-
© OMRON Corporation
산업용 로봇 안전 방호대책어플리케이션 소개
한국 오므론 제어기기
-
로봇안전 안전 규격 핵심요약
1
-
로봇의 안전 규격의 현황
지역 Risk assessment RobotsRobot systems and integration
Collaborative robots
한국 KS B ISO 12100 KS B ISO 10218-1 KS B ISO 10218-2KS B ISO
TS
15066
유럽 EN ISO 12100 EN ISO 10218-1 EN ISO 10218-2 ISO TS 15066
미국ANSI/ISO 12100,
ANSI B11.0ANSI/RIA R15.06
(1st Half)ANSI/RIA R15.06
(2nd Half)RIA TR R15.606
캐나다CSA Z432, CAN/
CSA-Z1002CAN/CSA-Z434
(1st Half)CAN/CSA-Z434
(2nd Half)
일본 JIS B 9700 JIS B 8433-1 JIS B 8433-2 JIS TS B 0033
중국 GB/T 15706-2012 GB 11291.1-2011 GB 11291.2-2013 GB
11291.2:2013
• ISO 10218-1:2011 산업용 로봇의 안전에 관한 요구사항 - 제1부: 로봇Robots and
robotic devices - Safety requirements for industrial robots - Part
1: Robots산업용 로봇 자체의 본질 안전 설계 및 보호 방안, 사용상의 정보에 대한 안전 요구 사항 등에 대한
규정.
• ISO 10218-2:2011 산업용 로봇의 안전에 관한 요구사항-제2부:로봇 시스템 및 통합 Robots
and robotic devices - Safety requirements for industrial robots -
Part 2: Robot systems and integration산업용 로봇 생산 라인에서 주변 기기와 결합되어 설치
될 때 로봇 시스템으로 안전 요구 사항 등에 대한 규정.
• ISO TS 15066:2016 로봇 및 로봇 장치 - 협동로봇 -제2부:로봇 시스템및 통합 Robots and
robotic devices - Collaborative robots협동 로봇을 위한 확인된 운전 기능에 대한 추가적인
안내를 제공
▣ 로봇 안전의 국제 규격 현황
▣ 각 나라별 규격 현황과 국내법
* 기술 시방서 (TS: Technical specification)는 표준 합의를 아직 충분히 얻은 것은
아니지만, 향후 제정의 가능성이 있다고 판단되어 공표되는 것. 2
-
ISO10218-1 5장 규격개요
5.4 Safety-related control system
performance(hardware/software)
5.4.1 General5.4.2 Performance requirement
– ISO 13849-1:2006 Cat.3, PLd 요건5.4.3 Other control system
performance criteria
– 리스크 판단의 결과에 따라서는 카테고리3, PLd 이외(카테고리 2, PLc또는 Ple)를 선택할 수 도 있음.
근거자료 필요
5.5 Robot stopping functions 5.5.1 General5.5.2 Emergency stop
function
– 5.4에 따라 카테고리3, PLd– 모든 위험원의 중지– 로봇의 동력을 제거
5.5.3 Protective stop– 외부 기기와의 접속– 5.4에 따라 카테고리3, PLd
5.6 Reduced speed control • 250mm/sec 이하의 공구중심점(TCP)• 속도 제한은
250mm/sec 이하• TCP를 통한 속도 조절을 위한 오프셋 기능
5.7 Operational modes5.7.1 Selection
– 키 스위치 등으로 보안 기능이 필요. (조작자를 제한)
– 모드 선택을 외부로 표시– 출력은 5.4에 따라 카테고리3, PLd
5.7.2 Automatic– 자동모드는 수동모드로 동작 되지 않음– 안전 인터락 기능이 필요.– 정지가 검출되면
자동운전을 중단하고 정지.– 자동 모드에서 다른 모드로 전환할 때도 정지
5.8 Pendant controls– 3 포지션의 이네이블 기기(가동허가장치)– 좌우에 있는 경우의 규정– 2대
이상의 이네이블 장치 (2인 이상에서의 작업)
에서의 규정.– 이네이블 출력신호가 있는 경우는 5.4에 따라
카테고리3, PLd– 펜던트에 대한 비상정지 기능이 필요.– 티칭 모드의 실행은 펜스 밖에서 확인이 필요.
3
-
ISO10218-2 5장 규격개요
5.2 Safety-related control system
performance(hardware/software)
5.2.1 General5.2.2 Performance requirement
– ISO 13849-1:2006 Cat.3, PLd 요건5.2.3 Other control system
performance criteria
– 리스크 판단의 결과에 따라서카테고리 3, PLd 이외(카테고리 2, PLc또는 Ple)를선택할 수 있음.
근거자료 필요
5.3 Design and installation5.3.1 Environmental conditions5.3.2
Location of controls
– 자동 운전시 사용되는 제어기 펜스외부 설치5.3.3 Actuating controls5.3.4 Power
requirements5.3.5 Equipotential bonding/grounding requirements5.3.6
Isolating sources of energy5.3.7 Control of stored energy5.3.8
Robot stopping functions 5.3.8.1 General5.3.8.2 Emergency stop
function
– 5.4에 따라 카테고리3, PLd– 모든 위험원의 중지– 로봇의 동력을 제거
5.3.8.3 Protective stop– 외부 기기와의 접속– 5.4에 따라 카테고리3, PLd
5.4 Limiting robot motion– 위험원으로부터 작업자를 보호할 영역을 지정하
고 안전장치를 설치5.5 Layout5.6 Robot system operational mode
application5.6.2 Selection
– 키 스위치 등으로 보안 기능이 필요. (조작자를 제한)
– 모드 선택을 외부로 표시– 출력은 5.4에 따라 카테고리3, PLd
5.6.2 Automatic– 자동모드는 수동모드로 동작 되지 않음– 안전 인터락 기능이 필요.– 예기치 않은 기동
방지
5.6.3 Manual mode– 감속 제어 - TCP의 속도가 250 mm/s이하– 펜던트 사용 필요
5.7 Pendants– 자동모드, 수동모드
4
-
ISO 10218-1 관련 국제 규격의 구조
5
-
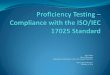
Performance Level의 정의(ISO 13849-1:2015)
PLr
a
b
c
d
e
S:상해의 중대도
(Severity of Injury)
·S1:경상
·S2:중증(후유증, 사망 등)
F:위험에 처해지는 빈도
(Frequency and/or Exposure to Hazard)
·F1:보기 드물게 발생하거나 단시간
·F2:빈번히 발생하거나 장시간
P:위험을 피하거나 손해를 제한할 가능성
(Possibility of Avoiding Hazard or Limiting Harm)
·P1:특정의 조건하에서 가능
·P2:불가능
L
H
ISO13849-1:2015
S1
S2
F1
F2
P1
P2
P1
P2
P1
P2
P1
P2F1
F2
6
-
ISO 13849-1:2015에 의한 PL평가
LI O
안전 검출 기능
비 안전 관련부
보통의제어신호
안전 확인신호
판단 기능 동력 제어 기능
안전 관련부(SRP/CS)
PLC등
도어 스위치, 라이트 커튼 등
안전 컨트롤러 등
제어 시스템
마그네트 컨택터 등
블럭 다이어그램의 전개
SRP/CS(Safety-Related Parts of Control System)
Category MTTFd
DCavg CCF
안전기능별 ILO로 구분, 도식화 4개 요소확인 및 계산
안전기능별PL의 평가
7
-
ISO 13849-1:2015에 의한 카테고리 B – 이론
• 사용 환경에 견딜 재료의 선택.
• 기타 관련 외적 영향, 예를 들면, 기계 진동, EMC제어 전원 회로의 중단및 변동.
– 카테고리 B는 Dcavg값이 없음(DCavg=0%). 또한, 각 채널의 MTTFd값이 낮은 경우가있으며,
CCF값을 고려 하지 않는다.
– 카테고리 B에서 달성 가능한 최대 PL은 PL=b다.
– 고장 발생으로 안전 기능이 손상된다.
I L O
Input signal Output signal
카테고리 B에 적용되는 구조
I:입력 기기 예:센서
L:논리 연산 장치
O:출력 기기 예:콘텍터
안전 기능의 목적에 적합
8
-
ISO 13849-1:2015에 의한 카테고리 B – 회로 예제
• 요구 사항– 사용 부품은 그 기계의 예견되는 사용 환경에 충분히 견딜 수 있는 것
• 기계적 스트레스 예: 동작 횟수
• 화학적 영향 예 : 약품에 의한 부식
• 전자적 영향 예: 노이즈 등.
– 기본적인 안전 원칙의 사용
• 방안– 용도에 맞는 규격에 적합한 부품을 선택한다.
– 예) 단선 시 OFF 시키기 위해 NC접점을 선택
입력
출력
제어회로
K1
KM1
릴레이
컨텍터
M
비상 정지 스위치
RESET
NC접점
K1
예기치 않은기동 방지
자기 유지FA용도에 적합한 부품
9
-
ISO 13849-1:2015에 의한 카테고리 1 – 이론
I L O
Input signal Output signal
카테고리 1에 적용되는 구조
카테고리 B의 요구 사항 외에 충분히 검토된 부품과 충분히 검토된 안전 원칙을 이용해 설계 및 조립한다.(ISO
13849-2를 참조)
충분히 검토된 부품은 다음 중 하나다.
a)과거 유사한 용도에 폭넓게 사용되고, 실적이 있는 것.
b)안전성 관련 용도로 사용에 적합하고 또 신뢰성 검증되어 있는 것.
※ 복잡한 전자 부품으로 구성된 것(예를 들면 일반 PLC)은 실적이 있다고 볼 수 없다.
각각의 채널 MTTFd는 높음.
카테고리 1에서 달성 가능한 최대 PL은 PL=c이다.
※카테고리 1에는 카테고리 B와 같이 Dcavg값이 없음.(DCavg=0%). 또한 CCF의 고려도 관계
없다.
고장 발생으로 안전 기능이 손상되지만 MTTFd는 카테고리 B보다 높아 안전 기능이 훼손될 가능성은 낮음.
"충분히 검토된 부품"과 "고장 배제“를 명확하게 구별할 필요가 있다.
I:입력 기기 예:센서
L:논리 연산 장치
O:출력 기기 예: 컨텍터
*카테고리 1의 MTTFd는 카테고리 B보다 높기 때문에 안전 기능 상실할 가능성은 낮지만, 고장시 안전 기능의
상실을 유발시킬 수 있다.
충분히 검증된 안전 원칙
10
-
ISO 13849-1:2015에 의한 카테고리 1 – 회로 예제
11
• 요구 사항– 카테고리 B의 요구 사항
– 충분히 검토된 부품&충분히 검토된 안전 원칙의 사용
• 방안– 사용 부품은 제3자 기관의 인증품
– 직접 개로 동작 기구 등 충분히 검토된 안전 원칙의 사용
K1
KM1
KM1
K1세이프티 릴레이
컨텍터
M
비상 정지 스위치
RESET
직접 개로 동작 기구(IEC60947-5-1 Annex K인증품)
강제 가이드 접점 기구(EN50205인증품)
미러 컨텍터(IEC60947-4-1인증품)
입력
출력
제어회로
-
ISO 13849-1:2015에 의한 카테고리 2 – 이론
I L O
Input signal Output signal
TE OTEOutput signal
m
m:모니터링
TE:점검 기기
OTE:점검 결과 출력
*카테고리 2는 고장이 일어나면, 점검 사이에 안전 기능의 상실을 유발시킬 수 있다.
카테고리 2에 적용되는 구조
카테고리 B의 요구 사항에 충분히 검토된 안전 원칙을 이용해 설계 및 조립한다.
안전 및 제어관련 기기는 안전 기능이 기계의 제어 시스템에 따라 적절한 간격으로 체크하며, 다음과 같이
실시한다.
- 기계의 기동시
- 위험이 발생하기 전(예를 들어 새로운 사이클의 시작이나 위험도 평가에 따라 점검이 필요한 상황)
체크는 자동으로 시작되며, 안전 기능 검사는 다음 중 하나이다.
- 고장이 검출되지 않을 경우 운전을 허용한다.
- 고장이 검출된 경우 적절한 제어 동작을 하는 출력을 내보낸다.
가능한 경우 이 출력은 안전 상태를 만들어야 하며, 이 안전한 상태는 고장이 제거될 때까지 유지되어야 한다. 안전
상태로 만들 수 없는 경우 경고 출력을 내보낸다.
체크 자체로 인해 위험이 발생해서는 안 된다(예를 들면 응답 시간의 증가). 점검을 위한 기기는 안전 관련부와
일체형 또는분리형 모두 가능하다.
카테고리 2로 달성 가능한 최대 PL은 PL=d이지만, 점검율은 수요율보다 100배 이상 되어야 하며, L의
MTTFd값은 TE의MTTFd값보다 두배 이상이어야 한다. 만약, SLC 처럼 I-L-O를 분리 할 수 없는 경우,
TE, OTE의 MTTFd값은 I-L-O의 반보다커야 한다.
점검 사이의 고장 안전 기능이 손상 될 수 있다.
MTTFd, DCavg의 계산은 I, L, O만 계산 하며, TE및 OTE는 계산할 필요 없음. 위험 측 고장
검출12
-
ISO 13849-1:2015에 의한 카테고리 2 – 회로 예제
• 요구 사항– 카테고리 B의 요구 사항
– 충분히 검토된 안전 원칙의 사용
– 안전 기능의 적당한 간격으로 체크
• 방안– 프루프 체크, 백 체크
프루프 체크
안전 시스템의 고장을 검출하기 위한 주기적인 테스트
입력
출력
제어회로1
12
2
3
4
56
7
8
9
10
11
출력
K1
M
제어부 백 체크
프루프체크
점검 출력
K2
투광부 수광부
안전 출력
13
-
ISO 13849-1:2015에 의한 카테고리 3 – 이론
I1 L1 O1Input signal Output signal
m
I2 L2 O2Input signal Output signal
m
C
m:모니터링
C:크로스 모니터링
*카테고리 3은 검출되지 않는 고장의 누적에 따른 안전 기능이 없음.
*이 블럭 다이어그램에 규정된 아키텍처의 이중화는 물리적 의미뿐만아니라, 단일 고장 내성이 확인된 내부 논리도
의미한다.
카테고리 3에 적용되는 구조
카테고리 B의 요구 사항에 충분히 검토된 안전 원칙을 이용해 설계 및 조립한다.
안전 및 제어관련 기기는 단일 고장이 생겨도 안전 기능이 상실되지 않도록 설계하는 것.
단일 사고는 안전 기능의 다음의 동작 요구 또는 그전에 검출하는 것.
카테고리 3에서 달성 가능한 최대 PL은 PL=e이다.
단일 고장 시 안전 기능은 유지 된다.
그러나 일부의 단일 고장을 검출할 수 없기 때문에, 고장의 누적에 따른 안전 기능이 상실된다.
이중화에 의한 리커버리
+ 위험 측 고장 검출
※ 참조
ISO 13849-1: 2015 內 6.2.1 에서는 반드시 물리적인 2중화가 되지 않더라도
동일의 안전 기준을 수행하면 안전 카테고리 3, 4를 만족 시킬 수 있다고 명시
14
-
ISO 13849-1:2015에 의한 카테고리 3 – 회로예제
• 요구 사항– 카테고리 B의 요구 사항
– 충분히 검토된 안전 원칙의 사용
– 단일 고장에서 안전 기능을 잃지 않는 것
• 방안– 회로의 이중화
– 백 체크로 기계 고장 검출이중화
하나의 구성 부품이 고장 났을 때다른 구성 부품이 그 기능을 과연안전 기능을 유지한다.
입력
출력
제어회로
입력
출력
제어회로
1
1
2
2
1 2
E-STOP
M
K1
K2
제어시스템
입력의 이중화
출력의 이중화
RESET
백 체크
15
-
ISO 13849-1:2015에 의한 카테고리 4 – 이론
I1 L1 O1Input signal Output signal
m
I2 L2 O2Input signal Output signal
m
C
m:모니터링
C:크로스 모니터링
*이 블럭 다이어그램에 규정된 아키텍처의 이중화는 물리적 의미뿐만아니라, 단일 고장 내성이 확인된 내부 논리도
의미한다.
카테고리 4에 적용되는 구조
카테고리 B의 요구 사항에, 충분히 검토된 안전 원칙을 이용해 설계 및 조립한다.
안전 및 제어관련 기기는 단일 고장이 생겨도 안전 기능이 상실되지 않도록 설계하는 것.
그 단일 사고는 안전 기능의 다음 동작 요구 또는 그전에 검출하는 것.
이 검출이 불가능한 경우 검출할 수 없는 고장의 축적에 의해 안전 기능을 상실해서는 안 된다.
카테고리 4에서 달성 가능한 최대 PL은 PL=e이다.
단일 고장 시 안전 기능은 유지 된다.
높은 DC에 의해 고장의 축적 될 확률은 낮음.
안전 기능의 상실을 막기 위해 특정 시간 내에 고장이 검출된다.
카테고리 3과 4의 차이는 DCavg및 각 채널의 MTTFd가 High인 것보다 높은 검출 능력
16
-
ISO 13849-1:2015에 의한 카테고리 4 – 회로 예제
• 요구 사항
– 카테고리 B의 요구 사항
– 충분히 검토된 안전 원칙의 사용
– 단일 사고 혹은 고장의 축적으로 안전 기능이 손상되지 않는 것.
– 단일 사고는 안전 기능 실행 시 혹은 그 전에 검출되는 것.
• 방안
– 회로의 이중화에 의한 다양성
– 백 체크에 기계 고장 검출
다양성하나의 구성 부품이 고장 났을 때, 다른 구성 부품은 같은 고장 나지 않고안전 기능을 유지하기 위해
복수의수법을 조합하여 사용한다.
입력
출력
제어회로
입력
출력
제어회로
1
1
2
2
1 2
카테고리 3과 4의 차이는 DCavg및 각 채널의 MTTFd가High인 것 뿐이다.
E-STOP
M
K1
K2
제어 시스템
입력의 다양성
출력의 이중화
RESET
백체크
17
-
정지상태의유지를 위한래치 구조
비상 정지 스위치인 것을 표기
의도한 수동조작
- 회전한다
- 뽑는다
- Key로 해제
적색보조기구
Positive Mode 접점
배경 : 황색
Actuator : 버섯형
해제
정지
Direct Opening Mechanism인증 확인 (EN60947-5-1)
비상 정지 누름 버튼의 요구사항 (ISO13850)
설명을 위해필요한 경우 표시
18
-
무효화의 방지 기능
전용 액츄에이터 (키등) 이외의 일상에서 사용되는
키, 코인, 드라이버, 펜치, 나이프 등을 이용하여
간단한 방법으로 조작 할 수 없는 구조로 된
스위치
‥‥
전용 키
스위치 본체
인터락 스위치의 요구 사항 (ISO14119)
19
-
인터락 스위치의 요구 사항 (ISO14119)
• ISO 13849-1 Performance Level의 요구
스위치2(리미트스위치 등)
스위치1 (키방식)
스위치1 (키방식)
PL d 이상에서는사용 불가 신호1
신호2
신호1
신호2
입력1
입력2
입력1
입력2
컨트롤러
컨트롤러
PL d 이상에서사용 가능
액츄에이터를 포함한 인터락 장치의 이중화가 필요
20
-
인터락 스위치의 요구 사항 (ISO14119)
• 인터락 장치들은 다음의 한가지를 반드시 사항을 만족- 손에 닿지 않은 곳에 장착- 물리적 장애물, 차폐물-
은폐된 위치에 장착- 중, 고 수준의 코드화(10가지 이상의 코드) 트랩트 키 시스템
21
-
• 인터락 장치의 무효화 가능성 최소화 ( 7.2항 )
손이 닿는 범위 밖에 설치
덮게, 커버 등을 설치
숨겨진 장소에 설치
특수 나사 또는 리벳, 용접 등으로액츄에이터를 고정
인터락 스위치의 요구 사항 (ISO14119)
22
-
예기치 않은 기동 방지 (ISO14118)
23
-
안전 라이트 커튼 (IEC 61496-1)
Fail-safe 설계
안전 확인형 시스템
자기 진단
세이프티·라이트 커튼
ON안전이 확인되었을 때 만
OFF고장, 전원 미투입, 차광(위험)시
⇒안전을 확인할 수 없을 때
수광기
안전 용도의광전 센서
투광기
센서가 고장 났을 경우,항상 안전한 상태가 되는 설계
센서 자신이 고장 진단을 정기적으로 실시
24
-
안전 거리 산출 (ISO 13855)
기본 공식 S= K × T + C
d ≤ 40 mm100 mm ≤ S ≤ 500 mm S= (2000 mm/s × T) + 8 (d-14
mm)
S > 500 mm S= (1600 mm/s × T) + 8 (d-14 mm)
40 mm < d ≤ 70 mm S= (1600 mm/s × T) + 850 mm
싱글빔 센서 S= (1600 mm/s × T) + 1200 mm
손, 손가락 검출 시
인체 검출 시
인체 검출 시
인체 검출 시
최대 동작 영역
투광기
수광기
안전 거리(S)
S 최대 동작 영역으로부터 라이트 커튼의 검출 영역까지의 최소 안전 거리(mm)
K 신체의 접근 속도.(보행 속도)(mm/초)
T 전시스템의 정지 동작시간(초)
C 라이트 커튼의 검출 능력에 의한 추가 거리(mm)
25
-
3-Position 동작허가 장치 (ISO10218-1)
펜스 안의 위험 영역에서 작업자가 티칭 작업을 실시할때 스위치를 잡고 있을 때만 기계가 동작하여 손을 떼거나 강하게
잡으면 로봇을 정지시켜 예기치 않은 로봇의 동작을 방지 할 수 있습니다.
26
-
방호벽의 설치(ISO 13857)
기본적으로 국내법(안전 검사)에서는 1,800mm 이상을 요구하고 있으나,안전 거리에 따라 1,400mm 이상으로
할 수 있음.
27
-
실제 사용 어플리케이션 소개
28
-
기존의 회로 어플리케이션
29
Control device
일반 제어용 PLC 또는 PC
Monitoring
Motor Controller
M
Output device
Soft-Wire
•Soft-Wiring 구조(Programmable) : PLC 제어 – 프로그램만으로 안전장치 임의해제
가능
•단일회로 구성
•PLC 오류, NPN Mode(지락으로 인한 오 동작)Soft-Wiring
Hard-Wiring
안전 Category B
Input device
NPN 제어
Safety Circuit (PLC 제어) – As Is
전원 상시 통전
-
사용되는 로봇 안전 어플리케이션
30
Input device Control device Output device
• Hard-Wiring 구조 : 동력에 대한 직접 제어
• 이중화 회로 구현(Fail-Safe)
• 강제가이드 구조 : 출력 Relay및 MC a접점 용착 검지
• 안전신뢰성 : Category 1
-
ISO10218-1에 기반한 안전 기능 - 로봇제어기
M
M
制御回路 안전 관련부
로봇 컨트롤러
펜던트
이네이블 스위치
비상정지 스위치
로봇 본체
모드 전환 스위치
(차단기능)
제어 회로
비상 정지 스위치
(감속제어)
안전카테고리3、PLd에 적합한 회로
모터 드라이버
외부출력신호(인접장치 안전신호)
모드 전환 (Auto/Teach)
5.7 Operational modes
5.7.1 Selection
–보안기능(조작자의 제한)이 필요. 예) 키스위치 또는 패스워드에 의한 조작
–모드 선택을 외부로 표시(권장)5.8 Pendant controls
– 3 포지션의 이네이블스위치(가동허가장치)설치
외부신호 (비상정지 상태, 모드 선택 상태 등)는 카테고리 3, PLd에 적합 필요
5.5.3 Protective stop
–카테고리 3 PLd 필요
주변 장비의외부안전입력(보호정지)
※ 규격상에 의무는 아니지만, 인접장치와 연동한 로봇의 운용을 위해서는 필요
31
-
ISO10218-1에 기반한 안전 기능 - 로봇제어기
비상정지 스위치이네이블 스위치
비상정지 스위치셀렉트 스위치(키 스위치)
비상정지 스위치(기본)
비상정지 스위치(펜던드)
셀렉트 스위치(본체)
방호장치입력(외부입력)
동력 차단
비상정지(외부출력)
이네이블 상태(외부 출력)
모드 상태(외부 출력)
리셋
EDM
비상정지입력(외부입력)
*점선내는 규격외 추천이지만, 주변 설비와연동된 로봇의 운용을 위해서는 필요한 기능
안전컨트롤러
모드 상태
안전 관련부
32
-
위험구역
위험상황 1: 작업자 내부 진입이 자유롭기 때문에 위험 구역 內 사고 발생 가능
안전대책 1: 내부 작업 필요 시 펜스에 도어 스위치 설치외부 MODE(AUTO – TEACH) 변경 및 도어
스위치 UNLOCK_OPEN(구동부전원차단) 후도어 슬라이드 키 소지 후 진입
추가 사고발생 가능상황: 내부작업자 도어 슬라이드 키 미 소지 후장비 내부 출입 시 외부작업자로 인한 갇힘 및
추가사고 발생가능(AUTO RUN)
외부 작업자
내부 작업자
A22TK
유지보수 모드로전환
AUTO TEACH
ISO10218-2에 기반한 안전 기능 - 로봇주변장치
■ 로봇 설비의 추가 안전대책 1
33
-
위험구역
위험상황 2: 내부작업자 도어 슬라이드 키 미 소지 후장비 내부 출입 시 외부작업자로 인한 갇힘 및 추가사고
발생가능(AUTO RUN)
안전대책 2: 설비내부 MODE 스위치 적용 후 별도의 내부용 탈출 버튼,레버 또는 도어 UNLOCK S/W
제작(ex: EMS, Unlock 스위치)
추가 사고발생 가능상황: 설비 TEACHING 작업 시 위험 대상에 대한 별다른 안전 조치가 없으므로 충돌사고
가능성 有
A22LK
유지보수 모드전환
AUTO TEACH
외부 작업자
A22TK
AUTO TEACH
키: 빠지지 않음
설비 내부 추가 설치필요
도어 슬라이드 키
내부 작업자
ISO10218-2에 기반한 안전 기능 - 로봇주변장치
■ 로봇 설비의 추가 안전대책 1
34
-
위험구역
ISO10218-2에 기반한 안전 기능 - 로봇주변장치
위험상황 3: 설비 TEACHING 작업 시 위험 대상에 대한 별다른 안전 조치가 없으므로 충돌사고 가능성
有
안전대책 3: 작업 시 이네이블 스위치 사용 (3-POSITION TYPE으로 HOLD-TO-RUN 에서만 구동부
동작가능)
추가 사고발생 가능상황: 설비 내부 작업자 존재검지가 불가능하므로 작업 中 위험부 충돌사고 가능성 有설비 내 다인수
진입시 갇힘사고 및 내부 위험부 충돌사고 가능성 有
작업자 1인이 내부 모드 변경 후 외부 모드 RUN 변경가능 (잔류 작업자 위험 高)
A22LK
유지보수 모드전환
AUTO TEACH
A22TK
AUTO TEACH
키: 빠지지 않음
도어 슬라이드 키
내부 작업자
OR
■ 로봇 설비의 추가 안전대책 2
35
-
STOP
Door
RUN TEACH
RUN
내부 키스위치 On
RUN
Auto RUN Mode
Teaching운전
Teaching Mode
이네이블 그립 On
펜더트이네이블 On
ROBOT제어기 모드변경
RUN⇒Teach
인터록 By-Pass
■ 로봇 설비의 추가 안전대책 2(다인수 작업의 경우 추가 안전대책)
ISO10218-2에 기반한 안전 기능 - 로봇주변장치
36
file:///E:/産機DV/共通/VRP/8世代プレゼン資料/G8プレゼン/G6.ppt
-
위험구역
위험상황 4: 설비 내부 작업자 존재검지가 불가능하므로 작업 中 위험부 충돌사고 가능성 有
안전대책 4: 존재검지형 광전자 식 센서 및 MAT S/W 사용으로 확실한 안전보장
A22LK
유지보수 모드전환
AUTO TEACH
A22TK
AUTO TEACH
키: 빠지지 않음
내부 작업자
ORMATS/W
도어 슬라이드 키
ISO10218-2에 기반한 안전 기능 - 로봇주변장치
■ 로봇 설비의 추가 안전대책 3
37
-
위험구역
위험상황 4: 설비 내부 작업자 존재검지가 불가능하므로 작업 中 위험부 충돌사고 가능성 有
안전대책 4: 존재검지형 광전자 식 센서 및 MAT S/W 사용으로 확실한 안전보장
A22LK
유지보수 모드전환
AUTO TEACH
A22TK
AUTO TEACH
키: 빠지지 않음
도어 슬라이드 키
내부 작업자
OR
레이져스캐너
■ 로봇 설비의 추가 안전대책 3-1
ISO10218-2에 기반한 안전 기능 - 로봇주변장치
38
-
위험구역
위험상황 4: 설비 내부 작업자 존재검지가 불가능하므로 작업 中 위험부 충돌사고 가능성 有
안전대책 4: 존재검지형 광전자 식 센서 및 MAT S/W 사용으로 확실한 안전보장
A22LK
유지보수 모드전환
AUTO TEACH
A22TK
AUTO TEACH
키: 빠지지 않음
도어 슬라이드 키
내부 작업자
OR
라이트커튼
■ 로봇 설비의 추가 안전대책 3-2
ISO10218-2에 기반한 안전 기능 - 로봇주변장치
39
-
협동 로봇 안전 대책
40
-
ISO 10218-2, ISO/TS 15066에 따른 협동 작업 모드
협동 작업 공간에서 작업자가 위험에 접근하거나 노출되기 전에 로봇 시스템이 정지• 부품의 로딩 또는 언로딩 장비,
검사 장비
안전 정격 감시 정지 시스템(Safety-rated monitored stop)
작업자가 도착하면 로봇이 정지. 작업자가 직접 인터페이스를통해 로봇 이동을 유도.작업자의 동작 명령에 따라
움직임.• 로봇틱 리프트 어시스트, 제한된 또는 소량 생산
핸드 가이딩 (Hand guiding)
▣ 4가지 시스템을 개별적 또는 함께 사용하여 안전 대책
속도 및 분리 모니터링(Speed and separation monitoring)
장애물이 감지될 때 로봇 속도가 감소하는 경우 거리 별 분리모니터링. 로봇 속도는 분리된 거리에 따라 구역별 속도
설정.• 간단한 작업 ,직접 작업 인터페이스
동력 및 힘 제한(Power and force limiting by inherent design or
control)
로봇에 의해 시작된 부수적인 접촉이 운전자에게 해가 되지않도록 에너지를 제한• 작거나 가변적인 어플리케이션,
작업자의 작업 빈도가 매우
높은 조건
41
-
안전 정격 감시 정지 시스템 - 어플리케이션
● 협동 작업 영역을 감지 하기 위한 추천 안전 기기
광전자식 보호 장치(안전 라이트 커튼)
F3SG-R 시리즈
레이저 스캐너OS32C 시리즈
안전메트UMA 시리즈
• 안전 기기 사용으로 오동작 방지• 로봇이 정위치(정지) 되면 작업자가
협동작업 영역에서 작업 가능• 드라이브 전원은 켜놓은 상태.• 장애물이 사라지면 동작을 재개함• 정지 조건
위반(로봇 동작중 작업자가 접근)시 보호 정지 동작
위험영역(협동 작업 영역)에작업자와 로봇이 동시 감지되면
로봇은 보호정지
42
-
안전 정격 감시 정지 시스템 - 어플리케이션
● 협동 작업 영역을 감지 하기 위한 추천 안전 기기
광전자식 보호 장치(안전 라이트 커튼)
F3SG-R 시리즈
레이저 스캐너OS32C 시리즈
• 안전 기기 사용으로 오동작 방지• 로봇이 협동작업 영역에 없으면(정상운전)
작업자가 협동작업 영역에서 작업 가능• 드라이브 전원은 켜놓은 상태.• 정지 조건 위반(로봇 동작중 작업자가
접근
또는 작업자 작업시 협동 작업영역으로 로봇의 접근)시 보호 정지 동작
위험영역(협동 작업 영역)에작업자와 로봇이 동시 감지되면
로봇은 보호정지
전용 컨트롤러G9SX-GS 시리즈
43
-
핸드가이딩 - 어플리케이션
• 안전 기기 사용으로 오동작 방지• 로봇이 협동작업 영역에 없으면(정상운전)
작업자가 협동작업 영역에서 작업 가능• 드라이브 전원은 켜놓은 상태.• 로봇의 비협동 동작중 작업자가 접근시
보호 정지 동작
작업자 정위치에서 수동동작위험영역(협동 작업 영역)에
작업자가 없을 때만 비협동 동작
● 협동 작업 영역을 감지 하기 위한 추천 안전 기기
레이저 스캐너OS32C 시리즈
전용 컨트롤러G9SX-GS 시리즈
안전메트UMA 시리즈
44
-
핸드가이딩 - 어플리케이션
• 안전 기기 사용으로 오동작 방지• 로봇과 협동작업 시
로봇암 부분 뮤팅 또는 블랭킹• 로봇암 미감지시에만 비협동 작업 가능• 정지 조건 위반(로봇 동작중 작업자가
접근
또는 작업자 작업시 협동 작업영역으로 로봇의 접근)시 보호 정지 동작
작업자 위험영역 침입시 보호정지로봇암 감지시 라이트커튼 무효
● 안전 대책을 위한 추천 안전 기기
레이저 스캐너OS32C 시리즈
광전자식 보호 장치(안전 라이트 커튼)
F3SG-R 시리즈
45
-
속도 및 이격 감시 - 어플리케이션
• 안전 기기 사용으로 오동작 방지• 로봇 운전중에 사람의 위치에 따라
로봇의 속도를 제어• 드라이브 전원은 켜놓은 상태.• 장애물이 사라지면 동작을 정상 운전• 일정 영역 이상 접근시
보호 정지 동작
● 협동 작업 영역을 감지 하기 위한 추천 안전 기기
레이저 스캐너OS32C 시리즈
위험영역(협동 작업 영역)에 작업자가 감지되면 영역에 따라 로봇의 속도를 제어
46
※ 아직 완벽한 PLd등급을 만족하지는 않음
-
속도 및 이격 감시 - 어플리케이션
위험영역(협동 작업 영역)에 작업자가 감지되면 영역에 따라 로봇의 속도를 제어
• 안전 기기 사용으로 오동작 방지• 로봇 운전중에 사람의 위치에 따라
로봇의 속도를 제어• 드라이브 전원은 켜놓은 상태.• 장애물이 사라지면 동작을 정상 운전• 일정 영역 이상 접근시
보호 정지 동작
● 협동 작업 영역을 감지 하기 위한 추천 안전 기기
향후 미래 개발 상품
47
-
동력 / 힘 제한 - 어플리케이션
작업자와 부딫히더라도작업자가 다치지 않게 한계값을 조절
● 안전 대책을 위한 추천 안전 기기
로봇 자체에서 기능을 지원하거나 이를 입증 할 수 있는 검사장비의 필요
• 두가지 상황에 대해 고려- 준정적 접촉: 로봇 시스템의 움직이는 부분과 로
봇 작업 셀 내의 고정되거나, 움직이는 부품 사이에 사람의 신체 일부가 끼이는 경우
- 동적 접촉: “동적 충격”이라고도 하며, 사람의 신체 일부가 로봇 시스템의 움직이는 부품에 의해충격을 받아
접촉된 부분이 죄이거나 끼지 않고, 몸을 움츠리거나 로봇으로부터 멀어지도록 움직임
48
-
로봇 위험성 평가 시 유의 해야 할 점
▣ 설비 특성에 맞는 협동 운전 어플리케이션의 제안
▣ 로봇의 설계 / 운전 / 유지보수 측면에 따른 RISK를 분석
설계
/
셋업
운전
/
운용
유지보수
제어 로봇
안전
설계뿐만 아니라 운전, 유지보수 측면에서의RISK 분석 및 대책도 중요
토탈 솔루션으로 제어부터 로봇까지다방면을 고려한 안전 어플리케이션의 제안
예)
예)
49
-
로봇에서 예측할 수 있는 RISK
• 로봇 자체의 오동작, 폭주- 로봇 제어 회로 보드의 고장- 제어 선로 고장으로 인한 오동작(단선, 합선)- 설비
제어 신호의 오신호로 인한 오동작
(설비 제어기기의 오류)- 노이즈로 인한 고장
• 안전 거리의 미확보- 협소한 장소로 작업자의 공간 확보 부족- 로봇의 안전 거리 미확보- 비협동 작업에서
협동작업으로 전환점의
거리부족으로 비협동 작업이 끝나기전작업자가 진입
• 로봇의 설정 오류- 협동 모드에서의 안전 속도 오류- 협동 모드에서 로봇 접촉시 신체 부위 압력
오류
• 안전거리 및 속도 계산의 어려움- 난해한 계산식으로 설계자가 계산이 어려움
• 작업자의 실수- 작업자의 버튼 오조작- 작업자의 협동, 비협동 모드의 구분 오류- 작업자가 협동 구역을 혼동-
협동 작업 시 작업자의 작업순서를 혼동- 작업자가 로봇의 상태를 모르는 상태로
작업하여 긴장상태 지속(인간공학)
• 로봇 교체시- 오배선, 오접속으로 로봇의 오동작- 설정 변경으로 안전기능이 동작하지 않음
스펙선정
• 작업자 보호기기 오동작- 검증되지 않은 기기 사용으로 오동작- 기기의 고장으로 안전기능 동작 안함.
설계단계
운전단계
셋업단계
유지보수
50
-
로봇의 예상되는 RISK 분석
RISK SOLUTION
로봇 자체의 오동작, 폭주- 로봇 제어 회로 보드의 고장- 제어 선로 고장으로 인한 오동작(단선, 합선)- 설비
제어 신호의 오신호로 인한 오동작
(설비 제어기기의 오류)- 노이즈로 인한 고장
신뢰성 있는 안전 회로 구축제어 시스템의 안전관련 요소들은안전카테고리 3을 가지는 PL = d를 준수(ISO
13849-1, ISO 10218-1)
또는20년 미만 간격을 가진 증명 시험을 가지는하드웨어 고장 허용 1을 갖는 SIL 2를 준수(IEC
62061:2005)
로봇 제어 회로 보드 내 전용 신호 구축
협동 작업 신호
인터락 신호
비상 정지 신호
51
-
로봇의 예상되는 RISK 분석
RISK SOLUTION
안전 거리의 미확보- 협소한 장소로 작업자의 공간 확보 부족- 로봇의 안전 거리 미확보- 비협동 작업에서
협동작업으로 전환점의
거리부족으로 비협동 작업이 끝나기전작업자가 진입
로봇 반경을 고려한 안전 거리의 확보- 로봇의 최대 반경과 펜스사이의 500mm
이상 공간을 확보- 비협동 작업에서 협동작업으로 변경 되는
지점도 안전 거리를 충분히 고려한다.
52
-
로봇의 예상되는 RISK 분석
RISK SOLUTION
로봇의 설정 오류- 협동 모드에서의 안전 속도 계산- 협동 모드에서 로봇 접촉시 신체 부위 압력
자동 계산 프로그램 또는 문서 양식의 공통화설계자의 로봇 설정 오류를 줄이기 위해전용 프로그램, 전용기기 사용으로
안전 거리와속도, 압력을 계산하고 문서화.(ISO TS 15066)
안전거리 및 속도 계산의 어려움- 난해한 계산식으로 설계자가 계산이 어려움
53
-
협동 로봇의 예상되는 RISK 분석
RISK SOLUTION
작업자의 실수- 작업자의 버튼 오조작- 작업자의 협동, 비협동 모드의 구분 오류- 협동 작업 시 작업자의 작업순서를
혼동- 작업자가 로봇의 상태를 모르는 상태로
작업하여 긴장상태 지속(인간공학)
작업자가 알기 쉬운 설계 반영- 작업자의 작업버튼, 티칭조작 버튼, 화면 조작
버튼의 색상 통일화(협동 영역 바닥에 표시)- 타워 램프, 지시가이드, 스피커 소리로
작업자에게 작업순서를 가이드- 협동 비협동 작업의 가이드를 작업자의
위치 감지로 안전회로에서 결정
54
-
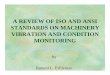
오므론에서 생각하는 향후의 협동 로봇의 방향성
생산성과 유연성 모두를 향상 할 수 있는 사람과 로봇 작업의 극대화
- 비숙련 노동자도 안전하고 안정적으로 다양한 제품을 생산할 수 있도록 한다. -
>
Interactive2018
Interactive2020
・ 작업 범위 제한단순 작업의 대체
・ 펜스리스 컨셉, 저속 공동 생산(정지에 의한 안전 확보)
Interactive2025
· 협동 · 모바일 로봇 기술
· 2D 안전 기술(라이트커튼, 레이저스캐너)
· 로봇 핸들링 기술 진화
· 3D 안전 기술
기술
진화
· 3D 안전 센싱 기술 융합
· 동작 예측 소프트웨어 기술
· 고속 협동 안전 제어 기술
사람이 중심이 되는 협동 작업 로봇이 중심이 되는 협동 작업시장
・ 작업 범위 확대조립 공정에서 향상된 생산성・ 펜스리스, 속도 조절 협동 생산
(Safety Zoning 의한 안전 확보)
・ 작업 범위를 자유롭게 (혼류 작업)혼류 라인에서 사람과 로봇의 생산성을 향상
・ 유연한 면적당 생산성의 극대화(자율, 분산, 협동 안전 제어에 의한 안심 · 안전)
55
-
감사합니다!
78