Embed Size (px)
Citation preview
Environmental Monitoring in Wind Farms based on Wireless Sensor and Actor Networks
João Carneiro Instituto Superior Técnico
ABSTRACT In this paper, we describe a bat monitoring and deterrent system based on wireless sensor and actor networks. Using a wireless sensor network, we built a system capable of capturing data and sending it using GPRS to a remotely located server for non-volatile storage. Using a wireless sensor and actor network, we built a reactive system that triggers a reaction in the sequence of detecting an event. While the complete physical system was not assembled as some of the hardware and signals were simulated, through this work we could determine the feasibility of the solution and determine aspects that require further research.
Keywords Bat monitoring, bat exclusion, wind farms, barotraumas, wireless sensor network, wireless sensor and actor network.
1. BACKGROUND AND MOTIVATION Pollution and its effects over the environment are one of today’s highest concerns. Natural resource scarcity is each day becoming more evident to everyone’s life. Renewable, non-polluting energies are today the main solution, being wind energy the fastest growing type. A total world capacity of 94.1 gigawatts was already installed at the end of 2007, producing about 1% of the electricity. The installation of wind farms helps us to fight these problems but face us with new unpredictable issues such as its impact on wildlife.[1]
Wind farms are known to be the cause for high bat mortality. While the reason for this issue is still unknown, both barotrauma[2] – bat’s death due to pressure difference caused by the moving blades - and bat collision with wind turbines have already been observed.[3] Nevertheless it is a fact that bats are dying at an average rate of 1 to 2.5 bats per megawatt every year. The annual number of bat fatalities expected for 2010 is predicted to be over 150,000 bats. Several bat species will be endangered.[4]
Bats are long-lived and have low reproductive rate. Living over 20 years and having only one offspring per year makes them particularly vulnerable to such mortality rate. Bats are of high importance for pest control as they are the primary predator for night-flying insects. Each can eat about half of its body weight in insects every night, assuring insects’ population equilibrium.[5]
Monitoring bat activity is already mandatory before, during and after wind farms installation in many countries. Tools
to assist biologists in monitoring and understanding bats’ behavior exist but can be considered primitive when compared to already available technologies. Existing bat detectors are handheld devices equipped with a special microphone to capture bats’ ultrasound signals. These echolocation and social waves are then either transformed into human audible sounds and reproduced or stored for later analysis. Nowadays monitoring is performed using these bat detectors in regular field trips.
In 2003 the Bat and Wind Energy Cooperative (BWEC) was formed from an association between several organizations related to both wind energy and wildlife or bats. BWEC’s objective is to develop solutions to minimize or prevent bats’ mortality at wind power turbines. An ultrasound emitting device has already been developed and tested. Although it isn’t yet possible to guarantee its success, it has already shown promising results influencing bats’ behavior.[6][7]
In times where technology evolves on a daily basis the invention of new inexpensive solutions is highly encouraged. These new tools overcome the existing ones by requiring less work while achieving better results and offering more functionality. These new technologies also allow the conception of new tools to previously unsolvable problems.
2. OBJECTIVE The project described in this paper has the objective of creating a solution with two main purposes: firstly, create an invaluable remote monitoring tool for biologists who study bats, helping them to better understand their behavior while releasing them from the currently required field visits; and secondly, create a repelling mechanism that can detect a bat and react to its presence, enabling a repellent every time a bat is detected by the system.
This project was developed with the main purpose of helping scientists study the influence of wind farms in bats’ natural behavior. Moreover its implementation should help to reduce bats’ mortality by assuring they are kept away from the deadly wind turbines’ blades. Nevertheless this tool could be used in any other situation where the same results are expected.
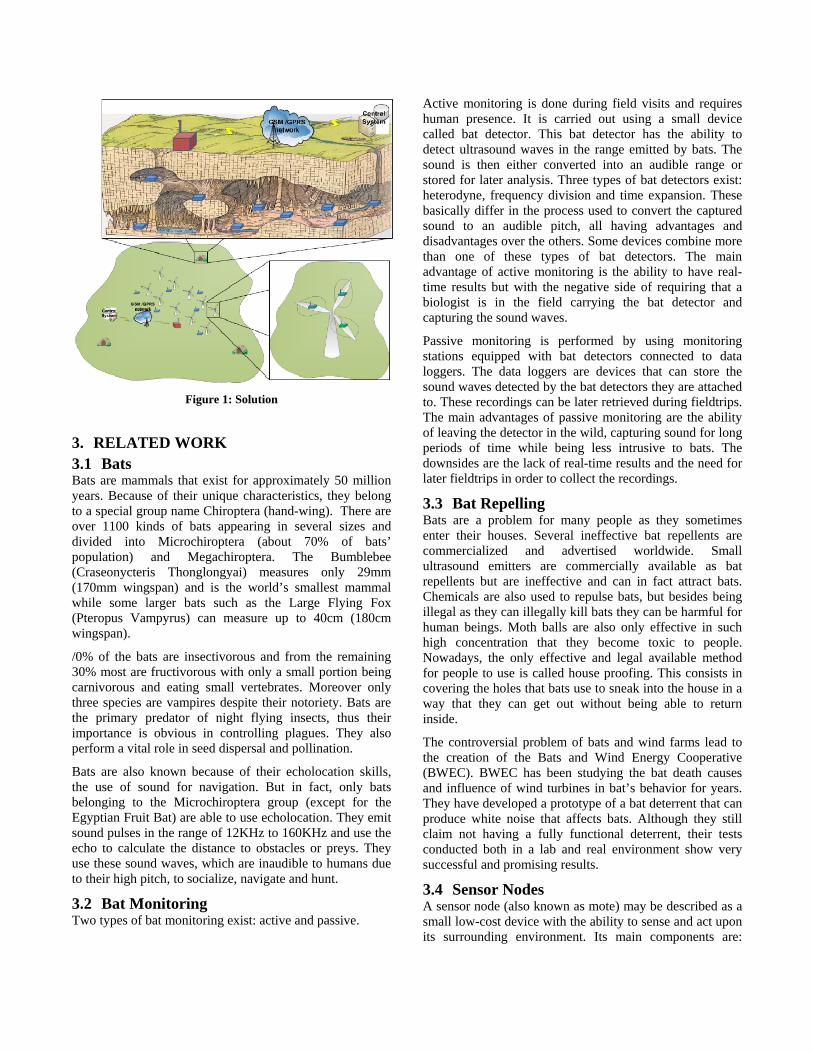
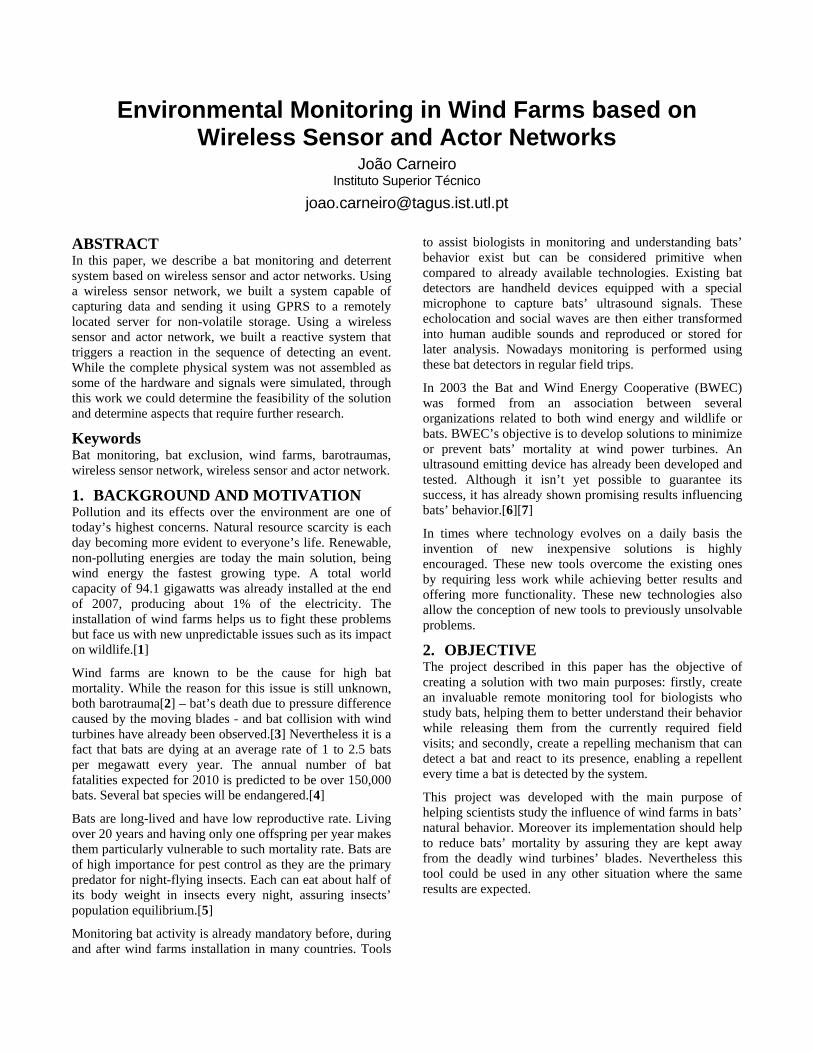
Figure 1: Solution
3. RELATED WORK 3.1 Bats Bats are mammals that exist for approximately 50 million years. Because of their unique characteristics, they belong to a special group name Chiroptera (hand-wing). There are over 1100 kinds of bats appearing in several sizes and divided into Microchiroptera (about 70% of bats’ population) and Megachiroptera. The Bumblebee (Craseonycteris Thonglongyai) measures only 29mm (170mm wingspan) and is the world’s smallest mammal while some larger bats such as the Large Flying Fox (Pteropus Vampyrus) can measure up to 40cm (180cm wingspan).
/0% of the bats are insectivorous and from the remaining 30% most are fructivorous with only a small portion being carnivorous and eating small vertebrates. Moreover only three species are vampires despite their notoriety. Bats are the primary predator of night flying insects, thus their importance is obvious in controlling plagues. They also perform a vital role in seed dispersal and pollination.
Bats are also known because of their echolocation skills, the use of sound for navigation. But in fact, only bats belonging to the Microchiroptera group (except for the Egyptian Fruit Bat) are able to use echolocation. They emit sound pulses in the range of 12KHz to 160KHz and use the echo to calculate the distance to obstacles or preys. They use these sound waves, which are inaudible to humans due to their high pitch, to socialize, navigate and hunt.
3.2 Bat Monitoring Two types of bat monitoring exist: active and passive.
Active monitoring is done during field visits and requires human presence. It is carried out using a small device called bat detector. This bat detector has the ability to detect ultrasound waves in the range emitted by bats. The sound is then either converted into an audible range or stored for later analysis. Three types of bat detectors exist: heterodyne, frequency division and time expansion. These basically differ in the process used to convert the captured sound to an audible pitch, all having advantages and disadvantages over the others. Some devices combine more than one of these types of bat detectors. The main advantage of active monitoring is the ability to have real-time results but with the negative side of requiring that a biologist is in the field carrying the bat detector and capturing the sound waves.
Passive monitoring is performed by using monitoring stations equipped with bat detectors connected to data loggers. The data loggers are devices that can store the sound waves detected by the bat detectors they are attached to. These recordings can be later retrieved during fieldtrips. The main advantages of passive monitoring are the ability of leaving the detector in the wild, capturing sound for long periods of time while being less intrusive to bats. The downsides are the lack of real-time results and the need for later fieldtrips in order to collect the recordings.
3.3 Bat Repelling Bats are a problem for many people as they sometimes enter their houses. Several ineffective bat repellents are commercialized and advertised worldwide. Small ultrasound emitters are commercially available as bat repellents but are ineffective and can in fact attract bats. Chemicals are also used to repulse bats, but besides being illegal as they can illegally kill bats they can be harmful for human beings. Moth balls are also only effective in such high concentration that they become toxic to people. Nowadays, the only effective and legal available method for people to use is called house proofing. This consists in covering the holes that bats use to sneak into the house in a way that they can get out without being able to return inside.
The controversial problem of bats and wind farms lead to the creation of the Bats and Wind Energy Cooperative (BWEC). BWEC has been studying the bat death causes and influence of wind turbines in bat’s behavior for years. They have developed a prototype of a bat deterrent that can produce white noise that affects bats. Although they still claim not having a fully functional deterrent, their tests conducted both in a lab and real environment show very successful and promising results.
3.4 Sensor Nodes A sensor node (also known as mote) may be described as a small low-cost device with the ability to sense and act upon its surrounding environment. Its main components are:
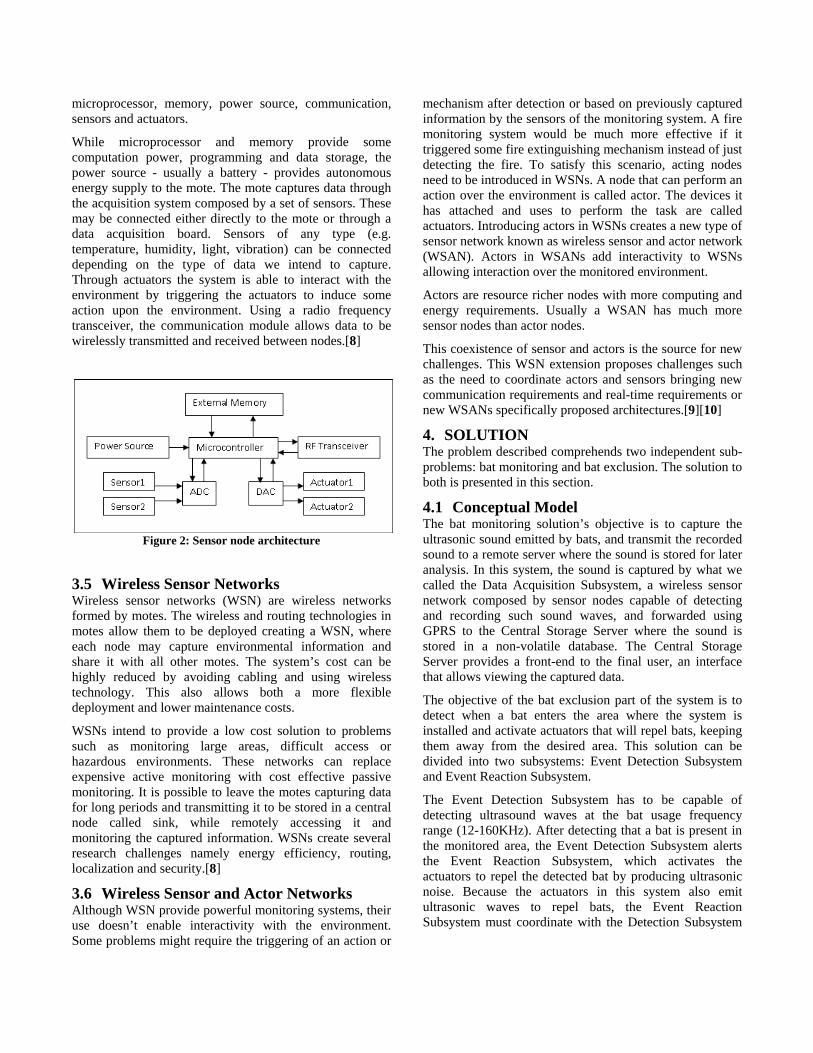
microprocessor, memory, power source, communication, sensors and actuators.
While microprocessor and memory provide some computation power, programming and data storage, the power source - usually a battery - provides autonomous energy supply to the mote. The mote captures data through the acquisition system composed by a set of sensors. These may be connected either directly to the mote or through a data acquisition board. Sensors of any type (e.g. temperature, humidity, light, vibration) can be connected depending on the type of data we intend to capture. Through actuators the system is able to interact with the environment by triggering the actuators to induce some action upon the environment. Using a radio frequency transceiver, the communication module allows data to be wirelessly transmitted and received between nodes.[8]
Figure 2: Sensor node architecture
3.5 Wireless Sensor Networks Wireless sensor networks (WSN) are wireless networks formed by motes. The wireless and routing technologies in motes allow them to be deployed creating a WSN, where each node may capture environmental information and share it with all other motes. The system’s cost can be highly reduced by avoiding cabling and using wireless technology. This also allows both a more flexible deployment and lower maintenance costs.
WSNs intend to provide a low cost solution to problems such as monitoring large areas, difficult access or hazardous environments. These networks can replace expensive active monitoring with cost effective passive monitoring. It is possible to leave the motes capturing data for long periods and transmitting it to be stored in a central node called sink, while remotely accessing it and monitoring the captured information. WSNs create several research challenges namely energy efficiency, routing, localization and security.[8]
3.6 Wireless Sensor and Actor Networks Although WSN provide powerful monitoring systems, their use doesn’t enable interactivity with the environment. Some problems might require the triggering of an action or
mechanism after detection or based on previously captured information by the sensors of the monitoring system. A fire monitoring system would be much more effective if it triggered some fire extinguishing mechanism instead of just detecting the fire. To satisfy this scenario, acting nodes need to be introduced in WSNs. A node that can perform an action over the environment is called actor. The devices it has attached and uses to perform the task are called actuators. Introducing actors in WSNs creates a new type of sensor network known as wireless sensor and actor network (WSAN). Actors in WSANs add interactivity to WSNs allowing interaction over the monitored environment.
Actors are resource richer nodes with more computing and energy requirements. Usually a WSAN has much more sensor nodes than actor nodes.
This coexistence of sensor and actors is the source for new challenges. This WSN extension proposes challenges such as the need to coordinate actors and sensors bringing new communication requirements and real-time requirements or new WSANs specifically proposed architectures.[9][10]
4. SOLUTION The problem described comprehends two independent sub-problems: bat monitoring and bat exclusion. The solution to both is presented in this section.
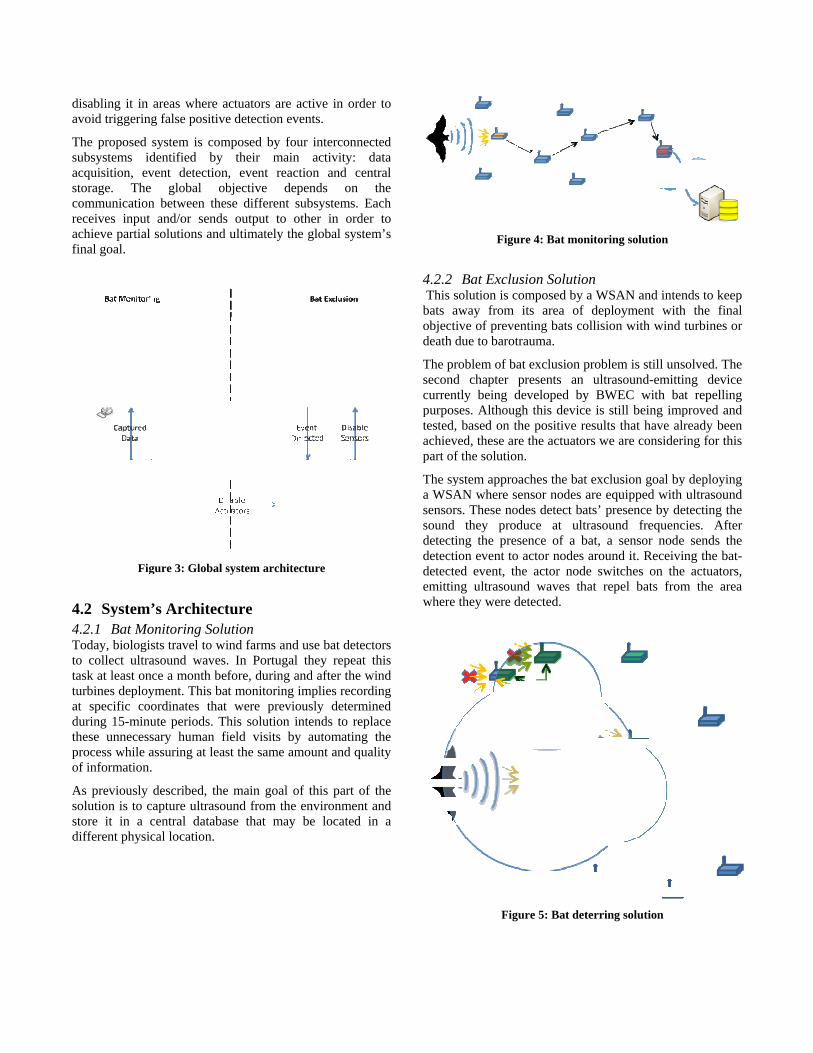
4.1 Conceptual Model The bat monitoring solution’s objective is to capture the ultrasonic sound emitted by bats, and transmit the recorded sound to a remote server where the sound is stored for later analysis. In this system, the sound is captured by what we called the Data Acquisition Subsystem, a wireless sensor network composed by sensor nodes capable of detecting and recording such sound waves, and forwarded using GPRS to the Central Storage Server where the sound is stored in a non-volatile database. The Central Storage Server provides a front-end to the final user, an interface that allows viewing the captured data.
The objective of the bat exclusion part of the system is to detect when a bat enters the area where the system is installed and activate actuators that will repel bats, keeping them away from the desired area. This solution can be divided into two subsystems: Event Detection Subsystem and Event Reaction Subsystem.
The Event Detection Subsystem has to be capable of detecting ultrasound waves at the bat usage frequency range (12-160KHz). After detecting that a bat is present in the monitored area, the Event Detection Subsystem alerts the Event Reaction Subsystem, which activates the actuators to repel the detected bat by producing ultrasonic noise. Because the actuators in this system also emit ultrasonic waves to repel bats, the Event Reaction Subsystem must coordinate with the Detection Subsystem
da
Tsascraf
44Ttotatuadthpo
Assd
disabling it in avoid triggering
The proposed subsystems idacquisition, evstorage. The communicationreceives input achieve partial final goal.
Fig
4.2 System’4.2.1 Bat MoToday, biologiso collect ultraask at least oncurbines deploy
at specific cooduring 15-minuhese unnecess
process while aof information.
As previously solution is to cstore it in a cdifferent physic
areas where ag false positive
system is comdentified by vent detection
global obn between thes
and/or sends solutions and
gure 3: Global s
’s Architectonitoring Solusts travel to wiasound waves.ce a month bef
yment. This batordinates that ute periods. Thsary human fiassuring at leas
described, theapture ultrasoucentral databacal location.
actuators are ace detection eve
mposed by fourtheir main
, event reactibjective depese different su
output to othultimately the
system architec
ture ution ind farms and u. In Portugal tfore, during ant monitoring imwere previou
his solution inield visits by st the same am
main goal of und from the ese that may b
ctive in order ents.
r interconnecteactivity: da
ion and centrends on thubsystems. Eacher in order global system
ture
use bat detectothey repeat th
nd after the winmplies recordinusly determine
ntends to replacautomating th
ount and quali
f this part of thenvironment anbe located in
to
ed ata ral he ch to
m’s
ors his nd ng ed ce he ity
he nd
a
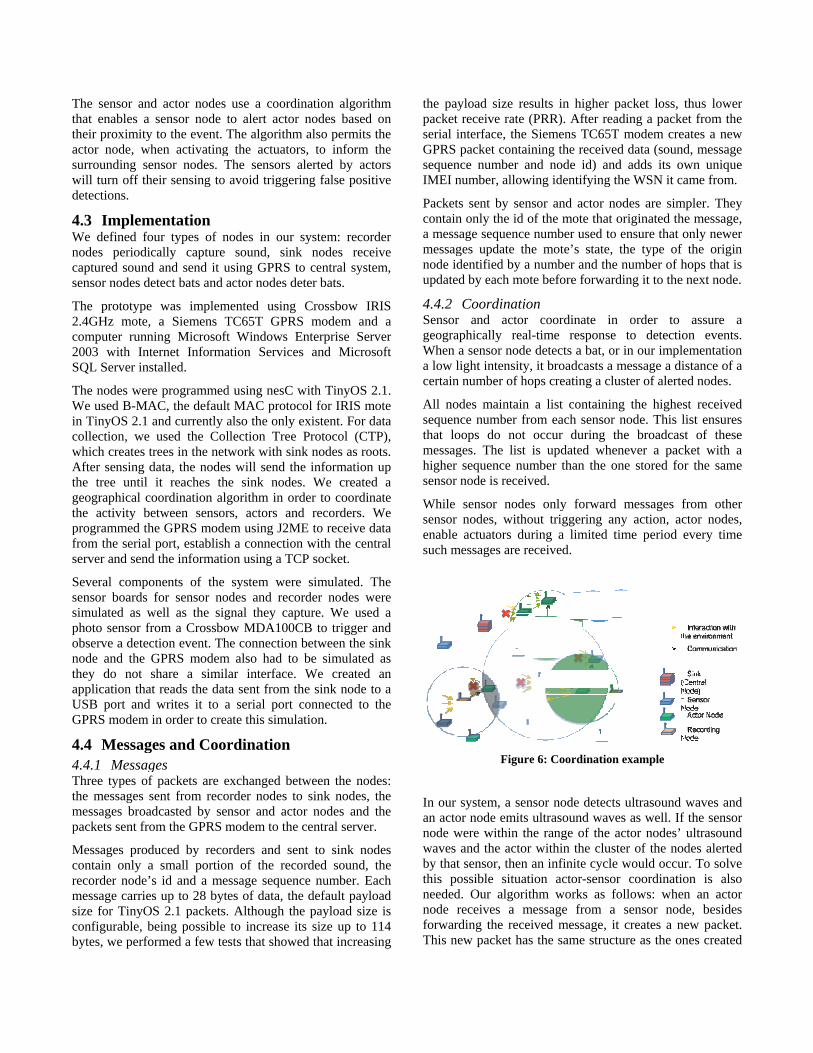
4.2.2 This sbats aobjectideath d
The prsecondcurrenpurpostested,achievpart of
The sya WSAsensorsound detectidetectidetecteemittinwhere
Figure
Bat Exclusiosolution is comaway from itsive of preventidue to barotrau
roblem of bat ed chapter prently being devses. Although , based on the ved, these are thf the solution.
ystem approachAN where sensrs. These nodes
they producing the presenion event to aced event, the ng ultrasound they were dete
Figure
4: Bat monitor
on Solution mposed by a Ws area of deping bats collisiuma.
exclusion problesents an ultrveloped by BWthis device is positive resulthe actuators w
hes the bat excsor nodes are es detect bats’ pce at ultrasonce of a bat, actor nodes arouactor node swwaves that re
ected.
e 5: Bat deterrin
ring solution
SAN and intenployment withion with wind
lem is still unsrasound-emittiWEC with batstill being impts that have alr
we are consideri
clusion goal byequipped with presence by deund frequenca sensor node und it. Receivinwitches on theepel bats from
ng solution
nds to keep h the final turbines or
solved. The ng device t repelling proved and ready been ing for this
y deploying ultrasound
etecting the cies. After sends the ng the bat-
e actuators, m the area
Tththaswd
4Wncs
T2c2S
TWincwAthgthpfs
SssponthaUG
44Tthmp
Mcrmscb
The sensor andhat enables a heir proximity
actor node, whsurrounding sewill turn off thdetections.
4.3 ImplemWe defined fonodes periodiccaptured soundsensor nodes de
The prototype 2.4GHz mote, computer runn2003 with IntSQL Server ins
The nodes werWe used B-MAn TinyOS 2.1
collection, we which creates tAfter sensing dhe tree until
geographical cohe activity be
programmed thfrom the serial server and send
Several composensor boards simulated as wphoto sensor frobserve a detecnode and the Ghey do not s
application thatUSB port and GPRS modem i
4.4 Messag4.4.1 MessagThree types ofhe messages s
messages broadpackets sent fro
Messages prodcontain only arecorder node’message carriessize for TinyOconfigurable, bbytes, we perfo
d actor nodes sensor node t
y to the event. Then activatingensor nodes. Their sensing to
mentation our types of ncally capture d and send it uetect bats and a
was implema Siemens T
ning Microsoftternet Informastalled.
e programmedAC, the defaultand currently aused the Col
trees in the netwdata, the nodesit reaches th
oordination algetween sensorhe GPRS mode
port, establishd the informatio
onents of the for sensor no
well as the sigrom a Crossboction event. ThGPRS modemshare a similt reads the datwrites it to a
in order to crea
es and Coorges f packets are esent from recodcasted by senom the GPRS m
duced by recoa small portions id and a mes up to 28 byteS 2.1 packets.
being possible ormed a few te
use a coordinto alert actor The algorithm the actuators
The sensors alavoid triggerin
nodes in our ssound, sink
using GPRS toactor nodes det
mented using TC65T GPRS t Windows Enation Services
d using nesC wt MAC protocoalso the only ellection Tree Pwork with sinks will send thee sink nodes.gorithm in ordrs, actors andem using J2MEh a connection on using a TCP
system were des and recor
gnal they captuow MDA100CBhe connection b
m also had to bar interface. ta sent from tha serial port cate this simulat
rdination
exchanged betworder nodes to nsor and actormodem to the c
rders and senn of the recorssage sequences of data, the Although theto increase itssts that showed
nation algorithnodes based oalso permits th
s, to inform thlerted by actong false positiv
system: recordnodes receiv
o central systemter bats.
Crossbow IRImodem and
nterprise Servand Microso
with TinyOS 2.ol for IRIS moxistent. For daProtocol (CTPk nodes as roote information u. We created
der to coordinad recorders. WE to receive dawith the centr
P socket.
simulated. Thrder nodes weure. We used B to trigger anbetween the sinbe simulated We created ae sink node toonnected to thtion.
ween the nodesink nodes, th
r nodes and thcentral server.
nt to sink nodrded sound, th
ce number. Eacdefault payloa
e payload size s size up to 11d that increasin
hm on he he
ors ve
der ve m,
IS a
ver oft
.1. ote ata P), ts. up
a ate We ata ral
he ere
a nd nk as an
o a he
es: he he
es he ch ad is
14 ng
the papacketserial GPRS sequenIMEI n
Packetcontaina messmessagnode iupdate
4.4.2SensorgeograWhen a low lcertain
All nosequenthat lomessaghighersensor
While sensorenablesuch m
In our an actonode wwaves by thatthis pneedednode forwarThis n
ayload size rest receive rate (interface, the Spacket contain
nce number annumber, allowi
ts sent by sensn only the id osage sequence ges update thedentified by a
ed by each mot
Coordinatior and actor aphically real-a sensor node light intensity,
n number of ho
odes maintain nce number frooops do not ges. The list ir sequence numr node is receiv
sensor nodesr nodes, withoe actuators durmessages are re
Figure
system, a senor node emits were within th
and the actor t sensor, then aossible situatid. Our algorithreceives a mrding the receinew packet has
sults in higher(PRR). After reSiemens TC65ning the receivnd node id) aing identifying
sor and actor of the mote thanumber used te mote’s statenumber and th
te before forwa
on coordinate i
-time responsdetects a bat, it broadcasts a
ops creating a c
a list containiom each sensooccur during is updated whmber than the ved.
s only forwarout triggering ring a limited eceived.
e 6: Coordinatio
nsor node detecultrasound wav
he range of thewithin the clu
an infinite cycion actor-senshm works as
message from ived message, s the same stru
r packet loss, teading a packe5T modem creved data (soundnd adds its ow
g the WSN it ca
nodes are simat originated thto ensure that oe, the type of he number of harding it to the
in order to se to detectioor in our implea message a dicluster of alerte
ing the highesor node. This l
the broadcashenever a packone stored for
rd messages fany action, actime period e
on example
cts ultrasound ves as well. If
e actor nodes’ uster of the nodle would occur
sor coordinatiofollows: whena sensor nodit creates a ne
ucture as the on
thus lower et from the ates a new d, message wn unique ame from.
mpler. They e message, only newer the origin
hops that is next node.
assure a on events. ementation istance of a ed nodes.
st received list ensures t of these ket with a r the same
from other ctor nodes, every time
waves and f the sensor ultrasound des alerted r. To solve on is also n an actor
de, besides ew packet. nes created

by sensors, with a different value for the type of node. The packet is broadcasted within a cluster also determined by the number of hops, where sensor nodes receiving the message stop sensing the environment during the same time period an actor node enables the actuators.
Using the described algorithm, we create both sensor-actor and actor-sensor geographical coordination.
Recorders, similarly to sensors capture ultrasound waves. If a recorder is capturing sound waves in the same area an actor node is emitting ultrasound, the recorded sound would be full of noise produced by the actuators. Coordination between recorders and actors is also necessary. The decision on whether it is the recorder node that should stop capturing or the actor node that should stop emitting is certainly debatable. However, we decided that a recorder node should proceed capturing and the actor node should disable its actuators. This decision was based on the assumption that other sensor and actor nodes may exist and execute the deterring task while the recorders always need to capture sound at the same exact location and strict schedule maintaining data coherence.
Before starting the capture period, a recorder node broadcasts a message with the same structure used in other coordinations and containing the same data. A sensor and recorder node receiving the packet will forward it, when still within the cluster, only updating its internal list and incrementing the hop count. An actor node besides forwarding the packet will disable the actuators during a predetermined period of time (corresponding to time capturing time interval). During this period it will not enable its actuators if a message alerting a bat presence is received.
5. EVALUATION AND RESULTS Several tests were conducted on the fully developed prototype in order to evaluate different relevant aspects. First, we intended to test the maximum wireless transmission speed. The data transmission rate is crucial to understand how much time it takes for the information to be available to the system’s user since it was captured. The second group of tests evaluated the performance of the coordination algorithm in order to understand if actor nodes respond to detection events in an acceptable time. Finally, a third group of tests evaluates the battery life of each node.
5.1 Wireless Transmission Speed Using the implemented prototype we performed a series of tests where the variables packet size and transmission rate were successively changed in order to evaluate the maximum transmission rate. For each of the observed values we calculated the packet receive rate (PRR) assuring that the transmission speed wouldn’t compromise the correct reception of data.
Three Crossbow IRIS 2.4GHz motes were used in this test, installed at a distance at a distance of 4 meters from each other.
We observed a direct relation between both the packet size and the transmission rate with the PRR. Our results showed that the increase of the size of the payload, thus the size of the packet, results in a decrease of the packet receive rate. Similarly, we experienced a decrease of the PRR when increasing the transmission rate.
We registered a maximum transmission rate of 112Bps.
Existing bat detectors may have several different specifications. The Petterson DX240 captures sound at 240KHz and 8bit while the Petterson DX1000 captures ultrasound at 768KHz and 16bit. A 15 minutes capture will generate 210MB and 1,5GB of data respectively. With a transmission speed of 112Bps the system would take 5 months to transmit 1,5GB or 22 days to transmit 210MB. Such values show that the system is unsuitable for transferring such amounts of data, revealing a clear limit regarding the periodic capture duration.
Further research showed that this low transmission is caused by the lack of congestion control mechanisms in the CTP protocol.
5.2 Coordination Algorithm In order to evaluate the coordination algorithm we used a wireless sensor networks simulator developed by the University of California, Los Angeles (UCLA) called Avrora. This simulator allowed us to simulate the deployment of the system in a large WSN, measuring the reaction of the system to the detected events and evaluating the correct responsiveness of the algorithm. Several topologies were tested being composed of several sensor and actor nodes. A detection event was induced by introducing data values into one of the sensor nodes. The sensor node reacted by broadcasting an alert message to its surrounding nodes. We measured the time elapsed between the instant of the induced event and the reaction of each actor node. The system’s time for reaction naturally increases with the number of hops.
The maximum speed ever registered for a flying bat is 97km/h (Tadarida Brasiliensis). Due to Avrora’s limitations our simulation was done using mica2. These motes have a wireless transmission range of 150 meters.
We registered a reaction time of 0,1 seconds. If a sensor node can detect a bat 30 meters away, the bat is detected at least 180 meters away from the actor node. At 97km/h the bat would take 6,68 seconds to reach the actor node, meaning the system could experience a 6,58seconds delay and still correctly respond to the event.

5.3 Energy Consumption Energy is a critical resource in the WSN domain. Each node is powered by its own batteries giving it autonomy but also limiting its correct functioning by depending on the battery life.
The power usage of the nodes dictates the node’s battery lifetime. In order to assess the node’s lifetime regarding battery durability, we conducted energy consumption evaluation tests. This was evaluated by measuring the cycles of nodes in simulations conducted using Avrora. The values obtained were then used to calculate the duty cycle which was inserted into an Excel worksheet provided by Crossbow in order to evaluate the node’s lifetime.
Due to several limitations of Avrora in simulations making use of Low Power Listening, we were only able to evaluate a small and limited number of scenarios. For each node, we measured the duty cycle during active and inactive states and finally combined both results to obtain the node’s estimated lifetime.
Based on this test, we calculated the sensor and actor node’s lifetime to be about 3 months, while a forward node has a lifetime of 7 months. The recorder has an estimated lifetime of 80 months and the sink node can work up to 90 months.
The limitations imposed by Avrora in the this test made it incomplete and inaccurate and the results may only be used for very high level estimation purposes.
6. CONCLUSIONS This paper presents a novel WSAN application in the domain of environmental monitoring and protection. The developed system aims at solving the known bat killing and wind energy problem and helping scientists study bats’ behavior. This project was motivated by the fact that the role bats’ represent in the ecosystems’ equilibrium is irreplaceable and on the responsibility we have to preserve every existing species.
Starting with a literature review we covered wireless sensor networks, wireless sensor and actor networks, bat monitoring and deterring. We built a conceptual model and designed the architecture for the bat monitoring and deterring system as well as the composing subsystems. The bat monitoring system and the bat deterring systems were modeled independently and interconnected afterwards. Wireless sensor networks, wireless sensor and actor networks, GPRS communication and a central server were combined to model a single system where characteristics of each technology contributed to achieve the same purpose. We have then implemented our monitoring and deterring models using Crossbow IRIS 2.4GHz wireless modules, a Crossbow MDA100CB sensor board, a Siemens TC65T GPRS modem and a server running Microsoft Windows 2003 and Microsoft SQL Server 2005. We used TinyOS2.1
and nesC to program the motes, J2ME CLDC 1.1 HI to program the GPRS modem and C#.NET to develop the web and console applications running in the central server. A preliminary evaluation of the model was performed.
The conducted evaluation showed that the monitoring system could perform autonomously and the captured information monitored remotely. However, a limitation was found regarding the wireless transmission speed of the monitoring solution. The Collection Tree Protocol used in the solution wasn’t able to support such high amounts of data as those that are captured during a monitoring period. These low performance results were mainly due to the lack of existing flow/congestion control mechanisms in the protocol used.
The evaluation of the deterrent system proved that the proposed solution could respond in real-time to the detection events. The coordination algorithm could effectively geographically coordinate sensors and actors by broadcasting alert messages thus locally reacting to the detected events.
The work developed in this paper highlighted the importance on the use of technology to the development of novel environmental systems. These innovative technologies may be used to build more effective systems and finding the solution to previously unsolvable environmental problems.
6.1 Future Work By developing the research and implementing this project we found several opportunities for further development. The development of flow/congestion control mechanisms in the Collection Tree Protocol is essential as it would allow faster transmission speeds. Specific to this project all the hardware sensor boards need to be developed according to the project’s specification and the system could be extended to allow reconfiguration through the dissemination of values from sink nodes to the network. Also, to allow future updates of the software, nodes should also be prepared to allow Over the Air Programming which allows every node to be remotely updated.
7. REFERENCES
[1] World Wind Energy Association, "Wind Turbines Generate More Than 1% Of The Global Electricity," World Wind Energy Association, Bonn, Report 2008.
[2] Erin F. Baerwald, Genevieve H. D'Amours, Brandon J. Klug, and Robert M.R. Barclay, "Barotrauma is a significant cause of bat fatalities at wind turbines," vol. 18, no. 16, 2008.
[3] Thomas H. Kunz et al., "Ecological impacts of wind energy development on bats: questions, research needs, and hypotheses," Frontiers in Ecology and the Environment, vol. 5, no. 6, pp. 315-324, August 2007.

[4] Bat Conservation Internacional. (2007, December) Bat Conservation Internacional. [Online]. http://www.batcon.org/home/index.asp?idPage=55&idSubPage=32
[5] Bat Conservation International. (2008, January) All About Bats. [Online]. http://www.batcon.org/home/index.asp?idPage=121
[6] G. R. Spanjer, "Responses of the big brown bat, Eptesicus fuscus, to an acoustic deterrent device in a lab setting. A report submitted to the Bats and Wind Energy Cooperative and the Maryland Department of Natural Resources.," Bats and Wind Energy Cooperative and the Maryland Department of Natural Resources, Austin, Technical Report 2006.
[7] Jason W. Horn, Edward B. Arnett, Mark Jensen, and Thomas H. Kunz, "Testing the effectiveness of an experimental acoustic bat deterrent at the Maple Ridge wind farm," The Bats and Wind Energy Cooperative and Bat Conservation International, Austin, Technical Report 2008.
[8] Paolo Baronti et al., "Wireless Sensor Networks: a Survey on the State of the Art and the 802.15.4 and ZigBee Standards," Computer Communications, vol. 30, no. 7, pp. 1655-1695, May 2007.
[9] Ian F. Akyildiz and Ismail H. Kasimoglu, "Wireless sensor and actor networks: research challenges," Ad Hoc Networks Journal, vol. 2, no. 4, pp. 351-367, October 2004.
[10] Georgia Tech Networks and Mobile Computing Research Group. (2008, January) GNAN Extending the Frontiers of Networking Research. [Online]. http://www.ece.gatech.edu/research/GNAN/work/wsan/wsan.html