Embed Size (px)
Citation preview

E L S E V I E R Sensors and Actuators A 54 ( 19961 741-745 A
Electrical levitation for micror~otors, microgyroscopes and microaccelerometers
G. He a.~, K. Chen a, S. Tan b, W. Wang b "Department of lnJbrPnatknl and Electronic E~lgineering. Zhe]iang Universffy. Hangzhou 310008. China
State Key Labo~tory of Transducer Technnlogy. Shanghai Inshture of Metallurgy. Chinese Academy of Sciences. Shanghai 200050. China
Abstract
Electrical levitation is an excellent candidate method for solving the problem of surface-contact friction resulting from the instability of mtors in micrometers. One of the most important aspects of electrical levitation is the achievement of stable equilibrium suspension. The theories and experiments in previous work are not sufficient for practical application of electrical levitation in microslectromechanicalsystems (MEMS). In particular, there are unrestrained rotatable disc stmcmrcs in these devices. In this paper, the developed stable conditions of electrical levitation using three independent resonant circuits are presented, ann the experimental procedure related to it is described. Finally, the application of electrical le,vitation in miernmotnP,~, electrostatic micmgymscopes and microaccelerometers is examined.
geytvords: Electrical levitation; Stability; Micromutors; Eletarostatic microgytvseopes; Micv~:celemmeters
1. Introduction
Electric suspension is impractical fur most mat;~scopic applications because it requires a very high electric field strength that could make air break down to levitate objects [ 1 ], However, it is ideally suited for microactuators and microsensors such as micrometers, electrostatic microgyro- scopes and microaccelerometers, and is proposed as an excel- lent candidate method for solving the problem of friction and wear in these devices [ 1~5].
The biggest advantage of the proposed induction electric suspension is that stable levitation is achieved without requir- ing the use of feedback sensors and controllers, but its draw- back is that the restoring forces and levitation stiffness are smaller than other suspensions. Therefore, the achievement of stable equilibrium suspension is one of the most important aspects of the practical application of electrical levitation in micronlectromechanical systems (MEMS). The theories and experiments of levitating square plates have been studied in previous work [ 1-3]. However, in many practical applica- tions, there are unrestrained rotatable disc structures in MEMS devices and the previous work is insufficient. In this paper, the developed stable conditions of a disc plate in an
1 Present addless: Department of Elecffonic and Electrical Engineering, Hung Kent University of Science and Technology. Cleat Water Bay. Kowluon, Hung Kent+ Tel.: 852 2358 8842, Fax: 852 2358 1485 E-maih ¢[email protected],hk,
0924-4247/96/$15.00 © 1996 Elsevier Science .A. All rights ~'eserved PlISO924-4247t96)OI140-5
electric levitation system with three independent resonant circuits are presented, the effect o f the variation oflevitafion circuit parameters on the levitatiot, stability is given and the experimental procedure related to the practicality of this induction electric suspension design is described: a 3 cm diameter and 0.2 mm thick circular glass disc was levitated and held stable in all six degrees of freedom. Finally, the application of electrical levitation in micrometers, electrostatic microgyroscopes and microaccelerometers is examined.
2, Theory o f electrical levitation
The configuration of the studied electric levitation system with three non-equilibrium ,csonant circuits is sghematieany shown in Fig. I.
Similar to the method used by Kumar et al. [ 2 ], the second- approximation stability stiffness constants of the levitation plate in each mode are [7]

742 G. He et aL ~Sensors and Actuators A 54 (I 996) 741-745
A n ~ ator Nate
~ s , t ~ s Levitation Plate
[ plas~d on the suppod plate ofloinalb / [
(a) (b) Fig. I. (a) Configuration schematic of the three-circuit electrical levitation system. (b) Design of the three conducting pads of the levitation plate, A, B, C ale the levitation force points and a is the moment ann ,
C~o
3c~ a~ ~ L--;~ c,~ a~.~x C~o ~ 21~do,_~ °' 2 aC, I i, ,~ °'
3Czoa2 3 [.=..~ Cv a a l~2\ £~ak4, J g~o= - " 2 T ~ 2 V ' I V " + - - " - " ~ l - - - y ~ V ."
2~,ao ~ t °' 2 ac , / i , , : , ~'
1 3 _ _
where
"¢~ [ (L~C~o~ ~ - 1 )2 + (RC~, )2 ] t/2
is the high-frequency voltage across the levitation capaci- tance, and the i = 1,2,3 represent the three resonant circuits; 17' is the source voltage, t% is the source frequency, and C,~C~o+Cv~, L~ and R represent the resonant capacitance, inductance and resistance reslr..ctively, while C~o is the levi- tation capacitance when the plate is at the equilibrium position and Cpi is the parasitic capacitance; m is the mass of the plate, 1~ ( j=x ,y , z ) are the moments of inertia of the plate; do rep- resents the equilibrium levitation distance and a is the moment ann of the levitation forces; k~ ( j = x, y, 0, q~, ~b) are the second parameters of the Taylor-series expansion of lev- itation capacitance about the equilibrium position in terms of the coordinate system fixed to the centre of the plate, and they are positive constants.
The stability stiffness constants show the motion-stable characteristics of the plate in all six modes. The stability of each mode is guaranteed i f and only if these constants are positive, that is K,~>0 ( i = X, Y, Z, ~. ~, gO.
(1) W e could drive the developed stable conditions of the system in the vertical mode:
Kzo = C~o-~-J ~-. ,.do2 .~
xL iC ' t ° s2 - l+ t°a2Cpj (L i -RCi - t ° s2L iCf )>O (2) [ ( L, Citos 2 - l ) 2 + (RC~cos)2] 2
In practical application, R ~ I 0 2, C i, Cpi~--]0 -12 F, L, = 10- 5 H. Suppose the parameters in all three circuits are approximate equal and the i is omitted, we could obtain:
(LCws 2 - 1) (LCpws 2 - l ) < 0
Because C = C~.o+ Cp, this gives 1 1 ~ < to. < - - ~ p (3)
( 2 ) The stable condition in tilt movie revised by practicality according to ko of an a X a square ?late, a2/4do 2, should be driven as [7] :
K C:'ca2~s'~2 ~ = ' } - ~
X['3 ~ LiCitog 2 - l + ¢os2Cpj( L~ - RC~ - o~.2LIC,)
/ ~ , ~ ( ( r ,c ,~ , : - ~)~ ~ R c , ~ ) - ~ ~
I 3 I ] -- >0 - 4 ~ (r.,c,~?- 1>~ + <sc,~o) 2] <4)
3. Exper iments and results
The levitation system consists of the levitation plate, the stator, the resonant circuits and source. The levitation plate is a 3 cm diameter and 0.2 m m thick glass flat on which three conducting pads are designed and fabricated, above which the stator plate, with three sets o f conducting pads on it, is connected to resonant circuits with levitation inductors and resistors and is mounted on a similar X-Y-Z table. Three

G. He et aL / Se~sors ~ d Actuators A 54 (1996) 741-745
Stet~
Lwltet~on di~ (about 20(~mJ
o am ~r 9 n a ~ p
(a)
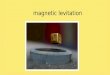
Fig. 2. (a) Demonstration of the system configuration. (b) Close-up pho- tograph of the levitation plate.
resonant circuits arc necessary to stabilize the levitation plate { 3 ]. The parasitic capacitance of each circuit is measured as C N ffi6.01 pF, C p 2 = 6 . 5 7 pF, Cp~=6.63 pF by the direct frequency sweep tcchnique, and the indocturs are set to L] = 19,27 p.H,/.2 = 17.98/.tH,/,3 = 17.68 pal, respectively, in order to achieve resonance at the frequency 14.5 MHz (according to Eq. (3)) , a little higher than the supply fre- quency 13.56 MHz, when the levitation plate is absent. All resistors are identical, R t =R2ffiR~fR= I00~ . The source voltage could be adjusted from 0-150 V continuously.
The experimental procedure is as follows. First, the levi- tation plate is placed on the support plate and the conducting pads are aligned to those of the stator plate. The source voltage is increased steadily and the impedance-matching circuit is tuned. Secondly, the levitation plate is levelled. In contrast to other work [ 2 ], the source vultage does not exceed about 100 V (point B in Fig. 4) until the three circuits are well before resonance and post resonance (point Din Fig, 4) as measured by a high-frequency voltage meter at point A in Fig. 1 (a). (The reason for this will be presented in detail later.) Then, the support plate is pLzt down to increase the gap by about 100/~m, and the levitation plate can be held steadily. After dlat, even if th~ s~pp~t plat,~ is p~t do~,u again, the levitation plate holds its steady position and does not drop. Equilibrium and robust stableness of electrical levitation in all six degrees of freedom is achieved. Fig. 2 is a close-up photograph of the levitation plate.
4. Discussion and conclusions
( 1 ) According to the experimental configuration, we cal- culated the practical levitating stiffness constants Kzo, Kso with Eqs. (2) and (4). We have also stimulated the situation of equilibrium of the three resonant circuits while the par- asitic capacitances and inductances are set equal: Cp,' =Cp2 r= Cp3 #= (Cpl + Cp2 + Cp~) / 3, L, ' = L f l = L f l = (L z +I-2+1,3)13, and the situations of the parasitic capaci- tance and inductance are set as: CN'=C N, Cp2~=Cp2 , Cpf=Cp3, L~'=L2"=L3"=( L, 4 L2+L3)/3. Three calcu- lated results are compared in Fig. 3. ~ Ve obtain the following conclusions: the effects of parasitic capacitance dispersed in three resonant circuits on the levitation stability are different according to various experimental methods, and could be lower if the natural frequencies of the three resonant circuits are compensated by adjusting the inductors. We have used
743
this method successfully in experiment. Otherwise, the stable levitation gap range would be reduced (Adol~:~>o.~.~ <AdoIK~>OaoM as shown in Fig. 3) and in extreme cases stable levitation could not be obtained.
(2) The levitation force and thc r.f. voltage across the levitation capacitance via the gap between the levitation plate and stator are calculated and the results are shown in Fig. 4. During the experimental procedure, air breakdown can easily occur if the source voltage is increased at point B (at nance) in Fig. 4 where the levitation force is small and the levitation voltage is the largest. But it can be avoided if the source voltage is increased at point D (post resonance).
(3) In electrostatic micromotor applications, besides the stable levitation of the plate, it is necessary to consider iftbe levitation plates can rotate freely. However, the levitation plate in Fig. I is stable in yaw mode because of the three separated conduedng pads. The levitation stiffness constant g,te = 0 can be. obtained if the three conducting pads become one (as shown in Fig. 5 [5}). 'The levitation voltage V~ ( i= 1,2,3) is the key factor of levitation stability, and the calculated results for V¢~ with two different levitation plate conducting pads structures by PSPICE are: (a) V¢1' = 322 V, V~2'=334 V, Vc3' =336 V; (b) Vc1"=327 V, Vc~=332 V, Vc3"=333 V. The dispersed maximum values of V~ are: A m a x ( V ~ - V ~ ) [ ~ = 14 V < Amax(V~-V~)1~,=6 V ( i j= 1,2,3). We obtain the following conclusions: if the
I i l /:,]
Fig. 3. The effects of the vanalien of levitalion ¢i[~uit Imnunel~rs on Ihc lavila~on stability £~. leo. - - . Cpl. Cry. Cp~, Lj, I~. L3 set as p~ctic ,,I expcdz'rcm. -0-, Cp,'=C~,, Cp2"=C~, Cp~=C~, Lz ' - ~ " - L~' - tL ,+~+~) /3 . -O-, C.,'=Cv.'=C~'=tCp~+Cpz+cp,). L , ' =L~ ' =L~ ' = (L , +L2+/q) /3 .

744
0.1
G. He et aL /Sensors and Actuators A 54 (1996) 741-745
za, ao'
0.05 ~ d / / l \ 1.SWlO I - -
. - - ~ m; ~um i • n
"O '~ .e t~;~10-~ 1.~10 "~ ~.fl~lO "° a6xnT 4 ~ 1 ~ xlOP
Gap Distance (ml
Fig. 4. Levilation force and levitation vollage via the gap between the levi- tation disc and stator.
' X
( a ) ( b )
Fig. 5. Two di ffereat conducting pads structures of the levitation disc plates. (a) Disc with three separated conducting pads. K~,0 * 0. tb} Disc with one ring conduc!ing pad. K~ = 0.
a
- // > 4
o . . . . . . . . . . . . . . . . . . . . . . . . . . . .
AccelereUon (g) Fig. 6. Levitation voltage vs, acceleration.
three separated conducting pads become n ring one in the disc electrical levitation bearing, not only can the levitation stiff- ness constant K ~ = 0 be obtained, but also the ledtation stability could be increased. In our recent experiments, an unrestrained electrical levitation bearing in yaw mode has indeed been achieved. We are now pursuing micromotors and electrostatic microgyroscopes based on frictionlass, wanrless, and open-loop stability electrical levitation bearings.
(4 ) The calculated results between the r.f. voltage across the levitation capacitance and the acceleration applied to the silicon levitation disc with a 50 v.m diameter and 2 brm thick silicon plate are shown in Fig. 6. We use the following designed system parameters: source voltage 50 mV, source
frequency 300 MHz, parasitic capacitance 10 - ~ pF, resonant inductor 0 .26/zH, resistor 50 ~ . According to the calculated results, a O. l - IO00g measurement range and 10-Sg resolu- tion (measured by a five-bit digital voltmeter) miaroacceler- ometer cap be obtained.
Acknowledgements
The authors thank Dr M.Y. Moo, Mr T.P. Wang and Mr X.D. Wang for their useful discussion in building the levitation apparatus, and Ms J .E Jic for her assistance in fabricating the levitation plate.
References
[ i ] s Kumar and W Cart, A proposal for elecldcallylevitating micrometer, SensorsandAcluawrsA, 24 { 1990) 141-149.
12] S. Kumar. Dan Cho and W N. Carl Expedmental study of electric suspension for microbearings. J. MEMS, I (19921 23-30.
13J S. Kumar and Dan Cho, Electrostatically levitated microactuatars. J. M;cromeeh. Microeng. 2 (1992) 96-103.
(4] G.H He, K.S. Chen. S.S. Tan and W.Y. Wang, Electrical Icvilation microactuators, Proc. 4th National Sensors and Transducers, Beijing. China, 16-18 June, 1993, pp. 6084509.
[ S ] G.H. He, Elecldc suspension microbeadngs, Chinese patent applied for. i6] G.H. He, K.S. Cben, S.S. Tan and W.Y. Wang. Eleclfical suspension
experiments, Prec. 5th National Sensors and Transducers. Shanghai. China, 16-18May, 1995, pp. 197-19S.
[ 7 ] G.H. He, The fuladatnental study of induclion electric suspension. Ph.D. Thesis. Zhajiang University, Hangzhou, China. 1994.
Biographies
Guohong He was born in Guiyang, China. He received the B.Se. and M.S. degrees in electron physics in 1984 and 1988 from Zhejiang University, and the Ph.D. degree in physical electronics and photonics in 1994 from Zbejiang University and Shanghai Institute of Metallurgy. Now he is an associate professor at Zbejiang University, His research interests are electrical levitation, electrostatic microaetuators and sensors, microgyroscopes, vacuum microclectronics, and terra- cathodes.
Kangshen Chen was born in 1939, Jiangshu, China. He received the B.Sc. degree in electron physics in 1962 from Zhejiang University, and the M.S. degree in thin solid film technology from Polytechnic Institute of New York. Now he is a professor, an IEEE member and the chairman of the Department of Information and Electronic Engineering, Zhejiang University. His research interests are microwave electronics, nonlinear optics, vacuum microeleetronies, microsensors and mieroactuators.
Songsheng Tan was born in Guangdong Province, China in 1938. He was a professor in Shanghai Institute of Metal-

G. He et at I Settvors and Actuators A 54 (1996) 741-745 745
lurgy, Chinese Academy of Sciences, China. He is now u scientist at Carnegie Mellon University, PA, USA.
Weiyuan Wang was born in Zhejiang Province, China in 1930. He is a professor and chairman of State Key Labora- tories of Transducer Technology, Shanghai Institute of Met-
allurgy, Chinese Academy of Sciences, China. His resenach interests include semiconductor materials and devices, mainly on silicon sensors and actuators, and Ge.~ high- speed devices. He is on the Board of Directors, Chinese Transducer Sociezy, and is the chairman of the Shanghai Sociely of Trans- ducer Technology, China.























![Piezoelectric Ultrasonic Micromotors - [email protected]](https://img.pdfslide.net/doc/110x75/6204ee814c89d3190e0cabb2/piezoelectric-ultrasonic-micromotors-emailprotected.jpg)