novel branch flow and weighted least square (WLS) based algorithm for stateestimation in three phase distribution networks with distributed generation (DG) units. The basic for-mulation is simplified by the use of radial property of distribution network and later will be extended tomeshed networks. Unmonitored (or partially monitored) loads are initially estimated from normalizeddaily load profiles (NDLPs) with lower weights (treated as the pseudo measurements). Also, the differ-ent types of monitored, partially monitored, or unmonitored DG units are included in state estimation.Their initial power outputs are calculated on the basis of external inputs, such as wind, sun and water
eywords:istribution networkstate estimationistributed generationoad allocation
inflow forecasts etc. (depending on DG unit type) or by normalized daily generation profiles (NDGPs)obtained from historical generation data. The pseudo measurements obtained by Initial Load/GenerationAllocation are re-adjusted additionally by Optimal Load/Generation Reallocation procedure to fit real-time measurements inside WLS-based state estimation. The results and practical aspects of the proposed
trate
eneration allocationeighted least squaremethodology are demons
. Introduction
Operation strategy for distribution systems has been changingn modern environment. Two major challenges exist: deregulatedusiness environment and an increase of energy production fromenewable resources. This requires monitoring and control of net-ork by means of a modern Distribution Management System
DMS) at system and substation levels. State estimation shouldbviously be at the heart of the DMS technology. However, due toconomic reasons, a large part of distribution network continues toperate as unmonitored, or partially monitored, having an adverseffect on the accuracy and quality of the state estimation andherefore its usefulness in system operation. The real-time mea-urements in distribution networks are usually limited to sourceubstation, head of feeders, larger renewable resources (for exam-le, wind farms, or solar plants), larger consumers (for example,
ndustrial), etc.This condition will be improving year by year. However, it is
ot reasonable to expect that, in the near future, the redundancyn distribution networks will be similar to the ones in transmissionetworks (≥2).
A deficit of real-time measurements makes state estimation inistribution networks a very specific and difficult problem and aopic of numerous researches (for overview, see [1]).
∗ Corresponding author. Tel.: +381 32 302 748; fax: +381 32 342 101.E-mail address: [email protected] (A.T. Saric).
378-7796/$ – see front matter © 2011 Elsevier B.V. All rights reserved.oi:10.1016/j.epsr.2011.10.003
d on two real-life distribution networks.© 2011 Elsevier B.V. All rights reserved.
In the classical deterministic domain, a few methodologies forstate estimation, which respect the above-mentioned deficit ofreal-time measurements, are proposed [2–7]. These methodologiesuse the conventional techniques for state estimation in transmis-sion networks, based on branch current calculations and weightedleast square (WLS) approach. However, classical methods do notrespect the uncertainty of correlation between historical data (rep-resented by pseudo measurements) and data obtained by real-timemeasurements.
Approaches proposed in [8–10] respect data uncertainty in loadestimation procedure by fuzzy sets, or Gaussian mixture model,respectively. However, the concept of conforming distributionloads is very unlikely in practice, since the consumer load primarilydepends on consumers’ structure.
In order to improve the redundancy of measurements, usu-ally unavailable measurements could be replaced by normalizeddaily load profiles (NDLPs) and normalized daily generation pro-files (NDGPs) (treated as the pseudo measurements) and zero nodeinjections (treated as the virtual measurements) [9–14]. Theseprocedures (denoted as “load allocation”) are very important forimproving of the estimation accuracy.
Algorithms for state estimation adopted for unbalanced distri-bution networks are analyzed in [10,14].
In this paper is proposed a novel approach for state estimation
in symmetrical three-phase distribution networks, where pseudomeasurements in Optimal Load/Generation Reallocation proce-dure are additionally re-adjusted inside the WLS-based algorithmto fit real-time measurements. The reallocation is an important
ower Systems Research 84 (2012) 72– 82 73
seitwoh
w(iacfftcpta
twao
2irssEFid
2
mt5nrpemfimtrpicurcotnt(tam
ppi
[p.u. STni]
t t
ppi(t)
1,0
1
where general equation for power factor for load in the i-th node is
cos ϕi = Ppi√P2
pi+ Q 2
pi
. (5)
Non-conforming real loads are specified by individual 24-h
A.T. Saric, A. Rankovic / Electric P
tep in cases where multiple real-time measurements along feed-rs are available. Unmonitored, or partially monitored loads arenitially estimated from NDLPs for real powers (with introducedhe assumption that the power factors are constant) with lowereights (treated as the pseudo measurements). The application
f NDLPs drastically reduces a number of different saved cases inistorical database [15].
The amount of DG units rapidly increases in distribution net-orks year by year, in which a part of them can be monitored
for example, wind farms and photovoltaic plant), or unmon-tored (usually single and/or small-scale DG units over largereas). The initial real power output of unmonitored DG unitsan be calculated based on a forecast (for example, the weatherorecast for wind farms and photovoltaic plants), or estimatedrom NDGPs obtained from analysis of the historical genera-ion database (similarly as for loads using the NDLPs). In bothases, these values can be represented in state estimation as theseudo measurements. Additionally, the real power node injec-ion can be re-adjusted by Optimal Load/Generation Reallocationlgorithm.
The modeling of different types of monitored, partially moni-ored and unmonitored DG units in state estimation was analyzed:ind generators and/or farms, photovoltaic plants, micro-, mini-
nd medium-scale hydro power plants, biomass generation basedn micro turbines etc.
The rest of the paper is organized as follows. In Section will be presented development of the model, followed by
ts extension to DG units in Section 3. In Section 4 the algo-ithm for WLS- and Optimal Load/Generation Reallocation basedtate estimation will be explained. In Section 5 will be demon-trated the results for two real-life distribution systems (fromlectric Power Industry of Serbia) with 40 and 322 nodes.inally, in Section 6 main conclusions will be provided, whilen Appendix A the model of asynchronous generator will beerived.
. Model development
Possible locations and types of real-time, pseudo and virtualeasurements in typical distribution network topology are illus-
rated on single-line diagram of the first test example (in Section.1), in which normally opened switches determine the actualetwork topology. Usually, use of virtual (zero injections) andeal-time measurements leads to a local redundancy (for exam-le, around the source substation), but not a global one, sincexist the originally unobservable parts (without pseudo measure-ents) in the distribution network (see single-line diagram for
rst test example in Section 5.1). Introduction of pseudo measure-ents (for unmonitored loads and DG units), formally increases
he redundancy, which enables the application of WLS-based algo-ithms for state estimation [16]. However, a large number ofseudo measurements typically have low accuracy (small weight-
ng factors in WLS-based optimization) that could destroy theonvergence of the algorithm, due to the low correlation amongsed values of real-time, pseudo and virtual measurements. Theeason is that values obtained from NDLPs and NDGPs (histori-al load/generation data and characteristic in-field experiments),r calculated for DG units based on a forecast (for example,he weather forecast for wind and solar based production), areot directly related to the real-time measurements. Therefore, inhis paper the pseudo measurements are adaptively re-adjusted
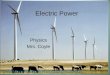
by Optimal Load/Generation Reallocation procedure) accordingo the real-time measurements, so that load and generations seen at measurement points match the available real-timeeasurements.Fig. 1. Normalized daily load profile (NDLP).
2.1. Normalized daily load profiles (NDLPs)
24-h typified load curve (daily load profile) according to theload type (residential, commercial, industrial, etc.), day type (week-day, weekend, holiday, etc.) and season (summer, winter, autumn,and spring) is adopted. By introducing the characteristic types ofNDLPs, the number of different cases saved in historical databaseis significantly reduced (see Section 5).
The real load diagrams (saved in historical database) are scaledto the nominal voltage (Vn) and the nominal rating of distributiontransformer (STn), which means that the value at nominal voltagefor load in the i-th node (mixed constant power, constant currentand constant impedance models) is
P(Vin)pi = cPiP
(Vin)pPi + cIiP
(Vin)pIi + cZiP
(Vin)pZi = (cPippPi + cIippIi + cZippZi)STni,
(1)
in which for parts of constant real power, current or impedanceload models following equation holds
cPi + cIi + cZi = 1. (2)
From (1) we can make a conclusion that load can be computedas the nominal rating of distribution transformer (STni) multipliedby the relative loading factor (ppi), which is determined as the perunit loading from its NDLP at the time of study [ppi = ppi(t)]. Thisapproach is illustrated in Fig. 1.
If the load forecast is available for whole or parts of consump-tion areas, then Initial Load Allocation obtained by NDLPs can beadditionally scaled to satisfy the forecasted values.
From (1) the voltage dependence of nodal real load is
P(Vi)pi = [cPippPi + cIippIi
√V2
ai+ V2
ri+ cZippZi(V
2ai + V2
ri)]STni. (3)
For constant power factor (cos ϕi = Const.), the voltage depen-dent nodal reactive load is
Q (Vi)pi = ±
√1 − cos ϕ2
i
cos ϕ2i
P(Vi)pi = ± tan ϕiP
(Vi)pi , (4)
schedule according to the day and season types.In addition, the non-conforming load may have real-time
measurement, which overwrites the load schedule (obtained byNDLPs).

7 ower S
2
s
-
-
a
z
i
-
-
-
bom(
tvtmt
n
x
l
•
•
•
4 A.T. Saric, A. Rankovic / Electric P
.2. Measurement and state vectors
The vector of measurements (z) consists of the following mea-urement types:
Branch measurements: real and reactive power flows (Pb�, Qb�)and current flows (Ib�).
Node measurements: real and reactive power injections (Pi, Qi),current injections (Ii) and node voltages (Vi),
nd can be represented as
= [ PTb Q T
b ITb PT Q T IT VT ]
T. (6)
Above types of the measurements are classified into the follow-ng three groups:
Real-time measurements (denoted as ‘rt’), performed in-field onmonitored elements (usually available at source substation, headof feeders and larger loads/generators).
Pseudo measurements (denoted as ‘p’), obtained by OptimalLoad/Generation Reallocation algorithm (described in Sections2.4 and 3.4).
Virtual measurements (denoted as ‘v’), obtained as zero real andreactive injections in nodes without load/generation.
All measurements (vector zrt+p+v) were used in proposed WLS-ased state estimation. For Optimal Load/Generation Reallocationnly a part of vector zrt+p+v composed from real-time measure-ents was used. This part consist of set of real-time branch flows
Pb, Qb and Ib) and node voltage (V) measurements, and constitutes
he reduced subvector z′rt = [ PT
b Q Tb IT
b VT ]T. Note that node
oltage measurement is assigned to the branch ended in node withhis measurement. These branch flow and node voltage measure-
ents have significant impact on downstream nodes (compared tohe real/reactive/current injection measurements).
State vector consists of node voltage active and reactive compo-ents (rectangular coordinates)
= [ Va1 Vr1 Va2 Vr2 · · · VaN VrN ]T. (7)
With regard to availability of real-time measurements, the fol-owing classification of loads/DG units is applied:
Completely monitored, where number of real-time measurementsis equal to or larger than number of state variables in the nodewhere load/DG unit is connected to the network. In this case,the pseudo measurements obtained by Optimal Load/GenerationReallocation procedure (described in Sections 2.4 and 3.4) are notused.Partially monitored, where number of real-time measurements isless than the number of state variables in the node where load/DGunit is connected to the network. In this case, the availablereal-time measurements and the necessary number of pseudomeasurements (to satisfy the condition where the total numberof real-time and pseudo measurements is equal to the number of
state variables) is used.Unmonitored, where all measurements are classified aspseudo (obtained by Optimal Load/Generation Reallocationalgorithm).ystems Research 84 (2012) 72– 82
2.3. Measurements-state variables model
For measurements-state variables model, h(x), Jacobian matrixis
H = ∂h(x)∂x
=
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
∂Pb/∂Va ∂Pb/∂Vr
∂Q b/∂Va ∂Q b/∂Vr
∂Ib/∂Va ∂Ib/∂Vr
∂P/∂Va ∂P/∂Vr
∂Q/∂Va ∂Q /∂Vr
∂I/∂Va ∂I/∂Vr
∂V/∂Va ∂V/∂Vr
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
, (8)
where sensitivities ∂hm(x)/∂Vai and ∂hm(x)/∂Vri are derived basedon the standard power flow equations for three-phase radial net-works [16].
2.4. Optimal Load Reallocation (part of Optimal Load/GenerationReallocation algorithm)
Data from historically based NDLPs is not related to the real-time measurements directly and sometimes can be inconsistentwith them. In addition, the estimation of particular node load canbe subjected to the several real-time measurements that are in thepath to the source substation. Then, the convergence problems inWLS-based algorithm typically could appear.
Proposed Optimal Load Reallocation procedure is based only ona part of the real-time measurements [subvector z′
rt determined bybranch flow and node voltage measurements (defined in Section2.2)], since influence of injection measurements on the reallocationprocedure is negligible.
All network nodes are divided into unique sets regarding theinfluence of the real-time measurements (as illustrated on single-line diagram for first test example in Section 5.1). Members of theunique nodal set for the m-th available real-time measurementin �-th branch can be obtained from downstream nodal real-timemeasurement (s ∈ Cm) sets (As
�) as follows
A′m� = Am
� −∑s ∈ Cm
As�, (9)
where Am(s)�
is vector of downstream nodes flowing over � − thbranch with m-th (s-th) real-time measurement. This vector can beobtained very simple as a post-processing step, applied on the stan-dard branches-nodes incidence matrix (A) in DMS-based TopologyAnalysis function. For layer-based numeration of nodes (see single-line diagram for first test example in Section 5.1), the Eq. (9) isperformed by backward substitution (starting from real-time mea-surements in the last layer).
Vector A′m� is sparse (with nonzero elements for nodes subjected
only to the m-th measurement), therefore only nonzero elementsmust be saved [and used later in Eq. (13)].
Multiple measurements per location (for example, paired mea-surements of real and reactive power flows) generate the same setof nodes (equal vectors A′m
� ).Respecting the defined subvector z′
rt included into Optimal LoadReallocation procedure, the measurements-node real loads model,g(P), can be simply derived from the measurements-state variablesmodel [h(x) in Eq. (8)]. Then, the increment of the m-th mea-surement can be calculated in the function of node load/injectionincrements by the linear equation, as follows
�z′rt,m =
N∑i=1
Kmi �Pi = −N∑
i=1
Kmi �Ppi, (10a)

ower S
o
�
wm
K
wp[
1
�
wwb
K
w
�
w
K
tmW
�
martt
3
t
3
fo
P
A.T. Saric, A. Rankovic / Electric P
r in matrix notation
z′rt = K �P = −K �Pp, (10b)
here Jacobian matrix for measurements-node real injectionsodel [g(p)] is
= ∂g(P)∂P
=
⎡⎢⎢⎢⎣
∂Pb/∂P
∂Q b/∂P
∂Ib/∂P
∂V/∂P
⎤⎥⎥⎥⎦ , (11)
here sensitivities Kmi = ∂gm(Pi)/∂Pi are derived from the standardower flow equations for three phase radial distribution networks16].
For unique identified areas (sets of nodes A′m� ), n =
, 2, . . . , Narea, we can write a linear equation
z′rt,m = −
Narea∑n=1
Kareamn �Parea
pn , (12)
here �Pareapn is an equivalent load increment in the n-th area,
hile the equivalent sensitivity coefficient Kareamn can be calculated
y following formula
areamn =
∑Ni=1A′m
�iKmi∑Ni=1A′m
�i
. (13)
Finally, the system of equations for increments (12) can be re-ritten in matrix form for reallocation areas as
z′rt = K ′area �Parea = −K ′area �Parea
p . (14)
here K ′area is a matrix with elements:
′areamn =
{Karea
mn if n ∈ S�
0 otherwise. (15)
If there is only one measurement per a measurement location,he system of equations (14) has a unique solution. Otherwise, for
ultiple measurements per measurement location, we have theLS-based optimization problem
minParea
p
{J(�Pareap ) = [�z′
rt + K ′area �Pareap ]
TR−1
rt [�z′rt
+K ′area �Pareap ]}. (16)
As a result of the optimization in (16), the area’s real load incre-ents (�Parea
pn , n = 1, 2, . . . , Narea) are obtained. These incrementsre distributed to the corresponding area’s member nodes (�Ppi),especting to the level of real loads (from the previous iteration inhe algorithm that should be explained in Section 4.1). Similarly,he reactive load increments (�Qpi) were calculated by (4).
. Treatment of distributed generation (DG) units
There are different types of DG units, and the following charac-eristic models should be applied.
.1. RX nodes for DG units based on asynchronous generator
The typical examples for RX nodes are wind generators (orarms) and small-scale hydro power plants (several hundreds kVAs
f rated power or less).The power of asynchronous generator (P ′g) is [17]
′g ≈ Pt, (17)
ystems Research 84 (2012) 72– 82 75
where initial estimation of the wind turbine output real power (Pt)is extracted from the airflow (Pt = Pw) and related to the wind speedat turbine blades (v), as follows [17]
Pw = 0.5�aAwcp(�)v3 [kW], (18)
where tip speed ratio of wind turbine (�) is defined as
� = ωRR
v. (19)
Usually, the power coefficient cp(�) in (18) is defined by a setof curves [17]. These curves were approximated by n-dimensionalpolynomial function cp(�) =
∑nk=0ak�k, where ak are coefficients
obtained by minimum least-square deviations. Then, the power Pw
from (18) can be written as follows
Pw = 0.5�aAw
n∑k=0
ak(ωRR)kv3−k. (20)
Wind speed at turbine blades (v) is obtained by three-dimensional spatial numerical weather predictions [18].
Similarly, for small-scale hydro turbine (Pt = Ph) without reser-voir we have [19]
Ph = �hghqhhh [KW]. (21)
The DG units modeled as RX type of nodes modify the Jacobianmatrix in (8) and consequently state vector (x) in (7) with slip ofasynchronous generator, respectively, as follows
H(RX) =
⎡⎢⎣
· · · ∂g(Pg)/∂Va ∂g(Pg)/∂Vr 0 · · ·· · · ∂g(Q g)/∂Va ∂g(Q g)/∂Vr 0 · · ·· · · ∂P ′
g/∂Va ∂P ′g/∂Vr ∂P ′
g/∂s · · ·
⎤⎥⎦ , (22a)
x(RX) = [ · · · VTa VT
r sT · · · ]T, (22b)
where particular derivatives in (22a) can be derived from the stan-dard power flow equations [16] and model of the asynchronousgenerator given in Appendix A [17].
Above explained derivations supposes that results from weatherforecast are known and available for state estimation [representedby wind speed in Eq. (18)–(20)]. This assumption is not realistic incases of small-scale generation over large areas. Then, the initialestimation can be calculated based on NDGPs. In both cases, theinitial estimations are treated as the pseudo measurements (withhigher uncertainty). This case is similar with classical PQ nodesfor unmonitored loads, where their typical representation is with“negative” real power load and fixed power factor, given in Section2.3.
The DG units modeled as PQ nodes modify the Jacobian matrix in(8) and consequently state vector (x) in (7), respectively, as follows
H(PQ ) =[ · · · ∂Pg/∂Va ∂Pg/∂Vr · · ·
· · · ∂Q g/∂Va ∂Q g/∂Vr · · ·
]. (23)
The particular derivatives in (23) can be derived from the stan-dard power flow equations [16].
3.2. PQ nodes for DG units based on photovoltaic power plant
Supposing that these DG units are linked directly to the distri-bution network, output real and reactive power can be calculated(initially estimated), respectively, by applying [20]
Pg = Ppv = pv� cos �Apv [KW], (24)
Og = 0 [kVAr], (25)
where initial estimation of solar radiation (�) in (24) was obtainedfrom weather forecast (if available), or from NDGPs (obtained fromanalysis of the historical database).

7 ower Systems Research 84 (2012) 72– 82
iwmt
3
whrmtP
twe
V
enc
H
x
w(
tCoTvit
3
ai
�
s
wtDh
4s
4
ra
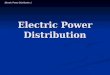
Step 1: Initialization− Initial state variables − Nodes with zero injections − Initial Load Allocation (from NDLPs) and Initial Generation Allocation (from weather forecast or from NDGPs) − Identification of real-time measurements
Step 2: Measurements incrementsCalculate increments of all measurements by (30)
Step 3: Information Matrix and Increment of State Vector
Calculate the Jacobian and the Information matrices, as well as increment of state vector by (31)
Step 5: Update State VectorUpdate state vector by (33)
Step 6: Optimal Load/Generation ReallocationPerform steps in Optimal Load/Generation
Reallocation algorithm
Step 4: Convergenceixmax Δ ≤ ε
Optimal solution
Step 7: Next iteration
Step 2: Measurements incrementsCalculate the increments of
6 A.T. Saric, A. Rankovic / Electric P
The DG units modeled as PQ nodes modify the Jacobian matrixn (8), as defined in (23), and consequently state vector (x) in (7),
here active power injection (24) is treated as a pseudo measure-ent, while the equation for zero reactive power injection (25) is
reated as a virtual measurement.
.3. PV nodes for DG units based on synchronous generator
In this case there is a possibility for voltage regulation in nodeshere DG units are connected. Typical examples are medium-scaleydro power plants with reservoir (usually with several MVAs ofated power), or large-scale power plants based on biomass withicro turbine as a primary motor (directly connected to the dis-
ribution network). Respecting their rated power, in practice theseV nodes are usually completely monitored.
Then, the real power generation (Pgi) and voltage in connec-
ion node (Vi =√
V2ai
+ V2ri
) are constant and specified in advance,hile the reactive power generation (Qgi) and voltage angle (�i) are
lement of vector of state variables (x) in (7), where
ai = Vi sin �i, Vri = Vi cos �i. (26)
For example, if the DG units are modeled as PV nodes andquipped with real-time measurements of real power injection andode voltage, the modifications of the Jacobian matrix in (8) andonsequently state vector (x) in (7), respectively, are as follows
(PV) =[ · · · ∂Pg/∂V · ∂V/∂� ∂Pg/∂Q g · · ·
· · · ∂V/∂� ∂V/∂Q g · · ·
], (27a)
(PV) = [ . . . �T Q Tg · · · ]
T, (27b)
here Pgi = f (Qgi) is determined by the generator’s capability chartfor constant generator’s internal voltage) [21].
In cases where DG units are partially monitored or unmonitored,he detailed model of synchronous generator must be applied [21].onceptually, this case is similar with RX nodes for DG units basedn asynchronous generator, given in Section 3.1 and Appendix A.he difference is that scheduled real power injections and nodeoltages are subject to lower uncertainty, so they have the weightsn the range with real-time measurements. Due to lack of space,his model is omitted from the paper.
.4. Optimal Load/Generation Reallocation
A similar procedure for Optimal Load/Generation Reallocations for Optimal Load Reallocation in Section 2.4 is applied. From (14)s
z′rt = K ′area �Parea = K ′area �(Parea
g − Pareap ), (28)
o the optimization can be formulated similarly as in (16).Calculation of the Initial Generation Allocation on DG units
here data from weather forecast are available is described in Sec-ions 3.1–3.3. In opposite case, the Initial Generation Allocation onG units is estimated from NDGPs (obtained from analysis of theistorical generation database).
. WLS- and Optimal Load/Generation Reallocation-basedtate estimation
.1. Basic algorithm for radial distribution networks
Respecting the above explanation, modified WLS-based algo-ithm (with additional steps of Initial Load/Generation Allocationnd Optimal Load/Generation Reallocation) is applied to minimize
Fig. 2. Flow chart of proposed WLS- and Optimal Load/Generation Reallocation-based State Estimation.
the objective function (classical measurement model) in state esti-mation [16]
minx
{J(x) = [zrt+p+v − h(x)]T R−1rt+p+v[zrt+p+v − h(x)]}, (29)
where Rrt+p+v = diag{ 2z1, 2
z2, . . . , 2zM} (M is a total number of
real-time, pseudo, and virtual measurements).For state estimation, the following steps illustrated on flow-
chart shown in Fig. 2, are applied:Step 1: Initialization
- Set iteration count to (k) = 0.- Initial state variables (depending on load/generation node types)
and determining the initial state vector (x(k)).- Identification of nodes with zero injections that determines the
subvector of virtual measurements (zv). This vector is constantover the optimization.
- Initial Load Allocation by NDLPs (respecting load types, day typesand seasons) and Initial Generation Allocation from weather fore-cast or NDGPs (Sections 3.1–3.3), that determines the subvectorof pseudo measurements (z(k)
p ).- Subvector of real-time measurements (zrt). This vector is constant
over the optimization.
all (real-time, pseudo and virtual) measurements by
�z(k)rt+p+v = z(k)
rt+p+v − hrt+p+v(x(k)). (30)

A.T. Saric, A. Rankovic / Electric Power S
Hv
�
m
S
x
-
-
-
tacsw(
4
nWnsceeis
c
Fig. 3. Part of meshed distribution network with a breakpoint.
Step 3: Information matrix and increment of state vectorCalculate the Jacobian [H(x(k))] and the information [G(x(k)) =
(x(k))TR−1
rt+p+vH(x(k))] matrices, as well as the increment of stateector
x(k) = G(x(k))−1
H(x(k))TR−1
rt+p+v �z(k)rt+p+v. (31)
Step 4: ConvergenceCheck the convergence criterion
ax |�x(k)i
| ≤ ε. (32)
If convergence criterion (32) is satisfied, then x = x(k), and Go toTOP,
Else Continue.Step 5: Update state vectorUpdate state vector as
(k+1) = x(k) + �x(k). (33)
Step 6: Optimal Load/Generation Reallocation
Calculation of increments for a part of the real-time measure-ments that are included in the reallocation algorithm, �z′(k)
rt =z′
rt − hrt(x(k)) in (10b). Optimal Load/Generation Reallocation algorithm (described inSections 2.4 and 3.3).
Calculation of increments for pseudo measurements(�z(k)
p ) and a new vector of all measurements z(k)rt+p+v =[
zTrt (z(k)
p + �z(k)p )
TzT
v
]T
.
Step 7: Next iterationSet (k + 1) → (k) and Go to Step 2.For wind generators modeled as RX node calculation of the addi-
ional increments (�z(k)p ) between powers Pt and P ′
g [see Eq. (17)nd (18) and Fig. A1 in Appendix A] is needed. Initial Pt in (17) wasalculated for initial wind speed (from weather forecast) and sliptate variable for asynchronous generator [19,20], while initial P ′
gas calculated from the model of asynchronous generator by Eq.
A2), given in Appendix A.
.2. Meshed networks
Fig. 3 shows an example of a weakly meshed distributionetwork containing a simple loop. The described algorithm forLS-based state estimation in radial distribution networks can-
ot be applied directly to the meshed network. Nevertheless, byelecting the breakpoint, this network can be converted to a radialonfiguration. The branch currents interrupted by the creation ofvery breakpoint can be replaced by current injections at their twond nodes that satisfy I(1)
ba�= −I(2)
ba�and I(1)
br�= −I(2)
br�, without affect-
ng the network operating condition. These constraints make a newet of equality constraints
(x) = 0. (34)
ystems Research 84 (2012) 72– 82 77
For the radial network resulting from the objective function (29)and equality constraints (34) the Lagrangean function is
= 12
[zrt+p+v − h(x)]T R−1rt+p+v[zrt+p+v − h(x)] − �T c(x), (35)
and then (31) can be modified as[G(x(k)) C(x(k))
T
C(x(k)) 0
] [�x(k)
−�
]=
[H(x(k))
TR−1
rt+p+v �z(k)rt+p+v
−c(x(k))
],
(36)
where C(x(k)) = ∂c(x)/∂x|x=x(k) .
5. Application
The proposed algorithm was tested on two real-life urban andsuburban distribution networks from Electric Power Industry ofSerbia.
Simultaneous and long-term measurements of medium/lowvoltage loads are the most reliable way to achieve their daily loadsprofiles (DLPs). However, the distribution power utilities usuallyhave several to several tens (even hundreds) of thousands of cus-tomers, therefore, it is clear that the measurement of DLPs for allcustomers is practically and economically unjustified. In order toprovide a picture of aggregated loads with sufficient quality, thein-field measurements of a small number of representative loadswere used.
The conforming loads were selected into sub-groups with the“similarity” of their DLPs. Each sub-group is termed as “load type”.The non-conforming loads have DLPs that cannot be correlated withany of the daily load types.
The DLPs are represented as continuous curves derived on thebasis of recorded discrete values of loads (averaged in a range of10–15 min) and minimum least-square approximation. These dataare classified into 4 seasons (winter, spring, summer and autumn)and 4 types of days (weekday, Saturday, Sunday and holiday). Thecharacteristic load types were selected among the following ones:(1) commercial and business, (2) agricultural, (3) small industry,(4) medium industry (large industrial complexes are usually feddirectly from transmission or subtransmission networks), (5) resi-dential – buildings (remotely or electrically heated and/or remotelyfed by hot water), etc. The DLPs are normalized (by NDLPs) asdescribed in Section 2.1.
The important advantage of load (or generation) models basedon NDLPs (or NDGPs) is a radically smaller number of necessarydata. In the case when DLPs are used, all loads must have indi-vidual load profiles. On the contrary, when NDLPs are used, allsimilar loads have “unique load profile”. Thus, for example, for dis-tribution networks with 1000 different loads, for the period of oneyear, 365 × 1000 = 365 000 DLPs are necessary. If all loads can berepresented by 5 characteristic load types, with 4 seasons and 4characteristic day types, only 5 × 4 × 4 = 80 NDLPs are necessary.
Assuming that the region (mean ± 3 ) covers the full area undera Gaussian distribution, the following equation was used to passfrom the accuracy of real-time and pseudo measurements to thestandard deviation [9,12]
= Mean × (Accuracy/300), (37)
where in simulation tests:
- accuracy of load/generation pseudo measurements was fixed tothe range ±(10−20) % (for calculation of p);
- accuracy of real-time measurements was fixed to the range±(1−3) % (for calculation of rt);
- variances of virtual measurements were fixed to the range 2v =
1 × 10−8 − 1 × 10−11.

78 A.T. Saric, A. Rankovic / Electric Power S
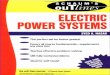
Fig. 4. Locations and types of real-time, pseudo and virtual measurements in 40-node 20 kV test distribution network. Different areas subjected to the particularreal-time measurements (in accordance with the methodology proposed in Section2.4).
5
con
ca
nDa(r
and minimum load conditions are shown in Figs. 6 and 7, respec-tively.
Convergence criterion (ε = 1 × 10−3) of the proposed algorithm
.1. 40-Nodes 20 kV test system
A part of a real-life 20 kV distribution network (with dominantable structure) is considered. The location and status of normallypened switches determine the actual radial configuration of theetwork (Fig. 4), where part of input data is given in [8].
The initial system’s total real load is 3.10 p.u. (maximum loadondition) and 1.62 p.u. (minimum load condition). All p.u. valuesre referenced to the base power (3 MVA).
Two small unmonitored photovoltaic panels are located inodes 24 and 27 and one wind generator in node 34 (see Fig. 4).ue to the lack of space, their detailed technical characteristicsre omitted from the paper. Their initial and re-adjusted valueswind speed, slip of asynchronous generator, solar radiation and
eal power outputs) are shown in Table 1 and Fig. 5.ystems Research 84 (2012) 72– 82
Nodes 1, 2, 3, 14, 21, 29, and 37 are with virtual measurements(zero power injections) − see system topology in Fig. 4 and pre-sented results in Fig. 5.
Areas for Optimal Load/Generation Reallocation algorithm areshown in Fig. 4, where all weighting factors for optimization in(16) are equal to 1 (the same influence of all real-time branch flowmeasurements to the reallocation areas).
Available real-time measurements of node (real/reactive) injec-tions are located in nodes 28 and 32 − see single-line diagram inFig. 4 and presented results in Fig. 5.
Available real-time branch real/reactive power flow measure-ments for maximum (minimum) load condition are (see single-linediagram in Fig. 4 and presented results in Table 1):
P0–1 = 2.50(1.45) p.u., Q0–1 = 0.75(0.45) p.u.,
P0–3 = 0.50(0.25) p.u., Q0–3 = 0.10(0.05) p.u.,
P13–15 = 1.30(0.76) p.u., Q13–15 = 0.44(0.16) p.u.,
Accuracy in (37) (denoted below as ‘Ac‘) or measurement vari-ances ( 2), respectively, were adopted as:
- Real-time measurements: Acrt = 3%.- Pseudo measurements: Acp = 20%.- Virtual measurements: 2
v = 1 × 10−8.
Results obtained by the proposed WLS-based distributionstate estimation with applied Optimal Load/Generation Real-location algorithm are compared with standard WLS-baseddistribution state estimation [16]. The branch real-time mea-sured and estimated values of real and reactive power flowsare shown in Table 2 for both maximum and minimum loadconditions.
Initial and re-adjusted node’s variables (real powerloads/generations) obtained by the proposed algorithm andresults for standard WLS-based distribution state estimation aregiven in Fig. 5 (for both minimum and maximum load conditions).Note that in Fig. 5 three real positive injections suggest that inthese nodes we have the generations (nodes 24, 27 and 34), whilethe negative injections in all other nodes suggest that in thesenodes we have the loads.
Results in Table 2 compare the branch real-time measure-ments with their estimated values for standard WLS- and proposedOptimal Load/Generation Reallocation- and WLS-based distributedstate estimation. In WLS-based state estimation (see Fig. 5) onlywind generator output power is reallocated due to the changesin slip of the asynchronous generator. In proposed OptimalLoad/Generation Reallocation and WLS-based distribution stateestimation, both loads and DG units output powers were real-located. Consequently, the differences between branch real-timemeasurements and their estimated values were decreased (seeTable 2).
Re-adjusted system’s total real load for maximum load con-dition is 2.84 p.u. (a decrease for 8.4 %), while for minimum loadcondition it is 1.81 p.u. (an increase for 11.7 %).
Estimated node voltage magnitudes and angles for maximum
was reached for 6 iterations.

A.T. Saric, A. Rankovic / Electric Power Systems Research 84 (2012) 72– 82 79
Table 1Summary of wind turbine and photovoltaic panels.
Unit Node Load condition Initial value Optimal Load/Generation Reallocationand state estimation
v (m/s) s Pw (p.u.) v (m/s) s Pw (p.u.)
Wind 34Maximum 10.0 −0.010 0.169 9.4 −0.006 0.136Minimum 10.0 −0.010 0.169 9.1 −0.005 0.101
Unit Node Load condition Initial value Optimal Load/Generation Reallocationand state estimation
� (W/m2) Ppv (p.u.) � (W/m2) Ppv (p.u.)
Photovoltaic24
Maximum 920 0.029 1016 0.032Minimum 480 0.015 380 0.012Maximum 856 0.027 412 0.013
5
pm
(
••
Five unmonitored wind generators with the same technical
27 Minimum 412
.2. 322-Nodes 110/35/10/0.4 kV test system
In analyzed test example, one 110 kV subtransmission loop isresent, and the algorithm for meshed networks (from Section 4.2)ust be applied.The total number of available real-time measurement places
with paired real/reactive power measurements) is 17, located on:
2 substations 110 kV/36.75 kV with branch flow measurements;14 substations 35 kV/10.5 kV with branch flow measurements;
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39
-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
Nodes
Nod
e re
al p
ower
inje
ctio
ns [p
.u.]
Initial Load/Generation Allocation Standard WLS-based State Estimation Optimal Load/Generation Reallocation and State Estimation
a. Maximum load condition (from NDLPs)
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39
-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
Nodes
Nod
e re
al p
ower
inje
ctio
ns [p
.u.]
Initial Load/Generation Allocation Standard WLS-based State Estimation Optimal Load/Generation Reallocation and State Estimation
b. Minimum load condition (from NDLPs)
Fig. 5. Results for estimated node real power injections.
0.013 224 0.007
• 1 load node (in industrial complex) with node injection measure-ments.
Initial system’s total real load is 8.80 p.u., where all p.u. valuesare referenced to the base power (3 MVA).
characteristics are available with initial total real power output of0.17 p.u. (calculated for wind speed from weather forecast).
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 390.975
0.98
0.985
0.99
0.995
1
Nodes
Nod
e vo
ltage
mag
nitu
des
[p.u
.]
Maximum load condition Minimum load condition
Fig. 6. Results for estimated node voltage magnitudes.
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39-2
-1.8
-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
Nodes
Nod
e vo
ltage
ang
les
[deg
ree] Maximum load condition
Minimum load condition
Fig. 7. Results for estimated node voltage angles.

80 A.T. Saric, A. Rankovic / Electric Power Systems Research 84 (2012) 72– 82
Table 2Real-time measured and estimated values of branch real and reactive power flows.
Line Power Real-time measurement Optimal Load/Generation Reallocationand state estimation
Standard WLS-based stateestimation
(p.u.) (p.u.) (%) (p.u.) (%)
Maximum load condition
0–1P 2.500 2.448 −2.080 2.731 9.240Q 0.750 0.789 5.200 0.702 −6.403
0–3P 0.500 0.501 0.204 0.452 −9.607Q 0.100 0.107 7.002 0.089 −11.007
13–15P 1.300 1.261 −3.005 1.425 9.615Q 0.440 0.451 2.503 0.479 8.864
Minimum load condition
0–1P 1.450 1.428 −1.517 1.427 −1.586Q 0.450 0.468 4.000 0.424 −5.778
0–3P 0.250 0.250 0.160 0.255 2.000Q 0.050 0.053 6.000 0.056 12.002
13–15P 0.760 0.763 0.395 0.764 0.526Q 0.160 0.163 1.875 0.154 −3.750
Table 3Maximum absolute changes of node/branch measurements and change of node loads/generation sums after Optimal Load/Generation Reallocation and state estimation.
Acrt = 1% 1% 3% 3%Acp = 10% 20% 10% 20%
Maximum absolute change of node/branch measurementNode with virtual measurement (10−8 p.u.) 3.50 1.82 1.61 1.37Node with real-time measurement (%) 1.98 2.05 1.93 1.96Node with pseudo measurement (%) 3.71 5.83 3.75 3.73Branch with real-time measurement (%) 5.25 2.75 7.09 6.13Change of node loads/generation sums
md1
6
e
•
•
•
•
•
da
P ′g = −
∣∣Ir
∣∣Rr1 − s
s= −(V2
a + V2r )(C2 + D2)
(A2 + B2)2Rr
1 − s
s,
Pg = P ′g + PLosses, (A2)
jXs sR
mRjVraV + rR
s
jXr
g wt PPP′ ≈ =
rI
g gQ,P
Node loads (%) −7.54
Node generations (%) −28.96
Sensitivity analysis at the level accuracy of real-time and pseudoeasurements was performed in Table 3 (for maximum load con-
ition). Variance of the virtual measurements is adopted as 2v =
× 10−8.
. Conclusion
The main advantages of the proposed methodology for statestimation in distribution networks are as follows:
Extremely highlighted problems of the lack of input data anddata uncertainty in distribution networks are efficiently solved byusing the pseudo measurements (obtained from NDLPs for loadsand from weather forecast or NDGPs for DG units) and virtualmeasurements (node zero injections).Characteristic types of DG units, depending on technology andavailability of real-time measurements, are represented.NDLPs and NDGPs are not assumed to be exactly true, andtheir initial values are adaptively adjusted (based on both InitialLoad/Generation Allocation and Optimal Load/Generation Real-location procedures and WLS-based state estimation) dependingon the values of real-time measurements.The algorithm does not have conceptual or numerical constraintsin the sense of dimension of the considered distribution network,level of loads and DG units, volume and type of available inputdata.The proposed model is robust, since it can be used for any levelof data and real-time measurements availability and any level ofdistribution automation in utilities.
Proposed methodology is compared with standard WLS-basedistribution state estimation, where obtained results show bettergreements between real-time measured and estimated variables.
−8.08 −8.08 −7.60−32.79 −26.77 −28.03
The developed software is a universal tool for DMS, where distri-bution state estimation is basic real-time power function. Basedon available real-time measurements from SCADA and histor-ical DMS database with characteristic NDLPs and NDGPs, theinfluence of some of input data on the load/generation realloca-tion and distribution state estimation can be respected or totallyrejected by Distribution System Operator, by adjusting the weight-ing factors in WLS-based distribution state estimation and OptimalLoad/Generation Reallocation-based optimization procedures. Thisapproach minimizes the influence of unreliable NDLP- and NDGP-based input data to the final solution.
Appendix A. Modeling of the asynchronous generator [17]
The RX model of the asynchronous generator (Fig. A1) is basedon the steady-state equations for complex rotor current, real powerand reactive power, respectively:
Ir = −V(C + jD)A2 + B2
, (A1)
jXm
Fig. A1. The equivalent circuit of asynchronous generator.

ower S
Q
w
A
B
C
D
A
Ia
abhi�mnN
ppP
r
(tTw(
VAc
ghhHIJKpP
qstvV
t
A.T. Saric, A. Rankovic / Electric P
g = Pg−A(Xm + Xr) + B(Rm + Rr/s)A(Rm + Rr/s) + B(Xm + Xr)
, (A3)
here
= RmRs − XmXs + RrRs + Rm
s− Xr(Xs + Xm),
= XmRs + XsRm + RrXs + Xm
s+ Xr(Rs + Rm),
= RmA + XmB,
= XmA − RmB.
ppendix B. List of symbols
ndices1
, r active and reactive components (rectangular coordinatesof complex variable), respectively
rea area in Optimal Load/Generation Reallocation procedure branch
hydro, j, k running indices for buses
running index for branches, s running indices for measurements
nominal rating, or running index for areas, M total number of buses and measurements (real-time,
pseudo and virtual), respectively, g load and generation, respectivelyv photovoltaic, I, Z constant real power, current and impedance load models,
respectivelyt, p, v real-time, pseudo, and virtual measurements, respec-
tivelyRX), (PV), (PQ) model types for DG units
turbine matrix transposes
windk) iteration count
ariables branches-nodes incidence matrix
parts of constant power, current or impedance load mod-els
(P) measurements-node real powers model(x) measurements-state variables model
water head (m) measurements-state variables Jacobian matrix
currents (injections and branch flows) value of optimization criterion
measurements-node real powers Jacobian matrix relative real loading factor, Q real and reactive powers (injections and branch flows),
respectively flow of watercourse (m3/s)
slip of asynchronous generator
time instant for state estimationwind speed (m/s), � node voltage magnitude and angle, respectively
1 Note that vectors and matrices are denoted in bold letters, while increments ofhe variables are denoted as ‘�’.
[
[
[
ystems Research 84 (2012) 72– 82 81
x, z state and measurement vectors, respectivelycos ϕ power factor� tip speed ratio of wind turbine
ParametersAw rotor area of wind turbine (m2)Apv area of photovoltaic panel (m2)Ac accuracy of real-time and pseudo measurementscp(�) power coefficient of wind turbineCm set of downstream areas that are adjacent with available
m-th real-time measurementg standard (Earth) gravity (≈9.81 m/s2)R diagonal matrix of measurement variancesR radius of rotor blades at wind turbine (m)Rs, Rr, Rm stator, rotor and magnetizing resistances of asyn-
chronous generator, respectivelySTn nominal rating of distribution transformer (kVA)S� set of nodes with current flowing over l-th branchXs, Xr, Xm stator, rotor and magnetizing reactances of asyn-
chronous generator, respectivelyε convergence criterion 2
z measurement variance�a density of air (≈1225 kg/m3)�h density of water (≈ 1000 kg/m3)� angle of incidence of photovoltaic panel efficiencyωR angular speed of wind turbine rotor (rad/s)� solar radiation (W/m2)
AbbreviationsDG distributed generationDMS Distribution Management SystemNDGP normalized daily generation profileNDLP normalized daily load profileWLS weighted least square
References
[1] R. Singh, B.C. Pal, R.A. Jabr, Choice of estimator for distribution systemstate estimation, IET Generation, Transmission & Distribution 3 (2009)666–678.
[2] D. Thukaram, J. Jerome, C. Surapong, A robust three-phase state estimationalgorithm for distribution networks, Electric Power Systems Research 55 (2000)191–200.
[3] M.E. Baran, A.W. Kelley, A branch-current-based state estimation method fordistribution systems, IEEE Transactions on Power Systems 10 (1995) 483–491.
[4] Y. Deng, Y. He, B. Zhang, A branch-estimation-based state estimation methodfor radial distribution systems, IEEE Transactions on Power Delivery 17 (2002)1057–1062.
[5] H. Wang, N.N. Schulz, A revised branch current-based distribution system stateestimation algorithm and meter placement impact, IEEE Transactions on PowerSystems 19 (2004) 207–213.
[6] M.K. Celik, W.H.E. Liu, A practical distribution state calculation algorithm,in: IEEE Power Engineering Society 1999 Winter Meeting, vol. 1, 1999, pp.442–447.
[7] W. Jie, K.N. Miu, Weighted least squares methods for load estimationin distribution networks, IEEE Transactions on Power Systems 18 (2003)1338–1345.
[8] A.T. Saric, R.M. Ciric, Integrated fuzzy state estimation and load flow analy-sis in distribution networks, IEEE Transactions on Power Delivery 18 (2003)571–578.
[9] R. Singh, B.C. Pal, R.A. Jabr, Distribution system state estimation throughGaussian mixture model of the load as pseudo-measurement, IET Generation,Transmission & Distribution 4 (2010) 50–59.
10] M.E. Baran, L.A.A. Freeman, F. Hanson, V. Ayers, Load estimation for load mon-itoring at distribution substations, IEEE Transactions on Power Systems 20(2005) 164–170.
11] V.P.N. Borozan, N.Lj. Rajakovic, Load estimation for distribution systems with
minimum information, European Transactions on Electrical Power 14 (2004)331–345.12] I. Cobelo, A. Shafiu, N. Jenkins, G. Strbac, State estimation of networks withdistributed generation, European Transactions on Electrical Power 17 (2006)21–36.

8 ower S
[
[
[
[
[
[
[
[
[
2 A.T. Saric, A. Rankovic / Electric P
13] U. Singh, M.E. Baran, Load estimation for distribution feeder monitoring andmanagement, in: IEEE Power and Energy Society General Meeting, 2010, pp.1–6.
14] J. Wan, K.N. Miu, A WLS method for load estimation in unbalanced distributionnetworks, in: IEEE Power Engineering Society 2002 Winter Meeting, vol. 2,2002, pp. 969–974.
15] M.B. Do Coutto Filho, A.M. Leite da Silva, D.M. Falcão, Bibliography on powersystem state estimation (1968–1989), IEEE Transactions on Power Systems 5(1990) 950–961.
16] A. Abur, A.G. Exposito, Power System State Estimation: Theory and Implemen-tation, Marcel Dekker, 2004.
17] B. Fox, D. Flynn, L. Bryans, N. Jenkins, Wind Power Integration: Connection andSystem Operational Aspects, IEE, London UK, 2007.
18] A.E. Feijoo, J. Cidras, Modeling of wind farms in the load flow analysis, IEEETransactions on Power Systems 15 (2000) 110–115.
19] A. Harvey, A. Brown, P. Hettiarachi, A. Inversin, Micro-Hydro Design Manual:A Guide to Small-Scale Water Power Schemes, Intermediate Technology Pub-lications, London, UK, 1993.
ystems Research 84 (2012) 72– 82
20] Md. Habibur Rahman, S. Yamashiro, Novel distributed power generating sys-tem of PV-ECaSS using solar energy estimation, IEEE Transactions on EnergyConversion 22 (2007) 358–367.
21] J.J. Grainger, W.D. Stevenson, Power System Analysis, McGraw Hill, New York,USA, 1994.
Andrija T. Saric was born in 1962. He received the B.Sc., M.Sc., and Ph.D. degrees inelectrical engineering from the University of Belgrade, Belgrade, Republic of Serbia,in 1988, 1992, and 1997, respectively. He is a Full Professor of Electrical Engineeringat Technical Faculty Cacak, University of Kragujevac, Republic of Serbia. His mainareas of interest are power system analysis, optimization and planning, as well asapplication of artificial intelligence methods in these areas.
Aleksandar Rankovic was born in 1971. He received the B.Sc. degree from Technical
Faculty Cacak, University of Kragujevac, Republic of Serbia in 1994 and M.Sc., andPh.D. degrees in electrical engineering from the University of Belgrade, Belgrade,Republic of Serbia, in 2002 and 2010, respectively. At present, he is an assistantprofessor at Technical Faculty Cacak, University of Kragujevac. His main areas ofinterest are power system analysis and electromagnetic compatibility.