Embed Size (px)
Citation preview

MEMORIAS DEL XIX CONGRESO INTERNACIONAL ANUAL DE LA SOMIM
25 al 27 DE SEPTIEMBRE, 2013 PACHUCA, HIDALGO, MEXICO
Equipo Experimental Para el Desarrollo de Practicas de Vibraciones
Mecanicas
Pablo Cesar Lopez Custodio 1, J. M. Rico 1, J.J. Cervantes Sanchez 1, Noe Ramon Sanchez Farias 1,
Eduardo Daniel Duran Vargas 1, Ramiro Jimenez Martınez 1
1Universidad de Guanajuato, Division de Ingenierıas, Campus Irapuato-Salamanca
Carretera Salamanca-Valle de Santiago km 3.5+1.8, Salamanca, Guanajuato, 36885, Mexico.
Tel.: +52-464-6479940
RESUMEN
Esta contribucion presenta el desarrollo de unconjunto de practicas para el curso de vibra-ciones mecanicas empleando equipo construi-do en nuestra universidad, bastante economi-co y, a juicio de los autores, dentro de las posi-bilidades de la mayoria de las instituciones deeducacion superior del pais. Las practicas de-sarrolladas cumplen el requisito de permitircomparar los resultados teoricos —contenidosen un curso de licenciatura de vibracionesmecanicas— con los resultados experimen-tales que se obtienen durante el desarrollo delas practicas.
ABSTRACT
This constribution presents the developmentof a set of experiments for a mechanical vi-brations course. The experiments use in houseequipment, quite affordable and, in the opin-ion of the authors, between the finantial possi-bilities of most of the higher education institu-tions in the country. The experiments devel-oped satisfy the requirement of allowing thestudents to compare the theoretical results —contained in the syllabus of a bachellor de-gree mechanical vibrations course— with theresults obtained during the experiments.
INTRODUCCION.
Una queja frecuente de los estudiantes du-rante el desarrollo de las licenciaturas en lasdiferentes ramas de la ingenierıa, en particu-lar la ingenierıa mecanica, es la falta de expe-riencias practicas que le permitan compren-der, de manera mas completa, conceptos y
resultados relativamente abstractos. Dejandode lado cuestionamientos acerca del pobre fi-nanciamiento a las instituciones publicas deeducacion superior del paıs y las acusacionesde despilfarro y corrupcion en esas mismasinstituciones, es indudable que, en general, lacurrıcula de la ingenierıa mecanica en la granmayorıa de las instituciones de educacion su-perior esta corta de experiencias practicas ode laboratorio que facilite la instruccion delos diferentes cursos. Esta situacion se tornaaun mas dramatica en el caso del curso de vi-braciones mecanicas. En algunas institucioneslos cursos de vibraciones mecanicas son opta-tivos y se ofrecen, en realidad, ocasionalmentey de manera completamente teorica. En otroscasos, malas decisiones acerca de la adquisi-cion de equipo de laboratorio conduce a unasituacion en la cual las experiencias “practi-cas” se reducen a observar los fenomenos sinla posibilidad de comparar los conocimientosteoricos adquiridos con los que podrıan obte-nerse en esas experiencias.
Desde hace mas de quince anos, uno delos autores de esta contribucion ha realiza-do pequenos proyectos dirigidos a mejorar laensenanza de las vibraciones mecanicas a ni-vel de licenciatura,1 con enfasis en el desa-rrollo de experimentos que permitan ilustrarlos conceptos fundamentales y mas abstractosde la teorıa. Hace quince anos, el moto de esteproyecto era “Ningun estudiante de ingenierıamecanica debe egresar sin haber observado yanalizado el fenomeno de resonancia”, en laactualidad es razonable ser mas ambicioso y
1Ese mismo autor esta completamente concienteque dado que las vibraciones mecanicas no es su areade investigacion principal serıa sumamente riesgoso in-tentar extender esos proyectos a nivel de posgrado.
Derechos Reservados c© 2013, SOMIM
ISBN 978-607-95309-9-0 Página | 544
MEMORIAS DEL XIX CONGRESO INTERNACIONAL ANUAL DE LA SOMIM
25 al 27 DE SEPTIEMBRE, 2013 PACHUCA, HIDALGO, MEXICO
el moto debe modificarse a “Ningun estudi-ante de ingenierıa mecanica debe egresar sinhaber observado y analizado los fenomenos deresonancia y de modo de vibracion”.
Afortunadamente, en los ultimos anos hanocurrido avances muy importantes en la medi-cion de vibraciones mecanicas. Hasta hacepoco tiempo, los instrumentos necesarios parala medicion de vibraciones mecanicas erananalogicos, poco flexibles y sumamente caros.Despues hubo un breve intervalo de tiempo,durante el cual, los instrumentos de medi-cion empezaron a emplear la electronica digi-tal y eran, basicamente, computadoras indus-triales con capacidades de adquisicion, proce-samiento, visualizacion y almacenamiento delas senales, desafortunadamente estos instru-mentos seguıan siendo sumamente caros. Enla actualidad es bastante economico comprarequipos de adquisicion de datos que acopladoscon acelerometros y computadoras digitalesusuales pueden realizar actividades de medi-cion, procesamiento, visualizacion y almace-namiento de vibraciones mecanicas de maneramas completa que los equipos digitales antesmencionados. Es importante senalar que unmanejo adecuado de los acelerometros per-mite una vida util de varias decadas y unacomputadora digital se encuentra al alcancede la gran mayoria de los estudiantes de edu-cacion superior del pais.
Con estos antecedentes, el unico compo-nente faltante es el desarrollo de los equiposexperimentales que permitan realizar laspracticas. La presente contribucion presentaun conjunto de tres practicas que es posi-ble realizar en un equipo desarrollado inicial-mente en el Instituto Tecnologico de Celayay el Centro Regional de Optimizacion y De-sarrollo de Equipo, CRODE, Celaya, y mo-dificado posteriormente en la Universidad deGuanajuato. Las practicas se disenaron sobrela premisa de que la practica debe incluir lamedicion de las caracterısticas de la vibracionque permitan comparar los resultados experi-mentales con los obtenidos con la aplicacionde la teorıas detras de los analisis de sistemasvibratorios lineales y discretos de uno o variosgrados de libertad.
Las practicas experimentales analizadas enesta contribucion son:
1. Resonancia de un sistema vibratorio de
un grado de libertad.
2. Absorbedor de vibraciones, sistema vi-bratorio de dos grados de libertad.
3. Frecuencias naturales y modos de vi-bracion en un sistema de tres grados delibertad.
DESCRIPCION DEL EQUIPO.
En esta seccion se describe brevemente elequipo utilizado para realizar los experimen-tos.
Prototipo Mecanico.
El prototipo implementado para representarlos sistemas masa-resorte se muestra en laFigura 1. Este sistema consta de cajas o ca-jones que pueden ponerse o quitarse paracrear sistemas de un numero variable de gra-dos de libertad. Las cajas se conectan conotras cajas o con las placas superior e infe-rior, que se mantienen fijas, mediante resorteshelicoidales de compresion. Estos resortes per-miten la presencia de un resorte interno adi-cional. De esta manera es posible obtener unagran variedad de valores de la constante equi-valente de los resortes.La fuerza de excitacion se obtiene median-
te un generador de vibraciones, el cual semuestra en la Figura 2. Este cuenta con dosflechas con engranes helicoidales y con pesosexcentricos identicos en ambos extremos decada flecha, de manera que la componente defuerza horizontal se cancela y el generador devibraciones produce una fuerza de excitacionarmonica vertical cuya amplitud es propor-cional al cuadrado de la velocidad angular. Lafrecuencia de excitacion se varıa controlandola velocidad del motor mediante un circuitovariador de velocidad.
Sensado y Adquisicion de Datos.
El software que se utiliza para procesar y de-splegar las senales sensadas es la plataformaLabVIEW c©. Para adquirir los datos se cuentacon el siguiente equipo:
1. Modulo de adquisicion de datos, marcaNational Instruments, Modelo NI 9234,
Derechos Reservados c© 2013, SOMIM
ISBN 978-607-95309-9-0 Página | 545

MEMORIAS DEL XIX CONGRESO INTERNACIONAL ANUAL DE LA SOMIM
25 al 27 DE SEPTIEMBRE, 2013 PACHUCA, HIDALGO, MEXICO
Figura 1: Prototipo de sistema vibratorio devarios grados de libertad.
Figura 2: Generador de vibraciones.
para senales de acelerometros ICP c©, se-rie 14A5966.
2. 4 Acelerometros ICP c©, marca PCBPiezotronics, modelo 352C03.
3. Chasis, marca National Instruments,Modelo NIcDAQ-9174 para cuatro modu-los, numero de serie 14BEB5B.
Las conexiones necesarias para obtener yprocesar las senales de los experimentos semuestran en la Figura 3. El modulo deadquisicion de datos se monta en el chasisde National Instruments, este se conecta a lacomputadora mediante USB. El o los acelero-metros se conectan a uno de los 4 canales delmodulo adquisitor de datos.
SENSADO ACONDICIONAMIENTO
PROCESAMIENTO Y
DESPLEGADO DE DATOS
Acelerómetro Tarjeta de Adquisición Laptop
Figura 3: Diagrama esquematico de laconexion para adquirir datos, procesar y des-plegar.
SISTEMA VIBRATORIO DE UN
GRADO DE LIBERTAD SUJETO A
VIBRACION FORZADA SIN AMOR-
TIGUAMIENTO.
En esta seccion, se analizara la respuesta deun sistema vibratorio de un grado de liber-tad sujeto a vibracion forzada y sin amor-tiguamiento. Como muestra la Figura 4, estesistema tiene una sola masa que puede des-plazarse verticalmente y que esta suspendidade un resorte de constante k, soportando supropio peso y la accion de una fuerza exter-na que varıa con el tiempo armonicamente deacuerdo a F (t) = F0senωt.Se sabe que cuando la frecuencia de ex-
citacion ω es igual a la frecuencia naturaldel sistema ωn =
√
k/M , el sistema entra enresonancia y la respuesta general del sistemaesta dada por:
yG(t) =1
2δ0 ωn sen (ωn t)−
1
2δ0 ω
2n t cos (ωn t)
(1)
Derechos Reservados c© 2013, SOMIM
ISBN 978-607-95309-9-0 Página | 546

MEMORIAS DEL XIX CONGRESO INTERNACIONAL ANUAL DE LA SOMIM
25 al 27 DE SEPTIEMBRE, 2013 PACHUCA, HIDALGO, MEXICO
Figura 4: Sistema vibratorio de un grado delibertad sujeto a vibracion forzada.
donde δ0 es la deformacion que sufrirıa el re-sorte si la fuerza externa fuera estatica, es de-cir δ0 = F0/k. La Figura 5 muestra el com-portamiento del sistema.
Figura 5: Comportamiento del sistema noamortiguado sujeto a vibracion forzada en re-sonancia.
Para este experimento se construye el sis-tema mostrado en la Figura 3. En este casose emplea una sola “caja”; es decir el sistematiene un unico grado de libertad. La caja con-tiene el generador de vibraciones que produceuna fuerza armonica vertical cuya magnitudes proporcional al cuadrado de la velocidadangular. La caja se conecta mediante 8 re-sortes, 4 exteriores y 4 interiores, a la placasuperior fija y mediante otros 8 resortes, 4 ex-teriores y 4 interiores, a la placa inferior. Lamasa de la caja y el generador juntos es deM = 8.22 kg y la constante total de los re-
sortes es de K = 93011.15N/m
Figura 6: Sistema vibratorio.
Resultados Teoricos.
Conociendo la masa M de la caja y el genera-dor de vibraciones ası como la constante totalde resorte, K, es posible calcular la frecuencianatural del sistema:
ωn =
√
K
M=
√
93011.15 Nm
8.22 kg
= 106.37rad
s= 1015.75 rpm. (2)
Es importante reconocer que todo sistematiene amortiguamiento en menor o mayormedida. En este caso, resultados experimen-tales previos muestran que la relacion deamortiguamiento es aproximadamente igual ac/cc = 0.002.
Resultados Experimentales.
Colocando el acelerometro como se indica enla Figura 6, conectandolo a la tarjeta adquisi-tora de datos y conectando el generador devibraciones a su fuente de potencia, el equipoexperimental esta listo para buscar la reso-nancia del sistema. Empleando el instrumen-to virtual mostrado en la Figura 7, es posibleobservar los resultados mediante el softwareLabVIEW c©, el instrumento virtual se disenade manera que se registre la senal sin filtrar,una senal filtrada mediante un filtro pasaban-da tipo Butterworth con frecuencias de cortede 14 Hz y 20 Hz.
Derechos Reservados c© 2013, SOMIM
ISBN 978-607-95309-9-0 Página | 547

MEMORIAS DEL XIX CONGRESO INTERNACIONAL ANUAL DE LA SOMIM
25 al 27 DE SEPTIEMBRE, 2013 PACHUCA, HIDALGO, MEXICO
Figura 7: VI implementado en LabVIEW.
Se enciende la fuente de potencia del gene-rador y con el control de velocidad se empiezaa variar la velocidad del motor hasta que vi-sualmente y observando los valores de ampli-tud de la vibracion o senal filtrada se sabeque el sistema esta en resonancia. La Figura8 muestra los resultados que se obtienen pre-cisamente en resonancia. Donde el parametrode la vibracion que se mide es la aceleraciony las unidades estan dadas en m/s2
Figura 8: Lectura de la senal.
Las lecturas de la senal filtrada muestranamplitudes nuy elevadas y cercanas a los 60m/s2, indicativas de que el sistema esta enresonancia. De esa misma grafica se conside-raran 5 ciclos para determinar la frecuencia dela vibracion la cual, en teorıa, debe ser iguala la frecuencia natural.
t1 = 0.65823 s,
t2 = 0.95645 s,
n = 5 ciclos.
de manera que es posible calcular el periodoy la frecuencia
T =∆t
n=
t2 − t1n
= 0.059644 s,
f =1
T= 16.76Hz,
de esta manera la frecuencia natural encon-trada experimentalmente es:
ωn = (16.766Hz)(60 s) = 1005.96 rpm (3)
Debe notarse que el valor de la frecuencianatural del sistema encontrado experimental-mente, ecuacion (3), es muy semejante al en-contrado a partir de la teorıa y la medicion delas masas y las constantes de los resortes, veaecuacion (2).
ABSORBEDOR DE VIBRACIONES.
En esta seccion, se analizara el cambio en larespuesta de un sistema vibratorio de un gra-do de libertad sujeto a vibracion forzada unavez que se le ha agregado un absorbedor de vi-braciones. Primeramente se considera un sis-tema de un grado de libertad como el mostra-do en la parte izquierda de la Figura 9, dondela fuerza de excitacion varıa en el tiempo deacuerdo a F (t) = F0senωt. Si la frecuenciade excitacion es muy cercana a la frecuencianatural del sistema la vibracion sera muy e-levada. Una posibilidad para eliminar esta vi-bracion consiste en agregar un segundo sis-tema masa-resorte tal como se muestra en laparte derecha de la Figura 9, el cual tiene unafrecuencia natural igual a la de excitacion.
Figura 9: Sistema vibratorio con absorbedorde vibraciones.
Se sabe que la ecuacion diferencial que go-bierna el sistema con absorbedor esta dadapor:
Derechos Reservados c© 2013, SOMIM
ISBN 978-607-95309-9-0 Página | 548
MEMORIAS DEL XIX CONGRESO INTERNACIONAL ANUAL DE LA SOMIM
25 al 27 DE SEPTIEMBRE, 2013 PACHUCA, HIDALGO, MEXICO
M
[
y1y2
]
+K
[
y1y2
]
=
[
F0senωt0
]
. (4)
donde, las matrices elastica, K, y de inercia,M , estan dadas por:
K =
[
k1 + k2 −k2−k2 k2
]
,
M =
[
M1 00 M2
]
Resolviendo la ecuacion (4) se tiene que larespuesta permanente del sistema esta dadapor:
[
y1y2
]
=
[
Y01
Y02
]
sin (ωt)
donde,
Y01 =
(
k2 −M2ω2)
F0
(k1 + k2 −M1ω2) (k2 −M2ω2)− k22(5)
Y02 =k2F0
(k1 + k2 −M1ω2) (k2 −M2ω2)− k22(6)
Si se sustituye el valor de k2 = M2ω2,
Y01 = 0 y, por lo tanto, y1(t) = 0, mientrasque y2(t) = F0
k2
sen(ωt). Suprimiendo de esamanera la vibracion de la primer masa.
Para construir el absorbedor de vibracionesrequerido en este experimento, se coloca unaviga en la parte superior del generador de vi-braciones y se le colocan masas identicas enlos extremos y, posteriormente, se monta unacelerometro en cada extremo. Por su parte,el sistema de un grado de libertad se montade igual manera que en el primer experimentodescrito en este trabajo, colocando una unicacaja sujetada por los resortes de constante to-tal conocida y colocando dentro de la caja elgenerador de vibraciones.
El experimento consiste en tres etapas:Primera etapa: Observar el sistema vibra-
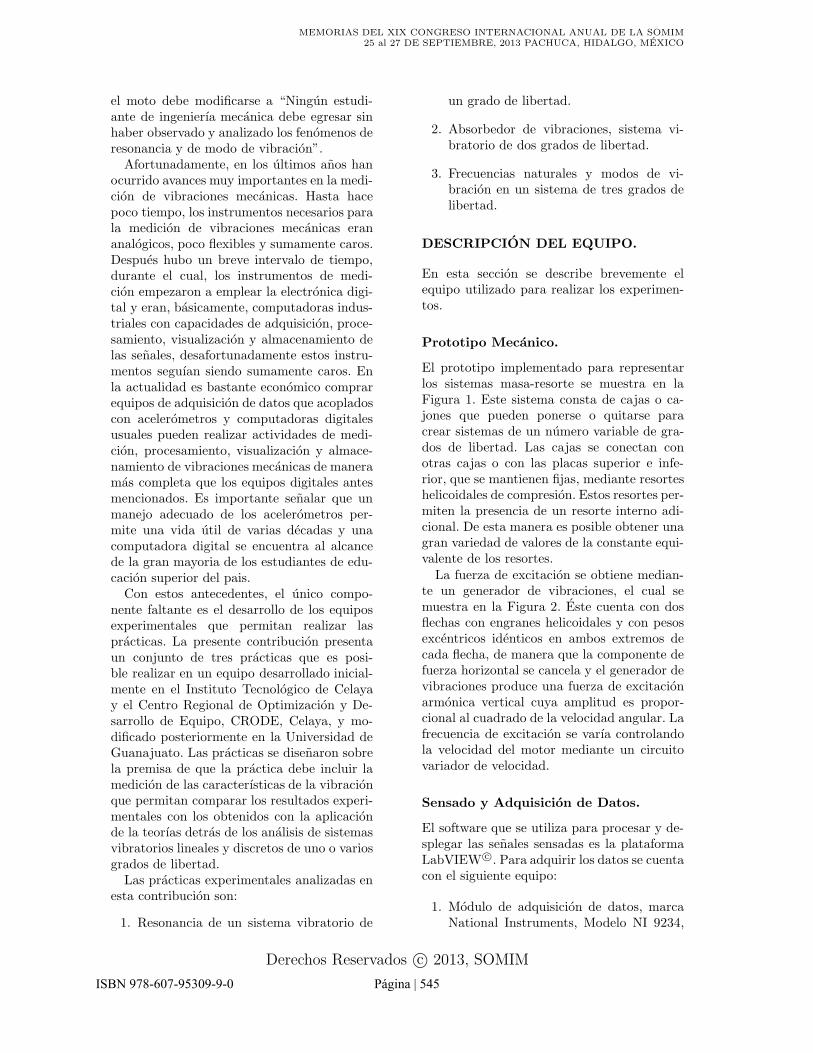
torio de un grado de libertad para una fre-cuencia cercana a resonancia, tal como se hi-zo en el primer experimento aquı presentado.Este sistema se muestra en la figura 10, dondela caja contiene al generador de vibraciones.
Figura 10: Sistema vibratorio.
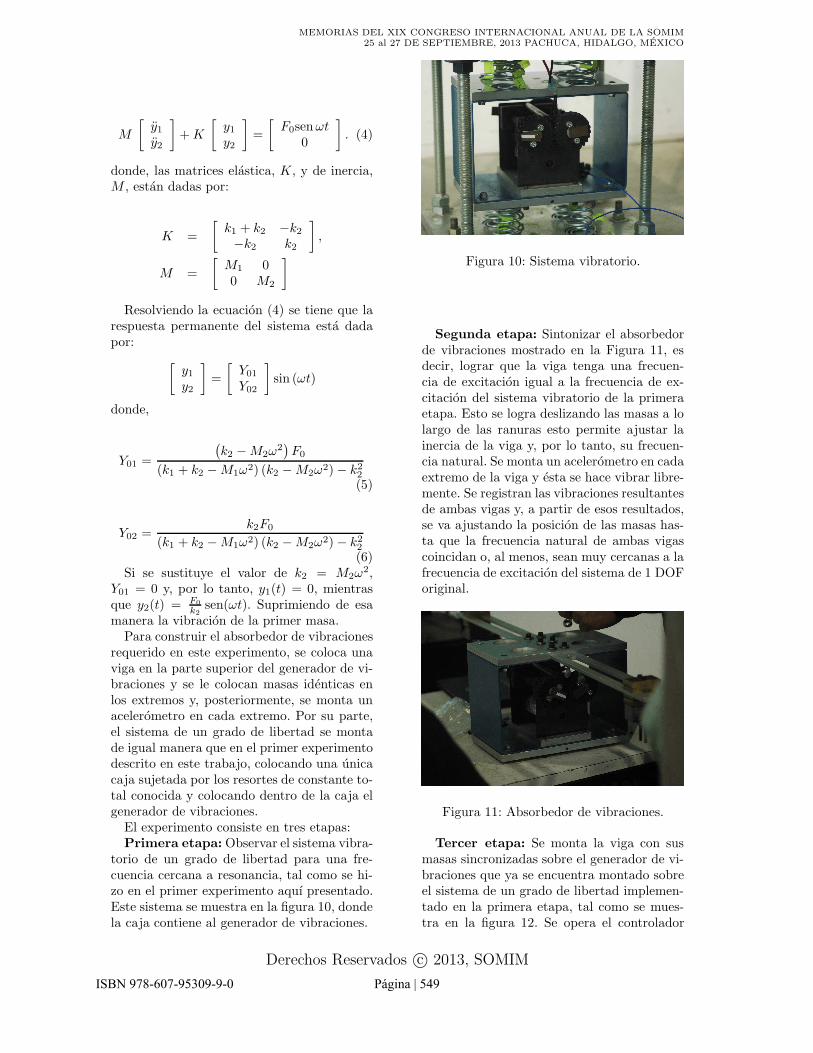
Segunda etapa: Sintonizar el absorbedorde vibraciones mostrado en la Figura 11, esdecir, lograr que la viga tenga una frecuen-cia de excitacion igual a la frecuencia de ex-citacion del sistema vibratorio de la primeraetapa. Esto se logra deslizando las masas a lolargo de las ranuras esto permite ajustar lainercia de la viga y, por lo tanto, su frecuen-cia natural. Se monta un acelerometro en cadaextremo de la viga y esta se hace vibrar libre-mente. Se registran las vibraciones resultantesde ambas vigas y, a partir de esos resultados,se va ajustando la posicion de las masas has-ta que la frecuencia natural de ambas vigascoincidan o, al menos, sean muy cercanas a lafrecuencia de excitacion del sistema de 1 DOForiginal.
Figura 11: Absorbedor de vibraciones.
Tercer etapa: Se monta la viga con susmasas sincronizadas sobre el generador de vi-braciones que ya se encuentra montado sobreel sistema de un grado de libertad implemen-tado en la primera etapa, tal como se mues-tra en la figura 12. Se opera el controlador
Derechos Reservados c© 2013, SOMIM
ISBN 978-607-95309-9-0 Página | 549

MEMORIAS DEL XIX CONGRESO INTERNACIONAL ANUAL DE LA SOMIM
25 al 27 DE SEPTIEMBRE, 2013 PACHUCA, HIDALGO, MEXICO
de la velocidad angular del excitador de vi-braciones hasta que esta coincida con la fre-cuencia de excitacion empleada en la primeraetapa. En esas circunstancias, la vibracion delsistema original debe desaparecer, o al menosdisminuir considerablemente, mientras que lavibracion de las vigas no deben ser excesivas.
Figura 12: Sistema de un grado de libertadcon absorbedor de vibraciones montado.
Resultados experimentales.
En esta seccion se muestran los resultados ex-perimentales obtenidos.
Primer etapa: La Figura 13 muestra lalectura obtenida en LabVIEW para el acele-rometro montado en en la caja del sistemade un grado de libertad cuando la fuerza deexcitacion tiene una frecuencia cercana a re-sonancia. La grafica mostrada en la parte su-perior izquierda de la Figura 13 muestra lasenal sin filtrar, la grafica en la parte superiorderecha muestra la transformada de Fourier lacual nos indica que la frecuencia natural es deaproximadamente 14.05 Hz, es decir 843 rpm.Por su parte, la grafica en la parte inferior dela Figura 13 muestra la senal filtrada. Se uti-lizo un filtro Butterworth con frecuencias decorte de 12 y 16 Hz. De esta grafica se tomo eltiempo entre 8 maximos:
t1 = 0.34343 s,
t2 = 0.90849 s,
n = 8 ciclos.
de manera que es posible calcular el periodoy la frecuencia
T =∆t
n=
t2 − t1n
= 0.07063 s,
f =1
T= 14.1577Hz,
de esta manera la frecuencia natural encon-trada experimentalmente es:
ωn = (14.1577Hz)(60 s) = 849.46 rpm (7)
Figura 13: Lectura del acelerometro montadoen la caja del sistema de un grado de libertad.
Ademas, debe notarse que la aceleracion dela vibracion es relativamente alta, del ordende 28 m/s2. Esta aceleracion se mide en laparte inferior de la caja que se muestra en lafigura 10. Debe notarse que el acelerometrono esta colocado en el centro de la caja puesese espacio esta ocupado por el generador devibraciones.Segunda etapa: Se logro ajustar la posi-
cion de las masas en la viga de manera quese llego a una frecuencia natural muy cercanaa la calculada en la etapa anterior. La lecturatomada se muestra en la Figura 14. Las trans-formadas de Fourier de las senales se mues-tran en las dos graficas de la parte inferior dela figura, estas graficas indican unas frecuen-cias naturales similares: 14.1006 Hz y 14.8550Hz, es decir 846.036 rpm y 891.3 rpm. Porsu parte, las graficas en la parte superior dela Figura 14 muestra la senal filtrada. Se uti-lizo un filtro Butterworth con frecuencias decorte de 12 y 16 Hz. De la primer grafica setomo el tiempo entre 5 maximos:
t1 = 0.35099 s,
t2 = 0.69738 s,
n = 5 ciclos.
Derechos Reservados c© 2013, SOMIM
ISBN 978-607-95309-9-0 Página | 550

MEMORIAS DEL XIX CONGRESO INTERNACIONAL ANUAL DE LA SOMIM
25 al 27 DE SEPTIEMBRE, 2013 PACHUCA, HIDALGO, MEXICO
de manera que es posible calcular el periodoy la frecuencia
T =∆t
n=
t2 − t1n
= 0.0693 s,
ω =1
T= 14.4346Hz = 866.07 rpm,
De manera semejante, de la segunda graficase tomo el tiempo entre 5 maximos:
t1 = 0.21961 s,
t2 = 0.56437 s,
n = 5 ciclos.
de manera que es posible calcular el periodoy la frecuencia
T =∆t
n=
t2 − t1n
= 0.0689 s,
ω =1
T= 14.50284Hz = 870.1705 rpm,
Tercer etapa: Para esta etapa se imple-mento en LabVIEW el VI mostrado en laFigura 15 el cual permite procesar y desple-gar las senales adquiridas. Una vez que se leha montado el absorbedor de vibraciones alsistema de un grado de libertad se repite elexperimento, haciendo girar el generador devibraciones a la misma velocidad angular queen la primera etapa. Se obtuvieron las graficasmostradas en la Figura 16. Una comparacionde la grafica de la vibracion de la caja con laFigura 13 muestra que se ha reducido conside-rablemente la vibracion, ya que en el caso sinabsorbedor (primera etapa), la aceleracion esdel orden de 25 m/s2, mientras que en el casocon absorbedor, la aceleracion se ha reducidoa un maximo de 0.1m/s2 aproximadamente.Por su parte, la aceleracion de la vibracion dela viga, que se muestra en la parte superiorde la Figura 16, es relativamente pequena delorden de 1m/s2. Como se muestra en la figura12, los acelerometros estan localizados en losextremos libres de la viga empotrada.
Figura 14: Lectura de los acelerometros mon-tados en los extremos de la viga. Arriba:senales filtradas. Abajo: transformadas deFourier.
Figura 15: VI implementado en LabVIEWpara la tercer etapa del experimento.
Derechos Reservados c© 2013, SOMIM
ISBN 978-607-95309-9-0 Página | 551

MEMORIAS DEL XIX CONGRESO INTERNACIONAL ANUAL DE LA SOMIM
25 al 27 DE SEPTIEMBRE, 2013 PACHUCA, HIDALGO, MEXICO
Figura 16: Lecturas de los acelerometros mon-tados en los extremos de la viga y en la caja.
SISTEMA VIBRATORIO DE TRES
GRADOS DE LIBERTAD SUJETO A
VBRACION FORZADA SIN AMOR-
TIGUAMIENTO.
En esta seccion, se analizara la respuesta deun sistema vibratorio de tres grados de liber-tad sujeto a vibracion forzada y sin amor-tiguamiento. Como muestra la Figura 17, estesistema cuenta con tres masas que puedendesplazarse verticalmente y que se encuen-tran conectadas por resortes de constantesk1, k2, k3 y k4, soportando su propio peso yla accion de una fuerza externa que varıacon el tiempo armonicamente de acuerdo aF (t) = F0senωt, donde F0 es proporcional alcuadrado de la frecuencia ω.
Figura 17: Sistema vibratorio de tres gradosde libertad sujeto a vibracion forzada.
Se sabe que las frecuencias naturales de unsistema como este, con 3 grados de libertad,pueden obtenerse resolviendo la ecuacion ca-
racterıstica
∣
∣K −Mω2n
∣
∣ = 0 (8)
donde, las matrices elastica, K, y de inercia,M , estan dadas por:
K =
k1 + k2 −k2 0−k2 k2 + k3 −k30 −k3 k3 + k4
,
M =
M1 0 00 M2 00 0 M3
Por su parte, los modos de vibracion secalculan obteniendo el kernel de la matrix[K − Mω2
n] para cada frecuencia natural, esdecir, para la frecuencia natural i se tiene:
[K −Mω2ni]
~Yi = ~0. (9)
La respuesta general del sistema viene dadapor:
~YG(t) = λ1~Y01 sen (ωn1t− φ1) +
+ λ2~Y02 sen (ωn2t− φ2) +
+ λ3~Y03 sen (ωn3t− φ3) +
+
Y01
Y02
Y03
sen(ωt)
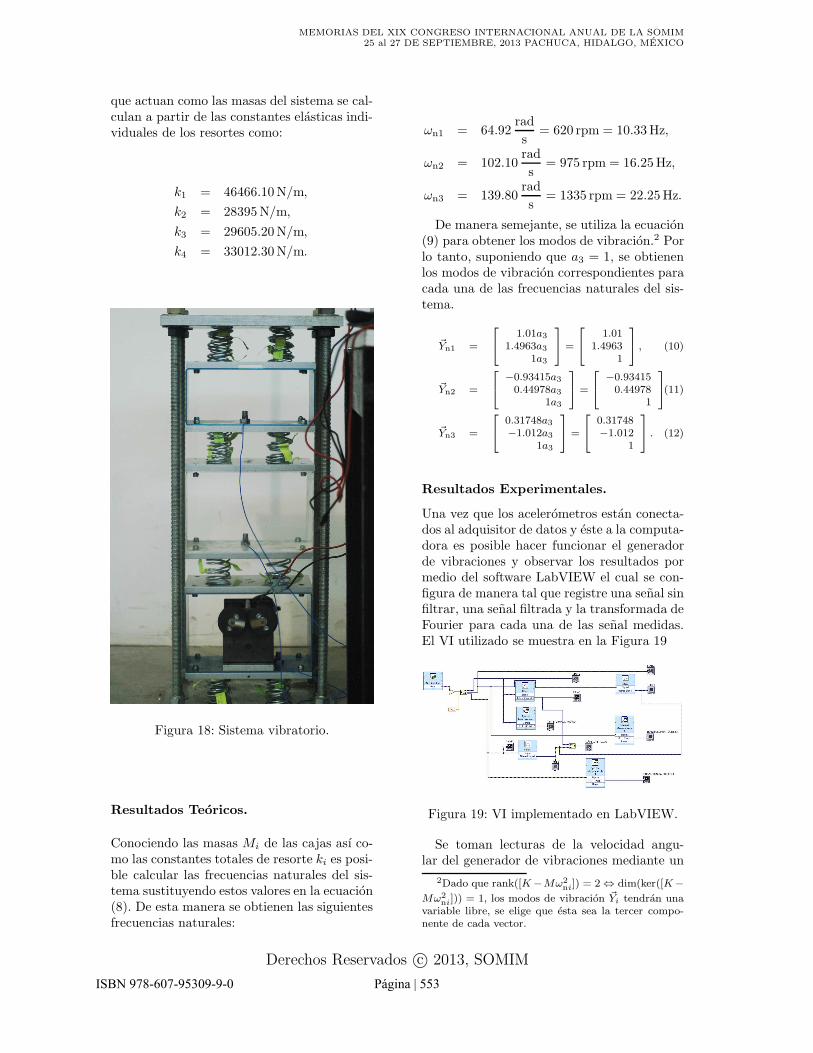
donde los primeros tres terminos representanla respuesta transitoria del sistema y, por lotanto, no son de nuestro interes.Para este experimento se arma el sistema
mostrado en la figura 18, se utilizan tres“cajas” del modulo, la primera de ellas con-tendra el generador de vibraciones. Estas “ca-jas” se conectan mediante 8 resortes, 4 inter-nos y 4 externos, entre sı y a las placas fijassuperior e inferior. Las masas de las cajas son:
M1 = 8.221 kg,
M2 = 4.750 kg,
M3 = 4.578 kg.
Por su parte, las constantes elasticas equi-valentes de los conjuntos de resortes, externose internos, que se colocan entre las “cajas”,
Derechos Reservados c© 2013, SOMIM
ISBN 978-607-95309-9-0 Página | 552
MEMORIAS DEL XIX CONGRESO INTERNACIONAL ANUAL DE LA SOMIM
25 al 27 DE SEPTIEMBRE, 2013 PACHUCA, HIDALGO, MEXICO
que actuan como las masas del sistema se cal-culan a partir de las constantes elasticas indi-viduales de los resortes como:
k1 = 46466.10N/m,
k2 = 28395N/m,
k3 = 29605.20N/m,
k4 = 33012.30N/m.
Figura 18: Sistema vibratorio.
Resultados Teoricos.
Conociendo las masas Mi de las cajas ası co-mo las constantes totales de resorte ki es posi-ble calcular las frecuencias naturales del sis-tema sustituyendo estos valores en la ecuacion(8). De esta manera se obtienen las siguientesfrecuencias naturales:
ωn1 = 64.92rad
s= 620 rpm = 10.33Hz,
ωn2 = 102.10rad
s= 975 rpm = 16.25Hz,
ωn3 = 139.80rad
s= 1335 rpm = 22.25Hz.
De manera semejante, se utiliza la ecuacion(9) para obtener los modos de vibracion.2 Porlo tanto, suponiendo que a3 = 1, se obtienenlos modos de vibracion correspondientes paracada una de las frecuencias naturales del sis-tema.
~Yn1 =
1.01a31.4963a3
1a3
=
1.011.4963
1
, (10)
~Yn2 =
−0.93415a30.44978a3
1a3
=
−0.934150.44978
1
(11)
~Yn3 =
0.31748a3−1.012a3
1a3
=
0.31748−1.012
1
. (12)
Resultados Experimentales.
Una vez que los acelerometros estan conecta-dos al adquisitor de datos y este a la computa-dora es posible hacer funcionar el generadorde vibraciones y observar los resultados pormedio del software LabVIEW el cual se con-figura de manera tal que registre una senal sinfiltrar, una senal filtrada y la transformada deFourier para cada una de las senal medidas.El VI utilizado se muestra en la Figura 19
Figura 19: VI implementado en LabVIEW.
Se toman lecturas de la velocidad angu-lar del generador de vibraciones mediante un
2Dado que rank([K−Mω2
ni]) = 2 ⇔ dim(ker([K−
Mω2
ni])) = 1, los modos de vibracion ~Yi tendran una
variable libre, se elige que esta sea la tercer compo-nente de cada vector.
Derechos Reservados c© 2013, SOMIM
ISBN 978-607-95309-9-0 Página | 553
MEMORIAS DEL XIX CONGRESO INTERNACIONAL ANUAL DE LA SOMIM
25 al 27 DE SEPTIEMBRE, 2013 PACHUCA, HIDALGO, MEXICO
tacometro optico hasta llegar a la cercanıa dela frecuencia natural a analizar, comenzandodesde 0 rpm y aumentando poco a poco.
El resultado obtenido en LabVIEW parala primer frecuencia natural se muestra en laFigura 20.
Figura 20: Lectura de la senal.
La transformada de Fourier para las tressenales indican que la frecuencia dominantetiene como valores maximos y mınimos10.1547Hz y 10.0928Hz, estos resultados ve-rifican que el sistema esta en resonancia y queesta resonancia corresponde a la primera fre-cuencia natural del sistema. Se puede observarque las tres masas se encuentran en resonan-cia y ademas estan en fase. Las lecturas delas aceleraciones (en m/s2) maximas de cadamasa estan dadas por:
Y1 = 17.1562 Y2 = 26.2106 Y3 = 17.1562
Con base en estos valores es posible obtenerlos modos de vibracion experimentales:
Y1
Y3
=17.1562
17.1562= 1
Y2
Y3
=26.2106
17.1562= 1.5277
por lo tanto:
~Y1 =
11.5277
1
.
Este resultado experimental es una muybuena aproximacion al resultado teoricomostrado en la ecuacion (10).
El resultado obtenido en LabVIEW para lasegunda frecuencia natural se muestra en laFigura 21.
Figura 21: Lectura de la senal.
Se puede observar que las masas 2 y 3 estanen fase, mientras que la senal de la masa 1esta en contrafase. Las lecturas de las acelera-ciones maximas de cada masa son:
Y1 = −38.8768 Y2 = 17.431 Y3 = 41.4627
donde el signo negativo indica que la masavibra o esta en contrafase.
Con base en estos valores es posible obtenerel modo de vibracion experimental:
Y1
Y3
=−38.8768
41.4627= −0.9376
Y2
Y3
=17.431
41.4627= 0.4204
por lo tanto:
~Y2 =
−0.93760.4204
1
.
Este resultado experimental es una muybuena aproximacion al resultado teoricomostrado en la ecuacion (11).
El resultado obtenido en LabVIEW parala tercer frecuencia natural se muestra en laFigura 21.
Figura 22: Lectura de la senal.
Derechos Reservados c© 2013, SOMIM
ISBN 978-607-95309-9-0 Página | 554

MEMORIAS DEL XIX CONGRESO INTERNACIONAL ANUAL DE LA SOMIM
25 al 27 DE SEPTIEMBRE, 2013 PACHUCA, HIDALGO, MEXICO
Se puede observar que las masas 1 y 3 estanen fase, mientras que la senal de la masa 2esta en contrafase. Las lecturas de las acelera-ciones maximas de cada masa son:
Y1 = 16.5079 Y2 = −37.2921 Y3 = 36.0436
Con base en estos valores es posible obtenerel modo de vibracion experimental:
Y1
Y3
=16.5079
36.0436= 0.4579
Y2
Y3
=−37.2921
36.0436= −1.0346
por lo tanto:
~Y3 =
0.4579−1.0346
1
.
Excepto por la primer componente, esteresultado experimental es una muy buenaaproximacion al resultado teorico mostrado enla ecuacion (12).
CONCLUSION.
La contribucion presenta tres distintos exper-imentos que pueden realizarse mediante unprototipo desarrollado en la propia universi-dad y que permiten verificar los resultados dela teorıa de sistemas vibratorios discretos deuno o varios grados de libertad. Es importantenotar que el origen de esta contribucion fue laspracticas realizadas por tres de los autores enun curso de Laboratorio de Dinamica y Vi-braciones que se ofrecio por primera vez ennuestra institucion.
AGRADECIMIENTOS.
Los autores agradecen a los tecnicos J. JesusLosoya Romero, Juan Zavala Flores, MiguelAngel Losoya Romero y J. Guadalupe NegreteRomero del taller mecanico de la Division deIngenierıas del Campus Irapuato-Salamancapor su desinteresada ayuda. Igualmente, seagradece a la Direccion de Apoyo a la In-vestigacion y al Posgrado de la Universidadde Guanajuato, antes DINPO, por el apoyoal proyecto “Desarrollo de una plataforma
portatil para el analisis de fenomenos dinami-cos, en particular, en vibraciones mecanicasen prototipos didacticos” de la convocato-ria institucional 2009. Este apoyo permi-tio adquirir los acelerometros y tarjeta deadquisicion de datos necesarias para el desa-rrollo de los experimentos.
Referencias
[1] Thompson, W.T. y Dahleh, M.D., The-
ory of Vibration with Applications,Prentice-Hall: Upper Saddle River, N.J.,1998.
[2] Inman, D.J., , Engineering Vibration,Prentice-Hall: Upper Saddle River, N.J.,2001.
[3] LabVIEW User Manual, NationalInstruments Corporation, Part Number320999E-01, 2003.
Derechos Reservados c© 2013, SOMIM
ISBN 978-607-95309-9-0 Página | 555

















![“Diseño y construcción de un dodecápodo articulado ...somim.org.mx/memorias/memorias2013/pdfs/A1/A1_39.pdf · zado al mecanismo completo [4], este programa nos permitirá obtener](https://img.pdfslide.net/doc/110x75/5e231a6636a71f44aa16bb21/aoediseo-y-construccin-de-un-dodecpodo-articulado-somimorgmxmemoriasmemorias2013pdfsa1a139pdf.jpg)

![GENERACIÓN AUTOMÁTICA DE TRAYECTORIAS DE HERRAMIENTA PARA ...somim.org.mx/memorias/memorias2013/pdfs/A3/A3_30.pdf · es alta, se pueden procesar componentes grandes, etc., [5]](https://img.pdfslide.net/doc/110x75/5c0dbd1909d3f27d5f8bd48d/generacion-automatica-de-trayectorias-de-herramienta-para-somimorgmxmemoriasmemorias2013pdfsa3a330pdf.jpg)









![ESTUDIO EXPERIMENTAL DE UN FLUJO …somim.org.mx/memorias/memorias2013/pdfs/A5/A5_21.pdf · AI Tamaño del área de interrogación [pix] mm milímetros [mm] ppm Partes por millón](https://img.pdfslide.net/doc/110x75/5ba4fa6609d3f257608c246d/estudio-experimental-de-un-flujo-somimorgmxmemoriasmemorias2013pdfsa5a521pdf.jpg)