Embed Size (px)
Citation preview

Energy harvesting from base excitation of ionic polymer metal composites in fluid
environments
This content has been downloaded from IOPscience. Please scroll down to see the full text.
Download details:
IP Address: 141.161.91.14
This content was downloaded on 02/10/2013 at 06:46
Please note that terms and conditions apply.
2010 Smart Mater. Struct. 19 015003
(http://iopscience.iop.org/0964-1726/19/1/015003)
View the table of contents for this issue, or go to the journal homepage for more
Home Search Collections Journals About Contact us My IOPscience

IOP PUBLISHING SMART MATERIALS AND STRUCTURES
Smart Mater. Struct. 19 (2010) 015003 (15pp) doi:10.1088/0964-1726/19/1/015003
Energy harvesting from base excitation ofionic polymer metal composites in fluidenvironmentsMatteo Aureli1, Chekema Prince1, Maurizio Porfiri1 andSean D Peterson2
1 Department of Mechanical and Aerospace Engineering, Polytechnic Institute of New YorkUniversity, Six MetroTech Center, Brooklyn, NY 11201, USA2 Mechanical and Mechatronics Engineering Department, University of Waterloo,200 University Avenue West, Waterloo, ON, N2L 3G1, Canada
E-mail: [email protected]
Received 28 June 2009, in final form 22 October 2009Published 19 November 2009Online at stacks.iop.org/SMS/19/015003
AbstractIn this paper, we analytically and experimentally study the energy harvesting capability ofsubmerged ionic polymer metal composites (IPMCs). We consider base excitation of an IPMCstrip that is shunted with an electric impedance and immersed in a fluid environment. Wedevelop a modeling framework to predict the energy scavenged from the IPMC vibration as afunction of the excitation frequency range, the constitutive and geometric properties of theIPMC, and the electric shunting load. The mechanical vibration of the IPMC strip is modeledthrough Kirchhoff–Love plate theory. The effect of the encompassing fluid on the IPMCvibration is described by using a linearized solution of the Navier–Stokes equations, that istraditionally considered in modeling atomic force microscope cantilevers. The dynamicchemo-electric response of the IPMC is described through the Poisson–Nernst–Planck model,in which the effect of mechanical deformations of the backbone polymer is accounted for. Wepresent a closed-form solution for the current flowing through the IPMC strip as a function ofthe voltage across its electrodes and its deformation. We use modal analysis to establish ahandleable expression for the power harvested from the vibrating IPMC and to optimize theshunting impedance for maximum energy harvesting. We validate theoretical findings throughexperiments conducted on IPMC strips vibrating in aqueous environments.
(Some figures in this article are in colour only in the electronic version)
1. Introduction
Recent developments in lightweight smart materials haveopened the door to scientific and technological advancementsin the area of energy harvesting. Low consumption electronicdevices can potentially be powered by energy extracted fromthe surroundings, such as from mechanical vibrations andtemperature gradients, see for example [1–7]. The primarybenefits of powering devices via energy harvesting as opposedto traditional batteries are extended device lifetime, limitedmaintenance, and reduced onboard weight. Comprehensiveoverviews of energy harvesting methods and applications canbe found in [8–11].
Energy harvesting from mechanical vibrations hasgarnered particular attention as a simple and viable wayto scavenge power using active materials. Piezoelectricshave seen considerable research efforts in the conversion ofmechanical energy into electrical energy via deformation, seethe reviews in [12, 13]. In [14, 15], energy harvestingfrom the base excitation of cantilevered piezoelectric beamsis modeled and experimentally validated. Enhancing theenergy harvesting capabilities of piezoelectrics using nonlinearcircuit elements is presented in [16], and energy harvestingfrom broad frequency ranges is discussed in [17]. Storageof electric energy harvested from piezoelectric actuators isdiscussed in [18, 19]. Optimization of design parameters, such
0964-1726/10/015003+15$30.00 © 2010 IOP Publishing Ltd Printed in the UK1

Smart Mater. Struct. 19 (2010) 015003 M Aureli et al
as piezoelectric coupling and load impedance, are discussed forexample in [20, 21]. Energy harvesting using magnetostrictivematerials, ferroelectric ceramics, and dielectric elastomers isstudied in [22], [23], and [24], respectively.
Ionic polymer metal composites (IPMCs) are a novelclass of electro-active polymers that have recently becomethe subject of considerable research efforts due to theirpropitious attributes for both sensing and actuation. AnIPMC is a porous ionic polymer saturated with an electrolyticsolution and plated by two metallic electrodes, see forexample [25]. A voltage difference across the electrodesgenerates structural deformations; similarly, a mechanicaldeformation yields a voltage difference across the electrodes.The electrolytic solution comprises a mobile counterionspecies and an uncharged solvent. Interactions betweenthe mobile ions and the solvent and between the solventand the backbone polymer are responsible for sensing andactuation [26]. A comprehensive review of modeling,fabrication, and applications of IPMCs up to the earlypart of this decade can be found in [27–30]. Recentmodeling efforts include black-box linear and nonlinearmodels, see for example [31–34], and physics-based modelsthat employ multiphase mixture theory and Poisson–Nernst–Planck equations, see for example [35–46]. Advancedfabrication techniques are presented in [47, 48]. Recentapplications span underwater propulsion systems [49–54],force and displacement sensors [55–58], and grippers andmanipulation systems [59–61].
Energy harvesting using IPMCs vibrating in an airenvironment is demonstrated in [4–6]. In [4], IPMCsconsisting of two different electrode materials are testedand compared under cyclic bending, tension, and shear.The experimental data demonstrate the feasibility of energyharvesting using IPMCs. In [5], an IPMC strip under baseexcitation is modeled as an Euler–Bernoulli beam. The modalstrain of the fundamental vibration mode is converted into anelectrical signal through a black-box IPMC model that is tunedfor separately addressing open and short circuit conditions.The power output from the vibrating IPMC is estimated fromthe product between the short circuit current amplitude andthe open circuit voltage amplitude. Experimental data showthat the power extracted from a vibrating IPMC of thickness200–400μm and in-plane area of approximately 5 cm2 is of theorder of 0.1 μW for a base excitation of 1 cm. In [6], energyharvesting devices based on IPMCs undergoing longitudinalvibrations in air are modeled, tested, and compared with resultsfrom piezoelectric polymer polyvinylidene fluoride (PVDF)samples. The IPMC energy harvesting performance reportedtherein is of the order of 1 nW for a sample of thickness200 μm, and in-plane area of approximately 8 cm2 subjectedto strains of the order of 105 μstrain.
In the present study, we analyze the energy harvested froma cantilevered IPMC strip submerged in a fluid environmentand subjected to base excitation. We extend the frameworkoriginally developed in [38, 40, 44] for analyzing the electricresponse and the electromechanical actuation of IPMCs tomodel dynamic sensing. In particular, we account for theeffect of the deformations of the backbone polymer on the free
charge density to describe IPMC sensing, that is, alterationsof the voltage distribution within the polymer region. Wederive closed-form solutions for the counterion concentrationand voltage distribution. We use these expressions to computethe current flowing through the IPMC strip subjected to time-varying deformations. We study the deformations of thesubmerged IPMC strip in response to base excitation usingmodal analysis. We derive a closed-form expression forthe power harvested by a shunting impedance in responseto base excitation. We propose a reduced order model forlow frequency base excitation of vibrating submerged IPMCs.We use the reduced order model to develop a qualitativeunderstanding of the physics of energy extraction in IPMCsand to optimize the system parameters. We validate thetheoretical model using an in-house developed experimentalconfiguration consisting of an IPMC strip vibrating in water.
The paper is organized as follows. Section 2 introduces theproblem statement, including the governing equations for thevibrations of the submerged IPMC and the chemo-mechano-electric formulation for the IPMC dynamic response. Section 3presents a detailed analysis of the governing equations.Section 4 describes the harvesting capabilities of submergedIPMCs undergoing base excitation. The experimental setupand results are discussed in section 5. Section 6 is left fordiscussion and conclusions.
2. Problem statement
We consider a cantilevered IPMC rectangular strip of thickness2H , length L, and width b. Material points in the IPMCregion are identified through the Cartesian coordinate systemx , y, and z. The origin of the coordinate system lies atthe geometric center of the IPMC clamped face, and the xzplane is selected to be parallel to the electrode surfaces in theundeformed configuration, see figure 1. In addition, we assumethat the IPMC electrodes have constant thickness equal to d ,and we refer to the polymer semithickness as h = H − d .Therefore, we do not consider the presence of rough landscapesat the polymer electrode interface, which are responsible forthe large capacitances of IPMCs, see for example [62, 63].The electrode surface roughness is compensated for by propertuning of the chemo-electric properties of the IPMCs, see forexample [38–40, 44, 45, 64–66].
We study the vibration of the IPMC strip submerged ina fluid in response to base excitation from oscillation of itsclamped end along the y axis. Towards understanding theenergy harvesting capability of vibrating IPMCs, we shunt theIPMC electrodes via a passive linear load, see figure 1.
We assume that the IPMC thickness is considerablysmaller than its length and width, that the IPMC undergoessmall deformations while vibrating in the encompassingfluid, and that the deformations are restricted to the xyplane. Therefore, we describe the vibrating IPMC as aKirchhoff–Love plate undergoing cylindrical bending, see forexample [67]. Within this theory, the strip vibration isdescribed by the sole deflection field w(x, t) along the y axis,where t is the time variable. Further, the strip cross sections areassumed to be rigid and orthogonal to the IPMC axis and the
2

Smart Mater. Struct. 19 (2010) 015003 M Aureli et al
Figure 1. Nomenclature for the reference geometry.
effect of their rotary inertia is discarded. Thus, the dilatationwithin the IPMC body �(x, y, t) is given by
�(x, y, t) = −y∂2w(x, t)
∂x2. (1)
In light of these assumptions, the governing equation ofthe vibrating IPMC is
KM∂4w(x, t)
∂x4+ ρ
∂2w(x, t)
∂ t2= −ρ d2W (t)
dt2
+ f (x, t)+ s(x, t), (2)
where W (t) is the transverse motion of the IPMC clamp alongthe y axis, ρ is the mass density per unit IPMC length, andKM is the IPMC bending stiffness. In (2), f (x, t) denotesthe lateral force per unit length exerted by the encompassingfluid on the IPMC strip. In addition, s(x, t) models structuraldamping in the IPMC and incorporates unmodeled dampingeffects on the IPMC vibration. We note that (2) discards IPMCconverse coupling due to polarization excess in the IPMC fromcharge redistribution, see for example [46]. In other words, weassume that the mechanical vibrations of the IPMC strip arenot affected by the chemo-electric behavior of the IPMC. Theboundary conditions for the deflection field w(x, t) are
w(0, t) = 0,∂w(x, t)
∂x
∣∣∣∣x=0
= 0, (3a)
∂2w(x, t)
∂x2
∣∣∣∣x=L
= 0,∂3w(x, t)
∂x3
∣∣∣∣x=L
= 0. (3b)
Initial conditions are not specified since our interest is onsteady-state forced vibrations.
We assume that the encompassing fluid is Newtonian andincompressible and we model its effects on IPMC vibrationusing the closed-form solution proposed in [68, 69] basedon linearized Navier–Stokes equations, see section 3. Thestructural damping term s(x, t) is identified from experimentaldata. This term accounts for the viscoelastic nature ofthe backbone polymer, the solvent diffusion in the IPMCregion, and, from a more general standpoint, for thedynamic interactions between the phases comprising the IPMCthat may lead to complex damping phenomena as thoseobserved in poromechanics, see for example [70–72]. Theexperimentally identified structural damping may potentiallycompensate for macroscopic surface roughness, moderatelylarge displacements, finite IPMC length, and local IPMCcurvature effects that are not modeled in the formulation
of [68, 69], as well as nonideal boundary conditions and fluidconfinement effects in experiments.
We model the IPMC chemo-mechano-electric responseusing the formulation proposed in [38, 40, 44]. Within thisframework, the IPMC chemo-electric response is described bythe concentration of the mobile counterion per unit hydratedpolymer volume c(x, y, t) and the electric potentialψ(x, y, t).The time evolution of these fields is dictated by the Poisson–Nernst–Planck (PNP) model. The dependence on the z variableis discarded due to the strip cylindrical bending and theelectrode flatness. We assume that the voltage within thepolymer region is smaller than the thermal voltage Vth =RT/F , where R is the universal gas constant, F is the Faradayconstant, and T is the IPMC temperature. This conditionallows for linearizing the PNP model, see for example [63].Further, we assume that the counterion diffusivity D, thehydrated polymer dielectric constant εr, and the concentrationof fixed ions in the IPMC undeformed configuration c0 areconstant in the polymer region. Under these assumptions, thePNP model reduces to
∂c(x, y, t)
∂ t= D
[∂2c(x, y, t)
∂y2+ Fc0
RT
∂2ψ(x, y, t)
∂y2
]
, (4a)
− ε0εr∂2ψ(x, y, t)
∂y2= F[c(x, y, t)− c0(1 −�(x, y, t))],
(4b)where ε0 is the vacuum permittivity. We note that (4a) and (4b)assume that the IPMC thickness is considerably smaller thanthe length, that is, the electrodes are locally parallel, seefor example [41, 46]. Further, we note that the right-handside of (4b) represents the free charge density in the polymerregion per unit hydrated polymer volume. The presence of thedilatation term 1 − �(x, y, t) allows for describing changesin the fixed charge density in response to deformations of thebackbone polymer, see for example [46].
The boundary conditions for (4a) and (4b) are
ψ(x,±h, t) = ± V (t)
2, (5a)
[∂c(x, y, t)
∂y+ Fc0
RT
∂ψ(x, y, t)
∂y
]∣∣∣∣
y=±h
= 0, (5b)
where V (t) is the voltage across the IPMC electrodes.Equation (5b) enforces ion-blocking at the electrodes.Therefore, the mobile counterions are forced to remain withinthe polymer region and their redistribution is responsible forIPMC electric response. The charge per unit electrode surfacearea stored in the IPMC is given by the jump of the electricdisplacement at the polymer–electrode interface. Thus, thecharge stored in the IPMC per unit length is given by
q(x, t) = bε0εr∂ψ(x, y, t)
∂y
∣∣∣∣
y=h
. (6)
Consequently, the total current I (t) through the IPMC sampleis
I (t) = bε0εr
∫ L
0
∂2ψ(x, y, t)
∂y∂ t
∣∣∣∣
y=h
dx . (7)
3

Smart Mater. Struct. 19 (2010) 015003 M Aureli et al
The current in (7) is the so called displacement current,generated by the time variation of the charge stored at theelectrodes. The hypothesis of ion-blocking electrodes impliesthat Faradaic currents, related to the ion flux through the IPMC,do not take place, see for example [73]. The current throughthe IPMC and the voltage across its electrodes are related by
I (t) = −Y�(t) � V (t), (8)
where � denotes the convolution integral and Y�(t) is theadmittance of the electric load. The negative sign in (8) is dueto the sign convention.
3. Analysis
3.1. Chemo-mechano-electric response
For convenience, we rewrite the PNP model in terms of theconcentration difference χ(x, y, t) = c(x, y, t) − c0, thatis, in terms of the net free ion concentration. In addition,we conduct our analysis in the frequency domain by Fourier-transforming (4a), (4b), (5a), and (5b), which thus become
iωχ(x, y, ω) = D
[∂2χ(x, y, ω)
∂y2+ Fc0
RT
∂2ψ(x, y, ω)
∂y2
]
,
(9a)
− ε0εr∂2ψ(x, y, ω)
∂y2= F
[
χ(x, y, ω)− c0 y∂2w(x, ω)
∂x2
]
,
(9b)
ψ(x,±h, ω) = ± V (ω)
2, (9c)
[∂χ(x, y, ω)
∂y+ Fc0
RT
∂ψ(x, y, ω)
∂y
]∣∣∣∣
y=±h
= 0, (9d)
where a superimposed hat indicates Fourier-transformedquantities, i = √−1 is the imaginary unit, and ω is theradian frequency. Equations (9a)–(9d) can be integrated withrespect to the y variable to yield the concentration and voltageprofile within the bulk polymer region for the voltage V (ω) anddeformation ∂2w(x, ω)/∂x2. More specifically, the solutionfor the voltage profile can be expressed as follows
ψ(x, y, ω) = �V (y, ω)V (ω)+��(y, ω)∂2w(x, ω)
∂x2. (10a)
Here, the coefficients �V (y, ω) and ��(y, ω) are given by
�V (y, ω) = 1
2
sinh(νy/h)+ iωτ(νy/h) cosh (ν)
sinh(ν)+ iωτν cosh (ν), (10b)
��(y, ω) = Fc0h3
6ε0εr(1 + iωτ)
{y
h
[(
1 − y2
h2
)
× (ωτ)2ν cosh(ν)−(
6λ2
h2+ iωτ
(
3 − y2
h2
))
sinh(ν)
]
+ 2
(
3λ2
h2+ iωτ
)
sinh(νy/h)
}
× 1
sinh (ν)+ iωτν cosh (ν), (10c)
where we introduced the parameters ν, λ, and τ , defined asfollows
ν = h
λ
√1 + iωτ, λ = 1
F
√
ε0εr RT
c0, τ = λ2
D.
(11)In (11), λ denotes the so called Debye screening length thatquantifies the thickness of the diffuse charge layers at thepolymer–electrode interface and τ is a characteristic timeconstant for the counterion diffusion within the diffuse layers,see for example [43]. Furthermore, the parameter ν is a root ofthe characteristic equation stemming from the linear ordinarydifferential equation for χ that is obtained by eliminating ψfrom (9a)–(9d).
The charge per unit IPMC length is derived from theelectric potential distribution using (6), (10a)–(10c)
q(x, ω) = bα(ω)V (ω)+ bβ(ω)∂2w(x, ω)
∂x2. (12)
Here, the functions α(ω) and β(ω) are defined by
α(ω) = ε0εr∂�V (y, ω)
∂y
∣∣∣∣
y=h
= ε0εr
2λ
(1 + iωτ)3/2
iωτν + tanh (ν), (13a)
β(ω) = ε0εr∂��(y, ω)
∂y
∣∣∣∣
y=h
= Fc0λ2ν
1 + iωτ
1 + 13 iωτν2 − tanh (ν)/ν
tanh (ν)+ iωτν. (13b)
Therefore, the overall current flowing through the IPMCstrip is given by
I (ω) = iωbLα(ω)V (ω)+ iωbβ(ω)ϑ(ω), (14)
where we integrated by parts (7) accounting for (3a) andwe defined the IPMC tip rotation ϑ(t) = ∂w(x,t)
∂x |x=L .Equation (14) illustrates that the IPMC can be viewed as theparallel connection of an admittance and a current sourcedriven by the mechanical deformation, that is,
I (ω) = Y (ω)V (ω)+ HIϑ (ω)ϑ(ω), (15)
where we introduced the IPMC admittance Y (ω) and thetransfer function HIϑ (ω)
Y (ω) = iωbLα(ω), (16a)
HIϑ (ω) = iωbβ(ω). (16b)
3.2. Vibrations
We write (2) in the frequency domain by taking the Fourier-transform of both sides, that is,
KM∂4w(x, ω)
∂x4− ρω2w(x, ω) = ρω2W (ω)
+ f (x, ω)+ s(x, ω). (17)
Following [74–77], the lateral force exerted by the viscous fluidis a function of the time derivatives of the absolute motion of
4

Smart Mater. Struct. 19 (2010) 015003 M Aureli et al
the body w(x, t) + W (t). In the frequency domain, this forceis expressed in the form
f (x, ω) = ρω2γ (ω)[w(x, ω)+ W (ω)]. (18a)
The complex term γ (ω) can be conveniently decomposed intoan added mass effect γR(ω) > 0 and a viscous damping effectγI (ω) > 0. These terms can be rewritten as
γ (ω) = γR(ω)− iγI (ω) = π�fb2
4ρ[�′(ω)− i�′′(ω)], (18b)
where �f is the fluid mass density and the hydrodynamicfunctions�′(ω) and �′′(ω) are generally dependent on the fluiddynamic viscosity μ, the fluid mass density, and the IPMCwidth and thickness. We note that the strip mass per unit lengthρ is included in the definition of f (x, ω) and γ (ω) for scalingconvenience. In addition, among other hypotheses, (18a)and (18b) ignore local changes in the fluid flow due to rotationsof the cross section and local curvature. In other words, (18a)and (18b) assume that the strip is locally flat and are thus validonly for low structural modes, see for example [78].
The hydrodynamic functions can also be expressed interms of the flow Reynolds number, defined as Re =�fb2ω/(4μ), that depends linearly on the radian frequency.Approximate expressions for the hydrodynamic functions inthe case of thin cantilever beams are presented in [69]. Theseexpressions are formulated as corrections to the hydrodynamicfunctions of cylinders and are accurate in a wide range ofReynolds numbers. Further, handleable approximations ofthese functions are presented in [74, 75, 77], where the fullexpression given in [68, 69] is fitted over a limited rangeof Reynolds numbers. More specifically, in [75, 77], thehydrodynamic functions �′(ω) and �′′(ω) are expressed ina polynomial form in the parameter ξ = 1/
√2Re, which
represents the ratio between the depth of the viscous layersurrounding the vibrating IPMC and the IPMC width. Thefunctional form proposed in [75, 77] is
�′(ξ) = a1 + a2ξ, �′′(ξ) = a3ξ + a4ξ2. (18c)
The values of the parameters a1, a2, a3, and a4 canbe determined by least square fitting of the hydrodynamicfunctions over the desired range of Reynolds number or,equivalently, ξ .
The structural damping is described using a simplehysteretic model for the IPMC vibration of the form
s(x, ω) = −iηKM∂4w(x, ω)
∂x4, (19)
where η represents a constant loss factor, see for example [79],that is identified from experiments. For future use, we denotethe loss factor for in vacuum vibrations with η. In general,these coefficients may differ since the multiphase chemical andmechanical nature of the IPMC may induce dependence onhydration level and interactions with the surrounding medium.By combining (17), (18a), and (19), we obtain
KM
ρ(1 + iη)
∂4w(x, ω)
∂x4− ω2[1 + γ (ω)]w(x, ω)
= ω2[1 + γ (ω)]W (ω). (20)
We derive a series solution for the forced vibrations ofthe IPMC by projecting the Fourier-transform of the deflectionfield on the mode shapes of the cantilevered IPMC strip invacuum. Therefore, we write
w(x, ω) =∞∑
n=1
pn(ω)ϕn(x), (21)
where pn(t) is the nth modal coefficient of the expansion andϕn(x) is the nth mode shape of the IPMC in vacuum. Morespecifically, ϕn(x) is given by
ϕn(x) = Cn
[
sin(�n x)− sinh(�nx)− sin(�n L)+ sinh(�n L)
cos(�n L)+ cosh(�n L)
× (cos(�n x)− cosh(�nx))
]
, (22)
where Cn is a normalization coefficient and �4n is the nth
eigenvalue of the fourth derivative differential operator in theinterval (0, L) with cantilever-type boundary conditions, seefor example [79]. The numerical values of the first foureigenvalues are �1 L = 1.8751, �2L = 4.6941, �3 L =7.8548, and �4 L = 10.9955. We select the normalizationcoefficients Cn so that
∫ L0 ϕ
2n(x) dx = 1. By projecting (20)
on the set {ϕn}∞n=1 and using (21) along with the orthogonalityof the mode shapes in (0, L), we find the following algebraicequation for the Fourier-transform of the nth modal coefficient
pn(ω) = ω2[1 + γ (ω)] ∫ L0 ϕn(x) dx
ω2n(1 + iη)− ω2[1 + γ (ω)] W (ω), (23)
whereωn = �2
n
√
KM/ρ, (24)
is the nth IPMC undamped radian resonance frequency invacuum.
The deflection of the IPMC strip in response to the baseexcitation is obtained by replacing (23) in (21). In particular,the Fourier-transforms of the tip displacement δ(t) and the tiprotation ϑ(t) are given by
δ(ω) = HδW (ω)W (ω), (25a)
ϑ(ω) = HϑW (ω)W (ω), (25b)
where we introduced the transfer functions
HδW (ω) =∞∑
n=1
ω2[1 + γ (ω)] ∫ L0 ϕn(x) dx
ω2n(1 + iη)− ω2[1 + γ (ω)]ϕn(L), (26a)
HϑW (ω) =∞∑
n=1
ω2[1 + γ (ω)] ∫ L0 ϕn(x) dx
ω2n(1 + iη)− ω2[1 + γ (ω)]
dϕn(x)
dx
∣∣∣∣x=L
.
(26b)Further, by minimizing the magnitude of the denominator
of (26a), we find an approximate expression for the nth radianresonance frequency ωn in terms of the undamped resonancefrequency in vacuum ωn , that is,
ωn � ωn
√
1 + γR(ωn)− ηγI (ωn)
(1 + γR(ωn))2 + γI (ω2n), (27)
where we assumed that the function γ (ω) in (18b) isapproximately constant in the range of frequencies betweenωn and ωn . This assumption is satisfactory especially formoderately large Reynolds numbers, see for example [68, 69].
5

Smart Mater. Struct. 19 (2010) 015003 M Aureli et al
4. Harvesting capabilities
By combining (8) with (15) and (26b), we find the followingexpression for the voltage across the IPMC as a function of thebase excitation
V (ω) = −HIϑ (ω)HϑW (ω)
Y�(ω)+ Y (ω)W (ω), (28)
where we used the same symbol to indicate the admittance inthe time and frequency domains. The sensor behavior of theIPMC strip, that is, the voltage output from base excitationin open circuit conditions, is obtained from (15) and (26b)by setting I (ω) = 0 or, equivalently, from (28) by settingY�(ω) = 0, that is,
VOC(ω) = −β(ω)HϑW (ω)
α(ω)LW (ω). (29)
In (29), VOC(ω) denotes the Fourier-transform of the opencircuit voltage from the IPMC strip. Similarly, the short circuitbehavior of the system is given by
ISC(ω) = iωbβ(ω)HϑW (ω)W (ω), (30)
that is obtained from (15) and (26b) by setting V (ω) = 0.In (30), ISC(ω) denotes the Fourier-transform of the shortcircuit current flowing through the IPMC strip.
The power transferred to the shunting admittance Y�(ω) is
P(ω) = 12 |V (ω)|2 Re[Y�(ω)]
= 1
2
|HIϑ (ω)|2|HϑW (ω)|2|Y�(ω)+ Y (ω)|2 Re[Y�(ω)]|W (ω)|2, (31a)
where Re[•] indicates the real part. At a given frequency ω,the power transferred to the load in (31a) is maximized bymatching the load admittance with the IPMC admittance, seefor example [80], that is, by setting Y�(ω) = Y ∗(ω), where∗ denotes complex conjugation. In this case, the maximumpower is
Popt(ω) = 1
8
|HIϑ (ω)|2|HϑW (ω)|2Re[Y (ω)] |W (ω)|2. (31b)
In order to provide a physics ground to this analysis, weconsider low frequency base excitation of the IPMC strip.More specifically, we consider the range ωτ � 1. In thiscase, ν � h/λ and the expressions for α(ω) and β(ω) in (13a)and (13b) can be approximated by
α(ω) � α(ω) = ε0εr
2λ
1
1 + iω(τh/λ), (32a)
β(ω) � β(ω) = 1
3Fc0h2(τh/λ)
iω
1 + iω(τh/λ), (32b)
where we further assumed that the Debye screening length isconsiderably smaller than the semithickness of the polymerregion, that is, h/λ � 1 and ωτν � 1. Thus, theIPMC admittance Y (ω) in (16a) is approximated by the series
connection of a capacitor C = bLε0εr/(2λ) and a resistorR = 2hτ/(bLε0εr), that is,
Y (ω) � Y (ω) = iωC1 + iωT
, (33a)
where we defined the characteristic time constant of the electricsubsystem T = RC = τh/λ. In addition, the transfer functionHIϑ (ω) in (16b) is approximated by
HIϑ (ω) � HIϑ (ω) = (iω)2B1 + iωT
, (33b)
where B = Fc0h2bT /3. Further, we assume that only the firstN modes are excited by the beam vibration. Therefore, wereplace the series in (26a) and (26b) with a summation from1 to N and we refer to the truncated transfer functions with asuperimposed tilde, that is, HδW and HϑW .
The power transferred to the electric load is determinedby substituting the functions in (31a) with their approximatedforms, thus obtaining
P(ω) � P(ω) = ω4B2
2(1 + ω2T 2)
× |HϑW (ω)|2| iωC
1+iωT + Y�(ω)|2Re[Y�(ω)]|W (ω)|2. (34a)
The maximum power transfer is obtained by selecting amatching load admittance, that is,
Y opt� (ω) = ω2T C
1 + ω2T 2− i
ωC1 + ω2T 2
, (34b)
that results in the optimal power transfer
Popt(ω) = ω2B2
8T C|HϑW (ω)|2|W (ω)|2. (34c)
The matching condition may be practically difficult in the caseof low frequency vibrations typical of IPMCs operating influid environments due to the large value of the imaginarypart of Y opt
� in (34b). Similar practical problems areencountered in harvesting systems based on piezoelectrics, seefor example [9, 21].
We consider the suboptimal scenario in which the electricload is purely resistive, that is, Y�(ω) = 1/R�, where R� is theload resistance. Under these assumptions, (34a) becomes
P(ω) = ω4B2
2(1 + ω2T 2)
× R�(1 + ω2T 2)
[1 + ω2(T + R�C)2] |HϑW (ω)|2|W (ω)|2. (35a)
The maximum power transfer is attained by setting thederivative of P(ω) with respect to the load resistance to zero.The optimal resistance Rsub
� is found to be equal to
Rsub� = 1
ωC√
1 + ω2T 2. (35b)
In this case, the maximum power transfer is
Psub(ω) = ω3B2
4C1
ωT + √1 + ω2T 2
|HϑW (ω)|2|W (ω)|2.(35c)
6

Smart Mater. Struct. 19 (2010) 015003 M Aureli et al
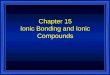
Figure 2. (a) Overall view of the experimental setup and (b) detail of the IPMC sample and the aluminum clamp.
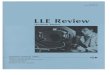
Figure 3. Schematics of the experimental setup. The switch positions (a) and (b) allow for voltage, current, and power measurements in opencircuit, short circuit, and loaded conditions.
For moderately large frequency, that is, ωT � 1, (35b) showsthat the optimal load resistance Rsub
� should equal the IPMCinternal resistance R.
To fully characterize the IPMC behavior describedin (16a) and (16b) and assess its energy harvesting capability,we experimentally identify three parameters, namely, theIPMC capacitance C, the characteristic discharge time T , andthe mechano-electric coupling gain B.
5. Experiments
5.1. Experimental scheme
The experimental setup illustrated in figure 2 is devisedto characterize the energy harvesting capabilities of anIPMC strip undergoing underwater vibration driven by baseexcitation. More specifically, we refer to the schematics infigure 3.
The IPMC sample used in this study, purchasedfrom Environmental Robots, Inc., is neutralized withsodium counterions and stored in deionized water betweenexperimental sessions. The in-plane dimensions of the sample
are approximately 30 mm in length and b = 5.8 mm in width,see figure 1. The sample thickness is approximately 200 μm.The mass per unit length of the sample is estimated from directweight measurement to be ρ = 3.48 × 10−3 kg m−1.
The IPMC sample is tested in a 2 liter pool filled withdeionized water at room temperature. The sample is arrangedin a cantilever configuration; one of its ends being firmlyclamped in an aluminum clamp that is rigidly attached to aBruel & Kjaer type 4810 Mini Shaker. The free vibrationlength is set to L = 25 mm, see figure 1. The two platescomposing the aluminum clamp are electrically insulated andconnected to wires that carry the electric signal from the IPMCto a National Instruments PCI 6229 data acquisition (DAQ)board. In addition, nylon screws are used to tighten theclamp in order to provide mechanical support and prevent shortcircuit conditions. The plates of the aluminum clamp aresanded with carbide paper before each experimental sessionto enhance the electrical conductivity. This removes theoxidized layer that forms on the clamping surfaces duringtypical operation. The motion of the clamped end of theIPMC is imparted by the shaker, which is rigidly fixed to avibration isolation table. The shaker is driven using a custom
7

Smart Mater. Struct. 19 (2010) 015003 M Aureli et al
LabVIEW 8.2 Virtual Instrument (VI) designed to output thedesired voltage waveform from an analog output channel ofthe acquisition board. The signal is then amplified by aHP-Harrison 4124A power amplifier to set the desired baseexcitation amplitude. The actual motion of the clamped edgeof the IPMC is constantly monitored by using a Keyence LB-11 laser displacement sensor, whose output signal is acquiredby the DAQ board at a sampling frequency of 1 kHz. The baseexcitation is in the range 0.8–1.4 mm.
A sinusoidal voltage signal is selected to drive the shaker.As the actuation frequency is varied in the broad range of2–50 Hz, the voltage output from the IPMC is fed into the testcircuit depicted in figure 3, where it is then acquired by theDAQ board at a sampling frequency of 1 kHz and analyzedthrough the LabVIEW VI. The VI is used to perform basicfiltering, spectral measurement, and data saving to externalfiles for successive postprocessing. In particular, a detrend isperformed on the voltage signal to compensate for the offsetand the time drift.
Two different experiments are devised to study theperformance of the vibrating IPMC as an energy harvester. Inthe first experiment, the IPMC is shunted with a resistor R�;in the second experiment, the short circuit current through theIPMC is measured. The value of the shunting resistance isselected in the broad range 1 �–1 M� to study the influenceof the external load conditions on the IPMC power output.Open circuit conditions are also simulated in the experiment.On the other hand, the short circuit current characterization isperformed by connecting the electric output from the IPMC toa current amplifier. This device comprises a TL082 operationalamplifier in inverting configuration. On the feedback branch,a variable feedback resistance is carefully calibrated witha known current input to obtain a desired voltage/currentgain. In particular, the feedback resistor is calibrated toapproximately 1 k� to yield a gain of 1 V/1 mA. Furthermore,the electrical characteristics of the IPMC sample, namelyresistance R and capacitance C, are identified from the IPMCstep input response by following the experimental proceduredescribed in [63].
Vibration measurement for dynamic characterizationof the IPMC strip is performed through image analysistechniques. The experimental setup is similar to the onedescribed in [54]. A high speed DEL Imaging Y-Series 3camera is set facing the thickness plane of the vibrating IPMCto record several periods of transverse motion. The capturefrequency of the camera is set to 500 Hz and approximately2000 images are acquired. The sampling frequency is keptconstant and is selected to minimize aliasing and spectralleakage effects on the full range of base excitation frequencies,which is in turn chosen to induce bending of the IPMC stripprimarily about its first and second mode shape. The time-traces of the absolute transverse displacement of the clampedend and of the tip of the IPMC are obtained through imageanalysis, performed in Xcitex ProAnalyst.
5.2. Results
A free vibration experiment is performed in air on thecantilevered IPMC strip to determine the bending stiffness and
Figure 4. Time-trace of the IPMC tip transverse motion, in the freein vacuum vibration experiment.
the in vacuum structural damping. The IPMC strip is releasedfrom a deformed configuration and the transverse motion ofthe tip δ(t) is measured with the image acquisition systemdescribed above, see figure 4. We note that such an experimentwould generally overestimate the structural damping due to theair viscosity.
From the time-trace of the tip displacement, we identifythe undamped in vacuum fundamental natural frequency ω1 =78.54 rad s−1 and the in vacuum loss factor η = 0.14,see [79]. Therefore, by using (24), the IPMC samplebending stiffness is identified to be approximately KM =680 × 10−9 N m2. The IPMC stiffness and mass density arefrequently expressed in terms of the effective mass densityper unit IPMC volume �eff and the effective Young’s modulusEeff, see for example [37, 45, 65, 81]. For this sample,these parameters are computed by considering a uniform crosssection area equal to b×2h, that is, by neglecting the thicknessd of the plating metal layers and the laminated structure ofthe material. We obtain �eff = 3000 kg m−3 and Eeff =176 MPa. These parameters are consistent with data reportedin the literature on IPMCs, see for example [37, 45, 65, 81].
Figure 5(a) shows the theoretical predictions of (26a)compared with experimental results on base excitation forunderwater vibration. We use a reduced order model HδW (ω)
where only the first four vibration modes of the strip are takeninto account. We focus on the first two resonances, the thirdone being well beyond the range of frequencies explored inthe experimental campaign. The effect of the encompassingfluid is included in the function γ (ω) which is implementedwith the following parameters in (18c): �f = 1000 kg m−3,μ = 10−3 Pa s, a1 = 1.0553, a2 = 3.7997, a3 = 3.8018,and a4 = 2.7364, as proposed in [75]. The underwater lossfactor in (19) is η = 0.55 and is identified by matching theexperimental data with the theoretical predictions. The firsttwo underwater natural frequencies are approximately locatedat ω1 = 29.34 rad s and ω2 = 141.53 rad s.
The model is able to accurately capture the magnitudeand the phase of the transfer function HδW (ω) for low tomoderately high frequencies. Discrepancies in the highfrequency region of the phase diagram may be attributed to
8

Smart Mater. Struct. 19 (2010) 015003 M Aureli et al
Figure 5. (a) Theoretical transfer function HδW (ω) compared with experimental results and (b) theoretical transfer function HϑW (ω). Themagnitude scale has been chosen in rad mm−1. Solid lines represent theoretical predictions and points indicate experimental data.
noise amplification due to the indirect nature of the relativetip displacement measurements. The identified parametersallow for direct estimation of the transfer function HϑW (ω),whose behavior is shown in figure 5(b). This transferfunction provides a quantitative relation between the harmoniccharacteristics of the base excitation and the mechanicaldeformation of the sample.
We note that in the broad range 4–100 Hz, that is, in theregion comprised between the first and the third underwaterresonant peak, the magnitude of the transfer function HθW (ω)
varies in the rather limited range 0.1–0.3 rad mm−1. This hintsthat energy harvesting, see also (10a)–(10c), and (31a), maybe possible in a variety of loading conditions that are typicallypresent in underwater systems, such as wave slamming [82]and structural vibrations [83].
The electric parameters of the IPMC sample areidentified from the discharge experiment described above.The experiment is performed under blocked displacementconditions to discard the mechano-electric coupling in (15).These conditions are enforced by fixing a relatively largemass (approximately 30 g) at the tip of the cantilever IPMCstrip during the test. Figure 6 shows the response of thesample to a step voltage input. The time-trace of the responseis fitted with an exponential law stemming from the linearRC circuit approximation in (33a). This procedure allowsto identify the resistance R and the capacitance C of thesample. The identified numerical values for the parameters areapproximately R = 55.2 � and C = 0.51 mF. These valuesare in line with available experimental data on IPMC electricresponse, see for example [40, 45, 46, 65, 66].3 We remark that,in the identification process, we assume that the clamped lengthof the IPMC sample is small with respect to its free lengthL. Therefore, the identified capacitance C well approximatesthe capacitance of the sole free length of the IPMC strip, asconsidered in the proposed formulation.
The analysis of the sensor behavior of the IPMCsample is performed by measuring the open circuit voltageproduced for an assigned base excitation. Figure 7(a)
3 Note that in [46], due to an unfortunate typo, the SI unit of the capacitanceis written as C rather than F.
Figure 6. Step voltage input response of the IPMC sample. Theamplitude of the step is V0 = 10 mV. Solid black line representsexperimental data. Dashed red line represents the fitted model(V0/R) exp (−t/T ).
shows a representative open circuit voltage output for thesample excited approximately in correspondence of its firstunderwater resonance frequency at 4 Hz. The voltage outputis superimposed to the base excitation and to the relativestrip tip displacement. In addition, figure 7(b) provides theunilateral FFT magnitude spectrum for the proposed case. Asshown in figure 7(b), the signal exhibits a dominant peakin correspondence to the excitation frequency and a minorpeak at its second harmonic 8 Hz. The spurious peak at60 Hz is due to residual AC coupling from the power grid.Nonlinearities in the IPMC electrical response may be dueto nonlinearities in the mechanical vibrations. The IPMCsensor frequency response is shown in figure 8(a), whichcompares theoretical predictions from (29) with experimentalresults. More specifically, in (29), we use the simplifiedformulation for the functions α(ω) and β(ω) proposed in (32a)and (32b) along with the experimentally identified constantB = 2.286 × 10−9 A s2 rad
−1. This value for the mechano-
electric coupling B is in good agreement with the values B =2.77 × 10−9 A s2 rad
−1and B = 0.93 × 10−9 A s2 rad
−1,
obtained from the sets of effective constants (εr = 2.123×108,D = 3.32 × 10−11 m2 s) and (εr = 2.123 × 108, D =
9

Smart Mater. Struct. 19 (2010) 015003 M Aureli et al
Figure 7. (a) Time-trace and (b) unilateral FFT magnitude spectrum of the open circuit voltage output from the IPMC sample excited withbase motion at 4 Hz.
Figure 8. Comparison between the theoretical and experimental frequency responses of the IPMC strip under (a) open circuit voltage and(b) short circuit current conditions. Solid lines represent theoretical predictions and points indicate experimental data.
1.030 × 10−10 m2 s) reported in [39] and in [56], respectively,for IPMCs neutralized with sodium counterions. In addition,the presented experimental data are obtained by extracting thefundamental harmonic component of the voltage signal foreach analyzed frequency. The obtained harmonic componentis then normalized by the base displacement amplitude, that isdetermined by using the output from the laser displacementsensor. The same procedure is used to extract the voltageoutput when the IPMC strip is shunted with a resistor.
The short circuit current output over the whole rangeof frequencies explored is presented in figure 8(b), wherethe experimental data are superimposed to the theoreticalprediction of (30). In addition, the short circuit current outputprovides a means to validate the identified parameters R, C,and B in (32a) and (32b) describing the electrical behavior ofthe IPMC with an independent set of measurements. Figures 8(a) and (b) show a good agreement between experimental dataand model predictions.
Further, we determine the power harvested from the IPMCunderwater vibration under loaded conditions by using (31a)with the parameters discussed above. The influence of thevibration frequency and the electrical load on the harvested
power is shown in figure 9. Figure 9 provides a contourmap that allows to identify optimal regions of operation forthe harvesting device. More specifically, the harvested powervaries in the range 10−20–10−8 W mm−2 and significantlyincreases when the actuation frequency increases. In particular,the maxima of the harvested power occur when the actuationfrequency matches the underwater resonance frequencies of thevibrating IPMC. In addition, the power output is maximizedwhen the resistive load is in the range 10–100 �, that isconsistent with the predictions of the approximate suboptimalsolution in (34a) and the experimental findings on the IPMCelectric discharge, see (35b).
Figure 10(a) shows a comparison between experimentalresults and theoretical predictions of power harvested versusinput frequency. Curves in figure 10(a) show the trendsof the harvested power with respect to the base excitationfrequency and are parameterized with respect to the loadresistance R� over the broad range 1 �–1 M�. In addition,figure 10(b) shows the dependence of the output power onthe load resistance along with the existence of a maximumin correspondence to a shunting resistance in the range10–100 �. The harvested power is computed from the voltagemeasurements by using (31a).
10

Smart Mater. Struct. 19 (2010) 015003 M Aureli et al
Figure 9. Theoretical harvested power from IPMC underwatervibration.
5.3. Remarks
A qualitative depiction of the counterion concentration inresponse to an applied voltage or a mechanical deformationis obtained by solving for the net concentration χ from (9b) instatic conditions and using the representations in (10a)–(10c).By rearranging the terms, we have
χ(x, y, 0)
c0=
[y
h− sinh (νy/h)
sinh (ν)
]
h∂2w(x, 0)
∂x2
− sinh (νy/h)
sinh (ν)
V (0)
Vth, (36)
where we used (11) and ν = h/λ. Equation (36) showsthat the net concentration profile is the summation of twoqualitatively different terms. The first summand is linearlyproportional to the maximum strain in the IPMC polymerregion h∂2w/∂x2, linearly increases with the y coordinatein the bulk polymer region, and abruptly goes to zero atthe polymer electrode interface. The second summand islinearly proportional to the applied voltage V , is approximatelyzero in the bulk polymer region, and sharply increases
in the proximity of the polymer electrode interface. Thespatial extent of the rapid changes of these two summandsis given by the Debye screening length λ. Therefore, chargeredistribution in the bulk polymer region is primarily dictatedby mechanical deformations, while the voltage differenceacross the electrodes drives the localization of charge profilesat the polymer electrode interfaces. The presence of roughelectrode surfaces is thus expected to influence these twocontributions differently. More specifically, rough landscapeswould be more important in determining charge storage inthe IPMC due to an applied electric voltage rather than amechanical deformation. This is the practical reason whythe model identification is based on fitting three independentparameters rather than two effective constants, such as εr andD, as generally done in available studies of IPMC electricbehavior, see for example [39, 40, 44, 56, 66].
It has recently been shown that the electrode roughnesseffect can play a significant role in the IPMC capacitance,see for example [62, 63]. In [63], a fractal electrode modelis proposed to explain large capacitance values typicallyfound in literature and a procedure based on the so calledstretched exponential is used to estimate the IPMC capacitance.By following the procedure outlined therein, the estimatedvalue for the IPMC capacitance is approximately equal toC = 0.83 mF. This value is comparable with the simpleexponential fitting adopted in this work, that does not accountfor diffusion phenomena within electrode protrusions in thepolymer region, see for example [84]. Improved impedancematching conditions may be imposed by considering thestretched exponential mode for IPMC discharge.
The form of (26a) and (26b) allows for a simple estimateof the quality factors, see for example [85]. More specifically,a closed-form solution is obtained by setting the function γ (ω)to its value at ωn and computing the poles of (26a) with thecomplex variable ζ in place of iω. For each mode, a pair ofpoles ±ζn is determined with
ζn = ωn
√
−(1 + iη)
1 + γR(ωn)− iγI (ωn). (37)
Figure 10. (a) Comparison between the theoretical and experimental (points) power harvesting capability of the vibrating IPMC.(b) Experimental data on power harvesting as a function of the shunting resistance. The solid line represents theoretical predictions of themodel, see (34a), at the representative frequency of 40 Hz.
11

Smart Mater. Struct. 19 (2010) 015003 M Aureli et al
The quality factors are defined consistently with [85] as Qn =Re[iζn]/(2 Im[iζn]), where Im[•] denotes the imaginary part.Following [85], the quality factor may be written as
Qn � [1/Qγn + 1/Qη
n]−1, (38a)
where Qγn and Qη
n are the quality factors computed byneglecting the structural damping or the fluid damping,respectively. These quantities are given by
Qγn = [1 + γR(ωn)]/γI (ωn), (38b)
Qηn = 1/η. (38c)
We note that (38b) coincides with expression for the qualityfactor identified in [75]. In addition, the quality factor in (38c)is commonly used in the literature for structural damping andis independent of the mode number, see for example [79].Numerical values for the quality factors are Qγ
1 = 7.7, Qγ
2 =16.0, and Qη
1 = Qη
2 = 1.818. By using (38a), the approximateoverall quality factors are Q1 = 1.47 and Q2 = 1.63.We note that the experimentally identified structural dampingdominates the effect of the encompassing fluid. This maybe due to underestimation of the viscous damping from theformulation of [68, 69] that, as discussed earlier, neglectstip effects, finite oscillation, surface roughness, and localcurvature.
The proposed estimate of the harvested power is ratherconservative in nature. Experimental data and theory havebeen deliberately focused on the analysis of a purely harmonicresponse of the system to base excitation. Figure 7 showsthat the system response is not harmonic and that additionalharmonic components may have a significant weight in theoverall power response. To quantify energy harvestingcapabilities from spurious oscillations, we introduce theparameters σV (ω) and σW (ω), defined as
σV (ω) = |V (ω)|2[∫ ∞
0|V (�)|2d�
]−1
,
σW (ω) = |W (ω)|2[∫ ∞
0|W (�)|2d�
]−1
.
(39)
The parameter σV (ω) is a quantitative measure of the harmoniccontent of the voltage signal output from the IPMC. Inaddition, the parameter σW (ω) measures the harmonic contentof the motion of the IPMC base. More specifically, theseparameters approach 1 from below, as the harmonic content ofthe signal at frequencies different than ω approaches 0 and areequal to 1 for monochromatic signals. For practical reasons,the limits of integration at infinity in (39) are replaced with theNyquist frequency, that is, 500 Hz for the signals acquired withthe DAQ board.
Figure 11 shows the quality of the electric and mechanicalsignal in the system over the explored frequency spectrum. Theparameter σW (ω) is close to the maximal value 1 for all thetested frequencies. Nevertheless, when ω = 2π10 rad s−1,the parameter σW (ω) experiences a dip. This phenomenonmay be related to the mechanical characteristics of the shakerand to the interaction with the fluid environment in the
Figure 11. Evaluation of the parameters σ(ω) over the exploredfrequency range. The parameters σ(ω) provide a measure of theharmonic quality of the mechanical and electric signal.
confined tank. On the other hand, the parameter σV (ω) showsvalues significantly less than 1, for a broad range of lowfrequencies. The harmonic quality of the electric signal isrelatively poor below 20 Hz. This hints that the voltage signalis not monochromatic and that deviations from the theoreticalpredictions, especially in the harvested power evaluation, maybe due to the harmonic content of the voltage signal. Inaddition, the experimental dip visible in the neighborhoodof 10 Hz is likely due to the poor performance in the baseexcitation. More specifically, it is experimentally observedthat, in the neighborhood of 10 Hz, the motion of the IPMCbase deviates from a sinusoidal shape and approaches a squarewave, with a considerably large third harmonic component.The third harmonic, approximately at 30 Hz, is close to thesecond underwater resonance frequency of the IPMC. Then,its response with a peak approximately located at 30 Hz causesthe degradation of the parameter σV (ω) and macroscopicdeviations of the experimental results from the theoreticalpredictions.
We note that the low harmonic quality of the voltage signalmay be a desirable feature in energy harvesting applications.More specifically, additional harmonic components maycontribute to the overall harvested power. In addition, asignificant part of the harvested power can be due to continuouscomponent related to drifts in the IPMC response due to thestreaming potentials investigated in [86]. These additionalcontributions could boost the energy harvesting capability tothe order of the microwatt, making the proposed technologysuitable for microscale powering applications. This envisionedorder of magnitude of harvested power appears to be well inline with published results on electrostatic, electromagnetic,and piezoelectric inertial generators of comparable size,see [10] for a synoptic comparison. In addition, IPMCs havethe capability to effectively harvest power over a rather broadrange of frequency, that is typically not ascribed to traditionalinertial generators.
As a concluding remark, we note that for the proposedexperimental activity the issue of repeatability is of mainconcern. Significant differences can arise between differentexperimental sessions, due to IPMC hydration level and
12

Smart Mater. Struct. 19 (2010) 015003 M Aureli et al
counterion concentration, as well as external factors, includingthe oxidization of conducting surfaces. Hence, great careis needed in acquiring acceptable measurements and, froma more general perspective, in developing prototypes forpractical applications, including for example battery chargingsystems, see also [4].
6. Conclusions
In this paper, we analyzed the performance of IPMCs as energyharvesters in fluid environments. We developed a mathematicalmodel for the chemo-mechano-electric response of submergedIPMCs under base excitation. The mechanical vibration of theIPMC strip is described by the Kirchhoff–Love plate theory.The presence of the encompassing fluid medium is modeledusing recent results on atomic force microscope cantilevers.The dynamics of the charge and electric potential in theIPMC domain due to time-varying mechanical deformationsis described using the Poisson–Nernst–Planck model. Wederived a closed-form solution for the power transferred bythe vibrating IPMC to a shunting impedance. We showed thatthe power transfer is maximized when the shunting impedancematches the IPMC impedance, that is well approximated bythe series connection of a resistor and a capacitor, and whenthe frequency of the base excitation matches the resonancefrequencies of the IPMC strip immersed in the fluid.
We validated the modeling and design results throughexperiments on an IPMC strip vibrating in water. Ourexperimental study includes a comprehensive analysis ofIPMC underwater vibration and electric response along witha detailed parametric study of power harvesting for differentshunting resistors. Experiments were conducted in the broadfrequency range of 2–50 Hz, which includes the first tworesonance frequencies of the submerged IPMC, whose nominalsurface area is approximately 1.5 cm2 and whose thicknessis 200 μm. Experimental results show that (i) the presenceof the aqueous environment allows for energy scavengingat considerably low frequencies that are typical of marinesystems; (ii) energy harvesting is optimized when the shuntingresistance matches the internal IPMC resistance that is ofthe order of 10 � and the IPMC vibrates along its secondstructural mode; and (iii) the maximum harvested power isapproximately 1 nW for a base excitation of the order of 1 mm.
Acknowledgments
This research was supported by the National ScienceFoundation under grant CMMI-0745753 and grant CMMI-0926791. The authors wish to thank Ms Weiyang Lin for herhelp with the experiments and Mr Vladislav Kopman for theuseful suggestions on the measurement system.
References
[1] Inman D J and Grisso B L 2006 Towards autonomous sensingSmart Structures and Materials 2006: Sensors and SmartStructures Technologies for Civil, Mechanical, andAerospace Systems (San Diego, CA); Proc. SPIE6174 61740T
[2] Rastegar J, Pereira C and Nguyen H-L 2006Piezoelectric-based power sources for harvesting energyfrom platforms with low-frequency vibration SmartStructures and Materials 2006: Industrial and CommercialApplications of Smart Structures Technologies (San Diego,CA); Proc. SPIE 6171 617101
[3] Leonov V, Torfs T, Fiorini P and Van Hoof C 2007Thermoelectric converters of human warmth forself-powered wireless sensor nodes IEEE Sensors J. 7 650–7
[4] Tiwari R, Kim K J and Kim S M 2008 Ionic polymer–metalcomposite as energy harvesters Smart Mater. Struct. 4549–63
[5] Brufau-Penella J, Puig-Vidal M, Giannone P, Graziani S andStrazzeri S 2008 Characterization of the harvestingcapabilities of an ionic polymer metal composite deviceSmart Mater. Struct. 17 015009
[6] Farinholt K M, Pedrazas N A, Schluneker D M, Burt D W andFarrar C R 2009 An energy harvesting comparison ofpiezoelectric and ionically conductive polymers J. Intell.Mater. Syst. Struct. 20 633–42
[7] Guyomar D, Sebald G, Lefeuvre E and Khodayari A 2009Toward heat energy harvesting using pyroelectric materialJ. Intell. Mater. Syst. Struct. 20 265–71
[8] Mateu L and Moll F 2005 Review of energy harvestingtechniques and applications for microelectronics VLSICircuits and Systems II (Sevilla); Proc. SPIE 5837 359–73
[9] Roundy S 2005 On the effectiveness of vibration-based energyharvesting J. Intell. Mater. Syst. Struct. 16 809–23
[10] Mitcheson P D, Yeatman E M, Rao G K, Holmes A S andGreen T C 2008 Energy harvesting from human andmachine motion for wireless electronic devices Proc. IEEE96 1457–86
[11] Yeatman E M 2009 Energy harvesting: small scale energyproduction from ambient sources Active and Passive SmartStructures and Integrated Systems 2009 (San Diego, CA);Proc. SPIE 7288 728802
[12] Sodano H A, Inman D J and Park G 2004 A review of powerharvesting from vibration using piezoelectric materialsShock Vib. Dig. 36 197–205
[13] Anton S R and Sodano H A 2007 A review of power harvestingusing piezoelectric materials (2003–2006) Smart Mater.Struct. 16 R1–21
[14] Erturk A and Inman D J 2008 A distributed parameterelectromechanical model for cantilevered piezoelectricenergy harvesters Trans. ASME J. Vib. Acoust. 130 041002
[15] Erturk A and Inman D J 2009 An experimentally validatedbimorph cantilever model for piezoelectric energy harvestingfrom base excitations Smart Mater. Struct. 18 025009
[16] Guyomar D, Badel A, Lefeuvre E and Richard C 2005 Towardenergy harvesting using active materials and conversionimprovement by nonlinear processing IEEE Trans. Ultrason.Ferroelectr. Freq. Control 52 584–95
[17] Lefeuvre E, Badel A, Richard C and Guyomar D 2007 Energyharvesting using piezoelectric materials: case of randomvibrations J. Electroceram. 19 349–55
[18] Sodano H A, Inman D J and Park G 2005 Generation andstorage of electricity from harvesting devices J. Intell. Mater.Syst. Struct. 16 67–75
[19] Sodano H A, Inman D J and Park G 2005 Comparison ofpiezoelectric energy harvesting devices for rechargingbatteries J. Intell. Mater. Syst. Struct. 16 799–807
[20] Kauffman J L and Lesieutre G A 2009 A low-order model forthe design of piezoelectric energy harvesting devicesJ. Intell. Mater. Syst. Struct. 20 495–504
[21] Renno J M, Daqaq M F and Inman D J 2009 On the optimalenergy harvesting from a vibration source J. Sound Vib.320 386–405
[22] Wang L and Yuan F G 2008 Vibration energy harvesting bymagnetostrictive material Smart Mater. Struct. 17 045009
13

Smart Mater. Struct. 19 (2010) 015003 M Aureli et al
[23] Sebald G, Pruvost S and Guyomar D 2008 Energy harvestingbased on Ericsson pyroelectric cycles in a relaxorferroelectric ceramic Smart Mater. Struct. 17 015012
[24] Chiba S, Waki M, Kornbluh R and Pelrine R 2008 Innovativepower generators for energy harvesting using electroactivepolymer artificial muscles EAPAD: Electroactive PolymerActuators and Devices 2008 (San Diego, CA); Proc. SPIE6927 692715
[25] Shahinpoor M, Bar-Cohen Y, Simpson J O and Smith J 1998Ionic polymer–metal composites (IPMCs) as biomimeticsensors, actuators and artificial muscles—a review SmartMater. Struct. 7 R15–30
[26] Nemat-Nasser S and Thomas C 2004 Ionomeric Polymer–MetalComposites Electroactive Polymer (EAP) Actuators asArtificial Muscles—Reality, Potential and Challenges(Bellingham, WA: SPIE Optical Engineering Press)chapter 6
[27] Shahinpoor M and Kim K J 2001 Ionic polymer–metalcomposites: I. Fundamentals Smart Mater. Struct.10 819–33
[28] Kim K J and Shahinpoor M 2003 Ionic polymer–metalcomposites: II. Manufacturing techniques Smart Mater.Struct. 12 65–79
[29] Shahinpoor M and Kim K J 2004 Ionic polymer–metalcomposites: III. Modeling and simulation as biomimeticsensors, actuators, transducers, and artificial muscles SmartMater. Struct. 13 1362–88
[30] Shahinpoor M and Kim K J 2005 Ionic polymer–metalcomposites: IV. Industrial and medical applications SmartMater. Struct. 14 197–214
[31] Bonomo C, Fortuna L, Giannone P and Graziani S 2006 Acircuit to model the electrical behavior of an ionicpolymer–metal composite IEEE Trans. Circuits Syst.53 338–50
[32] Bonomo C, Fortuna L, Giannone P, Graziani S andStrazzieri S 2006 A model for ionic polymer metalcomposites as sensors Smart Mater. Struct. 15 749–58
[33] Bonomo C, Fortuna L, Giannone P, Graziani S andStrazzeri S 2007 A nonlinear model for ionic polymer metalcomposites as actuators Smart Mater. Struct. 16 1–12
[34] Gutta S, Lee J S, Trabia M B and Yim W 2009 Modeling ofionic polymer metal composite actuator dynamics using alarge deflection beam model Smart Mater. Struct. 18 115023
[35] Nemat-Nasser S and Li J Y 2000 Electromechanical responseof ionic polymer–metal composites J. Appl. Phys.87 3321–31
[36] Nemat-Nasser S 2002 Micromechanics of actuation of ionicpolymer–metal composites J. Appl. Phys. 92 2899–915
[37] Newbury K and Leo D J 2003 Linear electromechanical modelof ionic polymer transducers—part I: Model developmentJ. Intell. Mater. Syst. Struct. 14 333–42
[38] Wallmersperger T, Kroplin B and Gulch R W 2004 Coupledchemo-electro-mechanical formulation for ionic polymergels-numerical and experimental investigations Mech. Mater.36 411–20
[39] Chen Z, Tan X, Will A and Ziel C 2007 A dynamic model forionic polymer–metal composite sensors Smart Mater. Struct.16 1477–88
[40] Wallmersperger T, Leo D J and Kothera C S 2007 Transportmodeling in ionomeric polymer transducers and itsrelationship to electromechanical coupling J. Appl. Phys.101 024912
[41] Del Bufalo G, Placidi L and Porfiri M 2008 A mixture theoryframework for modeling mechanical actuation of ionicpolymer metal composites Smart Mater. Struct. 17 045010
[42] Jo C, Naguib H E and Kwon R H 2008 Modeling andoptimization of the electromechanical behavior of an ionicpolymer–metal composite Smart Mater. Struct. 17 065022
[43] Porfiri M 2008 Charge dynamics in ionic polymer metalcomposites J. Appl. Phys. 104 104915
[44] Wallmersperger T, Akle B J, Leo D J and Kroplin B 2008Electrochemical response in ionic polymer transducers: anexperimental and theoretical study Compos. Sci. Technol.68 1173–80
[45] Chen Z, Hedgepeth D and Tan X 2009 A nonlinear,control-oriented model for ionic polymer–metal compositeactuators Smart Mater. Struct. 18 055008
[46] Porfiri M 2009 An electromechanical model for sensing andactuation of ionic polymer metal composites Smart Mater.Struct. 18 015016
[47] Akle B J, Bennet M D, Leo D J, Wiles K B and McGrath J E2007 Direct assembly process: a novel fabrication techniquefor large strain ionic polymer transducers J. Mater. Sci.42 7031–41
[48] Akle B J and Leo D J 2008 Single-walled carbonnanotubes–ionic polymer electroactive hybrid transducersJ. Intell. Mater. Syst. Struct. 19 905–15
[49] Kamamichi N, Yamakita M, Asaka K and Luo Z-W 2006 Asnake-like swimming robot using IPMC actuator/sensorProc. 2006 IEEE Int. Conf. on Robotics and Automationpp 1812–7
[50] Mbemmo E, Chen Z, Shatara S and Tan X 2008 Modeling ofbiomimetic robotic fish propelled by an ionic polymer–metalcomposite actuator Proc. 2008 IEEE Int. Conf. on Roboticsand Automation pp 689–94
[51] Abdelnour K, Mancia E, Peterson S D and Porfiri M 2009Hydrodynamics of underwater propulsors based on ionicpolymer metal composites: a numerical study Smart Mater.Struct. 18 085006
[52] Yeom S-W and Oh I-K 2009 A biomimetic jellyfish robot basedon ionic polymer metal composite actuators Smart Mater.Struct. 18 085002
[53] Peterson S D, Porfiri M and Rovardi A 2009 A particle imagevelocimetry study of vibrating ionic polymer metalcomposites in aqueous environments IEEE/ASME Trans.Mechatronics 14 474–83
[54] Aureli M, Kopman V and Porfiri M 2009 Free-locomotion ofunderwater vehicles actuated by ionic polymer metalcomposites IEEE/ASME Trans. Mechatronics accepted forpublication
[55] Shahinpoor M, Bar-Cohen Y, Simpson J O and Smith J 1998Ionic polymer–metal composites (IPMCs) as biomimeticsensors, actuators and artificial muscles—a review SmartMater. Struct. 7 R15–30
[56] Farinholt K and Leo D J 2004 Modelling of electromechanicalcharge sensing in ionic polymer transducers Mech. Mater.36 421–33
[57] Bonomo C, Brunetto P, Fortuna L, Giannone P, Graziani S andStrazzeri S 2008 A tactile sensor for biomedical applicationsbased on IPMCs IEEE Sensors J. 8 1486–93
[58] Bonomo C, Fortuna L, Giannone P, Graziani S andStrazzieri S 2008 A resonant force sensor based on ionicpolymer metal composites Smart Mater. Struct. 17 015014
[59] Fang B-K, Ju M-S and Lin C-C K 2007 A new approach todevelop ionic polymer–metal composites (IPMC) actuator:fabrication and control for active catheter systems SensorsActuators A 137 321–9
[60] Deole U, Lumia R, Shahinpoor M and Bermudez M 2008Design and test of IPMC artificial muscle microgripperJ. Micro-Nano Mechatronics 4 1865–3936
[61] Kruusmaa M, Hunt A, Punning A, Anton M andAabloo A 2008 A linked manipulator with ion-polymermetal composite (IPMC) joints for soft- andmicromanipulation Proc. 2008 IEEE Int. Conf. on Roboticsand Automation pp 3588–93
[62] Porfiri M 2009 Influence of electrode surface roughness andsteric effects on the nonlinear electromechanical behavior ofionic polymer metal composites Phys. Rev. E 79 041503
14

Smart Mater. Struct. 19 (2010) 015003 M Aureli et al
[63] Aureli M, Lin W and Porfiri M 2009 On the capacitance-boostof ionic polymer metal composites due to electroless plating:theory and experiments J. Appl. Phys. 105 104911
[64] Akle B J, Leo D J, Hickner M A and McGrath J E 2005Correlation of capacitance and acuation in ionomericpolymer transducer J. Mater. Sci. 40 3715–24
[65] Chen Z and Tan X 2008 A control-oriented and physics-basedmodel for ionic polymer–metal composite actuatorsIEEE/ASME Trans. Mechatronics 13 519–29
[66] Farinholt K and Leo D J 2008 Modeling the electricalimpedance response of ionic polymer transducers J. Appl.Phys. 104 014512
[67] Mansfield E H 1989 The Bending and Stretching of Plates2nd edn (New York: Cambridge University Press)
[68] Tuck E O 1969 Calculation of unsteady flows due to unsteadymotion of cylinders in a viscous fluid J. Eng. Math. 3 29–44
[69] Sader J E 1998 Frequency response of cantilever beamsimmersed in viscous fluids with applications to the atomicforce microscope J. Appl. Phys. 84 64–76
[70] Theodorakopoulos D D and Beskos D E 1994 Flexuralvibrations of poroelastic plates Acta Mech. 103 191–203
[71] Rajagopal K R and Tao L 1995 Mechanics of Mixtures(River Edge, NJ: World Scientific)
[72] Coussy O 2004 Poromechanics 2nd edn (Hoboken, NJ: Wiley)[73] Bard A J and Faulkner L R 2001 Electrochemical Methods:
Fundamentals and Applications (Hoboken, NJ: Wiley)[74] Kirstein S, Mertesdorf M and Schoenhoff M 1998 The
influence of a viscous fluid on the vibration dynamics ofscanning near-field optical microscopy fiber probes andatomic force microscopy cantilevers J. Appl. Phys.84 1782–90
[75] Maali A, Hurth C, Boisgard R, Jai C, Cohen-Bouhacina T andAime J-P 2005 Hydrodynamics of oscillating atomic forcemicroscopy cantilevers in viscous fluids J. Appl. Phys.97 074907
[76] Basak S, Raman A and Garimella S V 2006 Hydrodynamicloading of microcantilevers vibrating in viscous fluidsJ. Appl. Phys. 99 114906
[77] Brunetto P, Fortuna L, Graziani S and Strazzieri S 2008 Amodel of ionic polymer–metal composite actuators inunderwater operations Smart Mater. Struct. 17 025029
[78] Chon J W M, Mulvaney P and Sader J E 2000 Experimentalvalidation of theoretical models for the frequency responseof atomic force microscope cantilever beams immersed influids J. Appl. Phys. 87 3978–88
[79] Meirovitch L 2001 Fundamentals of Vibrations (New York:McGraw-Hill)
[80] Collins E R 1992 Foundations for Microwave Engineering2nd edn (New York: McGraw-Hill)
[81] Newbury K and Leo D J 2003 Linear electromechanical modelof ionic polymer transducers—part II: experimentalvalidation J. Intell. Mater. Syst. Struct. 14 343–57
[82] Qin Z and Batra R C 2009 Local slamming impact of sandwichcomposite hulls Int. J. Solids Struct. 46 2011–35
[83] Murray R and Rastegar J 2009 Novel two-stagepiezoelectric-based ocean wave energy harvesters formoored or unmoored buoys Active and Passive SmartStructures and Integrated Systems 2009 (San Diego, CA);Proc. SPIE 7288 72880E
[84] Sakaguchi H and Baba R 2007 Electric double layer on fractalelectrodes Phys. Rev. E 75 051502
[85] Nayfeh A H and Younis M I 2004 A new approach to themodeling and simulation of flexible microstructures underthe effect of squeeze-film damping J. Micromech. Microeng.14 170–81
[86] Gao F and Weiland L M 2009 The streaming potential methodfor modeling the electromechanical responses of ionicpolymer transducers Sensors and Smart StructuresTechnologies for Civil, Mechanical, and Aerospace Systems2009 (San Diego, CA); Proc. SPIE 7292 72924H
15
















![Redox-active Ionic Liquids for Energy Harvesting and Storage Applications · electrochemical applications, in particular in “green chemistry” [2–4] in tuning their unique chemical](https://img.pdfslide.net/doc/110x75/5f7b5b1d4a9b5a5065612ead/redox-active-ionic-liquids-for-energy-harvesting-and-storage-applications-electrochemical.jpg)