Embed Size (px)
Citation preview
Enabling Dependable Communication in Cyber-Physical Systems with a
Wireless Bus
Federico Ferrari
PhD DefenseOctober 18, 2013 — Zurich, Switzerland
Computer Engineeringand Networks Laboratory
Enabling Dependable Communication in Cyber-Physical Systems with a Wireless Bus 2
Cyber-Physical Systems (CPSs)
• Tightly integrate physical processes, computation, and communication
• Safety-critical control loops– Sensors gather data from the environment– Actuators react according to a control law
October 18, 2013
Physical processes
ComputationCommunication
Enabling Dependable Communication in Cyber-Physical Systems with a Wireless Bus 3
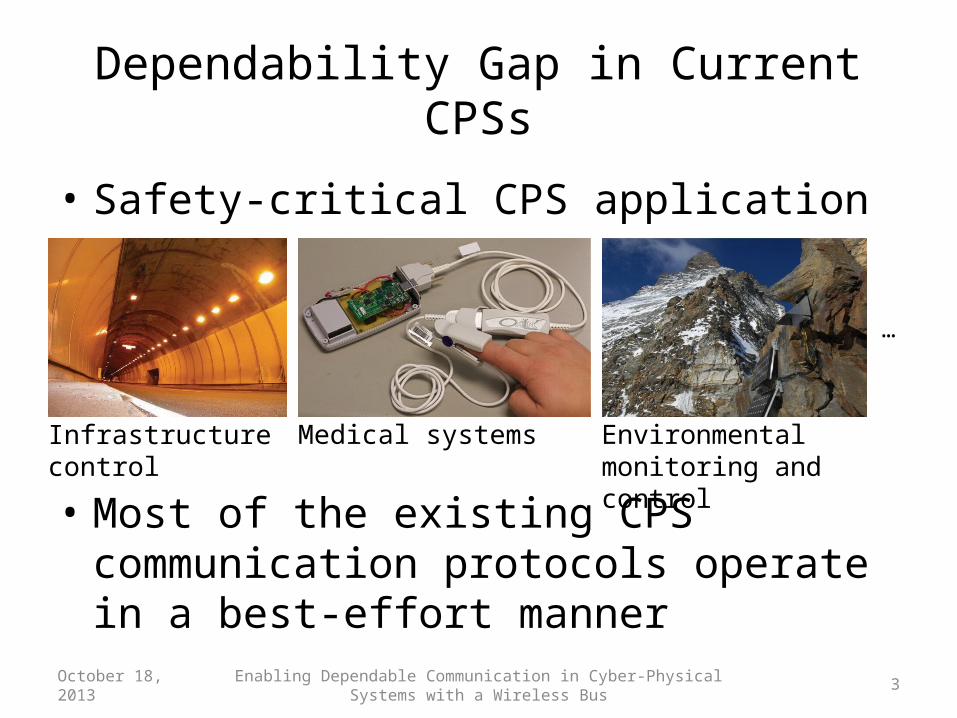
• Safety-critical CPS application
• Most of the existing CPS communication protocols operate in a best-effort manner
Infrastructure control Medical systems Environmental monitoring and control
…
Dependability Gap in Current CPSs
October 18, 2013

Enabling Dependable Communication in Cyber-Physical Systems with a Wireless Bus 4October 18, 2013
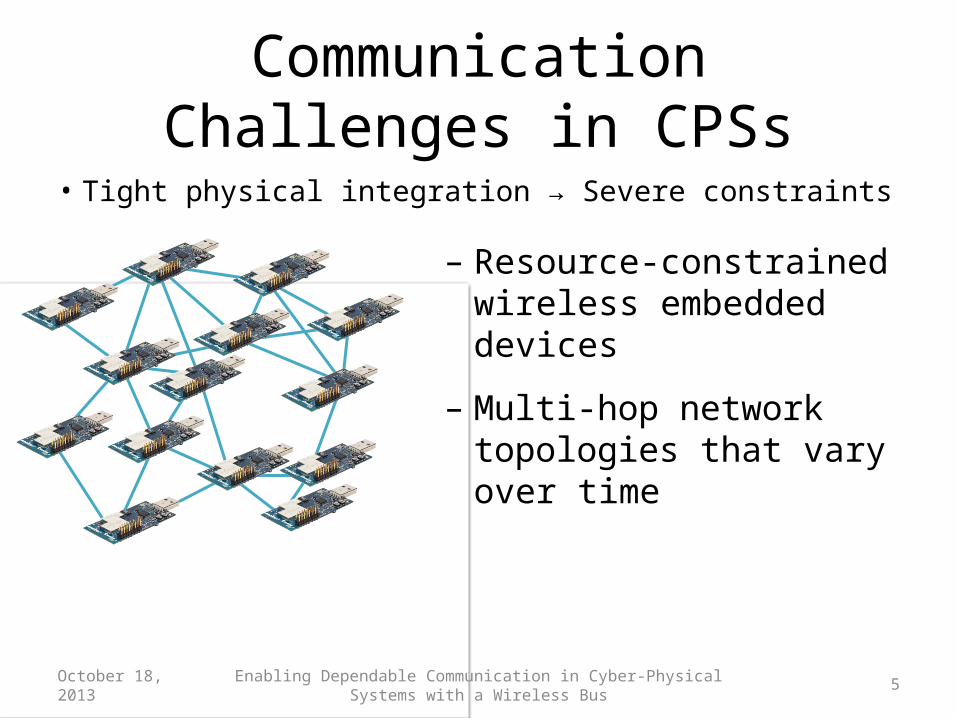
– Resource-constrainedwireless embedded devices
Communication Challenges in CPSs
[Tmote Sky]
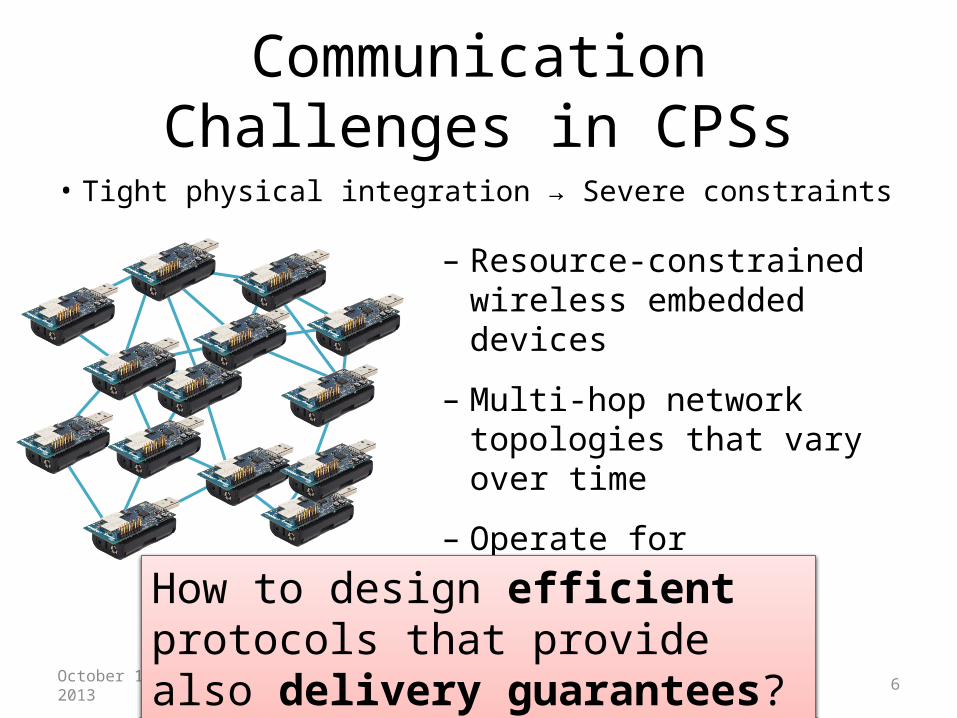
• Tight physical integration → Severe constraints
Enabling Dependable Communication in Cyber-Physical Systems with a Wireless Bus 5October 18, 2013
– Resource-constrainedwireless embedded devices
– Multi-hop network topologies that vary over time
Communication Challenges in CPSs
• Tight physical integration → Severe constraints
Enabling Dependable Communication in Cyber-Physical Systems with a Wireless Bus 6October 18, 2013
– Resource-constrainedwireless embedded devices
– Multi-hop network topologies that vary over time
– Operate for consecutive months/years
Communication Challenges in CPSs
• Tight physical integration → Severe constraints
How to design efficient protocols that provide also delivery guarantees?
Enabling Dependable Communication in Cyber-Physical Systems with a Wireless Bus 7
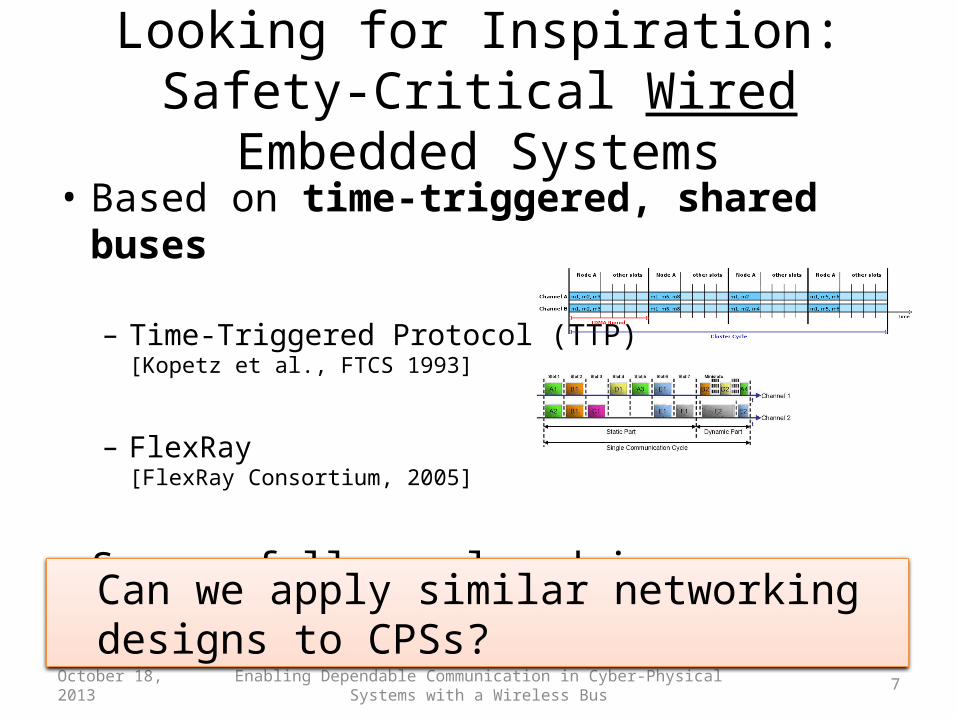
Looking for Inspiration:Safety-Critical Wired Embedded Systems• Based on time-triggered, shared buses
– Time-Triggered Protocol (TTP)[Kopetz et al., FTCS 1993]
– FlexRay[FlexRay Consortium, 2005]
• Successfully employed in automotive, avionics
October 18, 2013
Can we apply similar networking designs to CPSs?
Enabling Dependable Communication in Cyber-Physical Systems with a Wireless Bus 8
Our Wireless Bus Conjecture
• A time-triggered communication infrastructure for multi-hop low-power wireless networks– Common notion of time– Communicate as if connected by a shared bus
October 18, 2013
It is possible to enable dependable yet efficient communication in CPSs by employing a wireless bus
Enabling Dependable Communication in Cyber-Physical Systems with a Wireless Bus 9
Multi-hop low-power wireless network
October 18, 2013
Building a Wireless BusD
epen
dabi
lity
gap
Safety-critical CPS application
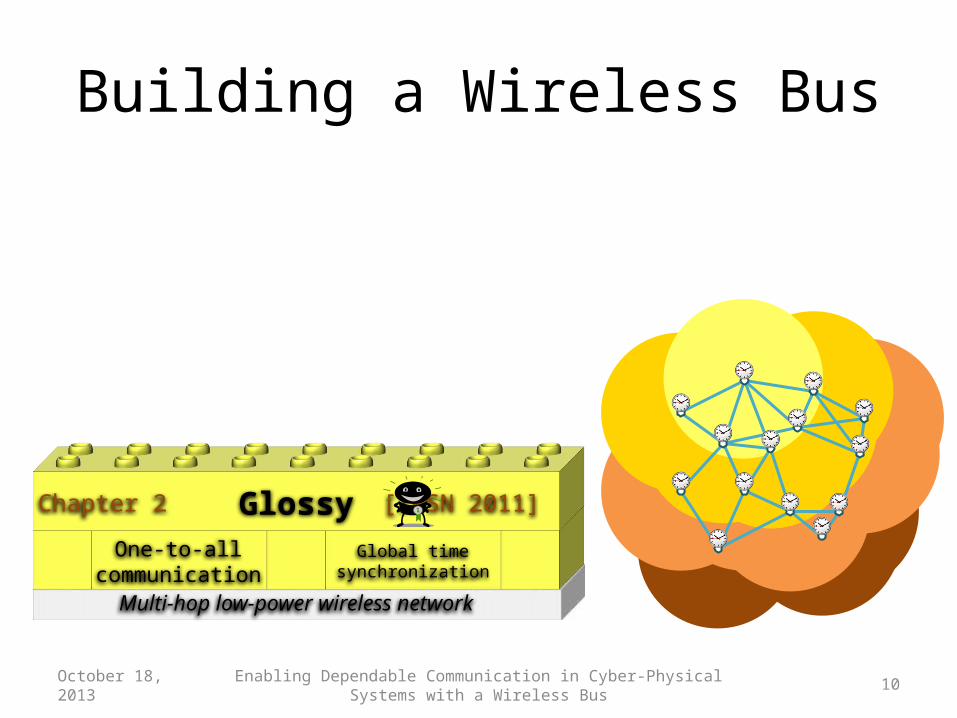
Enabling Dependable Communication in Cyber-Physical Systems with a Wireless Bus 10
Multi-hop low-power wireless network
One-to-all communication
Global time synchronization
GlossyChapter 2 [IPSN 2011]
Building a Wireless Bus
October 18, 2013
Enabling Dependable Communication in Cyber-Physical Systems with a Wireless Bus 11
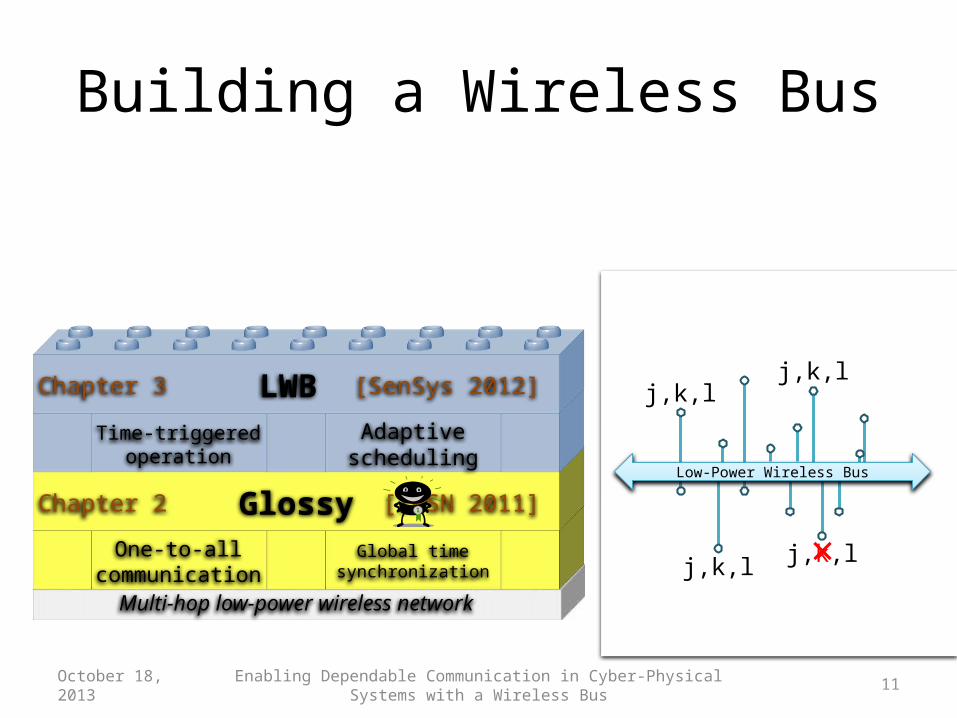
Low-Power Wireless Bus
j,k,lj,k,l
j,k,l j,k,l×Multi-hop low-power wireless network
One-to-all communication
Global time synchronization
GlossyChapter 2 [IPSN 2011]
Time-triggered operation
Adaptive scheduling
LWB Chapter 3 [SenSys 2012]
Building a Wireless Bus
October 18, 2013
Enabling Dependable Communication in Cyber-Physical Systems with a Wireless Bus 12
j,k,l
Low-Power Wireless Bus
j,k,lj,k,l
j,k,l ×j,k,l
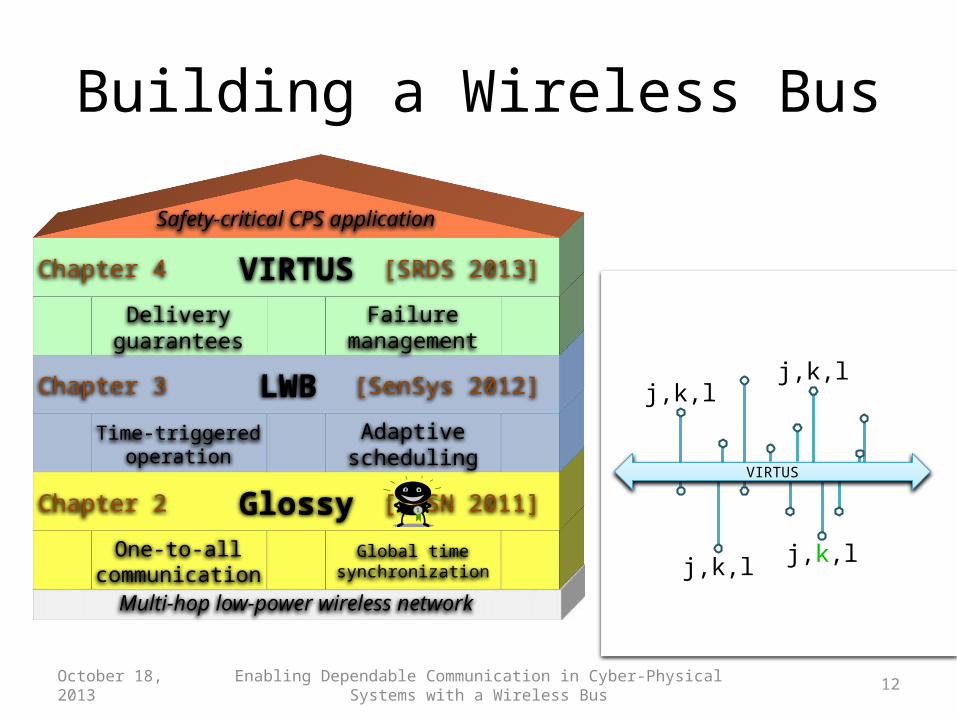
VIRTUS
j,k,lj,k,l
j,k,lMulti-hop low-power wireless network
One-to-all communication
Global time synchronization
GlossyChapter 2 [IPSN 2011]
Time-triggered operation
Adaptive scheduling
LWB Chapter 3 [SenSys 2012]
Delivery guarantees
Failure management
VIRTUSChapter 4 [SRDS 2013]
Building a Wireless Bus
October 18, 2013
Safety-critical CPS application
Enabling Dependable Communication in Cyber-Physical Systems with a Wireless Bus 13
Multi-hop low-power wireless network
One-to-all communication
Global time synchronization
GlossyChapter 2 [IPSN 2011]
Time-triggered operation
Adaptive scheduling
LWB Chapter 3 [SenSys 2012]
Delivery guarantees
Failure management
VIRTUSChapter 4 [SRDS 2013]
Safety-critical CPS application• Fast and reliable flooding of messages
• Accurate global time synchronization
• Hide complexity of multi-hop networks
October 18, 2013
Glossy: Objectives
Enabling Dependable Communication in Cyber-Physical Systems with a Wireless Bus 14
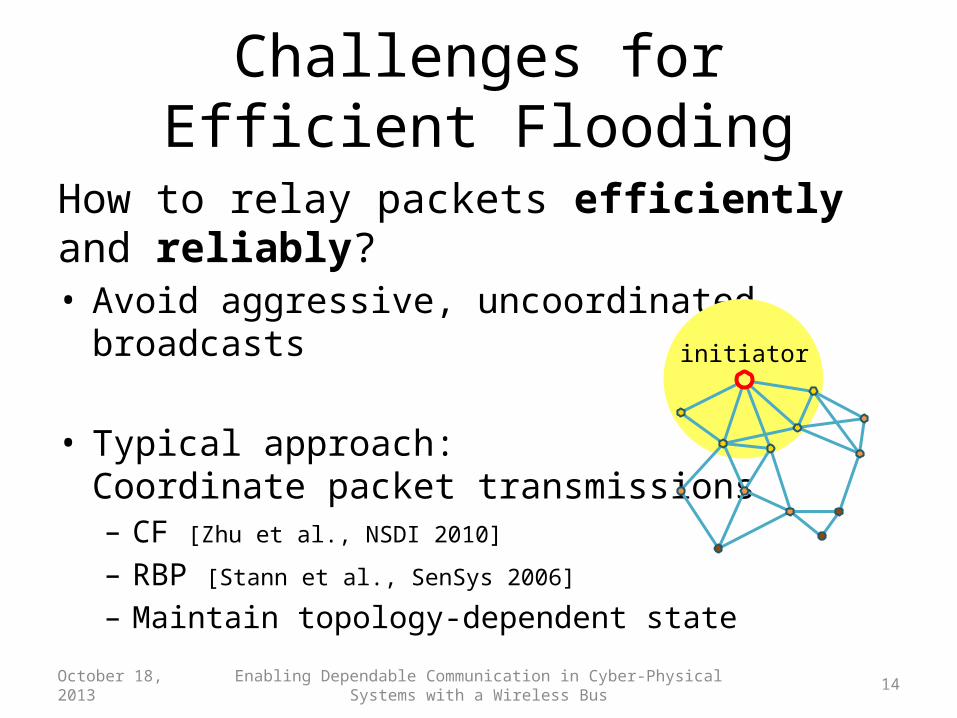
Challenges for Efficient Flooding
How to relay packets efficiently and reliably?• Avoid aggressive, uncoordinated broadcasts
• Typical approach:Coordinate packet transmissions– CF [Zhu et al., NSDI 2010]
– RBP [Stann et al., SenSys 2006]
– Maintain topology-dependent state
October 18, 2013
initiator
Enabling Dependable Communication in Cyber-Physical Systems with a Wireless Bus 15
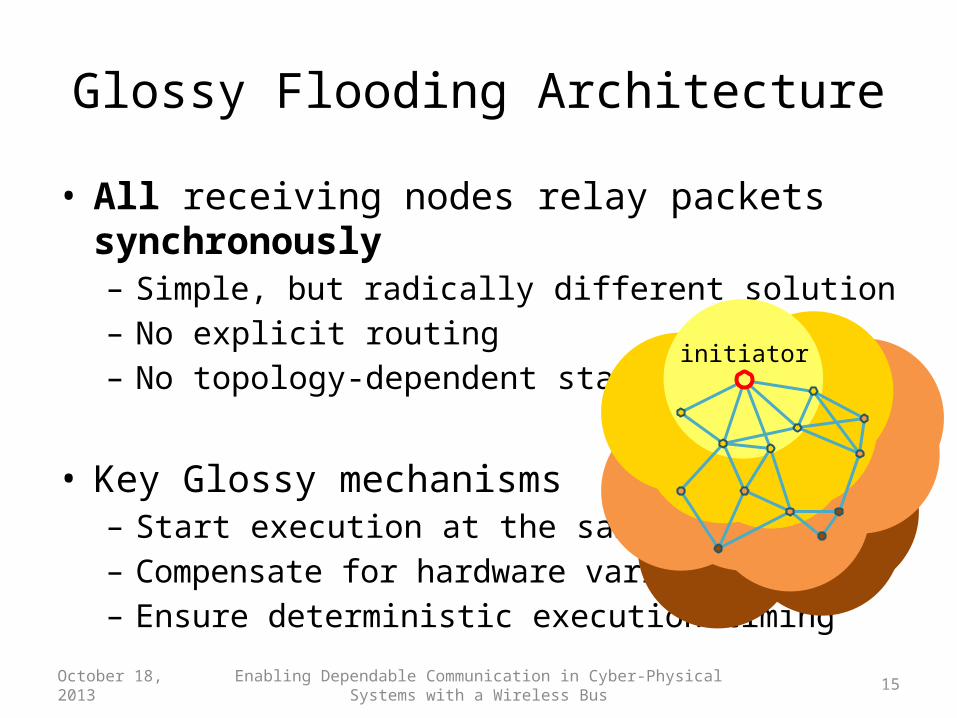
Glossy Flooding Architecture
• All receiving nodes relay packets synchronously– Simple, but radically different solution– No explicit routing– No topology-dependent state
• Key Glossy mechanisms– Start execution at the same time– Compensate for hardware variations– Ensure deterministic execution timing
October 18, 2013
initiator

Enabling Dependable Communication in Cyber-Physical Systems with a Wireless Bus 16
Propagation in Glossy
October 18, 2013
RxRxRx
Proc
.
Tx
Proc
.
TxProc
.
TxProc
.
Tx
Rx
RxRxRx
RxRxRx
TxProc
.Pr
oc.
TxProc
.
TxProc
.
Tx
RxRxRx
Proc
.
Tx Proc
.
Tx Proc
.
Tx
RxRxRx
Proc
.
Tx Proc
.
Tx Proc
.
Tx
Proc
.
Tx Proc
.
TxTx
RxRxRx
Proc
.
Proc
.
Tx Proc
.
Tx Proc
.
Tx
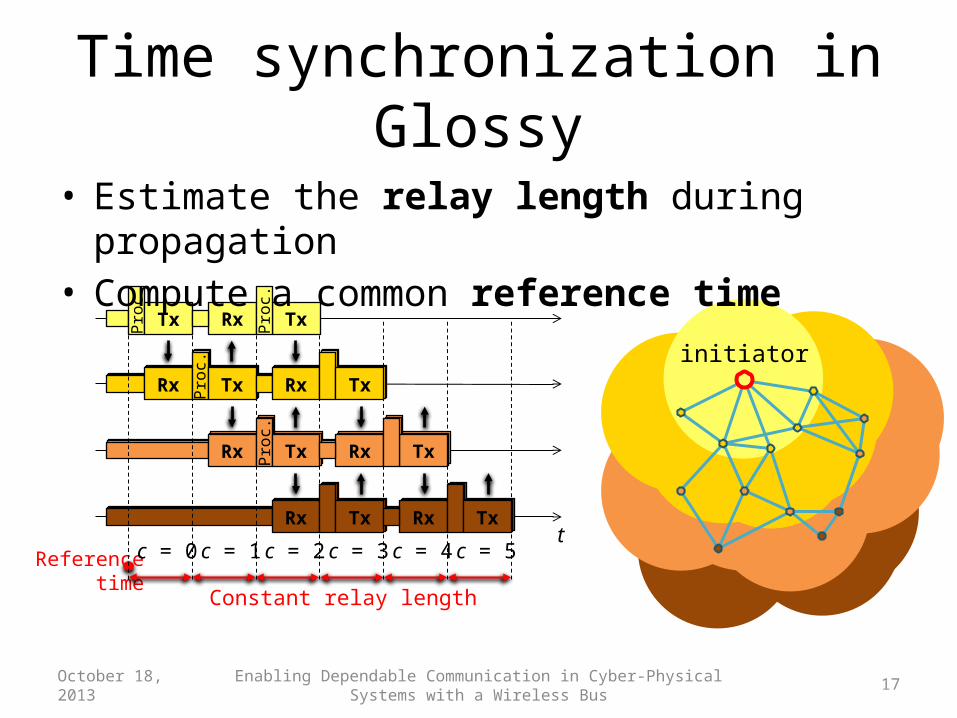
c = 0 c = 1 c = 2 c = 3 c = 4 c = 5t
(In this example a node transmits at most twice)
• A relay counter c is set to 0 at the first transmission• A node increments c before relaying the packet
initiatorRxRxRx
Proc
.
Tx
Proc
.
TxProc
.
TxProc
.
Tx
Rx
RxRxRx
RxRxRx
TxProc
.Pr
oc.
TxProc
.
TxProc
.
Tx
RxRxRx
Proc
.
Tx Proc
.
Tx Proc
.
Tx
RxRxRx
Proc
.
Tx Proc
.
Tx Proc
.
Tx
Proc
.
Tx Proc
.
TxTx
RxRxRx
Proc
.
Proc
.
Tx Proc
.
Tx Proc
.
Tx
c = 0 c = 1 c = 2 c = 3 c = 4 c = 5t
Enabling Dependable Communication in Cyber-Physical Systems with a Wireless Bus 17
Time synchronization in Glossy
October 18, 2013
Referencetime
Constant relay length
RxRxRx
Proc
.
Tx
Proc
.
TxProc
.
TxProc
.
Tx
Rx
RxRxRx
RxRxRx
TxProc
.Pr
oc.
TxProc
.
TxProc
.
Tx
RxRxRx
Proc
.
Tx Proc
.
Tx Proc
.
Tx
RxRxRx
Proc
.
Tx Proc
.
Tx Proc
.
Tx
Proc
.
Tx Proc
.
TxTx
RxRxRx
Proc
.
Proc
.
Tx Proc
.
Tx Proc
.
Tx
c = 0 c = 1 c = 2 c = 3 c = 4 c = 5t
• Estimate the relay length during propagation• Compute a common reference time
initiator
Enabling Dependable Communication in Cyber-Physical Systems with a Wireless Bus 18
Glossy: Main Evaluation Findings
• A few ms to flood packets to hundreds of nodes
• Reliability > 99.99 % in most scenarios
• Synchronization error < 1 µs even after 8 hops
October 18, 2013
Enabling Dependable Communication in Cyber-Physical Systems with a Wireless Bus 19
Multi-hop low-power wireless networkMulti-hop low-power wireless network
One-to-all communication
Global time synchronization
GlossyChapter 2 [IPSN 2011]
Time-triggered operation
Adaptive scheduling
LWB Chapter 3 [SenSys 2012]
Delivery guarantees
Failure management
VIRTUSChapter 4 [SRDS 2013]
One-to-all communication
Global time synchronization
GlossyChapter 2 [IPSN 2011]
Time-triggered operation
Adaptive scheduling
LWB Chapter 3 [SenSys 2012]
Delivery guarantees
Failure management
VIRTUSChapter 4 [SRDS 2013]
Safety-critical CPS applicationA concrete wireless bus that:
• Adapts to varying conditions and demands
• Efficiently supports a wide range of scenarios
• Delivers messages with high reliability
October 18, 2013
LWB: Objectives
Enabling Dependable Communication in Cyber-Physical Systems with a Wireless Bus 20
LWB Design Principles
• Bizarre idea: broadcast-only communication!– Multi-hop wireless network → Shared bus
• Synchronized, time-triggered operation– Collision-free and efficient bus accesses
• Centralized scheduling– A host node orchestrates all communication
October 18, 2013

Enabling Dependable Communication in Cyber-Physical Systems with a Wireless Bus 21
• LWB operation is confined to rounds
• A round consists of non-overlapping slots
• Each slot corresponds to adistinct Glossy flood
October 18, 2013
Round period T t
n1 n2 n3
n1
n1
Time-Triggered Operation in LWB
Enabling Dependable Communication in Cyber-Physical Systems with a Wireless Bus 22
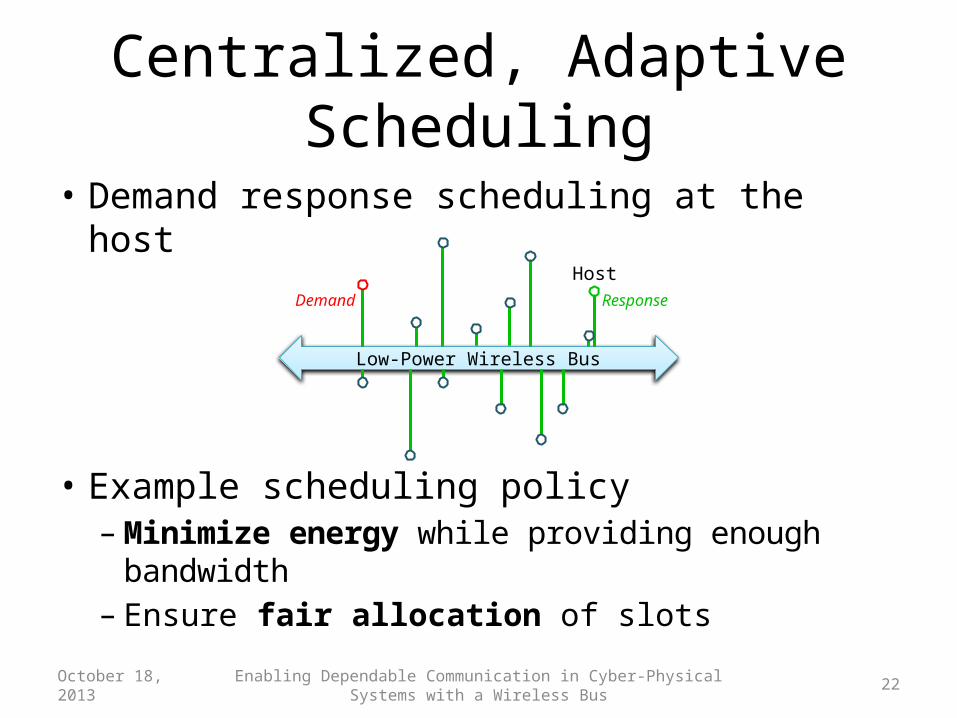
Centralized, Adaptive Scheduling
• Demand response scheduling at the host
• Example scheduling policy– Minimize energy while providing enough bandwidth– Ensure fair allocation of slots
October 18, 2013
Low-Power Wireless Bus
HostResponseDemand
Enabling Dependable Communication in Cyber-Physical Systems with a Wireless Bus 23
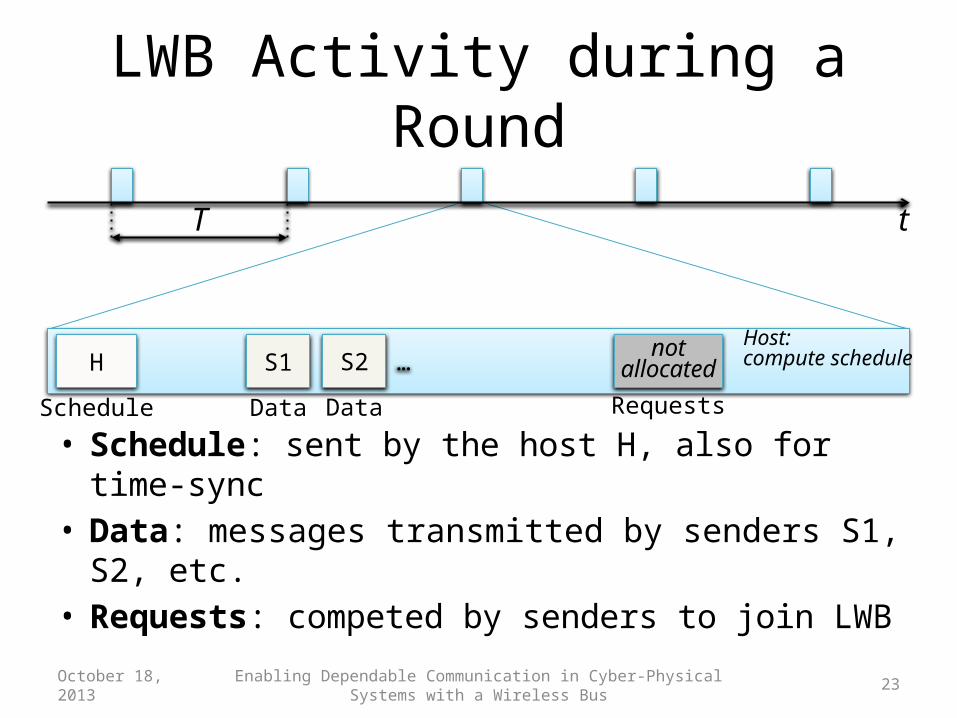
• Schedule: sent by the host H, also for time-sync• Data: messages transmitted by senders S1, S2, etc.• Requests: competed by senders to join LWB
T t
H
Schedule
notallocatedRequests
S1
Data
…S2
Data
LWB Activity during a Round
October 18, 2013
Host:compute schedule
Enabling Dependable Communication in Cyber-Physical Systems with a Wireless Bus 24
LWB
Additional LWB Mechanisms
October 18, 2013
Host failover policySupport for nodesjoining and disconnecting
Optimizations forenergy efficiency
Prompt adaptationto traffic changes
Enabling Dependable Communication in Cyber-Physical Systems with a Wireless Bus 25
LWB: Main Evaluation Findings(4 testbeds, 7 state-of-the-art protocols, 256 runs, 838 hours)
The same LWB prototype:
• Is efficient under a wide range of traffic loads
• Supports mobile nodes with no performance loss
• Is minimally affected by interference or failures
October 18, 2013
Enabling Dependable Communication in Cyber-Physical Systems with a Wireless Bus 26
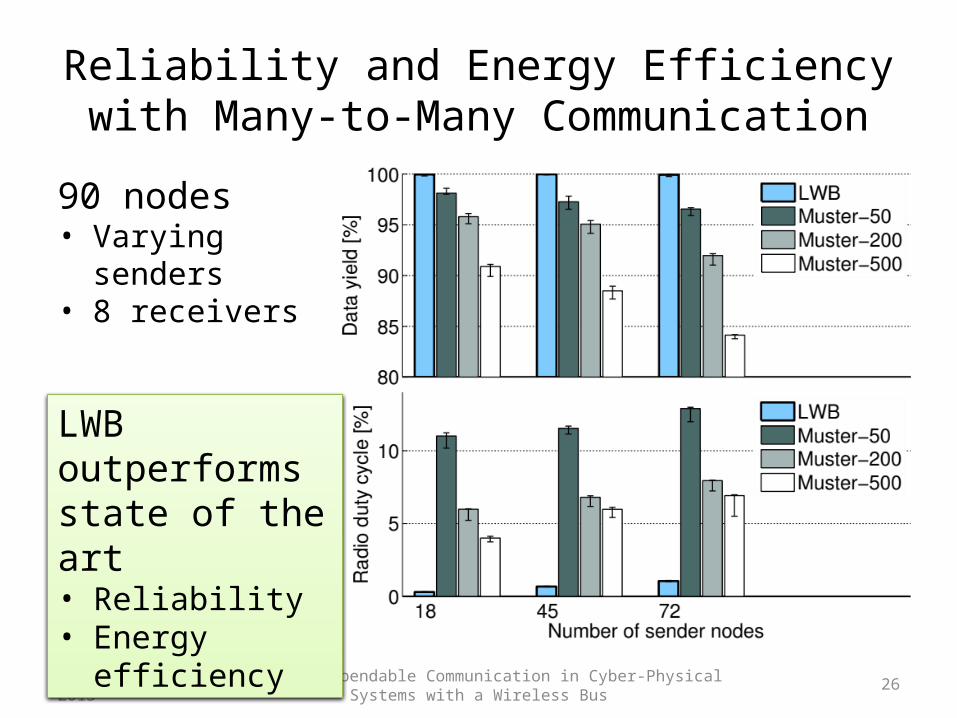
90 nodes• Varying senders• 8 receivers
Reliability and Energy Efficiency with Many-to-Many Communication
October 18, 2013
LWB outperforms state of the art• Reliability• Energy efficiency
Enabling Dependable Communication in Cyber-Physical Systems with a Wireless Bus 27
Multi-hop low-power wireless network
One-to-all communication
Global time synchronization
GlossyChapter 2 [IPSN 2011]
Time-triggered operation
Adaptive scheduling
LWB Chapter 3 [SenSys 2012]
Delivery guarantees
Failure management
VIRTUSChapter 4 [SRDS 2013]
One-to-all communication
Global time synchronization
GlossyChapter 2 [IPSN 2011]
Time-triggered operation
Adaptive scheduling
LWB Chapter 3 [SenSys 2012]
Delivery guarantees
Failure management
VIRTUSChapter 4 [SRDS 2013]
Safety-critical CPS application• Provide guarantees on message delivery– In the face of communication failures– In the face of node crashes
• Keep overhead low compared with LWB
October 18, 2013
VIRTUS: Objectives
Enabling Dependable Communication in Cyber-Physical Systems with a Wireless Bus 28
Key VIRTUS Mechanisms
• Guarantee virtually-synchronous executions– All nodes see the same events in the same order• Delivered messages• Joining and failing nodes
• Atomic multicast– Deliver messages reliably and with total order
• Group management– Share information on currently active nodes
October 18, 2013
(Formally proven)
Enabling Dependable Communication in Cyber-Physical Systems with a Wireless Bus 29
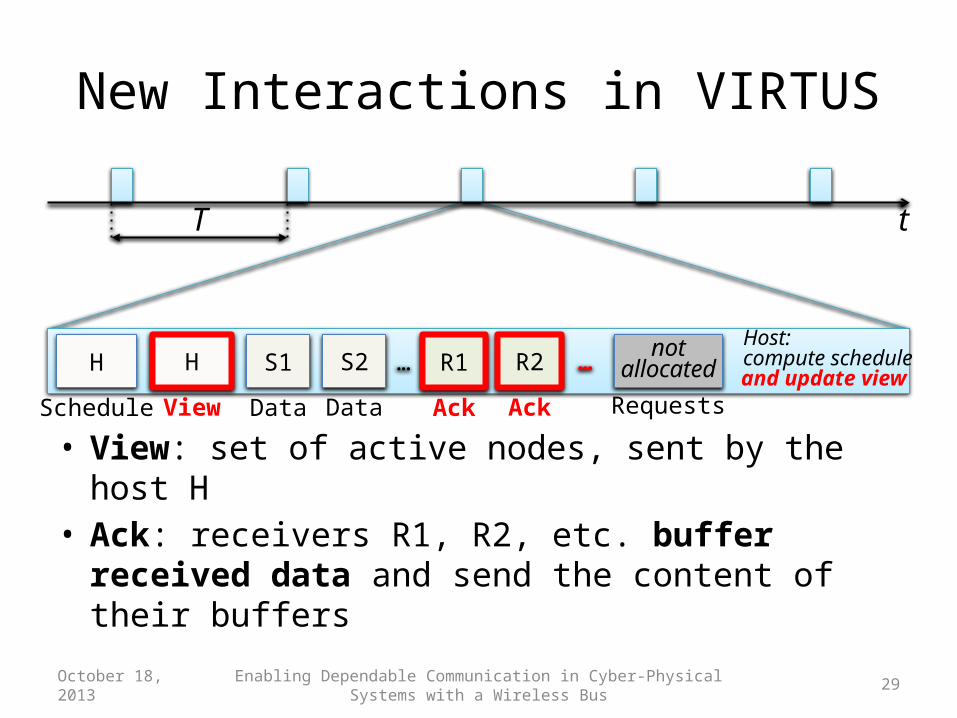
New Interactions in VIRTUS
• View: set of active nodes, sent by the host H• Ack: receivers R1, R2, etc. buffer received data and
send the content of their buffers
October 18, 2013
T t
H
Schedule
notallocatedRequests
S1
Data
…Host:compute scheduleS2
Data
H
View
R1
Ack
R2
Ack
…and update view
Enabling Dependable Communication in Cyber-Physical Systems with a Wireless Bus 30
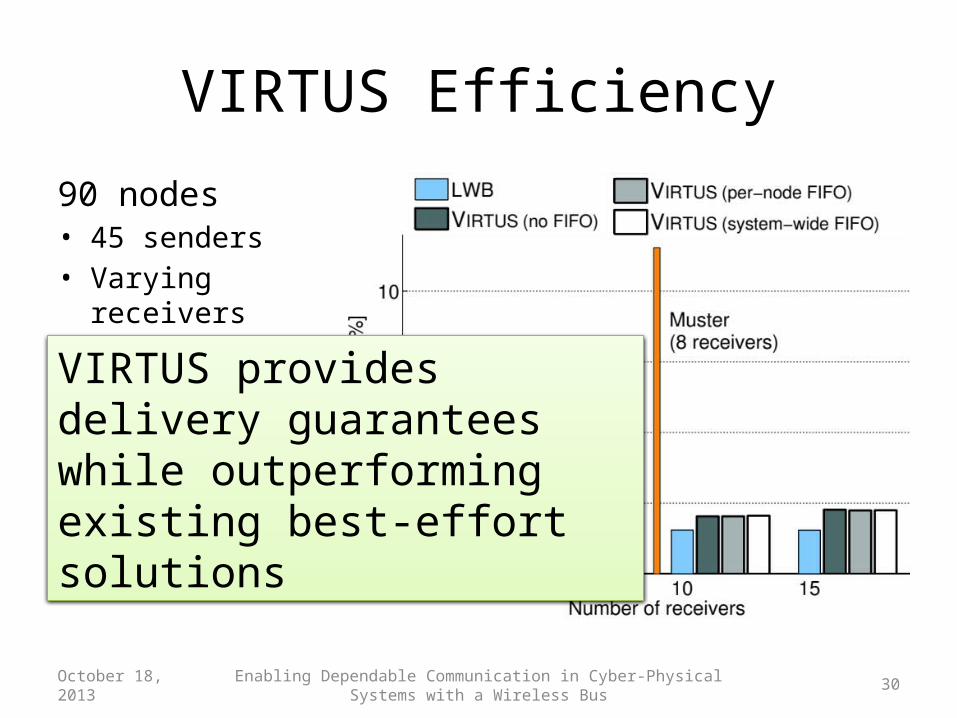
VIRTUS provides delivery guarantees while outperforming existing best-effort solutions
90 nodes• 45 senders• Varying receivers
VIRTUS Efficiency
October 18, 2013
Enabling Dependable Communication in Cyber-Physical Systems with a Wireless Bus 31
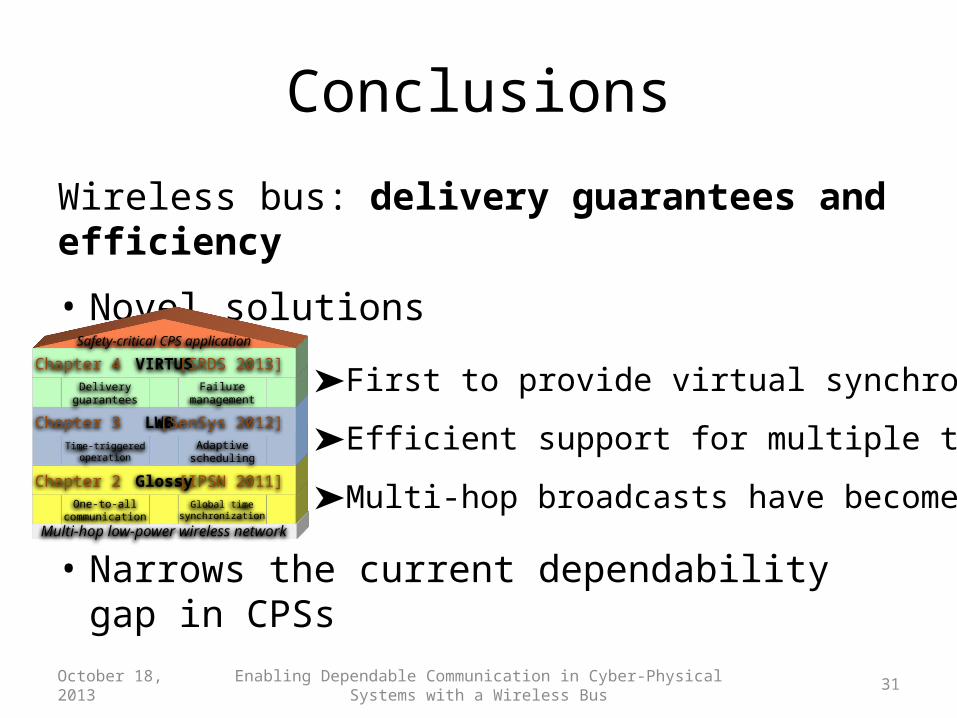
Conclusions
Wireless bus: delivery guarantees and efficiency
• Novel solutions
• Narrows the current dependability gap in CPSs
October 18, 2013
Multi-hop low-power wireless network
One-to-all communication
Global time synchronization
GlossyChapter 2 [IPSN 2011]
Time-triggered operation
Adaptive scheduling
LWB Chapter 3 [SenSys 2012]
Delivery guarantees
Failure management
VIRTUSChapter 4 [SRDS 2013] Safety-critical CPS application
➤Multi-hop broadcasts have become cheap!
➤Efficient support for multiple traffic patterns
➤First to provide virtual synchrony to CPSs
Enabling Dependable Communication in Cyber-Physical Systems with a Wireless Bus 32October 18, 2013
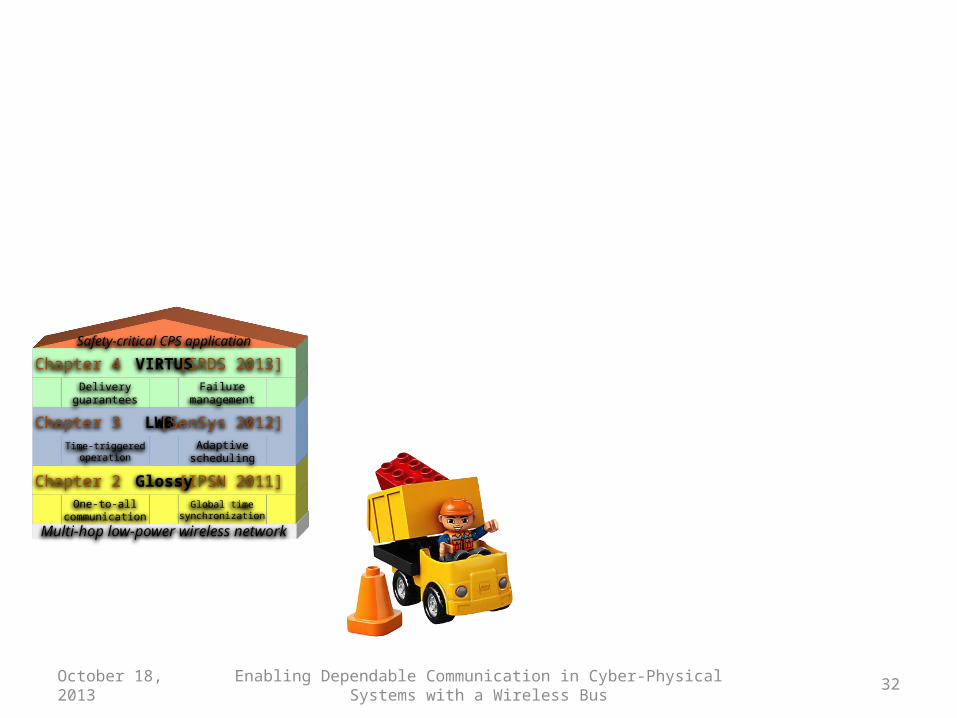
Multi-hop low-power wireless network
One-to-all communication
Global time synchronization
GlossyChapter 2 [IPSN 2011]
Time-triggered operation
Adaptive scheduling
LWB Chapter 3 [SenSys 2012]
Delivery guarantees
Failure management
VIRTUSChapter 4 [SRDS 2013] Safety-critical CPS application