-
J Optim Theory Appl (2012) 154:549572DOI
10.1007/s10957-012-0022-9
Enhancements on the Hyperplanes Arrangementsin Mixed-Integer
Programming Techniques
Ionela Prodan Florin Stoican Sorin Olaru Silviu-Iulian
Niculescu
Received: 4 May 2011 / Accepted: 6 March 2012 / Published
online: 24 March 2012 Springer Science+Business Media, LLC 2012
Abstract This paper is concerned with improvements in
constraints handling formixed-integer optimization problems. The
novel element is the reduction of the num-ber of binary variables
used for expressing the complement of a convex (polytopic)region.
As a generalization, the problem of representing the complement of
a pos-sibly not connected union of such convex sets is detailed. In
order to illustrate thebenefits of the proposed improvements, a
typical control application, the control ofmultiagent systems using
receding horizon optimization techniques, is considered.
Keywords Mixed integer programming (MIP) Not convex constraints
Hyperplane arrangements Cell merging
Communicated by Panos M. Pardalos.
I. Prodan () S. OlaruAutomatic Control Department, SUPELEC
Systems Sciences (E3S), Gif sur Yvette, Francee-mail:
[email protected]
S. Olarue-mail: [email protected]
F. StoicanDepartment of Engineering Cybernetics, Norwegian
University of Science and Technology,Trondheim, Norwaye-mail:
[email protected]
I. Prodan S.-I. NiculescuLaboratory of Signal and Systems,
CNRS-SUPELEC, Gif sur Yvette, France
I. Prodane-mail: [email protected]
S.-I. Niculescue-mail: [email protected]
-
550 J Optim Theory Appl (2012) 154:549572
1 Introduction
Collision avoidance plays an important role in the context of
managing multipleagents (see [1, 2], where different frameworks for
the cooperative control of mul-tiple agents are described). In the
same time, it is known to be a difficult problem,since certain
constraints are not convex, [3]. For example, the evolution of a
dynam-ical system in an environment presenting obstacles can be
modeled in terms of a notconvex feasible region. More precisely, it
is possible to set up an optimization prob-lem such that the agent
state trajectory avoids a convex region, in fact, representingan
obstacle (static constraints) or another agent (dynamic
constraintsleading to aparameterization of the set of constraints
with respect to the current state).
A popular framework for the treatment of such an optimization
problem is repre-sented by Mixed-Integer Programming (MIP),
described in [4]. This method can bevery useful in several fields
of applications, due to its ability to include not
convexconstraints and discrete decisions in the optimization
problem (see, for instance [5]).There is a growing literature about
optimization problems, which can be formulatedthrough the use of
MIP techniques. For example, [68] focused their work on
opti-mization of agent trajectories. Multivehicle target assignment
and intercept problemsare studied by [3, 9]. MIP was also useful to
coordinating the efficient interaction ofmultiple agents in
scenarios with many sequential tasks and tight timing
constraints(see [10, 11]). In [12, 13], the authors used a
combination of MIP and Model Pre-dictive Control (MPC) (see, for
instance, [14, 15], for basic notions in MPC) to sta-bilize general
hybrid systems around equilibrium points. [16] introduced MIP in
apredictive control framework to plan short trajectories around
nearby obstacles. Themixed-integer formulation has also proven to
be useful for the convergence of mul-tiple agents toward a tight
formation; see [17]. Finally, an application for differentcontrol
design problems was reported in [18], where a feasible reference
signal whichpermits set membership testing for fault detection was
computed over a not convexregion, leading to a MIP formulation.
However, despite its modeling capabilities and the availability
of versatile solvers,MIP has serious numerical drawbacks. As stated
in [19], mixed-integer techniquesare classified as NP-hard, i.e.,
the computational complexity increases exponentiallywith the number
of binary variables used in the problem formulation.
Consequently,these methods may not be fast enough for real-time
control of systems with largeproblem formulations. There has been a
number of attempts in the literature to re-duce the computational
requirements of MIP formulations in order to make themattractive
for real-time applications. In [20], an iterative method for
including the ob-stacles in the best path generation is provided.
Other references, like [21], considera predefined path constrained
by a sequence of convex sets. In all of these papers,the binary
variables reduction is not tackled at the MIP level, but instead
the originaldecision problems are reformulated in a simplified MIP
form. The negative influenceof the large number of binary variables
in the problem formulation highlights theimportance of reducing
them. In [22, 23], we introduced a novel linear
constraintexpression for reducing the number of binary variables
necessary in describing theexterior of convex sets.
-
J Optim Theory Appl (2012) 154:549572 551
In the present paper, we resume these results in a unitary
description of not con-nected convex sets (or their complement)
using auxiliary binary variables. The op-timization problems where
the binary variables are used to express a feasible notconvex
region over which a (usually quadratic) cost function has to be
minimized,are treated in a first stage. The problem is reformulated
using a reduced number ofbinary variables through a compact
encoding of the inequalities describing the feasi-ble region. Thus,
the problem complexity will require only a polynomial number
ofsubproblems (Linear Programming (LP) or Quadratic Programming
(QP) problems)that have to be solved with obvious benefits for the
computational effort. In the sec-ond part of the paper, the
technique is extended for the treatment of not connectednot convex
regions. In a similar manner, a reduced number of binary variables
suf-fices in describing a not convex and not connected region. Some
of the noteworthyaspects of the approach which resumes also the
main contributions of this paper arethe following:
a convex representation in the extended space of state plus
binary variables usingthe associated hyperplane arrangement;
reduced complexity of the problem upon Boolean algebra
techniques; a notable property of optimal association between
regions and their binary repre-
sentation leading to the minimization of the number of
constraints.
The methods presented here can be used in several fields of
application. We chooseto exemplify here with the control of an
agent operating in a dynamic environmentwith obstacles. More
precisely, the agent, which may have an associated polyhedralsafety
region, is required to maneuver successfully in a hostile
environment. Theobstacles are designed as convex polyhedral
regions. In this context, the proposedreduction technique is
embedded within an MPC path planning for multiple agents.
The rest of the paper is organized as follows. In Sect. 2, the
preliminaries are pre-sented; the main idea being detailed in Sect.
3. Furthermore, in Sect. 4, the methodis extended to not connected,
not convex regions. The improvements in the computa-tional time for
the approach are detailed in Sect. 6. Discussions based on an
exampleare presented in Sect. 7, while the conclusions are drawn in
Sect. 8.
2 Preliminaries
The following notation will be used throughout the paper. The
closure of a set S,cl(S), is the intersection of all closed sets
containing S. The collection of all possiblecombinations of N
binary variables will be noted {0,1}N := {(b1, . . . , bN) : bi
{0,1},i = 1, . . . ,N}. For a scalar x R, we denote by x the upper
integer part,and by Bnp := {x Rn : xp 1} the unit ball of norm p,
where xp is the p-normof vector x Rn. Notations lp(n, d) and qp(n,
d) represent the complexity of solvinga linear program, quadratic
program, respectively, with n constraints and d variables.
For safety and obstacle avoidance problems (to take just a few
examples), thefeasible region in the space of solutions is a not
convex set. Usually, this region isconsidered as the complement of
a convex region, which describes an obstacle and/ora safety region.
Due to their versatility and relative low computational
complexity,the polyhedra are the instrument of choice in
characterizing these regions.
-
552 J Optim Theory Appl (2012) 154:549572
In the following, we define a polytope, P Rn, through its
implicit half-spacedescription:
P := {x Rn : hix ki, i = 1, . . . ,N}, (1)
with (hi, ki) R1n R, and its complement asCX(P ) := cl(X \ P),
(2)
with the reduced notation C(P ) whenever X is presumed known or
is considered tobe the entire space Rn.
By definition, every affine subspace, which is a support
hyperplane for P ,
Hi := {x : hix = ki}, (3)will partition the space into two
regions:1
R+(Hi ) := {x : hix ki}, R(Hi ) := {x : hix ki}, (4)with i = 1,
. . . ,N .
The not convex region C(P ), denoted by (2), may then be
described as a union ofregions that cover all space except P :
C(P ) :=
i
R(Hi ), i = 1, . . . ,N. (5)
Therefore, we note that the complement of a bounded polyhedra
(1) is covered by theunion of N overlapping regions denoted as Ri
(a simplified notation for region (4)associated to the ith
inequality of (1)).
In order to obtain a tractable problem formulation, one has to
use mixed integertechniques with the aim of defining a polyhedra in
the extended space of state +auxiliary binary variables of the
form:
hix ki + Mi, i = 1, . . . ,N, (6)i=N
i=1i N 1, (7)
with M a constant chosen appropriately (that is, significantly
larger2 than the restof the variables and playing the role of a
relaxation constant), and (1, . . . , N) {0,1}N the auxiliary
binary variables (which can activate or not the relaxation).
Remark 2.1 The set of solutions for (6)(7) can be projected in
the original space Rn,leading to a coverage of the not convex
region, which corresponds to the implicit
1The relative interiors of these regions do not intersect, but
their closures have as a common boundary theaffine subspace Hi
.2There exists a finite M sufficiently large if and only if the
polyhedra of type (1) are bounded. In theremaining portion of the
paper, all the polyhedra of type (1) are assumed to be bounded for
this reason.
-
J Optim Theory Appl (2012) 154:549572 553
definition in (2). A region Ri can be obtained from (6) with an
adequate choice ofbinary variables
i :=(
1, . . . ,1, 0i
,1, . . . ,1). (8)
Note also that the converse is false since no choice of binary
variables can lead to thedescription of a region R+i as in (4).
Indeed, if a binary variable is 1, the corre-sponding inequality
degenerates such that it covers any point x Rn (this representsthe
limit case for M ). The condition (7) is thus required to ensure
that at leastone binary value be 0, and consequently, at least one
inequality be verified.
As it can be seen in the representation (6)(7), a binary
variable is associated toeach inequality in the description of the
polytope (1). Obviously, for a big number ofinequalities, the
number of binary variables becomes exceedingly large. Since
theirnumber exponentially affects the resolution of any mixed
integer algorithm (usuallybased on branch and cut techniques, and
thus very sensitive to the number of binaryterms), the goal to
reduce their number is worthwhile. A first step would be to
elimi-nate from the half-space representation of the polytope all
the redundant constraints;see [24]. We suppose that this
pretreatment be performed, and we are dealing with anonredundant
description of the polyhedral set in (1).
3 Basic Ideas
By preserving a linear structure of the constraints, we propose
in the present sectiona generic solution toward the binary
variables reduction.
To each of the regions in (5), we have associated in (6) a
unique binary variable.Consequently, the total number of binary
variables is N , the number of supportinghyperplanes (see (1)).
However, a basic calculus shows that the minimum number ofbinary
variables necessary to distinguish between these regions is
N0 = log2 N. (9)The value of N0 is reached by observing that
each of the N regions in (6) can belinked to a unique number.
Taking the numbers successively (starting from zero), itfollows
that we need N0 bits to codify them into a binary
representation.
The question that arises is the following:
How to describe the regions in a linear formulation similar to
(6) through areduced number of binary variables?We impose firstly
that the binary expression appearing in the inequalities has to
remain linear for computational advantages related to the
optimization solvers. Thisstructural constraint is equivalent with
saying that any variable i should be describedby a linear mapping
in the form:
i() = ai0 +N0
k=1aikk, (10)
-
554 J Optim Theory Appl (2012) 154:549572
where
(1, . . . , N0) := {0,1}N0 . (11)In the reduced space of , we
will arbitrarily associate a tuple
i := (i1 . . . iN0) (12)
to each region Ri . Note that this association is not unique,
and various possibilitiescan be considered: in the following,
unless otherwise specified, the tuples will beappointed in
lexicographical order.
The problem of finding a mapping in , which describes region Ri
, reduces thento finding the coefficients (ai0, a
i1, . . . , a
iN0
) for which i(i) = 0 and i(j ) 1,j = i under mapping (10). This
translates into the following conditions for anyi, j {0,1}N0 :
ai0 +N0
k=1 aik
ik = 0,
ai0 +N0
k=1 aik
jk 1, j = i,
(13)
with ik the kth component of the tuple, i, associated to Ri
.
Remark 3.1 Note that, in (13), the equality constraints for j =
i were relaxed toinequalities since the value of Mi(j ) needs only
to be sufficiently large (anyi(
j ) 1 being a feasible choice). Furthermore, the condition 1 can
be relaxedto an arbitrary small positive constant by means of
counterbalancing through an in-crease in constant M .
Nothing is said a priori about the nonemptiness of the set
described by (13). Weneed at least a point in the coefficient space
(a0, a1, . . . , aN0), which verifies condi-tions (13) in order to
prove the nonemptiness. To this end, we present the
followingproposition.
Proposition 3.1 A mapping i() : {0,1}N0 {0} [1,[ which verifies
(13), isgiven by
i() =N0
k=1tk, where tk =
{k, if ik = 0,1 k, if ik = 1,
(14)
where k denotes the kth variable and ik its value for the tuple,
i , associated toregion Ri .
The coefficients (ai0, . . . , aiN0) of the linear mapping (10)
can be then obtained as
ai0 =N0
k=1ik, a
ik =
{1, if ik = 0,1, if ik = 1,
k = 1, . . . ,N0. (15)
Proof The claim is constructive; by introducing mapping (15) in
(13), it can be veri-fied by simple inspection that the conditions
are fulfilled.
-
J Optim Theory Appl (2012) 154:549572 555
Remark 3.2 Note that the problem of finding parameters i is
independent of theactual shape of the polytope P . The coefficients
obtained in (14) can be used for anytopologically equivalent
polytope (that is, with the same number of half-spaces).
3.1 Interdicted Tuples
By the choice of the cardinal N0 as in (9), the number of tuples
allowed by the reducedset of binary variables (11) may be greater
than the actual number of regions.
The tuples left unallocated will be labeled as interdicted, and
additional inequali-ties will have to be added to the extended set
of constraints (6). These restrictions arejustified by the fact
that, under construction (15), an unallocated tuple will not
enforcethe verification of any of the constraints of (6) (see
Remark 2.1). It then becomes ev-ident that the single constraint of
(7) has to be substituted by a set of constraints thatimplicitly
make all the unallocated tuples infeasible.
The next corollary of Proposition 3.1 provides the means to
construct an inequalitywhich renders a tuple infeasible:
Corollary 3.1 Let there be a tuple i {0,1}N0 . The N-dimensional
point that itdescribes, and exclusively this one by the
combinations in (12), is made infeasiblewith respect to the
constraint:
N0
k=1t ik , (16)
with t ik defined as in Proposition 3.1 and ]0,1[ a scalar.
Proof The left side of the inequality (16) will vanish only at
tuple i , and for the restof the tuples in the discrete set {0,1}N0
will give values greater than or equal to 1.Thus, the only point
made infeasible by inequality (16) is i .
The number of unallocated tuples may be significant, an upper
bound is given by
0 Nint 2log2 N 2log2 N1 1 = 2log2 N1 1, (17)with the bound
reached for the most unfavorable case of N = 2log2 N1 + 1.
If we associate to each of the unallocated tuples an inequality
as in Corollary 3.1,we negatively influence the speed of the
associated optimization algorithm. This canbe alleviated by noting
(as previously mentioned) that the association between re-gions and
tuples is arbitrary. One could then choose favorable associations
whichwill permit more than one tuple to be removed through a single
inequality. To thisend, we present the next proposition.
Proposition 3.2 Let there be a collection of tuples {i}i1,...,2d
{0,1}N0 , whichcompletely spans a d-facet3 of hypercube {0,1}N0 .
Let I be the set of the N0 d
3d denotes the degree of the facet, ranging from 0 for extreme
points to N0 1 for faces of the hypercube.
-
556 J Optim Theory Appl (2012) 154:549572
indices, which retains a constant value over all the tuples
{i}i1,...,2d composing thefacet. Then there exists the
constraint
kItk , (18)
which renders the tuples of the given facet (and only these
ones) infeasible.Variables tk and are taken as in Corollary 3.1
with tk associated to k , the
common value of variable k over the set of tuples {i}i1,...,2d
.
Proof Geometrically, the tuples are extreme points on the
hypercube {0,1}N0 andthe inequalities we are dealing with are
half-spaces, which separate the points of thehypercube. If a set of
tuples completely spans a d-facet, it is always possible to
isolatea half-space that separates the points of the d-facet from
the rest of the hypercube.
By a suitable association between feasible cells and tuples, we
may label as un-allocated the extreme points which compose entire
facets on the hypercube {0,1}N0 ,which permits to apply Proposition
3.2 in order to obtain constraints (26).
Remark 3.3 By writing Nint as a sum of consecutive powers of 2,
i.e.,
Nint =log2 Nint1
i=0bi2i ,
an upper bound Nhyp for the number of inequalities (26) can be
computed:
Nhyp =log2 Nint1
i=0bi log2 Nint, (19)
where bi {0,1}.
Remark 3.4 Note that (19) offers an upper bound for the number
of inequalities, butpractically the minimal value can be improved
depending on the method used forconstructing the separating
hyperplanes and of the partitioning of the tuples betweenthe
allocated and unallocated subsets.
3.2 Illustrative Example
As an illustration of the notions described in Sect. 3, we take
the following square:
0 10 11 0
1 0
[x1x2
]
1111
. (20)
As stated in this section, the number of binary variables
(similar to the formulation(6)) is N = 4, equal with the number of
half-spaces described in (20). The reduced
-
J Optim Theory Appl (2012) 154:549572 557
Fig. 1 Outer regions and their associated tuples
number of variables will be N0 = log2 4 = 2, according to (9).
Following the prob-lem formulation (14), the variables i can be
expressed, as in (10), by
i() = ai0 + ai11 + ai22.We associate to each region a tuple of
two values (1, 2) in lexicographical order.
The case of the 2nd half-space, associated to tuple (21, 22) =
(0,1), is detailed
in Fig. 1(a). Using (13), we obtain, as depicted in Fig. 1(b),
the feasible set of thecoefficients described by
a20 + a22 = 0, a20 1, a21 1.This represents a polytopic region
in the coefficients space (a0, a1, a2) R3 and,according to (14),
the nonemptiness is assured by the existence of at least a
feasiblecombination of coefficients leading to the mapping
2() = 1 + 1 2.This means that the region R2 is projected
from
[0 1
][x1x2
] 1 + M(1 + 1 2),
by taking (21, 22) = (0,1) (see Remark 2.1).
Furthermore, the same computations will be performed for the
rest of the regions,resulting in an extended system of linear
inequalities over mixed decision variables:
0 10 1
1 01 0
[x1x2
]
1 + M(1 + 2)1 + M(1 1 + 2)1 + M(1 + 1 2)1 + M(2 1 2)
.
As an exemplification of the considerations in Sect. 3.1, let
there be a polytopewith 5 hyperplanes. This means that the number
of binary variables has to be N0 =
-
558 J Optim Theory Appl (2012) 154:549572
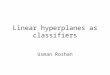
Fig. 2 Exemplification of separating hyperplanes techniques
log2 5 = 3 and then, Nint = 23 5 = 3 tuples will remain
unallocated; we choosethese to be (0,0,1), (1,0,1), and
(1,1,1).
By applying Corollary 3.1, we observe in Fig. 2(a) the 3
inequalities that separatethe unallocated tuples from the rest (for
simplicity, in the rest of the subsection, wewill use = 0.5):
(1 + 1 + 2 3) 0.5,(2 1 + 2 3) 0.5,(3 1 2 3) 0.5.
We observe in Fig. 2(b) that the tuples are positioned onto 2
edges, and consequently,using Proposition 3.2, 2 inequalities
suffice for separation:
(1 + 2 3) 0.5,(2 1 3) 0.5.
Lastly, recalling Remark 3.4, we note that, in this particular
case, a single inequality(as seen in Fig. 2(c)), is enough for
separating the unallocated tuples from the rest:
(0.321 + 1.762 + 2.133) 0.5.
4 Description of the Complement of a Union of Convex Sets
In the previous section, the basic reduction method was applied
for treatment of thecomplement of a convex set. A generic case will
be detailed in the following byconsidering the complement of a
union of convex (bounded polyhedral) sets P :=
l Pl :
CX(P) := cl(X \ P), (21)
-
J Optim Theory Appl (2012) 154:549572 559
with4
Pl :=Kl
kl=1R+(Hkl )
and
N :=
l
Kl .
This type of regions arises naturally in the context of
obstacle/collision avoidancewhen there is more than a single object
to be taken into account. In order to deal withthe complement of a
not convex region in the context of mixed-integer
techniques,several additional theoretical tools related to the
arrangements of the hyperplanes willbe introduced in the following.
The noninitiated reader may consult on this conceptof the
well-known books [25] and [26], some recent related articles [27,
28], and thereferences therein.
Definition 4.1 A collection of hyperplanes H = {Hi}i=1:N will
partition the space ina union of cells5 defined as follows:
A(H) =
l=1,..., (N)
(N
i=1Rl(i)(Hi )
)
Al
, (22)
where sign tuple l {,+}N denotes feasible combinations of
regions (4) obtainedfor the hyperplanes in H, and (N) denotes the
number of feasible cells.
Several computational aspects are of interest. The number of
feasible cells, (N),(in relation with the space dimensiond and the
number of hyperplanesN ) isbounded by Bucks formula [29]:
(N) d
i=0
(N
i
), (23)
with equality satisfied if the hyperplanes are in general
position6 and X = Rn.An efficient algorithm for describing (22),
based on reverse search that runs in
O(N (N) lp(N,d)) time and O(N,d) space, was presented in [30]
and implementedin [31].
4The + superscript was chosen for the homogeneity of notation,
equivalently one could have chosen anycombination of signs in the
half-space representation (4) in order to describe the polyhedral
regions Pl .5The relative interior of any two cells is disjoint,
but their boundaries may have one of the hyperplanes Hias a common
element.6We call a hyperplane arrangement to be in general position
whenever any small change in the positionof the composing
hyperplanes does not change the number of cells.
-
560 J Optim Theory Appl (2012) 154:549572
Note that there exists a subset {Bl}l=1,..., b(N) of feasible
polyhedral cells from(22) (with b(N) (N)) which describes region
(21):
CX(P) =
l=1,..., b(N)Bl, (24)
such that, for any l, there exists a unique i for which, Bl = Ai
and Ai P = .In (6), a single binary variable was associated to a
single inequality, but the mecha-
nism can be applied similarly to more inequalities (e.g., the
ones describing one of thecells of (24)). Thus, one can describe
(22) in an extended space of state + auxiliarybinary variables as
follows:
...
l(1)h1x l(1)k1 + Ml...
l(N)hNx l(N)kN + Ml
Bl
...
(25)
and condition
l= b(N)
l=1l b(N) 1, (26)
which implies that at least a set of constraints will be
verified.Construction (25)(26) will permit, through projection
along the binary variables
l (see (8)), to obtain any of the cells of the union
(24).Analogously to Sect. 3, we propose, in the following, the
reduction of the num-
ber of binary variables by associating to each of the cells a
unique tuple. The binarypart will be computed following the
constructive result in Proposition 3.1 and usedaccordingly in (25).
Additional inequalities that render infeasible the unallocated
tu-ples, are introduced as in Proposition 3.2.
A few remarks relating to the number of hyperplanes and their
corresponding ar-rangement are in order.
Remark 4.1 The number of inequalities in (25) can be reduced by
observing that notall the hyperplanes of H are active in a
particular cell, and thus they can be discardedfrom the final
representation.
Remark 4.2 Note that if we discard the linear structure and
allow a nonlinear formu-lation involving products of binary
variables, the hyperplane arrangements (22) can
-
J Optim Theory Appl (2012) 154:549572 561
be represented as
...
hix ki + M
l=1,..., b(N)l(i)=
l,
hix ki + M
l=1,..., b(N)l(i)=+
l,
...
(27)
for all sign tuples l associated to cells Bl from covering (24).
We have used the factthat the cells of (24) use the same
half-spaces (up to a sign), and thus they can beconcatenated. The
method presented in [32] transforms an inequality with
nonlinearbinary components into a set of inequalities with linear
binary components. However,this can be made only at the expense of
introducing additional binary variables, whichin the end gives a
larger problem than the one presented in (25)(26).
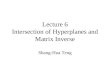
4.1 Exemplification of Hyperplane Arrangements
Consider the following illustrative example depicted in Fig. 3,
where the comple-ment of the union of two triangles (P = P1 P2)
represents the feasible region. Wetake H = {Hi}i=1:4 the collection
of N = 4 hyperplanes (given as in (3)) which de-fine P1, P2.
We observe that the bound given in (23) is reached, that is, we
have 11 cells (ob-tained as in the arrangement (22)). From them, a
total of 9, which we denote hereas B1, . . . ,B9, describe the not
convex region (21). To each of them, we associate aunique tuple
from {0,1}N0 as seen in Fig. 3 with N0 = log2 9 = 4.
Fig. 3 Exemplification of hyperplane arrangement
-
562 J Optim Theory Appl (2012) 154:549572
As per Proposition 3.1 and (25), we are now able to write the
set of inequali-ties (28).
h3x k3h4x k4
+ M( 1 + 2 + 3 + 4)}
B1,
h2x k2h3x k3
h4x k4+ M(1 + 1 + 2 + 3 4)
B2,
h1x k1h2x k2
h3x k3+ M(1 + 1 + 2 3 + 4)
B3,
h1x k1h3x k3
+ M(2 + 1 + 2 3 4)}
B4,
h1x k1h2x k2
h3x k3h4x k4
+ M(1 + 1 2 + 3 + 4)
B5,
h2x k2h4x k4
+ M(2 + 1 2 + 3 4)}
B6,
h1x k1h2x k2
h4x k4+ M(2 + 1 2 3 + 4)
B7,
h1x k1h3x k3
h4x k4+ M(3 + 1 2 3 4)
B8,
h1x k1h2x k2h3x k3h4x k4
+ M(1 + 1 2 + 3 + 4)
B9.
(28)
Note that, in the above set, we have simplified the description
by cutting the re-dundant hyperplanes in a cell representation
(e.g., for cell A1, 2 hyperplanes sufficefor a complete
description).
-
J Optim Theory Appl (2012) 154:549572 563
Since only 9 tuples, from a total number of 16, are associated
to cells, we need toadd constraints to the problem such that the
remaining 7 unallocated tuples will neverbe feasible. Using
Corollary 3.1, we obtain:
(2 1 2 + 3 + 4) 0.5,(3 1 2 3 + 4) 0.5,(3 1 2 + 3 4) 0.5,(4 1 2 3
4) 0.5,(2 1 + 2 3 + 4) 0.5,(3 1 + 2 3 4) 0.5,(2 1 + 2 + 3 4)
0.5.
(29)
We observe that for the 7 unallocated tuples, 4 of them,
(1,1,0,0), (1,1,0,1),(1,1,1,0), and (1,1,1,1), form a 2-facet of
the hypercube {0,1}4. Tuples (1,0,1,0)and (1,0,1,1) form an edge
and (1,0,0,1) is on a vertex. We can now apply Propo-sition 3.2 and
obtain the following constraints:
(2 1 2) 0.5,(2 1 + 2 3) 0.5,
(2 1 + 2 + 3 4) 0.5.(30)
Note that we were able to diminish the number of inequalities
from 7 in (29) to only3 in (30): the first 4 constraints of (29)
are replaced by the 1st constraint of (30). Thesame holds for the
next 2 that correspond to the 2nd, and for the last that is
identicalwith the 3rd.
5 Refinements for the Complement of a Union of Convex Sets
As seen in [22], palliatives for reducing the computational load
exist but ultimately,the computation time is in the worst case
scenario exponentially dependent on thenumber of binary variables,
which in turn depends on the number of cells of thehyperplane
arrangements (see (23)). We conclude then that the problem
becomesprohibitive for a relatively small number of polyhedra in P,
and that any reduction inthe number of cells is worthwhile and
should be pursued.
This can be accomplished in two complementary ways. Firstly, we
note that bound(23) is reached for a given number of hyperplanes if
and only if they are in generalposition. As such, particular
classes of polyhedra may somewhat reduce the actualnumber of cells
in arrangement (22), and consequently, the number of auxiliary
bi-nary variables. In increasing order of their versatility, we may
mention hypercubes,orthotopes, parallelotopes, and zonotopes as
classes of interest (for a computation ofthe number of cells (see,
[33])).
The other direction, which we chose to pursue in the rest of the
paper, is reducingthe number of cells that describe (21).
-
564 J Optim Theory Appl (2012) 154:549572
In [22], we have proposed a hybrid scheme which permits to
express (21) as aunion of the cells of (24) which intersect P, and
of the regions (in the sense of (4))which describe C(P), where P
denotes the convex hull of P.
Alternatively, the merging of adjacent cells into possibly
overlapping regions,which describe (21), is discussed in [23]. This
results in a reduced representation,both in number of cells and of
interdicting constraints. In the next subsection, wedetail the
merging techniques used and show how the complexity of the problem
isreduced.
5.1 Cell Merging
Recall that any of the cells of (24) is described by a unique
sign tuple (Bl l).As such, we obtain that the cells are disjunct
and cover the entire feasible space. Forour purposes, we are
satisfied with any collection of regions not necessarily
disjointwhich covers the feasible space. In this context, we may
ask if it is not possible tomerge the existing cells of (24) into a
reduced number of regions which will stillcover region (21). Note
that by reducing the number of regions, the number of
binaryauxiliary variables will also decrease substantially.
We can formally represent the problem by requiring the existence
of a collectionof regions,
CX(P) =
k=1,..., c(N)Ck, (31)
which verifies next conditions:
the new polyhedra are formed as unions of the old ones (i.e.,
for any k there existsa set Ik which selects indices from 1, . . .
, b(N) such that Ck = iIk Bi ), the union is minimal, that is, the
number c(N) of regions is minimal.Existing merging algorithms are
usually computationally expensive, but here we
can simplify the problem by noting two properties of the cells
in (24): the sign tuples l describe an adjacency graph since any
two cells whose sign tuples
differ at only one position are neighbors, the union of any two
adjacent cells is a polyhedra.
In order to construct (31), we may use merging algorithms (see,
for example, [34],which adapts a branch and bound algorithm to
merge cells of a hyperplane ar-rangement), or we can pose the
problem in the Boolean algebra framework. Themerging problem of
regions from (24) is functionally identical to the minimizationof a
Boolean function given in the sum of products form. A cell
describing the(in)feasible region (21) corresponds to a 1 (0) value
in the truth table at the po-sition determined by its associated
sign tuple, whereas infeasible sign tuples corre-spond to do not
care values. It is then straightforward to apply minimization
algo-rithms (Karnaugh maps, the QuineMcCluskey algorithm, or the
Espresso heuristiclogic minimizer) in order to obtain Boolean
minterms who describe the merged cellsof (31). We note that a
similar approach was proposed in [35] in order to deal
withpolyhedral piecewise affine systems.
-
J Optim Theory Appl (2012) 154:549572 565
Remark 5.1 Note that a region Ck is described by at most N f
hyperplanes, wheref denotes the number of indices in the sign
tuples which flip the sign. It makes sensethen to, not only reduce
the number of regions, but also to maximize the number ofcells that
go into the description of a region from (31).
In Algorithm 1, we sketch the notions presented in this
section.
Algorithm 1 Scheme for representing C(P)Input P
1 obtain the cell arrangement as in (22) for H2 obtain the
feasible cells (24) and merge them in representation (31)3 get the
number c(N) of feasible regions and the number N0 of auxiliary
binary
variables4 partition the tuples of {0,1}N0 such that Proposition
3.2 can be efficiently applied5 create the extended polyhedron (25)
and add the constraints (26)
Note that the steps 1 and 2 are the most computationally
expensive. For the firststep, an efficient algorithm for describing
(22), based on reverse search that runs inO(N (N) lp(N,d)) time and
O(N,d) space, was detailed in [30] and implementedin [31]. For the
second step, Boolean algebra techniques have been used: for a
smallnumber of hyperplanes, exact methods like Karnaugh maps prove
to be effective.For higher numbers, the heuristic Espresso logic
minimizer can be used. The latterprovides solutions very close to
the optimum while being more efficient and reduc-ing memory usage
and computation time by several orders of magnitude relative
toclassical methods (see [36]).
5.2 Exemplification of Hyperplane Arrangements with Cell
Merging
We revisit here the example provided in Sect. 4.1 and apply the
results presented inSect. 5.1 in order to show the
improvements.
For this simple case, we apply, as seen in Fig. 4, a Karnaugh
diagram and obtainthat the feasible region (21) is expressed by a
union as in (25).
As seen from the Karnaugh diagram from Fig. 4, we obtain 4
overlapping regions:C1 = B1 B2 B3 B4, C2 = B4 B5 B6, C3 = B6 B7 B8
B1 and C4 =B8 B9 B1 B2, which we depict in Fig. 5. Consequently, we
note that N0 = 2
Fig. 4 Karnaugh diagram forobtaining the reduced
cellrepresentation
-
566 J Optim Theory Appl (2012) 154:549572
Fig. 5 Exemplification ofhyperplane arrangement withmerged
regions
auxiliary binary variables suffice in coding the regions. As for
Proposition 3.1 and(25), we are now able to write the following set
of inequalities (we attach to each ofthe regions a tuple in
lexicographical order):
h3x k3 + M( 1 + 2)}
C1,
h1x k1h4x k4
+ M(1 + 1 2)}
C2,
h4x k4 + M(1 1 + 2)}
C3,
h1x k1h2x k2
+ M(2 1 2)}
C4.
(32)
Note that, in addition to reducing the number of regions in (32)
comparative with(28), we also have reduced the number of
hyperplanes appearing in the regions half-space representation (see
Remark 3.3).
6 Numerical Considerations
In this section, we will test the computation time improvements
for our approachversus the standard technique encountered in the
literature. As previously mentioned,a MI problem is NP-hard in the
number of binary variables (due to the fact that thealgorithms
implement branch-and-bound techniques and as such, in the worst
casescenario, they need to iterate through all the branches defined
by the binary searchtree variables). Therefore, even a small
reduction will render sensible improvements.
The complexity of the MI algorithm with constraints in the
classical form (6)(7)will be of the order of O(2N p(N + 1, d)),
where p(n,d) denotes either lp(n, d) orqp(n, d), as it is required.
Using the alternative formulation proposed in Sect. 3, we
-
J Optim Theory Appl (2012) 154:549572 567
Fig. 6 Comparative test forcomputation time for classicaland
enhanced methodtimeaxis in logarithmic scale
Table 1 Numerical values forthe solving of an MIoptimization
problem underclassical and enhanced methods
No. ofhyperplanes
5 10 15 20 25 50 100
Classical 9.91 64.06 91.74 511.47 306.04 Enhanced 1.14 0.81 0.59
4.84 4.18 3.66 2.94
obtain the complexity as
O(2log2 N p(N + log2 N 1), d
) = O(N p(N,d)). (33)We consider the worst case scenario for the
mixed-integer problem, that is, the
optimization algorithm will need to pass through each of the
possible combinationsprovided by the binary variables. In the case
of formulation (6)(7), this leads to aNP complexity in the number
of lp/qp problems to be solved. On the other hand,the formulation
shown in (33), through the reduction of binary variables, provides
apolynomial complexity.
To illustrate these computational gains, we will compare the
times of executionfor both schemes as follows: the computational
time will be measured and averagedfor 10 samples of 2D polytopes
with the same number of support hyperplanes; fur-thermore, the
procedure will be iterated by changing the number of hyperplanes
from4 to 25. The results are depicted in Fig. 6 on a semilogaritmic
scale and, as it can beseen, there are significant improvements. In
fact, the differences may be even morepronounced since, under
default settings, the MI algorithm over the classical methodstopped
computing the optimum value after a maximum number of iterations
wasreached (the MI algorithm used was the one described in
[12]).
Similar results are shown in Table 1, where we observe the
evident improvementof our method relative to the classical
technique.
In Sect. 4, a method for describing in the MI formalism of the
complement ofa possibly not connected union of polytopes was
presented. The main drawback isthat in both classical and reduced
formulation, the problem depends on the number
-
568 J Optim Theory Appl (2012) 154:549572
of cells. Supposing that the hyperplanes from the hyperplane
arrangement (24) be inrandom position, we obtain, for formulation
(25)(26), a complexity of order
O(2 b(N) p(N Nd + 1), d), (34)which can be further reduced,
using the techniques from Sect. 3, to
O(2log2 b(N) p(N Nd + 1, d)) = O( b(N) p(Nd+1, d)). (35)Again,
we observe that the mixed-integer problem becomes polynomial in the
num-ber of branches: in the worst case, we have b subproblems to
solve, and b which in turn is given by the polynomial expression
(23). However, the problem isstill challenging due to the number of
cells (see (23)). By reducing the number of cellsas in Sect. 5, it
is possible to significantly reduce the computation time. For
exempli-fication, take the example depicted in Figs. 3 and 5. We
observe that in this particularcase, we were able to reduce the
representation from 9 cells to only 4. Presumably,for a higher
number of hyperplanes, the gain will be even more pronounced.
7 Collision Avoidance Example
A number of commonly found situations in the control related to
Multi-Agent Sys-tems imply a cost function that has to be
minimized, while in the same time, the agentavoids collision with
obstacles and other agents. To solve this problem, there
existsvarious methods. Arguably, they can be gathered in methods
which penalize throughthe cost function as the violation of the
constraints (e.g., Potential Field Method [37]and Navigation
Functions [38]), and methods which impose hard constraints that
maynot be broken. The latter group usually employs receding horizon
techniques as theynaturally take into account constraints [7, 15].
In this illustrative example, we willdescribe an agent that has to
navigate its way around a group of fixed obstacles. Weconsider the
dynamics of the agent described by a LTI system as follows:
k+1 = Ak + Buk. (36)The agent model is used in a predictive
control (see [14]) context which permits
the use of not convex state constraints for obstacle avoidance
behavior.An optimal control action u is obtained from the control
sequence u :={
uk|k, uk+1|k, . . . , uk+N1|k}
as a result of the optimization problem:
u = arg minu
(
Tk+N |kP k+N |k +N1
l=1Tk+l|kQk+l|k +
N1
l=0uTk+l|kRuk+l|k
)
,
s.t.:
{k+l|k = Ak+l1|k + Buk+l1|k,k+l|k C(P), l = 1, . . . ,N.
(37)
Here, Q 0, R > 0 are the weighting matrices, P 0 defines the
terminal cost andP is an union of polytopes describing the
obstacles.
-
J Optim Theory Appl (2012) 154:549572 569
Fig. 7 Interdicted region in thestate space
As a practical application, we consider a linear system
(vehicle, pedestrian or agentin general form), whose dynamics are
described by
A =
0 0 1 00 0 0 10 0
m0
0 0 0 m
, B =
0 00 01m
00 1
m
, (38)
where = [x y vx vy]T , u = [ux uy]T are the state and the input
of the system. Withthe components of the state being (x, y) the
position, and (vx, vy) the velocities ofthe agent, m is the mass of
the agent and its damping factor.
We consider the position component of the agent state to be
constrained by 4obstacles as shown in Fig. 7.
Considering the 14 hyperplanes which describe the polyhedra
associated with theobstacles, we have (14) = 106 regions obtained
as in (22). Additionally, we observethat 10 of the cells will
describe the interdicted regions, and the rest, b(14) = 96will
describe the feasible region, as shown in (24). Furthermore, we
apply the notionsfrom Sect. 5.1 to obtain a reduced representation
for the feasible region as in (31).We observe that the number of
cells is substantially reduced, from b(14) = 96 to c(14) = 11,
which warrants in turn a reduction of the auxiliary binary
variables from7 to 4 that, for a worst case scenario, equals to an
eightfold speed up. In Fig. 8(a),we depict the cells of (24) and
the obstacles, while in Fig. 8(b) we show the covering(31) of
merged cells.
We apply the predictive control strategy for horizon N = 3 and
cost matrices Q =105 I4, R = I2 and P = 105 I4, and obtain the
trajectory depicted in Fig. 9.
A last aspect of interest is the scalability of the problem for
a larger number ofagents/obstacles. Obviously, the results depend
greatly on the number of sets, thenumber of hyperplanes defining
them and their relative positions. We depict in Table 2a few cases
(showing the number of obstacles, hyperplanes, and regions (6)(8)
and(19), respectively) and observe that the improvements are (at
least for the examplesconsidered) significant.
-
570 J Optim Theory Appl (2012) 154:549572
Fig. 8 Cell partitionings of the feasible region
Fig. 9 Simulations of agenttrajectories
Table 2 Complexity analysiswith increased numbers
ofobstacles
#P #Hi #Ai #Bi #Ci
5 19 210 191 137 24 295 266 169 30 496 449 23
8 Concluding Remarks
In this paper, we revisit a technique, which transforms a not
convex and possiblynot connected region into a polyhedra in an
augmented space (state and auxiliarybinary variables) through the
use of hyperplane arrangements. With respect to previ-ous results,
we minimized the number of cells describing the feasible region
throughmerging methods and discussed an improvement of the
optimization problem suchthat the number of additional constraints
is minimized. These numerical improve-
-
J Optim Theory Appl (2012) 154:549572 571
ments were presented, tested, and discussed on applications
concerning the obstacleavoidance control problem.
Acknowledgements The research of Ionela Prodan is financially
supported by the EADS CorporateFoundation (091-AO09-1006). Florin
Stoicans work was carried out in Supelec, during the tenure ofa
CARNOT C3S fellowship. The authors would like to thank Professor
Panos M. Pardalos, as well asthe anonymous reviewers for their
useful comments and remarks that helped in improving the
overallpresentation of this paper.
References
1. Grundel, D., Murphey, R., Pardalos, P.: Cooperative Systems,
Control and Optimization, vol. 588.Springer, Berlin (2007)
2. Grundel, D., Pardalos, P.: Theory and Algorithms for
Cooperative Systems, vol. 4. World Scientific,Singapore (2004)
3. Earl, M., DAndrea, R.: Modeling and control of a multi-agent
system using mixed integer linear pro-gramming. In: Proceedings of
the 40th IEEE Conference on Decision and Control, Orlando,
Florida,USA, vol. 1, pp. 107111 (2001)
4. Osiadacz, A.: Integer and combinatorial optimization. In:
Nemhauser, G.L., Wolsey, L.A. (eds.)Wiley-Interscience Series in
Discrete Mathematics and Optimization. Wiley, New York (1988).
In-ternational Journal of Adaptive Control and Signal Processing,
4(4), 333344 (1990)
5. Jnger, M., Liebling, T., Naddef, D., Nemhauser, G.,
Pulleyblank, W., Reinelt, G., Rinaldi, G.,Wolsey, L.: 50 Years of
Integer Programming 19582008: From the Early Years to the
State-of-the-Art. Springer, Berlin (2009)
6. Schouwenaars, T., De Moor, B., Feron, E., How, J.: Mixed
integer programming for multi-vehiclepath planning. In: Proceedings
of the 2nd IEEE European Control Conference, Porto, Portugal,
pp.26032608. (2001)
7. Richards, A., How, J.: Model predictive control of vehicle
maneuvers with guaranteed completiontime and robust feasibility.
In: Proceedings of the 24th American Control Conference, Portland,
Ore-gon, USA, vol. 5, pp. 40344040 (2005)
8. Ousingsawat, J., Campbell, M.: Establishing trajectories for
multi-vehicle reconnaissance. In: Pro-ceedings of AIAA Guidance,
Navigation and Control Conference, Providence, Rhode Island,
USA,pp. 21882199 (2004)
9. Beard, R., McLain, T., Goodrich, M., Anderson, E.:
Coordinated target assignment and intercept forunmanned air
vehicles. Proc. IEEE Trans. Robot. Autom. 18(6), 911922 (2002)
10. Richards, A., Bellingham, J., Tillerson, M., How, J.:
Coordination and control of multiple UAVS. In:Proceedings of AIAA
Guidance, Navigation and Control Conference. Monterey, CA
(2002)
11. Schumacher, C., Chandler, P., Pachter, M.: UAV task
assignment with timing constraints. In: Proceed-ings of AIAA
Guidance, Navigation and Control Conference, Austin, Texas
(2003)
12. Bemporad, A., Morari, M.: Control of systems integrating
logic, dynamics, and constraints. Automat-ica 35, 407428 (1999)
13. Bemporad, A., Borrelli, F., Morari, M.: Optimal controllers
for hybrid systems: stability and piecewiselinear explicit form.
In: Proceedings of the 39th IEEE Conference on Decision and
Control, Sydney,NSW, Australia, pp. 18101815 (2000)
14. Mayne, D., Rawlings, J., Rao, C., Scokaert, P.: Constrained
model predictive control: stability andoptimality. Automatica 36,
789814 (2000)
15. Camacho, E.F., Bordons, C.: Model Predictive Control.
Springer, Berlin (2004)16. Bellingham, J., Richards, A., How, J.:
Receding horizon control of autonomous aerial vehicles. In:
Proceedings of the 21th American Control Conference, Anchorage,
Alaska, USA, vol. 5, pp. 37413746 (2002)
17. Prodan, I., Olaru, S., Niculescu, S.: Predictive control for
tight group formation of multi-agent sys-tems. In: Proceedings of
the 18th IFAC World Congress, Milano, Italy, pp. 138143 (2011)
18. Stoican, F., Olaru, S., Seron, M., De Don, J.: Reference
governor for tracking with fault detectioncapabilities. In:
Proceedings of the 2010 Conference on Control and Fault Tolerant
Systems, Nice,France, pp. 546551 (2010)
-
572 J Optim Theory Appl (2012) 154:549572
19. Garey, M., Johnson, D.: Computers and intractability. A
Guide to the Theory of NP-Completeness.A Series of Books in the
Mathematical Sciences. Freeman, San Francisco (1979)
20. Earl, M., DAndrea, R.: Iterative MILP methods for
vehicle-control problems. IEEE Trans. Robot.21(6), 11581167
(2005)
21. Vitus, M., Pradeep, V., Hoffmann, G., Waslander, S.L.,
Tomlin, C.J.: Tunnel-milp: path planning withsequential convex
polytopes. In: Proceedings of AIAA Guidance, Navigation and Control
Conference,Honolulu, Hawaii, USA (2008)
22. Stoican, F., Prodan, I., Olaru, S.: On the hyperplanes
arrangements in mixed-integer techniques. In:Proceedings of the
30th American Control Conference, San Francisco, CA, USA, pp.
18981903(2011)
23. Stoican, F., Prodan, I., Olaru, S.: Enhancements on the
hyperplane arrangements in mixed integertechniques. In: 50th IEEE
Conference on Decision and Control and European Control
Conference,Orlando, FL, USA, pp. 39863991 (2011)
24. Olaru, S., Dumur, D.: Avoiding constraints redundancy in
predictive control optimization routines.IEEE Trans. Autom. Control
50(9), 14591465 (2005)
25. Orlik, P., Terao, H.: Arrangements of Hyperplanes, vol. 300.
Springer, Berlin (1992)26. Ziegler, G.: Lectures on Polytopes.
Springer, Berlin (1995)27. Orlik, P.: Hyperplane arrangements. In:
Floudas, C.A., Orlik, P.M. (eds.) Encyclopedia of Optimiza-
tion, pp. 15451547. Springer, New York (2009)28. Pardalos, P.:
Hyperplane arrangements in optimization. In: Floudas, C.A.,
Pardalos, P.M. (eds.) Ency-
clopedia of Optimization, pp. 15471548. Springer, New York
(2009)29. Buck, R.: Partition of Space. Am. Math. Mon. 50(9),
541544 (1943)30. Avis, D., Fukuda, K.: Reverse search for
enumeration. Discrete Appl. Math. 65(1), 2146 (1996)31. Ferrez,
J.A., Fukuda, K.: Implementations of lp-based reverse search
algorithms for the zonotope
construction and the fixed-rank convex quadratic maximization in
binary variables using the zram andthe cddlib libraries. Tech.
rep., Mcgill (2002)
32. Kobayashi, K., Imura, J.: Modeling of discrete dynamics for
computational time reduction of ModelPredictive Control. In:
Proceedings of the 17th International Symposium on Mathematical
Theory ofNetworks and Systems, Kyoto, Japan, pp. 628633 (2006)
33. Zaslavsky, T.: Counting the faces of cut-up spaces. Am.
Math. Soc. 81, 5 (1975)34. Geyer, T., Torrisi, F., Morari, M.:
Optimal complexity reduction of piecewise affine models based
on
hyperplane arrangements. In: Proceedings of the 23th American
Control Conference, Boston, Mas-sachusetts, USA, vol. 2, pp.
11901195 (2004)
35. Geyer, T., Torrisi, F., Morari, M.: Optimal complexity
reduction of polyhedral piecewise affine sys-tems. Automatica
44(7), 17281740 (2008)
36. Rudell, R., Sangiovanni-Vincentelli, A.: Espresso-mv:
algorithms for multiple-valued logic minimiza-tion. In: Proceedings
of the IEEE Custom Integrated Circuits Conference, pp. 230234
(1985)
37. Olfati-Saber, R., Murray, R.: Distributed cooperative
control of multiple vehicle formations usingstructural potential
functions. In: Proceedings of the 15th IFAC World Congress,
Barcelona, Spainpp. 346352 (2002)
38. Rimon, E., Koditschek, D.: Exact robot navigation using
artificial potential functions. IEEE Trans.Robot. Autom. 8(5),
501518 (1992)
Enhancements on the Hyperplanes Arrangements in Mixed-Integer
Programming TechniquesAbstractIntroductionPreliminariesBasic
IdeasInterdicted TuplesIllustrative Example
Description of the Complement of a Union of Convex
SetsExemplification of Hyperplane Arrangements
Refinements for the Complement of a Union of Convex SetsCell
MergingExemplification of Hyperplane Arrangements with Cell
Merging
Numerical ConsiderationsCollision Avoidance ExampleConcluding
RemarksAcknowledgementsReferences