Embed Size (px)
Citation preview

T222-4-1
Engineering Studies into Vertical Lift Planetary Aerial Vehicles
Larry A. YoungEdwin W. Aiken
Army/NASA Rotorcraft DivisionAmes Research Center
Moffett Field, [email protected]
M.R. DerbyJ.L. Johnson
Aerospace Computing, Inc.Mountain View, CA
J. NavarreteJ. Klem
San Jose State University
R. DemblewskiCollege of San Mateo
J. AndrewsMassachusetts Institute of Technology
R. TorresNew Mexico State University
Abstract
NASA Ames Research Center has been investigating various rotary-wing aeromechanics and proof-of-conceptissues underlying the development of vertical lift aerial vehicles for planetary science missions. Theseengineering studies include: hover performance measurements of an isolated rotor in simulated Mars surfaceatmospheric conditions; radio-controlled coaxial helicopter flight tests supporting the investigation of Marsrotorcraft technologies; small-scale unducted- and ducted-fan hover tests that provide insight into possibleVTOL aircraft for exploration of Titan; hybrid airship proof-of-concept testing that illustrates flight control andforward flight performance issues inherent in airships designed for flight in the atmosphere of Venus.
Introduction
Recent research has focused on the feasibility ofdeveloping vertical lift aerial vehicles that could aidin the exploration of various planetary bodies in oursolar system. Specifically, the utility of vertical liftvehicles to support missions to Mars, Titan (a moonof Saturn), and Venus is being studied.
Achieving vertical flight for Mars, Titan, and Venuswill not be easy to accomplish. Nonetheless, work todate has been promising (Mars: Refs. 1-16; Titan:Refs. 1-4 and 17-20; Venus: Refs. 1-4 and 21).Development of vertical lift planetary aerial vehicleswill be a tremendous engineering undertaking – bothin terms of technical challenge and scientific payoff.
Presented at the AHS International Meeting onAdvanced Rotorcraft Technology and Life SavingActivities, Utsunomiya, Tochigi, Japan, November11-13, 2002.
This paper summarizes ongoing engineering studiesconducted at NASA Ames Research Center intospecific design issues related to vertical lift planetaryaerial vehicles. The discussion will focus on theleading candidate vehicle concepts being studied atNASA Ames. It should not, however, be concludedthat these concepts are the only viable aerial vehiclesfor planetary exploration, let alone the only verticallift vehicle configurations that show promise. Theseare merely baseline concepts that allow the efficientdefinition, prioritization, and conduct of studies ofkey enabling technologies.
A baseline aerial vehicle concept for each of threeplanetary bodies will be briefly discussed. The paperthen discusses ongoing work with regards to rotorand vehicle aeromechanics (ground) testingapplicable to these planetary aerial vehicle conceptsand proof-of-concept flight testing on terrestrial-analog, or surrogate, vehicles.
Atmospheric and physical properties for the threeplanetary bodies for which vertical lift aerial vehiclesare being studied are given in Table 1.

T222-4-2
Table 1–Planetary Description (Ref. 22)
MeanRadius(km)
Gravity(m/s2)
MeanSurfaceAtmos.Temp.(o K)
MeanSurfaceAtmos.Pressure
(Pa)
MeanSurfaceAtmos.Density(kg/m3)
Atmos.Gases
Mars 3390 3.71 214 636 1.55x10-2CO295%
N2 2.7%Ar 1.6%O2 0.1%
Titan 2575 1.354 94 149,526 5.55N2 65-
98%Ar<25%CH4 2-
10%
Venus 6052 8.87 735.3 9.21x106 64.79CO296%
N2 3.5%
Mars Rotorcraft
Researchers at NASA Ames have been studying thedesign issues for Martian autonomous rotorcraft forthe past several years. Several conceptual designstudies of Martian autonomous rotorcraft – and othervertical lift planetary aerial vehicles -- have beenconducted and reported by Ames and otherresearchers (Refs. 1-16).
The Martian atmosphere is 95% CO2 with theremaining 5% comprised of N2 and other trace gases(refer to Table 1). Mars’ gravity is slightly greaterthan a third of Earth’s. The atmosphere of Mars isextremely cold and thin (approximately 1% ofEarth’s sea-level atmospheric density). Further, aseasonal variation of approximately 20% of theplanetary atmospheric mass occurs on Mars (aconsequence of polar CO2 condensation andsublimation). Given the thin, carbon-dioxide-basedMartian atmosphere, developing a rotary-wing designis very challenging.
Concept Definition and Analysis
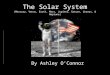
From an aeromechanics perspective, Mars rotorcraftwill be very different from their terrestrialcounterparts. Martian autonomous rotorcraft willhave very large lifting-surfaces and will be requiredto have ultra-lightweight construction (Fig. 1).Further, rotors for flight in the atmosphere of Marswill operate with a unique combination of lowReynolds number and compressible flowaerodynamics.
(Disk Loading = 4 N/m^2)
0
500
1000
1500
2000
2500
3000
3500
5 10 15 20 25 30
Vehicle Mass (kg)
Rot
or S
haft
Pow
er
(Wat
ts)
0
0.5
1
1.5
2
2.5
3
3.5
Rot
or R
adii
(m)
Power (Hover Figure of Merit = 0.4)
Rotor Radius
Fig. 1 – Sizing Trend for Mars Rotors
Conceptual design work to date has examinedtiltrotor, quad-rotor, and coaxial helicopterconfigurations for Mars exploration. Both electricpropulsion (batteries or fuel cells) and Akkermanhydrazine (mono-propellant) reciprocating engineshave been examined for propulsion for these notionalvehicles. Tiltrotor configurations would seem to be alonger-term candidate for Mars exploration ascompared to the other two vehicle configurations as aconsequence of the increased difficulties of thedeploying a tiltrotor on the Mars surface (or mid-airdescent). Electric propulsion appears to be a likelynear-term candidate for Mars vertical lift vehiclesbecause of comparative reliability, technologymaturity, and environmental safety (hydrazine is atoxic substance that has to be carefully handled).
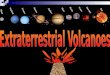
Currently, both coaxial and quad-rotor configurations– using electric propulsion and regenerative fuel-celltechnology – continue to be seriously examined forNASA Mars Exploration and Mars Scout programs(Fig. 2).
Fig. 2 – Mars Coaxial Helicopter
Additional supplemental discussion regarding theMars rotorcraft mission architectures and challengesare given in Appendix C, along with similardiscussion related to Titan and Venus vertical liftaerial vehicles. The focus of the paper now turns tospecific engineering studies into Mars rotorcraftaeromechanics and terrestrial surrogate vehicle flightcharacteristics.

T222-4-3
Rotor/Vehicle Aeromechanics Testing
Isolated rotor hover testing (Ref. 15) has beenconducted in a large NASA Ames environmentalchamber that can be reduced to atmospheric pressuresand densities representative of the martianatmosphere. This requires the rotor airfoils to operateat very low Reynolds numbers and in compressibleflow conditions.
A hover test stand and a baseline proof-of-conceptrotor were fabricated and tested in the largeenvironmental chamber. An advantage of rotorcraft,versus any other aerial vehicle proposed for Marsexploration, is the ability to conduct testing inexisting ground-test facilities.
In conducting the experimental investigations, it wasnecessary to develop a ‘baseline’ proof-of-conceptrotor. The baseline rotor is discussed in detail inRef. 15. Figure 3 is a picture of the baseline proof-of-concept Mars rotor on its isolated rotor hover teststand. This four-bladed, 2.44 meter diameter rotor isapproximately sized for a 10 kg coaxial Marshelicopter. The rotor geometric solidity is 0.191.The blade root cut-out is 40% of the rotor radius (soas to better simulate the blade folding, and perhapstelescoping, required for vehicle storage/transport).The blade outboard airfoil fairing is of constant chord(0.305 meter). This proof-of-concept rotor is a not anoptimized design. The basic rotor constructionapproach, though, does emphasize the ultra-lightweight structures required for Mars rotorcraft.The baseline rotor was constructed of foam airfoilfairing and graphite epoxy composite spars andleading-edge caps. Details can be found in Ref. 15.Future generation Mars rotors will yield furtherimprovements in weight and robustness, as well asimproved dynamic tuning for forward-flight testing.
Fig. 3 – Baseline Proof-of-Concept Mars Rotor andHover Test Stand
The baseline Mars proof-of-concept rotor uses anEppler 387 airfoil for its constant chord outboard
blade sections. (The inboard blade spar for the bladeroot cut-out is a circular graphite epoxy tube with aflat-plate chordwise stiffener.) The Eppler 387 is byno means an optimized airfoil for Mars rotorapplications. A number of researchers are currentlydeveloping advanced airfoils for operating in the low-Reynolds number, compressible flow regime. Theseadvanced airfoils will not only have potentialapplication for Mars rotorcraft, but also to high-altitude long-endurance (HALE) aircraft and microair vehicles. The Eppler 387 is, though, a well-documented low Reynolds airfoil and was chosen forthat reason for the baseline Mars proof-of-conceptrotor.
Isolated rotor performance results are shown in Figs.4-7. Thrust versus power, thrust versus collective,and figure of merit curves for a variety of tip Machand Reynolds numbers are presented. Details as tothe methodology employed to estimate rotor shaftpower is given in Appendix A. All data presented isshown with rotating bare shaft tares (but no hubtares) applied. The rotor performance data wereacquired in air (versus carbon-dioxide) at a reducedatmospheric density of 1.24x10-2 kg/m3
(approximately 80% of the “mean” Mars surfaceatmospheric density).
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0 0.005 0.01 0.015 0.02
Rotor Thrust Coefficient, CT
Rot
or F
igur
e of
Mer
it, F
M
M_Tip = 0.4 & Re_Tip =23,500
M_Tip = 0.45 & Re_Tip =27,000
M_Tip = 0.49 & Re_Tip =30,000
Fig. 4 – Mars Baseline Rotor Figure of Merit Curve(Bare Shaft Tare Applied; No Hub Tare)
Preliminary rotor thrust versus collective data for theMars baseline rotor was presented in Ref. 15.Updated information, including rotor shaft powermeasurements and an improved viscosity equation toestimate tip Reynolds numbers, is included in Figs. 4-7. An initial attempt to predict the Mars baselinerotor hover performance characteristics waspresented in Ref. 16. Significant disagreements arefound between the experimental data and the

T222-4-4
computational fluid dynamic (CFD) predictions.This is, in part, due to the fact that the design targettip Mach and Reynolds number conditions used inthe CFD predictions (MTip=0.65 and ReTip=54,000)could not be matched in the baseline rotor hover test(the closest matching experimental conditions beingMTip=0.49 and ReTip=30,000). This was primarilybecause the environmental chamber did not have ameans to reduce the temperature of the chamber’sworking gas down to Mars-like levels, even thoughthe target atmospheric densities could be achieved.Hopefully future work will reconcile the CFD andexperimental results. The figure of merit resultsshown in Fig. 4 do not reveal the maximum figure ofmerit attainable for the Mars baseline rotor. This willalso have to be established in future testing.
0
0.001
0.002
0.003
0.004
0.005
0.006
-0.01 -0.005 0 0.005 0.01 0.015 0.02
Rotor Thrust Coefficient, CT
Rot
or P
ower
Coe
ffic
ient
, CP
M_Tip = 0.4 & Re_Tip =23,500
M_Tip = 0.45 & Re_Tip =27,000
M_Tip = 0.49 & Re_Tip =30,000
Fig. 5 – Thrust and Power Polar
0
0.001
0.002
0.003
0.004
0.005
0.006
0 0.0002 0.0004 0.0006 0.0008 0.001 0.0012 0.0014 0.0016
SQRT(CT^3/2)
CP
M_Tip = 0.40 & Re_Tip =23,500
M_Tip = 0.45 & Re_Tip =27,000
M_Tip = 0.49 & Re_Tip =30,000
Fig. 6 – Measured Power Coefficient Trend withRespect to Ideal Power, 2C3
T
The effect of Reynolds number and/or tip Machnumber can clearly be seen in the power polar datashown in Figs. 5-6. These particular combinationsof Reynolds and Mach number seem to affect boththe rotor mean profile drag coefficient, as well aspotentially affecting the induced power constant.The Eppler 387 airfoil can exhibit highly nonlinearsectional lift/drag behavior at low Reynolds numbers,which is a result of the formation of leading-edgelaminar separation bubbles (Ref. 23). The observedrotor tip Reynolds number aerodynamic sensitivity isnot unduly surprising in this context. Unfortunately,insufficient rotor data exists to make a moredefinitive assessment of these Reynolds/Machnumber effects. Future testing will be required.
Fairly high values of rotor profile power are seen inFig. 5. The rotor profile power is significantlyinfluenced by the sectional drag coefficientcharacteristics of the circular cylinder (withchordwise flat-plate stiffener) inboard blade spars.
-0.005
0
0.005
0.01
0.015
0.02
0 5 10 15
Collective (Deg.)
CT
M_Tip = 0.4 & Re_Tip =23,500
M_Tip = 0.45 & Re_Tip =27,000
M_Tip = 0.49 & Re_Tip =30,000
Fig. 7 -- Thrust Coefficient versus Collective
The rotor collective angles in Fig. 7 have beencorrected to adjust for control system hysteresis thatwas observed in the Ref. 15 preliminary presentationof test results. Good agreement is now found to existbetween the thrust versus collective curves after theapplied corrections.
Terrestrial-Analog Testing
It is essential that not only are the aeromechanics ofrotors and vehicles in simulated Martianenvironments are studied during the early stages ofthe concept development, but it is also necessary toperform terrestrial-analog demonstrations of theflight and mission characteristics of such vehicles.
A low-cost approach was taken in developing acoaxial helicopter flight demonstrator for terrestrial-analog studies (Fig. 8). Such vehicles are designated

T222-4-5
as Terrestrial-Analog Mars Scouts (TAMS). A seriesof such vehicles is being developed. The TAMSvehicles are constructed primarily out of radio-controlled electric helicopter models.
(a)
(b)
Fig. 8 – Terrestrial-Analog (TAMS) FlightDemonstrator (a) on the ground and (b) in flight
The aerial survey potential for rotorcraft for Marsexploration is self-evident -- terrestrial rotorcrafthave been used for this purpose from their earliestinception. But using rotorcraft as mobile ‘sampling’devices to find, acquire, and return to lander-basedin-situ analysis equipment will also be required forrotorcraft acting as ‘Mars Scouts.’ How rotorcraftmight be adapted and used for soil/rock samplingmissions is still being defined/assessed. As a part ofthat assessment a second TAMS vehicle has beendeveloped that employs various types of roboticactuators and effectors to validate the utility of suchdevices in representative mission scenarios (Fig. 9).
Fig. 9 – Rock/Soil Sampling from a RoboticHelicopter
Titan Ducted-Fan VTOL Aircraft
Table 1 describes the general atmosphericcharacteristics of Titan, a moon of Saturn. Titan isthe only moon in the Solar system that has asubstantial atmosphere (Refs. 22 and 24). Severaltypes of rotorcraft, or powered lift vehicles, could bedeveloped for aerial exploration of Titan. Suchvehicles will likely have electric propulsion drivingtheir rotors or fans.
Concept Definition and Analysis
Ducted fan configurations such as tilt-nacelle aircraftare perhaps ideally suited for Titan (Fig. 10). Ductedfan aerial vehicles would inherently be more robustduring take-off or landing in an unknown, potentiallyhazardous, environment as compared to conventionalrotors. Figure 11 shows orthogonal views of anotional Titan vertical take-off and landing (VTOL)aerial vehicle.
(a)
(b)
Fig. 10 -- A Titan Tilt-Nacelle VTOL: (a) take-offand (b) cruise (Background Image Courtesy of the ESA)
Figure 12 shows a first-order estimate of hover totalshaft power for a notional Titan tilt-nacelle VTOLvehicle having two ducted fans that can pivot at thewing tips (similar in configuration to the Doak VZ-4). A shroud thrust fraction of 0.3 (i.e., 30% of thetotal thrust is provided by the duct/nacelleaerodynamics in hover) is used in the hoverperformance estimate. A figure of merit of 0.62including the shroud thrust contribution is estimatedfor the Titan ducted fan vehicle. The hoverperformance and fan sizing estimates are for a diskloading of 600 N/m2, a fan blade tip Mach number of0.7, and a fan blade solidity of 0.25. A TitanVTOL’s ducted fans will be very small and consume

T222-4-6
very little power as a result of the high atmosphericdensity and low gravity field for Titan.
Fig. 11 – Orthogonal View of a Titan VTOL Concept
The mission concept being studied would employ alander-based architecture where small ducted fan tilt-nacelle vertical take-off and landing aircraft coulduse the lander as a primary base site. The landerwould service and support (including battery/fuel-cellrecharging) the vertical lift aerial vehicles.
0
100
200
300
400
500
600
700
10 20 30 40 50
Vehicle Mass, kg
Tota
l Sha
ft Po
wer
(Bot
h D
ucte
d Fa
ns),
Wat
ts
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
Fan
Bla
de R
adiu
s, m
Hover PowerFan Blade Radius
Fig. 12 – Ducted Fan Hover Performance for TitanVehicle
Rotor/Vehicle Aeromechanics Testing
There has been a recent modest resurgence ofresearch into ducted-fan VTOL vehicles at NASAAmes (for example, Ref. 25). The Titan VTOLresearch derives significant leveraging ofcomplementary personal transport vertical lift vehicleand terrestrial UAV work ongoing within NASAAmes.
One the key assumptions of the Titan VTOL sizingstudies done to date (Refs. 3, 4, and 17) is that
substantial levels of lift augmentation can begenerated by the fan ducts themselves. This thrustcontribution is known as the shroud thrust fractionand can be much as 30 to 40% of the total vehicle liftin hover (Refs. 26-38). Hover testing of small-scaleducted fans/rotors was conducted in support of theTitan VTOL research (Fig. 13). The focus of theresearch was on ducted fans incorporating coaxialrotors which present several potential advantages,including propulsor compactness.
Fig. 13 – Coaxial Ducted Fan Hover Testing
Both unducted and ducted coaxial fan tests wereconducted. The rotors used in the hover testing werederived from radio-controlled model helicopterhardware components. The rotors were two-bladed,had tapered planforms, used circular-arc flat-plateairfoils, and had a geometric solidity (per rotor) of0.091. The rotors were also fixed-pitch, with verylow bending/torsional stiffness. Rotor thrust wasvaried solely by speed control variations. Details ofthe data analysis methodology used in the hovertesting are summarized in Appendix B.
To establish benchmark unducted fan performance,isolated rotor and unducted coaxial and tandem rotorperformance measurements were made and comparedto simple momentum theory predictions (Refs. 40-41). A simple approximate vortex theory is alsoderived and summarized in Appendix D. Figure 14a-b shows the comparison of induced power betweentheory and experimental results for coaxial rotors fora number of vertical separation distances. Thecoaxial rotor induced power ratio experimentalresults are shown both uncorrected and corrected forrotor load share imbalance (the thrust of one rotor isnot exactly equal to that of the other) is shown in Fig14a. The correction methodology for rotor load shareimbalance is detailed in Appendix B. Only rotor loadshare corrections have been made in Fig. 14a-b. Noload share corrections are made to the rest of the datapresented in the paper. The experimental results arerelatively constant with respect to the vertical rotorseparation distance. This relatively flat profile ofinduced power ratio with respect to isolated rotorinduced power has been observed by otherresearchers (Ref. 42). Figure 14b shows theexperimental results to roughly fall within, or close

T222-4-7
to, the induced power momentum theory limits of411PP I .→ for very small vertical separation
distances and 281PP I .→ for large h/R values (Ref.40). Figure 14b also compares the correctedexperimental results to predictions from a simpleapproximate vortex theory model. Predictions fromthis vortex theory model agree quite well withexperimental results.
Figure 15 shows similar results for unducted tandemrotors. In general there is good agreement betweentheory (for small vertical separation distances) andexperimental results except for the extreme points ofthe longitudinal rotor separation distances, s/R. Theunducted tandem rotor momentum theory employedin Fig. 15 is from Ref. 40. Note that s/R = 0 is theuncorrected (with respect to rotor load shareimbalance) coaxial rotor data. The unducted tandemrotor results will find application later in the paper indiscussing elliptical/oval ducted fan configurationsstudied.
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
0 0.2 0.4 0.6 0.8 1 1.2
Vertical Rotor Separation, h/R
Rat
io o
f Mea
n R
otor
Indu
ced
Pow
er to
Isol
ated
Rot
or In
duce
d Po
wer
Uncorrected, Assumes Balanced Load ShareSeries2Corrected for Load Share ImbalanceSeries4
(a)
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
0 0.2 0.4 0.6 0.8 1 1.2
Vertical Rotor Separation, h/R
Rat
io o
f Mea
n C
oaxi
al R
otor
Indu
ced
Pow
er to
Isol
ated
Rot
or In
duce
d Po
wer
, Cor
rect
ed fo
r L
oad
Shar
e Im
bala
nce
Experimental Data, Corrected for Load Share Imbalance
Momentum Theory Limit -- Small h/R
Momentum Theory Limit -- Large h/R
Vortex Theory
(b)
Fig. 14 – Unducted Coaxial Rotor (Induced Power)Performance: (a) Uncorrected and Corrected
Experimental Results and (b) Momentum and VortexTheory Predictions
0.6
0.7
0.8
0.9
1
1.1
1.2
1.3
1.4
1.5
0 0.5 1 1.5 2 2.5Longitudinal Rotor Separation, s/R
Rat
io o
f Mea
n R
otor
Indu
ced
Pow
er w
ith Is
olat
ed R
otor
Indu
ced
Pow
er
Momentum Theory (for Small h/R)Experimental Data
Fig. 15 – Unducted Tandem Rotor (Induced Power)Performance with Respect to an Isolated Rotor at
Constant Thrust (h/R = 0.29)
The circular ducted fan hover testing was conductedwith very simple ducts made of a thin layer ofgraphite epoxy composite. The duct depth was 12.4cm; the diameter of duct inlet, including the lip edge,was 40 cm; the radii of the curved portion of the ductlip was 3.175 cm (the front face of the duct lip wasflat); the duct inner diameter was 30 cm. The tipclearance between the rotors and duct inner liningwas 3.5% of the rotor radii – a fairly large clearancefor ducted fans. The rotors were always centered inthe duct when parametrically varying the rotor-to-rotor vertical spacing – i.e. the rotor hubs werealways spaced equidistant from a point halfway alongthe duct axis.
Despite a simple duct design and construction (reallyonly feasible for the type of low Reynolds numbertesting conducted), exceptionally good results wereachieved for the circular ducted fan configurations.Figure 16 shows that the circular ducted fans testedhad shroud thrust fractions ranging from 1.1 to 1.4depending on the rotor to rotor vertical spacing in theduct. This result compares nicely with similarresults in the literature for VTOL ducted fan vehicles.Nonetheless, these are not optimized ducted-fanconfigurations. For example, tuft flow visualizationreveals that there is separated flow along the interiorof the duct wall between the two rotors for the h/R=0.45 configuration – and so there is plenty ofopportunity for improvements. Further, the simpleducts tested are acceptable for hover but need to beimproved for transition and cruise forward flight. (Ashroud thrust fraction of 1.3 was used to generate theFig. 12 Titan VTOL performance estimates.)

T222-4-8
00.20.40.60.8
11.21.41.6
0 0.2 0.4 0.6 0.8
Vertical Rotor Separation, h/R
Rat
io o
f Duc
ted
Fan
Thr
ust t
o U
nduc
ted
Fan
Thr
ust (
Con
stan
t Po
wer
)
Fig. 16 – Circular Ducted Fan Lift/ThrustAugmentation (Constant Power)
Figure 17a-b compares circular ducted fanperformance against isolated rotor performance.Circular ducted fan lift/thrust augmentation has twocomponents. First, there is in general an increase inmean thrust, TDF/TI > 1, (where TDF is total thrust forthe ducted fan divided by a factor two) due to suctionpressure across the inlet lip of the duct as flow isentrained into it. Second, there is a power reduction,PDF/PI < 1, (where PDF is total power for the ductedfan divided by a factor two) due to beneficialinteraction of the rotors with the duct walls.
0
0.2
0.4
0.6
0.8
1
1.2
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
Vertical Rotor Separation, h/R
Rat
io o
f Duc
ted
Fan
Thr
ust t
o Is
olat
ed R
otor
Thr
ust
(a)
0
0.2
0.4
0.6
0.8
1
1.2
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
Vertical Rotor Separation, h/R
Rat
io o
f Duc
ted
Fan
Pow
er to
Isol
ated
R
otor
Pow
er
(b)
Fig. 17 – Circular Ducted Fan Performance (a) thrustratio at constant speed/collective and (b) power ratio
at constant thrust
Work has also been performed on the aerodynamicperformance characteristics of an “elliptical duct-fan”-- or more correctly an oval ducted fan -- vehicleconcept (Fig. 18). A coaxial ducted-fan vehicle canbe thought of as a special case, s/R=0, of the moregeneral “elliptical duct” vehicle configuration (Fig.19a-b). One of the more difficult challenges ofdeveloping a VTOL aircraft is defining a simple, butextremely robust, flight control system for suchvertical lift vehicles. Quad-rotor, or propulsor,concepts provide exceptional flight controlcharacteristics but suffer from complexity andaerodynamic performance issues, whether it is inhover, transition, or cruise forward-flight. The“elliptical duct” VTOL concept offers the promise ofsimple speed control of four rotors/fans for aircraftroll and pitch trim, while retaining relatively goodaerodynamic performance characteristics. Ifvalidated, the “elliptical duct” VTOL could beapplicable to both micro-rotorcraft and planetaryaerial vehicle applications. The work described inthis paper is the first initial steps in evaluating themerits of this vertical lift vehicle concept.
Fig 18 – Elliptical Ducted-Fan Vehicle Configuration
A significant effort was expended to examine the keyparametric influences of rotor/fan longitudinal andvertical separation distances (s/R and h/R) on rotorperformance for both the unducted and ductedrotors/fans (Figs. 20a-b and 22). Details of theexperimental apparatus and the performance datareduction are provided in Appendix B.
(a)
(b)
Fig. 19 -- Elliptical/Oval Duct Fan Layout– (a) ductinterior and (b) cross-sectional view
With respect to Fig. 20a-b, the behavior of theunducted fan “tandem” rotor data is consistent ingeneral with expectations: a net mean thrust loss is

T222-4-9
seen for tandem rotors compared to isolated rotors,and, further, mean rotor power increases with respectto isolated rotor levels as the (both vertical andlongitudinal) separation distance is reduced. Thereare some surprising observed behaviors as s/Rapproaches zero, or is greater than 1.3. Note againthat s/R=0 data are the coaxial rotor cases.
0
0.2
0.4
0.6
0.8
1
1.2
0 0.5 1 1.5 2 2.5Longitudinal Rotor Separation, s/R
Rat
io o
f Mea
n R
otor
Thr
ust
to Is
olat
ed R
otor
Thr
ust
h/R = 0.62h/R = 0.2h/R = 0.29h/R = 0.45
(a)
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
0 0.5 1 1.5 2Longitudinal Rotor Separation, s/R
Rat
io o
f Mea
n R
otor
Pow
er
to Is
olat
ed R
otor
Pow
er
h/R = 0.62h/R = 0.2h/R = 0.29h/R = 0.45
(b)
Fig. 20 – Unducted “Tandem” Fan Performance (a)thrust at constant speed/collective and (b) power at
constant thrust
Elliptical (oval) ducted fan testing was conducted fora similar parametric set of vertical and longitudinalrotor separation distances as was performed for theunducted “tandem” rotor configurations. Figure 21shows a picture of the experimental installation of aelliptical ducted fan on the same basic teststand/apparatus as the isolated rotor, unductedcoaxial/tandem rotors, and circular ducted fans weretested on.
Fig. 21 – Elliptical Ducted Fan Test Installation
Figure 22 shows the effect on ducted fan liftaugmentation as a function of longitudinal rotor torotor separation, s/R, for two different verticalseparation settings, h/R = 0.3 and h/R = 0.62.Unlike initially expected, there is no reduction inlift/thrust augmentation with increasing s/R. In allcases studied, good duct lift/thrust augmentation(over the unducted configurations) is preserved. Thisresult bodes well for the viability of the ellipticalducted-fan concept. The inherent rotor-to-rotorseparation will enable the use of rotor speed controlfor vehicle pitch and roll control, while at the sametime not forcing a substantial performance penalty.
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
0 0.5 1 1.5 2 2.5
Longitudinal Rotor Separation, s/R
Rat
io o
f Duc
ted
Fan
to U
nduc
ted
Fan
Thr
ust
(Con
stan
t Pow
er)
Elliptical Duct: h/R = 0.3h/R = 0.62
Fig. 22 – ‘Elliptical’ Ducted-Fan Performance(constant power)
Given prior work indicated in Refs. 27 and 40, asimple momentum theory expression can be derivedfor the ratio of ducted fan induced power to unductedfan induced power for oval ducted fans (refer toAppendix D). This expression includes theintroduction of a duct efficiency factor, ε, (0 ≤ ε ≤ 1).Ideal duct performance predicted when ε=1. Whenε=0 the PDF/PUDF (induced power)=1 for all s/Rvalues.
Figure 23 compares the above momentum theoryexpression with experimental data for the elliptical(oval) ducted fan hover testing. Predictions are madefor both the ideal case (ε=1) and an assumed ductefficiency of ε=0.35. There is very good agreementbetween the simple momentum theory for oval ductedfans and the test results.

T222-4-10
0
0.2
0.4
0.6
0.8
1
0 0.5 1 1.5 2 2.5Longitudinal Rotor Separation, s/R
Rat
io o
f Duc
ted
Fan
Indu
ced
Pow
er to
Und
ucte
d Fa
n In
duce
dPo
wer
Experimental Data
Momentum Theory for an IdealOval Duct
Momentum Theory Assuming aDuct Efficiency of 0.35
Fig. 23 – Elliptical (Oval) Ducted Fan Induced Powerat Constant Thrust (h/R=0.29)
Terrestrial-Analog Testing
A series of model-scale terrestrial-analog flightvehicle tests continue to be conducted at NASAAmes exploring the unique flight characteristics ofunducted-fan and ducted-fan vertical lift vehicles (forexample, Fig. 24). Despite the large body of work tobe found in the literature regarding the terrestrialapplications of ducted-fan VTOL vehicles, aconsiderable amount of work remains to beperformed to assess the operational characteristics forplanetary science applications.
Fig. 24 – Variable Separation Study Platform (VSSP)
The Army/NASA Rotorcraft Division at AmesResearch Center is currently collaborating with theNASA Minority University Education Program atNASA Headquarters to sponsor and conduct astudent design competition for Titan VTOL conceptsand missions. This competition will be held in the2003 academic year (Ref. 39). This NASA TitanVTOL design competition will complement the 2000AHS International, NASA, and Sikorsky Aircraftstudent design competition for a Martian autonomousrotorcraft (Refs. 10-14). It is anticipated that theTitan VTOL design competition will not only be anexcellent educational outreach opportunity, but,additionally, might ultimately contribute to NASA’sOuter Planet/New Horizons programs.
Venus Hybrid Airship
Of the three planetary bodies besides Earth where ittheoretically might be feasible to design and flyvertical lift aerial vehicles, Venus will likely pose thegreatest challenge. The atmosphere of Venus isextremely hot and dense near its surface (refer toTable 1).
Concept Definition and Analysis
The extremely high atmospheric densities nearVenus' surface (plus the near-Earth-magnitude of itsgravitational field) would suggest that a buoyant, orsemi-buoyant, vehicle might represent the mostpractical design for exploration of Venus (Fig. 25).The airframe of a Venusian hybrid-airship would be arigid hull, which would have to be able to sustainsubstantial pressure differentials across the hullsurface.
Venus’ high surface temperatures also posetremendous challenges for aerial vehicle design.Though active and passive technologies exist forthermal management of planetary science hardware,extended operation of such hardware near Venus’surface is currently problematic with today’stechnology. This will, therefore, mean that the lift(and power) required for take-off and landing willneed to be kept to an absolute minimum (thusnecessitating buoyancy fractions greater than 75%).
Fig. 25 -- A Notional Venusian Hybrid Airship withTwin Hulls and Tandem Tilting Propellers and Wings
Figure 26 shows first-order estimates of a notionalVenus hybrid-airship’s hull size. The results shownin this figure assumes a hybrid-airship buoyancyfraction of 0.9 and a propulsion energy-source(batteries, fuel cells, etc.) weight fraction of 25%.Helium is assumed as the hybrid-airship lifting gas.A thin skin of titanium alloy is assumed for the hull.Hull skin thickness using titanium alloys ranges from0.5 to 1mm thick for vehicle mass from 10 to 50 kg.

T222-4-11
0
1
2
3
4
5
6
7
8
0 20 40 60
Vehicle Mass, kg
Fig. 26 – Hull(s) Size Estimate
Figure 27 is an orthogonal view of the notionalVenus hybrid airship concept being studied at NASAAmes.
Fig. 27 – Notional Venus Hybrid-Airship OrthogonalView
Figure 28 shows a first-order estimate of the hoverperformance and sizing of a tandem propellercombination (sandwiched between twin airship hulls)that could be used to take-off and land from Venus’surface. The performance and sizing estimatesshown in the figure assume the airship buoyancyfraction of 0.9 (therefore, the two propellers have tolift only 10% of vehicle weight in hover), a tip Machnumber of 0.1, a 200 N/m2 disk loading, and asolidity of 0.4 for the propellers. A 2% download forthe tiltwings supporting the rotors was used in thehover performance estimate. A figure of merit of0.48 (including the effect of download) wasestimated for the hybrid airship configuration.
0
200
400
600
800
1000
1200
10 20 30 40 50
Vehicle Mass, kg
Prop
elle
rs),
Wat
ts
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
Prop
elle
r Rad
ius,
m
Shaft PowerRadius
Fig 28 – Hybrid-Airship Propeller HoverPerformance and Sizing Estimates
Rotor/Vehicle Aeromechanics
A twin-hull configuration for hybrid airships presentsunique aerodynamic challenges for aerodynamicstatic stability characteristics due to interactionalaerodynamic influences of ellipsoidal bluff bodies inclose proximity. Low speed wind tunnel testing isplanned to assess these interactional aerodynamicphenomena for ellipsoidal bodies in close side-by-side proximity (Fig. 29).
(a)
(b)
Fig. 29 – Wind Tunnel Testing for Ellipsoidal BluffBody Interactional Aerodynamics (a) test models and
(b) test installation

T222-4-12
Terrestrial-Analog Testing
Relying again upon readily available radio-controlledmodel components, a simple proof-of-concept modelwas built to demonstrate key attributes of the twinhull Venus hybrid airship concept.
The initial proof-of-concept vehicle relied on fourrotors to provide lift, forward propulsion, and yawcontrol. The spar separating both airship hulls wasstructural only and did not provide any lift duringforward flight. Despite the design compromises forthe proof-of-concept terrestrial surrogate vehicle, thebasic conceptual feasibility of the twin-hull hybridairship was established. Stable but maneuverableflight was demonstrated in closed laboratoryenvironment (Fig. 30a-b). Take-off and landings andprecision handling were demonstrated.
(a)
(b)
Fig. 30 – Proof-of-Concept Surrogate Vehicle (a)front view, in flight in the laboratory, and (b) side
view
Future Plans
The near-term focus of the vertical lift planetaryaerial vehicle research will begin to be directedtowards two efforts: the Mars Smart Rotorcraft FieldAgent (SRFA) project which is in response to theNASA Astrobiology Science and Technology forExploring Planets Announcement of Opportunity(Ref. 43), and support of a NASA-sponsoredMinority University (Ref. 39) student designcompetition on Titan VTOL aircraft. The MarsSRFA project will equally focus on Mars rotorcraft
aeromechanics issues, as well as demonstratordevelopment and terrestrial surrogate vehicle fieldtrials.
The SRFA terrestrial surrogate vehicles will be testedduring a field campaign at Haughton Crater, DevonIsland, Canada (Fig. 31). The field campaign willcontinue ongoing astrobiology research at Haughtonand will demonstrate a systems level capability tocarry out such research on Mars. The rotorcraft willbe instrumented with imaging instrumentation foraerial reconnaissance of multiple sites including onesthat are otherwise inaccessible. The rotorcraft will beequipped with a panoramic camera for surfacecharacterization and will have a mechanism on eachlanding leg to automatically acquire a soil sample. Aspecial all terrain vehicle (ATV) will include ascience platform equipped with a close-up cameraand Raman spectrometer.
Fig. 31 – Mars-Analog Site Field Demonstrations ofSurrogate Vehicles (Background Image Courtesy of the SETI Institute)
The SRFA system (which includes the ATV) willinclude data analysis software to discriminateautonomously between different rock-formingminerals and to identify certain classes of micro-organisms. The capability in question will be anaugmentation of the on-going development at NASAAmes of a "Geology Field Assistant". This softwareagent combines information about the physicalcharacteristics of rocks (e.g. texture, grain size, color)with diagnostic spectral characteristics to identify theminerals that compose the rock in question. Thespectral characteristics of micro-organisms provide asimilar means of detecting such organisms in the soilsat sites of interest in the Haughton complex.
Concluding Remarks
The development of vertical lift planetary aerialvehicles could potentially represent an important newcapability in the exploration of our solar system.Planetary aerial vehicles could aid in suchmomentous scientific endeavors as the ‘search forwater’ and the ‘hunt for life’ on Mars, theinvestigation of fundamental pre-biotic organic

T222-4-13
chemistry processes on Titan, and the understandingof geologic and atmospheric evolutionary processesof our ‘sister’ planet, Venus. Vertical flight willprovide the essential component of three-dimensionalmobility required for these important scientificinvestigations.
Engineering studies continue to be pursued at NASAAmes Research Center as to vertical lift planetaryaerial vehicles. Vehicle concepts and associatedexperimental work investigating their feasibility isbeing conducted. Several experimental results arepresented for Mars rotors under simulated Mars-likeconditions, unducted and ducted fan.rotor results withpotential application to a Titan VTOL aircraft. Andterrestrial surrogate vehicle, proof-of-concept, flighttesting for potential Venus hybrid airships.
Over five hundred years ago, the vision of verticalflight was first conceived by Leonardo de Vinci.Approximately one hundred and fifty years ago, thefirst steps toward automated computation andanalysis were taken by Charles Babbage. Nearly onehundred years ago, first flight with a heavier than airpowered aircraft was ultimately achieved by Orvilleand Wilbur Wright. Now, in the twenty-first century,a call is being sounded to a new generation fromwhom future Martian aviators and planetary aerialvehicle designers will be drawn. The golden age offlight is not in the past, but in the future. First flightwill be achieved yet again – this time against alienskies.
Acknowledgments
The authors would like to acknowledge thecontributions in support of this paper of: GarrettKramer, Jim Phoreman, and Dr. Ron Greeley ofArizona State University; and Dr. Farid Haddad andDr. Johanne Van Aken of the Army/NASARotorcraft Division. Further, the continuedcollaboration of Dr. Geoffrey Briggs of the NASAAmes Center for Mars Exploration and Dr. VirginiaGulick, of the SETI Institute in the area of verticalplanetary aerial vehicles is gratefully acknowledged.
References
1. Young, L.A., et al, “Design Opportunities andChallenges in the Development of Vertical LiftPlanetary Aerial Vehicles,” American HelicopterSociety (AHS) Vertical Lift Aircraft DesignConference, San Francisco, CA, January 2000.
2. Aiken, E.W., Ormiston, R.A., and Young, L.A.,“Future Directions in Rotorcraft Technology atAmes Research Center,” 56th Annual Forum of
the American Helicopter Society, International,Virginia Beach, VA, May 2-4, 2000.
3. Young, L.A., "Vertical Lift -- Not Just ForTerrestrial Flight," AHS/AIAA/SAE/RaeSInternational Powered Lift Conference,Arlington, VA, October 30-November 1, 2000.
4. Young, L.A. and Aiken, E.W., “Vertical LiftPlanetary Aerial Vehicles: Three PlanetaryBodies and Four Conceptual Design Cases,” 27th
European Rotorcraft Forum, Moscow, Russia,September 11-14, 2001.
5. Savu, G. and Trifu, O. “Photovoltaic Rotorcraftfor Mars Missions,” AIAA-95-2644, 1995.
6. Gundlach, J.F., “Unmanned Solar-PoweredHybrid Airships for Mars Exploration,” AIAA99-0896, 37th AIAA Aerospace SciencesMeeting and Exhibit, Reno, NV, January 11-14,1999.
7. Kroo, I., “Whirlybugs,” New Scientist, June 5,1999.
8. Young, L.A., et al, “Use of Vertical LiftPlanetary Aerial Vehicles for the Exploration ofMars,” Concepts and Approaches for MarsExploration, Lunar and Planetary Institute (LPI)Report # 1062, Houston, TX, July 18-20, 2000.
9. Young, L.A., Aiken, E.W., Gulick, V.,Mancinelli, R., and Briggs, G.A., “Rotorcraft asMars Scouts,” IEEE Aerospace Conference, BigSky, MT, March 9-16, 2002.
10. Healey, A. "Mars Explorer," Helicopter World,Shephard Publishing Group, London, England,December 1999.
11. Thompson, B., “Full Throttle to Mars,” Rotor &Wing, Phillips Business Information, LLC,Potomac, MD, March 2001.
12. University of Maryland Year 2000 AHS StudentDesign Competition Proposal on the“Development of Rotary-Wing Technologies forUse in Mars Exploration”(http://www.enae.umd.edu/AGRC/Design00/MARV.html).
13. Georgia Institute of Technology Year 2000 AHSStudent Design Competition Proposal on the“Development of Rotary-Wing Technologies forUse in Mars Exploration”(http://www.ae.gatech.edu/research/controls/projects/mars/reports/index.html).
14. Datta, A., et al, “Design of the MartianAutonomous Rotary-wing Vehicle,” AHS

T222-4-14
Specialist’s Meeting on Aerodynamics,Acoustics, and Test and Evaluation, SanFrancisco, CA, January 23-25, 2002.
15. Young, L.A., Aiken, E.W., Derby, M.,Demblewski, R., and Navarrete, J.,“Experimental Investigation and Demonstrationof Rotary-Wing Technologies for Flight in theAtmosphere of Mars,” 58th Annual Forum of theAHS, International, Montreal, Canada, June 11-13, 2002.
16. Corfeld, K., Strawn, R., and Long, L.,“Computations on a Prototype MartianRotorcraft,” AIAA 20th Applied AerodynamicsConference, St Louis, MO, June 2002..
17. Young, L.A., “Exploration of Titan UsingVertical Lift Aerial Vehicles,” Forum onInnovative Approaches to Outer PlanetaryExploration 2001-2020, Lunar and PlanetaryInstitute (LPI) Report # 1084, Houston, TX,February 21-22, 2001.
18. Lorenz, R.D., “Post-Cassini Exploration ofTitan: Science Rationale and Mission Concepts,”Journal of the British Interplanetary Society(JBIS), Vol. 53, pg. 218-234, 2000.
19. Lorenz, R.D., “Titan Here We Come,” NewScientist, Vol. 167, No. 2247, July 15, 2000.
20. Lorenz, R.D., “Flexibility for Titan Exploration:The Titan Helicopter,” Forum on InnovativeApproaches to Outer Planetary Exploration2001-2020, Lunar and Planetary Institute (LPI)Report # 1084, Houston, TX, February 21-22,2001.
21. Nishimura, J., et al, “Venus Balloons at LowAltitudes,” Advances in Space Research, Vol.14, No. 2, Great Britain, 1994.
22. Lodders, K. and Fegley, Jr., B., The PlanetaryScientist’s Companion, Oxford University Press,1998.
23. Selig, M., Donovan, J., and Fraser, D., Airfoils atLow Speeds, H.A. Stokely. Publisher, 1989.
24. Lorenz, R., and Milton, J., Lifting Titan’s Veil:Exploring the Giant Moon of Saturn, CambridgeUniversity Press, 2002.
25. Abrego, A., Chang, I., and Bulaga, R.,“Performance Study and CFD Predictions of aDucted Fan System,” AHS Specialist’s Meetingon Aerodynamics, Acoustics, and Test andEvaluation, San Francisco, CA, January 23-25,2002.
26. Van Weelden, S.D., Smith, D.E., Mullins, B.R.Jr., “Preliminary Design of a Ducted FanPropulsion System for General AviationAircraft,” AIAA Paper 96-0376, AIAA 34th
Aerospace Sciences Meeting and Exhibit, Reno,NV, Jan 15-18, 1996.
27. Cahn, M.S., “The Design and Performance ofShrouded Propellers,” National AerospaceEngineering and Manufacturing Meeting,Society of Automotive Engineers, Paper 587C,Los Angles, CA, October 8-12, 1962.
28. Kjerstad, K.J., Paulson, J.W. Jr., “TransitionAerodynamics for 20-Percent-Scale VTOLUnmanned Aerial Vehicle,” NASA TechnicalMemorandum 4419, April 1993.
29. Anderson, S.B., “An Overview of V/STOLAircraft Development,” AIAA Paper 83-2491,AIAA Aircraft Design, Systems, and TechnologyMeeting, Fort Worth, TX, Oct 17-19, 1983.
30. Cook, W. L., “Summary of Lift and Lift/CruiseFan Powered Lift Concept Technology,” NASAContractor Report 177619, August 1993.
31. Lehman, C., Crafa, V., “Nacelle Design forGrumman Design 698 V/STOL,” .
32. Wilson, S.B., III, Donley, S, et al., “HandlingCharacteristics of a Simulated Twin Tilt NacelleV/STOL Aircraft,” .
33. Kohn, J., “Aerodynamics, Propulsion, andLongitudinal Requirements for a Tilt-NacelleV/STOL with Control Vanes Submerged in theNacelle Slipstream,” .
34. Mort, K. W., “Summary of Large-Scale Tests ofDucted Fans,” NASA Conference on V/STOLand STOL Aircraft, Paper # 8, NASA AmesResearch Center, Moffett Field, CA, April 4-5,1996.
35. Maki, R. L. and Giulianetti, D. J., “AerodynamicStability and Control of Ducted PropellerAircraft,” NASA Conference on V/STOL andSTOL Aircraft, Paper # 9, NASA AmesResearch Center, Moffett Field, CA, April 4-5,1996.
36. Hall, E. J. and Delaney, R. A., “3D EulerAnalysis of Ducted Propfan Flowfields,” AIAAPaper # 90-3034, AIAA 8th AppliedAerodynamics Conference, Portland, Oregon,Aug 20-22, 1990.
37. McCormick, B.W., Jr., Aerodynamics of V/STOLFlight, Academic Press, New York, 1967.

T222-4-15
38. Omar, M.E. and Lampkin, B.A., “Tenth-ScalePowered Model Test of a Tilt-Nacelle V/STOLAirplane,” AIAA Paper 77-594, AIAA/NASAAmes V/STOL Conference, Palo Alto, CA, June6-8, 1977.
39. Titan Vertical Lift Aerial Vehicle Student DesignCompetition:http://www.integratedspacetechnologies.com/titan/
40. Johnson, W.R., Helicopter Theory, PrincetonUniversity Press, 1980.
41. Stepniewski, W.Z. and Keys, C.N., Rotary-WingAerodynamics, Dover Publications, Mineola,NY, 1984.
42. Coleman, C.P., “A Survey of Theoretical andExperimental Coaxial Rotor AerodynamicResearch,” NASA TP-3675, 1997.
43. NASA Astrobiology Science and Technology forExploring Planets Announcement ofOpportunity:http://research.hq.nasa.gov/code_s/nra/current/NRA-02-OSS-01-ASTEP/index.html
44. Young, L.A., Johnson, J.L., Andrews, J., andDemblewski, R., “New Concepts andPerspectives on Micro-Rotorcraft and SmallAutonomous Rotary-Wing Vehicles,”20th AIAAApplied Aerodynamics Conference, Saint Louis,MO, June 24-27, 2002.
Appendix A – Mars Rotor Hover TestPerformance Data Reduction
Rotor thrust for the Mars rotor hover testing wasmeasured by combining the output of three calibratedload cells. Rotor collective was measured byperforming an installed calibration of the controlsystem actuator tachometer. Both rotor thrust andcollective were relatively straightforward to measure.Rotor power required additional effort to acquire anaccurate set of measurements.
Initial hover testing of the Mars baseline rotor wasconducted with electric motor manufacturer-specified“torque constants” to estimate rotor shaft torque andpower during testing. Though this was an acceptableapproach for rotor operation during testing, it wasunacceptable for deriving accurate research-qualitymeasurements of the rotor performance. An accurateestimate of the motor torque constant needed to bederived.
The equation relating the motor torque constant torotor shaft torque and motor input voltage is given by
iIT VKKQ = (1)
Where Q is the rotor shaft torque, the torque constantis KT, the amplifier gain constant is KI, and Vi is thecurrent-related motor controller voltage.
A post-test methodology was developed to obtainaccurate measurements of the installed test standmotor torque-constant, as well as to acquire bareshaft tares for the rotor. To achieve this objective aseries of installed (in the hover test stand) electricmotor tests were conducted. One set of test resultswas acquired for the test stand with a bare rotoroutput shaft. A second set of test results wereacquired for the test stand and installed electric motorby installing (on the test stand output shaft) andspinning a metal disk of known inertia. For both setsof test data (with and without the inertia disk), themotor solid-state controller was programmed to varythe rotor speed in linear increasing/decreasing rampsin speed for several cycles – thus approximating anearly constant motor acceleration/deceleration ofknown magnitude. By matching the motoracceleration/deceleration profiles (with and withoutthe inertia disk) with instantaneous motor electricalmeasurements, an installed motor torque constantcould be derived, as well as a more accurate estimateof the motor inertia (Fig. 32).
-1.5
-1
-0.5
0
0.5
1
1.5
0 500 1000 1500 2000 2500 3000 3500 4000
V
O
L
T
S
0
1
2
3
4
5
6
7
8
R
P
M
(
V
)
VOLT(CAL)
R_TH_VY
VOLTCONDR_TH_VX
Fig. 32 – Sample Motor Voltage and RPM versusTime
Mathematically, this “inertia disk” acceleration anddeceleration approach to deriving the motor torqueconstant is summarized in the following discussion.
The corrected torque constant, KTv, can then becalculated from the torque equations for a bare shaft(Configuration 1) and with the inertia disc(Configuration 2) with the following derivations.
The applied torque due to the bare shaft accelerationis given by the expression:
Qacc1= α1Io (2)
Where a is the motor acceleration with a bare-shaftand Io is the unknown, actual, moment of inertia forthe motor and bare-shaft configuration.

T222-4-16
The measured torque is given by
Qvolt1=KTKIVi1 (3)
Correspondingly the applied torque due to inertiadisk acceleration is:
Qacc2= α2(Io + Idisc) (4)
Finally, the measured torque due to disk accelerationis given by:
Qvolt2=KTKIVi2 (5)
Now
Qacc1= Qvolt1 (6)
And
Qacc2= Qvolt2 (7)
Finally, noting that the product of the torqueconstant, KT, and amplifier gain constant, KI, is givenby the expression:
KTv = KTKI (8)
And so performing the appropriate algebra yields
KTv = α2Idisc/[Vi2 - Vi1(α2/α1)] (9)
This process is repeated for several differentaccelerations and an average estimate is used todefine installed/corrected torque constant.
The expression for the corrected motor torqueconstant, KTv is independent of the motor moment ofinertia, Io. The corrected, or rather actual, motormoment-of-inertia, I1, can, though, be derived fromthe above set of equations as:
I1 = (α2Idisc) [ α1(Vi2/Vi1) - α2] (10)
Through this methodology, an installed motor torqueconstant was derived that was 19% higher than themanufacturer-specified value. The derived motorinertia value was 7% higher than the manufacturerspecification.
Appendix B – “Titan VTOL” Unducted- andDucted-Fan Hover Test Performance Data
Reduction
To conduct the aerodynamic hover performanceconfiguration studies of terrestrial surrogate vehiclesfor a Titan VTOL, two-bladed rotors having asolidity of 0.091, tapered-blade planform, and flat-
plate circular-arc airfoils were used during the hovertesting. Further, the rotor blades were at fixed-pitchand rotor thrust and power was varied solely by rotorshaft RPM increases. The rotor blades werecantilevered from the hub and were of very lowstiffness. Though these rotors are not representativeof the design/construction of rotors/fans that wouldbe employed in a Titan VTOL vehicle, they allowedan opportunity using simple models to assessinfluence of rotor configuration effects onfundamental rotorcraft performance characteristics.In particular, the focus of the research being on theeffect of dual-rotor configurations of rotor thrust andpower as related to isolated rotor performancecharacteristics.
To test the rotors, a hover test stand was constructed.A hollow 2.54 cm square-stock aluminum bar wasmounted on bearings inside of a 8.9 cm diameter,aluminum horizontal support tube. The inneraluminum bar rode on tracked roller bearings andwas attached to the load cell at the far end (withrespect to the rotor apparatus) of the horizontalsupport tube. Figure 33 shows the hover test stand.
Fig. 33 -- Test Stand (Unducted-Fan Testing)
The two rotors were mounted on the end of 1.27 cmdiameter carbon rods. These “swing arms” weremounted to circular clamps that could be loosened bya single bolt to allow easy repositioning of the armsand the two rotors. By horizontally translating androtating the “swing arms” the relative position of thetwo rotors could be varied. This technique wasemployed to test coaxial and tandem rotorconfigurations (both ducted and unducted).
A DC power supply was utilized to power the tworotors. The motors were wired in parallel to thepower supply. RPM for the rotors was varied byadjusting the voltage output of the power supply.Blade pitch remained fixed for each rotor. Rotorspeed was measured by an optical tachometer. Totalrotor thrust was measured by a calibrated load cellaffixed at the end of the test stand’s horizontalsupport tube. Rotor shaft power was derived viaestimates of the rotor/drive-train efficiency madethrough rotor bat testing and the methodology

T222-4-17
outlined in Ref 44. Figure 34 is the motor/drive-trainefficiency curve derived from four sets of varyingrotor bat lengths.
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
0 0.05 0.1 0.15 0.2 0.25
Rotor Shaft Torque, N-m, (Uncorrected)
Mot
or/D
rive
-Sys
tem
Eff
icie
ncy
Fig. 34 – Motor/Drive-Train Efficiency as a Functionof Motor Torque Loading
Both hub tares and the motor drive train efficiencywere made to the rotor data. No test standinterference corrections were made to the rotor data.The efficiency correction is:
Ω−
Ω
= Input
Input
HT
HTInput
Input
PP
PPP ff (11)
where P is the rotor shaft power corrected for hubtares (all data in the paper have hub tares applied),PInput is the motor/drive-train input (electrical) powerat the rotor test condition, P HT Input
is the hub tare input(electrical ) power. The form of the efficiencyfunction, f, is derived from regression analysis of Fig.34 data.
Both isolated rotor and dual-rotor data were acquired.Isolated rotor and dual-rotor performancemeasurements were compared to each other bydividing the dual rotor data by a factor of two.Because input electrical power was provided inparallel to both rotors (and two independentmotor/drive-trains) when in dual-rotor operation, therotor speeds – though individually measured – variedupon test condition with respect to each other. Thedisagreement between the two rotor speeds wastypically 5% of the nominal operating speed. Toaccount for the difference between the two rotorspeeds for a given test condition, a root-mean-square( ( ) 22
221 Ω+Ω=Ω ) estimate of a nominal rotor speed
was employed to estimate rotor thrust and powercoefficients and figure of merit.Figures 35a-c are pictures of a few of the unducteddual-rotor configurations studied.
(a)
(b)
(c)
Fig. 35 – Examples of Unducted RotorConfigurations (h/R = 0.617): (a) s/R = 0.69, (b) s/R
= 0.345, and (c) s/R = 0
Because rotor thrust and power could only be variedby rotor speed changes for the testing conducted(versus having control over rotor collective), thispresented challenges to the analysis of the rotor data.Figure 36a-b is an illustrative example of rotor datafrom the unducted rotor/fan hover testing for aisolated rotor and a coaxial rotor (thrust and powerdivided by two) configuration.
0.00
2.00
4.00
6.00
8.00
10.00
12.00
14.00
0.00 500.00 1000.00 1500.00 2000.00 2500.00
RPM
Mea
n R
otor
Pow
er (W
atts
)
Single Isolated Rotor
s/R = 0 (CoaxialRotor)
(a)

T222-4-18
0.00
0.20
0.40
0.60
0.80
1.00
1.20
1.40
1.60
1.80
2.00
0.00 500.00 1000.00 1500.00 2000.00 2500.00
RPM
Mea
n R
otor
Thr
ust (
N)
Single Isolated Rotors/R = 0 (Coaxial Rotor)
(b)
Fig. 36 – Typical (a) Power and (b) Thrust Data as aFunction of Rotor RPM
Ideally, because the rotor blades are flat-pitch, therotor thrust and power coefficients should be constantwith rotor speed. Reynolds number effects onlymake this true for performance data at higher tipReynolds numbers. Figure 37 shows the nominalobserved effects of rotor tip Reynolds number onrotor thrust and power coefficients. Analysis of thedata was therefore limited to the higher tip speedswhen comparing rotor configurations.
0.0000
0.0050
0.0100
0.0150
0.0200
0.0250
0 10000 20000 30000 40000 50000
Tip Reynolds Number
Rot
or T
hrus
t Coe
ffic
ient
(a)
0.0000
0.0010
0.0020
0.0030
0.0040
0.0050
0.0060
0 10000 20000 30000 40000 50000
Tip Reynolds Number
Rot
or P
ower
Coe
ffic
ient
, CP
(b)
Fig. 37 – Typical Tip Reynolds Number Effect on (a)Thrust Coefficient and (b) Power Coefficient
Comparison of rotor performance between thevarious rotor configurations was accomplished bynondimensionalizing the thrust or powermeasurements of one configuration by those of asecond configuration. For the unducted fan/rotormeasurements the ratios of mean rotor thrust toisolated rotor thrust, T/TI, and the ratio of mean rotorpower to isolated rotor power, P/PI, were comparedas a function of parametric sweeps of s/R, thelongitudinal rotor separation, and h/R, the rotorvertical separation distance. Obtaining thesenomdimensional performance ratios was based asfollowing manner.
If the rotor thrust and power coefficients are constantwith respect to rotor speed (ideally true for fixed-pitch rotor blades, but found to be true only for tipReynolds greater than 30,000 for the rotors tested),then rotor power and thrust for two separateconfigurations (1 and 2) are simple functions of rotorspeed:
Configuration 1 Configuration 2
21
1 aT
Ω=ρ
and 22
2 aT
Ω=ρ
31
1 bP
Ω=ρ
and 32
2 bP
Ω=ρ
(12a-d)
Having acquired thrust and power data as a functionof rotor speed, such as in Fig. 36, simple least-squares regression analysis can be employed toderive estimates of the speed relationshipcoefficients, for any given rotor configuration.
∑
∑
=
=
Ω
Ω
ρ
= n
1i
4i
2i
n
1i i
iT
a∑
∑
=
=
Ω
Ω
ρ
= n
1i
6i
3i
n
1i i
iP
b
(13a-b)
Now configuration 1 and 2 can be arbitrary in natureand one could use the above relationships to comparemean thrust or power of a dual-rotor configuration toisolated rotor performance (P/PI and T/TI), or,alternatively, one could be comparing ducted-fandual-rotor performance to unducted-fan performance(PDF/PUDF and TDF/TUDF). Both types of comparisonsare made in this paper using this general “ratio”approach of comparing the performance of twodifferent rotor configurations.
1
2
1
2
aa
TT
= (constant collective and rotor speed)

T222-4-19
23
2
1
1
2
1
2
aa
bb
PP
= (constant thrust coefficient)
32
2
1
1
2
1
2
bb
aa
TT
= (constant power)
(14a-c)
In order to compare analytical predictions of inducedpower for various configurations to the experimentalresults, it was necessary to derive estimates of theprofile power coefficient, CP0, to therefore estimateinduced power. This could not be accomplishedthrough regression analysis of the isolated rotornondimensional CP and CT polars because of the usedof fixed-pitch rotor blades. (Ideally, for fixed-pitchblades, CT and CP are constants, and, therefore,insufficient information would exist to deriveindependent estimates of CP0 and k). An alternateregression analysis approach was taken wherein theuse of the dimensional values of rotor thrust andpower (as varied with rotor speed) were used todefine the least-squares error function.
The least-squares error function, E, was defined as
∑
Ωρ+
ρ−=
i
2
3ii
30P
i
3i
i ARCA2
TkPE
(15)
From this least-squares regression analysis errorfunction, the following coefficients can be defined
∑ ρ=
i i
3i
1
T
A21A 3
iii
3i2 T
A21A ρΩ= ∑
∑ ρΩ=i
3ii
3i
31 TARB ( )∑ Ωρ=
i
23ii
32 ARB
∑ ρ=
i i
3i
i1
TPC ∑ Ωρ=
i
3iii2 PC
(16a-f)
Where
( ) ( )221122110P ABABACACC −−=
( ) ( )22112211 BABABCBCk −−=
(17a-b)
A is the rotor disk area and R is the rotor radius. Aprofile drag coefficient of CP0=0.00052 and aninduced power constant of k=2.07 were derived from
the isolated rotor data set (for tip Reynolds numbersgreater than 30,000).
The electrical input power to the dual rotorconfigurations was provided in parallel to the twoelectric motors. A speed difference of approximately5% was typically observed between the two rotors.This rotor speed difference translated to a rotor loadshare imbalance for some of the test results,particularly the unducted coaxial rotorconfigurations. A load share correction was appliedto the unducted coaxial rotor data. Only total thrustwas measured on the hover test stand, and, so, theload share had to be inferred from the rotor speedmeasurements during the testing. Noting that for thefixed-pitch rotors that CT is constant for both rotors,then
( )22121 TT ΩΩ∝≡τ (18)
The first-order rotor load share correction appliedwas then, therefore
dUncorrecte Power, Induced
CorrectedPower, Induced I
23
I PP
12
PP
⋅
τ+= (19)
Corrections ranging from 5 to 10% were typicallyapplied to the unducted coaxial rotor data. All otherdual rotor data in the paper have been presenteduncorrected, with respect to rotor load share.
Appendix C – Additional Notional PlanetaryMission Background
Mars Explorations
References 9 and 15 have devoted a fair amount ofdiscussion related to robotic Mars explorationmissions employing rotorcraft as aerial explorers.Two early candidate missions, in particular, havebeen studied: an aerial surveyor and soil/rock samplermission, and a rover and micro-scout combination(Fig. 38a-b).
>10 kmRadius
VTOL w.1 min. Hover
>30 min.Flight Time
(a)

T222-4-20
(b)
Fig 38 – Mars Rotorcraft Missions (a) Soil/RockSample Return to Lander and (b) Micro-Scout for
Large Rovers
Titan
The exploration of the solar system outer planets hasseveral unique challenges as compared to missions tothe inner planets. Among those challenges are thenear-mandatory use for onboard nuclear powergeneration for spacecraft operation, the effect ofspacecraft remoteness on telecommunication andmission execution, the long duration of missionlength, etc. Among the many questions a missionplanner has to answer are the ones listed in Table 2.
Table 2 – Sample List of Mission Planning Questions
Notional Mission Characteristics Constraints, Considerations, &Comments
What are the Mission science goals?
High-resolution imaging of Titan surface tocharacterize geological processes andplanetary body evolution
Multiple remote site surface samples over awide area to perform pre-biotic organicchemistry survey
In-flight, variable (low to medium) altitudeatmospheric sampling to characterizeatmospheric constituents and aerosolparticle dynamics and evolution
In-flight aerial imagery can complementpanoramic ground images acquired atremote landing sites; both sets of aerialvehicle images can be complemented withhigh-altitude orbiter imagery
Mobility afforded by a VTOL aerial vehicleis essential to acquire multiple site surfacesamples and return to lander for detailedanalysis
What are the major science instruments?
Orbiter: Radar & IR Imaging
Lander: Gas Chromatograph MassSpectrometer; micro-imager; upward-projecting Lidar for atmospheric turbulencemeasurements; temperature and pressuresensors; seismometers
Aerial Vehicle: Optical imager with pan andtelephoto; surface and atmosphericsampling devices; penetrometers on landinggear; laser ablation mass spectrometer
Acquiring data regarding the topology ofTitan’s surface, couple with an intensivemultiple site sampling measurement ofTitan’s surface (and atmospheric) chemistryis paramount to the understanding of theformation and evolution of this planetarybody. Further, seismic and atmosphericwind/turbulence measurements wouldenable an understanding of the transportmechanisms for the atmospheric and surfacechemical constituents.
What are the major spacecraft elements?
Cruise-Phase Spacecraft/Carrier Platform
Orbiter
EDLS & Lander
Carrier transports orbiter and EDLS/Landerto Titan insertion; Saturn flyby opportunitypost-orbiter and EDLS release
Orbiter required to provide telecom supportfor Lander and aerial vehicle; secondary
Aerial Vehicle capability is to provide on-orbit imagery ofTitan’s surface
Lander acts as delivery system and post-landing primary base for aerial vehiclesupport; lander would also have in-situsample analysis capability for samplereturned by the aerial vehicle
Lander would carry nuclear power sourceand would recharge aerial vehicle batteriesand/or fuel-cell
Power Requirements?
Cruise-phase carrier platform/spacecraftwould carry one to two nuclear powersources
Orbiter would rely on batteries/fuel-cellsand tethered satellite electric powergeneration capability
Lander would have to carry one nuclearpower source
Aerial vehicle would rely on batteriesand/or fuel cells which would be rechargedby the lander
Innovative technologies will be required tokeep number of nuclear power sources to aminimum
Aerial vehicles will be energy intensiveplatforms that will require long rechargeperiods of time between flights
Telecommunication Requirements?
Orbiter would be primary telecom linkbetween lander and aerial vehicle and Earth
Lander would be capable of low-bandwidthdirect contact with Earth, as a contigencycapability
Aerial vehicle would be able tocommunicate with lander via the orbiter; nodirect telecom to Earth
Titan and Saturn’s considerable distancefrom Earth, coupled with the high databandwidth required for a Titan VTOL aerialexplorer mission will pose significant deep-space communication challenges. Thischallenge can be somewhat moderated byincorporation of an orbiter into the baselinemission for orbital observations andtelecom relay to Earth of the ground assets.
Anticipated Duration of Mission?
Six months post-Titan orbital insertion andentry/descent
Mission duration will be dictated by twoprimary constraints: operations supportlimits/costs, and predicted mean timebetween equipment failures and projectedcumulative probabilities of flightincidents/accidents with time.
What is the target in-atmosphere surveyarea to be covered, or flight endurance tobe achieved?
A minimum radius of action of 150 to 200kilometers should be required
A wide survey area and multipleflights/sorties should be supported by thebaseline mission to acquire a scientificallyvalid survey of the planetary body
What is the level of autonomy and“robotic cooperation” required for theMission?
High levels of Aerial Vehicle and LanderAutonomy Required
Lander acts a Primary Base for AerialVehicle
High level of robotic cooperation: Landerprovides support and post-flight in-situanalysis for aerial vehicle
A “system of systems” approach will needto be taken to establish required technicalreadiness levels for flight hardware. Thiswill include extended duration robotic aerialexplorer and lander surrogatedemonstrations at remote extremeenvironment terrestrial sites.
What level of “heritage” can be appliedto the mission?
Cruise-Phase Carrier Platform & EDLS canbe scaled-up from Cassini-Huygensmission.
Aeroassist maneuvers from Mars GlobalSurveyor
Inflatable structures foraerobraking/aeroassist from Russia/ESAIRDT Flight Demo 2000
Tethered Satellite technology fromNASA/ASI TSS-1R mission on STS-75
What are the critical technologiesrequired to execute the Mission?
Aerial Vehicle Design Ground test facilities can be developed totest key aerial vehicle technologies.

T222-4-21
Orbiter aeroassist orbital entry usinginflatable structures
Orbiter tethered satellite electrical powergeneration
Improved nuclear power sources for cruise-phase carrier platform and the lander/aerialvehicle combination
System Automation
Remote site terrestrial extreme environmentrobotic aerial explorer and lander surrogatedemonstrations will conducted to validatesystem automation technical readiness.
The notional mission characteristics noted in Table 2for a Titan aerial explorer are illustrated in part inFig. 39a-d.
(a)
(b)
(c)
(d)
Fig. 39 – Titan VTOL: (a) spacecraft, (b) orbiter withaerobrake inflatable structures and electrical
generation tether, and (c) EDLS descent, and (d)aerial explorer & lander
Venus
Exploring Venus, as an inner planet in the solarsystem, is somewhat easier than missions to Titan insome regards, but in other ways the problem is evenmore challenging. Though closer to Earth, andhaving abundant solar energy (while outside theVenus’s atmosphere), the atmospheric conditionsnear, or on, Venus’ surface are extremely harsh.
Table 3– Venus Hybrid Airship Mission PlanningQuestions
Notional Mission Characteristics Constraints, Considerations, &Comments
What are the Mission science goals?
To investigate the near-surface atmosphericdynamics and constituents of Venus
Acquire multiple site ground images andlimited surface sample chemical/geologicalin-situ analyses
Acquire “ground truth” of Magellan andorbiter radar imagery for small limited areas
It is essential from a scientific standpoint touncover the similarities and differencesbetween the planetary evolutionaryprocesses of Venus versus Earth.
What are the major science instruments?
Orbiter: ground penetrating radar
Aerial Vehicles: APXS mass spectrometerfor surface samples; pressure andtemperature sensors; seismometer probes;radar imaging; micro-imager; gaschromatograph mass spectrometer foratmospheric samples
The primary focus of the orbiter andpowered-flight phase of the aerial vehicleswould be to better understand the geologyand mineralogy of Venus’ surface. Theunpowered-flight phase of the aerialvehicles would be dedicated tounderstanding the low and mediumatmospheric chemistry and transportmechanisms.
What are the major spacecraft elements?
Combination cruise-phase carrier platformand orbiter
Two EDLS systems, each carrying oneaerial vehicle
Multiple EDLS and aerial vehicles increasesmission science return and/or mitigates risk
Having both a powered and unpowered(drift) stage to the aerial vehicles flightprofile would extend flight endurance andmission science return
Power Requirements?
Solar arrays for orbiter/spacecraft
High temperature batteries for aerialvehicles
Use of solar cell arrays would reducemission cost

T222-4-22
Aerial vehicle propulsion options includeelectric drives or heat (possibly steam)engines
Telecommunication Requirements?
Aerial vehicles would be capable of telecomwith orbiter and directs links with Earth
Anticipated Duration of Mission? Per aerial vehicle: 30-60 minutes poweredflight near Venus’ surface; 2-3 days driftingunpowered at medium altitudes afterjettisoning ballast and unessential hardwarepost-powered flight.
What is the target in-atmosphere surveyarea to be covered, or flight endurance tobe achieved?
Fifty kilometers of total range with on totwo soft landings on surface
What is the level of autonomy and“robotic cooperation” required for theMission?
What level of “heritage” can be appliedto the mission?
Cruise-Phase Platform & Orbiter can bescaled-up from Magellan spacecraft
EDLS & Lander technology from USSRVenera 9 and 13
What are the critical technologiesrequired for the Mission?
High temperature electronics, materials, andpropulsion systems for aerial vehicles
Multiple EDLS release from a singlespacecraft/orbiter
Improvements in high temperatureelectronics and other equipment will beessential for unpowered flight phase and/oralternatively a final soft landing to concludemission.
Because of the extreme environmentalconditions of Venus’ surface vehiclerecharging and multiple flight/sorties from alander is unlikely – thus making a Venusaerial explorer mission inherently differentin character from a Mars or Titan mission.
Limitations in powered flight duration andequipment longevity in the Venusian near-surface atmosphere can partially becompensated for by employing multipleaerial vehicles for the overall mission.
The notional mission characteristics noted in Table 3for a Venus hybrid airship are illustrated in part inFig. 40a-c.
(a)
(b)
(c)
Fig. 40 – Notional Mission: (a) spacecraft at launch,(b), spacecraft in orbital insertion configuration, and
(c) entry and descent of the Venus hybrid airshipexplorers
Appendix D – Momentum and Vortex TheoryModels
Unducted Coaxial Rotor Induced Power
Assume that a coaxial rotor system has the upperrotor located at z/R = + h/R and the lower rotor atz/R=0. The induced power ratio of an unductedcoaxial rotor (with respect to isolated rotor inducedpower) can be expressed by the following expression:
A2T
TTPP
3
LUhU
I ρ
ν+ν=
Power Induced
(20)
TU and νU is the upper rotor thrust and inducedvelocity at the upper rotor’s disk plane. TL is thelower rotor thrust. Note that the total thrust can berelated to the individual rotor thrust by the expression
( ) LT1T +τ= (21)
The above expression introduces the rotor load sharefactor, τ, such that TU = τTL. Also introduced is thevelocity term, ν , which is an (rotor disk) area-weighted “mean” induced velocity through the lowerrotor’s disk plane.

T222-4-23
Substituting Eq. 20 into 21 gives
( )( )
LUh23
I TA2
11
PP ρ
ν+τντ+
=Power Induced
(22)
To proceed further in the analysis, three assumptionsnow have to be made. First, the single isolated rotorinduced velocity distribution can be approximated byactuator disk vortex theory (where the rotor wakesare approximated by vortex cylinders, andsuperposition of induced velocities is allowed).Second, the upstream/upper rotor’s wake contraction(as it intersects the downstream/lower rotor’s diskplane) can be approximated by applying mass flowcontinuity to the above vortex cylinder velocitydistribution. And, finally, third, an area-weighted“mean” (spatially averaged across the whole rotordisk) inflow velocity can be defined for thedownstream/lower rotor taking into account theupstream rotor’s wake. These three assumptions canbe encompassed by the following set of equations:
( ) ( )( )
ϑ−+
ϑ−−
γ≈ϑν
2Rz1
Rz1
2Rz
Rotor Single,
(23a)
(Where Rh=ϑ and γ=γU for the upstream/upperrotor, and 0=ϑ and γ=γL for the downstream/lowerrotor. Correspondingly, referring to Eq.23a, νUh ≡ν(h/R, h/R) + ν(0, h/R); νU0 ≡ ν(h/R, 0); νL ≡ ν(0,0).
( )
++
π≈
2
2
Wake
Rh1
Rh1
RA
(23b)
( ) 2L2
Wake2L0U2
Wake
RA
1R
Aν
π
−+ν+ν
π
≡ν
(23c)
The definition and usage of ν in Eqs. 20 and 23c ismore than a mathematical artifice. This area-weighted “mean” induced velocity at thedownstream/lower rotor’s disk plane can be thoughtof as accounting for the mixing/transport of
momentum from the inner portion of the downstreamrotor disk (where the upstream rotor wake is initiallyentrained) to the outer portion of the disk (which isostensibly, at least by classic rotor momentum theory,unaffected by the upstream rotor).
Noting that 2TLT AVTC ρ= , TTU C2Vτ=γ and
TTL C2V=γ , then Eqs. 23a-c can be substitutedinto Eq. 22 and the resulting induced power ratiosolution can be derived as
( )
τ++τ+τ
τ+= g12f
11
PP
23I Power Induced
Where
( )2Rh1
Rh
+=ζ
ζ+= 1g
ζ−= 2f
(24a-d)
Equation 24 agrees with the momentum theorysolution (for example, Ref. 40) for h/R=0, i.e.
4112PP I .≈→ . However, the derived approximatevortex theory result deviates from the momentumtheory solution for when h/R is very large. In thiscase, as h/R increases the momentum theory wouldsuggest that P/PI asymptotically approaches 1.28,versus the derived approximate vortex theory resultwhich yields 1441PP I .→ (for a rotor load share τ=1).The coaxial rotor momentum theory result, for largeh/R, suffers from the assumption that the flow can bedivided into two distinct regions: the inner half of thelower/downstream rotor disk area where the upstreamrotor wake is entrained, and the outer half of the rotordisk area which operates without being influence bythe upstream rotor. This assumption results in toosimplistic modeling. Neither momentum theory, orthe simple approximate vortex theory presented inthis paper, accounts for the effects of rotor wakeviscous diffusion in the far wake wherein at somepoint ∞→Rh and 1PP I → , though the vortextheory does a better job of approaching that limit.Largely unexplored in this paper is the effect of non-unity rotor load share on P/PI. Note that the derivedapproximate vortex theory does correctly predict thatif τ=0 then P/PI=1.

T222-4-24
Elliptical/Oval Duct Thrust/Lift Augmentation
The “static thrust,” or rather hover, induced power ofa ducted fan is (Ref. 27)
PDF =
T3
2ρeAe
(25)
The effective duct exit density, and exit area, aregiven by ρe and Ae. For a low-pressure-ratio ductedfan: ρ=ρe and Ae=ADF. Note that for an “ideal” ovalducted fan ADF = πR2 + 2sR
From Ref. 40, the induced power of an unductedtandem rotor configuration, and an isolated rotor, iseach respectively given by
21
m22
−=
power InducedI
UDF
PP
(26a)
Where the dual-rotor overlap, m, is given by
−
−
π= −
2
1
R2s1
R2s
R2s2m cos
(26b)
And
A2TP
3
I ρ= 2RA π= (26c-d)
Substituting the above equations into the ducted faninduced power expression, and solving for the powerratio PDF/PUDF gives
π
−
=DF
2
AR
2m2
Power InducedUDF
DF
PP
(27)
Now for a “real” oval ducted fan, introducing theducted fan “efficiency,” ε, the oval ducted faneffective exit area, ADF, is given by the expression
+π
+
ε+π
−
= sR2R2
m2R2
m2A 22DF
(28)
Note that when ε=1, the ideal oval ducted fan, thenADF = πR2 + 2sR, as noted earlier.
Substituting the expression for the effective ductedfan exit area into the induced power ratio equationyields an expression for the ratio of oval duct-faninduced power to unducted (tandem) fan inducedpower. This expression includes the introduction ofa duct efficiency factor, ε, (0 ≤ ε ≤ 1). Ideal ductperformance predicted when ε=1. When ε=0 thePDF/PUDF (induced power)=1 for all s/R values.
( ) ( )
πε
+ε++−
−=
Rs4m2m2
m2PP
UDF
DF
Power Induced
(29)
Where m, the rotor overlap, is given by Eq. 26b andthe duct efficiency, ε, is an empirical constant.Though the duct efficiency, ε, is treated as invariantwith respect to s/R changes in the predictions in thispaper, it probably does in actuality vary with s/R tosome degree.