Embed Size (px)
Citation preview

Copyright 2018, ACGGP. This paper was selected for presentation by an ACGGP Technical Committee following review
of information contained in an abstract submitted by the author(s).
Abstract Common Reflection Surface (CRS) processing became popu-
lar in the geophysical community in the late 1990s when suffi-
cient computing power became available to solve for the mul-ti-domain search algorithms included in the technology. Orig-
inally designed as a replacement for DMO processing, i.e. for
solving problems related to dipping reflections, it became
more and more apparent that the CRS technology has a big
impact on all major steps in seismic data processing. Nowa-
days it is either used to improve poor seismic image quality on
the one hand side (e.g. Gierse et al., 2010, Otto et al., 2015)
but also on the other hand side it solves for high-resolution
prestack attribute extraction for seismic reservoir characteriza-
tion (e.g. Trappe et al., 2006, Pruessmann et al., 2011).
The CRS methodology is a multi-attribute stacking opera-tor (Mann et al., 1999). The wavefield attributes required to
parameterize the CRS operator are directly extracted from the
prestack seismic data. They are related to the local depth, dip
and curvature of the reflection surfaces in the subsurface. In
contrast to the NMO stacking theory, which relies on a flatly
layered subsurface, the CRS surfaces can have any shape.
Moreover, the CRS operator isn't confined to one CMP bin.
The size of the CRS operator can be chosen according to e.g.
the size of the Fresnel zone. That way all energy contributing
to a subsurface reflection can be collected instead of limiting it
to the number of traces in the arbitrarily defined CMP bin.
CRS-based data processing has proven to significantly im-prove seismic imaging in settings with complex subsurface
geology and rough topography. Both issues are usually caus-
ing a relatively low signal-to-noise ratio. CRS processing can
improve the S/N ratio and therefore helps in better defining
seismic velocities or other prestack data attributes.
Introduction The Common Reflection Surface (CRS) processing was
developed at the german University of Karlsruhe by Prof.
Hubral and his team in the late 1990s. It assumes that reflectors in the subsurface consist of small reflection
elements rather than reflection points. To describe such
elements, one needs to know more parameters than for the
simpler standard assumption of a reflection point. In the
simple NMO case the only parameter describing the travel
time of a reflection is the stacking velocity. On the other hand,
the theory for the CRS method is much more generalized and
covers reality better than the NMO theory.
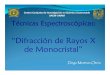
The so-called CRS parameters describing the CRS
stacking operator in 2D are given in Fig. 1. They are the angle of incidence at the measurement surface (α), the radius of
curvature of the wavefront generated by a point source located
on the reflection element (RNIP) and the radius of curvature
generated by an exploding reflector model from the reflection
element (RN). In 3D there are also the areal components of the
radii and the azimuth to consider. The CRS attributes can be
used to describe the CRS stacking operator. Additional
applications can be, for example, the calculation of an interval
velocity model by means of traveltime tomography.
Figure 1: 2D CRS attributes α, RN and RNIP describing the
CRS stacking operator (Mann et al., 1999)
The advantages of CRS stacking as opposed to conventional
NMO/DMO stacking were illustrated by Hubral et al. (1999)
in the schematic display of Fig. 2. For the NMO case (top) it is
simply a slice out of the common offset sections while in DMO additional data from adjacent bin locations are consid-
ered (triangularly shaped DMO operator, green). The CRS
operator (bottom, green) is much better adapted to the reflec-
tion travel times (blue) and, if necessary, can be extended to
further bins than the other operators. CRS stacking thus col-
lects a much larger portion of the actual reflection which leeds
to a better signal-to-noise ratio. Stacking along the full CRS
travel-time approximation provides a CRS stack, whereas par-
tial stacking in small offset and CMP intervals is used to pro-
duce CRS gathers with enhanced signal content. The CRS
gathers can either be created as offset-plane regularized gath-ers (suited for Kirchhoff-type migrations) or shot-geometry
preserving gathers (suited for shot migrations, e.g. RTM). In
this way, the migration algorithm benefits from the improved
S/N ratio of the CRS preconditioned data.
Enhanced seismic imaging for complex subsurface geology and rough topography by means of Common Reflection Surface (CRS) processing
Fieseler*, Thomas, TEECsolutions GmbH; Henning Trappe, TEECsolutions GmbH; Sandra Arevalo, TEECsolutions LLC; Hector Alfonso, Ecopetrol; and Jeny Navarro, Ecopetrol

2 FIESELER, TRAPPE, AREVALO, ALFONSO, NAVARRO
Figure 2: Comparison of NMO/DMO (top) and CRS (bottom)
stacking operators (Hubral et al., 1999)
Results CRS processing was applied to a 2D dataset from Colombia. The data suffers from the impact of rough topography and
complex subsurface geology with laterally strongly varying
rock velocities. Further, the seismic image is strongly deterio-
rated by a fault shadow zone caused by a major fault with a
high velocity contrast.
A workflow will be presented that adresses these problems
and thus allows for improved seismic imaging by using CRS
gathers throughout the processing sequence. In addition, it will
be shown that an RTM-based velocity model building strategy
proves to be key to depth imaging when ray-based methods
such as Kirchhoff fail to produce correct travel times.
Time Imaging. Fig. 3 shows the PreSTM result of a 3rd party
processing of one of the 2D lines. On the left-hand side one
can clearly see the problems of this data: the mountaineous
topography and the major fault located in the foothills region
result in an abstruse image and thus pose difficulties for
interpretation.
After a complete reprocessing of the data including CRS
processing and PreSTM-velocity updating the time image
shown in Fig. 4 was obtained. In the central part of the section
the CRS processing reveals dipping events that extent from the
flat lying basin sediments into the foothills transition zone
where they form the foot wall of the fault (marked by the blue
circle). This improved image result greatly facilitates the
structural interpretation and localization of the fault plane in
time domain.
Figure 3: Legacy PreSTM
Figure 4: PreSTM after CRS reprocessing
Depth Imaging. Despite the significant improvements of the
PreSTM image due to CRS processing, a time migration
algorithm can’t handle strong lateraly varying velocity
changes as they are expected in typical over-thrust faulting
geology. A depth migration can solve this problem and
therefore will position reflectors at their correct lateral
position in the subsurface.
The depth velocity model building started with Dix con-
version of the final PreSTM-velocity followed by structural smoothing that incorporated geologic information provided by
Ecopetrol. The so-obtained velocity model was updated by
tomography until flatness of the CRP gathers was satisfactory.
Fig. 5 shows the depth-migrated image after Kirchhoff-

ENHANCED SEISMIC IMAGING FOR COMPLEX SUBSURFACE GEOLOGY AND ROUGH TOPOGRAPHY BY MEANS OF CRS PROCESSING 3
PreSDM. Below the foothills area one can observe the foot
wall reflectors approaching the fault but the image is obscured
by criss-crossing noise of contrary dip. This noise will also
negatively impact any tomographic update in this region. To
avoid unreliable update results this area was excluded from
tomography.
In contrast to ray-based Kirchhoff migration, the wave-
field based Reverse Time Migration image of the same veloci-
ty model is much cleaner (Fig. 6). One can see where the fault
plane is located as the RTM not only reveals where the foot wall terminates against the fault plane but also the boundary of
the hanging wall to the left of the fault becomes discernable.
Figure 5: CRS-PreSDM
Figure 6: CRS-RTM
Figure 7: top – CV-RTM, 4700 m/s
middle – CV-RTM, 4900 m/s
bottom – CV-RTM, 5100 m/s
As travel time tomography fails to improve the velocity model
below the rugged topography an alternative model building
approach based on constant migration velocity scans and

4 FIESELER, TRAPPE, AREVALO, ALFONSO, NAVARRO
structural interpretation was applied in this region. The scans
were performed using RTM due to its superior imaging quali-
ty.
The left-hand side of the velocity model (CDP < 1700)
was flooded with constant velocities ranging from 4500 m/s to
5500 m/s in steps of 100 m/s while the right-hand side of the
model was left unchanged. Examples of this flooding exercise
are given in Fig. 7. From this collection of RTM images, the
panel of 4900 m/s was selected to interprete the fault plane,
i.e. the base of the hanging wall (Fig. 8). The blue ellipses in Fig. 7 and Fig. 8 mark a reflection event that was best focused
at a velocity of 4900 m/s. This event was interpreted as a part
of the base of the hanging wall and it thus indicates the sub-
surface position and dip of the fault plane.
The hanging wall block with a constant velocity of 4900
m/s was then inserted into the tomographic velocity model and
again migrated with RTM (Fig. 9). Both, the foot wall and the
hanging wall blocks are now much better defined (compare
with Fig. 6).
Figure 8: Zoom of CV-RTM, 4900 m/s
Figure 9: CRS-RTM after integrating the hanging wall veloci-
ty. The fault plane is marked by the blue line.
Conclusion It was shown that Common Reflection Surface (CRS) pro-
cessing is a powerful tool to improve seismic images in areas
that are characterized by rough topography and complex sub-
surface geology, like e.g. Colombia. This is true for both, time
and depth imaging because the migration algorithms benefit
from the superior S/N ratio of the CRS gathers.
Furthermore, when dealing with over-thrust geology that
exhibits large velocity contrasts the choice of depth migration
algorithm is essential. Ray-based methods can’t provide relia-ble imaging results under these conditions.
The combination of Reverse Time Migration, constant ve-
locity scanning, and structural interpretation resulted in suc-
cessful delineation of the major fault plane as well as signifi-
cant image improvements in the fault shadow zone. Addition-
ally, it should be noted that a close cooperation with the inter-
pretation team of Ecopetrol was crucial for the presented mod-
el building strategy.
Acknowledgments We thank Ecopetrol for the permission to present their data.
References (1) Mann, J., Jäger, R., Müller, T., Höcht, G., and Hubral, P.
(1999). “Common-reflection-surface stack - a real data exam-ple.” J. Appl. Geophys., 42(3,4), 301-318.
(2) Hubral, P., Höcht, G., and Jäger, R. (1999) “Seismic ilumina-tion.” Leading Edge 18(11), 1268-1271
(3) Gierse, G., Eisenberg-Klein, G., and Pruessmann, J. (TEEC GmbH) “Using CRS gathers to improve prestack migration im-ages in the Gulf of Mexico.” Extended Abstract, PETEX Lon-don 2010
(4) Otto, D., Schlueter, P. (TEEC GmbH), Dhanpaul, T., Ragbir, S., Archie, C., and Gallai-Ragobar, N. (Petrotrin) “Improved imag-ing of a fold and thrust belt regime, onshore Trinidad, by means of the Common Reflection Surface (CRS) method” Extended Abstract, CGC Trinidad 2015
(5) Trappe, H., Endres, H., Samiee, R., Lohr, T., Krawczyk, C.M., Tanner, D.C., Oncken, O., and Kukla, P.A. “Quantitative Frac-ture Prediction from Seismic Data.” Abstract volume, PETEX
2006, London (6) Pruessmann, J., Gierse, G. (TEEC GmbH), Harms, G., and Vos-
berg, H. (RWE Dea) “Robust and effective AVO studies in ir-regular and noisy land data by CRS gather techniques” Extend-ed Abstract, SEG San Antonio/USA 2011