Embed Size (px)
Citation preview

INSTALLATION INSTRUCTIONS
MOA - A
MOA- A
Electric rotary multi-turn actuators for applications in nuclear power stations outside containment
MODACT MOAType Nos 52 020 - 52 026
MOA A - 10/05


3
1. APPLICATIONThe MODACT MOA rotary electrical actuators of the
multi-revolution type are designed for remote control ofthe special valves in the attended areas of the nuclearpower plants with the VVER or RBMK reactors.
2. OPERATING CONDITIONS The actuators must operate reliably in the environment
characterized as follows:
Operating temperature -20 °C to +55 °CAtmospheric pressure 85 to 100.8 kPaRelative air humidity up to 75 % at +55 °C
3. TECHNICAL SPECIFICATIONMain technical characteristics are listed in the table.
Motor supply voltage 3 x 380 VAC/50 Hzor 3 x 400 VAC/50 Hz
Protection level IP 55
For the resistance against seismic shocks, againstthe action of deactivating agents, and other parameterssee the Technical Conditions No. TP 422-99-008/87a.
4. OPERATING POSITIONThe MODACT MOA actuators can operate in any
position provided that the motor is not under theactuator, i.e. the motor axis is not more than 15° belowthe horizontal plane.
Noise: Maximum acoustic pressure level A is 85 dB(A)Maximum acoustic power level A is 95 dB(A)
5. DESCRIPTIONThe MOA actuators are designed to be mounted
directly on a valve with the attachment via a flange per ISO5210 and a C/E-shaped coupling in accordance with DIN3210. Arrangement of a part of the actuator is shown inFig. 1. Using a counter-gear 2 the three-phaseasynchronous motor 1 drives the central wheel of thedifferential gear installed in the actuator support box(power gear) 3. During the motorized operation the planetdifferential crown gear is held in its invariable position by a self-locking worm gearing. Hand wheel 4, attached to the worm, makes it possible to operate the actuatormanually while the motor is running. The hollow outputshaft is fixed to the planet gear driver. The output shaftreaches to the control box 5 where all the actuator controlsare gathered – positional, signalling, and torque switches,resistance or current transducer, and heating resistor.Operation of positional and signalling switches is derivedfrom motion of the output shaft via relevant mechanisms.
The torque switches are activated from axial shif of themanual control "floating worm" whose position is sensedand brought over to the control box via a small lever. The inside controls are accessible once the lid 6 of the box isremoved. The terminal board box 7 is also hidden under thelid 8. The cable inlets are secured using the cable bushings(9). The motor has a separate terminal board 10 and a cablebushing. If the actuator is fitted with a resistance transducerthe position of the outlet shaft can be read on the positionindicator 11. The actuator in the version with the currenttransducer is not fitted with a position indicator.
The individual actuator functions, such asdeactivation at a particular torque or position value,signalling, remote indication of the position (resistanceor current transducer), are provided by the mechanicalassemblies (units). They are available on the controlpanel (fig. 2) housed in the control box.
Differing in their functions, there are the followingcontrol units:
a) Torque-operated tripping unit 12b) Signalling unit 13c) Pre-setting mechanism of resistance transducer 14d) Resistance transducer with a mechanical
positional indicator 15e) Positional unit 16f) Heating resistor 17
The above units are universal, applicable to the MOAactuators of all sizes.
Important ConventionThe micro-switches used in the individual units do not
make it possible to apply two voltages differing in theirvalue and phase to the contacts of the same switch.These micro-switches can only be used as the switches,circuit breakers, or selector switches for a single circuit.
Interpretation key:1) Three-phase
asynchronous motor2) Counter-gear3) Power gear4) Manual control wheel5) Control box6) Control box lid
7) Terminal board box8) Lid of the terminal board
box9) Cable bushings
10) Motor terminal board11) Position indicator12) Cable bushing (for motor)
11 5
10
12
1 2 3 4
6 7 8
9
Fig. 1 – Actuator assembly

4
Description and Functionality of the Control Unitsa) Torque-operated tripping unit (fig. 3) is a separateassembly composed of the main board 19 holding the micro-switches 20, forming at the same time thebearings for the torque-operation shaft 22 and lockingshaft 29. The torque-operation shaft transfers the motionof the floating worm from the power gear using the segments 23 or 24, levers 45 or 46 to the micro-switches MZ or MO. The tripping torque value can be setby moving round the segments opposite the trippinglevers. For off-factory adjustment of the tripping torquethe segments 23 are provided with a scale. On each ofthese scales there are marks for the minimum andmaximum torque values, which can be set individuallyfor each actuator. The torque setting is then directlyindicated by the notches in the segments.
The division on this scale is only to break down the bandbetween the minimum and maximum torque limits moreprecisely and to enable a more precise setting of the trippingtorque value out of the manufacturer’s factory if no loading
stand is available. The segment 23 is for the "closing"direction, the segment 24 for the "opening" direction.
The torque-operated unit is also fitted with a lockingmechanism which will lock the torque-operated switchin its off position and not allow its contacts to closeagain deliberately, preventing thus the motor pulsing.Moreover, the locking mechanism will prevent the torqueswitch from tripping after reversing of the motor andallow thus full utilization of the motor start-up torque.The locking mechanism operates in both directions ofthe actuator output shaft motion in the end positions andin the intermediate position during 1 – 2 revolutions ofthe output shaft after its has reversed.
With a load in the form of a counter-moment attachedto the actuator output shaft the torque-operated shaft 22and thus also the segments 23 and 24 will move a bitround and hence the motion is transferred to the trippinglever 45 or 46. Should the torque on the actuator outputshaft reach the value to which the torque tripping unit isset, the tripping lever will depress the push-button of therespective micro-switch. In this way the motor is turnedoff and the actuator will stop.
Interpretation key:
12) Torque-operated tripping unit13) Signalling unit14) Transducer shifting mechanism15) Resistance transducer with a mechanical position indicator16) Positional unit17) Heating resistor18) Current transducer CPT 1AA19) Driving wheel65) Shim plates66) Fixing screws67) Main control panel
The encircled numbers follow the terminal numbering on theterminal board.
Fig. 2 – Control panel

5
Torque unit setting procedure
The purpose is to set other value of the trippingtorque than the one to which the unit has been set inthe factory. At first the safety nut 44 has to be loosened(see Fig. 3), then the respective safety screw 25 (for the"closing" direction), or 26 (for the "opening" direction).Then, you have to put a screwdriver into the slot in theupper segment 23, or 24, and turn the segment untilthe slot in the segment 27, or 28, points to a givenposition on the scale. To define this position, take thedifference between maximum and minimum torqueswhich can be set in Nm and divide it by the number ofdivisions between these two marks. The resultingtripping torque value in Nm correspondents to onedivision of the scale. Interpolation will give the point onthe scale to which the notch in the segment 27 or 28should point. The color mark on the scale which isnearer to the number 10 identifies the setting of themaximum tripping torque; the other mark identifies thesetting of the minimum torque. The torque-operatedunit may never be set to the position where the notch inthe lower segment is beyond the band delimited withthe color marks on the scale.
With the tripping torque set you have to retighten thesafety screw 25 or 26 and the safety nut 44.
b) Signalling unit (fig. 4) transmits electrical signalcorresponding to the current position of the actuatoroutput shaft.
The unit is driven by gear 38 from the output shaft viaa multi-level gearbox and to the cams 30, 31 whichoperate the micro-switches 36 (opening) and 37(closing). The torque value at which the signallingswitches close their contacts can be selected at anypoint of the actuator working stroke, except for a narrow
band at the end positions (the signalling switch mustclose its contacts ahead of the positional switch whilethe output shaft is still in motion).
The upper cam 37 is for the "closing" direction andthe lower 36 for the "opening" direction.
The signalling unit in the fig. 4 has been designed asa separate assembly, mounted on the holder 39, underwhich the gears are installed in the configuration inaccordance with the kinematic diagram (fig. 5). Thegear is put together so that the shifting wheel K3 canbe shifted over to various levels (I – V) with the safetyscrew 47 loosened. By moving the wheel K3 you willchange the range of setting of the signalling switchesand the transducer according to the actuator workingstroke. Next to the fig. 5 there is a table with the rangesof settings for the individual positions of the shiftingwheel K3.
Setting of the signalling unit
If it is necessary to change the range of the signallingswitches and transducer setting, the position of theshifting wheel K3 has to be changed. In order toreposition the wheel K3, you have to pull the signallingunit a short way out of the control box (the connectionlines to the micro-switches are long enough to make itpossible). This can be done after removing the fourscrews 66 (fig. 2) which hold the unit on the main board.Once the signalling unit is set to the required range, theunit has to be returned back. The wheels K1 and K2 (fig.5) have to be checked for proper engagement prior toretightening the screws 66. On the lower end of the camshaft 48 there is the pinion 49 coupled with the shaft 48via an adjustable friction clutch. Motion for driving theresistance transducer is picked up from this pinion. Forarrangement of the cams and micro-switches of the
Legend:
19) Main board20) MZ, MO micro-switches21) Shifter22) Torque operation shaft23) Upper segment "closes"24) Upper segment "opens"25) Safety screw "closes"
26) Safety screw "opens"27) Lower segment "closes"28) Lower segment "opens"29) Locking shaft44) Safety nut45) Tripping lever "opens"46) Tripping lever "closes"
View P4 View P3
Micro-switchesschematic diagram
Fig. 3 – Torque-operated unit
The encircled numbers follow the terminal numbering on the terminal board.The micro-switches used do not make it possible to apply two voltages differing in value or phase to the contacts of the same switch.

6
signalling unit see fig. 4. The protrusions of the cams 30or 31 deflect the levers 34 or 35 that operate the SO 36and SZ 37 micro-switches. On every setting of thesignalling and positional switches and positional sensorthe actuator output shaft must always be set to theposition for operation of the micro-switches or where a required position is reached.
For setting the signalling switches you have first toloosen the screws 32 (closing direction), or 33 (openingdirection) – fig. 4. Then turn the cam 30 or 31 arrow-wiseuntil the micro-switch operates. Hold the cams in thisposition and retighten the safety screws.
N o t i f i c a t i o nAfter every handling of the safety screws in the
actuator control section, these have to be fixed againstvibration loosening with a drop of a quick-drying varnish.Had the screws been secured with the varnish earlier,the remnants of this varnish have to be removed uponadjustment and the surface under them degreasedproperly.
Interpretation key:
K2 – driving wheelK3 – shifting wheel47 – shifting wheel safety screw48 – cam shaft49 – pinion with friction clutch
Note:
In the figure, the position of the shifting wheel for the actuatorstype no. 52 020 and individual gear levels is shown on the left,for other type nos. on the right.
K1
K247
49
48
K3
Output
shaft
Gear
box
Cams
Fig. 5 – Kinematic diagram of the gears
Working stroke setting table for the signalling unit gearbox
I 2 - 2.5 2 - 6.5 2 - 5 2 - 2.2
II 2.5 - 10.5 6.5 - 22 5 - 17 2.2 - 7.5
III 10.5 - 35 22 - 72 17 - 55 7.5 - 24
IV 35 - 111 72 -220 55 - 190 24 - 82
V 111 - 250 220 - 250 190 - 240 82 - 100
Type number
52 02052 02152 022
52 02452 025
52 026
Gear level
32
36 37 38 3934333130
35
P1P2 Interpretation key:
30) Cams for the "closing" direction
31) Cams for the "opening" direction
32) Screws for the "closing" direction cams
33) Screws for the "opening" direction cams
34) Lever for the "opening" direction
35) Lever for the "closing" direction
36) Micro-switch for the "opening" direction (lower)
37) Micro-switch for the "closing" direction (upper)
38) Gear (driving)
39) Unit holder
3 4
21
View P1 View P2
Micro-switchesschematic diagram
The encircled numbers follow the terminal numbering on theterminal board. The micro-switches can only be used within a single circuit. It is impossible to apply two voltages differingin value or phase to the contacts of the same micro-switch.
Fig. 4 – Signalling unit

7
SQC1(PO)
SQT1(PZ)
14-1516-17
18-1920-21
22-2324-25
26-2728-29
SQC2(SO)
SQT2(SZ)
Open valve
Closed valve
Terminalnumbers
on the board
Contact closed
Contact open
Interpretation key:
51) Toothed gate52) Spring53) Bar with pins54) Shifting pin
55) Toothed gate64) Screw65) Shifting lever
Fig. 6 – Operating diagram of the positional andsignalling switches
53
55
54
52
64
65
51
c) Shifting mechanism of resistance transducer (fig. 7)This mechanism consists of two toothed gates 51, 55
with the spring 52 hung in them. The bar with the pins 53provides for linear movement of both gates. Thisassembly can be turned around the pin 54.The entiremechanism is mounted on the main control board 67 (fig.2). The toothed gates are engaged with the transducerpinion 43 (fig. 7) and pinion 49 (fig. 5). Position of the pin54 then determines the ratio of the shifting mechanism
gear, i.e. that the angle of the transducer and of the localpositional indicator is always 160 ° for various values of theactuator working stroke and thus also for various values ofthe cam shaft angular position in the signalling unit.Because of this,the nominal value of the transducer signalof 100 Ω is always available for any working stroke.
d) Resistance transducer incl. the position indicator (fig. 8).In the core of this unit there is a resistance transducer
42 with its nominal value of the resistance signal equal to100 Ω (minimum of 93 Ω). The shaft is protruding fromthe transducer at its both sides. On the lower shaft endthere is the pinion 43 which can slide on the shaft at bothend positions of the transducer. This is advantageous foradjustment of the unit. The position indicator 40 ismounted on the upper end of the transducer shaft. Theindicator is fixed on the transducer shaft with the screw41.This makes it possible to set the position indicatorrelative to the view port in the control box lid.
Setting of the resistance transducer and position indicator
To set the position indicator proceed as follows: Withthe output shaft in the "closed" position slide out the gate51 (fig. 8) by pressing it towards the transducer,disengaging it from the pinion 49 (fig. 5). Then, turn thegate clockwise to the stop which forms a column underthe signalling unit. Then, re-engage the gate with thepinion 49. The transducer pointer should point to 0°. If itdoes not, move the gate 51 back before its stop anddepress the gate 55. This will release the transducerpinion and the transducer pointer can be set near themark 0° on the transducer scale so that their teethengage properly with each other, once the gate 55 getsengaged with the pinion. We can make sure about that bycareful turning the transducer shaft. Then, we can againslide out the gate 51 from engagement, pushing it morevigorously towards the stop (with the transducer pointermoved to the mark 0° the pinion will slide through). Then,re-engage the gate 51 with the pinion 49. In this position,the oval openings in the toothed gates go parallel withthe oval opening in the main control board 67 (fig. 2).Now the transducer is adjusted for the "closed" position.Then, loosen the screw 64 (fig. 8), position the shiftinglever 65 towards the transducer to the stop point and re-tighten the screw 64.
Re-set the actuator to the "Open" position; thetransducer pointer is re-set to a position between 0° and160°. Loosen screw 64 and rotate the re-setting lever 65counter-clockwise until the transducer pointer is at themark 160°. Then, re-tighten screw 64 and secure itagainst loosening by a drop of quick-drying varnish.Now, the transducer is also set to the position "Open".
The position indicator is mounted on the resistancetransducer axis 42 (fig. 8) with the screw 41. This screwwill be loosened in its "open" position, and the indicatoris turned, so that the mark 100 on the indicator scale 40would coincide with the color dot on the view port in thecontrol box lid. Then re-tighten the screw 41and secure itwith a drop of a quick-draying varnish.
Fig. 7 – Resistance positional transducershifting mechanism

8
Warning!Do not connect the transducer CPT 1/A without
having checked the supply voltage. In the actuator thetransducer outlets must not be connected to theactuator frame nor can they be earthed, not evenincidentally.
1) Before checking the supply voltage, it is firstnecessary to disconnect the transducer from thesupply mains. Voltage on the actuator terminals towhich the transducer is connected is measured – bestby a digital voltmeter with input resistance at least 1MΩ. The voltage should fall within the range 18 – 25 V;in no case may it exceed 30 V (the transducer wouldbe destroyed). Then, connect the transducer so thatthe source positive pole is connected to the positivepole of the transducer, i.e. to the red/black conductor(+) – it is connected to the terminal 51 or the tip 41 forthe version with a connector. The negative pole of thetransducer (black conductor) is connected to theterminal 52 or the tip 42 for the version with aconnector.
Current position transducer CPT 1/A – adjustment
First, a suitable gear ratio from the actuator outputshaft to the transducer shaft is to be set according torequired working stroke of the actuator – see the tableon this page. Setting is accomplished by means of theshifting wheel K3 in the gearbox of the signalling unitaccording to b) on page 6 of the Assembly Instructions.
Then, it is necessary to engage required wheel of thedouble-wheel fastened to the transducer shaft. The wheelsof smaller and larger diameters are marked A and B,respectively.
Re-setting is realized by shifting the oval shims with twoholes under the transducer beam (wheel A is engaged) orabove the transducer beam (wheel B is engaged). This iscarried out in a position when the transducer beam is at itsextreme distance from the gearbox.
Then, re-tighten slightly the screws fixing thetransducer beam so that the transducer beam can beshifted to the position where the wheel A/B is engagedwith the driving wheel. In this position check the wheelengagement and, if necessary, adjust the double-wheelheight against the driving wheel by means of shims onthe transducer shaft. A small gap should be left betweenthe wheel A/B and the driving wheel so that thetransducer shaft is not under stress in the directionperpendicular to its axis. Then, tighten properly the fixingscrews of the transducer beam and secure with varnish.
The gear level of the wheel K3 and wheels A/B ischosen according to the table below. When the requiredworking stroke overlaps two zones it is better to choosethe lower one.
After setting suitable gear level, adjust the currenttransducer as follows:
Description:
40) Position indicator41) Indicator screw42) Resistance transducer43) Transducer’s pinion
Fig. 8 – Resistance transducer with the position indicator
40
41
42
43
Table for setting the working stroke of currentposition transducer CPT 1/A
Gear level Wheel ontransducer
Type number
52 030 52 031 - 032 52 033 - 035
Fig. 9 - Wheel on transducer - gears(version with current position transducer)
Description:68) Current transducer CPT1/A69) Transducer beam70) Securing screw
71) Shim plate72) Oval shims73) Double-wheel74) Limiting shims
68 69 70 71
K3
A
B
74 73 72

9
The encircled numbers follow the terminal numbering on theterminal board.
The micro-switches can be used within a single circuit only.It is not possible to apply to the contacts of the same micro-switch two voltages differing in their value and phase.
Fig. 9 – Positional unit
55 56
63
20 17
14
16
15
19
21
18
62 61
57 58 59 60
Description:
55) Decimal conversion56) Adjustment screw "Z"57) Tripping cam "Z"58) Tripping rod59) Adjustment screw "O"60) Tripping cam "O"61) PO switch62) Driving wheel63) PZ switch
3 4
21
Micro-switchesschematic diagram
2) Connect temporarily a mA-meter, digital ofaccuracy at least 0.5 %, in series with the transducer.Shift the output shaft to the position "closed". The signalvalue should decrease. If this is not the case, rotate theoutput shaft in the direction "closing" until the signalstarts decreasing and the output shaft reaches theposition "closed".
Then, loosen the screws of the transducer shimplates so that the whole transducer can be rotated. Byrotating the whole transducer, set the current to 4 mAand re-tighten the screws of the shim plates. Then,shift the actuator output shaft to the position "open".Set the current to 20 mA by means of a resistancetrimmer at the transducer face (closer to edge). Thetrimmer has 12 revolutions with no stops, hence itcannot be damaged.
In case the correction of 20 mA was considerablerepeat the adjustment to 4 mA and 20 mA once again.Then, disconnect the connected mA-meter. The screwsecured with varnish located closer to the centre mustnot be turned. Tighten properly the screws fixing thetransducer shim plates and secure with varnish againstloosening.
After completing the adjustment, check voltage onthe transducer terminals with a voltmeter. It should fallwithin the range 9 – 16 V for the current 20 mA.
Note:The transducer characteristics has two branches –
descending with respect to the "Z" position or ascendingwith respect to the "Z" position. The characteristics canbe chosen by rotating the transducer body.
e) Positional unit (fig. 9)This unit turns off the PZ/PO switches once the output
shaft reaches the set number of revolutions. The rotarymotion of the unit is taken from the motion of the outputshaft via the driving wheel 62.
In the step mode, this wheel is turning with thearranged gear wheels which operate the cam 57 (60). A round move of the cam for the spring of the PZ and POswitches will result in changeover of the switches.
Handling and SettingThe unit can be set within the range from 2 to 250
revolutions (1 – 100 revolutions in the case of type No. 52 026).For adjustment proceed as follows:a) Having fixed the actuator onto a valve set the latter to
the closed position, using the actuatorb) With the valve in this position, press straight down on
the tripping rod 58, then move it round by 90° in anydirection.
c) Turn the adjustment screw 56 (following the arrow Z)until the position is reached in which the cam 57presses the PZ 63 micro-switch spring.
d) Move the tripping rod 58 by 90° round. The rod willagain slide out. If it does not, move the screw 56 or 59a slight way round.
e) Using the actuator, shift the valve by the requirednumber of revolutions to the "open" position.
f) Press again the tripping rod 58 straight down andmove it by 90° to any side.
g) Turn the adjustment screw 59 (following the arrow O)until the position is reached in which the cam 60presses the PO 61 micro-switch spring.
h) Move the tripping rod 58 by 90° round. The rod willagain slide out. If it does not, move the screw 56 or 59a slight way round.
Note: You have to stop turning the adjustment screws 56,
59 at the moment of changeover!
If the cams are positioned as in fig. 9 or the cam hasalready depressed the micro-switch button the followingprocedure of adjustment is preferred:
Having depressed and moved round the trippingrod 58, turn the adjustment screws 56/59 againstarrows until the cam tip slides down from the micro-switch lever (towards the respective adjustmentscrew) and the micro-switch changes over (you canmake sure about that using a suitable tester). Then,moving the adjustment screw 56/59 a short way back,put the cam tip back to the micro-switch lever. Themicro-switch must again change over (its push-buttonis depressed). Now the micro-switch is adjusted.Then, slide out the tripping rod 58 in the waydescribed above.

10
6. PACKAGING AND STORAGEThe actuators are packaged together with the
valve on which they are to be mounted. Thepackaging method applicable to this assembly mustbe included in the technical conditions for the valveswith the actuator mounted. During the transportationfrom the manufacturer’s factory to the domesticvalve manufacturer where the product is to becompleted with the valve, the product must becovered. In such a case, the actuators aretransported unpackaged.
Having received the actuators from the manufacturer,you have to check them for any transportation damages.Match the label data against those in the dispatchingdocumentation and your order. Any discrepancies,faults, and damages must forthwith be reported to thesupplier.
Where an unpackaged actuator is not to beinstalled at once, it has to be stored in the dust-freeroom at the temperatures from -50 °C to +50 °C andrelative humidity up to 75 %, free of all causticgases and vapors, protected from any detrimentalweather conditions. Before the actuator is put intooperation after a storage period lasting for morethan 3 years it is necessary to replace the oil. Any handling of the actuators is forbidden attemperatures under –25 °C. It is inadmissible tostore the actuators under the open sky or in theareas exposed to rains, snow, or frost. Remove theexcessive grease from the product just before itssetting in operation. Where an unpackaged actuatoris to be stored for over three months, a bag withSilicagel or other drying agent should be placed inthe terminal board box.
The actuators must be stored in the environmentcharacterized by the 1K3, 1Z1, 1B2, 1C1L, 1S1, 1M1classes of the climatic and other conditions per ČSN EN60721-3-1.
At least once in a half-year during the storageperiod it has to be checked that the storageconditions are really observed, that no waterinfiltrates into the storeroom, for example. When theactuators are stored in their original intact packagesthe conservation has to be repeated in three-yearintervals in compliance with the Annex no. 7 to theseTechnical Conditions. Within this re-conservation, thebag with the drying agent must be dried up and putback into the package which has to be tightly closedor sealed with a tape. Where the actuator is stored forover one year, the oil has to be replaced in the powerbox before the product is put into service. Where theactuator is stored for over 4 years, all the rubbergaskets have to be replaced before the product is putinto service.
After the end of storage and before mounting theelectric actuator to a valve, remove the preserving agentfrom a connecting flange using a cloth soaked in suitablesolvent.
7. VERIFICATION OF THE INSTRUMENTFUNCTIONALITYAND ITS LOCATION
Before starting the installation, reexamine theactuator to make sure that it has not suffered anydamage during the storage.
In order to test the motor for operation, connect it tothe power supply via a switch and turn it shortly on. It isenough to check that the motor has started up, that theoutput shaft changed its angular position. The rotaryactuators can operate in any position except the one inwhich the motor axis is more than 15° under thehorizontal plane. The actuator must be positioned toprovide an easy access to the manual control wheel,terminal board box, and control box. You have also torecheck the location for its compliance with theparagraph "Operating Conditions". Where otherinstallation is necessary because of the local condition,an agreement should be reached with the manufacturer.
8. INSTALLATIONFit the actuator onto the valve, so that the output
shaft engages reliably with the valve coupling. Attachthe valve to the actuator, using four (eight) screws. Byturning the hand wheel, check the right couplingbetween the actuator and the valve. Remove the lidfrom the terminal board box and connect the actuatorelectrically in accordance with the wiring diagram ofthe internal and external circuitry.
9. ACTUATOR ADJUSTMENTWith the actuator seated on the valve and the
mechanical coupling verified, start the setting andadjustment procedure.
1) Shift the actuator to an intermediate position,2) Connect the actuator to the power supply and turn it
on shortly to verify the right direction of the outputshaft motion. When viewed in the control box andduring the closing action the output shaft must rotateclockwise,
3) Shift the actuator electrically to the proximity of the"closed" position, and do the fine setting with thehand wheel. In this "closed" position set the positionalunit (PZ micro-switch) as under 5e and the resistancetransducer as under 5d,
4) Set the output shaft to the position where the SZsignalling switch is to change over. Adjust the SZswitch as under 5b,
5) Move the output shaft by the number of revolutions asrequired and set the switch to the PO "open" positionas under 5e and the resistance transducer as under

11
5d. Recheck several times the setting of the positionaland resistance switches.
6) Move the output shaft to the position where the SOsignalling switch is to change over. Do the adjustmentof the SO switch as under 5b.
N o t i f i c a t i o n
When removing the lid from the control box, slide italong the prolonged axis of the actuator output shaft, sothat the position indicator suffers no damage. Whilemounting a valve onto the piping use the actuator handwheel to set the valve to its middle position. Turn themotor shortly on to check that the motor rotates in rightdirection. If not, swap over the two phase wires on themotor terminal board.
10. OPERATIONAND MAINTENANCE
Operation of the rotary actuators comes out of theoperational conditions, being mostly confined todeliverance of pulses for the individual functional tasks. Incase of a blackout, the actuator can be shifted with its handwheel. With the actuator in its automatic mode (not theregulated one) the circuit is recommended to contain themanual remote control devices, so that the actuator couldbe operated in the case of an automatic system failure.
The operators shall make sure that the prescribedmaintenance is carried out, that the actuator is protectedfrom the detrimental environmental and climatic effectswhich are not listed in the paragraph "OperatingConditions".
MaintenanceThe filling is stable while the oil does not leak from the
gearbox due to a defective gasket. The replacementshould be carried out after 500 operating hours of theactuator, but not longer than after 2 years. Check the oillevel once in three months. The level must reach up to thefilling hole. Refill the actuator with the gearbox oil PP80.
Oil filling
Once in two years the teeth of the transmission box gears and their bearings, as well as the leverageof the resistance transducer must slightly be greased.
For lubrication purposes use the CIATIM 201 grease.In order to increase the anticorrosive effects spread thegrease over all the springs and blades in the controlsection.
Fill the actuator adapter (type Nr. 52 026) with theLV2-3 grease – 3 kg.
11. TROUBLESHOOTING1) The actuator in its end position, does not start up,
motor humming – check for a missing phase.If the gate valve is wedged and cannot be torn offmanually or with motor: de-install the actuator andrelease the obstruction.
2) After the actuator has started from the endposition of the output shaft, it stopsspontaneously. It is necessary to ensure that theslot in the change-over wheel (fig. 2) stops in theend position of the actuator output shaft (aftertripping of the torque-limit switch) before it runs onthe shifter 21. This is achieved by proper movinground the actuator output shaft during couplingthe actuator with the valve or by proper movinground the change-over wheel with respect to theoutput shaft. For this, the change-over wheel isfitted with two grooves for a connecting spring. Inaddition, the change-over wheel can beoverturned.
Actuator type code Oil amount in l
52 030 1.3
52 031, 52 032 2.8
52 033, 52 034 6
52 035 12
52 036 12 + grease (see below)

MOA 40-25 2x22S 25 1:56 100 35
MOA 40-40 2x32S 40 1:34 70 37
MOA 63-25 2x72S 25 1:56 100 35
MOA 63-40 2x82S 40 1:34 134 57 37
MOA 160-40 2x12S 40 1:34 180 65
MOA 160-63 52 021 2x22S 63 1:23
120
68
MOA 125-100 2x32S 100 1:14 120 120 68
MOA 250-40 2x12S 40 1:34
190
68
MOA 220-63 52 022 2x22S 63 1:23 190 200 68
MOA 250-80 2x32S 80 1:34 150 68
MOA 400-40 2x12S 40 1:23
280
129
MOA 400-63 2x22S 63 1:23 280 127
MOA400-100 2x42S 100 1:14 340 385 131
MOA 250-100 52 024 2x32S 100 1:14 170 127
MOA 630-40 2x52S 40 1:23
350 590
127
MOA 630-63 2x62S 63 1:23 350 590 129
MOA 1150-45 2x02S 45 1:23 1030 210
F25 MOA 1220-63 52 025 2x22S 63 1:23 1:27 400 1080 212
MOA 800-63 2x32S 630-800 63 1:23 212
F30MOA 2000-32
52 0262x02S
1÷10032 1:45
1:67 400 318
MOA 1850-42 2x12S 42 1:35
Table 1a – Basic technical parameters and characteristics of the MOA actuator for closinga valve placed in attended areas of a nuclear power plant with the VVER/RBMKreactors and SIEMENS motors
Actu
ator
siz
e
A C T U A T O R
Type designation
Type code
Basic Additional
Torquetripping set
range
[Nm]
Scope ofoutput
revolutions setting
[revs]
Outputshaft
shiftingrate
[1/min]
Gear ratio from
outputshaft tomotor
Gearratio from
outputshaft to
handwheel
Max.force on
handwheel
N 1)
Minguaranteedclosing M at
U = 80 %U nom[Nm] 3
Actuatorweight
includingelectricmeter [kg]
20÷40
52 020
40÷63
63÷160
63÷125
160÷250
160÷220
160÷250
250÷400
160÷250
400÷630
630÷1150
630÷1220 2-240
1250÷2000
1000÷1850
F10
F14
F16
X – to be completed by the customer: 0…connection dimension, shape C with resistance transducer1…connection dimension, shape E with resistance transducer4…connection dimension, shape C with current transducer CPT 1AA5…connection dimension, shape E with current transducer CPT 1AA
2÷250
2÷240
1:27
1:31
12

Notes: 1) Only one force of the pair in action on the wheel diameter is listed in the table2) Cable attachment method: packed bushing outlet3) The value recommended by the manufacturer to be set as a maximum, in order to get the startup torque 1.3 times higher than
the closing one at the voltage reduced by 20 %.4) The design versions 52 02x.xxxxS1 and 52 02x.xxxxSM can be ordered.
E L E C T R I C M O T O R
Type designation
Power
[kW]
Motorspeed
[1/min]
Nominal current
[A]
400 V 380 V
Startup current
[A]
400 V 380 V
Efficiency[%]
Powerfactor
[cos ϕ]
Start up-to-nominalmoment
ratio
Start up-to-nominalcurrent ratio
Start uptorque
[Nm]
Motorweight
[kg]
1LA 7070-4AB 0.25 1350 0.76 0.8 2.28 2.4 60 0.79 1.9 3.0 3.42 4.8
1LA 7073-4AB 0.37 1370 1.03 1.07 3.4 3.5 65 0.8 1.9 3.3 4.75 6.0
1LA 7070-4AB 0.25 1350 0.76 0.8 2.28 2.4 60 0.79 1.9 3.0 3.42 4.8
1LA 7073-4AB 0.37 1370 1.03 1.07 3.4 3.5 65 0.8 1.9 3.3 4.75 6.0
1LA 7090-4AA 1.1 1410 2.65 2.7 11.4 11.6 73 0.83 2.0 4.3 14.8 12.3
1LA 7096-4AA 1.5 1420 3.45 3.5 17.3 17.5 77 0.82 2.4 5.0 24 15.6
1LA 7096-4AA 1.5 1420 3.45 3.5 17.3 17.5 77 0.82 2.4 5.0 24 15.6
1LA 7096-4AA 1.5 1420 3.45 3.5 17.3 17.5 77 0.82 2.4 5.0 24 15.6
1LA 7096-4AA 1.5 1420 3.45 3.5 17.3 17.5 77 0.82 2.4 5.0 24 15.6
1LA 7096-2AA 2.2 2880 4.6 4.7 29.0 29.6 81 0.85 2.8 6.3 20.4 15.7
1LA 7113-6AA 2.2 940 5.2 5.4 23.9 24.8 78 0.78 2.2 4.6 48.4 27
1LA 7107-4AA 3.0 1420 6.5 6.8 40.3 42.2 81.5 0.83 2.7 6.2 54 26
1LA 7113-4AA 4.0 1440 8.3 8.6 54.0 55.9 84 0.83 2.7 6.5 73 31
1LA 7107-4AA 3.0 1420 5.2 6.8 40.9 42.2 81.5 0.83 2.7 6.2 54.0 26
1LA 7113-6AA 2.2 940 5.2 5.4 23.9 24.8 78 0.78 2.2 4.6 48.4 27
1LA 7113-4AA 4.0 1440 8.3 8.6 53.9 55.9 84 0.83 2.7 6.5 72.9 31
1LA 7134-6AA 5.5 950 12.8 13 64 65 83 0.76 2.3 5.0 126.5 54.0
1LA 7133-4AA 7.5 1455 15.1 15.2 101 101.8 87.5 0.82 2.7 6.3 132 56.0
1LA 7133-4AA 7.5 1455 15.1 15.2 101 101.8 87.5 0.82 2.7 6.3 132 56.0
1LA 7133-4AA 7.5 1455 15.1 15.2 101 101.8 87.5 0.82 2.7 6.3 132 56.0
1LA 7133-4AA 7.5 1455 15.1 15.2 101 101.8 87.5 0.82 2.7 6.3 132 56.0
13

14
Dim
ensi
ona
l ske
tch
of
the
MO
DA
CT
MO
Ael
ectr
ic a
ctua
tors
, Ty
pe
No
. 52
026
Dim
ensi
ona
l ske
tch
of
the
MO
DA
CT
MO
Ael
ectr
ic a
ctua
tors
, Typ
e N
o. 5
2 02
0 –
52 0
25
Dim
ensi
on
[mm
]Ty
pe c
ode
52 0
20
52 0
2152
022
52 0
2352
024
52 0
25
AB
CD
EF
G∅
HJ
K
200
9031
080
310
165
475
160
9912
0
240
120
320
9240
823
063
822
4–
144
290
145
380
123
553
256
809
300
–19
0
345
178
440
153
665
290
955
375
–23
4
Dim
ensi
on
[mm
]Ty
pe
mar
king
52 0
26
AB
CD
EF
G∅
HK
345
178
690
415
665
290
955
375
450
NO
N-P
ASSA
BLE
(BRE
AK-T
HRO
UG
H) O
PEN
ING
S
bush
ing
M32
x1.
5 fo
r the
rang
e 10
– 1
7 m
m(E
xtra
wra
ppin
g) Posi
tion
indi
cato
rPo
sitio
n in
dica
tor
Actu
ator
s Ty
pe N
o.:
52 0
20 –
cab
le b
ushi
ng
M25
x 1
.5 (9
-16
mm
), 52
021
, 52
022
– M
25 x
1.5
(9-1
6 m
m)
*52
024,
52
025
– M
32 x
1.5
(10-
17 m
m)
*ext
ra w
rapp
ing
NO
N-P
ASSA
BLE
(BRE
AK-T
HRO
UG
H) O
PEN
ING
S

15
Connecting dimensions of the MODACT MOA electric actuators, type codes 52 020 – 52 026
b2
∅ d7
∅ d6
∅ d2
∅ d3
∅ d1
d4
h2h4
≤ h h1
h
b4
d4
∅ d2
∅ d3
∅ d1
t3
dg
l6h4
≤ h
h 1h
DimensionShape
Type designation and type codes
MOA 40 (63)
52 020
MOA 160
MOA 250
52 021
52 022
MOA 400
(MOA 630)
52 024
MOA 1250
52 025
MOA 2000
52 026
d1 diam.
approx. 125 175 210 300 350
values
d2f8 diam. 70 100 130 200 230
d3 diam. 102 140 165 254 298
d4 M 10 M 16 M 20 M 16 M 20
number of
threaded 4 4 4 8 8
holes
h1 min.12.5 20 25 20 25
1.25 d4
h max. 3 4 5 5 5
d7 diam. 40 60 80 100 120
h2 10 12 15 16 18
b2 H11 14 20 24 30 40
d6 diam. 28 41,5 53 72 72
d9 H8 diam. 20 30 40 50 60
16 min. 55 76 97 117 127
t3 22.8 33.3 43.3 53.8 64.4
b4Js9 6 8 12 14 18
C, E(common
data)
C
E
The dimensions d6 diam. and l6 may not be smaller than listed in the table.The dimensions are listed in mm.
SHAPE C SHAPE E

16
Mo
untin
g h
ole
s o
n th
e M
OD
AC
T M
OA
actu
ato
rs
52 0
20
52 0
21, 5
2 02
2
52 0
24
52 0
25, 5
2 02
6
Typ
e co
de
Dim
ensi
on
[mm
]
AB
dia
m C
1)
DE
6111
0M
10
1612
0
9016
0M
12
2114
0
110
210
M 1
623
200
120
240
M 2
047
220
Type
cod
e
Forc
e [N
]
52 0
2052
021
52 0
2452
025
52 0
2252
026
∅ C
∅ C
∅ C
A
B
DE
kab
elo
vá
vývo
dka
o
vlád
ání
No
te 1
)T
he a
ctua
tor
fast
ener
s d
iam
. C
may
no
t b
e ex
po
sed
to
gre
ater
fo
rces
tha
n th
ose
list
edin
the
tab
le.
1000
20
00
4000
60
00
MO
DA
CT
MO
Ace
nter
of
gra
vity
52 0
20.2
022S
52 0
22.2
012S
52 0
24.2
042S
52 0
25.2
022S
52 0
26.2
002S
Act
uato
r ty
pe
cod
e
+z 0
0
-x
+y
Cen
ter-
of-
gra
vity
co
ord
inat
es
x [m
m]
y [m
m]
z [m
m]
Act
uato
rw
eig
ht
[kg
]
-17
2122
35
-56
0135
68
-82
5155
131
-153
6,5
161
212
-97
0331
318
Max
. fo
rce
for
auxi
liary
act
uato
r m
oun
ting
Ope
ratin
gca
ble
bush
ing

17
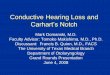
Internal wiring diagram of MODACT MOA actuators
LEGENDSQFC1 (MO) – torque switch "open"SQFT1 (MZ) – torque switch "closed"SQC1 (PO) – positional end switch "open"SQT1 (PZ) – positional end switch "closed"SQC2 (SO) – positional signalling switch "opening"SQT2 (SZ) – positional signalling switch "closing"BQ – remote transducer (potentiometer) M – three-phase asynchronous motor
CPT 1AA – current transducerEH – heating resistor
The micro-switches can only be used within one circuit.The micro-switches used do not make it possible to app-ly to the contacts of the same one two voltages differingin value or phase.The micro-switch contacts are drawn in their intermedia-te position.
- with resistance transducer 100 Ω
- with current transducer 4÷20mA

∅ d3
∅ d1
∅ d2∅ d4
18
52 02052 021 52 02552 022
52 024 52 026
Dimension
Type code
60 90 98
50 75 86
80 120 110
70 160 100
The version for the rising spindle
lid
gasket
d1
d2
d3
d4
3x M4x10
ČSN 02 1155
box lid
protective sleeve

1919
LIST OF SPARE PARTS FOR ACTUATORS MOAPower and control part (five-year operation)
Drawing
/ standard No. Pieces Use
Type Part name
No. & ČJK
52 020 Sealing ring 125x3 ČSN 029281.2 2 Sealing between box of power gearing and flange2327311049 with gearwheelsGasket 224612300 1 Gasket of board lidSealing ring 130x3 ČSN 029281.2 1 Sealing between control box and box of power gearing2327311041Sealing ring 43x35 ČSN 029280.2 1 Sealing of output shaft in control box2327311008Sealing ring 10x6 ČSN 029280.2 1 Sealing of shaft of moment tripping2327311001Sealing ring 170x3 ČSN 029281.2 1 Sealing of control box lid2327311054Ring "Gufero" 40x52x7 232735066 ČSN 029401.0 1 Sealing of output shaft in control boxSealing ring 32x2 ČSN 029281.2 1 Sealing of glass of local position indicator2327311037Gasket 224612280 1 Gasket under lid of opening for rising spindle of valveSight hole 2332111121 4-62847 1 Lid of local position indicatorMicro-switch B 613-1 1 Micro-switches SQFC1, SQC22337441069Micro-switch B 613-2 1 Micro-switches SQT2, SQFT1, SQT1, SQC123337441070Sealing ring 36x2 ČSN 029281.2 1 Sealing of lid of moment spring2327311038Ring "Gufero" 40x52x7 ČSN 029401.0 2 Sealing of output shaft in box of power gearing2327352066Ring "Gufero" 17x28x7 ČSN 029401.0 1 Sealing of shaft of hand wheel2327352023Sealing 16/22 224580840 2 Sealing of threaded plug (for oil filling)Gasket 224612310 1 Gasket between control box and terminal board
52 021 Sealing ring 160x3 ČSN 029281.2 1 Sealing between box of power gearing and flange+ 2327311048 with gearwheels52 022 Gasket 224610540 1 Gasket of terminal board lid
Sealing ring 190x3 ČSN 029281.2 1 Sealing between control box and box of power gearing2327311056Ring "Gufero" 55x70x8 ČSN 029401.0 1 Sealing of output shaft in control box2327352083Sealing ring 10x6 ČSN 029280.2 1 Sealing of shaft of moment tripping2327311001Sealing ring 190x3 ČSN 029281.2 1 Sealing of control box lid2327311056Sealing ring 60x50 ČSN 029280.2 1 Sealing of output shaft in control box lid2327311090Sealing ring 32x2 ČSN 029281.2 1 Sealing of glass of local position indicator2327311037Gasket, size 3 224610741 1 Gasket under lid of opening for rising spindle of valveSight hole 4-62847 1 Lid of local position indicator2332111121Micro-switch B 613-1 1 Micro-switches SQFC1, SQC22337441069Ring "Gufero" 60x75x8 ČSN 029401.0 1 Sealing of output shaft of power gearing box2327352090Ring "Gufero" 22x32x7 ČSN 029401.0 1 Sealing of shaft of hand wheel2327352034

Sealing ring 95x85 ČSN 029280.2 1 Sealing of insert with rings "Gufero" in power box2327311029Sealing ring 50x2 ČSN 029281.2 1 Sealing of lid of moment spring2327311028Sealing ring 16x22 224580840 2 Sealing of threaded plug (for oil filling)Gasket 224642240 1 Gasket between electric motor and flange
with gearwheelsGasket 223527530 1 Gasket between control box and box of terminal boardMicro-switch B 613-2 1 Micro-switches SQT2, SQFT1, SQT1, SQC123337441070
52 024 Sealing ring 200x3 ČSN 029281.2 1 Sealing between box of power gearing and flange2327311044 with gearwheelsGasket 224610540 1 Gasket of terminal board lidSealing ring 200x3 ČSN 029281.2 1 Sealing between control box and box of power gearingRing "Gufero" 80x100x13 ČSN 029401.0 1 Sealing of output shaft in control box2327352097Sealing ring 10x6 ČSN 029280.2 1 Sealing of shaft of moment tripping2327311001Sealing ring 200x3 ČSN 029281.2 1 Sealing of control box lid2327311044Sealing ring 75x65 ČSN 029280.2 1 Sealing of output shaft in control box lid2327310991Sealing ring 32x2 ČSN 029281.2 1 Sealing of glass of local position indicator2327311037Micro-switch B 613-2 1 Micro-switches SQT2, SQFT1, SQT1, SQC123337441070Sealing ring 125x110 ČSN 029280.2 1 Sealing of insert with rings "Gufero" in power box2327311019Gasket, size 4 224611130 1 Gasket under lid of opening for rising spindle of valveSight hole 4-62847 1 Lid of local position indicator2332111121Micro-switch B 613-1 1 Micro-switches SQFC1, SQC22337441069Ring "Gufero" 80x100x10 ČSN 029401.0 2 Sealing of output shaft in box of power gearing2327352096Ring "Gufero" 27x40x10 ČSN 029401.0 1 Sealing of shaft of hand wheel2327352044Sealing ring 70x2 ČSN 029281.2 2 Sealing of lid of moment spring2327311058Gasket 224591530 1 Gasket between electric actuator and flange with
gearwheelsSealing 16/22 224580840 2 Sealing of threaded plug (for oil filling)Gasket 223527530 1 Gasket between control box and terminal board
52 025 Gasket 224593370 1 Gasket between electric actuator and flange with gearwheels
Sealing ring 280x3 ČSN 029281.2 1 Sealing between flange with gearwheels and box2327311078 of power gearingGasket 224610540 1 Gasket of terminal board lidSealing ring 260x5 ČSN 029281.2 1 Sealing between box of power gearing 2327311046 and control boxRing "Gufero" 85x120x13 ČSN 029401.0 1 Sealing of output shaft in control box2327352098Sealing ring 10x6 ČSN 029280.2 1 Sealing of shaft of moment tripping2327311001Sealing ring 200x3 ČSN 029281.2 1 Sealing of control box lid2327311044
Type Part name
No. & ČJK
20
Drawing
/ standard No. Pieces Use

Type Part name
No. & ČJK
Sealing ring 90x80 ČSN 029280.2 1 Sealing of output shaft in control box lid2327311011Sealing ring 32x2 ČSN 029281.2 1 Sealing of glass of local position indicator2327311037Gasket 224611130 1 Gasket under lid of opening for vertical spindle
of valveSight hole 2332111121 4-62847 1 Lid of local position indicatorMicro-switch B 613-1 1 Micro-switches SQC2, SQFC12337441069Ring "Gufero" 105x130x13 ČSN 029401.0 2 Sealing of output shaft in box of power gearing2327352109Ring "Gufero" 30x50x12 ČSN 029401.0 1 Sealing of shaft of hand wheel2327352054Micro-switch B 613-2 1 Micro-switches SQT2, SQFT1, SQT1, SQC123337441070Sealing ring 90x2 ČSN 029281.2 1 Sealing under lid of moment spring2327311081Sealing 16/22 224580840 2 Sealing of threaded plug (for oil filling)
52 026 Spare parts for type no. 52 026 are same as for type no. 52 025 completed with:
Ring "Gufero" 150x180x15 ČSN 029401.0 1 Sealing of output shaft of gearbox2327352108Ring "Gufero" 95x125x13 ČSN 029401.0 1 Bottom sealing of central wheel2327352107Ring "Gufero" 105x130x15 ČSN 029401.0 1 Top sealing of central wheel2327352109Gasket 224612480 1 Gasket between electric actuator and differential gearingGasket 224612590 1 Gasket between flange with bearing and differential
gearingGasket 224612580 1 Gasket between flange and flange with bearing
21
Drawing
/ standard No. Pieces Use

TTRRAADD
IITTIIOONN
QQUUAALL
IITTYY
RREELLIIAA
BBIILLIITTYY
Deliveries of assembled actuator + fitting (or MASTERGEAR gearbox) combinations
SURVEY OF PRODUCED ACTUATORSKP Mini
Electric part-turn actuators (up to 30 Nm)
Modact MOK, MOK-P, MOK-P EExElectric part-turn actuators for ball valves and flaps
Modact MON, MONED, MOPEDElectric multi-turn actuators
Modact MO EExExplosion proof electric multi-turn actuators
Modact MOAElectric multi-turn actuators for nuclear power stations
application outside containment
Modact MOA OCElectric multi-turn actuators for nuclear power stations
application inside containment
Modact Variant MPRElectric part-turn lever actuators with a variable output speed
Modact Konstant MPSElectric part-turn lever actuators with a constant output speed
Modact MTNElectric linear thrust actuators with a constant output speed
Electr ic actuators and swi tchboardsDevelopment, production, sales, services

tř. 5. května 166289 11 PEČKY, Czech Republice-mail: [email protected]
tel.: +420 321 785 141-9fax: +420 321 785 165
+420 321 785 167