Embed Size (px)
Citation preview

PH 221-3A Fall 2010
EQUILIBRIUM and ELASTICITYELASTICITY
Lectures 20-21
Chapter 12 (Halliday/Resnick/Walker, Fundamentals of Physics 8th edition)( y , y )
1

Chapter 12Equilibrium and Elasticity
In this chapter we will define equilibrium and find the conditions needed so that an object is at equilibrium.
We will then apply these conditions to a variety of practical engineering problems of static equilibrium.
We will also examine how a “rigid” body can be deformed by an t l f I thi ti ill i t d th f ll iexternal force. In this section we will introduce the following
concepts:
Stress and strainStress and strain Young’s modulus (in connection with tension and compression) Shear modulus (in connection with shearing)
lk d l (i i h d li )Bulk modulus (in connection to hydraulic stress)2

We say that an object is in equilibrium when the following two conditionsEquilibriumWe say t at a object s equ b u w e t e o ow g two co d t o s are satisfied:
1. The linear momentum of the cnter of mass is constantP
2. The angular momentum about the centeL
r of mass or any other point is a constant
Our concern in this chapter is with situtations in which 0 and 0P L
pThat is we are interested in objects that are not moving in any way (this includes translational as well as rotational motion) in the reference frame from which we observe them Such objects are said to be in static equilibriumfrom which we observe them. Such objects are said to be in In chapter 8 we differentiated betwe
static en stab
equilible and
rium unstable static equilibrium
If a body that is in static equilibrium is displaced slightly from this positionthe forces on it may return it to its old position. In this case we say that theequilibrium is . If the body does not return to its old position then the equilibrium is
stableun stable.q
3

A simple method for the experimental determination of the center of mass of a body of a complicated shape
A rigid body supported by an upward force acting at a point on the vertical line through its center of mass is in equilibrium
The center of mass is at the intersection of the new and old prolongations of the string.
Stable, unstable and neutral equilibriumA b d d d f i t b it t f i i t bl ilib iA body suspended from a point above its center of mass is in stable equilibrium
2) The force of gravity and supporting force produce a torque that tends to return the body to the equilibrium position.
4

If the body is supported by a force applied at a point below the center of mass it is in unstable equilibrium
A chair supported at a point directly pp p ybelow the center of mass. If we turn the chair slightly the chair tends to topple over.pp
A body supported at its center of mass is in neutral equlibrium
If we turn such a body, it remains in equilibrium in its new position and exhibits no tendency to return to its original position or to turn farther away.
5

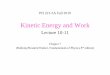
An example of is shown in the figuresIn fig.a we balance a domino with the domino's center of mass
unstable equilibriumIn fig.a we balance a domino with the domino s center of massvertically above the supporting edge. The torque of the
gravitational force gF
about the supporting edge is zero
because the line of action of passes through the edge. gF
Th th d i i i ilib i E li ht f th d i dThus the domino is in equilibrium. Even a slight force on the domino ends
the equilibrium. As the line of action of moves to one side of the supporting
edge (see fig.b) the torque due to ig
g
F
F
s non-zero and the domino rotates g ( g ) q g
in the clockwise direction away from its equilibrium position of fig.a.The domino in fig.a is in a position of unstable equilibrium.Th d i i fi i t it t bl T t l th d i thThe domino is fig.c is not quite as unstable. To topple the domino the applied force would have to rotate it through and beyond the position of fig.a. A flick of the finger against the domino can topple it.
6

In chapter 9 we calculated the rate of change for the linear momentum of the centerThe Conditions of equilibrium
d
of mass of an object. If an object is in translational equilibrium t nhenetdP Fdt
constant and thus 0 0dPP F
constant and thus 0
In chapter 11 we analyzed rotational motion and saw that Newton's second law takes the
f F bj t i t ti l ilib i h
0netPdt
dL
F
t tL
form: For an object in rotational equilibrium we have:netdt
constant
0 0 net
L
dLdt
The two requirements for a body to be in equilibrium are:dt
1. The vector sum of all the external forces 0 netF
on the body must be zero
2. The vector sum of all the external torques
net
0
that act on the body measured about any point must be zero
0net
7

, , ,
In component form the conditions of equilibrium are:Balance of forces: 0 0 0
B l f 0 0 0net x net y net zF F F
, , ,Balance of torques: 0 0 0
We shall simplify mattenet x net y net z
rs by considering only problems in which all the forces that act on the body lie in the xy-plane. This means that the only torques generated by these forces tend to cause rotation about an axis parallel to the z-axis. With thisassumption the conditions for equilibrium become:Balance of forces: 0 0F F ,
,
,
,
Balance of forces:
Balance of torques: Here is the net torque prod
0 0
uced l0
by a
net x net y
net z
net z
F F
l external forces either aboutthe z-axis or about axis parellel to it.
Finally for static equilibrium the linear momentum of the center of mass
must be zer
any
0o:
P
P
must be zer 0o: P
0 0F F , ,
,
0 00
net x net y
net z
F F
8

h i i l f i d d b d i h f hThe center of Gravity (c g)oThe gravitational force acting on an extended body is the vector sum of thegravitational forces acting on the individual elements of the body. The gravitational
force F
on a body effectively acts at a single point known as the center of gravityforce gF on a body effectively acts at a single point known as the center of gravity
of the body. Here "effect If the individual
gravitational
ively" has the following meaning
forces on the elements of th
:
e body are turned off and replaced by gF
acting at the center of gravity, then the net force and the net torque about any pointon the body does not chang We shall prove that if the acceleration o ge. f ra
g
vity isg
center of gravitycenter of mass
the same for all the elements of the body then the coicides with the . This is a reasonable approximation for objects near the surface of the earth because changes very little.gof the earth because changes very little.g
9

Consider the extended object of mass shown in fig.a. In fig.awe also show the i-th element of mass . The gravitational forcei
Mm
on is equal to where is the acceleration of gravity ini i i im m g g the vicinity of . The torque on is equal to . The net torque
(eqs 1)i i i gi im m F x
F x
(eqs.1)
Consider now fig.b in which we have replaced the forces by the
net gravitational force
net i gi ii i
gi
F x
F
F
acting at the center of gravity The netnet gravitational force gF acting at the center of gravity. The net
torque is equal to : (eqs.2)net net cog g cog gii
τ x F x F
If we compare equation 1 with equation 2 we get:
We substitute for and we have:
cog gi gi ii i
x F F x
m g F x m g m g x
We substitute for and we have:
If we set for all the elements
i i gi cog i i i i ii i
i ii
i cog com
m g F x m g m g x
m x g g x x
i cog com
ii
g gm
10

Statics Problem Recipe
1 D f di (L b l th )1. Draw a force diagram. (Label the axes) 2. Choose a convenient origin O. A good choice is to
have one of the unknown forces acting at Ohave one of the unknown forces acting at O3. Sign of the torque for each force:
- If the force induces clockwise (CW) rotation + If the force induces counter-clockwise (CCW) rotation
4. Equilibrium conditions: , ,0 00
net x net yF F q
5 Make sure that:
, 0net z
5. Make sure that: numbers of unknowns = number of equations 11

Examples of Static Equilibrium
A locomotive of 90,000 kg is one third of the way across a bridge 90 m long. The bridge consists of , g y g g ga uniform iron girder of 900,000 kg, which rests at two piers. What is the load on each pier?
Method:1. Select the body which is to obey the equilibrium
condition2 List all the external forces that act on this body and2. List all the external forces that act on this body and
display them on a free body diagram3. Choose coordinate axes and resolve the forces into x
and y components. (+ or – with respect to positive direction that you have chosen)direction that you have chosen)
4. Apply equilibrium condition: ΣFx = 0ΣFy = 0
5. Make a choice of axis rotation. Choose positive direction of rotation Apply the static equilibriumdirection of rotation. Apply the static equilibrium condition
6. Solve the equations in steps 4 and 5 for the desired unknown quantities.
12

+N1
-
13

A uniform beam of length and mass = 1.8 kg is at rest on two scales.
Sample Problem 12-1.L mA uniform block of mass = 2.7 kg is at rest on the beam at a distance /4 from its left end. Cal uc lat
ML
e the scales readingsCal uc lat
,
e the scales readings0 (eqs.1)
We choose to calculate the torque with repsect to an i h h h l f d f h b ( i O)
net y rF F F Mg mg
Oaxis through the left end of the beam (point O).
, 0 (eqs.2)4 2
2.7 9.8 1.8 9.8From equation 2 we get: 15 44 15 N
net z rL LMg mg L F
Mg mgF
From equation 2 we get: 15.44 15 N4 2 4 2
We solve quation 1 for = 2.7+1.8 9.8 15.44 28.66 N29 N
r
r
F
F F Mg mg FF
29 NF
14

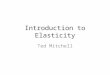
A ladder of length = 12 m and mass = 45 kg leans against a frictionless wall.Sample Problem 12-2: L
mThe ladder's upper end is at a height = 9.3 m above the pavement on which the lower end rests.
hThe com
of the ladder is /3 from the lower end. A firefighterL
2 2
g of mass = 72 kg climbs half way up the ladderFind the forces exerted on the ladder by the wall
d h Di 7 58
M
L h2 2and the pavement. Distance 7.58a L h m
We take torques about an axis through point O.
0a ah F M
, 03 2
9 8 7 58 72 / 2 45 / 32 3
net z wa ah F mg Mg
M mga
,
9.8 7.58 72 / 2 45 / 32 3 407 N 410 N9.3
0 410 N
0 9 8 2 4
w
net x w px px w
Fh
F F F F F
1146 6 1100, 0 9.8 72 4net y py pyF F Mg mg F Mg mg 5 1146.6 N 1100 N
15

A safe of mass = 430 kg hangs by a rope from a boom with dimensions = 1.9 m and
2 5 Th b f th b h 85 k
Sample Problem 12-3: Ma
b = 2.5 m. The beam of the boom has mass = 85 kgFind the tension in the cable and the mc
b mT agnitude of the
net force exerted on the beam by the hinge.F
We calculate the net torque about an axis normal to the page that passes through point O.
b , 02
9 82
net z c rba T b T mg
mgb M
2 5 430 85 / 2 9.82
cTa
2.5 430 85 / 26100 N
1.9
0 6093 NF F T F T
,
,
2 22 2
0 6093 N
0 9.8 85 430 5047 N
6093 5047 7900 N
net x h c h c
net y v r v r
F F T F T
F F mg T F mg T g m M
F F F
6093 5047 7900 Nh vF F F
16

A 70 kg rock climber hangs by the crimp hold of one hand. Her feet touch the rock directly below her fingers. Sample Problem 12-4:
Assume that the force from the horizontal ledge supporting her fingers is equally shared by the four fingers. Calculate the horizontal and vertical components and of the forcehF F
,
horizontal and vertical components and of the force on each fingertip.
4 0
h v
net x N h
F F
F F F
O,
70 9.84 0 171.5 N 170 4 4net y v v
mgF F mg F N
We calculate the net torque about an axis that is perpendicular to the page and passes through point O.
,
p g p0 0.2 2.0 4 0 4 0
0.20 70 9.8 17.15 N 17 N4 2 0
net z N h v
h
F mg F F
F
4 2.0
17

Problem (static equilibrium): The drawing shows an A-shaped ladder. Both sides of the ladder are equal in length. This ladder standing on a frictionless horizontal surface, and only the crossbar (which has a negligible mass) of the “A” keeps the ladder from collapsing. The ladder is uniform
d h f 20 0 k D t i th t i i th b f th l ddand has a mass of 20.0 kg. Determine the tension in the crossbar of the ladder.
18

For the problems in this chapter we have the following threeti t di l
Indeterminate Structures.
, , ,
equations at our disposal: 0 0 0
If the problem has more than three unknowns we canet x net y net zF F
nnot solve itWe can solve a statics problem for a table with three legs but not for one with four legs. Problems like these are caindetermi
llednateindeterminate
An example is given in the figure. A big elephant sits on a wobly table. If the tabledoes not collapse it will deform so that all four legs touch the floor. The upward forces exerted on the legs by the floor assume definite and different values. How can we calculate the values of these forces? To solve such an indeterminatecan we calculate the values of these forces? To solve such an indeterminate equilibrium problem we must supplement the three equilibrium equations with some knowledge of , the branch of physics and engineering that describes elasticityhow real bodies deform when forces are applied to them.
19

Metallic solids consist of a large number of atoms positioned on a regular three dimensional lattice
Elasticity
positioned on a regular three-dimensional lattice as shown in the figure. The lattice is repetition of a pattern (in the figure this pattern is a cube)
Each atom of the solid has a well-defined equilibrium distance from itsnearest neighbors. The atoms are held together by interatomic forces that can be modeled as tiny springs. If we try to change the interatomic distance the resulting force is proportional to the atom displacement from the equilibrium position. The spring constants are large and thus the lattice is q p p g gremarkably rigid. Nevertheless all "rigid" bodies are to some extend elastic, which means that we can change their dimensions slightly by pulling, pushing,twisting or compressing them For example if you suspend a subcompact cartwisting or compressing them. For example, if you suspend a subcompact car from a steel rod 1 m long and 1 cm in diameter, the rod will stretch by only 0.5 mm. The rod will return to its original length of 1 m when the car is removed.If you suspend two cars from the rod the rod will be permanently deformed. If you suspend three cars the rod will break. 20

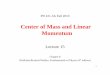
stress = modulus strain
In the three figures above we show the three ways in which a solid might changeits dimensions under the action of external deforming forces. In fig. the cylinder ais stretched by forces acting along the cylinder axis. In fig. the cylinder is deformed by forces perpendicular to its axis. In fig. a solid placed in a fluid under high pressure is compressed uniformly on all sides. All three d
bc
eformationtypes have in common (defined as deforming force per unit area).These stresses are k tensile/compressive shearingnown as for fig.a, for fig.b, and for fig c
hydra The
st
apu p
ress
lilic cation of stress on a solid results in strainand for fig.c. hydra The apu plilic cation of stress on a solid results in strain,or unit deformation. The stresses and strains take different forms , but over the range of engineering usefulness stress and strain are proportional to each o stress = modulus ther s: train
21

is defined as the ratio where is the solid areaTensile stress FA
L
A
is defined as the ratio where
is the change in the length of the
(sym
cyli
Strain
ndrical solid. Stre
bol
ss
)
is plotted v
LL
LS
L
ersus strain in the upper figureStress is plotted versus strain in the upper figure. For a wide range of applied stresses the stress-strain relation is linear and the solid returns to its original F LE
A L
A
length when the stress is removed. This is known as the . If the stress is increased beyond a maximum value
known as the yield strength the cylinder becomes permanently elastic range
yS
deformed. If the stress continues to increase the cylinder breaks y
at a stress value known as ultimate strength uS
yFor stresses below S (elastic range) stess and strain are connected via the equation
The Young's modulus constant (modulus) is known as: F LEA L
E
Note: Young's modulus is almost the same for tenA L
sion and compressionThe ultimate strength maybe different uS
22

A
In the case of shearing deformation strain
i d fi d th di i l ti Th t / t i
Shearing:xis defined as the dimensionless ratio . The stress/strain
equation has the form:F x
L
G
The constant is kno shearwn as modulu the s
xL
G
GA
F xGA L
F The stress is this case is the pressure
the surrounding fluid exerts on the immersed object. Here
Hyrdaulic Stress. FpA
A
A is the area of the object. In this case strain is defined as the
dim ne sionless ratio where is the volume of the objectV VV
and the change in the volume due to the fluid pressure. The
stress/strain equation has the form: The constant VpV
V
B
Vp BV
is known a bulk ms the B of the mateo rdulus ial
V
23

Problem 43. A horizontal aluminum rod 4.8 cm in diameter projects 5.3 cm from a wall.A 1200 kg object is suspended from the end of the rod. The shear modulus of aluminum is
10 23.0x10 N/m . Neglecting the rod's mass, find (a) the shear stress on the rod and (b) the vertical deflection of the end of the rod.
( ) Th h t i i b F/A h F i th it d f th f li d(a) The shear stress is given by F/A, where F is the magnitude of the force applied parallel to one face of the aluminum rod and A is the cross–sectional area of the rod. In this case F is the weight of the object hung on the end: F = mg, where m is the mass of the object. If r is the radius of the rod then A = r2. Thus, the shear stress is
26 2
2 2
(1200 kg) (9.8m/s ) 6.5 10 N/m .(0.024 m)
F mgA r
(b) The shear modulus G is given by
G F Ax L
//
where L is the protrusion of the rod and x is its vertical deflection at its end. Thus,
6 2
5( / ) (6.5 10 N/m )(0.053m) 1 1 10F A L 5
10 2
( ) ( ) ( ) 1.1 10 m.3.0 10 N/m
xG
24