Embed Size (px)
Citation preview

7/30/2019 Embedded Microcontroller
http://slidepdf.com/reader/full/embedded-microcontroller 1/30
EMBEDDED MICROCONTROLLER – P89C51RD2
Bluetooth Based Temperature Control system is implemented by using
P89C51RD2 microcontroller, which is the 8-bit microcontroller developed by Philips.
89C51 Microcontroller:
The microcontroller used here is P89C51RD2BN.The expansion of the part
number of this microcontroller is given below.
The P89C51RD2BN contains a non-volatile 64KB Flash program memory that is both
parallel programmable and serial In-System and In-Application Programmable. In-System
Programming (ISP) allows the user to download new code while the microcontroller sits in the
application. In-Application Programming (IAP) means that the microcontroller fetches new program code and reprograms itself while in the system. This allows for remote programming
over a modem link. A default serial loader (boot loader) program in ROM allows serial In-
System programming of the Flash memory via the UART without the need for a loader in the
Flash code. For In-Application Programming, the user program erases and reprograms the Flash
memory by use of standard routines contained in ROM.
The device supports 6-clock/12-clock mode selection by programming a Flash bit using
parallel programming or In-System Programming. In addition, an SFR bit (X2) in the clock
control register (CKCON) also selects between 6-clock/12-clock mode. Additionally, when in 6-
clock mode, peripherals may use either 6 clocks per machine cycle or 12 clocks per machine
cycle. This choice is available individually for each peripheral and is selected by bits in the
CKCON register. This device is a Single-Chip 8-Bit Microcontroller manufactured in an
advanced CMOS process and is a derivative of the 80C51 microcontroller family. The

7/30/2019 Embedded Microcontroller
http://slidepdf.com/reader/full/embedded-microcontroller 2/30
instruction set is 100% compatible with the 80C51 instruction set. The device also has four 8-bit
I/O ports, three 16-bit timer/event counters, a multi-source, four-priority-level, nested interrupt
structure, an enhanced UART and on-chip oscillator and timing circuits. The added features of
the P89C51RD2BN make it a powerful microcontroller for applications that require pulse width
modulation, high-speed I/O and up/down counting capabilities such as motor control.
When the 89C51 microcontroller is connected to a crystal oscillator and is powered up,
we can observe the frequency on the XTAL2 pins using the oscilloscope.
CPU clock cycles
The time to execute the instruction is calculated by using the following expression,
MC Number of Machine Cycles for an instruction to execute and Cn is the number of clock cycles for one machine cycle. For 89C51RD2BN the number of clock cycles for one
machine cycle is 12. For example, If the number of machine cycles to execute a instruction is 1and the oscillator frequency used is 11.0592MHz, the time to execute an instruction is 1.085s.
Basic Features of 89C51
80C51 Central Processing Unit
On-chip Flash Program Memory with In-System Programming (ISP)
In Application Programming (IAP) capability
Boot ROM contains low-level Flash programming routines for downloading via
the UART
Supports 6-clock/12-clock mode via parallel programmer (default clock mode
after Chip Erase is 12-clock
6-clock/12-clock mode Flash bit erasable and programmable via
ISP
6-clock/12-clock mode programmable “on-the-fly” by SFR bit
State State
2
State
3
State
4
State
5
State
6One
Machine
C cle
Oscillator
Frequency f
P2 P2 P2 P1P2P2 P2P2 P1P1 P1P1 P1 P1
T (inst) = (MC Cn) / (cr stal fre uenc )

7/30/2019 Embedded Microcontroller
http://slidepdf.com/reader/full/embedded-microcontroller 3/30
Peripherals (PCA, timers, UART) may use either 6-clock or 12-clock mode while
the CPU is in 6-clock mode
Speed up to 20 MHz with 6-clock cycles per machine cycle (40 MHz equivalent
performance); up to 33 MHz with 12 clocks per machine cycle
Fully static operation
RAM expandable externally to 64-kilo bytes
Four interrupt priority levels
Seven interrupt sources
Four 8-bit I/O ports
Full-duplex enhanced UART
Framing error detection
Automatic address recognition
Power control modes
Clock can be stopped and resumed
Idle mode
Power down mode
Programmable clock-out pin
Second DPTR register
Asynchronous port reset
Low EMI (inhibit ALE)
Programmable Counter Array (PCA)
PWM
Capture/compare
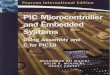
Pin Description
Examining the following figure, note that of the 40 pins a total of 32 pins are set aside for
the four ports P0, P1, P2 and P3, where each port takes 8 pins. The rest of the pins are
designated as Vcc, GND, XTAL1, XTAL2, RST, EA, ALE, and PSEN. Of these 8 pins, all 8051

7/30/2019 Embedded Microcontroller
http://slidepdf.com/reader/full/embedded-microcontroller 4/30

7/30/2019 Embedded Microcontroller
http://slidepdf.com/reader/full/embedded-microcontroller 5/30
Pin 6: CEX2 (P1.5) - External I/O for PCA module 2
Pin 7: CEX3 (P1.6) - External I/O for PCA module 3
Pin 8: CEX4 (P1.7) - External I/O for PCA module 4
9: RST (Reset Signal): High logical state on this input halts the MCU and clears all the
registers. Bringing this pin back to logical state zero starts the program a new as if the power had
just been turned on. In another words, positive voltage impulse on this pin resets the MCU.
Depending on the device's purpose and environs, this pin is usually connected to the push-button,
reset-upon-start circuit or a brown out reset circuit.
10-17: P3.0 to P3.7 (Port 3): As with Port 1, each of these pins can be used as universal input or
output. However, each pin of Port 3 has an alternative function:
Pin 10: RxD(P3,0) - Serial input for asynchronous communication
Pin 11: TxD(P3.1) - Serial output for asynchronous communication
Pin 12: INT0(P3.2) - Input for interrupt 0
Pin 13: INT1(P3.3) - Input for interrupt 1
Pin 14: T0(P3.4) - Clock input of counter 0
Pin 15: T1(P3.5) - Clock input of counter 1
Pin 16: WR(P3.6) - Signal for writing to external RAM memory
Pin 17: RD(P3.7) - Signal for reading from external RAM memory
18-19: XTAL2 and XTAL1 (Crystal input and output): Input and output of internal oscillator.
Quartz crystal controlling the frequency commonly connects to these pins.
20: VSS: Ground
21- 28: P2.0 to P2.7 (Port 2): If external memory is not present, pins of Port 2 act as universalinput/output. If external memory is connected, this is the location of the higher address byte, i.e.
addresses A8 – A15. It is important to note that in cases when not all the 8 bits are used for
addressing the memory (i.e. memory is smaller than 64kB), the rest of the unused bits are not
available as input/output.

7/30/2019 Embedded Microcontroller
http://slidepdf.com/reader/full/embedded-microcontroller 6/30
29: PSEN (Program Store Enable): MCU activates this bit (brings to low state) upon each
reading of byte instruction from program memory. If external ROM is used for storing the
program, PSEN is directly connected to its control pins.
30: ALE (Address Latch Enable): Before each reading of the external memory, MCU sends
the lower byte of the address register (addresses A0 – A7) to port P0 ,and activates the output
ALE. External Chip (eg: 74HC373), memorizes the state of port P0 upon receiving a signal from
ALE pin, and uses it as part of the address for memory chip. During the second part of the MCU
cycle, signal on ALE is off, and port P0 is used as Data Bus. In this way, by adding only one
integrated circuit, data from port can be multiplexed and the port simultaneously used for
transferring both addresses and data.
31: EA (External Access Enable): Bringing this pin to the logical state zero designates the
ports P2 and P3 for transferring addresses regardless of the presence of the internal memory.
This means that even if there is a program loaded in the MCU it will not be executed, but the one
from the external ROM will be used instead. Conversely, bringing the pin to the high logical
state causes the controller to use both memories, first the internal, and then the external (if
present).
32-39: P0.7 to P0.0 (Port 0): Similar to Port 2, pins of Port 0 can be used as universalinput/output, if external memory is not used. If external memory is used, P0 behaves as address
output (A0 – A7) when ALE pin is at high logical level, or as data output (Data Bus) when ALE
pin is at low logical level.
40: VCC: Power +5V
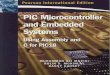
Architecture of 89C51 Microcontroller
The architecture of the 8051 family of microcontrollers (8051 derivatives) is referred to
as the MCS-51 architecture (Micro Controller Series – 51), or sometimes simply as MCS-51.
The block diagram of 89C51 microcontroller is shown below.

7/30/2019 Embedded Microcontroller
http://slidepdf.com/reader/full/embedded-microcontroller 7/30
Architecture of 89C51 microcontroller
ACCUMULATOR (ACC): Accumulator is a general-purpose register, which stores runtime
results. Before performing any operation upon an operand, operand has to be stored in the
accumulator. Results of arithmetical operations are also stored in the accumulator. When
transferring data from one register to another, it has to go through the accumulator. Due to its
versatile role, this is the most frequently used register, essential part of every MCU.

7/30/2019 Embedded Microcontroller
http://slidepdf.com/reader/full/embedded-microcontroller 8/30

7/30/2019 Embedded Microcontroller
http://slidepdf.com/reader/full/embedded-microcontroller 9/30
P1.0
P1.1
P1.2
P1.3
P1.4
P1.5
P1.6
P1.7
T2
T2EX
ECI
CEX0
CEX1
CEX2
CEX3
CEX4
Serial input
Serial output
External interrupt 0
External interrupt 1
Timer 0 external input
Timer 1 external input
Signal write to external memory
Signal read from external memory
Port 2 (P2): When using external memory, this port contains the higher address byte (addresses
A8 – A15), similar to Port 0. Otherwise, it can be used as universal I/O port.
Port 3 (P3): Beside its role as universal I/O port, each pin of Port 3 has an alternate function. In
order to use one of these functions, the pin in question has to be designated as input, i.e. the
appropriate bit of register P3 needs to be set. By selecting one of the functions the other one is
disabled. From a hardware standpoint, Port 3 is similar to Port 0. The alternate functions of Port
3 is given below
Pin Alternate Name Alternate Function
P3.0
P3.1
P3.2
P3.3
P3.4
P3.5
P3.6
P3.7
RXD
TXD
INT0
INT1
T0
T1
WR
RD
Serial input
Serial output
External interrupt 0
External interrupt 1
Timer 0 external input
Timer 1 external input
Signal write to external memory
Signal read from external memory
Data Pointer (DPTR) : The Data pointer register is made up of two 8 bit registers, named DPH
(Data Pointer High) and DPL (Data Pointer Low). These registers are used to give addresses of
the internal or external memory. The DPTR is under the control of program. DPTR is also

7/30/2019 Embedded Microcontroller
http://slidepdf.com/reader/full/embedded-microcontroller 10/30
manipulated as one 16 bit register, DPH & DPL are each assigned an address. The 89C51
microcontroller has additional DPTR. The dual DPTR structure is a way by which the chip will
specify the address of an external data memory location. There are two 16-bit DPTR registers
that address the external memory, and a single bit called DPS (bit0 in AUXR1) that allows the
program code to switch between them.
Stack Pointer (SP) : The stack refers to an area of internal RAM that is used in conjunction with
certain opcodes to store and retrieve data quickly. The register used to access the stack is called
Stack Pointer. The 8 bit stack pointer register is used by the 89C51 to hold an internal RAM
address that is called then top of the stack. The stack pointer increments before storing the data
on the stack. As retrieved from the stack the SP is decremented by one. The number in Stack
Pointer points to the location of the last "valid" address within the Stack. With the beginning of
every new routine, Stack Pointer increases by 1; upon return from routine, SP decreases by 1.
Upon reset (or turning the power on), the stack pointer contains the value 07h.
Program Counter (PC): Used to access code memory. Program counter always points to the
address of the next instruction in memory to be executed. Upon reset (or turning the power on),
the program counter resets to the starting location of the program.
Instruction Register: When an instruction is fetched from the Flash memory, it is loaded in the
instruction register.
Timing & Control unit: The timing and control unit synchronizes the operation of the
microcontroller and generates control signals necessary for communication between the
microcontroller and the peripherals.
Program Status Word (PSW): The Program Status Word (PSW) register is an 8 bit register. It
is also referred to as the flag register. It contains the math flags, user program flag F0, and the
register select bits that identify which of the four general purpose register banks is currently in
use by the program.
Oscillator: Oscillator circuit is used for providing a microcontroller with a clock. Clock is
needed so that microcontroller could execute a program or program instructions. Stable pace
provided by the oscillator allows harmonious and synchronous functioning of all other parts of
MCU. The manufacturers make available 89C51 designs that can run at specified maximum and
minimum frequencies, typically 1 megahertz to 33 megahertz. Minimum frequencies imply that

7/30/2019 Embedded Microcontroller
http://slidepdf.com/reader/full/embedded-microcontroller 11/30
some internal memories are dynamic and must always operate above a minimum frequency or
data will be lost.
Interrupts: An interrupt is a signal from a device attached to a computer or from a program
within the computer that causes the main program that operates the computer to stop and points
out what to do next. In general, there are hardware interrupts and software interrupts. A hardware
interrupt is related to the hardware of the system. For example, when an I/O operation is
completed such as reading some data into the computer from a keyboard interrupt the main
program. As the name implies the software interrupts related to the software of the system. It
occurs when an application program terminates or requests certain services from the operating
system.
Timers/Counters: Timers are usually the most complicated parts of a microcontroller.
Physically, timer is a register whose value is continually increasing to FFFFh, and then it starts
all over again: 0h, 1h, 2h, 3h, 4h...FFFFh....0h, 1h, 2h, 3h......etc. The 89C51 MCU clock
employs a quartz crystal. As this frequency is highly stable and accurate, it is ideal for time
measuring. Since one instruction takes 12 oscillator cycles to complete, the math is easy. 89C51
has three Timers/Counters marked as T0, T1 & T2. Their purpose is to measure time and count
external occurrences, but can also be used as clock in serial communication purpose called as,
Baud Rate.
Serial Port: Serial port is used to provide communication among two devices. Serial data
communication has been widely used for long distance communication because of the ease and
the economy of using only one wire to transmit data. Serial port is also referred as RS232 port.
RS232 is a asynchronous way of communication. Asynchronous transmission allows data to be
transmitted without the sender having to send a clock signal to the receiver. Instead, the sender
and receiver must agree on timing parameters in advance and special bits are added to each
word, which are used to synchronize the sending and receiving units.
When a word is given to the UART for Asynchronous transmissions, a bit called the
"Start Bit" is added to the beginning of each word that is to be transmitted. The Start Bit is used
to alert the receiver that a word of data is about to be sent, and to force the clock in the receiver
into synchronization with the clock in the transmitter.
TRANSMITTER USES AN INTERNAL CLOCK TO DETERMINE WHEN
TO SEND EACH BIT

7/30/2019 Embedded Microcontroller
http://slidepdf.com/reader/full/embedded-microcontroller 12/30
RECEIVER DETECTS THE FALLING EDGE OF START, THEN
USES ITS INTERNAL CLOCK TO READ THE FOLLOWING BITS
Data
(61h ) START BIT 0 BIT 7 STOP
BIT BIT
1 0 0 0 0 1 1 0
ASYNCHRONOUS TRANSMISSION SEND LSB FIRST
Asynchronous Transmission
Memory Organization:
RAM (Data Memory)
RAM is used for storing temporary data and auxiliary results generated during the
runtime. The P89C51RD2BN has internal data memory that is mapped into four separate
segments: the lower 128 bytes of RAM, upper 128 bytes of RAM, 128 bytes Special Function
Register (SFR), and 768 bytes expanded RAM (ERAM). The four segments are:
1. The Lower 128 bytes of RAM (addresses 00H to 7FH) are directly and indirectly
addressable.
2. The Upper 128 bytes of RAM (addresses 80H to FFH) are indirectly addressable
only.
3. The Special Function Registers, SFRs, (addresses 80H to FFH) are directly
addressable only.
4. The 768-bytes expanded RAM (ERAM, 00H – 2FFH) are indirectly accessed by
move external instruction, MOVX, and with the EXTRAM bit in the AUXR register
cleared.

7/30/2019 Embedded Microcontroller
http://slidepdf.com/reader/full/embedded-microcontroller 13/30
RAM Organization
The Lower 128 bytes can be accessed by either direct or indirect addressing. The Upper
128 bytes can be accessed by indirect addressing only. The Upper 128 bytes occupy the same
address space as the SFR. That means they have the same address, but are physically separate
from SFR space. The ERAM can be accessed by indirect addressing, with EXTRAM bit in the
AUXR register cleared and MOVX instructions. This part of memory is physically located on-
chip, logically occupies the first 7936-bytes of external data memory. With EXTRAM = 0, the
ERAM is indirectly addressed, using the MOVX instruction in combination with any of the
registers R0, R1 of the selected bank or DPTR. An access to ERAM will not affect portsP0, P3.6
(WR) and P3.7 (RD). P2 SFR is output during external addressing. The stack pointer (SP) may
be located anywhere in the 256 bytes RAM (lower and upper RAM) internal data memory. The
stack may not be located in the ERAM.

7/30/2019 Embedded Microcontroller
http://slidepdf.com/reader/full/embedded-microcontroller 14/30
Internal RAM Architecture
Flash Memory (Program Memory):
89C51 have built-in 64-kilo bytes of Flash memory. The P89C51RD2BN Flash memory
augments EPROM functionality with in-circuit electrical erasure and programming. The Flash
can be read and written as bytes. The Chip Erase operation will erase the entire program
memory. The Block Erase function can erase any Flash block. In-system programming and
standard parallel programming are both available. On-chip erase and write timing generation
contribute to a user-friendly programming interface. The P89C51RD2BN Flash reliably stores
memory contents even after 10,000 erase and program cycles. The cell is designed to optimize
the erase and programming mechanisms. In addition, the combination of advanced tunnel oxide
processing and low internal electric fields for erase and programming operations produces

7/30/2019 Embedded Microcontroller
http://slidepdf.com/reader/full/embedded-microcontroller 15/30
reliable cycling. The P89C51RD2BN uses a +5 V VPP supply to perform the Program/Erase
algorithms.
89C51 Program Memory
Special Function Registers:
Special Function Register (SFR) can be seen as a sort of control panel for managing and
monitoring the microcontroller. Every register and each of the belonging bits has its name,
specified address in RAM and strictly defined role (e.g. controlling the timer, interrupt, serial
communication, etc). Although there are 128 available memory slots for allocating SFR
registers. The rest has been left open intentionally to allow future upgrades while retaining thecompatibility with earlier models. This fact makes possible to use programs developed for
obsolete models long ago.
SYMBOL DESCRIPTION DIRECT ADDRESS
ACC Accumulator E0H

7/30/2019 Embedded Microcontroller
http://slidepdf.com/reader/full/embedded-microcontroller 16/30
AUXR
AUXR1
B
CCAP0H
CCAP1H
CCAP2H
CCAP3H
CCAP4H
CCAP0L
CCAP1L
CCAP2L
CCAP3L
CCAP4L
CCAPM0
CCAPM1
CCAPM2
CCAPM3
CCAPM4
CCONCH
CKCON
CL
CMOD
DPH
DPL
IE
IP
IPH
P0
P1
P2
Auxiliary
Auxiliary 1
B register
Module 0 Capture High
Module 1 Capture High
Module 2 Capture High
Module 3 Capture High
Module 4 Capture High
Module 0 Capture Low
Module 1 Capture Low
Module 2 Capture Low
Module 3 Capture Low
Module 4 Capture Low
Module 0 Mode
Module 1 Mode
Module 2 Mode
Module 3 Mode
Module 4 Mode
PCA Counter ControlPCA Counter High
Clock control
PCA Counter Low
PCA Counter Mode
Data Pointer High
Data Pointer Low
Interrupt Enable 0
Interrupt Priority
Interrupt Priority High
Port 0
Port 1
Port 2
8EH
A2H
F0H
FAH
FBH
FCH
FDH
FEH
EAH
EBH
ECH
EDH
EEH
DAH
DBH
DCH
DDH
DEH
D8HF9H
8FH
E9H
D9H
83H
82H
A8H
B8H
B7H
80H
90H
A0H

7/30/2019 Embedded Microcontroller
http://slidepdf.com/reader/full/embedded-microcontroller 17/30
P3
PCON
PSW
RCAP2H
RCAP2L
SADDR
SADEN
SBUF
SCON
SP
TCON
T2CON
T2MOD
TH0
TH1
TH2
TL0
TL1
TL2TMOD
WDTRST
Port 3
Power Control
Program Status Word
Timer 2 Capture High
Timer 2 Capture Low
Slave Address
Slave Address Mask
Serial Data Buffer
Serial Control
Stack Pointer
Timer Control
Timer 2 Control
Timer 2 Mode Control
Timer High 0
Timer High 1
Timer High 2
Timer Low 0
Timer Low 1
Timer Low 2Timer Mode
Watchdog Timer Reset
B0H
87H
D0H
CBH
CAH
A9H
B9H
99H
98H
81H
88H
C8H
C9H
8CH
8DH
CDH
8AH
8BH
CCH89H
A6H
Addressing Modes and Instruction Set
The CPU can access data in various ways. The data could be in a register, or in memory,
or to be provided as an immediate value. These various ways of accessing data are called

7/30/2019 Embedded Microcontroller
http://slidepdf.com/reader/full/embedded-microcontroller 18/30
addressing modes. The various addressing modes are determined when it is designed and
therefore cannot be changed by the programmer. The 89C51 provide a total of five distinct
addressing modes. They are:
Immediate Addressing: Immediate addressing is so-named because the value to be stored in
memory immediately follows the operation code in memory.
Example: MOV A, #20H
Direct Addressing: In Direct addressing the value to be stored in memory is obtained by
directly retrieving it from another memory location.
Example: MOV A, 30H
Register Addressing: Register addressing accesses the eight working registers (R0 - R7) of the
selected register bank.
Example: MOV A, R0
Register indirect Addressing: Register indirect addressing is a very powerful addressing mode,
which in many cases provides an exceptional level of flexibility. Indirect addressing is also the
only way to access the extra 128 bytes of Internal RAM.
Example: MOV A, @R0
Indexed Addressing: Indexed addressing mode is widely used in accessing data elements of
look-up table entries located in the program ROM space of the 89C51.
Example: MOVC A, @A+DPTR, MOVC A, @A+PC
The 89C51 instruction set includes 111 instructions, 49 of which are single-byte, 45 two-
byte and 17 three-byte instructions. The instruction set is divided into four functional groups:
Data transfer - None of the data transfer operations affects the PSW flag settings
except a POP or MOV directly to the PSW.
Arithmetic - The 89C51 microcontrollers have four basic mathematical operations.
Only 8-bit operations using unsigned arithmetic are supported directly.

7/30/2019 Embedded Microcontroller
http://slidepdf.com/reader/full/embedded-microcontroller 19/30
Logic - The 89C51 perform logic operations on both bit and byte operands
Control transfer - All control transfer operations, some upon a specific condition,
cause the program execution to continue a non-sequential location in program
memory.
Data Transfer Instructions:
Mnemonic Description Byte Cycle Op-
code

7/30/2019 Embedded Microcontroller
http://slidepdf.com/reader/full/embedded-microcontroller 20/30
MOV A, R0 Move Register R0 to Accumulator 1 1 E8
MOV A, R1 Move Register R1 to Accumulator 1 1 E9
MOV A, R2 Move Register R2 to Accumulator 1 1 EA
MOV A, R3 Move Register R3 to Accumulator 1 1 EB
MOV A, R4 Move Register R4 to Accumulator 1 1 EC
MOV A, R5 Move Register R5 to Accumulator 1 1 EDMOV A, R6 Move Register R6 to Accumulator 1 1 EE
MOV A, R7 Move Register R7 to Accumulator 1 1 EF
MOV A, direct Move direct byte to A 2 1 E5
MOV A, @R0 Move indirect RAM to A 1 1 E6
MOV A, @R1 Move indirect RAM to A 1 1 E7
MOV A, #data Move immediate data to A 2 1 74
MOV R0, A Move Accumulator to Register R0 1 1 F8
MOV R1, A Move Accumulator to Register R1 1 1 F9
MOV R2, A Move Accumulator to Register R2 1 1 FA
MOV R3, A Move Accumulator to Register R3 1 1 FB
MOV R4, A Move Accumulator to Register R4 1 1 FCMOV R5, A Move Accumulator to Register R5 1 1 FD
MOV R6, A Move Accumulator to Register R6 1 1 FE
MOV R7, A Move Accumulator to Register R7 1 1 FF
MOV R0, direct Move direct byte to Register R0 2 2 A8
MOV R1, direct Move direct byte to Register R1 2 2 A9
MOV R2, direct Move direct byte to Register R2 2 2 AA
MOV R3, direct Move direct byte to Register R3 2 2 AB
MOV R4, direct Move direct byte to Register R4 2 2 AC
MOV R5, direct Move direct byte to Register R5 2 2 AD
MOV R6, direct Move direct byte to Register R6 2 2 AE
MOV R7, direct Move direct byte to Register R7 2 2 AF
MOV R0, #data Move immediate data to Register
R0
2 1 78
MOV R1, #data Move immediate data to Register
R1
2 1 79
MOV R2, #data Move immediate data to Register
R2
2 1 7A
MOV R3, #data Move immediate data to Register
R3
2 1 7B
MOV R4, #data Move immediate data to Register
R4
2 1 7C

7/30/2019 Embedded Microcontroller
http://slidepdf.com/reader/full/embedded-microcontroller 21/30
MOV R5, #data Move immediate data to Register
R5
2 1 7D
MOV R6, #data Move immediate data to Register
R6
2 1 7E
MOV R7, #data Move immediate data to Register
R7
2 1 7F
MOV direct, A Move Accumulator to direct byte 2 1 F5
MOV direct, R0 Move Register R0 to direct byte 2 2 88
MOV direct, R1 Move Register R1 to direct byte 2 2 89
MOV direct, R2 Move Register R2 to direct byte 2 2 8A
MOV direct, R3 Move Register R3 to direct byte 2 2 8B
MOV direct, R4 Move Register R4 to direct byte 2 2 8C
MOV direct, R5 Move Register R5 to direct byte 2 2 8D
MOV direct, R6 Move Register R6 to direct byte 2 2 8E
MOV direct, R7 Move Register R7 to direct byte 2 2 8F
MOV direct, direct Move direct byte to direct byte 3 2 85
MOV direct, @R0 Move indirect RAM to direct byte 2 2 86MOV direct, @R1 Move indirect RAM to direct byte 2 2 87
MOV direct, #data Move immediate data to direct
byte
3 2 75
MOV @R0, A Move A to indirect RAM 1 1 F6
MOV @R1, A Move A to indirect RAM 1 1 F7
MOV @R0, direct Move direct byte to indirect RAM 2 2 A6
MOV @R1, direct Move direct byte to indirect RAM 2 2 A7
MOV @R0, #data Move immediate data to indirect
RAM
2 1 76
MOV @R1, #data Move immediate data to indirect
RAM
2 1 77
MOV DPTR, #da16 Load data pointer with 16-bit 3 2 90
MOVC A, @A+DPTR Move code byte related to Data
pointer to Accumulator
1 2 93
MOVC A, @A+PC Move code byte related to PC to A 1 2 83
MOVX A, @R0 Move External RAM (8-bit) to A 1 2 E2
MOVX A, @R1 Move External RAM (8-bit) to A 1 2 E3
MOVX A, @DPTR Move External RAM (16-bit) to A 1 2 E0
MOVX @R0, A Move A to External RAM (8-bit) 1 2 F2
MOVX @R1, A Move A to External RAM (8-bit) 1 2 F3
MOVX @DPTR, A Move A to External RAM (16-bit) 1 2 F0PUSH direct Push direct byte onto stack 2 2 C0
POP direct Pop direct byte from stack 2 2 D0
XCH A, R0 Exchange Register R0 with A 1 1 C8
XCH A, R1 Exchange Register R1 with A 1 1 C9
XCH A, R2 Exchange Register R2 with A 1 1 CA
XCH A, R3 Exchange Register R3 with A 1 1 CB
XCH A, R4 Exchange Register R4 with A 1 1 CC

7/30/2019 Embedded Microcontroller
http://slidepdf.com/reader/full/embedded-microcontroller 22/30

7/30/2019 Embedded Microcontroller
http://slidepdf.com/reader/full/embedded-microcontroller 23/30
SUBB A, R1 Subtract Register R1 from A with
borrow
1 1 99
SUBB A, R2 Subtract Register R2 from A with
borrow
1 1 9A
SUBB A, R3 Subtract Register R3 from A with
borrow
1 1 9B
SUBB A, R4 Subtract Register R4 from A with
borrow
1 1 9C
SUBB A, R5 Subtract Register R5 from A with
borrow
1 1 9D
SUBB A, R6 Subtract Register R6 from A with
borrow
1 1 9E
SUBB A, R7 Subtract Register R7 from A with
borrow
1 1 9F
SUBB A, direct Subtract direct byte from A with borrow
2 1 95
SUBB A, @R0 Subtract indirect RAM from A with
borrow
1 1 96
SUBB A, @R1 Subtract indirect RAM from A with borrow
1 1 97
SUBB A, #data Subtract immediate data from A with borrow
2 1 94
INC A Increment Accumulator 1 1 04
INC R0 Increment Register R0 1 1 08
INC R1 Increment Register R1 1 1 09
INC R2 Increment Register R2 1 1 0AINC R3 Increment Register R3 1 1 0B
INC R4 Increment Register R4 1 1 0C
INC R5 Increment Register R5 1 1 0D
INC R6 Increment Register R6 1 1 0E
INC R7 Increment Register R7 1 1 0F
INC direct Increment direct byte 2 1 05
INC @R0 Increment indirect RAM 1 1 06
INC @R1 Increment indirect RAM 1 1 07
DEC A Decrement Accumulator 1 1 14
DEC R0 Decrement Register R0 1 1 18
DEC R1 Decrement Register R1 1 1 19
DEC R2 Decrement Register R2 1 1 1A
DEC R3 Decrement Register R3 1 1 1B
DEC R4 Decrement Register R4 1 1 1C
DEC R5 Decrement Register R5 1 1 1D
DEC R6 Decrement Register R6 1 1 1E
DEC R7 Decrement Register R7 1 1 1F

7/30/2019 Embedded Microcontroller
http://slidepdf.com/reader/full/embedded-microcontroller 24/30
DEC direct Decrement direct byte 2 1 15
DEC @R0 Decrement indirect RAM 1 1 16
DEC @R1 Decrement indirect RAM 1 1 17
INC DPTR Increment data pointer 1 2 A3
MUL AB Multiply A and B and put the lower-
byte of the product in A and thehigher-byte in B.
1 4 A4
DIV AB Divide A by B and put the Quotient in
A and the Remainder in B
1 4 84
DA A Adjust the sum of two packed
numbers found in A
1 1 D4
Logical Instructions:
Mnemonic Description Byte Cycle Opcode
ANL A, R0 AND Register R0 to Accumulator 1 1 58ANL A, R1 AND Register R1 to Accumulator 1 1 59
ANL A, R2 AND Register R2 to Accumulator 1 1 5A
ANL A, R3 AND Register R3 to Accumulator 1 1 5B
ANL A, R4 AND Register R4 to Accumulator 1 1 5C
ANL A, R5 AND Register R5 to Accumulator 1 1 5D
ANL A, R6 AND Register R6 to Accumulator 1 1 5E
ANL A, R7 AND Register R7 to Accumulator 1 1 5F
ANL A, direct AND direct byte to A and put theresult in A
2 1 55
ANL A, @R0 AND indirect RAM to A 1 1 56
ANL A, @R1 AND indirect RAM to A 1 1 57ANL A, #data AND immediate data to A 2 1 54
ANL direct, A AND Accumulator to direct byte and
put the result in memory
2 1 52
ANL direct, #data AND immediate data to direct byte 3 2 53
ORL A, R0 OR Register R0 to Accumulator 1 1 48
ORL A, R1 OR Register R1 to Accumulator 1 1 49
ORL A, R2 OR Register R2 to Accumulator 1 1 4A
ORL A, R3 OR Register R3 to Accumulator 1 1 4B
ORL A, R4 OR Register R4 to Accumulator 1 1 4C
ORL A, R5 OR Register R5 to Accumulator 1 1 4D
ORL A, R6 OR Register R6 to Accumulator 1 1 4E
ORL A, R7 OR Register R7 to Accumulator 1 1 4F
ORL A, direct OR direct byte to A and put the result
in A
2 1 45
ORL A, @R0 OR indirect RAM to A 1 1 46
ORL A, @R1 OR indirect RAM to A 1 1 47
ORL A, #data OR immediate data to A 2 1 44

7/30/2019 Embedded Microcontroller
http://slidepdf.com/reader/full/embedded-microcontroller 25/30
ORL direct, A OR Accumulator to direct byte and
put the result in memory
2 1 42
ORL direct, #data OR immediate data to direct byte 3 2 43
XRL A, R0 Exclusive OR Register R0 to A 1 1 68
XRL A, R1 Exclusive OR Register R1 to A 1 1 69
XRL A, R2 Exclusive OR Register R2 to A 1 1 6AXRL A, R3 Exclusive OR Register R3 to A 1 1 6B
XRL A, R4 Exclusive OR Register R4 to A 1 1 6C
XRL A, R5 Exclusive OR Register R5 to A 1 1 6D
XRL A, R6 Exclusive OR Register R6 to A 1 1 6E
XRL A, R7 Exclusive OR Register R7 to A 1 1 6F
XRL A, direct Ex - OR direct byte to A 2 1 65
XRL A, @R0 Exclusive OR indirect RAM to A 1 1 66
XRL A, @R1 Exclusive OR indirect RAM to A 1 1 67
XRL A, #data Exclusive OR immediate data to A 2 1 64
XRL direct, A Exclusive OR Accumulator to direct
byte and put the result in memory
2 1 62
XRL direct, #data Ex - OR immediate data to direct byte 3 2 63
CLR A Clear Accumulator 1 1 E4
CPL A Complement Accumulator 1 1 F4
RL A Rotate Accumulator Left 1 1 23
RLC A Rotate Accumulator left through carry 1 1 33
RR A Rotate Accumulator Right 1 1 03
RRC A Rotate Accumulator Right through
carry
1 1 13
SWAP A Swap the nibbles of Accumulator 1 1 C4
Boolean Variable Manipulation Instructions:
Mnemonic Description Byte Cycle Opcode
CLR C Clear carry flag 1 1 C3
CLR bit Clear direct bit 2 1 C2
SETB C Set carry flag 1 1 D3
SETB bit Set direct bit 2 1 D2
CPL C Complement carry flag 1 1 B3
CPL bit Complement direct bit 2 1 B2
ANL C, bit AND direct bit to carry flag 2 2 82ANL C, /bit AND complement of direct bit to carry 2 2 B0
ORL C, bit OR direct bit to carry flag 2 2 72
ORL C, /bit OR complement of direct bit to carry 2 2 A0
MOV C, bit Move direct bit to carry flag 2 1 A2
MOV bit, C Move carry flag to direct bit 2 2 92

7/30/2019 Embedded Microcontroller
http://slidepdf.com/reader/full/embedded-microcontroller 26/30
Program and Machine Control Instructions:
Mnemonic Description Byte Cycle Op-
code
ACALL addr11 Absolute Subroutine call (If thecalling Address is within FFh)
2 2 11
ACALL addr11 Calling Address is within 1FFh 2 2 31ACALL addr11 Calling Address is within 2FFh 2 2 51
ACALL addr11 Calling Address is within 3FFh 2 2 71
ACALL addr11 Calling Address is within 4FFh 2 2 91
ACALL addr11 Calling Address is within 5FFh 2 2 B1
ACALL addr11 Calling Address is within 6FFh 2 2 D1
ACALL addr11 Calling Address is within 7FFh 2 2 F1
LCALL addr16 Long Subroutine call 3 2 12
RET Return from Subroutine 1 2 22
RETI Return from Interrupt 1 2 32
AJMP addr11 Absolute jump (If the jumping
Address is within 0FFh)
2 2 01
AJMP addr11 Absolute jump (If the jumpingAddress is within 0FFh)
2 2 21
AJMP addr11 Absolute jump (If the jumpingAddress is within 1FFh)
2 2 41
AJMP addr11 Absolute jump (If the jumpingAddress is within 2FFh)
2 2 61
AJMP addr11 Absolute jump (If the jumping
Address is within 3FFh)
2 2 81
AJMP addr11 Absolute jump (If the jumping
Address is within 4FFh)
2 2 A1
AJMP addr11 Absolute jump (If the jumpingAddress is within 5FFh)
2 2 C1
AJMP addr11 Absolute jump (If the jumping
Address is within 6FFh)
2 2 E1
LJMP addr16 Long jump 3 2 02
SJMP rel Short jump to relative address 2 2 80
JMP @A+DPTR Jump indirect relative to DPTR 1 2 73
JZ rel Jump if Accumulator is zero 2 2 60
JNZ rel Jump if Accumulator is not zero 2 2 70
JC rel Jump if carry flag is set 2 2 40
JNC rel Jump if carry flag is reset 2 2 50
JB bit, rel Jump if direct bit is set 3 2 20
JNB bit, rel Jump if direct bit is not set 3 2 30
JBC bit, rel Jump if direct bit is set and clear
bit
3 2 10
CJNE A, direct, rel Compare direct byte to A and
jump if not equal
3 2 B5

7/30/2019 Embedded Microcontroller
http://slidepdf.com/reader/full/embedded-microcontroller 27/30
CJNE A, #data, rel Compare immediate data to A and jump if not equal
3 2 B4
CJNE R0, #data, rel Compare immediate data toRegister R0 and jump if not equal
3 2 B8
CJNE R1, #data, rel Compare immediate data toRegister R1 and jump if not equal
3 2 B9
CJNE R2, #data, rel Compare immediate data to
Register R2 and jump if not equal
3 2 BA
CJNE R3, #data, rel Compare immediate data to
Register R3 and jump if not equal
3 2 BB
CJNE R4, #data, rel Compare immediate data to
Register R4 and jump if not equal
3 2 BC
CJNE R5, #data, rel Compare immediate data to
Register R5 and jump if not equal
3 2 BD
CJNE R6, #data, rel Compare immediate data to
Register R6 and jump if not equal
3 2 BE
CJNE R7, #data, rel Compare immediate data to
Register R7 and jump if not equal
3 2 BF
CJNE @R0, #data, rel Compare immediate data to RAM
and jump if not equal
3 2 B6
CJNE @R1, #data, rel Compare immediate data to RAM
and jump if not equal
3 2 B7
DJNZ R0, rel Decrement Register R0 and jump
if not zero
2 2 D8
DJNZ R1, rel Decrement Register R1 and jump
if not zero
2 2 D9
DJNZ R2, rel Decrement Register R2 and jumpif not zero
2 2 DA
DJNZ R3, rel Decrement Register R3 and jumpif not zero
2 2 DB
DJNZ R4, rel Decrement Register R4 and jumpif not zero
2 2 DC
DJNZ R5, rel Decrement Register R5 and jumpif not zero
2 2 DD
DJNZ R6, rel Decrement Register R6 and jump
if not zero
2 2 DE
DJNZ R7, rel Decrement Register R7 and jump
if not zero
2 2 DF
DJNZ direct, rel Decrement direct byte and jump if not zero
3 2 D5
NOP No Operation 1 1 00

7/30/2019 Embedded Microcontroller
http://slidepdf.com/reader/full/embedded-microcontroller 28/30
Liquid Crystal Display (LCD)
Liquid crystals are a phase of matter whose order is intermediate between that of a liquid
and that of a crystal. The molecules are typically rod-shaped organic matters about 25 Angstroms
in length and their ordering is a function of temperature. The molecular orientation can be
controlled with applied electric fields. LCD is made up of two sheets of polarizing material with
the liquid crystal solution between them. An electric current passed through the liquid causes the
crystals to align so that light cannot pass through them, which results in display of character as
per the applied voltage in its data lines. The driver is provided to drive the LCD. It stores the
display data transferred from the microcontroller in the internal display RAM and generates dot
matrix liquid crystal driving signals. Each bit data of display RAM corresponds to on/off state of
a dot of a liquid crystal display.
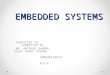
LCD pin description
LCD is used in widespread applications replacing LEDs (Seven segment LEDs or other
multisegment LEDs) nowadays. This is due to the following reasons:
1. The declining prices of LCDs.
2. The ability to display numbers, characters, and graphics. This is in contrast to LEDs,
which are limited to numbers and a few characters.

7/30/2019 Embedded Microcontroller
http://slidepdf.com/reader/full/embedded-microcontroller 29/30
3. Incorporation of a refreshing controller into the LCD, thereby relieving the CPU of
the task of refreshing the LCD.
4. Ease of programming for characters and graphics.
Pin Description:
Pin Symbol I/O Description
1 GND -- Ground
2 VCC -- +5V Power Supply
3 V0 -- LCD driving voltage
4 RS I RS = 0 to select command register
RS = 1 to select data register
5 RW I RW = 0 for write
RW = 1 for read
6 EN I Enable
7-14 D0-D7 I / O The 8-bit Data Bus
15 VCC -- +5V Power Supply
16 GND -- Ground
VCC, GND AND V0: While VCC and VSS provide +5V and ground, respectively, V0 is used
for controlling LCD contrast.
RS (Register Select): If RS = 0, the instruction command code register is selected, allowing
the user to send a command such as clear display, cursor at home, etc. If RS = 1, the data
register is selected, allowing the user to send data to be displayed on the LCD.
RW (Read/Write): RW allows the user to write information to the LCD or read information
from it. R W=1 when reading; RW=0 when writing.
EN (Enable): The LCD to latch information presented to its data pins uses the enable pin. When
data is supplied to data pins, a high to low pulse must be applied to this pin in order for the LCD
to latch in the data present at the data pins.

7/30/2019 Embedded Microcontroller
http://slidepdf.com/reader/full/embedded-microcontroller 30/30