-
7/30/2019 Embedded Microcontroller Systems
1/58
Embedded Microcontroller Systems
-
7/30/2019 Embedded Microcontroller Systems
2/58
Overview
Performance metrics
Synchronization methods
I/O Devices and hardware interface issues
Microcontroller in control systems
Control block diagrams
Actuators, plant, sensors
Open loop, closed loop control
Proportional and integral controllers
-
7/30/2019 Embedded Microcontroller Systems
3/58
Performance Metrics
Latency time delay between when I/Odevice is ready for service
and when uCresponds.
input device time between when data isready and when it is
actually latched into uC
output device time between when device isready for new data and
when it is sent.
uCI/O Device
-
7/30/2019 Embedded Microcontroller Systems
4/58
Performance Metrics
Latency Hardware delays in uC subsystems
Software delays
uCI/O Device
-
7/30/2019 Embedded Microcontroller Systems
5/58
Performance Metrics
Throughput maximum data flow (bytesper second) that can be
processed from the
I/O device.
can be limited by uC or by I/O device
can be reported as long term average or short
term maximum
uC I/O Device
-
7/30/2019 Embedded Microcontroller Systems
6/58
Performance Metrics
Priority determines the order of service when
more than two or more devices request at the
same time.
determines if a high-priority device can suspend a low-
priority request that is currently being processed. may want to
implement equal priority so that no
device monopolizes the uC.
uC I/O Device
I/O Device
-
7/30/2019 Embedded Microcontroller Systems
7/58
Real time systems
Hard real-time guarantees a maximum
latency.
Soft real-time system supports priority.
-
7/30/2019 Embedded Microcontroller Systems
8/58
Synchronization Methods
I/O devices can be in one of 3 states
idle disabled or inactive, no I/O occurs
busy working on generating an input (input I/O)
or accepting an output (output I/O)
done ready for a new transaction.
Busy to done transitions cause status flags to
become true.
-
7/30/2019 Embedded Microcontroller Systems
9/58
Synchronization Gadfly Loop
Polling loop
Gadfly loop
Busy-waiting loop software checks statusflag in a loop that does
not exit until the status
flag is set.
waiting for
input - busy
new input is
ready - done
new data, gadfly loop completes
software reads data, asks for another
INPUTDEVICE:
-
7/30/2019 Embedded Microcontroller Systems
10/58
Synchronization Gadfly Scenarios
No Buffering
busy done busy done
Input Device:
waiting for new
input
read
data
process
data
waiting read
data
uC software: I/O bound
busy done
Input Device:
read
data
waiting
uC software:
process
data
CPU bound
read
data
process
data
busy done waiting
process
data
busy
-
7/30/2019 Embedded Microcontroller Systems
11/58
Synchronization Gadfly Scenarios
Buffering
busy done
Input Device:
read
data
uC software:
process
data
read
data
process
data
busy done
process
data
busy
BUFFER
done busy
As long as buffer
is large enough,
both software
and I/O canoperate at their
maximum rate
-
7/30/2019 Embedded Microcontroller Systems
12/58
Synchronization Blind Cycle
Software waits a fixed amount of time andassumes I/O will
complete within the delay.
No status flag from I/O device.
Used for I/O that has predictable delays.
busy done busy done
Input Device:
process
datawaiting read
data
uC software:process
datawaiting read
data
fixed delay
-
7/30/2019 Embedded Microcontroller Systems
13/58
Synchronization - Interrupts
Interrupts hardware causes software to
execute ISR.
Global data structures used to communicate data
between main program and ISR.
Timer interrupts used to execute specific functions at
regular intervals.
-
7/30/2019 Embedded Microcontroller Systems
14/58
Synchronization - Interrupts
Use interrupts when:
Arrival times of input is variable.
There are other things to do in main program.
I/O is important (alarm, hardware failure) butinfrequent.
Buffering can also be used with interrupts toallow for better
throughput.
Must not forget that interrupts slow the mainprogram loop!
-
7/30/2019 Embedded Microcontroller Systems
15/58
Buffering FIFO Queue
Data is received (Get) in the same order that it
was transmitted (Put)
As long as FIFO is not full or empty, both producer
and consumer operate at their own rate. Need a way for producer
and consumer to know if
FIFO is full or empty.
Producer
(uC or I/O)
Consumer
(uC or I/O)FIFOPut Get
-
7/30/2019 Embedded Microcontroller Systems
16/58
Synchronization Periodic Polling
Periodic polling uses a clock/timer interrupt
to periodically check the I/O status.
Used in cases where interrupts are desirable
(there is much to do in the main program) but the
I/O device does not support interrupts.
Keypad is an example will investigate in the next
exercise.
-
7/30/2019 Embedded Microcontroller Systems
17/58
Synchronization - DMA
Direct Memory Access I/O transfers datadirectly to/from
memory.
Requires a DMA controller between memory
and I/O device. Used when bandwidth and latency are
important parameters.
Data transfer only no processing of data.
-
7/30/2019 Embedded Microcontroller Systems
18/58
DMA Burst mode DMA a block transferred while the
uC is halted used when uC and DMA rates are similar
Cycle-stealing DMA data is transferred during
cycles when the uC is not using the bus.
used when uC rate is faster than I/O
uC
DMA Controller
Memory
I/O
deviceaddr
data
-
7/30/2019 Embedded Microcontroller Systems
19/58
Slow I/O Interface
Keypad how slow can we go?
-
7/30/2019 Embedded Microcontroller Systems
20/58
I/O Devices and hardware interface
issues
Overview:
Categories of I/O Input and Output examples
Output actuator examples DC Motor (analog and digital
control)
Stepper Motor
Output display example
LCD display (parallel and serial)
-
7/30/2019 Embedded Microcontroller Systems
21/58
I/O Categories Input devices
Sensors, User-input
Output devices Actuators, Displays
Complex I/O devices (printers, faxes,
coprocessors, etc)
Analog I/O Digital I/O Voltage levels - Voltage levels
Current draw - Synchronization Sampling frequency -
Throughput
Noise - Noise
-
7/30/2019 Embedded Microcontroller Systems
22/58
Input Examples
Sensors light
force
sound
position
orientation proximity
tactile
temperature
pressure
humidity speed
acceleration
displacement
User input
keyboards
joysticks
mouse
keypad switches
touchpad
dial
slider
-
7/30/2019 Embedded Microcontroller Systems
23/58
Output Examples
Actuators
motors
solenoids
relays
heaters
lights
piezoelectric materials
(buzzers, linear actuator)
speakers
Displays
LED displays
LCD displays
CRT displays
indicator lights
indicator gauges
-
7/30/2019 Embedded Microcontroller Systems
24/58
Example DC Motor
Important in LOTS of applications cameras, drives, elevators,
trains, robots
Many types, but all work similarly:
Apply voltage across + and leads,
electrical energy is converted to
mechanical energy.
For some range of voltage, the torque of
the motor shaft is proportional to value of
voltage.
-
7/30/2019 Embedded Microcontroller Systems
25/58
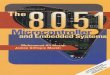
DC Motor
Current required bymotor depends on
how it is loaded.
Current is almostalways more than the
uC can provide.
Need an interfacecircuit between uC
and motor.
Applied voltage (volts)
no load
loaded
Motorcurren
t(A)
-
7/30/2019 Embedded Microcontroller Systems
26/58
Interfacing MotorsDigital Outputs
Basic idea is to use aswitch of some kind toisolate current in
uCfrom motor current.
Motor is an inductorthough, so it storescurrent.
Flyback diode used toroute current away
from switch whenswitch opens to avoiddamage to switch.
motor
External Voltage
+
Controlsignal from
uC
flyback diode
switch open current
-
7/30/2019 Embedded Microcontroller Systems
27/58
Interfacing MotorsDigital Outputs
H-Bridge circuit topology that allows bi-
directional control of motor.
motor
+
external
voltage
-
Each switch
controlled by anoutput of the uC.
Switches
implemented by
relays, solid-stateswitches, or transistors
Diodes omitted for
simplicity.
-
7/30/2019 Embedded Microcontroller Systems
28/58
Interfacing MotorsAnalog Output
8051 DAC can provide up to 15 mA of
current, up to 3.3V voltage.
Must provide both voltage and current
amplification to drive a DC motor.
Amplifiers
Power MOSFETs
Motor driver ICs
Relays
used in the upcoming control lab
-
7/30/2019 Embedded Microcontroller Systems
29/58
Stepper Motors
Inherent digitalinterface
Can easily control
both position and
velocity
Used in disk drives,
printers, etc.
Small, fixed rotationper change in control
signals
http://images.google.com/imgres?imgurl=www.interq.or.jp/japan/se-inoue/picture/step1.jpg&imgrefurl=http://www.interq.or.jp/japan/se-inoue/e_step.htm&h=382&w=533&sz=25&tbnid=fRACYB_AJrkJ:&tbnh=92&tbnw=128&start=7&prev=/images%3Fq%3Dstepper%2Bmotor%26hl%3Den%26lr%3D%26ie%3DUTF-8%26oe%3DUTF-8%26sa%3DG
-
7/30/2019 Embedded Microcontroller Systems
30/58
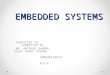
Basic Operation
Simplified stepper motor
+
phase 1
-
-
phase 2
+
5 teeth
360 5 = 72
moves 72per step
Changing polarity of
stator magnets causes
step.
Typical stepper motors
have 200 steps per
revolution, with 1.8
per step.stator
rotor
electromagnets
-
7/30/2019 Embedded Microcontroller Systems
31/58
Stepper Motor Interface
8051
port
pins
A
A
B
B
VDD
Inverting
buffers
+Vmotor
1010
1001
0101
0110
1010
4-phase
stepper
motor
1.8
1.8
1.8
1.8
-
7/30/2019 Embedded Microcontroller Systems
32/58
Output Display Example:
LCD Display
LCD Liquid Crystal Display Lower power than LED display
More flexible in size and shape
Slower response time
http://images.google.com/imgres?imgurl=www.armyradio.com/Pictures/Radios/British%2520Radios/Ship%2520Speed%2520LCD%2520Display%2520B1.jpg&imgrefurl=http://www.armyradio.com/publish/Bits_and_Pieces.htm&h=280&w=516&sz=23&tbnid=V6QB4wcwzVgJ:&tbnh=69&tbnw=127&start=5&prev=/images%3Fq%3DLCD%2Bdisplay%26hl%3Den%26lr%3D%26ie%3DUTF-8%26oe%3DUTF-8%26sa%3DGhttp://images.google.com/imgres?imgurl=www.irtrans.de/images/products/lcd-blau-640.jpg&imgrefurl=http://www.irtrans.de/lcd.htm&h=394&w=640&sz=28&tbnid=giPgHHLkoMAJ:&tbnh=83&tbnw=134&start=13&prev=/images%3Fq%3DLCD%2Bdisplay%26hl%3Den%26lr%3D%26ie%3DUTF-8%26oe%3DUTF-8%26sa%3DG
-
7/30/2019 Embedded Microcontroller Systems
33/58
LCD Operation AC voltage required DC voltage damages LCD
Control changes reflectivity of the liquid crystal
material.
Actual light energy supplied by room light or back
light. front plane
liquid crystal material
back plane
60 Hz
Oscillator
control
CMOS
-
7/30/2019 Embedded Microcontroller Systems
34/58
LCD Interfacing
Simple parallel interface similar to LED:
8051
7-segment
LCD
Driver/Decoder
port
pins
A
B
C
D
ab
c
d
e
f
g
60 Hz
Oscillator
Common Back Plane
Separate Front Planes
VDD
-
7/30/2019 Embedded Microcontroller Systems
35/58
LCD Interfacing
Serial driver interface
48 bit shift register
48 bit latch register
MC145000 LCD Driver
BP1 BP2 BP3 BP4 FP1 FP2 FP3 FP4 FP5 FP6 FP7 FP8 FP9 FP10 FP11
FP12
48 segment LCD display
data in
clock
data out
-
7/30/2019 Embedded Microcontroller Systems
36/58
Using Microcontrollers for Control
Overview
Open-loop control systems
Simple closed-loop control systems
Closed-loop position control
PID controllers
-
7/30/2019 Embedded Microcontroller Systems
37/58
Some Terminology
Control variables properties we want to
control (position, velocity, temperature, etc)
Control commands output to actuators
Driving forces the actuator forces that cause
the control variables to change (heat, force,
etc)
Physical plant the thing being controlled
-
7/30/2019 Embedded Microcontroller Systems
38/58
Open-loop Control Systems
No feedback path from the plant
Note that these are all a function of time
uC ActuatorsPhysical
Plant
Desired
control
variables
X*(t)
Controlcommands
U(t)
DrivingForces
V(t)
Real
controlvariables
X(t)
-
7/30/2019 Embedded Microcontroller Systems
39/58
Open-loop Control Example
Stepper motor
uC ActuatorsPhysical
Plant
Control
commands
U(t)
Driving
Forces
V(t)
Real
control
variables
X(t)
uC
Desired
control
variables
X*(t)Inverting
driving
buffers
steppermotor shaft position
desired
shaftposition
specified
in
program
-
7/30/2019 Embedded Microcontroller Systems
40/58
Open-loop Control Example
Traffic light controller
uC
Inverting
driving
buffers
desired light pattern
in software
-
7/30/2019 Embedded Microcontroller Systems
41/58
Closed-loop Control
Feedback from plant to controller
uC ActuatorsPhysical
Plant
Desired
control
variables
X*(t)
Controlcommands
U(t)
DrivingForces
V(t)
Real
controlvariables
X(t)
Sensor
Closed loop Control
-
7/30/2019 Embedded Microcontroller Systems
42/58
Closed-loop Control
Bang-bang control
Bang-bang control output can only turn somethingON or OFF. No
variable control.
Requires a deadband or hysteresis which definesa range of
acceptable values for output - otherwisethe control system
components can wear out fromtoo many switching cycles. (Relays, for
example, havea limited lifetime).
Works well with physical plant with a slow responsetime.
-
7/30/2019 Embedded Microcontroller Systems
43/58
Closed-loop Control Systems Bang-bang control temperature
control
example.
Heater
Temperature
sensor
uC
plant
Desired temperature,
Tlow < T < Thigh
estimate T
TT
Turn off Leave Turn on
T > Thigh T < Tlow
Flowchart of control algorithm
-
7/30/2019 Embedded Microcontroller Systems
44/58
Closed-loop Position Control
Incremental control adds or subtracts a small
constant from the output control command, U(t), in
response to X(t) sensed.
uC+1
or
-1
ActuatorsPhysical
Plant
Desired
control
variables
X*t
Controlcommands
U(t)
DrivingForces
V(t)
Real
controlvariables
X(t)
Sensor
-
7/30/2019 Embedded Microcontroller Systems
45/58
Incremental Control
Rate of sampling is very important
If sampling rate is too fast, actuators are saturated
and a bang-bang system results.
If sampling rate is too slow, then controller will notkeep up
with plant.
Rule of thumb for rate: control execution rate
is 10x the step response of the plant. Must check for underflow
and overflow after
increment or decrement.
Cl d l C t l
-
7/30/2019 Embedded Microcontroller Systems
46/58
Closed-loop Control
PID Controller
Faster and more accurate than previous systems.
Based on linear control theory.
Three components sometimes fewer are used.
Proportional output is linearly related to error signal.
Integral output is related to integral of the error signal.
Derivative output is related to derivative of the error.
PID C ll
-
7/30/2019 Embedded Microcontroller Systems
47/58
PID Controller To understand, must transform parts of control
diagram
into discrete time domain.
Very important to have periodic sampling and processing.
In the figure below, n is the sample number
uCPID
controller
ActuatorPhysical
Plant
Desired
output
x*u(n) p(t)
Real
controlvariables
x(t)
Sensor
x(n)
e(n)
error signal: e(n) = x*(n) - x(n)
+
-
PID C ll
-
7/30/2019 Embedded Microcontroller Systems
48/58
PID Controller
uCPID
controller
ActuatorPhysical
Plant
Desired
output
x*u(n) p(t)
Actual
Output
x(t)
Sensor
x(n)
e(n)+
-
u(t) = P(t) + I(t) + D(t)
Proportionaloutput is proportional to error input
Continuous time: P(t) = Kp * E(t)
Discrete time: P(n) = Kp * E(n)
PID C t ll
-
7/30/2019 Embedded Microcontroller Systems
49/58
PID Controller
u(t) = P(t) + I(t) + D(t)
Integraloutput is proportional to integral of error signal
Continuous time: I(t) = Ki E(t) dt
Discrete time: I(n) = Ki E(n) t = Ki t E(n)
t is sampling period
e(t)
t
I(t)
t
I(n)
n
t
1 2 3 4 5
I(n)
n
Ki large
I(n)
n
Ki small
-
7/30/2019 Embedded Microcontroller Systems
50/58
Equation for Integral Component
Discrete time: I(n) = Ki t E(n)
integral += errorsig; //integral = integral + errorsig
//integral is sum of errorsignals
//integral includes: M_MEAS samples of error//multiplied by
GAIN_PRECISION
...
output = Kp*errorsig / M_MEAS/GAIN_PRECISION +
Ki * integral / M_MEAS / SAMPLERATE /GAIN_PRECISION
= 1/t
PID C t ll
-
7/30/2019 Embedded Microcontroller Systems
51/58
PID Controller
u(t) = P(t) + I(t) + D(t)
Derivativeoutput is proportional to derivative of error
signal
Continuous: D(t) = Kd*dE
dt
E(n)E(n-1)t
Discrete: D(n) = Kd *
t is sampling period
-
7/30/2019 Embedded Microcontroller Systems
52/58
PI Controller for Position Control
uCPI
controller
ServoAmplifier
DC
Motor
uf
(n)p(t)
Actual
position
2(t)
Desired
position
1*
(potentiometer)
potentiometer
2(n) ub(n)
(we will not use the derivative term, which can cause
instability)
-
7/30/2019 Embedded Microcontroller Systems
53/58
PI Controller Hardware Setup
8051Microcontroller
ADC0
Input
voltage
conversion
interface
ADC0.0
ADC0.1
setpoint
potentiometer
output
potentiometer
0 - 2.45V
0 - 2.45V-15 to +15V
-15 to +15V
Output
voltageconversion
interface
DAC0
DAC1
0 - 2.45V
0 - 2.45V
multiplexor
DAC0
DAC1
to SA1SOD
Input 1
to SA1SOD
Input 2
-
7/30/2019 Embedded Microcontroller Systems
54/58
Circuit Schematics for Interface Circuits
Input voltage conversion interface Output voltage conversion
interface
-
7/30/2019 Embedded Microcontroller Systems
55/58
PI Control Algorithm
Controller must execute the following tasks:
Sample inputs
Compute error value
Compute integral value
Compute output signal from error value, integral
value and preset Kp and Ki.
Send computed output signals to amplifier
-
7/30/2019 Embedded Microcontroller Systems
56/58
Controller Performance Metrics
Stability a requirement
Response time how fast the output responds
to the input.
Steady state error how much the output
differs from the input after it has settled.
For position controller DEADBAND is a
measure of the steady state error.
-
7/30/2019 Embedded Microcontroller Systems
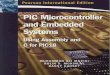
57/58
Total DeadBand Measurements
TDB(1) = |DB(1)| + | DB(-1)|
input position output position
1 2
DB (1) = 1- 2
repeat for a negative angle, - 1 DB (-1) = 2- 1
-
7/30/2019 Embedded Microcontroller Systems
58/58
Control your position!
Prelab software only